Praktikumsbericht_Da..
Werbung

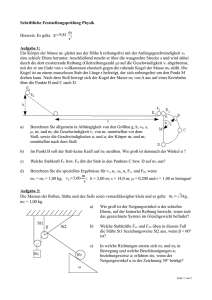
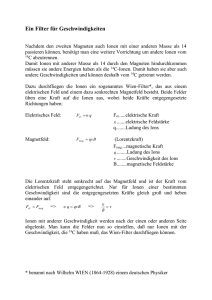
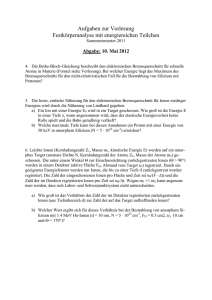
Das Boot eine Studie zum Ionenantrieb Max Klammer Christian Haase Jörg Schnitzbauer Paul Kühler Sebastian Mährlein Projektpraktikum 2007 Uni Konstanz 1 Inhaltsverzeichnis Inhaltsverzeichnis Inhaltsverzeichnis 1 Einleitung 3 2 Theorie 2.1 Beweglichkeit von Ionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2 Die Trajektorie der Ionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.3 Wirkungsgrad des Antriebs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 6 10 3 Messung und Auswertung 3.1 Boot 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1.2 Messung der Antriebskraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Boot 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.2 Messung der Antriebskraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2.3 Widerstand der Lösung in Abhängigkeit von ihrer Temperatur . . . . . . . . . . 3.2.4 Strom und Antriebskraft in Abhängigkeit von der Konzentration . . . . . . . . . 3.3 Bestimmung des Wirkungsgrades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3.1 Bestimmung des Reibungskoeffizienten des Bootes . . . . . . . . . . . . . . . . 3.3.2 Berechnung des Wirkungsgrades . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Messung des B-Feldes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5 Schwierigkeiten bei den Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 11 11 12 16 16 17 19 20 23 23 23 26 31 4 Fazit 31 5 Literaturverzeichnis 32 2 2 THEORIE 1 Einleitung Die Idee bei diesem Versuch ist es, einen alternativen Bootsantrieb zu entwerfen, welcher im Gegensatz zu konventionellen Elektroantrieben direkt die elektrische Energie dazu nutzt, das Wasser antiparallel zur Fahrtrichtung zu beschleunigen. Bei konventionellen Schiffsantrieben wird die elektrische Energie mittels eines Elektromotors in mechanische Arbeit umgesetzt. Diese wird über eine Antriebswelle auf eine Schiffsschraube übertragen, welche das Wasser entgegen der gewünschten Fahrtrichtung beschleunigt und somit nach dem dritten N EWTONschen Axiom eine Kraft auf das Schiff in Fahrtrichtung bewirkt. Unser Antrieb soll durch die Nutzung der L ORENTZkraft funktionieren, die auf im Wasser enthaltene Ladungen wirkt. (1) FL = q · V × B FL = Lorentzkraft, V = Geschwindigkeit der Ladung, B = magnetische Flussdichte. Man benötigt also Ladungsträger, auf die diese Kraft wirken kann und eine Konstruktion, die den Impulsübertrag zum Antrieb des Bootes nutzt. Der Versuch zu diesem Antrieb findet daher in Salzlösungen statt, da wir hier Ionen in wässriger Lösung vorliegen haben. Das Antriebskonzept wäre daher nicht in Binnengewässern, sondern nur in Meeren umsetzbar. Die Lorentzkraft wird nur auf bewegte Ladungen, und zwar senkrecht zu ihrer Bewegngsrichtung. Um die Ionen in der Lösung wie gewünscht zu bewegen, wollen wir einen Plattenkondesator benutzen, welcher vollständig in die Lösung eingetaucht ist. Die in der Salzlösung enthaltenen positiv und negativ geladene Ionen werden durch das elektrische Feld im Kondensator zunächst in zueinander entgegengestzter Richtung auf die Kondensatorplatten beschleunigt. Die Lorentzkraft wirkt dann auf Kationen und Anionen in die gleiche Richtung, da sowohl Ladung als auch Bewegungsrichtung bei beiden unterschiedlich ist und das Kreuzprodukt in Gl.(1) dann in die gleiche Richtung zeigt. Da der Betrag des Kreuzproduktes maximal wird, wenn die beteiligten Vektoren senkrecht aufeinander stehen, und die anfängliche Bewegungsrichtung der Ionen parallel zum E-Feld verläuft, sollten E-und B-Feldlinien also senkrecht aufeinander stehen. Auf beides wiederum senkrecht steht die Lorentzkraft, die für unseren Antrieb verantwortlich ist. Nach diesen Überlegungen entwarfen wir den Plan für unser erstes Boot: Das Feld des Plattenkondensators sollte senkrecht auf das magnetische Feld, beides senkrecht zur Bewegungsrichtung stehen. Alle von uns verwendeten Antriebe bestanden aus einem Plattenkondensator und einer geeigneten Anordnung von Permanentmagneten. 2 Theorie 2.1 Beweglichkeit von Ionen Die Ionenbeweglichkeit ist ein Begriff, welcher aus der Elektrochemie stammt. Sie ist als die Geschwindigkeit definiert, mit welcher sich in Wasser (25◦ C) gelösten Ionen bewegen, wenn auf sie ein elektrisches Volt = 1 Vm ) mit der Stärke E = 1 Vm wirkt. Die Beweglichkeit der Ionen hängt Feld E (SI-Einheit [E] = 1 Meter im Wesentlichen von ihrer Größe, ihrer Ladung und von der speziellen Ausbildung der Hydrathülle ab. Die polaren Wassermoleküle lagern sich nämlich radial um die Ionen an. An den positiv geladen Kationen lagert sich der negativ polare Sauerstoff des Wassers an, an den negativ geladen Anionen der positiv polare Waserstoff. Hier sind einige der wichtigsten Beispiele der Ionenbeweglichkeit für anorganischen Ionen. 