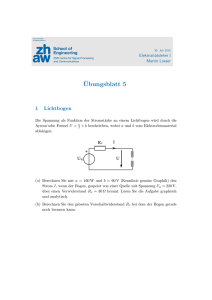
3. Gleichstrommotor - Drehmoment-Drehzahl
Werbung

1. Allgemeines .....................................................................................................................2 1.1. Verwendete Geräte .......................................................................................................... 2 1.2. M essgeräte:...................................................................................................................... 3 2. Asynchronmotor ............................................................................................................4 2.1. Aufgabenstellung............................................................................................................. 4 2.2. M essaufbau...................................................................................................................... 4 2.3. Vorgangsweise ................................................................................................................ 5 3. Gleichstrommotor - Drehmoment-Drehzahl-Kennlinie ............................8 3.1. Aufgabenstellung............................................................................................................. 8 3.2. M essschaltung / M essaufbau........................................................................................... 8 3.3. Vorgangsweise ................................................................................................................ 8 3.4. M essergebnis ................................................................................................................... 9 3.5. Diagramme .................................................................................................................... 10 3.6. Berechnung.................................................................................................................... 11 3.7. Diskussion..................................................................................................................... 11 4. Gleichstrommotor – Leerlaufkennlinie n = f(IE) ....................................... 12 4.1. Aufgabenstellung........................................................................................................... 12 4.2. Vorgangsweise .............................................................................................................. 12 4.3. M essschaltung / M essaufbau......................................................................................... 12 4.4. M essergebnis ................................................................................................................. 12 4.5. Diagramm ...................................................................................................................... 13 4.6. Diskussion..................................................................................................................... 13 -1- 1. Allgemeines 1.1. Verwendete Geräte Geräte-Platz 11 Schleifringläufer EW HOF VDE 0530/1284 UNI LINZ 31 000 000 5138 0000 HP 19910101 Typ L01-71L-DS2 No. 302288 Bauform B3; 50 Hz, cos = 0.78; 2850 U/min 22/380 V; 0,7/0,4 A; 0,1 kW Nebenschlussmaschine UNI LINZ 31 000 000 5139 0000 133100 HP 19910101 Nr. 2501 M agnetpulverbremse VDE 0530/1172 Nr. 304724; 2518 Bremse No. 0367 1,5 Nm; 3000 U/min; max. 6000 U/min Tachogenerator EW HOF VDE 05301172 L91-91-TD1G Nr. 286528 10 V / 15 W (max. 45W) Spannungsversorgung 3 Phasig Nr. 2291 Schalter dreipolig Nr. 2232 Steuergerät für M agnetpulverbremse Nr. 2518.1 3100 0000 5137 0000 19910101 Gleichspannungsversorgung 0 ... 