Magnetfeld
Werbung

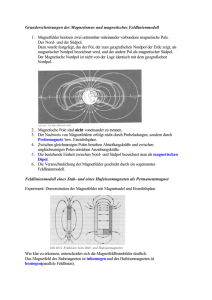
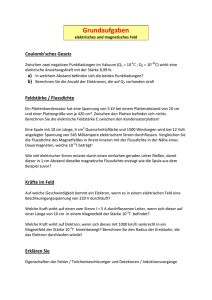
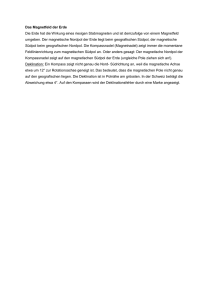
Magnetfeldsensoren Seminararbeit zum physikalischen Seminar für Informatiker Tobias Thesing Koblenz, Juni 2009 Universität Koblenz-Landau, Fachbereich Informatik Dozent: Dr. Merten Joost Inhaltsverzeichnis 1 Einführung 3 2 Hintergrund und Geschichte 3 Messgröÿe 4 3 4 5 6 3.1 Magnetische Flussdichte . . . . . . . . . . . . . . . . . . . . . . . 4 3.2 Magnetische Feldstärke . . . . . . . . . . . . . . . . . . . . . . . . 4 Physikalische Grundlagen Lorentzkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 4.2 Elektromagnetische Induktion . . . . . . . . . . . . . . . . . . . . 5 4.3 Hall-Eekt 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sensortypen und deren Messverfahren 6 5.1 Hall-Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 5.2 Magneto-resistiver Sensor (XMR) . . . . . . . . . . . . . . . . . . 7 5.2.1 Anisotropic Magnetoresistance (AMR) . . . . . . . . . . . 7 5.2.2 Giant Magnetoresistance (GMR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 5.3 SQUID 5.4 Protonen-Präzessions-Sensor . . . . . . . . . . . . . . . . . . . . . 9 5.5 Fluxgate-Sensor (Förster-Sonde) 9 . . . . . . . . . . . . . . . . . . Anwendungsgebiete 6.1 6.2 7 5 4.1 7 10 Direkte Anwendung . . . . . . . . . . . . . . . . . . . . . . . . . 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 6.1.1 Luftfahrt 6.1.2 Raumfahrt . . . . . . . . . . . . . . . . . . . . . . . . . . 10 6.1.3 Militär . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 6.1.4 Bodenschätze . . . . . . . . . . . . . . . . . . . . . . . . . 11 6.1.5 Archäologie . . . . . . . . . . . . . . . . . . . . . . . . . . 11 6.1.6 Industrie . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 6.1.7 Medizin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 6.1.8 Forschung . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Indirekte Anwendung . . . . . . . . . . . . . . . . . . . . . . . . . 11 6.2.1 Datenverarbeitung . . . . . . . . . . . . . . . . . . . . . . 12 6.2.2 Sensoren anderer Messgröÿen . . . . . . . . . . . . . . . . 12 6.2.3 Automobilindustrie . . . . . . . . . . . . . . . . . . . . . . 12 Fazit 12 1 Einführung Seit Anbeginn der Geschichte nimmt der Mensch die Welt, in der er lebt, mit seinen Sinnen wahr. Mit zunehmendem technischen Fortschritt stellte er sich jedoch vor Anforderungen, welche sich nicht mehr durch die menschliche Wahrnehmung allein erfüllen lieÿen. Fast überall werden heute exakte Angaben über Entfernungen, Geschwindigkeiten, Druck oder Temperaturen verlangt, für die moderne Messverfahren unabdingbar sind. Auch existieren in der Natur Kräfte, die der Mensch ohne technische Hilfe überhaupt nicht wahrnehmen kann. Zu diesen zählen vor allem magnetische Feldkräfte, die mit den richtigen Sensoren sehr einfach zu entdecken und zu messen sind. 2 Hintergrund und Geschichte Der Magnetismus war lange Zeit ein eher vernachlässigtes Gebiet der Physik. Erst gegen Endes des zwölften Jahrhunderts begannen die Menschen, dieses Phänomen für sich auszunutzen. Der Kompass war ein einfach gebautes, aber sehr eektives Instrument zur Orientierung auf hoher See. Er war mit Hilfe einer magnetempndlichen Nadel dazu in der Lage, die Ausrichtung des Erdmagnetfeldes zu erkennen, was Rückschlüsse auf die zur eigenen Position relative Lage von Nord- und Südpol erlaubte. Damit ist er eine Art primitiver Vorläufer der Magnetfeldsensoren, die in dieser Arbeit vorgestellt werden. 