3 2.1 Beweglichkeit von Ionen Kation H+ Li+ Na+ K+ Ag+ NH4+ Zn2+ Fe2+ La3+ V E [m2/sV ] 36, 23 · 10−8 4, 01 · 10−8 5, 19 · 10−8 7, 62 · 10−8 6, 24 · 10−8 7, 63 · 10−8 5, 47 · 10−8 4, 8 · 10−8 5, 7 · 10−8 Anion OH − F− Cl − Br− I− NO− 3 MnO− 4 SO2− 4 CO2− 3 2 THEORIE V E [m2/sV ] 20, 64 · 10−8 5, 70 · 10−8 7, 91 · 10−8 8, 09 · 10−8 7, 96 · 10−8 7, 40 · 10−8 5, 6 · 10−8 8, 29 · 10−8 7, 46 · 10−8 Aufgeführt sind hier auch die beiden Ionenpaare, welche wir in unserem Versuch verwendet haben. Das ist einmal NaCl und KNO3 . Wobei die auftretenden Unterschiede der Ionenbeweglichkeiten sehr gering sind. Die sehr hohe Beweglichkeit der H+ (Säure-aktiv) und der OH− (Laugen-aktiv) Ionen hängt damit zusammen, dass die Beweglichkeit der Ionen über den Widerstand der Lösung bestimmt wird. Wenn man von Beweglichkeit der Ionen spricht, ist damit gemeint, dass die Ladung fest an die Ionen gebunden ist und somit der elektrische Strom durch die Lösung nur durch Massentransport fließen kann. Dies stimmt allerdings bei Säuren und Basen nicht. H3 O+ und OH − umgeben sich auch mit einer Hydrathülle, wobei die Wassermoleküle mit Wasserstoffbrücken and die Ionen gebunden sind. Diese Wasserstoffbrücken können nun „umklappen“ und man hat daher in einer sauren Lösung eine Art „Lochleitung“ und in basischer Lösung einen echten Ladungstransport. Für unseren Bootsantrieb brauchen wir zwar eine hohe Beweglichkeit der Ionen (siehe unten), aber ebenso wichtig ist ein echter Massentransport in der Lösung. Daher kommen für unser Experiment saure und basische Lösungen nicht in Frage. Abbildung 1: Leitung in saurer und basischer Loesung 4 2.1 Beweglichkeit von Ionen 2 THEORIE Abbildung 2: Messung zur Leitfähigkeit einer Lösung Im direkten Zusammenhang zur Ionenbeweglichkeit steht die Leitfähigkeit einer Ionenlösung. Die Leifähigkeit ist für uns von Interesse, da wir bei einer höheren Leitfähigkeit der Lösung auch höhere Ströme vorliegen haben und nach P = U · I haben wir dann einen hohen Energieaufwand. Im Folgenden seien die Zusammenhänge zwischen der Beweglichkeit der Ionen und der elektrischen Leitfähigkeit einer Ionenlösung betrachtet. Die elektrische Leitfähigkeit χ ist gleich definiert wie bei metallischen Leitern und ergibt sich aus dem Kehrwert des Widerstandes χ = R1 . Der Widerstand ist gegeben durch: R= U . I Der Widerstand hängt weitestgehend von der Ionenkonzentration, der Ladungszahl der Ionen, den geometrischen Abmaßen des Messaufbaus und der Beweglichkeit der Ionen ab. Bei der Leitfähigkeit von gelösten Ionen unterscheidet man starke und schwache Elektrolyte. Ob ein Elektrolyt stark oder schwach ist, hängt vom Dissozistionsgrad des Stoffes ab. Essigsäure (schwache Säure) dissoziiert zum Beispiel nicht vollständig und man muss daher über das Massenwirkungsgesetz auf die effektive Ionenkonzentration zurückschließen. Die von uns verwendeten Salze (NaCl, KNO3 ) dissoziieren aber vollständig, und die Lösungen dieser Salze gehören somit zu den starken Elektrolyten. Auch die Ladung der Ionen spielt eine Rolle. Höher geladene Ionen haben eine größere Hydrathülle, was bei eine effektiven Volumensvergrößerung bewirkt. Dies widerum erhöht sowohl die bei einer Krafteinwirkung zu beschleunigende Masse als auch die Reibung. Da sich die Massenerhöhung proportional zum Volumen, also r3 , die Reibungsänderung bei S TOKEscher Reibung proportional zur von der Bewegungsrichtung aus gesehenen Querschnittsfläche, also r2 . Wir betrachten im folgenden einen 1-1 wertigen, starken Elektrolyten. Das sind die Eigenschaften der von uns verwendeten Salze. 1-1 wertig bedeutet, dass Kationen und Anionen beide einfach geladen sind. Es gilt also für die molaren Konzentrationen c+ = c− = c. Wenn man nun davon ausgeht, dass man ein zylindrisches Gefäß mit der Qerschnittsfläche A vorliegen hat, passieren in der Zeit t NA cV+ At Kationen und NA cV− At 5 2.2 Die Trajektorie der Ionen 2 THEORIE Anionen die Querschnittsfläche A. mit NA = Avogadrokonstante V+/− Geschwindigkeit der Kationen/Anionen. Mit der Elementarladung e ergibt sich der gesamt fließende Strom zu: I = eNA c+V+ A + eNAc−V− A. Unter Verwendung der Faradaykonstante F = NA e, c+ = c− = c und der Ionenbeweglichkeit u+/− := V+/− E ergibt sich: I = FcAE(u+ + u− ). Im Wesentlichen interessiert uns aber die elektrische Leitfähigkeit χ χ= I = cF(u+ + u− ). AE Wir sehen also an dieser Stelle, dass die Leitfähigkeit des Elektrolyten nur von der Ionenbeweglichkeit und von der Konzentration der Lösung abhängt. Um nun die Leitfähigkeit auf die einzelnen Stoffe zu spezifizieren, werden hier die Ionenäquivalenzleitfähigkeiten Λ+/− = Fu+/− und die Äquivalenzleitfähigkeit Λ := Λ+ + Λ− eingeführt. χ := cΛ = c(Λ+ + Λ− ). Die elektrische Leitfähigkeit in Abhängigkeit von der Konzentration verhält sich bei jedem Elektrolyten unterschiedlich, es liegt aber immer ein Maximum vor. Es ist also nicht möglich durch Erhöhen der Konzentration die Leitfähigkeit beliebig zu verbessern. Es gibt nämlich einen gegenläufigen Effekt, da die Ionenbeweglichkeit und somit die Äquivalenzleitfähigkeit mit steigender Konzentration fällt. Das hängt damit zusammen, dass die Ionen bei sehr hohen Konzentrationen auch in der Lösung wechselwirken. Der Abstand zwischen den Ionen ist so