Formelsammlung
Werbung

Formelsammlung
Jan Braun
VCC!"
maxon academy
nL
ML
Systematik der Selektion
Schritt 1
Übersicht
Situation
Umgebungsbedingungen
Leistung
Kommunikation
)
v(t), F(t
Start
Antriebsauswahl
Schritt 2
Last
Übersicht, Situationsanalyse,
Vorauswahl Regler & Sensor
Kap. A.1
Bewegung der Last
Kap. A.2
nein
Mechanische
Umformung?
Mechanische Antriebsauslegung
Kap. 3
nein
ja
Auswahl Getriebe
Kap. 3.4
Schritt 4
Getriebe
Schritt 5 + 6
Motortyp
Wicklung
Schritt 7
Sensor
Regler
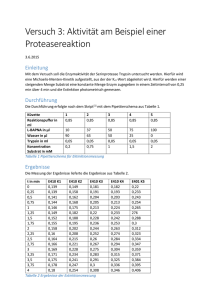
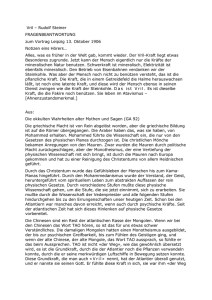
In der Situationsanalyse ist zuerst der Antrieb gesamthaft in seinem Umfeld darzustellen. Ziel ist,
eine Übersicht zu gewinnen, die prinzipielle Lösbarkeit aufzuzeigen und sich ein Bild über die
Randbedingungen und Einschränkungen zu machen. Siehe Kap. A.1: Übersicht, Situationsanalyse
Ziel dieses Schrittes ist, die Bewegung der Last in wenigen Schlüsselanforderungen zusammenzufassen. Schlüsselanforderungen sind die Kräfte (Drehmomente) und Geschwindigkeiten (Drehzahlen). Wie lange wirken sie? Welche Regelgenauigkeit ist gefordert? Siehe Kap. A.2: Bewegung
der Last
Die mechanische Antriebsauslegung kann übersprungen werden, wenn die Last direkt angetrieben
wird und keine mechanische Umformung dazwischen geschaltet ist.
ja
Einsatz
Getriebe?
Schritt 3
Antrieb
Mechanische Antriebe wandeln mechanische Leistung in mechanische Leistung um. Für die
Auswahl des Antriebs werden die Schlüsseldaten der Last auf den Ausgang des Getriebes oder
Motors umgerechnet. Siehe Kap. 3: Mechanische Antriebe
Der Punkt Auswahl Getriebe kann ausgelassen werden, wenn kein (maxon-) Getriebe verwendet
wird. Getriebe werden typischerweise eingesetzt, wenn hohe Drehmomente bei kleinen Drehzahlen
verlangt werden.
Am Ende dieses Schrittes steht fest, welches maxon-Getriebe verwendet werden soll. Aus der
Getriebeuntersetzung und dem Wirkungsgrad lassen sich die Schlüsseldaten für die Motorauswahl
berechnen. Siehe Kap. 3.4: maxon-Getriebe
Auswahl Motortyp
Kap. 6.5
Anhand der Drehmoment- und Drehzahlanforderungen werden nun passende Motortypen
gesucht. Zu berücksichtigen sind ebenfalls Überlegungen zu Lebensdauer, Kommutierung und
Lagerung. Siehe Kap. 6.5: Motorauswahl
Auswahl Wicklung
Kap. 6.5
Die Auswahl der Wicklung geschieht über den Vergleich der am Motor anliegenden Spannung
mit der Drehzahl, sowie des zur Verfügung stehenden Stroms mit den Drehmomentanforderungen.
Siehe Kap. 6.5: Motorauswahl
Verifikation Regler & Sensor
Kap. A.3
Der letzte Schritt dient der !"#$%&'($)*+,)*+-"./"#+0*1+2"*3)#. Es muss überprüft werden, ob die
Vorauswahlen von Regler und Sensor in der Situationsanalyse (Schritt 1) mit dem ausgewählten
Motor kompatibel sind. 2$"4"+5'67+879:+!"#$%&'($)*+-"./"#+0*1+2"*3)#
Antrieb ausgewählt
Vorwort
Bei der vorliegenden Formelsammlung werden die wichtigsten Formeln in Zusammenhang aller
Komponenten des Antriebssystems aufgelistet. Dies ausgehend von einem Flussdiagramm, welches
eine rasche Antriebsauswahl unterstützt. Zahlreiche Illustrationen und die klare Beschreibung der
Symbole auf der jeweiligen Seite unterstützen die Lesbarkeit der Formeln.
Im weitesten Sinne handelt es sich um eine Sammlung der wichtigsten Formeln aus dem maxonKatalog, sowie aus dem Buch «Auslegung von hochpräzisen Kleinstantrieben», erschienen im
maxon academy Verlag.
Der Anstoss zum Schreiben dieser Formelsammlung war das Buch «Auslegung von hochpräzisen
Kleinstantrieben» von Dr. Urs Kafader, in welchem das umfangreiche Wissen aus der fast
50-jährigen Erfolgsgeschichte der maxon-Gleichstromantriebe kleiner Leistung (unter etwa 500
Watt) niedergeschrieben ist. Diese Sammlung soll Ingenieuren, Dozenten und Studierenden als
perfekte Ergänzung zum oben genannten Buch dienen.
Dank
Mein erster Dank gilt Dr. Urs Kafader, der mich ermuntert hat, diese Sammlung an die Hand
zu nehmen. Die professionelle Gestaltung und die Abbildungen sind das Werk von Patricia
Gabriel und Beni Anderhalden. Urs Kafader, Barbara Schlup, Anja Schütz, Patrik Gnos, Stefan
Baumann, Martin Rüegg, Michael Baumgartner, Martin Windlin, Jens Schulze, Albert Bucheli,
Martin Odermatt und Walter Schmid haben das Manuskript durchgesehen und wertvolle
Verbesserungsvorschläge eingebracht. Bei meinen Anliegen und Fragen erhielt ich bereitwillig
Unterstützung von vielen weiteren Personen bei maxon motor ag.
Sachseln, im Frühling 2012
Jan Braun
!"#$%&'()#!*+!
,#!*+!-#.)/0'(#1'234#'5'6)17-#8'59:)04#
Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, insbesondere die der Übersetzung in fremde
Sprachen, Vervielfältigung, Speicherung in Datenverarbeitungsanlagen, des Nachdruckes und
Vortrages, sind vorbehalten. Sofern Warenbezeichnungen, Gebrauchsnamen usw. in diesem Werk
genannt werden, berechtigt dies nicht dazu, anzunehmen, dass diese im Sinne des Warenzeichenund Markenschutzrechtes als frei zu betrachten wären. Alle in diesem Werk gemachten Angaben,
insbesondere auch hinsichtlich Zahlen, Applikationen, Dosierungen usw. sowie Ratschläge und
Empfehlungen sind sorgfältig abgewogen; dennoch kann dafür, wie auch für das völlige Fehlen
von Druckfehlern keine Gewähr übernommen werden. Die Richtigkeit gemachter Angaben muss
im Einzelfall vom Anwender selbst überprüft werden. Haftung der Autoren, des Herausgebers und/
oder seiner Beauftragten für Personen-, Sach- sowie Vermögensschäden ist ausgeschlossen.
Inhalt
A.
A.1
A.2
$";#
1.
1.1
1.2
1.3
Antriebsauswahl
Übersicht, Situationsanalyse
Bewegung der Last
.)/<=>'?<34#@)(0)/#%46#8)4:3/#
Masse, Kraft, Drehmoment
Kräfte Allgemein
Drehmomente Allgemein
Trägheitsmomente verschiedener Körper
bezüglich der Hauptachsen durch den Schwerpunkt S
12
2.
2.1
2.2
!";#
!"J#
3.
3.1
3.2
3.3
3.4
4.
4.1
5.
5.1
5.2
5.3
5.4
6.
6.1
I"!#
6.3
6.4
6.5
7.
;7+
A"+#
A"!#
A";#
9.
9.1
9.2
9.3
9.4
10.
+*"+#
+*"!#
11.
Kinematik
Lineare (translative) Bewegung
Rotative Bewegung
B7C<:59)#0<4)'/)#D?/'4:0'?<E)F#G)H)(%4(:C/3=0)#
B7C<:59)#/3?'?<E)#G)H)(%4(:C/3=0)#
Mechanische Antriebe
Mechanische Umformung
Umformung mechanische Antriebe Translation
Umformung mechanische Antriebe Rotation
maxon-Getriebe
Lagerung
Eigenschaften von Sintergleitlagern und Kugellagern im Vergleich
Elektrotechnik
Grundlagen Gleichspannung
Elektrische Widerstandsschaltungen
Grundlagen Wechselspannung
Einfache Filter
maxon-Motoren
Allgemeines
K)<:?%4(:L)?/'59?%4(#<1#MNOP3?3/#$00()1)<4#
Motorkonstanten und -kennlinien
Beschleunigung
Motorauswahl
maxon sensor
<'=)*>-"./"#
G)?/<)L:Q%'6/'4?)4#
$%:0)(%4(#6)/#8?/31E)/:3/(%4(#
S/T::)#6)/#P3?3/6/3::)0#L)<#UVPO@)(0)/4#
Thermisches Verhalten
Grundlagen
Dauerbetrieb
Zyklus- und Aussetzbetrieb (kontinuierlich wiederholt)
Kurzzeitbetrieb
Tabellen
1'234OW1/)594%4(:?'L)00)4#
B7C<:59)#@)<L%4(:>3)X=Y<)4?)4#XZ/#@300O-#['X?O#%46#S0)<?/)<L%4(#
Symbolliste Formelsammlung
14
14
15
+I
+A
21
21
22
25
26
27
27
29
29
31
33
34
35
35
;A
39
41
42
43
45
JR
JR
JI
47
47
49
51
52
53
R;
RJ
56
6
6
7
A
9
9
11
A.
A.1
Antriebsauswahl
Übersicht, Situationsanalyse
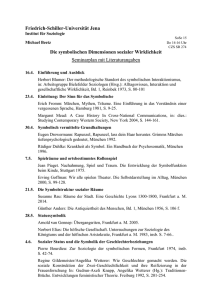
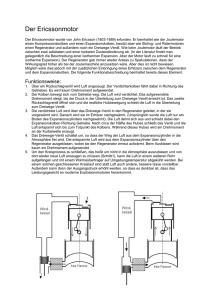
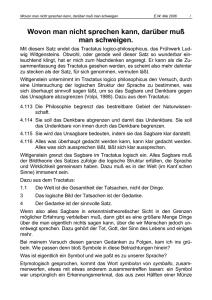
Bevor der eigentliche Selektionsprozess startet, ist eine Auseinandersetzung mit der Antriebssituation als Ganzes nötig. Dabei werden auch die Variationsbreiten der Schlüsselparameter
festgelegt. In der Regel sind die verschiedenen Aspekte stark miteinander vernetzt. Die folgenden Punkte sollen helfen, Klarheit zu schaffen und den Rahmen für den weiteren Selektionsverlauf abzustecken.
Mechanische Auslegung
JS
mR
d1
J1
p
J2
d2
Liegt eine translative oder rotative Bewegung vor? Mit welchem Antrieb (Spindel,
Zahnriemen, usw.) oder mit welcher Antriebskombination wird sie realisiert? Wird direkt
angetrieben?
-"."/&)*?"6(+@"3(/"."*
Ausgabe
Sollwert
Aktuator
Feedback
Sensor
zu messender
Wert
Was soll geregelt werden: Strom, Drehzahl,
Position? Mit welcher Genauigkeit? Reicht ein
offener Regelkreis? Wie wird die Regelgrösse
gemessen? Woher kommen Befehle und Sollwerte? Dies führt bereits zu einer Vorselektion
für mögliche Regler und Sensoren; d.h. für
Selektionsschritt 7 (siehe Seite 2).
Leistungsüberprüfung
Steht genügend elektrische Leistung zur Verfügung, um die Last in allen Betriebsbedingungen anzutreiben und um die zu erwartenden
Verluste im Antriebsstrang auszugleichen? Wie
gross ist die maximal zur Verfügung stehende
Spannung, wie gross der Strom?
-'*1A"1$*.0*."*+@"3(4'/("*
d
l
Gibt es Einschränkungen bei den Abmessungen? In welcher Umgebung (Temperatur,
Atmosphäre, …) soll der Antrieb funktionie/)4\#PZ::)4#L):346)/)#8C)Y<=>'?<34)4#%46#
Qualitätsstandards eingehalten werden? Was
ist die geforderte Lebensdauer?
Ökonomische Überlegungen
Die ökonomischen Überlegungen dürfen
natürlich nicht vergessen werden. Wie kann
der Antrieb möglichst kostengünstig gestaltet
und trotzdem den Anforderungen bezüglich
Technik und Lebensdauer gerecht werden?
Detaillierte Informationen hierzu im Buch «Auslegung von hochpräzisen Kleinstantrieben», Kap. 3.
6
maxon-Formelsammlung
A.2
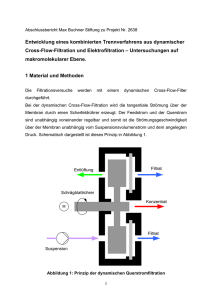
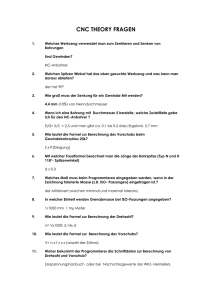
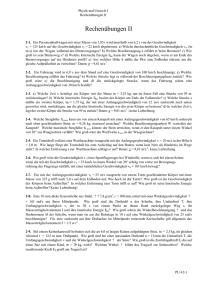
Bewegung der Last
Die auszuführenden Bewegungen werden bei der Bestimmung der Lastanforderungen festge0)(?"#V<59?<(#<:?-#6<)#G)H)(%4(:C/3=0)#Y%#6)=4<)/)4#%46#:<59#Y%#ZL)/0)()4#1<?#H)059)4#]<4:'?Yzeiten zu rechnen ist.
Arbeitspunkte
Geschwindigkeit v
Drehzahl n
1
2
3
4
1
Zeit t
Geschwindigkeit v
Drehzahl n
2
3
1
4
Für die Festlegung der zugehörigen Arbeitspunkte (Wertepaare aus Drehmoment und
Drehzahl oder Kraft und Geschwindigkeit)
sind die jeweiligen Gesamtkräfte und
-drehmomente wichtig. Dafür müssen alle
wirkenden Kräfte und Drehmomente bestimmt
werden, die wiederum von den Trägheitsmomenten und Beschleunigungswerten
abhängen.
Für die Selektion reicht es, diese Werte mit
)<4)/#S)4'%<(>)<?#E34#)?H'#+*#^#Y%#)/1<??)04"
Kraft F, Drehmoment M
Mechanisches Spiel des Antriebs
Verdrehwinkel °
0.4
0.2
0
-1500
-1000
-500
0
-0.2
500
1000 1500
Prüfmoment mNm
Ebenfalls gilt es die Frage nach dem maximal
zulässigen mechanischen Spiel des Antriebs
zu klären.
-0.4
Schlüsselwerte
Kraft F
Drehmoment M
Fmax/Mmax
Die für die Auswahl des Antriebs wichtigen
Schlüsselwerte, welche die Last charakterisieren, lassen sich schliesslich aus den Arbeitspunkten bestimmen.
FRMS/MRMS
∆tmax
∆ttot
Zeit t
Detaillierte Informationen hierzu im Buch «Auslegung von hochpräzisen Kleinstantrieben», Kap. 4.
maxon-Formelsammlung
7
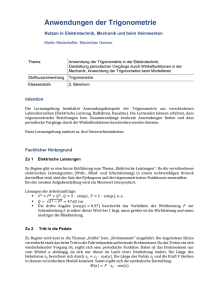
879+ !"#$%&'($)*+-"./"#+0*1+2"*3)#
G)<#6)/#.)/<=>'?<34#E34#-"./"#+0*1+2"*3)# wird überprüft, ob deren Vorauswahl in der
Situationsanalyse (Selektionsschritt 1, siehe Seite 2) zum gefundenen Motor kompatibel ist. Die
geeigneten Komponenten (Regler und Sensor) lassen sich durch die detaillierte Betrachtung der
$%:():?'0?%4(#6):#@)()0>/)<:):#6)=4<?<E#L):?<11)4"#
-"./"#+)1"#+B)($)*+C)*(#)//"#
In höher entwickelten Antriebssystemen ist
der Regler oder Motion Controller das zentrale
Element. Dort laufen alle Fäden zusammen.
Deshalb muss er einer Reihe von
unterschiedlichsten Anforderungen genügen.
Der Regler muss
– die richtige Stellgrösse mit genügender
Genauigkeit in sinnvoller Zeit regeln
können
– die Informationen des Sensors
verarbeiten können
– die Befehle und Sollwerte des
übergeordneten Systems verstehen
– die benötigte elektrische Leistung bringen
– zur Motorart (DC oder EC) und zur
Kommutierung passen
Sensor
Der Sensor (Encoder, DC-Tacho
oder Resolver) muss grundsätzlich
zur Regelaufgabe und den anderen
Komponenten passen.
