Praktikumsanleitungen v1.13
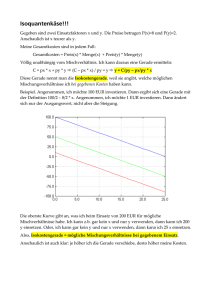
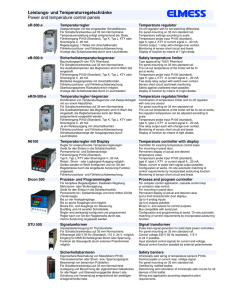
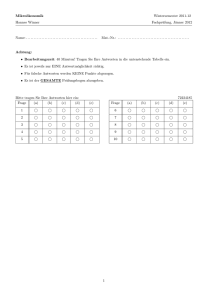
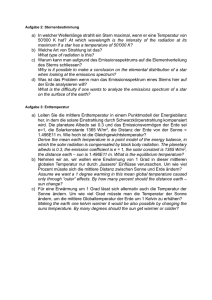
Werbung

FB Physikalische Technik Prof. Dr. Thomas Rose Praktikum Sensortechnik Versuchsbeschreibungen und Testatliste Name: Vorname: Studiengang: Physikalische Technik [ ] Wirtschaftsing. [ ] Matrikelnummer: durchgeführt im: WS Versuch Antestat Datum 1 Temperatur 2 Drehzahl 3 PSD Antestat Unterschrift Endtestat Datum Endtestat Unterschrift Die / der Studierende hat das Praktikum erfolgreich absolviert und ist zur Klausur Sensortechnik zugelassen Steinfurt, den ___________________________________ Prof. Dr. Thomas Rose Bringen Sie zum Unterschreiben dieses Original und zwei Kopien mit. Das Original ist für Sie, die Kopien für das Dekanat und mich. Prof. Dr. Rose FH Münster Stegerwaldstr. 39 48565 Steinfurt Tel: 02551/962 -124 / -166 Fax: 02551/962-201 e-mail: [email protected] 10.12.2013 Datei TITEL13.DOC vom 10.12.2013 2:12 Seite 2 von 2 Praktikum Sensortechnik 1 Temperaturmessung Szenario Sie arbeiten im Entwicklungslabor einer Messgerätefirma und sollen ein elektronisches Thermometer entwickeln, das vermarktet werden soll. Dabei sollen zwei unterschiedliche Sensoren ausprobiert werden: ein Pt100 Widerstandssensor und ein Thermoelement vom Typ K. Als Anforderungen wurden von der Marketingabteilung unter anderem genannt: Messbereich 0°C bis 100°C Messgenauigkeit +-1 K Eine erste Recherche ergibt, dass für Thermoelemente ICs angeboten werden, die die gesamte notwendige Elektronik enthalten, z.B. der AD594 / AD 595 der Firma Analog Device. Für einen Pt100 Sensor muss eine eigene Schaltung entwickelt werden. Sie müssen also zwei Dinge tun. Für den Pt100 entwickeln Sie eine Schaltung, die den Widerstandswert in eine Spannung umwandelt. Sie soll bei 0°C gleich 0 Volt sein und bei 100°C gleich 10 V. Dann kann zur Anzeige ein einfaches Voltmeter verwendet werden. Da alle Bauteile, beispielsweise Widerstände. Exemplarschwankungen aufweisen, müssen in dieser Schaltung zwei Widerstände so eingestellt werden (getrimmt werden), dass diese Referenzwerte auch erreicht werden. Dann müssen Sie in einer Messung bei verschiedenen Temperaturen die Anzeige Ihres Messgerätes mit der eines Kalibriernormales vergleichen. Damit sehen Sie dann, welche Messgenauigkeit das Gerät hat und ob die Entwicklungsvorgabe erreicht wurde. Beim Thermoelement muss nur der Sensor mit dem IC verbunden werden. Dann können Sie ebenfalls eine Kalibriermessung durchführen. Danach wissen Sie, ob die geforderte Messgenauigkeit erreicht wurde. Nun können Sie noch die beiden Messgeräte (Pt100 bzw. Thermoelement) wirtschaftlich vergleichen. Um einen ersten Eindruck zu bekommen, vergleichen Sie einfach die Preise der Einzelteile beider Systeme. Praktikum Sensortechnik: Temperaturmessung Ziel dieses Versuches Temperaturmessung mit verschiedenen Sensoren durchführen können, einige Begrenzungen kennenlernen Inhalte Temperaturmessung mit Pt100 und Thermoelement, Eigenerwärmung Temperatursensors, Analogschaltungen zum Auslesen der Sensoren, eines Vorkenntnisse: Widerstand und Thermoelement als Temperatursensor, Verstärkerschalrungen mit OP, Auswertung siehe letztes Kapitel der Anleitung benötigte Hilfsmittel Protokollbuch (DIN A 5-, besser DIN A4-Kladde, kariert), Rechner, Millimeterpapier Anhang: Datenblätter Thomas Rose TEMPERATUR13_01.DOC Version 18 vom 05.12.2013 5:06 Seite 2 von 12 2 Einleitung In diesem Versuch sollen Sie also Schaltungen mit einem Pt 100 und mit einem Thermoelement entwerfen, bauen, optimieren und testen. 2.1 Pt100 Bei Widerstandssensoren gibt es das Problem der Selbsterwärmung. Am Pt 100 liegt ja eine Spannung an und es fließt ein Strom, also entsteht im Sensor eine Verlustleistung, die den Sensor erwärmt. Die Messung wird also verfälscht. Man muss wissen, welche Verlustleistung welche Temperaturerhöhung bewirkt. Dies wird durch den Wärmeübergangswiderstand Rth bestimmt. Er wird oft im Datenblatt des Sensors angegeben. Wir müssen ihn leider selbst bestimmen. Dann kann man eine maximale Erhöhung vorgeben, z.B. 0,2K, und daraus die erlaubte Verlustleistung ausrechnen. Dann werden Sie den Pt 100 in einer Brückenschaltung aufbauen und die Brückenspannung mit einem Differenzverstärker auslesen. Hier besteht die wesentliche Aufgabe darin, den Verstärker und die Brücke zu dimensionieren und dann praktisch zu optimieren. 2.2 Thermoelement Im zweiten Versuchsteil werden Sie ein Typ K Thermoelement mit dem IC von Analog Device verbinden und testen Praktikum Sensortechnik: Temperaturmessung 3 Theoretische Grundlagen 3.1 Pt 100 Für den Widerstand eines Pt 100 gilt R(T ) R(T0 ) (1 (T T0 ) (T T0 )² ) wobei =0.00398 1/K und =-0,59*10-6 K-2 Bei der Temperatur 0°C beträgt der Widerstand 100 Ohm. Im Praktikum verwenden wir eine lineare Näherung, das heißt, wir setzen =0. 3.2 Wärmeübergangswiderstand Wird in einem Bauteil elektrische Energie P in Wärme umgesetzt, so hängt die zur Umgebung erreichte Temperaturerhöhung dT von P und vom Wärmewiderstand Rth des Aufbaus ab. Es gilt dT Rth P Zur Messung des Widerstandswertes R des Sensors kann man beispielsweise den Sensor über einen Vorwiderstand RV an eine Spannung U legen. Durch Messen des Stromes I und der am Sensor abfallenden Spannung UM kann man dann R bestimmen. Allerdings wird dadurch im Sensor auch eine Leistung P umgesetzt, die ihn aufheizt. Die Frage ist also, wie groß darf P maximal sein, damit die Temperaturmessung nicht verfälscht wird. Hierzu werden Sie eine Messreihe aufnehmen und Rth bestimmen. 3.3 Elektronik 3.3.1 Schaltbild Links ist die Brückenschaltung, rechts der Verstärker abgebildet. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 4 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 3.3.2 Brückenschaltung Ist der maximal zulässige Strom bekannt, bauen Sie eine Brückenschaltung auf. Den Vorwiderstand R1 für den Sensor bestimmen Sie nach der vorherigen Überlegung. Den Referenzzweig dimensionieren Sie so, dass bei Temperatur 0°C die Brücke gerade abgeglichen ist. 3.3.3 Verstärker Die Brückenspannung wird auf einen Verstärker, gegeben, der die Messbrücke nicht zu stark belastet Bei T=100°C gerade die Spannung 10 V erzeugt. Diese Verstärkerschaltung sieht fast so aus wie der invertierende Verstärker aus der ADT-Vorlesung. Allerdings ist der + Eingang nicht mit Masse verbunden, sondern mit der Brücke. 3.3.4 Gesamtschaltung Die Gesamtschaltung hat dann obenstehende Form. Ist Ud die Differenzschaltung der Brücke, dann ist die Ausgangsspannung des OP näherungsweise U= -(R5 / R4 ) * Ud Leiten Sie zur Vorbereitung den genauen Zusammenhang ab. (Dazu können die Goldenen Regeln der OP Technik benutzt werden) Man kann jetzt R4 und R5 dimensionieren. Dazu berechnet man, wie groß Ud bei 100°C ist. Da dann die Ausgangsspannung 10 V sein soll, können Sie das Widerstandsverhältnis ausrechnen. Wenn Sie berücksichtigen, dass die Brücke durch den Verstärker wenig belastet werden soll, muss R4 viel größer als der Pt 100 sein. Also mindestens 10-mal größer. Damit können Sie die absoluten Werte aller Widerstände bestimmen. Dann können Sie eine Temperaturmessung durchführen, bei der x°C gerade x/10 Volt entsprechen. 3.4 Zeitkonstante Eine Änderung der Wärmezu- oder -abfuhr macht sich nicht sofort in der Temperatur bemerkbar. Vielmehr muss die Wärme über den Wärmeübergangswiderstand zugeführt werden und dann die Wärmekapazität des Bauteils aufheizen. Dies kann mit dem Auf- oder Entladen eines Kondensators verglichen werden. Befindet sich der Sensor auf Temperatur T0 und wird plötzlich in eine Umgebung mit Temperatur T1 gebracht, so gilt für die Temperatur als Funktion der Zeit T (t ) T0 t 1 exp( ) T1 T0 Dabei ist = Rth * Wärmekapazität. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 5 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 3.5 Temperaturmessung mit Thermoelement Sie wissen aus der Sensortechnik-Vorlesung, dass die Thermospannung Utah und die Messtemperatur T folgendermaßen zusammenhängen U th ( 1 0 )(T T0 ) Als Referenztemperatur wird T0=0°C genommen. Damit müsste für eine genaue Temperaturmessung immer der Referenzkontakt auf 0°C gehalten werden. Heute werden zur Auswertung meist integrierte Schaltungen verwendet, in denen neben der Verstärkung auch die Umgebungstemperatur gemessen wird. Diese wird dann im IC so verarbeitet, dass es so aussieht, als ob die Messung mit T0=0°C durchgeführt worden wäre. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 6 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 4 Vorbereitung vor dem Versuch (gehört ins Protokollbuch) Beschreiben Sie kurz und prägnant mit den wesentlichen Formeln, wie Pt100 und Thermoelement funktionieren. Dimensionieren Sie Brückenschaltung und Verstärker. Nehmen Sie einen Messstrom von 0,5mA an. (Später wird sich im Versuch zeigen, ob dies vernünftig war.) Stellen Sie in einer Tabelle die Temperatur T, die Spannung UT am Pt100 und die Brückenspannung Ud für T= 0°C, 50°C und 100°C dar. Beachten Sie, dass der Verstärker die Brücke nicht zu sehr belastet. Bestimmen Sie die notwendige Verstärkung. Zeichnen Sie die dimensionierte Schaltung ins Protokollbuch. Lesen Sie das Datenblatt für den AD594/595 und zeichnen Sie in einem Schaltbild, wie dieser Baustein mit Thermoelement und Spannungsversorgung verbunden werden muss. Wer die Schaltungen nicht verstanden die obigen Aufgaben nicht gemacht hat, kann den Versuch nicht durchführen. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 7 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 5 Durchführung des Versuchs 5.1 Messung mit Pt100 5.1.1 Thermischer Übergangswiderstand des Sensors Wird in einem Verbraucher, der zur Umgebung einen thermischen Übergangswiderstand Rth hat, eine thermische Leistung P umgesetzt, so wird er über die Umgebungstemperatur um eine Temperaturdifferenz dT erwärmt und es gilt: dT Rth P Legt man nun verschiedene Spannungen U an den Sensor, so fließt jeweils ein Strom I. Das Produkt U*I ergibt die Leistung P, das Verhältnis U/I ergibt den elektrischen Widerstand R des Sensors. R ist aber auch ein Maß für die Temperatur. Aus der Messung von U und I ergeben sich also Leistung und Temperatur T. Trägt man T als Funktion von P auf, so sollte sich eine Gerade ergeben. Deren Steigung ist gerade der Wärmewiderstand Rth. Sie verbinden den Sensor über einen Vorwiderstand RV mit einer Gleichspannungsquelle, deren Spannung zwischen 0V und 15V geregelt werden kann. Welcher Wert für den Vorwiderstand ist sinnvoll, wenn der Strom durch den Sensor höchstens 20 mA sein soll, ohne ihn zu zerstören? Zeichnen Sie das Schaltbild für diese Messung in ihr Protokollbuch. Schreiben Sie eine Tabelle in ihr Protokollbuch mit Spalten für U, I, P, R und T U I P=U*I R=U/I T [°C) Stellen Sie nun mindestens 5 verschiedene Werte für Strom und Spannung am Sensor ein, messen Sie beides. Tragen Sie die Werte in die Tabelle ein und bestimmen sie bei jeder Messung SOFORT P, R und T. T sollte nicht größer als etwa 40°C werden. Tragen Sie in ihrem Protokollbuch die jeweiligen Werte für P und T auf mm-Papier auf. Besteht ein linearer Zusammenhang? Zeichnen Sie eine interpolierende Gerade ein und bestimmen Sie daraus Rth. Wenn die T- Messung auf 0,2 K genau sein soll, wie groß darf dann der maximale Mess-Strom sein. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 8 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung Ist Ihre Dimensionierung aus der Vorbereitung jetzt noch sinnvoll oder müssen Sie sie ändern? 5.1.2 Aufbau des Meßsystems Bauen Sie nun die Brückenschaltung mit dem Verstärker auf. Überprüfen Sie, ob bei diesem System vernünftige Werte (z.B. für die Raumtemperatur, ihre eigene Hauttemperatur oder ähnliches) herauskommen. Dies ist vermutlich nicht der Fall. Die verwendeten Widerstände haben Toleranzen von etwa 5%. Daher ist eine gute Übereinstimmung auch nicht zu erwarten. Eine Lösung könnte sein, Bauelemente mit höherer Genauigkeit zu verwenden. Eine andere Lösung, die wir nutzen werden, ist das experimentelle Trimmen der wesentlichen Widerstände. 5.1.3 Trimmen der Widerstände und Kalibrieren In der Brücke wird ein Widerstand als Trimmer verwendet oder man benutzt ein Potentiometer. Dann wird so eingestellt, dass bei T=0°C die Brückenspannung gleich 0 ist. Der Pt100 wird dazu auf 0°C gekühlt. Dann wird der Trimmer eingestellt. Dabei sollten Sie berücksichtigen, dass es schwierig sein kann, mit dem Drehknopf den richtigen Wert einzustellen. Nehmen wir an, ein Wert zwischen 9 und 10 kOhm soll eingestellt werden. Dafür könnte man einen 10kOhm Trimmer nehmen. Oder man nimmt einen Festwiderstand von etwa 9 kOhm und einen 1 kOhm Trimmer. Mit der zweiten Lösung lässt sich der gewünschte Wert dann viel feinfühliger einstellen. Ähnlich kann auch ein Potentiometer mit hohem Widerstand durch zwei Festwiderstände und ein Potentiometer mit niedrigem Widerstand ersetzen. Die Verstärkung wird über die Widerstände R5 bzw. R4 eingestellt. Einer von beiden Widerständen muss daher variabel sein. Dann wird der Pt100 in ein Bad mit bekannter Temperatur, die mit einem Vergleichsthermometer gemessen wird, getaucht und die gewünschte Ausgangsspannung eingestellt. Überprüfen Sie, ob jetzt die Nullpunkteinstellung noch stimmt! Bei vielen Messsystemen muss der genaue Zusammenhang zwischen Messgröße und Ausgangsspannung kalibriert werden. Dazu wird mit einem Regler der Nullpunkt, hier die 0°C, eingestellt, mit einem zweiten Regler die Verstärkung. Bei Temperaturmessungen wird oft die Verstärkung bei 100°C geregelt. Aus Sicherheitsgründen wird bei diesem Versuch darauf verzichtet, mit kochendem Wasser zu hantieren. Daher stellen wir die Verstärkung bei einer Temperatur im Bereich 50 – 60 °C ein. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 9 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 5.1.4 Test Besorgen Sie sich mindestens sechsmal in einem Becherglas Wasser mit unterschiedlichen Temperaturen. Messen Sie die Wassertemperatur TM mit ihrem Aufbau und mit einem Vergleichsthermometer TR, dass Ihnen im Labor zur Verfügung gestellt wird. Tragen Sie die TM und TR in ihrem Protokollbuch in eine Tabelle ein und stellen Sie die Werte grafisch dar. Stellen Sie TM – TR als Funktion von TR grafisch dar. Wie groß sind die Abweichungen? Erreichen Sie die gewünschte Messgenauigkeit? 5.1.5 Messung der thermischen Zeitkonstante Wie schnell reagiert der Sensor auf Änderungen der Temperatur? Dies messen Sie jetzt. Dazu kühlen Sie den Sensor von Raumtemperatur auf 0°C ab (die Messung kann eigentlich mit jeder beliebigen Temperatur durchgeführt werden), und messen die vom Sensorsystem angezeigte Temperatur in Abhängigkeit von der Zeit. Da T (t ) T0 t 1 exp( ) ist und To die anfängliche Raumtemperatur T1 T0 und T1 die Temperatur des Bades von 0°C, gilt für T(t) in °C: T (t ) Raumtemperatur e t Zur Vorbereitung tauchen Sie jetzt den auf Raumtemperatur befindlichen Sensor in das Eisbad und messen Sie mit einer Uhr, wie lange es dauert, bis sich die Anzeige des Sensorsystems nicht mehr merklich ändert. Diese Zeit nennen wir TM. Sie kann in der Größenordnung von Minuten sein. Dann nehmen Sie den Sensor heraus und lassen ihn wieder auf Raumtemperatur kommen. Jetzt zur eigentlichen Messung: Tauchen Sie den Sensor wieder in das Eisbad und notieren Sie in einer Tabelle in ihrem Protokollbuch in gleichen Zeitabständen (etwa TM/10) Zeit und Temperaturanzeige des Sensors. Tragen Sie die Werte auf mm-Papier auf. Bestimmen Sie daraus die Zeitkonstante. Ziehen Sie dann den Sensor aus dem Eisbad, trocknen ihn ab und betrachten Sie nun den Temperaturanstieg. Erreicht der Sensor in Luft schneller oder langsamer die jeweilige Umgebungstemperatur als in Wasser? 5.2 Messung mit Thermoelementen. Es wird ein Thermoelement vom Typ K verwendet und ein Auswerte-IC von der Firma Analog Devices, der IC AD595. Ein Blockdiagramm zeigt die folgende Abbildung. Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 10 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung Diese IC ist so aufgebaut, dass er mit einem Typ K Element 10mV pro Grad Celsius als Ausgangsspannung erzeugt. In Figure 1 des angehängten Datenblattes sehen Sie, wie der IC beschaltet werden muss. 5.2.1 Messungen Schließen Sie das Thermoelement an den IC an. Zeichnen Sie das Schaltbild in ihr Protokollbuch. Besorgen Sie sich mindestens sechsmal in einem Becherglas Wasser mit unterschiedlichen Temperaturen. Messen Sie die Wassertemperatur TM mit ihrem Aufbau und mit einem Vergleichsthermometer TR, dass Ihnen im Labor zur Verfügung gestellt wird. Tragen Sie die TM und TR in ihrem Protokollbuch in eine Tabelle ein und stellen Sie die Werte grafisch dar. Stellen Sie TM – TR als Funktion von TR grafisch dar. Wie groß sind die Abweichungen? Erreichen Sie die gewünschte Messgenaugkeit? Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 11 von 12 05.12.2013 5:06 Praktikum Sensortechnik: Temperaturmessung 6 Hinweise zur Auswertung Die Vorbereitung steht im Protokollbuch. Dann protokollieren Sie während des Versuchs alle Ergebnisse, Berechnungen, Zwischenschritte und besonderen Vorkommnisse. Wenn sinnvoll, skizzieren Sie Bilder vom Oszilloskop. Nach dem Versuch werten Sie die Messungen aus, zeichnen die Kalibrier- und Abweichungskurven. Sie stellen fest, ob die gewünschte Messgenaugkeit erreicht wurde. Wenn nicht, diskutieren Sie mögliche Ursachen. Dann führen Sie eine einfache Kostenrechnung durch. Dazu stellen Sie für beide Systeme eine Stückliste der von Ihnen realisierten Schaltung auf und ermitteln die Preise. Abschließend geben Sie eine Empfehlung, welches Messsystem vermarktet werden soll. Anhang Datenblatt AD595 Thomas Rose TEMPERATUR13_01.DOC Version 18 vom Seite 12 von 12 05.12.2013 5:06 a Monolithic Thermocouple Amplifiers with Cold Junction Compensation AD594/AD595 FEATURES Pretrimmed for Type J (AD594) or Type K (AD595) Thermocouples Can Be Used with Type T Thermocouple Inputs Low Impedance Voltage Output: 10 mV/ⴗC Built-In Ice Point Compensation Wide Power Supply Range: +5 V to ⴞ15 V Low Power: <1 mW typical Thermocouple Failure Alarm Laser Wafer Trimmed to 1ⴗC Calibration Accuracy Setpoint Mode Operation Self-Contained Celsius Thermometer Operation High Impedance Differential Input Side-Brazed DIP or Low Cost Cerdip PRODUCT DESCRIPTION The AD594/AD595 is a complete instrumentation amplifier and thermocouple cold junction compensator on a monolithic chip. It combines an ice point reference with a precalibrated amplifier to produce a high level (10 mV/°C) output directly from a thermocouple signal. Pin-strapping options allow it to be used as a linear amplifier-compensator or as a switched output setpoint controller using either fixed or remote setpoint control. It can be used to amplify its compensation voltage directly, thereby converting it to a stand-alone Celsius transducer with a low impedance voltage output. FUNCTIONAL BLOCK DIAGRAM –IN 14 –ALM 13 +ALM 12 V+ 11 COMP 10 VO 9 FB 8 OVERLOAD DETECT AD594/AD595 +A ICE POINT COMP. –TC G G +TC 1 2 3 4 5 6 7 +IN +C +T COM –T –C V– are available at the package pins so that the circuit can be recalibrated for the thermocouple types by the addition of two or three resistors. These terminals also allow more precise calibration for both thermocouple and thermometer applications. The AD594/AD595 is available in two performance grades. The C and the A versions have calibration accuracies of ± 1°C and ± 3°C, respectively. Both are designed to be used from 0°C to +50°C, and are available in 14-pin, hermetically sealed, sidebrazed ceramic DIPs as well as low cost cerdip packages. PRODUCT HIGHLIGHTS The AD594/AD595 includes a thermocouple failure alarm that indicates if one or both thermocouple leads become open. The alarm output has a flexible format which includes TTL drive capability. 