Bilderbuch 5-Teil 1 - Fakult at f ur Physik
Werbung

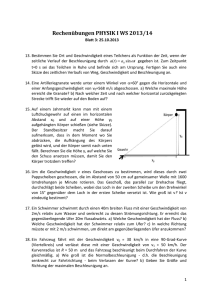
Entfernung als Integral
Grenzübergang
die Zeitschritte ∆t infinitesimal klein wählen,
Kapitel 5
x(ta ! tb ) = lim
t!0
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0
v(ti )
t=
i
tb
vHtL
vHtL
Modell von Newton
X
ta
2
4
6
8
Z
tb
v(t) dt
ta
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0
tb
ta
2
t
4
6
8
t
1
Entfernung als Integral
3
Beschleunigung
Geschwindigkeit definiert als Ableitung des Ortes nach der Zeit
Umkehr des Gedankens:
Strecke als Zeitintegral über die Geschwindigkeit
vHtL
vHtL
tb
ta
2
4
6
t
8
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0
x
t
ax := lim
vx
t
t!0
xta !tb ⇡ v(t2 ) t + v(t3 ) t + . . . + v(t6 ) t ⇡
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0.0
0
vx := lim
tX
b =7
v(t) t
t!0
ta =2
Definition
vx := dx/dt = ẋ
tb
Geschwindigkeit
ta
2
4
6
Beschleunigung
8
t
2
d~r(t)
= ~v (t)
dt
d~v (t)
= ~a(t)
dt
oder
~r˙ = ~v
oder
~v˙ = ~a
4
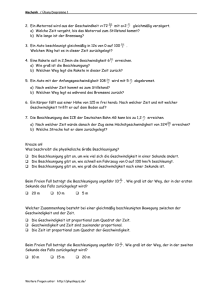
Schräger Wurf
konstante Beschleunigung
formale Lösung mit Anfangsbedigungen
d ~r(t)
= ~a(t) = const
dt2
~r(0) = {0, 0, h}
~v (0) = {vx0 , 0, vz0 }
⇥dt
d~v (t) = ~a dt
~r(t) =
Z
~a dt = ~a
~v (t) dt =
Z
Z
dt = ~a t + C1
aus den
Anfangsbedingungen
z HmL
~v (t) =
Z
3
3 2
vx0 t
x(t)
5
4 y(t) 5 = 4 0
1
2
z(t)
2 g t + vz0 t + h
2
~a = {0, 0, g}
2
d~v (t)
= ~a
dt
konstante Beschleunigung
20
20
15
15
z HmL
Bewegungsgleichung
10
5
1
(~a t + C1 )dt = ~a t2 + C1 t + C2
2
0
10
5
0
0
0.0 0.5 1.0 1.5 2.0
t HsL
2
4
x HmL
6
8
5
Freier Fall
7
Schräger Wurf
konstante Beschleunigung
~v (0) = {0, 0, 0}
5
0
-5
-10
-15
0.0
vzHtL = - g t
0.5
1.0 1.5
t HsL
az Hmês2L
~r(0) = {0, 0, h}
25 zHtL = -g t2 ê 2 + h
20
15
10
5
0
0.0 0.5 1.0 1.5 2.0
t HsL
vz HmêsL
z HmL
~a = {0, 0, g}
2.0
0
-2
-4
-6
-8
azHtL = - g
-10
-12
0.0 0.5 1.0 1.5 2.0
t HsL
Wurfparabel
3
3 2
vx0 t
x(t)
5
4 y(t) 5 = 4 0
1
2
z(t)
2 g t + vz0 t + h
2
~a = {0, 0, g}
~r(0) = {0, 0, h}
~v (0) = {vx0 , 0, vz0 }
eliminieren von t
20
~v (t) dt =
Z
dt = ~a t + C1
aus den
15
Anfangsbedingungen
z HmL
~r(t) =
Z
~a dt = ~a
Z
z HmL
~v (t) =
Z
20
10
5
1
(~a t + C1 )dt = ~a t2 + C1 t +0 C2
2
0.0 0.5 1.0 1.5 2.0
t HsL
6
z(x) =
15
1 g 2 vz0
x+h
2 x + v
2 vx0
x0
10
Scheitelpunkt
5
0
0
2
4
x HmL
6
8
xs = vz0 vx0 /g
8
Trajektorien
Anstiegswinkel
0
axHtL
0
vxHtL
vx0
vxHtL
vx0 = v0 cos ↵
vz0 = v0 sin ↵
xHtL
a
graphische Untersuchung
Wir kennen x(t), vx(t), oder ax(t) aus einer Beobachtung:
v0
vz0
0
0
Krümmung der Bahn
und suchen eine graphische Darstellung der anderen kinematischen Größen:
zHxL
10 v0z
R
5
5
1.5 2.0
0
0
v0x
0
2
4
x HmL
6
-5
8
0
5
10 15 20 25 30
x HmL
0
t
0
xHtL
10
v0x
t
vxHtL
15
t
xHtL
15
t
axHtL
20
t
d2zêdx2 = -gêv0x2= 1êR
axHtL xHtL
20
z HmL
z HmL
25
axHtL vxHtL
L
Schräger Wurf
0
t
0
t
t
9
Schräger Schuss
11
Newtonsche Axiome
Affenjagd
1. Axiom
• Ein freier Körper ändert seinen Bewegungszustand nicht.