Zusätzlich gelten die folgenden weiteren
Auswahlkriterien.
Der Sensor muss
– gemäss maxon-Baukastensystem auf den
Motor montiert werden können.
– die richtige Stellgrösse
(Drehzahl, Drehmoment, Drehrichtung)
# 1<?#()4Z()46)/#$%&T:%4(#1)::)4"
# _'%:?/)()0`#M<)#$%&T:%4(#6):#
Sensors sollte mindestens viermal höher
sein, als die geforderte Genauigkeit der
Stellgrösse.
Detaillierte Informationen hierzu im Buch «Auslegung von hochpräzisen Kleinstantrieben», Kap. 9.
A#
1'234O_3/1)0:'110%4(
1.
Masse, Kraft, Drehmoment
1.1
Kräfte Allgemein
Die Kraft, welche die Masse 1 kg in 1 s um 1 m/s beschleunigt, hat die Einheit kg · m/s2 mit dem
besonderen Einheitennamen Newton (N).
Typische Teilkräfte in Antriebssystem
Kraft zur Beschleunigung =
Masse x Beschleunigung
[F] = kg · m/s2 = kgm/s2 = N
Fa
m
Fa = m · a = m · !v
!t
Gravitation
(Erdbeschleunigung
FG = m · g
g = 9.81 m/s2!"!#$%&!'()*!+!&,!'()*)
m
FG
Kräfteaufteilung an der schiefen
Ebene in Hangabtriebskraft und
Normalkraft
FH
!
FG
FN
FR
FH = FG!-!./0 1
FN = FG!-!23. 1
Reibkraft
Gleitende Reibung
FR!"!4!-!5N
Federkraft Druck-, Zugfedern
FS! "!)!-!67
Druckkraft
Fp = p · A
FN
FP
p
Symbol
A#
F
Fa
FG
FH
FN
Fp
FR
FS
a
Name
SI
a%)/:594<??:&b59)#
12
Kraft (Force)
N
Beschleunigungskraft
N
Gewichtskraft Körper
N
Hangabtriebskraft
N
Normalkraft (Kraft senkrecht zur Ebene)
N
Druckkraft
N
Reibkraft
N
Federkraft
N
Beschleunigung
m/s2
maxon-Formelsammlung
Symbol
g
k
m
p
1
67
68
69
4#
Name
Fallbeschleunigung
Federkonstante
Masse
Druck (1 Pa = 1 N/m2#c#+*-5 bar)
Winkel schiefe Ebene
Auslenkung aus Ruhelage
Zeitdauer
Geschwindigkeitsänderung
@)<L%4(:Y'90#D:<)9)#B'L)00)#d'C"#+*"!F
SI
m/s2
N/m
kg
Pa
°
m
s
m/s
9
Berechnung der gesamten Lastkraft bestehend aus Teilkräften
F1
Fx
F2
Addition gleichgerichteter Kräfte
FL = F1 + F2 + ...+ F:
Addition gegengerichteter Kräfte
FL = F1!;!52!;!$$$;!5:
Addition senkrecht zueinander
stehender Kräfte
FL = F1 + F2
FL
F1
FL
Fx
F2
F1
FL
Symbol
FL
F1 /F2 /Fx
+*
Name
Lastkraft (Abgang)
Teilkräfte
F2
2
2
SI
N
N
maxon-Formelsammlung
1.2
Drehmomente Allgemein
Das Drehmoment ist ein Mass für die Drehwirkung, die eine Kraft auf ein drehbares System
ausübt. Es spielt für die Rotation die gleiche Rolle, wie die Kraft für die geradlinige Bewegung.
M<)#S0)<59%4()4#()0?)4#<11)/#L)YZ(0<59#)<4)/#6)=4<)/?)4#M/)9'59:)"
Allgemein
r
F
Drehmoment = Kraft x Hebelarm
[M] = N · m = Nm
M
M=F·r
Typische Teilmomente in Antrieben
Drehmoment zum Beschleunigen von Massenträgheiten
Drehmoment = Trägheitsmoment x Winkelbeschleunigung
(Berechnung von Trägheitsmomenten siehe folgende Seiten)
r
M! "#$#%#!#"#$#% &(
&'
"
#%
M! = J ·
·
30 #$
Reibung Kugel- und
Sintergleitlager (vereinfacht)
MR = µ · FKL · rKL
Drehmoment von Spiral- oder
Schenkelfedern
MS = km e!6<
Berechnung des Lastmomentes bestehend aus Teilmomenten
M1
Mx
M2
ML
M1
ML
Symbol
F
FKL
J
M
ML
MR
MS
M1
M1 /M2 /Mx
km
Mx
M2
Addition gleichgerichteter
Drehmomente
ML = M1 + M2 + ...+ M:
Addition gegengerichteter
Drehmomente
ML = M1!;!=2!;!$$$;!=:
Name
Kraft (Force)
Lagerbelastung axial/radial
Massenträgheitsmoment
Drehmoment
Lastdrehmoment
Reib(dreh)moment
Drehmoment Spiralfeder
Drehmoment für Beschleunigung
Teilmomente
Direktionsmoment (Federkonstante)
maxon-Formelsammlung
SI
N
N
kgm2
Nm
Nm
Nm
Nm
Nm
Nm
Nm
Symbol
r
rKL
1
68
6<
6>
4#
Name
SI
Radius
m
Mittlerer Lagerdurchmesser
m
Winkelbeschleunigung
rad/s2
Zeitdauer
s
Drehwinkel
rad
Winkelgeschwindigkeitsänderung
rad/s
@)<L%4(:Y'90#D:<)9)#B'L)00)#d'C"#+*"!F
Symbol
60
Name
Drehzahländerung
maxon
min-1
11
F79+
+
G#H.4"$(3<)<"*("+,"#3I4$"1"*"#+5J#6"#
A"?K./$I4+1"#+E'06('I43"*+10#I4+1"*+2I4L"#60*&(+2
Körper
Abbildung
Masse, Trägheitsmomente
5#"$3?D/$*1"#
!"#"$"%"&"%"r 2"%"'
Jx = 1 %"!"%"r 2
2
Jy = Jz = 1 %"!"%"(3r 2 + ' 2)
12
E)4/?D/$*1"#
!"#"$"%"&"%"(ra2"'"(i2) %")""
1
2
Jx"#""""%"!"%"(r
+ ri2)
a
2
2
Jy = Jz = 14 %"!"%""(a2 + ri2 + )3
Kreiskegel
m = 31 !"$"!"%"!"r 2 !"&
3
Jx = 10 !"#"!"r 2
3
Jy = Jz = 80 !"#"!"(4r 2 + h2)
Kreiskegelstumpf
1
2
!"#""""$"%"$"&"$"(r
+ r2r1+ r12) $"'
2
3
r25 !"r15
3
Jx"#""""""$"!"$
10
r23 !"r13
Kreistorus
m = 2!"#"$ 2"#"r 2 #"%""
Jx = Jy = 81 #"&"#"(4%2 + 5r 2)
Jz = 41 #"&"#"(4%2 + 3r 2)
Kugel
m = 43 !"#"!"$"!"r 3
Jx = Jy = Jz = 25 !"%"!"r 2
Symbol
Jx
Jy
Jz
R
12
Name
Massenträgheitsmoment
bezüglich der Drehachse x
Massenträgheitsmoment
bezüglich der Drehachse y
Massenträgheitsmoment
bezüglich der Drehachse z
Radius Kreistorus um z-Achse
SI Symbol
h
kgm2 m
r
kgm2 ra
ri
kgm2 r1
m r2
?
Name
Höhe
Masse
Radius
Aussenradius
Innenradius
Radius 1
Radius 2
Dichte
SI
m
kg
m
m
m
m
m
kg/m3
maxon-Formelsammlung
Körper
Abbildung
Masse, Trägheitsmomente
4
!"#"""""$"%"$"&"$"(
ra3"'"(i3)
3
Hohlkugel
ra "'"(i
2
Jx = Jy = Jz"#""""$"!"$"
3
3
5
5
5
ra "'"(i
m = !"#"$"#"%"#"&"
1
Jx = 12 #"'# (%2 + &2)
Quader
Dünner Stab
y
m !"#"$"%"$"&
1
2
Jx = Jz"!""""""$"'"$"&
12
-"I4("I&6D#'<$1"
1
!"#""""$"%"$"&"$"'"$"("
3
1
2
Jx"#""""""$"!"$"(&
+ ' 2)
20
1
2
Jy"#""""""$"!"$"('
+ 3 ( 2)
20
4
M"/$"A$."#+-)('($)*3&J#6"#
m = !"#"$"#"%x1 f 2(x) #"&'"""
x2
1
Jx = 2 #"!"#"$"#"%x1 f 4(x) #"&'
2'(?+,)*+2("$*"#
Trägheitsmoment bezüglich
einer parallelen Drehachse
x im Abstand rs zur Achse s
durch den Schwerpunkt S.
Jx = m !"r s2 + Js
x2
Symbol
A
Js
Jx
Jy
Jz
a
Name
Querschnitt
Massenträgheitsmoment bezüglich der
Achse s durch den Schwerpunkt S
Massenträgheitsmoment
bezüglich der Drehachse x
Massenträgheitsmoment
bezüglich der Drehachse y
Massenträgheitsmoment
bezüglich der Drehachse z
Länge Kante a
maxon-Formelsammlung
SI Symbol
m2 b
c
kgm2 h
l
kgm2 m
ra
kgm2 ri
rs
kgm2 ?
m x1
x2
Name
SI
Länge Kante b
m
Länge Kante c
m
Höhe
m
Länge
m
Masse
kg
Aussenradius
m
Innenradius
m
Abstand der Achse s von Schwerpunkt S
m
Dichte
kg/m3
Punkt 1 auf der x-Achse
m
Punkt 2 auf der x-Achse
m
13
2.
N7F+
Kinematik
O$*"'#"+P(#'*3/'($,"Q+M"L".0*.
Gleichförmige Bewegung
Geschwindigkeit v
!s
Geschwindigkeit
9!"!6.!(!68 = konstant
[v] = m/s
v
!t
v = !#
!"
6.!"!9!-!68
Zeit t
Konstante Beschleunigung aus dem Stand
Beschleunigung
@!"!69!(!68 = konstant
[a] = m/s2
Geschwindigkeit v
69!"!@!e!68
1
2
!"#$####%#&#%#!t
2
!v
69!"!*!e!68
!s
!t
Zeit t
Freier Fall
h = 1 · g · !t 2
2
Konstante Beschleunigung aus Grundgeschwindigkeit
Geschwindigkeit v
!s
vend
vend = vstart + a e!68
vstart
1 '#)#!& 2
!"#$#%"&'(&#)#!&#*####
2
!t
Symbol
a
g
h
6.
Name
Beschleunigung
Fallbeschleunigung
Fallhöhe
Weg
Zeit t
SI
m/s2
m/s2
m
m
Symbol
8A!68
9A!69
vend
vstart
Name
Zeit, Zeitdauer
Geschwindigkeit, (-sänderung)
Geschwindigkeit nach Beschleunigung
Geschwindigkeit vor Beschleunigung
SI
s
m/s
m/s
m/s
Anmerkungen:
– Die eingefärbten Flächen stellen den während des Zeitabschnittes 68 zurückgelegten Weg 6. dar.
14
maxon-Formelsammlung
N7N+
-)('($,"+M"L".0*.+
Allgemein
Umrechung zwischen
Radiant und Grad
(Die Einheit rad wird
9b%=(#H)(()0'::)4"F
1m
1rad
360°
1 rad ! 2!
;I*f#! 2B!C@D
2π rad ! 360°
1m
1 rad =
1m !
57.2958°
1m
Umrechnung zwischen
Winkelgeschwindigkeit
und Drehzahl
&
30
!"#""""""$"%""""""%"#""""" $"!
30
&
Winkelgeschwindigkeit
>!"!6<!(!68!"!konstant
[>] = rad/s
!"#
Gleichförmige Bewegung
Winkelgeschwindigkeit #,
Drehzahl n
!"
!t
#,n
Zeit t
$%
$t
$%
30
!"#
&"#""""""""'
($t
Drehzahl
30
n = ;*!(!B!E!6<!(!68!"!konst. &"#""""""""'
(
[n] = 1/min
$%
$t
$%
$t
Konstante Beschleunigung aus dem Stand
Winkelgeschwindigkeit #,
Drehzahl n
!#, !n
!"
!t
Beschleunigung
1!"!6>!(!68!"!konstant
F1G!"!1/s2 = rad/s2
Zeit t
Konstante Beschleunigung aus Grundgeschwindigkeit
Winkelgeschwindigkeit #,
Drehzahl n
Symbol
8A!68
1
6<
>A!6>
>end
#end, nend
!"
#start, nstart
!t
Zeit t
Name
Zeit, Zeitdauer
Winkelbeschleunigung
Drehwinkel
Winkelgeschwindigkeit, (-sänderung)
Winkelgeschw. nach Beschleunigung
SI
s
rad/s2
rad
rad/s
rad/s
!"#$#%#&#!t
!"#$#%#&#!t
30
30
!'#$######&#%#&#!t
(
!'#$######&#%#&#!t
(
2
11
!)#$####&#%#&#!t
2
!)#$####&#%#&#!t
22
11 (
(
!)#$####&######&#!'#&#!t
!)#$####&######&#!'#&#!t
22 30
30
!
"#"!
"$"%"&"'t
!end
"#"!start
"$"%"&"'t
end
start
30
30
=
"$""""""&"%"&"'t
nnend
= nnstart
"$""""""&"%"&"'t
(
(
end
start
11
22
')
"&"'*"$""""&"%"&"'t
') #"!
#"!start
"&"'*"$""""&"%"&"'t
22
start
(
(
11 (
(
')
"&"'*"$""""&""""""&"'n&'t
') #""""""&"+
#""""""&"+
"&"'*"$""""&""""""&"'n&'t
30
30
22 30
start
30 start
Symbol
>start
Name
Winkelgeschw. vor Beschleunigung
Symbol
0A!60
nend
nstart
Name
Drehzahl, (-änderung)
Drehzahl nach Beschleunigung
Drehzahl vor Beschleunigung
SI
rad/s
maxon
min-1
min-1
min-1
Anmerkungen:
– Die eingefärbten Flächen stellen den während des Zeitabschnittes 68 zurückgelegten Drehwinkel 6< dar.
– Drehwinkel 6< = 2!-!B!-#$4Y'90#6)/#W10b%X)#c#;I*f#e#$4Y'90#6)/#W10b%X)
maxon-Formelsammlung
15
N79+
GD6$3I4"+/$*"'#"+P(#'*3/'($,"Q+M"L".0*.36#)%/"
R#)%/
Allgemein
Symmetrisch
Lange Verfahrwege bei
begrenzter Geschwindigkeit
Eignung
vmax
vmax
∆s
Diagramm
∆ta
∆tb
∆ttot
∆s
∆tc
∆ta
∆tb
∆ttot
∆ta
Aufgabe:
Strecke 6. in der Zeit 68tot
zurücklegen
!"
!# %'%!#c
!##$#%& a
2
vmax
amax = !#
a
Strecke 6. bei limitierter
Geschwindigkeit vmax zurücklegen
!# $%$!#
!"
!##&# = v + a 2 c
max
vmax
amax = !#
a
vmax =
vmax =
!&
(!""#"$%$!"a)
amax =
!&
(!""#"$%$!"a) · !"a
!""#" = v!$ %&!"a
max
vmax
amax =
!"a
%&!"a
!""#" = a !$
· !"a
max
Strecke 6. bei limitierter
Beschleunigung amax zurücklegen
vmax = amax · !"a
!%a#&#!%c
Bewegung in der Zeit 68tot mit !"#$
&#!%b · vmax
2
maximaler Geschwindigkeit
vmax
vmax abschliessen
amax#$
!%a
vmax
amax = !%
a
Bewegung in der Zeit 68tot mit
maximaler Beschleunigung
amax abschliessen
vmax = amax · !"a
!"#$#(!%%&%#'#!%a) · vmax
!#$%$&max · (!""'"$($!"a) · !"a
Bewegung mit limitierter
Geschwindigkeit vmax und limitierter Beschleunigung amax
Symbol
amax
vmax
6.
16
Name
Maximale Beschleunigung
Maximale Geschwindigkeit
Weg
SI
m/s2
m/s
m
Symbol
68a
68b
68c
68tot
Name
Zeit a
Zeit b
Zeit c
Gesamtzeit
SI
s
s
s
s
maxon-Formelsammlung
9S9+G#'6"?
Dreieck
Optimiert auf minimale Leistung
(bei gegebenem 6. und 68):
Thermisch meist vorteilhaft
Optimiert auf minimale Beschleunigung/
Maximalkraft (bei gegebenem 6. und 68).
Optimiert für minimalen Zeitbedarf
(bei gegebenem 6. und amax).
vmax
vmax
∆s
∆s
∆ttot
∆ttot
vmax = 1.5 · !$
!""#"
!$
vmax = 2 · !"
