2. TEM-Felder auf idealen Leitungen
Werbung

Theorie
der
Hochfrequenzleitungen
von Arnold Ziermann
Inhaltsverzeichnis
Seite
1.
2.
2.1
2.2
2.3
3.
3.1
Einleitung
TEM-Felder auf idealen Leitungen
Das elektrische Feld und der Kapazitäsbelag
Das magnetische Feld und der Induktivitätsbelag
Vergleich der transversalen Strukturfunktionen
Spannung und Strom auf der Leitung
Die partiellen Differentialgleichnungen für
Spannung und Strom
3.2 Ersatzschaltbilder für kurze Leitungen
3.3 Der Verlauf von Spannung und Strom längs der
Leitung
1
7
11
22
29
35
35
39
44
1
1. Einleitung
Die Elektrotechnik kennt die passiven, linearen Bauelemente Widerstand, Spule und Kondensator. Geht man von deren Idealverhalten aus, ist beim Widerstand der Augenblickswert der
Spannung u zwischen den Anschlussklemmen proportional zum Augenblickswert des
Stromes i, der durch den Widerstand fließt; bei der Spule ist sie proportional zur Ableitung
des Stromes nach der Zeit; beim Kondensator ist umgekehrt der Strom proportional zur
zeitlichen Ableitung der Klemmenspannung. Die Proportionalitätsfaktoren R, L und C sind
bei dem angesprochenen Idealverhalten reell und positiv und unabhängig von den Zustandsgrößen u und i sowie von der Zeit t; sie werden als Widerstand 1 , Induktivität und
Kapazität bezeichnet. Die Beziehung zwischen Spannung und Strom lautet beim idealen
Widerstand in mathematischer Formulierung also
u (t ) = R ⋅ i (t ) ,
bei der idealen Spule
u (t ) = L ⋅
di (t )
dt
und beim idealen Kondensator
i (t ) = C ⋅
du (t )
dt
mit konstanten, reellen und positiven Werten für den Widerstand R, die Induktivität L und die
Kapazität C. Man erkennt aus diesen Zusammenhängen rein formal, d. h. auch ohne auf den
physikalischen Wirkungsmechanismus der Bauelemente eingehen zu müssen, dass der ideale
Widerstand ein rein dissipatives Element ist, denn die von ihm aufgenommene Leistung
p(t ) = u( t ) ⋅ i( t ) = R ⋅ i( t )
2
ist zu jedem Zeitpunkt positiv oder, etwas anders formuliert, zu keinem Zeitpunkt negativ und
verschwindet nur, wenn der Strom den Wert Null annimmt. Es fließt also zu keinem
Zeitpunkt Energie vom Widerstand zurück zum Generator bzw. in das speisende Netz; sie
wird vollständig im Widerstand „verbraucht“, d. h. in Wärme umgewandelt, dissipiert.
Bei der idealen Spule ist, vom Zustand i = 0 zum Zeitpunkt t = 0 ausgehend, die aufgenommene Energie
t
t
0
0
W mag (t ) = ∫ u (t ′) ⋅ i (t ′)dt ′ = ∫ L ⋅ i (t ′) ⋅
di (t ′)
1
2
dt ′ = L ⋅ i (t )
dt ′
2
stets positiv und verschwindet nur, wenn der Strom den Wert Null annimmt, bzw. wenn die
Spule wieder vollkommen vom speisenden Netz getrennt ist. Es verbleibt dann keine Energie
in der Spule; sie wurde nur vorübergehend in ihr gespeichert und fließt vollständig in das
speisende Netz zurück. Die Spule ist demnach ein reiner Energiespeicher.
1
Im Gegensatz zum angelsächsischen Schrifttum wird im Deutschen, rein sprachlich gesehen, beim Widerstand
nicht zwischen dem Bauelement (resistor) und dem das Bauelement beschreibenden Parameter (resistance)
unterschieden. Aus diesem Grunde wurde für das Bauelement im Deutschen der Begriff Rheostat vorgeschlagen,
der sich aber nicht allgemein durchgesetzt hat. Auch bei der Spule spricht man oft, die Begriffe vermengend, von
einer Induktivität und beim Kondensator von einer Kapazität, wenn man eigentlich das jeweilige Bauelement
meint. Bei den idealisierten Bauelementen, den so genannten Netzwerkelementen, benutzt man diese Begriffe
auch, um den Unterschied zum technischen Bauelement hervorzuheben.
2
Da die in ihr gespeicherte Energie allein von der Größe des Stromes i abhängt, handelt es sich
bei der idealen Spule um einen Speicher für magnetische Energie, denn die Stärke des
magnetischen Feldes ist dem Strom i proportional.
Bei dem idealen Kondensator ist die von diesem aufgenommene Energie, vom ungeladenen
Zustand u = 0 zum Zeitpunkt t = 0 ausgehend,
t
t
0
0
Wel (t ) = ∫ u (t ′) ⋅ i (t ′)dt ′ = ∫ C ⋅ u (t ′) ⋅
du (t ′)
1
2
dt ′ = C ⋅ u (t )
dt ′
2
ebenfalls stets positiv und wird nur zu Null, wenn der Kondensator wieder vollständig
entladen ist, seine Klemmenspannung u also verschwindet. Auch bei ihm handelt es sich um
einen reinen Energiespeicher, denn er behält nach seiner Entladung nichts von der aus dem
speisenden Netz aufgenommenen Energie zurück. Die im idealen Kondensator gespeicherte
Energie ist eine rein elektrische Energie; sie hängt allein von der Spannung u ab, die
proportional zur Stärke des elektrischen Feldes ist.
Bisher haben wir mehrfach betont, dass es sich bei den betrachteten Bauelementen um Idealisierungen handelt. In der technischen bzw. physikalischen Wirklichkeit kann es das beschriebene Verhalten im strengen Sinne jedoch nicht geben, denn der durch einen Widerstand
fließende Strom z. B. erzeugt wie bei einer Spule auch beim Widerstand ein magnetisches
Feld, das magnetische Energie enthält, was in einem Ersatzschaltbild, das das Klemmenverhalten des technischen Bauelementes Widerstand beschreibt, durch eine so genannte
parasitäre Induktivität näherungsweise berücksichtigt werden kann; sie ist in Reihe zu dem
Widerstand zu schalten. Das Gleiche gilt für den Strom, der durch die Anschlussleitungen
eines Kondensators fließt. Ferner ist die Klemmenspannung beim Widerstand und auch bei
einer Spule wie bei einem Kondensator mit einem elektrischen Feld verbunden, das wie bei
diesem elektrische Energie enthält, was in einem Ersatzschaltbild näherungsweise durch eine
parasitäre Kapazität berücksichtigt werden kann, die parallel zum Widerstand bzw. zur
Spule zu schalten ist. Schließlich erfordern die bei den beiden Energiespeichern auch noch
vorhandenen Verluste eine Erweiterung des jeweiligen Ersatzschaltbildes um geeignet
angeordnete Widerstände.
Nun sind die beschriebenen Phänomene sicher keine hochfrequenztechnische Besonderheit.
Charakteristisch für die Hochfrequenztechnik ist jedoch, dass sie im Gegensatz zum niederfrequenten Bereich der Elektrotechnik eine entscheidende Rolle spielen können, denn die
Impedanzen der in Serie geschalteten parasitären Induktivitäten nehmen mit der Frequenz zu
und können bei genügend hoher Frequenz die Impedanz des reinen Widerstandes bzw. die des
reinen Kondensators sogar übersteigen, so dass das Bauelement seine charakteristischen
Eigenschaften verliert. Ebenso nimmt die durch die parasitäre Kapazität bedingte Paralleladmittanz mit der Frequenz zu, so dass der Widerstand (oder die Spule) durch diese quasi
überbrückt wird. Eine Aufgabe der Hochfrequenztechnik besteht daher darin, durch entsprechende Gestaltung der Bauelemente die Wirkung dieser störenden Effekte zu vermeiden
bzw. deren Einfluss zu möglichst hohen Frequenzen hin zu verschieben.
Neben diesen Erscheinungen gibt es aber noch einen weiteren Grund, weswegen die Hochfrequenztechnik einen besonderen Platz innerhalb der Elektrotechnik einnimmt: Die Elektrotechnik wird beherrscht von den Maxwellschen Gleichungen. Diese lauten, in Differentialform dargestellt,
r
r r ∂D
(1.1)
rot H = S +
∂t
und
3
r
r
∂B
.
rot E = −
∂t
r
(1.2)
r
r
Darin bedeuten B und D die Vektoren für die magnetische bzw. elektrische Flussdichte, S
r
r
den Vektor für die elektrische Stromdichte und E und H die Vektoren für die elektrische
bzw. magnetische Feldstärke.
Die Spannung zwischen zwei Punkten im Raum (und damit auch zwischen den zwei Klemmen eines Bauelmentes) ist die Differenz der elektrischen Potentiale, die diese beiden Punkte
annehmen. Das elektrische Potential seinerseits ist das Arbeitsintegral über die elektrische
r
Feldstärke E . Dieses Wegintegral ist jedoch nur dann unabhängig von dem gewählten Integrationsweg und damit (bis auf eine Konstante) auch eindeutig definierbar, wenn die Rotation
der elektrischen Feldstärke identisch verschwindet. Der zweiten Maxwellschen Gleichung
(Gl. (1.2)) entnehmen wir jedoch, dass dies exakt nur bei Gleichfeldern der Fall ist, d. h. bei
r
einer zeitlich konstanten magnetischen Flussdichte B . Für Wechselfelder sind Spannungen
demnach streng genommen gar nicht definierbar. Bei der so genannten quasistationären
Näherung geht man, um auch bei Wechselfeldern mit Spannungen rechnen zu können, davon
aus, dass der Term auf der rechten Seite von Gl. (1.2), außer in begrenzten Raumbereichen,
vernachlässigt werden kann. Bereiche mit besonders starken magnetischen Feldern treten
z. B. in Spulen und in elektrischen Maschinen auf, in denen besonders hohe Ströme fließen
bzw. wo deren Wirkung durch viele Windungen verstärkt wird und wo die magnetische Flussr
dichte B durch Materialien mit einer hohen Permeabilität μ (magnetische Leitfähigkeit)
große Werte annehmen kann. Diese Raumbereiche werden bei der Betrachtung des
elektrischen Feldes ausgeschlossen, so dass ein Gebiet mit (näherungsweise) verschwindender
Rotation der elektrischen Feldstärke übrig bleibt. Das elektrische Potential in diesem
verbleibenden Gebiet ist dann bis auf eine Konstante, die bei der Berechnung einer Spannung
durch die Bildung der Differenz zweier Potentiale ja wieder herausfällt und daher ohne
Einfluss bleibt, eindeutig bestimmt. Allerdings muss das abgegrenzte Gebiet, wie Mathematiker es formulieren, einfach zusammenhängend sein; deshalb sind ringförmige Bereiche wie
magnetische Kreise mit entsprechender Vorsicht zu behandeln.
r
In der Hochfrequenztechnik ist der Term ∂ B ∂ t jedoch nicht aufgrund der großen Flussr
dichte B , sondern wegen der schnell ablaufenden Vorgänge nicht mehr vernachlässigbar.
Weil diese in allen Raumbereichen gleich schnell ablaufen, lässt sich bei hohen Frequenzen
auch kein Raumbereich festlegen, in dem die Änderung der Flussdichte von vornherein
vernachlässigt werden kann. Von der Definierbarkeit der elektrischen Spannung im Sinne
einer Potentialdifferenz kann deshalb i. a. auch nicht mehr die Rede sein. Ausgangspunkt
unserer Betrachtungen müssen daher die sich gegenseitig durchdringenden elektrischen und
magnetischen Felder sein, die durch die Maxwellschen Gleichungen beschrieben werden. Die
elektrischen Bauelemente sind in der Regel aber Gebilde mit komplizierten geometrischen
Formen, die sich i. a. einer exakten analytischen Behandlung entziehen. Aus diesem Grunde
behandeln wir hier eine einfache Struktur, die so genannte homogene Leitung; auf ihr ist der
Zusammenhang zwischen den beiden gleichzeitig auftretenden Wechselfeldern relativ leicht
überschaubar. Wegen der auch guten technischen Beherrschbarkeit der Leitungen und
Leitungsstrukturen haben sie in der Hochfrequenztechnik eine besondere praktische Bedeutung. Bei der Beschreibung der Leitung beginnen wir, wie eingangs bei den passiven Bauelementen Widerstand, Spule und Kondensator, auch hier mit einer Idealisierung, mit der so
genannten idealen Leitung.
Zur Berechnung der Felder auf der idealen Leitung gehen wir, wie oben bereits betont, von
den Maxwellschen Gleichnungen aus, die wir jedoch wegen der größeren Anschaulichkeit in
4
Integralform anwenden werden. Man erhält sie dadurch, dass man die Normalkomponenten 2
der Größen in den beiden Gl. (1.1) und (1.2) über eine reguläre Fläche A mit der Randkurve C
integriert und auf der jeweils linken Seite der Gleichungen den Stokesschen Satz anwendet.
Man erhält auf diese Weise aus Gl. (1.1) den Durchflutungssatz
r
r r
r r
∂D r
(1.3)
∫C H ⋅ t d s = ∫A S ⋅ n d A + ∫A ∂ t ⋅ n d A
und aus Gl. (1.2) das Induktionsgesetz
r
r r
∂B r
d r r
E
⋅
t
s
=
−
⋅
n
A
=
−
B ⋅nd A,
d
d
∫C
∫A ∂ t
d t ∫A
(1.4)
wobei wir ortsfeste, d. h. nicht bewegte Flächen vorausgesetzt haben, was es ermöglicht hat,
die zeitliche Ableitung vor das Integral zu ziehen.
Wenn man in diesen beiden Gleichungen die reguläre Randkurve C auf einen Punkt zusammenzieht, wird das Linienintegral auf der linken Seite der Gleichungen zu Null, da die Länge
der Randkurve auf den Wert Null schrumpft. Die Integrationsfläche A geht dabei in eine
geschlossene Hülle H über; aus Gl. (1.3) erhält man auf diese Weise das Kontinuitätsgesetz
für elektrische Ladungen, das auch als Ladungserhaltungsgesetz bezeichnet wird:
r
r r
r r
∂D r
d r r
(1.5)
0= ∫S ⋅nd A+ ∫
⋅nd A= ∫S ⋅nd A+
D ⋅ n d A.
d t ∫H
∂t
H
H
H
Es besagt, dass sich die elektrische Ladung
r r
Q = ∫D⋅nd A
H
in einem räumlichen Gebiet G nur dadurch ändern kann, dass von außen durch die Hüllfläche
H hindurch elektrische Ladung in das Innere des Gebietes oder aus ihm heraus transportiert
wird; sie kann also nicht aus dem Nichts heraus entstehen oder im Nichts verschwinden.
Aus Gl. (1.4) ergibt sich auf die gleiche, oben beschriebene Weise
r
∂B r
d r r
⋅nd A=
B ⋅ n d A,
0=∫
∫
∂
t
t
d
H
H
(1.6)
woraus folgt, dass die magnetische Flussdichte keine Quellen besitzt, magnetische Ladungen
also identisch gleich Null sind:
r r
B
(1.7)
∫ ⋅nd A = 0.
H
Das gilt für alle möglichen regulären Hüllflächen H, woraus
r
div B = 0
(1.8)
folgt 3 . Der Vollständigkeit halber sei erwähnt, dass aus Gleichung (1.5), die ebenfalls für
beliebige reguläre Hüllen gilt, das Ladungserhaltungsgesetz in differentieller Form
2
Normal bedeutet senkrecht zur gewählten Integrationsfläche A.
Zunächst folgt nur, dass die Divergenz zeitlich konstant ist; zusätzlich muss man noch annehmen, dass es einen
Zeitpunkt t gegeben hat, zu dem sich keine magnetische Ladung in dem umschlossenen Gebiet befand, der z. B.
vor dem Einschalten des Stromes oder vor dem Heranführen eines Dauermagneten lag, einen Zeitpunkt also, zu
dem in dem betrachteten Gebiet kein magnetisches Feld existiert hat.
3
5
r dρ
div S +
=0
dt
(1.9)
r
folgt, wobei die Quellendichte der elektrischen Flussdichte D definitionsgemäß gleich der
elektrischen Ladungsdichte ρ ist,
r
div D = ρ .
(1.10)
Die differentielle Form des Gesetzes über die Erhaltung der Ladung Gl. (1.9) lässt sich auch
unmittelbar aus Gl. (1.1) durch Bildung der Divergenz gewinnen.
Das Gesetz der Energieerhaltung, das man aus der Mechanik kennt und das wir eingangs auf
die konzentrierten Bauelemente angewendet haben, lässt sich auch für das elektromagnetische
Feld ableiten. Dazu geht man davon aus, dass die Energiedichte des elektrischen Feldes wie
im statischen Fall durch
r
1
wel = ε ⋅ E 2
(1.11)
2
beschrieben wird und die des magnetischen Feldes durch
r
1
wmag = μ ⋅ H 2 .
2
(1.12)
Die zeitliche Änderung der gesamten Energiedichte ist dann
r
r ⎞
1
∂w ∂
∂ ⎛1
wel + wmag = ⎜ ε ⋅ E 2 + μ ⋅ H 2 ⎟ .
=
2
∂t ∂t
∂t ⎝ 2
⎠
r
r
r
r
r ∂E
r ∂H r ∂D r ∂B
.
= εE ⋅
+ μH ⋅
=E⋅
+H⋅
∂t
∂t
∂t
∂t
(
)
Mit Gl. (1.1) und (1.2) wird daraus
r
r
r
r
∂w r
= E ⋅ − S + rot H + H ⋅ − rot E ,
∂t
r r
r
r r
r
= − E ⋅ S − H ⋅ rot E − E ⋅ rot H .
(
)
(
)
)
(
Dies lässt sich umformen in
r r ∂w
r r
E⋅S +
= − div E × H .
∂t
(
)
(1.13)
Integrieren wir nun auf beiden Seiten dieser Gleichung über ein räumliches Gebiet G mit der
regulären Hüllfläche H und wenden auf der rechten Seite den Gaußschen Satz an, erhalten wir
r r
r r
d
r
E
(1.14)
∫ ⋅ S d V + dt ∫ w d V = ∫ E × H ⋅ (− n ) d A .
G
G
H
r
r
Gilt für die Stromdichte innerhalb des Gebietes G die Beziehung S = κ E , dann stehen auf der
r
linken Seite die durch κ E 2 erzeugten Verluste in dem Gebiet G und die zeitliche Zunahme
der elektrischen und magnetischen Energie; beide werden durch den auf der rechten Seite von
Gl. (1.14) stehenden Energiefluss durch die Hüllfläche H hindurch in das Innere des Gebietes
G hinein gedeckt. Der diese Energieströmung beschreibende Vektor wird als Poyntingvektor
r
S P bezeichnet,
(
)
6
r
r r
SP = E × H .
(1.15)
Gleichung (1.14) gibt also das Energieerhaltungsgesetz für elektromagnetische Felder wieder;
Gl. (1.13) ist sein Pendant in differentieller Form.
Nach dieser Aufarbeitung der erforderlichen feldtheoretischen Grundlagen werden wir im
Folgenden Felder auf idealen Leitungen untersuchen. Was wir dabei unter einer idealen
Leitung verstehen, werden wir im folgenden Abschnitt durch Definitionen festlegen und uns
dabei zunächst auf rein transversale Felder beschränken.
7
2. TEM-Felder auf idealen Leitungen
Wie wir in der Einleitung bereits dargelegt haben, kann die Existenz einer Spannung im Sinne
einer Potentialdifferenz im Bereich der Hochfrequenztechnik nicht ohne Weiteres vorausgesetzt werden. Um den Spannungsbegriff bei Leitungen dennoch, wenn auch nur mit eingeschränkter Bedeutung, verwenden zu können, beschränken wir uns im Folgenden zunächst
darauf, so genannte TEM-Felder auf idealen Zweidrahtleitungen zu beschreiben. Bei dem
auch im angelsächsischen Schrifttum verwendeten Akronym TEM steht „T“ für transversal,
„E“ für elektrisch und „M“ für magnetisch; wir behandeln also nur rein transversale
elektromagnetische Felder. Bevor wir jedoch an die Beschreibung dieser Felder gehen,
müssen wir noch festlegen, was wir unter einer idealen Leitung verstehen wollen.
Ideale Leitungen seien durch folgende Eigenschaften definiert:
Sie besitzen ein kausales (K), lineares (L), zeitunabhängiges (Z), isotropes (I),
homogenes (H) und verlustfreies (V) Dielektrikum, verlustfreie Leiter und haben
eine geschirmte, zylindrische Struktur.
Diese Begriffe sollen im Folgenden näher erläutert werden.
(K) Unter kausal verstehen wir, dass man im Prinzip zwischen Ursache und
Wirkung unterscheiden kann. Fasst man wie in der Mechanik die Kraft als Ursache
der Bewegung auf, dann ist die elektrische Feldstärke, die ja ein Maß für die auf
einen Ladungsträger wirkende Kraft ist, die Ursache für dessen Bewegung bzw. für
die Verschiebung eines gebundenen Ladungsträgers aus seiner Ruhelage. Die Verschiebung der elektrischen Ladungsträger aus ihrer Ruhelage wiederum bewirkt die
elektrische Flussdichte; das bedeutet, dass die elektrische Feldstärke Ursache für die
elektrische Flussdichte 1 ist. Entsprechend ist die magnetische Flussdichte ein Maß
für die Lorentzkraft und daher Ursache für die Ausrichtung der magnetischen Dipole.
Die magnetische Feldstärke ist daher ein Maß für den Grad der Ausrichtung der
magnetischen Dipole im Raum und stellt somit die Wirkung 2 dar.
(L) Linear bedeutet, dass das so genannte Superpositionsprinzip gilt, das wir folgendermaßen definieren können: Erzeugen zwei getrennt wirkende Ursachen jeweils
eine bestimmte Wirkung, erzeugen sie, gemeinsam wirkend, die Summe der beiden
Teilwirkungen. Formal dargestellt gilt:
Aus f 1 (t ) → g 1 (t ) und f 2 (t ) → g 2 (t ) folgt f 1 (t ) + f 2 (t ) → g 1 (t ) + g 2 (t ) .
(Z) Zeitunabhängig bedeutet, dass eine um eine bestimmte Zeitspanne τ verschobene, im Übrigen aber unveränderte Ursache f ( t ) eine bis auf die entsprechende Zeitverschiebung unveränderte Wirkung g ( t ) hervorruft. Formal ausgedrückt heißt dies:
Aus f (t ) → g (t )
folgt
f (t + τ ) → g (t + τ ) .
