PWM Teil2 - Lehrstuhl für Elektrische Antriebssysteme und
Werbung

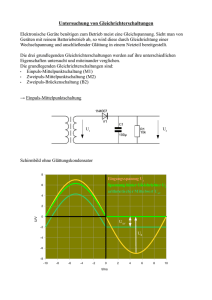
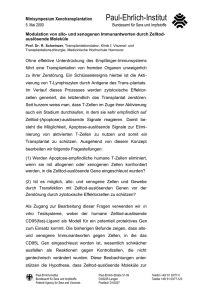
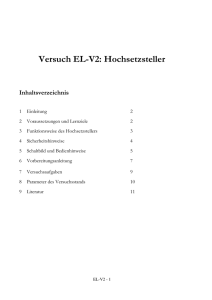
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Prof. Dr.-Ing. Ralph Kennel Arcisstraße 21 Email: [email protected] Tel.: +49 (0)89 289–28358 D–80333 München Internet: http://www.eat.ei.tum.de Fax: +49 (0)89 289–28336 PWM Teil2 1 1 Aufmodulation harmonischer Schwingungen Im vorhergehenden Kapitel(PWM) wurde deutlich, dass es mittels der Sinus-Dreieck-Modulation nicht möglich ist, annähernd an die Ausgangsspannung, welche im Blockbetrieb erreicht wird heranzukommen. Praktisch würde das bedeuten, dass eine Maschine die mittels der SinusDreieck- Modulation geregelt wird ca. das 1,27- fache der Zwischenkreisspannung benötigen würde, wie eine Maschine welche im Blockbetrieb betrieben wird. Ein wesentlicher Vorteil des Unterschwingungsverfahren gegenüber dem Blockbetrieb ist, dass ein nahezu sinusförmiger Strom resultiert. Da das Sechseck, welches im Blockbetrieb durchlaufen wird die größt möglichste Aussteuerung darstellt, sollte zuerst versucht werden, den größten Kreis innerhalb dieses Sechsecks zu modulieren. Solange die Modulation kreisförmig ist, spricht man von linearer Modulation, welche sich dadurch auszeichnet, dass Spannungsbetrag und Winkelgeschwindigkeit unter der Annahme einer unendlichen Schaltfrequenz konstant sind. Der Bereich von einem Modulationsindex von 0,785..0,907 wird üblicherweise als modifiziertes Unterschwingungsverfahren bezeichnet. Erreicht werden höhere Modulationsindizes als 0,785 indem auf das sinusförmige Sollsignal ein weiteres Signal addiert wird, welches an der Last lediglich das Potential verschiebt. Somit gilt für ein n-phasiges System, dass alle n*m-fach harmonischen keinen Einfluss auf das Verhalten der Last haben. Hierbei geht m von 1 bis unendlich. Beispielsweise würde für ein 3-phasiges System die Addition einer 3,6,9,12...-fachen harmonischen keinen Einfluss haben. Mittels dieses Freiheitsgrades können beispielsweise folgende Signal erzeugt werden. Abbildung 1.1: Beispiele von addierten 3-fachen Harmonischen 1.1 Übermodulation Die nicht linearen Modulationsverfahren werden in einem Bereich von 0,907..1 verwendet. Hierbei wird zwischen denjenigen Verfahren unterschieden, die sowohl in der Winkelgeschwindigkeit, als auch im Spannungsbetrag unlinear sind, als auch zwischen, denjenigen, die lediglich im Spannungsbetrag nicht konstant sind. Letztere sind bis zu einem Modulationsindex von 0.952 2 anwendbar. Charakterisisch für die Trajektorien im Übermodulationsbereich ist, dass diese teilweise außerhalb des Sechsecks gezeichnet werden, was dadurch erreicht wird, indem die Rotationsgeschwindigkeit und der Spannungsbetrag varrieren. Bei einer Darstellung außerhalb des Sechsecks ist grundsätzlich immer die Grundwellenschwingung abgebildet, da diese durchaus größer sein kann, als die verursachende Spannungstrajektorie. Dies darf jedoch nicht interpretiert werden, als ob eine Spannung anliegt, welche physikalisch größer ist als der Rand des Sechsecks. Die Form der größten Übermodulation ist der Blockbetrieb, da hier die Spannungsgrundwelle ein Maximum erreicht. Erkauft wird sich diese hohe Spannung durch Oberwellen, welche thermische Verluste und Drehmomentoberwellen hervorrufen. Abbildung 1.2: Halbschwingung im Übermodulationsbereich einer Phase Anhand der Abbildung wird der Übergang von der linearen zur Blockmodulation deutlich. Für die Graphen bis zu einem Modulationsindex von 0,952 wird deutlich, dass keine Sprünge vorhanden sind. Oberhalb von 0,952 sind die Sprünge im Bereich der halben und vollen Aussteuerung sichtbar. Die zeitliche Abfolge für diese Modulation wird anhand der nächsten Zeichnung erläutert. Bei Vergleich des Sollzeigers, welcher mit einer konstanten Geschwindigkeit rotiert, mit dem Istzeiger wird deutlich, dass der Istzeiger den Bereich an den Längsseiten des Sechsecks schneller durchläuft, als die Ecken. In den Ecken verlangsamt die Geschwindigkeit des Istzeigers sich, so dass der Sollspannungszeiger den Istspannungszeiger wieder einholt. Mit dieser Methode wird erreicht, dass die Spannungszeitfläche vergrößert wird, da die maximale Spannung des Umrichters in den Ecken größer ist als an den Längsseiten. 3 110 110 110 uav uav u u av 100 110 u u 100 100 110 u 110 uav u uav uav u 100 100 100 Abbildung 1.3: Raumzeiger Übermodulation zeitlich gestaffelt 1.2 Vertiefungen 1.2.1 Beschreiben Sie die Vor- und Nachteile der Anwendung von Übermodulation. Zeichen Sie qualitativ die Stromverläufe für eine blockförmig basierte Modulation und eine sinusförmig basierte. Gehen Sie hierbei von einer sinusförmigen Gegenspannung und einer hohen Schaltfrequenz aus. 1.2.2 Erläutern Sie die Unterschiede zwischen den verschiedenen Übermodulationsverfahren und sinusförmiger Modulation in Bezug auf Winkelgeschwindigkeit und Betrag des Spannungszeigers. 1.2.3 Um die lineare Aussteuerung zu erhöhen wird eine dritte harmonische auf die Grundwelle addiert. Erläutern Sie die Idee hinter der Aufmodulation von “zero sequence Systems“. Berechnen Sie die Amplitude der dritten harmonischen bei welcher der Modulationsindex maximal wird. 4 Abbildung 1.4: Hilfszeichungen 5 Abbildung 1.5: Hilfszeichungen 6 Abbildung 1.6: Hilfszeichungen 7