Physik für Biologinnen und Biologen (Biologische Physik) W.W.
Werbung
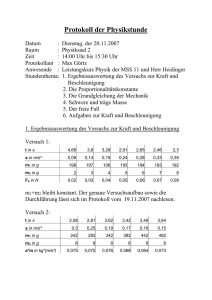
 W.W.")
Physik für Biologinnen und Biologen (Biologische Physik) W.W. Szymanski Vorlesungszeit: Di. 13:15 – 15:55 Vorlesungsort: HS C1, Uni Campus, Spittalgasse Für laufenden alle Informationen bez. LV: http://biologische-physik.univie.ac.at/ VORLESUNGSINHALT: • • • • • • • • • • • • • EINFÜHRUNG – WAS IST PHYSIK, PHYSIKALISCHE GRÖSSEN UND EINHEITEN GRUNDZÜGE DER MECHANIK ELASTIZITÄT UND FESTIGKEIT MECHANIK DER FLÜSSIGKEITEN UND GASE OBERFLÄCHENSPANNUNG GRÖSSENVERÄNDERUNG – CHARAKTERISTISCHE PARAMETER SCHWINGUNGEN UND WELLEN GRUNDBEGRIFFE DER AKUSTIK – SCHALL UND HÖREN WÄRMELEHRE – TEMPERATUR, AGGREGATZUSTÄNDE, HAUPTSÄTZE ELEKTRISCHE UND MAGNETISCHE PHÄNOMENE, ELEKTRISCHE STRÖME GEOMETRISCHE OPTIK, SEHEN, WELLENOPTIK UND STRAHLUNGSGESETZE ELEKTRONENSTRAHLEN, ELEKTRONENMIKROSKOP ATOMKERN, RADIOAKTIVITÄT UND WECHSELWIRKUNG MIT MATERIE 1 Zwischen Belebtem und Unbelebtem „Immer wieder haben sich Physik und Biologie in der Vergangenheit getroffen, aber auch wieder voneinander entfernt. Gerade in den letzten Jahrzehnten sind sie sich zunehmend näher gekommen, so dass eine enge und fruchtbare Zusammenarbeit entstanden ist“. „Die Physik ist die Wissenschaft der unbelebten Materie. Doch führen physikalische Entdeckungen immer wieder zu Entwicklungsschüben in der Biologie und Medizin, den Wissenschaften vom Leben“. (aus „Welt der Physik“, DPG, 2005) Lotuseffekt Mikro- und Nanostrukturierte hydrophobe Oberflächen sind selbstreinigend ! Die Ursache des Effekts liegt in der Oberflächenstruktur der Pflanzen. Durch die Oberflächenstruktur der Pflanzen werden gegenüber Wasser riesige Kontaktwinkel erreicht (Superhydrophobie) - nur etwa 2 bis 3 % der Tropfenoberfläche haben Kontakt mit der Oberfläche der Pflanze, so dass das Wasser leicht abperlen kann. Aufliegende Schmutzpartikel werden dadurch mitgerissen und weggespült. Wassertropfen haben wie alle Flüssigkeiten die Tendenz zur Minimierung ihrer Oberfläche → Oberflächenspannung. Heute werden mittels Nanotechnologie superhydrophobe Beschichtungen etwa für Hochhäuser verwendet. 2 Aus Protein erzeugt – elastischer „Biostahl“ - Spinnennetz Hier wirken Kräfte ! Fadenstärke – ca. 1 – 3 Mikrometer Besitzen größere Festigkeit uns sind elastischer als vergleichbare Objekte aus Edelstahl Druckfestigkeit von Eichenholz – ca. 50N / mm2 Zugfestigkeit von Spinnenseide – ca. 150N / mm2 Horizontaler Wurf Wurfweite (m) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 0 -1 Höhe (m) -2 -3 -4 -5 -6 -7 -8 -9 -10 Als Schleuderfrüchte werden Früchte bezeichnet, die durch Schleudereinrichtungen ihre Samen in einem weiten Umkreis um die Mutterpflanze verbreiten. Die Samen werden von der reifen Frucht fortgeschleudert. Der Sumpf-Storchschnabel liegt bei einer Wurfweite von rund 2,50 m. Gegen das Ende der Messlatte liegen Lupine (7,00 m), Stachelbärenklau (9,50 m), Zaubernuss (15,00 m). 3 Die ersten Mikro- und Nanomotoren wurden von der Natur „gebaut“ - Flagellum Rotationsgeschwindigkeiten – einige Hundert bis Tausend Umdrehungen / Minute „Reise“-Geschwindigkeiten – etwa 20 Mikrometer / Sekunde Flagellum Rotor: Access Research Network (Art Battson) Weibel, D.B. et al. (2005): Microoxen: microorganisms to move microscale loads. Proc. Natl. Acad. Sci. USA 102: 11963–11967 Physik und ihre Aufgabe Physik ist die Wissenschaft von den Naturdingen (gr. - φυσικα), also eine Naturwissenschaft. Physik beschäftigt sich mit der Beobachtung der unbelebten Natur, obwohl viele Erkenntnisse und Gesetzmäßigkeiten auch in der belebten Natur Anwendungen finden. Physik führt Konzepte wie etwa Länge, Masse, Zeit oder Temperatur ein und definiert diese über bestimmte Messvorschriften. Diese so genannten Grund- oder Basisgrößen sind von unseren Erfahrungen inspiriert. Physik ist eine Erfahrungswissenschaft. Sie bezieht ihre Erkenntnisse aus Beobachtungen und einer Interaktion: Experiment – Modell – Simulation – Theorie. Physik ist eine quantitative Wissenschaft – die Merkmale der beobachteten Vorgänge werden Größen genannt. 4 Gründer der klassischen Physik Galileo Galilei (1564- 1642) Isaac Newton (1642-1727) Professor für Mathematik, Physiker Professor für Mathematik und Physik, Cambridge Fall-, Wurf- und Pandelgesetze, Zeitmessung Mechanik (Axiome) Astronomische Beobachtungen Folgerung über die Bewegung der Erde Gravitationsgesetze Optik Infinitesimalrechnung Messung ⇔ Objektive Aussage 5 Messung ⇔ Objektive Aussage Messung ⇔ Objektive Aussage Konzentriere Dich auf das Kreuz in der Mitte. Was passiert mit den rosa Punkten ? 