Beispiel 1 Ein Angestellter kostet 7.500 DM Lohn
Werbung

Lineare Algebra – Rechnen mit Matrizen
Beispiel 1
Ein Angestellter kostet 7.500 Euro Lohn/Monat
Wie hoch sind die Lohnkosten für 5 Angestellte?
==> 5 · 7.500 Euro = 37.500 Euro
Lineare Zusammenhänge sind in der Wirtschaft sehr
häufig anzutreffen.
Lineare Algebra – Rechnen mit Matrizen
Beispiel 2
Für die Produktion eines Bauteiles muß eine Maschine 36
Sekunden laufen.
Wie lange ist die Laufzeit bei der Produktion von 1000
Bauteilen?
==> 1.000 · 36 Sekunden = 36.000 Sekunden = 10 Stunden
Oder - etwas komplizierter:
Wieviel Bauteile können auf 10 Maschinen in 8 Arbeitsstunden
produziert werden?
10
(Maschinen)·8 (Stunden/Maschine)·
36
= 8000 (Bauteile)
3600
(Sekunden/Bauteil)
(Sekunden/Stunde)
Lineare Algebra – Rechnen mit Matrizen
Matrizen: Einführendes Beispiel
Gegeben sei der folgende Sachverhalt:
Ein Betrieb produziert 3 Produkte P1, P2 und P3 auf
2 Maschinen M1 und M2. Produkt P1 muss 1 h auf
Maschine M1 und 2 h auf Maschine M2 laufen.
Produkt P2 muss 3 h auf Maschine M1 und 1 h auf
Maschine M2 laufen. Produkt P3 muss 1,5 h auf
Maschine M1 und nicht auf Maschine M2 laufen.
Aufgabe: Schreiben Sie diesen
Sachverhalt übersichtlich auf!
Lineare Algebra – Rechnen mit Matrizen
Matrizen: Einführendes Beispiel
Ein Betrieb produziert
3 Produkte P1, P2 und P3
auf
2 Maschinen M1 und M2.
Die Laufzeiten (in Stunden) entnehme man folgender Tabelle:
Produkt 1
Produkt 2
Produkt 3
Maschine 1
1
3
1,5
Maschine 2
2
1
0
Lineare Algebra – Rechnen mit Matrizen
Matrizen: Einführendes Beispiel
Die Maschinenlaufzeiten sind also in einer Tabelle zusammengefasst. Entfernt man die Beschriftung, so sieht die
Tabelle wie folgt aus:
1
3
1,5
2
1
0
Ein solches, rechteckiges Zahlenschema nennen wir in der
Mathematik eine Matrix. Es wird dabei etwas anders
hingeschrieben.
1
3
1, 5
2
1
0
Lineare Algebra – Rechnen mit Matrizen
Matrizen: Einführendes Beispiel
Wenn wir mit Matrizen in der Anwendung hantieren, dürfen
wir die Herkunft (die “Beschriftung”) nicht vergessen, da sie
uns angibt, was die Zahlen in der Matrix zu bedeuten haben.
1
3
1, 5
2
1
0
Eine Matrix ohne Interpretation ist nichtssagend!
Lineare Algebra – Rechnen mit Matrizen
Matrizen: Einführendes Beispiel
Jeder Spalte steht
für eine Maschine!
(Es gibt 2 Maschinen)
1
Jeder Zeile steht
für ein Produkt!
3
(Es gibt 3 Produkte)
1, 5
2
1
0
Die Einträge geben die
Maschinenlaufzeiten
der Produkte an!
Lineare Algebra – Rechnen mit Matrizen
Wichtige Eigenschaften einer Matrix
Spaltenanzahl
(hier 2)
Zeilenanzahl
(hier 3)
1
3
1, 5
2
1
0
Wertebereich der Einträge
(auch Koeffizienten genannt)
(hier: nicht-negative Zahlen)
Lineare Algebra – Rechnen mit Matrizen
Definition einer Matrix
Das rechteckige Zahlenschema
a 1 ,1
a 2 ,1
a
m ,1
a1, 2
a 2,2
a m ,2
a1, n
a 2 ,n
a m , n
heißt Matrix mit m Zeilen und n Spalten,
oder m × n Matrix (Mehrzahl: Matrizen)
Die Zahlen in dem Schema heißen Einträge, Elemente oder
Koeffizienten der Matrix.
Lineare Algebra – Rechnen mit Matrizen
Beispiele für Matrizen
1
2
7
8
4
0
3
0
0
2
0
3
2
3
42
5
6
3
ist eine 3 ×5 Matrix mit nicht0 negativen, ganzen Zahlen
1
ist eine 1 × 4 Matrix
mit positiven, ganzen Zahlen
ist eine 1 × 1 Matrix
Lineare Algebra – Rechnen mit Matrizen
Spezielle Matrizen: Vektoren
Definition: Eine Matrix mit nur einer Zeile
oder Spalte wird auch Vektor genannt.
1
0
2
3
ist ein Spaltenvektor mit 4 Komponenten
(0,5 3 2 1,1 -2)
ist ein Zeilenvektor mit 5 Komponenten
Lineare Algebra – Rechnen mit Matrizen
Beispiele
Der Wertebereich der Einträge ist wichtig und
sollte stets im Auge behalten werden!
Beispiel 1
Die folgende Matrix gebe für 2 Abteilungen einer Firma an,
wieviel Arbeiter, Angestellte und Manager dort beschäftigt sind:
Arbeiter Angestellte Manager
Abteilung 1
Abteilung 2
20
35
12
14
2
3
Die Einträge der Matrix müssen positive, ganze Zahlen sein!
Es gibt weder halbe, noch negative Arbeiter!
Lineare Algebra – Rechnen mit Matrizen
Beispiele
Der Wertebereich der Einträge ist wichtig und
sollte stets im Auge behalten werden!
Beispiel 2
Die folgende Matrix gebe für 2 Produkte einer Firma an, wie
diese prozentual aus 3 Rohstoffen zusammengesetzt sind
Rohstoff 1
Produkt 1
Produkt 2
50%
10%
Rohstoff 2
30%
85%
Rohstoff 3
20%
5%
Die Einträge der Matrix müssen Prozentwerte zwischen 0%
und 100% sein! Ein Produkt kann nicht aus 150% eines
Rohstoffs bestehen.
Lineare Algebra – Rechnen mit Matrizen
Beispiele
Der Wertebereich der Einträge ist wichtig und
sollte stets im Auge behalten werden!
Beispiel 3
Die folgende Matrix gebe für 2 Firmen, wieviel Gewinn
oder Verlust sie in drei Geschäftsjahren gemacht haben
(in Mio. DM):
1994
Firma 1
Firma 2
11,5
20,8
1995
8,8
22,9
1996
1,24
18,6
Die Einträge der Matrix sind beliebige reelle Zahlen,
positiv oder negativ! Verluste/Gewinne können beliebige
Werte annehmen!
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die Einheitsmatrix
Definition 3
Eine quadratische Matrix, in der alle Einträge auf der
Hauptdiagonale Eins sind und alle anderen Einträge
Null, heißt Einheitsmatrix
1
0
0
0
0
0
1
0
0
1
0
0
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die Diagonalmatrix
Definition 4
Eine Matrix, in der alle Einträge außer der
Hauptdiagonale Null sind, heißt Diagonalmatrix
4
0
0
0
0
0
0
6
0
0
7
0
0
0
0
0
0
0
8
0
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die Nullmatrix
Definition 5
Eine Matrix, in der alle Einträge Null sind,
heißt Nullmatrix.
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Drei Automobilfirmen werden von 6 Zulieferern mit Bauteilen
beliefert. Die folgende Matrix gibt an, wieviel die Autofirmen
an die Zulieferer pro Quartal zahlen:
Zulieferer
1
Autofirma 1
Autofirma 2
Autofirma 3
1234
2350
1005
Zulieferer
2
Zulieferer
3
Zulieferer
4
Zulieferer
5
800
8123
5988
120
1500
7023
10235
240
1003
6523
4468
300
Zulieferer
6
352
752
1200
Frage: Wie sieht die Matrix aus, die beschreibt, wieviel die
Zulieferfirmen von den Autofirmen erhalten?
