Signalklemmen - Micro Intecno
Werbung

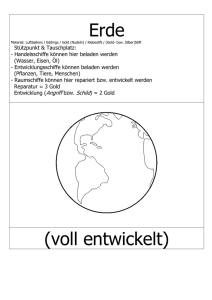
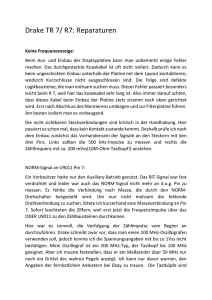
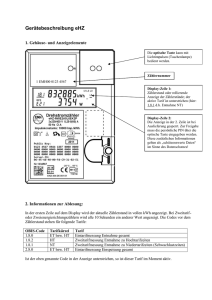
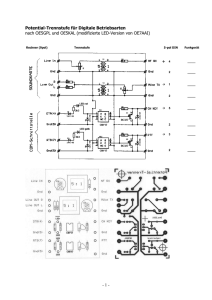
Signalklemmen Beschreibung Klemmenleiste KLEMMENLEISTE M1 Diese Klemme kann auf 2 verschiedene Betriebsarten eingestellt werden: Ansicht Klemmenleiste 1 CURR / IN2 Die folgende Abbildung zeigt eine Ansicht der Umrichter-Klemmenleiste Die austauschbare 16-polige Klemmenleiste im Lochraster 3,81 dient als Eingangs- und Ausgangsschnittstelle für die Signale des Umrichters (M1) Die austauschbare 5-polige Klemmenleiste im Lochraster 5,08 dient als Schnittstelle zum Umrichter (POWER) (Eingang) IN2: So konfiguriert, kann der Motor in einer Drehrichtung gesperrt werden (Erläuterungen bei Intecno anfordern) 2 FAULT (OUT) A) 3 REQ / IN1 Rotor Drehzahlgeber Signalklemmen Hauptstromklemmen Hilfspannung +10 V, max. 4 mA 6 –10V (OUT) Hilfspannung +10 V, max. 4 mA 7 START (IN) Betriebsfreigabe des Umrichters (Bereich bis einschließlich >+9 V und +30 V= max.). 8 +VEL (IN) Drehzahldifferenzeingang positiv 9 -VEL (IN) Drehzahldifferenzeingang negativ 10 ENC A Eingang Drehzahlgeber A (das Signal kann vom Drehzahlgeber stammen, der mit +5 V bis +24 V betrieben wird). Logikpegel H > 2,8 V min., +24 V max. , Logikpegel L < 1,5 V. 11 ENC B (IN) Eingang Drehzahlgeber Kanal B. (das Signal kann vom Drehzahlgeber stammen, der mit 5 V bis +24 V betrieben wird). Logikpegel H > 2,8 V min., +24 V max. , Logikpegel L 12 +V (OUT) Gleichspannungsanschluss Plus 13 GND U (OUT) Gleichspannungsanschluss Minus. Entspricht dem gemeinsamen M t ti l GND Motoranschluss Phase U V (OUT) Motoranschluss Phase V 15 HALL 2 (IN) W (OUT) Motoranschluss Phase W 16 HALL 3 (IN) (IN) Gemeinsame Umrichtersignalmasse. Entspricht der Minusseite am Eingang GND < 1,5 V. NETZANSCHLUSS GND Begrenzung des gelieferten Stroms 5 +10V (OUT) Hauptstromklemmen (IN) B) (Eingang) IN1: So konfiguriert, kann der Motor in einer Drehrichtung gesperrt werden (Erläuterungen bei Intecno anfordern) 4 GND +HV Umrichter stromgesteuert: Die Steuerung erfolgt durch Anlegen eines Signales von ±10 V max., das dem vom Umrichter gelieferten positiven und negativen Anlaufstrom entspricht. In diesem Fall wird die Drehzahlrückkopplung automatisch übergangen, ohne das System zu stören. In dieser Betriebsart kann der gelieferte Strom über einen externen Widerstand begrenzt werden. Einen externen Widerstand oder Potentiometer zwischen den Klemmen REQ und GND anschließen. HINWEIS: Je nach zu steuerndem Motortyp sind die Anschlüsse für die Anwendung zu konfigurieren. Trimmer Ansprechen des Umrichterschutzes. Open Collector, Strom max. 50 mA (normalerweise geschlossen, öffnet durch Ansprechen eines beliebigen Schutzes) Diese als REQ konfigurierte Klemme kann in zwei unterschiedlichen Betriebsarten verwendet werden “siehe Kapitel 2.8” Am Prüfpunkt "TEST" kann das Drehzahlsignal des Motors angezeigt werden. Das Ausgangssignal von 0 bis ±8 V entspricht der Drehzahl vom Stillstand bis zur Maximalgeschwindigkeit. An diesem Punkt ist es möglich, das Signal zu analysieren, wenn eine der folgenden Rückkopplungen aktiviert ist. • • Strommessung CURR (Ausgang): ±8 V, entspricht dem positiven und negativen Spitzenstrom IPK des Umrichters (Standardeinstellung) . HINWEIS: Auch die Anschlusspläne in den folgenden Kapiteln beachten! 