6 Messung ⇔ Objektive Aussage Mondgröße Der Mond (Sonne) scheint knapp über dem Horizont wesentlich größer zu sein als im Zenit. Wesentlich für die korrekte Größenwahrnehmung eines Gegenstandes ist die ebenso korrekte Information über dessen tatsächliche Entfernung zum Beobachter Da zwischen Mond am Horizont und Betrachter viel mehr Gegenstände (Bäume, Häuser, etc.) liegen („Tiefeninformation“) als zwischen Mond oben am Himmel und Betrachter, wird die Entfernung fälschlicherweise als größer eingeschätzt, bei größerer Entfernung und gleich großer Abbildung auf der Netzhaut müsste der Gegenstand aber größer sein, und somit wird der Mond oder auch die Sonne am Horizont auch größer wahrgenommen (Größentäuschung). 7 Masse → 2 kg; Länge → 7 m Messgrößen Physikalische Größe Einheit → Zahl und (Maß)-Einheit willkürlich: Armlänge, Äquatorlänge,... gegeben durch Normale natürlich: Maßsystem → Wellenlänge von Spektrallinien, ... gegeben durch Naturgesetze Menge von Grundgrößen mit Einheiten Basisgrößen Grundgrößen (Definition willkürlich / natürlich) Reduzible Größen (Zurückführbar auf Basisgrößen) GRUNDGRÖSSEN (7 + 2) Radiant Der Radiant (rad) - ebener Winkel zwischen zwei Radien eines Kreises, die aus dem Kreisumfang einen Bogen der Länge des Radius ausschneiden. Steradiant Der Steradiant (sr) - räumlicher Winkel, dessen Scheitelpunkt im Mittelpunkt einer Kugel liegt und der aus der Kugeloberfläche eine Fläche gleich der eines Quadrats von der Seitenlänge des Kugelradius ausschneidet. 8 Grundgrößen Si-Einheit Größe Zeiche n Name Definition Zeit s Sekunde 1 s ist die Zeit für 9192631770 Perioden einer bestimmten Schwingung des Isotops von Cs-133 Länge m Meter 1 m ist die Strecke, die das Licht im Vakuum in der Zeit von 1/299792458 s zurücklegt kg Kilogramm Ur-Kilogramm, aufbewahrt im Bureau International des Poids et Mesures in Paris Sèvres Masse Grundgrößen Si-Einheit Größe Stromstärke Lichtstärke Zeiche n A cd Name Definition Ampere Die Stromstärke in zwei parallelen Leitern im Abstand von 1m beträgt 1 A, wenn die Ströme, bezogen auf die Länge 1m, die Kraft 2 .10-7 N aufeinander ausüben Candela Lichtstärke, die monochrom. Strahlung mit der Frequenz 540 · 1012 Hz mit einer Leistung von 1/683 Watt pro Steradiant aussendet. 9 Grundgrößen Si-Einheit Größe Temperatur Stoffmenge Zeiche n K mol Name Definition Kelvin Zwischen dem Nullpunkt der thermodynamischen Temperaturskala (absoluter Nullpunkt) und dem Tripelpunkt des Wassers liegen 273,15 K Mol 1 mol eines Stoffes enthält so viele Teilchen, wie Atome in 0,012 kg des Kohlenstoff C-12 enthalten sind. NA = 6,022x1023 Die 11. Generalkonferenz für Maß und Gewicht hat zwei ergänzende SI-Einheiten festgelegt: Bogenmaß: φ [ rad ] 1 rad = s/r = 1 Radiant r s∝r φ Gradmaß: 1 Grad = 1° = ( 2π / 360 ) rad 1 Minute = 1' = 1° / 60 1 Sekunde = 1'' = 1'/ 60 r Kreisumfang = 2π r ⇒ Vollkreis hat 2π rad bzw. 360° Kugelfläche Ω A / r2 Raumwinkel: Ω [ Sterad ] = 1 sr = 1 Steradiant Kugelfläche = 4π r2 ⇒ Vollkugel hat 4π sr A ∝ r2 r 10 Abgeleitete Größen ⇓ mathematische Kombination von Grundgrößen Dimension: Maßeinheit der abgeleiteten Größe Beispiel: Geschwindigkeit v = d(Länge)/d(Zeit) = dx/dt Dimension: [v] = [Distanz] = m = ms −1 [Zeit] s ⇒ Konsistenztests von Gleichungen: 9 Haben alle Summanden die gleiche Dimension ? 9 Haben beide Seiten der Gleichung die gleiche Dimension ? Weitere Beispiele: Aus Einheiten können Vielfache der Einheiten durch Multiplikation mit Faktoren gewonnen werden. 0.01 m = 10 cm = 10 mm = 10000 µm 0.000000001 m = 1 nm, oder 1 pm = 1.10-12m 11 Messgenauigkeit und Messfehler (Genaueres wird vor dem Praktikum angeboten) Eine Messung beruht auf einem quantitativen Vergleich der Messgröße mit einem Standard (Normal). Dadurch erhält man einen Informationsgewinn über den Istwert eines Messobjekts. Jede Messung ist mit einem Fehler behaftet. Messung = Messwert x ± Fehler σ statistisch systematisch Auflösung der Apparatur Falscher Nullpunkt Statistische Fluktuation Fehlkalibration der Skala Rauschen ... Unsicherheiten in Korrektur von Störeffekten ... Durch Wiederholung der Messung beliebig reduzierbar Durch Wiederholung der Messung nicht reduzierbar GRUNDZÜGE DER MECHANIK Grundbegriffe: Skalar, Vektor, Bezugssystem Bewegungen: Geschwindigkeit Beschleunigung Kraft und Masse: Trägheitsprinzip Kräfte Gravitationskraft 12 Skalare Größen (Skalare) • Sie sind durch Zahlenwert und Einheit vollständig definiert. Skalare sind z. B. Zeit (t = 0.8 s), Masse (m = 55 kg), Temperatur (T = 303 K). • Zahlenwerte sind reelle Zahlen, Temperaturangaben in Kelvin sind Immer positiv Vektorielle Größen (Vektoren – physikalische Größen mit Richtungssinn) • Sie sind durch Zahlenwert, Einheit und Richtung vollständig definiert. Vektoren sind z.B. Geschwindigkeit, Beschleunigung, Kraft • Variablen, die für Vektoren stehen, werden häufig mit einem Pfeil gekennzeichnet r r r r = x2 + y2 + z 2 ist der Betrag (Länge) eines Vektors Bezugssysteme Galilei formulierte die umstrittenen Frage, ob sich eine Kugel an Bord eines fahrenden Schiffes in Bewegung oder in Ruhe befinde. Seine Analyse lautete, dass die Beantwortung der Frage von der Position des jeweiligen Beobachters abhängt: ein Beobachter, der sich ebenfalls an Bord des Schiffes befindet, sieht die Kugel in Ruhe, während ein Beobachter am Ufer die Kugel sich zusammen mit dem Schiff bewegen sieht. Die Eigenschaft, in Bewegung zu sein, ist demnach keine, die der Kugel alleine zukommt, sondern hängt von der Wahl des Bezugssystems ab. 3 D Kartesisches Koordinatensystem Für die Betrachtungen im Rahmen dieser Vorlesung werden wir meistens Erde als Bezugsystem benutzten und annehmen, dass die Erde ruht. Dies ist zwar nicht richtig, für die meisten Überlegungen hier ist es jedoch eine akzeptable Annahme. 