Vorlesung Teil 1
Werbung

Schaltungen & Systeme
Prof. Dr. P. Pogatzki
Vorlesung an der
FH-Düsseldorf
Schaltungen & Systeme
2
1. Einleitung
2. Lineare Netzwerke
2.1 Einleitung
2.2 Kleinsignalparameter elektrischer Netzwerke
2.2.1
Y-Parameter
2.2.2
Weitere Kleinsignalparameter
3. Nichtlineare Netzwerke
3.1 Einton-Anregung nichtlinearer Netzwerke
3.2 Mehrton-Anregung nichtlinearer Netzwerke
3.3 Linearisierung und Arbeitspunkt
4. Rückkopplung
4.1 Mögliche Varianten der Gegenkopplung
4.2 Vergleich von Strom- und Spannungsgegenkopplung
4.3 Verstärkungs-Bandbreite-Produkt
4.4 Stabilität rückgekoppelter Systeme
5. Stromquellen und Stromspiegel
5.1 Einfache Stromquellen
5.2 Einfache Stromspiegel
5.3 Widlar-Stromspiegel
5.4 Stromspiegel in Kaskoden-Schaltung
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
3
6. Differenzverstärker
6.1 Differenzverstärker mit Bipolar-Transistoren
6.2 Gegenkopplung von Differenzverstärkern
6.3 Differenzverstärker mit aktiver Last
6.4 Der Gilbert-Modulator
7. Operationsverstärker
7.1 Grundlagen
7.2 Stabilität von Operationsverstärkern
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
4
Wichtiger Hinweis oder Lernen ist Iterieren:
Es ist selten möglich, alles direkt in der Vorlesung zu begreifen. Das schaffen normalerweise
auch die Dozenten nicht, wenn sie den Vortrag eines Kollegen hören. Dies ist also keine
Schande, und man darf von einem Vortragenden auch nicht das vollständige Beibringen des
Lehrstoffes erwarten. Die Vorlesung ist nur der erste Schritt zum Begreifen des Stoffes. Viele
Iterationen sind notwendig, um den Stoff in die Tiefe gehend und in allen Zusammenhängen
zu erlernen.
Eine sehr erfolgreiche Strategie ist es, die erste Iteration (Wiederholung) kurz nach der
Vorlesung zu realisieren. Diese Iteration sollte auch zur Verbesserung Ihrer Notizen aus der
Vorlesung führen. Alle Unklarheiten sollten formuliert werden. Die nächste Iteration sollte
eine Diskussion über das Thema mit einem Mitstudierenden sein. Unterschiedliche Ansichten
bringen dann meistens einen großen Fortschritt in dem Verständnis des Stoffes.
Die verbliebenen Unklarheiten sollten dann in den Übungen oder Sprechstunden
angesprochen werden.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
5
Bewährte Regeln für gemeinsames Arbeiten,
Besprechungen usw.
→ gilt auch für diese Vorlesung:
Pünktlichkeit (Vorlesungsbeginn, Pausenende)
Anwesenheit: von Körper
Anzahl gleichzeitig redender Personen ≤ 1
Konzentration auf das Geschehen
Keine private Internetnutzung während der Vorlesung mit Laptops
Mobilstationen (Handys) ausschalten, keine Telefonate
ggf. Feedback zum Arbeitsprozeß:
+ Geist
Stoff zu schnell / zu langsam? Pausenbedarf?
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
1-1
Einleitung
1 Einleitung
Das Fach „Schaltungen und Systemen“ soll sowohl eine Einführung in das Design elektronischer Schaltungen sein als auch ein grundlegendes Verständnis für die Arbeitsweise gängiger
CAD-Tools vermitteln.
Die Entwicklung elektronischer Schaltkreise führte in der Vergangenheit weg von diskreten
Systemen konsequent hin zu hochintegrierten Schaltungen (IC’s, Integrated Circuits). Dabei
eröffnen neue Technologien wie BiCMOS (Bipolar-Transistoren und MOS-Transistoren gemeinsam auf einem Chip) vielfältige Möglichkeiten, sowohl für den Schaltungsentwickler auf
Systemebene als auch für den Entwickler der IC’s selbst.
Während der Anwender der integrierten Schaltungen „lediglich“ Kenntnisse über deren Wirkungsweise bzw. technischen Daten haben muß, spielt sich die „klassische“ Schaltungstechnik mit Einzeltransistoren heute nahezu nur noch auf IC-Ebene ab. D. h., der IC-Entwickler
arbeitet ausschließlich auf Transistorebene unter Anwendung verschiedener CAD-Tools für
Design, Optimierung und Layout. Die Entwicklung diskreter Schaltungen auf Transistorebene
findet aufgrund der Kosten, eingeschränkter Reproduzierbarkeit, begrenzter Flexibilität und
Größe der Platine praktisch nicht mehr statt. Dieses gilt mittlerweile bis hin zu Frequenzen in
den oberen GHz-Bereich (bis etwa 60 GHz). Die entsprechenden Schaltungen bestehen in der
Regel aus GaAs-FET’s und werden dann als MMIC’s (Microwave Monolithic Integrated
Circuit) bezeichnet. Lediglich bei kleinen Stückzahlen und „kleinen“ HF-Frequenzen bis etwa
10 GHz werden noch diskrete Schaltungen entwickelt.
R
R10
R=400 Ohm
Port
Bias
Num
R
R11
R=800 Ohm
BJT_NPN
BJT9
Model=BJTM4
Area=1
Region=
R
R8
R=400 Ohm
BJT_NPN
BJT10
Model=BJTM3
Area=1
Region=
R
R12
R=700 Ohm
R
R7
R=100 Ohm
Port
LO_PORT
Num=4
C
C4
C=1 uF
BJT_NPN
BJT7
Model=BJTM1
Area=1
Region=
L
L2
L=0.5 nH
R=
R
R3
R=50 Ohm
BJT_NPN
BJT5
Model=BJTM1
Area=1
Region=
C
C3
C=1.0 uF
R
R9
R=100 Ohm
BJT_NPN
BJT6
Model=BJTM1
Area=1
Region=
C
C1
C=1 uF
L
L1
L=0.5 nH
R=
BJT_NPN
BJT4
Model=BJTM2
Area=1
Region=
C
C2
C=1 uF
BJT_NPN
BJT12
Model=BJTM3
Area=1
Region=
R
R6
R=20 Ohm
BJT_NPN
BJT2
Model=BJTM3
Area=1
Region=
R
R4
R=170 Ohm
Port
IF_port
Num=3
R
R13
R=500 Ohm
R
R2
R=50 Ohm
BJT_NPN
BJT3
Model=BJTM2
Area=1
Region=
L
L3
L=0.5 nH
R=
C
C5
C=1 uF
BJT_NPN
BJT11
Model=BJTM3
Area=1
Region=
R
R1
R=50 Ohm
Port
RF_port
Num=1
BJT_NPN
BJT8
Model=BJTM1
Area=1
Region=
BJT_NPN
BJT1
Model=BJTM3
Area=1
Region=
BJT_NPN
BJT14
Model=BJTM5
Area=1
Region=
R
R5
R=170 Ohm
R
R17
R=45 Ohm
BJT_NPN
BJT13
Model=BJTM3
Area=1
Region=
R
R15
R=1000 Ohm
R
R14
R=200 Ohm
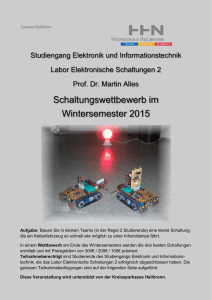
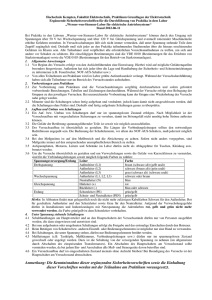
Bild 1-1: Schematic Entry auf Transistorebene für einen Mischer (Gilbert Modulator) mit
Agilent- ADS
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Prof. Dr. P. Pogatzki 2012
Using the Other=SaveToDataset=no syntax forces only
data in measurement equations to be output to the
dataset. (Edit the Envelope simulation controller,
select the Display tab, and display "Other".) This
reduces dataset sizes by as much as 30:1. This
technique is not recommended if a very large number
of time points is simulated, because all the data is
kept in RAM before the measurement equations are
calculated, and this can slow down the outputting
of data to the dataset.
This voltage source is just
a "trick" to pass a variable
defined in a VAR block into
the dataset (via the measurement
equation for Pinput, above.)
Out
V_DC
SRC1
Vdc=AmpPin
QPSKsource
X2
SymbolRate=SymbolRate
RF_pwr_dBm=AmpPin
RFfreq=RFfreq
Alpha=0.2
QPSK
Src
MeasEqn
meas1
AMdemodOutV=real(AMdemodOut[0])
IFoutV=mag(mix(IFout,{-1,1}))
IntegratorOut=real(IntegOut[0])
AmpOutV=mix(AmpOut,{0,1})
Pinput=real(AmpPinData[0])
VAR
VAR2
SymbolRate=(1.23 MHz)/2
tstep=1/(10*SymbolRate)
RFfreq=900 MHz
LOfreq=800 MHz
Envelope
Env2
MaxOrder=4
Freq[1]=LOfreq
Freq[2]=RFfreq
Order[1]=5
Order[2]=5
Stop=t7
Step=tstep
Other=SaveToDataset=no
The input power is stepped,
and the loop acts to force the
IF output voltage level to
be constant at 1 V.
Automatic Gain Control
Loop Simulation, with
single downconversion
and QPSK input signal.
Set input signal power levels here.
OpAmpIdeal
AMP2
Gain=100000
Freq3db=
Delay=0. sec
C
C1
C=50 pF
ResetSwitch
SWITCH2
P_1Tone
PORT1
Num=1
Z=50 Ohm
P=dbmtow(0)
Freq=LOfreq
VAR
VAR1
trise=20*tstep
tdwell=20/SymbolRate
tdelay=5/SymbolRate
t1=tdelay
t2=tdelay+trise
t3=tdelay+trise+tdwell
t4=tdelay+2*trise+tdwell
t5=tdelay+2*(trise+tdwell)
t6=tdelay+3*trise+2*tdwell
t7=tdelay+3*(trise+tdwell)
AmpPin=pwl(time,0 ns,0, t1, 0, t2, 5, t3, 5, t4, 10, t5,10, t6, 15, t7,15)
AmplifierVC
AMP1
Gain=(10*_v3)
Rout=50 Ohm
Mixer
MIX1
SideBand=BOTH
ImageRej=
LO_Rej1=
LO_Rej2=
RF_Rej=
ConvGain=dbpolar(-8,0)
S11=polar(0,0)
S22=0+j*0
S33=0.
R
R3
R=100 Ohm
R
R2
R=100 Ohm
R
R1
R=50 Ohm
V_DC
SRC2
Vdc=1 V
AM_DemodTuned
DEMOD1
Fnom=RFfreq-LOfreq
Rout=5 Ohm
Schaltungen & Systeme
Einleitung
1-2
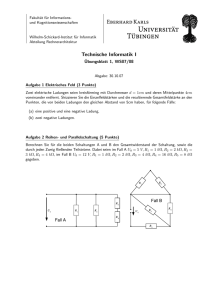
Bild 1-2: Schematic Entry zur Systemsimulation einer automatischen Verstärkungsregelung
mit Agilent-ADS
FH-Düsseldorf
Schaltungen & Systeme
Einleitung
1-3
Betrachtet man beispielsweise die rasante Entwicklung im Mobilfunk, so ist eine Tendenz zu
immer kürzeren Entwicklungszeiten zu erkennen. Dieses ist nur durch den Einsatz von CAD
zu erreichen. Die Verwendung von CAD entbindet den Entwickler zwar von der Notwendigkeit, bestimmte Berechnungen selbst durchzuführen, CAD nimmt dem Ingenieur jedoch nicht
Denkarbeit ab und erfordert weiter die volle Kreativität.
Damit ist auch heute ein Verständnis für die Funktionsweise sowohl der verwendeten Bauelemente als auch der eingesetzten Schaltungen unbedingt notwendig.
Moderne Simulatoren erlauben ein komplexes System zunächst mit idealen Elementen zu
untersuchen und diese dann Schritt für Schritt durch reale Schaltkreise bestehend aus Transistoren Widerständen, Kapazität, etc. zu ersetzten. Verläßt man die Ebene der reinen und idealen Systemsimulation, sind Kenntnisse der Schaltungstechnik unumgänglich. Um die Ergebnisse einer Simulation bewerten zu können, muß sich der Schaltungsentwickler zu jedem
Zeitpunkt über die Funktionsweise des Simulators und über dessen Grenzen hinsichtlich Genauigkeit und Modellierung der Bauelemente im Klaren sein. Ist er das nicht, so sind böse
Überraschungen bei der Realisierung vorprogrammiert.
Inhalt dieser Vorlesung ist es, zunächst ein Verständnis für die Simulation linearer Schaltungen zu vermitteln.
In den weiteren Kapiteln werden dann die Funktionsweise verschiedener elementarer Grundschaltungen wie Stromspiegel, Differenzverstärker, mehrstufige Verstärker etc. besprochen.
Im Abschluß sollen dann einige Schaltungen mit Operationsverstärkern sowie deren Eigenschaften analysiert werden.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
2
Lineare Netzwerke
2-1
Lineare Netzwerke
2.1 Einleitung
Systeme lassen sich mathematisch besonders dann einfach beschreiben, wenn sie linear und
zeitinvariant sind. Diese Systeme werden als LTI-Systeme (Linear Time Invariant System)
bezeichnet. Es gelten für ein derartiges LTI-System die folgenden Eigenschaften:
Bild 2-1: Grundsätzliche Struktur eines System: Eingangsgröße s(t), Abbildung F{s(t) und
Ausgangsgröße g(t)als Funktion der Zeit t
Die Eingangsgröße s1(t) erzeuge die Ausgangsgröße g1(t)
Die Eingangsgröße s2(t) erzeuge die Ausgangsgröße g2(t)
s1(t) g1(t)
s2(t) g2(t)
Dann erzeugt eine beliebige Linearkombination aus s1(t) und s2(t) die entsprechende Linearkombination der Ausgangsgrößen mit
a1 s1 (t) a2 s2 (t) a1 g1 (t) a2 g 2 (t)
(2-1)
mit a1, a2 R.
Ferner gilt für ein LTI-System, daß ein in der Zeit verschobenes Eingangssignal ein in der
Zeit gleichermaßen verschobenes Ausgangssignal bewirkt.
a1 s1 (t-τ) a1 g1 (t-τ)
(2-2)
Das Verhalten des Systems ist also unabhängig davon, wann eine Eingangsgröße angelegt
wird.
Das Ausgangssignal kann mittels des Faltungsintegrals berechnet werden. Dabei wird h(t) als
Stoßantwort bezeichnet und ist die Reaktion des LTI-Systems auf Anregung mit einem DiracStoß.
Bild 2-2: Stoßantwort h(t) als Ergebnis der Anregung mit einem Dirac-Stoß (t)
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-2
Dabei ist der Dirac-Stoß wie folgt definiert:
0
t0
δ( t )
nicht definiert t 0
(2-3)
δ(t ) dt 1
Der Dirac-Stoß kann in seiner Fläche und seiner Position variiert werden.
Bild 2-3: Darstellung eines Dirac-Stoßes an der Stelle T mit Angabe der Fläche (hier „a“)
Für das Faltungsintegral gilt dann:
g (t ) s (τ) h(t τ) dτ
(2-4)
j 2 ft
angeregt, so wird das Eingangssignal lediglich mit einem
Wird das LTI-System mit e
komplexen Faktor multipliziert. Die Form (sin bzw. cos) bleibt erhalten. Der Faktor H wird
als Übertragungsfunktion bezeichnet und definiert sich wie folgt:
H f e j 2 f h t dt
(2-5)
H hängt dabei nur von der Stoßantwort des Systems und von der jeweiligen Frequenz f ab!
Obige Beziehung entspricht aber dem aus der Mathematik bekanntem Fourier-Integral.
Es gilt allgemein für die Fourier-Transformation:
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
Hf
e
j 2 ft
2-3
h t dt
h t
e
j 2 ft
(2-6)
H f df
Die Übertragungsfunktion ergibt sich damit als Fourier-Transformierte der Stoßantwort bzw.
kann die Stoßantwort bei bekannter Übertragungsfunktion mittels der inversen FourierTransformation bestimmt werden. Damit aber sind beide Darstellungen äquivalent. Es ergeben sich folgende Zusammenhänge für die komplexen Signale bzw. Spektren:
Zeitbereich
Time Domain
s(t), h(t), g(t)
g t
Spektralbereich (Frequenzbereich)
Frequency Domain
S(f), H(f), G(f)
s τ h t τ d
g t s t
h t
G f S f H f
Beschreibt
die Faltung
Fourier-Transformation
Inverse Fourier-Transformation
Aus dem u. U. schwierig zu bestimmenden Faltungsintegral wird im Spektralbereich (Frequenzbereich) eine einfach auszuführende Multiplikation. Aus diesem Grund haben die harmonischen Funktionen sin und cos sowie die komplexe Wechselstromrechnung eine derartige
herausragende Bedeutung. Die Zusammenhänge in obiger Tabelle gelten nur (!) für LTISysteme, nichtlineare Systeme (alle realen Systeme weichen von der Idealisierung LTISystem mehr oder weniger ab) können so nur näherungsweise oder überhaupt nicht beschrieben werden. Aufgrund der einfachen mathematischen Beschreibung der LTI-Systeme wird
jedoch immer versucht, reale nichtlineare Systeme auf lineare Systeme zurückzuführen, sofern dieses ohne großen Informationsverlust möglich ist.