gering, dass die Coulombkräfte zwischen den verschiedenen Ionen dazu führen, dass sich „Ionenwolken“ ausbilden. Diese Ionenwolken vermindern die Beweglichkeit der einzelnen Ionen stark. Man führt daher eine stoffspezifische Konstante Λ∞ ein, welche die Äquivalenzleitfähigkeit bei unendlich großer Verdünnung ist. KOHLRAUSCH fand ein empirisches Gesetz, welches die Konzentrationsabhängigkeit der Äquivalenzleitfähigkeit ausdrückt: √ Λ = Λ∞ − k c k ist hier eine empirisch zu bestimmende stoffspezifische Konstant, welche im wesentlichen von der Ladung der Ionen abhängt. Ist die Ladung der Ionen größer, so nimmt auch die Coulombwechselwirkung mit steigender Konzentration stärker zu. Allerdings gilt das KOHLRAUSCHsche Quadratwurzelgesetz nur für geringe Konzentrationen (c < 10−2 mol l ). 2.2 Die Trajektorie der Ionen Im folgenden wird ein stark vereinfachtes Modell der Ionenbewegung in unserem Versuch betrachtet. Wir gehen aus von einem homogenen B-Feld in z-Richtung und einem homogenen E-Feld in x-Richtung. In 6 2.2 Die Trajektorie der Ionen 2 THEORIE Abbildung 3: Darstellung der Leitfähigkeit eines Elektrolyten Wirklichkeit sind unsere E und B Felder sehr inhomogen. Aber man kann trotzdem qualitativ beobachten, dass eine Strömung entsteht, und der theoretische Zusammenhang gibt uns Anhaltspunkte zur Verbesserung des gesamten Systems. ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ qE 0 E B = ⎝ 0 ⎠ , E = ⎝ 0 ⎠ , Fel = ⎝ 0 ⎠ . 0 B 0 Die magnetische Kraft FL (Lorentzkraft) ergibt aus dem Kreuzprodukt der Geschwindigkeit der Ladungen und dem Magnetfeld. ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ẋ 0̇ ẏB FL = q ⎝ ẏ ⎠ × ⎝ 0̇ ⎠ = q ⎝ −ẋB ⎠ . ż Ḃ 0 Um nun die Bewegungsgleichung aufstellen zu können, gehen wir von einer Reibungskraft aus, welche proportional zur Geschwindigkeit der Ladungen ist. Dies ist auch sinnvoll, da man bei S TOKEscher Reibung von kleinen langsamen Teilchen ausgeht. Wichtig ist auch noch, das die Teilchengröße deutlich höher ist als die mittlere freie Weglänge, was bei hydratisierten Ionen jedoch der Fall ist. ⎛ ⎞ ẋ Fr = −γ ⎝ ẏ ⎠ . ż Also lautet unsere Bewegungsgleichung der Ionen: ¨ Fel + FL + Fr = mx. Nun erhalten wir bei Betrachtung der einzelnen Komponenten der Vektoren ein Gleichungssystem, welches wie folgt aussieht: 7 2.2 Die Trajektorie der Ionen 2 THEORIE y E-Feld B-Feld z x Abbildung 4: Die Richtungen der Felder qB qE γ ẋ − ẏ = , m m m qB γ ÿ + ẏ + ẋ = 0, m m γ z̈ + ż = 0. m ẍ + Die letzte Zeile des Differentialgleichungssystem ist bereits entkoppelt und es kann daher die Lösung für z(t) für sich betrachtet werden. Wir gehen davon aus, dass die Ionen sich zum Zeitpunkt t = 0 in Ruhe befinden ⇒ ż(t = 0) = 0. Daraus folgt, da wir keine in z-Richtung wirkende Kraft haben, wodurch die z-Komponente der Beschleunigung z̈(t) = 0 ergibt. Also wissen wir: z(t) = const. = z0 . Um das verbleibende gekoppelte Differentialgleichungsystem für x und y leichter Lösen zu können, führen wir ein paar vereinfachende Definitionen ein ẋ := u, ẏ := v, β := γ , m ω := qB m Daraus ergibt sich das vereinfachte System qE m v̇ + β v + ω u = 0 u̇ + β u − ω v = Das homogene Problem lässt sich nun in einer Koeffizientenmatrix A zusammenfassen: u u̇ −β ω = −ω −β v v̇ 8 (2) (3) 2.2 Die Trajektorie der Ionen 2 THEORIE Zum Bestimmen der Eigenwerte der Matrix A bestimmen wir nun noch die Determinate von A − λ I: det(A − λ I) = λ 2 + 2β λ + β 2 + ω 2 = 0, λ+/− = −β ± iω . Durch Einsetzen gelangt man zu den zugehörigen Eigenvektoren 1 + , d = i − d = i 1 . Also lautet die Lösung des homogenen Problems: 1 i u e(−β +iω )t + c− e(−β −iω )t . = c+ i 1 v Nun benötigen wir noch eine partikuläre Lösung des Differentialgleichungssystems. Aufgrund der einfachen Bauart der DGL kann man eine Lösung raten. Der Ansatz f part =k, also ein konstanter Vektor, führt zu folgender Lösung: qE β f part = . m(β 2 + ω 2 ) −ω Also lautet die Lösung der DGL: qE β 1 i u + (−β +iω )t − (−β −iω )t +c + e e . =c i 1 v m(β 2 + ω 2 ) −ω Als Trajektorie der Ladungen ist eine reellwertige Funktion zu erwarten. Diese erhält man, indem man Linearkombinationen der beiden Lösungsfunktionen bildet, und zwar so, dass die Linearkombinationen gerade reellwertige Funktionen ergeben. Bei den hier auftauchenden e-Funktionen führt uns das auf trigonometrische Funktionen (Euler-Identität). Ein weiterer notwendiger Schritt ist, dass man die obige Substition wieder rückgängig macht, um die Lösungen für x und y zu erhalten. Nach einigen Rechenschritten erhält man so: −β t e qEt x0 β − cos(ω t) sin(ω t) x + c + + c . = 3 4 y0 sin(ω t) cos(ω t) y m(β + ω 4 ) −ω β 2 + ω2 An der Lösung dieses Problems kann man nun ablesen, dass die Teilchen Anfangs in Schwingungen geraten, welche aber aufgrund der e-Funktion in der Zeit abklingen. Übrig bleibt dann nur noch die partikuläre Lösung. Man kann hier annehmen, dass die Oszillationen relativ schnell abklingen, da die innere Reibung der Ionen erheblich ist. Wir können also annehmen, dass die Terme qEt ·β, m(β 2 + ω 2 ) qEt · ω, y = − m(β 2 + ω 2 ) x = 9 2.3 Wirkungsgrad des Antriebs 2 THEORIE