13 Geschwindigkeit A.Gleichförmige geradlinige Bewegung Diese Bewegung ist gegeben wenn in gleichen Zeiten gleiche Wege zurückgelegt werden. r r r r r (t 2 ) − r (t1 ) ∆s v= = ∆t t 2 − t1 Z r r (2s) X t=2s r ∆s2 r r (1s ) r r (0 s ) r ∆s1 t=1s t=0s Y [vr ] = ⎡⎢ m ⎤⎥ = [m ⋅ s −1 ] ⎣s⎦ Graphische Darstellung der Bewegung im Weg – Zeit – Diagramm Weg-Zeit-Diagramm r r ∆s v= ∆t Umrechnung zwischen den gebräuchlichen Geschwindigkeitseinheiten m/s und km/h : 1 km/h = 1000m : 3600s = (1 : 3,6) m/s = 0,277 m/s 14 Graphische Darstellung der Bewegung im Weg – Zeit – Diagramm s [m] Fall 2: Gleichförmige Bewegung Fall 1 und 3: Ungleichförmige Bewegung 3 Mittlere Geschwindigkeit: r r ∆s BC vM = = ∆t AB 2 Wir erkennen, dass wir die Geschw. bei ungleichförmiger Bewegung um so genauer angeben können je kleiner Zeiten und Wege gewählt werden. Mit C P 1 ∆s ∆s → 0 und α Erhalten wir im Punkt P Momentangeschwindigkeit: B A ∆t → 0 ∆t t [s] r r ds v= dt Vergleich der mittleren Geschwindigkeiten (Näherung) Objekt Geschwindigkeit Schnecke Maulwurf Maulwurf Fußgänger Biene Brieftaube Schwalben Erde (Umlaufbahn) Licht (Vakuum) 0,0008 m/s ≈ 0,003 km/h (Graben) 0,002 m/s ≈ 0,008 km/h (Laufen)1,1 m/s ≈ 4 km/h 1,5 m/s = 5,4 km/h 6,5 m/s ≈ 23 km/h 20 m/s = 72 km/h 60 m/s ≈ 220 km/h 29.800 m/s ≈ 107.000 km/h 299.792.458 m/s ≈ 1.080.000.000 km/h 15 Beschleunigung Ändert sich die Geschwindigkeit, so wirkt eine Beschleunigung (bzw. Abbremsung). Wenn z.B. ein Skispringer startet ist seine Anfangsgeschw. v1=0 m/s. Am Schanzentisch ist seine Geschwindigkeit v2=28 m/s. Wie groß war seine Beschleunigung ? r r r r v (t 2 ) − v (t1 ) ∆v a= = t 2 − t1 ∆t [a] = ⎡⎢ m ⋅ s ⎣ s −1 ⎤ ⎡m⎤ ⎥=⎢ 2⎥ ⎦ ⎣s ⎦ v Momentanbeschleunigung r r r ∆v dv a = lim ∆t →0 = dt dt a<0 a>0 Geschw.-Zeit:Diagramm t1 t2 t3 t Freier Fall Bewegung mit konstanter Beschleunigung. Hier wird ein frei fallender Körper immer schneller. Warum ? g= r r r r v = a ⋅ t; a = g v= ds dt a= dv d 2 s = dt dt 2 t dv = adt ⇒ v = ∫ adt = at + v0 0 t t 1 s = ∫ vdt = ∫ (at + v0 )dt = at 2 + v0t + s0 2 0 0 g Fundamentalgleichungen der Kinematik Freier Fall: v = gt s= g 2 t 2 16 Zusammensetzung von Bewegungen Führt ein Körper mehrere Bewegungen aus, so ergibt sich die Gesamtbewegung durch die Addition der Einzelbewegungen und der Gesamtweg durch die vektorielle Addition der einzelnen Wege, die Gesamtgeschwindigkeit durch die Addition der einzelnen Geschwindigkeiten. vB C= A+ B A B vF keit hwindig e Gesc d n re ie Result vF vB http://www.univie.ac.at/future.media/moe/index.html http://www.mathe-online.at/materialien/Andreas.Pester/files/Vectors/index.htm Horizontaler Wurf horizontal: x = v0t ⇒ t = x v0 vertikal: 2 g 2 g x = y= t 2 v02 2 y=1.5m, v0=3m/s: x=1.6m g = 9.81 m m ≈ 10 2 s2 s 17 KRAFT und MASSE Konzept einer Kraft: Kraft ist eine Fähigkeit, etwas zu bewirken. Als physikalischer Begriff bezeichnet Kraft die Fähigkeit die Bewegung eines Körpers zu ändern (Richtungsänderung, Beschleunigung, Abbremsung) oder auch einen Körper zu verformen. Es gibt viele Arten von Kräften z.B: elastische Kraft, Reibungskraft, Federkraft, elektrische Kraft, Schwerkraft (Gravitation), ..... Auf G. Galilei Erkenntnissen basieren formulierte I. Newton 1668 in „Principia Mathematica“ das Trägheitsprinzip (1. Axiom): Ein Körper verharrt in seinem Zustand der Ruhe oder der gleichförmigen, geradlinigen Bewegung, solange die Summe aller auf ihn einwirkenden Kräfte Null ist. Eine Änderung dieses Zustandes ist nur durch eine Kraft möglich. Einige Beispiele und Überlegungen: Eishockeypuck erreicht Geschwindigkeiten von über 45 m/s. Reibungsfreie Eisfläche würde eine nie endende Fortbewegung mit sich bringen. Ein Körper der keiner Wechselwirkung wie Reibung (oder Gravitation) unterliegt, ist etwa im Weltraum vorstellbar - einmal in Bewegung, setzt ein Körper diese geradlinig, mit konstanter Geschwindigkeit fort. Eine Kraft könnte in solchen Fall die Objektgeschwindigkeit beeinflussen, z.B. beschleunigen. Es zeigt sich aber, dass auch wenn externe Einflüsse (z.B. Reibung) fehlten, eine Initiierung der Bewegung eines Körpers von einer internen Eigenschaft des Körpers, von seiner Trägheit, abhängt. Bei großer Trägheit ist diese Initiierung der Bewegung schwieriger, so aber auch die Abbremsung. Offensichtilich: Die Trägheit eines Körpers proportional zur Masse. 