Lego – NXT– BricxCC Der NXT-Baustein kann sowohl über die
Werbung

Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 10: Lego-Programm
Lego – NXT– BricxCC
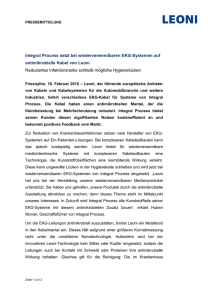
Der NXT-Baustein kann sowohl über die graphische Oberfläche von Lego als auch in einer
höheren Programmiersprache programmiert werden. Wir programmieren den Baustein in der
Sprache C, dies ermöglicht uns, das Programm als Grundlage für die Programmierung des
Mikrocontrolers zu verwenden. Das Programm BricxCC wird benötigt, um den NXT-Baustein
in C (Beispiel, siehe Abbildung 1) programmieren zu können. Das Lego Standartprogramm
LEGO-Mindstorm muss trotzdem installiert werden.
In dem Programm können die einzelnen Sensoren ausgelesen werden, deren Parameter mit
If-Bedingungen ausgewertet werden und über die drei Ausgänge werden die LEDs angesteuert. Die Verknüpfung zwischen Ein- und Ausgängen erfolgt nach der Tabelle im
Anhang 8: Anforderungsprofil Steuerung, Programmablaufplan.
Abbildung 1: Beispielprogramm
Erklärung zweier Befehle:
Lesen Sensor:
SensorUS(IN_1) → liest den Ultraschallsensor (US), der an Port 1
angeschlossen ist aus
Ausgabe LED:
OnFwd(OUT_C, 100) → ist eigentlich für die Motoren gedacht und
bedeutet, dass der Motor, der an Port C angeschlossen ist, mit voller
Leistung angesteuert wird, bei uns eine LED hell aufleuchtet
Seite 37 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 11: Infrarotsensor
Sensor
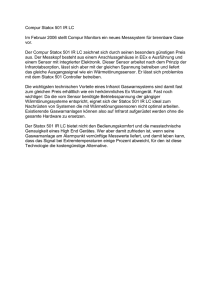
Für das NXT-Lego Modell werden vier Ultraschallsensoren genutzt. Ultraschallsensoren sind allerdings
nach intensiver Recherche nicht für unser System
F-o-S geeignet, da die Sensoren innerhalb des Autos
angebracht werden sollen. Hierdurch hat der Detektor
eine Glasscheibe vor sich. Der Ultraschallsensor ist
hier fehl am Platz, da dieser die Glasscheibe als
Objekt ansieht und dadurch immer ein Signal
empfangen würde. Deshalb kommt die Variante des
Infrarotlichts als einzig sinnvolle Alternative in Betracht. Abbildung 1: Infrarotsensor
Der IR-Sensor arbeitet auf dem Prinzip der Triangulation. Dieser Sensor bietet den Vorteil, dass er die Seitenscheiben nicht als
Objekt sieht, sondern durch sie „hindurch-schaut“. Die ausgewählten Sensoren
werden von der Firma Sharp hergestellt, es gibt sie in vielen verschiedenen
Ausführungen. Verwendet wird der GP2Y0A710K0F (Abbildung 1: Infrarotsensor), da
dieser eine Reichweite von bis zu 5,5 Metern hat. Für weitere Daten zum Sensor
siehe Anhang 12: Datenblatt.
Ansteuerungselektronik des Sensors
Das Modul des IR-Sensors benötigt eine spezielle Verdrahtung, um ordnungsgemäß
arbeiten zu können (Abbildung 2: Auswerteschaltung Sensor). Diese Schaltung wird
direkt hinten am Sensorgehäuse auf einer Platine in SMD Bauform angebracht
(Abbildung 3: Platinenlayout). Der Größenaufwand hält sich durch die SMD-Technik
in Grenzen, hierdurch wird viel Platz auf der kleinen Leiterplatte gespart. Auf der
Platine Hier können in naher Zukunft die Elektronik für die Funkübertragung und der
Solarmodule entstehen, dafür ist der übrige Platz mehr als ausreichend.
