1 Skalarprodukt 2 Geraden
Werbung

1
Skalarprodukt
Für zwei Vektoren x = (x1 , x2 , . . . , xn ), y = (y1 , y2 , . . . , yn ) ∈ Rn wird das Skalarprodukt definiert als
< x, y >:=
n
X
xi yi
i=1
Eigenschaften:
< x, y >=
n
X
xi yi =
i=1
< λx, y >=
n
X
< x + x̂, y >=
n
X
yi xi =< y, x >
i=1
λxi yi = λ
i=1
n
X
n
X
xi yi = λ < x, y >
f ür λ ∈ R
i=1
λ(xi + x̂i )yi =
i=1
n
X
λxi yi +
i=1
Norm von x:
kxk :=
√
n
X
λx̂i yi =< x, y > + < x̂, y >
i=1
v
u n
uX
< x, x > = t
x2
i
i=1
Winkel zwischen x und y:
µ
^(x, y) := arccos
2
< x, y >
kxk kyk
¶
Geraden- und Ebenendarstellung
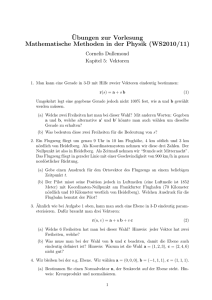
Sind a, b ∈ R2 , b 6= 0 zwei Vektoren, so heißt
G = Ga,b = {a + λb|λ ∈ R} = a + Rb
Parameterdarstellung der Gerade G. Hierbei ist a irgendein Punkt auf der Geraden G (hineinführender Vektor)
und b ist irgendein Richtungsvektor der Gerade (parallel zu G).
©
©©
6
©
©©
©©
©©
©
©
*
©
µ
¡
©
¡
©©
©
©
©© a¡©© b
©
¡©
©
©
¡
©
©©
-
G©©
©
©
©©
Neben der Parameterdarstellung gibt es noch die Gleichungsdarstellung
Hc,γ = {x ∈ R2 | < x, c >= γ}
mit γ ∈ R und 0 6= c ∈ R.
Umrechnungsformeln:
γc
Hc,γ = G <c,c>
,c⊥
Ga,b = Hb⊥ ,<b⊥ ,a>
Was heißt das? Wenn man a und b kennt, könnte man c und γ ausrechnen durch c = b⊥ und γ =< b⊥ , a >. Kennt
γc
man hingegen c und γ, so kann man a = <c,c>
und b = c⊥ setzen.
1
Begründung für die zweite Formel:
Pn
Für einen Punkt x = (x1 , x2 ) der Gerade haben wir xi = ai + λbi und < x, c >= i=1 xi ci = γ. Einsetzen liefert
n
X
ai ci + λbi ci = γ
i=1
n
X
ai ci + λ
i=1
Da wir für λ alle reellen Zahlen einsetzten dürfen und γ,
n
X
n
X
bi ci = γ
i=1
Pn
i=1
ai ci Konstanten sind, muss gelten
bi ci =< b, c >= 0
i=1
Also c = b⊥ , das heißt c steht senkrecht auf b. Und somit
Pn
i=1
ai ci =< a, c >=< a, b⊥ >=< b⊥ , a >= γ.
Bemerkung:
Die erste Formel wurde in der Vorlesung begründet. In obigen Rechnungen gilt immer n = 2.
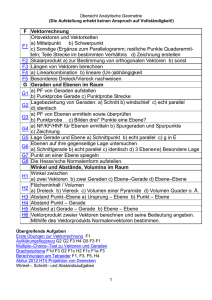
Normalenform (Hesse’sche Normalform):
Was haben c und γ für eine anschauliche Bedeutung? Der Vektor c steht senkrecht auf der Geraden. (Wenn man c auf
die Länge 1 normiert, nennt man ihn auch Normalenvektor.) Sei nun e ein beliebiger fester Punkt der Gerade G und
x ein beliebiger Punkt der Gerade.