1. The AD594/AD595 provides cold junction compensation, amplification, and an output buffer in a single IC package. The AD594/AD595 can be powered from a single ended supply (including +5 V) and by including a negative supply, temperatures below 0°C can be measured. To minimize self-heating, an unloaded AD594/AD595 will typically operate with a total supply current 160 µA, but is also capable of delivering in excess of ± 5 mA to a load. 3. Flexible pinout provides for operation as a setpoint controller or a stand-alone temperature transducer calibrated in degrees Celsius. The AD594 is precalibrated by laser wafer trimming to match the characteristic of type J (iron-constantan) thermocouples and the AD595 is laser trimmed for type K (chromel-alumel) inputs. The temperature transducer voltages and gain control resistors 2. Compensation, zero, and scale factor are all precalibrated by laser wafer trimming (LWT) of each IC chip. 4. Operation at remote application sites is facilitated by low quiescent current and a wide supply voltage range +5 V to dual supplies spanning 30 V. 5. Differential input rejects common-mode noise voltage on the thermocouple leads. REV. C Information furnished by Analog Devices is believed to be accurate and reliable. However, no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties which may result from its use. No license is granted by implication or otherwise under any patent or patent rights of Analog Devices. One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A. Tel: 781/329-4700 World Wide Web Site: http://www.analog.com Fax: 781/326-8703 © Analog Devices, Inc., 1999 (@ +25ⴗC and VS = 5 V, Type J (AD594), Type K (AD595) Thermocouple, AD594/AD595–SPECIFICATIONS unless otherwise noted) Model AD594A Typ Max Min ABSOLUTE MAXIMUM RATING +VS to –V S Common-Mode Input Voltage Differential Input Voltage Alarm Voltages +ALM –ALM Operating Temperature Range Output Short Circuit to Common 36 +VS +VS –VS – 0.15 –VS –VS –VS –55 Indefinite –VS + 36 +VS +125 TEMPERATURE MEASUREMENT (Specified Temperature Range 0°C to +50°C) Calibration Error at +25°C1 Stability vs. Temperature 2 Gain Error Nominal Transfer Function AMPLIFIER CHARACTERISTICS Closed Loop Gain 3 Input Offset Voltage Input Bias Current Differential Input Range Common-Mode Range Common-Mode Sensitivity – RTO Power Supply Sensitivity – RTO Output Voltage Range Dual Supply Single Supply Usable Output Current4 3 dB Bandwidth ALARM CHARACTERISTICS VCE(SAT) at 2 mA Leakage Current Operating Voltage at – ALM Short Circuit Current POWER REQUIREMENTS Specified Performance Operating5 Quiescent Current (No Load) +VS –VS PACKAGE OPTION TO-116 (D-14) Cerdip (Q-14) AD594C Typ Max Min 36 +VS +VS –VS – 0.15 –VS –VS –VS –55 Indefinite –VS + 36 +VS +125 ⴞ3 ⴞ0.05 ⴞ1.5 10 193.4 (Temperature in °C) × 51.70 µV/°C 0.1 –10 +50 –VS – 0.15 –VS – 4 10 10 –VS + 2.5 0 ±5 15 +VS – 2 +VS – 2 193.4 (Temperature in °C) × 51.70 µV/°C 0.1 –VS –VS –55 Indefinite –VS + 36 +VS +125 –VS – 0.15 –VS – 4 10 10 –VS + 2.5 0 +VS – 2 –VS – 2 –VS + 2.5 0 ±5 15 0.3 ±5 15 20 AD594AD AD594AQ 160 100 AD594CD AD594CQ 300 AD595C Typ Max Units 36 +VS +VS Volts Volts Volts –VS + 36 +VS +125 Volts Volts °C ⴞ1 ⴞ0.025 ⴞ0.75 10 °C °C/°C % mV/°C –VS – 0.15 –VS –VS –VS –55 Indefinite 247.3 (Temperature in °C) × 40.44 µV/°C 0.1 –10 +50 –VS – 0.15 –VS – 4 10 10 –VS + 2.5 0 ±5 15 AD595AD AD595AQ ⴞ1 +VS – 4 20 +VS = 5, –VS = 0 +VS to –VS ≤ 30 160 100 +VS – 2 +VS – 2 0.3 ⴞ1 +VS – 4 20 +VS = 5, –VS = 0 +VS to –VS ≤ 30 300 +VS – 2 +VS + 2 0.3 ⴞ1 +VS – 4 20 Min ⴞ3 ⴞ0.05 ⴞ1.5 10 247.3 (Temperature in °C) × 40.44 µV/°C 0.1 –10 +50 –VS – 0.15 –VS – 4 10 10 ⴞ1 +VS – 4 160 100 36 +VS +VS –VS – 0.15 –VS ⴞ1 ⴞ0.025 ⴞ0.75 10 0.3 +VS = 5, –VS = 0 +VS to –VS ≤ 30 AD595A Typ Max Min +VS = 5, –VS = 0 +VS to –VS ≤ 30 300 160 100 µV µA mV Volts mV/V mV/V Volts Volts mA kHz Volts µA max Volts mA Volts Volts 300 µA µA AD595CD AD595CQ NOTES 1 Calibrated for minimum error at +25°C using a thermocouple sensitivity of 51.7 µV/°C. Since a J type thermocouple deviates from this straight line approximation, the AD594 will normally read 3.1 mV when the measuring junction is at 0°C. The AD595 will similarly read 2.7 mV at 0°C. 2 Defined as the slope of the line connecting the AD594/AD595 errors measured at 0°C and 50°C ambient temperature. 3 Pin 8 shorted to Pin 9. 4 Current Sink Capability in single supply configuration is limited to current drawn to ground through a 50 kΩ resistor at output voltages below 2.5 V. 5 –VS must not exceed –16.5 V. Specifications shown in boldface are tested on all production units at final electrical test. Results from those tests are used to calculate outgoing quality levels. All min and max specifications are guaranteed, although only those shown in boldface are tested on all production units. Specifications subject to change without notice. compensated signal, the following transfer functions should be used to determine the actual output voltages: AD594 output = (Type J Voltage + 16 µV) × 193.4 AD595 output = (Type K Voltage + 11 µV) × 247.3 or conversely: Type J voltage = (AD594 output/193.4) – 16 µV Type K voltage = (AD595 output/247.3) – 11 µV INTERPRETING AD594/AD595 OUTPUT VOLTAGES To achieve a temperature proportional output of 10 mV/°C and accurately compensate for the reference junction over the rated operating range of the circuit, the AD594/AD595 is gain trimmed to match the transfer characteristic of J and K type thermocouples at 25°C. For a type J output in this temperature range the TC is 51.70 µV/°C, while for a type K it is 40.44 µV/°C. The resulting gain for the AD594 is 193.4 (10 mV/°C divided by 51.7 µV/°C) and for the AD595 is 247.3 (10 mV/°C divided by 40.44 µV/°C). In addition, an absolute accuracy trim induces an input offset to the output amplifier characteristic of 16 µV for the AD594 and 11 µV for the AD595. This offset arises because the AD594/ AD595 is trimmed for a 250 mV output while applying a 25°C thermocouple input. Because a thermocouple output voltage is nonlinear with respect to temperature, and the AD594/AD595 linearly amplifies the Table I lists the ideal AD594/AD595 output voltages as a function of Celsius temperature for type J and K ANSI standard thermocouples, with the package and reference junction at 25°C. As is normally the case, these outputs are subject to calibration, gain and temperature sensitivity errors. Output values for intermediate temperatures can be interpolated, or calculated using the output equations and ANSI thermocouple voltage tables referred to zero degrees Celsius. Due to a slight variation in alloy content between ANSI type J and DIN FE-CUNI –2– REV. C AD594/AD595 Table I. Output Voltage vs. Thermocouple Temperature (Ambient +25°C, VS = –5 V, +15 V) Thermocouple Temperature °C Type J Voltage mV AD594 Output mV Type K Voltage mV AD595 Output mV –200 –180 –160 –140 –120 –7.890 –7.402 –6.821 –6.159 –5.426 –1523 –1428 –1316 –1188 –1046 –5.891 –5.550 –5.141 –4.669 –4.138 –1454 –1370 –1269 –1152 –1021 –100 –80 –60 –40 –20 –4.632 –3.785 –2.892 –1.960 –.995 –893 –729 –556 –376 –189 –3.553 –2.920 –2.243 –1.527 –.777 –10 0 10 20 25 –.501 0 .507 1.019 1.277 –94 3.1 101 200 250 30 40 50 60 80 1.536 2.058 2.585 3.115 4.186 100 120 140 160 180 Type J Voltage mV AD594 Output mV Type K Voltage mV AD595 Output mV 500 520 540 560 580 27.388 28.511 29.642 30.782 31.933 5300 5517 5736 5956 6179 20.640 21.493 22.346 23.198 24.050 5107 5318 5529 5740 5950 –876 –719 –552 –375 –189 600 620 640 660 680 33.096 34.273 35.464 36.671 37.893 6404 6632 6862 7095 7332 24.902 25.751 26.599 27.445 28.288 6161 6371 6581 6790 6998 –.392 0 .397 .798 1.000 –94 2.7 101 200 250 700 720 740 750 760 39.130 40.382 41.647 42.283 – 7571 7813 8058 8181 – 29.128 29.965 30.799 31.214 31.629 7206 7413 7619 7722 7825 300 401 503 606 813 1.203 1.611 2.022 2.436 3.266 300 401 503 605 810 780 800 820 840 860 – – – – – – – – – – 32.455 33.277 34.095 34.909 35.718 8029 8232 8434 8636 8836 5.268 6.359 7.457 8.560 9.667 1022 1233 1445 1659 1873 4.095 4.919 5.733 6.539 7.338 1015 1219 1420 1620 1817 880 900 920 940 960 – – – – – – – – – – 36.524 37.325 38.122 38.915 39.703 9035 9233 9430 9626 9821 200 220 240 260 280 10.777 11.887 12.998 14.108 15.217 2087 2302 2517 2732 2946 8.137 8.938 9.745 10.560 11.381 2015 2213 2413 2614 2817 980 1000 1020 1040 1060 – – – – – – – – – – 40.488 41.269 42.045 42.817 43.585 10015 10209 10400 10591 10781 300 320 340 360 380 16.325 17.432 18.537 19.640 20.743 3160 3374 3588 3801 4015 12.207 13.039 13.874 14.712 15.552 3022 3227 3434 3641 3849 1080 1100 1120 1140 1160 – – – – – – – – – – 44.439 45.108 45.863 46.612 47.356 10970 11158 11345 11530 11714 400 420 440 460 480 21.846 22.949 24.054 25.161 26.272 4228 4441 4655 4869 5084 16.395 17.241 18.088 18.938 19.788 4057 4266 4476 4686 4896 1180 1200 1220 1240 1250 – – – – – – – – – – 48.095 48.828 49.555 50.276 50.633 11897 12078 12258 12436 12524 thermocouples Table I should not be used in conjunction with European standard thermocouples. Instead the transfer function given previously and a DIN thermocouple table should be used. ANSI type K and DIN NICR-NI thermocouples are composed CONSTANTAN (ALUMEL) +5V 10mV/8C Thermocouple Temperature °C SINGLE AND DUAL SUPPLY CONNECTIONS The AD594/AD595 is a completely self-contained thermocouple conditioner. Using a single +5 V supply the interconnections shown in Figure 1 will provide a direct output from a type J thermocouple (AD594) or type K thermocouple (AD595) measuring from 0°C to +300°C. Figure 1. Basic Connection, Single Supply Operation Any convenient supply voltage from +5 V to +30 V may be used, with self-heating errors being minimized at lower supply levels. In the single supply configuration the +5 V supply connects to Pin 11 with the V– connection at Pin 7 strapped to power and signal common at Pin 4. The thermocouple wire inputs connect to Pins 1 and 14 either directly from the measuring point or through intervening connections of similar thermocouple wire type. When the alarm output at Pin 13 is not used it should be connected to common or –V. The precalibrated feedback network at Pin 8 is tied to the output at Pin 9 to provide a 10 mV/°C nominal temperature transfer characteristic. of identical alloys and exhibit similar behavior. The upper temperature limits in Table I are those recommended for type J and type K thermocouples by the majority of vendors. By using a wider ranging dual supply, as shown in Figure 2, the AD594/AD595 can be interfaced to thermocouples measuring both negative and extended positive temperatures. 