Abbildung 2: Auswerteschaltung Sensor
Abbildung 3: Platinenlayout
Spannungsversorgung
Der Stromverbrauch des Moduls hält sich positiver Weise in einem akzeptablen
Bereich. Nicht einmal 30 mA werden benötigt (Abbildung 4: Messwert
Stromaufnahme). Dies ist ein guter Wert, der auch den Betreib mit kleinen
Solarmodulen ermöglicht. Es wird 5 V Gleichspannung als Betriebsspannung der
Module benötigt. Da die Bordspannung in einem Auto gewöhnlich 12V DC beträgt,
muss die Spannung mit einen Spannungsregler (7805) auf die Zielspannung
gebracht werden. Das Regler-Modul (Abbildung 5: Schaltung Spannungsregler) ist
Seite 38 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
allerdings nicht direkt an dem Sensor, sondern in der Anzeigeeinheit vorne im Auto
verbaut.
Abbildung 4:: Messwert Stromaufnahme
Abbildung 5: Schaltung Spannungsregler
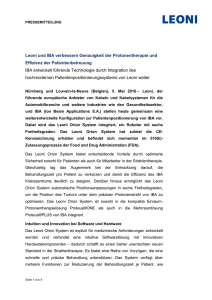
Sensor auslesen
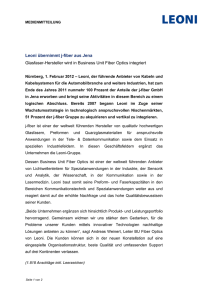
Der Sensor gibt einen Spannungspegel heraus, der
vom Abstand des Objektes abhängt. Um nun einem
gewissen Spannungswert eine Entfernung in der
Programmierung zuzuschreiben, muss im Datenblatt
nachgeschaut werden, welcher Spannungswert der
Entfernung von z.B. 250 mm entspricht (Abbildung 6:
Sensorkennlinie). Die gemessene Kennlinie (Abbildung 7: gemessene Kennlinie) entspricht der des
Datenblatts seht gut. Das Signal lässt sich vom
signal-out-Anschluß gegenüber GND erfassen. Eine
weitere Aufbereitung des Signals muss nicht erfolgen,
denn da der Spannungswert nicht über 3.5 Volt geht, Abbildung 6: Sensorkennlinie
kann er direkt an den ADC-Eingang eines Mikrocontrollers ohne Spannungsteiler angeschlossen werden. Dies erspart im Nachhinein auch die Umrechnung vom IST-Wert in den eigentlichen Wert, mit dem dann
die Entfernung bestimmt werden kann.
Ausgangsspannung in V
3,5
3
2,5
2
1,5
1
0,5
0
10 30 50 70 90 110 130 150 170 190 210 230 250 270 290
Entfernung vom Sensor in cm
Abbildung 7: gemessene Kennlinie
Seite 39 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 12: Datenblatt Sensor
Seite 40 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 13: Mikrocontroler
Mikrocontroller
Um mit dem Spannungswert einen Schaltvorgang o.ä. zu erzeugen, muss das Signal
ausgewertet werden. Dies erfolgt mit dem
Mikrocontroler ATmega 8 der Firma ATmel
(Abbildung 1: Anschlüsse ATmega 8). Diese
Mikroprozessoren sind einfach zu verbauen und
zu programmieren, außerdem gibt es sie in sehr
vielen verschiedenen Ausführungen, je nach
Verwendungszweck.
Der ATmega 8 verfügt über 8 kbyte Flashspeicher und 500 byte EEprom, welcher allerdings nicht weiter genutzt wird. Des Weiteren
hat der ATmega 8 sechs ADCs (Analog Digital
Wandler). 4 Kanäle unterstützen die volle Auflösung von 10bit, die anderen 2 verarbeiten nur
8 bit. Weitere Infos siehe Datenblatt ATmega 8.
