theoretische physik klassische mechanik
Werbung

T HEORETISCHE P HYSIK
Hans-Jürgen Matschull
Institut für Physik, Universität Mainz
23.7.2003
T EIL II
K LASSISCHE M ECHANIK
9 Tensoren
Im Teil I haben wir die wesentlichen Eigenschaften des physikalischen Raumes mit den Mitteln der linearen Algebra beschrieben. Die Orte im Raum haben wir mit den Punkten eines dreidimensionalen,
metrischen affinen Raumes identifiziert, und darauf aufbauend haben wir die Newtonsche Mechanik für
Systeme von Punktteilchen formuliert. Außerdem haben wir Kraftfelder zur Beschreibung von Wechselwirkungen verwendet, etwa in Form von Gravitations- oder elektromagnetischen Feldern.
In diesem Kapitel wollen wir die mathematischen Strukturen, die hinter diesen Begriffen stehen, etwas
weiter vertiefen. Oft begegnen uns in ganz unterschiedlichen physikalischen Fragestellungen ähnliche mathematische Strukturen. Es ist deshalb nützlich, eine Sprache zu entwickeln, die solche Ähnlichkeiten und
Analogien zwischen scheinbar ganz verschiedenen Objekten leichter erkennbar macht. Gleichzeitig sollte
diese Sprache aber auch dazu geeignet sein, die physikalischen Fragestellungen möglichst anschaulich zu
formulieren. Wir suchen also einen Kompromiss zwischen der Sprache der Mathematiker, die oft speziell darauf ausgelegt ist, möglichst elegante und allgemeingültige Beweise zu führen, und der Sprache der
Physiker, die primär darauf ausgelegt ist, Beobachtungen und Experimente zu beschreiben.
Dass zwischen diesen Anforderungen manchmal eine gewisse Spannung besteht, haben wir bereits
bei der Beschreibung des physikalischen Raumes gesehen. Der Mathematiker denkt bei einem N dimensionalen affinen Raum immer gleich an den speziellen Raum R N . Der Grund ist sehr einfach. Man
weiß, dass alle affinen Räume gleicher Dimension isomorph sind. Um Sätze über affinen Räume und Vektorräume zu beweisen, kann man sich daher auf einen speziellen, möglichst einfach strukturierten Raum
beschränken und alle Beweise in diesem Raum führen. Für den Physiker ist die Vorstellung des Raumes als R3 aber sehr unbefriedigend, denn sie vermittelt die falsche Vorstellung, dass es so etwas wie ein
ausgezeichnetes Koordinatensystem gäbe, und insbesondere einen Nullpunkt.
Gesucht ist deshalb eine Formulierung von physikalischen Theorien, in der die verwendeten mathematischen Objekte die physikalischen Strukturen möglichst gut widerspiegeln, auch wenn dies hin und wieder
bedeutet, dass die Beweise für mathematische Sätze, wenn wir sie denn führen wollen, ein wenig umständlicher aussehen als sie tatsächlich sind. Eine dafür recht gut geeignete Sprache, in der sich einerseits alle
wesentlichen Aspekte der linearen Algebra und der Analysis erfassen lassen, die aber andererseits auch
sehr gut an die gängigen physikalischen Konzepte von Raum und Zeit, Kraftfeldern und die Beschreibung
von dynamischen Systemen angepasst ist, bietet das Tensorkalk ül.
Etwas überspitzt kann man sagen, dass alle mathematischen Objekte, die wir bis jetzt eingeführt und
benutzt haben, Tensoren oder Tensorfelder sind, oder dass sie zumindest etwas mit diesem Konzept zu
tun haben. Das Tensorkalkül dient im wesentlichen dazu, mathematische Objekte und Strukturen, wie sie
typischerweise in physikalischen Theorien auftreten, zu klassifizieren. Außerdem stellt es einen Rahmen
bereit, der sich fast beliebig erweitern lässt, und in dem in einer sehr genau definierten Art und Weise neue
Objekte aus bereits vorhandenen konstruiert werden können.
Natürlich müssen wir erst einmal definieren, was denn ein Tensor überhaupt ist. Das werden wir in
diesem Kapitels tun, und wir werden zeigen, wie sich die wichtigsten mathematischen Begriffe aus dem
ersten Teil in dieses Konzept einpassen. Viele der dort hergeleiten, scheinbar sehr unterschiedlichen Eigenschaften von Vektoren und Vektorfeldern werden dabei in einem neuen, einheitlichen Licht erscheinen.
Vektoren und duale Vektoren
Es sei V ein N -dimensionaler Vektorraum über R. Um später eine einheitliche Notation einzuführen,
bezeichnen wir die Vektoren mit fett gedruckten Buchstaben x, y, . . . ∈ V, und eine Basis von V mit e i ,
wobei der Vektorindex i irgendeine nicht weiter spezifizierte Indexmenge mit N Elementen durchläuft.
Einen Vektor x können wir dann durch seine Komponenten x i bezüglich dieser Basis darstellen,
x = xi ei ∈ V.
1
(9.1)
Warum wir den Index nach oben schreiben, werden wir gleich verstehen. Wir verwenden außerdem die
folgende, leicht veränderte Summenkonvention.
Über Vektorindizes in einem Produkt ist genau dann zu summieren, wenn derselbe Index einmal als oberer und einmal als unterer Index auftritt.
Andere Situationen, also Ausdrücke, in denen derselbe Index zweimal unten oder zweimal oben steht,
werden im folgenden nicht auftreten und sind, wie wir sehen werden, auch nicht sinnvoll.
Der zu V duale Vektorraum V ∗ ist die Menge aller linearen Abbildungen V → R. Ist u ∈ V ∗ , so
bezeichnen wir die durch u definierte Abbildung mit einem Punkt, also
u:
V → R,
x 7→ u · x.
(9.2)
Da diese Abbildung linear ist, gilt für alle x, y ∈ V, u ∈ V ∗ und s ∈ R
u · (x + y) = u · x + u · y,
u · (s x) = s (u · x).
(9.3)
Damit V ∗ zu einem Vektorraum wird, erklärt man die Vektoraddition und skalare Multiplikation in V ∗ wie
für Abbildungen üblich. Für u, v ∈ V ∗ , x ∈ V und s ∈ R ist
(u + v) · x = u · x + v · x,
(s u) · x = s (u · x).
(9.4)
Umgekehrt definiert jeder Vektor x ∈ V eine lineare Abbildung V ∗ → R, die genau die gleichen Eigenschaften hat, nämlich
x : V ∗ → R,
u 7→ u · x.
(9.5)
Tatsächlich lässt sich jede lineare Abbildung V ∗ → R so schreiben. Der zu V ∗ duale Vektorraum ist
demnach V. Um diese Symmetrie zum Ausdruck zu bringen, fasst man den Punkt auch als eine bilineare
Abbildung auf, die einen dualen Vektor und einen Vektor auf eine reelle Zahl abbildet,
V∗ × V → R :
(u, x) 7→ u · x.
(9.6)
Bilinear bedeutet linear in beiden Argumenten, also die Eigenschaften (9.3) und (9.4). Wir nennen u · x
auch einfach das Produkt von u und x.
Zu jeder Basis ei von V gibt es eine zugehörige duale Basis ei von V ∗ . Der Index i durchläuft dabei
die gleiche Indexmenge. Wir unterscheiden die Basis von der dualen Basis dadurch, dass wir den Index
einmal nach unten und einmal nach oben schreiben.
Die duale Basis ist dadurch eindeutig festgelegt, dass die dualen Vektoren e i ∈ V ∗ , aufgefasst als lineare
Abbildungen V ∗ → R, die Basisvektoren ej ∈ V auf Null oder Eins abbilden, je nachdem, ob i gleich j
ist oder nicht. Das lässt sich mit dem bekannten Kronecker-Symbol schreiben,
1
für i = j,
i
i
e · ej = δ j =
(9.7)
0
für i 6= j.
Auch diese Bedingung ist symmetrisch in dem Sinne, dass ei dann auch die zu ei duale Basis ist.
Zu jeder Basis von V gibt es eine eindeutig bestimmte duale Basis von V ∗ .
Einen dualen Vektor u ∈ V können wir durch seine Komponenten bezüglich der dualen Basis e i darstellen,
wobei wir den Index diesmal nach unten schreiben, damit wieder die Summenkonvention zur Anwendung
kommt,
u = u i ei ∈ V ∗ .
(9.8)
Bilden wir nun das Produkt von u und a, so finden wir
u · x = (ui ei ) · (ej xj ) = ui (ei · ej ) xj = ui δ ij xj = ui xi .
Das Produkt ist einfach durch die Summe über die Produkte der Komponenten gegeben.
2
(9.9)
Aufgabe 9.1 Eine andere nützliche Eigenschaften einer Basis und ihrer dualen Basis ist, dass die dualen
Basisvektoren ei , aufgefasst als lineare Abbildungen V → R, den Vektoren ihre Komponenten zuordnen,
und umgekehrt die Basisvektoren ei , aufgefasst als lineare Abbildungen V ∗ → R, den dualen Vektoren
ihre Komponenten zuordnen. Man zeige das, also
x = x i ei ,
u = u i ei
⇒
xi = ei · x,
ui = u · e i .
(9.10)
Ein typisches Beispiel für einen Vektorraum und seinen Dualraum sieht wie folgt aus. Es sei V der Raum
aller Spaltenvektoren der Länge N , also
1
x
..
(9.11)
x = . ∈ V, mit x1 , . . . , xN ∈ R.
N
x
Jede lineare Abbildung u : V → R kann dann wie folgt geschrieben werden,
u:
x
7→
u · x = u 1 x1 + · · · + u N xN ,
(9.12)
mit eindeutig bestimmten Koeffizienten u1 , . . . uN ∈ R. Fassen wir diese zu einem Zeilenvektor zusammen,
u = u1 · · · uN ∈ V ∗ , mit u1 , . . . , uN ∈ R,
(9.13)
so lässt sich die Abbildung (9.12) als Matrixmultiplikation schreiben,
1
x
.
u · x = u1 · · · un .. = u1 x1 + · · · + uN xN .
xN
(9.14)
und die Zahlen u1 , . . . , uN sind die Komponenten von u bezüglich der dazu dualen Basis
e1 = 1 0 · · · 0 ,
...,
eN = 0 · · · 0 1 .
(9.16)
Natürlich sind in diesem Fall die Zahlen x1 , . . . , xN die Komponenten des Vektors x bezüglich der Basis
1
0
0
..
e1 = .. ,
...,
eN = . ,
(9.15)
.
0
0
1
Der zum Spaltenvektorraum V duale Vektorraum ist folglich der Zeilenvektorraum V ∗ . Dies ist gewissermaßen der Prototyp für einen Vektorraum und seinen Dualraum. Oft ist es nützlich, sich Vektoren als
Spalten und duale Vektoren als Zeilen vorzustellen. Insbesondere wird dadurch klar, dass es sich um zwei
verschiedene Arten von Objekten handelt. Obwohl der duale Vektorraum V ∗ die gleiche Dimension hat
wie der Vektorraum V selbst, ist er nicht mit diesem identisch.
Aufgabe 9.2 Die Regeln (9.3) und (9.4) entsprechen formal den Eigenschaften eines Skalarproduktes. Was
ist jedoch der wesentliche Unterschied zwischen dem hier definierten Produkt und einem Skalarprodukt?
3
Aufgabe 9.3 Es sei V der Raum aller Spaltenvektoren der Länge N , und V ∗ der Raum aller Zeilenvektoren
der Länge N . Ferner sei die folgende Basis von V gegeben,
1
1
1
1
1
1
1
0
1
1
0
0
(9.17)
···,
eN = 1 .
e3 = 0 ,
e2 = 0 ,
e1 = 0 ,
..
..
..
..
.
.
.
.
1
0
0
0
Man bestimme die duale Basis ei , i ∈ {1, . . . , N }, von V ∗ .
Aufgabe 9.4 Wir haben hier der Einfachheit halber nur endlich dimensionale Vektorr äume betrachtet.
Für Vektorräume unendlicher Dimension kann man ganz analog einen dualen Vektorraum einf ühren. Allerdings ist dieser in der Regel nicht mehr genauso groß wie die Vektorraum selbst. Es sei zum Beispiel V
der Raum aller unendlichen Folgen a = (a1 , a2 , . . .) mit der Eigenschaft, dass alle bis auf endlich viele
Glieder gleich Null sind. Das ist ein unendlich dimensionaler Vektorraum, der aber noch vergleichsweise
klein ist. Es lässt sich sogar recht leicht eine Basis ei von V angeben, mit i ∈ N, so dass sich jeder Vektor
eindeutig als endliche Linearkombination der Basisvektoren schreiben l ässt. Wie sieht diese Basis aus?
Was ist der duale Vektorraum V ∗ ? Gibt es eine zu ei duale Basis von V ∗ ?
Basistransformationen
Die Komponenten eines Vektors sind immer nur bezüglich einer gegebenen Basis definiert. Ändern wir
die Basis, so ändern sich auch die Komponenten. Wir müssen zwischen dem Vektor x ∈ V als solchem
und seiner Darstellung durch die Komponenten xi unterscheiden, und entsprechend zwischen dem dualen
Vektor u ∈ V ∗ seine Darstellung durch die Komponenten ui .
Wir betrachten im folgenden zwei Basen ei und ea , die wir durch ihre Indizes unterscheiden. Der Index
a durchlaufe eine andere Indexmenge als der Index i, zum Beispiel i ∈ {x, y, z} und a ∈ {1, 2, 3} im Falle
eines dreidimensionalen Vektorraumes. Die Beziehung zwischen den Basen kann durch eine N ×N - Übergangsmatrix ausgedrückt werden, wobei wieder N = dim V ist. Wir stellen dazu die Basisvektoren e a als
Linearkombination der Basisvektoren ei dar, oder umgekehrt die Basisvektoren ei als Linearkombination
der Basisvektoren ea ,
ea = ei Λia ⇔ ei = ea Λai .
(9.18)
Damit die beiden Gleichungen zueinander äquivalent sind, müssen die Übergangsmatrizen zueinander
invers sein, also
Λia Λaj = δ ij oder Λai Λib = δ ab .
(9.19)
Wir können das als Matrixmultiplikation lesen, wenn wir den ersten, oberen Index der Übergangsmatrix
als Zeilenindex, und den zweiten, unteren Index als Spaltenindex interpretieren. Die Summenkonvention
sorgt dafür, dass die Matrixmultiplikation richtig ausgeführt wird.
Natürlich besteht dann auch ein Zusammenhang zwischen den dualen Basen e i und ea . Dieser wird
durch die gleichen Übergangsmatrizen vermittelt. Es gilt nämlich
ea = Λai ei
⇔
ei = Λia ea .
(9.20)
Der Beweis ist ganz einfach. Es sei ei die zu ei duale Basis, also ei · ej = δ ij . Dann ist
ea · eb = (Λai ei ) · (ej Λjb ) = Λai (ei · ej ) Λjb = Λai δ ij Λjb = Λai Λib = δ ab ,
4
(9.21)
also ist auch ea die zu ea duale Basis.
Die Transformationseigenschaften (9.18) und (9.20) lassen sich leicht einprägen, denn das sind die einzigen Möglichkeiten, die Basisvektoren so mit den Übergangsmatrizen zu kombinieren, dass alle Indizes
richtig zusammenpassen und dabei die Summenkonvention zur Anwendung kommt.
Aus diesen Transformationsgesetzen lassen sich schließlich auch die Regeln für die Komponenten eines
Vektors und eines dualen Vektors ableiten. Es sei also
x = xi ei = xa ea ∈ V,
und u = ui ei = ua ea ∈ V ∗ .
(9.22)
Dann ergibt sich aus (9.10)
xi = ei · x,
xa = ea · x,
ui = u · e i ,
ua = u · e a ,
(9.23)
und durch Einsetzen von (9.18) und (9.20) das folgende Transformationsverhalten für die Komponenten
eines Vektors,
xa = Λai xi ⇔ xi = Λia xa .
(9.24)
Für die Komponenten eines dualen Vektors gilt entsprechend
ua = ui Λia
⇔
ui = ua Λai .
(9.25)
Auch diese Zusammenhänge lassen sich leicht einprägen, da es keine andere Möglichkeit gibt, die Komponenten so mit der Übergangsmatrix zu kombinieren, dass die Indexstellung stimmt und die Summenkonvention zur Anwendung kommt. Alternativ können wir das auch wie folgt formulieren:
Bei einem Basiswechsel transformieren sich die Komponenten von Vektoren so wie die dualen
Basisvektoren und die Komponenten von dualen Vektoren so wie die Basisvektoren.
Ein Vektor wird also durch einen Satz von N reellen Zahlen dargestellt, der sich beim Wechsel der Basis
in einer ganz bestimmten Art und Weise transformiert. Wir können das im Prinzip als eine Definition
des Begriffes “Vektor” auffassen. Das gleiche gilt für einen dualen Vektor, nur dass für diesen eben ein
anderes Transformationsverhalten gilt. Vektoren und duale Vektoren unterscheiden sich dadurch, dass ihre
Komponenten beim Basiswechsel anders transformieren. Deshalb unterscheiden wir sie durch obere und
untere Indizes.
Die verschiedenen Transformationseigenschaften von oberen und unteren Indizes haben zur Folge, dass
eine bestimmte Kombination eines dualen Vektors und eines Vektors von der Basis unabhängig ist, nämlich
das Produkt
u · x = u i xi = u a xa .
(9.26)
Einen solchen Ausdruck nennen wir einen Skalar. Ein Skalar ist einfach eine reelle Größe, die sich bei
einem Basiswechsel gar nicht verändert.
Aufgabe 9.5 Es sei V der Raum aller Spaltenvektoren der Länge 3, und
Zeilenvektoren der Länge 3. Eine Basis ea , mit a ∈ {1, 2, 3}, sei durch
1
0
e1 = 0 ,
e2 = 1 ,
e3 =
0
0
gegeben, eine zweite Basis ei , mit i ∈ {x, y, z}, durch
1
0
1 ,
1 ,
ex =
ey =
0
1
V ∗ der dazu duale Raum aller
0
0
1
(9.27)
1
ez = 0 .
1
(9.28)
Man bestimme die Übergangsmatrizen Λai und Λia , finde die dualen Basen ea und ei , und verifiziere das
Transformationsverhalten (9.20).
5
Aufgabe 9.6 Es seien ei und ea zwei Basen von V, und ei bzw. ea die dazu dualen Basen. Man zeige, dass
sich die Übergangsmatrizen wie folgt darstellen lassen,
Λai = ea · ei ,
Λia = ei · ea .
(9.29)
Aufgabe 9.7 Es sei V der Raum aller Spaltenvektoren der Länge 2, und V ∗ der entsprechende Zeilenvektorraum. Die Basis ea , mit a ∈ {1, 2}, und die Basis ei , mit i ∈ {u, v}, seien durch
sin α
cos α
0
1
(9.30)
, ev =
,
eu =
, e2 =
e1 =
− cos α
sin α
1
0
gegeben, wobei α ein fest gewählter Winkel ist. Man bestimme die Übergangsmatrizen und die dualen
Basisvektoren.
Aufgabe 9.8 Basistransformationen können verkettet werden. Es seien ei , ea und eµ drei Basen von V,
die wir durch unterschiedliche Indexmengen unterscheiden. Man zeige, dass dann die Übergangsmatrix
Λiµ , die die erste Basis in die dritte überführt, durch das Matrixprodukt der Übergangsmatrizen Λia und
Λaµ gegeben ist, also
Λiµ = Λia Λaµ .
(9.31)
Die Menge aller möglichen Basistransformationen bildet folglich eine Gruppe. Um welche Matrixgruppe
handelt es sich?
Tensoren
Das Konzept eines Vektors oder eines dualen Vektors als ein Satz von N reellen Zahlen, die sich unter
einem Basiswechsel in einer ganz bestimmten Art transformieren, lässt sich verallgemeinern.
Betrachten wir zum Beispiel einen Satz von N 2 reellen Zahlen, die wir in Form einer Matrix anordnen
und mit Aij bezeichnen, wobei die Indizes i und j jeweils N Werte annehmen. Wir postulieren, dass sich
dieses Zahlenschema unter einem Basiswechsel wie folgt transformieren soll. Beim Übergang von einer
Basis ei zu einer neuen Basis ea soll sich die Matrix Aij in eine Matrix
Aab = Λai Aij Λjb
(9.32)
transformieren. Der erste, obere Index verhält sich wie der eines Vektors, der zweite, untere Index wie der
eines dualen Vektors.
Wird dadurch irgendein sinnvolles Objekt definiert? Tatsächlich ist das der Fall. Es handelt sich um die
Matrixdarstellung einer linearen Abbildung A : V → V. Sie ordnet einem Vektor x mit den Komponenten
xi bzw. xa einen Vektor y = A(x) mit den Komponenten
y i = Aij xj
bzw. y a = Aab xb
(9.33)
zu. Um zu zeigen, dass diese beiden Gleichungen tatsächlich äquivalent sind, also den gleichen Zusammenhang zwischen den Vektoren x und y ausdrücken, benutzen wir das Transformationsgesetz für die
Komponenten von Vektoren und das postulierte Transformationsgesetz (9.32) für die Matrix. Daraus folgt
y a = Aab xb = Λai Aij Λjb Λbk xk = Λai Aij δ jk xk = Λai Aij xj = Λai y i .
(9.34)
Die rechte Seite der Gleichungen (9.33) transformiert sich in der gleichen Weise wie die linke Seite. Die
Gleichungen drücken denselben Sachverhalt aus, benutzen nur verschiedenen Darstellungen der Vektoren.
Diese Grundidee lässt sich leicht verallgemeinern. Wir können zunächst ganz abstrakt reelle Zahlen zu
einem Schema anordnen, und dann verlangen, dass sich dieses Zahlenschema bei einem Basiswechsel in
6
einer ganz bestimmten Art transformiert. Wir erklären das Transformationsverhalten implizit dadurch, dass
wir das Zahlenschema durch ein Symbol mit m oberen und n unteren Indizes bezeichnen, etwa B i ··· jk ··· l ,
wobei jeder Index Werte aus derselben Indexmenge mit N = dim V Elementen annimmt. Insgesamt
besteht das Schema dann aus N n+m Zahlen. Wir können uns die Einträge des Zahlenschemas in einem
imaginären, höherdimensionalen Raum in Form von Spalten und Zeilen angeordnet vorstellen.
Beim Übergang von einer Basis ei zu einer neuen Basis ea soll sich das Schema B i ··· jk ··· l in ein neues
Schema
B a ··· bc ··· d = Λai · · · Λbj B i ··· jk ··· l Λkc · · · Λld
(9.35)
transformieren. Wir transformieren quasi jeden einzelnen Index mit einer passenden Übergangsmatrix. Die
Transformationsgesetze (9.24) für Vektoren und (9.25) für duale Vektoren sind einfache Spezialfälle davon, die sich für m = 1 und n = 0, bzw. für m = 0 und n = 1 ergeben. Und das Transformationsverhalten
(9.32) für die Matrixdarstellung einer linearen Abbildung ergibt sich für m = 1 und n = 1.
Ein auf diese Weise zunächst ganz abstrakt definiertes Zahlenschema heißt Tensor der Stufe (m, n). Ein
Vektor ist in diesem Sinne ein Tensor der Stufe (1, 0), ein dualer Vektor ein Tensor der Stufe (0, 1), und
eine linear Abbildung V → V ein Tensor der Stufe (1, 1). Einen Skalar, also eine reelle Zahl, die sich beim
Basiswechsel gar nicht transformiert, können wir als Tensor der Stufe (0, 0) auffassen. Er trägt gar keine
Indizes, und transformiert daher auch nicht beim Basiswechsel.
Wir können das in der folgenden, leicht rekursiven, aber sehr intuitiven Definition zusammenfassen:
Ein Tensor der Stufe (m, n) ist ein Zahlenschema mit m oberen und n unteren Indizes, das
sich beim Basiswechsel wie ein Tensor transformiert.
Wir unterscheiden zwischen dem Tensor als abstraktes Objekt, das wir mit B bezeichnen, und seiner
Darstellung bezüglich einer bestimmten Basis durch ein Zahlenschema B i ··· jk ··· l . Als was wir uns dieses
abstrakte Objekt vorstellen müssen, hängt von der Stufe des Tensors ab. Meistens gibt es mehrere Möglichkeiten, einen Tensor als mathematisches Objekt zu interpretieren. So haben wir zum Beispiel gesehen, dass
sich ein Tensor A der Stufe (1, 1) als lineare Abbildung A : V → V interpretieren lässt. Ein Tensor x der
Stufe (1, 0) ist ein Vektor, oder auch eine lineare Abbildung x : V ∗ → R.
Den Raum aller Tensoren der Stufe (m, n) bezeichnen wir mir V (m,n) . Das ist ein (dim V)m+n dimensionaler Vektorraum, und als Spezialfälle haben wir V (1,0) = V, V (0,1) = V ∗ und V (0,0) = R. Die
Addition und skalare Multiplikation in diesen Vektorräumen ist wie üblich Komponentenweise definiert.
Wir addieren zwei Tensoren gleicher Stufe, indem wie die Einträge des Zahlenschemas addieren. Das gleiche gilt für die skalare Multiplikation. Das ist offenbar mit dem linearen Transformationsverhalten (9.35)
verträglich, und es entspricht der komponentenweisen Addition und skalaren Multiplikation von Vektoren.
Die Summe A + B von zwei Tensoren und das reelle Vielfache s A eines Tensors existieren unabhängig
von der gewählten Basis.
Aufgabe 9.9 Warum kann man einen Tensor der Stufe (1, 1) auch als Darstellung einer linearen Abbildung V ∗ → V∗ auffassen?
Aufgabe 9.10 Man zeige, dass das Kronecker-Symbol δ ij einen Tensor δ der Stufe (1, 1) definiert, indem
man das Transformationsverhalten (9.35) nachweist. Einen solchen Tensor, der in allen Basen durch dasselbe Zahlenschema dargestellt wird, nennt man invarianten Tensor. Wenn wir Tensoren der Stufe (1, 1)
als lineare Abbildungen V → V interpretieren, welche spezielle solche Abbildung wird dann durch den
Tensor δ dargestellt?
Aufgabe 9.11 Ein Tensor A der Stufe (0, 2) sei bezüglich einer Basis ei durch seine Darstellung Aij =
δij , also durch das Kronecker-Symbol mit zwei unteren Indizes definiert. Man zeige, dass dies kein invarianter Tensor ist, dass also die Darstellung Aab bezüglich einer anderen Basis ea im allgemeinen nicht
durch das Kronecker-Symbol δab gegeben ist.
7
Aufgabe 9.12 Bevor man das Transformationsverhalten (9.35) postulieren kann, muss man eigentlich erst
zeigen, dass es konsistent ist. Wenn wir zuerst von einer Basis zu einer anderen transformieren, und dann
zu einer dritten, dann muss das Ergebnis dasselbe sein wie wenn wir gleich von der ersten zur dritten
Basis transformieren. Man verwende das Ergebnis von Aufgabe 9.8, um zu zeigen, dass das Transformationsverhalten (9.35) diese Konsistenzbedingung erfüllt.
Aufgabe 9.13 Es sei ein Tensor der Stufe (m, n) gegeben, dargestellt durch ein Zahlenschema B i ··· jk ··· l
bezüglich einer Basis ei . Wir definieren eine Abbildung
B:
∗
V
· · × V }∗ × V
· · × V} → R,
| × ·{z
| × ·{z
m
durch
(9.36)
n
B(u, . . . , v, x, . . . , y) = B i ··· jk ··· l ui · · · vj xk · · · y l ,
(9.37)
B i ··· jk ··· l = B(ei , . . . , ej , ek , . . . , el ).
(9.38)
wobei ui , . . . , vj bzw. xk , . . . , y l die Komponenten von u, . . . , v bzw. x, . . . , y bezüglich der gegeben Basis
sind. Man zeige, dass die so definierte Abbildung, die in jedem ihrer Argumente linear ist, nicht von
der gewählten Basis abhängt. Jeder Tensor der Stufe (m, n) definiert auf diese Weise eine multilineare
Abbildung, die als Argumente m duale Vektoren und n Vektoren hat. Man zeige umgekehrt, dass sich jeder
solchen Abbildung ein Zahlenschema zuordnen lässt, welches sich wie ein Tensor transformiert. Man muss
dazu nur die gegebene Abbildung B für die Basisvektoren auswerten, also
Welche bilineare Abbildung V ∗ × V → R definiert der Tensor δ aus Aufgabe 9.10?
Der Tensor-Baukasten
Tensoren lassen sich nicht nur wie Vektoren addieren und mit Zahlen multiplizieren, sondern sie lassen
sich auch zu neuen Tensoren kombinieren. Das ist die eigentliche Stärke des Tensorkalküls. Zum Teil
haben wir solche Operationen auch schon durchgeführt. So haben wir zum Beispiel aus einem Vektor x
mit Komponenten xi und einem dualen Vektor u mit Komponenten ui einen Skalar u · x = ui xi gebildet.
Oder wir haben eine lineare Abbildung A, dargestellt durch eine Matrix A ij , auf einen Vektor, dargestellt
durch seine Komponenten xi , angewandt, um so einen neuen Vektor y = A(x) zu bekommen, dargestellt
durch y i = Aij xj .
Alle diese Operationen setzen sich aus zwei Grundoperationen zusammen, die Tensoren auf andere Tensoren abbilden. Die erste Grundoperation ist die Tensormultiplikation. Wir multiplizieren zwei Tensoren
beliebiger Stufe, indem wir ihre Komponenten auf alle möglichen Arten multiplizieren und das Ergebnis wieder in einem Schema anordnen. Auf alle möglichen Arten heißt, dass wir jeden Eintrag des einen
Tensors mit jedem des anderen multiplizieren.
Explizit sieht das zum Beispiel so aus, dass wir aus einem Tensor A der Stufe (2, 0) und einem Tensor
B der Stufe (1, 1) einen Tensor C der Stufe (3, 1) bilden, der durch das Zahlenschema
C ijkl = Aij B kl
(9.39)
dargestellt wird. Wir schreiben dafür auch C = A ⊗ B, und nennen dies das Tensorprodukt von A und
B. Dass auf diese Weise tatsächlich ein neuer Tensor definiert wird, müssen wir natürlich beweisen. Wir
müssen also zeigen, dass das Zahlenschema (9.39) bei einem Basiswechsel wie ein Tensor transformiert.
Wir setzen voraus, dass A und B Tensoren sind, das heißt für zwei beliebigen Basen e i und ea gilt
Aab = Λai Λbj Aij ,
B cd = Λck B kl Λld .
8
(9.40)
Wenn wir die beiden Gleichungen multiplizieren, bekommen wir
C abcd = Aab B cd = Λai Λbj Λck Aij B kl Λld = Λai Λbj Λck C ijkl Λld .
(9.41)
Das ist genau das Transformationsverhalten eines Tensors der Stufe (3, 1). Also haben wir gezeigt, dass
durch (9.39) ein solcher Tensor definiert ist, und zwar unabhängig davon, in welcher Basis wir diese
Gleichung aufschreiben. Genau wir die komponentenweise Addition ist auch die komponentenweise Multiplikation von zwei Tensoren, wenn sie auf diese Weise ausgeführt wird, unabhängig von der gewählten
Darstellung.
Wie das Tensorprodukt zu verallgemeinern ist, ist sofort offensichtlich.
Das Tensorprodukt eines Tensor der Stufe (m, n) mit einem Tensor der Stufe (p, q) ist ein
Tensor der Stufe (m + p, n + q).
Das einfachste Beispiel ist das Tensorprodukt eines Vektors z = z i ei mit einem dualen Vektor w = w i ei .
Das ist ein Tensor A = z⊗w der Stufe (1, 1), dessen Komponenten durch A ij = z i wj gegeben sind. Wenn
V der Spaltenvektorraum der Länge N , V ∗ der zugehörige Zeilenvektorraum, und ei die Standardbasis
(9.15) ist, dann lässt sich auch dieses Produkt als Matrixmultiplikation schreiben. Es gilt dann nämlich
1
z
..
z = . ,
w = w1 · · · wN ,
(9.42)
N
z
und folglich
z1
A = z ⊗ w = ...
zN
w1 · · · wN
z 1 w1 · · · z 1 wN
..
..
..
=
.
.
.
.
N
1
N
N
z w ··· z w
(9.43)
Die Matrix A wird offenbar aus allen möglichen Produkten der Komponenten von z und w gebildet.
Das Tensorprodukt ist etwas anderes als das Produkt (9.6) eines Vektors mit einem dualen Vektor, das
eine Zahl liefert. Mit dem Tensorprodukt lassen sich Tensoren höherer Stufe bilden. Man kann damit auch
eine Basis der Vektorräume V (m,n) konstruieren. Bleiben wir bei dem Beispiel von eben, und ersetzen den
Vektor z der Reihe nach durch alle Basisvektoren ei , und den dualen Vektor w der Reihe nach durch alle
dualen Basisvektoren ej . Das Tensorprodukt ei ⊗ ej wird dann durch eine Matrix dargestellt, die nur in
der i-ten Spalte und j-ten Zeile eine Eins, und sonst nur Nullen als Einträge hat. Diese Matrizen bilden
eine Basis von V (1,1) .
Das lässt sich natürlich wieder verallgemeinern. Um eine Basis von V (m,n) zu definieren, müssen wir alle
möglichen Tensorprodukte von m Basisvektoren und n dualen Basisvektoren bilden. Es gibt (dim V) m+n
Möglichkeiten, dies zu tun, und das ist auch die Dimension von V (m,n) . Ein Tensor der Stufe (m, n) hat
dann die Darstellung
k
⊗ ·{z
· · ⊗ e}l .
(9.44)
B = B i ··· jk ··· l ei ⊗ · · · ⊗ ej ⊗ e
{z
} |
|
m
n
Aufgabe 9.14 Man beweise, dass die rechte Seite von (9.44) tats ächlich unabhängig von der Basis ist,
also unter einem Basiswechsel invariant bleibt. Der so definierte Tensor B existiert also unabh ängig von
seiner Darstellung.
Die zweite Grundoperation des Tensorkalküls ist die Spurbildung oder Kontraktion. Wir betrachten noch
einmal eine lineare Abbildung A : V → V, dargestellt durch eine Matrix A ij . Die Spur der Matrix ist die
Summe über die Diagonalemente, also
sp(A) = Aii .
(9.45)
9
Die Spur ist unabhängig von der gewählten Basis. Das lässt sich leicht zeigen. Es gilt
Aaa = Λai Aij Λja = Aij δ ji = Aii .
(9.46)
Die Spur eines Tensors der Stufe (1, 1) ist ein Skalar, der nicht von der gewählten Basis abhängt.
Auch das lässt sich wieder verallgemeinern. Betrachten wir einen beliebigen Tensor A, der mindestens
einen oberen und einen unteren Index hat. Dann können wir über diese Indizes die Spur bilden und so
einen neuen Tensor B definieren. Etwas schematisch,
B ············ = A··· i ······ i··· ,
(9.47)
oder am Beispiel eines Tensors der Stufe (1, 3),
Bkl = Aikil .
(9.48)
Sobald ein Tensor mehr als einen oberen oder mehr als einen unteren Index hat, gibt es mehrere Möglichkeiten, eine Spur zu bilden. Wir sagen in diesem Fall, dass wir den ersten und den dritten Index des Tensors
A kontrahiert haben, um den Tensor B zu bilden.
Auch hier müssen wir erst nachweisen, dass durch die Kontraktion tatsächlich ein neuer Tensor definiert
wird. Der Beweis ist wieder sehr einfach und völlig analog zu (9.46). Wir müssen nur ein paar zusätzliche
Übergangsmatrizen ausschreiben. Wir führen ihn exemplarisch für den Fall (9.48). Es ist
Bcd = Aacad = Λai Aikjl Λkc Λja Λld = δ ji Aikjl Λkc Λld = Bkl Λkc Λld ,
(9.49)
was wieder dem Transformationsverhalten eines Tensors der Stufe (0, 2) entspricht. Für den allgemeine
Fall ist der Beweis genauso zu führen.
Die Kontraktion eines Tensors der Stufe (m, n) ergibt einen Tensor der Stufe (m − 1, n − 1).
Wir verstehen nun auch, warum die Summenkonvention gerade so und nicht anders formuliert ist. Der
Beweis (9.49) funktioniert nur, wenn einer der Indizes, über den summiert wird, oben steht und der andere
unten. Denn nur dann heben sich die beiden Übergangsmatrizen Λai und Λja gegenseitig weg. Würden wir
über einen doppelt oben der doppelt unten vorkommenden Index summieren, hätte das Ergebnis nicht das
richtige Transformationsverhalten, wäre also kein Tensor. Und schon gar nicht, wenn wir über einen Index
summieren würden, der nur einmal oder dreimal vorkommt.
Tatsächlich lassen sich jetzt alle Operationen, die wir mit Vektoren, dualen Vektoren oder Tensoren
höherer Stufe durchgeführt haben, auf diese zwei Grundoperationen zurückführen. So entsteht zum Beispiel das Produkt eines Vektors mit einem dualen Vektor, u · x = ui xi , durch Tensormultiplikation und
anschließende Kontraktion. Ein anderes Beispiel ist die Verkettung von zwei linearen Abbildungen A und
B zu einer Abbildung C = A ◦ B. Diese erfolgt durch Multiplikation der Matrizen, also C ik = Aij B jk .
Auch das ergibt sich aus einer Tensormultiplikation und einer Kontraktion.
Die beiden Grundoperationen können verwendet werden, um Tensoren fast beliebig zu neuen Tensoren
zu kombinieren. Auf diese Weise entsteht ein Art Baukasten. Die Bausteine sind die Tensoren. Ihre Indizes
kann man als Stecker und Buchen interpretieren. Man kann zwei Tensoren aneinander heften und das ganze
als einen zusammengesetzten Baustein betrachten. Das entspricht der Tensormultiplikation. Man kann
auch einen Stecker mit einer Buchse verbinden, und das als einen Baustein mit wenigen freien Steckern
und Buchsen betrachten. Das entspricht der Kontraktion.
Wir werden hier höchstens Tensoren zweiter Stufe benötigen, bis auf eine spezielle Ausnahme eines
Tensor dritter Stufe, den wir am Ende dieses Kapitels einführen werden. Trotzdem ist es ganz nützlich,
das allgemeine Prinzip verstanden zu haben. Das Tensorkalkül bietet eine einheitliche Sprache, in der
sich fast alle Aussagen der linearen Algebra formulieren lassen. Wir wollen das im folgenden anhand von
ein paar Beispielen zeigen, und dabei auch den Anschluss an das herstellen, was wir im Teil I über die
Strukturen des physikalischen Raumes gesagt haben.
10
Aufgabe 9.15 Mit der Interpretation eines Tensors als multilineare Abbildung aus Aufgabe 9.13 l ässt sich
das Tensorprodukt auch ohne Rückgriff auf eine Basis definieren. Im hier gezeigten Beispiel (9.39) sind
die Tensoren bilineare Abbildungen A : V ∗ × V ∗ → R und B : V ∗ × V → R. Man zeige, dass der Tensor
C = A ⊗ B durch die folgende multilineare Abbildung gegeben ist,
C:
V ∗ × V ∗ × V ∗ × V → R,
C(u, v, w, x) = A(u, v) B(w, x).
(9.50)
Aufgabe 9.16 Es sei ei eine beliebige Basis von V und ei die zugehörige duale Basis von V ∗ . Man zeige,
dass der Kronecker-Tensor δ aus Aufgabe 9.10 durch δ = e i ⊗ ei dargestellt werden kann.
