Modalanalyse am Zweimassenschwinger
Werbung

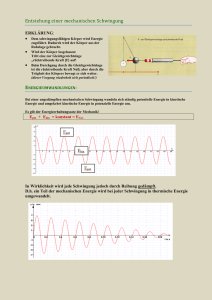
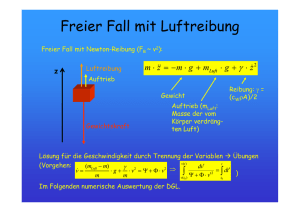
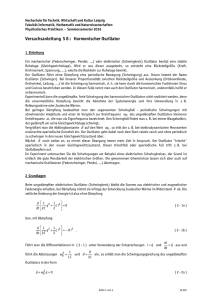
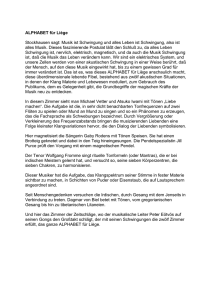
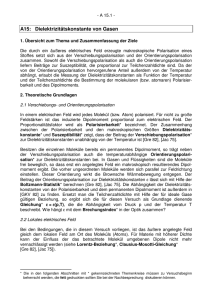
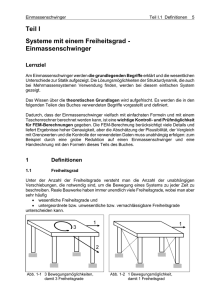
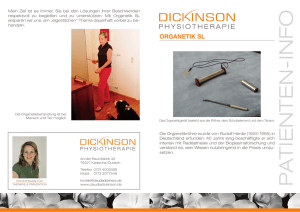
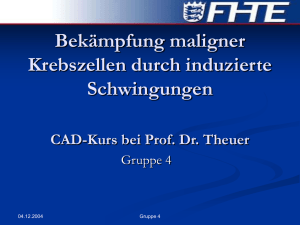
T e c h n is c h e U n iv e r s itä t B e r lin F a k u lt ä t I I I I n s t it u t f ü r P r o z e s s - u n d A n la g e n t e c h n ik M MR RT T P r o f . D r .- In g . R . K in g F a c h g e b ie t M e s s - u n d R e g e lu n g s te c h n ik TU Berlin · Sekretariat P2-1 · Mess- und Regelungstechnik Hardenbergstraße 36a · 10623 Berlin phone: ++49–30–314.24100 — fax: .21129 Modalanalyse am Zweimassenschwinger Dipl.-Ing. Gregor Gelbert E-Mail: [email protected] Internetseite: http://mrt.tu-berlin.de 16. April 2007 Inhaltsverzeichnis 1 Einleitung 2 2 Mechanisches Modell des Einmassenschwingers 2.1 freie ungedämpfte Schwingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 freie gedämpfte Schwingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Experimentelle Bestimmung der Eigenfrequenz und des Dämpfungsgrades . . . . 2 2 3 4 3 Mechanisches Modell des Zweimassenschwingers 5 4 Vorarbeiten und Versuchsdurchführung 4.1 Hausaufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Protokoll . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 8 8 9 x k x FF Abbildung 1: Einmassenschwinger ohne Dämpfung in ausgelängter Lage 1 Einleitung Der longitudinale Ein-, Zwei- bzw. Dreimassenschwinger ist vielen Studenten aus Grundvorlesungen zur Mechanik, Mathematik oder Physik bekannt. Falls nicht- keine Angst, die theoretischen Grundlagen werden in diesem Skript in Abschnitt 2 und 3 behandelt. Die theoretischen Kenntnisse sollen in der messtechnischen Übung am realen Zweimassenschwingers in praktische Erfahrungen umgesetzt werden. In einer Systemidentifikation sollen dabei zunächst die wichtigsten Parameter des Systems (Massen, Federsteifigkeiten und Dämpfungen) bestimmt werden. Ist das System identifiziert, sollen die Eigenfrequenzen und die Eigenformen das Zweimassenschwingers zunächst berechnet und dann experimentell überprüft werden. Ziel der Übung ist es unter Anderem die Begriffe Systemidentifikation, Eigen- bzw. Resonanzfrequenz und Eigenform bzw. Eigenvektor mit praktischem Inhalt zu füllen. 2 2.1 Mechanisches Modell des Einmassenschwingers freie ungedämpfte Schwingung Wir betrachten zunächst den Einmassenschwinger ohne Dämpfung in ausgelängter Lage (Abb. 1). Um die Bewegungsgleichung aufzustellen, wird der Schwinger von seiner Umgebung freigeschnitten, wodurch die Federkraft FF = k · x sichtbar wird. Diese ist entgegen der Auslenkung x gerichtet und proportional zur Federsteifigkeit k. Aus dem zweiten Newtonschen Axiom (Summe aller Kräfte ist gleich Masse mal Beschleunigung; auch Impulssatz genannt) ergibt sich für die betrachtete eindimensionale Bewegung in x-Richtung: mẍ = −FF k ẍ + x = 0 . m bzw. (1) (2) Zur Lösung dieser homogenen Differentialgleichung zweiter Ordnung verwenden wir hier einen Exponentialansatz: x(t) = Aeλt . (3) Einsetzen des gewählten