Aus dem Institut für Biomedizinische Bildanalyse - IBIA
Werbung

Institut für Biomedizinische Bildanalyse
4D-Segmentierung
von
MRI-Daten
menschlicher Herzen
Bachelorarbeit
zur Erlangung des Titels
„Bachelor of Science Medizinische Informatik“
der Privaten Universität für Gesundheitswissenschaften,
Medizinische Informatik und Technik
vorgelegt von
Johannes Holzmeister
aus
Steinach am Brenner
Hall in Tirol, 2004
Inhaltsverzeichnis
Inhaltsverzeichnis ..................................................................................................................................... 1
1 Einleitung .............................................................................................................................................. 3
1.1 Allgemein......................................................................................................................................... 3
1.2 Zielsetzung ...................................................................................................................................... 5
2 Anatomische und physiologische Grundlagen: Das Herz............................................................... 6
2.1 Die Anatomie des Herzens ............................................................................................................. 6
2.1.1
Allgemein ................................................................................................................................................ 6
2.1.2
Der Blutkreislauf...................................................................................................................................... 9
2.1.3
Die Herzventile........................................................................................................................................ 9
2.1.3.1
Segelklappen ................................................................................................................................ 10
2.1.3.2
Taschenklappen............................................................................................................................ 10
2.2 Die Physiologie des Herzens ........................................................................................................ 11
2.2.1
Die Aktionsphasen des Herzens ........................................................................................................... 11
2.2.1.1
Die Systole .................................................................................................................................... 12
2.2.1.2
Die Diastole................................................................................................................................... 12
3 Methoden............................................................................................................................................. 14
3.1 Bildgebung und benutzte Bilddaten .............................................................................................. 14
3.2 Datenquellen ................................................................................................................................. 17
3.3 Die Segmentierung ....................................................................................................................... 17
3.3.1
Die Region-Growing- und Level-Set-Methode ...................................................................................... 19
3.4 „amira 3.0“ .................................................................................................................................. 21
3.4.1
Verwendete amira 3.0-Tools .............................................................................................................. 21
3.4.2
Manuelles Segmentieren mit amira 3.0 .............................................................................................. 23
3.5 „I-PRESP“...................................................................................................................................... 26
3.5.1
Automatische Segmentierung mit I-PRESP .......................................................................................... 26
3.5.1.1
Vorverarbeitungsschritte ............................................................................................................... 26
3.5.1.2
Der Segmentierungsprozess......................................................................................................... 28
3.5.1.2.1 Die Segmentierung mit „Fast Marching Level Sets“ und „Active Geodesic Level Sets“.......... 28
3.5.1.2.2 Die Segmentierung unter Verwendung von Templates .......................................................... 30
4 Ergebnisse .......................................................................................................................................... 31
4.1 Segmentierte Zyklen ..................................................................................................................... 31
4.1.1
amira 3.0 Zyklen................................................................................................................................. 31
4.1.2
I-PRESP Zyklen .................................................................................................................................... 32
4.2 Parametereinstellungen ................................................................................................................ 35
4.3 Quantitativer Vergleich mit „Similarity Match“ ............................................................................... 36
4.4 Weitere Ergebnisse....................................................................................................................... 37
5 Diskussion .......................................................................................................................................... 38
1
5.1 Segmentierte Zyklen ..................................................................................................................... 38
5.1.1
amira 3.0 ............................................................................................................................................ 38
5.1.2
I-PRESP................................................................................................................................................ 39
5.2 Parametereinstellungen ................................................................................................................ 41
5.3 Similarity Match ............................................................................................................................. 42
5.4 Allgemeine Zusammenfassung..................................................................................................... 42
6 Zusammenfassung............................................................................................................................. 43
7 Abstract ............................................................................................................................................... 44
8 Danksagung ........................................................................................................................................ 45
9 Curriculum vitae ................................................................................................................................. 46
10 Literaturverzeichnis ........................................................................................................................... 47
11 Bildquellen .......................................................................................................................................... 48
12 Appendix ............................................................................................................................................. 49
2
1 Einleitung
1.1 Allgemein
Die Entdeckung der Röntgenstrahlung im Jahre 1895 durch Wilhelm Conrad Röntgen war die
Geburtsstunde der Biomedizinischen Bildgebung. Dies was ein bahnbrechendes Ereignis für die
damalige Medizin, da es zum ersten Mal möglich war, die menschliche Anatomie auf anschaulichste
Weise darzustellen und zu repräsentieren. Gleichsam läutete es eine Zeit ein, in der es zum Ziel wurde
technische Geräte und verschiedenste Methoden zu entwickeln um eine bessere Qualität mit mehr
Details der menschlichen Anatomie zu erreichen. Durch solche leistungsfähigere Techniken wird der
diagnostische Blick des Arztes in das Innere des menschlichen Köpers zunehmend präziser. So ist es
dem Arzt möglich dem Patienten etwaige Risikofaktoren und somit Konsequenzen in dessen weiterer
Behandlung und Therapie aufzuzeigen noch bevor der Patient überhaupt die Symptome seines Leidens
bemerken kann. Die bildgebenden Verfahren sind aus diesen Gründen in der Medizin nicht mehr
wegzudenken. Zu den meist verwendeten Technologien in Kliniken und Krankenhäusern zählen neben
der konventionellen Röntgenuntersuchung, der Ultraschall (US), die Computertomographie (CT), die
Positronen-Emissions- (PET) und die Magnetresonaz-Tomographie (MR).
Die stetigen Fortschritte auf dem Sektor der Bildqualität dienen einerseits als Basis für die Entwicklung
von neuen, andererseits dienen sie der Verfeinerung von bestehenden Methoden, um noch tiefere
Einblicke in den menschlichen Körper zu bekommen. Eine vollautomatische 3-dimensionale (3D)
Darstellung der menschlichen Anatomie ist sicherlich ein erster Schritt, um das Diagnostizieren im
zukünftigen Klinikalltag zu erleichtern. Dabei rückt nun ein klassischer Nachteil der derzeitigen
Biomedizinischen Bildgebung in den Vordergrund: fast alle Geräte haben eine begrenzte Möglichkeit in
der Darstellung eines 2-dimensionalen (2D) Bildes eines Organs, indem Schritt für Schritt eine Ebene
entlang einer bestimmte Achse des Körpers gescannt wird. Die fehlerfreie Interpretation eines 2D
Schichtbildes von 3D Objekten stellt eine spezielle Herausforderung an den Mediziner dar und forciert
die Weiterentwicklung von 3D-Tools, um schnellere wie zuverlässigere Diagnosen erstellen zu können.
Da die Erzeugung von 3D Repräsentationen aus 2D Bildern keine triviale Aufgabe ist, bietet sich hier ein
freies unabhängiges Forschungsfeld für die Biomedizinischen Bildgebung an.
Optimierte Verfahren sind aber nach wie vor nicht artefaktfrei, so können beispielsweise die
physiologische Organlage im Körper sowie atemabhängige Brustkorbbewegungen Störeinflüsse
bedingen, welche schließlich die Qualität des zu diagnostizierenden Bildes erheblich beeinträchtigen und
so deren Interpretation unnötigerweise erschweren.
Dieses Problem zu lösen wäre sicherlich der erste Schritt um eine exakte und somit zur sicheren
Diagnosestellung verwendbare 3D Repräsentation des menschlichen Körpers zu erhalten. Auf der einen
Seite ist es immens wichtig, die Qualität des Bildes an sich zu verbessern sowie die Bildbeschaffung an
die Darstellungsform anzupassen. Andererseits besteht die Notwendigkeit einer Methode, welche die
Grenzen eines gewählten Objektes in einem medizinischen Bild erkennt, wie z. B. das Herz in einem
3
„Magnetic Resonace Imaging“-Tomogramm. Die Standardmethode ist nach wie vor die manuelle
Segmentierung und Darstellung des gewünschten Objektes durch medizinische Experten, was mit einem
großen Zeitaufwand verbunden ist, wobei die Objektivität und somit die Vergleichbarkeit nicht unbedingt
gegeben ist. Somit wird eine Methode gesucht, die dieses Problem so schnell, so sorgfältig und so
objektiv wie möglich löst. Das Programm „I-PRESP“ (IBIA-Preprocessing and Segmentation Pipeline) [1],
eine weitgehende automatische Segmentierungs-Pipeline von Dr. Karl Fritscher, ist ein erster Ansatz um
den Zeitaufwand erheblich zu minimieren.
Das Herz als zentraler Motor des Kreislaufes stellt ein interessantes und herausforderndes Organ dar,
nicht zuletzt auch deswegen, weil die Mehrzahl der Todesfälle mit diesem Organ im Zusammenhang
stehen (Akutes Koronarsyndrom, Herzinfarkt, Herzinsuffizienz, etc …). Es gibt viele Gruppen und
wissenschaftliche Arbeiten die sich deshalb ausschließlich mit der Segmentierung und Modellierung des
Herzens [2] [3] [4] beschäftigen.
Ein Hauptforschungsthema am Institut für Biomedizinische Signalverarbeitung und Bildgebung (IBIA) der
Privaten Universität für Gesundheitswissenschaften, Medizinische Informatik und Technik (UMIT) ist die
4D Darstellung und Analyse von Herzen, um einerseits populationsspezifische Herzformen und
andererseits durch Zyklen bedingte Formänderungen zu studieren.
Die Daten die in dieser Arbeit verwendet werden, entstammen der Kooperation des IBIA und der
Abteilung für Kardiologie und der Abteilung für Radiologie I (beide gehören der Medizinischen Universität
Innsbruck an). Die Analyse basiert auf einer Zeitserie von EKG-getriggerten MRI “short-axis“ Scans des
menschlichen Herzens von vier gesunden männlichen Probanden im Alter zwischen 25 und 50 Jahren.
Diese vier Zyklen beginnen mit der R-Zacke (0 ms) des Elektrokardiogramms und repräsentieren nahezu
den gesamten Herzzyklus in 50 ms Schritten. So erhält man ca. 14 segmentierte Herzen pro Herzzyklus
bei einem Pulsschlag von ca. 70 Schlägen pro Minute.
Führt man sich die komplexe Struktur des Herzens vor Augen, so wird schnell deutlich, dass ein
möglicher Segmentierungsalgorithmus nicht nur robust, sondern gleichzeitig auch sehr flexibel sein
sollte. Insbesondere topologische Veränderungen stellen eine Herausforderung dar, die von den
verschiedenen Ansätzen unterschiedlich gut bewältigt werden können. Neben der Organkomplexität
stellt die Datenqualität eine Herausforderung dar u. a.: teilweise zu geringer Kontrast zwischen den
Kammern und dem umliegenden Muskelgewebe; die atemabhängige Bewegung des Herzens; weiters ist
die Grenze zwischen den Vorhöfen und den Kammern oft nur sehr schwer erkennbar, weil die
Herzklappen im MRI kaum sichtbar sind.
4
1.2 Zielsetzung
Ziel dieser Bachelorarbeit ist es, zwei Arten der Segmentierung experimentell gegenüber zustellen und
Erfahrungen für die weitere Softwareentwicklung zu sammeln. Für die manuelle Segmentierung wird die
Software „amira 3.0“ und für das weitgehend automatische Segmentieren das Programm „I-PRESP“
verwendet.
