Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik 1
Werbung

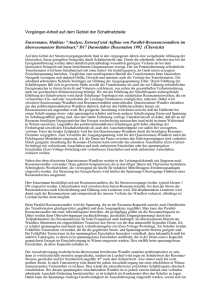
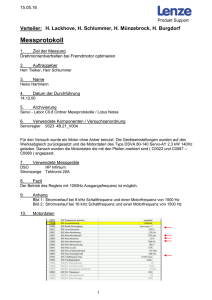
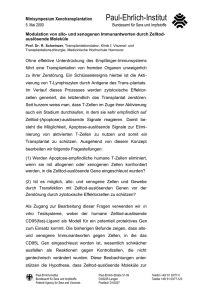
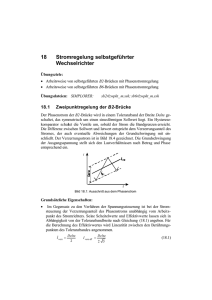
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Technische Universität München Prof. Dr.-Ing. Ralph Kennel Arcisstraße 21 Email: [email protected] Tel.: +49 (0)89 289–28358 D–80333 München Internet: http://www.eat.ei.tum.de Fax: +49 (0)89 289–28336 PWM 1 1 Pulsbreitenmodulation Gegenüber dem Blockbetrieb kann mittels der Pulsbreitenmodulation, der Mittelwert der Ausgangsspannung verändert werden. Dies ist möglich, indem der Leistungshalbleiter während eines Zykluses nicht permanent eingeschaltet bleibt, sondern mit einer vorgegebenen Frequenz einund ausschaltet wird. Das Verhältnis zwischen eingeschalteten und ausgeschalteten IGBT nennt sich Tastverhältnis und ist bestimmend für die mittlere Ausgangsspannung. Die Frequenz, mit der das Pulsmuster moduliert wird ist die Schaltfrequenz, welche auch entscheidenden Einfluss auf die entstehenden Verluste im Umrichter wie auch im Motor hat. Desto höher die Schaltfrequenz gewählt wird, umso größer werden die im Umrichter anfallenden Verluste. Anderseits verursachen Oberschwingungen bei sehr kleinen Schaltfrequenzen Verluste im Motor. Demnach muss die Schaltfrequenz immer der Applikation angepasst werden. Üblicherweise wird im mittleren Leistungsbereich mit Schaltfrequenzen von 2-16KHz gearbeitet. 1.1 Synchronisierte Pulsweitenmodulation Bei der synchronisierten Pulsweitenmodulation entspricht die Anzahl der Pulse immer einem ganzzahligen Vielfachen der Grundschwingung. Die asynchrone Pulsweitenmodulation berücksichtigt dies nicht, weshalb es bei geringen Schaltfrequenzen zu deutlichen Unterschwingungen kommen kann. Die folgende Abbildung verdeutlicht diesen Zusammenhang. uR0 asynchron t uR0 synchron t Abbildung 1.1: Synchrone und asynchrone Modulation Speziell für große Maschinen, bei denen die Schaltfrequenz gering gewählt wird, damit im Umrichter nicht so viele Verluste anfallen, kommen synchrone Pulsmuster zur Anwendung. Da durch die schlechtere Approximation der Sinusschwingung für kleine Schaltfrequenzen wesentlich größere harmonische Ströme resultieren, kommen hierfür meist optimierte Pulsmuster zur Anwendung, die über einen Antriebsrechner berechnet werden. Für Anwendungen bei denen die Schaltfrequenz >1KHz ist werden üblicherweise asynchrone Pulsmuster verwendet. Synchrone Pulsmuster besitzten den Nachteil, dass bei Änderung der Grundschwingungsfrequenz, die Schaltfrequenz ebenfalls geändert werden muss, bzw. die Grundwellenfrequenz muss sprunghaft geändert werden, damit die Schaltfrequenz immer ein Vielfaches davon ist. 1.2 Unterschwingungsverfahren Das Unterschwingungsverfahren ist die einfachste Möglichkeit ein beliebiges Signal mittels einer Pulsweitenmodulation zu approximieren. Die Realisierung dieses Verfahrens ist sehr einfach mit wenigen Analogbausteinen möglich. Im Zuge der Verbreitung von Mikrorechnern in der 2 Antriebstechnik wurde diese Methode weitestgehend verdrängt. Wobei für das Verständnis komplizierterer Modulationsverfahren das Unterschwingungsverfahren oft als Grundlage dient. Trotz des Einzuges der Mikrorechner in dieses Segment gibt es noch einige Spezialanwendungen, bei denen auf Analogtechnik nicht verzichtet werden