Ansatzes in Gleichung (2) ergibt: k λ2 Aeλt + Aeλt m k 2 Aeλt λ + m = 0 bzw. (4) = 0 . (5) Da die letzte Gleichung zu allen Zeiten t gültig sein soll, ergibt sich aus (5) zum einen die triviale Lösung A = 0 (statische Ruhelage, keine Bewegung) und zum anderen die charakteris2 x k r x FF Fd Abbildung 2: Einmassenschwinger mit Dämpfung in ausgelängter Lage tischen Gleichung bzw. Eigenwertgleichung: λ2 + k =0. m (6) Für den Eigenwert λ erhält manqaus der charakteristischen Gleichung (6) die zwei Lösungen q k k λ1,2 = ±i m . Für den Wert m wird die Abkürzung ω0 eingeführt, deren physikalische Bedeutung weiter unter klar werden wird. Somit ergibt sich als Lösung der homogenen Differentialgleichung (2): x(t) = A1 e+iω0 t + A2 e−iω0 t = A1 (cos(ω0 t) + i sin(ω0 t)) + A2 (cos(ω0 t) − i sin(ω0 t)) (7) (8) = (9) (A1 + A2 ) cos(ω0 t) + i(A1 − A2 ) sin(ω0 t) Für die Umformung von (7) nach (8) wurde die Eulersche Formel benutzt. Da sowohl Imaginärals auch Realteil von (9) eine Lösung von (2) darstellen und für die vollständige Lösung einer homogenen Differentialgleichung zweiter Ordnung zwei linear unabhänige Lösungen benötigt werden, erhält man als vollständige, reelle Lösung von (2): x(t) = A∗1 cos(ω0 t) + A∗2 sin(ω0 t) , (10) x(t) = x̂cos(ω0 t + φ) . (11) bzw. nach Umformung Man erkennt nun, dass r k (12) m die Eigenkreisfrequenz des freien, ungedämpften Einmassenschwingers ist. Die Integrationskonstanten x̂ und φ (bzw. A∗1 und A∗2 ) müssen aus Anfangsbedingungen bestimmt werden. ω0 = 2.2 freie gedämpfte Schwingung Da jedes reale, schwingungsfähige System reibungsbehaftet ist, stellt der gedämpfte Schwinger eine Anwendung dar, die die Realität genauer abbildet als der ungedämpfte Schwinger. Schneidet man den gedämpften Einmassenschwinger von seiner Umgebung frei (siehe Abb. 2), werden zwei Kräfte sichtbar- die Federkraft FF = kx und die Dämpferkraft FD = rẋ. Die Dämpferkraft ist proportional zum Dämpfungsfaktor r und zur Geschwindigkeit ẋ. Diese Form der Dämpfung wird daher auch als lineare, geschwindigkeitsproportionale Dämpfung bezeichnet. Aus dem Impulssatz in x-Richtung ergibt sich: mẍ = −FF − FD r k ẍ + ẋ + x = 0 . m m 3 bzw. (13) (14) Verwendet man wieder den Lösungsansatz x(t) = Aeλt erhält man nach dem Einsetzten: k r Aeλt = 0 (15) λ2 + λ + m m Wieder erhält man neben der trivialen Lösung A = 0 die charakteristische Gleichung: r k λ2 + λ + = 0 m m und damit zwei Lösungen für den Eigenwert λ: r r 2 r k λ1,2 = − ± − 2m 2m m (16) (17) . q k , der Abklingkonstante Mit der Eigenkreisfrequenz des ungedämpften Schwingers ω0 = m r σ r σ = 2m und dem Dämpfungsgrad D = ω0 = 2mω0 ergeben sich folgende Darstellungen: λ1,2 q σ 2 − ω02 bzw. p = −ω0 D ± ω0 D2 − 1 . = −σ ± (18) (19) Wir betrachten hier nur den Fall der schwachen Dämpfung (D < 1), da sich nur für ihn eine quasiharmonische Schwingung (harmonische Schwingung mit abklingender Amplitude) ergibt. Man erhält aus Gl. 19: p (20) λ1,2 = −ω0 D ± iω0 1 − D2 bzw. mit der Abkürzung ωd = ω0 p 1 − D2 λ1,2 = −ω0 D ± iωd (21) , (22) . Weiter unten wird man sehen, das ωd die Eigenkreisfrequenz des gedämpften Schwingers darstellt. Setzt man nun die berechneten Eigenwerte 22 in den Lösungsansatz ein, erhält man: x(t) = A1 e−ω0 Dt eiωd t + A2 e−ω0 Dt e−iωd t (23) . Mit den gleichen Begründungen wie beim ungedämpften Schwinger in Abschnitt 2.1 (s.a. Gl. (7)-(7) ) erhält man als Lösung letztendlich: x(t) = e−ω0 Dt (A∗1 cos(ωd t) + A∗2 sin(ωd t)) , (24) bzw. nach Umformung x(t) = x̂e−ω0 Dt cos(ωd t + φ) . 