Dabei sollen im Speziellen folgende drei Hauptpunkte untersucht werden:
•
Segmentierte Zyklen des Herzens:
Ein wesentliches Ergebnis soll die Segmentation von Herzzyklen sein.
•
Parametereinstellungen:
In Zuge dessen ist es wichtig objektspezifische Parameter zu finden, die die Basis für folgende
Segmentationsprozesse darstellen.
•
Quantitativer Vergleich verschiedener Methoden:
Die erzielten Ergebnisse sollen quantitativ gegenübergestellt werden, um Richtwerte für
zukünftige Arbeiten zu erhalten.
Folgende Punkte müssen ebenfalls berücksichtigt werden:
•
Effizienz:
Hier wird einerseits der Zeitaufwand für das Segmentieren der Zyklen beobachtet, andererseits
wird auf die Einarbeitungszeit der verwendeten Programme geachtet.
•
Softwaredesign:
Die Benutzeroberfläche und das Softwarekonzept sollen erprobt, Probleme erkannt und
eventuelle Lösungen vorgeschlagen werden.
Auf diese Punkte wird nun in der folgenden Arbeit eingegangen und die erzielten Ergebnisse auf
anschauliche Weise dargestellt.
5
2 Anatomische und physiologische Grundlagen: Das Herz
Im diesem Kapitel wird kurz auf die Anatomie und die Physiologie des Herzens eingegangen
(wesentliche Grundlage für den Segmentierungsprozess).
2.1 Die Anatomie des Herzens
2.1.1 Allgemein
Das Herz und die Gefäße sind die Kreislauforgane. Im nachgeburtlichen Kreislauf des Menschen
unterscheidet man den großen (Körper-) Kreislauf zur Versorgung aller Organe und den kleinen
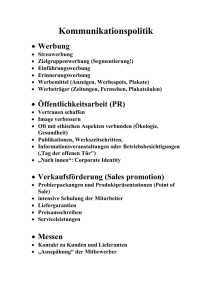
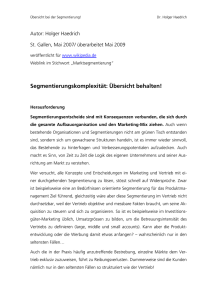
(Lungen-) Kreislauf, der dem Gasaustausch dient. Beide sind in Form einer 8 hintereinander geschaltet,
in ihrer Kreuzung liegt als Saug- und Druckpumpe das Herz [5]. Abbildung 1 zeigt eine vereinfachte
Darstellung der Kreislauforgane.
Abbildung 1: Vereinfachtes Schema der Kreislauforgane. [A1]
1
Herz
2
Kleiner Kreislauf
3
Großer Kreislauf
Das Herz ist ein muskuläres Hohlorgan, das zur Beförderung von Blut in den Kreislauf eingeschalten ist.
Das Septum cordis (die Scheidewand), teilt das Herz in eine linke und eine rechte Hälfte. Die linke Hälfte
ist dem Körperkreislauf, die rechte Hälfte dem Lungenkreislauf zugeordnet. Beide Hälften sind unterteilt
6
in je ein Atrium (Vorhof) und einen Ventrikel (Kammer). Die Richtung, in die das Herz vom Blut
durchströmt wird, wird von den Herzklappen bestimmt, die ungefähr in einer Ebene liegen [6].
Die Größe des Herzens entspricht ungefähr der geschlossenen Faust des Menschen. Das Gewicht
beträgt ca. 250- 300 g. Es transportiert im Ruhezustand ca. 8.000 l Blut durch den Körper (bei 70
Schlägen pro Minute; 80 ml Schlagvolumen) [6].
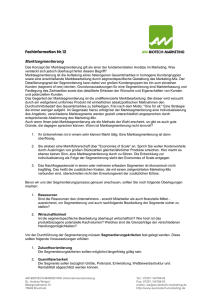
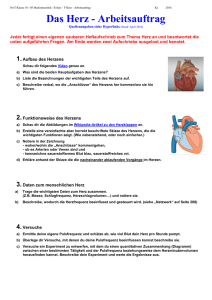
Das Herz liegt im Mediastinalraum zwischen den beiden Lungenflügeln. Zwei Drittel befinden sich hinter
der linken Brustkorbhälfte und ein Drittel hinter der rechten Brustkorbhälfte. Abbildung 2 zeigt die Lage
des Herzens.
Das Herz grenzt [7]:
•
Ventral an die Rückseite des Sternums
•
Lateral an den rechten und linken Pulmonalflügel
•
Dorsal an die Aorta und an den Oesophagus
•
Kaudal an das Diaphragma thoraco-abdominale.
Abbildung 2: Die Lage des Herzens im Mediastinalraum. [A2]
1
Aorta
2
Truncus pulmonalis
3
Vena cava superior
4
Atrium dextrum
5
Arteriae pulmonales
6
Ventriculus sinister
7
Ventriculus dexter
8
Aorta abdominalis
9
Vena cava inferior
10 Sternum
11 Diaphragma thoraco-abdominale
7
Die Form des Herzens wird mit einem aufgebauchten Kegel verglichen, dessen Basis nach rechts hinten
oben und dessen Spitze nach links unten gerichtet ist. Die Achse verläuft also in situ schräg.
Die beiden Ventrikel werden von außen scheinbar durch einen Sulcus interventricularis getrennt. Die
Herzspitze selbst wird von der Muskulatur der linken Kammer gebildet. Die Grenze zwischen den
Ventrikeln und den Atrien ist äußerlich durch den Sulcus coronarius gekennzeichnet. Die beiden Atrien
besitzen sackartige Auriculae cordis (Herzohren), die die großen Gefäßstämme umgreifen. Der Sulcus
terminalis trennt die Vena cava superior vom Atrium dextrum. Der Ventriculus dexter geht in den Truncus
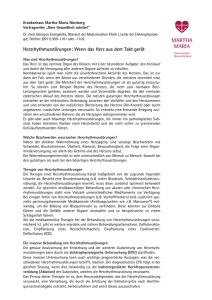
pulmonalis über [6]. Hierzu siehe Abbildung 3.
Die Lage der großen Gefäße, nämlich Truncus pulmonalis und Aorta einerseits, sowie Vena cava inferior
und superior und Venae pulmonales andererseits, dienen der Orientierung am Herzen. In situ liegt die
Verlaufsrichtung der Vena cava inferior und superior in einer vertikalen Achse; der Austritt des Truncus
pulmonalis liegt ventral links von der Aorta. Die 4 Venae pulmonales erreichen von der Seite her das
Atrium sinistrum [6].
Abbildung 3: Die Gestalt des Herzens von ventral (linkes Bild) und von dorsal (rechtes Bild). [A1]
1
Aorta
2
Truncus pulmonalis
3
Vena cava superior
4
Atrium dextrum
5
Venae pulmonales
6
Vena cava inferior
7
Auriculum sinister
8
Auriculum dextrum
9
Ventriculus dexter
10 Ventriculus sinister
11 Sulcus interventricularis anterior
12 Sulcus coronarius
13 Sinus coronarius
8
2.1.2 Der Blutkreislauf
Im großen Kreislauf gelangt das Blut aus dem Atrium sinistrum in den Ventriculus sinister. Über die Aorta
erreicht es das Kapillargebiet der Organe. Aus den Beinen und der unterer Rumpfhälfte fließt das Blut
über die Vena cava inferior (untere Hohlvene), in den rechten Vorhof. In den selbigen mündet auch die
Vena cava superior (obere Hohlvene). Sie leitet das Blut aus Kopf, den Armen und der oberen
Rumpfhälfte.
Im kleinen Kreislauf strömt das Blut aus dem Atrium dextrum in die Ventriculus dexter. Über die Arteriae
pulmonales (Lungenarterien) fließt es dann ins Kapillargebiet der Lungen, und über die Venae
pulmonales (Lungenvenen) in den linken Vorhof [5].
2.1.3 Die Herzventile
Die beiden Ventrikel haben je einen Eingang und einen Ausgang. Die Eingänge führen von den
kleineren Atrien in die größeren Ventrikel. Die Ausgänge leiten das Blut in die Aorta oder in den Truncus
pulmonalis. An diesen Übergängen, von den Atrien zu den Ventrikeln sitzen die Herzklappen oder auch
Herzventile, die sich vom Blutstrom nur in eine Richtung aufdrücken lassen. Kommt der Druck von der
anderen Seite, schlägt die Klappe zu und verhindert so die Möglichkeit des Rückflusses [7].
Abbildung 4: Blick von oben auf die Herzventilebene. Alle vier Klappen liegen in einer Ebene und
werden von einem Bindegewebsgerüst zusammengehalten, dem Herzskelett. Die Pfeile zeigen die
Flussrichtung des sauerstoffreichen (= rot) und des sauerstoffarmen (= blau) Blutes. [A1] [A2]
1
Trikuspidalklappe
2
Bikuspidalklappe
3
Aortenklappe
4
Pulmonalklappe
5
Herzskelett
9
Die
Herzventile,
zwei
Segelklappen
und
zwei
Taschenklappen,
entspringen
von
einem
Bindegewebsgerüst, dem so genannten „Herzskelett“ und liegen in etwa in einer Ebene, der Ventilebene
(Abbildung 4). Sie trennt die Vorhofmuskulatur von der Kammermuskulatur. Die Vorhof-Kammer
Mündung, wird durch eine Segelklappe, der Atrioventrikularklappe, verschlossen. Die Ausflussbahn jeder
Kammer führt durch die Taschenklappen [5].
2.1.3.1 Segelklappen
Da die Klappen zwischen den Vorhöfen und Kammern aus dünnen weißem Bindegewebe bestehen,
nennt man sie Segelklappen [7]. An der Unterfläche des freien Segelrandes ziehen feine Chordae
tendineae zu den Papillarmuskeln. Einerseits halten sie das Segel fest und andererseits hindern sie es
daran, in den Vorhof durchzuschlagen. Im rechten Herzen besteht die Segelklappe, auch
Trikuspidalklappe genannt, aus drei Segeln. Die Bikuspidalklappe, die im linken Herzen liegt, besteht nur
aus zwei Segeln [5]. Die Abbildung 5 zeigt eine Segelklappe im geschlossenen und im geöffneten
Zustand.
Abbildung 5: Segelklappe im geschlossenen und im geöffneten Zustand. [A2]
1
Segelklappe
2
Chordae tendineae
3
Papillarmuskeln
2.1.3.2 Taschenklappen
Je eine Taschenklappe liegt am Ursprung der Aorta (Aortenklappe) und eine am Ursprung des Truncus
pulmonalis (Pulmonalklappe). Jede der beiden Klappen wird aus drei Taschen zusammengesetzt, wobei
deren Unterseite gegen die entsprechende Ausflussbahn gerichtet ist [5]. Abbildung 6 zeigt die Form
einer Taschenklappe.
10
Abbildung 6: Bild A zeigt eine Aortenklappe in situ und eine auseinander geschnittene Taschenklappe.