250 V Nr. 2525 -2- 1.2. Messgeräte: M X 40: M X 47 Nr. 540-00/95 0006 Nr. 9124 4056 0504 Nr. 9133 4356 0028 Nr. 9124 4056 0516 Nr. 9240 4952 0135 Nr. 88052925 Nr. 88052918 Anmerkung: Während der M essung an der Gleichstrommaschine fielen die Batterien bei dem M ultimeter M X 47 88052918 aus. Leider können wir nicht den genauen Zeitpunkt festlegen, wann diese Umstände zu einer M essbeeinflussung geführt haben. -3- 2. Asynchronmotor 2.1. Aufgabenstellung Nehmen Sie die Drehmoment – Drehzahl – Kennlinie für jeweils drei verschiedene Widerstände auf (0 , 23,5 und 38,2 ). Dabei kann man die am Schaltpult integrierten Widerstände benützen. Wichtig ist dabei die Vorgangsweise, um nicht unnötige M essfehler in die Ergebnisse zu bekommen. Ergänzen Sie die folgende Tabelle für jeden dieser Widerstände und zeichnen Sie die Ergebnisse in ein Diagramm. RL -1 n min I A M V M Nm 2800 2600 2400 2200 2000 1750 1500 1250 1000 2.2. Messaufbau Die M agnetpulverbremse, hier in der Skizze rechts vom M otor ermöglicht eine genaue Kennlinienaufnahme, wobei dieses mit dem Tachogenerator zuerst verbunden werden muss. Zusätzlich müssen die Temperaturfühlereingänge des M otors mit dem Steuergerät verbunden -4- 500 sein. Der Betriebswahlschalter muss auf Regelung geschaltet werden und der Regelungswahlschalter auf n. Um das Steuergerät in Betrieb zu nehmen, muss zuerst der Sollwertpotentiometer auf Null stehen. Um die Temperaturfühlereingänge zu testen, kann man die Verbindung trennen und danach müssen beide roten LED ’s aufleuchten. Bevor man das Drehmoment messen kann, muss die Anzeige am M ultimeter durch Einstellen des Widerstands und des Kondensators angeglichen werden. Diese Spannung am M ultimeter soll sich im mV – Bereich finden. Zuletzt lassen Sie den Aufbau durch einen Tutor der Übungsleiter kontrollieren. 2.3. Vorgangsweise Nachdem Sie den M otor eingeschaltet haben, können Sie die Drehzahl mittels der Bremse regeln. Nun kann man das M oment und die Umdrehungen des M otors durch die am Steuergerät angehängten M ultimeter ablesen und in die M esstabelle eintragen. Da die Wicklungswiderstände bei M otoren meist sehr temperaturabhängig sind, sollte man erstens den M otor einige M inuten warm laufen lassen und danach die M essungen in möglichst gleichmäßiger Zeit durchführen. Zusätzlich muss zwischen den M essungen immer 30 Sekunden die M agnetpulverbremse ausgeschaltet werden. Auch die Reihenfolge der M essungen spielen eine große Rolle. Nehmen Sie die M esspunkte in der Reihenfolge 200 min-1 , 2800 min-1 , 1000 min-1 , 2600 min-1 ... auf. Stellen Sie dazu den Wert der Umdrehungen so genau wie möglich ein und messen Sie zum Schluss den Leerlauf. Dies soll für alle Widerstände wiederholt werden (0 , 23,5 und 38,2 ) 2.4. Messergebnis Das M oment in Newtonmeter kann man durch die Spannungsmessung am Steuergerät umrechnen. 1 Volt entspricht 0,15 Newtonmeter. Wie schon unter dem Punkt 2.2. M essaufbau erklärt, musste vor jeder M essung das M ultimeter abgeglichen werden. Leider schwankte dieser Wert während den M essungen sehr stark. Obwohl es zu Beginn auf meist weniger als 20mV eingestellt wurde, hatte es während der Betriebszeit gelegentlich einen Wert von 100 bis 200 mV. Leider konnte dieser M essfehler nicht in der Rechnung berücksichtigt werden, da dieser Wert nie genau bekannt war. Abgleich M O = 13.5 mV RL n min-1 2800 ntatsächlic min -1 2600 2400 2200 0 2000 2602 2402 2193 1750 1500 1250 1000 500 1246 1004 500 2948 2804 2000 1755 1495 0.373 0.564 0.736 0.899 1.023 1.26 1.244 1.344 1.423 1.505 8.20 8.15 h I A 0.32 M V 0.190 2.389 M Nm 4.95 6.50 7.42 8.08 0.029 0.358 0.743 0.975 1.113 1.212 1.23 M esstabelle für die M essergebnisse für 0 -5- 7.99 7.90 7.20 1.223 1.199 1.185 1.08 Abgleich M O = 41 mV (schwankte im Betrieb von 10 mV und 120 mV) RL 23.5 min -1 ntatsächlic min -1 n 2902 2800 2600 2400 2200 2000 1750 1500 1250 1000 500 2807 2606 2396 2200 2004 1748 1502 1250 1003 505 h I A 0.324 0.322 0.372 0.46 0.55 0.64 0.745 0.836 0.918 0.999 1.138 M V 0.155 0.795 3.7 4.7 5.85 6.85 7.28 7.75 