für die Bewegung der Ionen entscheidend sind. Um die Abhängigkeit der Zusammenhänge besser erkennen zu können, setzen wir wieder die Größen β = mγ , ω = qB m qE γ · t, γ 2 + q2 B2 q2 EB · t. y = − 2 γ + q2 B2 x = (4) (5) Wir wollen in y-Richtung die größte Geschwindigkeit der Ionen erreichen, da dann der Impulsübertrag antiparallel zur gewünschten Fahrtrichtung des Bootes maximimal ist. Die Geschwindigkeit in xRichtung sollte hingegen minimiert werden, da die Impulsänderung in dieser Richtung einen Energieverlust für unser System bedeutet. Die Grenzgeschwindigkeit der Ionen sieht wie folgt aus: qE γ ẋ . = 2 ẏ γ + q2 B2 −qB An dieser Stelle ergibt sich das Problem, dass alle Variablen, welche man zur Verfügung hat, um das System zu variieren, im Vorfaktor auftauchen. Es ist also nicht möglich nur eine der Größen (ẋ, ẏ) zu verändern. Trotzdem ist es sinnvoll, die partiellen Ableitungen der Funktion |ẏẋ | zu betrachten, um ein Maximum dieses Verhältnisses zu finden. ẏ qB = . ẋ γ Nach dem hier gewonnenen Zusammanhang sollte man das B-Feld wie die Ladung der Ionen möglichst groß wählen und die Reibung der Ionen in der Lösung sollte gering sein, um die Effizienz des Bootes zu steigern. Intuitiv würde man demnach eine Lösung mit einer hohen Ionenbeweglichkeit wählen. Wie man im vorherigen Abschnitt gesehen hat, ist die Ionenbeweglichkeit höher, wenn die Konzentration der Salzlösung geringer ist. Also ist eine hohe Konzentration nicht unbedingt von Vorteil. Wenn man aber nun den untersuchen will, muss man aber auch berücksichtigen, dass bei sehr hohen Konzentrationen die Leitfähigkeit wieder abnimmt. Im Bereich der Auswertung werden diese Zusammenhänge noch näher untersucht. 2.3 Wirkungsgrad des Antriebs Um die verschiedenen Messreihen besser untereinander vergleichen zu können, suchten wir eine Möglichkeit, aus den Messwerten einen Wirkungsgrad zu berechnen. Die Leistung, welche wir in das System hineinstecken ist einfach zu bestimmen: Pel = U · I. Wir haben Messwerte für Spannung U und Strom I vorliegen. Das Problem ist nur einen Zugang zu der mechanischen Leistung des Bootes zu finden. Es gilt aber für die Leistung: s W = F · = F ·V. P= t t 10 3 MESSUNG UND AUSWERTUNG Mit der Geschwindigkeit V und der Kraft F. Als Problem stellt sich nur, dass es nicht möglich ist die Geschwindigkeit selber zu messen. Messtechnisch zugänglich ist nur die Antriebskraft (siehe oben) und die Reibungskraft unseres Bootes in Abhängigkeit von der Geschwindigkeit in der Form: Fr = μ ·V. Wenn man den Reibungskoeffizienten μ vorliegen hat, kann man auf die maximale Geschwindigkeit des Bootes schließen, wenn man davon ausgeht, dass sich ein Kräftegleichgewicht zwischen der Antreibendenund der Reibungskraft einstellt. Fantr. = Fr = μ ·Vmax Fantr. ⇒ Vmax = . μ So können wir auch auf die mechanische Leistung Pmech des Bootes zurückschließen: Pmech = Fantr. ·Vmax = 2 Fantr. . μ 3 Messung und Auswertung 3.1 Boot 1 3.1.1 Aufbau Den ersten Antrieb haben wir mit insgesamt 6 Permanentmagneten und einem Kondensator aus Aluminiumplatten aufgebaut. Zu Beginn hatten wir die Idee, das Boot wirklich fahren zu lassen, nur hatten wir dabei das Problem, dass die Verbindungskabel für den Kondensator so starr sind, dass man praktisch keine unbeinflussten Messwerte der Geschwindigkeit erhalten kann. Die nächste Idee war, den Antrieb alleine ohne Autriebskörper an einer Seilbahn zu befestigen, aber auch hier sind wir zu dem Schluss gekommen, dass die Reibung nicht vernachlässigbar ist. Abbildung 5: Unser erstes Boot 11 3.1 Boot 1 3 MESSUNG UND AUSWERTUNG 3.1.2 Messung der Antriebskraft Die ersten Messversuche haben wir mit einer gesättigten NaCl Lösung unternommen, wobei das Ziel war, zu beobachten, ob es überhaupt zu einer Strömung (Massenbeschleunigung) in der Lösung kommt. Ohne eine sichtbare Strömung wäre es unmöglich, eine Messung der antreibenden Kraft oder der Geschwindigkeit des Bootes zu machen. Wir setzten das Boot in einen kleinen Plastikbehälter und beschwerten es mit Gewichten. Zu unserer Zufriedenheit konnten wir bereits bei einer Spannung von 5V und einem Strom von 4, 1A eine geringe Strömung in der NaCl Lösung erkennen. Nun erhöhten wir die Spannung immer weiter, wobei sich gemäß der Erwartung die Strömung mit steigender Spannung verstärkte. Der höchste Wert für Spannung und Strom waren 10V und 24A. Die Strömung war bei diesen Werten schon sehr deutlich. Wir konnten aber an dieser Stelle schon abschätzen, dass der Wirkungsgrad sehr schlecht ist, da man hier schon eine elektrische Leistung von P = U · I = 240W in das System hineinsteckt. Nach diesen ersten Beobachtungen überlegten wir, wie man an diesem funktionierenden Aufhängung Boot Faden Gewichte Wanne Mohrsche Waage Abbildung 6: Aufbau zur Messung mit der Mohrschen Waage Antrieb sinnvolle Leistungsmessungen vornehmen könnte. Die erste Idee war eine Antriebskraftmessung durch Benutzung einer M OHRschen Waage (s. Abb. 3.1.2). Der freie Arm der Waage sollte über eine Umlenkrolle mit dem frei schwimmenden Boot verbunden sein und durch die Antriebskraft des Bootes