Bestimmung des maximalen Motorenstroms zur
Werbung

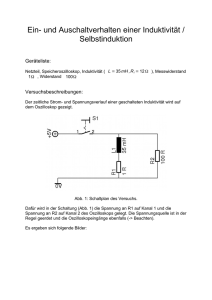
Bestimmung des maximalen Motorenstroms zur Lokdekoderauswahl Urs Egger Um den genügend leistungsfähigen Dekoder für eine Lok auszuwählen ist es notwendig den maximal möglichen Motorenstrom einer Lok zu kennen. Nachfolgend wird gezeigt wie ein Gleichstrommotor funktioniert und wie der Wert des maximalen Motorenstroms bestimmt werden kann. Prinzip eines Gleichstrommotors (DC-Permanentmagnet Motor) In einem stehenden Magnetfeld, erzeugt durch den Permanentmagneten, ist eine Spule drehbar gelagert. Die Spule ist über Kollektorbürsten elektrisch angeschlossen. Wird durch eine externe elektrische Spannung ein Strom durch die Spule aufgebracht, entsteht ein Magnetfeld welches zusammen mit dem Permanentmagnetfeld eine Kraft auf die Spule ausübt und diese auslenkt. Damit in der neuen mechanischen Position dasselbe wieder funktioniert ist die Spule mehrfach vorhanden auf dem Rotor (Anzahl Pole) und die elektrische Spannung wird über den Kollektor von Spule zu Spule weitergegeben. So passiert dass rundherum und der Motor und seine Antriebswelle rotieren. Sie können auch den Motor an der Welle antreiben und so eine elektrische Spannung erzeugen, dann ist es ein Generator. (Machen Sie einen Versuch mit dem Fahrraddynamo, evt. müssen Sie einen solchen etwas anschieben damit er bei ca. 3 Volt dreht als - sehr schlechter - Motor). Ein solcher Motor kann elektrisch als Serieschaltung einer Induktivität und eines Widerstandes betrachtet werden. Der Widerstand ist gegeben durch die Rotorspule, die Kollektoranschlüsse und die Anschlussdrähte. Die Induktivität ist gegeben durch die drehende Rotorspule im Magnetfeld. Ersatzschaltbild eines DC-Motors Der Rotor mit der Induktivität L dreht mit einer Rotationsgeschwindigkeit damit die Summe der Spannungen Ul und URi der externen Spannung U entsprechen. Die Spannung URi ist gegeben durch den Innenwiderstand Ri und den notwendigen Strom I damit der Rotor dreht. Der Strom I ist abhängig von der Last and der Motorwelle und motorinternen Verlusten. 2 Mitteilungsblatt VSDM 3/99 Der Rotor dreht IMMER genauso schnell dass die Spannung Ul gemäss Ul=n*L*k entsteht wobei n die Rotordrehzahl, L die Rotorinduktivität und k eine spezifische Motorkonstante sind. Da L und k konstant sind ist die Drehzahl direkt von der Spannung Ul abhängig. Warum wird dann die Drehzahl kleiner unter Last bei konstanter externer Spannung U? Wie oben gezeigt entspricht die äussere Spannung U der Summe aus der Spannung am Innenwiderstand und der Spannung an der Induktivität. Da mit zunehmendem Strom I die motorinterne Spannung URi zunimmt und die äussere Spannung U konstant bleibt, MUSS die Spannung an der Induktivität und somit die Drehzahl kleiner werden. Der Innenwiderstand ist abhängig von der Motorqualität (Material usw.) und ist vor allem auch relativ schlechter je kleiner oder billiger der Motor ist, da die mechanischen Toleranzen und elektrischen Eigenschaften schlechter zu bestimmen sind. Typische Kennlinien eines DC-Motors Zwei Arbeitspunkte sind in der obigen Grafik zu erwähnen: Leerlauf und Vollast. Leerlauf ist der Fall ohne Last an der Motorwelle. Hier fliesst der kleinste Motorenstrom und die Drehzahl ist am grössten und entspricht der motortypischen Leerlaufdrehzahl. Stillstand ist der Überlastungsfall mit Stillstand