Bild 2-4: Links: Testschaltung zur Bestimmung des Systemverhalten im Zeitbereich,
rechts: Testschaltung zur Bestimmung des Systemverhalten im Frequenzbereich
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-4
2.2 Kleinsignalparameter elektrischer Netzwerke
Im vorherigen Abschnitt wurden Ein- und Ausgangssignale eher als abstrakte funktionale
Zusammenhänge betrachtet. Die gewonnenen Erkenntnisse sollen nun auf elektrische Netzwerke übertragen werden, um eine systematische und allgemeine Beschreibung der Eigenschaften zu gewährleisten. Auf den in diesem Abschnitt gemachten Überlegungen basieren
alle etablierten CAD-Tools zur Analyse linearer elektrischer Netzwerke. Den Y-Parametern
kommt dabei eine überragende Rolle zu.
In der Regel sind die in den folgenden Abschnitten und Kapiteln verwendeten Größen (Ströme, Spannungen, Impedanzen, Admittanzen, etc.) immer komplex ohne daß dieses besonders
gekennzeichnet wird. Beispiel:
Z R jX
Y G jB
j 2 1
(2-7)
beschreibt die komplexe Impedanz Z bzw. die komplexe Admittanz Y. Hingegen hat
Z R2 X 2
(2-8)
die Bedeutung des Betrages der komplexen Impedanz Z.
2.2.1 Y-Parameter
Für die folgenden Betrachtungen wird zunächst mit einer möglichst einfachen Struktur begonnen.
Bild 2-5: Testschaltung zur Bestimmung von Ein- (Spannung) und Ausgangsgröße (Strom)
Es gilt:
I Y U
(2-9)
Werden Strom als Ausgangs- und Spannung als Eingangsgröße betrachtet, so ergibt sich für
die Übertragungsfunktion H(f):
H( f ) Y
Prof. Dr. P. Pogatzki 2012
(2-10)
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-5
Diese ist damit direkt gleich dem komplexen Leitwert Y!
Die Schaltung aus Bild 2-5 wird nun durch eine zweite Spannungsquelle erweitert.
Bild 2-6: Testschaltung zur Bestimmung von Ein- (Spannungen) und Ausgangsgrößen (Ströme)
Es wird vereinbart, daß alle Ströme in das Netzwerk hinein fließen, um eine einheitliche
Zählweise zu garantieren. Werden nun wieder die Ströme als Ausgangs- und die Spannungen
als Eingangsgrößen betrachtet, so ergibt sich:
I1 U1 U 2 Y Y U1 Y U 2
I 2 U 2 U1 Y Y U1 Y U 2
(2-11)
Es können also zwei Gleichungen für die Ströme aufgestellt werden. Eine elegantere Darstellung ist die folgende Matrixschreibweise.
I1 Y
I 2 Y
Y U1
Y U 2
(2-12)
Bzw. gilt vereinfacht:
I Y U
(2-13)
Die einzelnen Vektoren bzw. die Matrix (Y) bestimmt sich zu:
I
I 1
I2
U
U 1
U 2
(2-14)
Y11 Y12 Y
Y
Y
21 22 Y
Y
Prof. Dr. P. Pogatzki 2012
Y
Y
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-6
Die Matrix (Y) wird als Admittanz-Matrix oder auch vereinfachend nur Als Y-Matrix bezeichnet. In der Schaltung aus Bild 2-6 fehlt die Angabe eines gemeinsamen Bezugspotentials, kurz „Masse“ genannt. Eine Y-Matrix, die eine derartige Schaltung beschreibt, wird als
schwebende Matrix bezeichnet. Die entsprechende Schaltung zeigt immer die Eigenschaft,
daß die Summe aller Ströme, die in das Netzwerk fließen, den Wert Null hat.
Betrachtet man nun die Struktur der Matrix aus Gleichung (2-12), so sind auf Anhieb einige
wichtige Eigenschaften zu erkennen. Die folgenden Aussagen gelten für alle Matrizen, die
keine Quellen enthalten, die Anzahl der Knoten sei im nun weiter betrachteten allgemeinen
Fall n.
Alle Zeilensummen einer schwebenden n×n-Y-Matrix sind Null
n
Y
i 1
ki
0
für alle k
(2-15)
Ausgehend von dem Beispiel in Bild 2-7 können folgende Überlegungen angestellt werden:
Zwischen zwei beliebigen Knoten k,i des Netzwerkes befinde sich die Admittanz Yki . D. h.,
alle Knoten des Netzwerkes sind miteinander über Admittanzen verbunden. Aus Gründen der
Übersicht sind im folgenden Bild lediglich die Verbindungen des Knoten k mit den anderen
Knoten dargestellt.
Bild 2-7: Testschaltung zur Bestimmung des Stromes Ik
Der Strom in den Knoten k bestimmt sich als Summe der Ströme durch alle Admittanzen Yki
zu
Ik
Prof. Dr. P. Pogatzki 2012
Y U
i ,i k
ki
k
Ui
(2-16)
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-7
Sind nun die Potentiale an allen Knoten i gleich dem Potential am Knoten k, so ergibt sich für
den Strom der Wert Null für jeden Zweig des Netzwerkes. Damit ist aber auch die Summe
aller Zweigströme I k Null. Wird diese Erkenntnis auf das Matrizenprodukt angewendet, so
ergibt sich:
I k Yki U i Yki U k U k Yki 0
i
i
(2-17)
i
Für beliebige U k 0 muß also die Zeilensumme der Y-Matrix Null sein.
Alle Spaltensummen einer schwebenden n×n -Y-Matrix sind Null
n
Y
i 1
ik
0
für alle k
(2-18)
Um diese Beziehung herzuleiten, wird ohne Beschränkung der Allgemeinheit angenommen,
daß mit Ausnahme des Knoten 1 alle Knoten das Potential Null aufweisen. Ausgehend von
I1 Y11 Y12
I 2 Y21 Y22
I
I n Yn1 Yn 2
Y1n U1
Y2 n U 2
Ynn U n
(2-19)
Y1n U1 Y11 U1
Y2 n 0 Y21 U1
Ynn 0 Yn1 U1
(2-20)
ergibt sich für den Vektor der Ströme:
I1 Y11 Y12
I 2 Y21 Y22
I
I n Yn1 Yn 2
Da die Summe aller Ströme wieder den Wert Null ergibt, gilt:
n
I
k 1
n
k
n
0 Yk1 U1 U1 Yk1
k 1
(2-21)
k 1
Damit aber ist Summe der ersten für beliebige U1 Spalte Null. Obige Überlegungen können
analog auch für alle weiteren Spalten angestellt werden, auch hier gilt, daß die Spaltensumme
immer den Wert Null ergibt.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-8
Eine schwebende Y-Matrix ist singulär, d. h. sie ist nicht invertierbar
det Y 0
(2-22)
Aufgrund der Eigenschaft, daß die Spaltensumme bzw. Zeilensumme Null ist, ist immer eine
Zeile bzw. eine Spalte eine Linearkombination der restlichen Zeilen bzw. Spalten. Damit ist
der Rang einer schwebenden Y-Matrix n-1 und somit gilt obige Beziehung. Damit eine Matrix invertiert werden kann, muß jedoch die Determinante ungleich Null sein.
Reziprozität
Unter Reziprozität wird der folgende Zusammenhang verstanden.
Yki Yik
(2-23)
Jedes lineare elektrische Netzwerk, daß keine gesteuerten Quellen enthält, ist reziprok. (Spezielle Bauelemente der HF-Technik wie Zirkulatoren oder Richtungsleiter sollen hier nicht
betrachtet werden). In diesem Fall enthält das Netzwerk nur R, L, C-Komponenten. Man bezeichnet ein derartiges Netzwerk auch als passiv. Wie bereits besprochen, beschreibt das Matrix-Element Yki die Admittanz Y zwischen den Knoten i und k des Netzwerkes. Befinden sich
jedoch zwischen diesen Knoten nur passive Elemente, so ist keine Richtungsabhängigkeit
gegeben. Damit ist das Netzwerk reziprok.
Bild 2-8: Beispielschaltung für ein passives Dreitor bestehend aus Widerständen, Kondensatoren und Spulen, ein gemeinsames Bezugspotential (Masse) ist nicht definiert, das
Element
stellt einen Widerstand dar
Diese Eigenschaften sollen nun für die Beispielschaltung in Bild 2-8: Beispielschaltung für
ein passives Dreitor bestehend aus Widerständen, Kondensatoren und Spulen, ein gemeinsames Bezugspotential (Masse) ist nicht definiert, das Element
stellt einen Widerstand dar diskutiert werden.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-9
Gegeben ist ein passives Dreitor, welches insgesamt 4 Knoten enthält. Das Schaltbild wurde
mit dem CAD-Tool ADS (Advanced Design System) der Firma Agilent Technologies erstellt
und anschließend für den Frequenzbereich 1...10 GHz simuliert. Da nur das Verhalten der
Schaltung bzgl. der äußeren Klemmen (in diesem Fall die Knoten 1...3) interessiert, tritt der
innere Knoten 4 in den Ergebnissen nicht mehr in Erscheinung. Die Simulationsergebnisse für
einige Y-Parameter sind in der komplexen Ebene in Bild 2-9 dargestellt. Der Verlauf von Y11
ergibt sich beispielsweise aus der Überlegung, daß für niedrige Frequenzen L1 als Kurzschluß
und C1 als Leerlauf angesehen werden kann. Damit ergibt sich Y11 aus der Parallelschaltung
von R1 und R2. Für hohe Frequenzen kann L1 als Leerlauf und C1 als Kurzschluß verstanden
werden. Somit bestimmt sich Y11 wieder aus der Parallelschaltung von R1 mit R2.
y(1,1)
y(1,2)
0.08
0.0
y(2,2)
0.00
y(1,3)
0.05
y(3,3)
Freq (1.000GHz to 10.00GHz)
Freq (1.000GHz to 10.00GHz)
Bild 2-9: Elemente der berechneten Y-Matrix für die Beispielschaltung aus Bild 2-8
links: Elemente der Hauptdiagonalen, rechts: Nebenelemente
2.0e-17
1.0e-17
0.0
1 2
3
4 5
6
7
Freq, GHz
8 9 10
mag(SpaltenSumme)
mag(ZeilenSumme)
Neben den Ergebnissen in Bild 2-9 wurde auch die Eigenschaft Zeilensumme bzw. Spaltensumme gleich Null getestet.
3.0e-17
2.0e-17
1.0e-17
0.0
1 2 3
4 5 6
7 8 9 10
Freq, GHz
Bild 2-10: Abweichung der ersten Zeilensumme bzw. der ersten Spaltensumme vom idealen
Verhalten einer „schwebenden“ Y-Matrix, dargestellt jeweils die Beträge
Wie in Bild 2-10 zu sehen ist, stimmt diese nicht exakt, jedoch mit einer sehr guten Näherung.
Die Abweichung vom theoretischen Wert ergibt sich infolge numerischer Ungenauigkeiten
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-10
während der Analyse, da die einzelnen Admittanz-Werte im allgemeinen nicht ohne Fehler
durch Dualzahlen endlicher Länge approximiert werden können.
Im folgenden Bild wurde nun ein Bezugspotential derart eingeführt, daß nun der ehemals äußere Knoten 3 auf 0V liegt. Dieses Bezugspotential wird im Folgenden als „Masse“ bezeichnet. Die resultierende Schaltung ist nun ein Zweitor, der ehemals innere Knoten 4 hat nun für
die Analyse die Bezeichnung 3.
Da nun im allgemeinen Fall ein Strom über die Masse „abfließen“ kann und dieser Strom
nicht in der Betrachtung der Y-Matrix explizit vorkommt, gilt nun nicht mehr Zeilen- bzw.
Spaltensumme gleich Null.
Bild 2-11: Modifizierte Beispielschaltung aus Bild 2-8
ehemaliges Tor3 repräsentiert nun das Bezugspotential 0V (Masse)
0.035
0.025
0.015
0.005
1 2
3
4 5
6
7
8 9 10
freq, GHz
mag(SpaltenSumme)
mag(ZeilenSumm
Die resultierende Y-Matrix kann aus der zuvor für das Dreitor bestimmten durch Streichen
der 3. Zeile und der 3. Spalte gewonnen werden.
0.035
0.025
0.015
0.005
1 2
3
4 5
6
7
8 9 10
Freq, GHz
Bild 2-12: Darstellung der ersten Zeilensumme bzw. der ersten Spaltensumme (Beträge) der
Y-Matrix der modifizierten Schaltung aus Bild 2-11
Es gilt für die reduzierte Dreitor-Matrix:
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-11
I1 Y11 Y12 Y13 U1
I 3Tor I 2 Y21 Y22 Y23 U 2
I 3 Y31 Y32 Y33 U 3 0
(2-24)
Die Nichtberücksichtigung des über Masse abfließenden Stromes I3 liefert für die äußeren
Klemmen:
I Y Y U
I 2Tor 1 11 12 1
I 2 Y21 Y22 U 2
(2-25)
Wie aus den folgenden simulierten Y-Parametern zu sehen ist, bleibt die Reziprozität des
Netzwerkes erhalten. Das Netzwerk ist jedoch wie zuvor unsymmetrisch (Y11Y22).
y(1,1)
0.0
0.04
y(1,2)
Freq (1.000GHz to 10.00GHz)
y(2,1)
0.00
Freq (1.000GHz to 10.00GHz)
0.00
0.05
Freq (1.000GHz to 10.00GHz)
0.05
y(2,2)
0.0
0.08
Freq (1.000GHz to 10.00GHz)
Bild 2-13: Y-Parameter der modifizierten Beispielschaltung aus Bild 2-12
Wie bereits erwähnt, interessiert in der Regel bei einem elektrischen Netzwerk nicht die gesamte Y-Matrix. Nahezu immer ist nur das Verhalten eines Systems bzgl. der äußeren KlemProf. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-12
men von Interesse. Die Anzahl dieser Klemmen beträgt meistens 2 (Verstärker, Filter, etc.)
und in wenigen Fällen 3 (Mischer, Leistungsteiler, etc.). Ist die Y-Matrix bzgl. dieser äußeren
Klemmen bekannt, so kann das Verhalten einer beliebig komplexen Schaltung für beliebige
äußere Beschaltungen mit Quellen bzw. Belastungen leicht ermittelt werden. Damit ergeben
sich sofort zwei Fragen:
Wie wird die das gesamte Netzwerk beschreibende Y-Matrix gebildet?
Wie kann die resultierende Matrix bzgl. der äußeren Knoten bestimmt werden?
Es ist die Aufgabe eines CAD-Tools, obige Aufgabenstellungen möglichst effizient und benutzerfreundlich zu lösen.
Im Folgenden soll nun zunächst untersucht werden, wie die gesamte Y-Matrix für eine gegebene Schaltung aufgestellt werden kann. Das vorgestellte Verfahren läuft auf das bekannte
Knotenpotentialverfahren hinaus. Aus formalen Gründen wird angenommen, daß das Netzwerk K äußere Knoten aufweist. Die Gesamtzahl aller Knoten wird mit L angegeben. Die
Knoten werden derart numeriert, daß mit den äußeren Knoten begonnen wird. Damit gilt:
Knoten 1...K
Knoten K 1...L
äußere Knoten
innere Knoten
LK
(2-26)
Die Elemente der Y-Matrix für das System in Bild 2-8 sollen nun bestimmt werden. Es gilt:
I1 Y11 U1 Y12 U 2 Y13 U 3 Y14 U 4
(2-27)
Werden nun die Potentiale (in der Folge wird auch dann etwas salopp von Spannungen die
Rede sein, wenn kein Bezugspotential existiert) U2,...,U4 zu Null gesetzt, so kann der Parameter Y11 wie folgt bestimmt werden:
Y11
I1
U1 U 2 U 3 U 4 0
(2-28)
Der Vergleich mit der Schaltung aus Bild 2-8 liefert dann:
Y11
1
1
R1 R2
(2-29)
Analog gilt für den Leitwert Y12:
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Y11
Lineare Netzwerke
2-13
I1
U 2 U1 U 3 U 4 0
(2-30)
Der Vergleich mit Bild 2-8 liefert jetzt aufgrund der gewählten Zählpfeilrichtung für die Admittanz:
Y12
1
R2
(2-31)
Demgegenüber gilt für den Leitwert Y13, daß dieser in hier den Wert Null hat, da keine direkte Verbindung zwischen den entsprechenden Knoten existiert. Führt man diese Überlegungen
konsequent zu Ende, so erhält man folgende Regel:
Vor dem Füllen der Y-Matrix wird diese mit Nullen initialisiert.