Bild B zeigt eine Taschenklappe im geschlossenen und im geöffneten Zustand. [A1]
2.2 Die Physiologie des Herzens
2.2.1 Die Aktionsphasen des Herzens
In Ruhe beträgt die Herzfrequenz eines Menschen ca. 60 – 80 Schläge/ min [8]. Mit jeder Krontraktion
wird das Blut aus den Kammern in den kleinen Lungenkreislauf und in den großen Körperkreislauf
gepumpt. Durch die Kontraktion werden die Innenräume der Herzhöhlen verkleinert und so das Blut in
den entsprechenden Kreislauf weiterbefördert. Anschließend erschlafft die Herzmuskulatur wieder, die
Herzhöhlen erweitern sich und füllen sich wieder mit Blut [7].
In ca. 1 Sekunde laufen also die vier Aktionsphasen der Herzhöhlen ab. Die vier Phasen sind (siehe
auch Tabelle 1 und Abbildung 7):
•
die Anspannungs- (I) und Auswurfphase (II) der Systole
•
die Entspannungs- (III) und Füllungsphase (IV) der Diastole,
Wie bereits beschrieben wurde, bestimmen die Herzklappen die Strömungsrichtung des Blutes, nämlich
von den Vorhöfen in die Kammern (Aktionsphase IV), weiters von diesen in die Aorta und in den Truncus
pulmonalis (Aktionsphase II). Während der Anspannungsphase und der Entspannungsphase sind alle
Klappen geschlossen. Die Drücke, die beidseits der Klappen bestehen, sind für das Öffnen und
Schließen verantwortlich [8].
11
2.2.1.1 Die Systole
In der ersten Phase der Systole, der Anspannungsphase, sind die Segelklappen und die
Taschenklappen geschlossen und die Kammern mit Blut gefüllt. Durch die Anspannung des Myokards
wird Druck auf das Blut ausgeübt. Da der Kammerdruck aber noch nicht genug hoch ist, bleibt die
Aortenklappe und die Pulmonalklappe geschlossen [7].
Die Auswurfphase ist die zweite Phase der Systole. Wenn der Kammerdruck den Blutdruck in den
Arterien erreicht, werden bei zunächst noch ansteigendem Blutdruck die Aortenklappen geöffnet, die
Kammermuskulatur verkürzt sich, das Kammervolumen wird kleiner und ca. 70 ml Blut werden in die
Arterien ausgeworfen. Dieses Volumen wird auch „Schlagvolumen“ genannt [5]. Da der Druck in den
Arterien anschließend wieder höher ist als in der Kammer, schließen sich die Taschenklappen wieder.
Die Systole ist somit beendet und die Diastole beginnt [7].
2.2.1.2 Die Diastole
Die Entspannungsphase leitet die Diastole ein. Inzwischen haben sich die Vorhöfe wieder mit Blut
gefüllt, wobei das Senken der Ventilklappenebene mit einer Saugwirkung während der Auswurfsphase
am
meisten
dazu
beiträgt
[8].
Alle
Klappen
sind
abermals
geschlossen
und
durch
die
Myokardentspannung sinken die Kammerdrücke [7]. Nun beginnt die Füllungsphase der Ventrikel. Die
Bikuspidal- und die Trikuspidalklappe öffnen sich und das Blut fließt von den Vorhöfen in die Kammern,
da die Kammerdrücke unter die Vorhofdrücke gesunken sind. Diese Phase endet mit dem Schließen der
Segelklappen und eine neue Systole beginnt [7].
Herzzyklus
Systole
Diastole
Phasen
Segelklappen
Taschenklappen
Anspannungsphase
geschlossen
geschlossen
Auswurfsphase
geschlossen
offen
Entspannungsphase
geschlossen
geschlossen
Füllungsphase
offen
geschlossen
Tabelle 1: Die Tabelle zeigt die Aktion der Klappen während des Herzzyklus. [A1]
12
Abbildung 7: Zusammenfassende Darstellung der Herzzyklen und der Aktionsphasen. [A2]
13
3 Methoden
Im folgenden Kapitel werden die Bildgebung, benützte Bilddaten und prinzipielle Grundlagen der
Segmentation besprochen. Weiters werden die verwendeten Programme erläutert.
3.1 Bildgebung und benutzte Bilddaten
Die Magnetresonanztomographie (MRT) oder auch „Magnetic Resonace Imaging“ (MRI) genannt, wird
seit den 80-er Jahren zunehmend in der Diagnostik als bildgebende Methode eingesetzt [9]. Im
Unterschied zur Computer Tomographie (CT) werden in der MRI starke Magnetfelder und
Hochfrequenzimpulse, also Radiowellen und keine Röntgenstrahlen verwendet. Auf Grund der völlig
anderen Bilderzeugungsmodalität können Gewebekontraste besser dargestellt werden.
Mit dem „Magnetic Resonace Imaging“ können Schnittebenen in frei wählbarer Raumrichtung
aufgenommen werden. Die Volumendatensätze werden für alle Körperregionen in der medizinischen
Diagnostik herangezogen. Auch bei der Darstellung von Blutgefäßen, des Nierenhohlsystems, von
Pankreas- und Gallenwegen und bei der funktionellen Bildgebung wie zum Beispiel am Gehirn (f-MRI)
wird das MRI zunehmend verwendet.
Da heute eine Verkürzung der Bildaufnahmezeit möglich ist, können Bilder oder Bildfolgen im
Sekundenbereich angefertigt werden. Dies ermöglicht einerseits Aufnahmen vom Thorax oder vom
Abdomen während der Atemanhaltephase, andererseits sind nun sogar Aufnahmen von bewegten
Organen wie dem Herzen möglich. Diese Verbesserungen der zeitlichen Auflösung bilden die Grundlage
für die Darstellung von Funktionen, wie zum Beispiel die Bewegungsabläufe des Herzens oder die
Perfusion von Organen. „Dies verleiht der bildgebenden Diagnostik der Zukunft einen neuen Stellenwert,
der über die Bedeutung als reine Suchmethode zum Auffinden von pathologischen Veränderungen
hinaus zu einer gleichzeitigen Funktionsbeurteilung von Organsystemen führt, d. h., dass mittels einer
Untersuchung eine Vielzahl unterschiedlicher Fragen beantwortet wird.“
Das MRI ist aber leider noch nicht im Stande die Computer Tomographie für die verschiedenen
Organgebiete vollständig zu ersetzten, da die CT das MRI durch ihre Auflösung noch klar übertrifft [9].
Mittels der MRI sind mehrere verschiedene Sichten auf das Herz möglich. Die fünf am meisten
verwendeten Sichten sind: die sagittale Ebene, die coronale Ebene, die axiale Ebene, die „long axis“Ebene and die „short axis“-Ebene. Von diesen fünf Ebenen gehört die sagittale Ebene, die coronale
Ebene und die axiale Ebene zu den klassischen Hauptebenen, während die „short axies“- und die “long
axies”-Ebene zu den Standardebenen des Herzens gehören [10]. Hierzu siehe Abbildung 8.
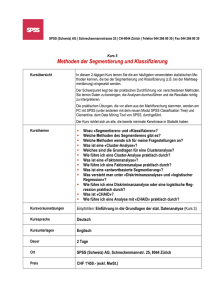
In Abbildung 9 wird ein vollständiger MRI-„short axis“ Scan eines Herzdatenzyklus in 100ms Schritten
gezeigt, wobei sich die Schnittebene in Höhe der beiden Ventrikel befindet. Der unterschiedliche
Füllungszustand der beiden Herzhöhlen ist hier gut erkennbar. Im Zustand 000 ms (Beginn der Systole)
14
sind die Ventrikel prall gefüllt, die sich während der Systole in den Kreislauf entleeren. Am Anfang der
Diastole (ca. 300 ms) beginnen sich die Ventrikel wieder über die Atrien zu füllen.
Abbildung 8: Die zwei linken Bilder zeigen eine MRI-Aufnahme des Herzens jeweils in der sagittalen
Ansicht. Die blauen Linien zeigen die verschiedenen Möglichkeiten der „short axis“-Ebene an, die
ausgewählt werden können. Durch den weißen Balken in den mittleren Bildern wird angezeigt, in was für
einer Ebene man sich gerade befindet. Im oberen mittleren Bild befindet man sich in der Schnittebene 8
(Höhe der Atrien), im unteren mittleren Bild befindet man sich in der Schnittebene 13 (Höhe der
Ventrikel). In den rechten Bildern wird dazu die entsprechende MRI-Aufnahme in der „short axis“-Ebene
abgebildet. [A3]
1
Truncus pulmonalis
2
Aorta
3
Atrium dextrum
4
Septum interatriale
5
Vena cava inferior
6
Anhang des Atrium sinistrum
7
Arteria coronaria sinistra
8
Venae pulmonales
9
Atrium sinistrum
10 Sulcus interventricularis anterior
11 Septum interventricularis
12 Ventriculus sinister
13 Ventriculus dexter
14 Pericardium
15
LV
LV
RV
RV
000 ms
100 ms
LV
LV
RV
RV
200 ms
300 ms
LV
LV
RV
RV
400 ms
500 ms
Abbildung 9: MRI „short axis“ Scans eines Herzdatenzyklus in 100ms Schritten in Höhe der Ventrikel.
Der Füllungszustand der beiden Ventrikel ist gut zu erkennen.
16
3.2 Datenquellen
Wie bereits erwähnt entstammen die zur Verfügung gestellten Daten der Kooperation des Institutes für
Biomedizinische Signalverarbeitung und Bildgebung (IBIA) aus der Privaten Universität für
Gesundheitswissenschaften, Medizinische Informatik und Technik (UMIT) und der Abteilung für
Kardiologie und der Abteilung für Radiologie I (beide gehören der Medizinischen Universität Innsbruck
an). Die Analyse basiert auf einer Zeitserie von EKG-getriggerten MRI “short-axis“ Scans des
menschlichen Herzens von vier gesunden männlichen Patienten (h_003, h_005, h_006, und h_007).
Tabelle 2 zeigt diese Daten im Detail.
ID
Geschlecht
Alter
(a)
Puls
(pro
min)
Zeitspanne
Pixelspacing
(ms)
(mm)
SchichtDicke
(mm)
Schicht
Schicht
[orginal]
[isotrop]
h_003
männlich
25
~ 70
0 - 567
1,5625
5
192x192x29
256x256x124
h_005
männlich
47
~ 68
0 - 670
1,5625
5
192x192x33
192x192x106
h_006
männlich
50
~ 58
0 - 720
1,5625
5
192x192x35
174x192x112
h_007
männlich
49
~ 64
0 - 672
1,5625
5
192x192x31
192x192x99
Tabelle 2: Die Daten im Detail.
3.3 Die Segmentierung
Ein wichtiges Gebiet in der Bildverarbeitung stellt die Segmentierung dar. Sie ist eine Methode der
Bildanalyse, mit dem Ziel ein Ausgangsbild zu erreichen, welches durch das Markieren von bestimmten
Gebieten oder durch das Abgrenzen von Gebilden das Eingangsbild beschreibt. Der Prozess bei dem
bestimmte Gebiete markiert oder abgegrenzt werden wird als Segmentierung bezeichnet. Die Einteilung
und Interpretation dieser Gebiete ist als Klassifikation zu benennen und kann eigentlich nicht streng von
der Segmentierung getrennt werden.