Die Metrik
Wir betrachten jetzt einen Vektorraum V, auf dem eine Metrik, also ein Skalarprodukt V ×V → R definiert
ist. Um es von dem Produkt (9.6) zu unterscheiden, für das wir den Punkt verwenden, bezeichen wir das
Skalarprodukt von zwei Vektoren x, y ∈ V zunächst mit g(x, y).
Die Axiome für einen metrischen Vektorraum verlangen, dass das Skalarprodukt symmetrisch und bilinear ist. Daraus folgt mit x = xi ei und y = y i ei
g(x, y) = g(xi ei , y i ei ) = g(ei , ej ) xi y j = gij xi y j ,
(9.51)
wobei gij eine symmetrische N ×N -Matrix ist. Tatsächlich handelt es sich dabei, wie man aus der Indexstellung abliest, um einen Tensor der Stufe (0, 2). Es gilt nämlich beim Übergang von der Basis ei zu einer
neuen Basis ea
gab = g(ea , eb ) = g(ei Λia , ej Λjb ) = g(ei , ej ) Λia Λjb = gij Λia Λjb .
(9.52)
Das ist das Transformationsverhalten, das einen Tensor der Stufe (0, 2) definiert. Wir nennen einen Tensor
symmetrisch, wenn das Zahlenschema unter Vertauschung von zwei Indizes invariant ist, also
gij = gji .
(9.53)
Außerdem müssen wir noch verlangen, dass die Metrik positiv ist. Für alle x ∈ V gilt
g(x, x) ≥ 0,
g(x, x) = 0
⇒
x = 0.
(9.54)
⇒
xi = 0.
(9.55)
Das ist eine weitere Forderung an die Matrix gij , nämlich
gij xi xj ≥ 0,
gij xi xj = 0
Zusammenfassend können wir sagen:
Eine Metrik ist ein positiver, symmetrischer Tensor der Stufe (0, 2).
Mit einer Metrik auf V ist auch eine Metrik auf V ∗ definiert. Aus der Positivität der Matrix gij folgt
nämlich, dass sie invertierbar ist. Es existiert also eine ebenfalls symmetrische, inverse Matrix, die wir mit
g ij bezeichnen, so dass
g ij gjk = δ ik ⇔ gij g jk = δi k .
(9.56)
Diese inverse Matrix ist die Darstellung eines Tensors der Stufe (2, 0). Das müssen wir jetzt gar nicht
mehr anhand der Transformationseigenschaften beweisen, sondern das können wir unmittelbar aus den
Gleichungen (9.56) ablesen.
Dazu argumentieren wir wie folgt. Zuerst wählen wir irgendeine Basis, und definieren einen Tensor
g ij , dessen Komponenten in dieser Basis die Gleichungen (9.56) erfüllen. Dann transformieren wir diesen
11
Tensor in eine beliebige andere Basis. Von der jeweils rechten Seite der Gleichung wissen wir, dass sich
δ ik wie ein Tensor transformiert. Also steht dort auch in jeder anderen Basis das Kronecker-Symbol.
Auf der linken Seite wissen wir, dass sowohl g ij als auch gjk die Darstellungen von Tensoren sind. Außerdem wissen wir, dass wir Tensoren multiplizieren und kontrahieren dürfen, und dass sich das Ergebnis
dieser Operation wieder wir ein Tensor verhält. Wir schließen daraus, dass die Gleichung, so wie sie dort
steht, in jeder Darstellung, als für jeder Wahl der Basis gilt. Wir hätten genauso gut eine andere Basis
wählen können, um die inverse Metrik als Tensor zu definieren.
Das ist eine ganz wesentliche Eigenschaft der Tensorkalküls. Wir können es einer Gleichung, die eine
Beziehung zwischen Tensoren herstellt, allein an ihre Form ansehen, dass sie in in jeder Basis, also für
jede Darstellung der Tensoren gilt. Die Voraussetzung dafür ist, dass auf beiden seiten der Gleichung die
gleichen freien Indizes erscheinen, also die, für die wir noch Werte einsetzen können. Das sind hier die
Indizes i und k. Und alle Indizes, über die summiert wird, müssen genau einmal oben und einmal unten
stehen. Das ist hier der Index j.
Mit Hilfe der inversen Metrik können wir nun das Skalarprodukt von zwei dualen Vektoren u = u i ei
und v = vi ei bilden. Wir setzen dazu g(ei , ej ) = g ij , so dass
g(u, v) = g(ui ei , vi ei ) = g(ei , ej ) ui vj = g ij ui vj .
(9.57)
Tatsächlich können wir sogar noch einen Schritt weiter gehen. Die Tensoren g ij und g ij lassen nämlich
noch eine andere Interpretation zu. Sie lassen sich als lineare Abbildungen V → V ∗ , bzw. V ∗ → V
auffassen. Wir ordnen einem Vektor x = xi ei ∈ V umkehrbar eindeutig einen dualen Vektor x∗ =
x∗i ei ∈ V ∗ zu, indem wir
(9.58)
x∗i = gij xj ⇔ xi = g ij x∗j
setzen. Wenn wir den dualen Vektor x∗ als lineare Abbildung V → R auffassen, dann lässt sich diese mit
den Worten “bilde das Skalarprodukt mit x” anschaulich beschreiben. In einem metrischen Vektorraum
entspricht also jedem Vektor eindeutig eine solche lineare Abbildung, und umgekehrt kann jede lineare
Abbildung V → R, also jeder duale Vektor, eindeutig als Skalarprodukt mit einen Vektor dargestellt
werden.
Es ist daher sinnvoll, die Räume V und V ∗ miteinander zu identifizieren, indem man den Vektor x mit
dem dualen Vektor x∗ gleich setzt. Der Punkt bekommt dann auch wieder seine Bedeutung als Skalarprodukt, denn nun ist
g(x, y) = x∗ · y = x · y.
(9.59)
Eine weitere Konsequenz ist, dass nun auch die Komponenten x i = x∗i und xi Darstellungen desselben
Vektors sind, nämlich
x = x i ei = x i ei ∈ V = V ∗ .
(9.60)
Für die Beziehungen zwischen den Komponenten xi und xi bzw. den Basisvektoren ei und ei finden wir
xi = g ij xj ,
xi = gij xj ,
ei = gij ej ,
ei = g ij ej .
(9.61)
Wir können einen Vektor also wahlweise durch seine “oberen” oder “unteren” Komponenten darstellen,
indem wir ihn entweder als Linearkombination der Basisvektoren, oder der dualen Basisvektoren schreiben. Die beiden Darstellungen transformieren bei einem Basiswechsel noch immer verschieden, aber sie
repräsentieren beide dasselbe Objekt, nämlich den Vektor x.
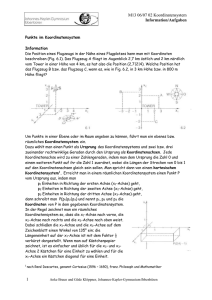
Diese etwas verwirrende Tatsache lässt sich, wie fast alles in einem metrischen Vektorraum, geometrisch
veranschaulichen. Am Beispiel eines zweidimensionalen Vektorraumes wird dies in Abbildung 9.1(a) gezeigt. Dort ist zunächst eine Basis (e1 , e2 ) eingezeichnet. Der Vektor x kann in dieser Basis als Linearkombination x = x1 e1 + x2 e2 dargestellt werden. Die entsprechenden Komponenten (x1 , x2 ) können an
den Achsen, die von den Basisvektoren aufgespannt werden, abgelesen werden.
12
(c)
(d)
x2
x2
x2
e2
e2
x
x
e2
e1
x1
x1 e1
e1
x1
(b)
(a)
Abbildung 9.1: In einem metrischen Vektorraum V gibt es zu jeder Basis e i von V eine duale Basis ei ,
die ebenfalls eine Basis von V ist (a). Nur eine Orthonormalbasis (b) ist zu sich selbst dual.
Die duale Basis (e1 , e2 ) ist eindeutig durch die Forderung ei · ej = δ ij festgelegt. Dies ist jetzt eine
Forderung an die Skalarprodukte der Basisvektoren mit den dualen Basisvektoren. Der Vektor e 1 steht
auf e2 senkrecht, und sein Betrag wird dadurch bestimmt, dass das Skalarprodukt mit e 1 gleich Eins ist.
Entsprechend ist der Vektor e2 festgelegt.
Stellt man nun denselben Vektor als Linearkombination x = x1 e1 + x2 e2 dar, so liest man die entsprechenden Komponenten (x1 , x2 ) an den gestrichelten Achsen ab, die von den dualen Basisvektoren
aufgespannt werden. Sie sind im allgemeinen von der Komponenten (x 1 , x2 ) desselben Vektors verschieden, und sie transformieren auch bei einem Basiswechsel anders.
Es gibt allerdings den Spezialfall, in dem die Basis mit der dualen Basis identisch ist. Aus (9.61) entnehmen wir, dass dies genau dann der Fall ist, wenn gij = δij , und folglich auch g ij = δ ij ist, die Metrik
also durch die Einheitsmatrix gegeben ist. Das ist allerdings keine Forderung an die Metrik, sondern an
die Basis. Eine Basis mit dieser Eigenschaft heißt Orthonormalbasis.
Wir können die wesentlichen Eigenschaften eines metrischen Vektorraumes wie folgt zusammenfassen:
Ein metrischer Vektorraum ist mit seinem Dualraum identisch. Eine Orthonormalbasis ist
mit ihrer dualen Basis identisch.
Wenn wir eine Orthonormalbasis verwenden, dann müssen wir nicht mehr zwischen oberen und unteren
Indizes unterscheiden. Wir können, wie in Abbildung 9.1(b) gezeigt, alle Indizes nach unten schreiben
und einen Vektor einfach als Linearkombination x = xi ei darstellen, wobei wir die Summenkonvention
entsprechend abändern. So hatten wir sie ja auch ursprünglich eingeführt. Der Grund dafür ist, dass in
(9.61) überall das Kronecker-Symbol steht, so dass alle Größen mit oberen Indizes zu den entsprechenden
Größen mit unteren Indizes gleichgesetzt werden.
Das geht natürlich nur dann, wenn wir uns darauf einigen, nur Orthonormalbasen zu verwenden. Das
ist aber, wie wir später sehen werden, nicht immer sinnvoll. Deshalb werden wir auch in einem metrischen
Vektorraum die Unterscheidung zwischen einer Basis und der dazugehörigen dualen Basis nicht aufgeben.
Folglich müssen wir auch weiterhin zwischen oberen und unteren Indizes unterscheiden. Es gibt aber eine
einfache Regel, sie ineinander umzurechnen, nämlich die Formeln (9.61).
Um einen oberen Index in einen unteren zu verwandeln, müssen wir nur das jeweilige Objekt mit der
Metrik multiplizieren und die Spur über den betreffenden Index bilden. Wir sagen auch, dass wir einen
13
Index mit Hilfe der Metrik “nach unten ziehen”. Entsprechend können wir den Index mit der inversen
Metrik wieder “nach oben ziehen”. Laut (9.61) gilt diese Regel sowohl für die Komponenten von Vektoren,
als auch für die Basisvektoren selbst.
Sie lässt sich auf beliebige Tensoren verallgemeinern. Da wir in einem metrischen Vektorraum nicht
zwischen Vektoren und dualen Vektoren unterscheiden müssen, müssen wir auch nicht zwischen Tensoren
der Stufen (m, n) und (p, q) unterscheiden, falls m + n = p + q ist, falls also beide Tensoren insgesamt
gleich viele Indizes haben. Mit Hilfe der Metrik können wir zum Beispiel einen Tensor der Stufe (0, 2)
mit einem Tensor der Stufe (2, 0) identifizieren, indem wir
Bij = gik gjl B kl
⇔
B ij = g ik g jl Bkl
(9.62)
setzen, und dann beides als Darstellungen desselben Tensors zweiter Stufe B interpretieren, so wie wir x i
und xi als Darstellungen desselben Vektors x betrachten können. In einem metrischen Raum können wir
einfach von einem Tensor der Stufe m sprechen, wenn es sich um ein Objekt mit m Indizes handelt. Er
besitzt jedoch verschiedene Darstellungen, die bei einem Basiswechsel verschieden transformieren.
Aufgabe 9.17 Warum ist eine positive Matrix immer invertierbar?
Aufgabe 9.18 Wenn V der Spaltenvektorraum der Länge N ist, V ∗ der entsprechende Zeilenvektorraum,
und die Metrik auf V durch die Summe über der Produkte der Einträge gegeben ist, also das StandardSkalarprodukt auf dem RN , wie sieht dann die Abbildung V → V ∗ : x → x∗ aus? Mit anderen Worten,
welcher Spaltenvektor wird mit welchem Zeilenvektor identifiziert, wenn man V = V ∗ setzt?
Aufgabe 9.19 Für einen speziellen Tensor hatten wir bereits eine Version mit zwei oberen und eine Version
mit zwei unteren Indizes definiert, nämlich für die Metrik g, die einmal durch die Matrix gij und einmal
durch die inverse Matrix g ij dargestellt wird. Ist das mit (9.62) konsistent? Mit anderen Worten, gilt diese
Gleichung auch, wenn wir dort Bij = gij und B ij = g ij setzen?
Aufgabe 9.20 Auf dem dreidimensionalen Vektorraum aus Aufgabe 9.5 sei eine Metrik durch ihre Komponenten g11 = g22 = g33 = 1 und g12 = g23 = g31 = 0 bezüglich der Basis (e1 , e2 , e3 ) definiert. Man
bestimmte die Komponenten bezüglich der Basis (ex , ey , ez ).
Die orthogonale Gruppe
Da Orthonormalbasen in der Physik eine wichtige Rolle spielen, wollen wir uns kurz mit den Besonderheiten befassen, die beim Übergang zwischen zwei solchen Basen auftreten. Es sei also ei eine Orthonormalbasis und ea eine andere Orthonormalbasis. Da in diesem Fall beide Basen mit ihren jeweiligen dualen
Basen übereinstimmen, können wir in diesem Abschnitt alle Indizes nach unten schreiben.
Das gilt auch für die Übergangsmatrizen, so dass der Zusammenhang zwischen den Basen durch
ea = ei Λia
⇔
ei = ea Λai
(9.63)
gegeben ist. Das ergibt sich aus (9.18), wenn wir dort einfach alle Indizes nach unten schreiben. Die
Übergangsmatrizen Λia und Λai sind natürlich wieder zueinander invers, also
Λia Λaj = δij ,
⇔
Λai Λib = δab .
(9.64)
Sie können aber nicht beliebig gewählt werden. Aus der Forderung, dass mit e i auch ea eine Orthonormalbasis ist, ergibt sich folgende Bedingung an die Übergangsmatrizen,
ea · eb = (ei Λia ) · (ej Λjb ) = (ei · ej ) Λia Λjb = δij Λia Λjb = Λia Λib = δab .
14
(9.65)
Nur, wenn die Übergangsmatrix die letzte Gleichung erfüllt, bildet sie eine Orthonormalbasis wieder auf
eine Orthonormalbasis ab. Wenn man die Basen ei und ea vertauscht, findet man natürlich dieselbe Bedingung für die inverse Matrix, also
Λia Λib = δab
⇔
Λai Λbj = δij .
(9.66)
Eine Matrix mit dieser Eigenschaft heißt orthogonale Matrix. Um das in der üblichen Matrixnotation
aufzuschreiben, schreiben wir für die Übergangsmatrizen
Λ = Λai ,
Λ−1 = Λia ,
(9.67)
wobei der erste Index als Zeilenindex, der zweite als Spaltenindex zu lesen ist. Die zweite Gleichung in
(9.66) lautet dann
Λ Λ> = I ⇔ Λ> = Λ−1 ,
(9.68)
wobei I die N ×N -Einheitsmatrix ist, die durch das Kronecker-Symbol dargestellt wird, und Λ > die
transponierte Matrix ist, die durch das Vertauschen von Zeilen und Spalten entsteht. Die erste Gleichung
in (9.66) ist dazu äquivalent und macht dieselbe Aussage über die inverse Matrix Λ −1 .
Eine orthogonale Matrix Λ hat also die Eigenschaft, dass sie zu ihrer transponierten Matrix Λ > invers
ist. Die Menge aller dieser Matrizen bildet eine Gruppe, die man mit O(N ) bezeichnet und orthogonale
Gruppe der Dimension N nennt.
Aufgabe 9.21 Man beweise das. Zu zeigen ist dazu, dass die Einheitsmatrix orthogonal ist, also I ∈
O(N ), dass mit jeder Matrix Λ ∈ O(N ) auch die inverse Matrix Λ−1 ∈ O(N ) orthogonal ist, und dass
mit je zwei orthogonalen Matrizen Λ1 , Λ2 ∈ O(N ) auch das Produkt Λ1 Λ2 ∈ O(N ) orthogonal ist.
Wir können hier nicht die gesamte Theorie der orthogonalen Gruppe erarbeiten, wollen aber kurz die
wichtigsten Eigenschaften zusammenstellen. Diese lassen sich bereits an der Gruppe O(2) ablesen, also
der Gruppe aller orthogonalen Transformation in einem zweidimensionalen Vektorraum. Wir setzen
a b
a c
>
Λ=
⇒ Λ =
.
(9.69)
c d
b d
Die Bedingung (9.68) lautet in diesem Fall
2
a b
a c
a + b2 a c + b d
1 0
>
ΛΛ = I ⇔
=
.
c d
b d
a c + b d c 2 + d2
0 1
(9.70)
Komponentenweise ausgeschrieben,
a2 + b2 = 1,
c2 + d2 = 1,
a c + b d = 0.
(9.71)
Die ersten beiden Gleichungen lassen sich durch den Ansatz a = cos α, b = sin α, c = sin β und d = cos β
lösen. Die dritte Gleichung lautet dann
cos α sin β + sin α cos β = sin(α + β) = 0,
also α + β = 0 oder α + β = π. Eingesetzt ergibt das
cos α sin α
Λ = D(α) =
oder
− sin α cos α
15
Λ = S(α) =
cos α
sin α
sin α − cos α
(9.72)
.
(9.73)
replacements
(c)
(d)
ey
ey
eu
eu
α
α
ex
ex
ev
ev
(b)
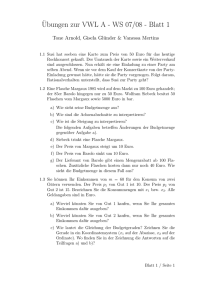
(a)
Abbildung 9.2: In einem zweidimensionalen metrischen Vektorraum gibt es orthogonale Basistransformationen ohne (a) und mit (b) Spiegelung. Beide werden durch einen Winkel α parametrisiert.
Die erste Übergangsmatrix beschreibt eine Drehung der Basis um den Winkel α. Wählen wir als Indexmenge a ∈ {u, v} und i ∈ {x, y}, so lautet die explizite Transformation der Basisvektoren
eu = cos α ex + sin α ey ,
ev = − sin α ex + cos α ey .
(9.74)
Die zweite Möglichkeit in (9.73) entspricht einer Drehung mit anschließender Spiegelung,
eu = cos α ex + sin α ey ,
ev = sin α ex − cos α ey .
(9.75)
Es gibt also zwei Arten von orthogonalen Basistransformationen, nämlich solche, die die Orientierung der
Basis erhalten und solche, die sie umkehren.
Das gilt in jeder Dimension, wobei sich anhand der Determinante der Übergangsmatrix entscheiden
lässt, ob die Orientierung erhalten bleibt oder nicht. Aus (9.68) folgt nämlich
det(Λ Λ> ) = det(Λ) det(Λ> ) = det(Λ)2 = det(I) = 1
⇒
det(Λ) = ±1.
(9.76)
Hier haben wir benutzt, dass die Determinante des Produktes von zwei Matrizen das Produkt der Determinante ist, und dass die Determinante einer Matrix beim Transponieren erhalten bleibt.
Die Determinante einer orthogonalen Matrix ist also entweder +1 oder −1, wobei der positive Werte
einer Drehung der Basis ohne Spiegelung, ein negativer Wert einer Drehung der Basis mit Spiegelung
entspricht. Die Teilmenge von O(N ), die die Drehungen ohne Spiegelung enthält, bildet eine Untergruppe,
die spezielle orthogonale Gruppe SO(N ). Sie besteht aus allen orthogonalen Basistransformationen, bei
denen die Orientierung der Basis erhalten bleibt.
In der Physik ist natürlich die orthogonale Gruppe O(3) von besonderer Bedeutung. Wir werden auf sie
später noch ausführlicher eingehen. Im Prinzip gilt für sie aber dasselbe wir für O(N ) im allgemeinen.
Sie zerfällt in zwei Teilmengen, wobei die Untergruppe SO(3) die Drehgruppe ist, also alle möglichen
Drehungen der Basis enthält, aber keine Spiegelungen.
Aufgabe 9.22 Warum bilden die orthogonalen Basistransformationen ohne Spiegelung eine Untergruppe
der orthogonalen Gruppe, die Transformationen mit Spiegelung aber nicht?
Aufgabe 9.23 Man beweise, dass alle Einträge einer orthogonalen Matrix vom Betrag kleiner oder gleich
Eins sind.
16
Aufgabe 9.24 Man berechne für die Matrizen aus (9.73) die Produkte D(α) D(β), D(α) S(β),
S(α) D(β) und S(α) S(β).
Aufgabe 9.25 Wie lauten die explizit ausgeschriebenen Bedingungen (9.68) an die Eintr äge einer Matrix
U ∈ O(3)? Wie viele unabhängige Gleichungen ergeben sich, und wie viele unabhängige Parameter
bleiben übrig?
Das Kreuz- und Spatprodukt
Bei der Diskussion der Geometrie des dreidimensionalen Euklidischen Raumes hatten wir noch zwei andere Produkte von Vektoren eingeführt, nämlich das Kreuzprodukt und das Spatprodukt. Wir wollen nun
zeigen, dass auch sie eine recht einfach Darstellung als Tensoren haben.
Dazu sei V von nun an ein dreidimensionaler, metrischer Vektorraum, und e a eine Orthonormalbasis.
Für die Metrik gilt also gab = δab und g ab = δ ab . Wir definieren dann einen Tensor ω dritter Stufe, der
bezüglich dieser Basis die Komponenten
ω abc = εabc
bzw. ωabc = εabc
(9.77)
haben soll, wobei εabc bzw. εabc das Levi-Civita-Symbol ist, welches wir in (2.27) definiert hatten. Es ist
gleich +1, wenn die Indizes {a, b, c} eine gerade Permutation der vorgegebenen Indexmenge bilden, −1,
wenn sie eine ungerade Permutation bilden, und 0, wenn mindestens zwei der Indizes den gleichen Wert
annehmen. Insbesondere ist der so definierte Tensor ω total antisymmetrisch. Er ändert sein Vorzeichen
bei jeder Vertauschung von zwei Indizes,
ωabc = ωbca = ωcab = −ωacb = −ωbac = −ωcba .
(9.78)
Da wir uns in einem metrischen Vektorraum befinden, können wir Indizes wahlweise nach oben oder nach
unten schreiben. Die beiden Darstellungen (9.77) repräsentieren denselben Tensor ω, und (9.78) gilt entsprechend mit oberen Indizes. Da wir zudem eine Orthonormalbasis verwenden, sind beide Darstellungen
sogar gleich.
Eine wichtige Frage ist nun, wie die Darstellungen des Tensors ω in anderen Basen aussehen. Dazu
sei ei irgendeine andere Basis, die nicht unbedingt eine Orthonormalbasis sein muss. Dann können wir
die Komponenten ω ijk des Tensor ω in dieser Basis mit Hilfe des allgemeinen Transformationsgesetzes
ausrechnen. Es gilt
ω ijk = Λia Λjb Λkc ω abc .
(9.79)
Natürlich ist der Term auf der rechten Seite wieder total antisymmetrisch, das heißt er ändert sein Vorzeichen bei jeder Vertauschung von zwei Indizes. Er ist daher bis auf eine Konstante bestimmt und proportional zum Levi-Civita-Symbol εijk . Wir müssen nur noch die Konstante finden.
Aufgabe 9.26 Warum ist jeder total antisymmetrische Ausdruck mit drei Indizes in einem dreidimensionalen Vektorraum proportional zum Levi-Civita-Symbol?
Um die Konstante zu finden, setzen wir den Ansatz ω ijk = c εijk in (9.79) ein und drücken die Komponenten ω abc durch (9.77) aus,
c εijk = Λia Λjb Λkc εabc .
(9.80)
Für eine fest gewählte Permutation der Zeilenindizes {i, j, k} der Übergangsmatrizen wird auf der rechten
Seite über alle Permutationen der Spaltenindizes {a, b, c} summiert. Dabei werden jeweils Produkte von
drei Matrixelementen gebildet, von denen nie zwei in einer Zeile oder zwei in einer Spalte stehen. Anschließend wird das Produkt mit einem Vorzeichen versehen, welches davon abhängt, ob die Permutation
der Spaltenindizes {a, b, c} gerade oder ungerade ist.
17
Das ist die Definition der Determinante einer Matrix. Die Zahl c ist demnach die Determinante der
Übergangsmatrix Λia , und es gilt
ω ijk = det(Λia ) εijk ,
ωijk = det(Λai ) εijk .
(9.81)
Die zweite Gleichung für die Darstellung mit unteren Indizes folgt dabei aus der analogen Überlegung, bei
der wir die Darstellung mit unteren Indizes transformieren. Es tritt dabei die inverse Transformationsmatrix
auf, und daher auch deren Determinante.
Daraus können wir unmittelbar folgenden Schluss ziehen. Wenn wir die Basis e a , von der wir ausgegangen sind, als positiv orientiert definieren, dann hat die Tensor ω in jeder positiv orientierten Orthonormalbasis ei die Darstellung
ω ijk = εijk bzw. ωijk = εijk .
(9.82)
Die Basis ea , von der wir ausgegangen sind, ist also in keiner Weise speziell. Wir hätten jede andere
Orthonormalbasis mit der gleichen Orientierung als Ausgangspunkt nehmen können, um den Tensor ω
durch (9.77) zu definieren.
Wir finden aber, dass der Tensor ω in einer negativ orientierten Orthonormalbasis e i eine andere Darstellung hat, nämlich
ω ijk = −εijk bzw. ωijk = −εijk .
(9.83)
Damit können wir das, was wir weiter oben über Orthonormalbasen gesagt haben, wie folgt ergänzen
In einer positiv orientierten Orthonormalbasis gilt gij = δij und ωijk = εijk .
In einer negativ orientierten Orthonormalbasis gilt gij = δij und ωijk = −εijk .
Und wie verhält es sich mit einer Basis ei , die keine Orthonormalbasis ist? In diesem Fall gibt es einen
sehr eleganten Trick, mit dem man den Tensor ω darstellen kann, ohne die Übergangsmatrizen explizit
benutzen zu müssen. Wir betrachten dazu eine andere Determinante, nämlich die der Matrix g ij . Wir
können diese wie folgt definieren,
g = det(gij ) =
1 ikm jln
ε ε gij gkl gmn .
6
(9.84)
Wenn man hier die Summen über die Indizes {j, l, n} explizit ausschreibt, ergeben sich wieder die Summen über alle Permutationen von Zeilen- und Spaltenindizes der Matrix g ij , wobei immer nur solche
Matrixelemente multipliziert werden, die nicht zusammen in einer Zeile oder einer Spalte stehen. Der
Faktor 6 tritt auf, weil wir anschließend auch noch über die Indizes {i, k, m} summieren.
Die Determinante g der Metrik ist kein Skalar, denn die Levi-Civita-Symbole zu verschiedenen Basen
sind nicht verschiedene Darstellungen eines Tensor. Genau das haben wir ja gerade widerlegt. Wir können
aber nun den folgenden Ausdruck bilden,
1 ikm jln
ω ω gij gkl gmn = 1.
6
(9.85)
In diesem Fall ist die linke Seite ein Skalar, denn sie entsteht durch Multiplikation und Kontraktion aus
Tensoren. Sie hat folglich in jeder Basis denselben Wert. In einer Orthonormalbasis ergibt sich der Wert 1,
folglich ist dies der Wert in jeder Basis. Durch Vergleich von dieser Gleichung mit (9.84) ergibt sich nun
1
ω ijk = ± √ εijk ,
g
√
bzw. ωijk = ± g εijk .
(9.86)
Der zweite Ausdruck folgt wieder aus einer analogen Überlegung für die Darstellung mit unteren Indizes.
Nur das Vorzeichen bleibt unbestimmt. Es hängt auch hier wieder von der Orientierung der Basis ab, das
18
heißt darüber entscheidet die Determinante der Übergangsmatrix. Wir müssen irgendeine Basis auswählen
und diese als positiv orientiert definieren, dann gilt in dieser und in allen anderen Basen mit der gleichen
Orientierung das positive Vorzeichen, in allen anderen das negative. Für den Spezialfall einer Orthonormalbasis stimmt dies natürlich mit dem Ergebnis von oben überein, denn dann ist g ij = δij , uns somit die
Determinante g = 1.
Für den Tensor ω führen wir die Bezeichnung antisymmetrischer Einheitstensor ein. Seine Definition
lässt sich leicht auf einen N -dimensionalen metrischen Vektorraum verallgemeinern, und es gelten die
gleichen Darstellungen, wenn man entsprechend ein Levi-Civita-Symbol mit N Indizes einführt. Voraussetzung für für die Existenz dieses Tensors ist allerdings eine Metrik, denn sonst gibt es keine ausgezeichneten Basen, nämlich die Orthonormalbasis, die wir zur Definition verwendet haben.
In jedem metrischen Vektorraum gibt es einen bis auf das Vorzeichen eindeutig definierten
antisymmetrischen Einheitstensor.
Nun können wir die Definition des Kreuz- und Spatproduktes reproduzieren und als Tensoroperationen
darstellen. Hier ist sogar das Spatprodukt das einfachere. Es ist diejenige Abbildung, die durch den Tensor
ω in Sinne der Aufgabe 9.13 definiert wird, nämlich
√
ω(x, y, z) = ωijk xi y j z k = ± g εijk xi y j z k .
(9.87)
Das Vorzeichen ist durch die Orientierung der Basis festgelegt, und für eine positiv orientierte Orthonormalbasis gilt offenbar der bekannte Ausdruck εijk xi yj zk , wenn wir alle Indizes nach unten schreiben.
Wir können nun aber auch das Spatprodukt in jeder anderen Basis berechnen. Eine sehr praktische Anwendung dafür wird sich im nächsten Kapitel ergeben, wenn wir Integrationen ausführen. Wir können
damit nämlich das Volumen eines Spates ausrechnen, ohne dazu auf eine Orthonormalbasis zurückgreifen
zu müssen.
Das Kreuzprodukt ist nun ebenfalls leicht darzustellen. Wir setzen
√
x × y = ωijk xi y j ek = ± g εijk xi y j ek .
(9.88)
Auch hier ergibt sich in einer positiv orientierten Orthonormalbasis wieder der bekannte Ausdruck
εijk xi yj ek , wenn wir alle Indizes nach unten schreiben. Man beachte jedoch, dass in (9.88) der duale Basisvektor ek steht, so dass, wenn wir die Vektoren x und y einer bestimmten Basis darstellen, das
Kreuzprodukt x × y zunächst in der dualen Basis dargestellt wird. Aber wir können dies natürlich mit
Hilfe der Metrik umrechnen. In Komponenten ausgeschrieben gilt
x×y =z
⇔
z i = g ij ωjkl xk y l .
(9.89)
Das Kreuzprodukt wird also genau genommen durch eine Kombination des antisymmetrischen Einheitstensor mit der Metrik gebildet.
Aufgabe 9.27 Man zeige, dass das hier definierte Kreuzprodukt alle bekannten Eigenschaften hat. Es ist
antisymmetrisch und das Produkt von zwei Vektoren steht auf beiden senkrecht. Außerdem gilt in einer
positiv orientierten Orthonormalbasis ei × ej = εijk ek .
Aufgabe 9.28 Man zeige, dass mit den hier vorgenommenen Definitionen f ür das Spatprodukt
η(x, y, z) = (x × y) · z gilt.
Aufgabe 9.29 Man leite die jeweils zweite Gleichung in (9.86) und (9.81) her.
19
Aufgabe 9.30 Da die beiden Ausdrücke in (9.86) zwei Darstellungen desselben Tensors in einem metrischen Vektorraum sind, sollte es möglich sein, die eine aus der anderen durch Hoch- bzw. Runterziehen
der Indizes zu bekommen. Man bestätige dies, also
ωikm = gij gkl gmn ω ilm .
(9.90)
Aufgabe 9.31 Die drei Basisvektoren ei eine dreidimensionalen metrischen Vektorraums spannen, wenn
sie keine Orthonormalbasis bilden, keinen Würfel, sondern einen Spat auf. Wie groß ist das Volumen dieses
Spates?
Aufgabe 9.32 Es sei V ein nicht notwendigerweise metrischer, dreidimensionaler Vektorraum. Man zeige,
dass durch
Ωijk lmn = εikm εjlm
(9.91)
ein invarianter Tensor Ω der Stufe (3, 3) definiert wird, und dass folglich f ür jeden Tensor A der Stufe
(1, 1) die Größe
1
(9.92)
det(A) = εikm εjlk Aij Akl Amn
6
ein Skalar ist, und zwar die Determinante der Matrix Aij . Was ist der wesentliche Unterschied zwischen
dieser Definition einer Determinante und der Determinante der Metrik (9.84)? Warum handelt es sich dort
nicht um einen Skalar? Gibt es eine alternative Definition von Ω, die explizit deutlich macht, dass es sich
um einen Tensor handelt?
20
10 Tensorfelder
Im letzten Kapitel haben wir Tensoren nur im Zusammenhang mit Vektorräumen diskutiert. In physikalischen Theorien tauchen Tensoren aber meistens in Form Tensorfelder auf, zum Beispiel als Kraftfelder auf
dem physikalischen Raum. Unter einem Feld verstehen wir eine Abbildung, die jedem Punkt des Raumes
eine Zahl, einen Vektor, oder eben einen Tensor bestimmter Stufe zuordnet. In diesem Kapitel wollen wir
uns mit der Darstellung von solchen Feldern in verschiedenen Koordinatensystemen beschäftigen.
Insbesondere geht es darum, das Transformationsverhalten von Tensorfeldern bei Koordinatentransformationen zu verstehen, das wir im letzten Kapitel anhand von Basistransformationen in Vektorräumen
diskutiert haben. In physikalischen Anwendungen müssen wir oft spezielle Koordinatensysteme wählen,
die dem gestellten Problem angepasst sind, um überhaupt einer Lösung näher zu kommen. Zum Beispiel
konnten wir das Kepler-Problem, also die Bewegungsgleichung für einen Planeten im Sonnensystem, erst
durch den Übergang zu Kugelkoordinaten lösen.
Kugelkoordinaten sind krummlinige Koordinaten. Das bereitete ein paar Schwierigkeiten, da wir, bevor
wir die Bewegungsgleichungen explizit aufstellen konnten, erst einmal Größen wir Geschwindigkeit und
Beschleunigung in solchen Koordinaten darstellen mussten. Um solche Rechnungen nicht für jedes neue
Koordinatensystem noch einmal durchführen zu müssen, wollen wir hier eine Art Rezeptsammlung für
den Umgang krummlinigen Koordinatensystem bereitstellen. Das Tensorkalkül ist dafür die geeignete
Sprache.
Wir werden zuerst nur affine Koordinatensystem betrachten und zeigen, dass sich das Transformationsverhalten von Tensorfeldern in solchen Koordinatensystem unmittelbar auf das Transformationsverhalten
beim Basiswechsel zurückführen lässt. Anschließend werden wir dies verallgemeinern und zeigen, dass in
krummlinigen Koordinatensystemen ein ganz ähnliches Verhalten gilt. Schwierigkeiten mach dort nur das
Ableiten, so dass wir dazu eine spezielle kovariante Ableitung einführen müssen.
Mit ihr werden wir in der Lage sein, viele der Ergebnisse, zu denen wir früher erst nach mühsamen
Rechnungen gekommen sind, durch sehr einfaches Einsetzen von nur ein paar wenigen zu bestimmenden
Größen zu reproduzieren. Dazu gehören zum Beispiel die Ausdrücke für Geschwindigkeit und Beschleunigung in Kugelkoordinaten, oder auch die für den Laplace-Operator oder die Divergenz oder Rotation
eines Vektorfeldes in verschiedenen krummlinigen Koordinatensystemen.
Vektoren und duale Vektoren
Wir erinnern uns, dass ein affiner Raum E eine Menge von Punkten ist, der ein Vektorraum V zugeordnet
ist, so dass zu je zwei Punkten ein Abstandsvektor existiert. Um die Notation etwas besser an die aus
dem letzten Kapitel anzupassen, bezeichnen wir die Punkte jetzt auch mit fett gedruckten Buchstaben
a, b, . . . ∈ E. Außerdem schreiben wir für den Abstandsvektor, der von a ∈ E nach b ∈ E zeigt, einfach
b − a ∈ V.
Obwohl es sich dabei nicht wirklich um das Bilden einer Differenz handelt, ist die Notation sehr naheliegend. Entsprechend können wir den Punkt, der aus a ∈ E durch Verschiebung um einen Vektor v ∈ V
entsteht, mit a + v ∈ E bezeichnen. Es gilt dann zum Beispiel a + (b − a) = b, und es gelten auch sonst
die üblichen Rechenregeln wie bei der gewöhnlichen Addition und Subtraktion von Vektoren. Wir müssen
nur darauf achten, dass wir nicht zwei Punkte addieren können, und dass wir Punkte nicht mit Zahlen
multiplizieren können. Für a, b ∈ E und s ∈ R ergeben die Ausdrücke a + b oder s a keinen Sinn.
Wir ersetzen außerdem das Symbol V für den zugeordneten Vektorraum durch die Bezeichnung TE, was
soviel bedeutet wie Tangentenraum von E. Die Bezeichnung rührt daher, dass der zugeordnete Vektorraum
TE als die Menge aller Tangentenvektoren von Kurven in E betrachtet werden kann. Eine Kurve ist eine
differenzierbare Abbildung λ : R → E, deren Ableitung ein Vektor ist, nämlich der Tangentenvektor
λ0 (s) =
λ(s + ) − λ(s)
dλ
= lim
.
→0
ds
21
(10.1)
Im Zähler steht ein Abstandsvektor von zwei Punkten, so dass der Grenzwert im Vektorraum TE gebildet
wird. Der Tangentenvektor einer Kurve ist also auf ganz natürliche Weise ein Vektor, ohne das wir dafür
zuerst ein Koordinatensystem einführen müssen, um die Ableitungen auf die Koordinatendarstellung der
Kurve anzuwenden.
Es gibt nun eine ebenso natürliche Definition des zu TE dualen Vektorraumes T ∗ E. Dazu betrachten
wir ein skalares Feld, also eine Abbildung φ : E → R. Wir definieren die Richtungsableitung von φ an
der Stelle r ∈ E in Richtung des Vektors v ∈ TE wie folgt. Wie werten das Feld φ entlang der Kurve
s 7→ r + s v aus, und bilden von dieser Funktion die Ableitung an der Stelle s = 0. Das Ergebnis
bezeichnen wir mit
φ(r + v) − φ(r)
dφ(r + s v) .
(10.2)
v · ∇φ(r) =
= lim
→0
ds
s=0
Aufgabe 10.1 Man zeige, dass die rechte Seite von (10.2) für festes r ∈ E eine lineare Funktion von
v ∈ TE ist, wenn die Funktion φ hinreichend glatt ist, so dass Grenzwerte beliebig vertauscht werden
können.
Demnach wird, wenn wir den Punkt r ∈ E festhalten, durch
∇φ(r) :
TE → R,
v 7→ v · ∇φ(r)
(10.3)
eine lineare Abbildung definiert. Diese lineare Abbildung heißt Gradient von φ an der Stelle r. Für jedes r
ist folglich ∇φ(r) ∈ T∗ E, das heißt der Gradient ist ein dualer Vektor, oder genauer ein duales Vektorfeld
auf E.