Die Y-Matrix kann dann sukzessive dadurch gebildet werden, daß die Y-Parameter
der einzelnen Bauelemente der Schaltung zur bestehenden Y-Matrix an den Stellen
addiert werden, die den Anschlußknoten der Bauteile entsprechen.
Wird ein passives Bauteil mit dem Leitwert Ya betrachtet welches die Knoten m und n miteinander verbindet, so ergibt sich
Ynnneu Ynnalt Ya
neu
alt
Ymm
Ya
Ymm
neu
nm
Y
Y
alt
nm
Ya
(2-32)
Ymnneu Ymnalt Ya
Wird eine gesteuerte Quelle (aktives Bauteil) gemäß Bild 2-14 betrachtet, so erhält man:
Bild 2-14: Gesteuerte Quelle mit vier Knoten
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-14
neu
alt
Ypm
Ypm
S
Ypnneu Ypnalt S
neu
qm
Y
Y
alt
qm
(2-33)
S
Yqnneu Yqnalt S
Die Anwendung von Gl. (2-32) soll wieder anhand des Systems aus Bild 2-8 verdeutlicht
werden. Begonnen wird mit
0
0
Y
0
0
0
0
0
0
0
0
0
0
0
0
0
0
(2-34)
da das Netzwerk 4 Knoten aufweist. Zu Beginn der Iteration wird der Widerstand R1 zwischen den Knoten 1 und 4 berücksichtigt. Es ergibt sich
1
R1
0
(Y )
0
1
R1
1
R1
0
0
1
R1
0 0
0 0
0 0
0 0
(2-35)
Im nächsten Schritt wird der Widerstand R2 zwischen Knoten 1 und Knoten 2 implementiert.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
1
1
R R
2
1
1
Y R2
0
1
R1
1
R2
2-15
1
R1
0
0
1
R1
0
1
R2
0
0
0
0
0
(2-36)
Die 3. Iteration mit C1 liefert:
1
1
R R
2
1
1
Y R2
0
1
R1
1
R2
0
1
jC1 0
R2
0
0
jC1
0
jC1
0
1
jC1
R1
1
R1
(2-37)
Endgültig ergibt sich:
1
1
R R
2
1
1
R2
Y
0
1
R1
1
R2
0
1
jC1
R2
0
0
1
j L1
jC1
Prof. Dr. P. Pogatzki 2012
1
j L1
jC1
1
j L1
1
1
jC1
R1
j L1
1
R1
(2-38)
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-16
Es sei an dieser Stelle darauf hingewiesen, daß zu jedem Zeitpunkt der Matrix-Generierung es
sich um eine schwebende Matrix handelt und somit Zeilen- bzw. Spaltensumme den Wert
Null ergeben. Die „Nullen“ in der Matrix ergeben sich aus der Tatsache, daß keine „direkte“
Verbindung der Knoten 1-3 und der Knoten 2-3 existiert. Wird nun wieder der äußere Knoten
3 auf Masse gelegt, so erhält man die neue Matrix durch Streichen der 3. Zeile und der 3.
Spalte.
(2-39)
Es ergibt sich dann die folgende 3×3-Matrix:
Y 33
1
1
R1 R2
1
R2
1
R1
1
R2
1
jC1
R2
jC1
R1
jC1
1
1
j
C
1
R1
j L1
1
(2-40)
Diese Matrix ist nicht mehr schwebend und kann daher auch invertiert werden. Wie kann nun
die Y-Matrix für das resultierende Zweitor bestimmt werden?
Dazu werden folgende Überlegungen durchgeführt:
In den inneren Knoten 3 (ehemals Knoten 4) fließt kein äußerer Strom hinein
Die Spannung am inneren Knoten 3 ist für das resultierende Zweitor nicht von Interesse
Daher gilt:
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-17
I1 Y11 Y12 Y13 U1
I 3Tor I 2 Y21 Y22 Y23 U 2
I 0 Y Y
3
31 32 Y33 U 3
I 3Tor Y 3Tor U
(2-41)
Multiplikation mit der Inversen der Y-Matrix liefert:
1
Y 3Tor I3Tor Y 3Tor Y 3Tor U E U
U Z 3Tor I 3Tor
1
(2-42)
Die Matrix (Z) wird als Impedanz-Matrix oder Z-Matrix bezeichnet und ist die Inverse der
Y-Matrix.
U1 Z11
U 3Tor U 2 Z 21
U Z
3 31
Z12
Z 22
Z 32
Z13 I1
Z 23 I 2
Z 33 I 3 0
(2-43)
Die Auswertung von Gleichung (2-43) liefert bei Nichtberücksichtigung von U3 die reduzierte
2×2-Z-Matrxix durch Streichen der 3. Zeile und 3. Spalte. Man erhält:
U Z
U 2Tor 1 11
U 2 Z 21
Z 2Tor I 2Tor
Z12 I1
Z 22 I 2
(2-44)
Die gesuchte Y-Matrix des Zweitores ergibt sich durch erneute Inversion zu:
Z 2Tor U 2Tor I 2Tor Y 2Tor U 2Tor
1
(2-45)
Im Allgemeinen und praktisch relevanten Fall besteht ein Netzwerk jedoch nicht nur aus 4
Knoten. Dieses können schnell einige hundert und bei integrierten analogen Schaltungen auch
durchaus ca. 1000 Knoten sein. Die Matrix-Inversion aus Gleichung (2-42) kann dann schnell
mit einem erheblichen numerischen Aufwand verbunden sein. Soll das Verhalten einer Schaltung „vollständig“ beschrieben werden, so sind in der Regel viele Frequenzpunkte zu analysieren, womit die Rechenzeit weiter ansteigt. Abhilfe kann die Anwendung von Verfahren
liefern, die die schwache Besetztheit der Y-Matrix ausnutzen.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-18
Ferner stellen sich mit wachsender Dimension der Y-Matrix numerische Probleme aufgrund
der endlichen Rechengenauigkeit ein. Diese müssen dann mittels geeigneter Verfahren wie
iterativer Lösung und Nachiteration verringert werden. Als Faustformel gilt, daß bei einfacher
Genauigkeit (32 Bit für eine Floating-Point-Zahl) Gleichungssysteme bis zum Rang 2000 mit
Standardverfahren wie Gauß-Algorithmus gelöst werden können.
2.2.2
Weitere Netzwerkparameter
Neben den im vorherigen Abschnitt betrachteten Y-Parametern gibt es für allgemeine N-Tore
und speziell für Zweitore weitere Beschreibungen linearer elektrischer Netzwerke. Diese sollen mit ihren wesentlichen Eigenschaften in diesem Abschnitt vorgestellt werden.
Es handelt sich dabei im Einzelnen um
1.
2.
3.
4.
Z-Parameter
S-Parameter
A-Parameter bzw. ABCD-Parameter
H-Parameter
Z-Parameter
Zunächst sollen die schon im letzten Abschnitt erwähnten Z-Parameter besprochen werden.
Diese sind wie folgt definiert:
U1 Z11
U 2 Z 21
U
U n Z n1
Z12 Z1n I1
Z 22 Z 2 n I 2
Z n 2 Z nn I n
(2-46)
Analog zu den Betrachtungen bzgl. der Messung bzw. Bestimmung der Y-Parameter soll wieder die folgende Schaltung untersucht werden.
Bild 2-15: Testschaltung zur Bestimmung der Z-Matrix
Mit der folgenden Beschreibung für das Zweitor
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
U1 Z11 I1 Z12 I 2
2-19
(2-47)
ergibt sich für Z11 die folgende Bedingung:
Z11
U1
I1 I 2 0
(2-48)
Da jedoch
I1 I 2
(2-49)
gilt, ist sofort einzusehen, daß Z11 nicht existiert. Damit ist verständlich, daß nicht für jede
Schaltung eine Z-Matrix existiert. Es gilt:
Notwendige, aber nicht hinreichende Bedingung für die Existenz einer Z-Matrix ist das Vorhandensein eines Bezugspotentials (Masse) in Form eines Knoten im Netzwerk.
Die Y-Matrix erlaubt eine größere Vielfalt von Schaltungstopologien zu erfassen als die ZMatrix. Daher hat die Admittanz-Matrix auch die wesentlich größere Bedeutung im CAD.
S-Parameter
Neben der Z-Matrix existiert für allgemeine N-Tore noch die in der Hochfrequenztechnik
gebräuchliche S-Matrix (Streuparameter-Matrix). Mit dem Bezugs- oder Normierungswiderstand ZN gilt dann für die Größen ai und bi formal am Tor i:
1
ai
2
1
bi
2
Ui
Ii Z N
ZN
Ui
Ii Z N
ZN
(2-50)
Der Bezugswiderstand ZN entspricht in der Regel dem Wellenwiderstand einer Leitung. In der
Mikrowellentechnik sind 50 üblich.
Die Größen ai und bi werden als Wellenparameter bezeichnet und haben die Dimension
Wurzel aus der Leistung. Sie sind gemäß der folgenden Beziehung verknüpft.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
b1 S11
b2 S 21
b
bn S n1
S12
S22
Sn 2
2-20
S1n a1
S 2 n a2
S nn an
(2-51)
Dabei bezeichnet ai die auf das Tor i zulaufende elektromagnetische Welle und bi die vom Tor
i weglaufende Welle. Die S-Matrix beschreibt damit das Transmissionsverhalten und das
Reflexionsverhalten.
Bild 2-16: Definition der Wellengrößen für ein mittels S-Matrix beschriebenes Viertor
Die S-Matrix existiert für Netzwerke mit beliebiger Topologie und auch für Systeme, bei denen Ströme und Spannungen nicht mehr definiert sind wie beispielsweise bei Hohlleitern,
Lichtwellenleitern, Microstrip-Schaltungen, etc.
Bild 2-17: Beispiele für die Anwendung der Streuparameter:
links: Lichtwellenleiter, Mitte: Hohlleiter,
rechts: Microstrip-Leitung
A-Parameter (ABCD-Parameter)
Die A-Parameter oder auch Kettenparameter verknüpfen das Strom/Spannungsverhältnis am
„Ausgang“ einer Schaltung mit dem Strom/Spannungsverhältnis am „Eingang“. Es gilt:
U1 A11
I1 A21
Prof. Dr. P. Pogatzki 2012
A12 U 2 A B U 2
A22 I 2 C D I 2
(2-52)
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
2-21
Während die bisher betrachteten Darstellungen sich u. a. dadurch auszeichneten, daß die einzelnen Parameter jeweils die gleiche Dimension aufwiesen (Leitwert, Widerstand, etc.), ist
dieses nun hier nicht mehr der Fall. So ist beispielsweise der Parameter A11 dimensionslos
und hat die Bedeutung einer Leerlauf-Spannungsübersetzung; A22 ist ebenfalls dimensionslos
und beschreibt eine Kurzschluß-Stromübersetzung.
Betrachtet man nun nicht mehr die Tore eines Netzwerkes, sondern realisiert jedes Tor mittels
zweier Klemmen, so spricht man von einem Vierpol. Die Stromsumme an jedem Tor (Klemmenpaar) ist dann Null. Die Kettenparameter sind typische Vierpol-Parameter. Die Bedeutung der A-Parameter resultiert aus den folgenden Überlegungen: Häufig werden in einem
komplexen System der Nachrichtentechnik verschiedene Vierpole hintereinander, man sagt in
Kette, geschaltet. Dieses können z. B. mehrere Verstärkerstufen sein. Werden nun zwei Vierpole, die durch die ABCD-Parameter (A)a und (A)b beschrieben werden, in Kette geschaltet,
so ergibt sich die folgende Anordnung. Es sei an dieser Stelle darauf hingewiesen, daß die AParameter ein unsymmetrisches Zählpfeilsystem verwenden.
Bild 2-18: Kettenschaltung zwei Vierpole, Beschreibung der Vierpole mittels der A-Matrix,
Definition des unsymmetrischen Zählpfeilsystems für den Strom sowie der Stromsumme an einem Tor
Aus Bild 2-18 können direkt die folgenden Bedingungen abgelesen werden.
U a 2 U b1
I a 2 I b1
(2-53)
Bei Verwendung der Vektorschreibweise
U a 2 U b1
I
a 2 I b1
(2-54)
erhält man für den ersten Vierpol:
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Lineare Netzwerke
U a1 Aa11
I
a1 Aa 21
2-22
Aa12 U a 2
Aa 22 I a 2
(2-55)
Analog ergibt sich unter Verwendung von Gleichung (2-54) für den zweiten Vierpol:
U a 2 U b1 Ab11
I
I
a 2 b1 Ab 21
Ab12 U b 2
Ab 22 I b 2
(2-56)
Einsetzen führt zu:
U a1 Aa11
I
a1 Aa 21
Aa12 Ab11
Aa 22 Ab 21
Ab12 U b 2
Ab 22 I b 2
(2-57)
Die resultierende Kettenmatrix ergibt also mittels Multiplikation der Teilmatrizen. Daher
rührt auch der Name „Kettenmatrix“.
A ges Aa Ab
(2-58)
Eine besondere Rolle spielt die Kettenmatrix auch bei der Betrachtung von Rauscheigenschaften.
H-Parameter
Die H- oder Hybrid-Parameter sind eine weitere lediglich für Vierpole anwendbare Darstellungsform. Ihre Bedeutung liegt hauptsächlich in der Beschreibung von Transistoreigenschaften. Es gilt mit einem symmetrischen Zählpfeilsystem:
U1 H11
I 2 H 21
H12 I1
H 22 U 2
(2-59)
So beschreibt etwa H11 den Kurzschluß-Eingangswiderstand und H21 die KurzschlußStromverstärkung.
Prof. Dr. P. Pogatzki 2012
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-1
3 Nichtlineare Netzwerke
400
300
200
100
0
200
180
160
140
120
100
80
60
40
20
-100
0
ts(I_Probe1.i), mA
Alle Halbleiter-Bauelemente wie Transistoren, Dioden, etc. sind nichtlineare Bauelemente.
Damit sind die in Kapitel 2 gemachten Überlegungen bei der Analyse von Netzwerken, die
Halbleiterbauelemente enthalten, nicht anwendbar.
Wird beispielsweise eine Diode mit einer sinusförmigen Spannung angeregt, so stellt sich der
in Bild 3-1 dargestellte Verlauf des Stromes ein. Der Verlauf des Stromes entspricht überhaupt nicht mehr dem der Spannung, es stellt sich aufgrund der Diodenkennlinie eine Gleichrichterwirkung ein.
Time, usec
Bild 3-1: links: Kennlinie der Diode mit IDiode =f(UDiode),
rechts: Diodenstrom als Funktion der Zeit bei sinusförmiger Anregung
In den folgenden Abschnitten wird untersucht, welche Auswirkungen das nichtlineare Verhalten des Bauelementes haben kann und wie dieses gegebenenfalls in einer Schaltungsumgebung berechnet bzw. berücksichtigt werden kann.
3.1 Einton-Anregung nichtlinearer Netzwerke
Es wird zunächst angenommen, dass in dem nichtlinearen Netzwerk nur eine sinusförmige
Signalquelle existiert und diese sich in einem stationären Zustand befindet.
Wird beispielsweise eine sinusförmige Spannung an eine Diode angelegt, so ergibt sich der in
Bild 3-1 dargestellte Verlauf. Dieser Verlauf ist wie der Sinus periodisch. Eine derartige periodische Funktion kann mittels Fourier-Reihenentwicklung in ihre harmonischen BestandteiProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-2
le zerlegt werden. Die dabei berechneten Fourier-Koeffizienten werden in ihrer Gesamtheit
als Spektrum bezeichnet. Die Frequenzen aller harmonischen Komponenten sind ganzzahlige
Vielfache der Frequenz der Anregung. Es gilt für die periodische Funktion s(t) mit den komplexen Koeffizienten cn:
s t Re cn e jnt
n 0
(3-1)
-20
0.05
0.04
0.03
0.02
0.01
0.00
0
20 40 60 80 100 120 140 160
dB(I_Probe1.i/1A)
mag(I_Probe1.i), A
Führt man eine derartige Fourier-Analyse für das obige Beispiel durch, so erhält man die im
folgenden Bild dargestellten Spektren für den Strom.
-30
-40
-50
-60
0
Freq, kHz
20 40 60 80 100 120 140 160
Freq, kHz
Bild 3-2: Spektrum des Diodenstromes bei einer Grundfrequenz der sinusförmigen Anregung
von 10 kHz und einer Reihenentwicklung bis 150 kHz
links: Spektrum des Diodenstromes im linearen Maßstab,
rechts: Spektrum des Diodenstromes im logarithmischen Maßstab (dB), Bezugsgröße ist 1 A
Dabei sind die Ergebnisse sowohl in linearen Maßstab als auch im logarithmischen Maßstab
(in dB mit der Bezugsgröße 1A) dargestellt. Die Frequenz der Quelle lag während der Simulation bei 10 kHz, die während der Fourier-Analyse berücksichtigte höchste Frequenz bei
150 kHz. Die Summe aus Gleichung (3-1) wurde also bei n=15 abgebrochen. Ferner ist zu
erkennen, dass die Gleichrichterwirkung der Diode einen Gleichstrom (Frequenz Null) erzeugt.
Wodurch entstehen jedoch die Signalkomponenten bei höheren Frequenzen?