(I) Isotropie bedeutet, dass die Eigenschaften des Dielektrikums unabhängig von der
Richtung des anregenden Feldes sind. Aus ihr folgt, dass die Vektoren für die elektrische Feldstärke und für die elektrische Flussdichte stets einander parallel sind. Das
1
Genau genommen gilt dies nur für den Anteil an der elektrischen Flussdichte, der durch die Verschiebung von
Ladungsträgern verursacht wird, d. h. für die so genannte elektrische Polarisation.
2
Für die folgende Argumentation ist es im Prinzip jedoch gleichgültig, ob man, wie wir es in Anlehnung an
SOMMERFELD bzw. MIE (siehe [2], S.10) dargelegt haben, die magnetische Flussdichte als Ursache für die
magnetische Feldstärke auffasst oder ob man umgekehrt, der Namensgebung folgend, die magnetische Feldstärke als Ursache für die magnetische Flussdichte ansieht.
8
Gleiche gilt für die Beziehung zwischen den Vektoren der magnetischen Flussdichte
und der magnetischen Feldstärke.
(H) Homogenität bedeutet, dass die Eigenschaften des Dielektrikums unabhängig
vom Ort sind.
(V) Verlustfreiheit bedeutet, dass das Dielektrikum ein reiner Energiespeicher ist.
Aus ihr folgt, dass das Dielektrikum kein Gedächtnis besitzt, d. h. dass nach dem
Verschwinden der Ursache auch keine Wirkung mehr vorhanden ist, die Ursache
also nicht nachwirkt. Die elektrische Flussdichte folgt damit unmittelbar der
elektrischen Feldstärke und die magnetische Feldstärke unmittelbar der magnetischen Flussdichte. Damit haben Flussdichte und Feldstärke bei Medien, die zusätzlich linear sind, jeweils den gleichen zeitlichen Verlauf.
Ohne näher auf Begründungen einzugehen, stellen wir fest, dass sich aus den oben aufgezählten Eigenschaften zwischen der Feldstärke und der Flussdichte beim elektrischen und
beim magnetischen Feld die einfachen Zusammenhänge
r r
r r
D(r , t ) = ε E (r , t )
(2.1)
und
r r
r r
B(r , t ) = μ H (r , t )
(2.2)
ergeben; die reellen, positiven und skalaren Koeffizienten ε und μ werden nach DIN 1304 und
1324 Teil 1 und 2 als Permittivität bzw. Permeabilität bezeichnet; sie sind konstante
Größen, d. h. sie sind unabhängig vom Ort ݎԦ, von der Zeit t und von der Stärke der Anregung.
Bei dieser Darstellung wurde noch von einer weiteren Eigenschaft Gebrauch gemacht, die
man jedoch nicht als spezielle Materialeigenschaft ansehen kann und von grundlegenderer
Bedeutung ist. Gemeint ist das so genannte Nahwirkungsgesetz. Es besagt, am Beispiel des
elektrischen Feldes formuliert, dass die elektrische Flussdichte an einem bestimmten Ort nur
von der elektrischen Feldstärke am gleichen Ort abhängt, nicht aber von der elektrischen
Feldstärke der näheren oder weiteren Umgebung. 3
Die Verlustfreiheit der Leiter bewirkt, dass die elektrische Stromdichte aus dem Inneren
der Leiter in eine dünne Schicht an deren Oberfläche verdrängt wird. Die elektrische und
magnetische Feldstärke im Inneren der Leiter wird dadurch zu Null.4 Da sowohl die
Tangentialkomponente der elektrischen Feldstärke als auch die Normalkomponente der
magnetischen Flussdichte an einer Grenzfläche zweier Materialien stetig ist, sind diese
Feldkomponenten an der Oberfläche der Leiter ebenfalls gleich Null, auch wenn man sich der
Leiteroberfläche von der Seite des Dielektrikums her nähert; es gilt also im Dielektrikum
und
r
r
Etan = 0
(2.3)
r
r
BN = 0
(2,4)
an der Leiteroberfläche.
Weiter wollen wir noch ein Wort über die zylindrische Struktur der Leitung verlieren.
3
Ferner wurde eine unmittelbare Verkopplung des elektrischen und magnetischen Feldes durch das Dielektrikum ausgeschlossen.
4
Den so genannten Skineffekt, der dieses Phänomen beschreibt, werden wir bei den sinusförmig von der Zeit
anhängigen Feldern noch näher behandeln.
9
Unter zylindrisch soll hier der größeren Allgemeingültigkeit halber ein Zylinder mit
beliebiger Querschnittsform verstanden werden. Die Koordinate parallel zur
Zylinderachse bezeichnen wir als Längskoordinate der Leitung, der wir i. a. den
Formelbuchstaben z zuordnen. Die Querschnittsfläche AL der Leitung senkrecht zur
Längskoordinate z ist damit in Form und Größe unabhängig von z. Das Gleiche gilt
logischerweise für die zweigeteilte Randkurve RL der Querschnittsfläche, die aus den
beiden Teilkurven RiL zwischen Innenleiter und Dielektrikum einerseits und RaL
zwischen Außenleiter und Dielektrikum andererseits besteht.
Schließlich wollen wir uns auf geschirmte Zweidrahtleitungen beschränken., auf
Leitungen also, die zwei voneinander isolierte Leiter besitzen und zwar einen
Innenleiter, der von dem Dielektrikum der Leitung vollständig umgeben ist, und
einen Außenleiter, der wiederum das Dielektrikum vollständig umschließt und
dadurch den inneren Bereich der Leitung gegen die Außenwelt abschirmt (Bild 2.1).
Bild 2.1: Geschirmte Zweidrahtleitung
Bevor wir mit der mathematischen Behandlung der Felder auf der Leitung beginnen, wollen
wir noch einige Kennzeichnungen für bestimmte Kurventypen vereinbaren, die wir bei der
Integration als Integrationswege verwenden werden. Alle diese Kurven liegen innerhalb einer
Querschnittsfläche der Leitung d. h. vollständig im Dielektrikum:
Mit Cv bezeichnen wir Kurven, die den Innenleiter mit dem Außenleiter verbinden,
mit C0 bezeichnen wir Kurven, die einfach in sich geschlossen sind und den
Innenleiter nicht umschließen; C0 ist damit Randkurve einer ebenen, ganz innerhalb
des Leitungsdielektikums liegenden Fläche A0 und
mit C1 schließlich bezeichnen wir Kurven, die ebenfalls einfach in sich geschlossen
sind, den Innenleiter aber genau einmal umschließen; C1 ist Randkurve einer ebenen
Fläche A1, die auch die Querschnittsfläche des Innenleiters enthält.
Alle genannten Kurven seien regulär, d. h. anschaulich gesprochen genügend glatt und ohne
Schleifen und Kreuzungspunkte 5 . Der
r Umlaufsinn der Kurven C0 und C1 und damit die Richtung des Tangenteneinheitsvektors t auf diesen Kurven sei so gewählt, dass die Kurven beim
5
Mathematisch exakter formuliert sind reguläre Kurven stetig, bestehen aus endlich vielen stetig differenzierbaren Kurvenstücken, haben eine endliche Länge und sind doppelpunktfrei. (Siehe z. B. Definition 1 in [1], Seite
19.)
10
r
Blick in Richtung des Einheitsvektors e z rechtsherum durchlaufen werden. Der Normalenr
einheitsvektor n auf den Kurven C0 und C1 liege in der Querschnittsebene, stehe also senkr
recht auf e z , und zeige in das Äußere der ebenen Flächen A0 bzw. A1. Der Normaleneinheitsr
vektor auf den Flächen A0 und A1 ist identisch mit e z . Zwischen den beiden Einheitsvektoren
auf den in sich geschlossenen Kurven C0 und C1 besteht damit die Beziehung
r v r
n × t = ez .
(2.5)
Auf der Verbindungskurver Cv legen wir den Durchlaufsinn und damit die Richtung des
Tangenteneinheitsvektors t vom Innenleiter hin zum Außenleiter fest. Die Richtung des
r
Normaleneinheitsvektors n legen wir auf der Verbindungslinie Cv zwischen Innenleiter und
Außenleiter anders als in Gl. (2.5) durch
r r r
(2.6)
t × n = ez
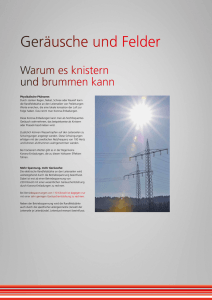
fest. In Bild 2.2 sind die oben definierten Kurven einschließlich der festgelegten Richtungen
für die Tangenten- und Normaleneinheitsvektoren dargestellt.
Bild 2.2: Integrationswege einschließlich der auf ihnen festgelegten Richtungen für die
Normalen- und Tangenteneinheitsvektoren.
Nach dieser Vorbereitung können wir die transversalen Felder auf der Leitung mathematisch
beschreiben. Wie oben bereits angekündigt, beginnen wir mit der Behandlung des
elektrischen Feldes.
11
2.1 Das elektrische Feld und der Kapazitätsbelag
Um das elektrische Feld auf einer Leitung zu untersuchen, gehen wir von dem Induktionsgesetz aus und wählen für die Integrationsfläche A in Gl. (1.4) eine ebene Fläche A0 mit einer
Randkurve C0, die definitionsgemäß innerhalb einer Querschnittsebene liegt, und berücksichtigen, dass der Normaleneinheitsvektor auf der Fläche A0 in z-Richtung zeigt und damit gleich
r
dem Einheitsvektor e z ist; für diesen Fall nimmt Gl. (1.4) die spezielle Form
r r
d
E
∫C ⋅ t d s = − d t
0
r r
B
∫ ⋅ ezd A .
(2.1.1)
A0
an. Da in das Integral auf der rechten Seite von Gl. (2.1.1) nur die z-Komponente der magnetischen Flussdichte eingeht, die wegen der vorausgesetzten Transversalität der Felder
identisch verschwindet, ist das Umlaufintegral über die Tangentialkomponente der elektrischen Feldstärke entlang einer beliebigen, den Innenleiter nicht umschließenden und in der
Querschnittsebene liegenden Kurve C0 gleich Null,
r r
E
(2.1.2)
∫ ⋅ t ds = 0 .
C0
In differentieller Schreibweise ausgedrückt, besagt dies, dass die transversale Rotation der
elektrischen Feldstärke in der Querschnittsebene identisch gleich Null ist,
r r
rot trv E = 0 .
(2.1.3)
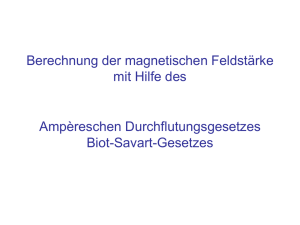
Bilden wir nun das Integral über die elektrische Feldstärke entlang zweier Kurven Cv und C′v ,
die beide den Innenleiter mit dem Außenleiter verbinden, dann können wir die beiden Verbindungswege zu einer geschlossenen Kurve C0 zusammenfassen, entlang der das Umlaufintegral
über die elektrische Feldstärke gleich Null ist (Bild 2.1.1) 1 . Damit sind die beiden Linienintegrale vom Innenleiter zum Außenleiter entlang der Kurven Cv und C′v , die bei dem
Umlaufintegral in entgegengesetzter Richtung durchlaufen werden, entgegengesetzt gleich;
werden beide, wie wir dies eingangs festgelegt haben, vom Innenleiter hin zum Außenleiter
durchlaufen, sind sie auch bezüglich ihres Vorzeichens einander gleich. Das Linienintegral
der elektrischen Feldstärke entlang der Verbindungskurve Cv, für das wir den Formelbuchstaben u wählen, ist damit unabhängig von dem in der Querschnittsfläche liegenden Integrationsweg Cv und kann deshalb als Spannung in der Querschnittsfläche definiert werden.
Da die elektrische Feldstärke von den Ortskoordinaten x, y und z sowie von der Zeit t abhängt, kann das Linienintegral nur noch von der Längskoordinate z und von der Zeit t
abhängen, denn die Querschnittskoordinaten x und y sind durch die Integration heraus gefallen. Für die in einer Querschnittsebene eindeutig definierte Spannung gilt also
r
r
u = u ( z , t ) = ∫ E ( x, y , z , t ) ⋅ t d s .
(2.1.4)
Cv
Es sei jedoch noch einmal betont, dass wir uns bei der Integration auf Wege beschränken
müssen, die innerhalb einer Querschnittsebene liegen, weil andernfalls der in sich
geschlossene Integrationsweg über Cv und C′v ein Magnetfeld umschließt, was wir aus1
Fallen die Endpunkte der beiden Integrationswege Cv und C′v nicht zusammen, sind zum vollständigen
Schließen der Integrationskurve noch Kurvenstücke entlang der beiden Leiteroberflächen hinzuzufügen, die
wegen der verschwindenden Tangentialkomponente der elektrischen Feldstärke auf der Leiteroberfläche jedoch
keinen Beitrag zum Umlaufintegral liefern. Bei sich kreuzenden Kurven Cv und C′v entstehen mehrere
geschlossene Kurven vom Typ C0; auf jede dieser Teilkurven können wir jedoch unverändert die gleiche
Argumentation wie oben anwenden.
12
schließen müssen. Dadurch ist der Spannungsbegriff gegenüber dem in der Elektrostatik stark
eingeschränkt.
Bild 2.1.1: Zur Definition der Spannung.
Die Forderung, dass der Integrationsweg ganz in der Querschnittsfläche liegen muss, gilt
natürlich auch für den Anfangs- und Endpunkt des Integrationsweges. Weil der Wert des
Linienintegrals z. B. zwischen den in Bild 2.1.2 eingezeichneten Punkten 1 und 1′′ und
zwischen den Klemmen 1 und 2 nicht eindeutig bestimmt ist, da er abhängig vom gewählten
Integrationsweg ist, kann eine Spannung zwischen diesen Punkten nicht definiert werden.
Ferner hängt die Spannung von der Längskoordinate z und damit von der gewählten Querschnittsebene ab; bei der Angabe einer Spannung ist daher immer auch die Ebene zu benennen, auf die sich die Spannungsangabe bezieht. Man spricht deshalb von der Spannungsbezugsebene.
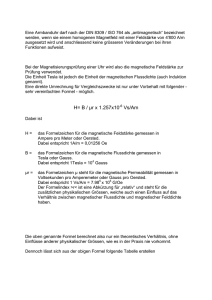
Bild 2.1.2: a) Vierpol mit koaxialen Anschlussleitungen
b) Schematisiert dargestellter Vierpol
Zur Beschreibung von Vierpolen bzw. Zweitoren verwendet man in der Vierpoltheorie nur
zwei Spannungen, obwohl zwischen vier Anschlußklemmen drei unabhängige Spannungen
existieren können. In der niederfrequenten Elektrotechnik sind nur zwei Spannungen
erforderlich, weil man sich auf Schaltungen beschränkt, bei denen die sich einstellenden
Ströme unabhängig von der Längsspannung, d. h. von der Spannung zwischen den Toren 1
und 2 sind, was man u. U. durch das Zwischenschalten eines Übertragers erzwingen muss. In
13
anderen Fällen liegt eine Eingangsklemme und eine Ausgangsklemme auf dem gleichen
Potential, so dass es sich hier in Wirklichkeit um einen Dreipol handelt, bei dem sich die
Längsspannung bereits aus den zwei Klemmenspannungen ergibt. Im Gegensatz dazu ist bei
Vierpolen in der Hochfrequenztechnik eine Längsspannung überhaupt nicht definierbar;
deshalb verwendet man hier statt des Begriffes Vierpol den Terminus Zweitor.
Wir betrachten nun ein zylinderförmiges Gebiet innerhalb der Leitung, das überstrichen wird,
wenn man gedanklich eine Fläche A0 von der Ebene z = const. bis zur Ebene z + Δz = const.
parallel zur z-Achse verschiebt. Über die Hüllfläche Hr0 dieses Zylinders integrieren wir die
Normalenkomponente der elektrischen Flussdichte D und erhalten auf diese Weise die
elektrische Ladung im Inneren dieses Gebietes, die jedoch wegen der fehlenden elektrischen
Raumladungsdichte 2 im Dielektrikum gleich Null ist. Berücksichtigen wir ferner Gl. (2.1),
erhalten wir wegen des als homogen vorausgesetzten Dielektrikums, also eines Dielektrikums
mit konstanter Permittivität ε ,
r r
r r
∫D⋅ nd A = ε ∫ E ⋅ nd A = 0.
H0
(2.1.5)
H0
Die Hüllfläche H0 setzt sich aus der Mantelfläche M0, die beim Parallelverschieben der
Randkurve C0 überstrichen wird, und aus den Stirnflächen A0 in den beiden Ebenen z = const.
und z + Δz = const. zusammen. Auf den beiden Stirnflächen zeigt der Normaleneinheitsvektor
in + z- bzw. in − z-Richtung, so dass diese beiden Teilbereiche der Hüllfläche H0 wegen der
Transversalität der Felder keinen Beitrag zum Hüllenintegral liefern.
Bild 2.1.3: Zylinderförmiger Raumbereich mit der Hüllfläche H0, die sich aus der
Mantelfläche M0 und den beiden Stirnflächen A0 in den Ebenen z = const. und
z + Δz = const. zusammensetzt.
Von dem Hüllenintegral in Gl. (2.1.5) bleibt damit nur das Integral über die Mantelfläche M0
des zylinderförmigen Gebietes übrig. Da die Permittivität ε verschieden von Null ist, können
wir durch ε dividieren, so dass für die elektrische Feldstärke
z + Δz r
r
r
r
∫ E ( x ′, y ′, z ′ , t ) ⋅ n d A = ∫ ∫ E ( x ′, y ′, z ′, t ) ⋅ n d s d z ′ = 0
M0
2
z C0
Das Verschwinden der elektrischen Raumladungsdichte im Dielektrikum, in dem die elektrische Stromdichte
gleich Null ist, folgt aus Gl. (1.5), wenn man gleichzeitig annimmt, dass es einen früheren Zeitpunkt gibt, zu
dem sie bereits gleich Null war.
14
gilt; dabei ist s die Wegkoordinate entlang der Kurve C0. Weil das Integral für beliebige
Werte von z und Δz verschwindet, muss der Integrand – d. i. hier das Umlaufintegral über die
in sich geschlossene Kurve C0 – verschwinden, wodurch sich unsere Gleichung auf
r
r
E
∫ ( x ′, y ′ , z , t ) ⋅ n d s = 0
(2.1.6)
C0
mit beliebigem C0 reduziert. In differentieller Schreibweise ausgedrückt bedeutet dies, dass
die transversale Divergenz der elektrischen Feldstärke gleich Null ist,
r
div trv E( x , y , z , t ) = 0 .
(2.1.7)
Mit der auf der Oberfläche der Leiter, d. h. auf der Grenzfläche zwischen Dielektrikum und
Leiter geltenden Randbedingung Gl. (2.3) gilt auf der Randkurve RL des Leitungsquerschnitts
r
r
r r
Etan = 0 bzw. E ⋅ t = 0 .
(2.1.8)
Diese zusätzliche Forderung legt das elektrische Feld in der Querschnittsebene bei gegebener
Spannung eindeutig fest. Um dies zu zeigen, definieren wir die Funktion
r
r
t E = E( x , y , z , t ) u( z , t ) .
(2.1.9)
Dividieren wir nun die Ausdrücke auf beiden Seiten der Gl. (2.1.2) bis (2.1.4) sowie von
Gl. (2.1.6) bis (2.1.8) durch die Spannung u(z, t), erhalten wir die in der Querschnittsfläche AL
geltenden Gleichungen
r r
∫ tE ⋅ t d s = 0 ,
(2.1.10)
r
v
rot trv t E = 0 ,
(2.1.11)
r r
∫ tE ⋅ n d s = 0 ,
(2.1.12)
v
div trv tE = 0
(2.1.13)
C0
bzw.
und
C0
bzw.
sowie die Normierungsbedingung
r r
∫ tE ⋅ t d s = 1
(2.1.14)
Cv
und die auf der Randkurve RL des Leitungsquerschnitts geltende Bedingung
r
r r
r
t E , tan = 0 bzw. t E ⋅ t = 0 .
(2.1.15)
r
Diesen Gleichungen entnehmen wir zunächst, dass die Funktion t E , weil sie ausschließlich
durch diese Gleichungen eindeutig bestimmt ist, nur von den Querschnittskoordinaten x und y
abhängen kann, denn weder die Längskoordinate z noch die Zeit t kommen in diesen Gleichungen explizit vor und auch die Randkurve RL der Querschnittsfläche hängt wegen der vorausgesetzten Zylinderform der Leiter nicht von diesen Variablen ab, so dass auch sie nicht
r
versteckt über die Randbedingungen Einfluss auf t E nehmen kann. Folglich gilt
15
r
r
tE = tE ( x , y ) .
(2.1.16)
r
Die spezielle Lösung für t E wird allein durch die Randkurve RL , d. h. durch die Größe und
Gestalt der Querschnittsfläche bestimmt, denn auch die Materialkonstanten ε und μ sind nicht
in den obigen Gleichungen enthalten. Die allgemeine Darstellung der elektrischen Feldstärke
erhält damit die Form
r
r
E ( x, y , z , t ) = u ( z , t ) ⋅ t E ( x, y ) .
(2.1.17)
Es sei betont, dass es sich bei dieser Darstellung nicht um einen willkürlichen Produktansatz
handelt, vielmehr folgt sie zwingend aus der vorausgesetzten Transversalität der Felder. Der
r
vektorielle Faktor t E hat die physikalische Dimension 1/Länge, was man leicht sowohl der
Definitionsgleichung (2.1.9), als auch der Normierungsbedingung Gl. (2.1.14) entnehmen
kann.
Bevor wir auf Schlussfolgerungen aus dieser Darstellung eingehen, führen wir den Eindeutigr
r (1)
r ( 2)
keitsbeweis für t E . Dazu nehmen wir zunächst an, dass es zwei Funktionen t E und t E
gibt, die beide den oben zusammengestellten Gleichungen genügen. Wir zeigen nun, dass
deren Differenz
r
r2 r1
t EΔ = t E( ) − t E( )
r (1)
r ( 2)
gleich Null ist, die beiden Funktionen t E und t E somit identisch sind, sich also nicht
voneinander unterscheiden. Den Beweis führen wir, indem wir nachweisen, dass das Integral
r
des Betragsquadrates von t EΔ über den Leitungsquerschnitt AL
r Δ∗ r Δ
∫ tE ⋅ tE d A
AL
gleich Null ist. Der hochgestellte Stern bedeutet dabei das Konjugiertkomplexe der komplexr
r (1)
r ( 2)
wertig zugelassenen Funktion t EΔ . Wir setzen dazu die beiden Funktionen t E und t E in
die Gleichungen (2.1.10) bis (2.1.15) ein und bilden die jeweiligen Differenzen. Dadurch
r
erhalten wir die entsprechenden Integrale für die Differenzfunktion tEΔ ; für sie gilt
rΔ r
∫ tE ⋅ t d s = 0 ,
(2.1.18)
r
r
rot trv t EΔ = 0 ,
(2.1.19)
rΔ r
∫ tE ⋅ n d s = 0 ,
(2.1.20)
r
div trv t EΔ = 0
(2.1.21)
C0
bzw.
und
C0
bzw.
r (1)
r ( 2)
und, da die Funktionen t E und t E in gleicher Weise durch Gl. (2.1.14) normiert sind,
erhalten wir aus der Normierungsbedingung die Forderung
16
rΔ r
∫ tE ⋅ t d s = 0 .