1832 gelang es dem Mathematiker und Physiker Karl Friedrich Gauÿ, das Magnetfeld der Erde nicht nur in seiner Ausrichtung, sondern auch in seiner Stärke zu messen und damit den Grundstein für die moderne magnetische Sensorik zu legen. Mit der mit Entdeckung und Nutzung der Elektrizität, zu der er in direkter Wechselwirkung steht, bekam der Magnetismus eine immer gröÿere Bedeutung. So spielt er beispielsweise auch in der Datenverarbeitung eine groÿe Rolle, denn viele Speichermedien sind noch immer magnetischer Natur. Daneben dienen Magnetfeldsensoren auch dazu, ferromagnetische Metalle aufzuspüren, was in den verschiedensten Gebieten von Nutzen ist. Da elektrische Spannung sich sehr einfach digital erfassen lässt, werden Magnetfelder auch in zahlreichen Sensoren für verschiedene andere Messwerte verwendet. Durch die Bestimmung der magnetischen Flussdichte lässt sich damit sehr einfach die eigentliche Messgröÿe, wie z. B. eine Rotationsgeschwindigkeit, errechnen. 3 3 Messgröÿe 3.1 Magnetische Flussdichte Die magnetische Flussdichte oder auch magnetische Induktion (Formelzeichen B) ist eine physikalische Gröÿe, welche die Menge der Magnetfeldlinien, die durch eine bestimmte Fläche treten, beschreibt. Wie viele andere Gröÿen kann sie auch als Vektor dargestellt werden, um die Richtung der Magnetfeldlinien anzugeben. Die magnetische Flussdichte wird mit der Einheit Tesla (T) gemessen, benannt nach dem Ernder Nikola Tesla. 1T = 1V s/m² = 1N/Am 1 Tesla übt auf einen von 1 Ampere Stromstärke durchossenen Leiter mit 1 Meter Länge eine Lorentzkraft von 1 Newton aus. Wie auch bei vielen anderen Messgröÿen gibt es je nach Anwendung weitreichendes Feld verschieden starker Magnetfelder, deren Flussdichten von einigen Femtotesla bis hin zu zweistelligen Tesla-Werten reichen. ca. 10−14 T bis 10−9 T ca. 30 ca. 0,1 µT bis 60 µT µT bis 2 mT ca. 1 mT bis 1,5 T biomagnetische Felder (Hirn- und Herzströme usw.) Erdmagnetfeld gemessen auf der Oberäche elektrische Haushaltsgeräte Hufeisenmagnete und Spezialmagnete (NdFeB/Neodym- Eisen-Bor) ca. 20 T bis 45 T hohe Magnetfelder für Experimente in Laboren (z. B. Teil- chenbeschleuniger) Stärkere Magnetfelder sind auf der Erde nicht in dauerhafter Form vorhanden, konnten aber unter anderem bei Neutronensternen festgestellt werden. Dort werden Flussdichten von bis zu 108 T erreicht. Früher wurde die Flussdichte mit der Einheit Gauÿ gemessen, wobei 1 Gauÿ 10−4 Tesla entsprach. 3.2 Magnetische Feldstärke Neben der Flussdichte gibt es auch die dazu proportionale magnetische Feldstärke (Formelzeichen H). Diese gibt wird in Ampere pro Meter angegeben und steht wie folgt mit der Flussdichte im Zusammenhang. B = µ0 · µr · H µ0 ist die magnetische Feldkonstante von 1, 26T m A. µr ist die Permeabilität des Materials, worin das µr -Wert für Luft liegt etwa bei 1. das Magnetfeld wirkt. Der Da die Beschaenheit der Materialien nicht ohne weiteres von Sensoren erfasst werden kann, wird für gewöhnlich jedoch nur die Flussdichte gemessen. 