"#"
amax = 4.5 · !$2
!" "#"
amax = 4 · !$2
!" "#"
!""#" = 1.5 · v!$
max
v 2max
amax = 2 ·
!$
!""#" = 3 · !$ !"#$%#"· !$
2
amax
amax
!$
!""#" = 2 · v
max
v 2max
amax =
!$
!$
!""#" = 2 · a
max
vmax = % · !$%· amax !"&$'"·" !$%("amax
2
vmax =
!&$% 2 · !""#"$· vmax
3
v
amax$%$3 · max
!""#"
1
!"#$ 2 · !%%&% · vmax
vmax
amax = 2 ·
!%%&%
!"#$ 2 · amax · !t 2tot !"#$&&"· amax !t 2tot
9
vmax = 31 · amax · !t tot !"#$%%"· amax !t tot
1
!$%&%%%%%· amax · !" 2"#"
4
vmax = 1 · amax · !""#"
2
v 2max
!$%&%2 · a
max
vmax
!""#" = 3 · a
max
v 2max
!"#$ a
max
Symbol
amax
vmax
Name
Maximale Beschleunigung
Maximale Geschwindigkeit
maxon-Formelsammlung
!$%· amax
v
!%%&%#$#2 · amax
max
SI Symbol
m/s2 6.
m/s 68tot
Name
Weg
Gesamtzeit
SI
m
s
17
N7T+
GD6$3I4"+#)('($,"+M"L".0*.36#)%/"
R#)%/
Allgemein
Symmetrisch
Lange Rotation bei
begrenzter Drehzahl
Eignung
nmax
nmax
∆!
Diagramm
∆!
∆tb
∆ttot
∆ta
∆tc
∆ta
∆tb
∆ttot
∆ta
Aufgabe:
Winkel 6< in der Zeit 68tot
zurücklegen
Winkel 6< bei limitierter
Drehzahl nmax zurücklegen
!&
!" + !"c
!""#"$% a
2
"'
!max =
"# + "#c
"##$#%& a
(%"#a
2
30 !$ !" + !"
!""#" = % · n + a 2 c
max
# nmax
"max = 30 · !t
a
30
nmax = ' ·
!max =
&
!$ #%#!$
!"#= 30 · n'()#· a 2 c + !$b
$ nmax
!max = 30 · "#
a
!&
30
·
' (!""#"$%$!"a)
"'
("##$#%&%"#a) · "#a
30 !$
!""#" = % · n + !"a
max
$ n
!max = 30 · max
"#a
"##$# =
Winkel 6< bei limitierter
Winkelbeschleunigung 1max
zurücklegen
Bewegung in der Zeit 68tot
mit maximaler Drehzahl nmax
abschliessen
nmax =
"%
+ "#a
!max · "#a
nmax = 30
$ · !max · "#a
(
!"#$##############
·#(!%%&%#'#!%a)
30 · nmax
$ nmax
!max = 30 · "#
a
!"#$#%max#&#(!''('#)#!'a)#&#!'a
Bewegung in der Zeit 68tot mit
maximaler Winkelbeschleunigung 1max abschliessen
nmax = 30
$ · !max · "#a
Bewegung mit limitierter
Drehzahl nmax und limitierter
Winkelbeschleunigung 1max
Symbol
1max
68a
68b
68c
68tot
+A
Name
Maximale Winkelbeschleunigung
Zeit a
Zeit b
Zeit c
Gesamtzeit
SI
rad/s2
s
s
s
s
Symbol
6<
Name
Drehwinkel
SI
rad
Symbol
nmax
Name
Maximale Drehzahl Lastzyklus
maxon
min-1
maxon-Formelsammlung
9S9+G#'6"?
Dreieck
Optimiert auf minimale Leistung
(bei gegebenem 6< und 68):
Thermisch meist vorteilhaft
Optimiert auf minimale Winkelbeschleunigung/
minimales Drehmoment (bei gegebenem
6< und 68) und für minimalen Zeitbedarf
(bei gegebenem 6< und 1max).
nmax
nmax
∆!
∆!
∆ttot
∆ttot
30 !"
nmax = 2 · # · !t
tot
30 !$
nmax = 1.5 · % · !"
"#"
!max = 4.5 ·
"#
"t 2tot
30 !$
!""#" = 1.5 · % · n
max
"#
!max = 4 · "t 2
tot
$2 n2max
·
302 "#
"%
"%
3
· ! !"#$%#"· !
"##$# =
2
max
max
30
1
nmax =
· · !"#· $max !"#$%&"· !"#· $max
2 %
!max = 2 ·
30 !%
!""#"$= 2 · & · n
max
n2max $2
!max = "# · 2
30
"#
"$$%$ = 2 · !
max
30
nmax = % !"#· $max
' · !" · n
!$%& 2 · 30
"#"
max
3
% nmax
!max = 3 · 30 · "#
#$#
!"#= 1 · & · !$$%$#· nmax
2 30
% n
!max = 2 · 30 · "#max
#$#
!"#$ 2 · %max#· !t 2tot#!"#$%%"· %&'(#!t 2tot
9
nmax = 1 · 30 · !max · "##$# !"#$%&"· !max "##$#
3 %
30 !"
nmax = 2 · # · !t
tot
"#
!max = 4 · "t 2
tot
!"#$###1 · %max#· !t 2tot
4
Symbol
1max
68tot
6<
Name
Maximale Winkelbeschleunigung
Gesamtzeit
Drehwinkel
maxon-Formelsammlung
nmax = 12 · 30
! · "max · #$$%$
30 n 2
"#$= % · ! max
max
% nmax
"##$# = 2 · 30 · !
max
SI Symbol
rad/s2 nmax
s
rad
Name
Maximale Drehzahl Lastzyklus
maxon
min-1
19
U)($?"*
3.
3.1
Mechanische Antriebe
Mechanische Umformung
Einteilung
Abgabeleistung/Umformung Allgemein
Translation
Spindel
Abgabeleistung Translation
Zahnstange
FIG!"!J(.!E!'
Pmech!"!9!E!5
Kugelumlaufspindel
Förderband
Umformung Allgemein
Trapezspindel
Kran
Exzenter
Fahrzeug
Kurbelwelle
Rotation
Pmech,L =
Pmech,in
!
vL # FL =
"in # Min
!
8A.'A"/"$3(0*.+-)('($)*
Getriebe
Riemen
Stirnradgetriebe
Zahnriemen
Planetengetriebe
Kettenantrieb
[W] = s-1!E!'J
!
Pmech"#"$"%"&"#"""""""%"'"%"&
30
Umformung Allgemein
Kegelradgetriebe
Spezialdesign
Cyclo-Getriebe
Pmech,L =
Pmech,in
!
Harmonic Drive®
"L # M L =
"in # Min
!
Schneckengetriebe
Wolfromgetriebe
M"?"$I4*0*."*+$*+1"*+V)#<"/*
– Lastseitige Grössen am Abgang werden mit dem Index L gekennzeichnet.
– Eingangsseitige Grössen (meist der Motor) werden mit dem Index in gekennzeichnet.
Symbol
F
FL
M
ML
Min
Pmech
Pmech,in
Pmech,L
v
Name
Kraft (Force)
Lastkraft (Abgang)
Drehmoment
Lastdrehmoment
Drehmoment Eingang
Mechanische Leistung
Mechanische Eingangsleistung
Mechanische Abgabeleistung
Geschwindigkeit
maxon-Formelsammlung
SI
N
N
Nm
Nm
Nm
W
W
W
m/s
Symbol
vL
H!
>
>L
>in
Name
Lastgeschwindigkeit
Wirkungsgrad
Winkelgeschwindigkeit
Winkelgeschwindigkeit Last
Winkelgeschwindigkeit Eingang
Symbol
n
Name
Drehzahl
SI
m/s
rad/s
rad/s
rad/s
maxon
min-1
21
3.2
Umformung mechanische Antriebe Translation
Spindelantrieb
JS
p
Drehzahl
60
nin = p · vL
Drehmoment
Min =
p FL
·
2! "
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!68a)
,
-#in
mL&)&+S p 2
&&&*&&&&&&&&*&&&&&&&&&
M"#$%&'&&&(in&)&(S&)&&&&&&&&&&&&&&&&*&&&&&&
30 -.a
!
4, 2
Spiel,
Positionsfehler
2!
"#in$%$"&L ! p
Bandantrieb/Förderband/Kran
J1
mB
d1
J2
d2
Drehzahl
nin =
60 vL
!
! d1
Drehmoment
Min =
d1 FL
!
2 !
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!68a)
d1
J1
M&%'( = J&% + J1 +
Spiel,
Positionsfehler
Symbol
FL
Jin
JS
JX
J1
J2
Min
M/0A1
dX
d1
d2
mB
22
Name
Lastkraft
Massenträgheitsmoment Eingang
(Motor, Encoder, Bremse)
Massenträgheitsmoment Spindel
Massenträgheitsmoment Umlenkrolle X
Massenträgheitsmoment antriebsseitig
Massenträgheitsmoment Umlenkrolle 2
Drehmoment Eingang
Drehmoment für Beschleunigung
Durchmesser Umlenkrolle X
Durchmesser Antriebsrolle
Durchmesser Umlenkrolle 2
Masse Band
J2 d12 JX d12 mL + mB d12
" #%&%
+
!
!
!
+
!
!
!
30 #$a
! d22 ! dX2
4
!"in#$#!%L ! 2
d1
SI Symbol
N mL
mS
kgm2 p
kgm2 vL
kgm2 6.L
kgm2 68a
kgm2 6<in
Nm K
Nm
m Symbol
m nin
m 60in
kg
Name
Masse Last
Masse Spindel
Spindelsteigung
Lastgeschwindigkeit
Mechanisches Spiel Abgang
Beschleunigungszeit
Mechanisches Spiel Eingang
Wirkungsgrad
Name
Drehzahl Eingang
Drehzahländerung Eingang
SI
kg
kg
m
m/s
m
s
rad
maxon
min-1
min-1
maxon-Formelsammlung
Zahnstange
J P, z
p
mz
Drehzahl
nin =
Drehmoment
Min =
60
!"vL
p !"z
p !"z FL
!
"
2!
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!68a)
Min,! = Jin + JP +
# $&in
mL + mZ p2 !"z2
!
!
!
30 $%a
"
4# 2
Spiel,
Positionsfehler
"#in = "$L !
Drehzahl
nin =
60 vL
!
! d
Drehmoment
Min =
d FL
!
2 !
2!
p !"z
V'4#?"0.
JW
mF
d
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!68a)
Symbol
FL
Jin
JP
JW
Min
M/0A1
d
mF
mL
M&%'( = J&% + JW +
#%&%
"
m L + mF d 2
! 4 ! 30 ! #$
!
a
Spiel,
Positionsfehler
!"in = !sL ! 2
d
Name
Lastkraft
Massenträgheitsmoment Eingang
(Motor, Encoder, Bremse)
Massenträgheitsmoment Ritzel
Massenträgheitsmoment
aller Räder zusammen
Drehmoment Eingang
Drehmoment für Beschleunigung
Durchmesser Antriebsrad
Masse Fahrzeug
Masse Last
maxon-Formelsammlung
SI Symbol
N mZ
p
kgm2 vL
kgm2 z
6.L
kgm2 68a
Nm 6<in
Nm K
m
kg Symbol
kg nin
60in
Name
Masse Zahnstange
Teilung Verzahnung
Lastgeschwindigkeit
Zähnezahl Ritzel
Mechanisches Spiel Abgang
Beschleunigungszeit
Mechanisches Spiel Eingang
Wirkungsgrad
Name
Drehzahl Eingang
Drehzahländerung Eingang
SI
kg
m
m/s
m
s
rad
maxon
min-1
min-1
23
W=?"*("#
e
JE
Sinusförmiger Geschwindigkeitsverlauf der Last
(Annahme: Konstante Motordrehzahl nin)
vL (t) = ! · nin · e · sin ! · nin · t
30
30
Winkelabhängige periodische Beschleunigungskraft für Last,
Kolben und Gestänge (mL)
Fa#$!%#&#'a#(#)*+!#&#,L !
2
" !
!"e !"cos!
30 nin
Winkelabhängige Drehmomente durch unterschiedliche
Lastverhältnisse
Min1!L<M!"!N!-!L5L1!-!./0!<!O!5a1!-!23.<M!
Min2!L<M!"!N!-!L5L2!-!./0!<!O!5a2!-!23.<M!
*!P!<!P!B
B!P!<!P!2B
Mittlere Drehmomentbelastung
Min,RMS =
e
!
2 !"!
FL1 2 + Fa1 2 + FL2 2 + Fa2 2
zusätzliches Drehmoment für Beschleunigung der Exzenterscheibe
(Drehzahländerung 60in während der Dauer!68a)
M%$&'()((*%$(+(*E(((!(
Symbol
FL1
FL2
Fa
Fa L<M
Fa1
Fa2
Jin
JE
Min,RMS
M/0A1
Min1L<M
24
Name
Lastkraft 1. Halbtakt
Lastkraft 2. Halbtakt
Beschleunigungskraft
Winkelabhängige periodische
Beschleunigungskraft
Beschleunigungskraft 1. Halbtakt
Beschleunigungskraft 2. Halbtakt
Massenträgheitsmoment Eingang
(Motor, Encoder, Bremse)
Massenträgheitsmoment
Exzenterscheibe
Effektivwert Drehmoment (RMS)
Drehmoment für Beschleunigung
Drehmoment 1. Halbtakt
! "$%$
!
30 "#a
SI
N
N
N
Symbol
Min2L<M
e
mL
vL(t)
N
N t
N 68a
<
kgm2 K
kgm2 Symbol
Nm nin
Nm 60in
Nm
Name
Drehmoment 2. Halbtakt
Exzentrizität
Masse Last
Sinusförmiger Geschwindigkeitsverlauf Last
Zeit
Beschleunigungszeit
Drehwinkel
Wirkungsgrad
Name
Drehzahl Eingang
Drehzahländerung Eingang
SI
Nm
m
kg
m/s
s
s
rad
maxon
min-1
min-1
maxon-Formelsammlung
979+
X<@)#<0*.+<"I4'*$3I4"+8*(#$"A"+-)('($)*
Getriebe
iG
Drehzahl
nin = nL · iG
Drehmoment
Min =
J1
J2
ML
iG · !
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!68a)
M$#&'= J$#+ J1+
JL
JL + J2
% !#$#
% !#
·
· · $#
·
30 !"a = J$#)+ JG + iG2 · ( 30 !"a
iG2 · (
Spiel, Positionsfehler 6<in!"!6<L!E!/G
z 1+ z 3
z1
Untersetzung
Planetengetriebe
iG =
Drehzahl
nin = nL ·
Drehmoment
Min =
-$"<"*'*(#$"A
mR
d1
J1
J2
d2
d2
d1
d1 ML
·
d2 !
zusätzliches Drehmoment für konstante Beschleunigung
(Drehzahländerung 60in während der Dauer!681)
2
M!"#$ = Jin + J1 +
Spiel,
Positionsfehler
Symbol
JG
Jin
JL
JX
J1
J2
Min
M/0A1
ML
d1
d2
dX
Name
Massenträgheitsmoment
Getriebe transformiert
Massenträgheitsmoment Eingang
(Motor, Encoder, Bremse)
Massenträgheitsmoment Last
Massenträgheitsmoment Umlenkrolle X
Massenträgheitsmoment antriebsseitig
Massenträgheitsmoment abgangsseitig
Drehmoment Eingang
Drehmoment für Beschleunigung
Lastdrehmoment
Durchmesser Antriebsrolle
Durchmesser Lastrolle
Durchmesser Umlenkrolle X
maxon-Formelsammlung
2
2
Jx d1
m · d1
JL + J2 d1
· 2 + 4R · %
· 2+
%
% dx
d2
&
'n
· 30 · 't in
a
!"in = !" L · d 2
d1
SI Symbol
iG
kgm2 mR
z1
kgm2 z3
kgm2 68a
kgm2 6<in
kgm2 6<L
kgm2 K
Nm
Nm Symbol
Nm nin
m nL
m 60in
m
Name
Untersetzung Getriebe (Katalogwert)
Masse Riemen
Zähnezahl Sonnenrad
Zähnezahl Hohlrad
Beschleunigungszeit
Mechanisches Spiel Eingang
Mechanisches Spiel Abgang
Wirkungsgrad
Name
Drehzahl Eingang
Lastdrehzahl
Drehzahländerung Eingang
SI
kg
s
rad
rad
maxon
min-1
min-1
min-1
25
3.4
maxon-Getriebe
M"?"$I4*0*.+1"#+<'=)*>Y"(#$"A"
Getriebe-Bauart
GS
GP
KD
Stirnradgetriebe
Planetengetriebe
Koaxdrive
GP
22
A
Ausführung
Durchmesser
in mm
A
B
C
HD
HP
K
L
M
S
V
Z
Metallversion
Version mit überdickem Hohlrad
Keramikversion
Heavy Duty – für Anwendungen in Öl
High Power Version
Kunststoffversion
kostenoptimierte Version
sterilisierbare Version für Medizintechnik
Spindelgetriebe mit Axiallagerung
verstärkte Version
spielarme Version
Betriebsbereiche Getriebe
1'234OS)?/<)L)#:<46#'%X#)<4)#K)L)4:6'%)/#E34#1<46):?)4:#+***#8?%46)4#L)<#1'2<1'0)1#M'%)/O
drehmoment und maximaler Eingangsdrehzahl ausgelegt. Werden diese Grenzwerte nicht erreicht,
kann sich die Lebensdauer um ein Mehrfaches erhöhen. Kommt es zu einer Überschreitung
dieser Grenzen, so ist eine progressiv abnehmende Lebensdauer zu erwarten.