der Welle. Hier fliesst der maximal mögliche Motorenstrom (englisch: stall current) und der Rotor ist im Stillstand, hat also n=0. Gemäss oben gesagtem ist dann auch die Spannung an der Induktivität gleich Null und die GANZE äussere Spannung U liegt am Innenwiderstand Ri. Dieser Fall ist der Fall den es zu beachten gilt bei der Dekoderauswahl. Im Normalbetrieb sollte der Zustand mit abgewürgtem Motor (stehende Lok) und voller Fahrspannung nicht vorkommen aber... Mitteilungsblatt VSDM 3/99 3 Speziell bei regelnden Lokdekodern kann dieser Fall auch auftreten wenn Sie beispielsweise 20 % Geschwindigkeit einstellen am Fahrregler. Die Dekoderregelung versucht nun unter allen Lastfällen diese Sollgeschwindigkeit durch Regelung der Dekodermotorspannung innerhalb 0 bis 100 % einzustellen. Bei solchen Dekodern wissen Sie als Lokführer ohne Motoramperemeter also nicht in welchem Arbeitspunkt der Motor aktuell betrieben wird. Bei nicht regelnden Dekodern wählen Sie als Lokführer mit der Wahl der Fahrstufe auch direkt die Höhe der Motorspannung, allenfalls unter Beachtung einer lokdekoderinternen Geschwindigkeitskurve oder -tabelle. Wie wird der maximale Motorstrom bestimmt? Dazu gibt es drei einfache Methoden: - der Motorhersteller bzw. Lokhersteller gibt den Wert im Datenblatt an (leider ist dies heute zumeist noch nicht der Fall). Beachten Sie, dass der Wert nur einmal für jeden eingesetzten Motortyp bestimmt werden müsste, nicht für jede Lok individuell. - Sie messen direkt mit einem Ohmmeter den (Motor-)Innenwiderstand. Dazu messen Sie direkt den elektrischen Widerstand zwischen den zwei Polen der Lokstromabnahme. Dabei messen Sie allenfalls auch Lampen usw. mit, aber diesen Messfehler können Sie im allgemeinen übersehen und der Fehler würde einen zu kleinen Motorinnenwiderstand suggerieren, ist also auf der sicheren Seite. Beachten Sie dass der zu erwartende Wert für den Innenwiderstand nur einige Ohm ist (für HO etwa 10 Ohm) und nicht alle Messgeräte solch kleine Widerstandswerte genau messen. - Sie bestimmen den Wert in einem Versuch mit einem Strom- und Spannungsmessgerät. Dies ist die zumindest für den Motor wenigst angenehme Variante, da Sie ja genau einen Überlastfall mit stehender Lok erzeugen müssen. Dazu bauen Sie auf einem Gleis ein festes Hindernis auf und lassen die Lok SANFT! daran fahren. Dann wird die Fahrspannung aufgedreht und die Werte der Fahrspannung und der entstehende Strom gemessen. Der Versuch darf auch mit kleinerer Spannung als das mögliche Maximum gemacht werden. Wichtiger ist, dass die Fahrspannung möglichst Gleichspannung ist sonst misst das Messgerät mehr oder weniger ungenau. Der Motorinnenwiderstand kann gemäss Ri=U/I einfach aus den gemessenen Werten berechnet werden. Je nach Konstruktion der Lok und Getriebe bleibt sie in solchen Fällen einfach stehen mit abgewürgtem Motor oder die Lok steht und die Räder drehen durch bei kleinem Lokgewicht. Dann müssen Sie die Räder sonstwie blockieren um den richtigen (höheren) Wert für den Strom zu erhalten. Ein Versuch mit stillstehendem Motor soll nur kurzzeitig (einige Minuten) gemacht werden, da die üblichen Modellbahnmotoren nicht ausgelegt sind für einen solchen Betrieb und thermisch überlastet werden können. Der grösstmögliche Motorenstrom kann gemäss Imax = Umax / Ri, wobei Umax die maximale Fahrspannung und Ri der gemessene Wert sind, berechnet werden. 