Abbildung 1: Anschlüsse ATmega 8
Signal digital weiterverarbeiten
Das Signal liegt am Pin (23) des Controlers an. Dieser Port kann als ADC mit 10 bit
Auflösung konfiguriert werden. Damit wird das Analogsignal des Sensors digitalisiert.
Zur Verdeutlichung: 10 bit Auflösung bedeuten 1024 "Stufen", mit denen eine
Spannung aufgelöst werden kann. So hat z.B. der Spannungswert 2,00 V den
digitalen Wert von 409 bei einer Referenzspannung von 5 V. Der Referenzwert /
1024 ist die minimalste Auflösung in mV, bei unserem Beispiel liegt dieser bei ca.
4,88 mV. Die IST-Spannung (2,00 V) wird nun mit diesem Wert verrechnet. 2.00 V /
4.88 mV. Hierdurch ergibt sich der digitale Wert von 409. Der Wert 1024 würde bei
einem Pegel von 5 V erreicht werden. Um den ADC nutzen zu können, muss der
Controler daraufhin programmiert werden. Dies erfolgt in der Programmiersprache
"C", da diese recht übersichtlich und relativ einfach zu verwenden ist.
Der Programcode in der Hochsprache "C" sieht folgendermaßen aus:
int value=0;
DDRD=7;
DDRC &= ~_BV(PC0);
// PORTs als Ausgabe
// PC0 als Eingang
int MESSWERT (void){
long int analogwert=0;
ADCSRA=0x80;
// ADC eingeschaltet, kein Prescale
Seite 41 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
ADMUX=0;
Formatierung
ADCSRA |=_BV(ADSC);
// ADC Ref auf Avcc, ADC0 gewaehlt, normale
while (ADCSRA & (1<<ADSC)) {;}
// auf Abschluss der Konvertierung warten
// single conversion mode ein
analogwert=ADCW;
return (analogwert);}
Auswertung
Nachdem das Programm den ADC
ausliest und den Digitalwert ausgibt,
kann dieser weiterverwendet werden, um
z.B. Schaltvorgänge auszulösen. Dies
kann mithilfe einer einfachen WennAbfrage geschehen. Wenn der Messwert
größer ist als 409, dann soll der Port
PD2 eingeschaltet werden, wenn die
Bedingung nicht erfüllt ist, also Messwert
< 409, soll PD2 ausgeschaltet werden.
Während des Elektropraktikums wurde
einen Nachmittag lang über die
sinnvollste Auswertemöglichkeit diskutiert, siehe Abbildung 2: Auswertung.
Mit diesen Wenn-Abfragen können nun
komplexe Programme entstehen, die je
nach dem welche Spannung am ADC
anliegt, andere Schaltvorgänge auslösen.
Abbildung 2: Auswertung
Formulierung der Bedingungen:
Allgemein:
Wenn(Wert>409) Port PD2 auf high level ; ansonsten Port PD2 auf low level
In "C" sieht das ein wenig anders aus:
if(Wert>409) PORTD |= _BV(PD0) ; else PORTD &= ~_BV (PD0);
Seite 42 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 14: Anzeigeeinheit
Anzeigeeinheit
Die mobile Anzeigeeinheit des F-o-S ist als Entwurf in Abbildung 1 gezeichnet.
Der 12-V-Zigarettenanzünderstecker (lila) kommt in die Kfz-ZigarettenanzünderBuchse. Der Ein-Schalter (schwarz) befindet sich auf der rechten Seite des Gerätes.
Die Entfernung der Sensoren wird mit dem grünen Taster auf der linken Gehäuseseite eingestellt.
Sobald ein Objekt von dem ersten Sensor, hier Sensor A, Überholtwerden, detektiert
wird, leuchtet die untere LED (gelb, linke Seite) auf. Ist das Objekt vollständig im
toten Winkel, leuchtet der Pfeil (LED rot, linke Seite) mit auf. Zusätzlich ertönt in
diesem Fall der auf der linken Seite eingebaute Summer.