Lastdrehzahl nL
max. Lastdrehzahl
(durch Getriebe-Eingangsdrehzahl bestimmt)
nmax,L
nmax,L =
nmax,in
iG
nmax,in
nmax,L
Dauerbetrieb
Kurzzeitbetrieb
Lastdrehmoment ML
MG,cont
Symbol
MG,cont
MG,max
iG
26
Name
Max. Dauerdrehmoment Getriebe
(Katalogwert)
Kurzzeitig zul. Drehmoment Getriebe
(Katalogwert)
Untersetzung Getriebe (Katalogwert)
MG,max
SI Symbol
nmax,in
Nm nmax,L
Name
Maximale Drehzahl Eingang
Maximale Drehzahl Abgang
maxon
min-1
min-1
Nm
maxon-Formelsammlung
4.
T7F+
Lagerung
W$."*3I4'@("*+,)*+2$*("#./"$(/'."#*+0*1+50."//'."#*+$<+!"#./"$I4
Sintergleitlager
Kugellager
r
Betriebsarten
– Dauerbetrieb
Z#"4?'4/>
bereich
– für alle Betriebsarten geeignet
– speziell auch für Start-Stopp-Betrieb und
Anwendungen mit kleinen Drehzahlen
– L<:#5'"#+*#***#1<4-1
– <4#8C)Y<'0Xb00)4#L<:#+**#***#1<4-1 und
höher
– <6)'0#'L#5'"#R**#1<4-1 (Bereich der
hydrodynamischen Schmierung)
– mit speziellen Materialpaarungen
und Schmierungen auch bei tieferen
Drehzahlen
radiale /
– nur kleine Lagerbelastungen
– höhere Belastungen
axiale
– vorgespannte Kugellager:
Belastung
axiale Belastung bis zum Wert der
Vorspannung
weitere
– ?7C<:59#<4#MNOP3?3/)4#'L#+*#11#
– typisch in kleinen DC-Motoren
W$*3'(?Durchmesser und in Planetengetrieben
# L<:#5'"#;*#11#M%/591)::)/#%46#<4#
kriterien
– vorgespannte Kugellager haben eine
Stirnradgetrieben
sehr hohe Lebensdauer und einen
– ungeeignet für umlaufende Last
– nicht geeignet für Vakuumanwenruhigen Lauf:
dungen (ausgasen)
typisch in bürstenlosen DC-Motoren
– ungeeignet für tiefe Temperaturen
# Dg#O!*fNF
Lagerspiel – '2<'0`#?7C<:59#*"*R#"""#*"+R#11
– '2<'0`#?7C<:59#*"*R#h#*"+R#11#
– /'6<'0`#?7C<:59#*"*+J#11
(kein Axialspiel bei Vorspannung)
– /'6<'0`#?7C<:59#*"*!R#11
-"$AL"#(" – *"**+#h#*"*+#
– *"**+#h#*"+
(hydrodynamische Schmierung)
Schmierung
– hydrodynamische Schmierung erst
bei hohen Drehzahlen
– Materialpaarung Welle – Lagerkörper
wichtig, Porengrösse des Sinterlagers
und Viskosität des Schmiermittels bei
Einsatztemperatur sind kritisch
– Speziell: Sinter-Eisenlager mit Keramikwelle für hohe Radiallasten und
hohe Lebensdauer
– Temperaturbereich der Standard# :591<)/%4(`#?7C<:59#O!*#h#+**#fN
– Spezialschmierung möglich für sehr
hohe oder sehr tiefe Einsatztemperaturen
– Abdichtung möglich (aber höhere
Reibung, tiefere Lebensdauer und
tiefere Grenzdrehzahl)
Kosten
kostengünstig
teurer
maxon-Formelsammlung
27
U)($?"*
5.
5.1
Elektrotechnik
Grundlagen Gleichspannung
Elektrische Leistung
Leistung:
P = U · I = R · I2 =
Einheit:
[P] = V · A =VA
= W = J/s
U2
R
Verlustleistung:
PV = R · I2
Leistungsanpassung
P/Pmax
Bei RL = Ri#H</6#6<)#1'2<1'0)#K)<:?%4(#'%:#)<4)/#8C'44%4(:Q%)00)#)4?4311)4"
1.0
Lineare Quelle
0.8
I
a
I
Ri
U0
0.6
Verbraucher
Ukl
RL
0.4
b
0.2
0.0
0.01
0.1
1
10
100
RL/Ri
U2
I2 · R
Pmax = 4 · 0R = 4 i
i
[4<3I4"3+Y"3"(?
U=R·I
U
I=
R
U
R= I
I
+
A
V
U
R
_
Symbol
I
P
Pmax
PV
R#
Name
Strom
Leistung
Maximale Leistung
Verlustleistung
]0)>?/<:59)/#V<6)/:?'46#
maxon-Formelsammlung
SI
A
W
W
W
i
Symbol
Ri#
R L#
U
U 0#
U kl
Name
j44)4H<6)/:?'46#8C'44%4(:Q%)00)#
K':?H<6)/:?'46#
Spannung
W/:C'44%4(#8C'44%4(:Q%)00)#
Klemmenspannung
SI
i
i
V
.
V
29
Elektrische Zeitkonstante
100
%
63%
Uout 60
U 40
in
20
0
!el
0
2!el
t
3!el
4!el 5!el
Die elektrische Zeitkonstante Stromänderung über
beschreibt die Reaktionszeit induktiver Last
des Stroms beim Ein- und
!el = L
R
Ausschalten einer Spannung.
Spannungsänderung über
FQelG!"!R!·!5!"!R!· As / V = s kapazitiver Last
FQelG!"!S!(!R!"!T.!(!U!(!R!"!. !el = R · C
Pull-up / Pull-down
Pull-up: (relativ hochohmiger) Widerstand
– verbindet Signalleitung mit dem höheren
Spannungs-Potenzial
– bringt die Leitung auf das höhere Potenzial, falls keine
extern anliegende Spannung die Leitung aktiv auf ein
niedrigeres Potenzial bringt
+V
Ru
Pull-up
Logik
Pull-down: (relativ hochohmiger) Widerstand
– verbindet Signalleitung mit dem niedrigeren
Spannungs-Potenzial
– bringt die Leitung auf das niedrigere Potenzial, falls
keine extern anliegende Spannung die Leitung aktiv
auf ein höheres Potenzial bringt
Logik
Rd
Pull-down
[6"*>C)//"I()#>803.'*.
+V
Ru
Iout
Open
Collector
Ausgang
[6"*>C)//"I()#>803.'*.+P[CQ:
(DE: «offener Kollektor» auch «unbeschalteter Kollektor»)
– Ausgang einer integrierten Schaltung mit einem
Bipolar-Transistor mit freiem Kollektor-Ausgang.
– Meist werden die Ausgänge zusammen mit einem
Pull-up-Widerstand verwendet, der im inaktiven
Zustand den Ausgang auf ein höheres Potenzial hebt.
Collector
Logik
Basis
Uout
Emitter
Symbol
C
Iout
L
R#
Rd#
R u#
;*
Name
Kapazität
Ausgangsstrom
Induktivität
]0)>?/<:59)/#V<6)/:?'46#
U%00O63H4#V<6)/:?'46#
U%00O%C#V<6)/:?'46#
Uout!"!OT!V!(Iout · Ru)
Hall-Sensoren haben meist einen Open-CollectorAusgang ohne Pull-Up Widerstand. Dieser ist daher in
den maxon-Steuerungen integriert.
SI
F
A
H
i
i
i
Symbol
t
Uin
Uout
+V
Qel
Name
Zeit
Eingangsspannung
Ausgangsspannung
Speisespannung
Elektrische Zeitkonstante
SI
s
V
V
V
s
maxon-Formelsammlung
5.2
Elektrische Widerstandsschaltungen
-"$4"*3I4'/(0*.+,)*+\$1"#3(H*1"*
I
+
U = U1 + U2 +...
R1
U1
I = konstant
R = R1 + R2 + ...
U1
U
R2
U2
U2
=
R1
R2
–
R'#'//"/3I4'/(0*.+,)*+\$1"#3(H*1"*
I = I1 + I2 +...
I
+
I1
U
R1
1 1
1
= + + ...
R R1 R 2
I2
U = konstant
R2
R1 · R2
R1 + R2
I1 R2
=
I2 R1
–
Symbol
I
I1, I2
R#
R=
Name
Gesamtstrom
Teilströme
]/:'?YH<6)/:?'46#
maxon-Formelsammlung
SI
A
A
i
Symbol
R1, R2#
U
U1, U2
Name
B)<0H<6)/:?b46)#
Gesamtspannung
Teilspannungen
SI
i
V
V
31
Spannungsteiler unbelastet
R2
I
+
U2 = U
R1
U1
R1 + R2
U1 R1
=
U2 R2
U
R2
U2
I=
–
U2
U
=
R1 + R2
R2
Spannungsteiler belastet
+
+
I
I
+
R1 R1
R1 R1
IL
U
IL
U
IR2 IR2
UL UL
R2 R2
–
RL RL
–
Rx Rx
–
–
Rx
Rx + R1
RL · R2
UL = U
+
Rx =
RL + R2
R2
IL = I ·
RL + R2
RL
IR2 = I ·
RL + R2
Potentiometer
+
A
U
1
x
0
A: Anfang
S: Schleifer
E: Ende
R0
R=
unbelastet
S
UL
RL
belastet
–
x · R0 · RL
(x · R0) + RL
UL = U
UL = U
E
R
R + (1 – x) · R0
x
R0
(x – x2) +1
RL
Wicklungswiderstand
RT = Rmot · (1 O!1Cu!-!6W )
Temperaturabhängigkeit
Symbol
I
IL
IR2
R#
R *#
R1, R2#
R L#
Rmot#
Rx
32
Name
Gesamtstrom
Laststrom
Strom durch Widerstand R2
]/:'?YH<6)/:?'46#
V<6)/:?'46#U3?)4?<31)?)/#
B)<0H<6)/:?b46)#
K':?H<6)/:?'46#
$4:590%::H<6)/:?'46#P3?3/#Dd'?'03(H)/?F#
Ersatzwiderstand von R2 und RL#
SI
A
A
A
i
i
i
i
i
i
Symbol
RT
U
U1, U2
UL
6W
x#
Name
Widerstand bei Temperatur T#
Gesamtspannung
Teilspannungen
Lastspannung
Temperaturdifferenz
8?)00%4(#U3?)4?<31)?)/#
Symbol
1Cu#
Name
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
SI
i
V
V
V
K
*"""+
Wert
*"**;k#d-1
maxon-Formelsammlung
5.3
Grundlagen Wechselspannung
Wechselgrössen
T
[f] = 1 / s = Hz
F>G!"!1 / s =
rad / s
t
1
f= T
>!"!2B!E!X
[4<3I4"3+Y"3"(?
I
~
U(t)!"!Y!E!Z(t)
U(t)
I(t) = Z
U(t)
Z = I(t)
A
V
U
Z
~
Widerstände
Blindwiderstand
XL
XL
~
~
~
~
XC
XC
Induktiv
(Reaktanz)
XL!"!>!E![!"!2B!E!X!E![
Kapazitiv
1 =
1
XC = !"#"$
2%"#"&"#"$
]<6"1'*?+P\"I43"/3(#)<L$1"#3('*1Q+
Für Reihenschaltung von R und L,
bzw. R und C
Symbol
C
I
L
R#
T
U
Name
Kapazität
Strom
Induktivität
]0)>?/<:59)/#V<6)/:?'46#
Periodendauer
Spannung
maxon-Formelsammlung
Z = R2 + X 2
SI
F
A
H
i
s
V
Symbol
X
XC#
X L#
Z#
f#
t
>#
Name
Steht für XC oder X L#
G0<46H<6)/:?'46#>'C'Y<?<E#
G0<46H<6)/:?'46#<46%>?<E#D@)'>?'4YF#
j1C)6'4Y#
_/)Q%)4Y#
Zeit
d/)<:X/)Q%)4Y#
SI
i
i
i
i
[Y
s
/'6l:
33
5.4
Einfache Filter
Allgemein
1
f = R
2! · R · C bzw. C 2! · L
S/)4YX/)Q%)4Y fC
fC =
Phasenverschiebung
!"#$%&
Uout
Uin
Tiefpass Filter, Integrierglied
K'::)4#_/)Q%)4Y)4#%4?)/9'0L#<9/)/#S/)4YX/)Q%)4Y#fC annährend ungeschwächt passieren.
[T9)/)#_/)Q%)4Y)4#H)/6)4#()6b1CX?"
Anwendungen: maxon-Regler-Eingänge, Messung Kommutierungssignale von maxon-Motoren.
R
0.707
0.5
Uin
C
! Uout
Uout
Uin
Uout 0.2
Uin 0.1
Uin
R
Uout
I
1 + ( f / fC )2
Uout = Uin
45°
UL
!
1
f = fC
90°
L
Uin
Uout
=
Uin
1.0
UR
I
!
0°
0.1 0.2 0.5
Uout
1
2
5
10
Uout = Uin
f/fC
Xc
R + Xc2
2
R
R + XL2
2
E)I46'33+V$/("#^+Z$@@"#"*?$"#./$"1
K'::)4#_/)Q%)4Y)4#3L)/9'0L#<9/)/#S/)4YX/)Q%)4Y#fC annährend ungeschwächt passieren.
B<)X)/)#_/)Q%)4Y)4#H)/6)4#()6b1CX?"
C
Uin
R
UC
Uin
Uout
0.2
Uin
0.1
Uin
L
34
!
Uout = Uin
45°
Uout
Uout
I
Symbol
C
I
L
R#
Uin
Uout
UR
f = fC
90°
R
Uin
0.707
0.5
Uout
Uout
1
=
Uin
1 + ( fC / f )2
1.0
Uout
I
!
UR
Name
Kapazität
Strom
Induktivität
]0)>?/<:59)/#V<6)/:?'46#
Eingangsspannung
Ausgangsspannung
Spannung über Widerstand
!
0°
0.1 0.2 0.5
f/fC
SI
F
A
H
i
V
V
V
Symbol
UC
UL
f#
fC#
<
XC#
XL#
1
2
5
10
Uout = Uin
R
R + XC2
2
XL
R2 + XL2
Name
Spannung über Kapazität
Spannung über Induktivität
_/)Q%)4Y#
S/)4YX/)Q%)4Y#
Phasenverschiebungswinkel
G0<46H<6)/:?'46#>'C'Y<?<E#
G0<46H<6)/:?'46#<46%>?<E#D@)'>?'4YF#
SI
V
V
[Y
[Y
°
i#
i
maxon-Formelsammlung
6.
6.1
maxon-Motoren
Allgemeines
Z'3+26"?$"//"+'*+<'=)*>B)()#"*
Das+E"#?3(KI& des maxon-Motors ist die selbsttragende eisenlose Kupferwicklung.
Herausragende Eigenschaften der maxon DC-Motoren:
– [39)/#V</>%4(:(/'6#m#()/<4()/#]4)/(<)E)/L/'%59
– 8)9/#>0)<4):#P'::)4?/b(9)<?:131)4?#m#
höchste Beschleunigung
– d0)<4)#j46%>?<E<?b?#m#939)#K)L)4:6'%)/
– K<4)'/)#d)440<4<)4#m#(%?)#@)()0L'/>)<?
