Stromzwischenkreis-Umrichter (I-Umrichter)
Werbung
")
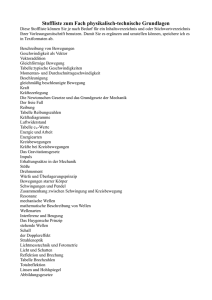
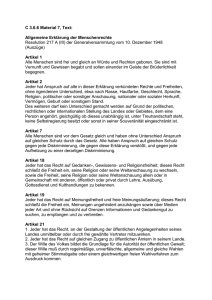
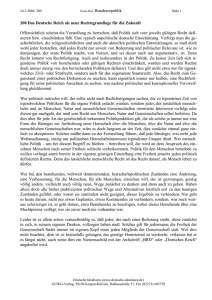
Stromzwischenkreis-Umrichter (I-Umrichter) Die Schaltung entspricht grundsätzlich einer sechspulsigen Brückenschaltung im Wechselrichterbetrieb (α=150o). Durch eine Glättungsdrossel im speisenden Gleichstromkreis wird der Strom im Wechselrichter und in der Last eingeprägt. Der Ausgangsstrom und die Lastimpedanz bestimmen den Verlauf der Ausgangsspannung und diese steuert die Kommutierung. Als Last kann nur ein Verbraucher oder mehrere gleiche, parallelgeschaltete Verbraucher angeschlossen werden. Eine Energierückspeisung von der Last in den Gleichstromkreis ist durch Verschieben der Zündimpulse oder durch Bremsbetrieb des Motors möglich. Dabei kehrt sich die mittlere Gleichspannung Ud um. Rückspeisedioden sind wegen des eingeprägten Stromes nicht erforderlich, aber die Ventile sehen auch eine Spannung in Sperrichtung, daher sind Thyristoren geeignete Schalter. Ist die Last eine passive Last, so kann sie durch ein RL-Glied dargestellt werden; ist sie ein Asynchronmotor, so ist Ls die Ständerindukitivität und statt R erscheint die induzierte Spannung als Wechselspannungsquelle. Der Strompfad wird mit dem Zünden des nachfolgenden Ventils kommutiert. Die Kommutierungskondensatoren löschen den in der vorangegangenen Phase leitenden Thyristor (Phasenfolgelöschung) und werden während der Kommutierung umgeladen, so daß sie in der nächsten Phase die notwendige Kommutierungsspannung liefern können. Die Dioden D1 bis D6 verhindern das Entladen der Kondensatoren zwischen den Kommutierungsvorgängen. I + d T3 Id C1 T1 C3 U C1 U U d D4 T4 - D3 D5 V U - U UN iU e ~ ~ ~ W D6 C2 C4 D1 T5 C5 D1 U UN T1 D2 T3 U U N D3 C3 d ~ C1 + C5 T2 V ~ D2 W Ls eU Ls N ~ Last (Asynchronmotor) C6 T2 Kommutierungs-Ersatzschaltbild T6 Das Ersatzschaltbild gilt für den Umschaltvorgang von Ventil T1 auf T3: Ausgangszustand: Stromfluß vor dem Zünden von T3: Über T1 und D1 zur Last. Die Kondensatoren sind wie gezeichnet aufgeladen. Die Umschaltung von der Phase U auf Phase V wird eingeleitet durch Zünden des Thyristors T3 und erfolgt in mehreren Schritten: 1) Der erste Kommutierungsvorgang: Die negative Kondensatorspg. löscht T1. Die Geschwindigkeit dieses Kommutierungsvorgangs wird durch Cp(C1parallel zu C3+C5). und die hier nicht Ersatzschaltbild der Last (Asynchronmotor) gezeichneten Zuleitungs- bzw. Kondensatorinduktivitäten bestimmt. 2) Kondensatorumladung: Der Laststrom fließt durch die Kondensatoren und lädt sie bis auf die momentane Motorspannung um. 3) Die zweite Kommutierung: Wenn uC1 >uVU geworden ist, übernimmt D3 den Strom (Viertelperiode des Schwingkreises Cp und 2Ls). Durch die nachfolgenden Kommutierungen werden die Kondensatoren wieder umgeladen, so daß nach einem Zyklus das Ventil T1 wieder gelöscht werden kann. Ein-/Ausgangsgrößen des I-Umrichters bei motorischer Last: Eingangsleistung: Pd = U d I d ≈Motorleistung = Effektivwert d. Ausgangsstroms: IU = Effektivwert d. Grundschwingung: I1U = Ventilströme: I TAV 3U 1 M I1 M cosϕ 2 I d (Kommutierung vernachlässigt!) 3 6 I d = I1 M π ≈I FAV ≈I d / 3 I TRMS ≈I FRMS ≈I d / 3 Die erste Kommutierung (von T1 nach T3) geschieht bei praktisch konstanter Kondensatorspannung: i Id iu Motorströme t k 1 = I d * Lsc / U C max ωt Nach der ersten Kommutierung wird der Kondensator (Cp = 1,5*C) in der Zeitspanne ta von -UC max umgeladen, bis UC positiver wird als die momentane Induktionsspannung des Motors e(t) = eV - eU: ta = − U C max + e(t ) Id Mit ω 0 i T1 ωt * 1,5 C Die Resonanzfrequenz ω o und die Dämpfung d des während der 2. Kommutierung wirksamen Schwingkreises (2R; 2Ls; 1,5C) bestimmen im wesentlichen diesen Teil des Umschaltvorgangs. Bei motorischer Last wirkt während der Kommutierung nur der geringe