An den Seiten des Anzeigegerätes sind die Buchsen für die Stecker der Sensoren
angebracht, gelb für die vorderen und blau für die hinteren Sensoren.
F o S
© MGS Vision-ING 2013
Abbildung 1: Entwurf Anzeigeeinheit
Seite 43 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 15: Bau Halterung
Halterung
Der Sensor ist auf ein Kugelgelenk aufgeschraubt. An dem Kugelgelenk ist eine
Aluminiumplatte befestigt. In die Aluminiumplatte sind zwei Bohrungen eingebracht,
durch die zwei handelsübliche Saugnäpfe gesteckt werden. Jeder Saugnapf wird
durch einen Aluminiumring und einen Bolzen fixiert. Die Sensoren blicken in die
Richtung der Saugnäpfe. Durch das Kugelgelenk ist der Sensor drehbar gelagert,
damit der Sensor ausgerichtet werden kann. Bild 1 zeigt die technischen Zeichnungen, Bild 2 ein Foto des fertigen Sensors.
Bild 1: technische Zeichnungen
Bild 2: Foto des fertigen Sensors
Seite 44 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 16: Gebrauchsanleitung
F-o-S
Fahren ohne Sorgen
Gebrauchsanleitung
© MGS Vision-ING 2013
Herzlichen Glückwunsch!
Sie sind nun stolzer Besitzer des neuen F-o-S Toter-Winkel-Assistenten. Mit diesem in Deutschland
produzierten Qualitätsprodukt haben Sie sich für den Marktführer in dieser Klasse entschieden. Durch
die Verwendung von ausschließlich hochwertigen Materialien gewährleistet Ihnen MGS Vision-ING eine
lange Lebensdauer des Produkts und somit starke Robustheit gegen äußere Einflüsse. Durch unsere
Hochleistungssensoren erleben Sie sowohl ein besseres als auch sichereres Fahrerlebnis. Unser
System ist weltweit einzigartig und somit sehr auf dem Automarkt gefragt, da es ohne Fachwissen in
jede Fahrzeugklasse mobil integriert werden kann. Dies bestätigt auch der TÜV-Süd, welcher unser
Produkt auf Sicherheit geprüft hat. Unser System funktioniert mit Infrarotdioden, mit diesen decken
unser F-o-S einen Umkreis von bis zu 5 Metern ab. Das Gadget unterstützt Sie als Fahrer, um
eventuelle Gefahren schneller zu erkennen und sorgt somit für mehr Sicherheit im Straßenverkehr.
Bedenken Sie allerdings, dass der F-o-S den Schulterblick nicht ersetzt! Wir wünschen Ihnen nun viel
Spaß mit unserem Produkt und allzeit gute Fahrt.
Montage
Bei der gesamten Montage ist zu beachten, dass Sie jeglichen Kontakt mit den Linsen der Sensoren
vermeiden. Positionieren Sie die Haltevorrichtung mittig am oberen Ende der Scheibe. Der Sensorkopf
sollte dabei unterhalb der Saugnäpfe liegen (siehe Bild 1). Im Anschluss muss darauf geachtet werden,
den Sensor horizontal auszurichten. Mit diesem letzten Schritt haben Sie die Installation des ersten
Sensors des F-o-S abgeschlossen. Wiederholen Sie nun die Montage an jeder weiteren Seitenscheibe.
Sollten Sie ein Fahrzeug mit nur zwei Seitenscheiben besitzen Montieren sie den Sensor nicht mittig
sondern jeweils einen am vorderen bzw. hinteren Ende der Scheibe (siehe Bild 2).