2.3 (25) Experimentelle Bestimmung der Eigenfrequenz und des Dämpfungsgrades Abbildung 3 zeigt einen möglichen Zeitverlauf eines gedämpften Einmassenschwingers, der nach der Vorgabe einer bestimmten Anfangsbedingung sich selbst überlassen wurde (Ausschwingversuch). Zur Bestimmung der Eigenfrequenz misst man die Periodendauer Td der Schwingung. Um ein genaues Ergebnis zu erhalten, wird dabei über möglichst viele Perioden n gemittelt. Die Eigenfrequenz des gedämpften Schwingers berechnet sich dann aus: fd = n 1 ωd = = 2π Td tn − t1 4 . (26) 1 0.8 0.6 x1 x(t) 0.4 xn 0.2 0 t1 tn −0.2 −0.4 n=3 −0.6 −0.8 −1 0 2 4 6 8 10 12 t 14 16 18 20 Abbildung 3: Zeitverlauf eines gedämpften Schwingers x1 x2 k1 k2 m1 m2 x1 x2 FF1 m1 m2 FF2 Abbildung 4: Zweimassenschwinger ohne Dämpfung in ausgelängter Lage Der Dämpfungsgrad D läßt sich aus einer einfachen Betrachtung der Lösung (25) an den Stellten (t1 , x1 ) und (tn , xn ) bestimmen. Über das sog. logarithmische Dekrement erhält man: D= r 1 n ln xxn1 2 4π 2 + n1 ln xxn1 . (27) 2 Da der Term n1 ln xxn1 für Dämpfungsgrade kleiner 30 % (D < 0.3) sehr klein ist, ergibt sich in diesem Fall die Näherung: x1 1 1 ln . (28) D≈ n 2π xn 3 Mechanisches Modell des Zweimassenschwingers Abbildung 4 zeigt den Zweimassenschwinger ohne Dämpfung in ausgelängter Lage. Nach dem Freischnitt werden die Federkräfte an beiden Massen sichtbar und man erhält über den Impulssatz: m1 ẍ1 = −FF1 (29) m2 ẍ2 = FF1 − FF2 (30) 5 Mit FF1 = k1 (x1 − x2 ) und FF2 = k1 x2 erhält man: m1 ẍ1 + k1 x1 − k1 x2 m2 ẍ2 − k1 (x1 − x2 ) + k1 x2 = = (31) (32) 0 0 bzw. in Matrix-Vector Form: k1 −k1 m1 0 ẍ + x = 0 oder kurz −k1 k1 + k2 0 m2 | {z } {z } | M K Mẍ + Kx = 0 . (33) (34) Zur Lösung dieses homogenen Differentialgleichungssystems zweiter Ordnung verwenden wir erneut einen Exponentialansatz in der Form: x(t) = x̂eλt Einsetzten ergibt: (35) . λ2 M + K x̂eλt = 0 . (36) Andere Lösung als die triviale Lösung x̂ = 0 ergeben sich nur, wenn die Matrix λ2 M + K singulär wird. Es muss daher gelten: det λ2 M + K = 0 . (37) Die Berechnung der Determinante führt auf die charakteristische Gleichung: 2 λ m1 + k1 −k1 det = (λ2 m1 + k1 )(λ2 m2 + k1 + k2 ) − k12 = 0 −k1 λ2 m2 + k1 + k2 . (38) Ausmultiplizieren der charakteristischen Gleichung ergibt ein Polynom vierter Ordnung: λ4 + k1 k2 m1 (k1 + k2 ) + m2 k1 2 λ + m1 m2 m1 m2 (39) , dass sich mit der p-q Formel leicht lösen lässt: s 2 m1 (k1 + k2 ) + m2 k1 m (k + k ) + m k k1 k2 1 1 2 2 1 λ2± = − ± − 2m1 m2 2m1 m2 m1 m2 . (40) Sowohl λ2+ als auch λ2− sind negative Zahlen, so dass die Wurzeln aus Gl. (40) jeweils rein imaginäre Zahlen sind. Wie zuvor beim Einmassenschwinger, stellen diese Imaginärteile die Eigenkreisfrequenzen des Zweimassenschwingers dar. Für den Eigenwert λ ergeben sich damit vier Lösungen: q (41) λ1,2 = + λ2± = +i ω1,2 q λ3,4 = − λ2± = −i ω1,2 , (42) wobei sich die