18 Kraft F Kraft ist also die Ursache einer Beschleunigung, sie ist auch proportional zu der Beschleunigung. Auf Galilei Experimenten aufbauend formulierte I. Newton sein 2. Axiom – das Aktionsprinzip: Die Änderung der Bewegung einer Masse ist der Einwirkung der bewegenden Kraft proportional und geschieht nach der Richtung derjenigen geraden Linie, nach welcher jene Kraft wirkt. r r r r r r F ∝ a; F = m ⋅ a; FG = m ⋅ g r m F = 1kg ⋅ 2 = 1N ( Newton) s [] Es gibt eine große Zahl von div. Kräften, sie lassen sich aber in 2 Gruppen einteilen: Kontaktkräfte mit Reichweite von etwa 10-10m (Reibungs-, Stoßkräfte,..) und Fernwirkung (Gravitations-, elektrische und magn. Kräfte) Die Beobachtung, dass Kräfte immer bei Wechselwirkungen auftreten, bedeutet auch dass zu jeder Kraft eine Gegenkraft existieren muss. Die hat Sir Isaac Newton folgendermaßen formuliert: Das Reaktionsprinzip Kräfte treten immer paarweise auf. Übt ein Körper A auf einen anderen Körper B eine Kraft aus (actio), so wirkt eine gleichgroße, aber entgegengerichtete Kraft von Körper B auf Körper A (reactio). r r FA→ B = − FB → A 19 Schwerkraft • Bekannteste Kraft auf unserem Planeten • Frei fallender Körper führt eine gleichmäßig beschleunigte Bewegung aus mit der konstanten Beschleunigung g=9.81 m/s2. r r • Die Beschleunigung ist durch die Schwerkraft F G = m ⋅ g hervorgerufen. • Die Schwerkraft steht normal auf die Erdoberfläche • Eine Masse von 1 kg wird von der Erde mit der Kraft von 9.81 N angezogen. 50 m • Diese Kraft wird auch Gewicht genannt. Beobachtung von G. Galilei: Eisen- und Holzkugel mit dem gleichen Durchmesser geworfen von Turm in Pisa erreichen den Boden gleichzeitig. Warum ? Newton‘sche Erklärung: Schwerere Gegenstände haben auch größere Trägheit. Die Eisenkugel wird von der Erde mit etwa 10-facher Kraft im Vergleich zu der Holzkugel angezogen, aber ihre Trägheit ist auch 10 mal so groß. Also Trägheit und Gewicht sind beide proportional zu Masse. Wodurch unterscheiden sich dann diese beiden Eigenschaften der Masse ? Die Trägheit ist eine inhärente Eigenschaft der Masse, das Gewicht ist von der Gravitationskraft (Schwerkraft) abhängig. Ein Mensch mit 100 kg (Erde) würde auf dem Mond nur etwa 17 kg wiegen. 100 kg ?? 17 kg !! 20 GRAVITATIONSGESETZ Das Newtonsche Gravitationsgesetz besagt, dass sich die Gravitationskraft F, mit der sich zwei Massen m und M anziehen, proportional zu den Massen beider Körper und umgekehrt proportional zum Quadrat des Abstandes r der Massenschwerpunkte verhält: F =G⋅ m⋅M r2 r ↑⇒ F ↓ Die Gravitationskonstante, meist durch das Formelzeichen G dargestellt, ist eine von Isaac Newton eingeführte Universalkonstante, die bei bekanntem Abstand zweier, massiver Objekte deren gegenseitige Massenanziehungskraft bestimmt. G ≈ 6.67 ⋅10 −11 m3 kg ⋅ s 2 Danach ist die Gravitationskraft eine Wechselwirkung - nach dem dritten Newtonschen Axiom wirkt die Kraft sowohl auf die erste als auch auf die zweite Masse, aber jeweils in der entgegengesetzter Richtung. Die Gravitationskonstante G führt über das Gravitationsgesetz zur Masse M und zur mittleren Dichte ρ des jeweiligen Körpers (z. B. der Erde ρ E ), sofern der mittlere Radius und die Oberflächenbeschleunigung g bekannt sind: G Mm M = mg ; ρ = 2 V RE ρ= RE 3g 4π ⋅ G ⋅ RE ρ E ≈ 5.5 ⋅103 kg m3 21 Kräftezerlegung auf der schiefen Ebene Eine schiefe Ebene ist eine ebene Fläche, die gegen die Horizontale geneigt ist. Sie wird z.B. verwendet, um den Kraftaufwand zur Höhenveränderung einer Masse zu verringern. Die Gewichtskraft FG einer Masse, die sich auf einer Schiefen Ebene befindet, wird in zwei Komponenten zerlegt, die FT parallel zur Oberfläche der schiefen Ebene und die FN normal zur Oberfläche. Da die Normalkraft bereits von der schiefen Ebene selbst getragen wird, muss, um die Masse im Gleichgewicht zu halten, lediglich die treibende Kraft FH ausgeglichen werden. α FH FH = FG ⋅ sin α FN FG FN = FG ⋅ cos α ARBEIT, ENERGIE UND LEISTUNG Begriff „Arbeit“ ist im allgemeinen für körperliche oder Geistige Aktivität benutzt. Wir sehen uns zunächst den einfachsten Fall der mechanischen Arbeit. Mechanische Arbeit W wird verrichtet wenn ein Körper entgegengesetzt zu einer wirkenden Kraft bewegt wird. m FG = m ⋅ g FG = F m FG = m ⋅ g Also in diesem Fall gilt: ARBEIT = KRAFT * WEG r r r r W = F ⋅ h = F ⋅ h ⋅ cos α r r α ...Winkel zw.( F und h ) [W ] = [kg ⋅ m ⋅ s −2 ⋅ m] = [1N ⋅ m] = [1J ] [1J ] ⇒ 1 Joule h Welche Fähigkeit hat nun ein auf die Höhe h gehobener Körper ? 