“Autofirma 1 zahlt pro Quartal 120 TDM an Zulieferer 5”
“Zulieferer 5 erhält pro Quartal 120 TDM von Autofirma 1”
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die Matrix aus Sicht der Autofirmen
(“Wieviel zahlen wir an die Zulieferer?”)
Zulieferer
1
Autofirma 1
Autofirma 2
Autofirma 3
1234
2350
1005
Zulieferer
2
Zulieferer
3
Zulieferer
4
Zulieferer
5
800
8123
5988
120
1500
7023
10235
240
1003
6523
4468
300
Zulieferer
6
352
752
1200
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die Matrix aus Sicht der
Zulieferer
(“Wieviel bekommen wir
von den Autofirmen?”)
Autofirma
1
Zulieferer 1
Zulieferer 2
Zulieferer 3
Zulieferer 4
Zulieferer 5
Zulieferer 6
1234
800
8123
5988
120
352
Autofirma
2
Autofirma
3
2350
1005
1500
1003
7023
6523
10235
4468
240
300
752
1200
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Zulieferer
1
Autofirma 1
Autofirma 2
Autofirma 3
Zulieferer
2
1234
2350
1005
Zulieferer
3
Zulieferer
4
Zulieferer
5
800
8123
5988
120
352
1500
7023
10235
240
752
1003
6523
4468
300
1200
Zulieferer
6
Die Matrix wird durch “Kippen” zu folgender Matrix:
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
“Aus Zeilen werden
Spalten, aus Spalten
werden Zeilen.”
Autofirma
1
Zulieferer 1
Zulieferer 2
Zulieferer 3
Zulieferer 4
Zulieferer 5
Zulieferer 6
1234
800
8123
5988
120
352
Autofirma
2
Autofirma
3
2350
1005
1500
1003
7023
6523
10235
4468
240
300
752
1200
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die transponierte Matrix
Definition
Die Matrix, die entsteht, wenn wir in einer gegebenen
Matrix A die Zeilen als Spalten (bzw. die Spalten als
Zeilen) schreiben, heißt die transponierte Matrix AT.
Beispiel
Wie sieht die Transponierte der folgenden Matrix aus?
1
3
A
5
7
2
4
6
8
A
T
1 3 5 7
2 4 6 8
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
1
3
A
5
7
Die transponierte Matrix
2
6
8
4
A
T
1
2
3 5 7
4 6
8
Frage: Was erhält man, wenn man AT transponiert?
(A
T
)
T
1
3
5
7
2
4
A
6
8
Feststellung
Für alle Matrizen A gilt:
(AT)T = A
(Zweifaches Transponieren
liefert die Ausgangsmatrix)
Lineare Algebra – Rechnen mit Matrizen
Besondere Matrizen
Die transponierte Matrix
Frage: Wie sieht die Transponierte der folgenden Matrix aus?
1
A 0
3
0
3
2
7
7
8
1
T
A 0
3
0
2
7
3
7
8
Man sieht: Es gilt A = AT
Definition
Ist eine Matrix A gleich ihrer transponierten
Matrix AT , so heißt A eine symmetrische Matrix
Feststellung
Nur quadratische Matrizen können symmetrisch sein.
Lineare Algebra – Rechnen mit Matrizen
Erste Zusammenfassung
Um Zusammenhänge zwischen Komponenten übersichtlich
aufzuschreiben, eignen sich Tabellen besonders gut.
Beispiele dafür sind:
- Laufzeiten von Produkten auf Maschinen
- Lieferkosten von Anbietern zu Abnehmern
- Entfernungen zwischen Produktionsstätten
- Zusammensetzung von Produkten aus Rohstoffen
- Kosten für verschiedene Posten in Abteilungen
- usw.
Lineare Algebra – Rechnen mit Matrizen
Erste Zusammenfassung
Produkte setzen sich auf Rohstoffen zusammen:
Eine Firma stellt 3 Produkte her: Gummibärchen,
Schokolade und Hustenbonbons. In der folgenden Tabelle
ist angegeben, wie sich die Produkte prozentual aus den
Rohstoffen Zucker, Fett, Gelatine und Zusatzstoffen
zusammensetzen:
Zucker
Fett
Gelatine
Zusätze
Gummibären
40%
5%
50%
5%
Schokolade
40%
50%
0%
10%
Hustenbonbons
90%
0%
5%
5%
Lineare Algebra – Rechnen mit Matrizen
Erste Zusammenfassung
•Die mathematische “Modellierung” einer Tabelle ist die
Matrix (Plural: Matrizen)
•Eine Matrix ist ein rechteckiges Zahlenschema, die Zahlen
in der Matrix heißen Einträge
•Matrizen werden beschrieben durch:
- Anzahl Zeilen
- Anzahl Spalten
- Art der Einträge (reelle Zahlen, ganze Zahlen,
positive Zahlen, etc.)
•Matrizen mit nur einer Zeile bzw. Spalte heißen auch
Zeilenvektoren bzw. Spaltenvektoren.
Lineare Algebra – Rechnen mit Matrizen
Erste Zusammenfassung
•Die Einträge werden durch ihre Zeilen- und
Spaltennummer identifiziert (auch Zeilen- und
Spaltenindex genannt)
•Die Einträge mit gleichen Zeilen- und Spaltenindex bilden
die Hauptdiagonale einer Matrix
•Spezielle Matrizenformen sind:
- Quadratische Matrizen
- Diagonalmatrizen
- Einheitsmatrix
- Nullmatrizen
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
3 Betriebe beliefern 4 Abnehmer mit jeweils dem gleichen
Produkt. Die Lieferungen im ersten Halbjahr (in t) seien in
der folgenden Matrix L1 gegeben:
0
L 500
1
800
100
200
650
650
700
100
900
100
400
Die Lieferungen im zweiten Halbjahr seien in der Matrix L2
gegeben:
100
L 400
2
800
200
300
250
250
700
200
300
200
300
Lineare Algebra – Rechnen mit Matrizen
Addieren und Subtrahieren
Rechnen mit Matrizen
Frage: Wieviel lieferten die Betriebe im ganzen Jahr?
0
L 1 500
800
100
200
650
650
700
100
400
900
100
100
L 2 400
800
3 00
250
250
700
200
300
300
200
Lieferungen im 2. Halbjahr
Lieferungen im 1. Halbjahr
+
?
LG ?
?
200
?
500
?
?
?
?
?
?
?
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
Frage: Wieviel lieferten die Betriebe im ganzen Jahr?
0
L 1 500
800
100
200
650
650
700
100
900
100
100
L 2 400
800
400
Lieferungen im 1. Halbjahr
LG
100
900
1600
200
300
250
250
700
200
300
200
300
Lieferungen im 2. Halbjahr
300
500
900
900
1400
300
1200
300
700
Lieferungen im ganzen Jahr!
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
Frage: Wieviel lieferten die Betriebe im ganzen Jahr?
LG
100
900
1600
300
500
900
900
1400
300
1200
300
700
Lieferungen im ganzen Jahr!
Die Matrix LG, die die Lieferungen für das ganze Jahr beschreibt,
ist genauso groß, wie die Matrizen L1 und L2, die die Halbjahreslieferungen beschreiben (alles 3 x 4 Matrizen).
Die Einträge von LG ergeben sich als Summen der
entsprechenden Einträge in L1 und L2.
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
2 Lagerstätten lagern 3 Produkte. Der Lagerbestand
zu Beginn des Monats (in Produktionseinheiten) sei
durch die Matrix MA gegeben:
MA
1000
2000
1500
1000
1800
2500
Der Lagerbestand am Ende des Monats sei durch ME
gegeben:
ME
120
200
0
110
150
500
Frage: Wieviel wurde im Laufe des Monats von den
Lagerstätten ausgeliefert?
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
MA
1000
2000
1500
2500
1000
1800
Bestand am Monatsanfang
Addieren und Subtrahieren
M
E
120
0
150
200
110
500
Bestand am Monatsende
? ? 850
ML
?
? ?
Im Monat ausgelieferter Bestand?
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
MA
1000
2000
1500
2500
1000
1800
Bestand am Monatsanfang
Im Monat ausgelieferter Bestand
Addieren und Subtrahieren
M
E
120
0
150
200
110
500
Bestand am Monatsende
880
ML
1800
1500
2390
850
1300
Die Matrix ML ist genauso groß, wie die Matrizen MA und ME
(alles 2 x 3 Matrizen). Die Einträge von ML ergeben sich als
Differenzen der entsprechenden Einträge in MA und ME.
