2. Woche - ITP, TU Berlin
Werbung

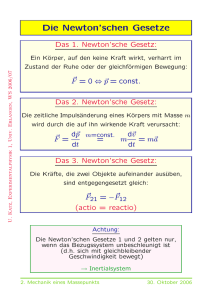
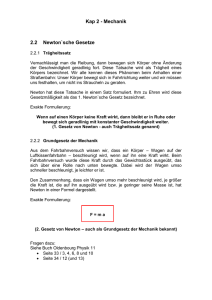
2 Woche.doc, 21/22.10.14 1.4 Dynamik, Newton´sche Axiome (→ Postulate) der klassischen (Punkt)Mechanik Ausgangspunkt: Die Kinematik sagt nichts über die Ursache der Bewegung von Körpern in Raum und Zeit. In der Dynamik wird die Bewegung von Körpern unter dem Einfluss von Kräften F betrachtet, deren Wirkung auf die Körper Newton als Ursache für ihre Bewegung postuliert hat. Beachte, dass auch kräftefreie Körper sich bewegen können. 1.4.1 I. Newton´sches Axiom, Inertialsysteme, Galilei- Transformation Newton´s Formulierung: Jeder Körper verharrt im Zustand der Ruhe oder der geradlinig gleichförmigen Bewegung, wenn er nicht durch einwirkende Kräfte gezwungen wird, seinen Zustand zu ändern. Heutige Formulierung: Es gibt Koordinatensysteme, in denen ein kräftefreier Körper im Zustand der Ruhe oder der geradlinig gleichförmigen Bewegung verharrt; diese heißen → Inertialsysteme (IS). Der Übergang zwischen zwei verschiedenen IS, Σ und Σ', die sich mit konstanter Relativgeschwindigkeit u gegeneinander bewegen und deren Koordinatenursprünge um R = const gegeneinander verschoben sind, wird durch die Transformation r = r' + R + u ⋅ t , t = t' → Galilei1)-Transformation Abb. 2.1 beschrieben. Beachte, dass die Zeit nicht mit transformiert wird, in Übereinstimmung mit ↔ Newton´s Fiktion von der absoluten Zeit. 1) Galileo Galilei (1564 bis 1642). Brecht: Das Leben des Galilei. Bemerkungen: (i) Bewegen sich zwei Körper geradlinig gleichförmig mit v1 bzw. v2 , so ist nicht entscheidbar, welcher von beiden ruht. Im Ruhesystem eines jeden bewegt sich der andere usw. usf. (ii) Das Koordinatensystem, in dem die Fixsterne ruhen, ist ein IS ↔ Newton´sche Fiktion vom absoluten Raum. 1 1.4.2 II. Newton´sches Axiom, Newton´sche Bewegungsgleichung (NBG). Galilei-Invarianz der klassischen Mechanik Was passiert bei F ≠ 0? Experimentelle Erfahrung: Es bedarf einer Kraft, um die Geschwindigkeit eines Körpers zu ändern. Man findet ∆v ~ F , Proportionalitätsfaktor: m → träge Masse, Skalar, Maßeinheit: [m] = kg. ∆t Ein Körper setzt einer Bewegungsänderung einen Widerstand entgegen, der unabhängig von der Stärke der einwirkenden Kraft ist und in diesem Sinne den Körper selbst charakterisiert, also eine → intrinsische Eigenschaft des Körpers ist. Durch Messung der durch die Kraft hervorgerufenen Beschleunigung wird jedem Körper eine träge Masse (s.u. → Trägheit) zugeordnet. Def.: p := m v = m r& → Impuls des Körpers/MP Newton postuliert: F= dp dt = d d (m v) = (m r& ) , dt dt d.h. die zeitliche Änderung des Impulses des Körpers/MP ist gleich der wirkenden Kraft. Für zeitunabhängige Massen m folgt F = m &r& = m a bzw. F( r, r&, t ) = m d2 r(t) → Newton´sche Bewegungsgleichung (NBG) dt 2 Die NBG ist die Grundgleichung der Newton´schen Dynamik. Es handelt sich um eine ODE 2. Ordnung für die Bahnkurve des Körpers r (t). Beachte [F] = N, 1 N = 1 kg m s-2. 