8.11 8.60 M Nm 0.023 0.119 0.349 0.555 0.705 0.878 1.028 M esstabelle für die M essergebnisse für 23.5 1.09 1.163 1.127 1.29 2.33 Abgleich M O = 12.5 mV RL min -1 ntatsächlic min -1 n 38.2 2800 2600 2400 2200 2000 1750 1500 1250 1000 500 2873 2800 2603 2396 2205 1995 1750 1505 1251 997 497 h I A 0.326 0.32 0.35 0.4 0.46 0.535 0.62 0.695 0.77 0.84 0.96 M V 0.05 0.53 1.765 2.89 3.79 4.66 5.6 6.35 6.95 7.4 8.2 M Nm 0.008 0.079 0.265 0.434 0.569 0.699 0.84 0.953 1.043 M esstabelle für die M essergebnisse für 38.2 1.11 1.23 -6- 2.5. Diskussion Wie schon im Skript unter Punkt 6.2.5 erläutert wird das Kippmoment nach links verschoben, wenn ohmsche Widerstände an die Läuferwicklungen gehängt werden und diese dann in Stern geschalten werden. Je größer der Widerstand ist, desto weiter verschiebt sich die Kurve nach links, wie man an dem Beispiel oben erkennen kann. Bei keinem Widerstand kann man sofort das Kippmoment erkennen, da es sich ungefähr um 1750 Umdrehungen befindet. Dieses Verfahren wird meist beim Anfahren von M aschinen verwendet. Dort werden nach der Zeit die Widerstände verringert um immer möglichst ein starkes Drehmoment zu erreichen. Damit stimmt das Ergebnis mit den Erwartungen überein, dass die Drehmomentkurven bei steigenden ohmschen Widerstand immer weiter nach links verschoben werden. -7- 3. Gleichstrommotor Drehmoment-Drehzahl-Kennlinie 3.1. Aufgabenstellung Bauen Sie die Schaltung entsprechend Skript-Abbildung 6.24 auf. (siehe ebenfalls Pkt. M essaufbau) Flanschen Sie dabei die M agnetpulverbremse links und den Tachogenerator rechts am M otor an. Für den Anschluss und die Funktionsprüfung des Steuergerätes gilt dasselbe wie bei der Asynchronmaschine. M essen Sie bei verschiedenen Drehzahlen (Leerlaufdrehzahl, nächste durch 50 teilbare Drehzahl und weiter in 50er Schritten). Beachten Sie dabei folgende Grenzen: 1) Bremsen Sie -1 den M otor nicht unter 1300 min 2) Der Ankerstrom darf 1,1 A nicht überstiegen. M essen Sie anschließend den Erregerstrom ohne und mit dem 400 Widerstand. Nehmen Sie dann wieder die M-n-Kennlinie mit dem 400 Widerstand im Erregerkreis auf. Zeichnen Sie die Kennlinien M(n), (n) 3.2. Messschaltung / Messaufbau 3.3. Vorgangsweise Aufbau: Umbau der M essschaltung aus der M essung mit der Asynchronmaschine. (M essaufbau lt. Schaltung) Ersetzten der Asynchronmaschine durch die Gleichstrommaschine, Anflanschen von Tachogenerator und M agnetpulverbremse. Bei Beschalten mit Gleichspannungsversorgung, -8- beachten, dass Spannungsregler auf Linksanschlag steht (0)! Für die Einstellungen am Steuergerät gilt dasselbe wie für den M essaufbau der Asynchronmaschine. Temperaturfühler, Kopplung mit M agnetpulverbremse, justieren der Ausgangsspannung (M oment) auf minimalen Wert. Funktionsprüfung. Aufnahme: Warmlauf, Festlegung der zu messenden Drehzahlen, beginnen der M essung bei der höchsten, Leerlaufdrehzahl am Ende. 3.4. Messergebnis Drehmoment-Drehzahl Kennlinie für RE = 0 : M0 = 27,0 mV min-1 A V Nm W W % V A V nist IAnker M M PEl PMech UAnker IErreger UErreger 1580 0,085 0,045 0,007 33,10 1,12 3,4% 220,2 0,07 205,5 1548 0,138 0,44 0,066 45,22 10,70 23,7% 220,5 0,072 205,4 1500 0,25 1,37 0,206 69,49 32,28 46,5% 220,6 0,07 204,9 Drehmoment-Drehzahl Kennlinie für RE = 400 nist IAnker M M PEl PMech UAnker IErreger UErreger -1 min A V Nm W W % V A V 1672 0,09 0,015 0,00 31,42 0,39 1,3% 220,8 1651 0,14 0,37 0,06 42,45 9,60 22,6% 220,7 1601 0,23 1,05 0,16 62,20 26,41 42,5% 220,2 1447 0,35 2,24 0,336 91,76 50,91 55,5% 221 0,07 205,8 1351 0,58 3,92 0,588 142,46 83,19 58,4% 220,8 0,07 205,6 1300 0,69 4,7 0,705 166,45 95,98 57,7% 220,4 0,07 205,4 : M0 = 15,2 mV 1550 0,34 1,91 0,29 86,45 46,50 53,8% 220,3 -9- 1401 0,44 2,97 0,446 111,50 65,36 58,6% 220,4 0,071 204,5 1502 0,43 2,58 0,39 106,28 60,87 57,3% 220,3 0,064 180,5 1450 0,54 3,3 0,50 130,51 