Man schreibt:
ML = MA - ME
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
2 Lagerstätten lagern 3 Produkte. Der Lagerbestand zu
Beginn des Monats (in Produktionseinheiten) sei durch die
Matrix MA gegeben:
MA
1000
2000
1500
1000
2500
1800
Der Lagerbestand für die Produkte 1 und 2 am Ende des
Monats sei durch ME gegeben:
ME
120
200
110
0
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Addieren und Subtrahieren
Frage: Können wir berechnen, wieviel von den
Lagerstätten im Laufe des Monats ausgeliefert wurde?
Genauer: Können wir berechnen, wieviel Lagerstätte 1
von Produkt 3 ausgeliefert hat?
==> Nein!
Frage: Warum nicht?
Antwort: In Matrix ME fehlen die Angaben für das Produkt 3 !
Allgemeiner: Die Matrizen MA und ME sind nicht gleich groß!
MA ist eine 2 x 3 Matrix,
ME ist eine 2 x 2 Matrix!
Feststellung
Matrizen unterschiedlicher Größe können nicht addiert
oder subtrahiert werden!
Lineare Algebra – Rechnen mit Matrizen
Addieren und Subtrahieren
Rechnen mit Matrizen
Definition 1
a 1,1
a 2,1
A
a
m,1
Seien A und B Matrizen mit m Zeilen und n Spalten:
a 1,2
a 2,2
a m,2
b 1,1
b 2,1
B
b
m,1
a 1, n
a 2, n
a m, n
b 1,2
b 2,2
a m,2
b 1, n
b 2, n
b m, n
Dann definiert sich die Summe A+B von A und B als
a 1,1
a 2,1
A B :
a
m,1
b 1,1
a 1,2 b 1,2
b 2,1
a 2,2 b 2,2
a m,2 b m,2
b m,1
a 1, n b 1, n
a 2, n b 2, n
a m, n b m, n
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Definition 2
a 1,1
a 2,1
A
a
m,1
Addieren und Subtrahieren
Seien A und B Matrizen mit m Zeilen und n Spalten:
a 1,2
a 2,2
a m,2
a 1, n
a 2, n
a m, n
b 1,1
b 2,1
B
b
m,1
b 1,2
b 2,2
a m,2
b 1, n
b 2, n
b m, n
Dann definiert sich die Differenz A-B von A und B als
a 1,1
a 2,1
A B :
a
m,1
b 1,1
a 1,2 b 1,2
b 2,1
a 2,2 b 2,2
a m,2 b m,2
b m,1
a 1, n b 1, n
a 2, n b 2, n
a m, n b m, n
Lineare Algebra – Rechnen mit Matrizen
Zusammenfassung
Rechnen mit Matrizen
• Matrizen gleicher Größe (mit gleicher Zeilen- und
Spaltenanzahl) können addiert werden.
• Man addiert Matrizen, indem man die Einträge
komponentenweise addiert.
• Für die Matrizenaddition gilt das Kommutativgesetz:
A+B = B+A
(Summanden dürfen vertauscht werden)
• Für die Matrizenaddition gilt das Assoziativgesetz:
(A + B) + C = A + (B + C) (Klammerung darf vertauscht
werden)
•Addition der Nullmatrix N verändert eine Matrix nicht:
A+N =N +A=A
(Die Nullmatrix ist „neutral“.)
• Subtraktion ist nur ein Spezialfall der Addition
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Multipliaktion einer Matrix mit
einer Zahl
Die folgende Matrix M gebe die monatlichen Budgets zweier Tochterfirmen für die Posten Personal, Sachmittel und Verbrauch (in TDM) an:
20,12
M
42,58
0,5
0,8
0,25
0,1
Aufgabe: Wie hoch sind die Budgets pro Quartal?
Lösung: Das Quartal hat 3 Monate, also sind die Quartalsbudgets
dreimal so hoch, wie die monatlichen Budgets. (Klar!)
M Quart
3 20,12
3 42,58
3 0,5
3 0,1
3 0,8 3 0,25
= 3 ·M
60,36
127,74
= 3M
1,5
0,3
2,4
0,75
Lineare Algebra – Rechnen mit Matrizen
Multiplikation einer Matrix mit
einer Zahl
Rechnen mit Matrizen
Sei A eine beliebige mxn Matrix und sei x eine beliebige Zahl.
A[1,1]
A[2,1]
A
A[m,1]
A[1,2]
A[2,2]
A[m,2]
A[1, n]
A[m, n]
A[2, n]
Werden alle Einträge von A mit x multipliziert, so sprechen wir von
der Multiplikation der Matrix A mit dem Skalar x.
Wir schreiben dafür xA:
x A[1,1]
x A[2,1]
xA
x A[m,1]
x A[1,2]
x A[2,2]
x A[m,2]
x A[1, n]
x A[m, n]
x A[2, n]
Lineare Algebra – Rechnen mit Matrizen
Rechnen mit Matrizen
Multiplikation einer Matrix mit
einer Zahl
Feststellung 1
Jede Matrix kann - unabhängig von ihrer Größe - mit einem Skalar
(einer Zahl) multipliziert werden.
Feststellung 2
Bei der Multiplikation mit einem Skalar (einer Zahl) ist es egal, ob
von links oder von rechts multipliziert wird.
Für eine Matrix A und eine Zahl x gilt stets:
xA=Ax
(Kommutativgesetz)
Lineare Algebra – Rechnen mit Matrizen
Zusammenfassung
Multiplikation einer Matrix mit
einer Zahl (Skalar)
• Eine Matrix A beliebiger Größe kann stets mit einer Zahl x (einem
Skalar) multipliziert werden. Man schreibt x A
• Man multipliziert Matrizen mit einem Skalar, indem man die
Einträge komponentenweise mit dem Skalar multipliziert.
• Es gilt das Kommutativgesetz:
x A = A x (Matrix und Skalar dürfen vertauscht werden)
• Es gilt das Assoziativgesetz:
(x y) A = x (y A) (Klammerung darf vertauscht werden)
• Es gilt das Distributivgesetz:
x (A+B) = xA+ xB
(Man darf ausmultiplizieren/ ausklammern)
• Multiplikation mit 0 ergibt die Nullmatrix
• Multiplikation mit 1 ergibt die Ausgangsmatrix: 1 A = A
• Multiplikation mit -1 negiert die Einträge: (-1 A) = -A
(Subtraktion ist nur ein Spezialfall der Addition)
Lineare Algebra – Rechnen mit Matrizen
Multiplikation von Matrizen
Modell
Regalsystem
2A 4A 6A
Korpus
Türen
Einlegeböden
Schubladensätze
A
1
1
1
0
1
2
3
3
6
1
0
0
Modellmatrix
Ein Auftrag zur Lieferung der verschiedenen
Schrankmodelle ist zu bearbeiten
Modell 2A
20 Stück
Modell 4A
40 Stück
Aufgabe: Berechnen Sie, wie viele
Schrankelemente jeweils hergestellt
werden müssen
Modell 6A
70 Stück
Lineare Algebra – Rechnen mit Matrizen
Multiplikation von Matrizen
Regalsystem
Korpus
Türen
Einlegeböden
Schubladensätze
1
1
1
0
A b
3
1
2
3
6
1
0
0
1*20+1*40+1*70 = 130
0*20+1*40+2*70 = 180
3*20+3*40+6*70 = 600
1*20+0*40+0*60 = 20
20
40
70
130
180
600
20
Modell 2A
20 Stück
Modell 4A
40 Stück
Modell 6A
70 Stück
Beachte: Die Multiplikationeiner
Matrix A mit einem Vektor b ist nur
möglich, wenn die Anzahl der
Spalten von A mitder Anzahl der
Koordinaten von b übereinstimmt
Lineare Algebra – Rechnen mit Matrizen
Multiplikation von Matrizen
Regalsystem
Unter Verwendung der Modellmatrix A sollen
folgende Kundenaufträge bearbeitet werden.