22 Der Körper hat nun das Potenzial Arbeit zu verrichten, er besitzt eine potenzielle Energie: W = FG ⋅ h = m ⋅ g ⋅ h Da in Ruhe keine Arbeit geleistet werden kann, kann der Körper beim Runterfallen von der Höhe h die aufgewendete Arbeit abgeben. Jetzt wird aber die potenzielle Energie in Bewegungsenergie, kinetische Energie, umgewandelt: W = FG ⋅ h = m ⋅ g ⋅ h W= 1 m ⋅ g ⋅ ( g ⋅ t )2 2 und g ⋅t2 h=s= 2 weil v = g ⋅ t Die kinetische Energie wird beim Auftreffen wieder Umgewandelt in andere Energieformen, z.B. Wärme, Deformation. Die Einheit [J] bleibt gleich. W= Die Arbeit kann in einem Kraft – Weg Diagramm dargestellt werden. Sie ergibt die Fläche eines Rechtecks mit den Seiten: mg und h. Zur Überwindung der Höhe h kann auch eine schiefe Ebene verwendet werden. Die Hubarbeit ist nun entlang eines längeren Weges s=h / cosϕ zu leisten. ϕ F = S F •co s F h FG h h 0 0 W = ∫ F ⋅ ds = F ∫ ds = F ⋅ h F [N] W=F•h Weg [m] Beispiel: Heben einer Masse von 10 kg um 3 m erfordert eine Arbeit von 10 kg⋅10 m/s2 ⋅3 m = 300 J. s ϕ 1 m ⋅ v2 2 α r r W = F ⋅ cos ϕ ⋅ s = F ⋅ s Verschieben einer Masse von 10 kg um 3 m auf der schiefen Ebene mit einer Neigung von 30° erfordert eine Arbeit von mg⋅s⋅cos60° = 150 J. Höhengewinn = 3m⋅ cos60° = 1.5 m Arbeit = Skalarprodukt des Kraftvektors r mit dem Vektor der Verschiebung s r F 23 Beispiel: Arbeit zur Beschleunigung eines Wales von 100 t von Ruhe auf 8 m / s: W= mv 2 100000 kg ⋅ 82 m 2 s −2 = = 3200000 J = 3200 kJ 2 2 Täglich vom Menschen aufgenommene Energie (Nahrung) ~ 10000 kJ. Bei einem Wirkungsgrad von 32% (d.h. 32% der Nahrungsenergie stehen für diese Arbeit zur Verfügung) könnte der Wal einmal pro Tag auf 8 m / s beschleunigt werden. Bei Körperlicher Tätigkeit merkt man, dass bei gleicher Arbeit die Ermüdung umso schneller eintritt, je kürzer die Zeit in der die Arbeit verrichtet wurde. Man hat unterschiedliche Leistungen vollbracht. Dies hilft uns die Leistung zu definieren: P= W ⎡ J⎤ ; [P ] = ⎢1 ⎥ t ⎣ s⎦ Leistung = verrichtete Arbeit Zeit Aus dieser Definition kann der bekannte Begriff der Kilowattstunde (kWh) ermittelt werden. Leistung mal Zeit = Energie. 1 kWh = 1000 W ⋅ 3600 s = 3,6 ⋅10 6 J = 3,6 MJ ERHALTUNGSSÄTZE Unter einer Erhaltungsgröße versteht man eine Größe, die für die an einer Wechselwirkung beteiligten Teilchen vor und nach der Reaktion gleich ist (also erhalten bleibt). Eine der bekanntesten Erhaltungsgrößen der Physik ist die Energie. Zu jeder Erhaltungsgröße gehört ein Erhaltungssatz, in dem formuliert wird, welche Größe unter welchen Bedingungen erhalten bleibt. Beispiel: Fadenpendel – periodische Umwandlung von potenzieller in kinetische Energie und umgekehrt, bei gleichzeitiger Erhaltung der Gesamtenergie 1 : Wges = W pot = mgh 1 3 2 : Wges = Wkin Wges = W pot h v 2 Wges = Wkin 3 : Wges = W pot mv 2 = 2 = mgh WAnfangszust . = WEndzust . 24 Für viele physikalische Größen gelten Erhaltungssätze. Ein Erhaltungssatz für eine Größe X bezieht sich stets auf ein System, welches für diese Größe nach außen bgeschlossen ist. Für eine andere Größe kann das System offen sein. Einige Beispiele: IMPULS In der Umgangssprache bedeutet der Impuls einen Antrieb etwas zu tun, in Angriff zu nehmen oder zu unternehmen. IMPULS (Physik) Bewegt sich ein Körper der Masse m mit einer Geschwindigkeit v, so kann dies durch eine Größe, den Impuls, beschrieben werden. Jeder bewegte Körper trägt einen Impuls, den er bei Stößen oder durch Kraftwirkungen ganz oder teilweise auf andere Körper übertragen kann. Der Impuls ist definiert als Produkt der Masse m eines Körpers und dessen Geschwindigkeit. Impuls und Geschwindigkeit sind Vektoren: r r r ds p = m⋅v = m⋅ dt v1 = a1t = F1 t m1 r F = m⋅a v2 = a 2 t = r r v = a ⋅t F2 t m2 25 IMPULSÜBERTRAGUNG r r p = m⋅v [ pr ] = 1 kg ⋅ m ⋅ s −1 r m ⋅ v1 = F1 ⋅ t und r m ⋅ v2 = F2 ⋅ t r r es gilt : F1 = − F2 r r p1 = − p2 oder r r p1 + p2 = 0 Impuls, Kraft und Geschwindigkeit sind Vektoren und weisen in die gleiche Richtung. Impulserhaltungssatz: Für jedes abgeschlossene System bleibt der Gesamtimpuls konstant 26 Wenn sich ein Körper (Massenpunkt) mit der Masse m translatorisch mit der Geschwindigkeit v bewegt, so beschreibt man den Impuls als: r r p = m⋅ v Dim [p] = 1N · s oder 1kg · m · s-1 Durch eine Umformulierung des II. Newton´schen Axioms erhalten r r r wir: r r dv d ( m ⋅ v ) dp F = m⋅a = m⋅ = = dt dt dt Die Kraft F, die auf die Masse r m wirkt,r ist gleich der Impulsänderung pro Zeiteinheit. Die Größe: F ⋅ dt = dp nennt man Kraftstoß. Kraftstoß kennzeichnet die Einwirkung einer Kraft auf einen Körper in einer bestimmten Zeit. Der Kraftstoß wird grafisch durch den Flächeninhalt einer Kraft-Zeit-Kurve dargestellt. Energieumsatz im menschlichen Körper Um den Energieumsatz für ein ganzes Lebewesen zu analysieren, also die Energie, die z. B. ein Mensch oder ein Tier benötigt, müssen einzelnen Individuen einer Population bezüglich ihres Energiebedarfs je nach Alter, Geschlecht, Gesundheitszustand, körperlicher Leistung oder umgebendem Klima bewertet werden. Biologische Organismen sind keine geschlossenen Systeme. Es