In einem affinen Raum sind Vektoren die Tangentenvektoren von Kurven, und duale Vektoren die Gradienten von skalaren Feldern.
Tatsächlich besteht zwischen den beiden Objekten eine Art Symmetrie, denn ein Tangentenvektor ist die
Ableitungen einer Kurve, also einer Abbildung R → E in den affinen Raum hinein, während der Gradient
die Ableitung eines skalaren Feldes ist, also einer Abbildung E → R aus dem affinen Raum hinaus.
Beide Objekte lassen sich in natürlicher Weise miteinander kombinieren, nämlich indem wir die Ableitung eines Feldes φ : E → R entlang einer Kurve λ : R → E berechnen. Das ist die Ableitung einer
gewöhnlichen Funktion R → R, nämlich
dφ(λ(s))
= λ0 (s) · ∇φ(λ(s)).
ds
(10.4)
Sie wird gebildet, indem man der Tangentenvektor der Kurve mit dem Gradienten des Feldes multipliziert,
und zwar im Sinne der natürlichen Produktes eines Vektors mit einem dualen Vektor. Wie hier schreiben
wir den Vektor auch gelegentlich als erstes Argument, und den dualen Vektor als zweites Argument. Da
die Beziehung zwischen einem Vektorraum und seinem Dualraum symmetrisch ist, spielt das keine Rolle.
Aufgabe 10.2 Man mache sich auch hier noch einmal klar, dass der Punkt in (10.4) kein Skalarprodukt ist,
der affine Raum E also kein metrischer Raum sein muss, um eine solche Ableitung eines skalaren Feldes
entlang einer Kurve zu bilden.
Affine Koordinaten
Um Kurven und Felder explizit zu beschreiben, müssen wir ein Koordinatensystem verwenden. Ein affines
Koordinatensystem wird durch die Wahl eines Ursprungs o ∈ E und einer Basis e i von TE festgelegt. Jeder
Punkt r ∈ E lässt sich dann eindeutig durch einen Satz von Koordinaten r i identifizieren,
r = o + r i ei ,
r i = (r − o) · ei .
22
(10.5)
Man beachte, dass die Koordinaten r i jetzt einen oberen Index tragen, da es sich um die Komponenten
eines Vektors r − o ∈ TE handelt.
Eine sehr geschickte Art, den Zusammenhang zwischen dem Koordinatensystem auf E und der zugehörigen Basis ei von TE auszudrücken, ergibt sich aus der folgenden Beobachtung. Wir betrachten den
Punkt r ∈ E als eine Funktion der reellen Zahlen {r i }. Das Koordinatensystem ist eine Abbildung
RN → E :
{r i }
r({r i }) = o + r i ei ,
7→
(10.6)
mit N = dim E. Wenn wir die partiellen Ableitungen dieser Funktion r nach den Koordinaten r i bilden,
finden wir
∂r
= ei .
(10.7)
∂r i
Die Basisvektoren ei von TE, die zu einem affinen Koordinatensystem gehören, sind die
partiellen Ableitungen des Punktes r nach den Koordinaten r i .
Dafür gibt es auch eine sehr anschauliche geometrische Erklärung. Die Basisvektoren e i sind die Tangentenvektoren der Koordinatenlinien. Eine Koordinatenlinie ist eine Kurve, die dadurch definiert ist, dass
alle bis auf eine Koordinate konstant sind, und die verbleibende Koordinate als Kurvenparameter aufgefasst wird. In einem affinen Koordinatensystem sind die Koordinatenlinien die Geraden, die parallel zu
den Achsen liegen. Der Tangentenvektor einer solchen Koordinatenlinie ist die Ableitung nach dem Kurvenparameter, also genau die partielle Ableitung ∂r/∂r i , bei der eine Koordinaten variiert wird und alle
anderen festgehalten werden.
Mit diesem Trick können wir den Tangentenvektor einer Kurve sehr leicht berechnen. Die Kurve λ(s)
wird durch ihre Koordinatendarstellung λi (s) beschrieben, also durch eine Verkettung einer Funktion R →
RN : s → {λi (s)} mit der Koordinatenabbildung {r i } 7→ r. Folglich gilt für die Ableitung die Kettenregel
∂r dλi
dλ
= i
= ei λ0i (s).
(10.8)
λ0 (s) =
ds
∂r = (s) ds
Die Komponenten des Tangentenvektors sind durch die Ableitungen der Koordinatenfunktionen gegeben.
Das ist natürlich nichts neues, denn so hatten ursprünglich den Tangentenvektor einer Kurve definiert. Mit
Hilfe der Darstellung (10.7) lässt sich das offenbar sehr geschickt reproduzieren.
Entsprechend wird ein skalares Feld durch eine Funktion φ({r i }) der Koordinaten dargestellt. Betrachten wir wieder die Richtungsableitung des Feldes an der Stelle r ∈ E in Richtung eines Vektors v ∈ TE,
so finden wir mit der Kettenregel
∂φ({r i })
dφ({r i + s v i }) dφ(r + s v) =
= vi
= v i ∂i φ(r).
(10.9)
v · ∇φ(r) =
s=0
s=0
ds
ds
∂r i
Daraus folgt, dass die partiellen Ableitungen ∂φ/∂r i an der Stelle r die Komponenten des Gradienten
∇φ(r) bezüglich der dualen Basis ei sind. Wir benutzen dafür die abkürzende Schreibweise ∂i = ∂/∂r i ,
also
∇φ(r) = ∂i φ(r) ei .
(10.10)
Der Index bei ∂i steht unten, weil es sich um die Komponenten eines dualen Vektors handelt.
Für die Ableitung eines Feldes entlang einer Kurve gilt schließlich in der Koordinatendarstellung
dφ(λ(s))
= λ0 (s) · ∇φ(λ(s)) = λ0i (s) ∂i φ(λ(s)).
ds
(10.11)
Das können wir wieder als Tensoroperation verstehen. Wir haben einen Tensor der Stufe (1, 0) mit einem
Tensor der Stufe (0, 1) multipliziert und anschließend die kontrahiert. Das Ergebnis ist ein Tensor der Stufe
(0, 0), also ein Skalar.
23
Aufgabe 10.3 Es sei E ein zweidimensionaler affiner Raum, auf dem die affinen Koordinaten (x, y) definiert sind. Wir betrachten eine Kurve λ und ein skalares Feld φ, gegeben durch
x(s) = cosh(s),
y(s) = sinh(s),
φ(x, y) = x2 − y 2 .
(10.12)
Man stelle den Tangentenvektor der Kurve in der Basis (ex , ey ), und den Gradienten des Feldes in der
dualen Basis (ex , ey ) dar. Man bestimme daraus die Ableitung des Feldes entlang der Kurve und überprüfe
das Ergebnis durch direktes Nachrechnen, also durch Ableiten der Funktion φ(s) = φ(x(s), y(s)) nach s.
Aufgabe 10.4 Man zeige, dass sich auch die dualen Basisvektoren als Ableitungen ausfassen lassen. Dazu
betrachtet man die Koordinaten r i als reelle Funktionen auf E. Dann ist ∇r i = ei , das heißt die dualen
Basisvektoren sind die Gradienten der Koordinaten.
Koordinatentransformationen
Wir wollen nun zeigen, dass sich die gerade eingeführten Objekte tatsächlich wie Tensoren verhalten.
Dazu müssen wir untersuchen, was bei einer Koordinatentransformation passiert, die ja gleichzeitig einen
Basiswechsel impliziert.
Es sei ein “altes” Koordinatensystem gegeben, in dem wir die Koordinaten eines Punktes r mit r i
bezeichnen. Die “neuen” Koordinaten r a desselben Punktes definieren wir dadurch, dass wir entweder die
alten Koordinaten als Funktion der neuen schreiben, oder umgekehrt die neuen als Funktion der alten.
Beim Übergang von einem affinen Koordinatensystem zu einem anderen handelt es sich dabei um eine
affine Abbildung, also
(10.13)
r i = Λia r a + ξ i ⇔ r a = Λai r i + ξ a .
Eine affine Koordinatentransformation besteht aus einer linearen Abbildung mit Verschiebung. Damit die
beiden Gleichungen (10.13) äquivalent sind, muss gelten
Λai Λib = δ ab ,
Λai ξ i + ξ a = 0.
(10.14)
Die Übergangsmatrizen sind wieder zueinander invers, und die Verschiebungen müssen sich gegeneinander aufheben, wenn wir die eine zuerst mit der Übergangsmatrix transformieren.
Aufgabe 10.5 Man zeige, dass ξ i die alten Koordinaten des neuen Ursprungs sind, und ξ a die neuen Koordinaten des alten Ursprungs. Die additiven Terme in (10.13) sind also die Darstellungen von Vektoren, die
angeben, wohin der Ursprung des Koordinatensystems verschoben wird.
Betrachten wir nur die Beziehungen (10.13) zwischen den Koordinaten, so stellen wir fest, dass sich die
Übergangsmatrizen Λia und Λai wieder sehr geschickt als partielle Ableitungen schreiben lassen, nämlich
als die der neuen Koordinaten nach den alten oder umgekehrt,
Λia
∂r i
= a,
∂r
Λai
∂r a
= i.
∂r
(10.15)
Dass die beiden Matrizen zueinander invers sind, ergibt sich dann ganz einfach aus der Kettenregel,
Λai Λib =
∂r a
∂r a ∂r i
=
= δ ab .
∂r i ∂r b
∂r b
(10.16)
Außerdem können wir daraus sehr leicht die Transformation der zugehörigen Basis ableiten. Es gilt in
beiden Koordinatensystemen, dass die zugehörige Basis von TE durch die partiellen Ableitungen des
Punktes nach den Koordinaten gegeben sind,
∂r
ei = i ,
∂r
∂r ∂r i
∂r
ea = a = i a = ei Λia .
∂r
∂r ∂r
24
(10.17)
px
pu
p
p
pv
py
ev
ey
v
y
r
r
eu
ex
u
x
(b)
(a)
Abbildung 10.1: Bei einer affinen Koordinatentransformation gelten für die Koordinaten eines Punktes
r ∈ E die Transformationen (10.13), die sich aus einer Verschiebung und einer Basistransformation
zusammensetzen. Für die Komponenten eines Vektors p ∈ TE ist jedoch nur die Basistransformation
relevant.
Wir finden also das Transformationsverhalten der Basisvektoren allein durch Anwenden der Kettenregel.
Das einzige, was wir uns dazu einprägen müssen, ist die Darstellung (10.7) der Basis als Ableitung des
Punktes nach den Koordinaten.
Wir können das an einem Beispiel veranschaulichen. In einem zweidimensionalen affinen Raum sei ein
Koordinatensystem (x, y) gegeben, mit den zugehörigen Basisvektoren (e x , ey ). Ein zweites Koordinatensystem (u, v) werde durch
x = u cos α − v sin α + 1,
y = u sin α + v cos α − 1
(10.18)
definiert. Das entspricht anschaulich einer Drehung der Koordinatenachsen um einen Winkel α und einer
Verschiebung des Ursprungs um einen Vektor ex − ey . Die Beziehung (10.18) lässt sich leicht invertieren.
Es ist
u = (x − 1) cos α + (y + 1) sin α,
v = (1 − x) sin α + (1 + y) cos α.
(10.19)
Um die neuen Basisvektoren (eu , ev ) durch die alten auszudrücken, benutzen wir die Formel (10.17) und
finden
∂x
∂y
eu =
ex +
ey = cos α ex + sin α ey ,
∂u
∂u
∂y
∂x
ex +
ey = − sin α ex + cos α ey .
(10.20)
ev =
∂v
∂v
Wir müssen also gar nicht erst die Übergangsmatrizen berechnen, sondern können direkt die partiellen Ableitungen der alten Koordinaten nach den neuen benutzen, um die Basisvektoren ineinander umzurechnen.
Wir finden natürlich wieder eine Drehung um den Winkel α. Die Verschiebung des Ursprungs macht sich
dabei nicht bemerkbar.
25
Um die Komponenten eines Vektors oder eines dualen Vektors umzurechnen, können wir genauso vorgehen. Für die Übergangsmatrizen setzen wir die partiellen Ableitungen der Koordinaten ein. Für einen
Vektor p = pi ei = pa ea und einen dualen Vektor q = qi ei = qa ea gilt
pa = Λai pi =
∂r a i
p.
∂r i
qa = qi Λia = qi
∂r i
.
∂r a
(10.21)
Vektoren spüren von der Verschiebung des Ursprungs nichts, sondern sieht quasi nur die Drehung der
Basis. Als einfache Regel gilt auch hier, dass wir nur die “passende” partielle Ableitung bilden müssen,
so dass die Summenkonvention zur Anwendung kommt. Im Zähler steht die Koordinate mit einem oberen
Index, im Nenner fungiert der Koordinatenindex dagegen als unterer Index, wie wir dies schon bei der
Definition des Gradienten gesehen haben.
Es ergibt sich dann ganz von selbst, dass der Gradient eines skalaren Feldes wie ein dualen Vektor, und
der Tangentenvektor einer Kurve wie ein Vektor transformiert. Es handelt sich in beiden Fällen um eine
einfache Anwendung der Kettenregel, nämlich
∂a φ =
∂φ ∂r i
∂φ
i
=
a = ∂i φ Λ a
i
∂r a
∂r
∂r
bzw. λ0a =
∂λa
∂r a ∂λi
= i
= Λai λ0i .
∂s
∂s
∂r
(10.22)
Aufgabe 10.6 In dem affinen Raum aus Aufgabe 10.3 sei ein zweites Koordinatensystem (u, v) durch
u = 1 + x + y,
v =1+x−y
(10.23)
definiert. Welche Beziehung besteht dann zwischen den alten Basisvektoren (e x , ey ) und den neuen Basisvektoren (eu , ev )? Wie lautet die Darstellung der Kurve durch u(s) und v(s) in dem neuen Koordinatensystem, und wie die des Feldes φ(u, v)? Welche Darstellung hat der Tangentenvektor der Kurve in der Basis
(eu , ev ), und welche der Gradient des Feldes in der dualen Basis (eu , ev )?
Tensorfelder
Wir können nun den Begriff des Feldes auf einem affinen Raum erweitern, indem wir nicht nur skalare
Felder und deren Gradienten betrachten, sondern ganz allgemein Tensorfelder.
Ein Tensorfeld auf einem affinen Raum ist eine Abbildung, die jedem Punkt einen Tensor
zurordnet.
Ein Tensorfeld der Stufe (m, n) definiert also eine Abbildung E → T(m,n) E, wobei T(m,n) E den Raum
aller Tensoren der Stufe (m, n) auf dem Vektorraum TE bezeichnet.
Ein Vektorfeld F ist in diesem Sinne ein Tensorfeld der Stufe (1, 0), das jedem Punkt r ∈ E einen Vektor
F (r) ∈ TE zuordnet. Typische Beispiel für solchen Vektorfelder kennen wir bereits aus der elementaren
Mechanik. Kraftfelder wie zum Beispiel das elektrische Feld oder das Gravitationsfeld sind Vektorfelder
auf dem physikalischen Ortsraum. Eigentlich sind wir mit diesem Konzept also schon vertraut.
Ein Tensorfeld ist nur die naheliegende Verallgemeinerung eines Vektorfeldes. Es umfasst skalare Felder
als Tensorfelder der Stufe (0, 0), die Vektorfelder selbst als Tensorfelder der Stufe (1, 0), sowie duale
Vektorfelder der Stufe (0, 1), die typischerweise als die Gradienten von skalaren Feldern auftreten. Mit
Hilfe des Tensorbaukastens können wir aus diesen Grundobjekten Tensorfelder beliebiger Stufe bilden,
indem wir sie addieren, multiplizieren und kontrahieren.
Um ein Tensorfeld F explizit darzustellen, müssen wir wieder ein Koordinatensystem verwenden. Ihm
kommen in diesem Fall zwei Bedeutungen zu. Zum einen treten die Koordinaten wie bei einem skalaren
Feld als Argumente auf. Das Feld wird durch eine Funktion F (r) = F ({r i }) der Koordinaten dargestellt. Zusätzlich müssen wir den Tensor selbst aber auch noch in seine Komponenten bezüglich einer
26
Basis zerlegen. Dazu verwenden wir immer die Basis ei bzw. die duale Basis ei , die zu dem gewählten
Koordinatensystem gehört.
Ein Tensorfeld der Stufe (m, n) wird also explizit durch einen Satz von (dim E) m+n Funktionen dargestellt, die jeweils von dim E reellen Variablen abhängen,
k
F (r) = F i ··· jk ··· l ({r i }) ei ⊗ · · · ⊗ ej ⊗ e
⊗ ·{z
· · ⊗ e}l .
|
{z
} |
(10.24)
n
m
Für ein Vektorfeld oder ein duales Vektorfeld ergeben sich auf diese Weise dim E Funktionen von dim E
Variablen, im Falle des dreidimensionalen Ortsraumes also drei Funktionen von drei Variablen. Auch
das sollte uns schon vertraut sein. Ein Kraftfeld wird durch drei Funktionen von drei Variablen explizit
dargestellt.
Beim Übergang von einem Koordinatensystem zu einem anderen ist nun zu beachten, dass sich sowohl
die Koordinaten, die als Argumente auftreten, als auch die Basisvektoren transformieren. Am besten machen wir uns das zuerst an einem nicht ganz trivialen Beispiel klar, das auch als kleine Rechenübung dient.
In einem zweidimensionalen Raum sei ein Vektorfeld F gegeben, das wie folgt im Koordinatensystem
(x, y) dargestellt wird,
F = (x + y) ex + (x − y − 2) ey ,
oder
F x = x + y,
F y = x − y − 2.
(10.25)
In Abbildung 10.2(a) ist dieses Vektorfeld grafisch dargestellt, indem an den Gitterpunkten des Koordinatensystems jeweils der Wert des Feldes als Pfeil dargestellt ist.
Wir wollen dieses Vektorfeld in das durch (10.18) definierte Koordinatensystem (u, v) umrechnen. Dazu
gehen wir in zwei Schritten vor. Zuerst schreiben wir die Komponenten F x und F y als Funktionen von u
und v. Das ergibt
F x = (u − v) sin α + (u + v) cos α,
F y = (u − v) cos α − (u + v) sin α.
(10.26)
Diese rechnen wir jetzt in die Komponenten F u und F v um, indem wir die allgemeine Formel (10.21) für
die Umrechnung der Vektorkomponenten verwenden,
Fu =
∂u x
∂u y
F (u, v) +
F (u, v)
∂x
∂y
= cos α ((u − v) sin α + (u + v) cos α) + sin α ((u − v) cos α − (u + v) sin α)
= cos(2 α) (u + v) + sin(2 α) (u − v),
Fv =
∂v x
∂v y
F (u, v) +
F (u, v)
∂x
∂y
= − sin α ((u − v) sin α + (u + v) cos α) + cos α ((u − v) cos α − (u + v) sin α)
= cos(2 α) (u − v) − sin(2 α) (u + v).
(10.27)
Aufgabe 10.7 Man beweise die folgenden trigonometrischen Formeln, die bei dieser Rechnung verwendet
wurden,
2 sin α cos α = sin(2 α),
cos2 α − sin2 α = cos(2 α).
(10.28)
√
Setzen wir speziell α = π/8, so ist sin(2 α) = cos(2 α) = 1/ 2. Die Komponenten nehmen dann eine
besonders einfache Form an, und das Vektorfeld hat in dem neuen Koordinatensystem die Darstellung
√
√
√
√
(10.29)
F = 2 u eu − 2 v ev , oder F u = 2 u, F v = − 2 v.
27
y
v
replacements
u
x
(c)
(d)
(b)
(a)
Abbildung 10.2: Dasselbe Vektorfeld, dargestellt in zwei verschiedenen Koordinatensystemen.
Dieses Koordinatensystem ist in Abbildung 10.2(b) dargestellt. Tatsächlich sieht das Vektorfeld dort etwas
einfacher aus als in der Abbildung (a). Durch die spezielle Wahl des Winkels α lässt sich das Koordinatensystem also besser an das Vektorfeld anpassen.
Nach dem gleichen Prinzip lässt sich die Umrechnung eines beliebigen Tensorfeldes von einem Koordinatensystem in ein anderes in zwei Schritte zerlegen. Man rechnet zuerst die Koordinaten um, von denen
der Tensor abhängt, und transformiert anschließend die Komponenten in die neue Basis. Dabei müssen
wir jeden einzelnen Index transformieren, und dazu die Formeln (10.21) entsprechend verallgemeinern.
Das allgemeine Transformationsgesetz für ein Tensorfeld F der Stufe (m, n) lautet
F a ··· bc ··· d (r) =
∂r a
∂r b i ··· j
∂r k
∂r l
·
·
·
F
(r)
,
·
·
·
k ··· l
∂r c
∂r i
∂r j
∂r d
(10.30)
wobei der Punkt r, an dem das Feld ausgewertet wird, links als Funktion der Koordinaten r a , rechts
dagegen als Funktion der Koordinaten r i darzustellen ist.
Aufgabe 10.8 Als Beispiel betrachten wir das Vektorfeld
F x (x, y, z) = −z y
F y (x, y, z) = z x,
F z (x, y, z) = x2 + y 2
(10.31)
auf dem dreidimensionalen affinen Raum mit Koordinaten (x, y, z). Ein neues Koordinatensystem werde
durch
x+y
y−x
u= √ ,
v= √ ,
w =z+d
(10.32)
2
2
definiert, wobei d irgendeine Konstante ist. Man bestimme die Komponenten F u (u, v, w), F v (u, v, w) und
F w (u, v, w) des Vektorfeldes in den neuen Koordinaten.
Genau wie Tensoren lassen sich natürlich auch Tensorfelder addieren, multiplizieren und kontrahieren.
Wir tun dies einfach punktweise. Die Summe von zwei Tensorfeldern gleicher Stufe F und G ist durch
28
(F + G)(r) = F (r) + G(r) definiert, und das Tensorprodukt durch (F ⊗ G)(r) = F (r) ⊗ G(r), jeweils
für alle Punkte r ∈ E.
Allerdings gibt es für Tensorfelder noch eine zusätzliche Grundoperation, die es für Tensoren als solche
nicht gibt. Das ist die Ableitung. Wenn wir nämlich ein beliebiges Tensorfeld wie in (10.24) durch seine
Komponenten darstellen, so können wir die partiellen Ableitungen dieser Funktionen nach den Koordinaten bilden. Als Beispiel betrachten wir ein Vektorfeld F = F k ek . Die partiellen Ableitungen der
Funktionen F k nach den Koordinaten r i bezeichnen wir wieder mit
∂i F k =
∂F k
.
∂r i
(10.33)
Da es dim E Funktionen F k gibt und dim E Koordinaten r i , können wir auf diese Weise insgesamt
(dim E)2 partielle Ableitung bilden. Es sollte nicht überraschen, dass diese Größen wieder die Komponenten eines Tensorfeldes sind.
Der Beweis erfolgt völlig analog zu (10.22). Dort hatten wir gezeigt, dass die partiellen Ableitungen
eines skalaren Feldes wie die Komponenten eines dualen Vektors transformieren. Um zu zeigen, dass
die partiellen Ableitungen (10.33) wie die eines Tensors der Stufe (1, 1) transformieren, müssen wir nur
zusätzlich für den Index k noch eine weitere Übergangsmatrix anbringen. Wir benutzen die Beziehung
Fc =
∂r c k
F ,
∂r k
(10.34)
wobei die rechte Seite als Funktion der Koordinaten r i dargestellt ist, die linke Seite dagegen als Funktion
der Koordinaten r a . Dann leiten wir beide Seiten nach r a ab, wobei wir auf der rechten Seite, da sie ja eine
Funktion der Koordinaten r i ist, dazu die Kettenregel verwenden. Das ergibt
∂F c
∂ ∂r c k ∂r i ∂ ∂r c k F = a i
F .
=
∂r a
∂r a ∂r k
∂r ∂r
∂r k
(10.35)
Nun ist aber die Übergangsmatrix ∂r c /∂r k konstant, das heißt die Ableitung wirkt nur auf F k . Daraus
folgt
∂r i ∂r c ∂F k
∂F c
⇒ ∂a F c = Λck ∂i F k Λia .
(10.36)
=
∂r a
∂r a ∂r k ∂r i
Das ist das Transformationsverhalten für einen Tensor der Stufe (1, 1). Wir können also von jedem Vektorfeld F die Ableitung bilden, und erhalten ein Tensorfeld der Stufe (1, 1), das wir mit ∇F bezeichnen.
Allgemein lässt sich zu jedem Tensorfeld F der Stufe (m, n) die Ableitung ∇F bilden, die dann ein
Tensorfeld der Stufe (m, n + 1) ist, da es einen zusätzlichen unteren Index trägt. Die Komponenten des
Feldes ∇F sind die partiellen Ableitungen der Komponenten von F nach den Koordinaten,
∂i F k ···l ···
∂F k ···l ···
.
=
∂r i
(10.37)
Außerdem können die diese Operation natürlich mehrmals ausführen, also höhere Ableitungen ∇∇F ,
∇∇∇F etc. bilden. Für Tensorfelder sind die Möglichkeiten, die sich zu deren Verknüpfung ergeben, um
eine Operation erweitert.
Die Grundoperationen für Tensorfelder sind Addition, Tensormultiplikation, Kontraktion
und Ableitung
Aufgabe 10.9 Man führe den Beweis für einen Tensor beliebiger Stufe, zeige also, dass sich die Komponenten (10.37) tatsächlich wie ein Tensor der Stufe (m, n + 1) verhalten, wenn F ein Tensor der Stufe
(m, n) ist.
29
Krummlinige Koordinaten
Nun kommen wir zu einer weiteren Stärke des Tensorkalküls. Wie wir bereits an einigen praktischen
Beispielen gesehen haben, lassen sich bestimmte physikalische Probleme erst dann lösen, wenn wir das
Koordinatensystem an das spezielle Problem anpassen. Dabei genügte es nicht immer, nur affine Koordinatensystems zu betrachten. Wir mussten auch krummlinige Koordinaten einführen, etwa Kugelkoordinaten,
um das allgemeine Zentralkraftproblem zu lösen. Tatsächlich lässt sich alles, was wie bisher über Tensoren
und Tensorfelder gesagt haben, auch mit Hilfe von krummlinigen Koordinatensystemen formulieren.
Zunächst definieren wir, was wir unter einem krummlinigen Koordinatensystem verstehen. Ist E ein
N -dimensionaler affiner Raum, so ist ein krummliniges Koordinatensystem eine Abbildung
RN → E, {r i } 7→ r {r i } ,
(10.38)
die einem Satz von N reellen Zahlen r i einen Punkt r ∈ E zuordnet. Das ist völlig analog zu (10.6), mit
den einzigen Unterschied, dass wir nun von der Koordinatenabbildung nicht mehr verlangen, dass die affin
ist. Wir verlangen nur noch, dass sie hinreichend oft differenzierbar ist. Außerdem muss sie, damit es sich
wirklich um ein Koordinatensystem handelt, zumindest lokal umkehrbar sein.
Lokal umkehrbar heißt, dass wir zumindest in der Umgebung eines Punktes allen anderen Punkten
eindeutig ihre Koordinaten zuordnen können. In der Regel ist ein krummliniges Koordinatensystem nicht
global invertierbar. Verwenden wir zum Beispiel Polarkoordinaten in der Ebene, so ist die Winkelkoordinate nur bis auf eine Vielfaches von 2π bestimmt. Dasselbe gilt für Kugelkoordinaten im dreidimensionalen
Raum. Aber zumindest in der Umgebung eines Punktes lassen sich eindeutig die Koordinaten aller anderen
Punkte angeben.
Im allgemeinen ist es auch so, dass von einem krummlinigen Koordinatensystem nur eine Teilmenge von
E erfasst wird. Bei einem Polarkoordinatensystem zum Beispiel nicht der Ursprung, und bei räumlichen
Kugel- oder Zylinderkoordinaten nicht die z-Achse. Wir sagen dann, dass das Koordinatensystem nur eine
Teilmenge des Raumes abdeckt, und können es natürlich nur dort verwenden. Das spielt aber im folgenden
keine Rolle, denn wir machen nur Aussagen über lokale Eigenschaften von Koordinaten und Feldern.
Notfalls müssen wir, um den Raum vollständig abzudecken, mehrere Koordinatensysteme verwenden.
Der Begriff der lokalen Invertierbarkeit lässt sich auch wie folgt fassen. Wir betrachten einen Punkt
r ∈ E, sowie eine kleine Umgebung dieses Punktes. Dort können wir die Koordinatenlinien als N parametrisierte Kurven auffassen, die sich im Punkt r schneiden. Eine Koordinatenlinie ist auch hier wieder
eine Kurve, die sich ergibt, wenn wir alle bis auf eine Koordinate festhalten und die verbleibende als
Kurvenparameter verwenden. Nur ist es jetzt eben keine Gerade mehr, sondern eine beliebige Kurve.
Wir können von diesen Kurven im Punkt r die Tangentenvektoren bilden. Sie zeigen an, in welche
Richtung die einzelnen Koordinatenlinien verlaufen. Die Tangentenvektoren bekommen wir, genau wie
vorher, indem wir von der Funktion (10.38) die partiellen Ableitungen nach den Koordinaten r i bilden. Es
sind also
∂r
(10.39)
ei (r) = i
∂r
die Tangentenvektoren der Koordinatenlinien im Punkt r. Die Schreibweise ist ein wenig verkürzt, aber es
sollte klar sein, wie die Ableitung zu verstehen ist. Zunächst ist der Punkt r eine Funktion der Koordinaten
{r i }. Diese Funktion leiten wir partiell ab, und erhalten so einen Satz von N Vektoren, die als Funktionen der Koordinaten {r i } gegeben sind. Setzen wir die Koordinaten des vorgegebenen Punktes r ein, so
erhalten wir die Vektoren ei (r).
Lokal invertierbar bedeutet nun, dass diese N Vektoren in jedem Punkt linear unabhängig sind, also
eine Basis es Tangentenraumes TE bilden. Anschaulich heißt das, dass wir von jedem Punkt r aus in
jede Richtung gehen können, ohne das Koordinatensystem zu verlassen. Die auf diese Weise durch das
Koordinatensystem in jedem Punkt r definierte Basis ei (r) heißt lokale Koordinatenbasis. Sie bildet die
Analogie zu der festen Basis ei , die zur Definition eines affinen Koordinatensystem gehört.
30
Ein krummliniges Koordinatensystem definiert an jedem Punkt eine lokale Koordinatenbasis.
Das können wir uns am besten wieder an einem einfachen Beispiel klar machen. Wir betrachten einen
zweidimensionalen affinen Raum, auf dem wir zunächst ein affines Koordinatensystem (x, y) einführen.
Ein Punkt r ∈ E ist dann eindeutig durch r(x, y) = o + x ex + y ey als Funktion von x und y gegeben,
und es gilt für die zugehörigen Basisvektoren
∂r
= ey .
∂y
∂r
= ex ,
∂x
(10.40)
Als krummliniges Koordinatensystem führen wir nun ein Polarkoordinatensystem ein, das wie folgt als
Abbildung definiert werden kann,
(r, ϕ)
7→
r(r, ϕ) = o + r cos ϕ ex + r sin ϕ ey .
(10.41)
Wenn wir diese Funktion nach r und ϕ ableiten, so finden wir für die Tangentenvektoren der Koordinatenlinien
∂r
er (r, ϕ) =
= cos ϕ ex + sin ϕ ey ,
∂r
∂r
eϕ (r, ϕ) =
= −r sin ϕ ex + r cos ϕ ey .
(10.42)
∂ϕ
In Abbildung 10.3(a) sind die Koordinatenlinien des affinen Koordinatensystems (x, y) gezeigt, in Abbildung 10.3(b) die des Polarkoordinatensystems (r, ϕ). An zwei ausgewählten Punkten r 1 und r2 sind die
entsprechenden Tangentenvektoren eingezeichnet. Wie man sieht, ergeben sich bei einem affinen Koordinatensystem in jedem Punkt die gleichen Vektoren (ex , ey ), während in einem krummlinigen Koordinatensystem die Vektoren (er , eϕ ) ortsabhängig sind.
Trotzdem bilden die beiden Vektoren (er , eϕ ) in jedem Punkt r, außer am Ursprung, der von den Polarkoordinaten nicht abgedeckt wird, eine Basis des Tangentenraumes TE. Wir können jeden Vektor v
als Linearkombination dieser Vektoren schreiben, und die Koeffizienten als die Komponenten v r und v ϕ
des Vektors bezeichnen. Wir müssen nur immer dazu sagen, an welcher Stelle r wir diese Entwicklung
vorgenommen haben. Zum Beispiel können wir ein Vektorfeld F darstellen, indem wir den Vektor F (r)
an der Stelle r in der dort definierten Basis entwickeln, also
F (r, ϕ) = F r (r, ϕ) er (r, ϕ) + F ϕ (r, ϕ) eϕ (r, ϕ).
(10.43)
Das ist die natürliche Art und Weise, ein Vektorfeld in einem krummlinigen Koordinatensystem darzustellen. Das einzig neue ist, dass jetzt nicht nur die Komponenten F i von den Koordinaten abhängen, sondern
auch die Basis ei , in der das Feld entwickelt ist. Das hat zur Folge, dass ein konstantes Vektorfeld nicht
unbedingt konstante Komponenten haben muss, und umgekehrt bedeuten konstante Komponenten nicht,
dass das Vektorfeld konstant ist.
Auch das kann man an einem einfachen Beispiel sehen. In Abbildung 10.3 ist jeweils zweimal derselbe Vektor v eingezeichnet, einmal am Punkt r1 und einmal am Punkt r2 . Definieren wir ein konstantes
Vektorfeld F = v, so sind die Komponenten F x und F y dieses Vektorfeldes natürlich konstant. Die Komponenten F r und F ϕ in Polarkoordinaten sind jedoch nicht konstant. Wie man in der Abbildung sieht, hat
der Vektor v an der Stelle r1 andere Komponenten bezüglich der dort definierten Basis als an der Stelle
r2 .
Umgekehrt sei ein Vektorfeld gegeben, das in Polarkoordinaten die konstanten Komponenten F r = 1
und F ϕ = 0 hat, also F = er . In affinen Koordinaten gilt dann F = cos ϕ ex + sin ϕ ey oder F =
31
(c)
(d)
ey
v
er
v
eϕ
r2
r2
ex
ey
r1
eϕ
v
v
r1
ex
er
(b)
(a)
Abbildung 10.3: In einem affinen Koordinatensystem (a) sind die Tangentenvektoren der Koordinatenlinien die Basisvektoren ei . In einem krummlinigen Koordinatensystem (b) bilden die Tangentenvektoren
der Koordinatenlinien in jedem Punkt r eine andere Basis e i (r).
x/r ex + y/r ey . Die Komponenten sind also F x = x/r und F y = y/r, wobei r als Funktion von x und
y aufzufassen ist. Das ist sicher kein konstantes Vektorfeld.
Wir können von der Darstellung eines Vektorfeldes in krummlinigen Koordinaten nicht unmittelbar auf
bestimmte Eigenschaften schließen. Insbesondere beim Ableiten von Vektorfeldern, worauf wir gleich
noch näher eingehen werden, spielt das eine gewisse Rolle. Solange wir keine Ableitungen bilden, ist das
Rechnen mit Tensorfeldern in krummlinigen Koordinatensystemen aber nicht komplizierter als in affinen
Koordinatensystemen.
Für die Transformation eines Tensorfeldes von einem affinen in ein krummliniges Koordinatensystem
gelten formal genau dieselben Regeln wie für die Transformation von einem affinen Koordinatensystem
zu einem anderen. Der entscheidende Trick ist derselbe wir vorher. Die Übergangsmatrizen lassen sich
als partielle Ableitungen der neuen Koordinaten nach den alten oder umgekehrt schreiben. Der einzige
Unterschied ist, dass diese jetzt ortsabhängig sind.
Nehmen wir zum Beispiel die Definition (10.39) der Basisvektoren e i (r) in einem krummlinigen Koordinatensystem, und stellen wir die krummlinigen Koordinaten r i als Funktion von affinen Koordinaten
r a dar, so finden wir
∂r
∂r ∂r a
a
ei (r) = i = a
(10.44)
i = ea Λ i (r).
∂r ∂r
∂r
Die krummlinigen Basisvektoren ei (r) an der Stelle r ergeben sich aus den affinen Basisvektoren ei durch
eine Übergangsmatrix Λai (r), die jetzt vom Ort r abhängt, an dem wir uns befinden. Sie ist aber immer
noch durch dieselbe partielle Ableitung gegeben, nur dass diese jetzt nicht mehr konstant ist.
Wir müssen also gar nicht den Umweg über die Koordinatenabbildung (10.38) machen, sondern können
die Transformation der Basis direkt aus dem Zusammenhang zwischen den beiden Koordinatensystem
ablesen. Im obigen Beispiel ist
x = r cos ϕ, y = r sin ϕ,
(10.45)
32
und daher
∂x
ex +
∂r
∂x
eϕ =
ex +
∂ϕ
Das ist natürlich dasselbe wie (10.42).
er =
∂y
ey = cos ϕ ex + sin ϕ ey ,
∂r
∂y
ey = −r sin ϕ ex + r cos ϕ ey .
∂ϕ
(10.46)
Aufgabe 10.10 Man zeige, dass die Beziehung (10.44) sogar dann noch gilt, wenn beide beteiligten Koordinatensystem krummlinig sind, wobei dann natürlich beide Basen ortsabhängig sind.
Insbesondere können wir das Transformationsgesetz (10.30) für beliebige Vektorfelder unmittelbar übernehmen, das heißt für den Übergang von einem beliebigen Koordinatensystem zu einem beliebigen anderen gilt für einen Tensor der Stufe (m, n)
F a ··· bc ··· d (r) =
∂r a
∂r b i ··· j
∂r k
∂r l
·
·
·
F
(r)
,
·
·
·
k ··· l
∂r c
∂r i
∂r j
∂r d
(10.47)
wobei links m und rechts n Übergangsmatrizen stehen, die jetzt alle vom Ort abhängen.
Als Beispiel wollen wir die Metrik in Polarkoordinaten ausdrücken. Wenn (x, y) kartesische Koordinaten sind, dann ist gxx = gyy = 1 und gxy = gyx = 0. Explizites Ausschreiben der Summen in (10.47)
liefert dann
grr = gxx
∂x ∂y
∂y ∂x
∂y ∂y
∂x ∂x
+ gxy
+ gyx
+ gyy
= cos2 ϕ + sin2 ϕ = 1.
∂r ∂r
∂r ∂r
∂r ∂r
∂r ∂r
(10.48)
Dieselbe Rechnung für die anderen drei Komponenten ergibt
grr = 1,
grϕ = gϕr = 0,
gϕϕ = r 2 .
(10.49)
Ein Vektor v, der an der Stelle (r, ϕ) durch seine Komponenten v r und v ϕ dargestellt ist, hat also den
Betrag |v|2 = (v r )2 + r 2 (v ϕ )2 . Und ein Vektorfeld, das konstante Komponenten F ϕ = q und F r = 0 hat,
steigt, wenn man den Betrag des Feldes betrachtet, wie q r mit dem Radius an.
Aufgabe 10.11 Wie sieht die inverse Metrik g ij in Polarkoordinaten aus, und welches Verhalten hat der
Betrag eines Vektorfeldes mit zunehmendem r, wenn dessen Komponenten mit unteren Indizes F r und Fϕ
konstant sind?