ausgelenkt werden. Diese Messart scheiterte jedoch an den zu großen Trägheitsmomenten und Reibung der zur Verfügung stehenden Umlenkrolle. Die zweite Idee war, mittels eines physikalischen Pendels auf die Antriebskraft zurückzuschließen(s. Abb. 3.2.1). Dies sollte so gut funktionieren, dass wir diese Methode bis zum Schluss beibehalten würden. Um die messbaren Kräfte zu erhöhen, erschien es uns am sinnvollsten ein Salz zu verwenden, welches bei Raumtemperatur eine möglichst hohe Löslichkeit aufweist. Des Weiteren sollten sich die Kationen und die Anionen möglichst in ihren physikalischen Eigenschaften (Masse m, Volumen v, Ladungszahl Z) gleich sein, um eine möglichst gute Symmetrie bei den Kräften auf die Anionen und die Kationen zu erreichen. Ein weiteres wichtiges Kriterium war, dass bei der Elektrolyse möglichst keine gefährlichen Stoffe entstehen sollten. Aus diesem Grund kam NaCl für Dauerexperimente nicht in Frage, da bei seiner Elektrolyse gasförmiges Chlor und Wasserstoff entstehen. Kaliumnitrat hingegen (KNO3 ) ist für unsere 12 3.1 Boot 1 3 MESSUNG UND AUSWERTUNG Sperrholz Stromkabel Styropor 6 cm Elektroden 10 cm 5 cm Magnete Abbildung 7: Boot 1 in schematischer Darstellung Anforderungen gut geeignet. Es hat eine hohe Löslichkeit in Wasser von 316gl bei 20◦C. Wenn wir Messungen mit dem Antrieb vornehmen, verbrauchen wir doch einige Ionen, wenn man bedenkt, dass wir maximale Ströme von 25A vorliegen haben. Wir haben eine Überschlagsrechnung durchgeführt, um die Änderung der Ionenkonzentration abzuschätzen: g . Also ergibt Wir haben in 3l Lösung etwa 1kg Salz gelöst. KNO3 hat eine molare Masse von 101, 1mol sich für die Teilchenanzahl n in der gesamten Lösung: n=2 1000g 24 g ≈ 20mol ≈ 12 · 10 Teilchen. 101, 1 mol Über den Strom ergibt sich der Ladungsverbrauch: Imax = 25A = 25 e . −19 1, 6 · 10 s Dies entspricht bei einfach geladenen Ionen einer Abnahme der Ionenkonzentration von ≈ 0, 013 s . Diese Änderung der Ionenkonzentration können wir bei kurzen Messungen vernachlässigen. 13 3.1 Boot 1 3 MESSUNG UND AUSWERTUNG s l SK S a Abbildung 8: Aufbau zur Messung mit dem Pendel. S: Schwerpunkt des Systems, SK : Schwerpunkt der Kabel, s: Abstand des Aufhängepunkts zu SK . Um das rücktreibende Drehmoment des physikalischen Pendels zu bestimmen, brauchen wir das Volumen des Bootes, da wir die effektive Masse benötigen, welche sich als die Masse des Bootes vermindert um die Masse der verdrängten Lösung ergibt. me f f . = mB − mLsg = mB −VB · ρLsg . Wobei ρLsg die Dichte der Lösung ist. Das gemessene Volumen des Bootes ist VB = (0, 206 ± 0, 002)l und die Messung zur Dichte der Lösung ergab ρLsg = (1, 135 ± 0, 005) kgl . Die Masse des Bootes beträgt (135, 72 ± 0, 05)g. Um die Kabel zu strecken an denen das Boot aufgehängt war, beschwerten wir das Boot zusätzlich mit einem Aluminium-Block, welcher sich nicht in der Lösung befand. Die Masse dieses Zusatzgewichtes ist mA (134, 78 ± 0, 05)g. Da die Kabel eine nicht vernachlässigbare Masse haben, müssen wir mit einem physikalischen Pendel rechnen. Dazu haben wir die Längendichte ρL der beiden Kabel bestimmt. g g ρLg = (0, 219 ± 0, 005) cm g ist die Längendichte des gelben Kabel, ρLs = (0, 244 ± 0, 005) cm s die des schwarzen Kabels. Aus diesen Längendichten der Kabel lässt sich nun die Masse der Kabel berechnen: mK = l · (ρLg + ρLs ). Dabei ist l die Länge der Kabel, also auch die Pendellänge. Um nun das rückstellende Drehmoment des Pendels zu berechnen, braucht man noch den Schwerpunkt s (gemessen von der Aufhängung) des 14 3.1 Boot 1 3 MESSUNG UND AUSWERTUNG Abbildung 9: links: Das Boot in der Wanne mit Kaliumnitratlösung. Zu sehen sind auch die Kabel als Pendelaufhängung. rechts: Strömung, die sich am Eingang des Bootes gebildet hat. Pendels. Dazu bestimmen wir den Abstand sK des Schwerpunkts SK zum Aufhängepunkt der Kabel: l sK = . 2 Der Schwerpunkt des Bootes befindet sich im Abstand l von der Aufhängung. Also ergibt sich für den Schwerpunkt des ganzen Pendels: mK · sK + me f f · l . s= mK + me f f Die Masse mtotal ist die gesamte Masse des Pendels: mtotal = me f f + mA + mK Das rückstellende Drehmoment D ergibt sich durch: D = mtotal · g · s sin(φ ). mit sin(φ ) = al . Die rücktreibende Kraft ist demnach: F= mtotal · g · s · a . l2 mtotal ist die Masse des gesamten Bootes und die Masse der Kabel. a[mm] 5 10 15 20 23 a[m] 0,005 0,010 0,015 0,020 0,023 δ a[m] 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 F[N] 2,36E-03 4,71E-03 7,07E-03 9,43E-03 1,08E-02 δ F[N] U[V ] 1,01E-03 6 1,79E-03 9,5 2,56E-03 13 3,33E-03 15 3,80E-03 17 15 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG Aus den geschätzten Fehler der Messung ergeben sich nach den Gesetzen der Fehlerforpflanzung die Folgefehler. Sei f (xi ) eine Funktion von fehlerbehafteten Variablen xi , so gilt für den Fehler des Wertes von f : ∂ f δ xi δ f = ∑ i ∂ xi Der Fehler für die rücktreibende Kraft F ergibt sich somit zu: gsa m ga m gs 2mtotal gsa total total ·δl δ F = 2 · δ mtotal + ·δs+ ·δa+ l l2 l2 l3 3.2 Boot 2 3.2.1 Aufbau Wie man oben in der Theorie gesehen hat, erhält