• Ein Körper bleibt in Ruhe oder bewegt sich geradlinig mit konstanter
Geschwindigkeit, wenn keine resultierende äußere Kraft auf ihn einwirkt.
Die resultierende Kraft ist die Vektorsumme aller Kräfte, die auf den
Körper einwirken.
X
F~i = 0 .
(1)
F~ =
i
Dieses Gesetz kann man auch unter dem Begriff Trägheitsprinzip verstehen.
Alle Affen fallen gleich schnell,
wie auch alle Gewehrkugeln.
http://www.physik.uni-regensburg.de/Ausstellungen/DEZ_Physik10/plakate/affe.pdf
10
12
Newtonsche Axiome
2. Axiom
Newtonsche Axiome
3. Axiom
Impulserhaltungssatz
Eine Änderung des Bewegungszustandes ist eine Folge
der Wechselwirkung des Körpers mit seiner Umgebung.
p~1 + p~2
d~
p1
d~
p2
+
dt
dt
~
F1 + F~2
=
const
=
0
=
0
Die Rate mit der sich der Impuls ändert ist gleich der Kraft
d~
p
⌘ F~
dt
F~1 =
Actio = Reactio
F~2
13
Newtonsche Axiome
zum 2. Axiom
15
Kräftevergleich
V (z) =
m
ax =
Fz
Mg
=
m
m
F (z)
M
Fz=-Mg
=
=
m ax = M g
1
ks (z
2
Federwaage
z0 ) 2
~ (z)
rV
ks (z
z0 )
ksHz0-zL
z0
m
z
-mg
Gleichgewichtsposition bei :
14
ks (z0
z)
mg = 0
16
Träge und schwere Masse
Äquivalenzprinzip
v=gt
Beschleunigung
Satellitenbahn
Y
v = lim
!s
R
R
t!0
↵
d↵
=R
= R!
t
dt
!Α
m
0
F=-mg
0
m
X
h
Ohne Beschleunigung bewegt sich der Satellit
in der Zeit t vom Punkt P1 zum Punkt P20 .
F=-mg
P2
Da
Die Federausdehnung ist entweder
eine Folge der Schwerebeschleunigung g
oder
sie resultiert aus der beschleunigten Bewegung des Fahrstuhls
im gravitationsfreien Raum mit der Geschwindigkeit v = gt.
Kreisbeschleunigung so, als ob der Satellit
in der Zeit t vom Punkt P20 zum Punkt P2 fällt.
P2'
vt
P1
R
RE
a = v 2 /R
17
Beschleunigung
1
v”12 Dt
v”23 Dt
2
bei gleichförmiger Kreisbewegung
v”23 Dt
19
Beispiel
Satellitenbewegung
a = v 2 /R
3
a Dt2
~v23
a(h) = g
R=RE +h
~v12 = ~a t
RE
v(h) =
|~a| / v 2 /R
R
p
2
RE
(RE + h)2
p
g RE
(RE + h) a(h) = p
RE + h
Der Betrag der Geschwindigkeit ist konstant,
aber die Richtung der Geschwindigkeit ändert sich.
|~v12 | = |~v23 | = v
8
20
7
15
10
5
0
18
v H kmês L
T H Stunden L
T = 2 R ⇡/v
25
0
10 000 20 000 30 000 40 000
Höhe über der Erde H km L
6
5
4
3
0
10 000 20 000 30 000 40 000
Höhe über der Erde H km L
20
Energie und Kraft
mechanische Arbeit
~ (~r) den Weg
Eine Masse legt im Kraftfeld F
W = F~ ·
W =
geschlossener Weg
r`
Gravitationsfeld der Erde
Z
R
[W ] = N · m = Joule = J
Z
P2
P1
H2L
H1L
Gravitationsfeld Erde und Mond
Y
F~ · d~r
1.0
1
0.75
P1
ME
=6
MM
ME
""""""""""""" # 81
MM
0.5
0.5
0.25
0.0
0
X
I
Kraftfelder
~r zurück.
P2
~r
Linienintegral
Kraftfelder
!0.25
-0.5
!0.5
F~ · d~r = 0
!0.75
konservative Kraftfelder
-1.0
-0.5
!0.25 0 0.25 0.5 0.75 1 1.25 1.5
0.0
0.5
1.0
1.5
21
Kraftfelder
Bewegung im Kraftfeld
23
Kraftfelder
Stabilitätsanalyse
neutraler Punkt
1
y
y
y
0.75
y
ME
""""""""""""" # 81
MM
0.5
0.25
2
2
ME /rE
= MM /rM
0
!0.25
!0.5
!0.75
geschlossener Weg
x
x
!0.25 0 0.25 0.5 0.75 1 1.25 1.5
m
I
F~ · d~r = 0
F~ =
~ V =
grad
konservative Kraftfelder
~ =
rV
⇢
r` E
F
ME
@V @V @V
,
,
@x @y @z
r` M
labil
Gleichgewichtslagen in der
klassischen Mechanik
stabil
pot. Energie
x
pot. Energie
x
indifferent
MM
Distanz
22
24