Massenmittelpunkt, Kinematik
Werbung

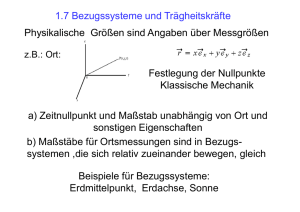
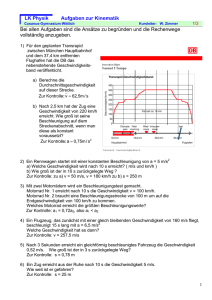
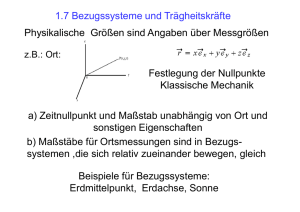
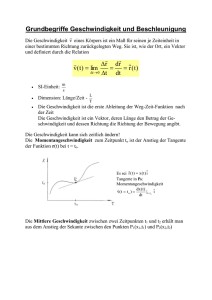
Massenmittelpunkt, Kinematik Massenmittelpunkt, Kinematik Mechanik basiert auf der Bilanz von Impuls und Drehimpuls. Mechanik ist aber auch Bewegungslehre (Kinematik). So hängt die Bewegung eines Körpers über die Geschwindigkeit und die Winkelgeschwindigkeit mit dem Impuls und dem Drehimpuls zusammen, d.h. Geschwindigkeit und Winkelgeschwindigkeit sind die Potenziale des Impulses und des Drehimpulses (Füllhöhen in den Flüssigkeitsbildern). Die beiden Potentialgrössen liefern deshalb auch das Energiebeladungsmass, d.h. sie bestimmen, wie stark der Impulsstrom bzw. der Drehimpulsstrom mit Energie beladen sind. In dieser Vorlesung werden Verbindungen zwischen der Kinematik und der Dynamik aufgezeigt. Wir beschränken uns dabei auf die Aspekte, die für technische Anwendungen von grosser Bedeutung sind. Lernziele In dieser Vorlesung lernen Sie • die Bedeutung des Massenmittelpunktes kennen • wie man die Lage des Massenmittelpunktes berechnet • wie man Tangential- und Normalbeschleunigung eines beliebigen Punktes beim rotierenden Körper bestimmt • wie man beim starren Körper aus der Geschwindigkeit eines gegebenen Punktes und der Winkelgeschwindigkeit den Bewegungszustand eines weiteren Punktes berechnet • wann man eine Zentrifugalkraft einführen darf und auch muss • dass die Zentrifugalkraft der statischen und die Corioliskraft der dynamischen Teil einer auf rotierenden Bezugssystemen einzuführenden Trägheitskraft ist Massenmittelpunkt Auf einer langen Luftkissenbahn bewegen sich verschieden schwere Gleiter mit unterschiedlichen Geschwindigkeiten aufeinander zu. Weil die Gleiter mit Klettverschlüssen ausgerüstet sind, gleichen sich ihre Geschwindigkeiten an. Die gemeinsame Endgeschwindigkeit aller Gleiter lässt sich ohne Kenntnis der Aufpralldynamik vorhersagen Im Flüssigkeitsbild besagt diese Formel, dass die sich einstellende Impulsausgleich im inelastischen Stoss Füllhöhe (Geschwindigkeit) gleich dem total gespeicherten "Volumen" (Impuls) dividiert durch den Gesamtquerschnitt (totale Masse) aller miteinander verbundenen Gefässe (Gleiter) ist. Weil diese Endgeschwindigkeit zum vornherein fest steht, postuliert man für jedes isolierte System eine charakteristische Geschwindigkeit, die gleich dem Quotienten aus gespeichertem Impuls und totaler Masse ist. Diese Idee lässt sich problemlos auf alle Richtungen ausdehnen 1 Massenmittelpunkt, Kinematik 2 Die sich einstellende Endgeschwindigkeit heisst Geschwindigkeit des Massenmittelpunktes (MMP) oder manchmal etwas ungenau Geschwindigkeit des Schwerpunktes. Ersetzt man den Impuls der Teilsysteme durch das kapazitives Gesetz, erhält man die Geschwindigkeit als gewichtetes Mittel über alle Einzelgeschwindigkeiten Schwerpunkt beschleunigt mit 9.8 m/s2 Integriert man diese Gleichung beidseits über ein beliebiges Zeitintervall, ergibt der linke Term die Strecke, um die sich der Massenmittelpunkt