(2.1.22)
Cv
Schließlich gilt auf der Randkurve RL der Querschnittsfläche die Randbedingung
r r
t EΔ ⋅ t = 0 .
(2.1.23)
r
r
Die Gleichungen für t E und t EΔ unterscheiden sich damit nur in der Normierungsbedingung
r
voneinander. Wir bilden nun das Integral des Betragsquadrats der Vektorfunktion t EΔ über
die Querschnittsfläche AL:
r Δ∗ r Δ
r Δ∗ r Δ
∫ tE ⋅ tE d A = ∫ tE ⋅ tE d A .
AL
(2.1.24
A ′L
Mit A´L auf der rechten Seite der Gleichung bezeichnen wir die entlang einer beliebigen
regulären Verbindungskurve Cv aufgeschnittene Querschnittsfläche AL (siehe Bild 2.1.4). Die
Größe der Integrationsfläche und damit der Wert des Flächenintegrals wird durch diese
Maßnahme nicht beeinflusst; die Gestalt der Querschnittsfläche wird durch das Aufschneiden
jedoch so verändert, dass sie im mathematischen Sinne einfach zusammenhängend wird, was
für die Anwendbarkeit des Gaußschen Satzes erforderlich ist.
Bild 2.1.4: Die Integrationsfläche A′L mit der Randkurve R ′L
r
Wegen der Wirbelfreiheit von tEΔ gemäß Gl. (2.1.18) bzw. (2.1.19) existiert eine Potentialfunktion Φ ΔE mit der Eigenschaft
r
t EΔ = − grad trv Φ ΔE .
(2.1.25)
Wir setzen dies für den zweiten Faktor des Integranden in Gl. (2.1.24) ein und erhalten
r Δ∗ r Δ
r Δ∗
Δ
∫ t E ⋅ t E d A = − ∫ t E ⋅ grad trv Φ E d A .
AL
A ′L
Dieser Ausdruck lässt sich mit Hilfe einer mit der partiellen Integration von skalaren Funktionen vergleichbaren Operation für Vektorfunktionen umformen in
r Δ∗ r Δ
r
r Δ∗
Δ Δ∗
Δ
∫ t E ⋅ t E d A = − ∫ div trv (Φ E t E )d A + ∫ Φ E div trv t E d A .
AL
A ′L
A ′L
17
Das zweite Integral auf der rechten Seite dieser Gleichung ist wegen der transversalen
Quellenfreiheit von ݐԦாΔ nach Gl. (2.1.21) gleich Null. Wir formen nun das erste der beiden
rechts stehenden Integrale mit Hilfe des Gaußschen Satzes um und erhalten
r Δ∗ r Δ
Δ r Δ∗ r
∫ t E ⋅ t E d A = − ∫ ΦΕ t E ⋅ n d s .
AL
(2.1.26)
R ′L
Das Umlaufintegral auf der rechten Seite dieser Gleichung erstreckt sich über den Rand RL´
der aufgeschnittenen Querschnittsfläche AL´. Der Rand dieser Fläche setzt sich aus den Teilberandungen RiL entlang des Innenleiters und RaL entlang des Außenleiters zusammen sowie
aus den beiden Kurven Cv und C’v , die durch das Aufschneiden der Querschnittsfläche
entstanden sind. Auf den beiden Randkurven RiL und RaL ist das Potential Φ ΔE wegen
Gl. (2.1.23) und Gl. (2.1.22) konstant, nimmt also in beiden Teilintegralen den gleichen
konstanten Wert
Δ
Φ EiΔ = Φ Ea
= Φ EΔ
an. Deshalb können wir Φ ΔE auf diesen Integrationsabschnitten jeweils vor das Integralzeichen ziehen. Die Teilintegrale über den Innenleiter und über den Außenleiter sind dann mit
Gl. (2.1.21) bis auf das Vorzeichen einander gleich und heben sich daher gegenseitig heraus.
Ferner folgt aus den Gl. (2.1.18) und (2.1.23), dass auch das Umlaufintegral über eine
beliebige Kurve C1, die den Innenleiter einmal umschließt, verschwindet,
rΔ r
∫ tE ⋅ t d s = 0 .
C1
Daraus folgt, dass das Potential Φ ΔE auf beiden Seiten der Schnittlinie, d. h. auf den beiden
Integrationsabschnitten Cv und C’v den gleichen Wert annimmt Dadurch können wir die
Integration über die beiden Abschnitte Cv und C’v zu einem Integral zusammenfassen. Das so
gebildete Integral wird zu Null, da die Normaleneinheitsvektoren auf den beiden (räumlich
zusammenfallenden) Kurven Cv und C’v in entgegengesetzte Richtung zeigen, so dass die
Werte des Integranden auf Cv und C’v sich herausheben. Damit wird das gesamte Umlaufintegral über RL´ zu Null und wir erhalten für das gesuchte Flächenintegral
r Δ∗ r Δ
∫ tE ⋅ tE d A = 0 .
(2.1.27)
AL
Da der Integrand als Betragsquadrat reell ist und nicht negativ werden kann, gilt schließlich in
der gesamten Querschnittsfläche
r
r
t EΔ ≡ 0 .
(2.1.28)
r (1)
r ( 2)
Die Funktionen t E und t E unterscheiden sich also nicht voneinander, womit die Einr
deutigkeit der Lösung für die Vektorfunktion t E nachgewiesen ist.
r
r
Aus der Eindeutigkeit von t E lässt sich ferner schließen, dass t E reell ist, denn wenn wir von
einer komplexen Funktion
r
r
r
t E = t Er + j t Ei
r
r
mit der reellen Realteilfunktion t Er und der reellen Imaginärteilfunktion t Ei ausgehen, können
wir in den Gl. (2.1.10) bis (2.1.15) auf beiden Seiten den Imaginärteil bilden und erhalten für
18
r
t Ei die gleichen Bedingungen wie man sie mit Gl. (2.1.18) bis (2.1.23) für die Vektorfunktion
r
tEΔ erhält; von dieser Funktion haben wir bereits gezeigt, dass sie identisch verschwindet.
r
r
Somit ist auch der Imaginärteil von t E identisch gleich Null; t E ist also reell. Wir bezeichnen
r
die reelle Vektorfunktion t E ( x , y ) in Anlehnung an BRAND [2] als transversale
Strukturfunktion des elektrischen Feldes; sie bestimmt nach Gl. (2.1.17) das Feldlinienbild und damit die Struktur des elektrischen Feldes.
r
Da t E ( x , y ) nicht von der Längskoordinate z abhängt, ist die Struktur des elektrischen Feldes
in jeder Querschnittsebene die Gleiche; da sie ferner auch nicht von der Zeit t abhängt, ist sie
zu jedem Zeitpunkt und für jede Zeitabhängigkeit gleich. Ein hochfrequentes Feld hat damit
die gleiche Struktur wie das Feld einer statisch aufgeladenen Leitung. Wir werden uns
deshalb im Folgenden nicht weiter mit der Bestimmung der transversalen Strukturfunktion
befassen 3 . Schließlich ist der zeitliche Verlauf des Feldes in jedem Punkt eines Querschnitts
derselbe; zeitlich sinusförmige Felder haben mithin in jedem Punkt eines Querschnitts die
gleiche Phase.
Wird zum Abgriff einer der Spannung proportionalen Größe eine Sonde am Umfang eines
Querschnitts angebracht, ist es im Prinzip gleichgültig, an welcher Stelle des Umfangs die
Sonde angebracht wird (Bild 2.1.5). Auch die Richtung des elektrischen Feldes, die durch die
r
Strukturfunktion t E ( x , y ) festgelegt ist, ändert sich nicht mit der Zeit (lediglich das
Vorzeichen wird noch durch den Faktor u(z, t) beeinflusst); das Feld ist damit im ganzen
Querschnitt linear polarisiert.
Bild 2.1.5: Beispiel einer elektrischen Sonde zur Messung der Spannung 4 auf einer Leitung.
Als nächstes stellen wir einen Zusammenhang her zwischen der Spannung, die zwischen dem
Innen- und dem Außenleiter liegt, und der Ladung, die auf dem Innenleiter gespeichert ist.
Zur Berechnung der elektrischen Ladung auf dem Innenleiter gehen wir von einem Zylinder
aus, der überstrichen wird, wenn man eine beliebige Fläche A1 mit der Randkurve C1 parallel
3
Die Berechnung der transversalen Strukturfunktion für das elektrische Feld ist mit Hilfe der Gleichungen
(2.1.10) bis (2.1.15) möglich.
4
Die kurzgeschlossene Sonde führt bei zeitlich sinusförmigen Vorgängen den Strom îS = jωDAS; die Spannung
an der leerlaufenden Sonde ist dann mit E = û⋅tE näherungsweise ûS = îS/jωCS = EεAS/CS = tE(εAS/CS )û und
damit proportional zur Spannung auf der Leitung. Dabei ist CS die Kapazität der Sonde und AS die wirksame
(effektive) Sondenfläche.
19
zur z-Achse verschiebt. Über die Hüllfläche
r dieses Zylinders integrieren wir die Normalenkomponente der elektrischen Flussdichte D und erhalten so die Ladung im Inneren dieses
Gebietes; sie kann sich nur auf dem Innenleiter im Abschnitt zwischen den Ebenen z = const.
und z + Δ z = const. befinden, denn das Dielektrikum ist voraussetzungsgemäß raumladungsfrei. Die beiden Stirnflächen des Zylinders liefern keinen Beitrag zum Hüllenintegral,
so dass nur die Integration über die Mantelfläche M1 des Zylinders übrig 5 bleibt. Die Ladung
auf dem Innenleiter wird also durch das Integral
z + Δz r r
r r
Q zK z + Δz = ∫ D ⋅ n d A = ε ∫ ∫ E ⋅ n d s d z ′
M1
z C1
ausgedrückt. Für die elektrische Feldstärke setzen wir die Produktdarstellung Gl. (2.1.17) ein
und separieren dann die beiden Integrale. Da der Verlauf der Spannung u(z, t) entlang der
Leitung bei dem derzeitigen Kenntnisstand jedoch noch nicht bekannt ist, lässt sich die
Integration über z in dieser Phase der Rechnung noch nicht ausführen. Wir wenden deshalb
den Mittelwertsatz der Integralrechnung an und berücksichtigen, dass bei einer stetigen Funktion der Mittelwert an mindestens einer Stelle des Integrationsbereichs wirklich angenommen
wird. Auf diese Weise erhalten wir
r r
Q zKz + Δz = ε ⋅ Δz ⋅ u ( z + ξΔz , t ) ⋅ ∫ t E ⋅ n d s ,
(2.1.29)
C1
wobei der Wert von ξ nicht bekannt ist; es genügt aber zu wissen, dass er zwischen den
Werten von Null und Eins liegt, 0 ≤ ξ ≤ 1.
Der Wert des Umlaufintegrals in Gl. (2.1.29) ist mit Gl. (2.1.12) unabhängig von der
r
gewählten Integrationskurve C1 und hängt mit t E nur von der Größe und Gestalt des
Leitungsquerschnitts ab; wir bezeichnen ihn im folgenden als Geometriefaktor gC des
elektrischen Feldes,
r r
gC = ∫ t E ⋅ n d s ;
(2.1.30)
C1
er hat die physikalische Dimension Eins.
Dividieren wir nun die beiden Seiten von Gl. (2.1.29) durch Δz und lassen anschließend Δz
gegen Null gehen, erhalten wir als Grenzwert die auf die Länge der Leitung bezogene Ladung
Q ′( z, t ) = ε ⋅ g C ⋅ u ( z, t ) ;
(2.1.31)
Q ′ bezeichnet man als Ladungsbelag.
Dieser Darstellung können wir entnehmen, dass der Ladungsbelag nur mit der Spannung in
der gleichen Querschnittsebene verknüpft ist, in der auch der betrachtete Ladungsbelag liegt
und dass umgekehrt die Spannung und damit die elektrische Feldstärke nur vom Ladungsbelag in der gleichen Querschnittsebene abhängt, was bei der Ableitung der Leitungsgleichungen häufig als selbstverständlich vorausgesetzt wird. Wenn man jedoch das Lösungsintegral
für die Poissonsche Gleichung kennt, könnte man daraus die Schlussfolgerung ziehen, dass
die elektrische Feldstärke von der Ladungsverteilung auf der gesamten Leitung abhängt. Aufgrund der vorausgesetzten Transversalität des elektromagnetischen Feldes ist dies aber; wie
wir zeigen konnten, nicht der Fall.
5
Im Gegensatz zu dem mit A0 gebildeten Zylinder enthalten die beiden Stirnflächen hier jeweils auch den
Querschnitt des Innenleiters, in dem die elektrische Flussdichte jedoch wegen der vorausgesetzten unendlichen
Leitfähigkeit des Leitermaterials verschwindet, so dass auch die Integrale über diese beiden Flächen nicht zur
elektrischen Ladung beitragen.
20
Den Proportionalitätsfaktor zwischen der Spannung und dem Ladungsbelag bezeichnet man
als Kapazitätsbelag C′ der Leitung; er ist durch die Permittivität ε des Dielektrikums und
durch den Geometriefaktor gC festgelegt,
C′ = ε ⋅ gC ;
(2.1.32)
mit ihm gilt
Q ′( z , t ) = C ′u( z , t ) .
(2.1.33)
Der Kapazitätsbelag hat die gleiche physikalische Dimension wie die Permittivität; bei der
leeren (luftgefüllten) Leitung hat er die Größe
C0′ = ε 0 ⋅ gC .
(2.1.34)
Den Kapazitätsbelag einer mit einem Dielektrikum gefüllten Leitung erhält man daraus einfach durch Multiplikation mit der relativen Permittivität ε r ,
C ′ = ε r ⋅ C0′ .
(2.1.35)
Eine Vorstellung von der Größenordnung des Kapazitätsbelages einer Leitung liefert die elektrische Feldkonstante ε0; sie hat den Wert
ε 0 = 8,854 pF/ m .
(2.1.36)
Der Geometriefaktor liegt bei für technische Anwendungen normal dimensionierten Koaxialleitungen etwa zwischen den Werten drei und zehn.
21
Aufgabe 2.1: Gegeben sei eine Koaxialleitung, deren Innenleiter den Durchmessers d und
deren Außenleiter den Innendurchmesser D besitzt; das Dielektrikum zwischen Innen- und
Außenleiter habe die Permitivität ε = ε0εr .
Ermitteln Sie allgemein, d. h. abhängig von den Durchmessern d und D sowie von der
Permittivität ε
r
r
2.1.1 die transversale Strukturfunktion tE ( x , y ) bzw. t E ( ρ ,ϕ ) , wobei ρ und ϕ
die Polarkoordinaten sind,
2.1.2 den Geometriefaktor gC und
2.1.3 den Kapazitätsbelag C0′ der leeren (luftgefüllten) Leitung.
2.1.4 Berechnen Sie die Größe von gC und C0′ für die Durchmesserverhältnisse
D/d = 2; 2,78; 3; 3,79 und 4.
Hinweis: Berücksichtigen Sie die Rotationssymmetrie des Leitungsquerschnitts.
Lösung zu Aufgabe 2.1:
2.1.1 Mit den durch x = ρ ⋅ cos ϕ und y = ρ ⋅ sin ϕ definierten Polarkoordinaten
ρ und ϕ ist
r
t E ( ρ,ϕ ) =
1
1 r
⋅ ⋅ eρ ,
ln( D d ) ρ
2.1.2 gC = 2π ln( D d ) ,
2.1.3 C0′ =
(2.1.37a)
1
⋅ 55,6 pF m .
ln( D d )
(2.1.37b)
2.1.4
D/d =
2
2,78
3
3,59
4
gC =
9,06
6,28
5,72
4,92
4,53
C0′ =
80,2 pF/m
55,6 pF/m
50,6 pF/m
43,5 pF/m
40,1 pF/m
22
2.2 Das magnetische Feld und der Induktivitätsbelag
Zur Berechnung des magnetischen Feldes auf der Leitung gehen wir von der ersten Maxwellschen Gleichung in Integralform aus, d. h. von dem in Gl. (1.3) wiedergegebenen Durchflutungsgesetz. Als Integrationsbereich für die Flächenintegrale auf der rechten Seite der
Gleichung wählen wir zunächst eine ebene Fläche A0 mit einer Randkurve C0, wie wir sie am
Anfang von Kapitel 2 definiert haben. Da einerseits das Dielektrikum keinen elektrischen
r
Strom führt, die elektrische
Stromdichte
S
dort also verschwindet und andererseits die elekr
trische Flussdichte D voraussetzungsgemäß rein transversal ist, sind beide Flächenintegrale
gleich Null und wir erhalten
r r
H
∫ ⋅t d s = 0,
(2.2.1)
C0
r
denn der Normaleneinheitsvektor n ist auf der gesamten ebenen Fläche A0 gleich dem
r
Einheitsvektor e z . Da Gl. (2.2.1) für beliebige Kurven C0 erfüllt wird, ist die transversale
Rotation in der Querschnittsfläche AL identisch gleich Null,
r r
rot trv H = 0 .
(2.2.2)
Ferner wählen wir für das Hüllenintegral in Gl. (1.7) als Integrationsgebiet die Hüllfläche H0
eines zylinderförmigen Gebietes mit einer Grundfläche A0 und der Höhe Δz. Die Achse des
Zylinders verlaufe parallel zur Längskoordinate z. Wegen der Transversalität des magnetischen Feldes verschwindet der Beitrag des Integrals über die beiden Stirnflächen des
Zylinders. Für das Integral über die Mantelfläche wählen wir die gleichen Koordinaten, wie
wir sie beim elektrischen Feld zur Ableitung von Gl. (2.1.12) verwendet haben und gewinnen,
r
r
indem wir die in einem KLZIH-Medium 1 geltende Proportionalität von B und H
berücksichtigen, für die magnetische Feldstärke die Beziehung
r r
H
∫ ⋅n d s = 0,
(2.2.3)
C0
was, in differentieller Form geschrieben,
r
div trv H = 0
(2.2.4)
bedeutet. Bei einem quellenfreien, rein transversalen Feld ist folglich auch die transversale
Divergenz gleich Null.
Auf der Randkurve RL der Querschnittsfläche AL der Leitung ist die Normalenkomponente der
magnetischen Flussdichte und damit auch die der magnetischen Feldstärke gleich Null, da das
magnetische Feld nicht in den als ideal angenommenen Leiter eindringen kann. Es gilt damit
r
r
r r
H N = 0 bzw. H ⋅ n = 0 auf RL.
(2.2.5)
Schließlich ist das Umlaufintegral der magnetischen Feldstärke über eine Kurve C1, die nach
der von uns getroffenen Definition den Innenleiter einmal umschließt, gleich dem durch den
Innenleiter fließenden Strom i, der nur noch von der Zeit t und von der gewählten Längskoordinate der Querschnittsfläche (z = const.) abhängen kann,
r
r
i = i ( z , t ) = ∫ H ( x ′, y ′, z , t ) ⋅ t d s .
(2.2.6)
C1
1
Siehe Abschnitt 2
23
r
Diese Gleichungen bestimmen die magnetische Feldstärke H eindeutig. Um dies zu zeigen,
dividieren wir zunächst die magnetische Feldstärke durch den Strom i(z, t) und erhalten so die
Vektorfunktion
r
r
t H = H ( x, y, z , t ) i( z , t ) .
(2.2.7)
Indem wir nun auch die Gleichungen (2.2.1) bis (2.2.5) auf beiden Seiten durch den Strom i
dividieren, erhalten wir die in der Querschnittsfläche AL der Leitung geltenden Gleichungen
r r
∫ tH ⋅ t d s = 0 ,
(2.2.8)
r
r
rot trv t H = 0 ,
(2.2.9)
r r
∫ tH ⋅ n d s = 0
(2.2.10)
r
div trv t H = 0 ,
(2.2.11)
C0
bzw.
und
C0
bzw.
sowie die auf der Randkurve RL der Querschnittsfläche geltende Bedingung
r r
tH ⋅ n = 0
(2.2.12)
r
und die Normierungsbedingung für t H
r r
∫ t H ⋅ t d s = 1.
(2.2.13)
C1
r
Wie beim elektrischen Feld kann auch hier die Vektorfunktion t H nur von den Querschnittskoordinaten x und y abhängen und nicht von der Längskoordinate z und der Zeit t, denn diese
Variablen kommen weder explizit in den Gleichungen (2.2.8) bis (2.2.13) vor, noch nehmen
sie indirekt über die Randbedingung Einfluss auf die Lösung, denn die Randkurve RL des
Leitungsquerschnitts ist ebenfalls unabhängig von z. Es gilt also
r
r
tH = tH ( x, y) .
Damit haben wir für die magnetische Feldstärke die Produktdarstellung
r
r
H (x, y, z, t ) = i( z, t ) t H ( x, y )
(2.2.14)
(2.2.15)
r
gefunden. Es sei auch an dieser Stelle betont, dass es sich bei der Darstellung von H in der
Form von Gl. (2.2.15) nicht um einen willkürlichen Produktansatz handelt, vielmehr folgt sie
zwingend aus der vorausgesetzten Transversalität des elektrischen und magnetischen Feldes.
r
Die ausschließlich von den Querschnittskoordinaten x und y abhängige Vektorfunktion t H
bezeichnen wir wie BRAND [2] als transversale Strukturfunktion des magnetischen
Feldes, weil sie die Struktur des magnetischen Feldes und damit die Gestalt der magnetischen Feldlinien bestimmt.
24
r
Wir wenden uns nun dem Eindeutigkeitsbeweis für die Strukturfunktion t H zu und nehmen
r (1)
r ( 2)
zu diesem Zweck zunächst an, dass es zwei Funktionen t H und t H gibt, die den Gleichungen (2.2.8) bis (2.2.13) genügen. Die Differenz der beiden Lösungen
r
r2 r1
t HΔ = t H( ) − t H( )
(2.2.16)
gehorchen dann in der Querschnittsfläche AL den Gleichungen
rΔ r
∫ tH ⋅ t d s = 0
(2.2.17)
r
r
rot trv t HΔ = 0 ,
(2.2.18)
rΔ r
∫ tH ⋅ n d s = 0
(2.2.19)
r
div trv t HΔ = 0
(2.2.20)
C0
bzw.
und
C0
bzw.
sowie auf der Randkurve RL des Querschnitts der Bedingung
r r
t HΔ ⋅ n = 0
(2.2.21)
und der aus der Normierungsbedingung folgenden Forderung
rΔ r
∫ tH ⋅ t d s = 0 .