4 4 Physikalische Grundlagen In diesem Abschnitt werden die Prinzipien des Elektromagnetismus, auf denen die Arbeit der einfacheren Magnetfeldsensoren basiert, kurz zusammengefasst. 4.1 Lorentzkraft Bewegt sich eine elektrische Ladung durch ein Magnetfeld, so wird eine Kraft auf sie ausgeübt, welche den Stromuss ablenkt. Die Lorentzkraft steht sowohl zur Bewegungsrichtung als auch zum Magnetfeld senkrecht. → − → − − F = q · (→ v × B) Obwohl die Ladung im Gegensatz zu den anderen beteiligten Gröÿen kein Vektor ist, beeinusst deren Vorzeichen dabei die Richtung, in welche die Lorentzkraft ausübt wird. 4.2 Elektromagnetische Induktion Bewegt sich ein Leiter in ein Magnetfeld hinein oder aus einem Magnetfeld heraus, verschieben sich die Ladungen als Folge der Lorentzkraft, wodurch eine elektrische Spannung induziert wird. Üblicherweise verwendet man Spulen, um diesen Eekt um einen hohen Faktor (der abhängig von der Zahl der Windungen ist) zu verstärken. Die elektromagnetische Induktion wird in erster Linie zur Stromerzeugung verwendet, hat aber auch bei einigen Magnetfeldsensoren eine Bedeutung. 4.3 Hall-Eekt In einem festen elektrischen Leiter ist es nicht möglich, dass Elektronen durch die Lorentzkraft komplett abgelenkt werden. Stattdessen werden sie gezwungen, innerhalb des leitenden Materials wie möglich auf der entsprechenden Seite zu ieÿen, auf die sie von der Kraft bewegt werden. Dadurch entsteht auf dieser Seite des Leiters ein Überschuss an Elektronen, während ihre Anzahl auf der anderen Seite entsprechend abfällt. 5 Dies resultiert in einer zusätzlichen Spannung, welche senkrecht zum Stromuss und zum Magnetfeld steht. Die Hall-Spannung kann abgegrien und gemessen werden, ihre Gröÿe verhält sich proportional zur auslösenden magnetischen Flussdichte. UH = RH · I ·B d UH = Hall-Spannung RH = Hall-Konstante des Materials I = Stromstärke B = magnetische Flussdichte d= Dicke des Leiters bzw. Halbleiters 5 Sensortypen und deren Messverfahren 5.1 Hall-Sensor Wie der Name bereits vermuten lässt, macht der Hall-Sensor sich den Hall-Eekt zu nutze, um ein Magnetfeld zu erkennen und dessen Stärke zu bestimmen. Ein Hall-Sensor besteht in erster Linie aus den Elementen, die nötig sind, um wie weiter oben beschrieben mit Hilfe des Hall-Eektes eine magnetische Flussdichte zu messen. Da die Stromstärke, mit welcher der Sensor betrieben ist, bekannt ist, lässt sich mit Hilfe der aufgelösten Gleichung zur Hall-Spannung die magnetische Flussdichte errechnen. B= UH · d RH · I Der Messbereich von Hall-Sensoren liegt bei 0,5 µT bis 5 T. Vorteile: ? weder Sensor noch Magnetfeld müssen sich bewegen, um Messdaten zu empfangen ? einfacher Aufbau und geringe Herstellungskosten Nachteile: ? geringe Genauigkeit im Vergleich zu komplexeren Sensoren 6 Hall-Sensoren werden nicht nur zur Messung von Magnetfeldern, sondern indirekt auch zur Aufzeichnung von Drehbewegungen verwendet. Dadurch hat die Technik unter anderem in der Automobilindustrie eine hohe Bedeutung. 