im Raum verschoben hat. Mit dieser Formel lässt sich auch die momentane Lage des Massenmittelpunktes berechnen Setzt man die Geschwindigkeit des Massenmittelpunktes in die Impulsbilanz ein, erhält man die allgemeinste Form des Grundgesetzes der Mechanik Hier wird angenommen, dass das Gravitationsfeld homogen ist, also auf alle Teilsysteme gleich stark wirkt. Selbstverständlich dürfen in der Bilanz nur die Stärken von Impulsströmen gezählt werden, die über die Systemgrenze fliessen (äussere Kräfte). starrer Körper Prallt ein Vogel gegen die Scheibe einer Pilotenkanzel (engl. cockpit für Hahnengrube), liefert das Grundgesetz der Mechanik (Summe über alle Kräfte gleich Masse mal Beschleunigung des Massenmittelpunkts) keine direkt verwertbare Information, weil sich der Massenmittelpunkt beim Aufprall auch relativ zum Vogel bewegt. Eine analoge Situation findet man beim Einschlag einer Bleikugel in ein Holzbrett. Die Stärke des Impulsabflusses, die momentane Kraft, bestimmt die Beschleunigung des Massenmittelpunktes. Nur kann dieser Punkt während des Einschlages mit keinem Teil des Bleis identifiziert werden. Festkörper ändern ihre Gestalt unter nicht zu grosser Belastung kaum. Solche Körper werden durch das Modell des starren Körpers gut nachgebildet. Beim starren Körper ist der Massenmittelpunkt eine körperfeste Grösse. Zudem behalten alle andern materiellen Punkte ihre gegenseitige Lage bei. Mit dem dynamischen Verhalten des starren Körpers wollen wir uns in einer späteren Vorlesung beschäftigen. Hier begnügen wir uns mit den geometrischen (kinematischen) Aspekten des starren Körpers. Lage des MMP verändert sich Der Bewegungszustand des starren Körpers ist zu jedem Zeitpunkt durch die Geschwindigkeit eines beliebigen Punktes und durch seine Winkelgeschwindigkeit festgelegt. Weil die Impulsbilanz die Geschwindigkeit des Massenmittelpunktes liefert, geht man in der Regel auch von dieser speziellen Geschwindigkeit aus. Massenmittelpunkt, Kinematik 3 Rotation um starre Achse Einen starren Körper, der um eine feste Achse rotiert, nennt man Rotator. Bei einem Rotator beschreibt jeder Punkt eine Kreisbahn. Weil sich jede Linie auf dem Rotator in gleichen Zeiten um den gleichen Winkel dreht, gilt für den ganzen Körper zu jedem Zeitpunkt die gleiche Winkelgeschwindigkeit. Zwischen dem Weg (b für Bogenlänge), den ein Punkt im Abstand r von der Drehachse in einem bestimmten Zeitabschnitt zurücklegt und dem zugehörigen Drehwinkel Δφ besteht ein einfacher Zusammenhang Dividiert man diese Beziehung durch den Zeitabschnitt, ergibt sich ein Zusammenhang zwischen Betrag der Geschwindigkeit v, Schnelligkeit genannt, und der Winkelgeschwindigkeit Beschleunigung eines Punktes Denkt man sich den Zeitabschnitt beliebig kurz, ist die zweite Gleichung die Ableitung der ersten nach der Zeit. Eine weitere Ableitung nach der Zeit liefert einen Zusammenhang zwischen der Tangentialkomponente der Beschleunigung dieses Punktes at (Tangentialbeschleunigung) und der Winkelbeschleunigung α Die Beschleunigung ist die zweite Ableitung des Ortsvektors nach der