man eine bessere Effizienz des Antriebes, wenn man das Magnetfeld möglichst groß wählt. Außerdem sollte das Magnetfeld möglichst homogen sein, um unerwünschte Ablenkungen und Wirbel zu vermeiden. Wir haben uns daher dazu entschlossen einen zweiten Antrieb zu bauen, bei welchem wir die Packdichte der Magneten stark erhöht haben. Abbildung 10: Unser zweites Boot 16 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG 6 cm 10 cm 5 cm Abbildung 11: Boot 2 in schematischer Darstellung 3.2.2 Messung der Antriebskraft Wir haben mit diesem Boot die Messung zur Kraft des Antriebes wiederholt. Der Versuchsaufbau ist der gleiche geblieben, nur die Masse und das Volumen des Bootes haben sich verändert. Ansonsten ist die Auswertung dieselbe geblieben. Das Volumen des Bootes beträgt VB = (0, 132 ± 0, 002)l, die Masse des zweiten Bootes mB = (0, 305 ± 0, 005)kg. Die Auswertung dieser Messreihe ergab: a[mm] 10 13 15 3 6 17 a[m] 0,01 0,013 0,015 0,003 0,006 0,017 δ a[m] 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 F[N] 1,24E-02 1,61E-02 1,86E-02 3,72E-03 7,44E-03 2,11E-02 δ F[N] 1,35E-03 1,57E-03 1,72E-03 8,39E-04 1,06E-03 1,86E-03 17 U[V ] 7 9,35 10,89 2,67 4,55 10,86 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG Uns hat auch interessiert, im Zusammenhang mit der Verwirklichung eines solchen Antriebes, wie sich die Kräfte verhalten, wenn man mit einer 3, 5% NaCl-Lösung arbeitet. Dies ist die Konzentration, welche etwa in den Meeren vorliegt. Diese Messung ergab: a[mm] 1 1,5 2 3 3 4 4 a[m] 0,001 0,0015 0,002 0,003 0,003 0,004 0,004 δ a[m] 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 5,00E-04 F[N] 1,35E-03 2,03E-03 2,70E-03 4,05E-03 4,05E-03 5,40E-03 5,40E-03 δ F[N] U[V ] 7,41E-04 2,77 7,74E-04 4,4 8,06E-04 8,8 8,72E-04 12,7 8,72E-04 13,8 9,38E-04 14,3 9,38E-04 15,9 Bei dieser Messung war noch zu beachten, dass die Dichte der verwendeten Lösung deutlich geringer ist als die einer gesättigten Kaliumnitrat-Lösung. Die Dichte der neuen Lösung beträgt ρMeer = 1, 035 kgl . 18 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG 3.2.3 Widerstand der Lösung in Abhängigkeit von ihrer Temperatur Da sich die Lösung während unserer Versuche erwärmte interessierte uns der Zusammenhang zwischen Widerstand der Lösung von ihrer Temperatur. Dazu kühlten wir die Lösung zunächst mit Trockeneis ab und maßen dann mit dem Stromfluss durch unser Boot bei konstanter Spannung die Änderung des Widerstands der sich bis auf Zimmertemperatur erwärmenden Lösung. Wir erhielten folgende Messergebnisse: t [s] 0 15 30 45 60 75 90 105 120 135 150 165 180 195 210 225 240 255 270 285 300 315 T [◦C] 13.5 14.0 14.2 14.4 14.7 14.9 15.6 15.7 15.7 16.0 16.1 16.3 16.6 16.9 17.1 17.2 17.6 18.2 17.2 17.2 17.5 17.4 I[A] 8.00 8.30 8.50 8.70 8.80 8.90 9.00 9.00 9.30 9.40 9.40 9.37 9.45 9.50 9.56 9.60 9.62 9.63 9.64 9.68 9.70 9.74 R0 R 1.000 0.964 0.941 0.920 0.909 0.899 0.889 0.889 0.860 0.851 0.851 0.854 0.847 0.842 0.837 0.833 0.832 0.831 0.830 0.826 0.825 0.821 330 345 360 375 390 405 420 450 480 510 540 570 600 630 660 690 720 750 780 810 840 870 17.9 18.0 18.2 18.4 18.6 18.6 18.6 18.8 19.4 20.0 20.3 20.3 20.9 21.4 21.9 22.4 23.1 23.7 24.0 24.4 24.8 25.2 9.77 9.80 9.83 9.86 9.89 9.92 9.95 9.96 9.99 10.03 10.06 10.14 10.17 10.24 10.32 10.37 10.43 10.48 10.54 10.58 10.63 10.70 0.819 0.816 0.814 0.811 0.809 0.806 0.804 0.803 0.801 0.798 0.795 0.789 0.787 0.781 0.775 0.771 0.767 0.763 0.759 0.756 0.753 0.748 Man sieht eine deutliche Abnahme der Leitfähigkeit mit dem Absinken der Temperatur. Dieser Effekt klingt jedoch schnell ab und ist in den Temperaturbereichen, in denen sich unsere Lösung während unserer Messungen bewegte, akzeptabel: zwischen 20◦C und 25◦C nimmt die Leitfähigkeit nur noch um 5% ab. 19 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG 1 0.95 R/R 0 0.9 0.85 0.8 0.75 0.7 12 14 16 18 20 22 24 26 T[°C] Abbildung 12: Widerstand in Abhängigkeit von der Temperatur der Lösung 3.2.4 Strom und Antriebskraft in Abhängigkeit von der Konzentration Der Einfluss der Konzentration der Ionen in dem Medium, in dem der Antrieb verwendet wird, wurde in der Theorie bereits diskutiert. Wir wollten untersuchen, ob in einer Salzlösung bei sehr hohen Ionenkonzentrationen tatsächlich eine Verschlechterung der Leitfähigkeit zu beobachten ist und wie sich dies auf die von unserem Antrieb erzeugte Schubkraft auswirkt. Dazu begannen wir unsere Messungen in einem Bad ohne Salz und erhöhten zwischen den Messungen des Stroms und der Auslenkung des Pendels bei gleichbleibender Spannung die Ionenkonzentration in Lösung durch Zugabe von NaCl. Wir führten die Messung fort, bis sich das zugegebene Salz nicht mehr vollständig löste, was bei 240g/l der Fall war. Damit gelangten wir allerdings nur bis zu 2/3 des Literaturwertes der Löslichkeitsgrenze von NaCl von 359 g/l bei 25◦C. Die Ursache dessen ist uns unklar. Vielleicht hätte man das Bad beim Auflösen des Salzes vorrübergehend aufwärmen müssen, was aber zu lange gedauert hätte. 