2 Grundaufgabe der Newton´schen Mechanik: Bestimme aus der auf den Körper/MP wirkenden resultierenden Kraft unter Verwendung der Anfangsbedingungen (AB) r (t = t0) = r0 und v (t = t0) = v0 durch Integration der NBG die Bahnkurve r (t). Vorgehensweise/"Rezept": (i) Ermittle die (resultierende) wirkende Kraft F( r, r&, t ) ↓ Lorentz-Kraft, Reibungskräfte (ii) Integriere die NBG m &r& = F(r, r&, t ) und bestimme aus den Anfangsbedingungen die beiden Integrationskonstanten. (iii) Diskutiere die Lösung. Einfachstes Beispiel: Die Bahnkurve des kräftefreien Körpers/MP lautet: r (t) = v0 ⋅ t + r0 Wichtige Beobachtung: Die NBG ist invariant gegen Zeitumkehr, t → - t (reversibel), und invariant unter der Galilei-Transformation r ( t ) = r ' ( t ) + R + u ⋅ t, t = t ' , denn Abb. 2.2 d r d r' d2 r d2 r' d2 r d 2 r' = + u bzw. v = v '+ u , = , d . h ., aus F ( r ) = m fo lg t F ( r ' ) = m . dt dt dt 2 dt 2 dt 2 dt 2 Das bedeutet: Sei Σ ein IS, also ein KS, in dem die NBG gültig ist, und Σ' ein KS, das sich geradlinig gleichförmig gegen Σ mit der Relativgeschwindigkeit u = const bewegt, dann gilt die NBG in Σ', d.h., auch Σ' ist ein IS. Fazit: In allen IS gilt die NBG (die Newton´schen Axiome). Die klassische Mechanik ist Galilei-invariant. Die IS sind bis auf die Galilei-Transformation eindeutig. 3 Bem.: Mach1)´sche Hypothese zum Ursprung der Trägheit: Die Trägheit eines Körpers hat ihren Ursprung in der Existenz der "fernen" Massen des Kosmos. Sie ist eine Art kollektiver Effekt ihrer Wechselwirkungen. Entfernte man die übrigen Massen aus dem Kosmos, würde die Trägheit verschwinden. 1) Ernst Mach ( ) ■ Eindimensionale Bewegung eines MP unter dem Einfluss einer Kraft F(x), [L2/I, § 11] Die Newton'sche Bewegungsgleichung (NBG) lautet m d2x dU = F( x ) = − 2 dt dx Abb. 2.3 Bei der Bestimmung der Bahnkurve x(t) gehen wir vom Energieerhaltungssatz m (x& ( t ) )2 + U (x ( t ) ) = E = const 2 aus, der im Unterschied zur NBG eine ODE 1. Ordnung für x(t) ist. Umgestellt nach dx/dt ergibt sich nach Trennung der Variablen für die zu x(t) inverse Funktion t(x) = m 2 ∫ dx +c . E − U( x ) Die Gesamtenergie E und die Integrationskonstante c werden aus den Anfangsbedingungen ermittelt. 