Versuchsanleitung
Werbung

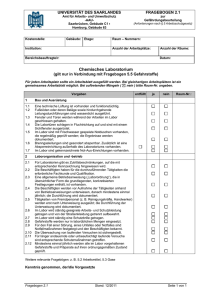
Labor Mechatronik Versuch MV-4 Proportionalhydraulik Fachbereich 2 Ingenieurwissenschaften II Steuerungund Regelung Labor Mechatronik Lehrgebiet Mechatronische Systeme Versuchsanleitung Versuch MV_4 FB2 Stand Mai 2009 Hydraulikmotor mit Proportionalventil Prof. Hartenstein Seite 1von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik 1. Versuchsgegenstand – Versuchsziel Die Zielstellung des Versuches ist das Kennen lernen der Anwendung und Ansteuerung eines Hydraulikmotors mittels elektrischer Steuerung und Proportionalventil am Beispielaufbau der MANNESMANN-REXROTH Übungskomponenten. 2. Literatur Unterrichtsmaterialien Schulungsunterlagen Lehrbücher 3. Versuchsvorbereitung - Kontrollfragen Folgende Fragen sind während der Durchführung zu beantworten und werden vom betreuenden Professor oder Labor Ingenieur abgefragt: 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Wie arbeitet ein Proportionalventil? Erkläre die Funktion des PID - Reglers im Versuchsaufbau. (Seite 11, Bauteil 4) Erkläre die Funktionsweise eines Differentialtrafo. (Seite 11, Bauteil 11) Erkläre den Unterschied zwischen einem DD2 und einem DD4 Ventil. Was beeinflusst die Rampenzeit? Nennen Sie die beiden Proportional-Magnettypen. Zeigen Sie bei einem kraftgeregelten Proportional-Magneten das Ausgangssignal. Zeigen Sie bei einem hubgeregelten Proportional-Magneten das Ausgangssignal. Nennen Sie drei Kennlinienverläufe. Erläutere die Funktionsweise eines Hydromotors. . 4. Versuchsdurchführung – Hinweise zur Versuchsauswertung 4.1 Einführung Der Begriff Proportionalventil leitet sich aus dem Verhalten des Proportionalmagneten ab. Hier ist das Ausgangssignal eine dem Eingangssignal (Strom) proportionale Kraft. Bild 1 zeigt die Kennlinie eines kraftgeregelten Proportional-Magnetes. Belastet man mit der proportionalen Kraft eine Feder, dann ergibt sich als Ausgangssignal ein Weg, der proportional zur Kraft und somit auch proportional zum Eingangssignal (Strom) ist. Aus Konstruktionsgründen ist es nicht immer möglich, ein echtes proportionales Verhältnis (linearer Zusammenhang) zwischen Eingangsstrom und Kolbenverschiebung zu verwirklichen. FB2 Stand Mai 2009 Prof. Hartenstein Seite 2von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik In solchen Fällen kann man durch den Einsatz eines Wegaufnehmers, der den Magnethub misst, und eines elektronischen Reglers, der sich auf der Ansteuerelektronik befindet, ein gut geregeltes proportionales Verhalten des Ausgangssignals (Weg) zum Eingangssignal erreichen. Der elektronische Regler vergleicht den Istwert mit dem Sollwert und regelt die Differenz bzw. Fehler weitgehend aus. Diesen Magneten bezeichnet man als hubgeregelten Proportional-Magneten. Eine genaue Beschreibung der beiden Magnetarten finden Sie im Systemhandbuch sowie im HydraulikTrainer Band 2. Bezieht man die oben beschriebenen Zusammenhänge auf das Proportionalventil, so gelten diese nur teilweise. Um dies näher zu erklären, betrachten wir das in diesem Versuch verwendete 4/3 Proportional-Wegeventil vom Typ 4WRE6, welches einen hubgeregelten Magneten hat. Bild 2 zeigt hierfür die Kennlinien über den Zusammenhang zwischen Eingangssignal (Sollwert, bezogen auf den Nennsollwert) und Ausgangssignal (Volumenstrom). Betrachtet man z.B. die Linie 5, die für einen konstanten Ventildruckabfall von 100 bar gilt, so erkennt man, dass sie nicht der anfangs beschriebenen Beziehung genügt. Die Abhängigkeit des Volumenstromes vom Sollwert ist hier nicht linear, sondern angenähert quadratisch. FB2 Stand