20 3.2 Boot 2 Konzentration [ gl ] 0 2 6 10 14 20 40 50 60 60 70 80 90 100 110 120 130 140 160 180 200 220 240 3 MESSUNG UND AUSWERTUNG Spannung [V ] 10.00 10.02 10.00 9.99 9.99 9.98 10.05 10.04 10.00 10.00 9.96 9.96 10.05 10.08 10.03 10.04 10.03 10.02 9.96 10.02 10.08 10.10 10.05 Strom [A] 0.013 0.412 0.892 1.130 1.130 1.440 2.110 2.600 3.300 3.300 3.600 7.100 8.300 9.200 10.010 10.000 10.420 10.910 11.640 12.310 12.910 13.330 13.680 21 R [Ω] 769.231 24.320 11.211 8.841 8.841 6.931 4.763 3.862 3.030 3.030 2.767 1.403 1.211 1.096 1.002 1.004 0.963 0.918 0.856 0.814 0.781 0.758 0.735 Ausschlag [10−3 m] 0.0 0.0 0.5 1.5 2.0 2.5 3.0 4.0 5.0 5.0 6.0 7.0 8.0 8.0 8.0 9.0 10.0 10.0 11.0 11.0 12.0 11.0 9.0 Kraft [10−3 N] 0.00 0.00 0.68 2.03 2.70 3.38 4.05 5.40 6.75 6.75 8.10 9.45 10.80 10.80 10.80 12.15 13.50 13.50 14.85 14.85 16.20 14.85 12.15 3.2 Boot 2 3 MESSUNG UND AUSWERTUNG 12 20 10 15 6 10 4 5 2 0 0 50 100 150 200 c[g/l] Abbildung 13: Widerstand in Abhängigkeit von der Temperatur der Lösung 22 0 250 F[mN] R [Ohm] 8 3.3 Bestimmung des Wirkungsgrades 3 MESSUNG UND AUSWERTUNG 3.3 Bestimmung des Wirkungsgrades 3.3.1 Bestimmung des Reibungskoeffizienten des Bootes Nun hängt der Wirkungsgrad stark von dem Reibungskoeffizienten ab. Wir haben für die Messung der Reibung den Antrieb mit Styropor-Schwimmkörpern versehen. Der Messaufbau besteht aus einem Wasserbecken, in welchem sich das Boot befindet. An dem Boot ist ein Faden befestigt, an welchem über eine Umlenkrolle ein kleines Gewicht hängt und das Boot mit konstanter Kraft beschleunigt. Die Endgeschwindigkeit des Bootes haben wir mit einer Lichtschranke gemessen. m[kg] δ m[kg] F[N] δ F[N] t1 [s] t2 [s] t3 [s] t4 [s] t5 [s] t¯[s] δ t[s] V[m/s] δV μ δμ 2,24E-03 5,00E-05 2,20E-02 4,91E-04 0,1277 0,1337 0,1255 0,1245 0,1211 0,1265 4,18E-03 9,289E-02 3,071E-03 2,366E-01 1,310E-02 1,34E-03 5,00E-05 1,31E-02 4,91E-04 0,1685 0,1826 0,1695 0,1673 0,1964 0,17686 1,12E-02 6,644E-02 4,217E-03 1,979E-01 1,994E-02 3,48E-03 5,00E-05 3,41E-02 4,91E-04 0,0917 0,1014 0,0999 0,0982 0,0979 0,09782 3,31E-03 1,201E-01 4,063E-03 2,842E-01 1,370E-02 2,80E-03 5,00E-05 2,75E-02 4,91E-04 0,1056 0,1077 0,107 0,1 0,0965 0,10336 4,37E-03 1,137E-01 4,806E-03 2,416E-01 1,453E-02 Als Mittelwert für den Reibungskoeffizienten ergibt sich μ = 0, 2401 ± 0, 015 Der Fehler der Zeitmessung ergibt sich aus: δt = 1 4 ∑ (t¯ − ti)2 . 3 i=1 Die Geschwindigkeit V ist gegeben durch V = δst . s ist die Breite der Fahne, welche auf dem Boot angebracht ist und die Lichtschranke für das Zeitintervall Δt unterbricht. s beträgt 0, 01175m. Die Fehler der errechneten Größen ergeben sich nach den üblichen Gesetzen der Fehlerfortpflanzung. 3.3.2 Berechnung des Wirkungsgrades Nun wollen wir nach den unter Abschnitt 2.3 beschriebenen Zusammenhängen den Wirkungsgrad η = Pmech Pel abschätzen. Konkret können wir den Wirkungsgrad über die Reibungskraft Fr mit Reibungskoeffizient μ berechnen: η= FR2 . μ ·U · I 23 (6) 3.3 Bestimmung des Wirkungsgrades U[V ] 6 9,5 13 15 17 I[A] 5,5 10,6 15,7 19,2 24 Pel. [W ] 33 100,7 204,1 288 408 3 MESSUNG UND AUSWERTUNG F[N] 2,331E-03 4,661E-03 6,992E-03 9,322E-03 1,072E-02 Pmech [W ] 2,263E-05 9,050E-05 2,036E-04 3,620E-04 4,788E-04 ν 6,856E-07 8,987E-07 9,977E-07 1,257E-06 1,173E-06 Tabelle 1: Messergebnisse für das erste Boot in Kaliumnitratlösung. U[V ] 7 9,35 10,89 2,67 4,55 10,86 I[A] 10,69 14,8 17,56 2,85 6,17 17,67 Pel. [W ] 74,83 138,38 191,2284 7,6095 28,0735 191,8962 F[N] 1,240E-02 1,612E-02 1,860E-02 3,721E-03 7,441E-03 2,108E-02 Pmech [W ] 6,407E-04 1,083E-03 1,442E-03 5,766E-05 2,306E-04 1,852E-03 ν 8,562E-06 7,824E-06 7,538E-06 7,577E-06 8,216E-06 9,649E-06 Tabelle 2: Messergebnisse für das zweite Boot in Kaliumnitratlösung. U[V ] 2,77 4,4 8,8 12,7 13,8 14,3 15,9 I[A] 0,7 1,4 1,8 2,6 2,8 2,9 3,2 Pel. [W ] 1,939 6,16 15,84 33,02 38,64 41,47 50,88 F[N] 1,350E-03 2,025E-03 2,701E-03 4,051E-03 4,051E-03 5,401E-03 5,401E-03 Pmech [W ] 7,595E-06 1,709E-05 3,038E-05 6,835E-05 6,835E-05 1,215E-04 1,215E-04 ν 3,917E-06 2,774E-06 1,918E-06 2,070E-06 1,769E-06 2,930E-06 2,388E-06 Tabelle 3: Messergebnisse für das zweite Boot in 3, 5% NaCl-Lösung. 24 3.3 Bestimmung des Wirkungsgrades 3 MESSUNG UND AUSWERTUNG 100 90 80 (P2/P1)*E−7 70 60 50 40 30 20 10 0 2 4 6 8 10 U[V] 12 14 16 18 Abbildung 14: Wirkungsgrad des Antriebs aufgetragen über der Spannung, um die Ergebnisse der unterschiedlichen Messung in einem Schaubild darstellen zu können. 