Ständerwiderstand (d << 1) und der Kommutierungsvorgang wird in einer Viertelperiode des Kommutierungsschwingkreises ablaufen. Folgende Gleichungen bestimmen näherungsweise den 2. Kommutierungsvorgang: Umschwingfrequenz: ω r = i Ventilströme i T3 i ωt u eV eU ωt w 02 − d 2 = 1 / 2 Ls * 1,5C und Umschwingdauer : Induktionsspannungen des Motors d = R / Ls / 3C 2π 1 tk2 ≈ = 4ω r 4 f r tk u eV - e U Die Schonzeit für die Thyristoren wird durch die Umladung der Kondensatoren bestimmt. Die Kondensatorspannung liegt nach dem Ausschalten des Thyristors direkt an diesem. Sobald sie positiv wird, ist die Schonzeit abgelaufen: Schonzeit: ωt Spannung an Motor und Kondensator ta t s = 1,5 * C * U C max / I d Das Maximum der Induktionsspannung während der 2. Kommutierung tritt am Ende des Kommutierungsvorganges auf: Komm.spannung: ∆U C = I d 2 Ls 3C / 2 Die maximale Motorspannung ist gleich der Kondensatorspannung und setzt sich aus dem Scheitelwert der vom Motor induzierten Spannung und der während des 2. Kommutierungsvorgangs an den Motorinduktivitäten induzierten Spannung zusammen: U 1 M max = U C max = 2 (eV − eU ) + ∆U = 2U 1 M + ∆U u ts U T1 ωt Ventilspannung von T1 Die Phase ϕ zwischen Motorstrom und -spannung stellt sich nach der Belastung ein. Der Stromrichter, welcher die Zwischenkreisspannung bereitstellt (meist eine B6C-Schaltung), muß der aktuellen Lastsituation angepaßt sein. Bei Motorbetrieb speist der Eingangsgleichrichter Wirkleistung in den Zwischenkreis ein (dessen Steuerwinkel α ist < 90o), der I-Wechselrichter gibt sie weiter an den Motor. Beim Bremsbetrieb (Generatorbetrieb) liefert der Motor Wirkleistung in den Zwischenkreis zurück und der Eingangsgleichrichter speist sie ins Netz zurück (α > 90o). Motorbetrieb Leerlauf Generatorbetrieb Die Dimensionierung des I-Umrichters: 1. Schritt: Die maximale Thyristorsperrspannung muß größer sein als der Scheitelwert der Motorspannung + Kommutierungsspannung; z. B. U D ,RRM ≥ ( 2U 1 M + ∆U ) * k k = Sicherheitsfaktor Bei gegebenem Thyristor kann ∆U, bei gegebenem ∆U kann die Thyristorsperrspannung berechnet werden. 2. Schritt: Mit der Motorständerinduktivität kann der Kommutierungskondensator berechnet werden. Damit ist bereits die Schonzeit des Thyristors und die Umschwingfrequenz festgelegt. Da der Umschwingvorgang kürzer sein muß als die Länge eines Stromblocks (z. B. ta + tk2 < T/12) ist damit auch die max. Betriebsfrequenz f = 1/T gegeben. Es kann auch bei gegebener Betriebsfrequenz die Kondensatorgröße und danach die Thyristorspannung berechnet werden. 3. Schritt: Die Schonzeit des Thyristors muß kontrolliert werden. Gegebenenfalls muß der Kondensator vergrößert werden. Eigenschaften der I-Umrichter: Vorteile: Einfache Steuerung Nachteile: Beide Drehrichtungen möglich Rückspeisung in den Zwischenkreis möglich Strom nicht sinusförmig Stromrichter muß an die Maschine angepaßt werden Betrieb auf Frequenzen < 1kHz beschränkt Steuerung der Wechselrichter: Die Ausgangsspannung (bzw. der Strom) und die Ausgangsfrequenz müssen entsprechend den Anforderungen durch die Last (z. B. Drehstrom-Motor, Trafo) eingestellt werden. So ist für den häufig vorkommenden Fall für einen konstanten Magnetfluß das Verhältnis U/f konstant zu halten. Spannungs-/Stromänderung: • Amplitudensteuerung: Die Gleichspannung Ud (Gleichstrom Id) im Zwischenkreis wird über steuerbare Gleichrichter verändert. • Pulssteuerung: Mit einem Pulswechselrichter wird die Ausgangsamplitude durch Verändern der Sinusspannung im Komparator des Steuergenerators eingestellt. Frequenzänderung: Die Grundtaktfrequenz des Wechselrichters ist gleichzeitig auch die Ausgangsfrequenz. Die Schaltfrequenz muß entsprechend dem Taktverhältnis mit der Grundfrequenz verändert werden. Eine obere Grenze ist durch die Schaltverluste der Halbleiterschalter, beim I-Umrichter durch die Dauer des Umschwingvorganges gegeben.