5.2 Magneto-resistiver Sensor (XMR) Der so genannte magneto-resistive Eekt tritt ebenfalls aufgrund der Lorentzkraft auf. Er bewirkt eine vorübergehende Vergröÿerung des elektrischen Widerstandes im Leiter, da die Ladung sich dank der Ableitung nicht mehr auf der kürzesten, geradlinigen Strecke durch den Leiter bewegt, sondern einen geringfügigen Umweg in Kauf nehmen muss. Die Auswirkungen auf den Widerstand sind bei gewöhnlichen leitenden Materialien wie Kupfer allerdings minimal. Um den Eekt für die Sensorik nutzen zu können, werden für die Feldplatten ganz spezielle Stoe wie z. B. Wismut verwendet, bei denen Widerstandsänderungen von über 100% möglich sind. Damit lassen sich Flussdichten zwischen 0,5 µT und 5 mT eektiv messen. Es existieren viele verschiedene Arten von XMR-Eekten, die beiden in Sensoren am häugsten verwendeten sind AMR (Anisotropic Magnetoresistance) und GMR (Giant Magnetoresisance). Daneben gibt es noch EMR (Extraordinary Mangetoresistance), BMR (Ballistic Magnetoresistance), TMR (Tunnel Magnetoresistance) und CMR (Colossal Magnetoresistance). 5.2.1 Anisotropic Magnetoresistance (AMR) Der anisotrope magnetoresistive Eekt tritt in ferromagnetischen Materialien auf und basiert auf der Polarisation ihrer Magnetisierung. Der Widerstand in einem derartigen Leiter ist bei einer Magnetisierung parallel zum Stromuss um eine Gröÿenordnung von einigen Prozent höher als bei einer Magnetisierung senkrecht zum Stromuss. Nimmt ein äuÿeres Magnetfeld nun Einuss auf die Magnetisierung des Metalls, so ändert sich der Widerstand und folglich auch der messbare Strom. Der Eekt wurde bereits 1857 entdeckt und ist daher schon sehr früh Grundlage für Sensoren gewesen. 5.2.2 Giant Magnetoresistance (GMR) Beim giganto-magnetoresistiven Eekt werden mindestens drei verschiedene Schichten im leitenden Metall vorausgesetzt. Dabei sind die äuÿeren beiden magnetisch, die mittlere zur Trennung nicht magnetisch. Werden mehr als drei Schichten verwendet, so wechseln sich magnetische und nicht-magnetische Schichten wiederkehrend ab. Sind die Metalle gegenläug magnetisiert, so ist der Widerstand deutlich gröÿer als wenn sie parallel magnetisiert sind. Die messbaren Unterschiede sind hierbei sehr groÿ und können bis zu 50% betragen, was dem Eekt auch seinen Namen verliehen hat. Er wurde jedoch erst 1988 entdeckt. 5.3 SQUID Das Superconducting Quantum Interference Device ist ein sehr empndlicher Sensor, der für die genaue Messung von kleinen Magnetfeldern vorgesehen ist. 7 Das Kernelement des SQUIDs ist ein Ring aus supraleitendem Material, der an einer oder zwei Stellen von nichtleitenden so genannten Josephson-Kontakten unterbrochen wird, die jedoch von den Ladungen getunnelt werden können. Das SQUID wird mit einem Gleichstrom betrieben, der dank den JosephsonKontakten in einer messbaren Spannung zwischen den beiden Hälften resultiert. Auf Basis der Quantenphysik kann der Ring nur von magnetischen Flüssen durchsetzt werden, die ganzzahlige Vielfache des elementaren magnetischen Flussquantums (2, 07 · 10−15 V s) ausmachen. Sobald sich das zu messende Ma- gnetfeld ändert, entsteht ein kleiner Strom, der dazu dient, den magnetischen Fluss auf entsprechende Werte zu erhöhen oder zu verringern. Dieser beeinusst die messbare Spannung zwischen den beiden Hälften des SQUIDs. Da die