13 14 12 11 10 9 8 OVERLOAD DETECT AD594/ AD595 +A G G +TC IRON (CHROMEL) 1 2 3 4 5 ICE POINT COMP. –TC 6 7 COMMON REV. C –3– AD594/AD595 The printed circuit board layout shown also provides for placement of optional alarm load resistors, recalibration resistors and a compensation capacitor to limit bandwidth. +5V TO +30V CONSTANTAN (ALUMEL) 14 13 12 11 9 10 8 OVERLOAD DETECT AD594/ AD595 G G +TC IRON (CHROMEL) 1 2 To ensure secure bonding the thermocouple wire should be cleaned to remove oxidation prior to soldering. Noncorrosive rosin flux is effective with iron, constantan, chromel and alumel and the following solders: 95% tin-5% antimony, 95% tin-5% silver or 90% tin-10% lead. +A 3 4 5 ICE POINT –TC COMP. 6 SPAN OF 5V TO 30V 7 FUNCTIONAL DESCRIPTION The AD594 behaves like two differential amplifiers. The outputs are summed and used to control a high gain amplifier, as shown in Figure 4. COMMON 0V TO –25V Figure 2. Dual Supply Operation –IN 14 With a negative supply the output can indicate negative temperatures and drive grounded loads or loads returned to positive voltages. Increasing the positive supply from 5 V to 15 V extends the output voltage range well beyond the 750°C temperature limit recommended for type J thermocouples (AD594) and the 1250°C for type K thermocouples (AD595). G +C –IN +ALM –ALM COMMON –T –C V– 8 VOUT +A ICE POINT COMP. –TC G 1 2 3 4 5 6 7 +IN +C +T COM –T –C V– In addition to the feedback signal, a cold junction compensation voltage is applied to the right-hand differential amplifier. The compensation is a differential voltage proportional to the Celsius temperature of the AD594/AD595. This signal disturbs the differential input so that the amplifier output must adjust to restore the input to equal the applied thermocouple voltage. COMP 7 FB 8 In normal operation the main amplifier output, at Pin 9, is connected to the feedback network, at Pin 8. Thermocouple signals applied to the floating input stage, at Pins 1 and 14, are amplified by gain G of the differential amplifier and are then further amplified by gain A in the main amplifier. The output of the main amplifier is fed back to a second differential stage in an inverting connection. The feedback signal is amplified by this stage and is also applied to the main amplifier input through a summing circuit. Because of the inversion, the amplifier causes the feedback to be driven to reduce this difference signal to a small value. The two differential amplifiers are made to match and have identical gains, G. As a result, the feedback signal that must be applied to the right-hand differential amplifier will precisely match the thermocouple input signal when the difference signal has been reduced to zero. The feedback network is trimmed so that the effective gain to the output, at Pins 8 and 9, results in a voltage of 10 mV/°C of thermocouple excitation. CONSTANTAN (ALUMEL) 14 VO 9 Figure 4. AD594/AD595 Block Diagram A method that provides for thermal equilibrium is the printed circuit board connection layout illustrated in Figure 3. 1 COMP 10 +TC The isothermal terminating connections of a pair of thermocouple wires forms an effective reference junction. This junction must be kept at the same temperature as the AD594/AD595 for the internal cold junction compensation to be effective. +IN V+ 11 AD594/AD595 THERMOCOUPLE CONNECTIONS +T +ALM 12 OVERLOAD DETECT Common-mode voltages on the thermocouple inputs must remain within the common-mode range of the AD594/AD595, with a return path provided for the bias currents. If the thermocouple is not remotely grounded, then the dotted line connections in Figures 1 and 2 are recommended. A resistor may be needed in this connection to assure that common-mode voltages induced in the thermocouple loop are not converted to normal mode. IRON (CHROMEL) –ALM 13 The compensation is applied through the gain scaling resistors so that its effect on the main output is also 10 mV/°C. As a result, the compensation voltage adds to the effect of the thermocouple voltage a signal directly proportional to the difference between 0°C and the AD594/AD595 temperature. If the thermocouple reference junction is maintained at the AD594/AD595 temperature, the output of the AD594/AD595 will correspond to the reading that would have been obtained from amplification of a signal from a thermocouple referenced to an ice bath. V+ Figure 3. PCB Connections Here the AD594/AD595 package temperature and circuit board are thermally contacted in the copper printed circuit board tracks under Pins 1 and 14. The reference junction is now composed of a copper-constantan (or copper-alumel) connection and copper-iron (or copper-chromel) connection, both of which are at the same temperature as the AD594/AD595. –4– REV. C AD594/AD595 The AD594/AD595 also includes an input open circuit detector that switches on an alarm transistor. This transistor is actually a current-limited output buffer, but can be used up to the limit as a switch transistor for either pull-up or pull-down operation of external alarms. The ice point compensation network has voltages available with positive and negative temperature coefficients. These voltages may be used with external resistors to modify the ice point compensation and recalibrate the AD594/AD595 as described in the next column. The feedback resistor is separately pinned out so that its value can be padded with a series resistor, or replaced with an external resistor between Pins 5 and 9. External availability of the feedback resistor allows gain to be adjusted, and also permits the AD594/ AD595 to operate in a switching mode for setpoint operation. CAUTIONS: The temperature compensation terminals (+C and –C) at Pins 2 and 6 are provided to supply small calibration currents only. The AD594/AD595 may be permanently damaged if they are grounded or connected to a low impedance. The AD594/AD595 is internally frequency compensated for feedback ratios (corresponding to normal signal gain) of 75 or more. If a lower gain is desired, additional frequency compensation should be added in the form of a 300 pF capacitor from Pin 10 to the output at Pin 9. As shown in Figure 5 an additional 0.01 µF capacitor between Pins 10 and 11 is recommended. AD594/ AD595 VO 9 300pF COMP 10 0.01mF +V 11 Figure 5. Low Gain Frequency Compensation RECALIBRATION PRINCIPLES AND LIMITATIONS The ice point compensation network of the AD594/AD595 produces a differential signal which is zero at 0°C and corresponds to the output of an ice referenced thermocouple at the temperature of the chip. The positive TC output of the circuit is proportional to Kelvin temperature and appears as a voltage at +T. It is possible to decrease this signal by loading it with a resistor from +T to COM, or increase it with a pull-up resistor from +T to the larger positive TC voltage at +C. Note that adjustments to +T should be made by measuring the voltage which tracks it at –T. To avoid destabilizing the feedback amplifier the measuring instrument should be isolated by a few thousand ohms in series with the lead connected to –T. 1 +IN +T 3 this terminal can be produced with a resistor between –C and –T to balance an increase in +T, or a resistor from –T to COM to offset a decrease in +T. If the compensation is adjusted substantially to accommodate a different thermocouple type, its effect on the final output voltage will increase or decrease in proportion. To restore the nominal output to 10 mV/°C the gain may be adjusted to match the new compensation and thermocouple input characteristics. When reducing the compensation the resistance between –T and COM automatically increases the gain to within 0.5% of the correct value. If a smaller gain is required, however, the nominal 47 kΩ internal feedback resistor can be paralleled or replaced with an external resistor. Fine calibration adjustments will require temperature response measurements of individual devices to assure accuracy. Major reconfigurations for other thermocouple types can be achieved without seriously compromising initial calibration accuracy, so long as the procedure is done at a fixed temperature using the factory calibration as a reference. It should be noted that intermediate recalibration conditions may require the use of a negative supply. EXAMPLE: TYPE E RECALIBRATION—AD594/AD595 Both the AD594 and AD595 can be configured to condition the output of a type E (chromel-constantan) thermocouple. Temperature characteristics of type E thermocouples differ less from type J, than from type K, therefore the AD594 is preferred for recalibration. While maintaining the device at a constant temperature follow the recalibration steps given here. First, measure the device temperature by tying both inputs to common (or a selected common-mode potential) and connecting FB to VO. The AD594 is now in the stand alone Celsius thermometer mode. For this example assume the ambient is 24°C and the initial output VO is 240 mV. Check the output at VO to verify that it corresponds to the temperature of the device. Next, measure the voltage –T at