Modellmatrix
A
1
1
Kunde X
1
Modell 2A
10
40
Modell 4A
40
20
Modell 6A
50
10
0
1
2
3
3
6
1
0
0
Auftragsmatrix
10
Kunde Y
40
B 40
20
50
10
C
1* 10 1* 40 1* 50
1* 40 1* 20 1* 10
0 * 10 1* 40 2 * 20
0 * 40 1* 20 2 * 10
3 * 10 3 * 40 6 * 50
3 * 40 3 * 20 6 * 10
1* 10 0 * 40 0 * 50
1* 40 0 * 20 0 * 10
100
70
80
40
450
240
10
40
Lineare Algebra – Rechnen mit Matrizen
Multiplikation von Matrizen
Definition: Ist A = (aij) eine l x m – Matrix und B = (bjk) eine m x n
– Matrix, so ist das Produkt A B = C = (cik) eine l x n – Matrix.
Jedes Element cik der Produktmatrix C = (cik) berechnet man als
Skalarprodukt des i-ten Zeilenvektors der Matrix A mit dem k-ten
Spaltenvektor der Matrix B.
B m x nMatrix
AlxmMatrix
b
11
b
21
b
m1
a
11
a 21
a
l1
b
b
12
22
b
b
b
m2
a
a
12
22
a
l2
13
23
b
m3
a
a
13
23
a
l3
b
1n
2n
b mn
b
a
1m
a
2m
a
lm
Die Produktmatrix C = A B
Ist eine l x n Matrix
c23 = a21b13+a22b23+..+a2mbm3
c
11
c 21
c
l1
c
c
12
22
c
c
13
23
c
c
c
c
l2
l3
1n
2n
c
ln
Lineare Algebra – Rechnen mit Matrizen
Multiplikation von Matrizen
Achtung:
Man kann zu zwei Matrizen A und B nur das Produkt A B
bilden, wenn die Anzahl der Spalten des ersten Faktors A mit der
Anzahl der Zeilen des zweiten Faktors B übereinstimmt.
Zur Durchführung der Multiplikation lese man die Matrix A
zeilenweise und die Matrix B spaltenweise. Die Elemente des
Produkts erhält man als Skalarprodukt der Zeilenvektoren von A
mit den Spaltenvektoren von B.
Lineare Algebra – Rechnen mit Matrizen
Matrizen in Mathematica
Matrizen werden in Mathematica als Listen dargestellt:
Matrix1={{1,3,4},{4,5,7},{3,4,5}}
Matrix2={{4,2,3},{1,2,0},{1,9,4}}
Dieses stellt jeweils eine 3x3 – Matrix dar.
Um zwei Matrizen zu addieren, gibt man folgenden Befehl ein:
Matrix1+Matrix2
Man erhält als Darstellung wieder die Listendarstellung.
Möchte man das Ergebnis in der gewohnten Matrixschreibweise
erhalten, so genügt folgender Zusatz:
Matrix1+Matrix2//MatrixForm
Lineare Algebra – Rechnen mit Matrizen
Matrizen in Mathematica
Um zwei Matrizen zu multiziplizieren, gibt man folgenden Befehl
ein:
Matrix1.Matrix2 (Dieses ist der einfache Punkt)
Man erhält als Darstellung wieder die Listendarstellung.
Möchte man das Ergebnis in der gewohnten Matrixschreibweise
erhalten, so genügt folgender Zusatz:
Matrix1.Matrix2//MatrixForm
Lineare Algebra – Rechnen mit Matrizen
Matrizen in Mathematica
Um die inverse Matriz zu bestimmen, gibt es den Befehl:
Inverse[Matrix1]//MatrixForm
Lineare Algebra – Rechnen mit Matrizen
Die Basis eines Vektorraumes
Wir betrachten den zweidimensionalen Vektorraum über dem
Körper der reellen Zahlen.
Jeder Vektor kann als Linearkombination zweier sog.
Basisvektoren dargestellt werden.
Die Basisvektoren müssen linear unabhängig sein. Die Anzahl
der Basisvektoren hängt von der Dimension ab. Im
zweidimensionalen Vektorraum benötigt man 2 Vektoren, im
dreidimensionalen sind es dagegen 3.
Die Menge der Basisvektoren
nennt man Basis
Besonders einfache Basisvektoren
sind im R2 die folgenden:
b
1
1
,
0
b
2
0
,
1
Diese Basis nennt man auch die
kanonische Basis.
Lineare Algebra – Rechnen mit Matrizen
Die Basis eines Vektorraumes
Wie sieht nun die Basisdarstellung eines bestimmten Vektors
bzgl. der kanonischen Basis aus?
Folgender Vektor liegt vor:
x
7
5
Die Linearkombination bzgl. der kanonischen Basis
sieht dann wie folgt aus:
1
0
x 7 5
0
1
Wie man jetzt leicht nachvollziehen kann, sieht die Darstellung
eines beliebigen Vektors bzgl. der kanonischen Basis wie folgt
aus
x
x
y
1
0
x x y
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Definition:
f sei eine Abbildung von Vektoren, dann
heißt diese Abbildung linear, wenn
folgende Bedingungen erfüllt sind:
1. f( x y ) f( x ) f( y )
2. f( λ x ) λ f( x )
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Spiegelung an der x-Achse
P(4/3) P‘(4/-3)
oder allgemein
P(x/y) P‘(x/-y)
Die Matrix dazu lautet:
1
Mx
0
1
0
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Spiegelung an der x-Achse
P(4/3) P‘(4/-3)
oder allgemein
P(x/y) P‘(x/-y)
Die Matrix dazu lautet:
1
Mx
0
1
0
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Spiegelung an der y-Achse
P(4/3) P‘(-4/3)
oder allgemein
P(x/y) P‘(-x/y)
Die Matrix dazu lautet:
-1
My
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Spiegelung an der y-Achse
P(4/3) P‘(-4/3)
oder allgemein
P(x/y) P‘(-x/y)
Die Matrix dazu lautet:
-1
My
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Spiegelung an der 1. Winkelhalbierenden
P(4/2) P‘(2/4)
oder allgemein
P(x/y) P‘(y/x)
Die Matrix dazu lautet:
M 1.Wh
0
1
1
0
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um 90o
P(3/2) P‘(-2/3)
oder allgemein
P(x/y) P‘(-y/x)
Die Matrix dazu lautet:
0
M 90
1
- 1
0
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um 180o
P(3/2) P‘(-3/-2)
oder allgemein
P(x/y) P‘(-x/-y)
Die Matrix dazu lautet:
-1
M 180
0
0
- 1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um einen beliebigen Winkel
P(x/y) P‘(x‘/y‘)
Um die Rechnung zu vereinfachen,
bezeichnet man den Winkel zwischen
der x-Achse und dem Vektor zum
Punkt P mit , sei der Winkel
zwischen dem Vektor p und p‘.
Weiterhin bezeichnen wir die
Abstände der Punkte P und P‘ vom
Ursprung mit r.
Man erhält dann für die Koordinaten x und y des Punktes P:
Für die Koordinaten x‘ und y‘ des
Punktes P‘:
x = r cos und y = r sin
x‘ = r cos ( + ) und
y‘ = r sin ( + )
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
x = r cos und y = r sin
x‘ = r cos ( + ) und
y‘ = r sin ( + )
Mit Hilfe der Additionstheoreme für sin
und cos kann man die Beziehungen für
x‘ und y‘ vereinfachen. Dieses sind:
1.cos (+) = cos cos - sin sin
2.sin (+) = cos sin + sin cos
x‘ = r cos( + ) = r cos cos - r sin sin = x cos - y sin
y‘ = r sin( + ) = r cos sin + r sin cos = x sin + y cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um einen beliebigen Winkel alpha
P(x/y) P‘(x‘/y‘)
x‘ = r cos( + ) = r cos cos - r sin sin = x cos - y sin
y‘ = r sin( + ) = r cos sin + r sin cos = x sin + y cos
Damit ergibt sich die folgende Rotationsmatrix (Drehung um den
Ursprung mit einem beliebigen Winkel)
Cos
M
Sin
- Sin
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um einen beliebigen Winkel alpha
P(x/y) P‘(x‘/y‘)
Wie man jetzt leicht nachvollziehen kann, sieht die Darstellung eines
beliebigen Vektors bzgl. der kanonischen Basis wie folgt aus
x
x
y
1
0
x x y
0
1
Cos
M
Sin
- Sin
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Drehung um einen beliebigen Winkel alpha
P(x/y) P‘(x‘/y‘)
Die Matrix dazu lautet:
Cos
M
Sin
- Sin
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung
Unter einer Scherung versteht man eine Abbildung, bei der
der Flächeninhalt erhalten bleibt. Bei einer Scherung bleibt
eine Gerade der Ebene fix (unverändert), das heißt, jeder
Punkt dieser Geraden wird auf sich abgebildet. Alle anderen
Punkte der Ebene werden parallel zur Achse verschoben
Bei einer Scherung bleibt also der Abstand jedes Punktes zur
Achse unverändert. Damit werden Rechtecke und Dreiecke, bei
denen eine Seite parallel zur Achse ist, auf Parallelogramme
bzw. Dreiecke abgebildet, die (auf diese Seite) eine gleich
lange Höhe haben
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung
Bei einer Scherung
muss berücksichtigt
werden, dass die
Scherachse festgelegt
werden muss. In der
rechten Abbildung ist
es die x-Achse. Man
sieht, dass die Achse
des Dreiecks, die mit
der x-Achse
zusammenfällt, nicht
verändert wird.