Kompensationsströme immer nur gerade so hoch werden, um den magnetischen Fluss auf das Niveau des nächstbesten Vielfachen eines Flussquantums, zeichnet sich ein stetig ansteigendes Magnetfeld in einer periodische Veränderung des Stromusses ab. Magnetfeldänderungen sollten also von der Gröÿenordnung her im Bereich des Flussquantums liegen, um sinnvolle Messungen durchführen zu können. Vorteile: ? höchste Genauigkeit, es können kleinste Magnetfelder (bis 1 fT) und minimale Schwankungen festgestellt werden Nachteile: ? die Supraleiter benötigen unnormal tiefe Temperaturen und müssen daher zur Anwendung in üssigem Sticksto oder sogar üssigem Helium gekühlt werden ? es werden keine absoluten Werte, sondern nur Änderungen des Magnetusses gemessen ? unbrauchbar für gröÿere Flussdichten 8 5.4 Protonen-Präzessions-Sensor Bei diesem Sensor ist ein nichtmagnetischer Behälter mit einer sehr protonenbzw. wasserstohaltigen Flüssigkeit, wie z. B. Wasser, von einer Spule umgeben. An diese wird ein starkes künstliches Magnetfeld angelegt, um den Kernspin auszurichten. Danach wird das Magnetfeld wieder deaktiviert, um eine Reaktion der Protonen auf das zu messende Magnetfeld zu ermöglichen. Da die Magnetfelder in der Regel nicht gleich ausgerichtet sind, gelangen die Protonen zur Präzession, wobei sich ihre Frequenz proportional zur zu messenden Flussdichte verhält. Vorteile: ? hohe Genauigkeit (bis 0,5 nT) Nachteile: ? Sensor muss alle paar Sekunden neu aufgezogen werden (d. h. der Kernspin wird neu ausgerichtet), da die Präzession mit der Zeit ausklingt ? geringfügige Trägheit bei der Messung aufgrund der Funktionsweise ? keine vektoriellen Ergebnisse, da nur die Frequenz der Präzession zur Messung dient 5.5 Fluxgate-Sensor (Förster-Sonde) Der Fluxgate-Sensor besitzt einen weichmagnetischen (also schnell magnetisierbaren) Kern, der von zwei verschiedenen Spulen umgeben ist. Über die primäre Spule wird der Kern zyklisch bis zur Sättigung magnetisiert. Dadurch induziert er in der sekundären Spule eine gleichmäÿige Wechselspannung. Ein äuÿeres Magnetfeld jedoch nimmt Einuss auf die Magnetisierung des Kerns und bewirkt eine Symmetrieverschiebung. Dies wirkt sich unmittelbar auf die induzierte Spannung in der Sekundärspule aus. 9 Die Grak zeigt beispielhaft die zyklische Magnetisierung des Kerns (durchgezogene Linie) sowie die Verschiebung bei Einwirkung eines äuÿeren Magnetfeldes (gestrichelte Linie). Die Messung ist stark von der Richtung der Feldlinien abhängig verwendet man mehrere senkrecht zueinander stehende Sensoren, so kann man ein vektorielles Messergebnis erzielen. Durch diese Eigenschaft sowie den hohen Messbereich von 10 pT bis 0,1 mT ist der Fluxgate-Sensor vielseitig einsetzbar, beispielsweise auch als sehr genauer elektronischer Kompass. 6 Anwendungsgebiete 6.1 Direkte Anwendung Bei folgenden Anwendungen wird ein äuÿeres Magnetfeld gemessen, um daraus Informationen zu erhalten. 