Die Koordinatenbasis, die an der Stelle (r, ϕ) durch die Polarkoordinaten definiert ist, ist offenbar keine
Orthonormalbasis. Auch das ist in Abbildung 10.3 zu sehen. Die Vektoren e r und eϕ stehen zwar überall
senkrecht zueinander. Der Vektor eϕ , der tangential zu den Kreisen um den Ursprung zeigt, wird aber nach
außen hin immer länger, während der Vektor er , der radial nach außen zeigt, immer ein Einheitsvektor ist.
Alle diese Eigenschaften der Basisvektoren lesen wir auch aus (10.49) ab, denn die Komponenten der
Metrik sind, wie wir wissen, die Skalarprodukte der Basisvektoren, g ij = ei · ej .
Als zweites Beispiel berechnen wir noch den antisymmetrischen Einheitstensor in Polarkoordinaten. Da
wir uns in einem zweidimensionalen Raum befinden, hat er nur zwei Indizes und ist durch ω xy = 1 oder
ω xy = 1 eindeutig festgelegt. Die Basis (ex , ey ) soll also positiv orientiert sein. Um ihn zu transformieren,
müssen wir nur eine Komponente berechnen, zum Beispiel
ωrϕ = ωxx
∂x ∂x
∂x ∂y
∂y ∂x
∂y ∂y
+ ωxy
+ ωyx
+ ωyy
= r cos2 ϕ + r sin2 ϕ = r.
∂r ∂ϕ
∂r ∂ϕ
∂r ∂ϕ
∂r ∂ϕ
(10.50)
Es gilt also
ωrr = 0,
ωrϕ = r,
ωϕr = −r,
33
ωϕϕ = 0.
(10.51)
Wie man leicht sieht, stimmt auch hier die Beziehung (9.86) zwischen dem antisymmetrischen Einheitstensor ωij , der Determinante g der Metrik, und dem Levi-Civita-Symbol εij , nur dass dieses jetzt auch nur
√
zwei Indizes trägt. Aus (10.49) entnimmt man, dass g = det(gij ) = r 2 ist, und somit g = r. Setzen wir
√
dann noch εrϕ = 1, so bekommen wir ωij = g εij = r εij , was mit (10.51) übereinstimmt.
Da sich dabei ein positives Vorzeichen ergibt, ist das Koordinatensystem (r, ϕ) offenbar ebenfalls positiv orientiert. Auch das sehen wir in der Abbildung 10.3. Die Basen (e r , eϕ ) haben überall die gleiche
Orientierung wie (ex , ey ).
Aufgabe 10.12 Man bestimme die Komponenten der Metrik und des antisymmetrischen Einheitstensors
in Zylinderkoordinaten (r, ϕ, u), definiert durch
x = r cos ϕ,
y = r sin ϕ,
z = u,
(10.52)
wobei (x, y, z) ein kartesischen Koordinatensystem ist. Die ungew öhnliche Bezeichnung u für die dritte
Koordinaten wurde hier nur gewählt, um sie eindeutig einem der beiden Koordinatensysteme zuzuordnen.
Man erkläre anhand des allgemeinen Transformationsgesetzes für Tensoren (10.47), warum es erlaubt ist,
Koordinaten, die bei der Transformation nicht beteiligt sind, in beiden Koordinatensystemen denselben
Namen zu geben.
Aufgabe 10.13 Kugelkoordinaten (r, ϑ, ϕ) sind durch die Beziehungen
x = r sin ϑ cos ϕ,
y = r sin ϑ sin ϕ,
z = r cos ϑ
(10.53)
zu einem kartesischen Koordinatensystem (x, y, z) definiert. Man zeige, dass die Metrik in Kugelkoordinaten die Darstellung
grr = 1,
gϑϑ = r 2 ,
gϕϕ = r 2 sin2 ϑ,
(10.54)
und der antisymmetrische Einheitstensor die Darstellung
ωrϑϕ = ωϑϕr = ωϕrϑ = −ωrϕϑ = −ωϑrϕ = −ωϕϑr = r 2 sin ϑ
(10.55)
hat. Alle nicht angegebenen Komponenten sind Null.
Aufgabe 10.14 Wir betrachten ein Vektorfeld auf dem dreidimensionalen Euklidischen Raum, das in kartesischen Koordinaten durch
q
F = f (r) (y ex − x ey ), mit r = x2 + y 2 ,
(10.56)
dargestellt wird. Wie sieht dieses Vektorfeld aus? Wie verhält sich sein Betrag als Funktion des Abstandes
von der z-Achse? Man bestimme die Komponenten des Vektorfeldes in Zylinderkoordinaten, und zwar
sowohl die Komponenten (F r , F ϕ , F z ) mit oberen Indizes, also auch die Komponenten (Fr , Fϕ , Fz ) mit
unteren Indizes. Was fällt auf, wenn man das Verhalten dieser Komponenten als Funktion von r betrachtet?
Warum ist das so?
Aufgabe 10.15 Man führe dieselben Überlegungen wie in Aufgabe 10.14 für das Vektorfeld
q
F = f (r) (x ex + y ey ), mit r = x2 + y 2 ,
(10.57)
durch. Man diskutiere auch hier das Verhalten der Komponenten (F r , F ϕ , F z ) und (Fr , Fϕ , Fz ) als Funktion von r. Warum ergibt sich etwas ganz anderes als in Aufgabe 10.14?
34
Aufgabe 10.16 Man stelle die dualen Basisvektoren er (r, ϕ) und eϕ (r, ϕ) für ebene Polarkoordinaten als
Funktion der dualen Basisvektoren ex und ey dar.
Aufgabe 10.17 Im dreidimensionalen Euklidischen Raum soll ein Volumenintegral über ein skalares Feld
φ einmal in kartesischen Koordinaten (x, y, z) und einmal in krummlinigen Koordinaten (u, v, w) ausgeführt werden. Es sei g die Determinante der Metrik im krummlinigen Koordinatensystem, die im allgemeinen von den Koordinaten, also vom Ort abhängt. Man zeige, dass das Integral durch
Z
Z
p
dx dy dz φ(x, y, z) = du dv dw g(u, v, w) φ(u, w, v)
(10.58)
gegeben ist. Die Wurzel aus der Determinante der Metrik definiert also in einem beliebigen krummlinigen Koordinatensystem das Volumenelement. Man vergleiche dies mit den bekannten Ausdr ücken für das
Volumenelement in Kugel- und Zylinderkoordinaten.
Aufgabe 10.18 Krummlinige Koordinaten im dreidimensionalen Euklidischen Raum m üssen nicht die
physikalische Dimension einer Länge haben. Sie können sogar verschiedene Einheiten tragen. In Kugelkoordinaten gilt zum Beispiel r = Länge, aber ϑ = ϕ = Winkel, das heißt zwei der drei
Koordinaten sind dimensionslos. Anderseits bilden die Vektoren (e r , eϑ , eϕ ) keine Orthonormalbasis. Es
handelt sich also nicht um Einheitsvektoren, und folglich müssen sie auch nicht dimensionslos sein. Welche physikalische Dimension haben sie? Welche Beziehung besteht allgemein zwischen den physikalischen
Dimensionen von krummlinigen Koordinaten r i und denen der zugehörigen Basisvektoren ei ? Welche
physikalischen Dimensionen haben die Komponenten gij der Metrik in Kugelkoordinaten, bzw. in einem
allgemeinen krummlinigen Koordinatensystem?
Die kovariante Ableitung
Wir können nun beliebige Tensorfelder auch in krummlinigen Koordinatensystemen darstellen. Grundsätzlich gilt dabei stets, dass man ein Tensorfeld, wenn man es an einem Punkt r auswertet, auch in der lokalen
Basis in diesem Punkt in seine Komponenten zerlegt. Folglich können wir Tensorfelder auch in krummlinigen Koordinatensystemen punktweise addieren, multiplizieren und kontrahieren.
Bei Ableiten gibt es aber ein Problem. Denn dabei vergleichen wir ja die Werte eines Tensors an zwei
verschiedenen Punkten und bilden einen Grenzwert. Wir zeigen zunächst, dass die beiden einfachsten
Ableitungen, nämlich das Bilden des Tangentenvektors einer Kurve und des Gradienten eines skalaren
Feldes, trotzdem auch in krummlinigen Koordinatensystemen in der gleichen Art und Weise funktionieren.
Das ist im Grunde ganz einfach, denn wir man leicht sieht, gelten die Transformationsregeln (10.22)
auch dann noch, wenn die beiden Koordinatensysteme krummlinig sind. Es sind einfache Anwendungen
der Kettenregel, die natürlich auch dann gelten, wenn die Übergangsfunktionen ∂r i /∂r a bzw. ∂r a /∂r i
nicht konstant sind. Das Bilden des Tangentenvektors einer Kurve oder des Gradienten eines skalaren
Feldes macht in krummlinigen Koordinatensystemen keine Probleme.
Bei einem Vektorfeld ist es schon schwieriger. So haben wir bereits gesehen, dass konstante Komponenten eines Vektorfeldes nicht bedeuten, dass das Feld als solches konstant ist, und umgekehrt hat ein
konstantes Vektorfeld in krummlinigen Koordinaten keine konstanten Komponenten. Würden wir einfach
die Ableitung der Komponenten nach den Koordinaten bilden, würden daher ein völlig falsches Bild davon
bekommen, wie sich das Vektorfeld von Punkt zu Punkt verändert.
Um die “richtige” Ableitung eines Vektorfeldes in krummlinigen Koordinaten zu bilden, schauen wir
uns die explizite Darstellung eines Vektorfeldes an, nämlich als Linearkombination der lokalen Basisvektoren
F (r) = F i (r) ei (r).
(10.59)
35
Was passiert nun, wenn wir ein dieses Feld ableiten? Offenbar müssen wir dabei beachten, dass nicht nur
die Komponenten F i von r abhängen, sondern auch die Basis ei , in der das Feld dargestellt ist. Bilden wir
zum Beispiel die Ableitung nach r k , so finden wir
∂F
∂
i
= ∂ k F i ei + F i ∂ k ei .
(10.60)
F
e
=
i
k
k
∂r
∂r
Nun möchten wir diesen Vektor gerne wieder in der lokalen Basis e j am Ort r darstellen. Dazu müssen
wir die Ableitungen der Basisvektoren wieder nach diesen entwickeln. Das heißt, wie müssen den Vektor
∂k ei als Linearkombination der Basisvektoren ej darstellen,
∂k ei = Γ jik ej .
(10.61)
Die Koeffizienten dieser Entwicklung bilden ein Schema von (dim E) 3 Zahlen, das man Christoffel-Symbol
nennt. Es ist gewissermaßen ein Maß dafür, wie krummlinig ein Koordinatensystem ist. Für ein affines
Koordinatensystem sind alle Einträge gleich Null, denn dort sind die Basisvektoren konstant.
Aufgabe 10.19 Tatsächlich ist das Christoffel-Symbol eines Koordinatensystems genau dann gleich Null,
wenn es sich um ein affinen Koordinatensystem handelt. Warum ist das so?
Wenn wir (10.61) in (10.60) einsetzen und ein paar Indizes umbenennen, bekommen wir
∂F
i
i
j
=
∂
F
+
Γ
F
ei .
(10.62)
k
jk
∂r k
Wir haben also die Ableitung eines Vektors wieder als Linearkombination der Basisvektoren geschrieben.
Die Komponenten dieses Vektors, also den Ausdruck in der Klammer, bezeichnen wir mit
∇k F i = ∂k F i + Γ ijk F j ,
(10.63)
und nennen ihn die kovariante Ableitung von F k nach r i .
Wir wollen zeigen, dass es sich dabei um die Komponenten des Tensors ∇F bezüglich des krummlinigen Koordinatensystems handelt. In einem affinen Koordinatensystem ist dieser Tensor durch die Komponenten ∂c F a gegeben, also durch die partiellen Ableitungen der Komponenten F a nach den Koordinaten
r a . Wir können dafür auch ∇c F a schreiben, denn in einem affinen Koordinatensystem verschwindet das
Christoffel-Symbol.
Wir müssen also zeigen, dass ∇c F a und ∇k F j zwei Darstellungen desselben Tensors der Stufe (1, 1)
sind. Dazu schreiben wir das Transformationsgesetz auf, wobei wir eine Übergangsmatrix auf die linke
und eine auf die rechte Seite schreiben. Zu zeigen ist also
∂r c
∂r c ∂F a
∂r a ∂F i ∂r a i
∂r a
i
j
a
∇
F
=
Γ
F
=
.
(10.64)
∇
F
⇔
+
k
jk
c
∂r i
∂r i ∂r k
∂r i
∂r k
∂r k ∂r c
Um die linke Seite umzuformen, setzen wir die Definition (10.39) der Basisvektoren in die Definition
(10.61) des Christoffelsymbols ein. Das ergibt
a
∂r
∂2r
∂ 2 ra
i ∂r
= j k ⇒ Γ jk i = j k .
(10.65)
∂r i
∂r
∂r ∂r
∂r ∂r
Die zweite Gleichung folgt aus der ersten, indem wir den Punkt r im affinen Koordinatensystem durch
r = o + r a ea ausdrücken und benutzen, dass die Basisvektoren ea konstant sind. Wenn wir das dann in
die linke Seite von (10.64) einsetzen, finden wir
∂ 2 ra
∂ ∂r a j ∂F a
∂r a ∂F i ∂r a i
∂r a ∂F j
j
j
+
+
F
=
(10.66)
Γ
F
=
F =
jk
∂r i ∂r k
∂r i
∂r j ∂r k
∂r j ∂r k
∂r k ∂r j
∂r k
Das ist aber nach der Kettenregel gleich der rechten Seite von (10.64). Wir haben also gezeigt, dass der
Ausdruck (10.63), wenn wir ihn in ein affines Koordinatensystem transformieren, dort die Ableitung ∇F
des Vektorfeldes F repräsentiert.
Γ ijk
36
Der Ableitung eines Tensorfeldes wird in krummlinigen Koordinaten durch die kovariante
Ableitung seiner Komponenten dargestellt.
Welche praktische Bedeutung hat das nun? Wir veranschaulichen uns dies wieder am Beispiel der Polarkoordinaten. Wenn wir die Basisvektoren er und eϕ nach den Koordinaten ableiten und das Ergebnis wieder
als Linearkombination dieser Vektoren darstellen, dann finden wir nach einer kurzen Rechnung
∂r er = 0,
∂ ϕ er =
1
eϕ ,
r
∂ r eϕ =
1
eϕ ,
r
∂ϕ eϕ = −r er .
(10.67)
Daraus lesen wir ab, dass nur die folgenden Komponenten des Christoffel-Symbols nicht verschwinden,
Γ rϕϕ = −r,
1
Γ ϕrϕ = Γ ϕϕr = .
r
(10.68)
Betrachten wir nun zum Beispiel ein Vektorfeld, das radial nach innen oder außen zeigt, also
F = f (r) er ,
oder F r = f (r),
F ϕ = 0.
(10.69)
Wir wollen die Divergenz dieses Vektorfeldes berechnen. Die naive Rechnung divF = ∂ r F r + ∂ϕ F ϕ =
f 0 (r) führt zum falschen Ergebnis. Wenden wir jedoch die Formel (10.63) an und bilden die kovariante
Ableitung, dann ergibt sich
∇i F i = ∂i F i + Γ iji F j = ∂r F r + ∂ϕ F ϕ +
1 r
1
F = f 0 (r) + f (r).
r
r
(10.70)
Hier haben wir verwendet, dass
1
Γ iri = Γ rrr + Γ ϕrϕ = ,
r
Γ iϕi = Γ rϕr + Γ ϕϕϕ = 0.
(10.71)
Aufgabe 10.20 Man rechne das Vektorfeld (10.69) in affine Koordinaten (x, y) im und zeige, dass (10.70)
tatsächlich das richtige Ergebnis ist, das sich auch aus ∂a F a = ∂x F x + ∂y F y ergibt.
Wir benötigen die kovariante Ableitung und damit das Christoffel-Symbol also dazu, um in krummlinigen
Koordinaten Ableitungen von Vektorfeldern zu berechnen. Der Vorteil ist dabei, dass wir das ChristoffelSymbol für jedes Koordinatensystem nur einmal berechnen müssen, also eine Art Formelsammlung anlegen können, um es immer dann anwenden zu können, wenn wir mit diesen Koordinaten arbeiten.
Natürlich lässt sich die kovariante Ableitungen auf beliebige Tensorfelder anwenden. Wie das geht,
bekommen wir mit folgendem Trick heraus. Wir betrachten ein Vektorfeld F und ein duales Vektorfeld
G, sowie das skalare Feld φ = G · F . In einem affinen Koordinatensystem mit Koordinaten r a gilt dann
φ = Ga F a
⇒
∂b φ = ∂b (Ga F a ) = ∂b Ga F a + Ga ∂b F a .
(10.72)
Das ist eine Beziehung zwischen Tensoren, folglich in jedem Koordinatensystem gilt, auch in einem
krummlinigen. Dort müssen wir allerdings die Komponenten der Tensoren ∇F und ∇G, die auf der
rechten Seite stehen, durch die kovarianten Ableitungen darstellen. Das skalare Feld φ dagegen können
wir einfach partiell nach den Koordinaten r i ableiten. Es gilt also im krummlinigen Koordinatensystem
∂k φ = ∂k (Gi F i ) = ∂k Gi F i + Gi ∂k F i = ∇k Gi F i + Gi ∇k F i .
(10.73)
Der dritte Ausdruck ergibt sich aus der Produktregel für partielle Ableitungen aus dem zweiten. Der letzte
Ausdruck ergibt aus der rechten Seite von (10.72), wenn wir die beiden Summanden als Tensoren transformieren. Wenn wir nun hier die Definition (10.63) der kovarianten Ableitung eines Vektorfeldes einsetzen,
und anschließend die Indizes umbenennen, bekommen wir
∂k Gi F i = ∇k Gi F i + Gi Γ ijk F j = ∇k Gi F i + Gi Γ jik F i .
37
(10.74)
Da dies für jedes Vektorfeld F gelten muss, ergibt sich
∇k Gi = ∂k Gi − Gj Γ jik .
(10.75)
Das ist der allgemeine Ausdruck für die kovariante Ableitung eines Tensorfeldes der Stufe (0, 1). Wir
können also die kovariante Ableitung eines dualen Vektorfeldes mit dem gleichen Christoffel-Symbol
bilden, allerdings mit einer leicht veränderten Indexstellung. Mit einem ganz ähnlichen Trick lässt sich
die kovariante Ableitung eines beliebigen Tensorfeldes bestimmen. Das werden wir aber vorerst nicht
benötigen.
Aufgabe 10.21 Man zeige, dass das Christoffel-Symbol in seinen beiden unteren Indizes symmetrisch ist,
Γ kij = Γ kji .
(10.76)
Aufgabe 10.22 Warum ist das Christoffel-Symbol nicht die Darstellung eines Tensors?
Aufgabe 10.23 Man zeige, dass die nicht verschwindenden Eintr äge des Christoffel-Symbol auf einem
dreidimensionalen affinen Raum in Zylinderkoordinaten (r, ϕ, z) genau durch (10.68) gegeben sind, also
mit denen für ein ebenes Polarkoordinatensystem identisch sind.
Aufgabe 10.24 Ein Vektorfeld in einem zweidimensionalen affinen Raum sei in Polarkoordinaten durch
F = F r er + F ϕ eϕ dargestellt. Man zeige, dass dieses Feld genau dann konstant ist, wenn die Komponenten die folgenden Differenzialgleichungen erfüllen,
∂r F r = 0,
∂r (r F ϕ ) = 0,
∂ϕ F r = r F ϕ ,
∂ϕ (r F ϕ ) = −F r .
(10.77)
Aufgabe 10.25 Man zeige, dass das Christoffel-Symbol in Kugelkoordinaten (r, ϑ, ϕ) die folgenden nicht
verschwindenden Einträge hat,
Γ rϑϑ = −r
Γ rϕϕ = −r sin2 ϑ
Γ ϑrϑ = Γ ϑϑr = Γ ϕrϕ = Γ ϕϕr =
1
r
Γ ϑϕϕ = − sin ϑ cos ϑ
Γ ϕϑϕ = Γ ϕϕϑ = cot ϑ.
(10.78)
Aufgabe 10.26 Es sei r(t) eine parametrisierte Kurve in E, zum Beispiel die Bahn eines Teilchens im physikalischen Raum. Stellt man diese in einem krummlinigen Koordinatensystem durch die Funktionen r i (t)
dar, so sind die Ableitungen v i (t) = ṙ i (t) die Komponenten der Geschwindigkeit v(t), dargestellt in der
lokalen Basis an dem Ort, an dem sich das Teilchen gerade befindet. Man zeige, dass die Beschleunigung
a(t) wie folgt dargestellt wird,
ai (t) = r̈ i (t) + Γ ikl (r(t)) ṙ k (t) ṙ l (t),
(10.79)
also durch eine kovariante Ableitung, wobei das Christoffel-Symbol wieder an dem Ort auszuwerten ist,
an dem sich das Teilchen gerade befindet. Wie lauten folglich die Bewegungsgleichungen f ür ein kräftefreies Teilchen in Kugelkoordinaten (r(t), ϑ(t), ϕ(t))? Man betrachte speziell ein Teilchen, das sich in der
Äquatorebene bewegt. Es sei also ϑ = π/2. Man zeige, dass sich in diesem Fall unmittelbar die Drehimpulserhaltung ` = m r 2 ϕ̇ = konst ergibt, sowie die radiale Bewegungsgleichung
m r̈ = −∂r Ve (r),
mit Ve (r) =
`
.
2 m r2
(10.80)
Man vergleiche die Ausdrücke für Geschwindigkeit und Beschleunigung mit denen aus Kapitel 5, also
(5.32) und (5.35). Warum stimmen die Komponenten nicht überein? Welcher wesentliche Unterschied besteht zwischen den dort eingeführten Basisvektoren (~er ,~eϑ ,~eϕ ) und den hier verwendeten Basisvektoren
(er , eϑ , eϕ )?
38
Aufgabe 10.27 Ein Tensor der Stufe (0, 2) kann durch Tensormultiplikation von zwei dualen Vektoren gebildet werden, Bij = Xi Yj . Dasselbe gilt für ein entsprechendes Tensorfeld. Man benutze die Darstellung
(10.75) für die kovariante Ableitung eines dualen Vektorfeldes, um zu zeigen, dass die kovariante Ableitung
eines Tensorfeldes der Stufe (0, 2) wie folgt gebildet wird,
∇k Bij = ∂k Bij − Γ lik Blj − Γ ljk Bil .
(10.81)
Wie wird die kovariante Ableitung eines Tensorfeldes der Stufe (m, n) gebildet?
Aufgabe 10.28 Es sei E ein metrischer affiner Raum und {r i } ein krummliniges Koordinatensystem. Dann
sind die Komponenten der Metrik gij im allgemeinen ortsabhängig, das heißt die partiellen Ableitungen
∂k gij sind nicht Null. Warum ist trotzdem ∇k gij = 0?
Aufgabe 10.29 Man beweise, dass ein Koordinatensystem genau dann affin ist, wenn die Komponenten
gij der Metrik konstant, also nicht ortsabhängig sind.
Gradient, Divergenz, Rotation
Der Begriff der Divergenz eines Vektorfeldes ist gerade schon gefallen, und wir haben auch schon den
Gradient eines skalaren Feldes definiert. Dies waren zwei der drei Ableitungsoperationen, die wir bereits
früher für Felder auf dem Euklidischen Raum eingeführt haben. Wie wollen nun zeigen, wie sich diese
im Tensorkalkül formulieren lassen, und insbesondere deren Darstellung in krummlinigen Koordinaten
diskutieren.
Wir betrachten dazu speziell den dreidimensionalen Euklidischen Raum, lassen aber beliebige krummlinige Koordinatensysteme zu. Die Metrik g wird dann durch einen ortsabhängige Matrix g ij und ihre
inverse Matrix g ij dargestellt, und auch der antisymmetrische Einheitstensor ω hat ortsabhängige Komponenten ωijk bzw. ω ijk . Diese zwei Tensoren stehen uns zur Verfügung, um daraus die bekannten Ableitungsoperatoren zu konstruieren.
Beginnen wir mit dem Gradient. Wenn φ ein skalares Feld ist, dann sind die partiellen Ableitungen nach
der Koordinaten ∂i φ, wie wir schon gezeigt haben, die Komponenten eines dualen Vektorfeldes. In einem
metrischen Raum können wir dies mit einem Vektorfeld identifizieren, indem wir den Index nach oben
ziehen, also
grad φ = ∂i φ ei = g ij ∂j φ ei = g ij ∇j φ ei .
(10.82)
Wir können hier auch die kovariante Ableitung schreiben, denn diese ist, wenn sie auf ein skalares Feld
wirkt, mit der gewöhnlichen partiellen Ableitung identisch. Das einzige, was wir beim bilden des Gradienten in einem krummlinigen Koordinatensystem beachten müssen, ist die Indexstellung. Wenn wir den
Gradient explizit als Vektorfeld, also mit dem Index oben darstellen wollen, müssen wir die inverse Metrik
dazu verwenden.
Haben wir zum Beispiel ein Feld φ in Kugelkoordinaten gegeben, so gilt für den Gradient
grad φ = ∂r φ er +
1
1
∂ ϕ φ eϕ .
∂ ϑ φ eϑ + 2
2
r
r sin2 ϑ
(10.83)
Die inverse Metrik haben wir dabei aus (10.54) entnommen. Da es sich um eine diagonale Matrix handelt,
müssen wir nur die einzelnen Einträge invertieren.
Die Divergenz eines Vektorfeldes F = F i ei haben wir gerade schon gebildet. Für sie gilt allgemein
div F = ∇i F i = ∂i F i + Γ iji F j .
(10.84)
Hier müssen wir die kovariante Ableitung verwenden, denn nur dann ist das Ergebnis unabhängig vom verwendeten Koordinatensystem. Wir hatten das an einem zweidimensionalen Beispiel schon gesehen. Nur,
39
wenn wir ein affines, also geradliniges Koordinatensystem verwenden, fällt der Term mit dem ChristoffelSymbol weg.
Auch hier betrachten wir speziell ein in Kugelkoordinaten durch die Komponenten (F r , F ϑ , F ϕ ) dargestelltes Vektorfeld. Die auftretenden Christoffel-Symbole, bei denen noch über den Index i zu summieren
ist, entnehmen wir aus (10.78). Wenn wir die Summen ausführen, finden wir
2
Γ iri = ,
r
Γ iϑi = cot ϑ,
Γ iϕi = 0.
(10.85)
Folglich ergibt sich für die Divergenz eines Vektorfeldes in Kugelkoordinaten explizit
div F = ∂r F r + ∂ϑ F ϑ + ∂ϕ F ϕ +
2 r
F + cot ϑ F ϑ .
r
(10.86)
Aufgabe 10.30 Ein kugelsymmetrisches Vektorfeld zeige radial nach außen, also F = f (r) e r . Man bestimme f (r) so, dass div F = 0 ist. Mit welcher Potenz von r fällt das Feld nach außen ab?
Um die Rotation zu bilden, benötigen wir den antisymmetrischen Einheitstensor. Für ein Vektorfeld F =
F i ei setzen wir
rot F = ω ijk ∇i Fj ek = ω ijk ∂i Fj ek .
(10.87)
Hier müssten wir im Prinzip auch die kovariante Ableitung verwenden, denn sie wirkt auf ein Vektorfeld,
aber in diesem Fall fällt das Christoffel-Symbol weg, weil es in seinen unteren beiden Indizes symmetrisch
ist. Bei der Kontraktion mit dem antisymmetrischen Einheitstensor ergibt sich deshalb Null.
Das Bilden der Rotation ist also recht einfach, denn hier genügt auch in krummlinigen Koordinaten die
normale partielle Ableitung. Allerdings tritt der antisymmetrische Einheitstensor auf, in dessen Darstellung die Determinante der Metrik eingeht, und wir müssen das Vektorfeld zuerst durch seine Komponenten
mit unteren Indizes darstellen.
Aufgabe 10.31 Ein Vektorfeld sei in Zylinderkoordinaten durch F = F r er + F ϕ eϕ + F z ez gegeben.
Man benutze das Ergebnis aus Aufgabe 10.12, um zu zeigen, dass
rot F = r ∂r F ϕ −
1
1
1
∂ ϕ F r + 2 F ϕ ez + ∂ ϕ F z − r ∂ z F ϕ er +
∂ z F r − ∂ r F z eϕ
r
r
r
(10.88)
ist. Man betrachte speziell ein Vektorfeld B = f (r) eϕ . Für welche Funktionen f (r) gilt rot B = 0? Mit
welcher Potenz von r fällt der Betrag dieses Feld nach außen ab?
Zum Abschluss betrachten wir noch den Laplace-Operator, der eine spezielle zweite Ableitung eines
Feldes definiert. Wenn φ ein skalares Feld ist, dann können wir zuerst den Gradient ∇i φ = ∂i φ bilden. Das
ist ein duales Vektorfeld, das wir wieder ableiten können. Allerdings müssen wir dabei beachten, dass die
zweite Ableitung auf einen dualen Vektor wirkt, so dass wir in krummlinigen Koordinaten die kovariante
Ableitung gemäß (10.75) verwenden müssen. Es ist also
∇i ∇j φ = ∂i ∂j φ − Γ kij ∂k φ.
(10.89)
Hieraus ergibt sich übrigens eine Begründung dafür, warum das Christoffel-Symbol in seinen beiden unteren Indizes symmetrisch sein muss. Es ist nämlich ∇i ∇j φ = ∇j ∇i φ, denn in einem affinen Koordinatensystem handelt es sich dabei im die zweite partielle Ableitung einer Funktion, und die ist natürlich
symmetrisch. Also muss das auch in jedem krummlinigen Koordinatensystem gelten, und das ist offenbar
genau dann der Fall, wenn Γ kij = Γ kji ist.
Nun ist (10.89) ein Tensor zweiter Stufe. In einem metrischen Raum können wir ihn kontrahieren, wenn
wir einen der Indizes zuerst mit der Metrik nach oben ziehen. Auf diese Wiese ist der Laplace-Operator
definiert,
(10.90)
4φ = g ij ∇i ∇j φ = g ij ∂i ∂j φ − g ij Γ kij ∂k φ.
40
In kartesischen Koordinaten entspricht das der üblichen Definition 4 = ∂ i ∂i . Wir können den Operator jetzt aber auch sehr leicht zum Beispiel in Kugelkoordinaten berechnen. Wir benutzen wieder die
Christoffel-Symbole (10.78), sowie die Metrik (10.54) bzw. die daraus abgeleitete inverse Metrik. Eine
kurze Rechnung ergibt
2
g ij Γ rij = − ,
r
g ij Γ ϑij = −
cot ϑ
,
r2
g ij Γ ϕij = 0.
(10.91)
Eingesetzt in (10.90) ergibt das
4φ = ∂r ∂r φ +
2
cot ϑ
1
1
∂ϕ ∂ϕ φ.
∂r φ + 2 ∂ϑ ∂ϑ φ + 2 ∂ϑ φ + 2
r
r
r
r sin2 ϑ
(10.92)
Aufgabe 10.32 Man bestätige die Ausdrücke (10.91) für die im Laplace-Operator vorkommenden Kombinationen der Christoffel-Symbole und zeige, dass sich der Operator (10.92) auch wie folgt schreiben
lässt,
1 ∂ 2 ∂φ ∂ ∂2φ
1
∂φ 1
4φ = 2
.
(10.93)
r
+ 2
sin ϑ
+ 2
∂r
∂ϑ
r ∂r
r sin ϑ ∂ϑ
r sin2 ϑ ∂ϕ2
Aufgabe 10.33 Um den Laplace-Operator in einem krummlinigen Koordinatensystem darzustellen, gibt
es eine alternative, in den meisten Fällen sehr viel einfachere Formel, die ohne Christoffel-Symbole auskommen. Man zeige, dass in jedem Koordinatensystem
1
√
4φ = √ ∂i g g ij ∂j φ ,
g
mit g = det(gij ),
(10.94)
gilt, und dass sich daraus der Ausdruck (10.93) für den Laplace-Operator in Kugelkoordinaten ergibt.
Aufgabe 10.34 Gibt es für die Vektorfelder aus Aufgabe 10.14 und Aufgabe 10.15 jeweils ein skalares
Feld φ, so dass F = ∇φ ist?
41
11 Lagrangesche Mechanik
In diesem Kapitel werden wir den ersten Schritt zu einer allgemeinen Formulierung aller heute bekannten
fundamentalen physikalischen Theorien machen. Allerdings ist dieser erste Schritt sehr bescheiden. Wir
werden im Prinzip nichts anderes tun als die Newtonschen Bewegungsgleichungen in einer mathematisch
etwas anspruchsvolleren, “geometrischen” Form aufzuschreiben.
Diese neue Formulierung der Newtonschen Mechanik wurde im 18. Jahrhundert entwickelt und geht
im wesentlichen auf d’Alembert, Lagrange und Euler zurück. Sie ist begrifflich sehr viel abstrakter als
die Newtonsche Formulierung, bietet aber eine Reihe von praktischen und konzeptionellen Vorteilen. Ein
wichtiger, ganz pragmatischer Vorteil ist, dass sich typische mechanische Systeme, wie sie in technischen
Anwendungen auftreten, sehr viel effizienter berechnen lassen als mit den Newtonschen Mitteln.
Eine andere, für die theoretische Physik besonders wichtige Eigenschaft der neuen Formulierung ist,
dass sich mit ihr viele allgemeine Sätze beweisen lassen, mir deren Hilfe sich Aussagen über die Lösungen von Bewegungsgleichungen machen lassen, auch wenn man diese nicht explizit angeben kann. Der
wohl wichtigste derartige Satz ist das Noether-Theorem, wonach es einen Zusammenhang zwischen den
Symmetrien eines Systems und seinen Erhaltungsgrößen. Bis wir zu diesem zentralen Theorem kommen,
müssen wir uns allerdings erst mit einigen neuen Begriffen vertraut machen.
Die Methoden, die wir hier entwickeln werden, lassen sich weit über die Mechanik hinaus auch in
anderen Teilgebieten der Physik anwenden. Daher werden uns die Begriffe, die wir in diesem Kapitel
einführen, fast überall wieder begegnen. Wie schon angedeutet, geht dies sogar so weit, dass sich alle
heute als fundamental angesehenen Theorien in dieses Schema einordnen lassen. Einen Hinweis darauf,
dass zum Beispiel auch die Elektrodynamik eine solche Formulierung zulässt, wird sich am Ende dieses
Kapitels ergeben. Ansonsten werden wir uns hier jedoch nur mit mechanischen Systemen beschäftigen.
Energie und Impuls
Bei der allgemeinen Diskussion der Newtonschen Bewegungsgleichungen für ein System von Punktteilchen hatten wir die Impulse der Teilchen als nützlich Hilfsgrößen eingeführt. Damit konnten wir ein System von Differenzialgleichungen zweiter Ordnung in ein System erster Ordnung überführen. Außerdem
gab es für Systeme ohne äußere Kräfte einen Erhaltungssatz für den Gesamtimpuls, also für die Summe
der Impulse aller Teilchen. Das konnten wir verwenden, um die Bewegungsgleichungen weiter zu vereinfachen und um deren Lösungen zu klassifizieren.
Den Impuls hatten wir als das Produkt von Masse und Geschwindigkeit definiert, weil so seine Zeitableitung durch die Kraft gegeben war, die auf ein Teilchen einwirkt. Wir wollen nun zeigen, dass es noch
eine alternative Definition der Größe “Impuls” gibt. Diese wird sich später als sehr viel allgemeiner erweisen. Sie ist weit über die Mechanik hinaus anwendbar. Sie gibt dem Begriff “Impuls” eine ähnlich wichtige
Bedeutung wie etwa dem Begriff “Energie”, der ja auch in allen Bereichen der Physik von zentraler Bedeutung ist.
Tatsächlich lässt sich der Impuls eines Teilchens aus seiner Energie ableiten, und zwar im wahrsten
Sinne des Wortes. Stellen wir die Geschwindigkeit des Teilchens der Masse m in einem kartesischen
Koordinatensystem durch v = vi ei dar, so ist seine kinetische Energie
T =
1
1
m v · v = m vi vi .
2
2
(11.1)
Es ist üblich, die Funktion, die der Geschwindigkeit die kinetische Energie zuordnet, mit T zu bezeichnen.
Wenn wir sie partiell nach den Komponenten der Geschwindigkeit ableiten, bekommen wir
∂T
= m vi = pi ,
∂vi
42
(11.2)
also die Komponenten des Impulses. Der Impuls ist die Ableitung der Energie nach der Geschwindigkeit.
Das lässt sich verallgemeinern. Für ein System von N Teilchen mit Massen m n ist die gesamte kinetische Energie eine Funktion der Geschwindigkeiten vn = vn,i ei der einzelnen Teilchen,
T =
1X
1X
m n vn · v n =
mn vn,i vn,i .
2 n
2 n
(11.3)
Die Funktion T hängt jetzt von 3 N reellen Variablen ab, nämlich den Komponenten der Geschwindigkeiten vn,i , mit n ∈ {1, . . . , N } als Teilchenindex und i ∈ {x, y, z} als Vektorindex. Für Vektorindizes
soll wieder die Summenkonvention gelten, und da wir eine Orthonormalbasis verwenden, können wir alle
Indizes nach unten schreiben.
Bilden wir nun wieder die partiellen Ableitungen der Funktion T , so finden wir
∂T
= mn vn,i = pn,i .
∂vn,i
(11.4)
Das sind die Komponenten des Impulses des Teilchens Nummer n. Wir können auf diese Weise durch
Ableiten der kinetischen Energie eines Systems von beliebig vielen Teilchen jedem einzelnen Teilchen
seinen Impuls zuordnen.
Der Impuls eines Teilchens ist die Ableitung der kinetischen Energie nach der Geschwindigkeit dieses Teilchens.
Wie sich gleich zeigen wird, ist es an dieser Stelle ganz wesentlich, dass es sich um eine Funktion T
handelt, die von den Geschwindigkeiten aller Teilchen abhängt. Die Funktion T ist also dem System als
ganzes zugeordnet, nicht den einzelnen Teilchen.
Die Bewegungsgleichungen lassen sich nun wie folgt formulieren. Die Teilchen bewegen sich auf Bahnen rn (t), oder in kartesischen Koordinaten rn,i (t). Dann ist natürlich vn (t) = ṙn (t) bzw. vn,i (t) = ṙn,i (t),
und somit
∂T
∂T (t).
(11.5)
=
pn,i (t) =
∂vn,i n = ˙ n (t) ∂ ṙn,i
Der Ausdruck ist so zu verstehen, dass wir erst die Funktion T nach v n,i ableiten, und dann diese Funktion
für vn = ṙn (t) auswerten, also die gegebene Bahnkurve einsetzen, so dass der Ausdruck zu einer Funktion
der Zeit wird. Um die Notation etwas zu verkürzen, schreiben wir dafür auch einfach ∂T /∂ ṙ n,i .
Jetzt müssen wir den Impuls nur noch nach der Zeit ableiten und mit der Kraft gleichsetzen,
d ∂T
ṗn,i (t) =
(t) = Fn,i (t).
(11.6)
dt ∂ ṙn,i
Die Kräfte Fn = Fn,i ei sind in der Regel als Funktionen der Orte und der Geschwindigkeiten gegeben.
Setzen wir wieder die Bahnen rn (t) ein, so ergibt sich eine Funktion der Zeit, die die Ableitung des
Impulses nach der Zeit bestimmt. Die Gleichungen (11.6) bilden dann ein System von 3 N gekoppelten
Differenzialgleichungen zweiter Ordnung für die Koordinatenfunktionen r n,i (t). Dies sind natürlich die
bekannten Newtonschen Bewegungsgleichungen.