findet ständiger Stoff und Energieaustausch mit der Umgebung statt. Es stellt sich dabei ein sog. Fließgleichgewicht ein. Dieses Gleichgewicht ist nur bei ausreichender Energiezufuhr von Außen, je nach abgegebener Arbeit, oder Leistung möglich. Im Mittel nimmt der Mensch 9630 kJ /Tag = 2300 kcal /Tag auf. Das entspricht einer Leistung von 110 W. Die Energie wird als potenzielle Energie auf der molekularen Ebene zur Verfügung gestellt. Bei der Umsetzung der Energie können bis etwa 30% als mechanische Arbeit freigesetzt werden. Nahrung Energie kJ / g Kohlehydrate 19 Fett 42 Alkohol 34 27 DREHBEWEGUNG r F r F r −F r −F Keine Drehung Drehung gegen Uhrzeigersinn r r Das Drehmoment Drehung wird stärker mit zunehmender Kraft F. r F Wir definieren: Drehung wird stärker wenn der Hebelarm r vergrößert wird. Drehmoment M = Hebelarm r • Kraft F r r r F2 α r F1 α r F Die wirkende Kraft F kann in 2 Komponenten zerlegt werden. Nur die F1 Komponente erzeugt ein Drehmoment M !! M = r ⋅ F1 = r ⋅ F ⋅ sin α Hebelarm r und Kraft F sind offenbar Vektoren. Auch das Drehmoment M ist ein Vektor. M hängt nicht nur vom Betrag , sondern auch von der Richtung der Kraft F ab. So müssen r und F als Vektorprodukt ausgedrückt werden !!! r r r M = r×F [M ] = 1Nm ( nicht Joule!) r M VEKTORPRODUKT: * Das Ergebnis ist ein Vektor, mit Richtung senkrecht zu den beiden Ausgangsvektoren • Der Betrag des Ergebnis-Vektors entspricht der von den Ausgangsvektoren aufgespannten Fläche • Betrag: „Produkt der Beträge beider Vektoren und des Sinus des Winkels zwischen den Vektoren“ r F α r r 28 M = r ⋅ F = r ⋅ F ⋅ sin α Beispiel: 1 Mit welcher Kraft muss der Muskel ziehen um eine Masse von 2 kg halten zu können ? L1=3 cm und L2=30 cm. Ann.1.: Muskelkraft normal auf d. Unterarm. Ann.2.:Muskelkraft unter α=60° auf d. Unterarm Die Masse m erzeugt ein Drehmoment: M = 20 N ⋅ 0.3m = 6 Nm F = mg = 2kg ⋅10ms −2 = 20 N F1 = 6 Nm = 200 N 0.03m 1 M = 20 N ⋅ 0.3m = 6 Nm F1 = 6 Nm = 231N 0.03m ⋅ sin 60° 2 Hebelgesetz Hebelgesetz r1 ⋅ F1 = r2 ⋅ F2 Obiges gilt nur, wenn die Kräfte im Winkel von 90° angreifen. Ist der Winkel verschieden von 90°, so müssen die Kräfte in die einzelnen Komponenten zerlegt werden, und nur die Komponente, die rechtwinklig vom jeweiligen Arm wegzeigt, geht in die Rechnung ein. Ein Hebel ist einer der wichtigsten Kraftwandler. Er dient, wie alle mechanischen Maschinen dazu, Arbeit zu erleichtern, nicht zu sparen. Denn die zu leistende Arbeit bleibt nach der Formel: Arbeit = Kraft . Weg Das heißt, eingesparte Kraft geht auf Kosten des Weges, die zu leistende Arbeit wird keineswegs weniger. r1 ⋅ F1 = r2 ⋅ F2 29 ω Drehung um eine Achse – Winkelgeschwindigkeit Unter der Winkelgeschwindigkeit versteht man die zeitliche Änderung des Drehwinkels bei einer Rotation: ω= ∆ϕ für ∆t → 0 ∆t ω= dϕ dt r vT Die Winkelgeschwindigkeit gibt an, wie schnell etwas rotiert. Winkelgeschwindigkeit ist unabhängig von der Entfernung von der Drehachse. ϕ Die Einheit der Winkelgeschwindigkeit ist rad/s bzw. 1/s. b=∆s=r. ∆ϕ ϕ vT = b ∆s ∆ϕ = r⋅ = r ⋅ω ∆t ∆t vT Kreisbewegung Bei konstanter Winkelgeschwindigkeit gilt für Zeitintervalle ∆t: ∆ϕ = ω ⋅ ∆ t T sei die Zeitdauer für einen vollen Umlauf des Massenpunktes P auf einer Kreisbahn, d.h. Vektor r durchläuft einen Winkel 360o (bzw. 2π im Bogenmaß), dann gilt: Damit ergibt sich für die Winkelgeschwindigeit: Winkelgeschwindigkeit ω auch als Kreisfrequenz bezeichnet: ∆ϕ ∆t = 2π T ω= 2π −1 s T [ ] ω = 2π ⋅ν Ändert sich ω in der Zeiteinheit ∆t (ungleichförmige Rotationsbewegung)Ö Winkelbeschleunigung α = ∆ω /∆t [rad.s-2] 30 Beispiel: Wie groß ist die Winkelgeschwindigkeit bei gleichförmiger Rotation von 3000 Upm ? 3000 ⋅ 2π ω= = 100π s −1 60 s Eine Schiebe mit dem Durchmesser von 23 cm rotiert mit 7000 Upm. Wie groß ist die Tangentialgeschwindigkeit am Rande ? 7000 ⋅ 2π = 733 s −1 60 s v = r ⋅ω ω= v =? v = 0.115 m ⋅ 733 s −1 = 84,3 ms −1 Beispiel: Gleichförmige Rotationsbewegung Winkelgeschwindigkeit der Erde um ihre Achse. Periode T = 24 h Wie groß ist die Winkelgeschwindigkeit der Erde ? Wie groß ist die Bahngeschwindigkeit am Äquator ? Wie groß ist die Bahngeschwindigkeit am Nordpol ? Wie groß ist die Bahngeschwindigkeit in Wien ? 