Pin 5 with a high impedance DVM (capacitance should be isolated by a few thousand ohms of resistance at the measured terminals). At 24°C the –T voltage will be about 8.3 mV. To adjust the compensation of an AD594 to a type E thermocouple a resistor, R1, should be connected between +T and +C, Pins 2 and 3, to raise the voltage at –T by the ratio of thermocouple sensitivities. The ratio for converting a type J device to a type E characteristic is: r (AD594) =(60.9 µV/°C)/(51.7 µV/°C)= 1.18 Thus, multiply the initial voltage measured at –T by r and experimentally determine the R1 value required to raise –T to that level. For the example the new –T voltage should be about 9.8 mV. The resistance value should be approximately 1.8 kΩ. Figure 6. Decreased Sensitivity Adjustment The zero differential point must now be shifted back to 0°C. This is accomplished by multiplying the original output voltage VO by r and adjusting the measured output voltage to this value by experimentally adding a resistor, R2, between –C and –T, Pins 5 and 6. The target output value in this case should be about 283 mV. The resistance value of R2 should be approximately 240 kΩ. Changing the positive TC half of the differential output of the compensation scheme shifts the zero point away from 0°C. The zero can be restored by adjusting the current flow into the negative input of the feedback amplifier, the –T pin. A current into Finally, the gain must be recalibrated such that the output VO indicates the device’s temperature once again. Do this by adding a third resistor, R3, between FB and –T, Pins 8 and 5. VO should now be back to the initial 240 mV reading. The resistance value 14 –IN AD594/ AD595 COM 4 8 FB 9 REV. C VO –T 5 –5– AD594/AD595 of R3 should be approximately 280 kΩ. The final connection diagram is shown in Figure 7. An approximate verification of the effectiveness of recalibration is to measure the differential gain to the output. For type E it should be 164.2. 1 +IN THERMAL ENVIRONMENT EFFECTS The inherent low power dissipation of the AD594/AD595 and the low thermal resistance of the package make self-heating errors almost negligible. For example, in still air the chip to ambient thermal resistance is about 80°C/watt (for the D package). At the nominal dissipation of 800 µW the self-heating in free air is less than 0.065°C. Submerged in fluorinert liquid (unstirred) the thermal resistance is about 40°C/watt, resulting in a selfheating error of about 0.032°C. COM 4 14 –IN +T 3 AD594/ AD595 R1 +C 2 SETPOINT CONTROLLER The AD594/AD595 can readily be connected as a setpoint controller as shown in Figure 9. –C 6 9 VO R2 –T 8 FB 5 HEATER DRIVER R3 CONSTANTAN HEATER (ALUMEL) Figure 7. Type E Recalibration When implementing a similar recalibration procedure for the AD595 the values for R1, R2, R3 and r will be approximately 650 Ω, 84 kΩ, 93 kΩ and 1.51, respectively. Power consumption will increase by about 50% when using the AD595 with type E inputs. SETPOINT VOLTAGE INPUT +5V 14 13 12 11 10 9 8 20MV (OPTIONAL) FOR HYSTERESIS OVERLOAD DETECT AD594/ AD595 +A G G +TC Note that during this procedure it is crucial to maintain the AD594/AD595 at a stable temperature because it is used as the temperature reference. Contact with fingers or any tools not at ambient temperature will quickly produce errors. Radiational heating from a change in lighting or approach of a soldering iron must also be guarded against. IRON (CHROMEL) TEMPERATURE CONTROLLED REGION 1 2 3 4 5 ICE POINT –TC COMP. 6 7 COMMON Figure 9. Setpoint Controller The thermocouple is used to sense the unknown temperature and provide a thermal EMF to the input of the AD594/AD595. The signal is cold junction compensated, amplified to 10 mV/°C and compared to an external setpoint voltage applied by the user to the feedback at Pin 8. Table I lists the correspondence between setpoint voltage and temperature, accounting for the nonlinearity of the measurement thermocouple. If the setpoint temperature range is within the operating range (–55°C to +125°C) of the AD594/AD595, the chip can be used as the transducer for the circuit by shorting the inputs together and utilizing the nominal calibration of 10 mV/°C. This is the centigrade thermometer configuration as shown in Figure 13. USING TYPE T THERMOCOUPLES WITH THE AD595 Because of the similarity of thermal EMFs in the 0°C to +50°C range between type K and type T thermocouples, the AD595 can be directly used with both types of inputs. Within this ambient temperature range the AD595 should exhibit no more than an additional 0.2°C output calibration error when used with type T inputs. The error arises because the ice point compensator is trimmed to type K characteristics at 25°C. To calculate the AD595 output values over the recommended –200°C to +350°C range for type T thermocouples, simply use the ANSI thermocouple voltages referred to 0°C and the output equation given on page 2 for the AD595. Because of the relatively large nonlinearities associated with type T thermocouples the output will deviate widely from the nominal 10 mV/°C. However, cold junction compensation over the rated 0°C to +50°C ambient will remain accurate. In operation if the setpoint voltage is above the voltage corresponding to the temperature being measured the output swings low to approximately zero volts. Conversely, when the temperature rises above the setpoint voltage the output switches to the positive limit of about 4 volts with a +5 V supply. Figure 9 shows the setpoint comparator configuration complete with a heater element driver circuit being controlled by the AD594/ AD595 toggled output. Hysteresis can be introduced by injecting a current into the positive input of the feedback amplifier when the output is toggled high. With an AD594 about 200 nA into the +T terminal provides 1°C of hysteresis. When using a single 5 V supply with an AD594, a 20 MΩ resistor from VO to +T will supply the 200 nA of current when the output is forced high (about 4 V). To widen the hysteresis band decrease the resistance connected from VO to +T. STABILITY OVER TEMPERATURE Each AD594/AD595 is tested for error over temperature with the measuring thermocouple at 0°C. The combined effects of cold junction compensation error, amplifier offset drift and gain error determine the stability of the AD594/AD595 output over the rated ambient temperature range. Figure 8 shows an AD594/ AD595 drift error envelope. The slope of this figure has units of °C/°C. +0.68C DRIFT ERROR LOW = > T < SETPOINT HIGH = > T > SETPOINT TEMPERATURE COMPARATOR OUT 0 258C –0.68C 508C TEMPERATURE OF AD594C/AD595C Figure 8. Drift Error vs. Temperature –6– REV. C AD594/AD595 ALARM CIRCUIT In all applications of the AD594/AD595 the –ALM connection, Pin 13, should be constrained so that it is not more positive than (V+) – 4 V. This can be most easily achieved by connecting Pin 13 to either common at Pin 4 or V– at Pin 7. For most applications that use the alarm signal, Pin 13 will be grounded and the signal will be taken from +ALM on Pin 12. A typical application is shown in Figure 10. The alarm can be used with both single and dual supplies. It can be operated above or below ground. The collector and emitter of the output transistor can be used in any normal switch configuration. As an example a negative referenced load can be driven from –ALM as shown in Figure 12. +10V CONSTANTAN (ALUMEL) 14 In this configuration the alarm transistor will be off in normal operation and the 20 k pull up will cause the +ALM output on Pin 12 to go high. If one or both of the thermocouple leads are interrupted, the +ALM pin will be driven low. As shown in Figure 10 this signal is compatible with the input of a TTL gate which can be used as a buffer and/or inverter. 13 12 11 10 9 8 AD594/ AD595 +A G G +TC IRON (CHROMEL) 1 2 3 4 5 ICE POINT –TC COMP. 6 7 +5V 20kV 13 14 12 11 9 10 GND ALARM TTL GATE ALARM OUT CONSTANTAN (ALUMEL) 10mV/8C OVERLOAD DETECT ALARM RELAY 10mV/8C 8 –12V OVERLOAD DETECT AD594/ AD595 Figure 12. –ALM Driving A Negative Referenced Load +A G G +TC IRON (CHROMEL) 1 2 3 4 5 ICE POINT –TC COMP. 6 7 GND Figure 10. Using the Alarm to Drive a TTL Gate (“Grounded’’ Emitter Configuration) Since the alarm is a high level output it may be used to directly drive an LED or other indicator as shown in Figure 11. V+ LED CONSTANTAN (ALUMEL) 13 Additionally, the AD594/AD595 can be configured to produce an extreme upscale or downscale output in applications where an extra signal line for an alarm is inappropriate. By tying either of the thermocouple inputs to common most runaway control conditions can be automatically avoided. A +IN to common connection creates a downscale output if the thermocouple opens, while connecting –IN to common provides an upscale output. CELSIUS THERMOMETER 270V 14 The collector (+ALM) should not be allowed to become more positive than (V–) +36 V, however, it may be permitted to be more positive than V+. The emitter voltage (–ALM) should be constrained so that it does not become more positive than 4 volts below the V+ applied to the circuit. 