Auf den ersten Blick scheint damit nicht viel gewonnen zu sein. Genau genommen sehen die Gleichungen (11.6) sogar ziemlich kompliziert aus, nicht zuletzt wegen der etwas verschachtelten Ableitungen.
Was allerdings auffällt, ist, dass die Massen mn anscheinend aus den Bewegungsgleichungen verschwunden sind. Natürlich sind sie nicht wirklich verschwunden. Aber sie gehen jetzt nur noch implizit über die
Definition der Funktion T ein.
In den Newtonschen Formulierung der Bewegungsgleichungen ist die Masse ein Maß für die Trägheit
eines Teilchens, also das Verhältnis von Impuls zu Geschwindigkeit. Hier ist die Masse statt dessen ein
43
Maß für die kinetische Energie, die ein bewegtes Teilchen besitzt, und der Impuls ist definiert als die
Ableitung der Energie nach der Geschwindigkeit. Das ändert an den mathematischen Zusammenhängen
zwischen diesen Größen nichts, bietet aber eine alternative Interpretation der Begriffe.
Aufgabe 11.1 Wir nehmen an, dass die Kräfte konservativ sind und nur von den Orten der Teilchen
abhängen. Dann existiert ein Potenzial V, das eine Funktion der Orte r n ist, und die Kraft Fn ist der
negative Gradient von V bezüglich des Ortes rn . Folglich gelten die Bewegungsgleichungen
d ∂T
∂V
(t) = Fn,i (t) = −
(t).
(11.7)
dt ∂ ṙn,i
∂rn,i
Andererseits wissen wir, dass in diesem Fall die Energie E = T + V eine Erhaltungsgr öße ist. Man zeige,
dass sich dies aus (11.7) ergibt, wobei man nur annehmen muss, dass die Funktion T rein quadratisch ist,
also homogen vom Grad 2 in den Komponenten den Geschwindigkeiten.
Der Konfigurationsraum
Die Bewegungsgleichungen in der Form (11.6) lassen sich etwas einfacher darstellen, wenn wir das folgende neue Konzept einführen. Wir fassen die Ortskoordinaten r n,i aller N Teilchen als Koordinaten eines
Punktes in einem 3 N -dimensionalen Raum auf. Diesen Raum nennen wir den Konfigurationsraum des
Systems, und wir bezeichnen ihn mit Q.
Der Konfigurationsraum besteht aus allen möglichen Anordnungen der Teilchen im Ortsraum, das heißt
aus allen möglichen Konfigurationen von N Teilchen. Einen Punkt in diesem Raum bezeichnen wir mit
q ∈ Q, und seine Koordinaten mit q µ , wobei µ ein laufender Index ist, der 3 N Werte annimmt. Um
die Beziehung zu den einzelnen Teilchen deutlich zu machen, können wir als Indexmenge die Symbole
µ ∈ {x1 , y1 , z1 , x2 , y2 , z2 , . . . , xN , yN , zN } verwenden. Wir können die Koordinaten aber auch einfach
von 1 bis 3 N durchnummerieren. Wir sagen, dass ein System aus N Teilchen 3 N Freiheitsgrade besitzt.
Die Zahl der Freiheitsgrade eines mechanischen System ist die Dimension des Konfigurationsraumes,
dim Q = 3 N .
Wir schreiben den Index bei q µ nach oben, weil der Konfigurationsraum im allgemeinen kein metrischer
Raum ist. Wir können zwar den Abstand zwischen zwei Punkten oder zwei Teilchen im Ortsraum messen.
Es ist aber eine völlig andere Frage, was unter dem “Abstand” von zwei verschiedenen Konfigurationen
von N Teilchen zu verstehen ist. Jedenfalls gibt es keine unmittelbar auf der Hand liegende Antwort auf
die Frage, wie weit zwei Konfigurationen voneinander entfernt sind. Es gibt auf dem Konfigurationsraum
keine Metrik, folglich auch keine kartesischen Koordinaten, und deshalb müssen wir zwischen Vektoren
und dualen Vektoren unterscheiden.
Wie wird nun die Zeitentwicklung des Systems beschreiben? Offenbar durch eine Bahn q(t) im Konfigurationsraum Q, die zu jedem Zeitpunkt angibt, welche Konfiguration das System gerade einnimmt.
Sie wird explizit durch die Koordinatenfunktionen q µ (t) dargestellt. Das ist eine parametrisierte Kurve in
einem affinen Raum. Wir können daher den Tangentenvektor q̇(t) bilden, dessen Komponenten durch die
Ableitungen q̇ µ (t) gegeben sind. Dies ist ein Vektor in dem zugeordneten Vektorraum TQ des Konfigurationsraumes Q. Um die Sprechweise möglichst einfach zu halten, nennen wir q(t) den Ort und q̇(t) die
Geschwindigkeit des Systems zum Zeitpunkt t. Wir fassen quasi alle Orte der Teilchen zu einem Ort in Q
zusammen, und alle Geschwindigkeiten der Teilchen zu einem Geschwindigkeitsvektor in TQ.
Die oben eingeführte alternative Formulierung der Bewegungsgleichungen für ein System aus N Teilchen stellt sich jetzt wie folgt dar. Zuerst definieren wir die kinetische Energie als Funktion der Geschwindigkeiten der Teilchen, das heißt als Funktion eines Vektors q̇ ∈ TQ. Sie ist eine quadratische Funktion
der Komponenten q̇ µ , die sich ganz allgemein wie folgt schreiben lässt,
T =
1
Mµν q̇ µ q̇ ν .
2
44
(11.8)
Die 3 N ×3 N -Matrix Mµν ist die Massenmatrix des Systems. Für den hier beschriebenen Fall hat sie eine
einfache Diagonalform
m1
m1
0
m1
.
.
Mµν =
(11.9)
.
.
m
N
0
mN
mN
Ihre Einträge sind die Massen der einzelnen Teilchen, wobei jede Masse genau dreimal auftritt, entsprechend den drei Komponenten der Geschwindigkeit, die zu diesem Teilchen gehören. Schreibt man die
Summe über µ und ν in (11.8) explizit aus, so findet man wieder den Ausdruck (11.3).
Dass wir die Massen zu einer Matrix mit zwei unteren Indizes zusammengefasst haben, ist im wesentlichen dadurch motiviert, dass sich diese Matrix nun wie ein symmetrischer Tensor der Stufe (0, 2)
auf dem Konfigurationsraum Q verhält. Durch (11.8) wird eine symmetrische, bilineare Abbildung
M : TQ × TQ → R definiert, so dass T = M (q̇, q̇)/2 ist. Wir werden darauf gleich noch näher
eingehen.
Im nächsten Schritt definieren wir die Impulse, indem wir die partiellen Ableitungen der Funktion T
nach den Komponenten q̇ µ der Geschwindigkeit bilden. Das ergibt
pµ =
∂T
= Mµν q̇ µ .
∂ q̇ µ
(11.10)
Wie man leicht durch Einsetzen der Matrix (11.9) bestätigt, sind das die 3 N Komponenten der Impulse
der einzelnen Teilchen. Diese können wir wieder zu einem 3 N -dimensionalen Vektor zusammenfassen.
Aus (11.10) ergibt sich jedoch, dass die Komponenten pµ ihren Index unten tragen. Folglich ist die Geschwindigkeit q̇ ∈ TQ ein Vektor, während der Impuls p ∈ T∗ Q des Systems ein dualer Vektor ist.
Da die Kraft die Zeitableitung des Impulses ist, muss auch das ein dualer Vektor F ∈ T ∗ Q sein. Es gilt,
in Komponenten aufgeschrieben,
d ∂T
(t)
= Fµ (t).
(11.11)
ṗµ (t) =
dt ∂ q̇ µ
Genau wie die Komponenten pµ des Impulses p ergeben sich die 3 N Komponenten Fµ der Kraft F aus
den ursprünglichen Komponenten Fn,i dadurch, dass wir sie einfach nur neu nummerieren. Wir fassen
den Teilchenindex n und den Vektorindex i zu einem einzigen Vektorindex µ zusammen, der 3 N Werte
annimmt.
Inhaltlich ändert sich an den Bewegungsgleichungen nichts. Es handelt sich noch immer um ein Gleichungssystem für 3 N unbekannte Funktionen, nur dass wir diese jetzt mit q µ (t) bezeichnen. Die Kraft F
ist typischerweise als Funktion des Ortes q und der Geschwindigkeit q̇ gegeben, und sie kann natürlich
auch explizit von der Zeit abhängen. Erst durch Einsetzen einer Bahn q(t) wird daraus eine Funktion, die
nur noch von der Zeit anhängt. Das gleiche gilt für den Impuls. Die partielle Ableitung ∂T /∂ q̇ µ ist eine
Funktion der Geschwindigkeit q̇, und durch Einsetzen einer Bahn q(t) wird sie zu einer Funktion der Zeit.
Dass Kraft und Impuls duale Vektoren auf dem Konfigurationsraum sind, lässt sich auch noch auf eine ganz andere Weise erklären. Für konservative Systeme ist die Kraft der Gradient des Potenzials. Die
potenzielle Energie eines N -Teilchen-Systems ist eine Funktion der Orte der Teilchen, also eine skalare
Funktion V auf dem Konfigurationsraum. Folglich ist der Gradient davon ein dualer Vektor, oder genauer
ein duales Vektorfeld auf Q. Für konservative Systeme, deren Kräfte nur vom Ort abhängen, gilt
∂V
∂V
d ∂T
Fµ = µ ⇒ ṗµ (t) =
(t)
= µ (t).
(11.12)
∂q
dt ∂ q̇ µ
∂q
45
Damit hier die rechte und die linke Seite der Gleichung zusammenpassen, muss auf beiden Seiten ein
dualer Vektor stehen. Das ist auch der Fall, und es impliziert, dass auch der Impuls in dualer Vektor sein
muss.
Damit haben wir bereits die wichtigsten Begriffe eingeführt, die wir zur systematischen Beschreibung
eines allgemeinen mechanischen Systems benötigen.
Die Konfiguration eines mechanischen Systems wird durch einen Punkt im Konfigurationsraum dargestellt. Die Geschwindigkeit ist ein Vektor, Impuls und Kraft sind duale Vektoren
in diesem Raum.
Um ein konkretes mechanisches System zu beschrieben, benötigen wir zwei Informationen über das System. Wir müssen erstens wissen, wie die Geschwindigkeiten mit den Impulsen zusammenhängen. Dies
geschieht durch die Abgabe der Funktion T , die die kinetische Energie als Funktion der Geschwindigkeiten darstellt. Für ein N -Teilchen-System bedeutet das im wesentlichen, dass wir die Massen der Teilchen
kennen müssen. Und wir müssen natürlich zweitens wissen, wie die Kraft F konkret als Funktionen des
Ortes q, der Geschwindigkeit q̇ und der Zeit t gegeben ist. Für ein System mit Potenzialkräften ist das
äquivalent zur Angabe der Potenzialfunktion V.
Aufgabe 11.2 Man betrachte ein System aus drei Teilchen mit Massen m 1 , m2 und m3 , die sich gegenseitig
durch Gravitationskräfte anziehen. Wie sieht in diesem Fall das Potenzial aus? Man mache sich an diesem
Beispiel klar, dass es sich um eine reelle Funktion V auf einem neundimensionalen Raum Q handelt.
Aufgabe 11.3 Die Massenmatrix Mµν eines mechanischen Systems ist symmetrisch und positiv, da die
kinetische Energie stets positiv ist und nur dann gleich Null, wenn alle Teilchen ruhen. Man kann sie
daher als Metrik auf dem Konfigurationsraum interpretieren, der dadurch zu einem metrischen affinen
Raum wird. Wenn man dies tut, welche anschauliche Vorstellung verbindet sich dann mit dem Abstand von
zwei Konfigurationen? Wann liegen zwei gegebene Konfigurationen nahe beieinander, wann sind sie weit
voneinander entfernt?
Ein einfaches Beispiel
Um den Begriff des Konfigurationsraumes etwas besser zu verstehen, betrachten wir ein einfaches Beispiel. Zwei Teilchen wechselwirken miteinander durch eine linear vom Abstand abhängende Kraft. Es
handelt sich im wesentlichen um einen harmonischen Oszillator, der aus zwei Teilchen besteht. Um das
ganze so einfach wie möglich zu halten, und um das Ergebnis auch grafisch darstellen zu können, sollen
sich die Teilchen nur in eine Raumrichtung bewegen. Dadurch sparen wir uns das Ausschreiben einiger
Indizes, verlieren jedoch keine wesentlichen Aspekte von dem, worum es hier gehen soll.
Es seien also m1 und m2 die Massen der beiden Teilchen, q 1 und q 2 ihre Ortskoordinaten, und q̇ 1 und
2
q̇ die Geschwindigkeiten. Die Orte q µ , mit µ ∈ {1, 2}, sind die Koordinaten eines Punktes q ∈ Q,
wobei der Konfigurationsraum Q ein zweidimensionaler affiner Raum ist. Die Geschwindigkeiten q̇ µ sind
entsprechend die Komponenten eines Vektors q̇ ∈ TQ.
Für die kinetische und die potenzielle Energie setzen wir
T =
1
1
m1 (q̇ 1 )2 + m2 (q̇ 2 )2 ,
2
2
V=
1
κ (q 1 − q 2 )2 ,
2
(11.13)
wobei κ eine Federkonstante ist, die die Anziehungskraft zwischen den beiden Teilchen bestimmt. Für die
Impulse ergibt sich daraus, wie nicht anders zu erwarten ist,
p1 =
∂T
= m1 q̇ 1 ,
∂ q̇ 1
p2 =
46
∂T
= m2 q̇ 2 ,
∂ q̇ 2
(11.14)
und für die Komponenten der Kraft gilt
F1 = −
∂V
2
1
1 = κ (q − q ),
∂q
F2 = −
∂V
1
2
2 = κ (q − q ).
∂q
(11.15)
Die Teilchen ziehen sich mit einer linear mit dem Abstand ansteigenden Kraft an. Schließlich ergeben sich
aus dieser Gleichung und der vorigen die Bewegungsgleichungen
ṗ1 = F1 ,
ṗ2 = F2
⇒
m1 q̈ 1 = κ (q 2 − q 1 ),
m2 q̈ 2 = κ (q 1 − q 2 ).
(11.16)
Wir wissen bereits, wie wir diese Gleichungen am einfachsten lösen können. Die Idee besteht im wesentlichen darin, die Bewegung des Schwerpunktes von der relativen Bewegung der Teilchen zu entkoppeln.
Das neue ist, dass wir dies nun als Koordinatentransformation auf dem Konfigurationsraum Q auffassen
können. Die Transformation, die hier zum Ziel führt, ist
q+ =
m2
m1
q1 +
q2,
m1 + m 2
m1 + m 2
q− = q1 − q2,
(11.17)
oder umgekehrt
m2
m1
q −,
q2 = q+ −
q−.
(11.18)
m1 + m 2
m1 + m 2
Da es sich um eine lineare Transformation handelt, gelten die gleichen Umrechnungsformel auch für die
Geschwindigkeiten. Wir müssen nur alle q’s mit einem Punkt versehen, oder einfach die Gleichungen
(11.17) und (11.18) nach der Zeit ableiten. Nach einer kurzen Rechnung findet man dann die folgenden
neuen Ausdrücke für die kinetische und die potenzielle Energie,
q1 = q+ +
T =
1
1
m+ (q̇ + )2 + m− (q̇ − )2 ,
2
2
V=
1
κ (q − )2 ,
2
(11.19)
wobei wir die Abkürzungen
m1 m2
(11.20)
m1 + m 2
für die gesamte und die reduzierte Masse eingeführt haben. Wiederholen wir jetzt die ganze Prozedur noch
einmal, so finden wir die Impulse
m+ = m 1 + m 2 ,
p+ =
m− =
p− =
∂T
= m− q̇ − ,
∂ q̇ −
(11.21)
F− = −
∂V
= −κ q − .
∂q −
(11.22)
∂T
= m+ q̇ + ,
∂ q̇ +
und für die Komponenten der Kraft gilt jetzt
F+ = −
∂V
= 0,
∂q +
Daraus lesen wir wieder die Bewegungsgleichungen ab. Sie haben sich ein wenig vereinfacht und lauten
nun
ṗ+ = F+ , ṗ+ = F+ ⇒ m+ q̈ + = 0,
m− q̈ − = −κ q − .
(11.23)
Die Lösungen dieser Gleichungen können wir sofort angeben. Für q + müssen wir eine gleichförmige
Bewegung einsetzen, das heißt das System bewegt sich mit konstanter Geschwindigkeit in Richtung der
q + -Achse. In Richtung der q − -Achse finden wir eine harmonische Oszillation mit der Eigenfrequenz ω 2 =
κ/m− .
Was haben wir bei dieser Herleitung anders gemacht als früher, als wir ein solches System schon einmal
im Rahmen der Newtonschen Mechanik diskutiert haben? Der wesentliche Unterschied liegt darin, dass
47
q2
q+
replacements
q1
q−
(c)
(d)
(b)
(a)
Abbildung 11.1: Der Konfigurationsraum eines Zwei-Teilchen-Systems mit linearer Wechselwirkung. Die
gestrichelten Geraden sind die Linien konstanter potenzieller Energie V = konst. Die gestrichelte Ellipse
ist eine Linie konstanter kinetischer Energie T = konst im Raum der Geschwindigkeiten. Die durchgezogene Linie ist eine typische Bahn. Die Koordinaten in (a) sind den Teilchen angepasst, die Koordinaten
in (b) den Eigenmoden des Systems.
wir an keiner Stelle die Bewegungsgleichungen selbst transformiert haben. Wir haben nicht die Definitionen (11.18) der neuen Koordinaten in die Bewegungsgleichungen (11.16) eingesetzt. Statt dessen haben
wir nur die zwei Größen, von denen wir ausgegangen sind, nämlich die Funktionen T und V, durch die
neuen Koordinaten ausgedrückt.
In Abbildung 11.1(a) ist der zweidimensionale Konfigurationsraum Q mit der q 1 - und q 2 -Achse dargestellt. Das Potenzial V(q) hängt nur von q 1 − q 2 ab, so dass die Linien mit V = konst Geraden sind, die
parallel zur Winkelhalbierenden verlaufen. Die Linien T = konst im Raum TQ der Geschwindigkeiten
sind Ellipsen, deren Halbachsen durch die Massen m1 und m2 bestimmt sind. Eine solche Ellipse ist in
der Abbildung eingezeichnet.
Nun hatten wir gesehen, dass die Dynamik des Systems, also letztlich die Bewegungsgleichungen, eindeutig durch die beiden Funktion T und V bestimmt wird. Insbesondere ist das dynamische Verhalten des
Systems völlig unabhängig davon, welche Koordinaten wir benutzen, um eine explizite Rechnung durchzuführen. Die Dynamik des Systems ist ein Art geometrische Eigenschaft des Konfigurationsraumes, die
unabhängig von der Wahl irgendeines Koordinatensystems ist, genau wie die Geometrie des Ortsraumes
als abstrakte Struktur unabhängig von den Koordinatensystemen ist, die wir verwenden, um den Raum zu
beschreiben.
Wir können deshalb zu einem beliebigen anderen Koordinatensystem übergehen, das der Dynamik des
Systems besser angepasst ist. Ein solches Koordinatensystem ist in Abbildung 11.1(b) dargestellt. Die q + Achse ist so gewählt, dass sie im Minimum des Potenzials liegt. Daher hängt die Funktion V jetzt nur
noch von q − ab, und zwar unabhängig davon, in welche Richtung die q − -Achse zeigt. Aber auch für diese
Achse gibt es eine bevorzugte Wahl. Sie ist so gelegt, dass in dem quadratischen Ausdruck für T keine
gemischten Terme auftreten, die das Produkt q̇ + q̇ − enthalten.
Aufgabe 11.4 Man zeige, dass die lineare Transformation (11.17) durch diese beiden Forderungen an die
neuen Koordinaten q + und q − bis auf Skalierungen eindeutig festgelegt ist. Die einzige Freiheit, die noch
bleibt, ist eine Transformation q̃ + = α q + und q̃ − = β q − mit Konstanten α, β 6= 0.
48
Das abstrakte Konzept des Konfigurationsraumes eines mechanischen Systems kann also bei der Lösung
der Bewegungsgleichungen hilfreich sein. Es zeigt nämlich, dass die Koordinaten, die sich auf natürliche
Weise aus der physikalischen Situation ergeben, nicht immer die sind, die dem eigentlichen dynamischen
Prozess am besten angepasst sind. In unserem Beispiel liegt es durch die Beschreibung des Systems eigentlich auf der Hand, dass die “natürlichen” Koordinaten diejenigen sind, die sich auf die beiden Teilchen
beziehen, also (q 1 , q 2 ).
Lassen wir jedoch die physikalische Anschauung für einen Moment außer acht, und betrachten nur die
mathematischen Strukturen des Konfigurationsraumes Q, so stellen wir fest, dass diese eine ganz andere
“natürliche” Wahl der Koordinaten nahe legen, nämlich die Koordinaten (q + , q − ). In diesen Koordinaten
nehmen die beiden für die Dynamik relevanten Funktionen T und V eine besonders einfache Form an.
Das Ziel der folgenden Überlegungen ist es deshalb, von der unmittelbaren physikalischen Vorstellung
Abstand zu nehmen, dass die Bewegungen eines mechanischen Systems im dreidimensionalen Ortsraum
stattfinden. Statt dessen wollen wir den Konfigurationsraum als denjenigen Raum betrachten, in dem sich
das System bewegt. Das ist der erste Schritt hin zu einer Abstraktion, die es letztlich auch ermöglicht,
ganz andere dynamische Systeme, wie etwa das elektromagnetische Feld, mit den gleichen Methoden zu
beschreiben und dabei die gleichen mathematischen Strukturen zu verwenden.
Aufgabe 11.5 Es soll ein System von zwei Teilchen gleicher Masse m betrachtet werden, die zus ätzlich
eine lineare rücktreibende Kraft von außen spüren. Diese soll eine Federkonstante κ haben, die Wechselwirkung eine Federkonstante κ̃. Es ist dann
T =
1
m (q̇ 1 )2 + (q̇ 2 )2 ,
2
V=
1
1
κ (q 1 )2 + (q 2 )2 + κ̃ (q 1 − q 2 )2 .
2
2
(11.24)
Man finde eine lineare Transformation zu neuen Koordinaten (q + , q − ), so dass
T =
1
1
m+ (q̇ + )2 + m− (q̇ − )2 ,
2
2
V=
1
1
κ+ (q + )2 + κ− (q − )2
2
2
(11.25)
gilt. Man bestimme die Größen m± und κ± , und daraus die Eigenfrequenzen ω± des System. Sind die
neuen Koordinaten eindeutig bestimmt? Wenn nicht, welche Freiheiten gibt es bei der Wahl?
Aufgabe 11.6 Man wiederhole die einzelnen Schritte in diesem Abschnitt f ür ein System von zwei Teilchen,
die sich im dreidimensionalen Raum bewegen. Um die Zerlegung in Schwerpunkt- und Relativbewegung
durchzuführen, hatten wir in Kapitel 3 den Schwerpunktimpuls (3.53) und den relativen Impuls (3.54)
eingeführt. Man zeige, dass diese Größen den hier definierten Impulsen p+ und p− entsprechen.
Aufgabe 11.7 Der Übergang zwischen den beiden Koordinatensystemen (q 1 , q 2 ) und (q + , q − ) ist eine
affine Koordinatentransformation auf dem Konfigurationsraum Q. Man zeige, dass der Impuls und die
Kraft dabei wie duale Vektoren transformieren. Es gilt also
pα =
∂q µ
pµ ,
∂q α
bzw. pµ =
∂q α
pα ,
∂q µ
mit µ ∈ {1, 2},
α ∈ {+, −},
(11.26)
und entsprechend für Fµ und Fα .
Aufgabe 11.8 Sowohl in (11.13) als auch in (11.19) lässt sich die kinetische Energie durch eine Massenmatrix darstellen. Mit den Bezeichnungen aus Aufgabe 11.7 gilt f ür die Einträge dieser Matrix in den
beiden Koordinatensystemen
M11 = m1 ,
M22 = m2 ,
bzw. M++ = m+ ,
49
M−− = m− ,
(11.27)
und alle anderen Komponenten sind jeweils Null. Man verifiziere, dass f ür diese Matrix das Transformationsverhalten für einen Tensor der Stufe (0, 2) gilt, also
Mαβ =
∂q µ ∂q ν
Mµν ,
∂q α ∂q β
(11.28)
wieder mit µ ∈ {1, 2} und α ∈ {+, −}.
Aufgabe 11.9 In Abbildung 11.1(a) stehen die Koordinatenachsen senkrecht aufeinander, in Abbildung 11.1(b) nicht. Hat dieser Umstand irgendeine Bedeutung?
Aufgabe 11.10 Ist in Abbildung 11.1 m1 oder m2 die größere Masse?
Verallgemeinerte Koordinaten
Wir kehren nun wieder zu der allgemeinen Situation zurück, die bei einem N -Teilchen-System mit beliebigen Wechselwirkungen vorliegt. Die kinetische Energie T ist dann eine quadratische Funktion der
Geschwindigkeit q̇ ∈ TQ, und die Kraft ist ein dualer Vektor F ∈ T∗ Q, der zunächst vom Ort q ∈ Q, der
Geschwindigkeit q̇ ∈ TQ, und möglicherweise auch von der Zeit t abhängt. Weitere Annahmen machen
wir nicht. Insbesondere muss die Kraft nicht konservativ sein.
Dann gelten, wie wir gezeigt haben, die Bewegungsgleichungen (11.11), also
d ∂T
= Fµ .
dt ∂ q̇ µ
(11.29)
Wir erinnern noch einmal daran, was die Notation bedeutet. Die linke Seite ist so zu verstehen, dass wir
zuerst die Funktion T als gewöhnliche Funktion der Komponenten q̇ µ der Geschwindigkeit betrachten,
diese Funktion partiell ableiten, und dann die Bahn q(t) und ihre Ableitung q̇(t) einsetzen. Dadurch wird
der Ausdruck ∂T /∂ q̇ µ zu einer Funktion der Zeit, die wir dann wieder nach t ableiten können.
Wir schreiben wie üblich die partiellen Ableitungen von Funktionen nach ihren Argumenten mit einem
geschwungenen ‘∂’. Dagegen ist die totale Zeitableitung ‘d/dt’ immer so zu verstehen, dass wir den
Ausdruck, auf den sie wirkt, entlang einer bestimmten Bahn q(t) auswerten, und diese Funktion dann
nach t ableiten. An dieser Stelle haben die Ableitungssymbole ‘∂’ und ‘d’ also wirklich unterschiedliche
Bedeutungen.
Da dies im folgenden sehr wichtig ist, machen wir es uns noch einmal dadurch klar, dass wir die Bewegungsgleichungen (11.29) etwas expliziter ausschreiben. Da die Funktion T und damit auch die Ableitungen ∂T /∂ q̇ µ nur indirekt über q̇ µ (t) von der Zeit t abhängen, gilt natürlich die Kettenregel, also
d ∂T ∂2T
∂ 2 T dq̇ ν
=
q̈ ν
=
dt ∂ q̇ µ
∂ q̇ µ ∂ q̇ ν dt
∂ q̇ µ ∂ q̇ ν
⇒
Mµν q̈ ν = Fµ .
(11.30)
Wenn T als quadratische Funktion durch eine Massenmatrix gegeben ist, ist die zweite Ableitung genau
diese Massenmatrix. Wir sehen, dass (11.29) nichts anderes ist als eine etwas ungewöhnliche Darstellung
der Newtonschen Bewegungsgleichungen, wonach Masse mal Beschleunigung gleich Kraft ist.
Es stellt sich daher die Frage, warum wir diese merkwürdige Formulierung überhaupt benutzen. Die Bewegungsgleichung (11.30) sieht doch viel einfacher aus. Sie stellt über die Massenmatrix eine Beziehung
zwischen der Kraft F ∈ T∗ Q und der Beschleunigung q̈ ∈ TQ her, und beschreibt so die Bewegungen des
Systems im Konfigurationsraum auf eine geometrische Art und Weise, die zudem noch unabhängig von der
Wahl der Koordinaten ist. Da alle drei beteiligten Objekte wie Tensoren transformieren, gilt die Gleichung
in jedem affinen Koordinatensystem. Das haben wir gerade verwendet, um die Bewegungsgleichungen für
einen zusammengesetzten harmonischen Oszillator zu entkoppeln
50
Um die Bewegungsgleichungen für ein gegebenes mechanisches System aufstellen und lösen zu können,
genügt das jedoch meistens nicht. Wir müssen auch krummlinige Koordinatensysteme verwenden. Das
Zentralkraftproblem, und insbesondere das Keplersche Problem der Planetenbahnen, konnten wir zum
Beispiel erst erfolgreich angehen, nachdem wir Kugelkoordinaten eingeführt hatten. In krummlinigen Koordinatensystem gilt jedoch die einfache Darstellung (11.30) der Bewegungsgleichungen nicht mehr.
Zwar können wir die Massenmatrix Mµν auch in einem krummlinigen Koordinatensystem darstellen,
wobei ihre Komponenten dann ortsabhängig werden. Um jedoch die Beschleunigung in krummlinigen
Koordinatensystemen darzustellen, benötigen wir eine kovariante Ableitung. Dies hatten wir in Kapitel 10
und insbesondere in Aufgabe 10.26 gesehen. Es genügt nicht, einfach die zweite Ableitung der Koordinatenfunktionen q µ (t) zu bilden.
Es stellt sich nun heraus, dass es sehr viel einfacher ist, die Gleichung (11.29) in ein krummliniges Koordinatensystem zu transformieren, als die scheinbar einfachere Gleichung (11.30). Wir müssen dazu noch
nicht einmal das Konzept der kovarianten Ableitung explizit verwenden, obwohl wir letztlich wieder eine
solche bilden werden. Zudem ist das Ergebnis so allgemein, dass wir von der kinetischen Energie noch
nicht einmal annehmen müssen, dass sie homogen vom Grad 2 ist, also quadratisch in den Geschwindigkeiten. Das wird sich später als nützlich erweisen, wenn wir sehr viel allgemeinere Bewegungsgleichungen
betrachten.
Das Ziel ist nun, die Bewegungsgleichung (11.29) in einem krummlinigen Koordinatensystem auf dem
Konfigurationsraum Q darzustellen. Dazu sei weiterhin {q µ } ein affines Koordinatensystem, in dem die
Gleichung in der angegebenen Form gelten soll. Die krummlinigen Koordinaten bezeichnen wir mit {q α }.
Oft nennt man diese auch verallgemeinerte oder generalisierte Koordinaten.
Die Unterscheidung zwischen den beiden Koordinatensystemen erfolgt, wie bisher auch, durch zwei
verschiedene Indexmengen. Für die affinen Koordinaten verwenden wir die Indizes µ, ν, . . ., für die verallgemeinerten Koordinaten die Indizes α, β, . . .. Für ein N -Teilchen-System können die Koordinaten q µ
zum Beispiel die kartesischen Ortskoordinaten {x1 , y1 , z1 , . . . , xN , yN , zN } der einzelnen Teilchen sein,
und als verallgemeinerte Koordinaten q α können wir die Darstellungen derselben Orte in Kugelkoordinaten {r1 , ϑ1 , ϕ1 , . . . , rN , ϑN , ϕN } verwenden.
Die Umrechnung zwischen den beiden Koordinatensystemen erfolgt dadurch, dass wir die affinen Koordinaten q µ als Funktionen der verallgemeinerten Koordinaten q α darstellen. Um ein möglichst allgemeines
Ergebnis zu bekommen, lassen wir sogar zu, dass diese Funktionen explizit von der Zeit abhängen. Mit
anderen Worten, wir können sogar zu jedem Zeitpunkt ein anderes krummliniges Koordinatensystem verwenden. Die Übergangsfunktionen haben dann die Form
(11.31)
q µ = q µ {q α }, t .
Nun betrachten wir eine Bahn q(t) des Systems im Konfigurationsraum. In krummlinigen Koordinaten
wird diese Bahn durch einen Satz von Funktionen q α (t) dargestellt. Folglich gilt für die Darstellung derselben Bahn in affinen Koordinaten
q µ (t) = q µ {q α (t)}, t .
(11.32)
Wenn wir diese Gleichung nach der Zeit ableiten, finden wir die affinen Komponenten q̇ µ (t) der Geschwindigkeit, ausgedrückt durch die verallgemeinerten Koordinaten q α (t) und deren Zeitableitungen q̇ α (t), den
verallgemeinerten Geschwindigkeiten. Auf der rechten Seite müssen wir dazu die partiellen Ableitungen
der affinen Koordinaten nach den krummlinigen Koordinaten bilden, und zusätzlich die partielle Ableitung
der Übergangsfunktionen nach der Zeit,
∂q µ
∂q µ
{q α (t)}, t .
(11.33)
q̇ µ (t) = α {q α (t)}, t q̇ α (t) +
∂q
∂t
Wir schreiben das etwas verkürzt in der Form
∂q µ
∂q µ
.
(11.34)
q̇ µ = α q̇ α +
∂q
∂t
51
Der erste Term beschreibt wie üblich die Transformation eines Vektors von einem Koordinatensystem in
ein anderes. Der zweite Term tritt auf, weil das krummlinige Koordinatensystem zusätzlich von der Zeit
abhängen kann. Wenn die Koordinaten q α (t) zeitlich konstant sind, so bedeutet das nämlich nicht, dass die
Teilchen ruhen, also die Konfiguration q(t) zeitlich konstant ist.
Nun können wir die kinetische Energie T als Funktion der neuen Koordinaten ausdrücken. Ursprünglich
war T ({q̇ µ }) eine Funktion, die nur von den Komponenten q̇ µ der Geschwindigkeit abhing. Da diese aber
nun über (11.34) sowohl von den verallgemeinerten Geschwindigkeiten q̇ α als auch von den verallgemeinerten Koordinaten q α und sogar der Zeit t abhängen, wird die kinetische Energie jetzt zu einer Funktion
T ({q α }, {q̇ α }, t).
Das ist letztlich nichts anderes als die weiter oben bereits gemachte Feststellung, dass die Massenmatrix
eines mechanischen Systems in krummlinigen Koordinaten ortsabhängig wird, da es sich um die Darstellung eines Tensors in einem krummlinigen Koordinatensystem handelt. Da dieses Koordinatensystem
zudem von der Zeit abhängt, ergibt sich zusätzlich noch eine Zeitabhängigkeit.
In krummlinigen Koordinaten hängt die kinetische Energie vom den Ortskoordinaten, den
Komponenten der Geschwindigkeit und explizit von der Zeit ab.
Am besten machen wir uns das wieder an einem Beispiel klar. Wir betrachten ein einzelnes Teilchen, das
sich frei im Raum bewegt. Als affine Koordinaten q µ verwenden wir (x, y, z), und als verallgemeinerte
Koordinaten q α , um auch eine explizite Zeitabhängigkeit zu bekommen, rotierende Zylinderkoordinaten
(r, ϕ, z). Die zeitabhängigen Übergangsfunktionen (11.31) sollen explizit durch
x = r cos(ϕ − ω t),
y = r sin(ϕ − ω t)
(11.35)
gegeben sein. Die Winkelgeschwindigkeit ω gibt an, wie schnell sich das Koordinatensystem dreht. Die
Koordinate z bleibt einfach unverändert. Sie spielt in den folgenden Überlegungen keine Rolle. Wenn wir
diese Gleichungen nach der Zeit t ableiten, finden wir
ẋ = ṙ cos(ϕ − ω t) − (ϕ̇ − ω) r sin(ϕ − ω t),
ẏ = ṙ sin(ϕ − ω t) + (ϕ̇ − ω) r cos(ϕ − ω t).
(11.36)
Das sind die explizit ausgeschriebenen Gleichungen (11.34) für dieses spezielle Beispiel. Die rechten
Seiten hängen nicht nur von den verallgemeinerten Geschwindigkeiten (ṙ, ϕ̇) ab, sondern auch von den
Koordinaten (r, ϕ) und sogar explizit von der Zeit t. Für die kinetische Energie ergibt sich
T =
1
1
m (ẋ2 + ẏ 2 + ż 2 ) = m (ṙ 2 + r 2 (ϕ̇ − ω)2 + ż 2 ).
2
2
(11.37)
Auch diese Funktion ist wieder quadratisch in den verallgemeinerten Geschwindigkeiten, aber sie hängt
zusätzlich von r ab, und sie enthält auch noch Terme, die proportional zu ω und ω 2 sind. Das ist auch
klar, denn die kinetische Energie eines Teilchens, dass in diesem Koordinatensystem “ruht”, kreist ja in
Wirklichkeit mit der Winkelgeschwindigkeit ω um den Ursprung.
Aufgabe 11.11 In welcher konkreten physikalischen Situation w ürde die Wahl eines solchen Koordinatensystems nahe liegen?
Aufgabe 11.12 Man ersetze in (11.35) ω t durch eine beliebige Funktion γ(t) und zeige, dass sich dann
auch eine explizit zeitabhängige Energiefunktion T ergibt.
52
Die d’Alembertschen Gleichungen
Wir wollen nun die Bewegungsgleichungen in krummlinigen Koordinaten darstellen. Da die kinetische
Energie T ursprünglich nur eine Funktion der Geschwindigkeiten q̇ µ war, können wir die partiellen Ableitungen von T nach q α und q̇ α durch die Ableitungen der ursprünglichen Funktion T nach q̇ µ ausdrücken.
Mit Hilfe der Kettenregel finden wir
∂T
∂T ∂ q̇ µ
∂T ∂q µ
=
=
.
∂ q̇ α
∂ q̇ µ ∂ q̇ α
∂ q̇ µ ∂q α
(11.38)
Hier haben wir verwendet, dass aus (11.34) ∂ q̇ µ /∂ q̇ α = ∂q µ /∂q α folgt.
Die partiellen Ableitungen ∂q µ /∂q α , die in (11.38) vorkommen, sind die ortsabhängigen Übergangsmatrizen für die Koordinatentransformation von {q µ } nach {q α }. Wir haben also gezeigt, dass sich die
partiellen Ableitungen pα = ∂T /∂ q̇ α bzw. pµ = ∂T /∂ q̇ µ bei einer Koordinatentransformation wie die
Komponenten eines dualen Vektors verhalten. Dies ist natürlich der Impulsvektor p ∈ T ∗ Q des Systems.
Seine Komponenten pα bezüglich des krummlinigen Koordinatensystems werden auch als verallgemeinerte Impulse bezeichnet.
Die entsprechende Rechnung für die partiellen Ableitungen von T nach den Koordinaten q α ist etwas
komplizierter, da wir dazu die rechte Seite von (11.34) nochmal nach q α ableiten müssen. Das ergibt
∂T ∂ q̇ µ
∂T ∂ 2 q µ β
∂T
∂2qµ = µ α = µ
q̇ + α
.
∂q α
∂ q̇ ∂q
∂ q̇
∂q ∂t
∂q α ∂q β
(11.39)
Wir wollen nun versuchen, die linke Seite der Gleichung (11.29) durch die krummlinigen Koordinaten
auszudrücken. Als Ansatz bietet sich dazu an, die Zeitableitung von (11.38) zu bilden,
d ∂T
d ∂T ∂q µ d ∂T ∂q µ
∂T d ∂q µ =
+
=
.
dt ∂ q̇ α
dt ∂ q̇ µ ∂q α
dt ∂ q̇ µ ∂q α ∂ q̇ µ dt ∂q α
(11.40)
Auch das ist natürlich wieder so zu verstehen, dass wir zuerst die partiellen Ableitungen bilden, dann eine
Bahn q(t) einsetzen, die wir jetzt wahlweise durch die Koordinatenfunktionen q µ (t) oder q α (t) darstellen
können, und anschließend die totalen Zeitableitungen d/dt bilden.