(2.2.22)
C1
r
Wir zeigen nun, dass die Differenzfunktion t HΔ unter diesen Bedingungen identisch ver-
r
schwindet und damit, dass die transversale Stukturfunktion t H ( x , y ) eindeutig ist. Die Herleitung des Beweises verläuft in ähnlicher Weise wie bei dem Eindeutigkeitsbeweis für das
elektrische Feld; wegen der unterschiedlichen Randbedingungen ergeben sich jedoch kleine
Unterschiede in der Beweisführung.
r
Wie beim elektrischen Feld bilden wir das Betragsquadrat von t HΔ , integrieren es über die
Querschnittsfläche AL und zeigen dass dieses Integral gleich Null ist. Da der Integrand reell ist
und nicht negativ sein kann, verschwindet dann auch der Integrand in der gesamten Querr
schnittsfläche AL und mit ihm die Vektorfunktion t HΔ .
Aus Gl. (2.2.8) bzw. (2.2.9) folgt, dass es eine skalare Funktion Φ HΔ mit der Eigenschaft
r
t HΔ = − grad trv ΦΗΔ
(2.2.23)
r
gibt. Wir ersetzen die Vektorfunktion t HΔ bei dem zweiten Faktor des Betragsquadrates durch
den Gradienten und erhalten für das zu berechnende Integral
r r
r
0 ≤ ∫ t HΔ∗ ⋅ t HΔ d A = − ∫ t HΔ∗ ⋅ grad trv Δ d A .
(2.2.24)
AL
AL
25
Mit Hilfe einer der partiellen Integration skalarer Funktionen verwandten Umformung wird
daraus
r
r
r
r
0 ≤ ∫ t HΔ∗ ⋅ t HΔ d A = − ∫ div trv Φ ΔH t HΔ∗ d A + ∫ Φ ΔH div trv t HΔ∗ d A .
(2.2.25)
(
AL
)
AL
AL
Das zweite Integral in Gl. (2.2.25) verschwindet wegen der durch Gl. (2.2.20) gegebenen
r
transversalen Quellenfreiheit von t HΔ . Das erste der beiden Integrale formen wir mit Hilfe des
Gaußschen Satzes in ein Umlaufintegral über die Randkurve um, müssen aber zuvor, um den
Gaußschen Satz anwenden zu können, das Integrationsgebiet entlang einer Verbindungskurve
Cv aufschneiden, damit aus der Querschnittsfläche A L ein einfach zusammenhängendes
Gebiet A ′L entsteht; dessen Randkurve bezeichnen wir mit RL’. Auf diese Weise erhalten wir
r Δ∗ r Δ
r Δ∗
r Δ∗
Δ
Δ
∫ t H ⋅ t H d A = − ∫ div trv (Φ H t H )d A = − ∫ div trv (Φ H t H )d A
AL
AL
r
r
= ∫ Φ ΔH t HΔ∗ ⋅ n d s .
A ′L
(2.2.26)
R ′L
Die Randkurve RL’ des aufgeschnittenen Gebietes setzt sich aus den beiden Abschnitten RiL
und RaL entlang der Oberflächen des Innenleiters und des Außenleiters zusammen – auf ihnen
r r
ist das Skalarprodukt t HΔ ⋅ n nach Gl. (2.2.21) gleich Null, so dass die Integrale über diese
Abschnitte nicht zum Umlaufintegral beitragen – und aus den Verbindungskurven zwischen
Innenleiter und Außenleiter entlang der Kurven Cv und C’v (siehe Abb. 2.1.4). Rechts und
links der Schnittkurve ist wegen Gl. (2.2.22) das Potential gleich. Ferner zeigen die
Normaleneinheitsvektoren auf den Abschnitten Cv und C’v in entgegengestzte Richtung, so
dass die Integranden auf diesen Abschnitten, die ja geometrisch zusammenfallen, entgegengesetzte Vorzeichen haben und sich dadurch gegenseitig aufheben. Damit verschwindet das
r
r
gesamte Umlaufintegral und mit ihm der Integrand t HΔ ∗ ⋅ t HΔ , der ja nicht negativ sein kann.
Es gilt also
r
r
t HΔ ≡ 0
(2.2.27)
r
in der gesamten Querschnittsfläche A L . Die Strukturfunktion t H ( x, y ) ist damit eindeutig
bestimmt. Daraus folgt ferner, dass sie auch reell ist, was man daraus erkennen kann, dass für
den Imaginärteil einer zunächst als komplex angenommenen Strukturfunktion dieselben
r
Bedingungen gelten wie für die Vektorfunktion t HΔ , von der wir gezeigt haben, dass sie
verschwindet.
Mit der Produktdarstellung Gl. (2.2.15) ist die magnetische Feldstärke nur von dem Strom in
der gleichen Querschnittsebene abhängig, was bei der Ableitung der Leitungsgleichungen in
der Regel als selbstverständlich vorausgesetzt wird. Wenn man aber das Biot-Savartsche
Gesetz kennt, könnte man vermuten, dass sie von der Verteilung des Stromes entlang der
gesamten Leitung beeinflusst wird. Das ist auf Grund der vorausgesetzten Transversalität des
Feldes jedoch nicht der Fall.
Da die Strukturfunktion weder von der Zeit t noch von der Längskoordinate z abhängt, ist das
Feldlinienbild der magnetischen Feldstärke in jeder Querschnittsebene, zu jedem Zeitpunkt
und bei jeder Zeitabhängigkeit das gleiche, also auch das gleiche wie bei einem stationären
Magnetfeld. Wir werden uns deshalb mit der Berechnung der Strukturfunktion nicht weiter
befassen. Da die Strukturfunktion reell ist, hat das Feld zu jedem Zeitpunkt dieselbe Richtung,
ist also linear polarisiert. Bei sinusförmiger Zeitabhängigkeit hat das magnetische Feld in
26
jedem Punkt des Querschnitts die gleiche Phase, was ebenfalls aus der Realität der Strukturfunktion folgt. Deshalb ist es im Prinzip gleichgültig, an welcher Stelle der Querschnittsebene
man eine Sonde zur Ableitung einer der magnetischen Feldstärke und damit einer dem Strom
proportionalen Größe anbringt. Ein Beispiel für eine magnetische Sonde zeigt Bild 2.2.1.
Bild 2.2.1: Beispiel für eine magnetische Sonde zur Messung des Stromes auf einer Leitung 2 .
Wir berechnen nun den von dem Strom zwischen Innen- und Außenleiter erzeugten, auf die
Leitungslänge bezogenen magnetischen Fluss. Dazu betrachten wir eine Fläche, die eine
Verbindungskurve Cv überstreicht, wenn man sie von z nach z + Δz parallel zur z-Achse
verschiebt. Der magnetische Fluss durch diese Fläche ist
Ψ
zK z + Δz
z + Δz r
r
= ∫ ∫ B( x ′ , y ′ , z ′ , t ) ⋅ n d s d z ′ ,
(2.2.28)
z Cv
wobei s die Wegkoordinate entlang der Verbindungslinie Cv ist. Wir benutzen die Proporr
r
tionalität von B und H nach Gl. (2.2) und können mit der Produktdarstellung Gl. (2.2.15)
für die magnetische Feldstärke die beiden Integrale separieren. Berücksichtigen wir ferner,
dass die Permeabilität μ ortsunabhängig ist, können wir sie vor das Integralzeichen ziehen und
erhalten
z K z + Δz
=μ
z + Δz
r
r
∫ i(z ′, t ) d z ′ ∫ t (x ′, y ′) ⋅ n d s .
(2.2.29)
H
z
Cv
r
Das Linienintegral über die Normalenkomponente der Strukturfunktion t H entlang der Verbindungslinie Cv ist wegen Gl. (2.2.19)
unabhängig von der Wahl der Verbindungslinie und
r
hängt wie die Strukturfunktion t H nur von der Größe und Gestalt der Querschnittsfläche ab.
Wir bezeichnen diese Größe als Geometriefaktor gL für das magnetische Feld,
r
r
g L = ∫ t H ( x ′, y ′) ⋅ n d s ;
(2.2.30)
Cv
Die Leerlaufspannung an der Sonde ist bei zeitlich sinusförmigen Vorgängen ûS = jωΦS = jωBAS, und mit
B = μH und H = îtH schließlich ûS = jωμîtHAS ; der Kurzschlussstrom der Sonde ist damit näherungsweise gleich
îS = ûS/jωLS = (μAS/LS)îtH und daher proportional zum Strom auf der Leitung. Dabei ist LS die Induktivität der
Sonde und AS die effektive Fläche der Sonde. Der Kurzschlussstrom der Sonde ist damit proportional zum Strom
auf der Leitung.
2
27
er hat die physikalische Dimension Eins. Das Integral von z bis z + Δz über den Strom können
wir noch nicht auswerten, weil uns der Verlauf des Stromes längs der Leitung in dieser Phase
der Rechnung noch nicht bekannt ist. Wir wenden deshalb den Mittelwertsatz der Integralrechnung an und erhalten
Ψ′
z K z + Δz
= μ g L i (z + ξΔz , t )Δz ,
(2.2.31)
wobei ξ einen uns noch nicht bekannten und auch nicht näher interessierenden Wert zwischen
Null und Eins annimmt. Indem wir durch Δz dividieren und anschließend den Grenzübergang
Δz → 0 durchführen, erhalten wir den auf die Leitungslänge bezogenen magnetischen Fluss
Ψ′;
Ψ ′( z , t ) = L ′ ⋅ i ( z , t ) ,
(2.2.32)
der proportional zum Strom in der gleichen Querschnittsebene ist. Den Proportionalfaktor
L′ = μ ⋅ g L
(2.2.33)
bezeichnet man als den Induktivitätsbelag der Leitung. Der Induktivitätsbelag einer leeren
(luftgefüllten) Leitung ist
L0′ = μ 0 ⋅ g L .
(2.2.34)
Der Induktivitätsbelag einer mit einem Dielektrikum gefüllten Leitung hat in der Regel die
gleiche Größe, da die relative Permeabilität von Dielektrika nur unwesentlich von Eins abweicht.
Der Geometriefaktor gL zur Berechnung des Induktivitätsbelages liegt bei normal dimensionierten Koaxialleitungen etwa zwischen den Werten 0,1 und 0,25. Die Größe des
Induktivitätsbelages wird im Wesentlichen durch die magnetische Feldkonstante μ0 bestimmt,
die den Wert
μ 0 = 4π10 −7 Vs Am = 1,257 μ H m .
(2.2.35)
hat. Der Induktivitätsbelag einer gängigen Koaxialleitung für technische Anwendungen liegt
damit etwa in dem Bereich (130…300) nH/m.
28
Aufgabe 2.2: Gegeben sei eine Koaxialleitung, deren Innenleiter den Durchmessers d und
deren Außenleiter den Innendurchmesser D besitzt; das Dielektrikum zwischen Innen- und
Außenleiter habe die Permeabilität μ = μ0.
Ermitteln Sie allgemein, d. h. in Abhängigkeit von den Leitungsdurchmessern d und D,
r
r
2.2.1 die transversale Strukturfunktion t H ( x , y ) bzw. t H ( ρ, ϕ ) , wobei ρ und ϕ
Zylinderkoordinaten sind,
2.2.2 den Geometriefaktor gL und
2.2.3 den Induktivitätsbelag L0′ .
2.2.4 Berechnen Sie den Geometriefaktor g L und den Induktivitätsbelag L0′ für
die Durchmesserverhältnisse von D/d = 2; 2,78; 3; 3,59 und 4.
Lösungen zu Aufgabe 2.2:
2.2.1 Mit den durch x = ρ ⋅ cos ϕ und y = ρ ⋅ sin ϕ definierten Zylinderkoordi
naten ρ, ϕ und z ist
r
1 1 r
t H ( ρ, ϕ ) =
⋅ ⋅ eϕ ,
2π ρ
2.2.2 g L =
1 ⎛ D⎞
ln ⎜ ⎟ ,
2π ⎝ d ⎠
2.2.3 L0′ = 200
(2.2.36a)
nH ⎛ D ⎞
⋅ ln⎜ ⎟ .
m
⎝d⎠
(2.2.36b)
2.2.4
D/d =
2
2,78
3
3,59
4
gL =
0,1103
0,1592
0,1748
0,2034
0,2206
L0′ =
139 nH/m
200 nH/m
220 nH/m
256 nH/m
280 nH/m
29
2.3 Vergleich der transversalen Strukturfunktionen
Die allgemeine Berechnung des elektrischen und magnetischen Feldes auf der Leitung schließen wir mit dem Vergleich der beiden transversalen Strukturfunktionen und mit der Berechnung der transportierten Leistung ab. Zu diesem Zweck stellen wir die Gleichungen, aus
denen die Strukturfunktionen berechnet werden, noch einmal einander gegenüber:
In der Querschnittsfläche AL gilt:
für das elektrische Feld
Gleichung
für das magnetische Feld
Gleichung
r
r
∫ tE ( x ′, y ′) ⋅ t d s = 0
(2.1.10)
r
r
∫ t H ( x ′, y ′) ⋅ t d s = 0
2.2.8)
r
r
∫ tE ( x ′, y ′) ⋅ n d s = 0
(1.1.12)
r
r
∫ t H ( x ′, y ′) ⋅ n d s = 0
(2.2.10)
C0
C0
C0
C0
und auf dem Rand RL der Querschnittsfläche gelten die Randbedingungen:
für das elektrische Feld
Gleichung
für das magnetische Feld
Gleichung
r r
tE ⋅ t = 0
(2.1.15)
r r
tH ⋅ n = 0 .
(2.2.12)
Durch die obigen, homogenen Gleichungen werden die Strukturfunktionen zunächst nur bis
auf einen konstanten Faktor bestimmt; die Festlegung dieses Faktors ergibt sich erst durch die
Normierungsbedingungen:
für das elektrische Feld
Gleichung
Für das magnetische Feld
Gleichung
r r
∫ tE ⋅ t d s = 1
(2.2.14)
r r
∫ tH ⋅ t d s = 1
(2.1.13)
Cv
C1
Die Geometriefaktoren werden durch die Integrale:
für das elektrische Feld
Gleichung
für das magnetische Feld
Gleichung
r r
∫ tE ⋅ n d s = gC
(2.1.30)
r r
∫ t H ⋅ n d s = gL
(2.2.30)
C1
Cv
definiert.
Wir definieren nun durch
r
1 r r
ez × tE
t RE =
gC
(2.3.1)
eine weitere transversale Vektorfunktion, die wegen des Vektorproduktes sowohl senkrecht
r
auf der Strukturfunktion für das elektrische Feld t E als auch senkrecht auf dem Einheits-
r
r
vektor e z steht und deshalb in der Querschnittsfläche liegt. Um sie nach t E aufzulösen,
29
30
multiplizieren wir sie mit dem Geometriefaktor gC und dann von rechts vektoriell mit dem
r
Einheitsvektor e z ; das ergibt
r
r
r
t E = g C t RE × e z .
(2.3.2)
r
Im Folgenden werden wir zeigen, dass die transversale Vektorfunktion t RE mit der transver-
r
r
salen Strukturfunktion für das magnetische Feld t H identisch ist, indem wir zeigen, dass t RE
r
r
den gleichen Bedingungen genügt wie t H . Dazu ersetzen wir t E ,in Gl. (2.1.10) durch die
rechte Seite von Gl. (2.3.2). Nach Vertauschen der vektoriellen und skalaren Multiplikation
innerhalb des Spatproduktes und mit der durch Gl. (2.5) festgelegten Beziehung zwischen den
Einheitsvektoren auf der Kurve C0 ergibt sich
r r
r
r
r
r r
r r
r
0 = ∫ t E ⋅ t d s = ∫ g C (t RE × e z ) ⋅ t d s = g C ∫ t RE ⋅ (e z × t ) d s − g C ∫ t RE ⋅ n d s .
C0
Co
C0
C0
gC verschieden von Null ist, kann nur das Integral gleich Null sein,
Da der Geometriefaktor
r
r
wodurch t RE ebenso wie t H der Gl. (2.2.10) genügt.
r
Ersetzen wir weiter t E in Gl. (2.1.12) durch den Ausdruck in Gl. (2.3.2), ergibt sich
r r
r
r r
r r
0 = ∫ t E ⋅ n d s = g C ∫ (t RE × e z ) ⋅ n d s = g C ∫ t RE ⋅ t d s ,
Co
C0
C0
r
so dass die Funktion t RE auch Gl. (2.2.8) erfüllt. Aus der transversalen Quellenfreiheit der
einen Funktion folgt also die transversale Wirbelfreiheit der anderen und umgekehrt.
r
Die Randbedingung Gl. (2.1.15) für t E auf dem Rand RL der Querschnittsfläche liefert uns
r
r
r r
r
r r
r r
r
0 = t E ⋅ t = g C (t RE × e z ) ⋅ t = g C t RE ⋅ (e z × t ) = − g C t RE ⋅ n
und somit
r
r
t RE ⋅ n = 0 auf RL ;
r
r
damit erfüllt t RE auch die für t H geltende Randbedingung Gl. (2.2.12).
r
Schließlich bleibt noch zu überprüfen, ob t RE auch die Normierungsbedingung Gl. (2.2.13)
r
r
für t H erfüllt. Dazu setzen wir t E nach Gl. (2.3.2) in Gl. (2.1.30) ein, was mit Gl. (2.5) zu
1=
1
gC
r
∫t
C1
E
r
r r
r r
r
1
⋅nds =
⋅ g C ∫ (t RE × e z ) ⋅ n d s = ∫ t RE ⋅ t d s
gC
C1
C1
r
führt, womit gezeigt ist, dass t RE auch der geforderten Normierungsbedingung
r r
∫ t RE ⋅ t d s = 1.
C1
genügt.
r
Damit genügt die Vektorfunktion t RE allen Bedingungen, denen auch die transversale Struk-
r
turfunktion t H genügt, womit wir gezeigt haben, dass beide Funktionen identisch gleich sind.
Es gilt also
30
31
bzw.
r
1 r r
tH =
ez × tE
gC
(2.3.3)
r
r r
tE = gC tH × ez .
(2.3.4)
Die beiden Strukturfunktionen stehen damit in der gesamten Querschnittsebene senkrecht
aufeinander, d. h. die Feldlinien des elektrischen Feldes schneiden die des magnetischen
Feldes in jedem Punkt des Leitungsquerschnitts senkrecht. Abgesehen von diesem Richtungsunterschied haben beide Strukturfunktionen die gleiche Abhängigkeit von den Querschnittskoordinaten.
Um auch noch
den Zusammenhang zwischen den beiden Geometriefaktoren zu ermitteln,
r
setzen wir t E nach Gl. (2.3.2) in die Normierungsbedingung Gl. (2.1.14) ein und erhalten mit
Gl. (2.6)
r r
r r r
r r r
r r
1 = ∫ t E ⋅ t d s = g C ∫ (t H × e z ) ⋅ t d s = g C ∫ t H ⋅ (e z × t )d s = g C ∫ t H ⋅ n d s .
Cv
Cv
Cv
Cv
Das Integral in dem Ausdruck ganz rechts ist nach Gl. (2.2.30) gleich dem Geometriefaktor gL
der zur Berechnung des Induktivitätsbelages erforderlich ist, so dass die beiden Geometriefaktoren durch die Beziehung
gC g L = 1
(2.3.5)
miteinander verknüpft sind. Dies gilt unabhängig von der speziellen Querschnittsform der
Leitung; damit ist auch das Produkt aus Kapazitätsbelag und Induktivitätsbelag unabhängig
hiervon,
C ′ ⋅ L ′ = (ε ⋅ g C ) ⋅ (μ ⋅ g L ) = ε ⋅ μ .
(2.3.6)
Hat man einen der beiden Leitungsbeläge berechnet, ist damit auch der andere Leitungsbelag
bekannt.
Schließlich zeigen wir noch, dass mit der getroffenen Normierung der Strukturfunktionen das
r r
Integral des Poyntingvektors E × H über die Querschnittsfläche AL, das den Leistungstransport durch die Querschnittsfläche beschreibt, gleich dem Produkt aus den hier formal als
Faktoren der elektrischen und magnetischen Feldstärke eingeführten Größen Spannung und
Strom ist, dass also
r
r
(2.3.7)
(
)
(x, y, z, t ) ⋅ er z d A = u (z, t ) ⋅ i(z, t )
E
x
,
y
,
z
,
t
×
H
∫
(
)
AL
gilt. Gleichung (2.3.7) ist mit den Produktdarstellungen
Gl. (2.1.17) und (2.2.15) genau dann
r r
erfüllt, wenn das Integral des Vektorproduktes t E × t H über die Querschnittsfläche gleich
Eins ist,
r
r
r
(2.3.8)
∫ (t E (x, y ) × t H (x, y )) ⋅ e z d A = 1 ,
AL
was wir im Folgenden zeigen werden.
Durch Umformen des Spatproduktes in dem Integral von Gl. (2.3.8) erhalten wir mit
Gl. (2.3.4)
31
32
r
r
r
r
r
r2
1
r
∫ (t E × t H ) ⋅ e z d A = ∫ t E ⋅ (t H × e z ) d A = g C ∫ t E d A .
AL
AL
AL
r
Da die transversale Strukturfunktion t E für das elektrische Feld in der Querschnittsebene
wirbelfrei ist, lässt sich eine skalare Potentialfunktion Φ E mit der Eigenschaft
r
t E = − grad trv Φ E
einführen, die bei eindeutigem Vektorfeld wegen der Randbedingung
Gl. (2.1.15) eindeutig
r
ist. Wir setzen nun den Gradienten für einen der Faktoren t E in das Integral ein und erhalten
r
r
r
1
r
∫ (t E × t H ) ⋅ e z dA = − g C ⋅ ∫ t E ⋅ grad trv Φ E d A .