14 HALL 1 (IN) Hilfspannung +10 V, max. 130 mA Gemeinsame Umrichtersignalmasse. Entspricht der Minusseite am Eingang GND. Eingang Hall-Sonde vom Motor. Jeder Eingang besitzt einen Pull-up-Widerstand von 1 kΩ an +5 V. Logikpegel H min. > 3,2 V, Logikpegel L < 1,5 V. Die Hall-Sensoren am Motor sind immer mit der Hilfsspannung +V des Treibers (Klemme 12) zu speisen. Bei Verwendung einer Stromversorgung ist die Lötbrücke S11 (OFF) zu öffnen. 1 2 Abgleichen mittels Stecksockel Interner Abgleich Die Bestückung zum Abgleich befindet sich innerhalb des Umrichters. Für den Zugang ist die Geräteabdeckung zu entfernen (siehe Abbildung). Zum Abgleichen ist die Steckfassung zu bestücken. An diesen Stellen sind vorzugsweise 1/4-W-Widerstände einzustecken. Es gibt auch 11 Lötbrücken, mit denen es möglich ist, FUNKTIONEN Funktionen oder Teile des Umrichters zu aktivieren oder deaktivieren. RDT Nicht verwendet RENC Abgleichwiderstand für Endwert des Drehzahlgebers. Der Umrichter wird in Standardkonfiguration (Hall-Sensoren als Rückkopplung) mit folgenden geschlossenen Lötbrücken (ON) geliefert. RA Abgleichwiderstand für die maximale Drehzahl des Rotors. RCA Kompensationswiderstand für den Spannungsfall am Motor-Innenwiderstand Ri. RIN Begrenzungswiderstand für Motornennstrom RIP Begrenzungswiderstand für Motorspitzenstrom RKV GAIN RACC Kapazität, die (gemeinsam mit CKV) den proportionalen/integralen Verstärkungsfaktor für die Drehzahlregelkreises bildet. Beide (CKV und RKV), können durch Öffnen der Lötbrücke S4 (Deaktivierung des werksseitigen Wertes von 100 k Ω- 47nF) ersetzt werden Bestimmt die statische Verstärkung des Drehzahlregelkreises. Eingabe eines neuen Wertes durch Öffnen der Brücke S5 (Deaktivierung des inneren Standardwertes von 27 Ω) Widerstand zum Festlegen der Motorbeschleunigungsrampe. Kapazität, die (gemeinsam mit RKV) den proportionalen/integralen Verstärkungsfaktor für die Drehzahlregelkreises bildet. Beide (CKV und RKV), können durch Öffnen der Lötbrücke S4 (Deaktivierung des werksseitigen Wertes von 100 kΩ - 47nF) ersetzt werden CKV CDER Durch Einsetzen einer Kapazität wird die Grenzwert der abgeleiteten Konstante gegenüber dem serienmäßig eingestellten Wert angehoben. Hinweis: Bei den verschiedenen Konfigurationen des BrushlessUmrichters (siehe nachfolgendes Kapitel) ist angegeben, welche Lötpunkte zu öffnen sind, welche geschlossen bleiben (ON) und wie die Steckfassung zu bestücken ist. Auf der linken Seite wird für jede gewählte Drehzahlrückkopplung eine typische Anschlussmöglichkeit mit einem Verkabelungshinweis für den Umrichter angegeben. 3 4 Brushless mit Hall-Sensoren Interne Einstellungen Hinweis: In den verschiedenen Abschnitten werden die Einstellungen für alle Rückkopplungen (siehe Abschnitt 2) angegeben. LÖTBRÜCKEN 1 Normalerweise offen (AUS) Umrichtereinstellung zum Steuern bürstenloser Motore. 2 Normalerweise geschlossen (EIN) Nicht ändern 3 Normalerweise offen (AUS) Diese Brücke muss für die Funktion Beschleunigungsrampe geschlossen werden. Offen (AUS) Diese Brücke muss für die Funktion Beschleunigungsrampe geschlossen werden. 4 Normalerweise geschlossen (EIN) Diese Brücke verknüpft die Standard-Konstanten mit dem Umrichter. (CKV = 47nF , RKV = 100 kΩ). Falls offen (AUS) sind die neuen Dynamikkonstanten CKV, RKV im Abgleichbereich einzustellen.. 