Der erste Term in der Klammer ist genau der, den wir suchen, nämlich die linke Seite von (11.29). Um
den zweiten Term weiter umzuformen, benutzen wir, dass die affinen Koordinaten q µ sowohl implizit über
die krummlinigen Koordinaten als auch explizit von der Zeit abhängen. Daher gilt
∂2qµ
∂2 qµ β
d ∂q µ
= α β q̇ + α .
dt ∂q α
∂q ∂t
∂q ∂q
(11.41)
Das ist aber genau der Ausdruck in der Klammer in (11.39). Wir finden also
d ∂T ∂q µ
∂T
d ∂T
−
=
.
dt ∂ q̇ α ∂q α
dt ∂ q̇ µ ∂q α
(11.42)
Um das für die Bewegungsgleichung zu verwenden, multiplizieren wir diese mit der Übergangsmatrix
∂q µ /∂q α und setzen
∂q µ
Fα = α Fµ .
(11.43)
∂q
Die Größen Fα werden als verallgemeinerte Kräfte bezeichnet. Es sind die Komponenten des Kraftvektors
F ∈ T∗ Q, dargestellt in den krummlinigen Koordinaten. Die Gleichung (11.43) beschreibt wieder das
Transformationsverhalten eines dualen Vektors unter einer Koordinatentransformation.
53
Wenn wir nun dies und (11.42) in die Bewegungsgleichung (11.29) einsetzen, so lassen sich diese
schließlich wie folgt schreiben,
∂T
d ∂T
d’Alembertsche
= Fα .
(11.44)
α −
Bewegungsgleichung
dt ∂ q̇
∂q α
Die in dieser Form dargestellten Bewegungsgleichungen für ein mechanisches System heißen
d’Alembertsche Gleichungen. Bis auf den zusätzlichen Term auf der linken Seite, der die Abhängigkeit
der kinetischen Energie von den Koordinaten berücksichtigt, haben sie die gleiche Form wie vorher die
Gleichungen (11.29) in affinen Koordinaten. Und es gibt natürlich wieder eine reelle Gleichung für jeden
Freiheitsgrad des Systems.
Tatsächlich verschwindet der zusätzliche Term auf der linken Seite, wenn der Zusammenhang zwischen
q µ und q α affin und zeitunabhängig ist. Dann sind die neuen Geschwindigkeiten q̇ α lineare Funktionen der
alten Geschwindigkeiten q̇ µ , und somit hängt auch die kinetische Energie nur von q̇ α , aber nicht von q α
ab. Die allgemeinere Form (11.44) gilt also auch für affine Koordinatensysteme.
Um die Bewegungsgleichungen für ein spezielles mechanisches System auf diese Form zu bringen,
müssen wir nur zwei Dinge tun. Wir müssen die kinetische Energie T als Funktion der verallgemeinerten
Koordinaten und deren Zeitableitungen darstellen, und wir müssen dasselbe mit der Kraft F tun. Bei der
Kraft müssen wir zusätzlich beachten, dass es sich dabei um einen dualen Vektor handelt. Wir müssen
deshalb gemäß (11.43) den Index transformieren.
Um an unserem Beispiel von oben zu demonstrieren, dass die d’Alembertschen Gleichungen tatsächlich
die richtigen Bewegungsgleichungen sind, setzen wir für T die Funktion (11.37) ein. Die Kraft soll der
Einfachheit halber verschwinden, und wir setzen auch ω = 0. Das Zylinderkoordinatensystem soll also
nicht rotieren. Dann ergeben sich nach einer kurzen Rechnung die folgenden Bewegungsgleichungen
d
dt
d
dt
∂T
∂T
d
−
=
m ṙ − m r ϕ̇2 = 0,
∂ ṙ
∂r
dt
∂T
∂T
d
d ∂T
∂T
d
−
=
m r 2 ϕ̇ = 0,
−
=
m ż = 0.
∂ ϕ̇
∂ϕ
dt
dt ∂ ż
∂z
dt
(11.45)
Das bemerkenswerte an diesem Beispiel ist, dass die beiden letzten Gleichungen ganz automatisch die entscheidenden Erhaltungssätze liefern, die wir benutzen können, um die Bewegungsgleichungen zu lösen.
Es ist nämlich m ż = pz die Impulskomponente in z-Richtung, und pϕ = m r 2 ϕ̇ der Drehimpuls um die
z-Achse. Beides sind natürlich für ein kräftefreies Teilchen Erhaltungsgrößen.
Ebenfalls bemerkenswert ist, dass die Komponente pϕ = ∂T /∂ ϕ̇ des Impulses nach unserer neuen,
allgemeinen Definition, wonach der Impuls die Ableitung der Energie nach der Geschwindigkeit ist, gerade
der Drehimpuls ist, der einer Rotation in Richtung der Koordinaten ϕ entspricht. Anscheinend passt sich
der Begriff “Drehimpuls” sehr gut in dieses allgemeine Konzept ein. Darauf werden wir später aber noch
im Detail eingehen.
Aufgabe 11.13 Man finde die allgemeine Lösung der Bewegungsgleichungen (11.45) und zeige, dass sich
in dem dargestellten Beispiel auch für ω 6= 0 aus den d’Alembertschen Gleichungen die richtigen Bewegungsgleichungen für ein freies Teilchen ergeben.
Aufgabe 11.14 Welche physikalischen Dimensionen haben die verallgemeinerten Koordinaten (r, ϕ, z) in
dem gezeigten Beispiel? Welche physikalischen Dimensionen haben folglich die verallgemeinerten Impulse
(pr , pϕ , pz ) und Kräfte (Fr , Fϕ , Fz ), wenn diese nicht gleich Null gesetzt sind?
Aufgabe 11.15 Die kinetische Energie T sei eine homogene quadratische Funktion der verallgemeinerten
Geschwindigkeiten q̇ α . Sie hänge nicht explizit von t, aber in irgendeiner Weise von den verallgemeinerten Koordinaten q α ab. Man zeige, dass dann die zeitliche Änderung der kinetischen Energie durch die
54
mechanische Leistung gegeben ist, die sich als Produkt von Kraft und Geschwindigkeit ergibt,
dT
= F · q̇ = Fµ q̇ µ = Fα q̇ α .
dt
(11.46)
Warum kann die rechte Seite dieser Gleichung in jedem beliebigen Koordinatensystem ausgewertet werden?
Aufgabe 11.16 Man zeige, dass sich die linke Seite der d’Alembertschen Gleichung wie ein dualer Vektor
transformiert, und zwar beim Übergang von einem beliebigen krummlinigen Koordinatensystem zu einem
beliebigen anderen. Man führe dazu einen zweiten Satz von krummlinigen Koordinaten q µ ein, stelle diese
als Funktionen von q α dar, und zeige
d ∂T
∂T
∂q µ d ∂T
∂T .
(11.47)
−
=
−
dt ∂ q̇ α ∂q α
∂q α dt ∂ q̇ µ ∂q µ
Die gerade durchgeführte Herleitung, bei der die Koordinaten q µ affin waren, ist also nur ein Spezialfall
von diesem allgemeinen Transformationsverhalten.
Die Lagrange-Funktion
Besonders einfach ist die Situation dann, wenn alle auftretenden Kräfte Potenzialkräfte sind. Dann ist
nämlich die Kraft der Gradient des Potenzials, und dann gilt natürlich in jedem Koordinatensystem, dass
die Komponenten dieses dualen Vektors durch die partiellen Ableitungen nach den Koordinaten gegeben
sind. Explizit,
∂V
∂q µ
∂q µ ∂V
∂V
Fµ = − µ ⇒ F α = α Fµ = − α µ = − α .
(11.48)
∂q
∂q
∂q ∂q
∂q
Das Potenzial kann dabei auch von t abhängen, und die Umrechnungsformel (11.48) gilt auch dann, wenn
die verallgemeinerten Koordinaten q α aus q µ durch eine zeitabhängige Transformation auseinander hervor
gehen. In diesem Fall sind die Übergangsmatrizen ∂q µ /∂q α zwar zeitabhängig, aber die Beziehung (11.48)
gilt immer noch zu jedem Zeitpunkt.
Die d’Alembertschen Bewegungsgleichungen lauten jetzt
∂T
∂V
d ∂T
= 0.
α −
α +
dt ∂ q̇
∂q
∂q α
(11.49)
Da das Potenzial V nicht von der Geschwindigkeit abhängt, lässt sich das sogar noch einfacher schreiben.
Wir definieren eine Funktion
LagrangeFunktion
L = T − V,
(11.50)
die auch wieder vom Ort, der Geschwindigkeit und eventuell explizit von der Zeit abhängt. Diese Funktion
heißt Lagrange-Funktion.
Die Lagrange-Funktion ist die Differenz von kinetischer und potenzieller Energie.
Mit dieser Funktion können die d’Alembertschen Bewegungsgleichungen in einer sehr kompakten Form
geschrieben werden, nämlich
d ∂L
∂L
Lagrange−
= 0.
(11.51)
α
Gleichung
dt ∂ q̇
∂q α
Die gesamte Dynamik eines mechanischen System wird somit durch eine einzige Funktion L auf dem
Konfigurationsraum beschrieben. Diese Funktion können wir in einem beliebigen Koordinatensystem darstellen, so dass die Lagrange-Gleichung (11.51) auch in jedem beliebigen Koordinatensystem ausgewertet
55
werden kann. Auch hier ergibt sich natürlich wieder eine reelle Differenzialgleichung für jeden Freiheitsgrad, also für jeden Wert, den der Index α annehmen kann.
Für die explizite Herleitung von Bewegungsgleichungen für mechanische System ist die LagrangeFunktion ein sehr effizientes Werkzeug. Wir wollen das am Beispiel des allgemeinen Zentralkraftproblems
demonstrieren. Ein Teilchen der Masse m befinde sich in einem Potenzial V = V (r). Seine kinetische
Energie, in Kugelkoordinaten ausgedrückt, ist
T =
1
m ṙ 2 + r 2 ϑ̇2 + r 2 sin2 ϑ ϕ̇2 .
2
(11.52)
Aufgabe 11.17 Wieso ergibt sich dieser Ausdruck unmittelbar aus der Darstellung (10.54) der Euklidischen Metrik in Kugelkoordinaten?
Die Lagrange-Funktion für dieses System ist folglich
L=T −V =
1
m ṙ 2 + r 2 ϑ̇2 + r 2 sin2 ϑ ϕ̇2 − V (r).
2
(11.53)
Diese Funktion müssen wir jetzt nur noch in (11.51) einsetzen und die entsprechenden partiellen Ableitungen bilden, um die Bewegungsgleichungen zu bekommen,
d
∂L ∂L
m ṙ − m r ϑ̇2 − m r sin2 ϑ ϕ̇2 + V 0 (r) = 0,
−
=
∂ ṙ
∂r
dt
d
∂L ∂L
m r 2 ϑ̇ − m r 2 sin ϑ cos ϑ ϕ̇2 = 0
−
=
∂ϑ
dt
∂ ϑ̇
d ∂L ∂L
d
m r 2 sin2 ϑ ϕ̇ = 0.
−
=
dt ∂ ϕ̇ ∂ϕ
dt
d
dt
d
dt
(11.54)
Aus der zweiten Gleichung entnehmen wir, dass diese für ϑ(t) = π/2 erfüllt ist. Es ist also möglich, dass
sich das Teilchen nur in der Äquatorebene aufhält. Tatsächlich genügt es dazu, die Anfangsbedingungen
ϑ(t0 ) = π/2 und ϑ̇(t0 ) = 0 zu wählen. Die erste und die dritte Gleichung vereinfachen sich dann zu
d
m ṙ − m r ϕ̇2 + V 0 (r) = 0,
dt
d
m r 2 ϕ̇ = 0.
dt
(11.55)
Wir finden wieder die Drehimpulserhaltung pϕ = m r 2 ϕ̇ = konst, und für die radiale Bewegungsgleichung können wir ein effektives Potenzial einführen,
m r̈ = −Ve 0 (r),
pϕ2
mit Ve (r) = V (r) +
.
2 m r2
(11.56)
Was wir in Kapitel 8 erst durch mühsames Umrechnen der Koordinaten herleiten mussten, ergibt sich hier
ohne größeren Aufwand, indem wir einfach die Lagrange-Funktion in Kugelkoordinaten darstellen.
Natürlich haben wir dafür schon ein wenig Vorarbeit geleistet, indem wir zum Beispiel die Euklidische
Metrik in Kugelkoordinaten dargestellt haben, so dass wir dies in (11.52) verwenden konnten. Trotzdem
ist die Herleitung jetzt sehr viel einfacher. Denn wir haben hier nicht nur, wie in Kapitel 8, die Bewegungsgleichungen für ein Teilchen in der Äquatorebene bekommen, sondern mit (11.54) auch die für ein
Teilchen, das sich beliebig im Raum bewegt und eine nicht verschwindende Geschwindigkeit ϑ̇ hat. Das
wäre mit den Methoden in Kapitel 8 ungleich schwieriger gewesen.
Aufgabe 11.18 Man zeige, dass der Ausdruck für pϕ = m r 2 sin2 ϑ ϕ̇ in der letzten Gleichung in (11.54)
auch für ϑ 6= π/2 die z-Komponente des Drehimpulses des Teilchens ist.
56
Aufgabe 11.19 Am Beispiel des gekoppelten harmonischen Oszillators von weiter oben, und auch schon
früher in Kapitel 6, hatten wir gesehen, dass eine nützlich Strategie zur Lösung von Bewegungsgleichungen
deren Entkoppelung ist. Man beweise folgenden allgemeinen Satz. L ässt sich die Lagrange-Funktion eines
mechanischen Systems als Summe von zwei Funktionen L = L1 + L2 schreiben, wobei L1 nur von einem
Teil der Koordinaten abhängt, und L2 nur von den übrigen Koordinaten, so sind die beiden Sätze von
Bewegungsgleichungen unabhängig voneinander. Sie können unabhängig voneinander gelöst werden, so
als würde es sich um zwei voneinander getrennte mechanische System handeln.
Aufgabe 11.20 Man wende den Satz aus Aufgabe 11.19 auf ein System von zwei Teilchen an, die sich
frei im dreidimensionalen Raum bewegen und durch die Gravitationskraft anziehen. Welches sind hier
die am besten geeigneten verallgemeinerten Koordinaten, in denen die Lagrange-Funktion sogar in vier
unabhängige Summanden zerfällt?
Kräfte und Potenziale
Die d’Alembertsche Formulierung der Bewegungsgleichungen können wir für jedes mechanische System
verwenden. Wir müssen nur, wenn wir ein krummliniges oder sogar zeitabhängiges Koordinatensystem
verwenden, die Komponenten der Kräfte entsprechend in die verallgemeinerten Kräfte umrechnen. Wir
können dies tun, indem wir direkt die Teilchenkoordinaten r n,i bzw. die Teilchenorte rn im dreidimensionalen Raum als Funktionen der krummlinigen Koordinaten q α auf dem Konfigurationsraum darstellen,
also
rn,i = rn,i {q α }, t
bzw. rn = rn {q α }, t .
(11.57)
Hier ist n wieder der Teilchenindex, und i der Index für ein kartesisches Koordinatensystem im dreidimensionalen Raum. Die verallgemeinerten Kräfte Fα ergeben sich dann aus der allgemeinen Formel (11.43),
wobei wir die Summe über den Index µ aufspalten müssen in eine Summe über die Teilchen n und eine
Summe über die Vektorkomponenten i. Das ergibt
Fα =
X ∂rn,i
n
∂q α
Fn,i =
X ∂rn
n
∂q α
· Fn .
(11.58)
Die Summe über den Vektorindex i können wir auch wieder als Skalarprodukt im Euklidischen Raum
schreiben. In dieser Form lassen sich die verallgemeinerten Kräfte oft am einfachsten berechnen.
Als Beispiel betrachten wir eine Reibungskraft als typisches Beispiel für eine Kraft, die sich nicht aus
einem Potenzial ableiten lässt. Das System bestehe aus nur einem Teilchen, und wir benutzen Zylinderkoordinaten (r, ϕ, z). Der Ort des Teilchens ist dann
r = o + r cos ϕ ex + +r sin ϕ ey , +z ez ,
(11.59)
wobei (ex , ey , ez ) eine Orthonormalbasis ist. Die kinetische Energie entnehmen wir aus (11.37), indem
wir dort ω = 0 setzen,
1
T = m (ṙ 2 + r 2 ϕ̇2 + ż 2 ).
(11.60)
2
Von der Kraft nehmen an, dass es sich um eine lineare Reibungskraft handelt. Sie soll proportional zur
Geschwindigkeit und ihr entgegengerichtet sein,
F = −η ṙ
⇒
Fα =
∂r
∂r
∂r ∂r β
q̇ .
·
α · F = −η
α · ṙ = −η
∂q
∂q
∂q α ∂q β
(11.61)
Die Summe über n in (11.58) ist hier trivial, da nur ein Teilchen vorhanden ist. Der letzte Ausdruck
ergibt sich, indem wir die Geschwindigkeit ṙ mit Hilfe der Kettenregel als Funktion der verallgemeinerten
57
Geschwindigkeiten q̇ α ausdrücken. Die Skalarprodukte
gαβ =
∂r ∂r
∂ri ∂ri
∂ri ∂rj
= α β = α β δij
α ·
β
∂q ∂q
∂q ∂q
∂q ∂q
(11.62)
für α, β ∈ {r, ϕ, z} haben wir bereits einmal ausgerechnet. Das sind nämlich die Komponenten der Metrik
in Zylinderkoordinaten, die in kartesischen Koordinaten durch g ij = δij dargestellt wird. Mit (10.49), um
die Koordinate z ergänzt, ergibt sich
grr = 1,
gϕϕ = r 2 ,
gzz = 1,
(11.63)
und alle anderen Komponenten sind gleich Null. Im Falle eines Ein-Teilchen-Systems wird auf diese Weise
natürlich auch auf dem Konfigurationsraum eine Metrik definiert, und diese können wir in beliebigen
krummlinigen Koordinatensystemen darstellen. Für die verallgemeinerten Kräfte ergibt sich daraus
Fα = −η gαβ q̇ β
⇒
Fr = −η ṙ,
Fϕ = −η r 2 ϕ̇,
Fz = −η ż.
(11.64)
Die verallgemeinerten Kräfte sind nicht einfach proportional zu den verallgemeinerten Geschwindigkeiten, sondern es tritt bei der ϕ-Komponente eine ortsabhängige Proportionalitätskonstante auf. Dafür gibt
es wieder eine einfache geometrische Erklärung. Die Kraft ist ein dualer Vektor, die Geschwindigkeit dagegen ein Vektor. Deshalb wird der Zusammenhang zwischen den beiden durch die Metrik hergestellt, und
deren Komponenten sind in krummlinigen Koordinaten ortsabhängig.
Die linke Seite der d’Alembertschen Gleichung hatten wir bereits in (11.45) ausgerechnet. Auf der
rechten Seite steht jetzt die Kraft (11.64). Folglich ergeben sich für das Teilchen mit linearer Reibung die
Bewegungsgleichungen
d
m ṙ = m r ϕ̇2 − η ṙ,
dt
d
m r 2 ϕ̇ = −η r 2 ϕ̇,
dt
d
m ż) = −η ż.
dt
(11.65)
Aufgabe 11.21 Man gebe die Lösung dieser Bewegungsgleichungen mit den Anfangsbedingungen
r(0) = ρ,
ṙ(0) = 0,
ϕ(0) = 0,
ϕ̇(0) = ω,
z(0) = 0,
ż(0) = v
(11.66)
an. Der Trick besteht auch hier darin, zuerst die Bewegungsgleichungen f ür den Drehimpuls pϕ = m r 2 ϕ̇
zu lösen. Es handelt sich zwar jetzt nicht mehr um eine Erhaltungsgr öße, aber sie lässt sich dennoch lösen,
und danach entkoppeln die übrigen Bewegungsgleichungen.
Aufgabe 11.22 Man führe die gleiche Rechnung in Kugelkoordinaten aus. Welche verallgemeinerten
Komponenten (Fr , Fϑ , Fϕ ) ergeben sich in diesem Fall für die die Reibungskraft?
Natürlich sind Zylinder- oder Kugelkoordinaten in diesem Fall nicht die am besten an das Problem angepassten Koordinaten. Die Bewegungsgleichungen in kartesischen Koordinaten sind viel einfacher, da sie
für eine lineare Reibungskraft unmittelbar entkoppeln. Wir können aber eine kleine Variation an diesem
Problem vornehmen, so dass das nicht mehr der Fall ist.
Das leicht veränderte Problem dient gleichzeitig als Beispiel für eine verallgemeinerte Form der Bewegungsgleichungen, die sich als Kombination der d’Alembertschen und Lagrangeschen Form ergibt.
Da Kräfte additiv sind, können wir sie in konservative Kräfte und solche Kräfte zerlegen, die sich nicht
aus einem Potenzial ableiten lassen. Wir fassen dann alle konservativen Kräfte zu einem Potenzial V
zusammen und definieren wie üblich eine Lagrange-Funktion L = T − V. Dann müssen wir aber die
nicht-konservativen Kräfte noch zusätzlich in die Bewegungsgleichungen aufnehmen, indem wir ihre verallgemeinerten Komponenten Fα auf die rechte Seite schreiben.
58
Als Kombination der Bewegungsgleichungen (11.44) und (11.51) ergibt sich dann
allgemeine
Bewegungsgleichung
∂L
d ∂L
= Fα .
α −
dt ∂ q̇
∂q α
(11.67)
Für V = 0 ist L = T , und es ergibt sich wieder die d’Alembertsche Formulierung. Für F α = 0 sind alle
Kräfte konservativ, und es ergibt sich die Lagrangesche Formulierung.
Als Beispiel fügen wir zu unserem oben definierten Teilchen mit Reibungskraft ein Potenzial V = V (r)
hinzu, das nur vom Abstand von der z-Achse abhängen soll. In diesem Fall sind die Zylinderkoordinaten
etwas besser an das Problem angepasst, denn dann hängt das Potenzial nur von einer Koordinate ab. Wir
können uns als Realisierung eines solchen Systems ein elektrisch geladenes Teilchen vorstellen, das sich
in einem Medium, das eine Reibung verursacht, in der Nähe eines geladenen Drahtes befindet.
Um die Bewegungsgleichungen in der Form (11.67) aufzuschreiben, müssen wir nur statt der kinetischen Energie (11.60) die Lagrange-Funktion
L=T −V =
1
m ṙ 2 + r 2 ϕ̇2 + ż 2 − V (r)
2
(11.68)
verwenden. Die Reibungskraft ist die gleiche wie vorher. Folglich ändert sich nur die Bewegungsgleichung
für die Koordinate r, denn nur in sie geht die Ableitung des Potenzials ein. Es genügt außerdem, nur die
Bewegungsgleichungen für r und ϕ zu betrachten, da die Bewegung in z-Richtung ohnehin entkoppelt,
d
m ṙ = m r ϕ̇2 − η ṙ − V 0 (r),
dt
d
m r 2 ϕ̇ = −η r 2 ϕ̇.
dt
(11.69)
Aufgabe 11.23 Das Potenzial sei V (r) = κ r 2 /2, bewirke also eine lineare, rücktriebende Kraft. Welche
Lösung ergibt sich dann aus den Anfangsbedingungen (11.66)? Auch hier l ässt sie sich wieder bestimmen,
wenn man zuerst die unveränderte Bewegungsgleichung für den Drehimpuls pϕ = m r 2 ϕ̇ löst.
Aufgabe 11.24 Es sei V (r) irgendeine monoton wachsende Funktion, so dass das Minimum des Potenzials auf der z-Achse liegt. Man zeige, dass in diesem Fall jede Bewegung, unabh ängig von den Anfangsbedingungen, früher oder später in der Nähe der z-Achse endet. Es gilt also r(t) → 0 für t → ∞.
Aufgabe 11.25 Man führe wieder die analogen Überlegungen in Kugelkoordinaten durch, wobei das Potenzial in diesem Fall kugelsymmetrisch sein soll. Man zeige entsprechend, dass bei einem monoton ansteigenden Potenzial V (r) das Teilchen stets in der Nähe des Ursprungs endet, also auch hier r(t) → 0
für t → ∞ gilt.
Die Lorentz-Kraft
Mit der Mischform (11.67) haben wir die allgemeinste Darstellung für die Bewegungsgleichungen eines mechanischen Systems in einem beliebigen krummlinigen Koordinatensystem angegeben. Wir wollen
jetzt noch der Frage nachgehen, was das allgemeinste Kraftgesetz ist, das sich allein aus einer LagrangeFunktion ableiten lässt. Bisher hatten wir argumentiert, dass es dazu ein Potenzial V geben muss, also eine
Funktion des Ortes q ∈ Q, deren Gradient die Kraft ist.
Eine genauere Betrachtung zeigt jedoch, dass sich eine viel größere Klasse von Kräfte durch eine
Lagrange-Funktion beschreiben lässt. Interessanterweise sind es genau diejenigen Kräfte, die wir als elektromagnetische Kräfte kennen. Das ist ein sehr bemerkenswerter Umstand, denn es zeigt, dass es offenbar
einen Zusammenhang zwischen der Lagrangeschen Formulierung der Mechanik und anderen, fundamentalen physikalischen Theorien gibt.
59
Um herauszufinden, welche Arten von Kräften sich prinzipiell aus einer Lagrange-Funktion ableiten
lassen, betrachten wir irgendeine Funktion L, die ein Polynom vom Grad 2 in den Geschwindigkeiten ist,
aber ansonsten beliebig vom Ort und der Zeit abhängt. Das ist natürlich noch längst nicht die allgemeinste mögliche Lagrange-Funktion. Da aber für mechanische Systeme die kinetische Energie immer eine
quadratische Funktion der Geschwindigkeit ist, treten nur solche Lagrange-Funktionen für physikalisch
realistische Systeme auf.
Wir sind außerdem bescheiden und betrachten nur ein einzelnes Teilchen, also einen dreidimensionalen Konfigurationsraum, dessen Koordinaten wir mit ri bezeichnen. Dies seien die üblichen kartesischen
Koordinaten im Euklidischen Raum, so dass wir alle Indizes nach unten schreiben können. Die LagrangeFunktion lautet dann
1
(11.70)
L = Mij (r, t) ṙi ṙj + Ai (r, t) ṙi − φ(r, t),
2
wobei Mij ein beliebiges symmetrisches Tensorfeld zweiter Stufe ist, Ai ein beliebiges Vektorfeld, und
φ ein beliebiges skalares Feld, jeweils auf dem dreidimensionalen Euklidischen Raum. Alle drei Felder
können zudem von der Zeit abhängen. Das ist offenbar die allgemeinste Funktion L mit den verlangen
Eigenschaften. Der spezielle Fall eines gewöhnlichen Teilchens der Masse m in einem Potenzial V (r, t)
ist darin enthalten. In diesem Fall müssen wir nur Mij (r, t) = m δij , Ai (r, t) = 0 und φ(r, t) = V (r, t)
setzen.
Wie lauten nun die Bewegungsgleichungen, die sich aus (11.70) ergeben? Wir müssen dazu nur die
Gleichung (11.51) auswerten. Zunächst ist
∂L
= Mkj (r, t) ṙj + Ak (r, t).
∂ ṙk
(11.71)
Diese Größe müssen wir nach der Zeit ableiten, wobei wir jetzt beachten müssen, dass wir zuerst für r
eine Bahn r(t) einsetzen müssen, und dass wir zusätzlich die explizite Zeitabhängigkeit der Felder M ij
und Ai berücksichtigen müssen. Es genügt, den Ausdruck wie folgt teilweise mit Hilfe der Kettenregel
auszuwerten,
d
d ∂L
Mkj (r, t) ṙj + ∂i Ak (r, t) ṙi + ∂t Ak (r, t).
(11.72)
=
dt ∂ ṙk
dt
Als Abkürzungen haben wir hier ∂t für die partielle Ableitung ∂/∂t nach der Zeit verwendet, und wie
üblich ist ∂i die Ableitung ∂/∂ri nach den räumlichen Koordinaten.
Jetzt müssen wir noch den zweiten Term in der Bewegungsgleichung ausrechnen. Das ergibt
∂L
1
= ∂k Mij (r, t) ṙi ṙj + ∂k Ai (r, t) ṙi − ∂k φ(r, t).
∂rk
2
(11.73)
Wenn wir die Terme dann noch ein wenig ordnen, bekommen wir die Lagrange-Gleichung
1
d
Mkj ṙj − ∂k Mij ṙi ṙj = ∂k Ai − ∂i Ak ṙi − ∂k φ + ∂t Ak .
dt
2
(11.74)
Diese Gleichung können wir wie folgt interpretieren. Auf der linken Seite steht die Zeitableitung des Impulses. Allerdings hängt der Impuls jetzt nicht mehr einfach nur linear mit der Geschwindigkeit zusammen,
sondern über eine orts- und zeitabhängige Massenmatrix Mij .
Das ist etwas ungewöhnlich, aber zumindest im Prinzip können wir uns ja durchaus vorstellen, dass
die Trägheit eines Teilchens keine feste Eigenschaft des Teilchen ist, sondern von Ort, Zeit und sogar der
Bewegungsrichtung im Raum abhängt. Genau dies wird durch die orts- und zeitabhängige Massenmatrix
Mij ausgedrückt, also durch den quadratischen Teil der Lagrange-Funktion. Der zusätzliche Term auf der
linken Seite ist derselbe, der sich auch in einem krummlinigen Koordinatensystem ergibt, wenn dort die
Massenmatrix ortsabhängig ist.
60
Da die Kraft auf der rechten Seite der interessantere Aspekt der Bewegungsgleichung ist, setzen wir von
nun an Mij = m δij , betrachten also ein “gewöhnliches” Teilchen mit der Masse m. Auf der linken Seite
der Bewegungsgleichung (11.74) steht dann m r̈k , also Masse mal Beschleunigung. Die Kraft Fk auf der
rechten Seite hängt aber immer noch vom Ort, der Geschwindigkeit und von der Zeit ab. Es ist also nicht
einfach eine Potenzialkraft. Eine kurze Rechnung zeigt, dass wir diese speziele Form einer Kraft bereits
kennen. Definieren wir nämlich zwei neue Vektorfelder,
Bi = εijk ∂j Ak
und Ei = ∂i φ + ∂t Ai ,
(11.75)
dann gilt für die Kraft auf der rechten Seite von (11.74)
Fk = εkij ṙi Bj + Ek
oder
F = ṙ × B + E.
(11.76)
Das ist die elektromagnetische Lorentz-Kraft. Nur die Ladungen und, je nach Wahl des Einheitensystems,
die Lichtgeschwindigkeit fehlt in dieser Darstellung. Das lässt sich aber leicht beheben. Hat das Teilchen
eine Masse m und eine Ladung q, und verwenden wir das Gaußsche Maßsystem, so müssen wir die
Lagrange-Funktion
1
q
L = m ṙ · ṙ + A(r, t) · ṙ − q φ(r, t)
(11.77)
2
c
verwenden, um die Bewegungsgleichung mit den richtigen Konstanten zu bekommen, nämlich
m r̈ =
q
ṙ × B + q E,
c
mit B = ∇ × A,
E = −∇φ −
1
∂t A.
c
(11.78)
Bemerkenswert an diesem Ergebnis ist nicht nur, dass die Lorentz-Kraft offenbar die allgemeinste Form
einer Kraft ist, die sich für ein einzelnes Teilchen aus einer Lagrange-Funktion ableiten lässt. Das eigentlich verblüffende ist, dass nur solche elektrische und magnetische Felder auftreten, die Lösungen der
homogenen Maxwell-Gleichungen sind, für die also gilt
∇×E+
1
∂t B = 0,
c
∇ · B = 0.
(11.79)
Denn genau diese Felder lassen sich durch ein elektrisches Potenzial φ und ein magnetisches Vektorpotenzial A wie in (11.78) darstellen.
Es lassen sich also nicht nur Potenzialkräfte aus einer Lagrange-Funktion ableiten, sondern auch geschwindigkeitsabhängige Kräfte, wenn sie die Form der Lorentz-Kraft haben. Dass dem so ist, können
wir an dieser Stelle nur feststellen. Dass es sich dabei um eine sehr tiefsinnige Erkenntnis handelt, wird
erst sehr viel später klar werden, wenn wir nämlich zeigen, dass sich auch die Bewegungsgleichungen des
elektromagnetischen Feldes, also die Maxwell-Gleichungen aus einer Lagrange-Funktion ableiten lassen.
Dann wird sich diese Eigenschaft der Lorentz-Kraft nämlich als eine Konsistenzbedingung ergeben, und
es werden dabei auch die inhomogenen Maxwell-Gleichungen eine Rolle spielen. Aber das geht natürlich
zu weit über die klassische Mechanik hinaus, als das wir es an dieser Stelle wirklich verstehen können.
Wir werden uns im folgenden auf rein mechanische Systeme beschränken, und im nächsten Kapitel den
Umgang mit Lagrange-Funktion ausführlich üben.
Aufgabe 11.26 Aus der elementaren Elektrodynamik ist bekannt, dass sich die Felder E und B nicht
ändern, wenn wir die Potenziale φ und A wie folgt eichtransformieren,
φ0 = φ −
1
∂t Λ,
c
A0 = A + ∇Λ,
61
(11.80)
wobei Λ irgendeine Funktion von Ort und Zeit ist. Das ergibt sich auch durch Einsetzen unmittelbar aus
(11.78). Die Lagrangefunktion L ändert sich jedoch, wenn wir diese Transformation durchführen. Man
zeige, dass die transformierte Funktion durch
L0 = L +
q dΛ
c dt
(11.81)
gegeben ist. Die Zeitableitung d/dt ist wie üblich so zu verstehen ist, dass wir die Funktion Λ erst entlang
einer Bahn auswerten, und das Ergebnis dann als Funktion von Ort und Geschwindigkeit darstellen.
Aufgabe 11.27 Man beweise folgenden allgemeinen Satz. Es sei L irgendeine Lagrange-Funktion auf einem Konfigurationsraum Q, die nicht einmal quadratisch in den Geschwindigkeiten sein muss. Sie wird in
einem beliebigen Koordinatensystem dargestellt als Funktion der Ortskoordinaten q α , der Geschwindigkeiten q̇ α und der Zeit t. Eine zweite Lagrange-Funktion L0 sei definiert durch
L0 = L +
dΛ
∂Λ
∂Λ
= L + α q̇ α +
,
dt
∂q
∂t
(11.82)
wobei Λ irgendeine Funktion der Orte q α und der Zeit t ist. Dann ergeben sich aus L und L0 dieselben
Bewegungsgleichungen (11.51). Verschiedene Lagrange-Funktionen L und L 0 führen also auf die gleichen
Bewegungsgleichungen, wenn sie sich nur um die totale Zeitableitung einer Funktion Λ unterscheiden.
62
12 Einfache mechanische Systeme
Eine besondere Stärke der d’Alembertschen oder Lagrangeschen Formulierung der Bewegungsgleichungen für mechanische Systeme liegt darin, dass sich Systeme mit Zwangsbedingungen besonders elegant
und einfach beschreiben lassen. Einige spezielle solche Systeme hatten wir schon in Kapitel 5 diskutiert,
dort jedoch mit den manchmal etwas schwerfälligen Newtonschen Methoden.
Aufbauend auf den allgemeinen Überlegungen aus dem letzten Kapitel werden wir hier zunächst eine
Art Rezept für die Beschreibung von allgemeinen mechanischen Systemen entwickeln. Es besteht aus ein
paar einfachen Grundregeln, nach denen wir im Prinzip für jedes mechanische System in wenigen Schritten die Bewegungsgleichungen herleiten können. Um die Effizienz dieses Verfahrens zu demonstrieren,
werden wir es anschließend auf eine Reihe von typischen mechanischen Systemen mit Zwangsbedingungen anwenden.
Bei den meisten derartigen Systemen geht es im wesentlichen darum, die richtige Lagrange-Funktion
zu bestimmen. Nach ein wenig Übung ist dies oft nur noch ein Ein- oder Zwei-Zeilen-Rechnung. Man
entwickelt schließlich eine gewisse Intuition dafür, wie die Lagrange-Funktion für ein gegebenes System
aussehen muss, wenn dieses bestimmte physikalische Eigenschaften hat. Später werden wir solche Eigenschaften noch etwas systematischer untersuchen. Dieses Kapitel soll hauptsächlich als Beispielsammlung
dienen, auf die wir dann hin und wieder zurückgreifen können.
Holonome Zwangbedingungen
Wir wollen zunächst kurz wiederholen, was wir unter einer Zwangsbedingung und einer Zwangskraft
verstehen. Auch dies lässt sich mit dem Konzept des Konfigurationsraumes besonders elegant darstellen.
Eine Zwangsbedingung ist eine Einschränkung der physikalisch möglichen Konfigurationen eines mechanischen Systems. Ein typisches Beispiel dafür ist ein Pendel, bei dem sich ein Teilchen nur auf einer
Kugeloberfläche mit einem vorgegebenen Radius bewegen kann. Eine solche Bedingung wird durch eine Gleichung C(q, t) = 0 auf dem Konfigurationsraum dargestellt. Sie kann auch explizit von der Zeit
abhängen. So können wir zum Beispiel bei einem Pendel die Länge ` der Pendelschnur “von außen” in einer vorgegebenen Art und Weise als Funktion der Zeit ändern. In diesem Fall würde die Zwangsbedingung
lauten
C(q, t) = x2 + y 2 + z 2 − `(t)2 = r 2 − `(t)2 = 0.
(12.1)
Hier haben wir dieselbe Funktion C(q, t) auf dem Konfigurationsraum einmal in kartesischen Koordinaten
(x, y, z) und einmal in Kugelkoordinaten (r, ϑ, ϕ) dargestellt.
Die Funktion `(t) ist in diesem Fall fest vorgegeben. Wir legen die Länge der Pendelschnur unabhängig
davon fest, welche Bewegungen das Pendel ausführt. Sonst würde es sich nicht um eine Zwangsbedingung
handeln, sondern es läge eine Wechselwirkung zwischen dem Pendel und der äußeren Instanz vor, die
die Länge einstellt. Zwangsbedingungen sind immer unabhängig davon, welche Bewegungen ein System
tatsächlich ausführt.
Wir bezeichnen eine solche Einschränkung der Bewegungsfreiheit eines mechanischen Systems als eine
holonome Zwangsbedingung, was soviel wie “ganzheitliche” Zwangsbedingung bedeutet. Es gibt noch
andere Arten von Zwangsbedingungen, auf die wir später eingehen werden.
Eine holonome Zwangsbedingung wird durch eine skalare Funktion auf dem Konfigurationsraum eines mechanischen System definiert, die für alle physikalische m öglichen Konfigurationen verschwindet.
Ein System kann natürlich mehreren solcher Zwangsbedingungen unterliegen. Im allgemeinen haben wir
einen Satz von K ≥ 1 Zwangsbedingungen, die wir durch die Gleichungen
C k (q, t) = 0,
mit k ∈ {1, . . . , K},
63
(12.2)
darstellen können. Die Systeme, die wir in Kapitel 5 studiert haben, zum Beispiel das Schienenfahrzeug,
das Pendel oder die Hantel, waren alle von dieser Form. Dort waren die Zwangsbedingungen sogar immer
unabhängig von der Zeit. Man kann sich aber leicht Verallgemeinerungen mit zeitabhängigen Zwangsbedingungen vorstellen, wie etwa das Pendel mit veränderlicher Länge.
