ppt-Format
Werbung

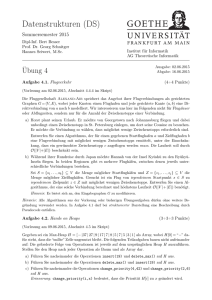
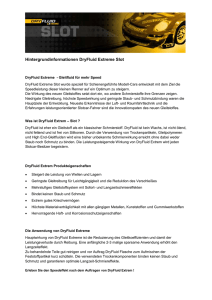
ExternspeicherAlgorithmen Algorithmen und Datenstrukturen 2 Petra Mutzel Technische Universität Wien Institut für Computergraphik und Algorithmen Durchwandern eines Arrays for (i=0; i<N; i++) D[i]=i; C=Permute(D) Lineares Durchlaufen: for (i=0; i<N; i++) A[D[i]]=A[D[i]]+1; Zufälliges Durchlaufen: for (i=0; i<N; i++) A[C[i]]=A[C[i]]+1; sec Durchwandern eines Arrays 9,00 8,00 7,00 6,00 5,00 zufällig linear 4,00 3,00 2,00 1,00 0,00 18 19 20 21 22 23 Größe 2k 24 25 k 223=8.388.608 sec Durchwandern eines Arrays 10,00 Logarithmische Skalierung zufällig linear 1,00 18 19 20 21 22 23 Größe 2k 24 25 k Hierarchisches Speichermodell moderner Computer Externspeicher CPU Cache main (internal) memory Faktor 100 schneller als Faktor 1000-106 schneller als secondary memory Probleme klassischer Algorithmen • Ein Zugriff im Hauptspeicher spricht jeweils eine Speicherzelle an und liefert jeweils eine Einheit zurück • Ein Zugriff im Externspeicher (ein I/O) liefert jeweils einen ganzen Block von Daten zurück • Meist keine Lokalität bei Speicherzugriffen, und deswegen mehr Speicherzugriffe als nötig Problem ist aktueller denn je, denn • Geschwindigkeit der Prozessoren verbessert sich zwischen 30%-50% im Jahr; • Geschwindigkeit des Speichers nur um 7%-10% pro Jahr • „One of the few resources increasing faster than the speed of computer hardware is the amount of data to be processed.“ Das Theoretische Sekundärspeichermodell (Parallel Disk Modell) Modell von Vitter und Shriver 1994 M= Anzahl der Elemente im Hauptspeicher CPU Rechenoperationen können nur mit Daten im Hauptspeicher getätigt werden Annahme: B<=M/2 main (internal) memory Externspeicher voneinander unabhängig B = Anzahl der Elemente, die in einen Block passen Analyse von Externen Algorithmen • Anzahl der ausgeführten I/OOperationen • Anzahl der ausgeführten CPUOperationen im RAM-Modell • Anzahl der belegten Blöcke auf dem Sekundärspeicher Untere Schranken im EM-Modell • Einlesen einer Menge von N Elementen benötigt mindestens Θ(N/B) I/O‘s • Sortieren einer Menge von N Elementen benötigt mindestens Θ(N/B log1+M/B (1+N/B)) (o.Bw.) • Suche in dynamischen Daten von N Elementen benötigt mindestens Zeit Θ(log N / log B) I/O-Operationen Externspeicherdatenstruktur für Prioritätswarteschlangen • Dynamische Datenstruktur für Elemente: Schlüssel + Information • Operationen: – Get_Min: Ausgabe der Elemente mit kleinstem Schlüssel – Del_Min: Ausgabe und Entfernung des kleinsten Elements – Insert: Einfügen eines neuen Elements Welche Datenstrukturen kennen Sie dafür? Externe Array-Heaps • Im internen Arbeitsspeicher: Heap • Im externen Speicher: Menge von sortierten Feldern unterschiedlicher Länge Die Anzahl der Plätze in einem Slot von Li+1 Externe Array-Heaps entspricht der Anzahl aller Plätze in Li Lemma 1: li+1=li (μ+1) L Schichten Li L3 li=(cM)i/Bi-1 l3=l2(μ+1) L2 L1 l2 c=1/7 L<=4 μ=(cM/B)-1 μ μ Slots: enthalten sortierte Folge oder sind leer Operation Insert • Fügt neue Elemente immer in den internen Heap H ein • Falls kein Platz mehr in H ist, dann werden vorher l1=cM dieser Elemente in den Sekundärspeicher bewegt: – Falls freier Slot in L1 existiert, dann werden diese Elemente in sortierter Folge dorthin bewegt – Sonst: Alle Elemente in L1 werden mit den neuen Elementen aus H zu einer sortierten Liste gemischt, die dann in einen freien Slot von L2 geschrieben werden. – Falls L2 auch kein freier Slot, wiederhole L3,...bis frei. Operation Del_Min • Invariante: Das kleinste Element befindet sich immer in H • Dazu: Heap wird in zwei Heaps geteilt: H1 und H2: – H1 enthält immer die neu eingefügten Elemente, maximal 2cM – H2 speichert maximal die kleinsten B Elemente in jedem belegten Slot j in jeder Schicht Li • Lemma 2: Es befinden sich maximal cM(2+L) Elemente im Hauptspeicher • Zusätzlich wird (μ+1)B=cM gebraucht, um die μ Slots plus eine Overflow Folge zu mischen Es muss gelten: M>=cM(3+L); Operation Del_Min Daraus folgt: bei c=1/7 => L<=4 • Invariante: Das kleinste Element