Zeit. Weil wir hier nur den Weg (Bogen) bzw. die Schnelligkeit und nicht die Strecke bzw. die Geschwindigkeit abgeleitet haben, ist ein Teil der Beschleunigung "verloren" gegangen. Jeder Punkt, der auf einer Kreisbahn läuft, weist neben der Tangential- noch eine Beschleunigung auf, die gegen das Kreiszentrum gerichtet ist, also normal zur Geschwindigkeit steht und deshalb Normalbeschleunigung heisst Die Geschwindigkeit und die Normalbeschleunigung der Punkte auf einem sich drehenden Rotator nehmen proportional mit dem Abstand zur Drehachse zu. Ist zusätzlich noch eine Winkelbeschleunigung vorhanden, dreht also der Rotator immer schneller oder langsamer, gilt die gleiche radiale Abhängigkeit auch für die Tangentialbeschleunigung. Geschwindigkeiten auf starrem Körpern Hält man statt einer Achse nur einen Punkt des starren Körpers fest, wird aus dem Rotator ein Kreisel. Wirkt kein Drehmoment auf den Kreisel ein, bleibt sein Drehimpuls konstant (ein Drehmoment entspricht der Stärke eines Drehimpulsstromes oder einer Drehimpulsquelle). Je nach Form und Ausrichtung des Kreisels kann sich die Lage der Drehachse relativ zum Kreisel und relativ zum Bezugssystem auch bei konstantem Drehimpuls ändern. Dieses Phänomen nennt man Nutation. Weil die Drehachse dann weder körperfest noch raumfest ist, spricht man beim Kreisel nur noch von der momentanen Drehachse. Die momentane Drehachse wird durch die Punkte gebildet, die im Moment relativ zum Laborsystem in Ruhe sind Man kann zeigen, dass sich die Winkelgeschwindigkeit wie ein Vektor transformiert. Der Vektor der Winkelgeschwindigkeit zeigt immer parallel zur momentanen Drehachse. Dabei steht der Vektor der Winkelgeschwindigkeit zum Drehsinn wie der Daumen der rechten Hand zu seinen Finger (Rechte-Hand-Regel). Die momentane Geschwindigkeit eines Punktes auf dem Kreisel ergibt sich nun durch ein Vektorprodukt wobei der Vektor r von einem beliebigen Punkt auf der momentanen Drehachse zum fraglichen Punkt zeigt. Massenmittelpunkt, Kinematik 4 Beispiel 1: Ein Güterzug fährt mit 108 km/h geradeaus. Welche Maximalgeschwindigkeit erreichen die oberste Punkte auf dem Spurkranz (überkragender Wulst auf der Innenseite der Lauffläche des Rades)? Wie schnell bewegt sich der im Moment tiefst gelegene Punkt auf dem Spurkranz? Der Durchmesser des Radlaufkreises beträgt 920 mm, der Spurkranz weise einen Durchmesser 980 mm auf. Die momentane Drehachse liegt auf der Lauffläche, dort wo das Rad die Schiene berührt. Für die Geschwindigkeit der Radachse gilt der oben formulierte Zusammenhang. Folglich ist die Winkelgeschwindigkeit gleich = 65.2 1/s Der obersten Punkt des Spurkranzes liegt 950 mm über der Lauffläche der Schiene. Multipliziert man diese Distanz mit der Winkelgeschwindigkeit, ergibt sich eine Geschwindigkeit von 61.95 m/s oder 223 km/h. Der tiefste gelegene Punkt des Spurkranzes liegt 30 mm unterhalb der Lauffläche. Folglich bewegt er sich mit 1.96 m/s oder 7 km/h gegen den Güterzug. Die oben formulierte Beziehung zwischen Winkelgeschwindigkeit und Geschwindigkeit erlaubt die Berechnung der Geschwindigkeit (als Vektor) für einen beliebigen Punkt auf dem Rad eines Zuges oder eines Autos. Nimmt man zwei verschiedene Punkte (A und B) und subtrahiert die Geschwindigkeiten voneinander, erhält man eine noch allgemeinere Form oder Umgeformt Geschwindigkeiten auf rotierendem Körper Der Vektor rAB zeigt vom Punkt A zum Punkt B. Beispiel 2: Ein Planetengetriebe ist ein einfaches Getriebe, bei dem sich quasi das Gehäuse auch noch drehen kann. Das Getriebe besitzt deshalb drei Wellen, eine für das Sonnenrad, eine für das Hohlrad und eine für den Träger der Planetenräder. Die Kinematik von Getrieben beruht auf der Abrollbewegung von Teilkreisen. Folglich sind die Drehzahlen der drei Achsen über diese Abrollbewegung gekoppelt. Der Teilkreisradius des Sonnenrades sei gleich r, der Radius des Hohlrades wird mit R bezeichnet. Die Radien der Planetenräder ist dann gleich der halben Differenz dieser beiden Radien. Bezüglich der Achse eines Planetenrades gilt Die Geschwindigkeit der Achse eines Planetenrades ist gleich der Planetengetriebe Winkelgeschwindigkeit des Planetenradträgers (Index T) mal den Abstand von der Achse des Getriebes oder gleich der Geschwindigkeit des Sonnenrades (Index S) plus die Winkelgeschwindigkeit des Planetenrades (Index P) mal die zugehörige Distanz. Bezüglich eines zwischen Planetenrad und Hohlrad liegenden Berührpunktes (Index H) kann eine analoge Formulierung gefunden werden Setzt man die obere Gleichung in die untere ein (Winkelgeschwindigkeit des Planetenrades eliminieren), erhält man die kinematische Grundgleichung für das Planetengetriebe Hält man wahlweise eine der drei Achsen fest, ergeben sich drei gewöhnliche Getriebe. Die zugehörigen Übersetzungsverhältnisse können direkt der kinematischen Grundgleichung entnommen werden. Drehen sich das Massenmittelpunkt, Kinematik Sonnenrad und das Hohlrad mit der gleichen Winkelgeschwindigkeit, dreht sich der Träger des Planetengetriebes trivialerweise ebenfalls mit dieser Winkelgeschwindigkeit. Ausblick Die Geschwindigkeit ist das Potenzial der Translationsmechanik, d.h. die Geschwindigkeit des Massenmittelpunkts sagt, wie viel Impuls ein Körper mit gegebener Masse speichert, und die Geschwindigkeit einer Referenzfläche legt fest, wie stark ein Impulsstrom mit Energie beladen ist. Desgleichen für die Winkelgeschwindigkeit. Die Winkelgeschwindigkeit sagt, wie viel Drehimpuls ein bestimmter Körper speichert und wie stark ein Drehimpulsstrom mit Energie beladen ist. Auch aus kinematischer Sicht sind Geschwindigkeit und Winkelgeschwindigkeit einfacher zu handhaben als Ort bzw. Winkel oder Beschleunigung bzw. Winkelbeschleunigung. Ort und Lage Dividiert man den Impulsinhalt eines starren Körpers durch dessen Masse, erhält man die Geschwindigkeit des Massenmittelpunktes. Analog dazu lässt sich die Winkelgeschwindigkeit aus dem Drehimpuls berechnen, nur ist das zugehörige Berechnungsverfahren um einiges komplizierter. Sind aber Geschwindigkeit und Winkelgeschwindigkeit zu einem bestimmten Zeitpunkt bekannt, kann mit der oben aufgeführten Formel die Geschwindigkeit eines