In einem mechanischen System mit Zwangsbedingungen treten Zwangskräfte auf, die dafür sorgen,
dass die gestellten Bedingungen auch tatsächlich erfüllt werden. Früher hatten wir argumentiert, dass diese
Kräfte stets senkrecht zu den möglichen Bewegungsrichtungen wirken müssen, da sie sonst das System
quasi “von selbst” in Bewegung setzen könnten. Die Begründung beruhte jedoch eher auf einer gewissen
physikalischer Intuition als auf einem mathematischen Beweis.
Einen solchen Beweis kann es natürlich auch nicht geben. Denn letztlich handelt es sich um einen speziellen Aspekt einer physikalischen Theorie. Es ist eine Beobachtung, dass Zwangsbedingungen nicht dazu
führen, dass sich ein Pendel von selbst in Bewegung setzt, oder dass ein Schienenfahrzeug nur aufgrund
der Tatsache, dass es ein solches ist, von selbst bergauf fährt. Wir können diese spezielle Eigenschaft von
Zwangskräften nicht beweisen. Aber wir können sie nun ein wenig besser begründen.
Wir schreiben zunächst die d’Alembertschen Bewegungsgleichungen auf, wie sie für jedes mechanische
System gelten. Wir verwenden dazu beliebige, verallgemeinerte Koordinaten q µ auf dem Konfigurationsraum. Allerdings spalten wir die Kräfte jetzt in Zwangskräfte Zµ und dynamische Kräfte Fµ auf, also
d ∂T
∂T
= Fµ + Zµ .
µ −
dt ∂ q̇
∂q µ
(12.3)
Unter den dynamischen Kräften Fµ verstehen wir diejenigen Kräfte, die wir als Funktionen der Orte und
Geschwindigkeiten der Teilchen explizit angeben können. Dies umfasst sowohl die Wechselwirkungen der
Teilchen untereinander als auch die möglicherweise von außen einwirkenden Kräfte. Die Zwangskräfte
Zµ sind dagegen diejenigen Kräfte, von denen wir nur wissen, was sie bewirken, aber uns nicht damit
auseinandersetzen wollen oder können, wie sie entstehen. Das Ziel ist es, diese unbekannten Kräfte aus
dem Gleichungssystem (12.3) zu eliminieren.
Betrachten wir zuerst den Fall, dass nur eine einzige Zwangsbedingung C(q, t) = 0 vorliegt. Wir können
in diesem Fall die Zwangskraft Zµ als Grenzfall einer Potenzialkraft ansehen. Wir stellen uns vor, dass ein
sehr hohes und steiles Potenzial das System daran hindert, sich von dem Unterraum des Konfigurationsraumes zu entfernen, in dem C(q, t) = 0 ist. Ein solches Potenzial ist durch
V(q, t) =
1
Λ C(q, t)2
2
(12.4)
gegeben, wobei Λ eine große Zahl sein soll. Sie muss natürlich die richtige physikalische Dimension
haben, damit V eine Energie ist. Das Potenzial bewirkt eine rücktreibende Kraft
Zµ (q, t) = −
∂V(q, t)
∂C(q, t)
= −Λ C(q, t)
.
µ
∂q
∂q µ
(12.5)
Sie zeigt in Richtung des Gradienten der Funktion C(q, t) im Konfigurationsraum. Die Zeitabhängigkeit
spielt dabei keine Rolle. Sie bewirkt nur, dass zu unterschiedlichen Zeiten am selben Ort im Konfigurationsraum unterschiedliche Kräfte wirken.
Was passiert nun, wenn wir den Grenzwert Λ → ∞ bilden? Das Potenzial wird dann unendlich hoch,
außer dort, wo C(q, t) = 0 ist. Das System, das immer nur eine endliche Energie besitzt, wird gezwungen,
sich dort aufzuhalten. Die Zwangskraft stellt sich dabei so ein, dass sie endlich bliebt, denn trotz der
Zwangsbedingung erfahren die einzelnen Teilchen ja nur endliche Beschleunigungen. Während Λ wächst,
geht der Faktor C(q, t) gegen Null, denn das System wird immer stärker gezwungen, in der Nähe des
erlaubten Unterraumes zu bleiben. Es bliebt schließlich im Grenzfall ein Ausdruck für die Zwangskraft,
dessen Betrag wir nicht kennen. Denn dieser ergibt sich aus dem Grenzwert des Produktes Λ C(q, t), und
64
der hängt von der tatsächlich realisierten Bewegung ab. Aber wir kennen die Richtung dieser Kraft. Sie
zeigt in Richtung des Gradienten der Funktion C(q, t) im Konfigurationsraum.
Aus der realistischen Annahme, dass eine Zwangskraft in Wirklichkeit eine sehr starke Potenzialkraft ist,
folgt also, dass sie stets in die Richtung des Gradienten der Zwangsbedingung zeigt. Auch hier geht wieder
die Eigenschaft ein, dass die Kraft ein dualer Vektor auf dem Konfigurationsraum ist. Denn sonst würde
eine solche Aussage keinen Sinn ergeben. Nur bei einem Ein-Teilchen-System, dessen Konfigurationsraum
mit dem dreidimensionalen Euklidischen Raum identisch ist, ist sie äquivalent zu der Aussage, dass die
Zwangskraft auf den möglichen Bewegungsrichtungen senkrecht steht, denn nur dann steht uns immer
eine Metrik zur Verfügung.
Eine wesentliche Voraussetzung bei dieser Überlegung ist, dass der Gradient ∂C/∂q µ überall dort, wo
C = 0 ist, nicht verschwindet. Das ist die Analogie zu der Eigenschaft einer gewöhnlichen reellen Funktion
von einer Variablen, eine einfache Nullstelle zu haben, also eine Nullstelle, an der nicht gleichzeitig ihre
Ableitung verschwindet. Anschaulich heißt das, dass die Funktion C in jede Richtung weg von der Nullstellenmenge linear ansteigt oder abfällt. Ohne diese Voraussetzung könnten wir die Zwangskraft nicht auf
diese Weise darstellen.
Aufgabe 12.1 Davon abgesehen haben wir bei der Formulierung der Zwangsbedingungen aber eine gewisse Freiheit. Es seien C und C˜ zwei Funktionen auf Q, die dieselbe Nullstellenmenge haben, und deren
Gradienten auf dieser Nullstellenmenge nirgendwo verschwinden. Man zeige, dass dann die Gradien˜ µ ∝
ten beider Funktion zumindest auf der Nullstellenmenge in dieselbe Richtung zeigen. Es gilt ∂ C/∂q
∂C/∂q µ überall dort, wo C = 0 und C˜ = 0 ist.
Das ganze lässt sich leicht auf ein System von mehreren Zwangsbedingungen erweitern. Wir betrachten
dann einfach ein Potenzial, das das System zwingt, alle Zwangsbedingungen zu erfüllen, zum Beispiel
V(q, t) =
1 X
Λkl C k (q, t) C l (q, t)
2 k,l
⇒
Zµ (q, t) = −
X
kl
Λkl C k (q, t)
∂C l (q, t)
.
∂q µ
(12.6)
Hier ist Λkl irgendeine symmetrische, positive K×K-Matrix, deren Einträge wir so wählen, dass alle Summanden die Dimension einer Energie haben. Das Potenzial V ist dann überall dort positiv, wo mindestens
eine Zwangsbedingung nicht Null ist, und Null genau dort, wo alle Zwangsbedingungen erfüllt sind.
Lassen wir nun die Einträge der Matrix Λkl , oder zumindest deren Eigenwerte gegen Unendlich gehen,
so wird das System wieder gezwungen, die Zwangsbedingungen zu erfüllen. Denn das Potenzial bleibt
nur dort endlich, wo alle Zwangsbedingungen erfüllt sind. Die dann wirkende Zwangskraft ist eine Linearkombination der Gradienten ∂C k /∂q µ . Wir schreiben dafür
Zµ = −
X
k
λk
∂C k
.
∂q µ
(12.7)
Die unbekannten Koeffizienten λk werden Lagrange-Multiplikatoren genannt. Sie werden erst durch die
tatsächlich realisierte Bewegung des Systems bestimmt und hängen dann natürlich auch von der Zeit ab.
Auch hier setzen wir wieder voraus, dass sich jede mögliche Zwangskraft so darstellen lässt. Das ist
genau dann der Fall, wenn die Gradienten X kµ = ∂C k /∂q µ einen Satz von K linear unabhängigen dualen Vektoren bilden, und zwar an jeder Stelle der gemeinsamen Nullstellenmenge der Funktionen C k .
Anschaulich heißt das wieder, dass in jede Richtung weg von der Nullstellenmenge mindestens eine der
Zwangsbedingungen linear ansteigt. Nun unter dieser Voraussetzung wird durch das Potenzial (12.6) in
jede Richtung eine lineare rücktriebende Kraft erzeugt.
Wenn wir das hier beschriebene Verfahren anwenden wollen, müssen wir die Zwangsbedingungen also
immer so formulieren, dass ihre Gradienten zumindest auf der Nullstellenmenge linear unabhängig sind.
65
Beim Pendel ist dies der Fall. Der Gradient Xµ = ∂C/∂q µ von (12.1) ist in kartesischen Koordinaten
Xx = 2 x, Xy = 2 y und Xz = 2 z, oder in Kugelkoordinaten Xr = 2 r, Xϑ = 0 und Xϕ = 0. Auf der
Nullstellenmenge, also für r = `, ist er nicht Null. Außerdem sehen wir, dass der Gradient tatsächlich
die Richtung der Zwangskraft angibt, die in diesem Fall in radiale Richtung wirkt, und zwar unabhängig
davon, ob die Pendellänge ` konstant ist oder zeitlich variiert.
Um die Bahn des Systems zu bestimmen, müssen wir neben den 3 N Koordinatenfunktionen q µ (t),
die die eigentliche Bahn des Systems beschreiben, nun auch die Lagrange-Multiplikatoren λ k (t) bestimmen. Das sind K zusätzliche Funktionen der Zeit. Dafür haben wir aber auch K zusätzliche Gleichungen, nämlich die Zwangsbedingungen. Tatsächlich ergibt sich aus diesen und den d’Alembertschen Bewegungsgleichungen jetzt ein System von 3 N + K unabhängigen Gleichungen für ebenso viele Funktionen.
Sie lauten
X ∂C k
∂T
d ∂T
λk µ ,
C k = 0.
(12.8)
µ −
µ = Fµ −
dt ∂ q̇
∂q
∂q
k
Wenn die dynamischen Kräfte Fµ = −∂V/∂q µ Potenzialkräfte sind, lassen sich auch diese Gleichungen
wieder besonders elegant schreiben. Wir definieren dazu eine erweiterte Lagrange-Funktion, in die auch
die Zwangsbedingungen eingehen, und zwar jeweils multipliziert mit ihren Lagrange-Multiplikatoren. Das
erklärt im übrigen auch die Bezeichnung “Multiplikator”. Wir setzen also
X
λk C k .
(12.9)
Le = T − V −
k
Auch hier ist wieder die gesamte Dynamik des Systems in einer einzigen Funktion zusammengefasst. Die
Bewegungsgleichungen (12.8) lauten nämlich nun
d ∂ Le
∂ Le
−
= 0,
dt ∂ q̇ µ ∂q µ
∂ Le
= 0.
∂λk
(12.10)
Zusätzlich zu den bereits bekannten Langrangeschen Bewegungsgleichungen müssen die partiellen Ableitungen von Le nach den Multiplikatoren verschwinden. Auf diese Weise werden dem System die Zwangsbedingungen auferlegt.
Um eines der Standardbeispiele aus Kapitel 5 zu reproduzieren, betrachten wir das Pendel im Schwerefeld. Die Pendellänge ` soll jetzt konstant sein. Die dynamischen Kräfte sind in diesem Fall Potenzialkräfte.
Zunächst verwenden wir kartesische Koordinaten (x, y, z). Dann ist die erweiterte Lagrange-Funktion
durch
m 2
Le = T − V − λ C =
ẋ + ẏ 2 + ż 2 − m g z − λ x2 + y 2 + z 2 − `2
(12.11)
2
gegeben. Die Bewegungsgleichungen (12.10) lauten demnach
d
m ẋ + 2 λ x = 0,
dt
d
m ẏ + 2 λ y = 0,
dt
d
m ż + 2 λ z + m g = 0,
dt
(12.12)
e
und natürlich ist die Zwangsbedingung ∂ L/∂λ
= x2 + y 2 + z 2 − `2 = 0 zu erfüllen. Wir müssen also
ein System von vier Gleichungen für die vier Funktionen x(t), y(t), z(t) und λ(t) lösen. Auf diese Weise
hatten wir die Bewegungen des Pendels in Kapitel 5 studiert.
Etwas einfacher geht es, wenn wir von Anfang an Kugelkoordinaten verwenden. In diesem Fall ist die
kinetische Energie durch den Ausdruck (11.52) gegeben, und für die erweitere Lagrange-Funktion ergibt
sich
m 2
ṙ + r 2 ϑ̇2 + r 2 sin2 ϑ ϕ̇2 + m g r cos ϑ − λ (r 2 − `2 ).
(12.13)
Le = T − V − λ C =
2
66
Analog zu (11.54) finden wir jetzt die Bewegungsgleichungen
d ∂ Le
−
dt ∂ ṙ
d ∂ Le
−
dt ∂ ϑ̇
d ∂ Le
−
dt ∂ ϕ̇
∂ Le
d
m ṙ − m r ϑ̇2 − m r sin2 ϑ ϕ̇2 − m g cos ϑ + 2 r λ = 0,
=
∂r
dt
∂ Le
d
m r 2 ϑ̇ − m r 2 sin ϑ cos ϑ ϕ̇2 + m g r sin ϑ = 0,
=
∂ϑ
dt
∂ Le
d
m r 2 sin2 ϑ ϕ̇ = 0.
=
∂ϕ
dt
(12.14)
Auf den ersten Blick sieht das sehr viel komplizierter aus als (12.12). Betrachten wir aber die einzelnen
Gleichungen, so stellen wir fest, dass die Hilfsfunktion λ nur noch in der ersten Gleichung auftritt. Zudem
können wir in alle drei Gleichungen unmittelbar die Lösung der vierten Gleichung, also der Zwangse
bedingung ∂ L/∂λ
= r 2 − `2 = 0 einsetzen. Mit r(t) = ` lauten die Bewegungsgleichungen für die
Winkelkoordinaten, wenn wir noch die Ableitungen d/dt ausführen,
ϑ̈ − sin ϑ cos ϑ ϕ̇2 = −
g
sin ϑ,
`
ϕ̈ + 2 cot ϑ ϑ̇ ϕ̇ = 0.
(12.15)
Das sind die Pendelgleichungen (5.45). Wir bekommen also dasselbe Ergebnis wie in Kapitel 5, nachdem
wir dort die Zwangskräfte aus den Bewegungsgleichungen eliminiert hatten. Die zusätzliche Bewegungsgleichung für die Koordinate r, also die erste Gleichung in (12.14), ist eigentlich keine Bewegungsgleichung. Sie liefert nur die Hilfsgröße λ als Funktion der anderen Koordinaten und deren Zeitableitungen.
Sie ist nur dann von Interesse, wenn wir explizit wissen wollen, wie stark die Zwangskraft ist, die auf das
Pendel wirkt. Ihre einzige nicht verschwindende Komponente ist
Zr = −λ
∂C
= −2 r λ = −m `2 ϑ̇2 + sin2 ϑ ϕ̇2 − m g cos ϑ.
∂r
(12.16)
Auch diese Kraft hatten wir in Kapitel 5 bereits ausgerechnet. Sie setzt sich zusammen aus der nach innen
gerichteten Zentripetalkraft, die zum Quadrat der Geschwindigkeit proportional ist, und der Komponente
der Gravitationskraft in Richtung der Pendelstange, die durch die Zwangskraft ausgeglichen werden muss.
Aufgabe 12.2 Man führe die gleichen Überlegungen für die Hantel aus Abbildung 5.3(b) durch. Was sind
hier die geeigneten verallgemeinerten Koordinaten auf dem sechsdimensionalen Konfigurationsraum?
Aufgabe 12.3 Was passiert, wenn wir in (12.11) die Zwangsbedingung C = x 2 + y 2 + z 2 − `2 durch
C = (x2 + y 2 + z 2 − `2 )2 ersetzen? Sie hat offenbar die gleiche Nullstellenmenge, beschreibt also die
gleiche physikalische Einschränkung der möglichen Konfigurationen. Warum ergeben sich trotzdem nicht
die richtigen Bewegungsgleichungen?
Der reduzierte Konfigurationsraum
Holonome Zwangsbedingungen lassen sich im Prinzip immer auf die gerade gezeigte Art und Weise
auflösen. Durch geschickte Wahl der Koordinaten kann die Zahl der zu lösenden Bewegungsgleichungen
reduziert werden, wobei die Multiplikatoren in diesen Gleichungen gar nicht mehr vorkommen.
Die Idee ist kurz gefasst die folgende. Da wir ohnehin schon wissen, dass sich das System nur eingeschränkt bewegen kann, sollte es möglich sein, dies bereits beim Aufstellen der Bewegungsgleichungen zu
berücksichtigen. Wir sollten von Anfang an überhaupt nur solche Bahnen zulassen, die auch realisierbar
sind, anstatt erst alle Bahnen im Konfigurationsraum zu betrachten, um aus dieser, eigentlich viel zu großen
Menge dann mit Hilfe der Bewegungsgleichungen die tatsächlich realisierten Bahnen herauszusuchen.
67
q3
e
Q
q2
ζ
Fµ
Q
C=0
Fµ + Z µ
q µ (t)
Fα
q1
Zµ
χα (t)
χ2
χ1
(b)
(a)
Abbildung 12.1: Durch eine zeitunabhängige Zwangsbedingungen C = 0 wird ein Unterraum Q des ere definiert, der alle physikalische möglichen Konfigurationen enthält (a).
weiterten Konfigurationsraumes Q
Wirken auf das System dynamische Kräfte F µ , so stellen sich die Zwangskräfte Z µ so ein, dass das System
in Q verbleibt. Um die Bewegungsgleichungen aufzustellen, genügt es, nur solche Bahnen zu betrachten,
die ganz in Q liegen. Dazu führt man ein reduziertes Koordinatensystem {χ α } auf Q ein (b). Man muss
dann nur noch die Komponenten Fα der dynamischen Kräfte kennen, um die Bewegungsgleichungen zu
formulieren
In Abbildung 12.1(a) ist der Konfigurationsraum eines mechanischen Systems dargestellt, versehen mit
e und nennen ihn den erweiterten Konfigueinem Koordinatensystem {q µ }. Wir bezeichnen ihn hier mit Q
rationsraum, da er mehr Konfigurationen enthält als tatsächlich realisiert werden können. Die Zwangsbedingungen definieren zu jedem Zeitpunkt t einen Unterraum
e
Qt = { q ∈ Q,
C k (q, t) = 0 }.
(12.17)
Dieser Unterraum enthält alle zur Zeit t realisierbaren Konfigurationen. Wir nennen ihn den physikalischen
oder reduzierten Konfigurationsraum. In der Abbildung 12.1(a) ist der einfache Fall darstellt, dass die
Zwangsbedingungen zeitunabhängig sind. Dann hängt Q t = Q nicht von der Zeit ab, und jede möglich
Bahn des Systems liegt ganz in Q.
Handelt es sich um ein System von N Teilchen und liegen K Zwangsbedingungen vor, so hat der
reduzierte Konfigurationsraum die Dimension 3 N − K. Das System hat in Wirklichkeit nur 3 N − K
Freiheitsgrade. Es kann sich von jedem Punkt des reduzierten Konfigurationsraumes nur in 3 N − K
Richtungen bewegen, weil die restlichen K Richtungen durch die Zwangsbedingungen eingeschränkt sind.
Wirkt auf das System eine Kraft in irgendeine Richtung, so stellt sich die Zwangskraft immer so ein, dass
das System innerhalb von Qt verbleibt.
Das ist die anschauliche Beschreibung dessen, was den d’Alembertschen oder Langrangeschen Bewegungsgleichungen (12.8) bzw. (12.10) zu Grunde liegt. Da diese Gleichungen ein gekoppeltes System von
Differenzialgleichungen für die Koordinaten q µ (t) und die Lagrange-Multiplikatoren λk (t) bilden, löst
man auf diese Weise quasi in einem Schritt sowohl die Zwangsbedingungen als auch die eigentlichen
Bewegungsgleichungen, und man bekommt zudem noch die Zwangskräfte geliefert.
Eine Alternative besteht nun darin, Schritt für Schritt vorzugehen. Man löst zuerst die Zwangsbedingungen, anschließend die Bewegungsgleichungen, und zuletzt verschafft man sich Informationen über die
auftretenden Zwangskräfte, wenn dies erforderlich ist. In den meisten praktischen Fällen, und insbesondere dann, wenn die genaue Kenntnis der Zwangskräfte nicht erforderlich ist, ist dieses Vorgehen sehr viel
effizienter.
68
Der Trick besteht im wesentlichen darin, ein an die Zwangsbedingungen angepasstes Koordinatensystem zu verwenden. Entscheidend ist dabei, dass die vorangegangenen Überlegungen für beliebige, also
insbesondere für krummlinige und zeitabhängige Koordinatensysteme gelten. Sobald wir ein speziell angepasstes Koordinatensystem definiert haben, zerfallen die d’Alembertschen oder Lagrangeschen Gleichungen ganz von selbst in drei unabhängige Gleichungssysteme. Das erste besteht aus den Zwangsbedingungen, die dann trivial sind. Das zweite Gleichungssystem enthält die eigentlichen Bewegungsgleichungen.
Und aus dem dritten Gleichungssystem ergeben sich die Zwangskräfte.
Die Konstruktion des angepassten Koordinatensystems ist in Abbildung 12.1(b) skizziert. Sie erfolgt
analog zu den Kugelkoordinaten für das Pendel. Der erste Schritt besteht darin, ein Koordinatensystem
{χα } auf dem physikalischen Konfigurationsraum Qt einzuführen. Der Index α läuft dabei von 1 bis
3 N − K, oder nimmt Werte aus irgendeiner Indexmenge mit 3 N − K Elementen an. Beim Pendel sind
dies die Winkelkoordinaten (ϑ, ϕ), mit denen wir jeden Punkt auf der Kugeloberfläche identifizieren, also
jede physikalisch mögliche Konfiguration des Pendels erfassen können.
Wir finden solche Koordinaten, indem wir die Zwangsbedingungen “auflösen”. Die Zwangsbedingungen C k ({q µ }, t) = 0 sind K Gleichungen für 3 N Unbekannte, nämlich die ursprünglichen Koordinaten q µ
auf Q. Wenn wir annehmen, dass die Gleichungen genügend regulär sind, dann lässt sich die Lösungsmenge zu jeder Zeit t durch 3 N − K Parameter darstellen. Diese Parameter bezeichnen wir mit χ α , und wir
betrachten sie als Koordinaten auf dem physikalischen Konfigurationsraum Q t . Jede tatsächlich realisierbare Konfiguration wird dann durch die Angabe ihrer Koordinaten χ α identifiziert, und folglich können
wir jede realisierbare Bahn durch die Koordinatenfunktion χα (t) vollständig beschreiben.
Da es sich im allgemeinen um krummlinige Koordinaten handelt, wird es jedoch nicht immer möglich
sein, ein Koordinatensystem zu finden, das den ganzen physikalischen Konfigurationsraum abdeckt und
jedem Punkt eindeutig einen Satz von Koordinaten zuordnet. Die für das Pendel verwendeten Kugelkoordinaten sind zum Beispiel an den Polen, also den beiden Gleichgewichtslagen des Pendels nicht wohldefiniert. Es genügt aber für die folgenden Überlegungen, dass zumindest ein Teil von Q durch ein solches
Koordinatensystem abgedeckt wird. Wir beschränken uns dann zunächst auf Bewegungen, die in dieser
Teilmenge stattfinden. Im nächsten Kapitel werden wir uns ein wenig ausführlicher mit diesem Problem
beschäftigen und zeigen, wir man es umgehen kann.
In Abbildung 12.1(b) sind die Koordinatenlinien von χα auf dem Unterraum Q = Qt eingezeichnet.
e ergänzen. Wir fügen noch K zusätzliche
Wir können sie wie folgt zu einem Koordinatensystem von Q
l
Koordinaten ζ hinzu, so dass der reduzierte Konfigurationsraum Qt die Koordinatenfläche ζ l = 0 ist.
Die Koordinatenlinien der zusätzlichen Koordinaten ζ l zeigen also aus dem physikalischen Unterraum
hinaus, in die K verbleibenden Richtungen. Zumindest in einer gewissen Umgebung von Q t bekommen
e wobei der Index α insgesamt
wir auf diese Weise ein vollständiges Koordinatensystem ({χα }, {ζ l }) auf Q,
3 N − K Werte annimmt, und der Index l über K Werte läuft.
In diesem Koordinatensystem haben die Zwangsbedingungen C k eine sehr einfache Darstellung. Wenn
wir sie in der Nähe des reduzierten Konfigurationsraumes in eine Taylor-Reihe in den Koordinaten ζ l
entwickeln, dann fallen die konstanten Glieder weg, denn die Zwangsbedingungen C k sind ja genau dort
gleich Null, wo auch die Koordinaten ζ l Null sind. Es gilt also
C k = X kl ζ l + O(ζ l )2
mit X kl =
∂C k .
∂ζ l ζ l =0
(12.18)
Die Koeffizienten X kl bilden eine K×K-Matrix, deren Einträge im allgemeinen noch von den Koordinaten
χα und der Zeit abhängen. Es handelt sich also um Funktionen auf dem reduzierten Konfigurationsraum
Qt .
Die Matrix X kl ist sogar überall auf Qt invertierbar. Das folgt aus der Voraussetzung, dass die Gradienten der Zwangsbedingungen linear unabhängig sind. Die Einträge der Matrix X kl sind die einzigen
nicht verschwindenden Komponenten dieser Gradienten in dem angepassten Koordinatensystem, denn die
69
übrigen Komponenten X kα = ∂C k /∂χα sind überall auf Qt gleich Null, weil dort die Zwangsbedingungen verschwinden, also insbesondere konstant sind. Die Einträge der K×K-Matrix X kl bilden daher ein
System von K linear unabhängigen Vektoren, also eine invertierbare Matrix.
Beim Pendel können wir als eine zusätzliche Koordinate mit den verlangen Eigenschaften zum Beispiel
ζ = r − ` wählen. Die Zwangsbedingung lautet dann C = r 2 − `2 = ζ (2 ` + ζ) = X ζ + O(ζ 2 ), und
offenbar ist sie genau dann gleich Null, wenn ζ = 0 ist. Außerdem ist sie von der Form (12.18), wobei die
1×1-Matrix X = 2 ` in diesem Fall konstant, und natürlich auch invertierbar ist.
Nachdem wir ein solches angepasstes Koordinatensystem eingeführt haben, ergibt sich alles andere
fast von selbst. Wir müssen jetzt nur noch die d’Alembertschen Bewegungsgleichungen aufschreiben. Da
wir nun zwei Sätze von Koordinaten {χα } und {ζ l } haben, zerfallen auch die Bewegungsgleichungen
entsprechend. Betrachten wir zunächst die für die Koordinaten ζ l . Für sie ergibt sich
X ∂C k
X
∂T
d ∂T
−
=
F
−
λ
=
F
−
λk X kl .
l
k
l
l
l
dt ∂ ζ̇ l
∂ζ
∂ζ
k
k
(12.19)
Hier haben wir benutzt, dass wir nur solche Bahnen q(t) betrachten müssen, die zu jedem Zeitpunkt t
in Qt liegen. Wir können also, nachdem wir die Bewegungsgleichungen aufgestellt haben, überall ζ l =
0 und natürlich auch ζ̇ l = 0 setzen. Auf der rechten Seite bedeutet das, dass wir die Gradienten der
Zwangsbedingungen durch die oben definierte Matrix X kl ausdrücken können.
Da diese Matrix wissen wir, dass sie invertierbar ist. Folglich lassen sich diese Gleichungen immer nach
λk auflösen. Es handelt sich nicht um Bewegungsgleichungen im eigentlichen Sinne. Diese Gleichungen
bestimmen die Lagrange-Multiplikatoren und damit die Zwangskräfte. Man sieht auch sofort, dass jede
zusätzliche dynamische Kraftkomponente Fl in eine “verbotene” Richtung, also in Richtung einer Koordinaten ζ l , automatisch eine entsprechende zusätzliche, entgegengesetzt ausgerichtete Zwangskraft bewirkt.
Die eigentlichen Bewegungsgleichungen sind die für die Koordinaten χ α . Sie lauten
X ∂C k
∂T
d ∂T
−
= Fα −
λk
= Fα .
dt ∂ χ̇α ∂χα
∂χα
k
(12.20)
Auch hier können wir ζ l = 0 und ζ̇ l = 0 setzen, nachdem wir die Gleichungen aufgestellt haben, denn
es kommen ja nur solche Bahnen in betracht. Die Zwangsbedingungen fallen dann ganz weg, denn ihre
Ableitungen in Richtung der Koordinaten χα verschwinden.
Das entscheidende ist nun, dass wir hier bereits ζ l = 0 und ζ̇ l = 0 setzen können, bevor wir die partiellen
Ableitungen von T auf der linken Seite berechnen. Es werden nämlich gar keine Ableitungen in Richtung
der Koordinaten ζ l oder der Geschwindigkeiten ζ̇ l gebildet. Um die eigentlichen Bewegungsgleichungen
aufzustellen, genügt es daher völlig, die Funktion T nur als Funktion der reduzierten Koordinaten χ α , der
zugehörigen Geschwindigkeiten χ̇α und der Zeit t auf dem Unterraum Qt zu kennen. Die Koordinaten ζ l
brauchen wir dazu überhaupt nicht.
Das gleiche gilt für die rechte Seite der Bewegungsgleichung (12.20). Um die Komponenten F α der
dynamischen Kraft zu berechnen, benötigen wir die zusätzlichen Koordinaten ζ l außerhalb des physikalischen Unterraumes Qt nicht. Wenn wir die Kraft ursprünglich als Funktion der affinen Koordinaten q µ
durch ihre Komponenten Fµ dargestellt haben, so ergeben sich die Komponenten Fα aus dem üblichen
Transformationsverhalten eines dualen Vektors. Das hatten wir bereits in (11.43) aufgeschrieben, oder
in der Form (11.58) für ein N -Teilchen-System. In dem hier verwendeten speziellen Koordinatensystem
ergeben sich daraus die Komponenten
∂q µ
Fl =
Fµ .
∂ζ l
∂q µ
Fµ ,
Fα =
∂χα
70
(12.21)
In die eigentlichen Bewegungsgleichungen (12.20) gehen nur die Komponenten F α ein.Es genügt deshalb,
die ursprünglichen Koordinaten q µ als Funktion der reduzierten Koordinaten χα zu kennen. Wir müssen
nur eine explizite Darstellung der Lösungen der Zwangsbedingung kennen. Nur, wenn wir die Zwangskräfte berechnen wollen, benötigen wir zur Berechnung von F l die zusätzlichen Koordinaten ζ l .
Besonders einfach ist die Situation wieder dann, wenn alle Kräfte Potenzialkräfte sind. In diesem Fall
gilt statt (12.21) einfach Fα = −∂V/∂χα und Fl = −∂V/∂ζ l . Wir müssen dazu nur das Potenzial als
Funktion der angepassten Koordinaten {χα } und {ζ l } darstellen. Und auch hier gilt, dass wir für die
eigentlichen Bewegungsgleichungen die Funktion V nur auf Q t , also für ζ l = 0 kennen müssen. Denn zur
Berechnung der Komponenten Fα müssen wir nur die Ableitungen des Potenzials nach den Koordinaten
χα bilden.
In jedem Fall können wir die Bewegungsgleichungen wieder in der gemischten Form (11.67) aufschreiben, die alle möglichen Fälle von konservativen und nicht konservativen Kräften umfasst. Auch
die Lagrange-Funktion L = T − V müssen wir dazu nur auf Qt kennen, das heißt als Funktion der
reduzierten Koordinaten χα , der Geschwindigkeiten χ̇α und der Zeit t. Zusätzlich müssen wir dann nur
noch diejenigen Kräfte, die sich nicht aus dem Potenzial V ableiten, gemäß (12.21) in dem angepassten
Koordinatensystem darstellen. Formal ergeben sich wieder die gleichen Bewegungsgleichungen, nämlich
reduzierte
Bewegungsgleichung
∂L
d ∂L
= Fα .
α −
dt ∂ χ̇
∂χα
(12.22)
Unabhängig davon, welche Form der Bewegungsgleichungen wir verwenden, sind es jetzt nur noch
3 N −K Differenzialgleichungen, die wir lösen müssen. Das sind genau so viele, wie das System Freiheitsgrade besitzt. Besonders für Systeme mit sehr vielen Zwangsbedingungen bedeutet das eine erhebliche
Reduktion der Zahl der Bewegungsgleichungen.
Dass das neue Verfahren sehr effizient ist, sieht man schon an dem einfachen Beispiel des Pendels. In
diesem Fall sind die reduzierten Koordinaten die Winkelkoordinaten (ϑ, ϕ). Wir können die LagrangeFunktion unmittelbar als Funktion dieser Koordinaten und ihrer Zeitableitungen ausdrücken, indem wir in
(12.13) r = ` setzen. Das ergibt
L=T −V =
1
m `2 ϑ̇2 + sin2 ϑ ϕ̇2 − m g ` cos ϑ.
2
(12.23)
Sie hängt jetzt nur noch von den Koordinaten (ϑ, ϕ) und den Geschwindigkeiten ( ϑ̇, ϕ̇) ab.
Der prinzipielle Unterschied zu der früheren Herleitung ist, dass wir jetzt nicht mehr zuerst die kinetische und potenzielle Energie eines frei beweglichen Teilchens in Kugelkoordinaten ausrechnen müssen,
um dann eine erweiterte Lagrange-Funktion zu definieren, indem wir die Zwangsbedingung mit einem
Multiplikator addieren. Statt dessen müssen wir nur noch die Energien für tatsächlich realisierbare Orte
und Geschwindigkeiten bestimmen, also für Bahnen mit r(t) = `, die im physikalischen Konfigurationsraum Qt liegen, der in diesem Fall zeitunabhängig ist.
Aufgabe 12.4 Man zeige, dass die Lagrange-Gleichungen (12.22) f ür die Funktion (12.23) und mit Fα =
0 jetzt unmittelbar die Pendelgleichungen (12.15) liefern.
Aufgabe 12.5 Was passiert, wenn der Pendelkörper zusätzlich eine Ladung q trägt, und sich am Aufhängepunkt des Pendels eine Ladung Q befindet? Zum Gravitationspotenzial V G = m g r cos ϑ kommt dann
noch ein elektrisches Potenzial VE = Q q/r hinzu. Hat dies irgendeinen Einfluss auf die Bewegungen des
Pendels?
71
Einfache Beispiele
Wir wollen nun das gerade hergeleitete Verfahren anwenden und die Bewegungsgleichungen für ein paar
typische Systeme mit holonomen Zwangsbedingungen aufstellen. Es wird sich zeigen, dass die praktische
Anwendung im Einzelfall meist sehr viel einfacher ist als die allgemeine Herleitung.
Zunächst betrachten wir nur konservative Systeme, deren Kräfte sich aus einem zeitunabhängigen Potenzial ableiten lassen. Für solche Systeme haben wir nun ein sehr einfaches Rezept zur Herleitung der
Bewegungsgleichungen. Man führt zunächst einen Satz von reduzierten Koordinaten χ α ein, um die physikalisch möglichen Konfigurationen zu parametrisieren. Auf diese Weise definiert man implizit den reduzierten Konfigurationsraum Q. Es ist gar nicht mehr nötig, diesen zuerst mit Hilfe von Zwangsbedingune zu definieren. Es genügt, die Lösungsmenge
gen als Teilmenge eines erweiterten Konfigurationsraumes Q
dieser Zwangsbedingungen zu beschreiben, was oft wesentlich einfacher ist.
Dann muss man nur noch die kinetische Energie T und die potenzielle Energie V des Systems als
Funktion der Koordinaten χα , der Geschwindigkeiten χ̇α und der Zeit t darstellen. Daraus ergibt sich die
Lagrange-Funktion L = T − V, und aus ihr können wir unmittelbar die Bewegungsgleichungen (12.22)
ableiten. Bei einem konservativen System steht auf der rechten Seite einfach Null.
In Abbildung 12.2 sind ein paar einfache mechanische Systeme dieser Art dargestellt. In der Abbildung (a) bewegt sich ein Teilchen auf einer vorgegeben Kurve. Die Kurve soll sich in der x-z-Ebene befinden, und es soll eine konstante Gravitationskraft wirken, wie üblich in Richtung der negativen z-Achse.
Um für dieses System, das offenbar nur einen Freiheitsgrad besitzt, die Lagrange-Funktion anzugeben,
müssen wir uns noch nicht einmal Gedanken darüber machen, wie die Zwangsbedingungen genau zu formulieren sind. Es genügt, die Kurve, auf der sich das Teilchen bewegt, durch zwei Funktionen x(s) und
z(s) zu parametrisieren.
Wir können dann den Kurvenparameter s als verallgemeinerte Koordinate auf dem reduzierten, eindimensionalen Konfigurationsraum Q verwenden. Wir beschreiben die Bahn das Teilchens durch eine
Funktion s(t), und wir können dann unmittelbar die kinetische und potenzielle Energie als Funktion von
s und ṡ angeben. Es gilt nämlich
T =
1
1
m ẋ2 + ż 2 = m x0 (s)2 + z 0 (s)2 ṡ2 ,
2
2
V = m g z(s).
(12.24)
Offenbar hängt die kinetische Energie von s und ṡ ab. Wir können aber die Parametrisierung der Kurve
so wählen, dass der Term in der Klammer konstant ist. Wir müssen dazu nur den Kurvenparameter so
einrichten, dass er die Länge der Kurve misst. Dann gilt nämlich x 0 (s)2 + y 0 (s)2 = 1, und wir bekommen
L=T −V =
1
m ṡ2 − m g z(s).
2
(12.25)
Aus dieser Darstellung der Lagrange-Funktion entnehmen wir sofort, dass sich ein Teilchen auf einer
solchen Bahn, auch wenn sie beliebig gebogen ist, genau wie ein Teilchen auf einer geraden Bahn verhält,
wenn es dort das Potenzial V(s) = m g z(s) spürt. Seine Bewegungsgleichung lautet einfach m s̈ =
−m g z 0 (s). Das hatten wir für das Schienenfahrzeug in Kapitel 5 auch schon gezeigt, jedoch war die
Herleitung dort wesentlich mühsamer.
Aufgabe 12.6 Ist die Bahn wie in Abbildung 12.2(a) geformt, so pendelt das Teilchen in der Mulde hin und
her. Wie muss diese Mulde genau geformt sind, damit sich das Teilchen wie ein harmonischer Oszillator
verhält, also unabhängig von der Amplitude stets mit der gleichen Periode oszilliert?
Aufgabe 12.7 Eine äußere Instanz bewege die Bahn in Abbildung 12.2(a) periodisch nach rechts und
links, bzw. nach oben und unten. Die Bewegung werde jeweils durch eine Kosinusfunktion mit der Kreisfrequenz ω und Amplitude a beschieben. Wir sieht in diesem Fall die Lagrange-Funktion f ür das Teilchen
aus, und welche Bewegungsgleichungen ergeben sich?
72
replacements
r1
r2
s
`1
α
(a)
s2
s1
m1
`2
m2
s
β
m2
(b)
(c)
m1
(d)
Abbildung 12.2: Einfache mechanische Systeme, deren Lagrange-Funktionen sich leicht angeben lassen.