Seite 45 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Bild 2
Bild 1
Positionieren Sie nun das Anzeigegerät so, dass Sie es gut während der Fahrt im Auge haben und
befestigen Sie es. Stecken Sie nun die farbig markierten Stecker ein und verlegen Sie die Leitungen so,
dass Sie weder beim Fahren noch beim Ein- und Aussteigen behindert werden. Verbinden Sie die
Anzeigeeinheit mit dem Zigarettenanzünder und schalten Sie die Anzeigeeinheit ein. Stellen Sie nun
noch den Abstand der Sensoren mit Hilfe des grünen Tasters ein, je 50 cm Abstand einmal die Taste
drücken. Beispiel: Beträgt der Abstand der Sensoren 1,5 m, so müssen Sie dreimal die grüne Taste
drücken, 3 mal 50 cm gleich 1,5 m.
Sie haben es geschafft: Ihr F-o-S ist einsatzbereit!
Ihr MGS Vision-ING
Lieferumfang:
4 Sensoren mit Halterung
benötigter Kabelsatz
Anzeigeeinheit
12V Anschlussstecker
Klebepads
Technische Daten
Spannungsversorgung: 12V DC
Stromaufnahme: 0.2A … 2,4 W
Reichweite: 5 Meter
Abmessungen Sensor: 81 mm x 61 mm
Abmessungen AuswerteElektronik: (folgt)
Anschlussbelegung der Adern:
Rot: +5 V
Schwarz: 0 V (Masse)
Gelb: Datenleitung vorderer Sensor
Blau: Datenleitung hinterer Sensor
USB-Port: nicht vorhanden
bluetooth: nicht vorhanden
Seite 46 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 17: Protokolle
Besuch der MGS bei der LEONI AG am 21.1.2013
Ort:
LEONI AG, Marienstraße 7, 90402 Nürnberg
Datum:
21. Januar 2013 von 10:00 bis 13:00 Uhr
Anwesend: Schüler der Klasse 11 Td, Herr Eidenhardt, Herr Höhl, Herr Iberl, Herr Renau
LEONI-Vorstellung:
• Vorsitzender Dr. Brandt
• Dr. Land
• Herr Werner (Kaufmännisches)
Kunden / Zusammenarbeit mit: Delphi, Bosch, Continental für Radar, Infrarot-, Kamerabasierte Systeme.
Vorstellung Projekt 11 Td:
• Mobiler Toter-Winkel-Assistent z.B. Fahrschule, Wohnmobile
• Günstige Preisklasse
•
•
•
•
•
Information über angebotene Systeme durch LEONI -Vertreter
Probleme:
o Stehende Objekte dürfen nicht warnen > dies wäre als Entwicklungsziel zu
formulieren
o Infrarot: Autoscheiben dämpfen Infrarot-Strahlen oder absorbieren sie sogar
o Sonneneinstrahlungseffekte
Lösung:
o Muss Aufgaben / Anwendung einschränken, z.B. nur für Autos ohne
Wärmeschutz
Befestigung im Auto?
o Kopfstütze oder
o An Scheibe
Vorschlag LEONI:
o Problemstellung entkoppeln:
1 Gruppe kümmert sich um Halterung
2. Gruppe um Form des „dummen“ Teils
3. Gruppe um die Sensorik
Was kann Leoni tun?
• Bitte um Unterstützung besonders bei der Präsentation
• Studenten-Team: Unterstützung bei der Verkabelung
• LEONI verfügt über Plotter
Aufbau der Präsentation / Vorgehen auf Vorschlag s:
• Film: Playmobil arrangieren?
• Klärung der verschiedenen Sensorprinzipien und
• Begründung, weshalb das jeweilige Sensorprinzip gewählt wurde.