Eigenwerte λ1 und λ3 bzw. λ2 und λ4 , wieder analog zum Einmassenschwinger, nur im Vorzeichen unterscheiden. Durch einsetzten der gefundenen Eigenwerte in: 2 λ m1 + k1 −k1 (43) x̂ = 0 −k1 λ2 m2 + k1 + k2 6 erhält man zu jedem Eigenwert eine Lösung x̂, welche als Eigenvektor bezeichnet wird. Durch die Forderung einer zu Null werdenden Determinante in Gl. (37) sind beide Zeilen in (43) linear voneinander abhängig. Das heißt die Auswertung beider Zeilen bringt das gleiche Ergebins, bzw. der Eigenvektor x̂ kann nur bis auf einen Faktor α genau bestimmt werden. Mit x̂T = (x̂1 x̂2 ) erhält man durch ausmultiplizieren der z.B. ersten Zeile von (43): (λ2 m1 + k1 )x̂1 − k1 x̂2 = 0 (44) 2 1 +k1 ) . Durch einsetzen der beiden Eigenwerte λ1 und λ2 Mit x̂1 = α erhält man x̂2 = α (λ mk1 ergibt sich für die dazugehörigen Eigenvektoren: ! 1 x̂1 = α1 (λ21 m1 +k1 ) = α1 h1 (45) k1 x̂2 = α2 1 (λ22 m1 +k1 ) k1 ! = α2 h2 (46) Der Eigenvektor (auch Eigenform oder Mode genannt 1 ) gibt das Amplitudenverhältnis der schwingenden Massen zueinander an. Erhält man beispielsweise zum erstem Eigenwert einen Eigenvektor x̂T1 = α1 (0.5 1) bedeutet das, dass sich Masse zwei in Phase mit Masse eins und mit doppelt so großer Amplitude bewegt, wenn das System nur mit der ersten Eigenfrequenz ω1 schwingt. Erhält man zum zweiten Eigenwert einen Eigenvektor x̂T2 = α2 (1 − 1) heißt dass, beide Massen schwingen mit gleich großer Amplitude aber gegenphasig, im Falle einer Schwingung mit nur der zweiten Eigenfrequenz. Für die Eigenwerte λ3 und λ4 ergeben sich, mit anderen Vorfaktoren, die gleichen Eigenvektoren (x̂3 = α3 h1 ; x̂4 = α4 h2 ). Ganz analog zum Einmassenschwinger erhält man die Lösung der homogenen Gleichung 34 durch Superposition der einzelnen Lösungen: x(t) = α1 h1 eλ1 t + α2 h2 eλ2 t + α3 h1 eλ3 t + α4 h2 eλ4 t . (47) Mit den gleichen Begründungen wie beim Einmassenschwinger (s.a. Gl. (7)-(9))lässt sich diese Lösung über die Eulersche Formel und mit den Gleichungen (41) und (42) umformen zu: x(t) = A1 h1 cos(ω1 t + φ1 ) + A2 h2 cos(ω2 t + φ2 ) . (48) Jede Lösung des freien Zweimassenschwingers setzt sich also zusammen aus der Überlagerung einer Schwingung mit der ersten Eigenkreisfrequenz ω1 und der ersten Eigenform h1 und einer Schwingung mit der zweiten Eigenfrequenz ω2 und der zweiten Eigenform h2 . 4 Vorarbeiten und Versuchsdurchführung Abbildung 5 zeigt den Versuchsaufbau der für die messtechinschen Übungen zur Verfügung steht. Man erkennt drei kleine Wagen, auf denen sich verschiedene Massen montieren lassen. Der erste Wagen (links) ist über eine Zahnstange mit einem Motor verbunden, an den dritten Wagen ist ein Dämpfertopf angeschlossen. In dem hier durchgeführten Versuch wird der dritte Wagen jedoch fest fixiert sein und somit nicht an der Schwingung teilnehmen. Zwischen den Wagen lassen sich Federn mit unterschiedlicher Härte montieren. Jeder Wagen ist mit einem hoch sensiblem, optischem Impulsgeber verbunden, wodurch die genaue Position (durch Ableitung nach der Zeit auch die Geschwindigkeit und Beschleunigung) der Wagen gemessen werden kann. Die Messaufnehmer funktionieren genau nach dem Prinzip, dass Sie bei der digitalen Drehzahlmessung kennen gelernt haben. 