5 Normalerweise geschlossen (EIN) Falls offen (AUS), muss der Widerstand GAIN (Statische Verstärkung), Standardwert = 27 Ω, eingestellt werden. 6 Normalerweise offen (AUS) Falls geschlossen (EIN), erlischt die grüne LED OK und "Ausgang FEHLER" am Pin 2 öffnet beim Ansprechen des Thermoschutzes IXT. 7 Normalerweise offen (AUS) Falls geschlossen (EIN), wird die Rückkopplung vom Rotor freigegeben, die Widerstände RA und RCA sind einzusetzen. 8 9 Normalerweise geschlossen (EIN) Falls geschlossen, wird die Rückkopplung vom Drehzahlgeber freigegeben. Der Widerstand RENC ist einzusetzen. Diese Brücke ist für die Wahl anderer Rückkopplungen offen (EIN) Normalerweise offen (AUS) Sollte geschlossen werden, wenn der Antrieb mit PWM+DIRSteuerung betrieben wird (optional). 10 Normalerweise geschlossen (EIN) Diese Brücke muss geöffnet werden, wenn das Tachogeneratorsignal an Klemme 10 des Umrichters gelegt wird. 11 Normalerweise geschlossen (EIN) Falls offen (AUS), deaktiviert der Alarm "Hall-Sonde fehlt" nicht den Umrichter. Auf dem Schema sind nur die Anschlüsse zum Umrichter für die Signale vom HallSensor angegeben. Diese Signale werden vom Umrichter zum Steuern des Stroms und für die Regelung der Motordrehzahl verwendet. Der Regelbereich ist niedriger als bei Drehzahlgeber + Hall-Sensor, reicht aber für viele Anwendungen aus. ACHTUNG! Die Hall-Sensoren immer mit der am Umrichter vorhandenen Versorgungsspannung +5 V zu speisen. Falls eine externes Netzteil verwendet wird, ist die Lötbrücke S11 zu öffnen 5 6 Brushless mit Hall-Sensor-Rückkopplung Einstellwerte für Intecno-Motore Für diese Konfiguration muss der Umrichter BLD10 folgende interne Einstellungen aufweisen: LÖTBRÜCKEN Der BLD10 ist standardmäßig für den Motor BL043240 konfiguriert. RotorRückkopplung Zum Anpassen des Schemas an andere Motoren sind die Widerstände nach folgender Tabelle zu ändern. STECKFASSUNG Motortyp Strom [A] (Nenn/Spitze) Motorspannung [V]* Rin [Ω] Rip [Ω] RA [Ω] RCA [Ω] BL012 240 BL018 240 BLS022 240 BL025 24E BL032 240 BL043 240 BLS043 240 BL070 480/48E 3,5/7 510 7/14 7/14 5/10 7/14 7/14 7,5/15 24 24 24 24 24/36 24/36 24/36 48 820 1k5 3k9 3k9 1k5 3k9 3k9 --- 27k 47k 120k 120k 47k 120k 120k --- 4k7 4k7 4k7 4k7 8k2 8k2 8k2 18k 68 k 120k 120k 180k 150k 220k 220k 470k * Am Schaltungseingang eine 5 - 6 V höhere Gleichspannung anlegen, als der Motor benötigt. Legende: Rin = Begrenzungswiderstand für den mittleren Strom Rip = Begrenzungswiderstand für den Kurzzeitstrom RCA = Kalibrierwiderstand zur Kompensation des Drehzahlabfalls RA = Kalibrierwiderstand für den Endwert Standardeinstellung aller Lötbrücken für: - Rotor-Rückkopplung - BÜRSTENLOSE Motoren - Ohne Rampe Für die korrekte Dimensionierung des Widerstandes vom Endwert RA und RCA siehe Kapitel Rip Rin RCA RA Die Farbkodierung mittels Ringe der Widerstandswerte ist in Anhang A (Seite 37) zu finden. 