AL
AL
Dieses Integral lässt sich wieder mit einer mit der partiellen Integration vergleichbaren
Gesetzmäßigkeit umformen in
r
r
r
∫ (t E × t H ) ⋅ e z d A = −
AL
r
r
1
1
⋅ ∫ div trv (Φ E t E ) d A +
⋅ ∫ Φ E ⋅ div trv (t E ) d A .
gC A
gC A
L
L
Da die im Integrand
des letzten Integrals stehende transversale Divergenz der transversalen
r
Strukturfunktion t E nach Gl. (2.1.21) identisch gleich Null ist, brauchen wir nur noch das
erste Integral rechts vom Gleichheitszeichen auszuwerten. Dazu wenden wir den Gaußschen
Satz an, müssen jedoch zuvor wieder die Querschnittsfläche entlang einer Kurve Cv aufschneiden, um eine einfach zuammenhängende Fläche A’L zu erhalten, so dass wir den Gaußschen Satz anwenden können. Der Gaußsche Satz liefert dann
r
r
r
∫A′ (t E × t H ) ⋅ e z d A = −
L
=−
1
gC
1
gC
⎧⎪
⎫⎪
r r
⎨ ∫ Φ E t E ⋅ n d A⎬
⎪⎩R′L
⎪⎭
⎧⎪
⎫⎪
r r
r r
r r
r r
⎨ ∫ Φ E t E ⋅ n d A + ∫ Φ E t E ⋅ n d A + ∫ Φ E t E ⋅ n d A + ∫ Φ E t E ⋅ n d A⎬
⎪⎩ RLi
⎪⎭
R La
Cv
C′v
Die beiden Integrale über die Verbindungskurven Cv und Cv’ heben sich gegenseitig heraus,
weil die Potentialfunktion ΦE wegen ihrer Eindeutigkeit auf beiden Verbindungslinien die
gleichen Werte annimmt und die Normaleneinheitsvektoren auf den beiden Kurvenabschnitten in entgegengesetzte Richtung zeigen. Auf den Abschnitten RLi entlang des
Innenleiters und RLa entlang des Außenleiters ist das Potential jeweils konstant, so dass wir es
vor das Integralzeichen ziehen können. Damit vereinfacht sich die rechte Seite zu
r
r
r
∫ (t E × t H ) ⋅ n d A = −
AL
1
gC
⎧⎪
⎫⎪
r r
r r
Φ
t
n
d
A
Φ
t
n
d
A
⋅
+
⋅
⎨ i ∫ E
⎬.
a ∫ E
⎪⎩ R Li
⎪⎭
R La
Das zweite Integral in der geschweiften Klammer ist nach Gl. (2.1.30) gleich gC, wobei die
dort verwendete Kurve C1 hier in den äußeren Rand RLa übergeht. Das erste Integral über den
Rand RLi des Innenleiters hat den gleichen Wert, doch wegen der entgegengesetzten Richtung
des Normaleneinheitsvektors hat es ein negatives Vorzeichen. Der Wert von gC kürzt sich
gegen den Faktor vor der geschweiften Klammern heraus, so dass wir
r r
r
∫ (t E × t H ) ⋅ n d A = − (− Φ i + Φ a ) = Φ i − Φ a
AL
32
33
erhalten.
Die Differenz der Werte der Potentialfunktion auf dem Innenleiter und dem Außenleiter ist
nach der Normierungsbedingung Gl. (2.1.14) jedoch gleich Eins, womit unsere Behauptung
Gl. (2.3.8) bewiesen ist.
33
34
Aufgabe 2.3: Überzeugen Sie sich bei der Koaxialleitung
2.3.1: anhand der Ergebnisse der Aufgaben 2.1.1 und 2.2.1 davon, dass das Produkt
der beiden Strukturfunktionen, integriert über die Querschnittsfläche der
Leitung, gleich Eins ist;
2.3.2 anhand der Ergebnisse der Aufgaben 2.1.2 und 2.2.2 davon, dass das Produkt
der beiden Geometriefaktoren gleich Eins ist und davon,
2.3.3 dass das Produkt aus Kapazitätsbelag und Induktivitätsbelag unabhängig vom
Verhältnis der Durchmesser ist.
Lösung zu Aufgabe 2.3:
v r
⎛
1
1 r ⎞ ⎛ 1 r ⎞
1
1 r
2.3.1: t E × t H = ⎜⎜
⋅ 2 ⋅ ez .
⋅ ⋅ e ρ ⎟⎟ × ⎜⎜
⋅ e ϕ ⎟⎟ =
⎠ 2π ⋅ ln (D d ) ρ
⎝ ln (D d ) ρ
⎠ ⎝ 2πρ
r r
r
∫ (t E × t H ) ⋅ e z d A =
AL
r
r
i
i
a
a
1
1
1
1
ρ
ρ
ϕ
=
d
d
d ρ = 1.
∫
∫
∫
2
2π ln (D d ) 2 π r ρ
ln (D d ) r ρ
⎛ 2 π ⎞ ⎛ 1 ⎛ D ⎞⎞
⎟⎟ ⋅ ⎜⎜
2.3.2: g C g L = ⎜⎜
ln⎜ ⎟ ⎟⎟ = 1.
(
)
D
d
ln
⎝
⎠ ⎝ 2 π ⎝ d ⎠⎠
2.3.3: C ′L ′ = εg C ⋅ μg L = εμ ⋅ g C g L = εμ .
34
35
3. Spannung und Strom auf der Leitung
Im Folgenden interessieren wir uns nur noch für die Verteilung von Spannung und Strom
längs der Leitung; die Feldstrukturen auf der Zweidrahtleitung werden wir dagegen nicht
weiter behandeln. Um die Spannungen und Ströme berechnen zu können, stellen wir zunächst
die Differentialgleichungen auf, die beide Größen miteinander verknüpfen. Wir gewinnen die
Differentialgleichungen wieder aus der Integraldarstellung der Maxwellschen Gleichungen.
Auf dem Weg dorthin erhalten wir zunächst Differenzengleichungen, die uns die Grundlage
für Ersatzschaltbilder liefern, die das Verhalten von kurzen Leitungen näherungsweise
beschreiben.
3.1 Die partiellen Differentialgleichungen für Spannung und
Strom
Durch die Wirkung des magnetischen Flusses, der sich zwischen den beiden Leitern ausbildet,
ändert sich die Spannung längs der Leitung und, bedingt durch den elektrischen Fluss von
einem Leiter zum anderen, ändert sich der Strom längs der Leitung. Um die Änderung der
Spannung längs der Leitung zu ermitteln, wenden wir das Induktionsgesetz Gl. (1.4) auf eine
Fläche Av an, die von einer Kurve Cv überstrichen wird, wenn diese parallel zur z-Richtung
r
von z nach z + Δz verschoben wird. Die Richtung des Normaleneinheitsvektors n auf der
Fläche Av legen wir so fest, dass sie mit der am Anfang von Abschnitt 2 auf der Verbindungsr
kurve Cv definierten Richtung von n übereinstimmt. Die Randkurve Rv der so definierten
Fläche Av wird durch die beiden Kurven Cv in den Ebenen z = const. und z + Δz const. gebildet
und durch die Geradenstücke zwischen diesen Kurven längs der beiden Leiteroberflächen.
r
Den Umlaufsinn auf Rv ordnen wir der Richtung des Normaleneinheitsvekors n rechtsschraubig zu (Bild 3.1.1). Dann nimmt das Induktionsgesetz Gl. (1.4) unter Berücksichtigung
r
r
der Proportionalität zwischen B und H nach Gl. (2.2) und der Produktdarstellung
Gl. (2.2.15) die Form
r
v
v
∂
∫ u(z, t ) t (x, y )⋅ t d s = − μ ∫ ∂t i(z, t ) t (x, y )⋅ n d A
E
Rv
H
(3.1.1)
Av
an.
Bild 3.1.1: Gewählter Integrationsweg zur Auswertung des Induktionsgesetzes
36
Die Teilintegrale des Umlaufintegrals längs der Geradenstücke an den Leiteroberflächen
tragen nicht zum Umlaufintegral über die elektrische Feldstärke bei, da die Tangentialkomponente der elektrischen Feldstärke auf der Leiteroberfläche voraussetzungsgemäß gleich Null
ist. Das Integral längs Cv in der Ebene z + Δz = const. wird vom Innenleiter hin zum
Außenleiter durchlaufen und ist damit gleich der Spannung in dieser Ebene; in der Ebene
z = const. erhalten wir die Spannung mit umgekehrtem Vorzeichen, weil der Integrationsweg
hier umgekehrt vom Außenleiter zurück zum Innenleiter verläuft. Damit wird aus Gl. (3.1.1)
z + Δz
r
r
∂
′
′
(
)
i
z
,
t
d
z
⋅
μ
t
∫z ∂t
∫C H (x, y ) ⋅ n d s .
v
r
Das Integral über die Strukturfunktion t H längs der Kurve Cv ist nach Gl. (2.2.30) gleich dem
Geometriefaktor gL ; zusammen mit der Permeabilität μ ergibt sich daraus der Induktivitätsbelag L’ der Leitung. Die Integration in Längsrichtung über die Integrationsvariable z’ lässt
sich in dieser Phase der Rechnung jedoch noch nicht ausführen, da die Abhängigkeit des
Stromes von z, die ja noch ermittelt werden soll, noch nicht bekannt ist. Wir wenden deshalb
den Mittelwertsatz der Integralrechnung an und erhalten
u (z + Δ z , t ) − u (z , t ) = −
u ( z + Δ z , t ) − u ( z , t ) = −Δ z ⋅ L ′
∂i( z ′, t )
∂t
= −Δz ⋅ L ′
zKΔz
∂i( z + ξΔz , t )
∂t
(3.1.2)
mit 0 ≤ ξ ≤ 1 . Dabei kennzeichnen wir mit den spitzen Klammern den räumlichen Mittelwert
der partiellen Ableitung des Stromes i nach der Zeit t über den Integrationsbereich von z bis
z + Δz , der bei einer stetigen Funktion an mindestens einer Stelle des Integrationsbereiches
auch wirklich angenommen wird. Diese uns noch unbekannte Stelle wird durch den Wert der
Zahl ξ markiert, der irgendwo zwischen Null und Eins liegt, uns aber nicht näher interessieren
muss. Wir dividieren nun beide Seiten der Gl. (3.1.2) durch Δ z und lassen dann Δ z gegen
Null gehen. Dadurch erhalten wir auf der linken Seite die partielle Ableitung der Spannung
u(z, t) nach der Koordinate z zum Zeitpunkt t und auf der rechten Seite die partielle Ableitung
des Stromes i(z, t) nach der Zeit t an der Stelle z,
∂u ( z , t )
∂i ( z , t )
= −L′
.
∂z
∂t
(3.1.3)
Diese Differentialgleichung verknüpft die Spannung mit dem Strom oder genauer gesagt, die
partielle Ableitung der Spannung nach der Längskoordinate z mit der partiellen Ableitung des
Stromes nach der Zeit t.
Als nächstes ermitteln wir die Änderung des Stromes längs der Leitung. Dazu wenden wir das
Kontinuitätsgesetz Gl. (1.5) auf einen Zylinder an, dessen Mantelfläche M1 von einer Kurve
C1, wie wir sie am Anfang von Abschnitt 2 definiert haben, überstrichen wird, wenn diese
const. verschoben
parallel zur Längsachse von der Ebene z = const. bis zur Ebene +Δ
wird (Bild 3.1.2). Das Hüllenintegral über die Normalenkomponente der elektrischen Stromr
dichte S liefert auf der Stirnfläche in der Ebene +Δ im Bereich des Innenleiters den Beitrag
Δ , und auf der gegenüber liegenden Stirnfläche den Beitrag
, ; außerhalb des
Innenleiters ist die elektrische Stromdichte identisch gleich Null. Das Integral über die zeitliche Ableitung der elektrischen Flussdichte liefert wegen der vorausgesetzten Transversalität
des elektrischen Feldes nur auf der Mantelfläche einen Beitrag zum Hüllenintegral, so dass
sich aus Gl. (1.5) mit Gl. (2.1) und der Produktdarstellung Gl. (2.1.17)
37
0 = i(z + Δ z, t ) − i(z, t ) + ε ⋅
r
r
∂
u ( z , t ) t E ( x, y ) ⋅ n d A
∫
∂t M1
(3.1.4)
ergibt. Dies können wir umformen in
z + Δz
r
r
∂
u (z ′, t ) d z ′ ⋅ ε ∫ t E ( x, y ) ⋅ n d s .
∂t
C1
z
r
Das Umlaufintegral über die transversale Strukturfunktion t E ist nach Gl. (2.1.30) gleich dem
Geometriefaktor gC, so dass sich zusammen mit der Permeabilität ε der Kapazitätsbelag C’
ergibt; mit ihm erhalten wir
0 = i( z + Δ z, t ) − i( z, t ) +
i(z + Δz, t ) − i( z, t ) = −C ′
∫
z + Δz
∫
z
∂u ( z ′, t )
d z′ .
∂t
Bild 3.1.2: Gewählter Zylinder zur Auswertung des Kontinuitätsgesetztes
Auch in diesem Fall lässt sich das Integral in dieser Phase der Herleitung noch nicht
auswerten, so dass wir den Mittelwertsatz der Integralrechnung anwenden müssen. Damit
erhalten wir
i( z + Δ z, t ) − i( z, t ) = −C ′ ⋅ Δ z ⋅
∂u ( z ′, t )
∂t
= −C ′ ⋅ Δ z ⋅
zKz + Δz
∂u ( z + ξ Δz, t )
∂t
(3.1.5)
mit 0 ≤ ξ ≤ 1 . Die spitzen Klammern bedeuten in diesem Fall den räumlichen Mittelwert der
,
nach der Zeit t über den Integrationsbereich
partiellen Ableitung der Spannung
zwischen z und
Δ ; mit dem Wert von ξ wird eine noch unbekannte Stelle in diesem
Bereich markiert, an der die partielle Ableitung den Mittelwert tatsächlich annimmt. Wir
dividieren auf beiden Seiten von Gl. (3.1.5) durch Δ und lassen anschließend Δ gegen Null
gehen. Das ergibt schließlich
∂i( z, t )
∂u ( z, t )
= −C ′
.
∂z
∂t
(3.1.6)
Diese Differentialgleichung verknüpft die partielle Ableitung des Stromes i nach der Längskoordinate z mit der partiellen Ableitung der Spannung u nach der Zeit t. Die beiden
38
Differentialgleichungen (3.1.3) und (3.1.6) bestimmen das Verhalten von Spannung und
Strom längs der Leitung.
Zum Abschluss stellen wir die beiden gefundenen partiellen Differentialgleichungen den
entsprechenden Differentialgleichungen gegenüber, die das Verhalten einer konzentrierten
Induktivität und einer entsprechenden Kapazität beschreiben.
∂u ( z, t )
∂i ( z , t )
= −L′ ⋅
,
∂z
∂t
↔
u (t ) = L
d i (t )
,
dt
∂i ( z , t )
∂u ( z, t )
= −C ′ ⋅
,
∂z
∂t
↔
i (t ) = C
d u (t )
.
dt
Bei der Auswertung des Induktionsgesetzes steht bei der Leitung anstelle der Spannung deren
partielle Ableitung nach der Längskoordinate; entsprechend steht auf der rechten Seite
anstelle der Induktivität die auf die Leitungslänge bezogene Induktivität, d. i. der Induktivitätsbelag. Bei der Auswertung des Kontinuitätsgesetzes steht links anstelle des Stromes
dessen partielle Ableitung nach der Längskoordinate; dafür steht rechts anstelle der Kapazität
der Kapazitätsbelag der Leitung. Die beiden Gleichungen lassen sich durch diese Gegenüberstellung recht gut einprägen; man beachte jedoch das negative Vorzeichen bei den die Leitung
beschreibenden Gleichungen.
Bevor wir das Verhalten von Spannung und Strom längs der Leitung mit Hilfe dieser Gleichungen näher untersuchen, leiten wir im folgenden Abschnitt Ersatzschaltbilder für kurze
Leitungen ab, die sich aus den beiden Differenzengleichungen (3.1.2) und (3.1.5) ergeben.
39
3.2 Ersatzschaltbilder für kurze Leitungen
In diesem Abschnitt entwickeln wir aus den im vorigen Abschnitt hergeleiteten Differenzengleichungen Vierpolersatzschaltbilder für eine kurze Leitung; die Ersatzschaltbilder sollen nur
konzentrierte Bauelemente enthalten. Die Klemmen 1 und 2 des Vierpolersatzschaltbildes
kennzeichnen den Innenleiter in den Ebenen z und z + Δz, die Klemmen 1’ und 2’, die wir im
Ersatzschaltbild direkt miteinander verbinden, kennzeichnen entsprechend den Außenleiter,
(Bild 3.2.1); sie sollen hier vorübergehend als Erde bezeichnet werden. Spannung und Strom
in der Ebene z = const. bilden die Eingangsgrößen u1 und i1 in dem Vierpolersatzschaltbild;
Spannung und Strom in der Ebene z + Δz = const. bilden entsprechend die Ausgangsgrößen u2
und i2 in dem Ersatzschaltbild.
Bild 3.2.1: Grundsätzlicher Aufbau eines Vierpolersatzschaltbildes für eine kurze Leitung
Anders als dies in der Vierpoltheorie üblich ist, wählen wir den Bezugspfeil für den Strom an
der Klemme 2 wie auf der Leitung so, dass er von dem Vierpol weg nach außen zeigt.
(Bezogen auf den Vierpol bedeutet dies an den Klemmen 2 und 2’ die so genannte Generatorschreibweise.) Es gelte also
u ( z ) = u1 ; i ( z ) = i1 ;
u (z + Δ z ) = u 2 ; i (z + Δ z ) = i 2 .
Die Differenzengleichungen (3.1.2) und (3.1.5), übertragen auf die entsprechenden Größen
des Vierpolersatzschaltbildes, nehmen dann die Form
d i m (t )
dt
(3.2.1)
d u m (t )
dt
(3.2.2)
u1 (t ) − u 2 (t ) = Δ z ⋅ L ′
und
i1 (t ) − i 2 (t ) = Δ z ⋅ C ′
an. Die Mittelwerte, die sich in den Gl. (3.1.2) und (3.1.5) auf den räumlichen Mittelwert in
dem Leitungsabschnitt von z bis z + Δz beziehen, werden in diesen Gleichungen, die ja
Schaltungen aus konzentrierten Bauelementen beschreiben, bei denen es also keine zAbhängigkeit mehr gibt, zunächst durch den Index m angedeutet und müssen noch in geeigneter Weise festgelegt werden. Die partielle Ableitung nach der Zeit ist durch eine gewöhnliche Ableitung ersetzt worden, da die Spannungen und Ströme hier außer von der Zeit t von
keiner weiteren Variablen mehr abhängen.
40
Es liegt nun nahe, für den räumlichen Mittelwert einen Mittelwert der entsprechenden Klemmengrößen einzuführen. Eine Wahlmöglichkeit besteht darin, im in Gl. (3.2.1) durch den
gewichteten, arithmetischen Mittelwert der beiden Klemmenströme zu ersetzen, wobei die
Größe der Gewichtsfaktoren g1 und g2 zunächst noch offen bleiben soll; sie müssen jedoch der
Nebenbedingung g1 +g2 = 1 genügen. Mit dieser Annahme ist der Mittelwert des Stromes
i m (t ) = g1 i1 (t ) + g 2 i 2 (t ) .
(3.2.3)
Damit erhalten wir aus Gl. (3.2.1)
u1 (t ) − u 2 (t ) = Δ z ⋅ g 1 L ′ ⋅
d i1 (t )
d i (t )
+ Δ z ⋅ g 2 L′ ⋅ 2 .
dt
dt
(3.2.4)
Gleichung (3.2.4) lässt sich als Maschengleichung interpretieren. Zwischen den Klemmen 1
und 2 muss dann ein Zweig mit der Induktivität Δ z ⋅ g 1 L ′ liegen, die von dem Strom i1 durchflossen wird, und ein Zweig mit der Induktivität Δ z ⋅ g 2 L ′ , die von dem Strom i2 durchflossen wird. Wenn wir weiter zulassen, dass die Ströme i1 und i2 in den beiden Längszweigen
unterschiedliche Werte annehmen können, muss zwischen diesen beiden Zweigen ein Knoten
liegen, der eine Änderung des Stromes ermöglicht. Interpretieren wir nun Gl. (3.2.2) als
Knotengleichung für diesen Knoten, dann muss zwischen diesem Knoten und der Erde eine
Kapazität der Größe Δ z ⋅ C ′ liegen, an der die Spannung um anliegt. Damit erhalten wir ein TErsatzschaltbild für die Leitung, bei dem die Induktivitäten in den Längszweigen durch die
Wahl der Gewichtsfaktoren beeinflusst werden können; ihre Summe ist jedoch immer gleich
der gesamten Induktivität Δ z ⋅ L ′ des betrachteten Leitungsabschnittes. Wählen wir die
Gewichtsfaktoren jeweils zu ½, erhalten wir ein symmetrisches T-Glied, setzen wir einen der
beiden Gewichtsfaktoren zu Null, erhalten wir ein so genanntes Halbglied (Bild 3.2.2).
Bild 3.2.2: T-Ersatzschaltbilder für eine kurze Leitung
a) Allgemeines T-Ersatzschaltbild
b) Symmetrisches T-Ersatzschaltbild (g1 = g2 =½)
c) Halbglied mit rechtsseitigem Längszweig (g1 = 0)
d) Halbglied mit linksseitigem Längszweig (g2 = 0)
41
Ebenso ist es möglich, für den Mittelwert der Spannung um in Gl. (3.2.2) den gewichteten,
arithmetischen Mittelwert der beiden Klemmenspannungen einzusetzen,
u m (t ) = g1 u1 (t ) + g 2 u 2 (t ) ,
(3.2.5)
wobei g1 und g2 geeignet gewählte Gewichtsfaktoren für die Spannungen sind. Aus Gl. (3.2.2)
erhalten wir dann
i1 (t ) − i 2 (t ) = Δ z ⋅ g 1 C ′
d u1 (t )
d u (t )
+ Δz ⋅ g2 C′ 2 .
dz
dt
(3.2.6)
Diese Gleichung können wir als Knotengleichung für einen so genannten Superknoten interpretieren. Fassen wir die Eingangsklemme 1 und die Ausgangsklemme 2 samt dem
dazwischen liegenden Zweig zu einem Superknoten zusammen, so fließt an der Klemme 1 der
Strom i1 in diesen Superknoten hinein und an der Klemme 2 der Strom i2 hinaus. Weiter
beschreibt der erste Term auf der rechten Seite von Gl. (3.2.6) einen Strom durch einen
Kondensator der Kapazität Δ z ⋅ g 1 C ′ , der parallel zu den Eingangsklemmen liegen muss, und
der zweite Term einen Strom durch eine Kapazität der Größe Δ z ⋅ g 2 C ′ , der parallel zu den
Ausgangsklemmen liegen muss. Damit Gl. (3.2.6) erfüllt wird, darf darüber hinaus kein
weiterer Strom aus dem Knoten herausfließen. Die restliche Schaltung kann also nur noch aus
Bild 3.2.3: Π-Ersatzschaltbilder für eine kurze Leitung
a) Allgemeines Π-Ersatzschaltbild
b) Symmetrisches Π-Glied (g1 = g2 =½)
c) Halbglied mit rechtsseitigem Querzweig (g1 = 0)
d) Halbglied mit linksseitigem Querzweig (g2 = 0)
einem Längszweig zwischen den Klemmen 1 und 2 bestehen. Interpretieren wir nun
Gl. (3.2.1) als Maschengleichung, erkennen wir, dass in diesem Zweig eine Induktivität der
Größe Δ z ⋅ L′ liegen muss, die von dem Strom im durchflossen wird. Damit haben wir ein ΠErsatzschaltbild für die Leitung entworfen, dessen Kapazitäten Δ z ⋅ g 1C ′ und Δ z ⋅ g 2 C ′ in
42
den beiden Querzweigen durch die Wahl der Gewichtsfaktoren beeinflusst werden können,
deren Summe aber immer gleich der gesamten Kapazität Δ z ⋅ C ′ des betrachteten
Leitungsabschnittes ist (Bild 3.2.3).