Matrix zur Scherung
an der x-Achse
Scherung
1
x - Achse
0
0,6
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x-Achse
Eine Dreiecksseite ist jetzt
parallel zur x-Achse. Bei
der Scherung bleibt diese
Seite parallel zur ursprünglichen Dreiecksseite, ist
aber nach rechts verschoben.
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0
0,6
1
1
1
1,6
1
Matrix zur Scherung
an der x-Achse
Scherung
1
x - Achse
0
0,6
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x-Achse
Keine Dreiecksseite ist
jetzt parallel zur x-Achse.
Man sieht, dass der Punkt
auf der Scherachse bei
der Abbildung erhalten
bleibt. Die anderen
Punkte haben weiterhin
denselben Abstand von
der Scherachse.
Matrix zur Scherung
an der x-Achse
Scherung
1
x - Achse
0
0,6
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x-Achse
Keine Dreiecksseite ist
jetzt parallel zur x-Achse.
Weiterhin liegt kein Punkt
des Dreiecks auf der
Scherachse.
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0
0,6
1
6
0
6
0
Matrix zur Scherung
an der x-Achse
Scherung
1
x - Achse
0
0,6
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x-Achse
Keine Dreiecksseite ist
jetzt parallel zur x-Achse.
Weiterhin liegt kein Punkt
des Dreiecks auf der
Scherachse.
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0
0,6
1
1
2
2,2
2
Matrix zur Scherung
an der x-Achse
Scherung
1
x - Achse
0
0,6
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der y-Achse
Eine Dreiecksseite liegt
auf der y-Achse.
Ergebnisse entsprechend
zur Scherung an der xAchse
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0,6
0 3
1 4
3
5
,
8
Matrix zur Scherung
an der y-Achse
Scherung
1
y - Achse
0,6
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der y-Achse
Keine Dreiecksseite ist
jetzt parallel zur y-Achse.
Weiterhin liegt kein Punkt
des Dreiecks auf der
Scherachse. Die Eckpunkt
haben denselben Abstand
zur y-Achse.
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0,6
0 3
1 1
3
2
,
8
Matrix zur Scherung
an der y-Achse
Scherung
1
y - Achse
0,6
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x- u. y-Achse
Das Dreieck hat die Eckpunkte:
A(1/5), B(3/1) und C(5/3)
Die beiden Scherungen sind:
Scherung
Scherung
1
y - Achse
0,9
1
x - Achse
0
0
1
0,6
1
Es ist ein Unterschied, ob erst die
y-Scherung und dann die xScherung oder erst die x-Scherung
und dann die y-Scherung
durchgeführt wird.
Die Matrizenmultiplikation ist i.
Allg. nicht kommutativ.
1
0,9
1
0
0 1
1 0
0,6
1
1
0,9
0,6
1
0
1
1,54
0,9
0,6
1
0,9
0,6
1
1,54
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Scherung an der x- u. y-Achse
Das Dreieck hat die Eckpunkte:
A(1/5), B(3/1) und C(5/3)
1
0,9
1
0
0 1
1 0
0,6
1
1
0,9
0,6
1
0
1
1,54
0,9
0,6
1
0,9
0,6
1
1,54
Lila: Ausgangsdreieck
Rot: Erst die x- dann die yScherung
Grün. Erst die y- dann die xScherung
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Skalierung
Bei der Skalierung werden die Abmessungen des Objekts (geometrische Transformation) bzw. die Skaleneinteilung der Koordinatenachsen (Koordinatentransformation) vergrößert (Skalierungsfaktoren größer als 1) bzw. verkleinert. Die Skalierung bezieht sich
immer auf einen zu definierenden Punkt, der dann selbst seine Lage
nicht, während alle anderen Punkte ihren Abstand vom Bezugspunkt
vergrößern oder verkleinern. Bei der geometrischen Skalierung
bezüglich des Nullpunktes mit den Skalierungsfaktoren Sx und Sy
(jeweils in Richtung der Koordinatenachsen) berechnet sich die Lage
des neuen Punktes mit Hilfe der Matrix
Skalierung
Sx
0
0
Sy
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Skalierung in x-Richtung
Skalierung
x
2.5
0
0
1
Berechnung der
neuen Koordinaten
des Bildpunktes
2.5
0
0 5
1 2
12 ,5
2
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Skalierung in y-Richtung
Skalierung
y
1
0
0
2
Berechnung der
neuen Koordinaten
des Bildpunktes
1
0
0 5
2 2
5
4
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Skalierung in x- und y-Richtung
Skalierung
2.5
0
0
2
Berechnung der
neuen Koordinaten
des Bildpunktes
2.5
0
0 5
2 2
12 ,5
4
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen
Verschiebung in x- und y-Richtung
Das Dreieck hat die
Eckpunkte: A(1/5), B(3/1)
und C(5/3)
Das Dreieck soll in x-Richtung um 3 Einheiten und in
y-Richtung um 4 Einheiten
verschoben werden
Berechnung der neuen Koordinaten des Bildpunktes A
1
5
3
4
4
9
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Spiegelung an der xz-Ebene
Die Matrix dazu lautet:
1
M xz Ebene 0
0
0
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Spiegelung an der yz-Ebene
Die Matrix dazu lautet:
-1
M yz Ebene 0
0
0
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Spiegelung an der xy-Ebene
Die Matrix dazu lautet:
1
M xy Ebene 0
0
0
1
0
0
0
- 1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Spiegelungen an den Koordinaten-Ebenen
1
M xy Ebene 0
0
0
1
0
0
0
- 1
-1
M yz Ebene 0
0
1
M xz Ebene 0
0
0
1
0
0
0
1
0
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Drehung um die x-Achse
Die Matrix dazu lautet:
1
M x Achse 0
0
0
0
Cos
- Sin
Sin
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Drehung um die y-Achse
Die Matrix dazu lautet:
Cos
M y Achse 0
- Sin
0
Sin
1
0
0
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Drehung um die z-Achse
Die Matrix dazu lautet:
Cos
M z Achse Sin
0
- Sin
Cos
0
0
1
0
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Drehungen um die Koordinaten-Achsen
1
M x Achse 0
0
0
0
Cos
- Sin
Sin
Cos
Cos
M y Achse 0
- Sin
Cos
M z Achse Sin
0
- Sin
Cos
0
0
1
0
0
Sin
1
0
0
Cos
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Skalierung
Die Matrix dazu lautet:
M Skalierung
2.5
0
0
0
0
2
0
0
1.5
In x-Richtung: Faktor 2.5
In y-Richtung: Faktor 2
In z-Richtung: Faktor 1.5
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Scherung in x-Richtung
Die Matrix dazu lautet:
M ScherungxR
1
0.5
0
0
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Lineare Abbildungen im R3
Scherung in y-Richtung
Die Matrix dazu lautet:
M ScherungyR
1
0
0
0.5
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Transformationen
Problem: Keine einheitliche Beschreibung der Transformationen
Wie sieht die Hintereinanderausführung der Transformationen
aus?
Alle Operationen lassen sich durch 4x4-Matrizen (bzw. 3x3Matrizen) darstellen.