beliebigen Punktes auf dem starren Körper bestimmt werden. Der Ort des Massenmittelpunktes ist - wie schon in der Translationsmechanik mehrfach ausgeführt - durch eine Integration der zugehörigen Geschwindigkeit über die Zeit zu ermitteln. Die Berechnung der Orientierung (Lage) des Körpers ist dagegen um einiges komplizierter und nicht durch eine einfache Integration der Winkelgeschwindigkeit über die Zeit zu ermitteln. Um diese Schwierigkeit, die mit der geometrischen Struktur der Drehung zusammenhängt, zu umgehen, werden wir uns in dieser Vorlesung hauptsächlich mit der ebenen Bewegung beschäftigen. rotierendes Bezugssystem Üblicherweise beschreibt man die Bewegung der Körper bezüglich des Systems Erde. Dabei nimmt man an, dass sich diese nicht bewegt (Ruhesystem). Mechanische Vorgänge können aber auch relativ zu einem gleichmässig rotierenden Bezugssystem, etwa einem Karussell, beschrieben werden. In diesem Fall muss die Gravitationskraft durch zwei ebenfalls massenspezifische Volumenkräfte (Impulsquellen), die Zentrifugalkraft und die Corioliskraft, ergänzt werden. Die Zentrifugalkraft hängt nur vom Ort ab und kann wie die Gewichtskraft als Masse mal Stärke eines Zentrifugalfeldes beschrieben werden. Die Corioliskraft hängt dagegen nur von der Geschwindigkeit und nicht vom Ort ab. Diese Geschwindigkeit ist relativ zum rotierenden Bezugssystem zu messen. Weil die Erde rotiert und um die Sonne fällt, stellt sie kein echtes Ruhesystem dar. Dennoch merken wir von der zweifachen Bewegung der Erde wenig. Dies hängt mit der Besonderheit der Gravitation zusammen. Durch die Fallbewegung wird das Gravitationsfeld der Sonne bis auf eine kleine Störung (Gezeitenfeld) wegtransformiert (Schwerelosigkeit). Die Corioliskraft ist so schwach, dass sie sich nur bei grossräumigen Bewegungen wie etwa bei Winden bemerkbarmacht. Und die Zentrifugalkraft ist nicht direkt nachweisbar, weil das Zentrifugalfeld dem Gravitationsfeld der Erde überlagert ist und von uns nur gemeinsam mit diesem gemessen werden kann. Wenn wir also feststellen, dass das Gravitationsfeld in Winterthur eine Stärke von 9.8067 N/kg hat, dann steckt in diesem Wert auch ein Anteil Zentrifugalfeld drin. Leider wird der Begriff Zentrifugalkraft oft bei der Kreisbewegung eines einzelnen Körpers verwendet. Dort hat diese Grösse aber gar nichts zu suchen. Ein Körper bewegt sich auf einer Kreisbahn, weil er über ein Seil, die Haftreibung oder einen andern "Impuls-Leiter" Bewegungsmenge mit der Umgebung austauscht. 5 Massenmittelpunkt, Kinematik 6 Kontrollfragen 1. Wie berechnet man die Lage des Massenmittelpunktes eines zusammengesetzten Körpers? 2. Kraft gleich Masse mal Beschleunigung. Übersetzen Sie diese Aussage in das Grundgesetz der Mechanik in seiner allgemeinsten Form. 3. Ein Körper dreht sich pro Sekunde einmal um die eigene Achse. Wie gross ist die Beschleunigung eines Punktes im Abstand von 0.5 m? 4. Wie berechnet man die Geschwindigkeit eines beliebigen Punktes auf dem Bugrad eines Flugzeuges, falls die Geschwindigkeit des Flugzeuges und die momentane Drehzahl des Bugrades gegeben sind? 5. Eine Walze (Radius r) rollt auf einem zweiten Zylinder ab (Radius R). Wie berechnet man die Geschwindigkeit der Walzenachse, wenn der Zylinder mit ωZ um eine ruhende Achse rotiert und sich die Walze mit ωW dreht? 