1 Die Worte Eigenvektor, Eigenform und Mode werden gelegentlich synonym verwendet. Ein Eigenvektor (hier x̂ = αh ) ist genau genommen immer nur bis auf einen Faktor genau bestimmt. Das heißt, er hat eine Richtung (die Eigenrichtiung) aber keine definierte Länge. Von Eigenform oder Mode (hier h) spricht man hingegen, wenn der Eigenvektor auf irgendeine Art normiert worden ist und somit sowohl eine Richtung als auch eine Länge hat 7 Abbildung 5: Versuchsaufbau 4.1 Hausaufgaben Zur Vorbereitung des Versuches beantworten Sie bitte folgende Fragen: • Um wieviel Prozent kleiner ist die Eigenfrequenz des gedämpften Schwingers im Verhältnis zu der des ungedämpften Schwinger bei einem Dämpfungsgad von 10 % (D = 0.1) und sonst gleichen Parametern? • Bis zu welchem Dämpfungsgrad D unterscheidet sich die Eigenfrequenz des gedämpften Schwingers um weniger als 5 % von der des ungedämpften Schwingers? • Bei einem ungedämpften Einmassenschwinger sind die Federkonstante k und die Masse mx unbekannt. Sie haben aber die Möglichkeit eine zusätzliche, bekannte Masse mb anzubringen. Wie lassen über die Eigenkreisfrequenz in zwei Ausschwingversuchen die Parameter k und mx bestimmen? 4.2 Versuchsdurchführung Zunächst sollen die Massen, Federsteifigkeiten und Dämpfungen des Systems bestimmt werden. Durch das Anbringen zusätzlicher Fesselungen kann aus dem Zweimassensystem leicht ein Einmassenschwinger gemacht werden. Dazu stehen Ihnen zwei Muttern M8 und ein Inbusschlüssel zur Verfügung. Fixieren Sie zunächst Wagen zwei. • Beladen Sie Wagen eins mit vier der dickeren Messingplatten (a 500g) und führen Sie einen Ausschwingversuch durch. Der Tutor wird Ihnen dabei behilflich sein und Ihnen zeigen, wie mit Hilfe des Programmes EDny32 die Position des Wagens über der Zeit aufgenommen und dargestellt werden kann. Speichern Sie die aufgenommenen Daten ab. • Bestimmen Sie die Dämpfung und Eigenfrequenz wie in Abschnitt 2.3 angegeben. Muss die Dämpfung an Masse eins im Folgenden berücksichtigt oder kann sie vernachlässigt werden? • Entfernen Sie nun die Messingplatten und führen Sie einen zweiten Ausschwingversuch durch. Berechnen Sie erneut die Eigenfrequenz und bestimmen Sie die unbekannte Masse mx1 und die Federsteifigkeit k1 so wie Sie es sich in der Hausaufgabe überlegt haben. 8 • Sehen Sie sich den Versuchsaufbau nocheinmal genau an. Was haben Sie mit der Masse mx1 eigentlich bestimmt? • Wiederholen Sie die oberen vier Schritte für Wagen zwei (d.h. Wagen eins fixieren) und bestimmen Sie mx2 und k2 . Die aufgenommenen Daten können, müssen dabei aber nicht gespeichert werden. Mit den oberen Schritten haben Sie eine einfache Systemidentifikation durchgeführt. Sie haben das reale System auf ein analytisches Modell (den gedämpften Schwinger) abgebildet und alle dazugehörigen Parameter bestimmt. Die Betrachtung der Dämpfung hat des Weiteren deutlich gemacht, das im Folgenden mit einem noch einfacherem Modell, dem ungedämpften Schwinger weiter gearbeitet werden kann. • Um ein Gefühl für die geschwindigkeitsproportionale Dämpfung zu bekommen, lösen Sie bitte die Verschraubung des Dämpfertopfes mit Masse drei und bewegen die Kolbenstange des