25 3.4 Messung des B-Feldes 3 MESSUNG UND AUSWERTUNG 3.4 Messung des B-Feldes Um qualitative Aussagen über die Effizienz unserer beiden Boote machen zu können, maßen wir ihr BFeld in der relevanten Richtung aus. Auf der Skizze hieße das in z-Richtung. Es geht uns dabei in erster Linie um die Homogenität, welche wir in der Theorie angenommen haben. z y x Abbildung 15: Koordinatensystem zur Messung des B-Feldes Wir brachten also eine Hall-Sonde horizontal ein. Und zwar auf drei z-Ebenen (z = 0.5, 1.5, 3.0 cm). Auf diesen Ebenen wurde die vordere Hälfte des Bootes gemessen, da die hintere dazu symmetrisch ist. Wiederum gibt es hier jeweils 3 y- und 5 x-Werte. Folgende Daten ergaben sich: 26 3.4 Messung des B-Feldes 3 MESSUNG UND AUSWERTUNG • Boot 1 x [cm] 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 0.5 2 3 4.5 y [cm] 1 1 1 1 3 3 3 3 5 5 5 5 1 1 1 1 3 3 3 3 5 5 5 5 1 1 1 1 3 3 3 3 5 5 5 5 z [cm] 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 2.5 27 Bz [mT] -1.7 89 57 -1.1 -6.3 3.4 3.8 -0.69 -8.3 150 160 -7.6 4.3 44 35.5 1.3 1.8 30 36 0.9 5.3 39 54 4 0.72 52 42 -1.7 -2 18 23 -2 -3.6 120 110 -2.9 3.4 Messung des B-Feldes 3 MESSUNG UND AUSWERTUNG • Boot 2 x [cm] 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 0.5 1.5 3 4.5 y [cm] 1 1 1 1 2.5 2.5 2.5 2.5 5 5 5 5 1 1 1 1 2.5 2.5 2.5 2.5 5 5 5 5 1 1 1 1 2.5 2.5 2.5 2.5 5 5 5 5 z [cm] 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 1.5 3 3 3 3 3 3 3 3 3 3 3 3 Bz [mT] 110 82 77 400 29 3 8.6 24 81 61 46 110 18 32 33 23 7 -0.3 -3 -7.9 24 37 39 27 51 59 63 100 61 24 11 25 82 65 52 97 Um dies anschaulich zu machen, ist jede z-Ebene separat geplottet und manuell übereinander gesetzt. Dies ergibt folgende Schaubilder: 28 3.4 Messung des B-Feldes 3 MESSUNG UND AUSWERTUNG • Boot 1 [mT] 160 140 120 100 80 60 40 20 0 [mT] 160 140 120 100 80 60 40 20 0 [mT] 160 140 120 100 80 60 40 20 0 0.5 1 1.5 2 2.5 [cm] 3 3.5 4 29 4.5 1 1.5 2 2.5 3 3.5 [cm] 4 4.5 5 3.4 Messung des B-Feldes 3 MESSUNG UND AUSWERTUNG • Boot 2 [mT] 400 350 300 250 200 150 100 50 0 [mT] 400 350 300 250 200 150 100 50 0 [mT] 400 350 300 250 200 150 100 50 0 5 4.5 4 3.5 1 3 1.5 2 2.5 2.5 3 2 3.5 4 [cm] [cm] 1.5 4.5 1 Es lässt sich dazu allgemein sagen, dass die Anordnungen der Magnete gut zu sehen sind. Vor allem bei Boot 1, sieht man vorne und in der Mitte des Bootes (entspricht y = 1 cm und y = 5 cm) eindeutige Maxima in den Magnetfeldern. Bei Boot 2 ist zu erkennen, dass das Feld viel gleichmäßiger ist und mehr Volumen besser durchsetzt ist. Dadurch erfahren mehr Ionen eine größere Lorentzkraft, was zu einer Verbesserung des Antriebs führt. Diese Erkenntnis sehen wir auch quantitativ im Vergleich der beiden Kraftmessungen der Boote. Der Messwert von 400 mT bei Boot 2 springt hier etwas aus der Reihe. Wenn man jedoch die Größe enstprechenden Werte an den anderen Ecken betrachtet, spricht viel dafür, dass es sich um einen Messfehler handelt. 30 3.5 Schwierigkeiten bei den Messungen 4 FAZIT 3.5 Schwierigkeiten bei den Messungen Bei den Messungen hatten wir verschiedene Probleme. Das wichtigste war das, welches sich schon zu Anfang zeigte: Die durch den Ionenantrieb erzeugten Kräfte waren so gering, dass es sehr schwer war, einen Aufbau zur Messung dieser Kraft zu finden, der gleichzeitig nicht selbst zu stark auf das Boot einwirkte. Dies gelang uns am besten mit dem beschriebenen Aufbau mit einer Aufhänung an den Stromleitungen und der Betrachtung dieses Systems als physikalisches Pendel. Bei der Strommessung hatten wir ein weiteres Problem: Am Anfang der Messung stieg der gemessene Strom kurz an und fiel dann wieder im Laufe der Messung ab. Der anfängliche starke Anstieg könnte damit zusammenhängen, dass sich die Verwirbelungen der in Bewegung geratenden Lösung negativ auf den Ionenfluss auswirken, bis sich eine konstante Strömung eingestellt hat. Der länger wirkende negative Effekt könnte durch bei der Elektrolyse entstehende Ablagerungen an den Elektroden entstehen, welche wie eine isolierende Schicht an den Leiterplatten wirken und so den Stromfluss hemmen. Ionen, die sich dort anlagern, mit denen aber kein Ladungsaustausch stattfindet, bewirken ein E-Feld in die entgegengesetzte Richtung, wodurch das von den Elektroden erzeugte E-Feld abgeschwächt wird. Besonders bei Messungen über längere Zeiträume war eine starke Korrosion der Elektroden unseres Bootes zu erkennen. Besonders die Aluminiumplatten des ersten Bootes wurden stark angegriffen, aber auch bei den Kupferelektroden des zweiten Bootes waren Abnutzungen zu erkennen (s.u.). Zudem fielen in den zwei Lösungen Schwebstoffe aus, die das Wasser sehr trüb machten. Der ausgefallene Stoff in der Kaliumnitratlösung war bläulich und kristallisierte beim Trocknen größtenteils aus. Abbildung 16: Korrosion der Elektrode von Boot 2 und Auskristallisierung am Boden der Gefäße 4 Fazit Es ist ungelungen, einen funktionierenden Ionenantrieb zu realisieren, welcher in Meerwasser auch tatsächlich funktionstüchtig wäre. Der Wirkungsgrad der getestenen Antriebe ist allerdings sehr gering. Bei einer Konstruktion wäre besonders auf die Homogenität des B-Feldes zu achten, da dessen Auswirkun- 31 5 LITERATURVERZEICHNIS gen auf den Wirkungsgrad von allen beeinflussbaren Größen am stärksten war. Wir persönlich haben aus diesem Projekt gelernt, dass bei der wissenschaftlichen Untersuchung eines Phänomens - so einfach es in der Theorie auch sein mag - beliebig viele Randeffekte in Erscheinung treten. Mit diesen umzugehen ist mühselig und bedarf viel Arbeit. Man muss ein breites Gebiet an Wissen haben um alles im Detail zu verstehen, was wohl nie möglich ist. 5 Literaturverzeichnis • Abschnitt 2.1: G. ACKERMANN , W. J UNGELT, H.-H. M ÖBIUS , H. S USCHKE , G. W ERNER : Elektrolytgleichgewichte und Elektrochemie, Verlag Chemie, Weinheim 1974 32