Physik I - Teil 1 - Homepage von Florian Berthoud
Werbung

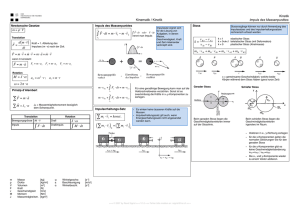
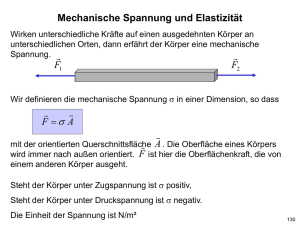
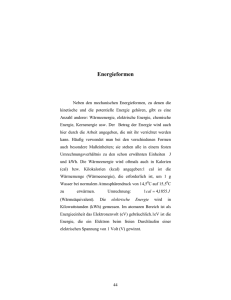
PHYSIK I – TEIL 1 Formelsammlung: Florian Berthoud, XB Mechanik starrer Körper Räumliche Bewegung: Beschleunigung: Gleichmässig beschleunigte Bewegung: Schiefer Wurf: at vt st v v0 a * t 1 a *t2 2 2 v * sin 2 0 g s s 0 v0 * t v02 * sin 2 xmax g x 2v * sin t max 0 v0 g y max Dynamik des Massenpunktes: Actio = Reactio F12 F21 Kraft, Gewichtskraft: Gleitreibungskraft: Haftreibungskraft: Federkraft: Impulserhaltungssatz: Kraft & Impuls: FG m * g F m*a FR G * FN FR H * FN FF D * y D * (l l 0 ) p F p p m*v t ptot pi 0 i Arbeit: Wirkungsgrad: W F * s F * s * cos sB Wauf W AB F * ds Wnutz sA m: Masse [m] = kg F: Kraft [F] = kgms-2 = N g: Fallbeschleunigung = 9.81 ms-2 G: Gleitreibungszahl H: Haftreibungszahl D: Federkonst. [D] = Nm-1 l0: entspannte Feder l: gespannte Feder p : Impuls [p] = kgms-1 = Ns ptot: Gesamtimp. im abgeschl. System W : Arbeit [W] = Nm = J = Ws WAB : verrichtete Arbeit von A nach B Wauf : aufgenommene Arbeit Wnutz: nutzbare, abgegebene Arbeit : Wirkungsgrad E W AB 1 kinetische & potentielle E k mv 2 E p mgh 2 Energie: 1 2 E der gespannten Feder: E F Dy 2 Energieerhaltungssatz: Etot Ei 0 E : Energie Leistung: P : Leistung Energie und Arbeit: i P W AB Fv t Elastischer & unelastischer Stoss: vollkomen v v1 v 2 unelastischer Stoss: v m1v1 m 2 v 2 m1 m 2 E Def Erstelldatum: 08.04.17 04:15 m1 m 2 (v1 v 2 ) 2 2 * (m1 m 2 ) s: Strecke; [s] = m v: Geschwindigkeit; [v] = ms-1 a: Beschleunigung [a] = ms-2 : Abschusswinkel [] = Grad [E] = Nm = J = Ws h: Höhe über gewähltem Bezugsniveau g muss konstant sein D: Federkonstante y: Längenänderung Etot: Ges.energie im abgeschl. System Ei : Teilenergie [P] = Js-1 = W (Watt) v1, v2 : Geschw. vor dem Stoss v'1 , v'2: Geschw. nach dem Stoss EDef : Deformationsenergie nach dem Stoss EDef = EKtot – EK'tot Seite 1 PHYSIK I – TEIL 1 Formelsammlung: vollkommen elastischer Stoss: Der Rakentenantrieb: Beschleunigung: Geschwindigkeit: Gravitation: Gravitationskraft: minimale Abschussgeschw. Arbeit im Gravitationsfeld: (m1 m2 )v1 2m2 v 2 m1 m2 (m m1 )v 2 2m1v1 v 2 2 m1 m2 v1 EDef = 0 dv FSchub Fext dt m dv u aus dm a g dt m dt manf vend v anf u aus ln gt v mend FSchub Fext uaus dm/dt manf mend tv a G m1 * m2 r2 G m r v0 M 7.9km / s r 1 1 W * M * m W r1 r2 M v0 Zentrifugalkraft / Corioliskraft: Zentripetalkraft mv 2 FZ m 2 r p (wirkt nach innen) / r Zentrifugalkraft (aussen) Corioliskraft/ Coriolisbeschleunigung: Coriolisablenkung: FC 2mv Satz von Steiner: t t t s 2f r J A J S mr 2 Schwingungsdauer um das Trägheitsmoment: T Drehzahl /Drehwinkel: Drehimpuls: Kreisfrequenz der Präzession: Erstelldatum: 08.04.17 04:15 : Schubkraft : externe Kräfte = g = 9.81 ms-2 : FSchub/ (dm/dt) [uaus] = ms-1 : Verbrennungsgeschwindigkeit : Anfangsmasse der Rakete : Endmasse = Nutzlast : totale Verbrennungszeit : Gravitationskraft [G] = kgms-2 = N : Gravitationskonst. = 6.67 *10-11Nm2kg-2 : Massen der jewiligen Planeten/Körper : Abstand der Körper [r] = m : minimale Abschussgeschwindigkeit dass der Körper nicht auf die Erde zurückfällt : Arbeit bei der Bewegung im Schwerefeld : Masse des von r1 zu r2 bewegten Körpers m: Masse des Körper v : Geschw. des Körpers r: Radius der Kreisbahn : Winkelgeschw. des Körpers p : Impuls des Körpers [m] = kg [v] = ms-1 [r] = m [] = s-1 [p] = Ns a C 2v : Winkelgeschw. des Systems [] = s-1 1 s v * t 2 a C * t 2 s: örtliche Verschiebung des Auftreffens 2 Dynamik der Drehbewegung: Drehmoment: M l F J * Winkelbeschleunigung: Florian Berthoud, XB JA 1 f mgr L J * r p rmg rmg L J M : Drehmoment l : Hebelarm : Winkelbeschleunigung : Winkelgeschwindigkeit : Drehwinkel [M] [r] [] [] [] = Nm =m = s-2 = s-1 = rad =1 JS : Trägheitsmoment im Schwerpunkt [J] = kgm2 JA : Trägheitsmoment in einer verschobenenAchse r : Abstand der zueinander paralellen Achsen m : Masse des Körpers [m] = kg f : Frequenz [f] = Hz = s-1 L : Drehimpuls [L] = Nms : Winkelgeschw. der Präzession [] = s-1 r : Radius des drehenden Körpers [r] = m Seite 2 PHYSIK I – TEIL 1 Formelsammlung: Florian Berthoud, XB Mechanik deformierbarer Körper: Dehnung: Spannungs-Dehnungskurve: Spannung bis A A: bis B B: bis C C: bis D O A B C Dehnung Hooksche Gesetz: Änderung der Querschnittsabmessung: relative Volumenänderung: l F l E A* E d l d l V 1 2 V [] [] [E] [A] [F] [] =1 = Nm-2 = Nm-2 = m2 =N =1 : Schubspannung : Scherungswinkel G : Scher- oder Schubmodul A : Fläche F : Kraft, paralell zur Fläche a : max. mögliche Auslenkung l : Länge des Körpers [] [] [G] [A] [F] [a] [l] = Nm-2 = rad = 1 = Nm-2 = m2 =N = m3kg-1 =m 2l * M Gr 4 M Gr 4 D 2l : Drillwinkel [] M : Drehmoment [M] G : Torsions- = Schubmodul [G] r : Radius des Zylinderquerschnittes l : Länge des Zylinders [l] = rad = 1 = Nm = Nm-2 V * p V p V 3 (1 2 ) V E p E = m2N-1 = Nm-2 = Nm-2 =1 G Schubmodul: G Torsion (Drillung): Drillwinkel: Richtmoment: Kompression (allseitiger Druck): relative Volumenänderung: Erstelldatum: 08.04.17 04:15 D: : Dehnung, rel. Längenänd. : Spannung E : Elastizitätsmodul A : Querschnittsfläche F : Kraft : Poisson-Zahl ( 0.2 bis 0.5) Scherung : maximale Auslenkung: D gilt das Hooksche Gesetz Proportionalitätsgrenze ist die Dehnung reversibel Elastizitätsgrenze bleibt eine Restdeformation übrig Fliessgrenze ohne mehr Spannung weitere Dehnung möglich Bruchgrenze / Zerreissgrenze F A E 2(l ) a max F *l3 3E * J A : Kompressibilität : hydrostatischer Druck : Elastizitätsmodul : Poisson-Zahl ( 0.2 bis 0.5) [] [p] [E] [] =m Seite 3