kann. Dies ist zum Beispiel der Fall für extrem schnell laufende Motoren, welche in einigen Fällen noch mit Analogtechnik geregelt werden. Bei dem Unterschwingungsverfahren wird das zu modulierende Signal mit einem periodischen Referenzsignal verglichen. Aus den Schnittpunkten dieser beiden Signale resultiert dann das modulierte Signal. Um zu gewährleisten, dass bei diesem Verfahren der arithmetische Mittelwert des Referenzsignals auf das modulierte Signal abgebildet wird, muss als Referenzsignal ein stückweise lineares Signal verwendet werden. Üblicherweise kommt hierfür nur ein Sägezahn, oder ein Dreiecksignal in Frage. Da in der Maschine die Induktivitäten gegenüber den Widerständen dominieren, gibt der Wert des Effektivwertes keine Aussage bezüglich der umgesetzten Leistung. Beispielsweise könnte die Pulsbreite halbiert werden und die Zwischenkreisspannung verdoppelt werden. Es würde ein deutlich erhöhter Effektivwert resultieren, jedoch würde die umgesetzte Leistung annährend dieselbe bleiben. Bei diesem Verfahren kann sowohl asynchron, als auch synchron moduliert werden. In der Praxis sind jedoch die Schaltfrequenzen um ein Vielfaches größer, als die Grundwellenfrequenz, weshalb der Unterschwingungsanteil bei der asynchronen Modulation quasi vernachlässigbar ist. Das Referenzsignal, welche mit dem Dreiecksignal verglichen wird kann beliebig aussehen. Üblicherweise wird aber als Referenzsignal ein sinusförmiges Signal verwendet, wodurch dann die Rede von der Sinus-Dreieck Modulation ist. Die folgende Abbildung verdeutlicht die Funktionsweise. u* uD uR0 t t Abbildung 1.2: synchrone Modulation mittels Unterschingungsverfahren Im Gegensatz zu der synchronen Abtastung, wird bei der asynchronen Abtastung deutlich, dass bei kleinen Schaltfrequenzen, die Pulsmuster pro Periode deutlich varrieren. Die Erzeugung der Pulsmuster für die Stränge uS0 und uR0 wird analog durchgeführt. Mittels der Sinus-Dreieck Modulation können mit Schaltfrequenzen, die ein Vielfaches der Grundwellenfrequenz betragen, die Oberwellen deutlich reduziert werden. Auch die Regelung der Maschine mittels der feldorientierten Regelung, oder der U/f- Kennlinie, wird deutlich einfacher, da die berechneten Spannungsraumzeiger unverändert auf die Maschine geschaltet werden können. Wesentliches Kriterium für die Regelung ist hierbei wie oben erwähnt ebenfalls eine hohe Schaltfrequenz. Wie bereits oben erwähnt, werden durch das Tiefpassverhalten der Maschine hochfrequente Komponenten in der Spannung deutlich kleiner gewichtet als niederfrequente. Eine Erhöhung der Schaltfrequenz verringert somit die Verluste hervorgerufen durch Oberwellen. Die entstehenden Oberwellen rufen in der Maschine nicht nur Verluste hervor, sondern sorgen 3 u* uD uR0 t t Abbildung 1.3: asynchrone Modulation mittels Unterschingungsverfahren auch für ein unrunderes Laufverhalten. Bei großen Maschinen fällt der zweite Punkt nicht so deutlich ins Gewicht, da durch die große Massenträgheit kleinere Drehmomentschwankungen nciht ins Gewicht fallen. Nachteilig bei diesem Verfahren ist die geringe Aussteuerung, welche auch Modulationsindex genannt wird. Der Modulationsindex im Blockbetrieb beträgt 1 und wird als Referenz für andere Verfahren verwendet. Hingegen der maximal mögliche Modulationsindex bei SinusDreieckmodulation 0,785 beträgt. Der Modulationsindex definiert sich als Quotient des Spannungswertes