Kurz gesagt ist das Hauptziel der Bildanalyse die Lücke zwischen der „low-level“ Pixelinformationen und
der symbolischen Spezifizierung des Bildinhaltes zu schließen. Bis jetzt konnte dieses Ziel aber nur in
speziellen und klar definierten Bereichen erreicht werden. Zur globalen Bildanalyse ist es jedoch noch
ein langer Weg [1]. Die Abbildung 10 veranschaulicht dieses Problem.
17
Abbildung 10: Links das Originalbild und zwei Interpretationen der einzelnen Objekte des Bildes. [A4]
Das linke Originalbild kann auf zwei verschiedene Arten interpretiert werden. Für viele Menschen ist die
erste Interpretation am Geläufigsten, wobei die meisten Algorithmen für automatische Segmentierung als
Ergebnis die zweite Interpretation liefern würden, da sie nicht bestehendes Wissen zur Darstellung von
Bildsegmentationen verwenden. Die Fähigkeit bereits bestehendes Wissen für die automatische
Segmentierung einzusetzen befindet sich noch in der Entwicklungsphase. Zum Teil fließt jenes Wissen
bereits in viele Algorithmen ein [1].
Es sind viele Verfahren zur Segmentierung bekannt. Grundsätzlich kann die klassische Segmentierung
in folgende Methoden eingeteilt werden. Es gibt
•
die Pixel orientierten Methoden [11],
•
die Kanten basierenden Methoden [11],
•
die Regionen basierenden Methoden [11] und
•
die Segmentierung basierend auf Deformierbaren Modellen [11] .
Die Grenzen dieser Methoden sind aber oft fließend. So können auch verschiedene Verfahren
miteinander kombiniert werden um ein besseres Ergebnis zu erzielen.
18
3.3.1 Die Region-Growing- und Level-Set-Methode
Zwei spezielle Methoden der Segmentierung werden im folgenden Abschnitt noch etwas genauer
erläutert, da sie von den benutzen Softwareprogrammen, „amira 3.0“ und „I-PRESP“ zur
Segmentierung angewandt werden.
Region-Growing-Methode:
Ein besonders wichtiges Verfahren ist das „Region-Growing“ [12]. Hierbei wird ein Saatpunkt, also ein
Ausgangspunkt, in das zu segmentierende Gebiet gesetzt. Die so markierte Region wächst solange, bis
der Algorithmus auf eine vorgegebene Grenze im Bild stößt. Problematisch sind Grauwerte, die nicht
eindeutig einer Region zugewiesen werden können. Dadurch entstehen Lücken und es besteht die
Gefahr des Ausfließens.
Der Region-Growing-Algorithmus als Pseudo Code:
Auswahl des Saatpunktes x1: Manuell oder Automatisch
Füge Nachbarn in eine Liste
Leg den Saatpunkt x1 in die Menge A
Wiederhole bis Liste leer ist:
{
Sortiere Liste
Nehme das erste Pixel xi (größte Ähnlichkeit) von der Liste
Füge es der Menge A hinzu
Überprüfte Nachbarpixel auf Ähnlichkeit und füge diese gegebenenfalls zur Liste
Update den Mittelwert.
}
Unterschiedliche Methoden der Grenzensetzung können nur bedingt Abhilfe schaffen. Erhöhung der
Schwellwerte ermöglicht zwar eine Erkennung schwacher Übergänge, führt aber auch zu
Übersegmentierung. Die Bilder müssen vor der Segmentierung mit der Region-Growing-Methode oft zur
Rauschunterdrückung mit einem Gaußfilter geglättet werden. Dies führt bedauerlicherweise dazu, dass
auch die gesuchten Kanten nicht mehr so genau lokalisiert werden können [12].
Level-Set-Methode:
Die Level-Set Methode, ein Deformierbares Modell basierend auf einen geometrischen Ansatz, stellt ein
wichtiges Feld numerischer Methoden zur Kurven- und Flächenentwicklung dar. Eingeführt in den 80-er
Jahren von den amerikanischen Mathematikern Osher und Sethian, werden diese Methoden heute in
vielen Anwendungsgebieten, wie z.B. in der Bildverarbeitung eingesetzt [12].
19
Sie ist ein mathematisches Verfahren um geometrische Objekte und deren Bewegung numerisch zu
berechnen. Der Vorteil der Level-Set-Methode liegt darin, dass man Kurven und Oberflächen auf einem
räumlich festen (Euler’schen) Koordinatensystem berechnen kann, ohne Parametrisierung dieser
Objekte verwenden zu müssen. Insbesondere muss bei der Level-Set-Methode die Topologie, zum
Beispiel die Anzahl der zusammenhängenden Gebiete, nicht bekannt sein. Sie kann sich sogar während
der Berechnung ändern. Dies erlaubt die einfache Verfolgung der Ränder beweglicher Objekte, wie des
Herzens.
Das Prinzip:
Ein eindimensionaler Rand Γ (siehe Gleichung 1) wie es eine Kurve darstellt, wird bei der Level-Set
Methode als Nullstellenmenge ("level-set") einer zweidimensionalen Hilfsfunktion φ beschrieben.
Gleichung 1: Formel eines eindimensionalen Randes Γ. [A5]
Die Hilfsfunktion wird auf dem ganzen betrachteten Gebiet definiert, und zwar mit positiven Werten im
Inneren und negativen Werten im Äußeren des von Γ umschlossenen Gebiets. Bei einem zeitlich
veränderlichen Rand kann analog eine zeitabhängige Hilfsfunktion definiert werden. Bewegt sich solch
eine Kurve entlang ihrer Normalenrichtung mit einer Geschwindigkeit v, kann man diese Bewegung
mittels einer so genannten Hamilton-Jacobi-Gleichung (siehe Gleichung 2) für die Hilfsfunktion
darstellen.
Gleichung 2: Hamilton-Jacobi-Gleichung. [A5]
Diese Gleichung ist eine partielle Differentialgleichung und kann mit Hilfe von numerischen
Näherungsmethoden auf einem gleichmäßigen Gitter berechnet werden. Um die Kurve Γ zu
verschiedenen Zeitpunkten der Bewegung darzustellen, muss nun einfach die Nullstellenmenge der
Funktion φ verfolgt werden [13].
Die folgenden abgeleitenden Level-Set-Methoden werden im Programm „I-PRESP“ verwendet:
•
„Fast Marching Level Sets“-Methode [1]
•
„Active Geodesic Level Sets“-Methode [1]
Diese werden in der Master-Thesis von Dr. Karl Fritscher genauer beschrieben.
20
3.4 „amira 3.0“
„amira 3.0“
ist
ein
baukastenartiges,
objektorientiertes
Softwaresystem.
Seine
Basissystemkomponenten sind Module und Datenobjekte. Das Softwareprogramm bietet 120
verschiedene Module zum Vorverarbeiten bzw. Bearbeiten und Visualisieren von Datensätzen an.
Darüber hinaus werden auch Werkzeuge in einem speziellen Feature, welches „Image Segmentation
Editor“ genannt wird, für die interaktive Segmentierung von 2D und teilweise auch für 3D Bilder
angeboten. Neben der Palette an Segmentierungswerkzeugen für die manuelle Segmentierung gibt es
natürlich auch einige Werkzeuge für das automatische Segmentieren [14]. Was die Segmentierung
betrifft, so legt aber amira 3.0 seine Hauptaufmerksamkeit klar auf die manuelle Segmentierung. Hier
muss aber der User viel Zeit investieren, um ein gutes Resultat bei der Segmentierung zu erzielen [1].
3.4.1 Verwendete amira 3.0-Tools
Folgende Werkzeuge wurden bei der manuellen Segmentierung verwendet:
„Brush“
Sobald das Werkzeug aktiviert ist und die Größe des Pinsels im darunter liegenden Feld ausgewählt
wurde, kann man das ausgesuchte Gebilde markieren, indem man die dazugehörigen Voxel mit der
Maus bei gedrückter linker Maustaste einfach „anmalt“ [14].
Abbildung 11: Dieses Bild zeigt einen Ausschnitt aus dem „Image Segmentation Editor“. Hier sieht man
das „Tools“-Feld mit ausgewähltem „Brush“-Tool (linkes kleines Bild).
21
„Magic Wand“
Wenn der User mit der Maus bei aktivierter „Magic Wand“ auf ein Voxel fährt und die linke Maustaste
drückt, dann erscheint eine große zusammenhängende eingefärbte Fläche. Diese Fläche enthält nun
das angeklickte Voxel und alle weiteren Voxel, die einen Grauwert haben, der innerhalb der
eingegebenen Toleranzgrenze liegt (ähnlich dem „Region-Growing“-Verfahren). Die Auswahl der
Eingrenzung wird wieder im darunter liegenden Menüfeld angegeben. Normalerweise benutzt man
dieses Tool nur bei einem momentan ausgesuchten Bild. Wenn aber der 3D-Button im „Image
Segmentation Editor“ angeklickt ist, besteht auch die Möglichkeit alle angrenzenden Voxel des gesamten
3D Datensatzvolumens auf die Zugehörigkeit zu prüfen [14].
Abbildung 12: Dieses Bild zeigt einen Ausschnitt aus dem „Image Segmentation Editor“. Hier sieht man
das „Tools“-Feld mit ausgewähltem „Magic Wand“-Tool (linkes kleines Bild).
22
3.4.2 Manuelles Segmentieren mit amira 3.0
Zuerst muss der zu segmentierende Datensatz, eine Imagedatei, importiert werden. Um 3D Bilder
visualisieren zu können, ist es in meisten Fällen der gewöhnlichste und schnellste Weg aus dem 3D
Datensatz Orthogonalschnitte zu entnehmen. Dies ermöglicht das “OrthoSlice” Modul. So hat man die
Möglichkeit beliebige Orthogonalschnitte aus einem 3D Datensatz zu betrachten (siehe Abbildung 13).
Abbildung 13: Hier sieht man einen Screenshot der graphischen Benutzeroberfläche von amira 3.0.
Im linken Fenster ist ein axialer Orthogonalschnitt eines MRI Datensatzes zu sehen (Schicht 62).
Anschließend wird eine „LabelField“-Datei, die zur Segmentierung notwendig ist erzeugt und mit dem
bereits geladenen Datensatz verknüpft. Beim Aktivieren des „LabelField“-Buttons erscheint nun ein
weiteres Benutzerfenster. Der „Image Segmentation Editor“. In diesem Fenster ist nun das manuelle
Segmentieren möglich. Nach dem Aussuchen des gewünschten Werkzeuges, wie „Brush“ oder „Magic
Wand“ und dem Einstellen der dazu gehörigen Parameter, können nun die Herzkammern und die
großen zu- und ableitenden Gefäße einzeln und Schicht für Schicht segmentiert werden (siehe
Abbildung 14 und Abbildung 15). Um einen Herzdatensatz durch zu segmentieren, müssen bei einem
„Pixelspacing“ von ca. 1,56mm ca. 125 Schichten bearbeitetet werden.