Grobkonzeption des Ablaufs:
Seite 47 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
•
•
•
•
•
•
Meilensteine (ab dann keine kritische Betrachtung des Konzepts mehr)
Auswahl
Feinkonzeption
o 3D-Entwürfe
o Programmierung
Funktionsfähiger Prototyp
Design-Verifikation
o widrige Bedingungen, z.B. Sonneneinstrahlung
o Tests
Produkt-Validation
Seite 48 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Protokoll 11. Treffen VisionIng-Gruppe
Ort:
Max-Grundig-Schule
Datum:
02.04.13
Uhrzeit:
14:00 Uhr bis 15:30 Uhr
Leitung:
Johannes Gareis
Anwesend:
Max Krampe, Jens Plaschko, Philipp Hergesell, Armin Fischer,
Sandip Nijar, Ronny Leib, Herr Renau
Abwesend:
-
Protokollant: Max Krampe
Tagesordnung:
1. Bericht Armin und Jens und Max
2. Weiterführen der Teilprojekte
Top 1:
Armin erklärt und Aufbau und Funktion des Infrarotsensors. Armin misst die
Spannungsabfälle, die bei unterschiedlichen Distanzen des Infrarotsensors zum
Objekt erzeugt werden. Er verwendet dazu ein digitales Messgerät (Metra HIT ONE),
um die Messungen präzise durchzuführen. Bei den Messungen werden ebenfalls die
Grenzen des Sensors ermittelt. Die Daten werden in eine Excel-Datei übernommen
und graphisch dargestellt. Der Vergleich mit dem Datenblatt des Sensors ergibt ein
zufriedenstellendes Messergebnis. Der Sensor eignet sich somit gut für unser
Projekt.
Jens und Max haben eine Patentrecherche durchgeführt. Sie zeigen uns kurz den
Aufbau der offiziellen Patentwebsite (http://www.dpma.de/) und erklären uns in
groben Zügen, wie man eine Patentrecherche durchführt. Sie stellen ein Beispiel
eines Patentes vor.
Das Ergebnis ihrer Recherche ist, das es keinen universell einsetzbaren TotenWinkel-Assistenten gibt.
Top 2:
Alle Gruppen arbeiten in ihren Teilprojekten weiter.
Seite 49 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Anhang 18: Besuch bei LEONI
Treffen bei LEONI
Wir fuhren mit dem Zug zu LEONI Bordnetz-Systeme GmbH in Kitzingen, um einen
Einblick in den Bordnetzbau bei Kraftfahrzeugen zubekommen. Auf der Zugfahrt
haben wir die letzten Dokumente unseres Projektes F-o-S noch einmal überarbeitet
und besprochen, um gut vorbereitet zu sein. Bei LEONI wurden wir von einem
Mitarbeiter der Firma LEONI empfangen und uns wurde ein grober Überblick über die
Firma LEONI gegeben. In einem Ausstellungsraum wurden uns die Entwicklungen
der Firma gezeigt.
Um Gewicht zu sparen, wird versucht, die Kupferleitungen durch die leichteren
Aluminiumleitungen zu ersetzen. Aluminiumleitungen haben einen höheren
spezifischen Widerstand, deshalb müssen die Leitungsquerschnitte entsprechend
vergrößert werden. Aluminiumleitungen müssen auch an den Anschlussstellen
besser vor Korrosion geschützt werden. Eine weitere Entwicklung von LEONI ist das
Einschäumen von Kabelbäumen für eine definierte Formgebung zum besseren
Einbau. Damit wird erreicht, dass sich die Leitungen nicht gegeneinander
verschieben können und somit die Isolation nicht beschädigt wird. Ein weiterer
Aspekt ist, dass die geschäumten Kabelbäume besser ölresistent sind. Das
Einschäumen kommt vor allem in Nutzfahrzeugen zum Einsatz, da hier besonders
lange Lebenszeiten erreicht werden müssen.
Beindruckend war die Darstellung eines kompletten Kabelbaums, mit einer
Leitungslänge von insgesamt 3000 bis hin zu 6000 Metern, siehe Bild 1.
Bild 1: VisionIng-Gruppe vor einem kompletten Kabelbaum eins PKWs
Der zweite Teil der Führung führte uns zu einer SLS Maschine. Herr Schneider stellte
uns ein SLS Gerät vor. Übersetzt bedeutet es selektives Lasersintern. An diesem
Gerät ist ein PC angeschlossen mit einer Grafiksoftware, welche ein 3D Modell in
Schichten zerlegt. Das Modell wird in der Maschine Schicht für Schicht erstellt, dabei
wird immer eine neue Pulverschicht aufgetragen und mit dem Laser beschossen, die
Seite 50 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
Pulverkörner sintern dabei zu einem Werkstück. Es wird von der kleinsten Fläche zur
größten hin aufgebaut, da sich die Wärme des Lasers zunehmend entwickelt.