6.1.1 Luftfahrt An Flughäfen dienen Magnetfeldsensoren zur genauen Erfassung der Flug- und Bodenfahrzeuge, um mögliche Risiken auszuschlieÿen und computerüberwachte Sicherheit zu gewährleisten. Die magnetische Auswirkung des hohen Metallgehaltes und der elektrischen Aggregate in den Maschinen ist zwar im Vergleich zum Erdmagnetfeld äuÿerst gering (0,1%), kann aber mit Sensoren erfasst werden. Die verschiedenen Signaturen der Messergebnisse werden dann in diesem 2004 gestarteten Projekt vom Computer den Flugzeugen und Fahrzeugen zugeordnet, um bei möglichen Kollisionen sofort eine Warnung auszugeben.[8] 6.1.2 Raumfahrt Magnetfeldsensoren eignen sich besonders gut, um die Lage von Satelliten zu bestimmen. Da es im All auch im magnetischen Bereich weniger Störfaktoren als auf der Erdoberäche gibt, ist dieses Verfahren sehr genau. 6.1.3 Militär An Militärugzeugen angebrachte Magnetfeldsensoren sind in der Lage, über kurze Distanzen Flugzeuge oder Raketenwaen zu erkennen und dabei die meisten Wettereinüsse sowie Tarntechnologien gegen andere Radarsysteme zu umgehen. Auÿerdem dienen die Sensoren zur frühzeitigen Aundung von aktuellen sowie von alten Land- und Seeminen. 10 6.1.4 Bodenschätze Unter der Erde gelagerte Eisenerze beeinussen das gemessene Erdmagnetfeld in ihrer näheren Umgebung. Auf diese Weise ist es mit entsprechenden Sensoren möglich, diese Vorkommen ohne den Aufwand einer Ausgrabung zu orten. 6.1.5 Archäologie Durch verschiedene Witterungseekte und kleinste magnetische Materialien ist der Oberboden normalerweise stärker magnetisiert als tiefer gelegener Boden. Wurde in früheren Zeiten der Menschheit irgendwo eine gröÿere Menge Erde ausgehoben und wurde diese Stelle später von der Natur wieder verschüttet, ist das durch Magnetfelder feststellbar. Zudem haben nicht nur Objekte aus Eisen, sondern auch Töpferwaren durch ihre enthaltenen Minerale einen magnetischen Eekt. 6.1.6 Industrie Magnetfeldsensoren werden oftmals zu Kontroll- und Qualitätssicherungszwecken eingesetzt. Beispielsweise können sehr einfach Metallteile gezählt und anhand der gemessenen Magnetfeldschwankungen auf die richtige Gröÿe überprüft werden. Mit Hilfe der so genannten Wirbelstromprüfung lassen sich durch Fluxgate-Sensoren auch nichtmagnetische Werkstoe untersuchen, indem Wirbelströme induziert werden, die sich bei Materialfehlern wie Rissen verändern. 6.1.7 Medizin Mit Hilfe von SQUIDs lassen sich Gehirn- und Herzströme messen. Die Verfahren der Magnetoenzephalographie (MEG) und der Magnetokardiogramme (MKG) machen sich Magnetfelder, die durch die winzigen Ströme im menschlichen Körper entstehen, zu nutze. Das Verfahren einer Kernspintomographie ist auÿerdem sehr nahe mit der Messtechnik der Protonen-Präzessions-Sensoren verwandt. 6.1.8 Forschung Die aus diesem Anwendungsbereich gröÿte Rolle spielen Magnetfeldsensoren in der Robotik. Sie erlauben es, Roboter mit einem Sinn auszustatten, über den Menschen nicht verfügen, was nicht nur vielfältige Einsatzmöglichkeiten schat, sondern auch die Orientierung in bestimmten künstlichen oder natürlichen Umgebungen verbessern kann. 6.2 Indirekte Anwendung Hierbei wird kein natürliches Magnetfeld gemessen, sondern künstlich eines erzeugt, um ein einfach erkennbares und wenig störungsanfälliges Signal aufzustellen, das von Magnetfeldsonsoren empfangen werden kann. Die Möglichkeiten 11 dabei sind sehr vielfältig, so dass hier nur die wichtigsten Beispiele aufgeführt werden. 