Erweiterung des Vektorraumes. 3D 4D (bzw. 2D 3D)
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Übersicht über die Transformationen
Verschiebung
Vektoraddition
Skalierung
Spiegelung
Skalare Multipliaktion
Rotation
Scherung
Matrixoperation
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Verschiebung
Alle Transformationen bis auf die Verschiebung können mit Hilfe
einer 2x2-Matrix durchgeführt werden. Bei der Verschiebung
erfüllt die Abbildung eine 2x1-Matrix (bzw. ein Spaltenvektor)
und diese wird noch addiert.
Beispiel: Der Punkt P(2/3)soll um 3-Einheiten in x-Richtung
verschoben werden. Dies erfüllt folgende Rechnung:
3
0
2
3
5
3
Der neue Punkt hat also die Koordinaten:
P‘(5/3)
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Verschiebung
Um alle Transformationen mit derselben Rechenoperation
durchführen zu können, müsste die Methode, mit der man die
Translation einbindet, geändert werden. Die Translation müsste
also durch eine Matrix mit der gleichen Anzahl von Zeilen und
Spalten wie die anderen Transformationsmatrizen dargestellt
werden.
Ein Ausweg bzw. Lösung sind die sog. homogenen
Koordinaten. In der Tat lassen sich nun die Translationen
gleichwertig mit allen anderen affinen Abb. als Produkte
"Matrix mal Vektor„ berechnen.
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Einbettung des 2D in homogene Koordinaten
x
y
1
x
y
1
V 0
0
0
1
0
Vx
Vy
1
Mit Hilfe dieser Matrix kann ein Punkt sowohl in x-Richtung (Vx)
als auch in y-Richtung(Vy) verschoben werden
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Einbettung des 2D in homogene Koordinaten
1
V 0
0
0
1
0
Vx
Vy
1
Beispiel: Der Punkt P(2/3) soll
um 3 Einheiten in x- und 4 Einheiten in y-Richtung verschoben
werden. Die Verschiebungsmatrix
ergibt sich zu:
1
V 0
0
Die Rechnung sieht dann wie folgt aus:
1
0
0
0
1
0
3
4
1
2 5
3 7
1 1
Der Punkt ist demnach: P‘(5/7)
0
1
0
3
4
1
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Einbettung des 2D in homogene Koordinaten
Verschiebungsmatrix
1
V 0
0
0
1
0
Vx
Vy
1
Skalierungsmatrix
Sx
S 0
0
0
Sy
0
0
0
1
Rotationsmatrix
cos
R sin
0
sin
cos
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Homogene Koordinaten
Einbettung des 3D in homogene Koordinaten
x
y
z
x
y
z
1
Lineare Algebra – Rechnen mit Matrizen
Verschiebung
Verschiebung in x- und y-Richtung
M Verschiebu
1
0
ng
0
0
0
0
2
1
0
1.5
0
1
0
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Verschiebungsmatrix
Ein Punkt kann durch
Matrixmultiplikation verschoben werden
M Verschiebu
1
0
ng
0
0
0
0
xR
1
0
yR
0
1
zR
0
0
1
Lineare Algebra – Rechnen mit Matrizen
Verknüpfung von linearen Abbildungen
Verschiebung dann Rotation
Rot -> Blau -> Grün
Lineare Algebra – Rechnen mit Matrizen
Verknüpfung von linearen Abbildungen
Rotation dann Verschiebung
Rot -> Blau -> Grün
Lineare Algebra – Rechnen mit Matrizen
Verknüpfung von linearen Abbildungen
Da die Matrixmultiplikation nicht kommutativ
ist, ist die Reihenfolge
der Transformationen
wichtig
Lineare Algebra – Rechnen mit Matrizen
Zusammenfassung – affine Transformationen
Geradlinigkeit,
Parallelität,
Teileverhältnis
bleiben erhalten
Orientierung
bleibt erhalten
Längentreu Winkeltreu
Translation
Ja
Ja
Ja
ja
Rotation
Ja
Ja
Ja
ja
Spiegelung
Ja
Nein
Ja
ja
Skalierung
Ja
Ja
Nein
ja
Scherung
Ja
Ja
Nein
nein
Lineare Algebra – Rechnen mit Matrizen
Aufgabe
Dreieck mit A(1/1), B(3/2), C(2/4)
1.Drehung um 90o
2.Verschiebung um 2 EH in x-Richtung, um -3,5 EH in yRichtung
1.Verschiebung um 2 EH in x-Richtung, um -3,5 EH in yRichtung
2.Drehung um 90o
Führen Sie die beiden Aufgaben in
zwei verschiedenen Koordinatenkreuzen hintereinander aus
Wie lautet jeweils die
Transformationsmatrix für
beide Abbildungen?
Lineare Algebra – Rechnen mit Matrizen
Aufgabe
Dreieck mit A(1/1/-1), B(3/2/1), C(2/4/-2)
1.Drehung um 90o um die z-Achse
2.Verschiebung um 2 EH in x-Richtung, um -3,5 EH in yRichtung und 3 EH in z-Richtung
1.Verschiebung um 2 EH in x-Richtung, um -3,5 EH in yRichtung und 3 EH in z-Richtung
2.Drehung um 90o um die z-Achse
Führen Sie die beiden Aufgaben in
zwei verschiedenen Koordinatenkreuzen hintereinander aus
Wie lautet jeweils die
Transformationsmatrix für
beide Abbildungen?
Lineare Algebra – Rechnen mit Matrizen
Aufgabe
Dreieck mit A(1/1/0), B(3/2/0), C(2/4/0)
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an der Geraden y= a x
1. Betrachte die Gerade y = a x als x‘-Achse eines neuen
rechtwinkligen Koordinatensystems (x‘,y‘), das gegenüber (x,y)
um den Winkel gedreht ist.
2. Spiegelung an der x‘-Achse des neuen Koordinatensystems.
3. Darstellung des gespiegelten Punktes im alten
Koordinatensystem (x,y).
Wir benötigen also drei Matrizen zur Darstellung
der einzelnen linearen Abbildungen.