31 Beschleunigung bei Drehbewegungen Bewegung auf einer Kreisbahn, auch mit einer konstanten Winkelgeschwindigkeit ist eine beschleunigte Bewegung. Der Betrag der Bahngeschwindigkeit ist zwar konstant, aber ihre Richtung ändert sich. Jede Richtungsänderung des Geschwindigkeitsvektors ist mit einer Beschleunigung verbunden. P ∆ϕ Richtung der Bahngeschwindigkeit v ist in jedem Punkt P tangential zum Kreis. v = lim ∆t →0 ∆s r ⋅ ∆ϕ ∆ϕ = lim = r ⋅ lim ∆t → 0 ∆t ∆t ∆t →0 ∆t vx v0 v1 v1 ∆ϕ ⇒ v = r ⋅ω ∆v v0 Verantwortlich für die Änderung der Geschwindigkeitsrichtung ist die Beschleunigung aZ = const. Sie wirkt senkrecht zur Bahngeschwindigkeit Ö Zentripetalbeschleunigung, deren Betrag lautet: 2 aZ = v ⋅ ω = v = r ⋅ω 2 r Beispiel: Zentrifuge Fz r FZ = m ⋅ aZ = m ⋅ r ⋅ ω 2 ω = 2πf Für die Beschreibung als Auftrieb wird Schwerkraft durch Zentrifugalkraft ersetzt. g rω2 } Beschleunigung Beispiel: 100 Umdrehungen pro s mit 0,1 m Radius 9,81 m/s 2 (2π⋅100)2 ⋅ 0,1 m/s2 = 40.000m/s2 ρ ρ Dichteschichtung oder Sedimentation 32 TRÄGHEITSMOMENT Zwei Zylinder haben die gleiche Masse, trotzdem beschleunigt der Hohlzylinder langsamer als der Vollzylinder. Warum ? Bei einem rotierenden Körper hat jeder Teil eine bestimmte Momentangeschwindigkeit. Jede bewegte Masse hat eine kin. Energie, daher besitzt ein rotierender Körper die Rotationsenergie. Um diese Energie bestimmen zu können, denken wir den Körper in Massenelemente dmi zerlegt. Im Abstand ri von der Rotationsachse hat jedes dmi eine Geschwindigkeit: v =r ⋅ Rotationachse d d i ω i Seine kinetische Energie beträgt: ∆mi ⋅ vi ∆mi ⋅ ri ⋅ ω 2 ∆Ek = = 2 2 2 2 Die gesamte Energie der Rotation ergibt sich durch die Summation (Integration) 2 ∆mi ⋅ ri ⋅ ω 2 ω 2 ω2 ⋅ I 2 aller Beiträge: E = = ⋅ m ⋅r = r ∑ i 2 2 ∑ i i i 2 Trägheitsmoment Beispiele für div. Trägheitsmomente: I HZ = mR 2 IVZ = 1 mR 2 2 I HK = 2 mR 2 3 IVK = 2 mR 2 5 33 Drehimpuls r ω groß r ωklein Definition des Drehimpulses: r r L = I ⋅ω Der Drehimpuls ist in einem abgeschlossenem System konstant (Drehimpulserhaltung) I klein I groß Analogie zwischen Translationsbewegung und Rotation Translation Rotation r s Weg r r Geschwindigkeit v = s& r r Beschleunigung a = v& Masse Winkel Winkelgeschw. Winkelbeschl. Kraft m r r p = mv r r r F = ma = p& Kin. Energie EKIN = Impuls mv2 2 ϕ r ω ω& Trägheitsmoment I Drehimpuls Dremoment Kin. Energie r r L = Iω r r r M = r ×F Iω2 EKIN,R = 2 34 Reibungskräfte Bis jetzt haben wir stets Reibungskräfte vernachlässigt. Bei der Betrachtung der Kräfte spielt aber die Reibung eine wichtige Rolle. Verschiebt man Körper gegeneinander, so werden, unabhängig vom vorliegenden Aggregatzustand, Reibungskräfte wirksam. Äußere und innere Reibung äußere: Reibung zwischen den Außenflächen fester Körper innere: Fluidreibung, d.h. Reibung zwischen Fluidteilchen (Zähigkeit / Viskosität) Zwischen den Berührungsflächen zweier Körper treten Reibungskräfte auf. Sie sind der Bewegungsrichtung stets entgegengesetzt. v FR F FN -FN Mikrostruktur der Oberflächen Haftreibung r F reale, rauhe Oberfläche r r FN = FG FR = µ r ⋅ FN Experimenteller Test von FR = µR·FN F > FR r FN F > FR r FN F > 2FN r 2FN 35 Messung von µR (z.B. Rutschen vonm Baumstamm auf einem schrägen Hang) αR = Winkel beim Losrutschen m r FR r FN r FG FR FN αR αR Gleitreibung tan α = r mg r v FG = µ ⋅ FN reale, rauhe Oberfläche r r FG < FR r r FN = FG Vergleich der Reibungskräfte Haftreibungskraft (FR) FR = µr • FN FN = FG v=0 F FR Haftreibungszahl FN = FG Gleitreibungskraft (FR) FG = µ • FN v F FG Gleitreibungszahl 36 Reibungskoeffizienten einiger Stoffpaare Material Haftreibungszahl Gleitreibungszahl trocken geschmiert trocken geschmiert Gummi- Beton 0.65 0.3 0.25 0.1 Stahl- Stahl 0.18 0.10 0.05 0.009 Stahl- Holz 0.5 0.1 0.3 0.02 0.3 0.003* Knochen- Knochen *geschmiert durch die Synovialflüssigkeit Elastizität und Festigkeit • • • • Elastische und nichtelastische Deformation Festigkeit von Stoffen Tragfähigkeit von Strukturen Dynamische Effekte Bis jetzt haben wir vorausgesetzt, dass ein Festkörper bei Einwirkung der Kräfte unveränderbar ist. Es zeigt sich, dass alle Materialien bei der Einwirkung von Kräften Deformationen erleiden, die auch zu einer dauerhaften Veränderung, oder Bruch führen können. L F A 37 Elastische und nicht elastische Deformation Jede Krafteinwirkung führt zu einer Deformation des Körpers. Die Verformungen eines Körpers lassen sich in 3 Gruppen einteilen: Dehnung Kompression Scherung Aus den 3 Grundverformungen lassen sich weitere, wie etwa Torsion oder Biegung zusammensetzten Torsion Hooke‘sches Gesetz Biegung l + ∆l Das Hooke‘sche Gesetz beschreibt das elastische Verhalten von Festkörpern, deren elastische Verformung linear proportional zur anliegenden Spannung σ ist. F D Wir definieren: l F ⎡N⎤ Spannung σ= A ⎢⎣ m 2 ⎥⎦ ∆l 1 = ⋅ σ [1] Relative Dehnung l E σ ⋅l Nm 2 ElastizitätsE= modul ∆l [ ] Das H.G. gilt nur für lineare elastische Deformationen. Diese Bedingung ist für kleine Deformationen erfüllt. Bei Deformationen oberhalb der Proportionalitätsgrenze werden die Verformungen nicht-linear, d.h. die Verzerrung ist nicht mehr proportional zur Spannung σ, die Verformung kann aber dennoch reversibel sein. Erst für noch größere Deformationen wird die Verformung irreversibel (plastische Deformation), und es findet keine vollständige Rückformung beim Nachlassen der Spannung statt. 