Betrachtet man wieder das Beispiel der Diode, so bestimmt sich der Strom durch das Bauelement gemäß Shockley-Gleichung zu:
I Diode I s eU /UT 1
(3-2)
Der Strom durch die Diode kann in eine Taylor-Reihe entwickelt werden und man erhält mit
der Substitution
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
x
3-3
U
UT
(3-3)
die folgende Reihe:
I Diode
2
3
4
x
x
x
I S 1 x
1
2
6
24
e-Funktion
xn
I S I S an x n
n 1 n !
n 1
(3-4)
Werden nun aus Gründen der Übersichtlichkeit in Gleichung (3-4) nur die ersten drei Glieder
betrachtet, so erhält man für eine harmonische Anregung der Form
U U 0 cos t
(3-5)
U0
cos t
UT
(3-6)
mit
x
näherungsweise für den Diodenstrom:
I Diode
2
3
U
U
U
1
1
I s 0 cos t 0 cos t 0 cos t
2 UT
U
6 UT
T
(3-7)
Es wird nun untersucht, welche Auswirkungen der quadratische und der kubische Term auf
die harmonischen Komponenten des Diodenstromes haben.
Die Verwendung der Additionstheoreme
cos 2
1
3
1
1 cos 2 cos3 cos cos 3
2
4
4
(3-8)
liefert nach Einsetzen in Gleichung (3-7):
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
I Diode
Nichtlineare Netzwerke
3-4
U0
cos(t )
U
T
2
1 U0 1
Is
1
cos
2
t
2
2
U
T
3
U
1
3
1
0 cos t cos 3t
6 U T 4
4
(3-9)
Der Diodenstrom enthält also infolge der nichtlinearen Kennlinie Signalkomponenten bis hin
zur dreifachen Frequenz der Anregung. Allgemein bestimmt die Ordnung des letzten Gliedes
der Taylor-Reihe die höchste Frequenzkomponente. Im obigen Beispiel gilt für die Koeffizienten aus Gleichung (3-1):
Gleichanteil c0:
2
1 U 2 1
U
1
c0 I s 0 I s 0
2 U
2
4 UT
T
(3-10)
Signalfrequenz c1:
3
3
U
U
U
U
1
3
1
0
0
0
0
c1 I s
Is
U
U
U
U
6
4
8
T
T
T
T
(3-11)
Doppelte Signalfrequenz c2:
2
1 U 2 1
U
1
c2 I s 0 I s 0
4 UT
2 U T 2
(3-12)
Dreifache Signalfrequenz c3:
3
1 U 3 1
U
1
c3 I s 0 I s 0
24 U T
6 U T 4
Prof. Dr. P. Pogatzki 2013
(3-13)
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-5
In vielen Fällen ist eine derartige Abweichung der entwickelten Schaltung vom linearen Verhalten unerwünscht, wie zum Beispiel in der Audiotechnik. Als Maß für die Abweichung im
Fall der Einfrequenz-Anregung wurde in der Audiotechnik der sogenannte Klirrfaktor definiert. Es gilt unter Vernachlässigung des Gleichanteils:
k
c
n2
2
n
c
n 1
(3-14)
2
n
Der Klirrfaktor ist immer aussteuerungsabhängig (abhängig von der Signalstärke) und beschreibt das Verhältnis des Effektivwertes aller Oberwellen zum Effektivwert des Gesamtsignals.
Die Auswirkungen der Aussteuerung sollen nun an einem sehr einfachen Beispiel untersucht
werden. Dazu wird der im folgenden Bild dargestellte Verstärker betrachtet.
Bild 3-3: Einfacher Verstärker mit Bipolar-Transistor in Emitter-Schaltung,
links: Kollektor-Strom als nichtlineare Funktion der Basis-Emitter-Spannung Vbe,
rechts: Schematic des Verstärkers
Zunächst wird allein das Gleichstromverhalten der Schaltung betrachtet. Für Eingangsspannungen (Basis-Emitter-Spannung Vbe) kleiner als ca. 0,65 V fließt kein nennenswerter Ausgangsstrom (Kollektor-Strom). Der maximale Kollektor-Strom ist aufgrund der Kombination
Vdc 5 V und RL 1000 auf ca. 5 mA begrenzt. Dieser Zustand stellt sich ab etwa
Vbe 0, 76 V ein. Der Transistor befindet sich in der Sättigung. Damit ist der Aussteuerungsbereich der Schaltung mit ca. 110 mV definiert.
Für die weiteren Untersuchungen mit harmonischen Eingangssignalen wird diesen eine
Gleichspannung von 0,72 V überlagert. Dieser Wert liegt in etwa in der Mitte des Aussteuerungsbereiches, jedoch im „linearen“ Bereich der Kennlinie.
Zunächst wird der Verstärker mit einem kleinem Eingangssignal von 10 mV (klein gegenüber
dem ermitteltem Aussteuerungsbereich) betrieben. Es stellt sich der in Bild 3-4 gezeigte Verlauf der Ausgangsspannung ein. Es ist bereits bei dieser Aussteuerung eine deutliche Abweichung vom idealen harmonischen Verlauf zu erkennen. Die minimale Ausgangsspannung
beträgt 96 mV und der Transistor befindet sich dort bereits im Sättigungsbetrieb. Betrachtet
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-6
ts(Uaus), V
man die Amplitude der Ausgangsspannung, so ergibt sich ein Spitzenwert von etwa 1,1 V.
Damit ergibt sich eine Spannungsverstärkung von etwa 110 oder ca. 41 dB.
2.5
2.0
1.5
1.0
0.5
0.0
0.0
0.5
1.0
1.5
2.0
Time, msec
Klirrfaktor, %
10,0
m1
1,0
0,1
0,1m
1m
10m
100m 500m
Vin, V
m1
Vin=1,6 mV
Klirrfaktor=1,05 %
m2
Vin=500 mV
Klirrfaktor=38,9 %
1.6
1.5
1.4
1.3
1.2
1.1
0.0
0.5
1.0
1.5
2.0
Time, msec
Uaus[Vin=0,5 V], V
m2
40,0
Uaus[Vin=1,6mV], V
Bild 3-4: Einfacher Verstärker mit Bipolar-Transistor in Emitter-Schaltung,
links: Kollektor-Strom als Funktion der Zeit für eine Eingangswechselspannung
von 10 mV und 1 kHz,
rechts: Schematic des Verstärkers mit Einstellungen für eine nichtlineare Analyse
und Berücksichtigung von Signalkomponenten bis zur 5. Oberwelle (5*1 kHz)
6
5
4
3
2
1
0
-1
0.0
0.5
1.0
1.5
2.0
Time, msec
Bild 3-5: links: Klirrfaktor in % und doppelt logarithmischen Maßstab als Funktion der Eingangsamplitude für den Bereich 0,1 mV,..., 500 mV,
rechts: Signalform für k=1 % (oben) und Vollaussteuerung (unten) mit k=38,9 %
Es soll nun die Abhängigkeit des Klirrfaktors von der Amplitude der Eingangsspannung Vin
untersucht werden. Dazu wurde die Eingangsspannung in einem weiten Bereich von 0,1 mV
bis 500 mV variiert. Es stellt sich der in Bild 3-5 dargestellte Verlauf des Klirrfaktors ein. Im
doppelt logarithmischen Maßstab steigt der Klirrfaktor zunächst linear an um dann für sehr
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-7
20
10
0
-10
45
40
35
30
-20
-30
-40
0,1m
1m
10m
25
20
15
500m
100m
dB(Vgain)
dB(Uaus[1]/1V)
große Eingangsamplituden in einen Sättigungsbereich von etwa 40 % überzugehen. Zusätzlich sind die Signalformen für einen Klirrfaktor von 1 % und für die maximale Eingangsamplitude dargestellt.
Bei k=1 % ist optisch keine Abweichung von der idealen harmonischen Form zu erkennen.
Hingegen ähnelt das Signal bei Vin=500 mV stark einer Rechteckschwingung mit den Spannungsgrenzen 0 V und 5 V. Die Abweichungen bei der Grenze 5 V ergeben sich aufgrund der
endlichen Anzahl an Harmonischen, die während der Analyse berücksichtigt werden.
Vin, V
Bild 3-6: Ausgangsamplitude (linke Skala) der Grundschwingung in dB (Bezugswert 1 V) und
Spannungsverstärkung in dB als Funktion der Eingangsamplitude (rechte Skala)
dB(Uaus[3])
dB(Uaus[2])
dB(Uaus[1])
In Bild 3-5 ist zu erkennen, dass die Ausgangsspannung für eine große Aussteuerung in etwa
einer Rechteckschwingung entspricht. Auch noch größere Eingangssignale ändern nahezu
nichts an der Signalform und Signalamplitude. Damit aber bleibt auch die Amplitude der
Grundschwingung im Ausgangssignal konstant. Es stellt sich ein Sättigungsverhalten ein. Bei
konstanter Ausgangsamplitude und wachsender Eingangsamplitude verringert sich die Spannungsverstärkung. Dieser Effekt wird Kompression genannt. Es ergibt sich für die Spannungsverstärkung der in Bild 3-6 gezeigte Verlauf. Über einen weiten Bereich ist die Verstärkung mit ca. 41 dB konstant um dann mit wachsender Übersteuerung abzufallen.
20
0
-20
-40
-60
-80
-100
0,1m
1m
10m
100m
500m
Vin
Bild 3-7: Amplituden der Grundwelle, der 2. Harmonischen und der 3. Harmonischen in dB
(Bezugswert 1 V)
Der Klirrfaktor wird vom Anteil der Oberwellen (höheren Harmonischen) im Signal bestimmt. Betrachtet man den Verlauf der ersten drei Harmonischen als Funktion der Eingangsamplitude, so stellt man fest, dass bei großen Aussteuerungen die 3. Harmonische die 2. Harmonische überwiegt. Dieses ergibt sich aus der Ähnlichkeit des Signals mit einer RechteckProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-8
schwingung. Die ideale Rechteckschwingung enthält nur ungeradzahlige Vielfache der
Grundfrequenz. Dieser Zusammenhang ist in Bild 3-7 zu sehen.
Für vier verschiedene Aussteuerungen sind sowohl die Wellenform als auch das Spektrum in
der folgenden Grafik dargestellt.
Bild 3-8: Signalform und Spektrum des Ausgangssignals für verschiedene Eingangsamplituden
Waveform A: Nahezu idealer sinusförmiger Verlauf bei sehr kleinem Eingangssignal, lediglich die 2. Harmonische ist zu beobachten, die Amplitude des Gleichanteils
entspricht der des eingestellten Arbeitspunktes
Waveform B: Einsetzende Begrenzung des Ausgangssignals bei 0 V bei um ca. 15 dB
vergrößerter Grundwelle und Steigerung der 2. Harmonischen um ca. 30 dB, Gleichanteil noch nahezu unverändert, jedoch Zunahme der höheren Harmonischen
Waveform C: Starke Begrenzung des Ausgangssignals bei 0 V (Gleichrichter) und
deutliche Zunahme aller höheren Harmonischen, Zunahme des Gleichanteils infolge
der Gleichrichterwirkung
Waveform D: Starke Begrenzung des Ausgangssignals bei 0V und 5 V, 3. Harmonische überwiegt nun die 2. Harmonische, weitere Zunahme des Gleichanteils auf ca.
Mittelwert zwischen 0 V und 5 V
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-9
3.2 Mehrton-Anregung nichtlinearer Netzwerke
In vielen Fällen existieren in einem Netzwerk mehrere unabhängige Signalquellen mit unterschiedlichen Frequenzen. Beispielsweise besteht das Audiosignal eines Mikrofons aus einem
breitbandigem Spektrum von ca. 20Hz→20kHz. Der Eingangsverstärker eines Mobiltelefons
muss die Signale aller Kanäle innerhalb eines Frequenzbandes gleichzeitig verstärken.
Vereinfachend wird nun angenommen, dass das zu untersuchende nichtlineare Netzwerk von
nur zwei Quellen mit gleicher Amplitude aber unterschiedlicher Frequenz angeregt wird.
U.cos(t)
U.cos(t)
Uin Nichtlineares
System
Uout
Bild 3-9: Nichtlineares Netzwerk mit zwei Eingangssignalen unterschiedlicher Frequenz
Dann gilt für die Eingangsspannung:
U in U cos 1t U cos 2t , 2 n 1 , n
(3-15)
Wird das nichtlineare Verhalten wieder mittels einer kubischen Kennlinie angenähert, so
gilt für die Ausgangsspannung:
U out a0 a1 U in a2 U in2 a3 U in3
(3-16)
Es werden nun die Auswirkungen der Koeffizienten a0,...,a3 betrachtet. Dazu wird das folgende Additionstheorem verwendet:
cos cos
1
cos cos
2
(3-17)
Es ergibt sich dann:
a0:
Der Koeffizient a0 liefert ein signalunabhängigen Gleichanteil im Ausgangssignal.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-10
a1:
Der Koeffizient a1 liefert das Eingangssignal (verstärkt oder gedämpft), neue Frequenzkomponenten sind nicht enthalten
a2:
Der Koeffizient a2 liefert neue Frequenzkomponenten. Es gilt:
U out ,a2 a2 U cos 1t U cos 2t
2
a2 U 2 cos 2 1t 2 cos 1t cos 2t cos 2 2t
(3-18)
Die Verwendung der Additionstheoreme (3-8) und (3-17) führt zu:
U out ,a2
1
1
cos
2
t
1
2
a2 U 2 cos 1 2 t cos 1 2 t
1
1 cos 22t
2
(3-19)
Analog zur Einton-Anregung entstehen Signale mit der doppelten Frequenz der jeweiligen Anregung. Zusätzlich sind zwei Signale vorhanden, deren Frequenzen aus der Differenz- bzw. Summenfrequenz der Eingangssignale bestehen. Dieser Effekt wird Intermodulation genannt.
Beispiel: f1=1 kHz, f2=1,1 kHz, es entstehen infolge des Koeffizienten a2 Signale mit folgenden Frequenzen:
Frequenz der Signalkomponente in Hz
Relative Amplitude bezogen
auf a2U2
0
100
2000
2100
2200
1
1
0,5
1
0,5
Handelte es sich hier um einen Audio-Verstärker, so fielen alle Signale in den hörbaren
Bereich. Hingegen könnten in einem schmalbandigen Empfänger (Mittenfrequenz ca.
1 kHz) alle Störungen mittels geeigneter Filter unterdrückt werden.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-11
a3:
Der Koeffizient a3 liefert ebenfalls neue Frequenzkomponenten. Es gilt ausgehend von
(3-19):
U out ,a3
1
t
1
cos
2
1
2
a3 U 3 cos 1 2 t cos 1 2 t
1
1 cos 22t
2
cos 1t cos 2t
(3-20)
Es entsteht eine Vielzahl neuer Frequenzen. Von besonderem Interesse sind die folgenden Terme:
U IM 3,1 :
1
cos 21t cos 2t , cos 1 2 t cos 1t
2
(3-21)
U IM 3,2 :
1
cos 22t cos 1t , cos 1 2 t cos 2t
2
(3-22)
Die Auswertung von Gleichung (3-21) führt zu:
U IM 3,1 a3 U 3
3
cos 21 2 t cos 21 2 t
4
(3-23)
Es entsteht nun eine Komponente mit der Frequenz cos 21 2 t , die auch bei einem
schmalbandigem System wieder in das Empfangsband fällt. Dieser Effekt wird als Intermodulation 3. Ordnung bezeichnet. Analog ergibt die Auflösung von Gleichung
(3-22):
U IM 3,2 a3 U 3
3
cos 1 22 t cos 1 22 t
4
(3-24)
Werden nun wieder Eingangssignale mit den Frequenzen f1=1 kHz und f2=1,1 kHz verwendet, so entstehen infolge der Intermodulation 3. Ordnung die folgenden Frequenzkomponenten f1 und f2, die in unmittelbarer Umgebung der Frequenzen der Eingangssignale liegen:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-12
f 2 1 kHz 1,1 kHz 900 Hz
f 2 1,1 kHz 1 kHz 1200 Hz
(3-25)
Werden die Spannungen U IM 3,1 und U IM 3,2 doppelt logarithmisch dargestellt, so ergibt sich
eine Gerade mit der Steigung 3, da U IM 3 proportional zu U 3 ist. Es gilt daher:
U IM 3,dB 20 log
U IM 3
20 log U IM 3 20 log1V
1V
(3-26)
Einsetzen und Zusammenfassen liefert:
3a
U IM 3,dB 20 log U 3 log 3 20 log1V
4
3a
U IM 3,dB 3 20 log U 20 log 3 log1V
4
U IM 3,dB 3 20 log U const.
(3-27)
Konstante
dB(Uaus)
Die Grundwelle im Ausgangssignal infolge a1 (dem linearen Glied der TaylorReihenentwicklung) steigt jedoch proportional zu U. In der doppelt logarithmischen Darstellung ist dieses eine Gerade mit der Steigung „1“. Beide Geraden besitzen damit einen Schnittpunkt. Dieser wird Intercept Point 3. Ordnung oder kurz als IP3 bezeichnet.