1.Drehung um T
2. Spiegelung Ts
3. Drehung zurück um - T -
Insgesamt also: T = T Ts T -
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an der Geraden y= a x
T
α
Cos α
Sin α
Sin α
Cos α
T
T=
=
s
T
1
0
Cos α
Sin α
-α
Cos α
- Sin α
Sin α
Cos α
0
- 1
Sin α
Cos α
Cos 2 α - Sin 2 α
2 Sin α Cos α
1
0
Cos α
- Sin α
0
- 1
2 Sin α Cos α
- (Cos
2
α - Sin
2
α)
Sin α
Cos α
Lineare Algebra – Rechnen mit Matrizen
Hausaufgabe 1
Spiegelung der Punkte A(3/1), B(5/2) und C(4/3) an der Geraden
mit der Gleichung y = 1/2 x
0.6
M
0.8
0.8
- 0.6
Mit Hilfe dieser Matrix ergeben sich
folgende Bildpunkte
A(3;1) A‘(2.6 ; 1.8)
B(5/2) B‘(4.6 ; 2.8)
C(4/3) B‘(4.8 ; 1.4)
Lineare Algebra – Rechnen mit Matrizen
Hausaufgabe 1
Spiegelung der Punkte A(3/1), B(5/2) und C(4/3) an der Geraden
mit der Gleichung y = 1/2 x
Lineare Algebra – Rechnen mit Matrizen
Hausaufgabe 2
Spiegelung der Punkte A(3/1), B(5/2) und C(4/3) an der Geraden
mit der Gleichung y = -2 x
M
3
5
4
5
4
5
3
5
Mit Hilfe dieser Matrix ergeben sich
folgende Bildpunkte
A(3;1) A‘(-13/5 ; -9/5)
B(5/2) B‘(-23/5 ; -14/5)
C(4/3) B‘(-24/5 ; -7/5)
Lineare Algebra – Rechnen mit Matrizen
Hausaufgabe 2
Spiegelung der Punkte A(3/1), B(5/2) und C(4/3) an der Geraden
mit der Gleichung y = -2 x
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an der Geraden y= m x
T
α
Cos α
Sin α
Sin α
Cos α
T
T=
=
s
T
1
0
Cos α
Sin α
-α
Cos α
- Sin α
Sin α
Cos α
0
- 1
Sin α
Cos α
Cos 2 α - Sin 2 α
2 Sin α Cos α
1
0
Cos α
- Sin α
0
- 1
2 Sin α Cos α
- (Cos
2
α - Sin
2
α)
Sin α
Cos α
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an der Geraden y= m x
Bezug zur Steigung m der Geraden y = m x (es gilt: tan = m )
cos
1
1 tan
2
sin
tan
1 tan
2
cos sin
2
2
1 m
2
1 m
2
Damit ergibt sich
für die Matrix:
1
1 m
und
2
m
1 m
und
T
2
2 sin cos
1
1 m
2
2m
1 m
1 m 2
2m
2
2
(1 m )
2m
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an einer Geraden
durch den Ursprung mit der
Gleichung
u
x
v
Die Matrix lautet:
S
1
u v
2
2
u2 v2
2u v
2u v
2
2
v u
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an einer Geraden
durch den Ursprung mit der
Gleichung
u
x v
w
Die Matrix lautet:
u2 v2 w2
1
S 2
2u v
2
2
u v w
2u w
2u v
u v w
2
2
2vw
2vw
2
2
2
u v w
2u w
2
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an einer Geraden
m1
durch den Ursprung mit der
x m2
Gleichung
m
3
Die Matrix lautet:
m 12 m 22 m 32
1
S 2
2 m1 m 2
2
2
m1 m 2 m 3
2 m1 m 3
2 m1 m 2
m1 m 2 m 3
2
2
2 m2 m3
2 m2 m3
2
2
2
m1 m 2 m 3
2 m1 m 3
2
Lineare Algebra – Rechnen mit Matrizen
Spiegelung an einer
Ebene durch den
Ursprung mit der
Gleichung
x a
y b 0 a x b y c z 0
z c
Die Matrix lautet:
a2 b2 c2
1
T 2
2ab
2
2
a b c
2ac
2ab
a b c
2
2
2bc
2bc
2
2
2
a b c
2ac
2
Lineare Algebra – Rechnen mit Matrizen
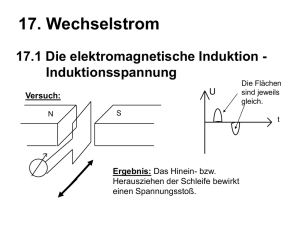
Die Zentralprojektion
Der Effekt bei der Zentralprojektion ist dem des menschlichen
Auges sehr ähnlich. Abgebildete Objekte werden proportional zu
ihrer Entfernung von der Bildebene verkleinert, d.h. entfernt
liegende Körper erscheinen kleiner als näherliegende.
Eigenschaften
Parallele Geraden werden, falls sie nicht parallel zur
Bildebene verlaufen, nicht auf parallele Geraden abgebildet,
sondern laufen in einem Fluchtpunkt zusammen.
Winkel zwischen zwei Geraden werden nur dann
beibehalten, wenn die durch die Geraden definierte Ebene
parallel zur Bildebene liegt.
Entfernungen zwischen verschiedenen Punkten werden in
der Abbildung unterschiedlich verzerrt.
Lineare Algebra – Rechnen mit Matrizen
Die Zentralprojektion
Beispiel:
Zentralprojektion eines achsenparallelen
Würfels der Kantenlänge 2, zentriert um
die z-Achse im Abstand 4 vom Ursprung
auf eine Bildebene im Abstand d = 2.
A(-1/-1/-4)
B(1/-1/-4)
C(1/1/-4)
D(-1/1/-4)
E(-1/-1/-6)
F(1/-1/-6)
G(1/1/-6)
H(-1/1/-6)
M ZentralPro
1
0
0
0
0
0
1
0
0
1
0
-
1
2
0
0
0
0
Lineare Algebra – Rechnen mit Matrizen
Die Zentralprojektion
Lineare Algebra – Rechnen mit Matrizen
Die Zentralprojektion
Tabellen – Trigonometrische Funktionen
0o
Sin
30o
0
45o
60o
90o
2
3
1
1
2
Cos
1
3
0
3
3
2
2
1
2
2
Tan
2
0
2
1
3
Tabellen – Trigonometrische Funktionen
90o
Sin
120o
1
135o
3
0
1
0
2
2
1
2
Tan
180o
2
2
Cos
150o
3
2
3
2
2
-1
3
3
-1
0
Tabellen – Trigonometrische Funktionen
180o
Sin
0
210o
1
2
Cos
Tan
-1
0
225o
240o
2
3
3
2
3
3
2
2
2
1
2
1
270o
-1
0
2
3
Tabellen – Trigonometrische Funktionen
270o
Sin
Cos
-1
300o
0
3
2
330o
1
2
2
2
1
2
3
2
Tan
315o
2
3
-1
360o
0
1
2
3
3
Aufgaben
Matrizenmultiplikation
Wir fragen uns, wieviel Arbeit das Multiplizieren von Matrizen macht. Betrachten Sie
die beiden 4x4 Matrizen M und N.
n 1,1
n 2,1
N
n 3,1
n 4,1
n 1,2
n 1,3
n 2,2
n 2,3
n 3,2
n 3,3
n 4,2
n 4,3
n 1,4
n 2,4
n 3,4
n 4,4
m 1,1
m 2,1
M
m 3,1
m 4,1
m 1,2
m 1,3
m 2,2
m 2,3
m 3,2
m 3,3
m 4,2
m 4,3
a)Wieviel Multiplikationen und wieviel Additionen von Zahlen muss man durchführen,
um einen Zeilenvektor von M mit einem Spaltenvektor von N zu multiplizieren?
b)Wieviel Produkte aus Zeilen- und Spaltenvektor muss man durchführen, um das
Matrixprodukt aus M und N zu berechnen?
c)Schließen Sie aus (a) und (b), wieviel elementare Rechenoperationen (also
Additionen und Multiplikationen von Zahlen) man benötigt, um das Matrixprodukt aus
M und N zu berechnen!
d)Überlegen Sie sich in der gleichen Weise, wieviel Rechenoperationen man benötigt,
um das Produkt von zwei 5x5 Matrizen und zwei 100x100 Matrizen zu berechnen.
e)Überschlagen Sie, wieviel Rechenoperationen man benötigt, um das Produkt von
zwei nxn Matrizen zu berechnen.
Jemand kündigt an, zwei 100x100 Matrizen von Hand miteinander multiplizieren zu
wollen. Als flinker Kopfrechner benötigt er 2 Sekunden pro Rechenoperation. Wie
lange braucht er in etwa für diese Aufgabe, wenn man annimmt, daß er täglich 10
Stunden arbeiten kann?
m 1,4
m 2,4
m 3,4
m 4,4
Aufgaben
Matrizenmultiplikation - Lösung
m 1,1
m 2,1
M
m 3,1
m 4,1
m 1,2
m 1,3
m 2,2
m 2,3
m 3,2
m 3,3
m 4,2
m 4,3
m 1,4
m 2,4
m 3,4
m 4,4
n 1,1
n 2,1
N
n 3,1
n 4,1
n 1,2
n 1,3
n 2,2
n 2,3
n 3,2
n 3,3
n 4,2
n 4,3
n 1,4
n 2,4
n 3,4
n 4,4
a) Es sind jeweils 4 Additonen und 4 Multiplikationen
b)
c)16*4 = 64 Additionen und 16*4=64 Multiplikationen
d) 5x5-Matrix: 25*5=125 Additionen und 25*5=125
Multiplikationen
100x100-Matrix: 100*100*100 = 1 000 000 Additionen und
1 000 000 Multipliaktionen
e) Es sind n3 Additionen bzw. Multiplikationen
Die Zeit beträgt: 2*1 000 000 000/2 = 1 000 000 s 277 h.
Die Person benötigt ungefähr 277 h, das ergibt ca. 28 Tage.
Aufgaben
Matrizenmultiplikation
1
5
A
9
13
Seien A und E die 4x4 Einheitsmatrix gegeben.
a)Berechnen Sie die Matrixprodukte AE und EA
b)Sei E24 die Matrix, die sich ergibt, wenn Sie in der
Einheitsmatrix die zweite und vierte Zeile vertauschen.
Berechnen Sie AE24 und E24A.
c)Sei E23 die Matrix, die sich ergibt, wenn Sie in der
Einheitsmatrix die zweite und dritte Zeile vertauschen.