38 Verhalten eines Festkörpers bei Dehnung F Nichtlinearer Bereich (fast elastisch) Nicht-elastischer Bereich (Fließen) Bruch Proportionalitätsbereich (Hookesches Gesetz) ∆l BESTIMMUNG DES ELASTIZITÄTSMODULS AUS DEM SPANNUNGS-DEHNUNGS-DIAGRAMM [N/m2] = [Pa] 39 Festigkeit von Stoffen Stoffe können so beansprucht werden, dass sie unter dem Einfluss der Kräfte zerstört werden. Spannungs-Dehnungs-Diagramme erlauben die Unterscheidung in spröde, zähe und plastische Stoffe. σ [N/m] = [Pa] spröde zäh plastisch Bei Knochen ist eine max. Dehnung von etwa 2.5% bei 200.106 N /m2 möglich. Haare können bis 30% verlängert werden bevor sie reißen, Resilin widersteht einer Dehnung um das Doppelte der ursprünglichen Länge. ∆l/l [-] Die elastischen Eigenschaften bei vielen Stoffen unterscheiden sich in vielen Richtungen. Fichtenholz parallel zur Faser: 90.106 N/m2; quer zur Faser: 3.106 N/m2 Elastizitätsmodul [N /m2 ] von einigen Materialien Stahl 2E11 Aluminium 6E10 Eichenholz 1E11 Knochen (Dehnung) 2E10 Knochen (Stauchung) 1E10 Spinnweben 3E9 Collagen (Dehnung) 2E6 Gummi (Dehnung) 3E6 Resilin (Insekten) 1E6 Bei allseitiger Kompression gibt es analoge Beschreibung für relative Volumsverkleinerung: Die üblicherweise als kaum verformbar gesehenen Medien haben sehr große Werte für E-Modul. Zwar haben Spinnwegen hohes E-Modul, doch sind sie bereits durch kleine Kräfte wegen des geringen Durchmessers dehnbar. Die leicht dehnbaren Stoffe haben kleinere EModuln. ∆V 1 = ⋅p V M p= F A Kompressionsmodul 40 Scherung r F Fläche A α= α 1 ⋅σ G σ= F A Für Knochenmaterial ist das Schubmodul G = 9E10 Nm2.rad-1 0.014 -17 ∆l / l Stauchung Dehnung 12 -0.018 σ /10 7 Spannungs-DehnungsDiagramm eines Knochens Bis heute ist es ein Geheimnis, wie die Natur harte und sehr feste Materialien, wie Knochen, Zähne oder Holz, aus einer Mischung aus Proteinen, weich wie menschliche Haut, und Mineralien, spröde wie Schulkreide, erzeugen kann. Moderne Forschung zeigt, dass die Nanostruktur von Biomaterialien vermutlich der Schlüssel ist. Knochen, die aus Partikeln von nur einigen Nanometern Größe bestehen, sind wesentlich fester sind als Muschelschalen, deren Teilchen einige hundert Nanometer groß sind. Die Nano-Komposit-Materialien sind unempfindlich gegenüber Materialfehlern. Hartes biologisches Gewebe: (a) Knochen (b) Wirbelsäuleknochen (c) Perlmut sind NanoKomposite aus harten Mineralkristallen eingebettet in weiche Proteinmatrix (d, e, f). H. Gao et al. PNAS Vol.100, pp. 5597-5600 (2003) 41 Tragfähigkeit von Strukturen Bei Belastung einer Struktur wird diese so lange elastisch verformt, bis durch die Verformung im Inneren des Körpers aufgrund der Elastizität entgegengesetzte Kräfte entstehen. Neutrale Faser r F gedehnt Zugkraft gestaucht r -F Bäume, die sich im Wind biegen, sind im Prinzip vertikale Ausleger, die Druckbelastungen in praktisch allen Richtungen standhalten müssen. Druckkraft Biologische Materialien haben aus ihre Festigkeit bezogen eine Geringe Masse. Knochen und Aluminium haben ähnliche Zugfestigkeit, Aluminium hat aber etwa die doppelte Dichte. Mechanische Eigenschaften von Geweben der Fichte Mit der Anordnung der sog. Zellulosefibrillen in der Wandschicht können Pflanzen ihre mechanischen Eigenschaften steuern. Junge Bäume verfolgen sie die Strategie, dem Wind durch hohe Flexibilität wenig Angriffsfläche zu bieten. Das von jungen Bäumen gebildete Holz („juveniles Holz“), zeigt einen relativ großen Spiralwinkel. Der Stamm eines alten Baumes hingegen muss dem Wind widerstehen. Demzufolge findet sich in dem so genannten „adulten“ Holz ein kleiner Spiralwinkel (~5-15°). (Reiterer et al 1999) 42 Speicherung von Energie durch elastische Verformung ∆l 1 F E⋅A Durch eine Umformung des = ⋅σ = ⇒F= ⋅ ∆l Hookschen Gesetztes erhalten wir: l E E⋅A l Der Wert des Bruches ( E.A. / l )hängt nur von der Körperform und Material ab, daher können wir schreiben: F = k . s, k ist eine Konstante. Die Kraft ist also proportional der Verlängerung (Stauchung). Dies gilt im elastischen Bereich. Insbesondere würde es für eine Feder gelten, daher nennt man k auch eine Federkonstante. F = k ⋅ s und s=∆l s0 Ee=F0.s0 / 2=ks0 / 2 ds 2 s W = ∫ k ⋅ s ds = k ⋅ 0 = Ee 2 0 F F dW = F ⋅ ds s0 s Speichrung von Energie in elastischer Form: Uhrenfeder, elastische Schwingung, Insekten (Flügelschlag wird mittels Resilin abgebremst und beschleunigt) Beispiel (Ann. Das Hookesche Gesetz gilt) Der Aufzug eines Hochhauses steht im Erdgeschoß. Er hängt an 3 je 20 m langen Stahlseilen mit 10 mm Durchmesser. Messe der leeren Kabine = 150 kg. 4 Personen je 75 kg sind im Aufzug. Es steigen weitere 5 Personen zu. Um wie viel cm verlängert sich das Seil ? Seile sind doppelt geflochten, dh. E-Modul von Vollmaterial muss mit 0.36 multipliziert werden. Querschnittsfläche von 3 Seilen A = 2,4E-4m2 E-Modul von Seil: E = 2E11.(0.36) N / m2. E = 20m ⋅ 3750 N = 0.44cm 11 N −4 2 7,2 ⋅10 ⋅ 2.4 ⋅10 m m2 b σ b bb b bb b ∆l = l ⋅ b Belastung durch Zusteigen von 5 Pers.: 5.(75kg).10m/s2 = 3750 N 43