– d31C'>?)#G'%X3/1#m#(%?):#.30%1)4lK)<:?%4(:E)/9b0?4<:
– Kein magnetisches Rastmoment
– Geringe elektromagnetische Störungen
– Hohe Zuverlässigkeit
<'=)*+ZC+<)()#+(Bürstenbehaftete permanentmagneterregte Gleichstrommotoren)
-W+R#).#'<<
– Hohe Leistungsdichte
– Hochwertiger DC-Motor mit NdFeB-Magnet
– Hohe Drehzahlen und Drehmomente
– @3L%:?):#M):<(4#DP)?'00&'4:59F
!6 - 65 mm
A-max Programm
– Gutes Preis-Leistungsverhältnis
– DC-Motor mit AlNiCo-Magnet
– Automatisierter Herstellprozess
!12 - 32 mm
-W><'=+R#).#'<<
– High-Performance zu niedrigen Kosten
– Kombiniert rationelle Fertigung und Konstruktion der A-max-Motoren mit der höheren
Leistungsdichte der NdFeB-Magnete
– Automatisierter Herstellprozess
!13 - 29 mm
Eigenschaften der beiden Bürstensysteme
Graphitbürsten
– Geeignet für hohe Ströme
und Stromspitzen
– Geeignet für Start-Stoppund Reversierbetrieb
– S/T::)/)#P3?3/)4#D'L#5'"#+*#VF
–
–
–
–
–
Höhere Reibung, höherer Leerlaufstrom
Ungeeignet für kleine Ströme
Mehr Geräusch
Höhere elektromagnetische Emissionen
Aufwändiger, teurer
maxon-Formelsammlung
Edelmetallbürsten
– Geeignet für kleinste
Ströme und Spannungen
– Geeignet für Dauerbetrieb
– Kleinere Motoren
– Kleinere Reibung, weniger Geräusch
– Tiefe elektromagnetische Emissionen
– Günstiger Preis
– Ungeeignet für grosse Ströme und
Stromspitzen
– Ungeeignet für Start-Stopp-Betrieb
35
<'=)*+WC+<)()#
Bürstenlose DC-Motoren (BLDC-Motoren)
– Motorverhalten wie bürstenbehafteter DC-Motor
– Aufbau ähnlich zu Synchronmotor (3-phasige Statorwicklung, rotierender Permanentmagnet)
– Bestromung der 3 Phasen abhängig von der Rotorposition mittels Kommutierungselektronik
<'=)*+WC>R#).#'<<
– Leistungsoptimiert, mit hohen Drehzahlen
# L<:#+**#***#1<4-1
– Robustes Design
– Diverse Varianten:
z.B. kurz – lang, sterilisierbar
– Geringste Restunwucht
!6 - 60 mm
WC><'=+R#).#'<<
– Attraktives Preis/Leistungsverhältnis
– Robustes Stahlgehäuse
– M/)9Y'90)4#L<:#!*#***#1<4-1
– Rotor mit einem Polpaar
!16 - 40 mm
WC>T6)/"+R#).#'<<
– Höchste Leistungsdichte dank 4-poligem Rotor
– Gestrickte Wicklung, System maxon® mit
optimierter Verschaltung der Teilwicklungen
– M/)9Y'90)4#L<:#!R#***#1<4-1
– Hochwertiges Rückschlussmaterial zur
Reduktion der Wirbelstromverluste
– Mechanische Zeitkonstante unter drei
Millisekunden
!22 - 45 mm
<'=)*+WC>V/'I4<)()#
– Attraktives Preis/Leistungsverhältnis
– Hohe Drehmomente dank aussen liegendem,
mehrpoligem Rotor
– Sehr gute Wärmedissipation bei höheren
Drehzahlen dank offener Bauform
– M/)9Y'90)4#L<:#!*#***#1<4-1
!10 - 90 mm
<'=)*+WC>$+R#).#'<<
– Höchste Dynamik dank innen liegendem,
mehrpoligem Rotor
– Mechanische Zeitkonstante unter
drei Millisekunden
– M/)9Y'90)4#L<:#+R#***#1<4-1
!40 mm
36
maxon-Formelsammlung
Elektronische Kommutierung
Kommutierungstyp
-)()#/'."A"3($<<0*.
Blockkommutierung
mit Hall-Sensoren
Sensorlos
Signalverlauf der Hall-Sensoren (HS)
EMK
!
0° 60 120 180 240 300 360
blockförmige Phasenströme
1
0
1
HS 2
0
1
HS 3
0
HS 1
"
0°
0° 60° 120°180° 240°300° 360°
Drehwinkel
EMK
"
60° 120° 180° 240° 300° 360°
#
#
Motorspannung (Phase-Phase)
+
U 1-2
+
Legende
! Sternpunkt
" Zeitverzögerung 30°
# Nulldurchlauf EMK
U 2-3
+
U3-1
Sinuskommutierung
mit Encoder und Hall-Sensoren (HS)
sinusförmige Phasenströme
0°
60° 120° 180° 240° 300° 360°
Drehwinkel
ZC>+0*1+WC>B)()#"*+$<+!"#./"$I4
ZC>B)()#+PAK#3("*A"4'@("(Q
– Einfacher Betrieb und Ansteuerung,
auch ohne Elektronik
– Keine elektronischen Teile im Motor
– Lebensdauer durch Bürstensystem
beschränkt
– Drehzahlen durch Bürstensystem begrenzt
maxon-Formelsammlung
EC-Motor mit HS
Encoder
WC>B)()#+PAK#3("*/)3Q
– Hohe Lebensdauer, hohe Drehzahlen mit
vorgespannten Kugellagern
– Kein Bürstenfeuer
– Eisenverluste im Rückschluss
– Braucht Elektronik für Betrieb
(mehr Kabel und höhere Kosten)
– Elektronische Teile im Motor (Hall-Sensoren)
37
_7N+
O"$3(0*.3A"(#'I4(0*.+$<+ZC>B)()#+8//."<"$*
Motor als Energiewandler
PJ= Rmot!"!#mot2
Pel= Umot!"!#mot
PL =
Pel = PL + PJ
Leistungsgleichgewicht Motor
Leistung P
Drehzahl n
PL
Umot · Imot = ! · n · M + Rmot · Imot2
30
Umot > UN
Umot = UN
PL
n0
MH Drehmoment M
Symbol
Imot
M
MH
P
Pel
PJ
PL
;A
$
n·M
30
Name
Motorstrom
Drehmoment
Anhalte(dreh)moment
Leistung
Elektrische Eingangsleistung
Joule’sche Verlustleistung
Mechanische Abgabeleistung
SI
A
Nm
Nm
W
W
W
W
Im Drehmoment-Drehzahl-Diagramm
entspricht die Abgabeleistung der
Fläche des Rechtecks unter der DrehzahlKennlinie, welches beim halben
Anhaltemoment und bei der halben
Leerlaufdrehzahl am Grössten ist.
Die Leistungskurve hat den Verlauf
einer Parabel, deren Maximalwert
Q%'6/'?<:59#E34#6)/#P3?3/:C'44%4(#
abhängt.
Symbol
Rmot#
Umot
UN
Name
$4:590%::H<6)/:?'46#P3?3/#Dd'?'03(H)/?F#
Motorspannung
Nennspannung Motor (Katalogwert)
Symbol
n
n*
Name
Drehzahl
Leerlaufdrehzahl
SI
i
V
V
maxon
min-1
min-1
maxon-Formelsammlung
6.3
Motorkonstanten und -kennlinien
Motorkonstanten
Die Z#"4?'4/&)*3('*("+kn und die Drehmomentkonstante kM sind zwei wichtige Kennzahlen
der Energieumwandlung.
Z#"4?'4/&)*3('*("+kn
Die Drehzahlkonstante kn verbindet die Drehzahl n mit
der in der Wicklung induzierten Spannung Uind (=EMK).
Drehmomentkonstante kM
Die Drehmomentkonstante k M verknüpft das erzeugte
Drehmoment M mit dem elektrischen Strom I.
n = kn!E!\ind
M = kM!E!Zmot
Info: maxon-Einheit mNm/A
kn · kM =
8A4H*.$.&"$(+?L$3I4"*+kn und kM
(maxon-Einheiten)
[
30 000 min-1 mNm
·
A
!
V
=1
]
rad Nm
·
s·V
A
Z#"4?'4/>Z#"4<)<"*(>5"**/$*$"
G):59/)<L?#P3?3/E)/9'0?)4#n#6"9"#1T(0<59)#$/L)<?:C%4>?)
D4-#PF#n#L)<#>34:?'4?)/#8C'44%4(#Umot
n*!+!)n!E!\mot
MH = kM!E!ZA
Drehzahl n
MR = kM!E!Z*
U
mo
t
>U
!#
#$%$&#$'$(mot$)$$$$$$$$$$'$"
!"
(maxon-Einheiten)
N
n0
U
∆n
mo
t
=U
Kennliniensteigung
N
∆M
MR
MH
Drehmoment M
I0
IA
Motorstrom Imot
Symbol
Imot
IA
I*
kM
M
MH
MR
Rmot#
Uind
Name
SI
Motorstrom
A
Anlaufstrom
A
Leerlaufstrom
A
Drehmomentkonstante (Katalogwert) Nm/A
Drehmoment
Nm
Anhalte(dreh)moment
Nm
Reib(dreh)moment
Nm
$4:590%::H<6)/:?'46#P3?3/#Dd'?'03(H)/?F# i
Induzierte Spannung
V
maxon-Formelsammlung
30 000 Rmot
n0
!n
=
· 2 #
!M
kM
MH
"
(maxon-Einheiten)
Symbol
Umot
UN
Name
Motorspannung
Nennspannung Motor (Katalogwert)
Symbol
kn
n
n*
60(6=
Name
Drehzahlkonstante (Katalogwert)
Drehzahl
Leerlaufdrehzahl
Kennliniensteigung Motor
(Katalogwert)
SI
V
V
maxon
min-1/V
min-1
min-1
min-1/mNm
39
Spannungsgleichung Motor
+
Imot
U$%" = L$%" ·
Lmot
Umot
R$%" · I$%" + U#&'(
Daraus abgeleitet die Drehzahl in Abhängigkeit der Belastung (Drehzahl-DrehmomentKennlinie)
Rmot
EMK
!#
+ R$%" · I$%" + U#&'
!"
!#
#$%$&#$'$(mot$) !# '$"$%$#0$)$$$$$$$$$$'$"
!"
!"
Uind
(maxon-Einheiten)
–
\$#&0*.3.#'1,"#/'0@+@PBQ
Wirkungsgrad !
Drehzahl n
!max
"#$
n0
Umot = UN
!
'#%#((#)#(*#)
·
(mit#(R#$#+M#%#&0)
Umot#%#&mot
30 000
!max = 1 –
I0
IA
2
MH
Drehmoment M
Symbol
EMK
Imot
IA
I*
kM
Lmot
M
MH
MR
Rmot#
Uind
Umot
J*
Name
SI
Elektromotorische Kraft
V
Motorstrom
A
Anlaufstrom
A
Leerlaufstrom
A
Drehmomentkonstante (Katalogwert) Nm/A
Anschlussinduktivität Motor
(Katalogwert)
H
Drehmoment
Nm
Anhalte(dreh)moment
Nm
Reib(dreh)moment
Nm
$4:590%::H<6)/:?'46#P3?3/#Dd'?'03(H)/?F# i
Induzierte Spannung
V
Motorspannung
V
Symbol
UN
]/
]8
K
Kmax
Name
Nennspannung Motor (Katalogwert)
Stromänderung
Zeitänderung
Wirkungsgrad
Maximaler Wirkungsgrad bei UN
(Katalogwert)
SI
V
A
s
Symbol
kn
n
n*
60(6=
Name
maxon
Drehzahlkonstante (Katalogwert)
min-1/V
Drehzahl
min-1
Leerlaufdrehzahl
min-1
Kennliniensteigung Motor
(Katalogwert)
min-1/mNm
maxon-Formelsammlung
6.4
Beschleunigung
Winkel-Beschleunigung: Anlauf bei konstantem Strom
n0
Drehzahl n
ML, nL
Beschleunigung
M
k "!"I
!"#
# M mot
JR"$"%L
JR"$"%L
lmot = konstant
MH
Drehmoment M
n0
nL
Drehzahl n
Hochlaufzeit bis Lastdrehzahl
J #)#*L
J #)#*
%
%
!"!&"! R
!"#$
!"!&"! R M L $
kM#!"I'("
30
30
!t
Zeit t
Winkel-Beschleunigung: Anlauf bei konstanter Klemmenspannung
n0
Drehzahl n
ML, nL
Beschleunigung maximal
MH
!max =
JR + JL
Umot = konstant
MH
Drehmoment M
n0
nL
Drehzahl n
"m
Symbol
Imot
JL
JR
kM
M
MH
ML
MR
Rmot
#
t
Umot
!t
Zeit t
Name
Motorstrom
Massenträgheitsmoment Last
Massenträgheitsmoment Rotor
(Katalogwert)
Drehmomentkonstante (Katalogwert)
Drehmoment
Anhalte(dreh)moment
Lastdrehmoment
Reib(dreh)moment
Anschlusswiderstand Motor
Dd'?'03(H)/?F#
Zeit
Motorspannung
maxon-Formelsammlung
Hochlaufzeit bis Lastdrehzahl
M + MR
· n0
1– L
MH
'
!"#$#%m · ln
M + MR
1– L
· n0 – nL
MH
mech. Zeitkonstante mit Lastträgheit
(J + JL) · Rmot
!m' = R
k M2
SI Symbol
A 1
kgm2 1max
68
kgm2 Q m
Nm/A
Nm Q m^
Nm
Nm
Nm Symbol
n
i n*
s nL
V 60
Name
Winkelbeschleunigung
Maximale Winkelbeschleunigung
Hochlaufzeit
Mechanische Zeitkonstante
(Katalogwert)
Mechanische Zeitkonstante
mit zusätzlichem J L
Name
Drehzahl
Leerlaufdrehzahl
Lastdrehzahl
Drehzahländerung
SI
rad/s2
rad/s2
s
s
s
maxon
min-1
min-1
min-1
min-1
41
6.5
Motorauswahl
Auswahl Motortyp
Auswahl Motortyp
anhand der geforderten Drehmomente
M N > MRMS
MH > Mmax
Drehzahl n
Grenzdrehzahl
Dauerbetrieb
Kurzzeitbetrieb
MRMS MN
Mmax
MH
Mittlere effektive Belastung (RMS)
Drehmoment M
MRMS =
1
(t · M12 + t2 · M22 + ... + tn · Mn2)
ttot 1
Bemerkung:
]<4# P3?3/?7C# DY"G"# @];*F# <:?# :C)Y<=Y<)/?# 6%/59`# :)<4)# G'%(/T::)-# 6<)# 1)59'4<:59)# $L('L)O
leistung, die Lagerung der Welle, das verwendete Kommutierungssystem und die Kombinationsmöglichkeiten mit Getrieben und Sensoren (maxon-Baukasten)
Auswahl Wicklung
Für eine optimale Abstimmung zwischen den elektrischen und mechanischen Leistungskomponenten des Motors.
k n#:C)Y<=Y<)/?#V<5>0%4(`
Wähle Wicklung mit
Drehzahl n
n0,theor
$&
nmax +
'!%max
n0,theor
$%
=
kn!"!#n,theor =
Umot
Umot
Kennlinie hoch
genug für alle
Arbeitspunkte
nmax
(maxon-Einheiten)
Regelreserve
~ 20%
bremsen
beschleunigen
Mmax
Drehmoment M
wobei nmax , Mmax extremer Arbeitspunkt und
60(6= die mittlere Kennliniensteigung des
gewählten Motortyps ist.
Empfehlung: Dem kn#)<4)#@)()0/):)/E)#E34#5'"#!*^#9<4Y%XZ()4#Y%1#$%:(0)<59#E34#B30)/'4Y)4#
und möglichen Lastveränderungen; kn aber nicht zu gross wählen, da sonst die Ströme gross werden.
M
Imot = I0 + kmax
M
Benötigter maximaler Motorstrom
Symbol
Imot
I*
kM
M
Mmax
MH
MN
MRMS
M1...n
ttot
42
Name
Motorstrom
Leerlaufstrom
Drehmomentkonstante (Katalogwert)
Drehmoment
Maximales Drehmoment Lastzyklus
Anhalte(dreh)moment
Nennmoment Motor (Katalogwert)
Effektivwert Drehmoment (RMS)
Drehmoment Betriebspunkte 1...n
Gesamtzeit Betriebszyklus
SI
A
A
Nm/A
Nm
Nm
Nm
Nm
Nm
Nm
s
Symbol
t1…n
Umot
Name
Zeitdauer Betriebspunkte 1...n
Motorspannung
SI
s
V
Symbol
kn
k n,theor
n
nmax
n *,theor
60(6=
Name
maxon
Drehzahlkonstante (Katalogwert)
min-1/V
Soll-Drehzahlkonstante
min-1/V
Drehzahl
min-1
Maximale Drehzahl Lastzyklus
min-1
Soll-Leerlaufdrehzahl
min-1
Kennliniensteigung Motor
(Katalogwert)
min-1/mNm
maxon-Formelsammlung
7.
maxon sensor
maxon-Inkrementalencoder
360°e
90°e
Kanal A
Kanal B
Signalflanken (Quadcounts)
Indexkanal I
W$*3'(?"<6@"4/0*."*
QUAD MEnc
B-
EASY
MILE
Optisch
Hohe Pulszahlen
✘
✘
✔
✔
✔
✔
Hohe Drehzahlen
✔
✔
✔
✔
✔
✘
Tiefe Drehzahlen
✘
✘
✔
✔
✔
✔
Line Driver (bei langen Kabeln,
rauen Umgebungsbedingungen,
Positionieranwendungen)
✘
✘
✔
✔
✔
✔
Tiefe Positioniergenauigkeit oder
positionieren mit Getriebe
✘, ✔
✔
✔
✔
✔
✔
Hohe Positioniergenauigkeit
✘
✘
✘, ✔
✔
✔
✔
Indexkanal (für präzise Referenzfahrt) ✘
✘
✔
✔
✔
✔
Staub, Schmutz, Öl
✔
✔
✔
✔
✔
✘
Ionisierende Strahlung
(✔)
(✔)
✘
✘
✘
✘
Externe Magnetfelder
✘
✘
✘
(✔)
✔
✔
Mechanisch robust
✔
✘
✘
✔
✔
✘
✔!Empfohlen
✔ mit Einschränkungen
maxon-Formelsammlung
(✔) Option (auf Anfrage)
✘ nicht Empfohlen
43
]<60/3?'4/+'03+R)3$($)*3'0`J30*.