Berechnen Sie AE23 und E23A.
d)Sei E14 die Matrix, die sich ergibt, wenn Sie in der
Einheitsmatrix die erste und vierte Zeile vertauschen.
Berechnen Sie AE14 und E14A.
e)Fassen Sie Ihre Berechnungen aus (a)-(e) in einer
Vermutung zusammen.
2
3
6
7
10
11
14
15
4
8
12
16
Aufgaben
Matrizenmultiplikation
b)
c)
d)
1 4 3 2
5 8 7 6
9 12 11 10
13 16 15 14
1 2 3 4
13 14 15 16
9 10 11 12
5 6 7 8
1 3 2 4
5 7 6 8
9 11 10 12
13 15 14 16
1 2 3 4
9 10 11 12
5 6 7 8
13 14 15 16
4 2 3 1
8 6 7 5
12 10 11 9
16 14 15 13
13 14 15 16
5 6 7 8
9 10 11 12
1 2 3 4
1
5
A
9
13
2
3
6
7
10
11
14
15
4
8
12
16
Aufgaben
Matrizenmultiplikation
Ein Landwirt düngt seine 3 Felder viermal im Jahr mit 4
verschiedenen Düngemitteln. Im ersten Quartal gibt er von
Düngemittel A 10dz auf Feld 1, 20dz auf Feld 2 und 5dz auf Feld
3. Im zweiten Quartal gibt er von Düngemittel B 8dz auf Feld 1,
12dz auf Feld 2 und 2dz auf Feld 3. Im dritten Quartal gibt er von
Düngemittel C 2dz auf Feld 1, 4dz auf Feld 2 und 0dz auf Feld 3.
Im vierten Quartal gibt er von Düngemittel D 6dz auf Feld 1, 0dz
auf Feld 2 und 1dz auf Feld 3. (Bemerkung: dz = 1
Doppelzentner = 100kg)
Die Düngemittel des Landwirts bestehen aus den Wirkstoffen
Phosphor (P), Kalium (K) und Stickstoff (N). Die Düngemittel
seien dabei wie folgt zusammengesetzt: Mittel A besteht aus
30% P, 20% K und 50% N, Mittel B besteht aus 10% P, 20% K
und 70% N, Mittel C besteht aus 40% P, 10% K und 50% N und
Mittel D besteht aus 30% P, 30% K und 40% N.
Aufgaben
Matrizenmultiplikation
a)Schreiben Sie den obigen Sachverhalt mit Hilfe von Matrizen
übersichtlich auf. Vergessen Sie dabei nicht, anzugeben, wofür
Zeilen, Spalten und Einträge der Matrizen stehen
b)Aus Umweltschutzgründen darf der Landwirt pro Jahr nur eine
bestimmte Menge an Stickstoff auf seine Felder geben.
c)Überlegen Sie sich, wie man berechnen kann, wieviel Stickstoff
im ganzen Jahr jeweils auf die 3 Felder gegeben wurde.
Berechnen Sie für jedes Feld, wieviel dz jedes Wirkstoffs im
ganzen Jahr auf das Feld gegeben wurden. Benutzen Sie dabei
Ihr Wissen über Produktionsmatrizen!
Aufgaben
Matrizenmultiplikation
A
B
C
D
Feld 1
Feld 2
10
20
8
12
2
4
6
0
Feld 3
5
2
0
1
P
K
N
A
30%
20%
50%
B
10%
20%
70%
C
40%
10%
50%
D
30%
30%
40%
Aufgaben
Matrizenmultiplikation
b) Man berechnet:
35*50%+22*70%+6*50%+7*40% = 46 dz
c) Die Zeilen stehen für die unterschiedlichen
Felder, die Spalten für P, K und N.
Also: Auf Feld 1 wurden 6,4 dz Phosphor
aufgebracht
6.4 5.6 14.
8.8 6.8 20.4
2. 1.7 4.3
Aufgaben
Abbildungen durch Matrizen
1.Aufgabe: ( Seite 204 A.6) Gegeben ist die Ebene E mit
1*x – 2*y + 0*z = 0.
a) Bestimmen Sie die Schnittgerade g der Ebene E mit der xy-Ebene.
b) Bestimmen Sie die zur Spiegelung an E gehörende Abbildungsmatrix.
c) Bestimmen Sie die 3x3-Matrix, die die Spiegelung an g in der xyEbene beschreibt.
d) Bestimmen Sie die 2x2-Matrix, die die Spiegelung an g in der xyEbene beschreibt. Vergleichen Sie mit den Matrizen aus den
Teilaufgaben b) und c).
2
a) Die Schnittgerade lautet: x 1
0
3
4
0
b)
5
4
5
5
3
5
0
0
0
1
c)
3
5
4
5
4
5
3
5
0
0
0
0
1
Aufgaben
Abbildungen durch Matrizen
5.Aufgabe: Gegeben ist die Abbildungsmatrix
1
1
T1 2
3
2
2
1
2
2
2
1
a) Bestimmen Sie die Bildpunkte der Punkte A(3/3/0), B(3/-6/3),
C(3/3/-3).
a) A‘(-3/-3/0) B‘(5/-2/5)
C‘(-5/-1/1)
b) Geben Sie zur Spiegelung an der Geraden g:
1
x 0
0
gehörende
Abbildungsmatrix T2 an, und bestimmen Sie die zur Verkettung (zunächst
die zu T1 gehörenden Abbildung und anschließend die Spiegelung an der
Geraden g) gehörende Abbildungsmatrix V.
1
2
2
b)
3
2
3
2
3
3
1
3
2
3
3
2
3
1
3
Übungen zur 1.Klausur
2.Aufgabe: ( Seite 205 A.13) Gegeben sind die Punkte A(0/0/0),
B(-1/-1/4) und C(-1/-4/1)
a) Zeigen Sie, dass das Dreieck ABC gleichseitig ist.
b) Zeigen Sie, dass mit D(-4/-1/1) die Figur ABCD ein regelmäßiges
Tetraeder ist, d.h. eine Figur, die von vier gleichseitigen Dreiecken
begrenzt wird.
d) Bestimmen Sie die Abbildungsmatrix T derjenigen Abbildung, die B
auf C, C auf D, D auf B abbildet. Bestimmen Sie die Fixpunkte dieser
Abbildung.
Lösung: a)Mit Hilfe der Abstandsbeziehung
erhält man: d =
3
d
( x 2 x1 ) ( y 2 y 1 ) ( z 2 z 1 )
2
2
2
b)Zusätzlich müssen noch die anderen Dreiecke auf Gleichseitigkeit
überprüft werden, nämlich: ABD BCD und CAD
c)Die Abbildungsmatrix lautet:
0 1
0 0
1 0
0
1
0
2
Übungen zur 1.Klausur
8.Aufgabe: Gegeben sind die Punkte A(-2/-5/-5), B(1/-2/7),
C(1/7/-2).
a) Geben Sie eine Parameterdarstellung und eine Normalenform
der durch A, B und C festgelegten Ebene E an.
b) Zeigen Sie, dass das Dreieck ABC gleichseitig ist, und
bestimmen Sie den Schwerpunkt S des Dreiecks ABC.
c)Bestimmen Sie alle Punkte D so, dass A, B, C, D die Eckpunkt
eines regelmäßigen Tetraeders bilden.
4 1
8
1
d)Zeigen Sie, dass die durch die Matrix T 1 4 8
9
4
vermittelte Abbildung jeden Punkt der Geraden g:
7
4
5
x 1
1
auf sich abbildet. Wie bildet die zu T gehörige Abbildung das
Dreieck ABC ab?
Übungen zur 1.Klausur
Lösung:
Die Gleichseitigkeit wird mit Hilfe der Abstandformel
d
( x 2 x1 ) ( y 2 y 1 ) ( z 2 z 1 )
2
2
2
berechnet. Es ergibt sich:
d)
Man sieht, dass man wieder den Vektor (-5,1,1) erhält.
9
2
Übungen zur 1.Klausur
Lösung:
d) Für die Bilder der Punkte A, B und C erhält man:
A(-2/-5/-5) A‘(1/-2/7)
B(1/-2/7) B‘(1/7/-2)
C(1/7/-2) C‘(-2/-5/-5)