23
Abbildung 14: Im linken Fenster ist der „Image Segmentation Editor“ zu sehen. Der mit dem Tool
„Brush“ segmentierte linke Ventrikel ist in Rot dargestellt (Schicht 62).
24
Abbildung 15: Das linke Fenster zeigt den „Image Segmentation Editor“. In dieser Schicht sind folgende
segmentierte Objekte zu sehen: in Blau der rechte Ventrikel, in Hellblau das rechte Atrium, in Gelb das
linke Atrium, in Orange die Aorta; (Schicht 33).
25
3.5 „I-PRESP“
Die IBIA-Preprocessing and Segmentation Pipeline, kurz genannt „I-PRESP“, ist das Ergebnis der
Masterarbeit von Herrn Dr. Karl Fritscher. Es stellt Werkzeuge zur Vorverarbeitung medizinischer
Bilddaten und Methoden zur automatischen Segmentierung von Strukturen zur Verfügung. Das
entwickelte Programm beinhaltet 22 Filter zur Bildvorverarbeitung, vier verschiedene Methoden zur
Bildsegmentierung, die auf „Geometric Deformable Models“ basieren und weitere Standardmethoden zur
2-dimensonalen oder 3-dimensionalen Bildbetrachtung [1].
3.5.1 Automatische Segmentierung mit I-PRESP
3.5.1.1 Vorverarbeitungsschritte
Die Medizinische Bildanalyse benötigt oft Vorverarbeitungsprozesse bei denen Filter verwendet werden,
welche das Rauschen entfernen. Dabei erreicht man auch klinisch wichtige Strukturen und
Abgrenzungen von Objekten. Dies kann zur Verbesserung der Leistung der nachträglichen
Weiterbearbeitung führen. Das Originalformat des Herzdatensatzes ist ein „RAW-Image“ Format und
muss zuerst in das Programm importiert und in ein ITK „Metaheader“ Format konvertiert werden.
Abbildung 16 zeigt ein „RAW-Image“ Format eines Herzdatensatzes.
Abbildung 16: Man sieht das „RAW-Image“ Format des Herzdatensatzes. Das linke Bild zeigt die axiale
Ansicht, in der Mitte ist die sagittale Ansicht und im rechten Bild die coronale Ansicht zu sehen. [A4]
LV
Linker Ventrikel
RV
Rechter Ventrikel
LA
Linkes Atrium
RA
Rechtes Atrium
AO
Aorta
26
Im nächsten Schritt wird die Bildgröße verändert. Dazu wird die „Region of Interest“ mit einem speziellen
Werkzeug aus dem gesamten Datensatz herausgeschnitten. Dies ist nicht unbedingt notwendig, bei
kleineren Datensätzen aber verlaufen die nachfolgenden Arbeitsschritte schneller ab. Anschließend
werden verschiedene Filter wie der Anisotropic Diffusion Filter (Raschunterdrückung), der GradientenFilter (Glättung), der Gauss-Filter und der Sigmoid-Filter (Kanten verstärken) verwendet. Damit werden
die Grauwerte des Bildes verändert, das nicht erwünschte Rauschen wird unterdrückt, das Bild geglättet
und die Kanten verstärkt. Anschließend erfolgt die eigentliche Segmentierung.
In Abbildung 17 und Abbildung 18 sieht man die Bearbeitung des Datensatzes mit den vorher genannten
Tools.
Abbildung 17: Die Bilder zeigen die herausbearbeitete „Region of Interest“, und die Verwendung des
Anisotropic Diffusion Filters. [A4]
Abbildung 18: Die Herz MR-Scans nach der Vorverarbeitung mit einem Gradienten– und Sigmoid-Filter.
[A4]
27
3.5.1.2 Der Segmentierungsprozess
Mit dem Segmentierungsprogramm I-PRESP wurde auf zwei unterschiedliche Arten segmentiert.
Einerseits wurden die Datensätze zuerst mit „Fast Marching Level Sets“ weiter vorbearbeitet und
schließlich mit „Active Geodesic Level Sets“ feinsegmentiert. Andererseits wurden Templates verwendet.
Diese dienten als Vorlage, von denen aus dann wieder mit „Active Geodesic Level Sets“ weiter
segmentiert wurde.
3.5.1.2.1 Die Segmentierung mit „Fast Marching Level Sets“ und „Active
Geodesic Level Sets“
In den 3 Hauptebenen werden zuerst Saatpunkte in der zu segmentierenden Herzkammer oder in zuoder ableitenden großen Gefäßen gesetzt. Anschließend wird der „Set Stopping Value“ Parameter
eingegeben, der den Filter reguliert und ihn nach einer gewissen Zeit stoppt. Erst danach wird die „Fast
Marching Level Sets“ Segmentierung gestartet (siehe Abbildung 19). Es ist zu bedenken, dass die
Saatpunkte gut gewählt werden müssen, da diese das Ergebnis des Algorithmus und in weiterer Folge
jenes der Feinsegmentierung maßgeblich beeinflussen.
Abbildung 19: Hier ein Beispiel für das Setzen der Saatpunkte im rechten Atrium in der axialen Ebene
(links) und im linken Ventrikel in der sagittalen Ebene (rechts). [A4]
28
Nach dem Erscheinen des Zwischenergebnisses wird in das „Active Geodesic Level Sets“-Menü
gewechselt, in welchem ebenfalls die folgenden Parameter gesetzt werden:
•
Iterations: Dieser Parameter gibt an, nach wie vielen Iterationen der Prozess stoppt [1].
•
Curve Scaling: Dieser Parameter reguliert die Krümmungs-Geschwindigkeit. Sie kontrolliert die
Form der Kontur und verhindert das Ausbrechen der aktiven Kontur, auch „Snake“ genannt, aus
den Objektgrenzen. Die Geschwindigkeit arbeitet nach innen hin und ist an einem bestimmten
Punkt proportional zur Krümmung der Snake [1].
•
Advection Scaling: Dieser Skalierungsparameter kontrolliert die Advections-Geschwindigkeit.
Er bewirkt, dass die Kontur verlangsamt bzw. stoppt wenn sie sich einer Grenze nähert. Die
Advection wird größer je mehr sich die Snake dem Bildrand parallel nähert [1].
•
Propagation Scaling: Mit diesem Parameter kann die Ausbreitungs-Geschwindigkeit der
Oberfläche reguliert werden. Sie ist proportional zum „feature image“, welches ein Bild nach den
Vorverarbeitungsschritten mit der Information über die Ausbreitung der Snake darstellt. Negative
Werte führen zu einer Expandierung der Kontur, während positive Werte eine Kontraktion
bewirken. In einer homogenen Region des „feature image“ ist die Propagation Scaling konstant
[1].
Schließlich wird der „Active Geodesic Level Sets“-Algorithmus gestartet. Als Ergebnis erscheint die
vollständige Segmentierung des ausgewählten Objektes. Abbildung 20 und Abbildung 21 zeigen solche
Resultate. Durch das Zusammenfügen der einzelnen segmentierten Label erhält man die gesamte
Oberfläche des Herzens. Hierzu siehe aber Kapitel 4.
Abbildung 20: Hier das Endresultat der Segmentierung des linken Ventrikel. [A4]
29
Abbildung 21: Hier ist das Endresultat der vier segmentierten Hohlräume des Herzens zu sehen. [A4]
3.5.1.2.2 Die Segmentierung unter Verwendung von Templates
Bei diesem Prozess basiert die Segmentierung hauptsächlich auf dem „Active Geodesic Level Sets“–
Modul.
Der erste Schritt ist wiederum, das Image zum Zeitpunkt 0 des Datensatzes in das Programm zu
importieren und zu konvertieren. Weiters wird das Bild mit den Vorverarbeitungsfiltern, wie in Abschnitt
3.5.1.1, bearbeitet. Anschließend werden die 4 Hohlräume des Herzens und die zu- und ableitenden
großen Gefäßen mit „Fast Marching Level Sets“- und dem „Active Geodesic Level Sets“-Algorithmus
segmentiert. Die daraus resultierenden segmentierten Label werden als Templates für das um 50 ms
darauf folgende Image des gleichen Datensatzes verwendet. Von diesen Templates aus wird dann
wieder mit „Active Geodesic Level Sets“ weiter segmentiert. Diese letzten zwei Schritte werden so oft
wiederholt bis schlussendlich der gesamte Herzzyklus segmentiert worden ist. Im Anschluss daran,
werden die einzelnen Label zusammen gefügt. Das Ergebnis stellt die pro Zeitabschnitt vollständig
segmentierte Oberfläche des Herzens dar. Auch hier siehe wieder Kapitel 4.
30
4 Ergebnisse
In diesem Kapitel werden nun die vollständig manuell und automatisch segmentierten Herzzyklen
präsentiert, Parametereinsstellung für die I-PRESP Segmentierung angegeben und ein quantitativer
Vergleich zwischen manueller und weitgehend automatischer Segmentierung angegeben.
4.1 Segmentierte Zyklen
4.1.1 amira 3.0 Zyklen
Hier wird ein vollständig manuell segmentierter Datensatz (h_003) gezeigt, der ausschließlich mit dem
Programm amira 3.0 bearbeitet worden ist. In der linken Spalte werden die segmentierten und
zusammengefügten 4 Hohlräume des Herzens und die zu- und ableitenden großen Gefäße zum
Zeitpunkt t gezeigt, in der mittleren Spalte ist der um 50 ms spätere Datensatz abgebildet. Die rechte
Spalte zeigt schließlich die Differenz ∆ der beiden Zustände, die sich aus den Distanzen der beiden
Segmentierungen errechnet. Die Regionen in Violett entsprechen dem Datensatz zum Zeitpunkt t, die
goldenen Regionen entsprechen den um 50 ms späteren Datensatz. Idente Regionen werden in Weiß
dargestellt. Ein Teil eines vollkommen segmentierten Datensatzes wird in Abbildung 22 dargestellt. Im
Anhang ist der gesamte segmentierte Datensatz zu sehen.
Zustand t
Zustand t + ∆
000 ms
200 ms
Differenz ∆
050 ms
250 ms
31
400 ms
450 ms
Abbildung 22: Die linke Spalte zeigt den Datensatz zum Zeitpunkt t, die mittlere Spalte zeigt den
gleichen Datensatz um 50 ms versetzt und die rechte Spalte zeigt schließlich die Differenz der beiden.
(bearbeiteter Datensatz h_003)
4.1.2 I-PRESP Zyklen
In diesem Abschnitt werden Datenzyklen (h_006), die mit dem Programm I-PRESP segmentiert worden
sind, mit den gleichen, aber mit amira 3.0 nachbearbeiteten Zyklen gegenübergestellt. Abbildung 23
zeigt den mit amira 3.0 segmentierten Datensatz zum Zeitpunkt 0 was die R-Zacke im
Elektrokardiogramm entspricht. Von diesem Datensatz aus wurde einerseits mit „Fast Marching Level
Sets“ und „Active Geodesic Level Sets“ (siehe Abbildung 24) oder andererseits unter der Verwendung
von Templates (siehe Abbildung 25) weitersegmentiert. Die Regionen in Violett entsprechen den
Überlagerungen des ersten Datensatzes, die goldenen Regionen entsprechen den Überlagerungen des
zweiten Datensatzes (mit amira 3.0 segmentiert). Idente Regionen werden in Weiß dargestellt. Im
Anhang sind die zwei vollständig segmentierten Datensätze zu sehen.