6.2.1 Datenverarbeitung Magnetische Datenträger sorgen für eine dauerhafte, aber trotzdem akzeptabel schnelle Speicherung gröÿerer Datenmengen. Noch heute werden Festplatten mit GMR-Sensoren ausgelesen. Die Messung erfolgt zwar nur binär, doch die extrem hohe Dichte erfordert empndliche und zuverlässige Sensoren. 6.2.2 Sensoren anderer Messgröÿen Die Wechselwirkung zwischen Elektrizität und Magnetismus macht Magnetfeldsonsoren sehr attraktiv, wenn es um die digitale Erfassung von Messgröÿen geht. Oft werden Magnetfelder ausgenutzt oder erzeugt, um indirekt andere physikalische Gröÿen zu messen. 6.2.3 Automobilindustrie In Fahrzeugen werden gerne Hall-Sensoren verwendet, um beispielsweise Drehzahlen zu messen. Im Vergleich zu anderen Methoden lassen sich die Magnetfeldsensoren trotz ihrer günstigen Herstellung kontaktlos betreiben und bringen deshalb kaum Verschleiÿ und Wartungskosten mit sich. 7 Fazit Magnetfeldsensoren haben eine gröÿere Bedeutung, als man zunächst vermuten mag. Obwohl der Magnetismus nicht zu den wichtigsten und einussreichsten physikalischen Kräften gehört, lassen sich in vielen Gebieten der Forschung und Industrie wertvolle Informationen aus seiner Messung ziehen - für gewöhnlich immer dann, wenn Metall oder elektrischer Stromuss im Spiel ist. Optische und kinetische Störungen haben keinen Einuss auf Magnetfeldsensoren, was einen ihrer Hauptvorteile gegenüber der Messung anderer Gröÿen ausmacht. Allerdings erfordern verschiedene Anwendungen auch verschiedene Sensortypen, um gute Messungen zu gewährleisten. Von trivialen Hall-Sensoren bis hin zu hoch komplexen SQUIDs nden alle Arten ihre Anwendung in der Praxis. Wer jedoch einen Magnetfeldsensor einsetzen will, muss vorher genau wissen, was er sucht, ansonsten kann er mit den erhaltenen Messwerten wenig anfangen. 12 Literatur [1] Wikipedia (Stichworte: Magnetometer, Tesla (Einheit), Lorentzkraft, SQUID, Protonenmagnetometer, AMR-Eekt, GMR-Eekt) - //de.wikipedia.org/ [2] Laborpraktikum http: [28.06.2009] Sensorik, Universität Magdeburg - http://www.uni-magdeburg.de/imos/mea_sen/training/ Praktikumsanleitungen/S10_Magnetfeldsensoren.pdf [28.06.2009] [3] Magnetische - Eekte: Magnetfeldsensoren, Fachhochschule Jena http://www.fh-jena.de/~ploss/LEHRE/PDF/SENSOR_4.PDF [28.06.2009] [4] MR-Sensoren, Grundlagen - Grundlagen1.htm http://www.mr-sensor.de/SitesGer/ [28.06.2009] http://www.iwf.oeaw.ac.at/de/ forschung/sonnensystem/planeten/venus/venus-express/ vex-mag/fluxgate-magnetometer.html [28.06.2009] [5] Fluxgate-Magnetometer [6] Sensoren [7] Hall für die Prozeÿund Umwelttechnik http: //www.e-technik.fh-lausitz.de/~estein/eprofpubli/1995f/ vde96.PDF [28.06.2009] Eekt - http://www.elsenbruch.info/ph12_hall.htm [28.06.2009] [8] [Grak-1] Magnetfeldsensoren sollen Flughäfen sicher machen - uni-protokolle.de/nachrichten/id/30775/ http://www. [28.06.2009] http://upload.wikimedia.org/wikipedia/commons/thumb/f/ fd/Lorentzkraft_v2.svg/800px-Lorentzkraft_v2.svg.png [Grak-2] http://www.elsenbruch.info/ph12_down/wpe10916.gif [Grak-3] http://upload.wikimedia.org/wikipedia/de/e/e2/SQUID.png [Grak-4] [Grak-5] http://www.earthsci.unimelb.edu.au/ES304/MODULES/MAG/ NOTES/NOTESimg/fluxgate.gif http://www.e-technik.fh-lausitz.de/~estein/eprofpubli/ 1995f/vde96.PDF