Außerdem muss man einen Abstand von 20 mm mindestens zum Rand lassen, da
sonst der kalte Rahmen die Wärmeabfuhr ungleich beeinflusst und die Werkstücke
sich dadurch verzeihen können. Danach werden die übrig gebliebenen Pulverkörner
mit einem Pinsel fein säuberlich abfegt. Übrige Reste werden mit Glasperlen
‚gesandstrahlt‘. So kann man bereits voll funktionierende mechanische Bauteile
erschaffen, z.B. auch eine Kugel in einer anderen. Der Sinterprozess kann bis zu 30
Stunden dauern, das Abkühlen eben solange.
Kabelsätze in einem Abdichtelement ist der letzte Punkt unserer Tour. Dabei werden
die fertigen Kabelbäume in eine vorgefertigte Gussform eingelegt. Die Kabel
brauchen nicht fixiert werden, durch die geometrische Form von Rippen wird erreicht,
dass keine Leitungen so liegen, dass sie von außen später beschädigt werden
können. Es wird ein schwarzer Zweikomponenten-Kunststoff in die Form eingefüllt,
der in etwa in vier Minuten aushärtet.
Zum Abschluss unseres Besuches durften wir einen eigenen Kabelbaum herstellen.
Wir haben dazu einen technischen Plan mit allen Daten und vorbereitete Kabel und
Stecker bekommen. Die einzelnen Schritte des Baus wurden uns erklärt. Auf der
Zeichnung sind von den jeweiligen Anschlüssen (Steckern) die Pins mit der Belegung
der Drähte angegeben. Der Plan zeigt auch, nach welchem Abstand eine
Abzweigung kommt. Welche Drähte abzweigen, kann man nachverfolgen, indem
man bei dem Ausgangsstecker die einzelnen Belegungen nachverfolgt. Danach
durften die Schüler ihren eigenen Kabelbaum erstellen. Die Drähte wurden mit
Gewebeband fixiert. Der fertige Kabelbaum wurde am Ende mit einem
Durchgangsprüfer geprüft (siehe Bild 2 und 3).
Bild 2 & 3: Bau eines Kabelbaums
Seite 51 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
6. Quellen und Recherchen
Die Recherche für das Projekt erfolgte im Wesentlichen über das Internet. Das Technologieund das Physikfachbuch wurden soweit wie möglich verwendet.
Holler E. (Hrsg.), Technologie für die berufliche Oberschule, Verlag H. Stam GmbH,
Köln 2001
Hammer, Krauth, Kühnel, Physik 11, Oldenbourg Schulbuchverlag GmbH,
München 1997
Kuchling H., Taschenbuch der Physik, Fachbuchverlag Leipzig – Köln,
Leipzig 1995
Marktübersicht Tote-Winkel Assistenten
siehe Anhang 4: Marktanalyse
Patentrecherche
https://depatisnet.dpma.de
Programm bricxCC
http://www.sourceforge.net/projects/bricxcc/
Lego-NXT-Anleitung
Frank Engeln, VS-Möbel
http://www.vlin.de/vlin2/material/NXC.pdf
Mikrocontroler ATmega 8 der Firma ATmel, Datenblatt
http://www.atmel.com/Images/Atmel-2486-8-bit-AVR-microcontrollerATmega8_L_summary.pdf
Übesetzung
http://www.translate.google.de
Seite 52 von 53
Schule: Max-Grundig-Schule Fürth, FOS
Partner-Unternehmen: LEONI
Altersklasse: 16++
Thema: F-o-S, Fahren ohne Sorgen
7. Datum und Unterschrift
Seite 53 von 53