10mV/8C 12 11 10 9 8 The AD594/AD595 may be configured as a stand-alone Celsius thermometer as shown in Figure 13. OVERLOAD DETECT AD594/ AD595 14 G G +TC IRON (CHROMEL) 1 2 +5V TO +15V +A 3 4 5 12 11 9 8 AD594/ AD595 +A 7 G G COMMON +TC Figure 11. Alarm Directly Drives LED A 270 Ω series resistor will limit current in the LED to 10 mA, but may be omitted since the alarm output transistor is current limited at about 20 mA. The transistor, however, will operate in a high dissipation mode and the temperature of the circuit will rise well above ambient. Note that the cold junction compensation will be affected whenever the alarm circuit is activated. The time required for the chip to return to ambient temperature will depend on the power dissipation of the alarm circuit, the nature of the thermal path to the environment and the alarm duration. REV. C 10 OVERLOAD DETECT ICE POINT –TC COMP. 6 13 OUTPUT 10mV/8C 1 2 3 4 5 ICE POINT –TC COMP. 6 7 GND 0 TO –15V Figure 13. AD594/AD595 as a Stand-Alone Celsius Thermometer Simply omit the thermocouple and connect the inputs (Pins 1 and 14) to common. The output now will reflect the compensation voltage and hence will indicate the AD594/AD595 temperature with a scale factor of 10 mV/°C. In this three terminal, voltage output, temperature sensing mode, the AD594/ AD595 will operate over the full military –55°C to +125°C temperature range. –7– AD594/AD595 and to arrange its output voltage so that it corresponds to a thermocouple referred to 0°C. This voltage is simply added to the thermocouple voltage and the sum then corresponds to the standard voltage tabulated for an ice-point referenced thermocouple. Thermocouples are economical and rugged; they have reasonably good long-term stability. Because of their small size, they respond quickly and are good choices where fast response is important. They function over temperature ranges from cryogenics to jet-engine exhaust and have reasonable linearity and accuracy. V1' Because the number of free electrons in a piece of metal depends on both temperature and composition of the metal, two pieces of dissimilar metal in isothermal and contact will exhibit a potential difference that is a repeatable function of temperature, as shown in Figure 14. The resulting voltage depends on the temperatures, T1 and T2, in a repeatable way. Cu CONSTANTAN V1' = V1 FOR PROPERLY SCALED V3' = f(T3) V1 C731g–0–11/99 THERMOCOUPLE BASICS Cu CuNi– V2 T3 V3' T1 V1 IRON Cu CONSTANTAN Figure 15. Substitution of Measured Reference Temperature for Ice Point Reference Cu CONSTANTAN T2 T1 The temperature sensitivity of silicon integrated circuit transistors is quite predictable and repeatable. This sensitivity is exploited in the AD594/AD595 to produce a temperature related voltage to compensate the reference of “cold” junction of a thermocouple as shown in Figure 16. IRON ICE POINT REFERENCE UNKNOWN TEMPERATURE Figure 14. Thermocouple Voltage with 0°C Reference Since the thermocouple is basically a differential rather than absolute measuring device, a know reference temperature is required for one of the junctions if the temperature of the other is to be inferred from the output voltage. Thermocouples made of specially selected materials have been exhaustively characterized in terms of voltage versus temperature compared to primary temperature standards. Most notably the water-ice point of 0°C is used for tables of standard thermocouple performance. T3 CONSTANTAN T1 An alternative measurement technique, illustrated in Figure 15, is used in most practical applications where accuracy requirements do not warrant maintenance of primary standards. The reference junction temperature is allowed to change with the environment of the measurement system, but it is carefully measured by some type of absolute thermometer. A measurement of the thermocouple voltage combined with a knowledge of the reference temperature can be used to calculate the measurement junction temperature. Usual practice, however, is to use a convenient thermoelectric method to measure the reference temperature Cu IRON Cu Figure 16. Connecting Isothermal Junctions Since the compensation is at the reference junction temperature, it is often convenient to form the reference “junction” by connecting directly to the circuit wiring. So long as these connections and the compensation are at the same temperature no error will result. OUTLINE DIMENSIONS Dimensions shown in inches and (mm). Cerdip (Q) Package 0.77 ±0.015 (19.55 ±0.39) 0.430 (10.92) 0.040 (1.02) R 14 8 0.265 0.290 ±0.010 (6.73) (7.37 ±0.25) 1 14 8 0.260 ±0.020 (6.6 ±0.51) 0.310 (7.87) 7 1 PIN 1 0.31 ±0.01 (7.87 ±0.25) 0.700 ±0.010 (17.78 ±0.25) 0.035 ±0.010 (0.89 ±0.25) ( 7 PIN 1 0.095 (2.41) 0.085 (2.16) 0.125 (3.18) MIN 0.047 ±0.007 +0.003 0.100 (1.19 ±0.18) 0.017 –0.002 (2.54) BSC 0.43 +0.08 –0.05 PRINTED IN U.S.A. TO-116 (D) Package 0.180 ±0.030 (4.57 ±0.76) 0.035 ±0.010 (0.889 ±0.254) 0.032 (0.812) 0.30 (7.62) REF 0.018 (0.457) 0.600 (15.24) BSC ( –8– 0.148 ±0.015 (3.76 ±0.38) 0.180 ±0.030 (4.57 ±0.76) 0.125 3.175) MIN 0.01 ±0.002 (0.25 ±0.05) 0.300 (7.62) REF SEATING PLANE 0.100 (2.54) BSC 15° 0° 0.010 ±0.001 (0.254 ±0.025) REV. C Praktikum Sensortechnik Drehzahlmessung Szenario In vielen Bereichen der Technik müssen Drehzahlen gemessen werden. So sind im Automobil die Drehzahl der Kurbelwelle für die Motorsteuerung oder die der Räder für ABS, ESP usw. von Interesse. Oft wird die Drehzahl mit induktiven Sensoren erfasst. Dabei wird eine Spule mit einem Permanentmagneten als Sensor einem Zahnrad gegenübergestellt. Jeder Zahn erzeugt dann beim Vorbeilauf einen Spannungspuls. Eine andere Methode benutzt Feldplatten. Dies sind bekanntlich Sensoren, deren Widerstand magnetfeldabhängig ist. Wir benutzten einen Sensor, der zwei Feldplatten in Reihe und einen Magneten enthält. Bewegt sich ein Zahnrad vorbei, werden die Magnetfelder in den Feldplatten geändert, die Ausgangsspannung ändert sich. Feldplatten haben den Vorzug, dass sie auch bei langsamer Bewegung noch auswertbare Signale liefern. Allerdings sind sie teurer. Ihre Aufgabe ist es nun, für eine solche Differentialfeldplatte eine Auswerteelektronik aufzubauen, mit der die Drehzahl eines Motors gemessen werden kann. Dazu muss man mit einer Analogelektronik die Spannungsänderungen in Rechteckpulse umwandeln, die dann mit einem digitalen Zähler gezählt werden. Die Grundlage für die Analogelektronik findet sich in dieser Anleitung, die Digitalschaltung entwerfen Sie selbst in der Vorbereitung. Praktikum Sensortechnik: Drehzahlmessung Ziel dieses Versuches Die Anwendung von Feldplatten zur Drehzahlmessung verstehen und ein komplettes Sensorsystem aufbauen können. Inhalte Aufbau einer analogen und digitalen Signalverarbeitung, Test, Aufnahme einer Motorkennlinie Vorkenntnisse: Magnetfeldmessung mit Hall-Sonde und Feldplatte, Aufbau und Funktion der Sensoren, Brückenschaltung, OP in Komparatorschaltung, digitale Zähler, Auswertung siehe letztes Kapitel der Anleitung benötigte Hilfsmittel Protokollbuch (DIN A 5-, besser DIN A4-Kladde, kariert), Rechner, Millimeterpapier Anhang: Schmitt-Trigger, Logik-Bausteine Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 2 von 14 1 Einleitung In diesem Versuch sollen Sie lernen, mit Hilfe von Sensorelementen und analogen und digitalen Bauelementen ein komplettes kleines Sensorsystem zu errichten. Sie werden die Drehzahl eines Motors sensorisch erfassen und anzeigen. Dazu müssen Sie in der Vorbereitung insbesondere einen digitalen Zähler entwerfen, der für eine Sekunde Pulse zählt, diese in der zweiten Sekunde anzeigt und in der dritten Sekunde zurückgesetzt wird. Dies ist ein Versuch, in dem Kenntnisse der analogen und digitalen Schaltungstechnik absolut notwendig sind. Praktikum Sensortechnik: Drehzahlmessung 2 Theoretische Grundlagen 2.1 Sensorik Auf der Motorachse befindet sich ein Zahnrad mit 40 Zähnen. Möglichst nahe am Zahnrad wird der Sensor montiert. Der Magnetfeldsensor Feldplatten. besteht aus zwei in Reihe geschalteten Bewegt sich ein Zahn an den beiden Sensoren vorbei, ändern sich die Widerstände der beiden Feldplatten. Wie auch in der Vorlesung gezeigt, ergibt sich für die Spannung an der Feldplatte MR2 der in der nächsten Abb. gezeigte Verlauf. Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 4 von 14 Praktikum Sensortechnik: Drehzahlmessung Diese Ausgangsspannung schwankt um etwa die halbe Versorgungsspannung. Die Pulse lassen sich besser zählen, wenn die Spannungen um 0V schwanken. Daher wird die Ausgangsspannung des Sensors in einer Messbrücke ausgelesen. 2.2 Analogelektronik In der nächsten Abbildung ist eine typische Auswerteschaltung gezeigt. Sie sehen, dass beim OP der Ausgang auf den + Eingang geführt wird. Dann arbeitet die Schaltung nicht als Verstärker, sondern als Schmitt-Trigger. Beim Überschreiten einer durch die Widerstände einstellbaren Schwelle springt die Ausgangsspannung auf den minimalen Wert, bei Unterschreiten einer anderen Schwelle auf den Maximalwert. Näheres findet man im Anhang. Diese OP-Ausgangsspannung wird dann auf den pnpTransistorschalter geführt. Den brauchen wir nicht. Also haben wir nebenstehenden Aufbau: Die beiden Kondensatoren können wichtig sein, um externe Störungen zu unterdrücken. Die Brückenspannung wird also auf den Schmitt-Trigger gegeben. Damit wird dann ein Rechtecksignal erzeugt, das etwa zwischen der positiven und negativen Betriebsspannung des OP schwankt. Daraus muss noch ein logisches TTL-Signal erzeugt werden. Das erreicht man beispielsweise, indem ein npn-Transistorschalter mit dem OP-Ausgang geschaltet wird. Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 5 von 14 Praktikum Sensortechnik: Drehzahlmessung Dazu nehmen wir einen npn-Transistor, der mit 5 V betrieben wird. Der Kollektorwiderstand ist beispielsweise 1 kOhm, der Basiswiderstand 47 kOhm. Das Ausgangssignal ist die Kollektorspannung. So erhält man schon ein logisches Ausgangssignal, das jetzt noch gezählt werden muss. 2.3 Digitalelektronik Dazu bauen Sie einen entsprechenden Zähler auf. Dieser hat 2 wesentliche Bestandteile. Zum Einen die eigentliche Zählschaltung. Diese bauen wir aus zwei 4-Bit Countern auf, die in Reihe geschaltet werden. Die Ausgänge der Counter werden jeweils auf eine 7-Segment-Anzeige (LED Display) gegeben. Diese Bausteine kennen Sie noch aus dem AD-Praktikum. Zur Erinnerung sind sie im Anhang nochmals dargestellt. Sie werden folgendermaßen angesteuert: 4-Bit-Counter: wird mit R=0 auf 0 zurückgesetzt, eine andere Möglichkeit bietet der E-Eingang. Mit E=0 wird der Zähler auf den Stand gesetzt, der an den linken Dateneingängen anliegt. LED-Display: bei E=0 wird das an den Eingängen anliegende Bitmuster angezeigt, bei E=1 bleibt das vorher angezeigte Zeichen gespeichert. Da diese Zählschaltung einfach alle Pulse zählt, die im Laufe der Zeit angelegt werden, brauchen wir zum Anderen also noch eine Steuerschaltung. Die soll dafür sorgen, dass die Pulse 1 Sekunde lang gezählt werden, dann wird in der nächsten Sekunde die Pulsanzahl angezeigt und in der dritten Sekunde werden die Zähler zurückgesetzt. Wir benötigen also 3 Zustände: Zählen, Anzeigen, Rücksetzen. Sie werden mit einem synchronen mod 3-Zähler aus flankengetriggerten D-Flipflops erzeugt. Diese stecken, wie aus dem ADT Praktikum bekannt, in den 4 Bit-Register-Bausteinen. Wie müssen nun die Ausgänge dieses Steuerzählers mit den Steuereingängen des Frequenzzählers verbunden werden? Beim Frequenzzähler benötigen wir den Eingang E des LEDDisplays und den R-Eingang des 4-Bit Counters. Im Takt 0 soll gezählt und aktiv angezeigt werden, im Takt 1 und 2 wird das letzte Zählergebnis aus Takt 0 angezeigt und bei Takt 3 wird der Zähler zurückgesetzt. Damit ergibt sich folgender Zusammenhang: Takt Q1 Q0 Funktion E R 0 0 0 Zählen 0 1 1 0 1 Anzeigen 1 1 2 1 0 Rücksetzen 1 0 Alternative: Wir codieren die 3 Zustände 0, 1, 2, direkt mit den gewünschten Pegeln für E und R. Wir identifizieren den Ausgang des D-FFs 0, Q0, mit R und den des D-FF-1, Q1, mit E, und die jeweiligen Eingänge mit D1 und D0. Im typischen Bild eines synchronen Zählers benötigt man also 2 D-FFs. Da die Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 6 von 14 Praktikum Sensortechnik: Drehzahlmessung Zustandsfolge einfach 0 – 1 – 2 – 0 ist, sollen folgende Zustände aufeinander folgen (E=0, R=1) - (E=1, R=1) - (E=1, R=0) - (E=0, R=1) Dies ergibt für die Logik folgende Tabelle: Takt Funktion 0 1 2 Zählen Anzeigen Rücksetzen E =Q1 0 1 1 R =Q0 1 1 0 E =Q1 R =Q0 D1 D0 1 1 0 0 1 0 1 0 1 0 1 0 0 1 1 1 Da die letzte Zeile der Wahrheitswerttabelle nicht vorkommt, können hier die Werte für D1 und D0 frei gewählt werden. Wähle hier D1=0 und D0=1, dann erhält man besonders einfache Verknüpfungen: D1 = Q0 und D0=Q1 NAND Q0. Jetzt kann man mit den FF-Ausgängen Q1 und Q0 direkt die Steuereingänge E bzw. R ansteuern. Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 7 von 14 Praktikum Sensortechnik: Drehzahlmessung 3 Vorbereitung vor dem Versuch (gehört ins Protokollbuch) Beschreiben Sie kurz und prägnant mit den wesentlichen Formeln, wie eine Feldplatte funktioniert. Zeichnen Sie die Analogschaltung aus Brücke, Schmitt-Trigger und npnTransistorschalter in das Protokollbuch. Entwerfen Sie den digitalen Zähler: Entwerfen Sie einen synchronen mod-3 Zähler zur Ansteuerung des Frequenzzählers. Die Ausgänge bezeichnen wir mit Q0 und Q1. Er wird (z.B. von der Adapter/Clock) mit Taktfrequenz 1 Hz betrieben. Leiten Sie nun die Logik ab, um aus Q0 und Q1 auf E und R zu schließen. Zeichnen Sie den vollständigen Zähler. Wer die Schaltungen nicht verstanden die obigen Aufgaben nicht gemacht hat, kann den Versuch nicht durchführen. Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 8 von 14 Praktikum Sensortechnik: Drehzahlmessung 4 Durchführung des Versuchs 4.1.1 Sensor Alle notwendigen Bauelemente werden aus dem Leyboldsystem des A/D-Praktikums genommen. Bauen Sie den Motor und die Feldplatten auf. Legen Sie an die Feldplatten 5V an. Legen Sie den Motor an eine regelbare Spannungsversorgung und schalten Sie ein. Die Spannung am Motor darf auf keinen Fall längere Zeit größer als 18 V sein und sollte im Dauerbetrieb 12V nicht überschreiten. Schauen Sie sich den Spannungsverlauf an den beiden Feldplatten an. Zeichnen Sie das Ergebnis ab. Erklären Sie den Verlauf. Nun bauen Sie, wie in Ihrer Vorlage gezeichnet, mit dem Potentiometer eine Brücke auf und messen Sie den Spannungsverlauf in der Brücke mit dem Oszilloskop. Wie reagiert das Signal auf Änderungen des Potentiometers? 4.1.2 Analoge Signalverarbeitung Bauen Sie nun den Schmitt-Trigger auf. Geben Sie aus dem Funktionsgenerator eine Sinussignal von etwa 300mV Amplitude auf den Eingang. Funktioniert die Schaltung richtig? Bauen Sie nun den Transistorschalter hinter den Schmitt-Trigger. Testen Sie mit dem Generatorsignal. Funktioniert die Schaltung richtig? Verbinden Sie nun die Brücke mit dem Schmitt-Trigger. Messen Sie den Ausgang des Transistorschalters mit dem Oszilloskop. Funktioniert alles richtig? Können Sie mit dem Oszilloskop die Frequenz messen? 4.1.3 Digitale Signalverarbeitung Die TTL Signale des Monoflops werden auf die Digitalschaltung zur Frequenzmessung mit fester Torzeit von 1 Sekunde gegeben. Bauen Sie den Frequenzzähler auf, wie sie ihn in der Vorbereitung entworfen haben. Testen Sie mit dem Quartz-Oscillator oder dem TTL-Ausgang des Funktionsgenerators, ob ihre digitale Schaltung richtig funktioniert, ob also die Schaltung richtig zählt. 4.2 Test des Aufbaus Wenn Sie den analogen und den digitalen Aufbau miteinander verbinden, müssen Sie darauf achten, dass auf beiden Aufbauten der gleiche Bezugspunkt für die Spannungen vorhanden ist. Sie müssen also die Massen der Aufbauten miteinander verbinden. Jetzt können Sie den ganzen Aufbau in Betrieb nehmen. Wie können Sie überprüfen, dass korrekt gezählt wird? Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 9 von 14 Praktikum Sensortechnik: Drehzahlmessung 4.3 Messung mit anderer Torzeit Der Frequenzzähler zählt die Anzahl von Zähnen, die pro Zeit am Sensor vorbeilaufen. Da das Zahnrad 40 Zähne hat, muss die gemessene Frequenz durch 40 dividiert werden, um die Drehzahl in 1/sec zu erhalten. Messen wir allerdings mit einer Torzeit von ¼ Sekunde, oder dividieren wir die Frequenz (mit T-Flipflop oder JK FF) durch 4, dann müssen wir den Zählerstand einfach durch 10 dividieren, um die Drehzahl pro Sekunde zu erhalten. Dies lässt sich einfach erreichen, wenn man als Taktgenerator für den Steuerzähler nicht den 1 Hz Ausgang der Adapter/Clock benutzt, sondern den 4 Hz Ausgang des QuartzOscillators. Oder die JK-FF benutzt. 4.4 Anwendung Messen Sie die Drehzahl des Motors in Abhängigkeit von der angelegten Betriebsspannung. Sie können kurzzeitig maximal 18V anlegen. Messen Sie z.B. in 1 V Abständen. Tragen Sie die Ergebnisse in eine Tabelle ein und auf mm-Papier auf. Erhalten Sie einen linearen Verlauf? Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 10 von 14 Praktikum Sensortechnik: Drehzahlmessung 5 Hinweise zur Auswertung Die Vorbereitung steht im Protokollbuch. Dann protokollieren Sie während des Versuchs alle Ergebnisse, Berechnungen, Zwischenschritte und besonderen Vorkommnisse. Wenn sinnvoll, skizzieren Sie Bilder vom Oszilloskop. Nach dem Versuch werten Sie die Messungen aus, zeichnen die Abhängigkeit der Drehzahl von der Motorspannung. Dann führen Sie eine einfache Kostenrechnung durch. Dazu stellen Sie eine Stückliste der von Ihnen realisierten Schaltung auf und ermitteln die Preise. Anhang Grundlage Schmitt-Trigger Übersicht über die Logik-Bausteine Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 11 von 14 Praktikum Sensortechnik: Drehzahlmessung Der Schmitt-Trigger Beim Schmitt-Trigger wird der Ausgang des OP nicht auf den – Eingang, sondern auf den +Eingang geführt. Eine einfache Version zeigt das nebenstehende Bild. Betrachtet man nur den OP, dann wird der Zusammenhang zwischen der Spannung Ui zwischen den beiden Eingängen und der Ausgangsspannung Ua durch die (näherungsweise) Rechteckkurve im unteren Diagramm dargestellt. Andererseits kann man die Gesamtspannung in einer Masche von Masse über Ui, UR2 und Ua bilden, die ja Null sein muss. Dies ergibt die Gleichung im unteren Diagramm. Im Allgemeinen hat diese Gleichung eine grafische Form wie die Gerade, die im Diagramm eingezeichnet ist. Man sieht, dass die Gerade an drei Stellen die Verstärkungskurve schneiden kann. Es gibt also drei mögliche Arbeitspunkte. Der in der Mitte ist instabil (die Begründung ist etwas kompliziert). Es bleiben also 2 Arbeitspunkte. Allerdings kann die Gerade durch U1 verschoben werden. Und zwar so, dass nur ein Arbeitspunkt bleibt. Wie groß muss U1 sein, damit die Ausgangsspannung die positive Maximalspannung +15V (negative Minimalspannung U-) gerade erreicht? Dazu sucht man das U1.so dass bei Ui=0V gerade Ua = 15V (-15V) ist. Setzt man dies in die Formel ein, erhält man U1,s=-(R1 / R2 )*15V { +(R1 / R2 )*15V } Beginnt man mit sehr negativem U1, dann ist der einzige Schnittpunkt (=Arbeitspunkt) bei Ua = -15 V. Erhöht man U1, dann überschreitet man irgendwann den negativen Schaltpunkt, ab dem zwei Arbeitspunkte möglich sind. Da aber der negative Arbeitspunkt schon herrschte, bleibt die Schaltung in diesem. Erst wenn der positive Schaltpunkt überschritten wird, ist nur noch der positive Arbeitspunkt möglich, der Ausgang springt vom negativen zum positiven Maximum. Entsprechend schaltet die Schaltung bei Absenken von U1 erst dann um, wenn der negative Schaltpunkt unterschritten wird. Die Schaltpunkte für die Eingangsspannung sind also U1,s=+-(R1 / R2 )*15V Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 12 von 14 Praktikum Sensortechnik: Drehzahlmessung Digitale Bausteine Die Adapter/Clock dient zur Stromversorgung der Logikboards und gibt TTL-Pulse mit 50 Hz und 1 Hz aus. Der 4-Bit-Counter ist ein Zähler, die Pulse am +Eingang (oben) werden gezählt. Das LED Display zeigt das binäre Muster an den 4 Eingängen rechts als Hex-Zahl an. Der 4-Bit-Counter: wird mit R=0 auf 0 zurückgesetzt, eine andere Möglichkeit bietet der E-Eingang. Mit E=0 wird der Zähler auf den Stand gesetzt, der an den linken Dateneingängen anliegt. Beim LED-Display wird bei E=0 das an den Eingängen anliegende Bitmuster angezeigt, bei E=1 bleibt das vorher angezeigte Zeichen gespeichert. Der Quartz-Oscillator erzeugt ein sehr frequenzstabiles TTL-Signal mit 32768Hz, das auf bis 0,5Hz heruntergeteilt wird. Das 4-Bit-Register enthält 4 flankengetriggerte D-Flipflops, für synchrone Schaltwerke, die von einem Takt getriggert werden. Zwei davon werden für den Steuerzähler verwendet. JK-Flipflops können als Frequenzhalbierer eingesetzt werden. Das kann unter Umständen hier nützlich sein. Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 13 von 14 Praktikum Sensortechnik: Drehzahlmessung Thomas Rose Drehzahlmessung.doc Version vom 12.12.2013 3:54 Seite 14 von 14 Praktikum Sensortechnik 1 Positionsempfindliche Diode Szenario Zur Entfernungs- und Abstandsmessung werden unter anderem Laser-Triangulationssensor benutzt. Diese senden einen Lichtstrahl, meist einen Laserstrahl, aus. Trifft er auf ein Objekt, wird der Auftreffpunkt über eine Optik auf einen Detektor abgebildet, der nicht nur die Lichtintensität messen kann, sondern auch den Auftreffpunkt. Als Detektor kann eine CCD-Zeile oder eine Positionsempfindliche Diode (PSD) benutzt werden. Aus dem Auftreffpunkt auf dem Sensor kann dann der Abstand des Objektes berechnet werden. Ihre Aufgabe ist es nun, für einen solchen PSD eine Auswerte-Elektronik aufzubauen und dann zu testen. Praktikum Sensortechnik: Positionsempfindliche Diode Ziel dieses Versuches die Beschaltung einer positionsempfindlichen Diode kennenlernen und testen Inhalte Aufbau einer Auswerteschaltung, Durchführung einer Linearitätsmessung Vorkenntnisse: Funktionsweise von Photodioden und PSD, Verstärkerschaltungen mit OPs Auswertung siehe letztes Kapitel der Anleitung benötigte Hilfsmittel Protokollbuch (DIN A 5-, besser DIN A4-Kladde, kariert), Rechner, Millimeterpapier Anhang: Datenblätter Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 2 von 14 2 Einleitung Positionsempfindliche Dioden detektieren nicht nur die auftreffende Lichtleistung, sondern geben auch den Auftreffort, genauer gesagt den Schwerpunkt der auftreffenden Lichtverteilung, an. Diese Eigenschaft wird beispielsweise in Laser-Triangulations-Systemen zur Abstandsmessung ausgenutzt. In diesem Versuch sollen Sie eine komplette Ausleseschaltung für einen PSD verstehen, aufbauen und testen. Die Schaltung ist recht umfangreich und wird auf einem „BreadboardSystem“ (auch Steckplatine genannt) aufgebaut, das auch für professionelle Experimentieraufbauten verwendet wird. Die Bauteile können hier ohne Gehäuse und ohne Löten miteinander verbunden werden. Sie bauen dann eine einfache Optik auf, in der eine LED auf den PSD abgebildet wird. Der PSD ist auf einem Verfahrtisch montiert. So kann der PSD gegenüber dem LED bewegt werden. Damit sollen Sie dann, als einfache Anwendung, eine Linearitätskennlinie aufnehmen. Praktikum Sensortechnik: Positionsempfindliche Diode 3 Theoretische Grundlagen 3.1 PSD Ein PSD ist eine in einer Richtung ausgedehnte Photodiode. An beiden Seiten wird ein Strome abgegriffen. Trifft nun Licht an der Stelle x auf, so teilt sich der resultierende Photostrom nach links und rechts auf. Dabei gilt Die Größe (I1 - I2) /(I1 + I2) bestimmt also den Auftreffpunkt x. Durch geeignete OP-Schaltungen kann diese Größe aus den beiden Photoströmen errechnet werden. Eine entsprechende Schaltung ist im Anhang angegeben. Mit dieser Schaltung kann dann beispielsweise die Linearität des PSDs überprüft werden. 3.2 Auswerteschaltung Die Auswerteschaltung ist ein Musterbeispiel für die OP-Schaltungen, die Sie in der AD-Technik kennengelernt haben. In obiger Formel wird die Position als Funktion der Diodenströme bestimmt. Da in der Elektronik meist Spannungen weiterverarbeitet werden, müssen die beiden Ströme erst einmal in proportionale Spannungen umgewandelt werden. Dies geschieht mit zwei Transimpedanzwandlern, die mit den beiden OP07 aufgebaut sind. Die I-U Wandlung geschieht hier über die beiden 100kOhm Widerstände. Der parallel geschaltete 1 nF Kondensator kann als frequenzabhängiger Widerstand betrachtet werden und dient zur Reduzierung des Rauschens. Bei hohen Frequenzen wird die Impedanz dieser Kondensatoren immer kleiner. Wenn Sie vergleichbar oder kleiner als die 100 kOhm wird, wird die Rückkopplung nur noch darüber bestimmt und die Ausgangsspannung sinkt mit der Frequenz ab. Damit wird der Rauschanteil mit hohen Frequenzen unterdrückt. Das 20 kOhm Potentiometer dient beim OP07 zur Einstellung des Offsets, der Nullpunktverschiebung. Da beide Transimpedanzwandler den gleichen Rückkoppelwiderstand haben, ist bei beiden die Ausgangsspannung auf gleiche Weise proportional dem Eingangsstrom, in obiger Formel kann also I einfach durch U ersetzt werden. Um die Formel zu realisieren, müssen nun die Summe und die Differenz gebildet werden. Dazu dienen der Addierverstärker, die obere Schaltung mit OP27, und der Differenzverstärker, die untere Schaltung mit OP27. Die Ergebnisse müssen noch dividiert werden. Dies macht die Schaltung auf der rechten Seite, mit dem OP07und dem AD633JN. Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 4 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Der AD633JN liegt in der Rückkopplung des OP07. Er ist ein Multiplizierer. Seine Ausgangsspannung an Pin7, U7, hängt ab von den beiden Eingangsspanungen an Pin 1 und Pin 3, U1 und U3 U7 = (U1 * U3) / 10V Mit den Goldenen Regeln habe ich nun abgeleitet, dass für die im Schaltbild angegebene Ausgangsspannung OUT gilt: OUT=-(Ex / E) *10V Dies stimmt NICHT mit der im Schaltbild angegebenen Formel überein. Leiten Sie also selbst die Formel für OUT ab und stellen Sie fest, ob Hamamatsu Recht hat oder der Professor. Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 5 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode 4 Vorbereitung vor dem Versuch (gehört ins Protokollbuch) Beschreiben Sie kurz und prägnant mit den wesentlichen Formeln, wie eine PSD funktioniert. Kleben Sie eine Kopie der Gesamtschaltung ins Protokollbuch. Markieren Sie in der Schaltung die Transimpedanzverstärker, Summierer, Subtrahierer, Multiplizierer und Dividierer. Schreiben Sie für jede Teilschaltung den Zusammenhang für Eingangsund Ausgangsgröße hin, leiten Sie insbesondere die Formel für den Dividierer ab. In der Anlage sehen Sie ein Photo des Steckbrettes, auf dem die Schaltung aufgebaut wird. Die Bauteile können mit ihren Anschlussdrähten in die Öffnungen gesteckt werden. Jeweils 5 in einer Zeile benachbarte Öffnungen sind intern miteinander verbunden. Zusätzlich gibt es die Verbindungen von oben nach unten, die mit + und – gekennzeichnet sind. Diese werden für die positive und negative Betriebsspannung und die Masseleitung benutzt. Skizzieren Sie in diesem Bild den Verdrahtungsplan für die komplette Schaltung. Dabei sind die Widerstände und Kondensatoren mit Anschlussdrähten mindestens etwa 5 Rasterpunkte breit. Die Potentiometer müssen Sie nicht skizzieren. Wer die Schaltungen nicht verstanden die obigen Aufgaben nicht gemacht hat, kann den Versuch nicht durchführen. Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 6 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode 5 Durchführung des Versuchs 5.1 Optik Erstellen Sie mit LED, Linsen und dem PSD auf einem Verschiebetisch einen optischen Aufbau. Die Linsen haben Brennweite 40mm (D=25mm) und 10mm(D=8mm). Mit der ersten Linse soll möglichst viel LED-Licht gesammelt werden, die zweite Linse bildet einen möglichst kleinen Lichtfleck ab. 5.2 Elektronik Bauen Sie auf einer Steckplatine die Schaltung auf. In einer ersten Stufe bauen Sie die Transimpedanzwandler auf. Stellen Sie dann den optischen Aufbau so ein, dass der Lichtfleck etwa in der Mitte des PSD liegt. Optimieren Sie den optischen Aufbau dann so, dass die Signale V1 und V2 möglichst groß werden. Überprüfen Sie dann, ob die Ausgangsspannungen „sinnvoll“ sind. Wenn der Laser eine bestimmte Leistung P hat, dann wird diese optische Leistung in einen Photostrom umgewandelt, näherungsweise mit der Beziehung IPhoto / P = 0,5 A/W Eine genauere Beziehung finden Sie im Datenblatt. Welche? Der Photostrom wird dann über 100 kOhm in V1 bzw. V2 umgewandelt. Protokollieren Sie die Werte und entscheiden Sie, ob die Werte „sinnvoll“ sind. Dann bauen Sie den Addierer auf und testen, ob er sinnvolle Ergebnisse liefert. Dann bauen Sie den Differenzverstärker auf und testen, ob er sinnvolle Ergebnisse liefert. Dann komplettieren Sie die Schaltung und testen, ob sie sinnvolle Ergebnisse liefert. 5.3 Kalibriermessung Führen Sie nun an 20 Punkten über die Breite des PSD eine Messung durch, bei der Sie jeweils V1, V2, V1-V2, V1+V2, und (V1-V2)/(V1+V2) aufnehmen. Wie genau können Sie die einzelnen Größen ermitteln? Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 7 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode 6 Hinweise zur Auswertung Die Vorbereitung steht im Protokollbuch. Dann protokollieren Sie während des Versuchs alle Ergebnisse, Berechnungen, Zwischenschritte und besonderen Vorkommnisse. Wenn sinnvoll, skizzieren Sie Bilder vom Oszilloskop. Nach dem Versuch werten Sie die Kalibriermessung aus, dazu zeichnen die V1, V2, V1-V2, V1+V2, und OUT=(V1-V2)/(V1+V2) in Abhängigkeit von der Position des Lichtpunktes. Stellen Sie fest, in welchem Bereich OUT linear ist und wie groß die Abweichungen von der Linearität dort sind. Schätzen Sie ab, wie genau man aus einem Wert von OUT auf die Position zurückschließen kann. Dann führen Sie eine einfache Kostenrechnung durch. Dazu stellen Sie eine Stückliste der von Ihnen realisierten Schaltung auf und ermitteln die Preise. Anhang 1. Hamamatsu, Datenblatt PSD; 2. Analog Device, Datenblätter für Operationsverstärker 3. Schaltbild; 4. Steckplatine, Übersicht mit den gesteckten IC’s Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 8 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 10 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 11 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 12 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 13 von 14 Praktikum Sensortechnik: Positionsempfindliche Diode Thomas Rose PSD_13.doc Version 9 vom 10.12.2013 2:14 Seite 14 von 14