10
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
6
Freq, kHz
Bild 3-10: Spektrum (links) der Ausgangsspannung eines einfachen Verstärkers (rechts) in dB
(Bezug 1 V) für eine Eingangsspannung von 10 mV, Frequenzen der Eingangssignale 1 kHz und 1,1 kHz, Berücksichtigung von Signalkomponenten bis zur 5. Oberwelle
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-13
Wie in Bild 3-10 zu sehen ist, entsteht infolge der Intermodulation eine Vielzahl neuer Frequenzen. Werden Komponenten bis zur 5. Ordnung (also Taylor-Reihenentwicklung bis einschließlich a5) berücksichtigt, so setzt sich das Spektrum aus insgesamt 31 (!) Komponenten
zusammen. Bei Anregung mit nur einem Signal ergäben sich lediglich 6 Frequenzkomponenten 0, f , 2 f ,...,5 f . Insbesondere ist zu beobachten, dass in der Umgebung der Frequenzen
der beiden Eingangssignale neue Komponenten bei 800 Hz, 900 Hz, etc. vorhanden sind. Dieser Sachverhalt ist in Bild 3-11 dargestellt.
dB(Uaus)
25
0
-25
-50
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
1.5
Freq, kHz
Bild 3-11: Spektrum des Ausgangssignals aus Bild 3-10 in der Umgebung der Signalfrequenzen 1 kHz und 1,1 kHz, Berücksichtigung von Signalkomponenten bis zur 5. Ordnung
Versucht man nun den IP3 zu messen, so stellt man fest, dass dieser Schnittpunkt in der Realität nicht existiert. Lediglich die linearen Verlängerungen der Verläufe für die Grundwelle
und für die Intermodulation 3. Ordnung IM3 schneiden sich. Infolge der schon angesprochenen Kompression (Rückgang der Verstärkung bei großer Aussteuerung) zeigen beide Verläufe ein Sättigungsverhalten und weichen von der Geraden ab. Dieses gilt auch für die in Bild
3-12 dargestellten Intermodulationsprodukte 5. Ordnung IM5, die sich bei vorhandenen Taylor-Reihenglied a5 ergeben.
50
dB(IM5)
dB(IM3)
dB(IM1)
0
IP3
-50
-100
-150
-200
-80 -75 -70 -65 -60 -55 -50 -45 -40 -35 -30 -25 -20 -15 -10
dB(Vin)
Bild 3-12: Verlauf der Intermodulationsprodukte 3. und 5. Ordnung und Definition des IP3
IM1: Grundwelle bei 1 kHz (Steigung 1)
IM3: Intermodulation 3. Ordnung 2*1,1 kHz – 1 kHz = 1,2 kHz (Steigung 3)
IM5: Intermodulation 5. Ordnung 3*1,1 kHz – 2*1 kHz = 1,3 kHz (Steigung 5)
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-14
Berechnet man aus den Verläufen in Bild 3-12 bei kleinen Eingangssignalen den Output-IP3
(Angabe des Schnittpunktes durch die Ausgangsspannung), so ergibt sich für den in Bild 3-10
gegebenen Verstärker ein Wert von 35 V. Diese Spannung ist jedoch deutlich höher als die
Speisespannung von 5 V. Allein aus diesem Grund ist einzusehen, dass der IP3 ein theoretischer Schnittpunkt ist. Er eignet sich jedoch hervorragend zur Charakterisierung von Verstärkern. Bei Kenntnis des IP3 (und gegebenenfalls des IP5) können die in das Nutzband (Umgebung der Signalfrequenzen) fallenden Intermodulationsprodukte durch einfache Geradengleichungen leicht berechnet werden.
3.3 Linearisierung und Arbeitspunkt
In vielen Fällen ist das nichtlineare Verhalten nicht von Interesse, da nur eine kleine Aussteuerung vorliegt oder die Schaltung durch geeignete Maßnahmen sich über einen weiten
Aussteuerungsbereich linear verhält. Ferner sind nichtlineare Schaltungen in der Regel nur
numerisch zu analysieren. Eine geschlossene analytische Beschreibung ist nahezu immer unmöglich.
Es wird daher angestrebt, die Methoden zur Beschreibung linearer Netzwerke auf eigentlich
nichtlineare Netzwerke anzuwenden. Eine einfache Methode ist die Linearisierung im Arbeitspunkt.
Zur Verdeutlichung wird zunächst wieder eine einfache Diode betrachtet.
I_Probe1.i, mA
400
300
200
100
0.80
0.78
0.76
0.74
0.72
0.70
0.68
0.66
0.64
0.62
0.60
0
VD
Bild 3-13: links: Kennlinie der Diode mit Kennzeichnung des Arbeitspunktes U=0,76 V und
des differentiellen Widerstandes rDiode=0,4 Ohm,
rechts: Schematic zur Berechnung der Diodenkennlinie
Die entsprechende Kennlinie ist in Bild 3-13 zusammen mit der verwendeten Messanordnung
dargestellt. Wie schon zuvor wird die Kennlinie der Diode in eine Taylor-Reihe entwickelt.
Es wird jedoch angenommen, dass eine Beschreibung lediglich mit dem konstanten Term und
dem linearen Glied hinreichend genau ist. Bei Entwicklung im Punkte U0 ergibt sich für den
Diodenstrom:
I Diode U I Diode U 0
Prof. Dr. P. Pogatzki 2013
I Diode
U
U U 0
(3-28)
U U 0
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-15
Für den konstanten Term oder Gleichanteil ergibt sich:
U
I Diode U 0 I s exp 0
UT
I0
(3-29)
Das lineare Glied ergibt sich mit Hilfe der ersten Ableitung zu:
U
I Diode
I S exp
U
UT
1
UT
IS
U
exp
UT
UT
(3-30)
Die Berechnung der Ableitung an der Stelle U=U0 ergibt einen von U0 abhängigen Leitwert
bzw. Widerstand rDiode. Dieser Widerstand trägt die Bezeichnung differentieller Widerstand
aufgrund seiner Definition und wird deshalb mit einem kleinen Buchstaben gekennzeichnet:
I Diode
U
U U 0
U
Is
exp 0
UT
UT
1
g Diode
r
Diode
(3-31)
Das Einsetzen dieser Ergebnisse in (3-32) liefert:
I Diode U I 0
U U0
u
I 0 Diode I 0 iDiode
rDiode
rDiode
(3-32)
Die Spannung U0 und der Strom I0 sind Gleichgrößen und definieren den Arbeitspunkt. Die
Spannung uDiode und der Strom iDiode sind Wechselgrößen und beschreiben die Abweichung
vom Arbeitspunkt. Da sie nur für kleine Aussteuerungen gültig sind, werden sie auch als
Kleinsignalgrößen bezeichnet und mit Kleinbuchstaben gekennzeichnet.
In einem beliebigen Netzwerk, bestehend aus linearen Bauelementen und linearisierten Bauelementen (im obigen Beispiel die Diode), gilt wieder der Überlagerungssatz. D. h., Knotenund Maschengleichungen müssen sowohl für die Gleichgrößen als auch für die Wechselgrößen erfüllt sein. Damit aber können zwei Systeme von Gleichungen gebildet werden:
1. Gleichungen, die allein den Arbeitspunkt (DC, Direct Current) beschreiben und das nichtlineare Verhalten der Halbleiter berücksichtigen
2. Gleichungen, die allein die Abweichung vom Arbeitspunkt und damit die Wechselgrößen
(AC, Alternating Current) beschreiben. Diese Gleichungen beschreiben wieder ein rein lineares Netzwerk, da z. B.
iDiode
uDiode
rDiode
(3-33)
gilt.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Nichtlineare Netzwerke
3-16
mag(I_Probe1.i), A
Die Linearisierung im Arbeitspunkt erlaubt es, die Ergebnisse aus Kapitel 2 unter gewissen
Einschränkungen auch auf eigentlich nichtlineare Schaltungen anzuwenden. Es muss jedoch
immer die Gültigkeit der Taylor-Reihenentwicklung beachtet werden, da ansonsten in einer
Schaltungsanalyse unsinnige Ergebnisse produziert werden.
Anhand eines einfachen Beispiels soll mittels ADS eine AC-Analyse (arbeitspunktabhängige
Kleinsignalanalyse) durchgeführt werden. Es wird erneut die bekannte einfache Diodenschaltung betrachtet. Als Arbeitspunkt wird eine Gleichspannung von 0,76 V gewählt. Dieser
Gleichspannung wird gemäß Bild 3-14 eine Wechselspannung mit variabler Amplitude überlagert und der Strom (in diesem Fall der Kleinsignalstrom) durch das Bauelement berechnet.
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0.0
0.2
0.4
0.6
0.8
1.0
Vg
Bild 3-14: Kleinsignalstrom aufgrund einer arbeitspunktabhängigen AC-Analyse durch die
Diode als Funktion der Wechselamplitude
Betrachtet man die Kennlinie der Diode in Bild 3-13, so ist sofort einzusehen, dass eine Beschreibung der Diode mittels Kleinsignalparametern nur für sehr kleine Aussteuerungen gültig sein kann. Während der AC-Analyse bestimmt der Simulator zunächst den Arbeitspunkt
um dann das Bauelement in diesem Arbeitspunkt als rein linear anzusehen. Eine Überprüfung der Gültigkeit der Analyse wird in diesem Modus des Simulators nicht durchgeführt. Dieses führt zu dem unsinnigen Ergebnis in Bild 3-14, bei dem selbst für Eingangssignale von 1 V die Diode noch als linear betrachtet wird (obwohl dieses sich dann zeitweise im
Sperrbetrieb befindet).
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-1
4 Rückkopplung
Die Eigenschaften elektronischer Bauelemente wie z. B. Transistoren oder FET’s weisen in
der Regel Streuungen auf. Die Eigenschaften dieser Bauelemente sind ferner temperaturabhängig und einem Alterungsprozeß unterworfen. Damit ist das tatsächliche Verhalten einer
entwickelten Schaltung ohne Kenntnis der exakten Parameter der jeweils verwendeten Halbleiter nicht möglich. Jede produzierte Schaltung müßte auf die zuvor gemessenen Transistorparameter angepaßt werden. Eine derartige Vorgehensweise ist jedoch in einer kostengünstigen Massenproduktion nicht möglich. Die Auswirkungen von Änderungen der Umgebungstemperatur könnten so jedoch immer noch nicht ausgeglichen werden. Eine einfache Möglichkeit diese Probleme zu lösen ist, eine Beschaltung zu verwenden, die den Einfluß der
Streuungen bzw. Änderungen der Transistorparameter auf die Gesamtschaltung verringert.
Dieses kann durch eine geeignete Rückführung des Ausgangssignals auf den Eingang der
Schaltung geschehen. Diese Rückführung wird als Rückkopplung bezeichnet.
Grundsätzlich können zwei Arten von Rückkopplung unterschieden werden: Die Gegenkopplung und die Mitkopplung. Es ergeben sich die beiden folgenden Blockschaltbilder.
Bild 4-1: Grundprinzipien der Rückkopplung,
links: Mitkopplung,
rechts: Gegenkopplung
Für die verschiedenen Arten der Rückkopplung gelten dann die folgenden Beziehungen. Für
die Mitkopplung gilt:
U out f H f U in f k f U out f
(4-1)
Umformen liefert die resultierende Übertragungsfunktion H‘:
U out 1 k H U in H
H
U in
1 k H
H U in
U out
U out
H
Prof. Dr. P. Pogatzki 2013
(4-2)
H
1 k H
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-2
Analog gilt für die Gegenkopplung:
H
U in
1 k H
H
H
1 k H
U out
(4-3)
Die Rückkopplung verändert die Übertragungseigenschaften der Schaltung. Es ergibt sich im
Fall der Gegenkopplung eine neue Übertragungsfunktion, die unempfindlicher gegenüber
Variationen von Bauteilparametern ist. Die Mitkopplung ist ungeeignet, um die zu Beginn des
Kapitels besprochenen Probleme bei der Schaltungsentwicklung zu lösen. Die Mitkopplung
wird beispielsweise beim Entwurf von Oszillatoren eingesetzt.
Der Einfluss der Gegenkopplung soll nun kurz untersucht werden. Dazu wird angenommen,
dass die Übertragungsfunktion H von dem Parameter x abhängt. Dieser Parameter kann beispielsweise eine Steilheit, eine parasitäre Kapazität, die Temperatur, etc. sein. Auf eine Änderung von x reagiert die ursprüngliche Übertragungsfunktion näherungsweise mit
H
H
x
x
(4-4)
Die aufgrund einer Gegenkopplung entstandene neue Übertragungsfunktion reagiert auf eine
Parameteränderung wie folgt:
H H
x
H x
1
H
H
H
k
x
2
1
k
H
x
1 k H
H
(4-5)
Zusammenfassen liefert:
1 k H
k H H
H
x
2
2
x
1
k
H
1
k
H
H
1
H
x
2
x
1 k H
(4-6)
Die Empfindlichkeit von H‘ gegenüber Variationen des Parameters x ist also um den Faktor
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-3
1
2
1
k
H
(4-7)
kleiner geworden. Erkauft wird dieser Effekt mit einer Übertragungsfunktion, die um den
Faktor
1
1 k H
(4-8)
kleiner ist. Im Fall eines Verstärkers verringert die Gegenkopplung damit die Verstärkung. Da
jedoch die Verbesserung der Unempfindlichkeit gegenüber Toleranzen den Verlust an Verstärkung überwiegt, führt die Gegenkopplung zu einer Verbesserung der Schaltungseigenschaften insgesamt.
Allgemein können die folgenden Effekte durch Gegenkopplung erzielt werden:
Stabilisierung des Arbeitspunktes und der Schaltungseigenschaft (wie z. B. Verstärkung)
gegenüber Temperaturschwankungen und Exemplarstreuungen
Anpassung von Ein- und Ausgangsimpedanz der Schaltung an die Schaltungsumgebung
in einem weiten Bereich unabhängig von Transistoreigenschaften
Änderung des Frequenzganges und Erhöhung der Bandbreite bei konstantem Verstärkungs-Bandbreite-Produkt
Verringerung der Nichtlinearität
Änderung der Rauscheigenschaften durch modifizierte Bedingungen für Rauschanpassung
4.1 Mögliche Varianten der Gegenkopplung
Es wird angenommen, dass es sich bei den betrachteten Schaltungen um Vierpole handelt und
somit ein Eingang und ein Ausgang existieren. Sowohl am Eingang als auch am Ausgang
existieren Ströme und Spannung gemäß den Überlegungen aus Kapitel 2. Jede Größe des
Ausgangs (also Strom oder Spannung) kann nun auf jede Größe des Eingangs gegengekoppelt
werden. Damit ergeben sich die vier folgenden möglichen Varianten der Gegenkopplung.
Serien-Parallel-Gegenkopplung Ausgangsspannung
Serien-Serien-Gegenkopplung Ausgangsstrom
Parallel-Parallel-Gegenkopplung Ausgangsspannung
Parallel-Serien-Gegenkopplung Ausgangsstrom
Prof. Dr. P. Pogatzki 2013
Eingangsstrom
Eingangsstrom
Eingangsspannung
Eingangsspannung
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-4
Serien-Parallel-Gegenkopplung
Serien-Serien-Gegenkopplung
Parallel-Parallel-Gegenkopplung
Parallel-Serien-Gegenkopplung
Bild 4-2: Grundprinzipien der Gegenkopplung
Der Einfluß der Gegenkopplung soll für zwei Beispiele untersucht werden.
Zunächst wird die Serien-Serien-Gegenkopplung betrachtet. Als Rückkopplungsnetzwerk
wird ein einfacher Widerstand gewählt und das mittels H(f) beschriebene System durch einen
Bipolar-Transistor in Emitter-Schaltung realisiert.
Bild 4-3: links: Kollektor-Schaltung mit Rückkopplungswiderstand RE
rechts: sehr einfaches Ersatzschaltbild für Transistor mit Emitter-Widerstand
Es ergibt sich die in Bild 4-3 dargestellte Schaltung. Wird der Transistor durch ein Ersatzschaltbild beschrieben, welches nur den Eingangswiderstand rBE, die Steilheit S und den Ausgangswiderstand rCE infolge Early-Effekt berücksichtigt, so erhält man die einfache Struktur
in Bild 4-3 rechts. Aus Gründen der Übersichtlichkeit werden parasitäre Kapazitäten und Induktivitäten nicht betrachtet.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-5
Dass es sich wirklich um eine Serien-Serien-Gegenkopplung handelt, kann anhand der folgenden Skizze verdeutlicht werden. In der Literatur wird diese Gegenkopplung auch als
Stromgegenkopplung bezeichnet.
Bild 4-4: Aufteilung der Emitter-Schaltung mit Stromgegenkopplung in Transistor und Rückkopplungsnetzwerk
Wie in Bild 4-4 zu sehen, fließt der Eingangsstrom iin sowohl durch den Transistor als auch
durch das Rückkopplungsnetzwerk RE. Analog gilt für den Ausgangsstrom iout , dass dieser
durch Transistor und RE fließt. Es handelt sich also um Serien-Serien-Gegenkopplung.
Die Wirkungsweise der Gegenkopplung soll nun mit Hilfe der Y-Matrix untersucht werden.