Dämpfer von Hand nach links und rechts. Achten Sie darauf wie die Dämpferkraft von der Bewegungsgeschwindigkeit der Kolbenstange abhängt. Wir werden das System nun mit einer Kraft an Masse eins zum schwingen anregen (erzwunge Schwingung) und es durch die Resonazfrequenzen fahren. Als Resonanzfrequenz eines Systems bezeichnet man solche Frequenzen, bei denen unter Beibehaltung der Anregungsamplitude die Amplitude der Systemschwingung ein lokales Maximum hat. Die Resonazfrequenzen des gedämpften Schwingers entsprechen genau genommen nicht exakt seinen Eigenfrequenzen. Für den Einmassenschwinger gilt beispielsweise: p (49) wres = ω0 1 − 2D2 (vergl. mit Gl (21) ) . Für kleine Dämpfungen liegen Eigenfrequenz ωd und Resonanzfrequenz ωres jedoch sehr dicht zusammen, für den theoretische Fall D = 0 sind sie exakt gleich (ωres = ω0 ). • Entfernen Sie die Fixierungen, so dass Wagen eins und zwei frei beweglich sind. Beladen Sie Wagen eins mit einem Kilogramm und Wagen zwei mit zwei Kilogramm Gewicht. Berechnen Sie die Eigenfrequenzen und Eigenformen des Zweimassenschwingers wie in Abschnitt 3 angegeben. • Überprüfen Sie Ihre Rechnung experimentell. Regen Sie das System dazu mit einem Gleitsinus (Sine Sweep) an. Verwenden Sie als Startfrequenz 0.5 Hz, als Endfrequenz 15 Hz, als Dauer 100 s und als Amplitude 1.3N (Vorsicht: in der Eingabemaske wird die Einheit der Amplitude mit mm falsch angegeben). Beobachten Sie wie das System durch die zwei Resonanzfrequenzen fährt und wie sie die Massen zueinander verhalten. Bei der Betrachtung der aufgenommenen Daten im Frequenzbereich (Bodediagramm) lassen sich die Resonanzfrequenzen gut erkennen; speichern Sie die Daten ab • Regen sie das System nun mit einem reinen Sinus in seiner ersten Eigenfrequenz an. Machen Sie die Amplitude der Anregung zunächst nicht zu groß (z.B 1N ). Messen Sie die Amplituden der Massen. Entsprechen die Amplitudenverhältnisse der berechneten Eigenform? Speichern Sie die Daten. • Wiederholen Sie den letzten Schritt für die zweite Eigenfrequenz. 4.3 Protokoll In dem Protokoll sollte prinzipiell der Weg beschrieben werden, der von Ihnen während des Versuches gegangen wurde. Dazu gehört grundsätzlich die Beschreibung der Aufgabenstellung, der Herangehensweise und Durchführung und die Ergebnisauswertung. Folgende Punkte sollte jedes Protokoll beinhalten: 9 • theoretische Grundlagen zum Ein- und Zweimassenschwinger • Auswertung und grafische Darstellung der vier aufgenommenen Datensätze (Ausschwingversuch, Anregung mit Sweep, Anregung mit erster und zweiter Eigenfrequenz). Zeigen Sie an Hand der Daten des Ausschwingversuchens exemplarisch, wie Sie die Eigenfrequenz und Dämpfung des Einmassenschwingers bestimmt haben. Aus dem Datensatz der während der Anregung mit einem Sweep aufgenommen wurde, sollen die Eigenfrequenzen des Zweimassenschwingers möglichst genau bestimmt werden. Achten Sie darauf, dass die Frequenz des Sweeps während des Versuches logarithmisch gesteigert wurde. Aus den anderen beiden Datensätzen soll jeweils die Eigenform bestimmt werden. • Vergleich von Messung und Rechnung im Hinblick auf die Eigenfrequenzen und Eigenformen • Fehlerbetrachtung und Fazit 10