Mai 2009 Prof. Hartenstein Seite 3von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik In der Proportional-Hydraulik spricht man von einem progressiven Kennlinienverlauf. Die Form der Kennlinie kann durch konstruktive Maßnahmen an der Steuerkante den speziellen Anforderungen der Praxis angepasst werden. Bild 3 zeigt drei verschiedene Kennlinienverläufe, wie sie bei Proportionalventilen ausgeführt werden. Die Kennlinie (1) ist linear und wird meistens bei Proportional-Druckventilen und auch bei Proportional-Stromventilen ausgeführt. Den progressiven Kennlinienverlauf (2) gibt es bei Proportional-Wegeventilen und Proportional Stromventilen. Sie hat den Vorteil, dass man im unteren Bereich feinfühliger steuern kann. Bei der Kennlinie (3) ist der Feinregelbereich noch stärker ausgebildet. Am Ende steigt die Kennlinie dann stark an. Diese Kennlinienart kommt bei Proportional-Wegeventilen und Proportional-Stromventilen vor. Die drei Kennlinienarten zeigen, dass das hydraulische Ausgangssignal (Volumenstrom, Druck) proportional zum elektrischen Eingangssignal (Sollwertspannung) sein kann, wenn dies aufgrund des jeweiligen Einsatzfalles notwendig ist. Muss man aber die Geschwindigkeit eines Verbrauchers (Motor, Zylinder) im unteren Bereich sehr genau steuern und benötigt zusätzlich noch eine hohe Eilganggeschwindigkeit, dann wird die Kennlinie (3) zum Einsatz kommen. Im Versuch sollen Sie nun einen Hydromotor mit einem Proportional-Wegeventil ansteuern. Dabei sollen die Drehrichtung und Drehzahl mit einem Potentiometer verändert werden. 4.1 Versuchsaufbau Aufgabenstellung: Ergänzen Sie den Schaltplan so, dass mit einem Ventil die Drehrichtung und Drehzahl des Hydromotors verändert werden können. Begrenzen Sie den Systemdruck mit einem geeigneten Ventil. FB2 Stand Mai 2009 Prof. Hartenstein Seite 4von 16 Labor Mechatronik FB2 Stand Mai 2009 Versuch MV-4 Prof. Hartenstein Proportionalhydraulik Seite 5von 16 Labor Mechatronik FB2 Stand Mai 2009 Versuch MV-4 Prof. Hartenstein Proportionalhydraulik Seite 6von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik 4.3 Elektrische Schaltung Überlegen Sie sich eine Schaltung, mit der die Kontakte 12c und 24c der Ansteuerelektronik VT 5005 verbunden und wieder getrennt werden können. Verwenden Sie dazu einen Schützkontakt, der beim Betätigen eines Taster-Ein schließt und beim Betätigen eines TasterAus öffnet. Die Kontaktbelegung des Schützes kennzeichnen Sie dadurch, indem Sie hinter den Kontakten, die sich im Stromlaufplan unterhalb der Schützspule befinden, die Nummer des Strompfades eintragen, indem sich der jeweilige Kontakt befindet. Mit dem Potentiometer LER2 können Sie den Sollwerteingang von -9V bis +9V stufenlos verändern. Der maximale Ausschlag für den Soll- und lstwert an den Messbuchsen ist ±6V, dies entspricht ±9V am Sollwerteingang. Wählen Sie einen geeigneten Spannungsmessbereich am Digitalvielfachmessgerät zur Messung von Soll- und lstwert aus. Schließen Sie das Potentiometer LER2 und das Digitalvielfachmessgerät LEDVM1 an die entsprechenden Kontakte an. Zeichnen Sie zuerst die an die Ansteuerelektronik VT 5005 anzuschließenden Geräte und Leitungen in das Aufgabenblatt (Anschlussbelegung) ein. Anschließend zeichnen Sie die komplette Schaltung in das Aufgabenblatt (Stromtaufplan) ein. FB2 Stand Mai 2009 Prof. Hartenstein Seite 7von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik Aufgabenblatt Anschlussbelegung (elektrische Schaltung) FB2 Stand Mai 2009 Prof. Hartenstein Seite 8von 16 Labor Mechatronik Versuch MV-4 Aufgabenblatt FB2 Stand Mai 2009 Proportionalhydraulik