Die 2x2-Y-Matrix des Bipolar-Transistors in Emitter-Schaltung lautet für das Ersatzschaltbild
des Transistors aus Bild 4-3:
g BE
S
Y 2 x 2 BIP
0
gCE
(4-9)
Die Erweiterung zur schwebenden Matrix ergibt (Knoten 1=Basis, Knoten 2=Kollektor, Knoten 3=Emitter):
g BE
Y 3 x3 BIP S
g S
BE
0
gCE
gCE
g BE
gCE S
g BE gCE S
(4-10)
Am Knoten 3 liegt nun zusätzlich der Rückkopplungswiderstand RE. Es ergibt sich für die
gesamte Y-Matrix:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
g BE
Y 3 x3 BIP S
g S
BE
Rückkopplung
g BE
0
gCE
gCE
4-6
g BE
gCE S
gCE S GE
(4-11)
In den Knoten 3 fließt kein äußerer Strom hinein. Somit kann die Spannung u3 mittels
i3 g BE S u1 gCE u2 g BE gCE S GE u3 0
(4-12)
eliminiert werden. Es ergibt sich dann für u3 :
u3
g BE
gCE
g BE S
u1
u2
S gCE GE
g BE S gCE GE
(4-13)
Einsetzen in Gleichung (4-11) und Streichen der dritten Zeile liefert die resultierende YMatrix
Y 2 x 2res
g BE g BE S
g BE
g BE S gCE GE
S gCE S g BE
S
g BE S gCE GE
gCE
S gCE gCE
g BE S gCE GE
g BE gCE
g BE S gCE GE
(4-14)
Betrachtet man Gleichung (4-14), so fällt auf, dass das gegengekoppelte System nun eine von
Null verschiedenen Koeffizienten Y12 aufweist. Dieses ist bei der einfachen Y-Matrix des
Transistors nicht der Fall. Besteht das Rückkopplungsnetzwerk aus komplexen Admittanzen,
so kann dieses bei realen Transistoren im ungünstigen Fall bei bestimmten Frequenzen zu
einer Mitkopplung führen und Instabilitäten und damit Oszillationen verursachen.
Die Auswirkung auf die einzelnen Matrixelemente soll im Folgenden betrachtet werden. Für
Y11 gilt bei Verwendung einen gemeinsamen Nenners:
Y11
g BE g BE S gCE GE
g BE g BE S
g BE S gCE GE
g BE S gCE GE
(4-15)
Die Zusammenfassung resultiert dann in:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
Y11 g BE
4-7
gCE GE
g BE S gCE GE
(4-16)
Ersetzt man die Steilheit S durch die Stromverstärkung und den Basis-Emitter-Widerstand
rBE
S g BE
(4-17)
und nimmt ferner an, dass die Stromverstärkung ß größer als 100 ist, so kann die folgende
Näherung durchgeführt werden:
Y11 g BE
gCE GE
gCE GE
g BE
g BE 1 gCE GE
g BE gCE GE
(4-18)
Eine hinreichend große Early-Spannung liefert einen sehr kleinen Ausgangsleitwert gCE
und eine nicht zu große Gegenkopplung vereinfacht Gleichung (4-18) wegen gCE GE zu:
Y11 g BE
GE
g G
G
BE E E
g BE GE
g BE
(4-19)
Der Kehrwert des Eingangsleitwertes Y11 ist der Kleinsignaleingangswiderstand rin. Es ergibt
sich die bekannte Beziehung:
rin RE
(4-20)
Mit Hilfe von RE kann daher der Eingangswiderstand der Emitterschaltung eingestellt werden. Er ist nun näherungsweise unabhängig vom Arbeitspunkt.
Wird nun obige Rechnung in ähnlicher Form für den Parameter Y21 durchgeführt, so erhält
man die modifizierte Steilheit des Transistors S‘:
Y21 S S
S gCE S g BE
g BE S gCE GE
S g BE S gCE GE S gCE S g BE
g BE S gCE GE
g BE S gCE GE
(4-21)
Vereinfachen ergibt dann:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
S
4-8
S GE g BE gCE
g BE gCE S GE
(4-22)
Werden erneut die bei der Bestimmung von Y11 gemachten Näherungen sowie Gleichung
(4-17) verwendet, so erhält man:
S g BE
GE gCE
g GE
S GE
BE
g BE 1 gCE GE g BE GE S GE
(4-23)
Für nicht zu kleine Kollektor-Ströme S GE gilt dann:
S
S GE
1
GE
S
RE
(4-24)
Der infolge der Gegenkopplung resultierende Transistor besitzt damit eine Steilheit, die in
einem weiten Bereich nur noch vom Emitter-Widerstand RE abhängt. Änderungen der Steilheit infolge Exemplarstreuungen oder Temperaturschwankungen spielen keine Rolle mehr,
solange die oben getroffenen Annahmen nicht verletzt werden.
Im zweiten Beispiel soll eine Parallel-Parallel-Gegenkopplung untersucht werden. Diese wird
in der Literatur auch als Spannungsgegenkopplung bezeichnet. Verwendet wird wieder das
gleiche vereinfachte Transistor-Ersatzschaltbild.
Die Spannung des Ausgangs wird über ein Netzwerk, in diesem Fall der Widerstand Rk, auf
den Eingang zurückgeführt. Auch für diese Rückkopplung sollen die wesentlichen Eigenschaften untersucht werden.
Bild 4-5: Aufteilung der Emitter-Schaltung mit Spannungsgegenkopplung in Transistor und
Rückkopplungsnetzwerk
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-9
Ausgehend von
g BE
S
Y 2 x 2 BIP
0
gCE
(4-25)
und der Admittanz-Matrix des Rückkopplungsnetzwerkes
Gk
Gk
Y k
Gk
Gk
(4-26)
ergibt sich die resultierende Y-Matrix infolge der vorhandenen Parallelschaltung als Summe
der Einzelmatrizen. Es gilt:
g BE Gk
S Gk
Y 2 x 2 ges
Gk
gCE
Gk
(4-27)
Um die Wirkung der Spannungsgegenkopplung zu verstärken, wird in der Praxis ein Vorwiderstand R1 in Serie zur Basis verwendet. Dieser Vorwiderstand kann auch der Innenwiderstand der speisenden Quelle sein. Die dann resultierende Gesamtschaltung ist in Bild 4-6 dargestellt.
Bild 4-6: Aufteilung der Emitter-Schaltung mit Spannungsgegenkopplung in rückgekoppelten
Transistor und Vorwiderstand R1
Um die Wirkung von R1 zu untersuchen, wird zunächst die resultierende Y-Matrix (Y‘) aus
der des rückgekoppelten Transistors (Y)2x2ges bestimmt. Es gilt:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-10
i1 Y11 u1 Y12 u2
i2 Y21 u1 Y22 u2
u1 u1 i1 R1
(4-28)
Ersetzen von u1 liefert dann:
i1 Y11 u1 i1 R1 Y12 u2
(4-29)
i2 Y21 u1 i1 R1 Y22 u2
Damit ergibt sich für den Strom i1 als Funktion der äußeren Spannungen u1‘ und u2:
i1
Y11
Y12
u1
u2
1 Y11 R1
1 Y11 R1
(4-30)
Mittels Einsetzen von Gleichung (4-30) in Gleichung (4-29) kann der Strom i2 ermittelt werden. Aus
Y Y R
Y Y R
i2 Y21 11 21 1 u1 Y22 11 21 1 u2
1 Y11 R1
1 Y11 R1
(4-31)
folgt
i2
Y R1 det Y
Y21
u1 22
u2
1 Y11 R1
1 Y11 R1
(4-32)
Die resultierende Y-Matrix hat dann die folgende Form:
Y res
Y11
1 Y R
11
1
Y21
1 Y11 R1
Prof. Dr. P. Pogatzki 2013
Y22 R1 det Y
1 Y11 R1
Y12
1 Y11 R1
(4-33)
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-11
Die Matrix aus Gleichung (4-33) beschreibt einen aufgrund der Gegenkopplung modifizierten
Transistor. Der Eingangswiderstand des gegengekoppelten Transistors bei Abschluß mit der
Impedanz ZL bestimmt sich zu1:
re
1 Y22 Z L
Y11 Z L det Y
(4-34)
Ist die Abschlußimpedanz ZL hinreichend groß, so gilt näherungsweise:
re
gCE Gk
Y22
det Y g BE Gk gCE Gk Gk S Gk
(4-35)
Aus gCE Gk folgt die Näherung:
re
g BE
Gk
Gk
Gk Gk Gk S Gk g BE S Gk
(4-36)
Kürzen und erneutes Verwenden von
S g BE
(4-37)
liefert:
re
1
1 g BE
1
1
g BE S
(4-38)
Der Eingangswiderstand hängt also näherungsweise nur noch von der Steilheit S und damit
vom Kollektor-Strom ab und ist somit sehr klein. Bei einem Kollektor-Strom von 25mA wäre
bei einer Temperatur von 290 K der Eingangswiderstand re nur noch 1!
Die Gültigkeit von Gleichung (4-38) soll anhand eines Beispiels überprüft werden.
Es gelte:
Gk
1
500 S
2k
I C 1mA
gCE
1
20 S
50k
Z L 2k
400
(4-39)
1
Siehe Übung
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-12
Der Eingangsleitwert Gin bestimmt sich zu:
Gin
S
IC
100 S
UT
(4-40)
Damit hat die Y-Matrix nach (4-1) die folgende Form:
600 S
39,5mS
Y res
500 S
520 S
(4-41)
Die Auswertung von Gleichung (4-34) ergibt dann einen Eingangswiderstand von
re 50, 09
(4-42)
Die Näherungslösung gemäß Gleichung (4-38) ergibt jedoch:
re 25, 00
(4-43)
Der Unterschied rührt daher, dass das Produkt Y11ZL in Gleichung (4-34) in der Größenordnung von „1“ liegt. Die ermittelte Näherung gilt also nur für „große“ Lastwiderstände. Wird
jedoch der Widerstand R1 in Serie geschaltet und liegt dieser in der Größenordnung einiger
100 Ohm, so bestimmt R1 allein den Eingangswiderstand.
Eine weitere Eigenschaft der Spannungsgegenkopplung ist die näherungsweise Unabhängigkeit der Spannungsverstärkung von Transistoreigenschaften und Lastwiderstand ZL. Für die
Spannungsverstärkung Av gilt allgemein2:
Av
Y21 Z L
1 Y22 Z L
(4-44)
Wird die Spannungsverstärkung der gegengekoppelten Schaltung inklusive des Serienwiderstandes R1 berechnet, so sind die entsprechenden Y-Parameter der gesamten Anordnung zu
verwenden. Unter Verwendung von Gleichung (4-33) führt dieses zu:
Y21
ZL
Y21 Z L
1 Y11 R1
Av
Y R1 det Y
1 Y22 Z L
ZL
1 22
1 Y11 R1
2
(4-45)
siehe Übung
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-13
Ausmultiplizieren und die Verwendung der Näherung
det Y S Gk
(4-46)
liefert für große ZL:
Av
Av
Y21 Z L
1 Y11 R1 Y22 R1 det Y Z L
Y 21 Z L
Y 21
1 Y11 R1 Y22 R1 S Gk Z L
Y22 R1 S Gk
(4-47)
Mit dem Einsetzen der Beziehungen für die Y-Parameter aus Gleichung (4-27) erhält man:
Av
S Gk
Gk gCE R1 S Gk
(4-48)
Bei nicht zu kleinem Kollektor-Strom ist die Steilheit S wesentlich größer als der Leitwert Gk
und R1 S 1 . Ferner kann in der Regel gce gegen Gk vernachlässigt werden. Damit ergibt
sich eine Verstärkung, die nur noch von einem Widerstandsverhältnis abhängt:
Av
R
S
k
R1 S Gk
R1
(4-49)
Die Gültigkeit dieser Näherung soll wieder anhand eines Beispiels überprüft werden. Es gelten noch immer die Zahlenwerte aus Beziehung (4-39). Zusätzlich wurde R1 zu 400 gewählt. Damit ergibt sich näherungsweise eine Spannungsverstärkung
Av
Rk 2000
5 13,98dB
400
R1
(4-50)
Die exakte Rechnung nach Gleichung (4-45) einen Wert von
Av 4, 28 12, 63dB
(4-51)
Für eine überschlagsmäßige Rechnung ist die bestimmte Näherungsbeziehung durchaus ausreichend. Es sollte jedoch immer bedacht werden, dass bei zu starker Belastung (kleines ZL)
der Schaltung die Näherung nicht mehr gültig ist. Ferner muss gewährleistet sein, dass die
Steilheit S deutlich größer als der Leitwert Gk ist.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-14
4.2 Vergleich von Strom- und Spannungsgegenkopplung
Neben den im letzten Abschnitt betrachteten theoretischen Grundlagen der Strom- bzw.
Spannungsgegenkopplung sollen nun die unterschiedlichen Eigenschaften der beiden Schaltungsvarianten anhand mehrerer Experimente untersucht werden.
Zunächst wird die Eingangskennlinie einer Stromgegenkopplung mit RE=400 simuliert.
Bild 4-7: Verhalten der Emitterschaltung mit Stromgegenkopplung,
oben: Schematic für DC-Simulation der Emitterschaltung mit Stromgegenkopplung
unten: Eingangskennlinie der Emitterschaltung
Der Lastwiderstand RL wird wie im letzten Abschnitt zu 2000 gesetzt. Betrachtet man das
Ergebnis in Bild 4-7, so fließt bei einer Basis-Spannung von ca. 1,12V ein Kollektorstrom
von 1mA. Die berechnete Eingangskennlinie mit Stromgegenkopplung unterscheidet sich
aufgrund des Emitter-Widerstandes erheblich von der des nicht gegengekoppelten Transistors. Bei IC=1mA beträgt die Spannung am Emitter-Widerstand 0,4V, für die Basis-EmitterSpannung des Transistors selbst ergibt sich damit ein Wert von 0,72V. Dieser liegt wieder in
der gewohnten Größenordnung.
Für alle weiteren Simulationen wird die Basis-Emitter-Spannung so gewählt, dass ein Kollektor-Strom IC von 1mA fließt.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-15
Bild 4-8: Verhalten der Emitterschaltung mit Spannungsgegenkopplung,
oben: Schematic für DC-Simulation der Emitterschaltung mit Spannungsgegenkopplung
unten: Eingangskennlinie der Emitterschaltung
Die gleiche Simulation wird nun auch für die Spannungsgegenkopplung durchgeführt. Der
Lastwiderstand ist erneut 2000, Rückkopplungswiderstand Rk und Vorwiderstand R1 heben
die gleichen Werte wie im letzten Kapitel. Der theoretische Wert der Spannungsverstärkung
wäre damit 5.
Betrachtet man nun die simulierte Eingangskennlinie in Bild 4-8, so fällt eine erhebliche Abweichung von der des einzelnen Transistors auf. Bereits ab einer Eingangsspannung von ca.
0,2V fließt ein nennenswerter Kollektor-Strom aufgrund des Widerstandnetzwerkes bestehend aus RL, Rk und R1. Bei verschwindender Eingangsspannung liegt die Basis bereits auf
einem Potential von
U BE
U SCR 2
R1 0, 45V
RL Rk R1
(4-52)
Damit ist ein erheblich kleinerer Wert der Eingangsspannung nötig, um einen KollektorStrom von 1 mA zu erzeugen. Mit guter Näherung ist dieses bei einer Eingangsspannung von
0,5 V der Fall.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-16
Bild 4-9: Spannungsverstärkung bei Strom- und bei Spannungsgegenkopplung,
oben: Schematic für AC-Simulation der Stromgegenkopplung mit Ic=1 mA
Mitte: Schematic der Spannungsgegenkopplung mit Ic=1 mA
unten: Spannungsverstärkung als Funktion der Frequenz
Beide Schaltungsvarianten werden nun einer Kleinsignalanalyse (AC-Simulation) unterzogen
und die Spannungsverstärkung für den Frequenzbereich 1kHz bis 1GHz bestimmt. Dabei
zeigt sich, dass die Stromgegenkopplung eine etwas größere Verstärkung aufweist und recht
nahe am theoretischen Wert von 13,98 dB liegt. Ferner ist bei Speisung mit einer idealen
Spannungsquelle die Transitfrequenz (0 dB Verstärkung) der Schaltung mit StromgegenkoppProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-17
lung deutlich größer als die der Schaltung mit Spannungsgegenkopplung. Hingegen liegen die
3dB-Eckfrequenzen mit ca. 89 MHz und ca. 100 MHz nahe beieinander. Während der Simulation wurden beide Schaltungen mit dem gleichen Kollektor-Strom betrieben, um gleiche
Steilheiten zu garantieren. Da in einer realen Schaltungsumgebung keine idealen Spannungsquellen mit dem Innenwiderstand Null vorliegen, ist auch das Verhalten des Eingangswiderstandes von besonderem Interesse.
Bild 4-10: Verlauf des Betrages des Eingangswiderstandes einer Emitter-Schaltung mit Gegenkopplung
Es wurde der frequenzunabhängige Eingangswiderstand für beide Gegenkopplungsarten im
letzten Abschnitt bereits bestimmt. Die Stromgegenkopplung führt zu einem sehr großen und
die Spannungsgegenkopplung zu einem kleinen, in idealer Weise nur von R1 abhängigen,
Eingangswiderstand.