4 Mitteilungsblatt VSDM 3/99 Warum ist es wichtig den passenden Lokdekoder je nach notwendiger Motorenleistung auszuwählen? Der Lokdekoder muss den Lokmotor in jedem Betriebsfall mit Energie versorgen und damit auch den Motorstrom liefern. Dies führt auch im Lokdekoder zu einer Verlustleistung und damit Wärme. Wird nun der Motor belastet und der Motorenstrom ist während längerer Zeit (einige zehn Minuten) grösser als der zulässige Dekoderstrom kann dies je nach Kühlung des Lokdekoders zu einer thermischen Überlast und damit Ausfall führen wenn der Lokdekoder keinen internen thermischen Überlastschutz hat. Auch wenn kurzfristig (einige Zehntelsekunden) eine viel zu grosser (etwa 5 bis 10 fach der vom Dekoderhersteller spezifizierte Maximalwert) Motorstrom fliesst, kann dies zur sofortigen Zerstörung des Lokdekoders führen wenn dieser keine interne Überstrombegrenzung zumindest für den Motorausgang hat. Der Lokdekoder muss also mindestens den Motorenstrom im Überlastfall liefern können ohne selbst Schaden zu nehmen, er darf aber auch beliebig mehr liefern können. Natürlich ist ein leistungfähigerer Lokdekoder auch baulich grösser, so dass Sie im allgemeinen eher das notwendige Minimum wählen (müssen). Wie steuern Lokdekoder die Motorspannung und was ist hier bei Faulhabermotoren zu beachten? Faulhabermotoren sind eine spezielle Bauart bei welcher die interne Motorinduktivität viel kleiner ist als bei normalen Gleichstrommotoren. Dies führt zu einem besseren Motorverhalten bei Langsamfahrt (bzw. kleiner Motordrehzahl), da das Motorrastmoment über den Polen kleiner ist. Der Wert der Motorinduktivität ist bei reinem Gleichstrombetrieb nicht relevant, spielt aber bei der Art der Motorsteuerung durch Lokdekoder eine wichtige Rolle. Ein Lokdekoder steuert den Motor nicht mit einer Gleichspannung sondern im Pulsweitenbetrieb. Hierbei wird die Motorspannung dauernd ein- und ausgeschaltet mit einigen 100 Hertz bis einige Kilohertz Schaltfrequenz. Dabei bestimmt das Zeitverhältnis zwischen Ein- und Ausgeschaltet die mittlere Motorspannung bzw. Motorenstrom. Mitteilungsblatt VSDM 3/99 5 So wird im Dekoder viel weniger Verlustwärme erzeugt als bei einer linearen Spannungseinstellung und die Langsamfahreigenschaft bei allen Motoren wird verbessert da deren Motorrastmoment weniger Einfluss hat. Das Prinzip wird bei allen Lokdekodern angewandt. Bei diesem Betrieb gelten noch andere elektrische Einflüsse auf den Motorenstrom. Wegen der Motorinduktivität kann der Motorstrom nicht der schnell ein- und ausgeschalteten Motorspannung folgen, sondern steigt und sinkt mit einer durch den Wert der Induktivität bestimmten Geschwindigkeit. Da die Faulhabermotoren eine viel kleinere Induktivität haben muss der Lokdekoder eine angepasste höhere Schaltfrequenz für das Schalten der Motorspannung erzeugen, sonst kann ein Faulhabermotor nicht richtig in seiner Geschwindigkeit gesteuert werden und der Motor wird unnötig belastet oder überlastet. Das gleiche Verfahren der Impulsbreitensteuerung wenden auch einige analoge Fahrpulte mit speziell guten Langsamfahreigenschaften an. Auch da gelten die gleichen Anmerkungen für den Betrieb mit Faulhabermotoren. Weil alle Lokdekoder so arbeiten erreichen sie die besseren Langsamfahreigenschaften somit als Nebeneffekt, dies hat aber nichts direkt mit Digital zu tun. 6 Mitteilungsblatt VSDM 3/99