Wählen wir die Gewichtsfaktoren jeweils zu ½ , erhalten wir ein symmetrisches Π-Glied,
wählen wir einen der beiden Gewichtsfaktoren zu Null, erhalten wir wieder Halbglieder, so
wie wir sie bereits als Spezialfälle des T-Gliedes in Bild 3.2.2 gefunden haben. Es liegt
natürlich eine gewisse Willkür darin, in den beiden Differenzengleichungen (3.1.2) und
(3.1.5) den räumlichen Mittelwerte durch den jeweiligen gewichteten arithmetischen
Mittelwert der entsprechenden Klemmengrößen zu ersetzen; dies kann auch nur dann zu
brauchbaren Ergebnissen führen, wenn der Spannungsverlauf in dem durch das Ersatzschaltbild ersetzten Leitungsabschnitt keinen zu starken räumlichen Schwankungen unterworfen ist; aus diesem Grund müssen wir uns auf kurze Leitungen beschränken.
Die Näherung wird bei einem kontinuierlich ansteigenden oder abfallenden Spannungsverlauf
um so besser sein, je geringer die Krümmung des Kurvenverlaufs ist 1 , d. h. je kleiner die
zweite Ableitung nach der Längskoordinate z ist. Das gilt natürlich auch für den Strom. Da
die zweite Ableitung nach z proportional zur zweiten Ableitung nach der Zeit t ist, wie wir im
folgenden Abschnitt noch zeigen werden, darf auch der zeitliche Verlauf der Spannung
sich nicht zu stark ändern. Die Ersatzschaltbilder können also entweder bei gegebener
Anregung nur für kurze Leitungen eine gute Näherung darstellen oder bei gegebener
Leitungslänge für nur langsame zeitliche Änderungen von Spannung und Strom. Was diese
Aussage genauer bedeutet, werden wir bei der Behandlung zeitlich sinusförmiger Anregungen
besser verstehen.
1
Bei einem linearen Verlauf der Spannung ist der räumliche Mittelwert der Spannung in dem Leitungsabschnitt
von z bis z+Δz exakt gleich dem arithmetischen Mittelwert der beiden Spannungen in den Ebenen z und z+Δz,
jeweils gewichtet mit dem Gewichtsfakor ½; das Gleiche gilt für den Verlauf des Stromes. Im ersten Fall können
wir erwarten dass das symmetrische Π–Ersatschaltbild die bessere Näherung liefert, im zweiten Fall das
symmetrische T-Glied.
43
Aufgabe 3.2: Berechnen Sie für eine zeitlich sinusförmige Anregung die Eingangsimpedanz
Z1 einer kurzen Leitung der Länge Δz, wenn diese mit einem Widerstand der
Größe R = 1/G abgeschlossen ist und zwar
3.2.1: anhand eines Ersatzschaltbildes, das aus einem Halbglied mit linksseitigem
Querzweig besteht und
3.2.2: die Eingangsadmittanz Y1, anhand eines Ersatzschaltbildes, das aus einem
Halbglied mit rechtsseitigem Querzweig besteht.
3.2.3: Führen Sie die normierende Kreisfrequenz ω N = 1
(
)
L ′C ′Δ z und den Nor-
mierungswiderstand R N = L ′ C ′ ein und berechnen Sie als Näherung die
Eingangsgrößen für den Fall ω << ω N bzw. Δ z << 1 ω L ′C ′ für die beiden
Fälle R << R N und R >> R N .
3.2.4 Ermitteln Sie Z1 und Y1 für den Abschluss der Halbglieder mit einem
Widerstand, der gleich dem oben gewählten Normierungswiderstand RN. ist.
Lösung zu Aufgabe 3.2
3.2.1: Z 1 =
R + jωL ′Δz
.
1 + jωC ′(R + jωL ′Δz )
3.2.2: Y1 =
G + jωC ′Δz
.
1 + jωL ′(G + jωC ′Δz )
3.2.3: Z 1 =
Y1 =
R + jωL ′Δz
ω ⎛ R
ω
⎜⎜
+j
1+ j
ω N ⎝ RN
ωN
⎞
⎟⎟
⎠
G + jωC ′Δz
ω ⎛ R
ω
⎜⎜
+j
1+ j
ω N ⎝ RN
ωN
⎞
⎟⎟
⎠
1+ j
3.2.4: Z 1 = R N
Y1 =
2
ω
1+ j
ωN
1
⋅
RN
ω
ωN
⎛
ω ⎞
⎜⎜1 + j
⎟
ω N ⎟⎠
⎝
1+ j
1+ j
≈ R + jωL ′Δz ,
ω
ωN
≈ G + jωC ′Δz
,
ω
ωN
⎛
ω ⎞
⎜⎜1 + j
⎟⎟
ω
N
⎝
⎠
.2
Anmerkung: Bei Verwendung der exakten Leitungsgleichungen würden sich die Werte Z1 =RN und Y1 = 1/RN
einstellen.
44
3.3 Der Verlauf von Spannung und Strom längs der Leitung
Nachdem wir die Differenzengleichungen abgeleitet und mit ihrer Hilfe Ersatzschaltbilder 1
für eine kurze Leitung entworfen haben, beschäftigen wir uns in diesem Abschnitt damit, die
aus den Differenzengleichungen hergeleiteten verkoppelten partiellen Differentialgleichungen
(3.1.3) und (3.1.6), die die Spannung und den Strom miteinander verknüpfen, zu lösen. Beide
Gleichungen seien hier noch einmal angegeben,
∂u (z, t )
∂i(z , t )
= −L′
∂z
∂t
(3.3.1)
∂i(z, t )
∂u (z, t )
.
= −C ′
∂z
∂t
(3.3.2)
und
Eine Möglichkeit, die Beziehungen zwischen Spannung und Strom im mathematischen Sinn
zu entkoppeln, besteht darin, Gl. (3.3.1) auf beiden Seiten zunächst partiell nach der
Längskoordinate z zu differenzieren; das ergibt
∂ 2 u (z, t )
∂ ⎛ ∂i(z, t ) ⎞
⎟
= − L ′ ⎜⎜
2
∂ z ⎝ ∂t ⎟⎠ .
∂z
Kann man die zweimalige stetige Differenzierbarkeit des Stromes i nach den beiden
Variablen z und t voraussetzen, darf die Reihenfolge der Differentiationen auf der rechten
Seite der Gleichung vertauscht werden. Durch das Vertauschen erhalten wir
∂ 2 u (z, t )
∂ ⎛ ∂i ( z , t ) ⎞
= −L′ ⎜
⎟
2
∂t ⎝ ∂z ⎠ .
∂z
Dadurch können wir die partielle Ableitung des Stromes i nach der Koordinate z durch die
rechte Seite von Gl. (3.3.2) ersetzen; das ergibt
∂ 2 u (z, t )
∂ 2 u (z, t )
′
′
=
L
C
∂z2
∂t 2 .
(3.3.3)
Damit haben wir eine Differentialgleichung gefunden, die nur noch die Spannung u(z, t) als
Funktion enthält; sie wird als Wellengleichung bezeichnet.
Vollziehen wir die gleiche Prozedur in umgekehrter Reihenfolge, d. h. differenzieren wir
zunächst Gl. (3.3.2) auf beiden Seiten nach z, erhalten wir bei entsprechendem Vorgehen die
Wellengleichung für den Strom,
∂ 2 i(z, t )
∂ 2 i(z, t )
′
′
=
L
C
.
∂z2
∂t 2
(3.3.4)
Damit haben wir die Differentialgleichungen für Spannung und Strom entkoppelt und können
nun jede der beiden Differentialgleichungen (3.3.3) und (3.3.4) getrennt voneinander lösen.
Obwohl man die allgemeinen Lösungen für Spannung und Strom getrennt voneinander finden
kann, beeinflussen sich Spannung und Strom physikalisch gesehen dennoch nach wie vor
1
Gelegentlich wird das Ersatzschaltbild, dessen Gültigkeit hier nachgewiesen wurde, als Ausgangspunkt für die
Ableitung der partiellen Differentialgleichungen verwendet, was nach den eingangs gemachten Bemerkungen
jedoch nicht ganz korrekt ist.
45
gegenseitig, so dass es erforderlich ist, die beiden Lösungen mit Hilfe der Gl. (3.3.1) und
(3.3.2) aneinander anzupassen.
Um Gl. (3.3.3) zu lösen, geht man i. a. von dem nach dem französischen Mathematiker
d’ALEMBERT benannten Lösungsansatz aus, der in der Annahme besteht, dass die Funktionen
von nur einer Variablen abhängen, die ihrerseits eine Linearkombination der beiden unabhängigen Variablen z und t ist. Für die Spannung bezeichnen wir diese Variable mit ζ1 ; der
Ansatz für die Spannung ist also
u ( z , t ) = f (ζ 1 )
mit
ζ 1 = a z + bt ,
wobei a und b noch zu bestimmende Konstanten 2 sind. Diesen Ansatz setzen wir in
Gl. (3.3.3) ein. Beachten wir noch die Kettenregel, wird aus der partiellen Ableitung nach z
der auf die Funktion f anzuwendende Differentialoperator
∂ ∂ζ 1 d
d
=
⋅
=a
,
∂z ∂z dζ 1
dζ1
der, nacheinander angewendet,
∂u (z , t )
= a ⋅ f ′(ζ 1 )
∂z
und
∂ 2 u (z, t )
d
(a ⋅ f ′(ζ 1 )) = a 2 f ′′(ζ 1 )
=a
2
dζ1
∂z
(3.3.5)
liefert. Entsprechend erhalten wir für die zweite partielle Ableitung der Spannung nach der
Zeit t
∂ 2 u (z, t )
= b 2 f ′′(ζ 1 ) .
2
∂t
(3.3.6)
Durch Einsetzen in die Wellengleichung (3.3.3) ergibt sich
(a
2
)
− L ′C ′b 2 ⋅ f ′′(ζ 1 ) = 0 .
(3.3.7)
Die Lösung für den Strom gewinnen wir auf gleichem Wege durch den Ansatz
i (z , t ) = g (ζ 2 )
mit
ζ 2 = d z + et
zu
(d
2
)
− L ′C ′e 2 ⋅ g ′′(ζ 2 ) = 0 .
(3.3.8)
Gleichung (3.3.7) wird erfüllt, wenn
2
Die hier eingeführten Buchstaben für die Funktionen und Konstanten sind nur von lokaler Bedeutung und
können an anderer Stelle und in einem anderen Zusammenhang eine andere Bedeutung haben.
46
a) entweder die zweite Ableitung von f nach ζ1 zu Null wird (dann können die Konstanten
a und b beliebige Werte annehmen) oder
b) wenn der Klammerausdruck den Wert Null annimmt. (Dann darf die Funktion f(ζ1)
einen beliebigen 3 Verlauf haben.)
Fall a: Die zweimalige Integration von f ′′ ergibt
u (z, t ) = f (ζ 1 ) = U 0 + K ζ 1 = U 0 + K (a z + bt ) = U 0 + A z + Bt .
(3.3.9)
Für den Strom erhält man aus Gl. (3.3.8) bei entsprechendem Vorgehen
i (z , t ) = I 0 + D z + E t .
(3.3.10)
Die gefundenen Lösungen für Spannung und Strom sind jedoch, wie bereits betont, nicht
unabhängig voneinander. Um sie einander anzupassen, setzen wir sie in Gl. (3.3.1) und (3.3.2)
ein und erhalten zwischen den Integrationskonstanten die Beziehungen
A = − L ′E
und
D = −C ′B .
Von den vier Konstanten können also nur zwei frei gewählt werden; die Konstanten U0 und I0
setzen wir im Folgenden zu Null; sie können mit beliebigen Werten Teile einer jeden Lösung
sein. Die beiden verbleibenden frei wählbaren Konstanten B und E liefern je eine unabhängige Lösung, deren Überlagerung die Gesamtlösung darstellt. Zunächst setzen wir E = 0,
wodurch auch A = 0 gilt, und führen für die Konstante B, da sie die Dimension Spannung
durch Zeit hat, den Ausdruck B = U1/T1 ein. Damit erhalten wir die Teillösung
u (z, t ) = U 1 ⋅
t
T1
(3.3.11)
U1
⋅z.
T1
(3.3.12)
und
i ( z , t ) = −C ′ ⋅
Diese Lösung beschreibt einen Zustand, bei dem die Spannung längs der Leitung überall den
gleichen Wert annimmt, der allerdings linear mit der Zeit anwächst. Die Leitung wird hierbei
gleichmäßig über die Länge verteilt aufgeladen und dies mit zeitlich linear anwachsendem
Ladungsbelag. Der Strom, der dazu erforderlich ist, ist ein Gleichstrom, der entlang der
Leitung linear abnimmt, um die von ihm transportierte Ladung gleichmäßig über die Länge
der Leitung zu verteilen; in dem hier gewählten Fall ohne zusätzliche Konstante zeigt der
Vorzeichenwechsel bei z = 0 an, dass die Leitung von beiden Leitungsenden her aufgeladen
wird.
Um die zweite unabhängige Lösung zu gewinnen, setzen wir B = 0 und damit auch D = 0. Da
die Konstante E die Dimension Strom durch Zeit hat, ersetzen wir sie in diesem Fall durch
den Quotient E = I2/T2. Damit erhalten wir die zweite Teillösung zu
i(z, t ) = I 2
3
t
T2
(3.3.13)
Da wir die Differenzierbarkeit des zeitlichen und räumlichen Verlaufs von Spannung und Strom vorausgesetzt
haben, muss f natürlich differenzierbar sein.
47
und
u (z, t ) = − L ′
I2
z.
T2
(3.3.14)
In diesem Fall haben wir als Lösung einen über die Leitungslänge konstanten Strom, der
linear mit der Zeit ansteigt und dadurch eine zeitlich konstante, über die Leitungslänge
abfallende Spannung induziert.
Die allgemeine Lösung setzt sich für den Fall a aus der Überlagerung der beiden oben
gefundenen Teillösungen zusammen. Beide Lösungen haben für technische Fragestellungen
jedoch keine besondere Bedeutung.
Fall b: Die zweite Möglichkeit, Gl. (3.3.7) zu erfüllen, besteht darin, den Klammerausdruck
für beliebige Funktionen f gleich Null zu setzen. Daraus ergibt sich für die Konstanten die
Forderung
a 2 = L ′C ′b 2
bzw.
b
1
.
=±
a
L ′C ′
(3.3.15)
Da die rechte Seite von Gl. (3.3.15) die Dimension einer Geschwindigkeit hat; führen wir für
sie die Konstante v ein,
v=
1
,
L ′C ′
(3.3.16)
von der wir noch zeigen werden, dass sie tatsächlich auch aus physikalischer Sicht eine
Geschwindigkeit bedeutet. Mit den beiden Vorzeichen in Gl. (3.3.15) erhalten wir zwei
Lösungen für f und zwar
f (ζ 1 ) = f 1 (a ⋅ (z − vt )) = u h ( z − vt )
und
f (ζ 1 ) = f 2 (a ⋅ ( z + vt )) = u r ( z + vt ) .
Fügen wir schließlich noch eine Integrationskonstante U0 hinzu, erhalten wir durch Überlagerung der beiden Teillösung für die Spannung den Ausdruck
u ( z , t ) = u h ( z − vt ) + u r ( z + vt ) + U 0
(3.3.17)
und in entsprechender Weise aus Gl. (3.3.8) für den Strom den Ausdruck
i(z , t ) = i h ( z − vt ) + i r ( z + vt ) + I 0 .
(3.3.18)
Die Bedeutung der hier eingeführten Funktionen uh, ur, ih und ir werden wir weiter unten noch
näher behandeln; ebenso verschieben wir die Erklärung für die Wahl der hochgestellten
Indizes auf einen späteren Zeitpunkt. Die Anpassung der Teilströme ih und ir an die Teilspannungen uh und ur durch Einsetzen in Gl. (3.3.1) und (3.3.2) überlassen wir an dieser
Stelle dem Leser. Den Zusammenhang zwischen den Lösungen für Spannung und Strom
werden wir bei den folgenden Ausführungen jedoch auf einem anderen Weg herstellen.
48
Da wir oben von einem speziellen Lösungsansatz ausgegangen sind, können wir noch nicht
sicher sein, dass wir mit den beiden Gl. (3.3.17) und (3.3.18) auch wirklich alle Lösungen der
partiellen Differentialgleichungen erfasst haben. Außerdem mussten wir die zweimalige
stetige Differenzierbarkeit der Lösungsfunktionen voraussetzen, wodurch wir in deren ansonsten freien Wahl eingeschränkt sind. Aus diesen Gründen schlagen wir nun einen weiteren
Weg zur Lösung der Differentialgleichungen ein, bei dem wir uns nicht auf diese Voraussetzungen stützen müssen.
Zu diesem Zweck fassen wir zunächst die beiden Gl. (3.3.1) und (3.3.2) zu einer Matrizengleichung in der Form
⎛ 0 L ′ ⎞ ∂ ⎛ u ( z , t )⎞
∂ ⎛ u ( z , t )⎞
⎜⎜
⎟⎟ = −⎜⎜
⎟⎟ ⎜⎜
⎟⎟ .
′
(
)
C
0
i
z
,
t
∂ z ⎝ i(z, t ) ⎠
∂
t
⎝
⎠ ⎝
⎠
(3.3.19)
zusammen. Die Entkopplung der beiden Differentialgleichungen, die wir nach wie vor anstreben, bedeutet aus mathematischer Sicht eine Diagonalisierung der Matrix. Sind nämlich
nur die Elemente auf der Hauptdiagonale verschieden von Null, zerfällt Gl. (3.3.19) in zwei
getrennte Gleichungen, die jeweils nur eine der beiden zu lösenden Funktionen enthalten,
d. h. eine für die Spannung oder eine für den Strom. Eine Diagonalisierung der Matrix ist bei
reellen, symmetrischen Matrizen durch eine so genannte Orthogonaltransformation der Variablen immer möglich. Bei der Matrix in Gl. (3.3.19) sind jedoch die Elemente außerhalb der
Hauptdiagonale nicht nur verschieden voneinander, sie haben auch noch unterschiedliche
physikalische Dimensionen, da die beiden gesuchten Funktionen von unterschiedlicher physikalischer Dimension sind. Diesen Mangel können wir jedoch dadurch beheben, dass wir für
den Strom eine ihm proportionale Spannung i⋅RN einführen, wobei der erforderliche konstante
Normierungswiderstand RN zunächst noch offen ist. Wir erweitern Gl. (3.3.1) auf der rechten
Seite mit dem Normierungswiderstand RN und multiplizieren Gl. (3.3.2) auf beiden Seiten mit
RN und erhalten dadurch
∂u ( z, t )
L ′ ∂i (z , t ) R N
=−
∂z
RN
∂t
und
∂i ( z , t )R N
∂u (z , t )
= −C ′R N
,
∂z
∂t
was, wieder zu einer Matrizengleichung zusammengefasst,
∂ ⎛ u
⎜
∂ z ⎜⎝ i R N
⎛ 0
⎞
⎟⎟ = −⎜⎜
⎝ C ′R N
⎠
L′ RN ⎞ ∂ ⎛ u
⎟ ⎜
0 ⎟⎠ ∂ t ⎜⎝ i R N
⎞
⎟⎟
⎠
(3.3.20)
ergibt. Durch diese Maßnahme haben wir nicht nur erreicht, dass die Elemente der Matrix
dimensionsgleich geworden sind; die außerhalb der Hauptdiagonale stehenden Elemente der
Matrix lassen sich nun auch noch durch entsprechende Wahl des Normierungswiderstandes
RN unmittelbar einander gleichsetzen. Aus der Forderung
C ′R N =
L′
RN
erhalten wir für den Normierungswiderstand den Wert
49
RN = ±
L′
= ±Z L .
C′
Die Größe
ZL =
L′
C′
(3.3.21)
wird als Wellenwiderstand der Leitung bezeichnet; auf seine Bedeutung werden wir noch
näher eingehen.
Mit RN = ZL nehmen die beiden von Null verschiedenen Matrixelemente in Gl. (3.3.20) den
Wert L ′C ′ an, dessen Kehrwert wir bereits in Gl. (3.3.16) mit v bezeichnet haben. Damit
erhalten wir die symmetrische Matrizengleichung
1 ∂ ⎛ 0 1 ⎞⎛ u ⎞
∂ ⎛ u ⎞
⎟.
⎟⎟ = −
⎜⎜
⎟⎜
⎜
v ∂t ⎜⎝ 1 0 ⎟⎠⎜⎝ iZ L ⎟⎠
∂ z ⎝iZ L ⎠
(3.3.22)
Zunächst suchen wir speziell Lösungen, bei denen die Spaltenmatrix auf der linken Seite und
die aus der Matrizenmultiplikation hervorgehende Spaltenmatrix auf der rechten Seite der
Gleichung einander proportional sind, für die also
⎛ u ⎞ ⎛ 0 1 ⎞⎛ u ⎞
⎟⎟
⎟⎟ = ⎜⎜
⎟⎟⎜⎜
⎝ i Z L ⎠ ⎝ 1 0 ⎠⎝ i Z L ⎠
λ ⎜⎜
(3.3.23a)
gilt, wobei die Gleichung nicht für beliebige Werte von λ erfüllt sein kann. Um den zur
Erfüllung der Gleichung erforderlichen Wert von λ zu bestimmen, bringen wir den auf der
linken Seite von Gl. (3.3.23a) stehenden Ausdruck auf die rechte Seite und erhalten die
homogene Gleichung
⎛0⎞ ⎛ − λ
⎜⎜ ⎟⎟ = ⎜⎜
⎝0⎠ ⎝ 1
1 ⎞⎛ u ⎞
⎟.
⎟⎜
− λ ⎟⎠⎜⎝ i Z L ⎟⎠
(3.3.23b)
Man bezeichnet Gl. (3.3.23b) als Eigenwertgleichung. Sie hat nur dann nichttriviale Lösungen, d. h. Lösungen, bei denen Spannung und Strom nicht identisch verschwinden, wenn die
Determinante der Matrix in Gl. (3.3.23b) den Wert Null annimmt,
−λ
1
1
= λ2 − 1 = 0 .
−λ
Das ist genau dann der Fall, wenn der Eigenwert λ einen der Werte +1 und −1 annimmt.