000 ms
Abbildung 23: Mit amira 3.0 segmentierter Datensatz (h_006) zum Zeitpunkt 0.
32
Segmentierung mit „Fast
Marching Level Sets“ und
Segmentierung mit
„Active Geodesic Level
amira 3.0
Differenz ∆ von frontal
Differenz ∆ von seitlich
hinten
Sets“
050 ms
350 ms
600 ms
050 ms
350 ms
600 ms
Abbildung 24: Im der linken Spalte sieht man einen segmentierten Datensatz, der mit dem „Fast
Marching Level Sets“- und dem „Active Geodesic Level Sets“-Algorithmus bearbeitet wurde. Die zweite
linke Spalte zeigt den gleichen Datensatz, der schließlich manuell mit amira 3.0 weiterbearbeitet
wurde. Die Differenz der beiden Datensätze wird in der rechten Spalten wiedergegeben, einerseits von
frontal gesehen andererseits von links hinten gesehen. (bearbeiteter Datensatz h_006)
33
Segmentierung unter der
Verwendung von
Templates
Segmentierung mit
amira 3.0
050 ms
050 ms
350 ms
350 ms
600 ms
Differenz ∆ von frontal
Differenz ∆ von seitlich
hinten
600 ms
Abbildung 25: Hier sieht man in der linken Spalte einen Datensatz der unter der Verwendung von
Templates segmentiert worden ist. In der zweiten Spalte wiederum die mit amira 3.0 weiterbearbeitete
Segmentierung und in den beiden rechten Spalten die Differenz (einerseits von frontal gesehen
andererseits von links hinten gesehen). (bearbeiteter Datensatz h_006)
34
4.2 Parametereinstellungen
In diesem Abschnitt soll gezeigt werden wie die Filter und Parameter, die unter anderem in Kapitel 3
besprochen wurden, gesetzt worden sind. Als Beispiel dient hier der Datensatz “h_006“ (100ms nach der
R-Zacke des Elektrokardiogramms), der mit I-PRESP unter der Verwendung von Templates bearbeitet
worden ist. Siehe Tabelle 3. Ähnliche Parametersetzungen wurden auch für die Datensätze „h_005“ und
„h_007“ herangezogen.
Gradient +
Glättung
(Sigma)
Linker
Ventrikel
Rechter
Ventrikel
Linkes
Atrium
Rechtes
Atrium
Aorta
Truncus
Pulmonalis
1
1
1
1
1
1
Set
Set
Advection
Propagation
Scaling
Scaling
2,0
3,0
2,5
20
2,0
3,0
2,5
15
2,0
3,0
-2,0
11
2,0
3,0
-3,5
11
2,0
3,0
-2,0
0
0
0
0
Sigmoid
Stopping
Set Curve
Filter
Value
Scaling
20
α: -40
β: 97
α: -40
β: 97
α: -40
β: 97
α: -40
β: 97
α: -40
β: 97
α: -40
β: 97
Tabelle 3: Setzung der Parameter.
35
4.3 Quantitativer Vergleich mit „Similarity Match“
Die folgende Tabelle zeigt einen quantitativen Vergleich der Ergebnisse des Datensatzes „h_006“ bei
Saatpunktsetzung und Templateverwendung in Bezug auf den „Golden Standard“ (manuelles
Segmentieren). Der „Similarity Index“ wurde mit dem Programm I-PRESP errechnet und spiegelt
prozentuell den Vergleich der Ergebnisse wieder. Einerseits wurden die Segmentationen, die mit dem
„Fast Marching Level Sets“- und dem „Active Geodesic Level Sets“-Algorithmus bearbeitet wurden mit
den amira 3.0 nachbearbeiteten Bildern verglichen (siehe mittlere Spalte in Tabelle 4), andererseits
wurden die Datensätze, die unter Anwendung von Templates entstanden sind mit den amira 3.0
nachbearbeiteten Bildern verglichen (siehe rechte Spalte in Tabelle 4). Die linke Spalte gibt den
Zeitpunkt des Datensatzes an.
Similarity Index
Similarity Index
(bei Saatpunktsetzung)
(bei Templateverwendung)
050
0,907
0,989
100
0,913
0,958
150
0,903
0,930
200
0,903
0,921
250
0,916
0,924
300
0,921
0,910
350
0,933
0,961
400
0,932
0,980
450
0,924
0,977
500
0,923
0,976
550
0,926
0,983
600
0,919
0,987
650
0,919
0,987
700
0,914
0,987
Mittelwert m
0,918
0,962
Standardabweichung δ
0,0095
0,0286
Zeitpunkt t
Tabelle 4: Quantitativer prozentueller Vergleich mit „Similarity Match“.
Im Mittel ergibt sich ein Wert von 0,918 (δ = 0,0095) für den „Similarity Index“ bei der Saatpunktsetzung.
Bei der Templateverwendung beträgt der Mittelwert 0,962 (δ = 0,0286). Siehe hier ebenfalls Tabelle 4.
36
4.4 Weitere Ergebnisse
Während der Zeitaufwand für die Segmentierung eines gesamten Herzdatensatzes über den Zyklus mit
amira 3.0 ca. eine Woche beträgt, ist der Segmentierungszeitaufwand mit dem Programm I-PRESP
wesentlich geringer. Bei der Saatpunktsetzung benötigt man ca. drei Tage und bei der Verwendung von
Templates ca. zwei Tage.
Die Einarbeitungszeit für amira 3.0 beträgt ca. eine Woche und wird durch die Verwendung eines UserGuides beschleunigt. Hingegen bei dem Programm I-PRESP bedarf es einer wesentlich längeren Zeit für
die
Einarbeitung,
einerseits
durch
das
Pipeline
Prinzip,
andererseits
durch
ergänzendes
Literaturstudium.
Beim Softwaredesign war amira 3.0 standardmäßig ausgereift. Bei I-PRESP hingegen konnte klar
festgestellt werden, dass es sich hier noch um einen Prototyp handelt.
37
5 Diskussion
In diesem Kapitel werden die gewonnenen Ergebnisse diskutiert und Verbesserungsvorschläge für den
I-PRESP Prototypen eingebracht. Eine allgemeine Zusammenfassung rundet dieses Kapitel ab.
5.1 Segmentierte Zyklen
5.1.1 amira 3.0
Allgemein:
amira ist ein in der Bildverarbeitung häufig verwendetes Programm, das mittlerweile in der Version
3.01 vorliegt. Da ich das Programm nur über eine kurze Zeit für das manuelle Segmentieren verwendet
habe, konnte ich jedoch nicht das ganze Softwareprodukt im Detail kennen lernen.
Mit dieser Software wurde einerseits der Datensatz „h_003“ vollständig segmentiert, andererseits wurde
es zur Nachbearbeitung der mit I-PRESP segmentierten Datensätze „h_005“, „h_006“ und „h_007“
verwendet.
Nachteilig erwies sich diese Methode als nicht objektiv, da jeder User subjektiv die Übergänge und
Abgrenzungen der einzelnen Herzkompartimente festlegt. Dies ist natürlich auch durch den
verminderten Kontrast in der Herzventilebene bedingt. So kann es sein, dass die Lage der
Herzventilebene am gleichen Objekt von verschiedenen Benutzern unterschiedlichen Schichten
zugeordnet wird.
Durch die Differenzen, die durch die Gegenüberstellungen bestimmter Zustände entstehen, werden die
Bewegungen des Herzens, sprich das Füllen und das Leeren der Atrien und Ventrikel deutlich
vorgezeigt. Auch wenn man die MRI-Aufnahmen in der „short axis“-Ebene nebeneinander stellt, sind die
systolischen und diastolischen Bewegungen gut sichtbar (siehe Abbildung 9).
Effizienz:
Die Effizienz läst aber zu wünschen übrig, denn das manuelle Segmentieren nahm sehr viel Zeit in
Anspruch, wobei man dafür aber ein sehr exaktes Ergebnis des gewünschten Objektes erhielt. Pro
Zustand benötigte man ca. 7 Stunden, dies erfordert dann ca. 100 Stunden für die vollständige
Segmentierung eines Zyklus.
Softwaredesign:
Mir erschien es als sehr benutzerfreundlich und mit dem User-Guide schnell und einfach zu verstehen.
Dennoch sind mir wenige Kleinigkeiten bei der Benutzung aufgefallen, wie zum Beispiel das Umordnen
der Objektregistrierungen im „Materials“-Ordner des „Image Segmentation Editor“. Dies war leider nicht
möglich. So musste man vorhandene Objektregistrierungen löschen und diese dann in der gewünschten
Reihenfolge wieder einfügen.
38
Im Großen und Ganzen denke ich, dass amira 3.0 ein sehr gutes Softwareprodukt für den ersten
Einstieg in die Bildverarbeitung ist. Im Speziellen für die manuelle Segmentierung und für die 3D
Darstellung von Objekten.
5.1.2 I-PRESP
Allgemein:
Das Programm IBIA-Preprocessing and Segmentation Pipeline kurz „I-PRESP“ genannt, ist eine
weitgehende automatische Segmentierungs-Pipeline von Dr. Karl Fritscher. Da dieses Programm erst
vor kurzem an der IBIA entwickelt worden ist, war ich einer der Ersten der die Möglichkeit hatte dieses
neue Programm zu testen und zu verwenden. Ein großer Vorteil war hierbei, dass evtl. Fehler im
Programm sofort behoben wurden oder eingebrachte Verbesserungsvorschläge direkt umgesetzt
wurden.
Wie bereits in Kapitel 4 erwähnt, wurde mit diesem Programm auf zwei Arten automatisch segmentiert.
Einerseits wurde mit „Fast Marching Level Sets“ und „Active Geodesic Level Sets“ und andererseits
unter der Verwendung von Templates segmentiert.
Zur ersten Methode ist zu sagen, dass der User hier viel Vorwissen über die Anatomie des Herzens und
über die Funktion der Saatpunkte haben muss, da das Ergebnis stark von der Setzung jener Saatpunkt
in den einzelnen Hohlräumen abhängt. Denn je präziser er diese Punkte setzt, desto bessere
Zwischenergebnisse werden durch die Vorverarbeitung erreicht und desto schneller ist die weitere
Feinsegmentierung mittels der „Active Geodesic Level Sets“-Methode.
Die Verwendung von Templates bei der Segmentierung ist meiner Meinung nach die einfachste und
schnellste Methode einen vollständigen Zyklus zu segmentierten.
Effizienz:
Hier ist klar zu beobachten, dass mit der weitgehenden automatischen Segmentierungs-Pipeline
wesentlich schneller segmentiert werden kann, als mit der manuellen Segmentierungsmethode. Man
benötigt hier ein Drittel der Zeit (Reduktion von 100 Stunden auf ca. 30 Stunden), die man für das
manuelle Segmentieren braucht.