Benötigte Impulszahl N des
Encoders für eine gefordete
Postioniergenauigkeit 6<$
!"#"
360°
$%"&"'
Bemerkung: Durch Auswertung der Quadcounts qc#)/9b0?#1'4#)<4)#J2#9T9)/)#$%&T:%4(-#H':#
für eine präzise Regelung mindestens empfohlen wird.
B"33'0`J30*.+B)()#1#"4?'4/
Beispiel:
Messauflösung 6_`#
+#Q5l1:
Impulszahl N#]4536)/`## R**#jPU
!" =
!#
Q·N
!#
!" =
=
Q·N
1
qc
ms
=
qc
!""""""""""#"$%%"IMP
IMP
qc
$%"
= (%&$%"-1
'%%%"qc
&%"%%%"
Bemerkung: Die erreichbare Drehzahlstabilität ist aufgrund der Massenträgheiten und einer
eventuellen Vorsteuerung (feed forward) viel höher als die hier berechnete Messauflösung.
Symbol
N
i
_!"!J#
6_#
44
Name
Impulszahl pro Umdrehung
Untersetzung mech. Antrieb
a%'653%4?:#C/3#j1C%0:#
P)::'%&T:%4(##
SI Symbol
IMP 6<#
Q5ljPU Symbol
Q5l1: 60!#
Name
U3:<?<34:'%&T:%4(#
Name
P)::'%&T:%4(#P3?3/6/)9Y'90#
SI
f
maxon
1<4-1
maxon-Formelsammlung
;7+
8.1
<'=)*>-"./"#
Betriebsquadranten
Betriebsquadranten
Quadrant II
Bremsbetrieb
Rechtslauf
(CW)
n
n
M
1-Q-Betrieb
– Nur Motorbetrieb
(Quadrant I oder Quadrant III)
– Drehrichtungsumkehr durch digitales
Signal
– Typisch: Verstärker für EC-Motoren
– Bremsen nicht geregelt (Reibung),
oft langsam
Quadrant I
Motorbetrieb
Rechtslauf
(CW)
n
M
M
Quadrant III
Motorbetrieb
Linkslauf
(CCW)
;7N+
M
M
n
4-Q-Betrieb
– geregelter Motorbetrieb und Bremsbetrieb in beide Drehrichtungen
(alle 4-Quadranten)
– Ein Muss für Positionieraufgaben
Quadrant IV
Bremsbetrieb
Linkslauf
(CCW)
n
803/".0*.+1"#+2(#)<,"#3)#.0*.
W#@)#1"#/$I4"+!"#3)#.0*.336'**0*.+A"$+,)#."."A"*"#+O'3(+(nL, ML)
VCC!"
()
#%
+ #(max (maxon-Einheiten)
L
%0,() &!!!%L!'!!!!!!!!!&!$
#$
Hinweise:
– Bei einem 4Q-Servoverstärker muss die Stromversorgung in der Lage sein, die während dem
Abbremsen der Last gewonnene kinetische Energie zu speichern (beispielsweise in einem
Kondensator).
– Bei Verwendung eines stabilisierten Netzteils muss der Überstromschutz für den Arbeitsbereich
deaktiviert sein.
– Die Formel berücksichtigt bereits den maximalen Spannungsabfall 6\ der Steuerung beim
maximalen Dauerstrom.
W##"$I4A'#"+Z#"4?'4/+A"$+,)#."."A"*"#+26'**0*.3,"#3)#0*.
nL!"!!!(VCC #!$U max ) ·
Symbol
M
ML
UN
VCC
6\max
Name
Drehmoment
Lastdrehmoment
Nennspannung Motor (Katalogwert)
Versorgungsspannung
Max. Spannungsabfall Steuerung
maxon-Formelsammlung
SI
Nm
Nm
V
V
V
n0,UN
UN
Symbol
n
nL
n*-UN
60(6=
–
$&
$% '!%L
(maxon-Einheiten)
Name
Drehzahl
Lastdrehzahl
Leerlaufdrehzahl Motor bei UN
(Katalogwert)
Kennliniensteigung Motor
(Katalogwert)
maxon
min-1
min-1
min-1
min-1/mNm
45
;79+
Y#J33"+1"#+B)()#1#)33"/+A"$+R\B>-"./"#*
Berechnung Stromrippel
PWM Schema
1-Q
Maximaler
Stromrippel
Peak-to-Peak
!"PP,max =
Berechnung Ltot
Ltot = Lint + *";"""*"A!E![mot + Lext
VCC
4 · Ltot · fPWM
N>O","/+PT>aQ
3-O","/+PT>aQ
VCC
!"PP,max = 2 · L
· fPWM
tot
VCC
!"PP,max = 4 · L
· fPWM
tot
Die effektiv wirkende Motorinduktivität bei rechteckförmiger PWM-Anregung beträgt nur
5'"#;*#o#A*^#6):#d'?'03(H)/?):#Lmot.
Der Katalogwert Lmot#<:?#L)<#)<4)/#_/)Q%)4Y#E34#+#>[Y#1<?#:<4%:XT/1<()/#$4/)(%4(#6)=4<)/?"
– Bei Stromrippeln 6ZPP p#+"R#e#IN >'44#6)/#P3?3/#4359#L<:#)?H'#k*^#6):#q)44:?/31:#IN
(Katalogwert) belastet werden.
– Bei Stromrippeln 6ZPP r#+"R#e#IN wird der Einsatz einer externen Motordrossel
nach untenstehender Formel empfohlen.
M"#"I4*0*.+?03H(?/$I4"+"=("#*"+B)()#1#)33"/
PWM-Schema
F>a+0*1+9>O","/+PT>aQ
Faustformel
Lext =
Lext!P!*#
Lext > *#
N>O","/+PT>aQ
VCC
6 · IN · fPWM – Lint – 0.3 · Lmot
VCC
Lext = 3 · I
– Lint – 0.3 · Lmot
· fPWM
N
>)<4)#Y%:b?Y0<59)#P3?3/6/3::)0#43?H)46<(
Y%:b?Y0<59)#P3?3/6/3::)0#)1CX390)4
DC Verstärker
EC Verstärker
Lint
/2 Lint
1
1
1
1
Lext
/2 Lext
PWM
PWM
DC
Motor
Lmot
/2 Lint
/2 Lext
PWM
1
/2 Lint
EC
Motor
Lmot
1
/2 Lext
PWM
Symbol
IN
Lext
Lint
Lmot
46
Name
Nennstrom Motor (Katalogwert)
Induktivität, zusätzliche externe
Motordrossel
Induktivität, eingebaute Drossel Regler
Anschlussinduktivität Motor (Katalogwert)
SI Symbol
A Ltot
VCC
H f PWM
H 6ZPP
H 6ZPP,max
Name
Gesamtinduktivität
Versorgungsspannung
UVP#_/)Q%)4Y
Stromrippel Peak-to-Peak
Maximaler Stromrippel Peak-to-Peak
SI
H
V
Hz
A
A
maxon-Formelsammlung
9.
9.1
Thermisches Verhalten
Grundlagen
Wärmequellen
W$3"*,"#/03("+$*+WC>
Ummagnetisierungsverluste
Motoren und Motoren
P
= ! n · Mmagn
mit Eisenkernwicklung V, magn 30
Wirbelstromverluste
PV,eddy!"!230.8!E!02
Widerstand R
Joule’sche Verluste
in der Wicklung
PJ = RTW · Imot2
RTW
Rmot
25°C
RTW = Rmot · [1!O!1Cu · (TW – 25°C)]
Temperatur T
TW
-"$A,"#/03("+$*+1"#+O'."#0*.+0*1+$*+1"*+MK#3("*+PZC+B)()#"*Q
Verluste
im Getriebe
Wirkungsgrad !
100%
80%
60%
40%
PV,R = ! · nmot · Mmot · (1"#"$G )
30
1-stufig
3-stufig
5-stufig
MG, cont
Drehmoment M
PV,R =
!
1#$#"G
· n · ML ·
30 L
"G
Z0#I4+W#LH#<0*.+,"##$*."#("3+8*4'/("<)<"*(
Erste Näherung; berechnet aus Spannung und erhöhtem
Wicklungswiderstand
(Temperaturabhängigkeit von kM nicht berücksichtigt)
MHT = kM · IAT = kM ·
Umot
RTW
Wärme speichern
_!"!2!E!J!E!6W!"!ath!E!6W
_!"!bv!E!8
Wicklung: Cth,W = cCu!E!JW
Stator: Cth,S = cFe!E!Jmot
Symbol
Cth
Cth,G
Cth,S
Cth,W
c#
I AT
Imot
kM
M
MG,cont
MHT
ML
Mmagn
Mmot
m
mG
mmot
mW
PJ
PV
PV,eddy
Name
SI
Wärmekapazität
J/K
Wärmekapazität Getriebe
J/K
Wärmekapazität Stator
J/K
Wärmekapazität Wicklung
J/K
8C)Y<=:59)#Vb/1)>'C'Y<?b?#
slD>(dF
Anlaufstrom bei Temperatur TW
A
Motorstrom
A
Drehmomentkonstante (Katalogwert) Nm/A
Drehmoment
Nm
Max. Dauerdrehmoment Getriebe
(Katalogwert)
Nm
Anhalte(dreh)moment bei Temperatur TW Nm
Lastdrehmoment
Nm
Drehmoment für Ummagnetisierung
Nm
Motordrehmoment
Nm
Masse
kg
Masse Getriebe
kg
Masse Motor
kg
Masse Wicklung
kg
Joule’sche Verlustleistung
W
Verlustleistung
W
Wirbelstrom-Verlustleistung
W
maxon-Formelsammlung
Getriebe: Cth,G = cFe!E!JG
Symbol
PV,magn
PV,R
_
Rmot#
RTW
T
TW
t
Umot
6W
K
KG
Name
SI
Ummagnetisierungs-Verlustleistung
W
Reib-Verlustleistung
W
Gespeicherte Wärmemenge
J
$4:590%::H<6)/:?'46#P3?3/#Dd'?'03(H)/?F# i
Wicklungswiderstand bei aktueller Temp. TW# i
Temperatur
°C
Wicklungstemperatur
°C
Zeit
s
Motorspannung
V
Temperaturdifferenz
K
Wirkungsgrad
Getriebewirkungsgrad
Symbol
n
nL
nmot
Name
Drehzahl
Lastdrehzahl
Motordrehzahl
Symbol
1Cu#
cCu#
cFe#
Name
Wert
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
*"**;k#d-1
8C)Y"#Vb/1)>'C'Y<?b?#d%CX)/#
;A*#slD>(dF
8C)Y"#Vb/1)>'C'Y<?b?#]<:)4# JR*#t#Ju*#slD>(dF
maxon
min-1
min-1
min-1
47
8*'/).$"+?0<+"/"&(#$3I4"*+2I4'/(&#"$3:
thermisch
Verlustleistung PV
Strom I
elektrisch
C1
TW
Cth,W
R1
Rth1
∆TW
U1
TS
Cth,s
C2
Rth2
∆TS
U2
TA
GND
R2
thermisch "#IcCJNde..
Verluste
elektrisch "#f8C3Jde..
8?/31Q%)00)
Symbol
_!
PV
6W W
6WS
TA
Rth1
Symbol
_!
I
U1
U2
GND
R1
Name
Elektrische Ladung
Strom
Spannung, Potentialdifferenz
Spannung, Potentialdifferenz
Masse
Elektrischer Widerstand!
R2
Elektrischer Widerstand!
R
C1
C2
Elektrische Kapazität
Elektrische Kapazität
F
F
Rth2
Cth,W
Cth,S
Name
Einheit
Gespeicherte Wärmemenge
J
Verlustleistung
W = J/s
Temperaturdifferenz Wicklung – Umgebung K
Temperaturdifferenz Stator – Umgebung
K
Umgebungstemperatur
°C (K)
Therm. Widerstand Wicklung-Gehäuse
(Katalogwert)
K/W
Therm. Widerstand Gehäuse-Luft
(Katalogwert)
K/W
Wärmekapazität Wicklung
J/K
Wärmekapazität Stator
J/K
Erwärmung eines einfachen Körpers
Einheit
C
A = C/s
V
V
V
R
Abkühlung eines einfachen Körpers
Temperatur T
Temperatur T
Tstart
Tend
Erwärmung
63%
Tstart
!Tmax = 100%
Tend
"th
Zeit t
[ ]
– !t
"#$%& = "#end · 1'(')
Symbol
T
TA
Tend
TS
Tstart
TW
JA
th
Name
Temperatur
Umgebungstemperatur
Endtemperatur
Statortemperatur
Starttemperatur
Wicklungstemperatur
!Tmax = 100%
63%
Abkühlung
"th
"#$%& = "#start '()
SI
°C
°C
°C
°C
°C
°C
Symbol
t
6Wmax
6WL8M
Q th
Zeit t
– !t
th
Name
Zeit
Maximale Temperaturänderung
Temperaturänderung in
Abhängigkeit der Zeit t
Thermische Zeitkonstante
SI
s
K
K
s
maxon-Formelsammlung
9.2
Dauerbetrieb
Der Dauerbetrieb ist gekennzeichnet durch thermisches Gleichgewicht. Nach mehreren Statorzeitkonstanten bleibt die Temperaturdifferenz zwischen Rotor und Stator konstant, da deren Temperaturen
nicht weiter ansteigen.
Motor: Wicklungs- und Statortemperatur
!
Temperatur T
140
#$Erwärmen der Wicklung gemäss
der thermischen Zeitkonstanten der
Wicklung !W
120
TW,∞
"$Erwärmen des Stators gemäss
100
Rth1
der thermischen Zeitkonstanten
des Stators !s
80
∆TW
TS,∞
!$Thermisches Gleichge- "
wicht nach mehreren
Stator-Zeitkonstanten
60
!"W =
Stator
Rth2
40
#
20
Wicklung
Temperaturdifferenz
0
10
1
100
1000
Zeit t
6WW = TW!;!WA = (Rth1 + Rth2)!E!bJ
∆TS
Rth1 · RTA · I mot2
1#$#%Cu· Rth1· RTA· I mot2
!"S = "S – "A =
Rth2
!"W
Rth1 + Rth2
TA
10000
Getriebe: Gehäusetemperatur
PV, G
TG
6WG = TG!;!WA = Rth,G!E!bV,G
Rth,G
∆TG
Rth, G : z.B. geschätzt mit Rth2 von
Motoren derselben Grösse
PV, G
TA
Symbol
Imot
PJ
PV,G
RTA
Rth,G
Rth1
Rth2
T
TA
TG
TS
Name
SI Symbol
Motorstrom
A TfAg
Joule’sche Verlustleistung
W TW
Verlustleistung Getriebe
W T IAg
Wicklungswiderstand bei TA#
i t
Therm. Widerstand Getriebe – Umgebung K/W 6WG
6WS
Therm. Widerstand Wicklung – Gehäuse
(Katalogwert)
K/W 6WW
QS
Therm. Widerstand Gehäuse – Umgebung
(Katalogwert)
K/W QW
Temperatur
°C
Umgebungstemperatur
°C
Getriebetemperatur
°C Symbol
Statortemperatur
°C 1Cu#
maxon-Formelsammlung
Name
SI
Endtemperatur Stator
°C
Wicklungstemperatur
°C
Endtemperatur Wicklung
°C
Zeit
s
Temperaturunterschied Getriebe – Umgebung K
Temperaturunterschied Stator – Umgebung
K
Temperaturunterschied Wicklung – Umgebung K
Therm. Zeitkonstante Stator (Katalogwert) s
Therm. Zeitkonstante Wicklung
(Katalogwert)
s
Name
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
Wert
*"**;k#d-1
49
Zulässiger Nennstrom IN
Temperaturabhängigkeit bei Standard
Montagebedingungen (freie Konvektion bei 25°C;
Ankoppelung horizontal an Kunststoffplatte)
Drehzahl n
Grenzdrehzahl
IN,TA = IN ·
Dauerbetrieb
Tmax – TA
Tmax – 25°C
Kurzzeitbetrieb
Temperaturabhängigkeit bei veränderten
Montagebedingungen
nN
MN Drehmoment M
IN Motorstrom Imot
IN,TA = IN ·
Tmax – TA
Rth1 + Rth2
·
Tmax – 25°C Rth1 + Rth2,mod
M"3($<<0*.+,)*+Rth2,mod
PV
Motor unter Originalbedingungen
– Montage, Befestigung, Luftzirkulation
TW
Rth1
Separate Messung im Dauerbetrieb
bei beliebigem Motorstrom Imot
– Statortemperatur TS,
– Umgebungstemperatur TA
PV
TS
Rth2, mod
∆TS
Rth2,mod!$!%&S ·
PV
1!"!#Cu · Rth1 · RTA · I mot 2
RTA · I mot 2 · (1!'!#Cu · %&S )
TA
Symbol
Imot
IN
IN,TA
M
MN
PV
RTA
Rth1
Rth2
Rth2,mod
#
R*
Name
Motorstrom
Nennstrom Motor (Katalogwert)
Nennstrom in Abhängigkeit von TA
Drehmoment
Nennmoment Motor (Katalogwert)
Verlustleistung
Wicklungswiderstand bei TA#
Therm. Widerstand Wicklung – Gehäuse
(Katalogwert)
Therm. Widerstand Gehäuse – Umgebung
(Katalogwert)
Therm. Widerstand Gehäuse
W1()L%4(#136<=Y<)/?#
SI
A
A
A
Nm
Nm
W
i
Symbol
TA
Tmax
TS
TW
6WS
Symbol
K/W n
nN
K/W
Symbol
dlV 1Cu#
Name
Umgebungstemperatur
Maximal zulässige Wicklungstemperatur
(Katalogwert)
Statortemperatur
Wicklungstemperatur
Temperaturunterschied Stator – Umgebung
Name
Drehzahl
Nenndrehzahl Motor (Katalogwert)
Name
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
SI
°C
°C
°C
°C
K
maxon
min-1
min-1
Wert
*"**;k#d-1
maxon-Formelsammlung
b79+
cD&/03>+0*1+8033"(?A"(#$"A+P&)*($*0$"#/$I4+L$"1"#4)/(Q
Sich wiederholende Arbeitszyklen von kurzer Dauer (typisch bis wenige Sekunden) können mit
demselben Formalismus wie der Dauerbetrieb betrachtet werden.