Für λ = λh =+1 gilt
u = iZ L .
Wir bezeichnen die Spannung für diese Teillösung mit uh; für Spannung und Strom gilt dann,
in Matrizenschreibweise dargestellt,
⎛ u ⎞ ⎛ 1⎞ h
⎟⎟ = ⎜⎜ ⎟⎟u .
⎜⎜
⎝ i Z L ⎠ ⎝ 1⎠
Für λ = λr = −1 ist
50
u = −i Z L .
Wir bezeichnen die Spannung für diese Teillösung mit ur und erhalten, in Matrizenschreibweise dargestellt,
⎛ u ⎞ ⎛ 1⎞ r
⎟⎟ = ⎜⎜ ⎟⎟ u .
⎜⎜
⎝ i Z L ⎠ ⎝ − 1⎠
Aus der Überlagerung beider Teillösungen ergibt sich für Spannung und Strom
⎛ u ⎞ ⎛1⎞ h ⎛ 1 ⎞ r ⎛1 1 ⎞⎛ u h ⎞
⎜⎜
⎟⎟ = ⎜⎜ ⎟⎟ u + ⎜⎜ ⎟⎟ u = ⎜⎜
⎟⎟⎜⎜ r ⎟⎟ .
i
Z
1
1
1
1
−
−
⎝ ⎠
⎝
⎠⎝ u ⎠
⎝ L⎠ ⎝ ⎠
(3.3.24)
Umgekehrt lässt sich zu jeder denkbaren Lösung von Spannung und Strom, unabhängig
davon, wie man zu dieser Lösung gekommen ist, das Größenpaar uh und ur durch
⎛ u h ⎞ 1 ⎛1 1 ⎞⎛ u ⎞
⎜ ⎟ = ⎜⎜
⎜ u r ⎟ 2 1 − 1⎟⎟⎜⎜ iZ ⎟⎟ .
⎝
⎠⎝ L ⎠
⎝ ⎠
(3.3.25)
berechnen. Das zeigt, dass wir mit uh und ur lediglich eine Linearkombination der eigentlich
gesuchten Funktionen u und i gebildet haben, deren Lösung wir jetzt anstelle der von u und i
suchen können. Durch dieses Vorgehen wird, obwohl wir zunächst von einer speziellen
Lösung von Gl. (3.3.22) ausgegangen sind, die Zahl der möglichen Lösungen für u und i in
keiner Weise eingeschränkt. Wir setzen nun die Darstellung von Spannung und Strom nach
Gl. (3.3.24) in Gl. (3.3.22) ein und erhalten
⎛1 1 ⎞ ∂ ⎛ u h ⎞
1 ∂ ⎛ 0 1 ⎞ ⎛1 1 ⎞ ⎛ u h ⎞
1 ∂ ⎛1 − 1⎞ ⎛ u h ⎞
⎜⎜
⎟⎟ ⎜⎜ r ⎟⎟ = − ⋅ ⎜⎜
⎟⎟ ⎜⎜
⎟⎟ ⎜⎜ r ⎟⎟ = − ⋅ ⎜⎜
⎟⎜ ⎟
v ∂t ⎝ 1 0 ⎠ ⎝1 − 1⎠ ⎝ u ⎠
v ∂t ⎝1 1 ⎟⎠ ⎜⎝ u r ⎟⎠
⎝1 − 1⎠ ∂ z ⎝ u ⎠
und durch Multiplikation von links mit der bereits in Gl. (3.3.25) enthaltenen Umkehrmatrix
1 ∂ 1 ⎛1 1 ⎞ ⎛1 − 1⎞ ⎛ u h ⎞
1 ∂ ⎛1 0 ⎞ ⎛u h ⎞
1 ∂ ⎛ uh ⎞
∂ ⎛u h ⎞
⎜ r ⎟=− ⋅
⎜
⎟
⎜
⎟
⎟.
⎜
⎟
⎜
⎟
⎜
⎟
=
−
=
−
⋅ ⎜
v ∂t 2 ⎜⎝1 − 1⎟⎠ ⎜⎝1 1 ⎟⎠ ⎜⎝ u r ⎟⎠
∂ z ⎜⎝ u ⎟⎠
v ∂t ⎜⎝ 0 − 1⎟⎠ ⎜⎝ u r ⎟⎠
v ∂t ⎜⎝ − u r ⎟⎠
Damit haben wir die beiden Differentialgleichungen entkoppelt; in einzelne Gleichungen
aufgelöst erhalten wir
∂u h
1 ∂u h
=−
∂z
v ∂t
(3.3.26)
∂u r
1 ∂u r
=+
.
∂z
v ∂t
(3.3.27)
und
Um die Lösungen dieser entkoppelten Differentialgleichungen zu finden, ersetzen wir die Zeit
durch eine ihr proportionale Längenkoordinate, die wir mit w bezeichnen,
w = vt .
(3.3.28)
Mit ihr wird aus Gl. (3.3.26)
∂u h ∂u h
+
=0
∂z
∂w
(3.3.29)
51
und aus Gl. (3.3.27)
∂u r ∂u r
−
=0.
∂z
∂w
(3.3.30)
Die beiden Spannungen uh und ur bilden, betrachtet als Funktionen der Ortskoordinaten z und
w, jeweils ein Gebirge über der (z, w)-Ebene, wobei die Koordinatenachsen für z und w senkrecht aufeinander stehen sollen. Die Größe und Richtung der Steigung in diesem Gebirge wird
durch den Gradienten beschrieben, der für die Spannung uh durch
grad(u
h
)
r ∂u h r ∂u h
= ez
+ ew
∂z
∂w
(3.3.31)
angegeben werden kann; e und e sind dabei orthogonale Einheitsvektoren in der z, wEbene. Multipliziert man diesen Gradienten mit einem beliebigen Einheitsvektor , der in der
z, w-Ebene liegt, erhält man die Steigung der Funktion uh in Richtung dieses Einheitsvektors.
Nun kann die linke Seite der Gl. (3.3.29) als das 2 -fache des Skalarproduktes aus dem
Gradient der Funktion uh und dem Einheitsvektor
1 r r
r
(e z + e w )
eh =
2
(3.3.32)
interpretiert werden. Da dieses Skalarprodukt nach Gl. (3.3.29) gleich Null ist, ändert sich uh
nicht, wenn man in Richtung dieses Einheitsvektors fortschreitet; man bewegt sich dann auf
einer so genannten Höhenlinie des uh-Gebirges. Da die Richtungen des Einheitsvektors und
damit auch die der Höhenlinien nach Gl. (3.3.31) für alle Werte von z und w gleich sind, sind
r
die Höhenlinien Geraden in der z, w-Ebene, die in der durch den Einheitsvektor e h gegebenen Richtung verlaufen; sie werden durch z = w + const. bzw. durch
z − vt = const.
beschrieben; die Spannung uh hängt somit nur von dieser Größe ab,
u h ( z, t ) = u h ( z − vt ) .
Entsprechend ist die linke Seite von Gl. (3.3.30) das
Gradienten von ur und dem Einheitsvektor
1 r r
r
(e z − e w ) .
er =
2
(3.3.33)
2 -fache des Skalarproduktes aus dem
(3.3.34)
Die Höhenlinien sind in diesem Fall Geraden, die durch z = − w + cont. beschrieben werden
bzw. durch
z + vt = const.
Die Spannung ur hängt damit nur von dieser Größe ab,
u r ( z, t ) = u r ( z + vt ) .
(3.3.35)
Mit Gl. (3.3.33) und (3.3.35) haben wir zwei Teillösungen gefunden, deren Überlagerung
entsprechend Gl. (3.3.24) die Gesamtlösungen
u ( z, t ) = u h ( z − vt ) + u r ( z + vt )
und
(3.3.36)
52
i(z, t ) =
(
)
1 h
u ( z − vt ) − u r ( z + vt )
ZL
(3.3.37)
für Spannung und Strom auf der Leitung darstellen. Damit haben wir die gleichen Lösungen
gefunden wie unter dem oben behandelten Fall b, dort jedoch mit Hilfe eines willkürlich
gewählten Lösungsansatzes.
Bild 3.3.1: Höhenlinien der Funktionen uh und ur.
Wir gehen nun dazu über, die Teillösungen uh und ur zu interpretieren. Dazu betrachten wir
zunächst den Verlauf der Teillösung uh entlang der Leitung zum Zeitpunkt t = t0,
u ( z , t 0 ) = u h ( z − vt 0 )
und
i(z, t 0 ) =
1 h
u ( z − vt 0 ) .
ZL
Nach einer Zeitspanne Δt stellt sich auf der Leitung für die Spannung der Verlauf
u ( z , t 0 + Δt ) = u h ( z − v ⋅ (t 0 + Δt )) = u h (( z − Δ z ) − vt 0 ) = u ( z − Δ z, t 0 )
ein und entsprechend für den Strom der Verlauf
i ( z , t 0 + Δt ) =
1 h
1 h
u (z − v ⋅ (t 0 + Δt )) =
u ((z − Δ z ) − vt 0 ) = i ( z − Δ z , t 0 ) ,
ZL
ZL
wobei wir die Längendifferenz Δz = v⋅Δt eingeführt haben. Durch diese Umformung wird
deutlich, dass die Verteilung von Spannung und Strom längs der Leitung sich während der
Zeitspanne Δt lediglich um die Strecke Δz in +z-Richtung verschiebt, ansonsten aber
unverändert bleibt. Wir haben es demnach mit einer rein fortschreitenden Welle auf der
Leitung zu tun. Der Strom hat genau den gleichen Verlauf wie die Spannung; das Verhältnis
von Spannung und Strom ist in jedem Querschnitt der Leitung und zu jedem Zeitpunkt gleich
dem mit Gl. (3.3.21) eingeführten Wellenwiderstand ZL. Da es üblich ist, die z-Koordinate
von der gespeisten Seite der Leitung hin zum Verbraucher zu zählen, bezeichnet man diese
Teillösung als hinlaufende Welle, was die Wahl für den hochgestellten Index „h“ erklärt.
53
Die Verschiebung des Spannungs- und Stromverlaufs um den Betrag Δz geschieht in der Zeit
Δt, d. h. mit der Geschwindigkeit
Δz
=v=
Δt
1
=
L ′C ′
1
με
;
(3.3.38a)
sie ist mit Gl. (2.3.6) unabhängig von der Querschnittsform der Leitung, hängt nur von den
Eigenschaften des zwischen Innen- und Außenleiter liegenden Dielektrikums ab. Für eine
leere (luftgefüllte) Leitung ( μ r = 1 u. ε r = 1 ) ist sie gleich der Lichtgeschwindigkeit c0,
1
c0 =
μ 0ε 0
= 2.99792458 ⋅ 10 8 m/s ≈ 3 ⋅ 10 8 m s .
(3.3.38b)
Für eine Leitung mit einem Dielektrikum der Permittivitätszahl ε r (μr = 1) ist sie
v=
1
εr
c0 .
3.3.38c)
Die durch das Produkt u⋅i gegebene Leistung beschreibt einen Energietransport, der bei einem
Impuls aus dem Abbau der Energie an seiner Rückseite gespeist wird und dem Aufbau der
Energie an seiner Vorderseite dient.
Bei der Teillösung
u ( z , t ) = u r ( z + vt )
und
i(z, t ) = −
1 r
u ( z + vt )
ZL
verschieben sich Spannungs- und Stromverlauf in −z-Richtung; durch das ebenfalls umgekehrte Vorzeichen des Stromes kehrt sich auch die Richtung des Energieflusses um. Da sich
der Verlauf von Spannung und Strom in Richtung Leitungsanfang bewegt und auch die
Energie zurück zum Leitungsanfang fließt, spricht man bei dieser Teillösung von einer
rücklaufenden Welle, was die Wahl „r“ für den hochgestellten Index „r“ erklärt.
Am Rande sei bemerkt, dass die in Gl. (3.3.17) u. Gl. (3.3.18) eingeführten Integrationskonstanten U0 und I0, rein formal betrachtet, nicht erforderlich sind, da eine konstant
aufgeladene Leitung immer als Überlagerung zweier gegenläufiger Wellen interpretiert
werden kann; das gilt ebenso für eine von einem konstanten Strom durchflossene Leitung.
Eine geeignete Wahl der Integrationskonstanten U0 und I0 kann der physikalischen Anschauung jedoch in vielen Fällen entgegenkommen, dies allerdings um den Preis einer eindeutigen
Darstellung der Lösung, wovon wir uns anhand der nachfolgenden Aufgaben noch überzeugen werden. Ferner lassen sich auch die unter Fall a gefundenen Lösungen als spezielle
Form der Gl. (3.3.36) und (3.3.37) auffassen.
Bei der Lösung unseres Problems sind wir von den Differentialgleichungen (3.3.1) und (3.3.2)
ausgegangen und mussten auch bei der Verwendung der Matrizendarstellung immer noch die
Differenzierbarkeit der Funktionen u(z, t) und i(z, t) voraussetzen. Um auch Spannungs- und
Stromverläufe mit Unstetigkeiten zu erfassen, nehmen wir im Folgenden an, dass der Verlauf
von Spannung und Strom längs der Leitung zum Zeitpunkt t = 0 einen Sprung aufweist. Da es
uns hier nur auf den Einfluss der Unstetigkeitsstelle ankommt, wählen wir einen abgesehen
54
von dieser Unstetigkeit konstanten Verlauf von Spannung und Strom. Zur Lösung der Zeitabhängigkeit gehen wir hier von der Integraldarstellung der Maxwellschen Gleichungen aus 4 .
Gegeben sei also zum Zeitpunkt t = 0 ein Spannungsverlauf mit einem Sprung an der Stelle
z = z0, ansonsten sei der Spannungsverlauf längs der Leitung konstant; wir stellen ihn durch
einen so genannten Einheitssprung ε dar,
u( z ) = U 1 ⋅ ε(− z + z 0 ) .
(3.3.39a)
Der entsprechende Stromverlauf sei
i(z ) = I 1 ⋅ ε(− z + z 0 ) ,
(3.3.39b)
wobei ε(z) der Einheitssprung ist, der durch
⎧ 0 für z < 0
ε(z ) = ⎨
⎩1 für z > 0
(3.3.39c)
definiert 5 wird. Die Funktionen beschreiben eine Leitung, die im Bereich z < z0 auf die
Spannung U1 aufgeladen ist und dort den Strom I1 führt; für z > z0 ist sowohl die Spannung als
auch der Strom gleich Null. Wir wenden nun das Induktionsgesetz auf eine zwischen den
Ebenen z = z1 und z = z2 aufgespannte Fläche Av an, so wie wir sie in Abschnitt 3.1 definiert
haben, und erhalten sinngemäß zu Gl. (3.1.2)
2
∂ Ψ ′( z , t )
d 2
′
(
)
Ψ
=
u ( z1 ) − u ( z 2 ) =
z
,
t
d
z
dz.
∫
∫
∂t
d t z1
z1
z
z
(3.3.40)
Entsprechend erhalten wir sinngemäß zu Gl. (3.1.5)
2
∂Q ′( z , t )
d 2
′
(
)
i ( z1 ) − i ( z 2 ) =
Q
z
,
t
d
z
dz.
=
∫
∫
∂t
d t z1
z1
z
z
(3.3.41)
Liegen die Integrationsgrenzen z1 und z2 in dem Bereich
z1 < z 2 < z 0
oder in dem Bereich,
z 0 < z1 < z 2 ,
liegt die Sprungstelle außerhalb des Integrationsbereiches. In diesem Falle ist die Differenz
der Spannungen in Gl. (3.3.40) gleich Null. Da dies für alle Wertepaare der Integrationsgrenzen z1 und z2 in den vorgegebenen Bereichen gilt, ist der Integrand auf der rechten Seite
der Gleichung für alle im Integrationsbereich liegenden Werte von z gleich Null, d. h. es gilt
∂Ψ ′
∂i
= L′ ⋅ = 0 ;
∂t
∂t
4
Haben Spannung und Strom eine Unstetigkeitsstelle bei einem stetigen, aber ansonsten beliebigen Verlauf,
kann man dank der Linearität der Gleichungen das Superpositionsgesetz anwenden und die hier besprochene
Verteilung von der gegebenen Verteilung abziehen; dann bleibt ein stetiger Verlauf von Spannung und Strom
übrig.
5
Die Unstetigkeitsstelle z0 selbst haben wir hier außer Acht gelassen; man müsste sie einer strengeren mathematischen Untersuchung unterziehen, was wir jedoch übergehen wollen.
55
der Strom ist demzufolge in den oben angegebenen Bereichen zeitlich konstant. Das entsprechende folgt aus Gl. (3.3.41) für den Ladungsbelag und damit für die ihm proportionale
Spannung.
Wenden wir nun das Induktionsgesetz Gl. (3.3.40) auf einen Bereich
z1 < z 0 < z 2
an und legen damit die Sprungstelle bei z = z0 in den Integrationsbereich, dann wird sich nach
der oben gemachten Feststellung der längenbezogene magnetische Fluss Ψ ′ im einfachsten
Fall nur dadurch ändern können, dass sich die Sprungstelle z0 längs der Leitung verschiebt.
Unter dieser Annahme erhalten wir mit u(z1) = U1 und u(z2) = 0 und festen Integrationsgrenzen z1 und z2
z
d 2
d
U1 =
Ψ ′d z =
∫
dt z
dt
1
z0
d
∫ L ′I 1 d z =L ′ ⋅ I1 d t (z 0 − z1 ) = L ′ ⋅ I1
z1
d z0
dt
(3.3.42)
Mit entsprechenden Überlegungen folgt aus Gl. (3.3.41)
z
z
dz
d 2
d 0
d
′
( z 0 − z1 ) = C ′ ⋅ U 1 0 ,
d
I1 =
Q
z
C ′U 1 d z = C ′ ⋅ U 1
=
∫
∫
dt z
dt z
dt
dt
1
(3.3.43)
1
wobei wir angenommen haben, dass sich die Sprungstelle des Stromes und die der Spannung
mit gleicher Geschwindigkeit und in gleicher Richtung verschieben. Aus der Forderung, dass
die Ableitung von z0 nach der Zeit t in den beiden Gleichungen (3.3.42) und (3.3.43) gleich
ist, folgt, dass das Verhältnis von U1 zu I1 dem Betrage nach gleich dem Wellenwiderstand
der Leitung sein muss,
U1
L′
= ZL .
=
I1
C′
Hieraus folgt weiter, dass die Geschwindigkeit
der Leitung verschiebt, den Wert
v=
d ⁄d , mit der sich die Sprungstelle auf
1
L ′C ′
annimmt. Dies ist der gleiche Wert, den wir auch für die Verschiebung eines stetigen Verlaufs
von Spannung und Strom gefunden haben. Ist das Verhältnis U1/I1 positiv, ist auch die Geschwindigkeit v positiv, ist er negativ, gilt dies auch für v . Damit können wir zusammenfassend feststellen: Ändern sich Spannung und Strom an einer Sprungstelle in gleicher
Richtung, d. h. werden beide Größen größer oder werden beide Größen kleiner, bewegt sich
die Sprungstelle in +z-Richtung; es handelt sich um eine hinlaufende Welle, von der die
Leitung aufgeladen wird; dabei sorgt die positive Leistung dafür, dass die zur Aufladung der
Leitung benötigte Energie an die sich verschiebende Sprungstelle transportiert wird. Haben
die Änderungen von Spannung und Strom unterschiedliche Vorzeichen, bewegt sich die
Sprungstelle in −z-Richtung; es handelt sich um eine rücklaufende Welle, die die Leitung in
diesem Fall entlädt, was auch durch die negative, d. h. in −z-Richtung fließende Leistung zum
Ausdruck kommt. Man bezeichnet die zeitliche Verschiebung der Sprungstelle von Spannung
und Strom gelegentlich auch als Sprungwelle.
Ist das Verhältnis von Spannung zu Strom nicht gleich dem Wellenwiderstand der Leitung,
wie wir dies oben fordern mussten, dann müssen sich Spannung und Strom im Bereich der
56
Sprungstelle offenbar in anderer, komplizierterer Weise ändern, als wir dies für die einfach
fortschreitende Welle gefunden haben. Als Lösungsansatz für eine zum Zeitpunkt t = 0
gegebene Verteilung von Spannung und Strom nach den Gl. (3.3.39a) bis Gl. (3.3.39c), bei
·
gilt, verwenden wir die Überlagerung zweier gegenläufiger
der jedoch
Sprungwellen. Um die Darstellung einfacher zu gestalten, verlegen wir die Sprungstelle von
Spannung und Strom hierbei auf den Nullpunkt der z-Achse (z0 = 0). Für die Spannung lautet
der Lösungsansatz damit
u ( z , t ) = u h ( z − vt ) + u r ( z + vt )
(3.3.44)
und für den Strom
i(z, t ) =
(
)
1 h
u ( z − vt ) − u r ( z + vt ) .
ZL
(3.3.45
Zum Zeitpunkt t = 0 gilt dann für die Spannung
u ( z,0) = U 1 ⋅ ε(− z ) = u h ( z ) + u r ( z )
und für den Strom
Z L ⋅ i(z ,0) = Z L ⋅ I 1 ⋅ ε(− z ) = u h ( z ) − u r ( z ) .
Daraus ergibt sich für die Spannung der hinlaufenden Welle zum Zeitpunkt t = 0
u h (z ) =
1
(U 1 + Z L ⋅ I 1 ) ⋅ ε(− z )
2
und für die der rücklaufenden Welle
u r (z ) =
1
(U 1 − Z L ⋅ I 1 ) ⋅ ε(− z ) .
2
Um daraus den Verlauf der Spannung uh für Zeiten t > 0 zu ermitteln, müssen wir die
Koordinate z durch (z − vt) ersetzen, denn nur in dieser Form hängt uh voraussetzungsgemäß
von z und t ab. Bei ur ist die Koordinate z entsprechend durch (z + vt) zu ersetzen. Damit
ergibt sich für den zeitlichen Verlauf von uh die Gleichung
u h (z − vt ) =
1
(U 1 + Z L ⋅ I 1 ) ⋅ ε(− (z − vt ))
2
und für den Verlauf von ur
u r ( z + vt ) =
1
(U 1 − Z L ⋅ I 1 ) ⋅ ε(− (z + vt )) .
2
Die Verteilung der Gesamtspannung und die des Gesamtstromes erhalten wir als Überlagerung der beiden Teilwellen zu
u(z, t ) =
=
und
1
{(U 1 + Z L I 1 ) ⋅ ε(− z + vt ) + (U 1 − Z L I 1 ) ⋅ ε(− z − vt )}
2
U1
Z I
{ε(− z + vt ) + ε(− z − vt )} + L 1 {ε(− z + vt ) − ε(− z − vt )}
2
2
(3.3.46)
57
i(z, t ) =
⎫
⎛
U1 ⎞
U ⎞
1 ⎧⎛
⎟⎟ ⋅ ε(− z + vt ) + ⎜⎜ I 1 − 1 ⎟⎟ ⋅ ε (− z − vt )⎬
⎨⎜⎜ I 1 +
2 ⎩⎝
ZL ⎠
ZL ⎠
⎝
⎭
=
I1
U
{ε(− z + vt ) + ε(− z − vt )} + 1 {ε(− z + vt ) − ε(− z − vt )}.