6
©©
B ©©
©
©3́
AK
©´
A
©´
©´
A
©´
A
A ©©´
© ´
A
©
¡
µ ´
©
¡
A
©
© e ¡´´
x
Ac
©
´
©
¡
A
©
´
´
¡
A ©
©
©
©
G©©
©
©
©©
Der Vektor, der die Punkte A und B verbindet läßt sich darstellen als −e + x = x − e. Da dieser Vektor senkrecht auf
c steht, gilt
0 =< c, x − e >=< c, x > − < c, e >
Setzt man γ =< c, e > so gilt
< c, x >=< c, e >= γ
Unterschiedliche γ ergeben also Parallelverschiebungen der Geraden. Somit ist diese Darstellung wunderbar geeignet
dafür den Abstand zwischen einem Punkt x̂ und einer Gerade G = Hc,γ zu bestimmen. Es gilt:
distance(x̂, G) = d(x̂, G) =
| < c, x > −γ|
kck
Das Schöne an dieser Schreibweise ist, daß sie nicht nur im zweidimensionalen, sondern allgemein im Rn ihren Sinn
behält. Man denke sich zum Beispiel eine Ebene im dreidimensionalen Raum
E = {(x1 , x2 , x3 ) ∈ R3 |2x1 + 3x2 − 7x3 = 6} = {(x1 , x2 , x3 ) ∈ R3 | < x, (2, 3, −7) >= 6} = {x ∈ R3 | < c, x >= γ}
Hier ist c = (2, 3, −7) wieder ein Vektor, der senkrecht (diesmal) auf der Ebene E steht, und γ = 6. Die Abstandsformel
zwischen einem Punkt x̂ und einer Ebene E = Ec,γ ist analog zur Abstandsformel einer Geraden gegeben durch
distance(x̂, E) = d(x̂, E) =
2
| < c, x > −γ|
kck
3
Regressionsgerade
Hat man n Wertepaare (xi , yi ) (z.B. x : Futter am Tag in kg, y : Masse eines adulten Hasen in kg) gegeben und
vermutet einen linearen Zusammenhang y = ax + b (wer mehr futtert wird wohl auch mehr wiegen), so stellt sich die
Frage, wie man die Konstanten a und b wählt, so dass die Realität möglichst gut beschrieben wird. Eine Möglichkeit
ist, indem man die Datenpunkte in ein Koordinatensystem einträgt und nach Gefühl eine Gerade durchlegt,
Pndie in
1
der ”Nähe”
aller
Punkte
liegt.
Man
kann
die
Werte
aber
auch
ausrechnen.
Hierfür
definiert
man
x
=
i=1 xi ,
n
Pn
y = n1 i=1 yi (Mittelwert) und erhält
< x, y > −nxy
a :=
< x, x > −nxx
b := y − ax
4
Matrizen und lineare Gleichungssysteme
Eine m × n-Matrix ist ein rechteckiges Schema von Zahlen
a1,1 a1,2
a2,1 a2,2
A= .
..
..
.
am,1
am,2
...
...
..
.
a1,n
a2,n
..
.
...
am,n
mit ai,j ∈ R. Schreibweise: A = (ai,j ) i=1,...,m
j=1,...,n
Seien
x=
x1
x2
..
.
und b =
xn
b1
b2
..
.
bn
zwei weitere n × 1 Vektoren so kann man ein lineares Gleichungssystem abkürzen als
Ax = b
ausgeschrieben ist dies
a1,1 x1 + a1,2 x2 + · · · + a1,n xn
a2,1 x1 + a2,2 x2 + · · · + a2,n xn
..
.
=
am,1 x1 + am,2 x2 + · · · + am,n xn
b1
b2
..
.
bn
Zum Lösen des Gleichungssystems bringt man dieses auf Zeilenstufenform:
x1 + a1,2 x2 + a1,3 x3 + . . . + a1,r xr + . . . + a1,n xn = b1
x2 + a2,3 x3 + . . . + a2,r xr + . . . + a2,n xn = b2
..
.
xr + ar,r+1 xr+1 + . . . + ar,n xn = br
0 = br+1
..
.
0 = bm
Falls br+1 6= 0, br+2 6= 0, . . . oder bm 6= 0 so besitzt das Gleichungssystem keine Lösung. Für die Variablen
xr+1 , xr+2 , . . . , xn gibt es keine Bedingungen. Man nennt diese Variablen auch freie Variablen. Nun beginnt man
bei xr und drückt xr durch die freien Variablen aus. Dannach geht man Schritt für Schritt weiter nach oben und
berechnet in der i-ten Zeile xi , indem man für xi+1 , . . . , xr die schon berechneten Ausdrücke einsetzt und nach xi
auflöst. Am Ende hat man alle xi ’s durch die freien Variablen ausgedrückt, und kann die Lösungsmenge hinschreiben.
3