Temperatur T
90.00
80.00
WicklungsZeitkonstante 9s
70.00
mittlere
Endtemperatur
der Wicklung
60.00
50.00
40.00
ein aus ein
(1s) (3s)
aus
30.00
0.1
1
10
100 1000 10000
Zeit t
Mittlere Erwärmung bei intermittierendem Betrieb
Effektivwert des Stroms (RMS) als
!"W =
Motorbelastung einsetzen
!"S =
(Rth1 + Rth2 !"#"RTA"#"I RMS 2
1#$#%Cu (Rth1 + Rth2 !"#"RTA"#"I RMS 2
Rth2
!"W
(Rth1 + Rth2 )
8033"(?A"(#$"A
RMS Strom
Strom I
IRMS = Ion ·
Ion
IRMS
Grundbedingung: IRMS!P!ZN,TA
ton toff
Temperatur T
TW,av!
TS,∞
Symbol
I
IN
I N,TA
Ion
IRMS
RTA
Rth1
Rth2
T
TA
ton
ton + toff
Zeit t
Tmax
Maximaler Belastungsstrom für gegebenen
Zeitzyklus
Ion!"!!#N ·
Pausenlänge bei Belastung mit Ion während ton
I on 2
– 1 % ton
toff!"
Tmax!#!$A
I N 2 % T – 25°C
max
Name
SI Symbol
Strom
A Tmax
Nennstrom Motor (Katalogwert)
A
Nennstrom in Abhängigkeit von TA
A TfAg
Strom während Ein-Phase
A T IA@9g
Effektivwert Strom (RMS)
A t
Wicklungswiderstand bei TA#
i toff
ton
Therm. Widerstand Wicklung – Gehäuse
(Katalogwert)
K/W 6WS
6W W
Therm. Widerstand Gehäuse – Umgebung
(Katalogwert)
K/W
Temperatur
°C Symbol
Umgebungstemperatur
°C vCu#
maxon-Formelsammlung
Tmax – TA
ton – toff
·
Tmax – 25°C
ton
Name
SI
Maximal zulässige Wicklungstemperatur
(Katalogwert)
°C
Endtemperatur Stator
°C
Mittlere Endtemperatur Wicklung
°C
Zeit
s
Ausschaltdauer
s
Einschaltdauer
s
Temperaturunterschied Stator – Umgebung K
Temperaturunterschied Wickl. – Umgebung K
Name
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
Wert
*"**;k#d-1
51
b7T+
50#??"$(A"(#$"A
Starke einmalige Überlast des Motors. Der Betrieb ist so kurz, dass sich die Temperatur des thermisch
?/b()4#8?'?3/:#4<59?#:<(4<=>'4?#)/9T9?-#H':#)<4)/#]<4:59'0?6'%)/#L<:#5'"#QS l+*#D #R#e#Qw) entspricht.
" Nur die Erwärmung der Wicklung ist zu berücksichtigen, was der Erwärmung eines einfachen
Körpers entspricht (siehe Kap. 9.1).
Temperatur T
140
!
120
TW,!
TfAg = TA
100
Rth1
80
≤ 0.1 !s
60
"
Stator
#
40
differenz
10
100
Zeit t
1000
!"W =
Rth2
Rth1 · RTA · I mot2
1#$#%Cu· Rth1· RTA· I mot2
TA
0
1
6WW = Rth1!E!bJ
TS,!
Temperatur-
Wicklung
20
∆TW
10000
Überlastfaktor K
a%'4?<=Y<)/%4(#6)/#wL)/0':?
I
Bedeutung:
K = mot ·
IN
– K < 1: Tmax wird nicht erreicht im Kurzzeitbetrieb
– K > 1: max. Einschaltdauer ton begrenzen
Maximal zulässige Überlast
bei gegebener Einschaltzeit ton
1
K=
1 – exp –
Maximale Einschaltdauer ton bei gegebenem
Überlastfaktor K
ton!"!#W $ ln
Maximaler Motorstrom Imot bei gegebenem
Überlastfaktor K
Imot = K · IN ·
Symbol
Imot
IN
K
PJ
RTA
Rth1
Rth2
T
TA
Tmax
52
Tmax – 25°C
Rth1
·
Tmax – TS
Rth1 + Rth2
Name
SI Symbol
Motorstrom
A TIAg
Nennstrom Motor (Katalogwert)
A TS
TfAg
Überlastfaktor
Joule'sche Verlustleistung
W ton
Wicklungswiderstand bei TA#
i t
6W W
Therm. Widerstand Wicklung – Gehäuse
(Katalogwert)
K/W
QS
Therm. Widerstand Gehäuse – Umgebung
(Katalogwert)
K/W QW
Temperatur
°C
Umgebungstemperatur
°C
Symbol
Maximal zulässige Wicklungstemperatur
(Katalogwert)
°C vCu#
ton
!W
K2
K2 – 1
R + Rth2
Tmax – TS
· th1
Tmax – 25 C°
Rth1
Name
Endtemperatur Wicklung
Statortemperatur
Endtemperatur Stator
Einschaltdauer
Zeit
Temperaturunterschied
Wicklung – Umgebung
Therm. Zeitkonstante Stator (Katalogwert)
Therm. Zeitkonstante Wicklung
(Katalogwert)
Name
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
SI
°C
°C
°C
s
s
K
s
s
Wert
*"**;k#d-1
maxon-Formelsammlung
10. Tabellen
10.1 maxon-Umrechnungstabellen
Hinweise
Basisgrössen und Basiseinheiten im
Internationalen Masssystem (SI)
Basisgrösse
Basiseinheit
Länge
Masse
Zeit
Elektrische
Stromstärke
Meter
Kilogramm
Sekunde
Ampère
Termodynamische
Temperatur
Kelvin
Umrechnungsbeispiel
A vorhandene Einheit (geg.)
B gesuchte Einheit (ges.)
gegeben:
3YO<4#
Multiplizieren mit
u"*I#
Basisgrösse für …
… Umrechnungen:
+#3Y# c#!"A;JkR!;+;#x#+*-2 kg
+#<4# c#!"RJ#x#+*-2 m
… Erdbeschleunigung:
(##
c#k"A*IIR#1#:-2
#
c#;AI"*AARA#<4#:-2
… Ableitungen:
1 yd = 3 ft = 36 in
+#0L## c#+I#3Y#c#u***#(/#D(/'<4:F
+#>C# c#+#>(#x#k"A*IIR#1:-2
1 N = 1 kgms-2
1 W = 1 Nms-1 = 1 kgm2s-3
1J
= 1 Nms-1 = 1 Ws
Leistung
B
A oz-in-s-1
W=Nm s-1 u"*Ix+*-3
mW
u"*I
1
Einheiten- oz-in-s-1
1
zeichen
ft-lbf-s-1
/192
m
kpm s-1
u"!*x+*-4
kg
s
Drehmoment
B
A oz-in
A
Nm
u"*Ix+*-3
mNm
u"*I
K
kpm
u"!*x+*-4
oz-in
1
1
ft-lbf
/192
gesucht:
1q1
oz-in-min-1 in-lbf-s-1 ft-lbf-s-1 Nm s-1 = W mW
kpm s-1
+"+ux+*-4 *"++;
1.356
1
+x+*-3
k"A*u
*"++u
112.9 +";RIx+*3 +#x#+*3
1
k"A*ux+*3
1
/I*
16
192
141.6
*"+J! +";kx+*3
1
1
/++R!*
/12
1
*"u;u *"u;ux+*-3 7.233
+"!x+*-5 +"+Rx+*-2 *"+;A
*"+*! *"+*!x+*-3
1
M [Nm]
ft-lbf Nm = Ws Ncm
mNm
kpm
pcm
1.356
1
+x+*-2
+x+*-3
k"A*u k"A*ux+*-5
+";RIx+*3 +x+*3
+*
1
k"A*ux+*3 k"A*ux+*-2
*"+;A
*"+*! *"+*!x+*-2 *"+*!x+*-3
1
+x+*-5
192
141.6
1.416
*"+J! +";kx+*3 +";kx+*-2
1
*"u;u *"u;ux+*-2 *"u;ux+*-3 7.233 u"!;;x+*-5
Massenträgheitsmoment
B
A oz-in2
oz-in-s2
lb-in2
lb-in-s2 Nms2=kgm2 mNm s2 gcm2
g cm2
+A!"k u"*Ix+*4 !"k;x+*3 +"+;x+*6
+x+*7
+x+*4
1
kgm2=Nms2 +"A;x+*-5 u"*Ix+*-3 !"k;x+*-4 *"++;
1
+x+*-3
+x+*-7
oz-in2
1
;AI"*A
16
I"+Ax+*3 R"JIx+*4
54.6 R"JIx+*-3
1
lb-in2
/16
!J"+;*
1
;AI"*A ;"J+x+*3
3.41 ;"J+x+*-4
Masse
m [kg] Kraft
A oz
lbf N
kp
B
A oz
lb
gr (grain)
kg
g
B
1
+x+*-3 N *"!uA J"JJA 1 k"A*u
kg
!A";Rx+*-3 *"JRJ IJ"ukx+*-6
3
-3
3
g
!A";R *"JRJx+* IJ"ukx+* +x+*
1
kp *"*!A *"JRJ *"+*! 1
oz
1
16
!"!Ax+*-3 35.27 ;R"!ux+*3 oz 1
16 ;"I** 35.27
1
1
lb
/16
1
/u***
!"!*R !"!*Rx+*3 lbf 1/16 1 *"!!R !"!*R
gr (grain) 437.5
u***
1
+R"J;x+*3 +R"J;x+*6 pdl !"*++ 32.17 7.233 u*"k;
Länge
A
in
ft
B
m
!R"Jx+*-3 *";*R
Z"?$<'/"+!$"/@'I4"+0*1+G"$/"+1"#+W$*4"$("*
cm
2.54
;*"R
mm
25.4
;*R
VorKurz- Zehner- Vor- Kurz- Zehner1
12
silbe zeichen potenz silbe zeichen potenz in
1
ft
/12
1
Dezi.. d
+*-1
Deka.. da
+*1
Hekto.. h
+*2
Zenti.. c
+*-2
Kilo.. k
+*3
Milli.. m
+*-3
Winkelgeschwindigkeit
Mega.. M
+*6
Mikro.. m
+*-6
B
A s-1 = Hz
min-1
#
Giga.. G
+*9
Nano.. n
+*-9
rad s-1
2#
/;*
1
Tera.. T
+*12
Piko.. p
+*-12
min-1
/I*
1
Lineare Geschwindigkeit
B
A in-s-1
in-min-1
m s-1
!"RJx+*-2 J"!;x+*-4
in-s-1
1
I*
1
ft-s-1
/12
5
Im maxon-Katalog
verwendete Einheiten
maxon-Formelsammlung
Temperatur
B
A
Kelvin
° Celsius
° Fahrenheit
P [W]
mNm min-1
1
/I****
1
/I*
!";Ix+*-3
+"!;x+*-5
+"u*x+*-6
yd
*"k+J
91.4
914
36
3
Mil
!R"Jx+*-6
!R"Jx+*-4
!R"Jx+*-3
+x+*-3
1
/12x+*-3
m
1
+x+*2
+x+*3
39.37
;"!A+
B
A
s-2
rad s-2
min-2
1
/;I**
#
/+A**
ft-s-1
*";*R
12
1
ft-min-1
R"*Ax+*-3
u!*
I*
m s-1
1
39.37
;"!A+
F [N]
p
k"A*ux+*-3
+x+*-3
;R"!ux+*-3
!"!*Rx+*-3
u*"k;x+*-3
l [m]
cm
mm
!
*"*+
+x+*-3
+x+*-6
1
*"+
+x+*-4
+*
1
+x+*-3
*";kJ ;"kJx+*-2 ;"kJx+*-5
;"!A+x+*-2 ;"!A+x+*-3 ;"!A+x+*-6
" [s-1] Winkelbeschleunigung
rad s-1
1
;*
/#
J [kg m2]
kpm s2
k"A*ux+*7
k"A*u
R";Rx+*5
;";Rx+*4
s-2
1
2#
rad s-2
1
/2#
1
v#y:-2]
min-1 s-2
1
/I*
#
/;*
v [m s-1]
cm s-1
mm s-1 m min-1
1
+x+*-2
+x+*-3
/I*
;k";ux+*-2 ;k";ux+*-3 *"IRI
-2
-3
;"!A+x+* ;"!A+x+* R"JIx+*-2
T [K]
° Fahrenheit
Df_#O;*R"+RF#l#+"A
Df_#O;!F#l#+"A
1
° Celsius
+ 273.15
1
+"AfN#z#;!
Kelvin
1
-273.15
+"A#d#z#;*R"+R
53
Fd7N+ GD6$3I4"+-"$A0*.3&)"@%?$"*("*+@K#+-)//>^+E'@(>+0*1+Y/"$(#"$A0*.
-"$A0*.3'#(
Gleitreibung
-"$A0*.3?03('*1
Beschreibung
Festkörperreibung
(trockene Gleitreibung)
unmittelbarer Kontakt der
Reibpartner
Grenzreibung
(geschmierte Gleitreibung)
Sonderfall der Festkörperreibung mit adsorbiertem
Schmierstoff an den
{L)/&b59)4
Mischreibung
Festkörperreibung und
Flüssigkeitsreibung
gemischt nebeneinander
Flüssigkeitsreibung
Reibpartner sind
6%/59#_0Z::<(>)<?:=01#
(hydrostatisch oder
hydrodynamisch erzeugt)
vollständig getrennt
Gasreibung
Reibpartner sind durch
gasförmigen Film
(aerostatisch oder
aerodynamisch erzeugt)
vollständig getrennt
!*h+**#^#9T9)/#
als Gleitreibung
Haftreibung
Rollreibung
Körper durch geschmierte
Wälzkörper getrennt
Wälzreibung
Rollreibung mit
Gleitkomponente (Schlupf)
Rollreibung
54
maxon-Formelsammlung
-"$A0*.3?'4/+(D6$3I4
*"+#h#+
*"+#h#*"!
Beispiele
-"$A0*.3?'4/
Sinterbronze – Stahl
*"+R#h#*";
Kunststoff – Grauguss
*";#h#*"J
Stahl – Stahl
*"J#h#*"u
Stahl nitriert – Stahl nitriert
*";#h#*"J
Kupfer – Kupfer
*"I#h#+"*
Chrom – Chrom
*"J+
Al-Legierung – Al-Legierung
*"+R#h#*"I
Stahl – Stahl
*"+
Gleitlager geschmiert bei tiefen Drehzahlen
*"*+#h#*"+
*"**+#h#*"*+
Sinterbronze – Stahl
*"*R#h#*"+
Sintereisen – Stahl
*"*u#h#*"+
Stahl gehärtet – Stahl gehärtet
*"*R#h#*"*A
Sintergleitlager geschmiert bei hohen Drehzahlen
und kleiner Radiallast
*"***+
*"+#h#+"!
*"**+#h#*"**R
Stahl – Stahl trocken
*"J#h#*"A
Stahl – Stahl geschmiert
*"*A#h#*"+!