befindet sich immer in H • Dazu: Heap wird in zwei Heaps geteilt: H1 und H2: – H1 enthält immer die neu eingefügten Elemente, maximal 2cM – H2 speichert maximal die kleinsten B Elemente in jedem belegten Slot in L • Lemma 2: Es befinden sich maximal cM(2+L) Elemente im Hauptspeicher • Zusätzlich wird (μ+1)B=cM gebraucht, um die μ Slots plus eine Overflow Folge zu mischen Operationen (1) • Merge-Level (i,S,S´): – produziert eine sortierte Folge S´ durch das Mischen der sortierten Folge der μ Slots in Li (inkl. der ersten Blocks in H2) und die sortierte Sequenz S. – Analyse: O(li+1/B) I/O´s • Store(i;S): – Annahme: Li enthält einen leeren Slot und die Folge S besitzt Länge im Bereich [li/2 , li] – S wird in einen leeren Slot von Li gespeichert und seine kleinsten B Elemente werden nach H bewegt. – Analyse: O(li/B) I/O´s Operationen (2) • Load (i,j): – Holt die nächsten B kleinsten Elemente vom j-ten Slot aus Li in den internen Heap H2. – Analyse: O(1) I/O´s • Compact(i): – Annahme: es existieren mind. 2 Slots in Li, mit Gesamtzahl an Elementen (inkl. H), höchstens li. – Diese beiden Slots werden gemischt, und in einen freien Slot von Li eingetragen. Damit wird ein Slot in Li frei. – S wird zu diesem freien Slot bewegt (kleinste B Elemente nach H). – Analyse: O(li/B) I/O´s Operation Insert • Fügt neue Elemente immer in den internen Heap H ein • Falls kein Platz mehr in H1 ist, dann werden die größten l1=cM Elemente nach L1 bewegt (und die kleinsten B davon nach H2): – Falls freier Slot in L1 existiert, dann wird Store(1,S) aufgerufen – Sonst: Alle Elemente in L1 enthalten mindestens li/2 Elemente: Merge-Level(i,S,S´) – Falls freier Slot in L2 existiert, dann: Store(2,S) – Sonst: wiederhole L3,...bis frei. Operation Del_Min • Das kleinste Element wird vom internen Heap entfernt (H1 oder H2). • Falls in H2: dann korrespondiert dieses zu Slot j einer Schicht Li. • Falls es das letzte Element in H2 ist, das zu j gehört, dann werden die nächsten B Elemente von Slot j nach H2 mittels Load(i,j) bewegt. • Nach jedem Load(i,j) wird Compact(i) bei Bedarf aufgerufen Korrektheit • Lemma 3: Das kleinste Element ist immer in H (H1 oder H2). • Lemma 4: Es ist immer ein freier Platz für neue Elemente vorhanden. I/O Schranken • Annahme: cM>3B • Lemma 5: Nach N Operationen existieren höchstens L<=logcM/B(N/B) Schichten. • Lemma 6: Store(i,S) benötigt höchstens 3li/B I/O´s. Compact(i+1) und Merge-Level(i,S,S´) benötigen höchstens 3li+1/B I/O´s. I/O Schranken Theorem: Annahme: cM>3B und 0<c<1/3 und N<=B(cM/B)1/c-3 In einer Folge von N Operationen der Art Insert und Del_Min benötigt – Insert amortisiert 18/B(log cM/B(N/B)) I/O´s und – Del_Min 7/B amortisierte I/O´s. Speicherplatzbedarf Lemma 7: Jede Schicht enthält höchstens einen Slot, der nicht-leer und aus weniger als li/2 Elementen besitzt. Theorem 2: Die Gesamtanzahl der benützten Blöcke ist höchstens 2(X/B)+2, wobei X die Anzahl der Elemente im Heap H ist. Der Gesamtspeicherplatz im Arbeitsspeicher beträgt cM(3+L). Insert: zuerst Insert, dann Del_Min 100000 10000 radix heap array heap buffer tree B-tree 1000 100 10 1 1 5 10 25 50 75 100 150 200 *106 Del_Min: zuerst Insert, dann Del_Min 100000 10000 radix heap array heap buffer tree B-tree 1000 100 10 1 1 5 10 25 50 75 100 150 200 *106 Insert: Zufällige Folge 1000000 100000 10000 radix heap array heap buffer tree 1000 100 10 1 1 5 10 25 50 75 100 150 200 *106 Del_Min: Zufällige Folge 1000000 100000 10000 radix heap array heap buffer tree 1000 100 10 1 1 5 10 25 50 75 100 150 200 *106 Literatur Die Vorlesung hält sich eng an: Andreas Crauser: LEDA-SM: External Memory Algorithms and Data Structures in Theory and Praxis. Dissertation, Max-Planck-Institut für Informatik, Saarbrücken, 2001. Kapitel 4: Priority Queues; http://www.mpi-sb.mpg.de/~crauser/degrees.html Klaus Brengel, Andreas Crauser, Paolo Ferragina, Ulrich Meyer: An Experimental Study of Priority Queues in External Memory, Proc. of the Workshop on Algorithmic Engineering (WAE ´99), Lecture Notes in Computer Science 1668, 345-359, Springer-Verlag, 1999 Vielen Dank