75,16 57,6% 220,3 1401 0,65 4,02 0,60 155,07 88,47 57,0% 220,8 1349 0,77 4,66 0,70 181,72 98,75 54,3% 221 1302 0,87 5,15 0,77 202,60 105,33 52,0% 219,6 3.5. Diagramme Drehmoment - Drehzahl - Kennlinie M (n ) - Kennlinie 0,90 0,80 0,70 M in Nm 0,60 0,50 0,40 0,30 0,20 0,10 0,00 1250 1300 1350 1400 1450 1500 n in (1 / min) Moment R = 400 Ohm 1550 1600 1650 1700 Moment R = 0 Wirkungsgrad - Drehzahl - Kennlinie (n ) - Kennlinie 70,0% Wirkungsgrad in % 60,0% 50,0% 40,0% 30,0% 20,0% 10,0% 0,0% 1300 1350 1400 Wirkungsgrad R = 400 Ohm 1450 1500 1550 n in (1 / min) Wirkungsgrad R = 0 Ohm - 10 - 1600 1650 1700 3.6. Berechnung -1 Es wird hier nur die Berechnung für den Fall R = 0, n = 1300 min gezeigt. Andere Werte analog. Spannung-Drehmoment Steuergerät : allgemein: M in Nm = M in V · 0,15 Nm / V -1 Für M esswert n = 1300 min M1300 = 4,7 · 0,15 Nm / V = 0,705 Nm Aufgenommene elektrische Leistung PEl : PEl = UAnker · IAnker + UErreger · IErreger PEl 1300 = 220,4 V · 0,69 A + 205,4 V · 0,07 A = 166,5 W Abgegebene mechanische Leistung PMech : PMech = M ·( n) / 30 P Mech 1300 = 0,705 Nm · ( Wirkungsgrad : = PMech / PEl 1300 1300 min-1) / 30 = 96 W = PMech 1300 / PEl 1300 = 96 W / 166,5 W = 0,577 57,7 % 3.7. Diskussion Die Tabellenwerte sind die abgelesenen Werte ohne Berücksichtigung der Offsetspannung des Steuergerätes für M oment-M essung, da die Werte während der M essung ständig schwankten. Größenordnung bis ca. 100 mV. Da Offsetspannung im mV-Bereich somit unberücksichtigt. Es wurde als Grundeinstellung eine möglichst geringe Offsetspannung eingestellt. Bei der Drehmoment-Drehzahlkennlinie ist linearer Zusammenhang Drehmoment-Drehzahl deutlich ersichtlich. Ein höherer Widerstand bewirkt eine Schwächung des Feldes und somit eine höhere Drehzahl. Der max. erreichbare Wirkungsgrad sinkt mit höherem Vorwiderstand. Die Kennlinien verschieben sich jedoch aufgrund des veränderten Drehzahlbezuges. An der unteren Drehzahlgrenze (1300 min-1) wird der Wirkungsgradunterschied deutlich. Der M omentverlauf bei höherem Vorwiderstand verläuft flacher. - 11 - 4. Gleichstrommotor – Leerlaufkennlinie n = f(IE) 4.1. Aufgabenstellung Prinzipieller Aufbau wie Pkt. Drehmoment-Drehzahlkennlinie Gleichstrommotor jedoch mit: Kuppeln Sie die M agnetpulverbremse vom M aschinensatz ab. M essen Sie nun für 4 verschiedene Erregerkreiswiderstände (RE = 0, 200, 400 und 600 ) jeweils Leerlaufdrehzahl, Ankerstrom und Erregerstrom bei UA = 220 V. Zeichen Sie im Protokoll n = f(IE) Zeichnen Sie die Kennlinie nLeerlauf(IE) 4.2. Vorgangsweise Aufbau analog Pkt.3, jedoch ohne M agnetpulverbremse. M essungen im Leerlauf. 4.3. Messschaltung / Messaufbau Widerstand in Serie zur Erregerwicklung 4.4. Messergebnis R nist IAnker IErreger UAnker UErreger min A A V V -1 0 1575 0,08 0,07 220,3 205,9 200 1630 0,08 0,07 220,1 192,3 - 12 - 400 1690 0,08 0,06 219,8 180,6 600 1750 0,08 0,06 219,7 170,5 4.5. Diagramm Leerlauf - Kennlinie Drehzahl n ( Erregerstrom I ) - Kennlinie Drehzahl n in (1 / min) 1800 1750 1700 1650 1600 1550 1500 0,0550 0,0570 0,0590 0,0610 0,0630 0,0650 0,0670 0,0690 0,0710 0,0730 Erregerstrom I in A 4.6. Diskussion Interessant ist der lineare Zusammenhang zwischen Erregerstrom und Leerlaufdrehzahl. Es ist aus den M essdaten (Tabellenwerten) ersichtlich, das bei steigendem Erregerwiderstand die Spannung und der Strom an der Erregerwicklung deutlich sinkt. Jedoch steigt der Strom am Anker, bei annähernd gleich gehaltener Spannung leicht an. Je größer der Erregerwiderstand, desto geringer Strom und Spannung am Erreger und steigende Drehzahl. Bei steigendem Erregerwiderstand sinkt Strom und Spannung in der Erregerwicklung. Es wird somit das M agnetfeld abgeschwächt. Aus Gleichung Skript (6.9) ist ersichtlich, das bei sinkendem die Drehzahl steigt. Eine Feldschwächung bewirkt Drehzahlerhöhung. - 13 -