Die Simulationsergebnisse für beide Schaltungsvarianten sind in Bild 4-10 dargestellt. Der
jeweilige Eingangswiderstand wird anhand des simulierten Kleinsignal-Basisstrom mit Hilfe
des ADS-Elementes I_Probe berechnet. Im Fall der Spannungsgegenkopplung ergibt sich
eine Abweichung von ca. 12% vom Näherungswert R1=400. Der Betrag des Eingangswiderstandes ist über den gesamten Frequenzbereich näherungsweise konstant, da die im Transistor vorhandenen parasitären Kapazitäten durch die Parallelschaltung relativ kleiner Widerstände (Eingangswiderstand und Ausgangswiderstand) sich nur schwach auswirken.
Hingegen zeigt die Schaltung mit Stromgegenkopplung eine starke Frequenzabhängigkeit des
Eingangswiderstandes. Bereits bei einer Frequenz von 1MHz ist der Betrag des Eingangswiderstandes auf das 0,707fache des Wertes bei niedrigen Frequenzen abgesunken. Wendet man
wieder die entsprechende Näherungsbeziehung für den Eingangswiderstand an, so ergibt sich
eine Stromverstärkung von ca. 86.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-18
Bild 4-11: Ausgangswiderstand bei Gegenkopplung im Arbeitspunkt Ic=1mA
oben: Schematic für AC-Simulation bei Stromgegenkopplung mit Stromquelle und
DC_Feed
Mitte: Schematic bei Spannungsgegenkopplung mit Stromquelle und DC_Feed
unten: Verlauf des Ausgangswiderstandes bei Gegenkopplung
Auch im Verhalten des Ausgangswiderstandes unterscheiden sich die beiden Varianten. Wie
in den beiden Schematics in Bild 4-11 dargestellt, wird nun eine Stromquelle in den Ausgangszweig gelegt und die Spannungsänderung am Kollektor gemessen. Der Eingang ist während dieser Simulation kleinsignalmäßig kurzgeschlossen. Die ideale Stromquelle wirkt bzgl.
der Gleichspannungseinstellung als Leerlauf und verändert somit den Arbeitspunkt nicht. Da
der Ausgangswiderstand der Spannungsgegenkopplung sehr gering ist, wirkt sich in der SiProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-19
mulation der parallel geschaltete Lastwiderstand RL=2000 nicht aus. Hingegen würde im
Fall der Stromgegenkopplung als Ausgangswiderstand lediglich der Lastwiderstand wirksam
sein, da dieser wesentlich kleiner als der Ausgangswiderstand der Schaltung selbst ist. Daher
wird das ADS-Element DC_Feed eingefügt, welches für Gleichstrom einen Kurzschluß darstellt und für alle anderen Frequenzen als Leerlauf wirkt. So kann die Wirkung des Lastwiderstandes auf den Ausgangswiderstand unterdrückt werden.
Die Simulationen zeigen einen sehr großen Ausgangswiderstand im Fall der Stromgegenkopplung, der jedoch schon bei niedrigen Frequenzen abzufallen beginnt. Demgegenüber
steht der niedrige Ausgangswiderstand der Spannungsgegenkopplung, der bis 30 MHz konstant ist.
4.3 Verstärkungs-Bandbreite-Produkt
Eine wichtige Kenngröße eines Verstärkers ist das Verstärkungs-Bandbreite-Produkt. Es gibt
an, welche Verstärkung bei einer vorgegebenen Bandbreite zu erzielen ist.
Unter der Annahme, dass der Verstärker über einen weiten Frequenzbereich näherungsweise
als ein Tiefpass-System 1. Ordnung beschrieben werden kann, gelten die folgenden Überlegungen. Für die Übertragungsfunktion der Kombination Verstärker/Tiefpaß gilt:
Hf
H0
1 j 2 f
(4-53)
Bei niedrigen Frequenzen ergibt sich die Verstärkung zu:
H f 0 H0
(4-54)
Die 3dB-Grenzfrequenz fg definiert die Bandbreite zu
H fg
H f 0
1
2
fg
1
2
(4-55)
Im in Bild 4-12 dargestellten Beispiel gilt =RC=5ns. Damit beträgt die Grenzfrequenz fg
f g 30 MHz
(4-56)
An der Stelle f=fg beträgt der Phasenwinkel der Übertragungsfunktion -45o. Dieses ist auch in
Bild 4-12 dargestellt. Oberhalb der Grenzfrequenz fällt der Betrag der Übertragungsfunktion
näherungsweise mit 20 dB je Dekade ab.
Wird nun ein Verstärker, der als Tiefpaß-System 1. Ordnung beschrieben werden kann, gegengekoppelt, so ergibt sich für die resultierende Übertragungsfunktion H‘(f):
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
H0
Hf
1 j 2 f
H f
1 k H f 1 k H0
1 j 2 f
H0
1 j 2 f k H 0
4-20
(4-57)
Die Ortskurve der Übertragungsfunktion mit H 0 1 ist im folgenden Bild dargestellt. Es ergibt sich ein Halbkreis in der komplexen Ebene. Verwendet man stattdessen die Darstellung
Betrag/Phase und vergleicht diese mit der Näherung des Bode-Diagramms, so sind insbesondere bei der Phase deutliche Abweichungen über einen weiten Frequenzbereich zu erkennen.
Damit ist bei Einsatz von CAD-Tools die Verwendung von Bode-Diagrammen absolut
sinnlos!
Bild 4-12: links oben: Tiefpaß-System 1.Ordnung,
rechts oben: Ortskurve der Ausgangsspannung des Tiefpasses
links unten: Betrag der Ausgangsspannung im doppelt-logarithmischen Maßstab
(Bode-Diagramm)
rechts unten: Phase der Ausgangsspannung im logarithmischen Maßstab
Die Zurückführung auf ein Tiefpass-System 1. Ordnung liefert dann ein System mit modifizierter Grenzfrequenz und modifizierter Verstärkung. Es ergibt sich:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
H f
Rückkopplung
H0
1 k H0
1 j 2 f
4-21
H 0
1 j 2 f
(4-58)
1 k H0
Der rückgekoppelte Verstärker stellt also wieder ein Tiefpaß-System 1. Ordnung dar. Jedoch
sind die Verstärkung bei niedrigen Frequenzen H‘0 und die Zeitkonstante um den gleichen
Faktor verringert worden. Dieser Sachverhalt führt zur Definition des VerstärkungsBandbreite-Produktes GBW (Gain-Band-Width). Es gilt für den nicht rückgekoppelten Verstärker:
H0
2
(4-59)
H0
1
1 k H 0 2
(4-60)
GBW H 0 f g
Für das rückgekoppelte System ergibt sich:
GBW H 0 f g
Einsetzen führt zu:
GBW
H0
H
1
0 GBW
1
1 k H 0 2
2
1 k H0
(4-61)
Das Produkt aus Verstärkung und Bandbreite ist also konstant und invariant gegenüber einer
frequenzunabhängigen Gegenkopplung. Jedoch kann durch Rückkopplung die Bandbreite
auf Kosten der Verstärkung vergrößert werden. Dieser Sachverhalt ist im folgenden Bild dargestellt.
Gegeben ist ein Operationsverstärker (OP), der hier allein durch seine Leerlaufverstärkung
H0=Gain, seine Transitfrequenz fT (BW) mit
H 0 fT 1
(4-62)
und seinem Ausgangswiderstand beschrieben wird. Der Eingangswiderstand ist unendlich.
Verstärkt wird die Differenz der Eingangsspannungen V+ und V-. Damit kann auf einfache
Weise eine Rückkopplung erzeugt werden. Ansonsten wird der OP als spannungsgesteuerte
Spannungsquelle und Tiefpaß 1. Ordnung behandelt.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-22
Bild 4-13: Operationsverstärker als Tiefpaß 1. Ordnung, DC-Leerlaufverstärkung:
H0=100 dB, Bandbreite fT=100 MHz
links oben: Schaltung des nicht rückgekoppelten Verstärkers, fg=1 kHz
rechts oben: Rückgekoppelter Verstärker, k=1/10, fg=7,94 MHz
unten: Beträge der Verstärkungen im doppelt-logarithmischen Maßstab (BodeDiagramm) und Phasenverläufe der Verstärkungen logarithmischen Maßstab
Es ergibt sich die in Bild 4-13 dargestellte Übertragungsfunktion. Die 3dB-Grenzfrequenz des
nicht rückgekoppelten Verstärkers liegt bei f g 1kHz . Wird nun 1/10 der Ausgangsspannung
auf den Eingang zurückgeführt, so erhält aufgrund der großen Verstärkung H0:
H 0
H0
H0
1
lim
10
1 k H 0 H 0 1 k H 0 k
(4-63)
Aus den zuvor gemachten Überlegungen folgt nun für die neue Grenzfrequenz
f g f g 10
100 dB 20 dB
20 dB
f g 104 10 MHz
(4-64)
Da sich aufgrund des Rückkopplungsnetzwerkes die Belastungsverhältnisse am Ausgang des
OP geändert haben, ergibt sich eine etwas kleinere Grenzfrequenz von f‘g=7,94 MHz. Oberhalb der neuen Grenzfrequenz verhält sich der Betrag der Übertragungsfunktion H‘(f) wie der
des nicht rückgekoppelten Systems.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-23
4.4 Stabilität rückgekoppelter Systeme
Neben den zuvor besprochenen positiven Aspekten der Rückkopplung gibt es auch den häufig
unerwünschten Effekt, dass die Stabilität eines Netzwerkes beeinflusst wird. Ein Netzwerk
gilt dann als stabil, wenn die folgende Beziehung für die reelle Stoßantwort h(t) gilt:
h 2 t dt M
M
(4-65)
Ein stabiles LTI-System reagiert damit auf einen Dirac-Stoß mit einer Stoßantwort, die eine
endliche „Energie“ aufweist. Der Grenzfall der Stabilität ist der ideale Integrator. Dieser
hat den Einheitssprung (t) als Stoßantwort und ist damit nach obiger Definition nicht mehr
stabil.
Die klassische komplexe Wechselstromrechnung kann jedoch nur eingeschwungene und lineare Systeme beschreiben. Daher bietet es sich an, statt der Fourier-Transformation die Laplace-Transformation zur Beschreibung linearer Systeme zu verwenden. Es ist aus der LaplaceTransformation bekannt, dass die Lage der Polstellen der komplexen Übertragungsfunktion
H(s) das Stabilitätsverhalten bestimmt. Diese Übertragungsfunktion wird berechnet aus der
kausalen Stoßantwort h(t) mittels
H s h t e st dt
(4-66)
s j
(4-67)
0
Dabei ist
Transformiert man einige gängige kausale Zeitfunktionen, so erhält man folgende Tabelle:
h t
H s
t n e t , , n 0,1, 2,...
sin t
cos t
e t sin t
e t cos t
Prof. Dr. P. Pogatzki 2013
Bemerkung
n!
s
Pol bei s , instabil für 0
n 1
Konjugiert komplexe Pole bei
s j , instabil für 0
s
s
s2 2
2
2
Konjugiert komplexe Pole bei
s j , instabil
s
2
2
s
s
2
2
Konjugiert komplexe Pole bei
s j , instabil für 0
Konjugiert komplexe Pole bei
s j , instabil für 0
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-24
Existieren Polstellen in der geschlossenen rechten Halbebene, so ist das System instabil. Dieses ist anhand der obigen Tabelle sofort ersichtlich.
Kann das System harmonische Schwingungen ausführen, so sind immer konjugiert komplexe Pole vorhanden.
Die mit Hilfe der Laplace-Transformation getroffenen Überlegungen sollen nun auf die YParameter eines Vierpols angewandt werden.
Dazu wird die Eingangsimpedanz eines Vierpols betrachtet. Es wird ferner vereinfachend
aber ohne Beschränkung der Allgemeinheit angenommen, dass der Vierpol auf der Ausgangsseite leerläuft. D. h., der Strom I2 ist identisch Null. Es gilt dann:
I1 Y11 U1 Y12 U 2
(4-68)
I 2 Y21 U1 Y22 U 2 0
Ersetzen des Stromes I 2 liefert:
I1 Y11 U1 Y12
Y21
U1
Y22
(4-69)
det Y
Y
Y11 Y12 21 U1
U1
Y
Y
22
22
Damit ergibt sich der Eingangswiderstand Zin bzw. analog der Ausgangswiderstand Zout zu:
Z in
I2 0
U1
Y22
I1 det Y
Z out
I1 0
U2
Y11
I 2 det Y
(4-70)
Entsprechend gilt für den Eingangsleitwert Yin bzw. für den Ausgangsleitwert Yout:
Yin
det Y
I1 det Y
I
Yout 2
U1
Y22
U2
Y11
(4-71)
Z in , , Yout können nun wieder (siehe Kapitel 2) als komplexe Übertragungsfunktionen betrachtet werden. Sind die Y-Parameter frequenzabhängig, so haben Ein- und Ausgangswiderstand bzw. Ein- und Ausgangsleitwert bei den gleichen Frequenzen Pol- bzw. Nullstellen.
Beispielhaft wird nun angenommen, dass das rückgekoppelte System an seinen Ausgangsklemmen in einer hinreichend kleinen Umgebung um eine gegebene Frequenz mittels eines Ersatzschaltbildes „Parallelschwingkreis“ beschrieben werden kann. Die Darstellung „Parallelschwingkreis“ wird als Kleinsignalbeschreibung verstanden! Zunächst werden die Eigenschaften des Systems mittels der Laplace-Transformation analysiert, um dann den Übergang zu den Y-Parametern zu vollziehen!
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-25
Bild 4-14: Leerlaufender Parallelschwingkreis
Es gilt für die Ausgangsspannung bzw. Ausgangsstrom die folgende Gleichung:
iout G uout C
duout 1
uout dt
dt
L
(4-72)
Differenzieren nach der Zeit liefert eine lineare homogene DGL 2. Ordnung.
1
iout G uout C uout uout
L
(4-73)
Die Anwendung der Laplace-Transformation
iout t I out s
(4-74)
uout t U out s
ergibt dann für die angenommene Randbedingung uout 0 uout 0 0 :
1
U out s I out
L
1
U out C s 2 G s s I out
L
G s U out C s 2 U out
(4-75)
Damit lautet die komplexe Übertragungsfunktion H(s):
H s
U out s
s
I out s C s 2 G s 1
L
(4-76)
Die Anpassung der Darstellung auf Elemente der Tabelle der Laplace-Transformierten ergibt:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
H s
4-26
1
s
C s2 G s 1
C
LC
(4-77)
Der Vergleich mit den Beispielen zur Laplace-Transformation aus der zuvor vorgestellten
Tabelle führt auf:
H s
1
s
2
C
2
s G 1 G
LC 4C 2
2
C
2
(4-78)
Dabei entspricht der Ausdruck
02
1
LC
(4-79)
der Resonanzfrequenz des ungedämpften Parallelschwingkreises. Daher kann obige Gleichung umgeschrieben werden zu:
H s
1
s
2
C
s 1 2 1
0 2
2 2
(4-80)
Als Zeitfunktion stellt sich damit ein Produkt aus Winkelfunktion mit Exponentialfunktion
ein. Jedoch entspricht das obige Ergebnis keiner Standardlösung aus der besprochenen Tabelle. Es wird daher der folgende Ansatz gewählt:
H s
s
s
A
2
2
s
s 2
2
Typ cos
Prof. Dr. P. Pogatzki 2013
B
(4-81)
s 2
2
Typ sin
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-27
Infolge der gleichen Nenner gilt daher:
As B s
(4-82)
Daraus folgt trivialer Weise:
A 1 B
(4-83)
Einsetzen liefert:
1
s
H s
1
2
2
2
2
C s
s
Typ e cos
Typ e sin
(4-84)
Damit lautet die Stoßantwort nach Rücktransformation in den Zeitbereich:
e t
h t
C
cos
sin
t
t
e t
C
cos
sin
t
t
(4-85)
Dabei gilt:
G
2C
1
G2
4C G 2 L
LC 4C 2
4 LC 2
(4-86)
Es ergibt sich damit eine Lösung, die aus dem Produkt e-Funktion mit harmonischen Funktionen besteht. Je nach Wahl der Konstanten und (bzw. ) ergeben sich deutlich unterschiedliche Lösungstypen. U. a. kann die Kreisfrequenz imaginär werden. Diese werden
nun in Fallunterscheidungen untersucht. Zunächst wird Verlustfreiheit angenommen.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-28
G=0:
In diesem Fall liegt ein verlustloser Parallelschwingkreis vor. Es gilt für die Konstanten
0
1
0
LC
(4-87)
Daraus folgt für die Übertragungsfunktion:
H s
1
s
2
C s 02
(4-88)
Die Übertragungsfunktion hat zwei konjugiert komplexe Polstellen mit
s1 j0
s2 j0
(4-89)
Dabei bezeichnet 0 die Resonanzfrequenz des ungedämpften Schwingkreises. Kennzeichnet
man Pol- und Nullstellen in der komplexen Ebene, so erhält man das PN-Schema. Dabei werden üblicherweise Pole mit einem Kreuz und Nullstellen mit einem Kreis gekennzeichnet.