Stromlaufplan Prof. Hartenstein Seite 9von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik Versuchvorbereitung Legen Sie sich für den Versuch folgende Geräte zurecht: Bauelemente Hydraulik FB2 Stand Mai 2009 Prof. Hartenstein Seite 10von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik Bauelemente Elektrik FB2 Stand Mai 2009 Prof. Hartenstein Seite 11von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik Bauen Sie jetzt die elektrische Schaltung auf. Gehen Sie dabei nach folgenden Punkten vor: • Das Steuerpult ist ausgeschaltet, die Anlage stromlos. • Hängen Sie den Hauptschalter LES die 2-polige Sicherung LEF1, den Taster-Ein LES2, den Taster-Aus LES3, das Schütz LEK das Potentiometer LER2, das Vielfachmessgerät LEDVM1 und die 2 Verteilungen LEE in die Experimentierwand, und arretieren Sie die Geräte mit den Rändelschrauben. • Verbinden Sie nun die einzelnen Geräte entsprechend dem elektrischen Stromlaufplan mit den Laborschnüren. Verwenden Sie für elektrisch positive Anschlüsse rote Laborschnüre und für elektrisch negative Anschlüsse blaue Laborschnüre. Dies erleichtert bei eventuellen Fehlern das Auffinden der Fehlerursache. • Schließen Sie das 4/3 Proportional-Wegeventil DW6E mit den beiden Anschlusskabeln für die Magnete Y1 und Y2 und das Anschlusskabel für den elektrischen Wegaufnehmer an die Ansteuerelektronik an. Verwechseln Sie dabei nicht die Magnete Y1 (A) und Y2 (B). Der Magnet A befindet sich bei diesem Ventil auf der Seite des Wegaufnehmers. Schließen Sie das Digitalvielfachmessgerät LEDVM1 mit den Messleitungen an die Sollwert-Messbuchsen der Ansteuerelektronik an. 4.4 Versuchsdurchführung Schritte zur Versuchsdurchführung: 1. Hat Ihr Betreuer die aufgebauten Schaltungen kontrolliert? 2. Kontrollieren Sie, ob das Stromregelventil am Ausgang der Zentralversorgung zum Übungsstand auf 5 L/min eingestellt ist. Dies entspricht etwa einer Einstellung von 1.24 an der Skala des Stromregelventils. 3. Vergewissern Sie sich, dass die Verbindungsschläuche sicher sitzen (Zugprüfung). 4. Stellen Sie sicher, dass alle Not-Aus-Taster an der Zentralversorgung angeschlossen sowie ausgerastet sind und an den Übungsständen liegen. 5. Schalten Sie nun den roten Hauptschalter der Zentralversorgung auf 1. 6. Stellen Sie sicher, dass der Hauptschalter LES ausgeschaltet ist. Schalten Sie die Stromversorgung am Steuerpult mit dem Schlüsselschalter ein, indem Sie den Schlüssel nach rechts drehen und eindrücken. In gedrücktem Zustand muss der Schlüssel wieder in die senkrechte Ausgangslage zurückgedreht werden. Schalten Sie den Hauptschalter LES ein. 7. Drehen Sie das Potentiometer LER2 entgegen dem Uhrzeigersinn auf Anschlag. 8. Stellen Sie den Messbereich des Digitalvielfachmessgerät LEDVM1 auf 20V Gleichspannung, und schalten Sie es ein. 9. Drücken Sie den Taster-Ein S1. Nun sollte das Digitalvielfachmessgerät eine Spannung von -9V anzeigen. Ist dies nicht der Fall, dann drehen Sie das Potentiometer, der Ansteuerelektronik so lange, bis es 9V anzeigt. Ist die Anzeige im FB2 Stand Mai 2009 Prof. Hartenstein Seite 12von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik positiven Bereich, dann vertauschen Sie die Messleitungen an den Anschlüssen des Digitalvielfachmessgerätes. 10. Drehen Sie das Potentiometer LER2 in Mittelstellung (Skala auf 50). Das Digitalvielfachmessgerät soll dabei eine Spannung um Null (±0,2V) anzeigen. 