einer beliebigen Modulation zu der ersten harmonischen des Blockbetriebs. Die nächste Abbildung verdeutlicht den Aussteuerungsgrad und die o.g. Regeleigenschaften für die Sinus-Dreieck Modulation. Der geringe Modulationsindex ergibt sich, da mit diesem Verfahren nicht annährend die volle Spannung genutzt wird, welche zur Verfügung steht. Abbildung 1.4: Aussteuerung Sinus-Dreieck Modulation und Blockbetrieb Bezüglich der Zeichung 1.4 ist hervorzuheben, dass die Sinusdreieckmodulation im Vergleich zum Blockbetrieb kontinuierlich abläuft. Im Blockbetrieb wird immer ein Zeiger geschaltet und nach einer gewissen Dauer auf den nächsten gesprungen. 4 1.3 Vertiefung der obigen Zusammenhänge 1.3.1 Mittels des Unterschwingungsverfahrens soll eine PWM erzeugt werden. Die Amplitude der sinusförmigen Sollspannung soll 50 Prozent von der dreieckförmigen Referenzspannung betragen. Die Frequenz der Sollspannung ist 10 mal kleiner als diejenige der Referenzspannung. Zeichnen Sie die Sollspannung und das resultierende Pulsmuster für eine Phase. t t Abbildung 1.5: Sinus-Dreieck Modulation 1.3.2 Um was für eine Art der Sinus-Dreieckmodulation handelt es sich in Aufgabe 1.3.1? 1.3.3 Aus welchem Grund fällt es schwer die Pulsmuster der Sinus-Dreieck Modulation analytisch zu berechnen? 5 . 1.3.4 Welche Probleme treten bei der Sinus-Dreieck Modulation bei höheren Aussteuerungen auf? Abbildung 1.6: Sinus-Dreieck Modulation 6 Im Bereich der maximalen Aussteuerung, werden die Pulse bei der Sinusdreieck- Modulation extrem schmal. Es müssen jedoch Mindesteinschaltzeiten aufgrund der Beschaffenheit der Leistungshalbleiter eingehalten werden. Diese sind erforderlich, da aufgrund der Leitungskapazität und der wirksamen Induktivität Einschwingvorgänge stattfinden. Die Frequenz des Einschwingvorgangs wird dominiert von der Leitungskapazität, demnach führt eine lange Motorleitung zu deutlich tieffrequenteren Schwingungen, welche längere Zeit brauchen um abzuklingen. Hinzu kommt, dass eine Totzeit berücksichtigt werden muss, die in praktischen Anwendung mittlerere Leistung ca. 2µs dauert. In dieser Zeit ist weder der eine Halbleiter, noch der andere Halbleiter eingeschaltet. Hierdurch wird sichergestellt, dass nicht der Fall eintreten kann, dass beide Ventile eines Brückenzweiges in irgendeinerweise leitend sind. Selbst eine kurz Überlappung würde nach einiger Betriebszeit zur Zerstörung der Halbleiter führen, ohne das die Umrichterschutzeinrichtungen hiervon Notiz nehmen müssten. Abbildung 1.7: a) Totzeit, b) Einschwingvorgang nach Schalthandlung 7 1.3.5 Erklären Sie den Unterschied zwischen symmetrischer und unsymmetrischer PWM und welche Unterschiede bestehen bei beiden Varianten. Abbildung 1.8: Spannungsfehler bei symetrischer und unsymetrischer PWM 8 1.3.6 Im Vergleich zum Blockbetrieb besitzt das Unterschwingungsverfahren einen deutlich kleineren Modulationsindex. Bestimmen Sie diesen, zeichnen Sie den Modulationsbereich in ein Raumzeigerdiagramm und erläutern Sie die Bedeutung des Modulationsindizes. Abbildung 1.9: Spannungen 9 . Abbildung 1.10: Modulationsbereich Sinus-Dreieck-Modulation 10 . 11 1.3.7 Vervollständigen Sie die folgende Abbildung um die fehlenden Spannungen. Die Referenzwerte sind bezogen auf Phase a jeweils die Winkel 60◦ und 90◦ . t uA0 t uB0 t uC0 uM0 ud/2 t uAM ud t uAB ud t Abbildung 1.11: Synchrone und asynchrone Modulation 12