Bild 4-15: PN-Schema der Übertragungsfunktion H(s) mit G=0
Für die zugehörige Stoßantwort gilt in diesem Fall:
e 0t
h t
C
cos 0t
0
cos
t
sin
t
C
(4-90)
Das System führt nach Anregung ungedämpfte harmonische Schwingungen mit der Kreisfrequenz 0 aus!
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-29
4C G 2 L, G 0 :
In diesem Fall ist reell, es ist eine harmonische Schwingung zu beobachten. Auch jetzt
sind wieder konjugiert komlexe Polstellen vorhanden, deren Lage wird nun durch das Vorzeichen von G bestimmt.
1
G
s1 j
j
2C
(4-91)
1
G
s2 j
j
2C
(4-92)
Für ein positives G ergibt sich eine exponentiell gedämpfte Schwingung, für ein negatives
G ergibt sich eine exponentiell wachsende Schwingung. Es ist zu beachten, dass jetzt
0
(4-93)
gilt. Das entsprechende PN-Schema sieht wie folgt aus:
Bild 4-16: PN-Schema der Übertragungsfunktion H(s) mit G 0 und 4C G 2 L
Das System ist damit im Fall eines negativen Leitwerts instabil!
4C G 2 L, G 0 :
In diesem Fall ist 0 und daher ist
2
2
1
G
s
s
0
2
C
(4-94)
Aufgrund des Quadrates handelt es sich um eine reelle doppelte Polstelle bei
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
s1,2
4-30
G
2C
(4-95)
Das zugehörige PN-Schema ist in der folgenden Abbildung dargestellt. Je nach Vorzeichen
von G kann zwischen einem stabilen und einem instabilen Bereich unterschieden werden.
Bild 4-17: PN-Schema der Übertragungsfunktion H(s) mit G 0 und 4C G 2 L
Die Berechnung der Stoßantwort erfolgt mittels Grenzwertbildung:
e t
lim cos t sin t
h t
C 0
sin t
e t
1 lim
0
C
(4-96)
Die Anwendung der Regel von L`Hospital zur Grenzwertberechnung führt dann zu:
e t
h t
C
t cos t
1 lim
0
1
t
G
t
2C
(4-97)
e
e
G
1 t
1
t
C
C 2C
Je nach Vorzeichen von G liegt ein exponentiell wachsendes bzw. fallendes Signal als Stoßantwort vor. Dieser Sachverhalt ist in der folgenden Grafik veranschaulicht. Ein negativer
Leitwert G führt erneut zur Instabilität!
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-31
Bild 4-18: Verlauf der normierten Stoßantwort für G 0 und 4C G 2 L ,
links: stabiles Verhalten für 1
rechts: instabiles Verhalten für 1
4C G 2 L, G 0 :
Wegen
G
2C
1
G2
LC 4C 2
(4-98)
gilt nun
G2
2 02 2
4C
2
0
(4-99)
j 2 02 j
An dieser Stelle ist es sinnvoll, statt der Variable wieder die ursprüngliche Größe zu
verwenden, da eine Frequenz im klassischen Sinn nun nicht gegeben ist. Aufgrund des Ausdrucks unter der Wurzel gilt daher
(4-100)
Bestimmt man nun wieder die Polstellen der Übertragungsfunktion, so erhält man:
s 2 0
2
s 2
2
(4-101)
Damit sind nun die Polstellen
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-32
s j j
(4-102)
s
Aufgrund der Größenordnung gemäß Gleichung (4-100) liegen beide Polstellen in der gleichen Halbebene. Allein das Vorzeichen von (und damit das Vorzeichen von G) bestimmt
die Halbebene und damit die Stabilität der Anordnung!
Da keine konjugiert komplexen Pole vorliegen, sind in der Stoßantwort keine harmonischen
Anteile zu erwarten. Im Zeitbereich wird aus
e t
h t
C
cos
sin
t
t
(4-103)
Bild 4-19: PN-Schema der Übertragungsfunktion H(s) mit G 0 und 4C G 2 L
nun
e t
h t
C
cos
sin
j
t
j
t
(4-104)
Der Cosinus eines rein imaginären Argumentes ist jedoch gegeben durch
cos j t cosh t
(4-105)
sin j t j sinh t
(4-106)
Analog gilt:
Damit wird aus Gleichung (4-104):
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
cosh t
e t t
t
e e
2C
1 t
e
1
2C
e t
h t
C
Rückkopplung
4-33
j sinh t
j
t
t
e e
(4-107)
t
1
e
Auch aus der Stoßantwort ist wegen der Gültigkeit von (4-100) sofort ersichtlich, dass für ein
negatives (entspricht G) das System instabil und für ein positives das System stabil ist.
Ist das System instabil, genügt die kleinste Anregung (z. B. Rauschen, Einschalten der Speisespannung, etc.), um das instabile Verhalten auszulösen. Ein Dirac-Stoß ist dafür nicht erforderlich.
Instabiles Verhalten ist immer dann gegeben, wenn der Leitwert G negativ ist. Die Art
der Instabilität variiert je nach Größe der Parameter L und C.
In der Praxis ist jedoch die Verwendung der Laplace-Transformation nur selten möglich. Es
soll nun untersucht werden, wie bei einer Rückführung auf die Fourier-Transformation Aussagen über die Systemstabilität getroffen werden können. Dazu werden nun wieder die zu
Beginn des Abschnitts verwendeten Y-Parameter herangezogen.
Einige der betrachteten Stabilitäts-Szenarien sollen nun anhand eines stark vereinfachten Beispiels untersucht werden. Dazu wird ein Verstärker betrachtet, der allein durch seine YMatrix beschrieben wird und der am Ausgang mit einem Parallelschwingkreis belastet ist. Der
Verstärker ist infolge von Rückkopplungen nicht rückwirkungsfrei und hat die in Bild 4-20
angegeben Y-Matrix. Die Steilheit sei variabel.
Bild 4-20: Mit Parallelschwingkreis beschalteter Verstärker mit nicht verschwindender Rückwirkung und variabler Steilheit, Resonanzfrequenz des Schwingkreises ist
f0=500MHz
Wird die in Bild 4-20 dargestellte Schaltung einer Kleinsignalanalyse für verschiedene Werte
von Y21 (entspricht der Steilheit im Fall eines Transistors) unterzogen, so erhält man die in
den folgenden Bildern dargestellten Y-Parameter Yin und Yout. Diese sind ÜbertragungsfunkProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-34
tionen infolge einer Fourier-Transformation. Für den Fall der Resonanz ergibt sich in diesem
Fall:
Yout Yin
det Y 1S 1S 1S Y21
1S Y21
Y22
1S
(4-108)
Für sehr große und für sehr kleine Frequenzen erzeugt der Parallelschwingkreis einen Kurzschluss und der Eingangsleitwert Yin geht gegen Y11=1S bzw. geht der Imaginärteil des Ausgangsleitwertes gegen unendlich.
Zunächst wird das System für eine kleine Steilheit untersucht. Mit Y21=0,5 S ergibt sich im
Resonanzfall nach Gleichung (4-108) ein Yin=Yout=0,5 S. Die Simulationsergebnisse für den
Frequenzbereich 100 MHz bis 1 GHz sind in Bild 4-21 dargestellt. Wie zu erkennen ist, sind
die Realteile der Leitwerte Yin und Yout jedoch bei allen Frequenzen positiv, das System ist
stabil. Die Ortskurven der Leitwerte verlaufen für den gesamten Frequenzbereich in der rechten komplexen Halbebene.
Bild 4-21: Auswirkung des Parameters Y21 auf dieLeitwerte Yin und Yout,
links: Real- und Imaginärteil von Yin und Yout für Y21=0,5 S
rechts: Ortskurve des Eingangsleitwertes und des Ausgangsleitwertes
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-35
Aus Gleichung (4-71) folgt, dass für Y21=1 S die Determinante bzw. die Leitwerte eine reelle
Nullstelle aufweisen. Diese Nullstelle befindet sich bei f=f0=500 MHz. Die Verläufe der Imaginär- und Realteile der Leitwerte Yin und Yout sowie die zugehörigen Ortskurven in der komplexen Ebene für diese Steilheit sind in Bild 4-22 zu sehen. Es ergeben sich wieder die gleichen Grenzen für Yin und Yout für sehr kleine bzw. sehr große Frequenzen wie im Fall
Y21=0,5 S. Die Ortskurve für den Ausgangsleitwert liegt nun auf der imaginären Achse. Das
System ist damit verlustlos und kann damit bei geeigneter Anregung ungedämpfte harmonische Schwingungen bei 500 MHz ausführen. An dieser Stelle weist auch der Eingangsleitwert
eine Nullstelle auf und nur dort verschwindet der Realteil des Leitwertes.
Bild 4-22: Auswirkung des Parameters Y21 auf den Eingangsleitwert Yin,
links: Real- und Imaginärteil von Yin und Yout für Y21=1,0 S
rechts: Ortskurve des Eingangsleitwertes und des Ausgangsleitwertes
Wird die Verstärkung (entspricht der Steilheit Y21) auf 1,5S erhöht, so stellen sich im Resonanzfall Leitwerte mit negativem Realteil ein. Die entsprechenden Simulationsergebnisse sind
in Bild 4-23 dargestellt. Das System würde auf eine kleine Anregung mit einem exponentiell
wachsenden Ausgangssignal reagieren. Damit ergibt sich ein instabiles Verhalten. Betrachtet
man die Ortskurve des Eingangsleitwertes Yin, so fällt auf, dass diese für einen weiten FreProf. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-36
quenzbereich sich in der linken Halbebene der komplexen Ebene befindet. Die Ortskurve des
Ausgangsleitwertes befindet sich sogar für alle Frequenzen in der linken Halbebene und der
Realteil des Leitwertes ist daher immer negativ. Bei entsprechender Beschaltung am Ausgang
mit verlustlosen Blindleitwerten können somit auch andere Schwingfrequenzen als die 500
MHz generiert werden.
Bild 4-23: Auswirkung des Parameters Y21 auf den Eingangsleitwert Yin,
links: Real- und Imaginärteil von Yin und Yout für Y21=1,5 S
rechts: Ortskurve des Eingangsleitwertes und des Ausgangsleitwertes
Diese Fälle sollen nun unter Kenntnis der zuvor durchgeführten Kleinsignal-Analysen mittels
einer Zeitbereichs-Analyse weiter untersucht werden. Diese Zeitbereichs-Analyse berechnet
die zugehörige Stoßantwort durch Lösen der das System beschreibenden DifferentialGleichungen. Dieser Simulations-Modus wird beispielsweise von PSPICE verwendet und in
ADS als Transienten-Analyse bezeichnet.
Als Schaltung wird nun die Struktur in Bild 4-24 verwendet. Um das in der Realität vorhandenen begrenzende Verhalten einer elektronischen Schaltung näherungsweise zu simulieren,
wurde dem Schwingkreis eine Diode parallelgeschaltet. Um das System anzustoßen, wird auf
den Eingang ein Stromimpuls der Dauer 1 ns gegeben. Dieser entspricht in seiner Struktur
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-37
zwar nicht einem Dirac-Stoß, aber nähert diesen bei den hier vorhandenen Randbedingungen
relativ gut an. Es wird eine Stromquelle verwendet, da diese nach Beendigung des Impulses
die zu Beginn beschriebene Leerlaufbedingung erfüllt.
Bild 4-24: Simulationsanordnung mit Begrenzerschaltung (Diode) zur Ermittlung des transienten Verhaltens für verschiedene Werte der Verstärkung, Resonanzfrequenz
f0=500 MHz, Anregung des Verstärkers mittels Stromimpuls der Dauer 1 ns
Zunächst wird mit dem vermeintlich stabilen Fall und Y21=0,5 S begonnen. Der Realteil des
Ausgangsleitwertes ist stets positiv (siehe Bild 4-21) und das System reagiert auf den Stromimpuls mit einer abklingenden Schwingung, wie in Bild 4-25 zu sehen ist.
Bild 4-25: Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung Y21=0,5 S;
Realteil der Eingangsimpedanz > 0
Im zweiten Beispiel ergibt sich mit Y21=1 S der Leitwert G=0. Die Schaltung führt nun ungedämpfte Schwingungen mit f=500 MHz aus. Dieses Simulationsergebnis ist im folgenden
Bild dargestellt.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-38
Bild 4-26: Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung Y21=1,0S;
Realteil der Eingangsimpedanz = 0
Um die Annahme der Schwingfrequenz zu überprüfen, wurden die Ergebnisse aus Bild 4-26
über einen kürzeren Zeitraum (0...10ns) in Bild 4-27 nochmals dargestellt und die Periodendauer bestimmt. Mit T=2ns ergibt sich erwartete Schwingfrequenz von 500 MHz.
Bild 4-27: Zeitlich „gezoomte“ Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung
Y21=1,0 S; Periodendauer der Schwingung = 2 ns f0=500 MHz
Im folgenden Bild wurde dann die Verstärkerschaltung mit einer Steilheit Y21=1,1 S simuliert. Dieses führt zu einem leicht negativem Leitwert G und es ergibt sich dem Anstoßen der
Schaltung ein leichtes exponentielles Wachstum des Ausgangssignals.
Innerhalb des Simulationszeitraumes von 50 ns ist die begrenzende Wirkung der Diode aufgrund der kleinen Ausgangsspannung von maximal 75 mV nicht zu bemerken.
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-39
Bild 4-28: Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung Y21=1,1 S;
Realteil der Eingangsimpedanz < 0 ; exponentiell wachsende Schwingung
Wird jedoch Y21 zu 1,5 S gesetzt (Situation in Bild 4-23), ergibt sich das Verhalten in Bild
4-29. Das Signal steigt zunächst exponentiell an um dann bei einem positiven Wert von etwa
0,8 V durch die Diode begrenzt zu werden. Das sich dann ergebende Signal ist nicht mehr
sinusförmig und enthält entsprechend Oberwellen.
Das Verhalten des Systems entspricht dann dem eines klassischen Oszillators.
Bild 4-29: Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung Y21=1,5 S;
Realteil der Eingangsimpedanz < 0 ; exponentiell wachsende Schwingung mit
Begrenzung der Ausgangsspannung auf etwa 0,8 V infolge parallel geschalteter
Diode
Wird nun die Steilheit so groß gemacht, dass die Eigenwerte reell sind, so ergibt sich ein exponentielles Wachstum des Ausgangssignals ohne harmonische Komponente. Die Grenze
dafür liegt bei
G
2C
2
1
0
LC
(4-109)
Umstellen liefert:
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
G
2C
2
4-40
1
LC
(4-110)
Bzw. gilt:
G 2C
1
C
2
LC
L
(4-111)
Da G negativ sein soll und sich auch nach Gleichung (4-108) bestimmt, ergibt sich:
1S Y 21 G 2
C
L
(4-112)
Damit liegt die gesuchte Grenze im vorliegenden Fall bei:
Y 21 1S 2
C
1013,2pF
1S 2
7,366 S
L
0,1nH
(4-113)
Simuliert man nun die Schaltung mit einem Wert oberhalb dieser Grenze (z. B. Y21=7,5 S),
so ergibt sich das Ergebnis in Bild 4-30. Um das grenzenlose Ansteigen des Ausgangssignals
zu demonstrieren, wurde in diesem Fall die begrenzende Diode entfernt.
Bild 4-30: Impulsantwort des Verstärkers aus Bild 4-24 für Verstärkung Y21=7,5 S;
Realteil der Eingangsimpedanz << 0 ; exponentiell wachsendes Ausgangssignal
ohne Schwingungskomponente; keine Begrenzung, da die Diode entfernt wurde
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf
Schaltungen & Systeme
Rückkopplung
4-41
Bild 4-31: Simulationsanordnung mit Begrenzerschaltung (anti-parallele Dioden) und verlustbehafteter Spule zur Ermittlung des transienten Verhaltens, f0=500 MHz,
Anregung des Verstärkers mittels Stromimpuls der Dauer 1 ns, Y21=7,5 S;
Wird die Schaltung nun mit zwei anti-parallelgeschalteten Dioden simuliert und die Spule mit
einem kleinen Verlustwiderstand von 1 versehen um realistischere Ergebnisse zu erhalten,
so erhält man die Schaltung in Bild 4-31. Simuliert man diese Struktur nun wie gehabt, so
ergeben sich die Ergebnisse in Bild 4-32. Dabei wurden einmal ein positiver und einmal ein
negativer Stromimpuls zur Anregung verwendet. Die Schaltung zeigt dabei zwei „stabile“
Zustände in dem Sinn, dass sie keine Schwingungen ausführt. Ein derartiges System wird
auch als bi-stabil bezeichnet. Im Sinne des zu Beginn gemachten Stabilitätskriteriums ist die
Schaltung jedoch instabil.
Bild 4-32: „Bi-stabile“ Impulsantwort des Verstärkers aus Bild 4-31 für Y21=7,5S;
links: positiver Stromimpuls,
rechts: negativer Stromimpuls
Prof. Dr. P. Pogatzki 2013
FH-Düsseldorf