Sinterbronze – Stahl trocken
*"!#h#*"J
Sinterbronze – Stahl geschmiert
*"+!#h#*"+J
Kunststoff – Grauguss trocken
*";#h#*"R
Kugellager
*"**+#h#*"**!R
*"**+#h#*"+
maxon-Formelsammlung
55
11. Symbolliste Formelsammlung
Name
Abstand der Achse s vom Schwerpunkt S
Anhalte(dreh)moment
Anhalte(dreh)moment bei Temperatur TW
Anlaufstrom
Anlaufstrom bei Temperatur TW
Anschlussinduktivität Motor (Katalogwert)
Anschlusswiderstand Motor (Katalogwert)
Ausgangsspannung
Ausgangsstrom
Auslenkung aus Ruhelage
Ausschaltdauer
Aussenradius
Beschleunigung
Beschleunigungskraft
Beschleunigungskraft 1. Halbtakt / 2. Halbtakt
Beschleunigungszeit
Blindwiderstand induktiv (Reaktanz)
Blindwiderstand kapazitiv
Dichte
Direktionsmoment (Federkonstante)
Drehmoment
Drehmoment 1. Halbtakt / 2. Halbtakt
Drehmoment Eingang
Drehmoment für Beschleunigung
Drehmoment für Ummagnetisierung
Drehmoment Betriebspunkte 1...n
Drehmoment Spiralfeder
Drehmomentkonstante (Katalogwert)
Drehwinkel
Drehzahl / Drehzahl, (-änderung)
Drehzahl Eingang
Drehzahl nach Beschleunigung
Drehzahl vor Beschleunigung
Drehzahländerung
Drehzahländerung Eingang
Drehzahlkonstante (Katalogwert)
Druck (1 Pa = 1 N/m2#c#+*-5 bar)
Druckkraft
Durchmesser Antriebsrad
Durchmesser Antriebsrolle
Durchmesser Lastrolle
Durchmesser Umlenkrolle 2
Durchmesser Umlenkrolle X
Effektivwert Drehmoment (RMS)
Effektivwert Strom (RMS)
Eingangsspannung
Einschaltdauer
Elektrische Eingangsleistung
Elektrische Kapazität
Elektrische Ladung
Elektrische Zeitkonstante
Elektrischer Widerstand
Elektromotorische Kraft
Endtemperatur
Endtemperatur Stator
Endtemperatur Wicklung
Ersatzwiderstand
Ersatzwiderstand von R2 und RL
Exzentrizität
Fallbeschleunigung
Fallhöhe
Federkonstante
Federkraft
_/)Q%)4Y#
Gesamtinduktivität
Gesamtspannung
Gesamtstrom
Gesamtzeit
Gesamtzeit Betriebszyklus
Geschwindigkeit / Geschwindigkeit, (-sänderung)
Geschwindigkeit nach Beschleunigung
Geschwindigkeit vor Beschleunigung
Gespeicherte Wärmemenge
Getriebetemperatur
Getriebewirkungsgrad
Gewichtskraft Körper
S/)4YX/)Q%)4Y#
Hangabtriebskraft
Hochlaufzeit
Höhe
Impedanz
Impulszahl pro Umdrehung
Induktivität
Induktivität, eingebaute Drossel Regler
56
Symbol
rs
MH
MHT
IA
IAT
Lmot
Rmot
Uout
Iout
67
toff
ra
a
Fa
Fa1 / Fa2
68a
XL
XC
?
km
M
Min1L<M!(!=in2L<M
Min
M/0A1 / M1
Mmagn
M1...n
MS
kM
6<!(!<
0!(!0A!60
nin
nend
nstart
60
60in
kn
p
Fp
d
d1
d2
d2
dX
Min,RMS / MRMS
IRMS
Uin
ton
Pel
C1 / C2
_
Qel
R / R1 / R2
EMK
Tend
TfAg
TIAg
R
Rx
e
g
h
k
FS
f
Ltot
U
I
68tot
ttot
9!(!9A!69!(!69
vend
vstart
_
TG
KG
FG
fC
FH
68
h
Z
N
L
Lint
Einheit
m
Nm
Nm
A
A
H
i
V
A
m
s
m
m/s2
N
N
s
i
i
kg/m3
Nm
Nm
Nm
Nm
Nm
Nm
Nm
Nm
Nm/A
rad
min-1
min-1
min-1
min-1
min-1
min-1
min-1/V
Pa
N
m
m
m
m
m
Nm
A
V
s
W
F
C
s
i
V
°C
°C
°C
i
i
m
m/s2
m
N/m
N
Hz
H
V
A
s
s
m/s
m/s
m/s
J
°C
N
Hz
N
s
m
i
IMP
H
H
2"$("*?'4/
13
;A-#;k-#J*-#J+-#J!
47
;k-#J*
47
J*-#JI
;!-#;A-#;k-#J*-#J+-#Ju
;*-#;J
;*
9
51
12, 13
9, 14
9, 24
24
22, 23, 24, 25
33, 34
33, 34
12, 13
11
++-#!+-#;A-#;k-#J*-#J+-#J!-#JR-#Ju-#R*
24
21, 22, 23, 25
11, 22, 23, 24, 25
47
42
11
;k-#J*-#J+-#J!-#Ju
++-#+R-#+A-#+k-#!J
+R-#!+-#;A#-;k-#J*-#J+-#J!-#JR-#Ju-#R*
22, 23, 24, 25
15
15
11, 41
22, 23, 24, 25
;k-#J*-#J!
9
9
23
22, 25
25
22
22
24, 42
51
;*-#;J
51, 52
;A
JA
JA
;*
!k-#;*-#;;-#;J-#JA
J*
JA
49, 51, 52
49, 52
31, 32
32
24
9, 14
14
9
9
33, 34
46
31, 32
31, 32
+I-#+u-#+A-#+k
42
9, 14, 21
14
14
Ju-#JA
49
47
9
34
9
41
12, 13
33
44
;*-#;;-#;J
46
maxon-Formelsammlung
Name
Induktivität, zusätzliche externe Motordrossel
Induzierte Spannung
Innenradius
j44)4H<6)/:?'46#8C'44%4(:Q%)00)#
Joule’sche Verlustleistung
Kapazität
Kennliniensteigung Motor (Katalogwert)
Klemmenspannung
Kraft (Force)
d/)<:X/)Q%)4Y#
Kurzzeitig zul. Drehmoment Getriebe (Katalogwert)
Lagerbelastung axial/radial
Länge
Länge Kante a / b / c
Lastdrehmoment
Lastdrehzahl
Lastgeschwindigkeit
Lastkraft (Abgang)
Lastkraft 1. Halbtakt / 2. Halbtakt
Lastspannung
Laststrom
Lastwiderstand
Leerlaufdrehzahl
Leerlaufdrehzahl Motor bei UN (Katalogwert)
Leerlaufstrom
Leistung
Masse
Masse
Masse Band
Masse Last
Masse Fahrzeug
Masse Getriebe
Masse Motor
Masse Riemen
Masse Spindel
Masse Wicklung
Masse Zahnstange
Massenträgheitsmoment
Massenträgheitsmoment abgangsseitig
Massenträgheitsmoment aller Räder zusammen
Massenträgheitsmoment antriebsseitig
Massenträgheitsmoment bezüglich der Achse s durch den Schwerpunkt S
Massenträgheitsmoment bezüglich der Drehachse x
Massenträgheitsmoment bezüglich der Drehachse y
Massenträgheitsmoment bezüglich der Drehachse z
Massenträgheitsmoment Eingang (Motor, Encoder, Bremse)
Massenträgheitsmoment Exzenterscheibe
Massenträgheitsmoment Getriebe transformiert
Massenträgheitsmoment Last
Massenträgheitsmoment Ritzel
Massenträgheitsmoment Rotor (Katalogwert)
Massenträgheitsmoment Spindel
Massenträgheitsmoment Umlenkrolle 2 / X
Max. Dauerdrehmoment Getriebe (Katalogwert)
Max. Spannungsabfall Steuerung
Maximal zulässige Wicklungstemperatur (Katalogwert)
Maximale Beschleunigung
Maximale Drehzahl Abgang
Maximale Drehzahl Eingang
Maximale Drehzahl Lastzyklus
Maximale Geschwindigkeit
Maximale Leistung
Maximale Temperaturänderung
Maximale Winkelbeschleunigung
Maximaler Stromrippel Peak-to-Peak
Maximaler Wirkungsgrad bei UN (Katalogwert)
Maximales Drehmoment Lastzyklus
Mechanische Abgabeleistung
Mechanische Eingangsleistung
Mechanische Leistung
Mechanische Zeitkonstante (Katalogwert)
Mechanische Zeitkonstante mit zusätzlichem JL
Mechanisches Spiel Abgang
Mechanisches Spiel Eingang
P)::'%&T:%4(#
P)::'%&T:%4(#P3?3/6/)9Y'90#
Mittlere Endtemperatur Wicklung
Mittlerer Lagerdurchmesser
Motordrehmoment
Motordrehzahl
Motorspannung
Motorstrom
Nenndrehzahl Motor (Katalogwert)
Nennmoment Motor (Katalogwert)
Nennspannung Motor (Katalogwert)
Nennstrom in Abhängigkeit von TA
maxon-Formelsammlung
Symbol
Lext
Uind
ri
Ri
PJ
C
60(6=
Ukl
F
>
MG,max
FKL
l
a/b/c
ML
nL
vL
FL
FL1 / FL2
UL
IL
RL
n*
n*,UN
I*
P
GND
m
mB
mL
mF
mG
mmot
mR
mS
mW
mZ
J
J2
JW
J1
Js
Jx
Jy
Jz
Jin
JE
JG
JL
JP
JR
JS
J2 / JX
MG,cont
6\max
Tmax
amax
nmax,L
nmax,in
nmax
vmax
Pmax
6Wmax
1max
6ZPP,max
Kmax
Mmax
PL / Pmech,L
Pmech,in
Pmech
Qm
Q m‘
6.L!(!6<L
6<in
6_
60
TIA@9g
rKL
Mmot
nmot
Umot
Imot
nN
MN
UN
IN,TA
Einheit
H
V
m
i
W
F
min-1/mNm
V
N
rad/s
Nm
N
m
m
Nm
min-1
m/s
N
N
V
A
i
min-1
min-1
A
W
V
kg
kg
kg
kg
kg
kg
kg
kg
kg
kg
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
kgm2
Nm
V
°C
m/s2
min-1
min-1
min-1
m/s
W
K
rad/s2
A
Nm
W
W
W
s
s
m / rad
rad
Q5l1:
min-1
°C
m
Nm
min-1
V
A
min-1
Nm
V
A
2"$("*?'4/
46
;k-#J*
12, 13
29
;A-#Ju-#Jk-#R!
;*-#;;-#;J
;k-#J*-#J!-#JR
29
9, 11, 21
33
26
11
13
13
11, 21, 25, 41, 45, 47
25, 41, 45, 47
21, 22, 23
+*-#!+-#!!-#!;
24
32
32
29, 32
;A-#;k-#J*-#J+
45
;k-#J*-#J!
!k-#;A
JA
9, 12, 13, 47
22
22, 23, 24
23
47
47
25
22
47
23
11
25
23
22, 25
13
12, 13
12, 13
12, 13
22, 23, 24, 25
24
25
25, 41
23
41
22
22, 25
26, 47
45
R*-#R+-#R!
16, 17
26
26
+A-#+k-#J!
16, 17
29
JA
+A-#+k-#J+
46
J*
42
!+-#;A
21
21
41
41
22, 23, 25
22, 23, 25
44
44
51
11
47
47
;A-#;k-#J*-#J!-#Ju
;A-#;k-#J*-#J+-#J!-#Ju-#Jk-#R*-#R!
R*
J!-#R*
;A-#;k-#J*-#JR
R*-#R+
57
Name
Nennstrom Motor (Katalogwert)
Normalkraft (Kraft senkrecht zur Ebene)
Periodendauer
Phasenverschiebungswinkel
U3:<?<34:'%&T:%4(#
Pull-down Widerstand
Pull-up Widerstand
Punkt 1 / 2 auf der x-Achse
UVP#_/)Q%)4Y#
Quadcounts pro Impuls
Querschnitt
Radius / Radius 1 / Radius 2
Radius Kreistorus um z-Achse
Reib(dreh)moment
Reibkraft
@)<L%4(:Y'90#D:<)9)#B'L)00)#d'C"#+*"!F
Reib-Verlustleistung
Sinusförmiger Geschwindigkeitsverlauf Last
Soll-Drehzahlkonstante
Soll-Leerlaufdrehzahl
Spannung
Spannung über Induktivität / Kapazität / Widerstand
Spannung, Potentialdifferenz
Speisespannung
Spez. Wärmekapazität Eisen
Spez. Wärmekapazität Kupfer
8C)Y<=:59)#Vb/1)>'C'Y<?b?#
Spindelsteigung
Starttemperatur
Statortemperatur
Steht für XC oder XL
Stellung Potentiometer
Strom
Strom durch Widerstand R2
Strom während Ein-Phase
Stromänderung
Stromrippel Peak-to-Peak
Teilkräfte
Teilmomente
Teilspannungen
Teilströme
Teilung Verzahnung
Teilwiderstände
Temperatur
Temperaturänderung in Abhängigkeit der Zeit t
Temperaturdifferenz
Temperaturunterschied Getriebe – Umgebung
Temperaturunterschied Stator – Umgebung
Temperaturunterschied Wicklung – Umgebung
Therm. Widerstand Gehäuse – Umgebung (Katalogwert)
B9)/1"#V<6)/:?'46#S)9b%:)#o#W1()L%4(#136<=Y<)/?#
Therm. Widerstand Getriebe – Umgebung
Therm. Widerstand Wicklung – Gehäuse (Katalogwert)
Therm. Zeitkonstante Stator / Wicklung (Katalogwerte)
Thermische Zeitkonstante
Überlastfaktor
Umgebungstemperatur
Ummagnetisierungs-Verlustleistung
Untersetzung Getriebe (Katalogwert)
Untersetzung mech. Antrieb
W/:C'44%4(#8C'44%4(:Q%)00)#
Verlustleistung / Verlustleistung Getriebe
Versorgungsspannung
Wärmekapazität
Wärmekapazität Getriebe / Stator / Wicklung
Weg
Wicklungstemperatur
Wicklungswiderstand bei aktueller Temp. TW
Wicklungswiderstand bei TA
Widerstand bei Temperatur T
Widerstand Potentiometer
V<6)/:?'46:>3)X=Y<)4?#d%CX)/#
Winkel schiefe Ebene
Winkelabhängige periodische Beschleunigungskraft
Winkelbeschleunigung
Winkelgeschwindigkeit nach / vor Beschleunigung
Winkelgeschwindigkeit / Winkelgeschwindigkeit, (-sänderung)
Winkelgeschwindigkeit Eingang / Last
Wirbelstrom-Verlustleistung
Wirkungsgrad
Zähnezahl Hohlrad / Ritzel / Sonnenrad
Zeit / Zeit, Zeitdauer
Zeit a / b / c
Zeitänderung
Zeitdauer
Zeitdauer Betriebspunkte 1...n
RA
Symbol
IN
FN
T
<
6<
Rd
Ru
x1 / x2
fPWM
_!"!4
A
r / r1 / r2
R
MR
FR
4
PV,R
vL(t)
kn,theor
n*,theor
U
UL / UC / UR
U1 / U2
+V
cFe
cCu
c
p
Tstart
TS
X
x
I
IR2
Ion
]/
6ZPP
F1 / F2 / Fx
M1 / M2 / Mx
U1, U2
I1, I2
p
R1, R2
T
6WL8M
6W
6WG
6WS
6WW
Rth2
Rth2,mod
Rth,G
Rth1
QS!(!QW
Qth
K
TA
PV,magn
iG
i
U*
PV / PV,G
VCC
Cth
Cth,G / Cth,S / Cth,W
.A!6.!(!6.
TW
RTW
RTA
RT
R*
1Cu
1
FaL<M
1
>end!(!>start
>!(!>A!6>!(!6>
>in!(!>L
PV,eddy
K
z3 / z / z1
8!(!8A!68
68a!(!68b!(!68c
]8
68
t1…n
Einheit
A
N
s
°
°
i
i
m
Hz
Q5ljPU
m2
m
m
Nm
N
2"$("*?'4/
JI-#R*-#R+-#R!
9
33
34
44
;*
;*
13
46
44
9, 13
11, 12
12
++-#;k-#J*-#J+
9
9, 11
W
47
m/s
24
min-1/V
42
min-1
42
V
29, 33
V
34
V
JA
V
;*
JR*#t#Ju*#slD>(dF 47
;A*#slD>(dF
47
J/(kgK)
47
m
22
°C
JA
°C
JA-#Jk-#R*-#R!
i
33
*h+
32
A
!k-#;;-#;J-#JA-#R+
A
32
A
51
A
J*
A
46
N
+*
Nm
11
V
31, 32
A
31
m
23
i
31, 32
°C
Ju-#JA-#Jk-#R+-#R!
K
JA
K
32, 47
K
49
K
JA-#Jk-#R*-#R+
K
JA-#Jk-#R+-#R!
K/W
JA-#Jk-#R*-#R+-#R!
K/W
R*
K/W
49
K/W
JA-#Jk-#R*-#R+-#R!
s
49, 52
s
JA
52
°C
JA-#Jk-#R*-#R+-#R!
W
47
25, 26
44
V
29
W
!k-#Ju-#JA-#Jk-#R*
V
45, 46
J/K
47
J/K
Ju-#JA
m
14, 16, 17
°C
Ju-#JA-#Jk-#R*
i
47
i
Jk-#R*-#R+-#R!
i
32
i
32
*"**;k#d-1
;!-#Ju-#Jk-#R*-#R+-#R!
°
9
N
24
11, 15, 41
rad/s2
rad/s
15
rad/s
11, 15, 21
rad/s
21
W
47
!+-#!!-#!;-#!J-#!R-#J*-#Ju
23, 25
s
+J-#+R-#!J-#;*-#;;-#J+-#Ju-#JA-#Jk-#R+-#R!
s
+I-#+A
s
J*
s
9, 11, 15
s
42
maxon-Formelsammlung
academy.maxonmotor.ch