Softwaredesign:
In den folgenden Punkten werden Nachteile aufgezählt, die mir bei der Benutzung dieses Programms
aufgefallen sind. Im anschließenden Absatz werden zu einigen angeführten Punkten Verbesserungen
vorgeschlagen:
a) Der erste Punkt betrifft die verschiedenen Eingabefenster die zahlreich in diesem Programm
vorkommen. Sie sind zu klein geraten, sodass der Benützter oft in ein solches Fenster
reinklicken und den Cursor benutzten muss, wenn er den gesamten Eingabewert kontrollieren
39
will. Wird aber der Cursor zu weit nach links bewegt, bleibt dieser nicht in diesem Fenster,
sondern wandert zum Eingabefenster im nächsten links gelegenen Menü.
b) Im User-Interface wird nicht anzeigt, was für eine Datei gerade bearbeitet wird oder gerade
geladen wurde.
c) Bei der manuellen Segmentierung mit „I-PRESP“, müssen die „Paint Level“- und „Delete“Werkzeuge immer vor dem Verlassen des Menüs manuell deaktiviert werden. Geschieht dies
nicht, wird in einem anderen Menü bei der Betätigung der Maus weitergezeichnet oder
weitergelöscht.
d) Bei der Verwendung von „Combine Files“: Falls man sich beim Zuordnen der Hohlräume
verklickt, kann man dies nicht mehr korrigieren oder den Prozess abbrechen, sondern muss den
ganzen „Combine Files“ Prozess durchlaufen, damit man wieder zum gewünschten Anfang
kommt.
e) Auch beim Speichern sind mir kleinere Probleme aufgefallen. Beim Abspeichern einer Datei,
kann es durchaus vorkommen, dass bereits eine Datei mit demselben Namen existiert und diese
dann ohne Vorwarnung überschrieben wird. Eine weitere Schwachstelle auf diesem Gebiet ist,
dass Dateien nur mit den Endungen „.img“ oder „.hdr“ abgespeichert werden können. Versucht
man ein File mit einer anderen Endung abzuspeichern, wird dieses ohne Anmerkung überhaupt
nicht gespeichert.
f)
Wenn ich im schon geöffneten Programm neue Daten laden will, werden die Einstellungen in
allen Eingabefenster, die ich zuvor benutzt habe nicht auf einen „Defaultwerte“ zurückgesetzt
sondern bleiben bestehen.
g) Die „Opacity“ Einstellung muss nach jedem Segmentierungsschritt wieder aktiviert werden. Der
Wert in der „Opacity“-Einstellung (z.B.: 0,25) bleibt zwar gleich, nur ist jene Funktion nicht aktiv.
h) Wenn man sich im „Level Sets“-Menü befindet und auf „Show Source Image“ klickt, dann
verschwindet plötzlich das Overlay. Erst durch wiederholtes Anklicken vom „View Overlay“Button erscheint jenes dann wieder.
i)
Eine weiteres Problem ergibt sich bei der Benutzung der „Reset“- und „Update“-Taste: Bei der
Verwendung des Sigmoid-Filters werden zuerst die gewünschten Einstellungen gesetzt. Nun
führe ich die Filter aus und erhalte ein bearbeitetes Bild. Da mir aber das gerade erschienene
Bild nicht gefällt, benützte ich deshalb die „Reset“-Taste um auf das vorherige Bild wieder zurück
40
zu kommen. Das Ursprungsbild erscheit erneut und ich möchte jenes weiterbearbeiten. Aus
diesem Grund drücke ich die „Update“-Taste. Nun wird aber das Bild wiederholt verändert, und
zwar mit den Werten die noch im Eingabefenster stehen. Doch nun ist es nicht mehr möglich die
„Reset“-Taste zu benützen, da schon die „Update“-Taste gedrückt wurde und somit das vorher
bearbeitete Bild bereits abgespeichert wurde.
Verbesserungsvorschläge:
ad a): Alle Eingabefenster sollten vergrößert werden und der Cursor sollte nur mehr die Möglichkeit
haben sich in einen Eingabefenster zu bewegen.
ad b):
Es sollte in jedem User-Interface im linken oberen Rand ein kleines Fenster erscheinen, das den
Namen der gerade bearbeitenden Datei einblendet.
ad c):
Bei der manuellen Segmentierung mit „I-PRESP“, sollten sich die „Paint Level“- und „Delete“Werkzeuge beim Verlassen des Menüs automatisch deaktivieren.
ad d):
Eine „Cancel“-Taste wäre in Menü bei der Benützung des „Combine Files“-Prozesses sehr
sinnvoll. Das Betätigen dieser Taste sollte entweder den ganzen Prozess abbrechen oder auf
die Defaulteinstellung zurücksetzten. So muss nicht der gesamte Prozess durchlaufen werden.
ad e):
Im Falle der Überspeicherung sollte der User sofort gewarnt werden. Ein Fenster sollte sich
öffnen und den User nochmals informieren, dass er dabei ist die bereits bestehende Datei zu
überschreiben. Weiters soll der User gewarnt werden falls er eine Datei mit einer unberechtigten
Endung speichert will.
5.2 Parametereinstellungen
Durch verschiedene Tests in der Einarbeitungsphase wurden die Einstellungen der besprochenen
Parameter im Programm I-PRESP ermittelt und notiert. Die förderlichsten Einstellungen wurden
herausgefiltert und schließlich für das Segmentieren verwendet. Während der Segmentierung der
Datensätze änderte sich der Großteil der Einflussgrößen kaum oder gar nicht. Nur die „Stopping Value“Einstellung der Iterationen differenzierte stark, da sie von der Art des zu segmentierten Objektes
abhängig ist.
41
5.3 Similarity Match
Die Qualität der Ergebnisse, bedingt durch die beiden Segmentierungsmethoden, ist nicht mit jener
Qualität der manuellen Segmentierung zu vergleichen. Es ist klar ersichtlich, dass die beiden Arten
teilweise sehr unsauber segmentieren und nicht ins Detail eingehen können. Bei beiden
Segmentierungsmethoden zeigt die Differenz auch deutlich, dass eine manuelle Nachsegmentierung
unbedingt notwenig ist, um ein annähernd perfektes Endergebnis zu erhalten.
Weiters kann man aber dennoch festzustellen, dass I-PRESP unter Verwendung von Templates
genauere Ergebnisse liefert als mit der Setzung von Saatpunkten.
5.4 Allgemeine Zusammenfassung
Die Zielsetzung wurde im Großen und Ganzen abgearbeitet, die gewonnenen Ergebnisse präsentiert
und diskutiert. Hier wurde schließlich klar festgestellt, dass die manuelle Segmentierung mittels
amira 3.0 zwar genauere Resultate liefert, aber der Zeitaufwand wesentlich höher ist als wenn man mit
dem weitgehend automatischen Programm I-PRESP segmentieren würde. Ob eine detailtreue
Segmentierung oder eine zeitlich erheblich verkürzte, mindergetreue Darstellung zum Zug kommt, hängt
schließlich von einer weiteren Zielsetzung ab.
Meiner Meinung nach war es eine sehr interessante Bachelorarbeit, da ich so zwei Arten der
Segmentation genauer kennen lernen und schließlich mittels zweier unterschiedlicher Softwareprodukte
MRI-Datensätze
des menschlichen Herzens bearbeiten konnte. Dies war aber auch eine
Herausforderung für mich, da ich ja gleichzeitig auch noch ein neues Programm, nämlich „I-PRESP“
testete und evt. Verbesserungsvorschläge einbringen konnte.
Ich hoffe, dass diese Bachelorarbeit als Basis für weitere Arbeiten dienen kann und noch weitere
Motivation liefert.
42
6 Zusammenfassung
Das Herz ist der zentrale Motor des menschlichen Körpers und viele Krankheiten stehen mit diesem
Organ im Zusammenhang. So stellt es ein interessantes und herausforderndes Organ für eine
Verbesserung in der nicht-invasiven Diagnostik - im Speziellen der medizinischen Bildgebung - dar, um
vermeintliche Schäden am Herzen frühzeitig erkennen und bekämpfen zu können.
Ein Hauptproblem ist dabei nach wie vor die zeitlich optimierte Extraktion von komplexen anatomischen
Entitäten, wie z.B. den Kammern, den Vorhöfen, oder den Gefäßabgängen, die für weitere Analysen
wichtig sind. Solche Segmentierungsalgorithmen sollen nicht nur robust, sondern gleichzeitig auch
flexibel sein.
Das Ziel dieser Bachelorarbeit war es daher, zwei grundsätzliche Arten von Segmentierungsmethoden,
einerseits das manuelle Segmentieren, andererseits das weitgehend automatische Segmentieren mittels
der Level-Sets (mit und ohne Template), und zusätzlicher manueller Nachkorrektur experimentell
gegenüberzustellen und Erfahrungen für die weitere Softwareentwicklung zu sammeln.
Für die manuelle Segmentierung wurde die Software „amira 3.0“ und für die weitgehend automatische
Segmentierung das Programm „I-PRESP“, entwickelt am Institut für Biomedizinische Bildanalyse (IBIA)
an der UMIT, verwendet. Die Eigenschaften beider Softwarepakete werden untersucht und deren
Anwendung auf Herzdaten erklärt.
Die Datensätze, die bearbeitet werden, basieren auf einer Zeitserie von EKG-getriggerten
Magnetresonanztomographie “short-axis“ Scans des menschlichen Herzens von vier gesunden
männlichen Probanden im Alter zwischen 25 und 50 Jahren. Diese Zyklen beginnen mit der R-Zacke (0
ms) des Elektrokardiogramms und repräsentieren nahezu den gesamten Herzzyklus in 50 ms Schritten.
So erhält man insgesamt ca. 14 segmentierte Herzen pro Zyklus, bei einem Pulsschlag von ca. 70
Schlägen pro Minute.
Die Ergebnisse bestehen aus vollständig segmentierten Zyklen, die mit „amira 3.0“ oder mit „I-PRESP“
bearbeitet bzw. nachbearbeitet worden sind. Die Parametereinstellungen, der quantitative Vergleich der
unterschiedlichen Methoden und ihre Effizienz werden präsentiert und diskutiert.
Schlussendlich kann man sagen, dass bei der manuellen Segmentierung das Ergebnis zwar exakter ist,
jedoch der Zeitaufwand, der dafür benötigt wird, dreimal so hoch ist als bei der weitgehend
automatischen Segmentierung.
Für die zukünftige weitere Verbesserung der Segmentierung haben sich durch diese Arbeit viel
versprechende Ansatzpunkte gezeigt. Insbesondere die Einbeziehung von Modellwissen in den
Segmentierungsprozess soll in nächster Zukunft untersucht werden.
43
7 Abstract
The heart is the driving engine of the human body and many diseases of the cardiovascular system are
closely related to the organ. It is of main importance to recognize possible dysfunctions and defects of
organs. Thus the heart represents an extraordinary interesting and challenging organ - respectively in
non-invasive diagnostics, which implies the area of medical imaging.