6. Wann muss eine Zentrifugalkraft eingeführt werden? Wann darf man unter keinen Umständen eine Zentrifugalkraft einführen? Antworten zu den Kontrollfragen 1. Die Lage des Massenmittelpunktes eines aus verschiedenen Teilen zusammen gesetzten Körpers berechnet sich als gewichtetes Mittel der Positionen der Einzelkörper . 2. Die Summe über alle am Körper angreifenden Kräfte (inkl. Gewichts-, Zentrifugal-, Coriolis- und anderer Volumenkräfte) ist gleich Masse mal die Beschleunigung des Massenmittelpunktes des Körpers (relativ zum gewählten Bezugssystem). 3. Die (Normal-)Beschleunigung ist gleich das Quadrat der Winkelgeschwindigkeit mal der Abstand zur Drehachse, also gleich 19.7 m/s2. 4. Die Geschwindigkeit eines beliebigen Punktes P ist gleich: 5. Ein Punkt auf dem Umfang des Zylinders bewegt sich mit ωZR. Somit ist die Geschwindigkeit der Walzenachse gleich . 6. Die Zentrifugalkraft tritt auf, sobald sich der Beobachter in einem rotierenden Bezugssystem befindet. Die Zentrifugalkraft ist eine massenproportionale Volumenkraft, die linear mit dem Abstand zur Drehachse des Bezugssystems zunimmt. Analysiert man die Bewegung von einem nicht rotierenden Bezugssystem aus, darf unter keinen Umständen eine Zentrifugalkraft eingeführt werden. Wer also bei einer blossen Kreisbewegung eines Körpers bezüglich eines Inertialsystems von einer Zentrifugalkraft spricht, gehört zu den hoffnungsloseren Fällen in Bezug auf ein tieferes Verständnis der Mechanik. Materialien • Videoaufzeichnung [1] • Kurzfassung auf Youtube [2] Physik und Systemwissenschaft in Aviatik 2014 Physik und Systemwissenschaft in Aviatik Quellennachweise [1] https:/ / cast. switch. ch/ vod/ clips/ 1hidjw34ok/ link_box [2] http:/ / www. youtube. com/ watch?v=_4xDwwN6Eg0 Quelle(n) und Bearbeiter des/der Artikel(s) Quelle(n) und Bearbeiter des/der Artikel(s) Massenmittelpunkt, Kinematik Quelle: http://systemdesign.ch/index.php?oldid=12013 Bearbeiter: Admin Quelle(n), Lizenz(en) und Autor(en) des Bildes Bild:InelastischerStoss FB.png Quelle: http://systemdesign.ch/index.php?title=Datei:InelastischerStoss_FB.png Lizenz: unbekannt Bearbeiter: Admin Bild:Schwerpunkt Hochsprung.png Quelle: http://systemdesign.ch/index.php?title=Datei:Schwerpunkt_Hochsprung.png Lizenz: unbekannt Bearbeiter: Admin Bild:Bullet impact.gif Quelle: http://systemdesign.ch/index.php?title=Datei:Bullet_impact.gif Lizenz: unbekannt Bearbeiter: Admin Bild:Beschleunigung Rotation.png Quelle: http://systemdesign.ch/index.php?title=Datei:Beschleunigung_Rotation.png Lizenz: unbekannt Bearbeiter: Admin Bild:Geschwindigkeit Rotation.png Quelle: http://systemdesign.ch/index.php?title=Datei:Geschwindigkeit_Rotation.png Lizenz: unbekannt Bearbeiter: Admin Bild:Planetengetriebe2.gif Quelle: http://systemdesign.ch/index.php?title=Datei:Planetengetriebe2.gif Lizenz: unbekannt Bearbeiter: Admin 7