4 Finite eindimensionale Bewegungen zwischen den Umkehrpunkten xi, E = U(xi), sind periodisch (E < U(x) ist der klassisch verbotene Bereich der Bewegung). Für die Schwingungsdauer/Periode erhalten wir den Ausdruck T=2 m 2 x2 (E ) ∫ x1 ( E ) dx = 2m E − U(x ) x2 (E ) ∫ x1 ( E ) dx = T(E) . E − U(x ) Im allgemeinen hängt die Schwingungsdauer T von der Energie E, also von der Amplitude, der Schwingung ab. Bei kleinen Auslenkungen um eine stabile Gleichgewichtslage finden wir aus der allgemeinen Formel das bekannte Ergebnis für harmonische Schwingungen (lineare Kraft, F = k x) T = 2π m k für U(x ) = k 2 m ω02 x 2 x = . → ZEIGEN 2 2 In diesem Fall ist T unabhängig von der Amplitude der Schwingung. Eine interessante Frage ist, ob es eine periodische Bewegung gibt, deren Schwingungsdauer für beliebig große Auslenkungen konstant ist. Diese Bewegung wird durch ein Zykloidenpendel realisiert, wie wir später zeigen werden. Wer "Zykloidenpendel" bei Wikipedia als Suchbegriff eingibt, den erwartet eine höchst interessante Exkursion in die Epoche der Anfänge der Newton´schen Mechanik, in der neben Newton selbst Gelehrte wie Christian Huygens (1629-1695, nach Aussage von Newton der "eleganteste Mathematiker seiner Zeit"), den Gebrüdern Bernoulli und andere wirkten. Im Mittelpunkt dieser Exkursion steht die von Johann Bernoulli (1667-17 48) im Jahre 1695 aufgeworfene Frage, auf welcher Kurve eine Kugel im Schwerefeld der Erde in kürzester Zeit reibungsfrei von einem Punkt A in einen Punkt B gleitet (Brachystrochronen-Problem, das als Geburtstunde der Variationsrechnung gilt). 5 Zusatz: Kleine Änderungen δU(x) im Potenzial U(x), δU(x) << U(x), führen zu folgender Korrektur in der Schwingungsdauer x2 x 2 + δx 2 dx dx δT = 2 m ∫ −∫ = − − δ − E U ( x ) U ( x ) E U ( x ) x1 x1 + δx1 = 2 2m ∂ ∂E x2 x 2 + δx 2 ∫ dx E − U( x ) − δU( x ) − ∫ dx E − U( x ) ≈ x1 + δx1 x1 ≈ 2 2m ∂ ∂E x x2 x x 2 δU( x ) 1 2 ∂ 2 δU( x ) − ∫ dx E − U ( x ) = − 2m dx ∫ dx E − U ( x ) − δU( x ) − ∫ dx ∫ 2 x1 ∂E x1 E − U ( x ) x1 E − U( x ) x1 Im Fall des schwach anharmonischen Oszillators mit der Bewegungsgleichung m &x& + kx + m β x 3 = 0 → Duffing-Oszillator ohne Reibung (Berliner Ingenieur) ergibt sich daraus mit m ω02 x 2 mβ x4 U( x ) = , δU( x ) = 2 4 eine Korrektur der Schwingungsdauer T(E) ≈ 2π 3π β E − . ω0 2m ω50 (PRÜFEN) Interessantes über das Resonanzverhalten erzwungener anharmonischer Schwingungen findet sich in [L2/I, 29]. 6 22 10 14 1.4.3 Beschleunigte Bezugssysteme (BZS) Fall A: KS Σ' bewege sich translatorisch mit konstanter Relativbeschleunigung a = const a gegenüber dem IS Σ, d.h. r 0 ( t ) = t 2 . In Σ hat die NBG die Form 2 F = m &r& = m ( &r&0 + &r&' ) = m a + m &r&' . Aus Sicht eines Beobachters in Σ' (dem beschleunigten BZS) gilt m &r&' = F 123 + eingeprägt e Kraft mit Abb. 2.4 F 12T3 Trägheitsk raft FT = − m a → Trägheitskraft/Scheinkraft infolge Beschleunigung von Σ'. Fazit: Bei der Formulierung der NBG im beschleunigten KS ist die Scheinkraft FT zu berücksichtigen. ■ Beobachter im frei fallenden Fahrstuhl Unter seinem eigenen Gewicht F = m (S) g erfährt Beobachter im Fahrstuhl die Beschleunigung m ( T ) &r& = m (S) g + FT = m (S) g − m ( T ) g = ( m (S) − m ( T ) ) g = 0 , vorausgesetzt die schwere Masse m(S) und die träge Masse m(T) stimmen überein (vgl. Kap. 1.4.7 Newton´sche Gravitationstheorie, Äquivalenzprinzip) ■ anfahrender/abbremsender Bus ■ Whiskybar Abb. 2.5 Flüssigkeitsspiegel senkrecht zur resultierenden Kraft 7 Fall B: Rotierende KS/Bezugssysteme KS Σ' mit r ' ( t ) = x i ' ( t ) ei ( t ) rotiere gegen IS (!) Σ mit r ( t ) = x i ( t ) ei , wobei ω(t) die momentane Drehachse durch den gemeinsamen Koordinatenursprung bezeichne. Geschwindigkeit: r&( t ) = x& i ( t ) e i = x& i ' ( t ) e i ' ( t ) + x i ' ( t ) e& i ' ( t ) r&( t ) = x& i ( t ) e i 14 4244 3 G . r& ( t ) aus Sicht eines mit Σ verbundene n Beobachters 1) = ↑ r ( t ) = r '( t ) x& i ' ( t ) ei ' ( t ) 14243 G . r& '( t ) aus Sicht eines mit Σ ' verbundene n Beobachters + x i ( t ) e& i ' ( t ) 14243 vom IS Σ aus gemessene G . eines MP , der mit Σ ' starr verbunden rotiert 1 ) dessen Koordinaten x', y' und z' also konstant. Zur Berechnung von e& i ' ( t ) = dei ' ( t ) verwenden wir den allgemeinen Ausdruck für die dt Geschwindigkeit bei starrer Rotation um eine (momentane) Drehachse ω(t) durch den Koordinatenursprung (vgl. MMP): dϕ = ω dt dr = dϕ r sin α = ω r sin α dt ↑ Kreisbogen zu dϕ am Kreis mit Radius r sinα dr ist tangential zur Bahnkurve gerichtet, die Bahnebene steht senkrecht zu momentanen Drehachse ω(t) und zum Radiusvektor r . Deshalb gilt Abb. 2.6 d r(t) = r&( t ) = ω × r dt d dt MERKE: ↑ Zeitableit ung von Σ aus gesehen Also ist d' dt = ↑ Zeitableit ung der Komponente n in Σ ' + ω( t ) × . ↑ E inf luss der Rotation von Σ ' dei ' ( t ) = e& i ' ( t ) = ω × ei ' dt und damit r&( t ) = r&' ( t ) + ω( t ) × r ' ( t ) . 8 Für die Beschleunigung erhalten wir: &r&( t ) = &x& i ( t ) e i = d (x& i ' ( t ) ei ' ( t ) + ω( t ) × x i ' ( t ) ei ' ( t )) = dt & ( t ) × x i ' ( t ) e i ' ( t ) + ω( t ) × x& i ' ( t ) ei ' ( t ) + ω( t ) × x i ' ( t ) e& i ' ( t ) = = &x& i ' ( t ) e i ' ( t ) + x& i ' ( t ) e& i ' ( t ) + ω 12 3 12 3 ω( t ) × e i '( t ) ω( t ) × e i '( t ) & ( t ) × x i ' ( t ) e i ' ( t ) + ω( t ) × x& i ' ( t ) ei ' ( t ) + ω( t ) × x i ' ( t ) ω( t ) × e i ' ( t ) = &x& i ' ( t ) e i ' ( t ) + x& i ' ( t ) ω( t ) × ei ' ( t ) + ω − −− − − −− − −− − −− − −− − −− −− − −− − −− − −− − −− − −− − −− − Daraus folgt &r&( t ) = &r&' ( t ) + 2 ω × r&' + ω & × r' + ω × (ω × r' ) . Sei F die eingeprägte Kraft im IS Σ (also F = m &r& ). Dann lautet die NBG im rotierenden BS/ Nichtinertialsystem (NIS) m &r&' = & × r ' − m ω × (ω × r ' ) . F' − 2 m ω × r& ' − m ω 123 1424 3 123 14 4244 3 eingeprägt e Kraft Coriolis − Kraft Kraft aus Winkel − beschleuni gung Zentrifuga lkraft Fazit: Im rotierenden NIS Σ' wird die Beschleunigung des MP durch die eingeprägte Kraft und drei Trägheitskräfte bestimmt. 9