Still a main problem is the optimized extraction of complex anatomical entities, as e.g. ventricles, atria
and initial parts of vessel, which is a prerequisite for further analysis. Such segmentation algorithms
require being robust and flexible.
A main topic of this bachelor work was to test two basic segmentation methods, especially manual
segmentation, automatic segmentation using different forms of level-sets (with and without templates)
including manual correction, to compare them and collect experience for further software developments.
For manual segmentation the „amira 3.0“ software, and for the automatic segmentation the “I-PRESP”
program, developed at the Institute of Biomedical Imaging (IBIA) at the UMIT was used. User specific
information is provided in this work.
The work is based on electrocardiogram triggered short axis MRI data sets of four healthy male
volunteers at the age of 25 to 50 years. A time step of 50 ms between each volume data set led to about
14 different models along each cardiac cycle at a pulse of about 70 beats / minute.
The result consists of completed segmented cycles, done either with „amira 3.0“, or “I-PRESP” or a
combination of both. Parameter settings are given, a quantitative comparison of the different methods is
provided, and the efficiency is presented and discussed.
To summarize, the manual segmentation is more accurate, but it is a very time consuming process too
(consumes about 3 times as much as using the automatic pipeline).
This work provides a good basis for future investigations. Incorporating model knowledge in the
segmentation process should be one of the next steps to be validated.
44
8 Danksagung
Diese Arbeit entstand am Institut für Biomedizinische Bildanalyse der Privaten Universität für
Gesundheitswissenschaften, Medizinische Informatik und Technik (UMIT).
Ich möchte mich besonders bei meinen lieben Eltern bedanken, die mir dieses Studium ermöglicht und
mich in meinem Werdegang immer unterstützt haben.
Mein Dank gilt Herrn o. Univ. Prof. Dr. Rainer Schubert, der mir die Möglichkeit gab meine
Bachelorarbeit an seinem Institut durchzuführen.
Weiters möchte ich mich bei Herrn Dr. Karl Fritscher bedanken, der mir bei Fragen zu seiner Software “IPRESP“ sehr entgegen kam.
Mein aufrichtiger Dank gilt vor allem Herrn Univ. Ass. DI Dr. Roland Pilgram, der mir dieses Thema
ermöglichte und die Rolle des Betreuers übernahm. Neben seinen beruflichen und familiären
Verpflichtungen fand er während der vergangenen Monate stets Zeit, mir mit Rat und Geduld hilfreich
zur Seite zu stehen.
45
9 Curriculum vitae
Johannes Guido Holzmeister
Brennerstr. 68
A-6150 Steinach am Brenner
Tel.: +43 676/ 6113662
Email: [email protected]
Persönliche Angaben
Geburtsdatum:
08.06.1977
Geburtsort:
Innsbruck
Familienstand:
ledig
Staatsbürgerschaft:
Österreich
Eltern:
Dr. Univ. med. Hannes Holzmeister, Arzt für Allgemeinmedizin
Marion Holzmeister, Radiologisch-technische Assistentin
Ausbildung
1983 – 1987
Volksschule: Steinach am Brenner
1987 – 1991
Hauptschule: Steinach am Brenner
1991 – 1997
Gymnasium: Werkschulheim Felbertal bei Salzburg
1996
Gesellenprüfung im Tischler-Handwerk
1997
Matura
1997 – 2001
Studium der Humanmedizin an der Leopold-Franzens-Universität
Innsbruck
seit Oktober 2001
Bachelor-Studium der Medizinischen Informatik an der Privaten
Universität für Gesundheitswissenschaften und Medizinische Informatik
und Technik Tirol (UMIT)
Studienbegleitende Tätigkeiten
08/ 1998
Praktikum in der Ordination Dr. Hannes Holzmeister
07/ 1999
Famulatur an der Universitätsklinik für Neurochirurgie Innsbruck
08/ 2000
Praktikum in der Ordination Dr. Hannes Holzmeister
01/ 2003
Praktikum im Zentrum für „Medizin und Labortechnik“ und dem
„Technischen Servicezentrum“
09/ 2003
Praktikum in der Firma „bm-websolutions“
46
10 Literaturverzeichnis
[1] Fritscher K. D.; Development of software framework for preprocessing and level-set segmentation of
medical image data; Innsbruck; Master-Thesis; 2004;
[2] Frangi A. et al.; Three-dimensional modeling for functional analysis of cardiac images: A review; IEEE
Trans. Med. Imag. 20 (1); 2001;
[3] Frangi A. et al.; Automatic construction of mutiple-object three-dimensional statistical shape models:
Applications to cardiac modeling; IEEE Trans. Med. Imag. 21 (9); 2002;
[4] Lötjönen J. et al.; Four-chamber statistical 3-D heart model from short-axis and long-axis MR images;
In: Ellis R. et al., Medical Image Computing and Computer-Assisted Intervention – MICCAI; Lecture
Notes in Computer Science, vol. 2878; Springer, Berlin; 2003;
[5] Leonhardt H. et al.; Taschenatlas der Anatomie, Band 2: Innere Organe; Georg Thieme Verlag
Stuttgart, New York, Deutscher Taschenbuch Verlag; 6. überarbeitete Auflage; 1991;
[6] Schiebler T. et al.; Anatomie; Springer-Verlag Berlin Heidelberg New York; 5. korrigierte Auflage;
1991;
[7] Menche N. et al.; Biologie Anatomie Physiologie; Urban & Fischer Verlag München Jena; 5.,
überarbeitete Auflage; 2003;
[8] Silbernagl St. et al.; Taschenatlas der Physiologie; Georg Thieme Verlag Stuttgart, New York,
Deutscher Taschenbuch Verlag; 5. komplett überarbeitetet und neu gestaltete Auflage; 2001;
[9] Kauffmann G. W. et al.; Radiologie; Urban & Fischer Verlag München Jena; 2., erweiterte Auflage;
2001;
[10] Thrupp St. et al.; Cardiac MRI Anatomical Atlas;
http://www.scmr.org/education/atlas/intro/cardiac.htm; 2001; letzter Zugriff: 20.09.2004;
[11] Sonka M. et al.; Handbook of Medical Imaging; Volume 2.; Medical Image Processing & Analysis;
Spie Pres, Washington, USA; 2000;
47
[12] Adams R. et al.; Seeded Region Growing; IEEE Transaction on Pattern Analysis and Machine
Intelligence Vol. 16 (6); 1994;
[13] Wikipedia Foundation Inc.; Wikipedia, Die freie Enzyklopädie;
http://de.wikipedia.org/wiki/Level-Set-Methode; 2004; letzter Zugriff: 15.10.2004;
[14] amira 3.0; http://www.amiravis.com; Mercury Computer Systems; Berlin, 1999-2004 ZIB; letzter
Zugriff: 05.10.2004;
11 Bildquellen
[A1] Leonhardt H. et al.; Taschenatlas der Anatomie, Band 2: Innere Organe; Georg Thieme Verlag
Stuttgart, New York, Deutscher Taschenbuch Verlag; 6. überarbeitete Auflage; 1991;
[A2] Menche N. et al.; Biologie Anatomie Physiologie; Urban & Fischer Verlag München Jena; 5.,
überarbeitete Auflage; 2003;
[A3] Thrupp St. et al.; Cardiac MRI Anatomical Atlas;
http://www.scmr.org/education/atlas/intro/cardiac.htm; 2001; letzter Zugriff: 20.09.2004;
[A4] Fritscher K. D.; Development of software framework for preprocessing and level-set segmentation of
medical image data; Innsbruck; Master-Thesis; 2004;
[A5] Wikipedia Foundation Inc.; Wikipedia, Die freie Enzyklopädie;
http://de.wikipedia.org/wiki/Level-Set-Methode; 2004; letzter Zugriff: 15.10.2004;
48
12 Appendix
Darstellung des mit amira 3.0 vollständig manuell segmentierten Datensatzes (h_003). In der linken
Spalte werden die segmentierten und zusammen gefügten 4 Hohlräume des Herzens und die zu- und
ableitenden großen Gefäßen zum Zeitpunkt t gezeigt, in der mittleren Spalte ist der um 50 ms spätere
Datensatz abgebildet. Die rechte Spalte zeigt schließlich die Differenz ∆ der beiden Zustände, die sich
aus den Distanzen der beiden Segmentierungen errechnet. Die Regionen in Violett entsprechen dem
Datensatz zum Zeitpunkt t, die goldenen Regionen entsprechen den um 50 ms späteren Datensatz.
Idente Regionen werden in Weiß dargestellt.
Datensatz „h_003“ mit amira 3.0 segmentiert:
Zustand t
Zustand t + ∆
Differenz ∆
000 ms
050 ms
050 ms
100 ms
100 ms
150 ms
49
150 ms
200 ms
200 ms
250 ms
250 ms
300 ms
300 ms
350 ms
350 ms
400 ms
50
400 ms
450 ms
450 ms
500 ms
500 ms
550 ms
51
Hier werden Datensatzzyklen (h_006), die mit dem Programm I-PRESP segmentiert worden sind, mit
den gleichen, aber mit amira 3.0 nachbearbeiteten Zyklen gegenübergestellt. Der erste Datensatz
wurde mit „Fast Marching Level Sets“ und „Active Geodesic Level Sets“ segmentiert, der zweite
Datensatz wurde unter der Verwendung von Templates segmentiert. Die Regionen in Violett
entsprechen den Überlagerungen des ersten Datensatzes, die goldenen Regionen entsprechen den
Überlagerungen des zweiten Datensatzes (mit amira 3.0 segmentiert). Idente Regionen werden in
Weiß dargestellt.
Datensatz „h_006“ mit „Fast Marching Level Sets“ und „Active Geodesic Level Sets“
segmentiert:
Segmentierung mit „Fast
Marching Level Sets“ und
Segmentierung mit
„Active Geodesic Level
amira 3.0
Differenz ∆ von frontal
Differenz ∆ von seitlich
hinten
Sets“
050 ms
050 ms
100 ms
100 ms
150 ms
150 ms
52
200 ms
200 ms
250 ms
250 ms
300 ms
300 ms
350 ms
350 ms
400 ms
450 ms
400 ms
450 ms
53
500 ms
500 ms
550 ms
550 ms
600 ms
650 ms
700 ms
600 ms
650 ms
700 ms
54
Datensatz „h_006“ unter der Verwendung von Templates segmentiert:
Segmentierung unter der
Verwendung von
Templates
050 ms
100 ms
Segmentierung mit
amira 3.0
Differenz ∆ von frontal
Differenz ∆ von seitlich
hinten
050 ms
100 ms
150 ms
150 ms
200 ms
200 ms
250 ms
250 ms
55
300 ms
300 ms
350 ms
350 ms
400 ms
400 ms
450 ms
450 ms
500 ms
500 ms
550 ms
550 ms
56
600 ms
650 ms
700 ms
600 ms
650 ms
700 ms
57
Hiermit erkläre ich an Eides statt, die Arbeit selbständig verfasst und keine anderen als die angegebenen
Hilfsmittel verwendet zu haben.
Ort, Datum
Unterschrift
58