7 8 Einstellen der Beschleunigungsrampe Diese Funktion ist standardmäßig nicht aktiviert (Brücke S3 offen) Zum Aktivieren der Beschleunigungsrampe ist die Lötbrücke S3 zu schließen und der Widerstand RACC gemäß Tabelle in die Steckfassung einzustecken. HINWEIS: Das Gerät wird serienmäßig mit einem Widerstandswert von 470 Ω (Rampenzeit 0,8 s) geliefert. Die angegebenen Zeiten beziehen sich auf die stufenweise Variation der Referenzspannung am Eingang VEL von 10 V. Im Beispiel springt die Spannung von 0 auf 10 V, bzw. von 10 auf 0 V. Ohne Rampe (Standardeinstellung) VEL +3,3 T -2 MOTOR T Widerstand (Ω) 27 Ω ZEIT (Sekunden) 15 68 Ω 5 100 Ω 3,16 470 Ω 0,8 1 kΩ 0,32 1,5 kΩ 0,26 3,3 kΩ 0,16 10 kΩ 0,086 Beispiel Rampe eingefügt VEL +3,3 T -2 MOTOR T Beispiel 9 10 Beispielfoto für den Anschluss. Verwenden Sie geschirmte Leitungen für Verlängerungen. Anschluss von Intecno-Motoren Folgen Sie den Farbkennungen gemäß Abbildung: Anschlussadern für Kraftstrom (dicker) Gelb dick (oder blau) Motoranschluss U Rot dick (oder braun) Motoranschluss V Schwarz dick Motoranschluss W Signalleitungen (dünner) Rosso piccolo (+Vcc) Nero piccolo (GND) Blau (Hall-Sensor U) Grün (Hall-Sensor V) Weiß (Hall-Sensor W) : Stift 14 : Stift 15 : Stift 16 : Stift U : Stift V : Stift W : Stift 12 : Stift 13 MOTORE DRIVE Fili piccoli: HAll Rosso = pin 12 Nero = pin 13 Blue =pin 14 Verde = pin 15 Bianco = pin 16 1 CURR 2 FAULT 3 REQ 4 GND 5 +9,8V 6 ‐9.8V 7 START 8+VEL 9 ‐VEL 10 ENCA 11 ENCB 12 +V 13 GND 14 HALL1 15 HALL2 16 HALL 3 Richtungsumkehrung HW Für die Drehrichtungsumkehr des Motors ist wie folgt vorzugehen, falls die in der Schaltung angebotene Inversion nicht verwendet wird: a) Die Adern U und V für den Motoranschluss untereinander tauschen (gelb mit rot) und gleichzeitig b) die Adern zum Hall-Sensor an den Stiften 14 und 16 (blau mit weiss) tauschen. +HV GND U V W Fili grossi: potenza Giallo = pin U Rosso = pin V Nero =pin W Nur beim Motor BL070480 sind die Aderfarben anders, während die Signaladerfarben denen der anderen Motoren gleichen. DRIVE MOTORE (SOLO BL070480) Fili grossi: potenza Blu = pin U Marrone = pin V Nero = pin W +HV GND U V W Vereinfachtes Steuerungsschema FREIGABE: Verbinden Sie den Stift 7 mit Stift einem Netzteil mit 10 bis 24 V=). Die Aktivierung je nach Potentiometerstellung. Eingestellte Aktivierung negiert. Eine Unterbrechung des auslaufen. Der einfachste Anschluss des Kraftstromkreises erfolgt unmittelbar, wie nachstehend zu sehen: 5 (oder speisen sie es mit ermöglicht den Motorbetrieb Startrampen werden bei Stiftes 7 läßt den Motor 1 0 5 +9.8V 2 7 START Speed pot 5 +9,8V 6 ‐9,8V 8 +VEL 4 GND 10 kΩ-Potentiometer, Mittelabgriff (variabel) an Stift 8 anschließen (+VEL), einer der beiden äußeren Enden an Stift 4 (GND) und den anderen über einen 3-Stellungs-Schalter an seine Spannung legen, wie in der Zeichnung gezeigt. 0 = Halt 1 = Vorwärtslauf 2 = Rückwärtslauf Die Drehzahl wird durch das Potentiometer bestimmt, die Richtung durch die Polarität. 14 ANHANG A ETSCHLÜSSELUNG DER FARBKODIERTEN WIDERSTANDSWERTE Die für die Einstellungen verwendeten Widerstände weisen vier farbige Ring auf, wie auf dem Foto zu sehen. Für die Entschlüsselung der ohmschen Werte verwenden Sie die folgende Tabelle. Erster Ring = Zehnerstelle Zweiter Ring = Einerstelle Dritter Ring = Multiplikator Vierte Stelle = Toleranz FARBE, 1. RING 2. RING 3. RING 4. RING Schwarz - 0 x1 - Braun 1 1 10 - Rot 2 2 x 100 - Orange 3 3 x 1.000 - Gelb 4 4 x 10.000 - Grün 5 5 x 100.000 - Blau 6 6 x 1.000.000 - Violett 7 7 x 10.000.000 - x Grau 8 8 - - Weiss 9 9 - - GOLD - - : 10 5% SILBER - - : 100 10 % OHNE - - - 25 % Der auf dem Foto abgebildete Widerstand z.B.: Braun = 1 (Zehnerstelle) Schwarz = 0 (Einerstelle) Rot = Multiplikator x 100 Gold = Toleranz 5 % 10 x 100 = 1 kΩ, Toleranz 5 % 15