11. Schalten Sie die Pumpe der Zentralversorgung mit dem grünen Knopf “Pumpe Ein“ an. Achten Sie darauf, dass die Absperrhähne an den benachbarten Übungsständen der Zentralversorgung geschlossen sind. 12. Öffnen Sie den Absperrhahn am Ausgang der Zentralversorgung, an dem sich Ihr Übungsstand befindet. Versuch: a) Begrenzen Sie den Systemdruck mit dem Druckbegrenzungsventil DD4 auf 20 bar. Dieser Druck wird am Manometer DZ1/1 angezeigt. b) Stellen Sie den Druck mit dem Druckreduzierventil DD2 auf 6 bar ein. Dieser Druck wird am Manometer DZ1/2 angezeigt. c) Drehen Sie die beiden Druckbegrenzungsventile DD1 ganz heraus (minimaler Druck) und dann wieder 6 Umdrehungen hinein. d) Stellen Sie die kürzeste Rampenzeit auf der Ansteuerelektronik ein. Die Rampenzeit wird mit Hilfe des Adapters eingestellt. Die Handhabung des Adapters für Rampeneinstellung finden Sie im Systemhandbuch Kapitel 8. e) Drehen Sie das Potentiometer LER2 entgegen dem Uhrzeigersinn auf Anschlag (Stellung 0) und anschließend in Zehnerschritten wieder zurück auf Anschlag (Stellung 10). Beobachten Sie dabei den Soll- und Istwert am Digitalvielfachmessgerät sowie die Drehrichtung und Drehzahl des Hydromotors. Damit Sie den Soll- und Istwert bei jeder Potentiometereinstellung messen können, müssen Sie jedes Mal die Messleitung umstecken oder das zweite Digitalvielfachmessgerät verwenden. Tragen Sie die Ergebnisse in die Tabelle 1 ein. f) Verstellen Sie das Potentiometer LER2, so schnell es Ihnen möglich ist, von einem zum anderen Anschlag und beobachten dabei den Hydromotor. Anschließend stellen Sie eine Rampenzeit von 4 Sekunden ein und drehen, wie zuvor, das Potentiometer LER2 von einem zum anderen Anschlag. Tragen Sie Ihre Beobachtungen in die Tabelle 2 ein. Stellen Sie den Sollwert auf 2V und erhöhen mit dem Druckbegrenzungsventil DD4 den Systemdruck auf 40 bar. Beobachten Sie dabei die Drehzahl des Hydromotors DM1. Tragen Sie Ihre Beobachtungen in die Tabelle 3 ein. g) Stellen Sie den Sollwert auf 5V und verstellen den Systemdruck auf 20 bar. Tragen Sie Ihre Beobachtung in die Tabelle 3 ein. h) Drücken Sie den Taster-Aus S2, und schalten Sie das Digitalvielfachmessgerät LEDVM1 aus. Schließen Sie den Absperrhahn am Ausgang der Zentralversorgung zu Ihrem Übungsstand. i) Schalten Sie die Stromversorgung mit dem Hauptschalter LES1 und dem Schlüsselschalter am Steuerpult aus. j) Tragen Sie die Istwerte aus der Tabelle 1 über den Sollwerten 0 bis 6V in das Diagramm ein. FB2 Stand Mai 2009 Prof. Hartenstein Seite 13von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik 4.5 Auswertung Tabelle 1: Stellung des Potentiometers Sollwert Istwert (%) (V) (V) Drehrichtung des Motors (links/rechts/ Stillstand Drehzahl des Motors (max./langsam/ schnell/Null) 0 10 20 30 40 50 60 70 80 90 Maximalstellung Kennlinie zu Tabelle1: FB2 Stand Mai 2009 Prof. Hartenstein Seite 14von 16 Labor Mechatronik Versuch MV-4 Proportionalhydraulik Kennlinie zu Tabelle 1 10 8 6 Spannung in [V] 4 2 Sollwert (V) Istwert (V) 0 -2 -4 -6 -8 -10 Stellung des Potentiometer Tabelle 2: Rampenzeit Minimal (0,03s) 4s Verhalten des Hydromotors Tabelle 3: FB2 Stand Mai 2009 Prof. Hartenstein Seite 15von 16 Labor Mechatronik Systemdruck Versuch MV-4 20bar Proportionalhydraulik 40bar Sollwert 2V 4V Erklärung zum Versuchsergebnis: Wenn Sie den Soll- mit dem Istwert vergleichen, dann sehen Sie hier den proportionalen Zusammenhang. Die Proportionalitäts-Konstante ist -1 d.h. Sollwert = -Istwert. Betrachten Sie die Drehzahl, so sehen Sie, dass hierfür diese Beziehung nicht mehr gilt. Die Ursachen liegen zum einen an der Ausbildung des Steuerquerschnitts, zum anderen an den nicht konstanten Ventildruckgefällen und an dem zu kleinen Pumpenvolumenstrom des Versorgungsaggregats. FB2 Stand Mai 2009 Prof. Hartenstein Seite 16von 16