2
2Z L
(3.3.47)
Abschließend nehmen wir an, dass zum Zeitnullpunkt Spannung und Strom auf beiden Seiten
der z-Achse von Null verschiedene Werte annehmen, d. h. es gelte für t = 0 für die
Spannungsverteilung auf der Leitung
⎧U für z < 0
u ( z ,0 ) = U 1 ⋅ ε (− z ) + U 2 ⋅ ε ( z ) = ⎨ 1
⎩U 2 für z > 0
und für die Verteilung des Stromes
⎧ I für z < 0
.
i ( z ,0 ) = I 1 ⋅ ε (− z ) + I 2 ⋅ ε ( z ) = ⎨ 1
⎩ I 2 für z > 0
Für die Lösung dieses Problems wählen wir drei unterschiedliche Ansätze, mit denen wir
zeigen, dass eine zusätzliche Gleichspannung und ein zusätzlicher Gleichstrom für die Lösung
des Problems nicht unbedingt angenommen werden müssen, dass sie jedoch die Anschauung
stützen können und dass die Wahl der Gleichgrößen einer gewissen Willkür unterliegt. Bei
dem ersten Lösungsansatz (I) gehen wir wieder von zwei gegenläufigen Wellen ohne
zusätzliche Gleichgrößen aus. Bei den beiden anderen Lösungsansätzen (II) u. (III) setzen wir
eine zusätzliche Gleichspannung und einen zusätzlichen Gleichstrom an.
Lösungsansatz (I)
Für die Spannung wählen wir in diesem Fall die zum Zeitpunkt t = 0 geltende Darstellung
u ( z,0) = U 1 ⋅ ε(− z ) + U 2 ⋅ ε(z ) = u h ( z ) + u r ( z )
und für den Strom entsprechend die Darstellung
Z L i( z ,0) = Z L I 1 ⋅ ε(− z ) + Z L I 2 ⋅ ε(z ) = u h ( z ) − u r ( z ) .
Durch Addition der beiden Gleichungen können wir nach uh auflösen. Indem wir in uh für
Zeiten t > 0 die Koordinate z wieder durch das Argument (z − vt) ersetzen, gewinnen wir
die Spannung der hinlaufenden Welle für beliebige Zeiten zu
u h (z − vt ) =
1
(U 1 + Z L I 1 ) ⋅ ε(− z + vt ) + 1 (U 2 + Z L I 2 ) ⋅ ε(z − vt ) .
2
2
(3.3.48)
Bilden wir die entsprechende Differenz und ersetzen z durch (z + vt), erhalten wir die
Spannung der rücklaufenden Welle für Zeiten t > 0 zu
u r ( z + vt ) =
1
(U 1 − Z L I 1 ) ⋅ ε(− z − vt ) + 1 (U 2 − Z L I 2 ) ⋅ ε(z + vt ) .
2
2
Die Gesamtspannung ist damit
(3.3.49)
58
u (z, t ) =
1
(U 1 + Z L I 1 ) ⋅ ε(− z + vt ) + 1 (U 1 − Z L I 1 ) ⋅ ε(− z − vt )
2
2
+
1
(U 2 + Z L I 2 ) ⋅ ε(z − vt ) + 1 (U 2 − Z L I 2 ) ⋅ ε(z + vt )
2
2
(3.3.50)
und der Gesamtstrom
i(z, t ) =
U ⎞
U ⎞
1⎛
1⎛
⎜⎜ I 1 + 1 ⎟⎟ ⋅ ε (− z + vt ) + ⎜⎜ I 1 − 1 ⎟⎟ ⋅ ε (− z − vt )
ZL ⎠
ZL ⎠
2⎝
2⎝
+
U ⎞
U ⎞
1⎛
1⎛
⎜⎜ I 2 + 2 ⎟⎟ ⋅ ε (z − vt ) + ⎜⎜ I 2 − 2 ⎟⎟ ⋅ ε ( z + vt ) .
ZL ⎠
ZL ⎠
2⎝
2⎝
(3.3.51)
Bei dem Lösungsansatz (I) haben wir zwei Sprungwellen überlagert, für die vier Unbekannte
zu bestimmen waren und zwar die Werte für die Spannungen der hin- und der rücklaufenden
Welle und dies jeweils für die positive und für die negative z-Achse zum Zeitpunkt t = 0.
Dazu standen im Prinzip vier Gleichungen zur Verfügung und zwar die für die Spannung und
die für den Strom und das jeweils für die positive und für die negative z-Achse. In den nun zu
behandelnden Fällen kommen zu den Spannungen der Wellen noch zwei Größen hinzu, und
zwar die Gleichspannung und der Gleichstrom. Da aber auch hier nur vier Gleichungen für
die Bestimmung der Unbekannten zur Verfügung stehen, werden wir, da sich mit ihrer Hilfe
nur vier Konstanten ermitteln lassen, in einem Fall nur die auf die Sprungstelle zulaufenden
Wellen als Lösung ansetzen (Fall II) und einmal nur die von ihr ablaufenden Wellen (Fall III).
Lösungsansatz (II)
In diesem Fall nehmen wir außer den Gleichgrößen Sprungwellen an, die zum Zeitpunkt
t = 0 auf der negativen z-Achse nur für die hinlaufende Welle von Null verschiedene Werte
annehmen und auf der positiven z-Achse nur für die rücklaufende Welle. Mit dieser
Annahme lautet der Lösungsansatz für die Spannung
u ( z , t ) = U h ⋅ ε(− (z − vt )) + U r ⋅ ε( z + vt ) + U 0
(3.3.52)
und für den Strom
i(z, t ) =
(
)
1
U h ⋅ ε (− ( z − vt )) − U r ⋅ ε( z + vt ) + I 0 .
ZL
(3.3.53)
Aus dem gegebenen Spannungsverlauf zum Zeitpunkt t = 0 im Bereich z < 0 gewinnen wir
die Bedingung
u ( z ,0 ) = U 1 = U h + U 0
(3.3. 54a)
und aus dem Strom zum gleichen Zeitpunkt und im gleichen Leitungsabschnitt gewinnen
wir die Bedingung
Z L ⋅ i( z ,0 ) = Z L ⋅ I 1 = U h + Z L ⋅ I 0 .
(3.3.54b)
Für den Leitungsabschnitt z > 0 lauten die entsprechenden Bedingungen
u ( z ,0) = U 2 = U r + U 0
und
(3.3.54c)
59
Z L ⋅ i( z ,0) = Z L ⋅ I 2 = −U r + Z L ⋅ I 0 .
(3.3.54d)
Aus diesen vier Gleichungen ergeben sich die vier zu bestimmenden Größen U0, I0, Uh und
Ur zu
U0 =
1
((U 1 + U 2 ) − Z L (I 1 − I 2 )) ,
2
(3.3.55a)
I0 =
⎞
1⎛ 1
⎜⎜ −
(U 1 − U 2 ) + (I 1 + I 2 )⎟⎟ ,
2 ⎝ ZL
⎠
(3.3.55b)
Uh =
1
((U 1 − U 2 ) + Z L (I 1 − I 2 ))
2
(3.3.55c)
Ur =
1
(− (U 1 − U 2 ) + Z L (I 1 − I 2 )) .
2
(3.3.55d)
und
Die Gesamtspannung wird damit zu
u (z, t ) =
1
{(U 1 − U 2 ) + Z L (I 1 − I 2 )} ⋅ ε(− z + vt )
2
+
1
{− (U 1 − U 2 ) + Z L (I 1 − I 2 )} ⋅ ε(z + vt )
2
+
1
{(U 1 + U 2 ) − Z L (I 1 − I 2 )}
2
(3.3.56)
und der Gesamtstrom zu
i(z, t ) =
⎫
1⎧
1
(U 1 − U 2 )⎬ ⋅ ε(− z + vt )
⎨(I 1 − I 2 ) +
2⎩
ZL
⎭
+
⎫
1⎧
1
(U 1 − U 2 )⎬ ⋅ ε(z + vt )
⎨− ( I 1 − I 2 ) +
2⎩
ZL
⎭
+
⎫
1⎧
1
(U 1 − U 2 )⎬
⎨(I 1 + I 2 ) −
2⎩
ZL
⎭
(3.3.57)
Der konstante Anteil U0 der Spannungsverteilung wird bei dieser Darstellung der Lösung
durch die Summe der gegebenen Spannungen auf beiden Seiten der Leitung (d. h. durch
ihren arithmetischen Mittelwert) und durch die Differenz der gegebenen Ströme auf den
beiden Leitungsabschnitten bestimmt; die Höhe der Sprungwellen hängt ausschließlich von
den Differenzen der gegebenen Größen ab. Analoges gilt wegen des formal gleichen
Aufbaus der Gleichungen für die Verteilung des Stromes, d. h. der Einfluss von Spannung
und Strom sind hier gegenüber dem Einfluss bei der Spannungsverteilung vertauscht.
Lösungsansatz (III)
Bei diesem Lösungsansatz gehen wir neben den Gleichgrößen U0 und I0 von zwei Sprungwellen aus, bei denen die hinlaufende Welle zum Zeitpunkt t = 0 nur auf der positiven zAchse von Null verschiedene Werte annimmt und die rücklaufende Welle nur auf der
60
negativen z-Achse; das sind die Sprungwellen, die von der Leitungsmitte ablaufen. Die
Spannung setzen wir damit in der Form
u ( z , t ) = U h ⋅ ε( z − vt ) + U r ⋅ ε(− ( z + vt )) + U 0
(3.3.58)
an und den Strom entsprechend in der Form
i(z, t ) =
(
)
1
⋅ U h ⋅ ε( z − vt ) − U r ⋅ ε (− ( z + vt )) + I 0 .
ZL
(3.3.59)
Der Zustand zum Zeitpunkt t = 0 liefert wieder die Bedingungen zur Bestimmung der
Größen U0, I0, Uh und Ur; sie lauten für die Spannung im Leitungsabschnitt z < 0
u ( z,0) = U 1 = U r + U 0
(3.3.60a)
und für den Strom
Z L ⋅ i( z ,0) = Z L ⋅ I 1 = −U r + Z L ⋅ I 0 ;
(3.3.60b)
für den Leitungsabschnitt z > 0 gilt
u ( z ,0) = U 2 = U h + U 0
(3.3.60c)
für die Spannung und
Z L ⋅ i( z ,0) = Z L ⋅ I 2 = U h + Z L ⋅ I 0 .
(3.3.60d)
für den Strom. Lösen wir diese vier Gleichungen nach den vier zu bestimmenden Größen
U0, I0, Uh und Ur auf, erhalten wir
U0 =
1
((U 1 + U 2 ) + Z L (I 1 − I 2 )) ,
2
(3.3.61a)
I0 =
⎞
1⎛ 1
⎜⎜
(U 1 − U 2 ) + (I 1 + I 2 )⎟⎟ ,
2 ⎝ ZL
⎠
(3.3.61b)
Uh =
1
(− (U 1 − U 2 ) − Z L (I 1 − I 2 ))
2
(3.3.61c)
Ur =
1
((U 1 − U 2 ) − Z L (I 1 − I 2 )) .
2
(3.3.61d)
und
Die Verteilung der Gesamtspannung längs der Leitung wird damit zu
u(z, t ) =
1
{− (U 1 − U 2 ) − Z L (I 1 − I 2 )} ⋅ ε(z − vt )
2
+
1
{(U 1 − U 2 ) − Z L (I 1 − I 2 )} ⋅ ε(− z − vt )
2
+
1
{(U 1 + U 2 ) + Z L (I 1 − I 2 )}
2
und die Verteilung des Gesamtstromes zu
(3.3.62
61
i(z , t ) =
⎫
1⎧
1
(U 1 − U 2 )⎬ ⋅ ε(z − vt )
⎨− ( I 1 − I 2 ) −
2⎩
ZL
⎭
+
⎫
1⎧
1
(U 1 − U 2 )⎬ ⋅ ε(− z − vt )
⎨(I 1 − I 2 ) −
2⎩
ZL
⎭
+
⎫
1⎧
1
(U 1 − U 2 )⎬ .
⎨(I 1 + I 2 ) +
2⎩
ZL
⎭
(3.3.63)
Vergleichen wir die Darstellungen der Lösungen nach den Ansätzen (II) und (III) miteinander, erkennen wir, dass die Spannungen der hin- und rücklaufenden Welle jeweils
unterschiedliche Vorzeichen haben. Dadurch bedingt ist auch der Einfluss der anfänglich
gegebenen Stromverteilung auf den weiteren Spannungsverlauf und umgekehrt der Einfluss
der anfänglich gegebenen Spannungsverteilung auf den weiteren Stromverlauf mit einem
anderen Vorzeichen behaftet. Auch bei dem konstanten Anteil der Spannung, der von der
Stromdifferenz bestimmt wird, ist das Vorzeichen anders als bei dem zuvor behandelten
Ansatz (II). Entsprechendes gilt für den konstanten Anteil des Stromes.
Obwohl die Darstellungen der Lösungen bei den drei Ansätzen sich in wesentlichen Teilen
ähneln, sind sie doch im Detail voneinander verschieden. Die ermittelten Gesamtlösungen
selbst sind in allen drei Fällen natürlich einander gleich, wovon man sich z. B dadurch
überzeugen kann, dass man die zeitliche Abhängigkeit von Spannung und Strom für einen
bestimmten Ort z = z0 mit Hilfe aller drei Darstellungen ermittelt und graphisch darstellt oder
aber die Verteilung von Spannung und Strom längs der Leitung zu einem vorgegebenen
Zeitpunkt t = t0 ermittelt und graphisch darstellt.
Wurde die Verteilung von Spannung und Strom auf der Leitung zum Zeitpunkt t = 0 durch
einen Schaltvorgang an der Stelle z = 0 herbeigeführt, wird man die im Fall (III) dargestellte
Lösung als physikalisch angemessen empfinden; bei einer anderen Vorgeschichte ist auch
eine andere Auffassung denkbar.
62
Aufgabe 3.3:
3.3.1: Stellen Sie den Weg s, den eine Welle auf einer leeren (luftgefüllten) Leitung
in der Zeit t zurücklegt, als zugeschnittene Größengleichung dar. Beziehen Sie
die Zeit dabei auf Millisekunden, Mikrosekunden, Nanosekunden und Pikosekunden; wählen Sie für die Normierung des Weges eine jeweils dazu passende Längeneinheit. Veranschaulichen Sie sich die Größe der Lichtgeschwindigkeit anhand dieser Gleichungen und anhand Ihnen vertrauter Strecken.
3.3.2: Geben Sie den Wellenwiderstand ZL einer Leitung in Abhängigkeit von dem
Geometriefaktor gL und von der Dielektrizitätszahl εr des Dielektrikums der
Leitung an; dabei habe die Permittivitätszahl μr den Wert Eins. Ermitteln Sie
die Gleichung für den Wellenwiderstand einer Koaxialleitung mit dem Innendurchmesser des Außenleiters D und dem Durchmesser des Innenleiters d.
3.3.3: Zum Zeitpunkt t = 0 sei längs der Leitung der Spannungsverlauf
u( z ) = U1 ⋅ ε(− z )
und der Stromverlauf
i(z ) = 0
gegebenen; dabei ist ε(z) die so genannte Sprungfunktion nach Gl. (3.3.39c).
Berechnen und skizzieren Sie nach dem Vorbild der Lösungsansätze (I), (II)
und (III) die Teilspannungen und die Teilströme sowie den gesamten
Spannungs- und Stromverlauf längs der Leitung. Bilanzieren Sie die Energie
zum Zeitpunkt t = Δt für den Leitungsabschnitt −Δz…+Δz mit Δz = c0⋅Δt.
(Wählen Sie als Beispiel U1 = 4V und ZL = 50Ω, εr = 1 und Δt = 1ns.)
3.3.4: Skizzieren Sie den durch Gl. (3.3.11) und (3.3.12) beschriebenen Spannungsund Stromverlauf für t1 = 0, T1 = 1ns, U0 = 6V, ZL = 50Ω, εr = 1 und μr = 1.
Stellen Sie den Vorgang als Überlagerung zweier Wellen dar und berechnen
Sie die Spannungen uh und ur der Teilwellen. Überzeugen Sie sich davon, dass
die Argumente der Teilspannungen die Form (z – c0t) und (z + c0t) haben.
63
Lösung von Aufgabe 3.3
3.3.1:
⎛ t ⎞
⎛ s ⎞
⎟;
⎟ = 300 ⋅ ⎜
⎜
⎝ ms ⎠
⎝ km ⎠
⎛ t ⎞
⎛ s⎞
⎜ ⎟ = 300 ⋅ ⎜⎜ ⎟⎟ ;
⎝m⎠
⎝ μs ⎠
⎛ t ⎞
⎛ s ⎞
⎟ = 30 ⋅ ⎜ ⎟
⎜
⎝ ns ⎠
⎝ cm ⎠
und
⎛ t ⎞
⎛ s ⎞
⎛ t ⎞
⎜
⎟ = 300 ⋅ ⎜ ⎟ = 0,3 ⋅ ⎜⎜ ⎟⎟ .
⎝ mm ⎠
⎝ ns ⎠
⎝ ps ⎠
3.3.2:
ZL =
1
εr
g L μ 0 c0 =
1
εr
g L ⋅ 120πΩ .
Speziell für die Koaxialleitung gilt
ZL =
⎛D⎞
⋅ 60 Ω⋅ ln⎜ ⎟ .
εr
⎝d⎠
1
3.3.3:
Lösung nach Ansatz (I):
Für die Spannung der hinlaufenden Welle gilt für t = 0
u h = f (z ) =
1
(u + Z L i ) = 1 U 1 ⋅ ε(− z ) .
2
2
Für t > 0 folgt daraus
1
u h = f (z − vt ) = U 1 ⋅ ε (− z + vt ) .
2
Für die Spannung der rücklaufenden Welle gilt für t = 0
u r = f (z ) =
1
(u − Z L i ) = 1 U 1 ⋅ ε(− z ) .
2
2
Daraus folgt für t > 0
1
u r = f ( z + vt ) = U 1 ⋅ ε (− z − vt ) .
2
Die Gesamtspannung ist damit
u (z , t ) = u h + u r
1
= U 1 ⋅ (ε(− z + vt ) + ε(− z − vt )) = 2 V⋅ (ε (− z + vt ) + ε (− z − vt ))
2
und der Gesamtstrom ist
(
)
i(z , t ) = u h − u r Z L
64
=
U1
⋅ (ε(− z + vt ) − ε(− z − vt )) = 40 mA⋅ (ε(− z + vt ) − ε(− z − vt )) .
2Z L
Lösung nach Ansatz (II):
Mit Gl. (3.3.56) ergibt sich
u (z, t ) =
U1
U
⋅ (ε(− z + vt ) − ε( z + vt )) + 1 = 2 V⋅ (ε(− z + vt ) − ε( zvt ) + 1)
2
2
und mit Gl. (3.3.57)
i(z, t ) =
U
U1
⋅ (ε(− z + vt ) + ε( z + vt )) − 1
2Z L
2Z L
= 40 mA⋅ (ε(− z + vt ) + ε(− z − vt ) − 1) .
Lösung nach Ansatz (III):
Mit Gl. (3.3.62) ergibt sich
u ( z, t ) =
U1
U
⋅ (− ε( z − vt ) + ε(− z − vt )) + 1 = 2 V⋅ (− ε( z − vt ) + ε(− z − vt ) + 1)
2
2
und mit Gl. (3.3.63)
i(z, t ) = −
U1
U
⋅ (ε( z − vt ) + ε (− z − vt )) + 1
2Z L
2Z L
= −40 mA⋅ (ε( z − vt ) + ε(− z − vt ) − 1) .
Die auf der Leitung im Bereich −Δz…+Δz gespeicherte Energie zum Zeitpunkt t = 0
ist
U 12
1 2
1 2 1
′
W = Wel = Δ z ⋅ U 1 ⋅ C = Δ z ⋅ U 1 ⋅
=
⋅ Δt = 160 pWs .
2
2
c0 Z L 2Z L
Für t = Δt gilt im gleichen Bereich −Δz…+Δz
W = Wel + W mag
mit
2(U 1 2)
1 ⎛U ⎞
Wel = 2Δz ⋅ ⎜ 1 ⎟ C ′ =
Δt = 80 pWs
2⎝ 2 ⎠
2Z L
2
2
und
Wmag
1⎛ U
= 2Δ z ⋅ ⎜⎜ 1
2 ⎝ 2Z L
Daraus folgt
2
⎞
1⎛ U
⎟⎟ L ′ = 2Δ z ⋅ ⎜⎜ 1
2 ⎝ 2Z L
⎠
⎞ Z L 2(U 1 2)2
⎟⎟ ⋅
=
Δt = 80 pWs .
2Z L
⎠ c0
2
65
W (0)−ΔzK+Δz = W (Δt )−ΔzK+Δz ;
die auf der Leitung gespeicherte Energie ist zu beiden Zeiten also gleich groß.
3.3.4:
u (z, t ) = U 0 ⋅
t
t
= 6 V⋅ .
ns
T1
Für den Strom ergibt sich mit C ′ =
i ( z, t ) = −C ′ ⋅
1
c0 Z L
U0
U
z
z
⋅z =− 0 ⋅
= −0,4 A⋅ .
T1
Z L c0T1
m
Die Spannungen der hin- und rücklaufenden Welle sind mit diesen Größen
uh =
1
(u + Z L i ) = −10 V⋅ ⎛⎜ z − 0,3 t ⎞⎟ ;
2
ns ⎠
⎝m
ur =
1
(u − Z L i ) = 10 V⋅ ⎛⎜ z + 0,3 t ⎞⎟ .
2
ns ⎠
⎝m
Das Argument der oben zunächst nur rein formal mit uh bezeichneten Spannung ist
1
m ⎞ 1 ⎛
t ⎞ 1 ⎛
⎛ z
9 m ⎞
t ⎟ = ⋅ (z − c0 t )
⎜ − 0,3 ⎟ = ⋅ ⎜ z − 0,3 t ⎟ = ⋅ ⎜ z − 0,3 ⋅ 10
ns ⎠ m ⎝
ns ⎠ m ⎝
s ⎠ m
⎝m
und das Argument von ur ist
m ⎞ 1
t ⎞ 1 ⎛
⎛ z
⎜ + 0,3 ⎟ = ⋅ ⎜ z + 0,3 t ⎟ = ⋅ ( z + c 0 t ) .
ns ⎠ m ⎝
ns ⎠ m
⎝m