Ein Teilchen, das sich auf einer vorgegebenen Bahn bewegt (a), eine über eine Tischkante gleitende Kette (b), ein Doppelpendel (c), und zwei über eine Rolle verbundene Körper (d). Das Doppelpendel hat zwei
Freiheitsgrade, alle anderen Systeme haben jeweils einen Freiheitsgrad.
Ein System, an dem die Effizienz des neuen Verfahrens noch einmal deutlich gemacht werden soll, ist in
Abbildung 12.2(b) dargestellt. Eine Kette der Masse m und Länge ` gleitet reibungsfrei über eine Tischkante und fällt von dort aus senkrecht nach unten.
Die Kette ist ein System aus sehr vielen Teilchen. Man kann sich leicht vorstellen, dass es sehr umständlich wäre, nun die einzelnen Kettenglieder zu betrachten und für diese die Bewegungsgleichungen aufzustellen. Wir müssten dann die Zwangskräfte berücksichtigen, die die Abstände zwischen den Gliedern
fixieren und die Kette in ihrer vorgegebenen Bahn halten.
Das System hat jedoch unabhängig von der Anzahl der Glieder nur genau einen Freiheitsgrad. Wir
können dafür wieder eine Koordinate s einführen, die zum Beispiel die Länge der über die Kante nach
unten hängenden Kette festlegt. Dann können wir die kinetische Energie leicht angeben. Bewegt sich
nämlich das untere Ende der Kette mit der Geschwindigkeit ṡ, so bewegen sich alle Kettenglieder mit
derselben Geschwindigkeit. Da die kinetische Energie nicht von der Richtung der Bewegung im Raum
abhängt, spielt es dabei keine Rolle, wie viele Glieder sich auf dem Tisch in horizontale Richtung bewegen,
und wie viele sich in vertikale Richtung bewegen. Es gilt immer T = m ṡ 2 /2.
Die potenzielle Energie des Systems hängt davon ab, welcher Teil der Kette überhängt. Setzen wir das
Gravitationspotenzial auf der Tischebene gleich Null, so haben die oben liegenden Glieder keine potenzielle Energie. Der überhängende Teil der Kette hat die Länge s und befindet sich in einer Höhe zwischen 0
und −s, also im Mittel auf der Höhe −s/2. Die Masse dieses Teils der Kette ist m s/`. Da das Gravitationspotenzial linear ist, ergibt sich daraus
T =
m 2
ṡ ,
2
V=−
mg 2
s
2`
⇒
L=
m 2 mg 2
ṡ +
s.
2
2`
(12.26)
Das sieht aus wie die Lagrange-Funktion eines harmonischen Oszillators, jedoch hat das Potenzial das
falsche Vorzeichen. Wir können sofort die Bewegungsgleichung angeben. Sie lautet
d ∂L ∂L
−
= m s̈ − ω 2 s = 0,
dt ∂ ṡ
∂s
73
g
mit ω 2 = .
`
(12.27)
Die allgemeine Lösung ist
s(t) = b eω t + c e−ω t ,
(12.28)
wobei die Integrationskonstanten b und c den Anfangsbedingungen anzupassen sind. Die Kette gleitet mit
exponentiell ansteigender Geschwindigkeit über die Tischkante.
Aufgabe 12.8 Bei der Herleitung des Potenzials haben wir alle Effekte, die beim Ablaufen der einzelnen
Kettenglieder über die Tischkante auftreten, vernachlässigt. Das ist gerechtfertigt, wenn die Kette aus
sehr vielen kurzen Gliedern besteht. Man zeige, dass unter dieser Annahme die Form der Tischkante nicht
relevant ist. Es kann sich um eine beliebig abgerundete Kante handeln. Man stelle sich dazu die Kette als
kontinuierliches Objekt mit eine Masse pro Länge µ = m/` vor, und bestimme die potenzielle Energie
durch eine Integration.
Aufgabe 12.9 Wie sieht die Lagrange-Funktion für die Kette aus, wenn sie an der Tischkante nicht nach
unten sondern, durch eine geeignete Vorrichtung geführt, nach oben abknickt? Wie sieht dann die allgemeine Lösung der Bewegungsgleichung aus?
Ein weiteres interessantes System ist das Doppelpendel in Abbildung 12.2(c). Es besteht aus einem Pendel
der Länge `1 , an dem ein Körper der Masse m1 montiert ist. An diesem wiederum hängt ein Körper der
Masse m2 an einer Stange der Länge `2 . Der Einfachheit halber soll dieses Pendel nur in einer Ebene
schwingen.
Wie man sich leicht überlegt, hat dieses System zwei Freiheitsgrade, also einen zweidimensionalen
reduzierten Konfigurationsraum. An diesem Beispiel lässt sich sehr schön zeigen, wie die Berechnung der
reduzierten Lagrange-Funktion im allgemeinen erfolgt. Wir gehen daher das Verfahren aus dem letzten
Abschnitt noch einmal Schritt für Schritt durch.
e für ein allgemeines Zwei-TeilchenZunächst betrachten wir den erweiterten Konfigurationsraum Q
System. Dies ist ein sechsdimensionaler Raum, auf dem wir die Koordinaten (x 1 , y1 , z2 , x1 , y2 , z2 )
einführen. Das sind die kartesischen Ortskoordinaten der beiden Teilchen. Der Ursprung des Koordinatensystems soll sich im Aufhängepunkt des Pendels befinden, und die Gravitationskraft wie immer in
Richtung der negativen z-Achse zeigen. Für die kinetische und potenzielle Energie gilt dann
T =
1
1
m1 ẋ12 + ẏ12 + ż12 + m2 ẋ22 + ẏ22 + ż22 ,
2
2
V = g (m1 z1 + m2 z2 ).
(12.29)
Die Zwangsbedingungen lauten
y1 = 0,
y2 = 0,
x12 + z12 − `12 = 0,
(x2 − x1 )2 + (z2 − z1 )2 − `22 = 0.
(12.30)
Die Lösungen der letzten beiden Gleichungen lassen sich wie folgt durch zwei Parameter α und β darstellen,
x1 = `1 sin α,
x2 = `1 sin α + `2 sin β,
z1 = −`1 cos α,
z2 = −`1 cos α − `2 cos β.
(12.31)
Wie man leicht sehen kann, sind dies gerade die in Abbildung 12.2(c) eingezeichneten Auslenkwinkel
α und β. Dies sind die Koordinaten auf dem reduzierten Konfigurationsraum Q. Wir müssen nun die
Energiefunktionen (12.29) als Funktionen von α und β und deren Zeitableitungen darstellen.
Aufgabe 12.10 Man verifiziere das Ergebnis
T =
1
1
(m1 + m2 ) `12 α̇2 + m2 `22 β̇ 2 + m2 `1 `2 α̇ β̇ cos(α − β),
2
2
V = −g (m1 + m2 ) `1 cos α − g m2 `2 cos β,
74
(12.32)
und die daraus resultierenden Bewegungsgleichungen
d
(m1 + m2 ) `12 α̇ + m2 `1 `2 β̇ cos(α − β) +
dt
+ m2 `1 `2 α̇ β̇ sin(α − β) + g (m1 + m2 ) `1 sin α = 0,
d
m2 `22 β̇ + m2 `1 `2 α̇ cos(α − β) +
dt
+ m2 `1 `2 α̇ β̇ sin(β − α) + g m2 `2 sin β = 0.
(12.33)
Lassen sich diese Gleichungen immer nach α̈ und β̈ auflösen?
Das ist ein recht kompliziertes gekoppeltes System von nichtlinearen Differenzialgleichungen. Die allgemeine Lösung lässt sich nicht mehr explizit angeben.
Hier liegt bereits der allgemeine Fall vor, bei dem die kinetische Energie zwar eine quadratische Funktion der Geschwindigkeiten α̇ und β̇ ist. Aber weder ist die Massenmatrix diagonal, noch sind ihre Einträge
konstant. Es tritt ein Mischterm auf, der das Produkt α̇ β̇ enthält, und dieser hängt zudem noch von α und β
ab. Es ist nicht mehr möglich, die Massenmatrix durch eine Koordinatentransformation zu diagonalisieren,
und folglich ist es auch nicht möglich, die Bewegungsgleichungen zu entkoppeln.
Aufgabe 12.11 Man diskutiere den Fall m1 m2 , also den Grenzfall, in dem der obere Pendelkörper
sehr viel schwerer ist als der untere. Man zeige, dass sich dann der obere Arm des Doppelpendels wie ein
einzelnes Pendel verhält, während sich der untere Arm wie ein angetriebenes Pendel verh ält, wobei die
Schwingungen des oberen Armes den äußeren Antrieb darstellen.
Aufgabe 12.12 In dem umgekehrten Grenzfall m1 m2 , in dem die Masse des oberen Pendelkörper
verschwindend klein ist, lassen sich die Bewegungsgleichungen sogar explizit l ösen. Man zeige dies durch
eine geschickte Koordinatentransformation auf dem Konfigurationsraum. Man findet diese Transformation, wenn man sich zunächst überlegt, welche Art von Bewegungen das Pendel in diesem Fall ausf ührt.
Aufgabe 12.13 Für kleine Auslenkungwinkel α, β 1 lassen sich die Winkelfunktionen in (12.32) in
eine Taylor-Reihe entwickeln. Man vernachlässige alle Terme, die von vierter Ordnung oder höher in α,
β, α̇ oder β̇ sind. Man zeige, dass sich dann die Lagrange-Funktion für einen gekoppelten harmonischen
Oszillator ergibt. Welches sind die Eigenfrequenzen dieses Systems, und wie sehen die Eigenmoden aus?
Aufgabe 12.14 Um einen Eindruck von den Bewegungen des Doppelpendels zu bekommen, kann man die
Bewegungsgleichungen (12.33) numerisch integrieren. Man gibt als Anfangsbedingungen α(t 0 ), β(t0 ),
α̇(t0 ) und β̇(t0 ) vor, und berechnet anschließend die Funktionen α(t) und β(t) mit einem geeigneten numerischen Verfahren. Solche sind in den gängigen “intelligenten” Programmiersprachen wie Mathematica
oder Maple vorprogrammiert, so dass man letztlich nur die Differenzialgleichungen und die Anfangsbedingungen eingeben muss. Es ist sogar möglich, das Verfahren so weit zu automatisieren, dass man nur
die Lagrange-Funktion eingeben muss.
Aufgabe 12.15 In Abbildung 12.2(d) ist ein weiteres mechanisches System mit nur einem Freiheitsgrad
dargestellt. Zwei Körper sind über eine starre Rolle miteinander verbunden. Die Seile, an denen die K örper
hängen, sind jedoch auf verschiedenen Radien aufgewickelt. Als verallgemeinerte Koordinaten kann wahlweise der Drehwinkel der Rolle oder die Länge eines der beiden herabhängenden Seile verwendet werden.
Welche Beziehung besteht zwischen diesen Größen? Man finde die Lagrange-Funktion und löse die Bewegungsgleichungen. Die kinetische Energie der Rolle kann entweder vernachl ässigt werden, oder es kann
der weiter unten hergeleitete Ausdruck (12.36) verwendet werden.
75
Das fixierte Rad
Ein etwas anspruchsvolleres mechanisches System ist in Abbildung 12.3 dargestellt. Es dient zur Vorbereitung auf ein späteres Kapitel, in dem wir uns mit den Drehbewegungen eines starren Körpers beschäftigen
werden. In der hier gezeigten vereinfachten Version lässt es sich jedoch mit den bereits zur Verfügung
stehenden Mitteln beschreiben.
In der einfachsten Version von Abbildung 12.3(a) betrachten wir ein Rad, dessen Achse im Raum fixiert
ist. Es kann sich also nur um diese vorgegebene Achse drehen, und besitzt folglich nur einen Freiheitsgrad.
Dies ist der Drehwinkel χ. Wir machen außerdem die vereinfachte Annahme, dass sich die gesamte Masse
M des Rades auf die Lauffläche konzentriert, also auf einen Kreisring vom Radius R. Sie verteilt sich dort
auf N Teilchen, die in gleichmäßigen Winkelabständen auf dem Kreis angeordnet sind.
Es sei rn , mit n ∈ {1, . . . , N }, der Ort des n-ten Teilchens, und das Koordinatensystem sei so gewählt,
dass die Achse des Rades in Richtung der x-Achse zeigt. Dann ist
rn = o + R sin χn ey − cos χn ez ,
mit χn = χ −
2π n
.
N
(12.34)
Der Koordinatenursprung o ist natürlich der Mittelpunkt des Rades. Die Teilchen haben wir so durchnummeriert, dass sich das Teilchen mit der Nummer n genau dann “unten”, also auf der negativen z-Achse
befindet, wenn der Drehwinkel gerade χ = 2π n/N ist. Die Nummerierung können wir als periodisch
betrachten, so dass die Indizes n und n + N dassselbe Teilchen bezeichnen.
Für die Geschwindigkeit des n-ten Teilchens ergibt sich
ṙn = R χ̇ cos χn ey + sin χn ez ,
(12.35)
denn die einzige zeitabhängige Größe ist der Drehwinkel χ, und die Winkelgeschwindigkeit ist natürlich
für alle Teilchen gleich, χ̇n = χ̇. Daraus können wir leicht die kinetische Energie berechnen. Jedes einzelne Teilchen hat eine Masse M/N . Es bewegt sich mit einer Geschwindigkeit R χ̇, besitzt also die
kinetische Energie M (R χ̇)2 /(2 N ). Die Summe über alle Teilchen ist
T =
1
M R2 χ̇2 .
2
(12.36)
Auch hier ist es wieder unnötig, die Zwangsbedingungen explizit zu kennen. Es genügt, ihre Lösungen zu
parametrisieren, also die Orte (12.34) der einzelnen Teilchen als Funktion der reduzierten Koordinate χ
darzustellen, um die kinetische Energie T als Funktion von χ und χ̇ zu berechnen.
Wenn auf das Rad keine dynamischen Kräfte einwirken, haben wir damit auch schon die LagrangeFunktion gefunden, denn es ist L = T . Wir können unmittelbar die Bewegungsgleichung χ̈ = 0 ablesen.
Das Rad dreht sich gleichmäßig mit konstanter Winkelgeschwindigkeit. Das ist natürlich genau das, was
wir erwartet haben.
Nun wollen wir feststellen, was passiert, wenn auf die Lauffläche des Rades eine Reibungskraft wirkt.
Eine solche Kraft kann nicht durch ein Potenzial beschrieben werden. Wir müssen also die d’Alembertsche
Form der Bewegungsgleichungen verwenden. Dazu müssen wir zunächst die Kraftkomponente F χ in Richtung der reduzierten Koordinate χ finden. Dafür hatten wir die Formel (11.58) angegeben. Es gilt also
Fχ =
X ∂rn
n
∂χ
· Fn =
X
n
R cos χn ey + sin χn ez · Fn .
(12.37)
Hier ist Fn die dynamische Kraft, die auf das Teilchen mit der Nummer n wirkt. Die partielle Ableitung
∂rn /∂χ haben wir aus (12.34) entnommen.
Es soll nun auf ein ganz bestimmtes Teilchen, und zwar das, welches sich gerade an unterster Stelle
befindet, eine Reibungskraft wirken, die proportional zu seiner Geschwindigkeit und ihr entgegengerichtet
76
replacements
(d)
ϑ
χ
ϕ
(b)
(a)
(c)
Abbildung 12.3: Ein Rad als mechanisches System mit einem, zwei bzw. drei Freiheitsgraden. Ist die
Achse fixiert (a), so ist der einzige Freiheitsgrad der Drehwinkel χ. Kann sich die Achse frei in einer
Ebene drehen (b), so ist die Ausrichtung ϕ der Achse ein zweiter Freiheitsgrad. Bewegt sich das Rad
völlig frei (c), so ist der dritte Freiheitsgrad der Kippwinkel ϑ.
ist. Damit modellieren wir die Situation, dass das Rad an einer Stelle durch einen bremsenden Gegenstand
berührt wird, zum Beispiel auf einer Standfläche aufliegt oder eine Bremse an der Lauffläche angreift.
Für das Teilchen mit der Nummer n̄, welches sich zu einem bestimmten Zeitpunkt ganz unten befindet,
gilt χn̄ = 0, also n̄ = N χ/2π, oder genauer, n̄ ist die ganze Zahl, die dieser am nächsten liegt. Für große
N können wir aber den Fehler, den wir dabei machen, vernachlässigen. Wichtig ist nur, dass die Kraft auf
genau ein Teilchen wirken soll, und dass für dieses gerade χn̄ = 0 ist.
Die Geschwindigkeit dieses Teilchens ist dann laut (12.35) ṙn̄ = R χ̇ ey . Folglich ist die Reibungskraft,
die auf dieses Teilchen wirkt,
Fn̄ = −η ṙn̄ = −η R χ̇ ey ,
(12.38)
wobei η die Reibungskonstante ist. Setzen wir dies in (12.37) ein, so bleibt nur ein Term von der Summe
übrig, denn es soll ja nur auf dieses eine Teilchen eine Kraft wirken. Es ergibt sich, wieder mit χ n̄ = 0,
Fχ = −η R2 χ̇.
(12.39)
Die verallgemeinerte Reibungskraft Fχ ist ebenfalls proportional zur verallgemeinerten Geschwindigkeit
χ̇ und ihr entgegengerichtet. Es tritt nur neben der Reibungskonstante η noch ein Faktor R 2 auf. Er sorgt
unter anderem dafür, dass die verallgemeinerte Kraft die richtige physikalische Dimension hat. Sie ist
nämlich eigentlich keine Kraft sondern ein Drehmoment, und χ̇ ist keine Geschwindigkeit sondern eine
Winkelgeschwindigkeit, wenn man die “richtigen” Bezeichnungen für die physikalischen Dimensionen
verwendet.
Die Bewegungsgleichungen stellen sich nun wie folgt dar. Wir werten die linke Seite von (11.44) für
die gegebene Energiefunktion T aus, und setzen auf der rechten Seite die verallgemeinerte Kraft ein,
d ∂T
∂T
−
= Fχ
dt ∂ χ̇
∂χ
⇒
M R2 χ̈ = −η R2 χ̇.
(12.40)
Offenbar hebt sich der Radius R des Rades aus dieser Gleichung heraus, so dass das Rad die gleiche
Bremswirkung erfährt wie ein Körper der Masse M , der sich geradlinig bewegt und dabei eine Reibungskonstante η spürt.
Aufgabe 12.16 Wie sieht die allgemeine Lösung der Bewegungsgleichung (12.40) aus?
Aufgabe 12.17 Welche Bewegungsgleichung ergibt sich, wenn wir f ür die Reibungskraft eine andere
Abhängigkeit von der Geschwindigkeit annehmen? Man betrachte allgemein einen Zusammenhang der
77
Form Fn̄ = −η |ṙn̄ |k−1 ṙn̄ , also ein Ansteigen der Reibungskraft mit der Potenz k > 0. Kommt das Rad
dann nach endlicher Zeit zum Stillstand oder nicht? Und wenn es nicht nach endlicher Zeit zum Stillstand
kommt, macht es dann insgesamt endlich viele oder unendlich viele Umdrehungen?
Aufgabe 12.18 Wenn sich das Rad im Schwerefeld der Erde befindet, wirkt eigentlich noch die Gravitationskraft auf jedes Teilchen. Man setze diese für Fn in (12.37) ein und zeige, dass sie nicht zu Fχ beiträgt.
Man begründe damit die intuitiv richtige Vorstellung, dass sich die Gravitationskr äfte gegenseitig aufheben, weil sie das Rad in entgegengesetzte Richtungen zu beschleunigen versuchen. Gilt das auch, wenn
sich das Rad in einem inhomogenen Gravitationsfeld befindet?
Aufgabe 12.19 Man zeige, dass sich qualitativ dieselbe Lagrange-Funktion f ür das Rad auch dann ergibt,
wenn man nicht annimmt, dass alle Teilchen auf einem Kreisring mit Radius R angeordnet sind. Es gen ügt
anzunehmen, dass die Massen gleichmäßig, also rotationssymmetrisch angeordnet sind. Welche konkrete
Form ergibt sich dann für L?
Das hängende Rad
Nun wollen wir ein etwas komplizierteres System betrachten. Die Achse des Rades ist nicht mehr
vollständig fixiert, sondern kann sich, wie in Abbildung 12.3(b) gezeigt, in einer Ebene frei drehen. Ein
solches System lässt sich leicht realisieren, indem man etwa die Achse des Laufrades eines Fahrrades an
zwei Seilen aufhängt, so dass sich die Achse in einer horizontalen Ebene drehen kann.
Das System hat jetzt zwei Freiheitsgrade, nämlich den Drehwinkel des Rades χ und die Ausrichtung
der Achse, die wir ebenfalls durch eine Winkelkoordinate ϕ beschreiben können. Der reduzierte Konfigurationsraum ist demnach ein zweidimensionaler Raum. Wir gehen wieder nach dem gleichen Schema vor,
um die kinetische Energie zu berechnen. Zuerst stellen wir die Orte r n der Teilchen als Funktionen von χ
und ϕ dar. Dazu ist es nützlich, die Einheitsvektoren
e0 (ϕ) = − sin ϕ ex + cos ϕ ey
e(ϕ) = cos ϕ ex + sin ϕ ey ,
(12.41)
einzuführen. Der Vektor e(ϕ) gibt die Ausrichtung der Achse an, und e 0 (ϕ) steht dazu senkrecht. Dabei
ist e0 (ϕ) auch gleichzeitig die Ableitung von e(ϕ) nach ϕ, und es gilt e00 (ϕ) = −e(ϕ).
Die Darstellung (12.34) der Teilchenorte lässt sich dann unmittelbar verallgemeinern. Für das gedrehte
Rad müssen wir nur ey durch den gedrehten Einheitsvektor e0 (ϕ) ersetzen,
rn = o + R sin χn e0 (ϕ) − cos χn ez ,
mit χn = χ −
2π n
.
N
(12.42)
Für die Geschwindigkeiten der Teilchen ergibt sich jetzt
ṙn = R χ̇ cos χn e0 (ϕ) + sin χn ez − R ϕ̇ sin χn e(ϕ).
(12.43)
Die kinetische Energie des Teilchens mit der Nummer n ist demnach
1M 2 2 1M 2 2
1M
R χ̇ +
R ϕ̇ sin2 χn .
ṙn · ṙn =
2 N
2 N
2 N
(12.44)
Wenn wir über alle N Teilchen summieren, ergibt der erste Term wieder den Ausdruck M R 2 χ̇2 /2. Den
zweiten Term können wir für große N durch ein Integral approximieren. Für N → ∞ gilt mit x = n/N
Z
N
1
1 X 2
sin (χ − 2πn/N ) → dx sin2 (χ − 2π x) = .
N n=1
2
1
0
78
(12.45)
Die linke Seite ist gerade die Summendarstellung für das Integral, wenn wir das Intervall von 0 bis 2π in
N Teilintervalle aufteilen.
Die kinetische Energie des Systems, ausgedrückt als Funktion der Geschwindigkeiten χ̇ und ϕ̇, ist folglich
1
1
T = M R2 χ̇2 + M R2 ϕ̇2 .
(12.46)
2
4
Offenbar steckt in einer Rotation des Rades um seine Achse mehr Energie als in einer Rotation der Achse
in der Ebene. Das liegt daran, dass sich bei einer Rotation des Rades um die Achse alle Massen mit der
gleichen Geschwindigkeit R χ̇ durch den Raum bewegen. Bei einer Drehung der Achse bewegen sich
jedoch Teile des Rades langsamer oder sogar gar nicht, wenn sie sich gerade auf der z-Achse befinden.
Was sofort aus (12.46) hervor geht, ist, dass die beiden Drehungen unabhängig voneinander stattfinden.
Es gibt keine Kopplung zwischen den beiden Bewegungen, jedenfalls solange keine dynamische Kraft auf
das Rad wirkt. Dann ist die Lagrange-Funktion L = T , und die Bewegungsgleichungen sind χ̈ = 0 und
ϕ̈ = 0. Wenn das Rad entsprechend angeworfen wird, dreht es sich gleichmäßig um seine Achse, und
gleichzeitig dreht sich die Achse gleichmäßig in der Ebene.
Dass sich dieses Resultat auf diese sehr einfache Weise ergibt, ist tatsächlich ein Erfolg der Lagrangeschen bzw. d’Alembertschen Methode, und es belegt deutlich deren Effizienz. Man stelle sich vor, man
würde versuchen, dieses Ergebnis durch Berechnung der Zwangskräfte zu bekommen, die die Teilchen
im Rad aneinander binden. Zwar würde man nach einigen Überlegungen auch zu dem Resultat kommen,
dass es nur zwei Freiheitsgrade gibt, und dass diese unabhängig voneinander gleichförmige Bewegungen
ausführen. Der Weg dahin wäre aber sehr mühsam.
Wir wollen auch hier noch einmal die Auswirkungen einer Reibungskraft auf das System berechnen,
und zwar um zu demonstrieren, dass die Umrechnung der Kräfte in die reduzierten Koordinaten nicht
immer ganz trivial ist. Weiter oben hatten wir den Ansatz gemacht, dass zu jedem Zeitpunkt auf ein bestimmtes Teilchen eine Kraft wirkt, die proportional zu seiner Geschwindigkeit und ihr entgegengerichtet
ist. Das Resultat war, dass genau eine solche der Geschwindigkeit entgegengerichtete Kraft auch auf dem
reduzierten Konfigurationsraum auftrat. Das legt die Vermutung nahe, dass genau das gleiche für das Rad
mit zwei Freiheitsgraden gilt. Das ist aber nicht der Fall, wie wir jetzt zeigen werden.
Wir nehmen wieder an, dass auf das Teilchen, das sich gerade ganz unten auf der z-Achse befindet,
eine Reibungskraft wirkt, die der Geschwindigkeit dieses Teilchens entgegengerichtet ist. Das Teilchen ist
wieder das mit der Nummer n̄ = N χ/2π, denn für dieses Teilchen ist χ n̄ = 0 und somit rn̄ = o − ez . Für
die Geschwindigkeit dieses Teilchens gilt nun laut (12.43) ṙn̄ = R χ̇ e(ϕ). Folglich ist die Reibungskraft
wieder durch den Ausdruck (12.38) gegeben, nur dass wir dort e y durch e0 (ϕ) ersetzen müssen,
Fn̄ = −η ṙn̄ = −η R χ̇ e0 (ϕ).
(12.47)
Die verallgemeinerte Kraft auf dem zweidimensionalen reduzieren Konfigurationsraum hat jetzt zwei
Komponenten, nämlich Fχ und Fϕ . Wir benutzen wieder die allgemeine Formel (11.58),
X ∂rn
X
Fχ =
· Fn =
R cos χn e0 (ϕ) + sin χn ez · Fn ,
∂χ
n
n
Fϕ =
X ∂rn
n
∂ϕ
· Fn = −
X
n
R sin χn e(ϕ) · Fn .
(12.48)
Setzen wir alle Fn gleich Null, nur für n = n̄ (12.47) ein, so ergibt sich wieder Fχ = −η R2 χ̇. Jedoch ist
Fϕ = 0, denn der Vektor Fn̄ steht auf e(ϕ) senkrecht, und außerdem ist sogar noch sin χn̄ = 0. Es wirkt
also im Konfigurationsraum keine Reibungskraft in Richtung der Koordinate ϕ.
Wenn wir das wieder in die d’Alembertschen Bewegungsgleichungen einsetzen, bekommen wir nach
ein paar Vereinfachungen
M χ̈ = −η χ̇,
ϕ̈ = 0.
(12.49)
79
Die Rotation des Rades um seine Achse ist wieder gebremst, die Drehung der Achse in der Ebene jedoch
nicht. Das hat auch einen einfachen, physikalisch anschaulichen Grund. Wenn wir annehmen, dass die
Reibung dadurch verursacht wird, dass das Rad an der untersten Stelle an einem Punkt aufliegt, dann
bewegt sich dieser Auflagepunkt zwar bei einer Rotation des Rades um seine Achse, nicht jedoch bei einer
Drehung der Achse in der Ebene. Deshalb tritt bei einer solchen Bewegung auch keine Reibung auf.
Genau dies wird bei der Umrechnung der Kraft in die reduzierten Koordinaten berücksichtigt. Das,
was wir abstrakt als Transformationsverhalten eines dualen Vektors im Konfigurationsraum hergeleitet
haben, beschreibt in eine physikalische Sprache übersetzt die Richtung, in die eine Kraft im reduzierten
Konfigurationsraum des Systems wirkt, also auf welche der reduzierten Koordinaten sie Einfluss nimmt.
Aufgabe 12.20 Anstatt das Rad an der untersten Stelle abzubremsen, k önnen wir uns vorstellen, dass es
in der Ebene, die in Abbildung 12.3 schraffiert dargestellt ist, an einem festen Ring reibt. Es wirkt dann an
zwei Stellen eine Reibungskraft, nämlich jeweils auf die beiden Teilchen, die sich gerade in der x-y-Ebene
befinden. Auch hier machen wir den Ansatz, dass die Reibungskr äfte proportional zu den Geschwindigkeiten dieser beiden Teilchen und ihren entgegengerichtet sind. Welche der beiden Bewegungen des Rades
wird jetzt schneller abgebremst, die Drehung um die Achse, oder die Drehung der Achse in der Ebene?
Aufgabe 12.21 In Abbildung 12.3(c) ist die Achse des Rades gar nicht mehr fixiert. Sie kann nun auch
kippen. Für den dritten Freiheitsgrad führen wir die Koordinate ϑ ein, die den Winkel zwischen der Achse
des Rades und der z-Achse misst. Die Koordinate wird deshalb so gew ählt, weil (ϑ, ϕ) dann die üblichen
Kugelkoordinaten sind, die die Ausrichtung der Achse im Raum festlegen, und χ wieder der Drehwinkel
des Rades um die Achse ist. Man zeige zunächst, dass der Ort des Teilchens Nummer n jetzt wie folgt
gegeben ist,
(12.50)
rn = o + R sin χn e0 (ϕ) + R cos χn cos ϑ e(ϕ) − sin ϑ ez .
Man bestimme daraus die Geschwindigkeiten der Teilchen und zeige, dass die kinetische Energie durch
die Funktion
T =
Θ 2 Θ 2 Θ
χ̇ + ϑ̇ + (1 + cos2 ϑ) ϕ̇2 + Θ cos ϑ χ̇ ϕ̇,
2
4
4
mit Θ = M R2 ,
(12.51)
gegeben ist. Aus ihr lassen sich die Lagrangeschen Bewegungsgleichungen ableiten. Aus denen f ür die
Koordinaten χ und ϕ ergibt sich, dass die Impulse pχ = ∂T /∂ χ̇ und und pϕ = ∂T /∂ ϕ̇ Erhaltungsgrößen
sind, da die Ableitungen ∂T /∂ϕ und ∂T /∂χ verschwinden. Man benutze das, um die Bewegungsgleichung
für ϑ mit Hilfe eines effektives Potenzial darzustellen,
Θ
ϑ̈ = −Ve 0 (ϑ),
2
pχ2 + pϕ2 − 2 pχ pϕ cos ϑ
.
mit Ve (ϑ) =
Θ sin2 ϑ
(12.52)
Man skizziere das effektive Potenzial und diskutiere qualitativ die möglichen Bewegungsformen des Rades.
Zeitabhängige Zwangsbedingungen
Als nächstes wollen wir ein paar einfache Beispiele für Systeme mit zeitabhängigen Zwangsbedingungen
diskutieren, um zu zeigen, dass auch solche Systeme sehr effizient mit Hilfe der Lagrangeschen bzw.
d’Alembertschen Bewegungsgleichungen beschrieben werden können. Der reduzierte Konfigurationsraum
e und wir
Qt ist dann zu jedem Zeitpunkt t eine andere Teilmenge des erweiterten Konfigurationsraumes Q,
müssen zeitabhängige Koordinaten verwenden, um die Zwangsbedingungen zu lösen.
Als erstes betrachten wir ein System, das dem Pendel mit variabler Länge sehr ähnlich ist. Es ist allerdings einfacher, da keine Gravitationskraft wirkt und die Bewegung nur in einer Ebene stattfindet. Es ist
in Abbildung 12.4(a) dargestellt. Ein Körper der Masse m befindet sich auf einem Tisch. Er ist an einem
80
replacements
ϕ
(c)
(d)
m
r
m
ω
c
(b)
(a)
Abbildung 12.4: Zwei einfache mechanische System mit zeitabhängigen Zwangsbedingungen. Im ersten
Beispiel gleitet der Körper auf einer Tischplatte und dabei an einem Seil nach innen gezogen (a). Der
einzige Freiheitsgrad ist die Winkelkoordinaten ϕ. Im zweiten Beispiel gleitet der Körper auf einer rotierenden Stange (b). Der einzige Freiheitsgrad ist jetzt die radiale Koordinaten r.
Seil befestigt, das durch ein Loch im Tisch eingezogen wird. Die Länge des Seiles ist ` zur Zeit t = 0, und
sie soll sich mit einer konstanten Geschwindigkeit c verkürzen.
Offenbar hat das System nur einen Freiheitsgrad. Die Länge des Seiles ist vorgegeben, so dass als
einzige unabhängige Koordinate der Winkel ϕ bleibt, der angibt, in welcher Richtung sich der Körper,
vom Loch aus gesehen, befindet. Wenn (x, y) kartesische Koordinaten in der Ebene sind, wobei sich der
Ursprung im Loch befindet, so gilt für den Ort des Körpers
x = (` − c t) cos ϕ,
y = (` − c t) sin ϕ.
(12.53)
Daraus können wir wieder die kinetische Energie berechnen. Allerdings müssen wir jetzt die explizite
Zeitabhängigkeit der Koordinaten beachten. Es ist
ẋ = −(` − c t) ϕ̇ sin ϕ − c cos ϕ,
ẏ = (` − c t) ϕ̇ cos ϕ − c sin ϕ,
(12.54)
und daher
1
1
1
m ẋ2 + ẏ 2 = m (` − c t)2 ϕ̇2 + m c2 .
(12.55)
2
2
2
Das gleiche Resultat hätten wir natürlich auch aus der Darstellung (11.60) der kinetischen Energie in
Zylinderkoordinaten entnehmen können, indem wir dort r = ` − c t und z = 0 setzen.
Den konstanten Term m c2 /2 können wir vernachlässigen, da er in die Bewegungsgleichungen nicht
eingeht. Nur der Term, der proportional zu ϕ̇2 ist, erscheint in der Bewegungsgleichung
T =L=
d ∂L ∂L
d
−
=
m (` − c t)2 ϕ̇ = 0.
dt ∂ ϕ̇ ∂ϕ
dt
(12.56)
Auch hier wird die Bewegungsgleichung wieder in einer Form geliefert, aus der wir sofort den entscheidenden Erhaltungssatz ablesen können. In der Klammer steht natürlich wieder der Drehimpuls. Dass er
erhalten ist, ergibt sich auch daraus, dass die Zwangskraft, die auf den Körper wirkt, eine Zentralkraft ist.
Als Lösung findet man
m (` − c t)2 ϕ̇ = pϕ
⇒
ϕ̇ =
pϕ
m (` − c t)2
81
⇒
ϕ(t) =
pϕ
.
c m (` − c t)
(12.57)
Für t → `/c, wenn das Seil ganz eingezogen wird, wird der Körper offenbar immer schneller und umläuft
das Zentrum unendlich oft. Berechnen wir die kinetische Energie als Funktion der Zeit, so ergibt sich
T −
1
pϕ2
1
m c2 = m (` − c t)2 ϕ̇2 =
→ ∞ für
2
2
2 m (` − c t)2
t → `/c.
(12.58)
Wo kommt diese Energie her? Sie muss offenbar als mechanische Leistung von der Zwangskraft aufgebracht werden, also von der äußeren Instanz geliefert werden, die das Seil verkürzt. Um das zu zeigen,
berechnen wir für dieses Beispiel die Zwangskraft. Wir führen dazu auf dem Konfigurationsraum die
zusätzliche Koordinate r ein und definieren die erweiterte Lagrange-Funktion mit einem Multiplikator λ
und der Zwangsbedingung C = r − ` + c t,
1
Le = m ṙ 2 + r 2 ϕ̇2 − λ (r − ` + c t).
2
(12.59)
Der Lagrange-Multiplikator ist dann bis auf das Vorzeichen die r-Komponente der Zwangskraft, und die
ϕ-Komponente der Zwangskraft verschwindet,
Zr = −λ
∂C
= −λ,
∂r
Zϕ = −λ
∂C
= 0.
∂ϕ
(12.60)
Aus der Bewegungsgleichung für r ergibt sich
d
d ∂ Le ∂ Le
−
=
m ṙ − m r ϕ̇2 + λ
dt ∂ ṙ
∂r
dt
⇒
Zr = −λ = −
pϕ2
.
m (` − c t)3
(12.61)
Auch die Zwangskraft divergiert für t → `/c. Um das Seil ganz einzuziehen, wird schließlich eine unendliche Kraft benötigt. Die einzige Ausnahme liegt vor, wenn pϕ = 0 ist. Dann wird der Körper einfach radial
nach innen gezogen. In diesem Fall ist gar keine Zwangskraft erforderlich, da sich der Körper ohnehin
geradlinig und gleichförmig mit der Geschwindigkeit c auf das Loch zu bewegen würde.
Aufgabe 12.22 Man berechne die Gesamtlänge des von dem Körper zurückgelegten Weges im Zeitintervall 0 < t < `/c.
Aufgabe 12.23 Man diskutiere auch dieses Beispiel wieder mit einer zus ätzlichen Reibungskraft, die proportional zur Geschwindigkeit des Körpers auf der Ebene ist.
Das mechanische System in Abbildung 12.4(b) ist zu dem gerade diskutierten in einem gewissen Sinne
komplementär. Dort befindet sich ein Körper auf einer Stange, die mit einer Winkelgeschwindigkeit ω
rotiert. Auch hier bewegt sich der Körper in einer Ebene, jedoch wird diesmal statt der radialen Koordinate
die Winkelkoordinate durch die Zwangsbedingung vorgegeben. Am einfachsten gehen wir hier von der
Darstellung (12.59) der Lagrange-Funktion für ein freies Teilchen in Polarkoordinaten aus, und setzen
ϕ = ω t. Daraus ergibt sich
1
1
L = m ṙ 2 + m ω 2 r 2 .
(12.62)
2
2
Die einzige verbleibende Koordinate r auf dem reduzierten Konfigurationsraum gibt an, in welcher Entfernung vom Drehpunkt sich der Körper befindet. Sie kann hier auch negativ werden, wenn sich die Stange
in beide Richtungen erstreckt.
Diese Lagrange-Funktion kennen wir bereits. Es ist die gleiche Funktion (12.26), die wir auch schon für
die über die Tischkante gleitende Kette gefunden haben. Folglich ergeben sich auch die gleichen Lösungen. Es handelt sich um zwei äquivalente mechanische Systeme. Da sie die gleiche Lagrange-Funktion
besitzen, besitzen sie auch die gleichen dynamischen Eigenschaften.
82
replacements
ω
ϑ+
`
ϑ
(d)
(b)
m
ϑ−
(a)
(c)
Abbildung 12.5: Der Aufhängepunkt des Pendels (a) rotiert mit einer Winkelgeschwindigkeit ω und
zwingt das Pendel, ebenfalls mit dieser Winkelgeschwindigkeit zu rotieren. Der einzige Freiheitsgrad
ist der Auslenkwinkel ϑ. Es ergibt sich eine stabile Gleichgewichtslage (b), bei der das Pendel nach außen
ausgelenkt ist, sowie bei hinreichend hoher Antriebsgeschwindigkeit eine zweite stabile Gleichgewichtslage (c), bei der das Pendel nach innen ausgelenkt ist.
Der Körper auf der Stange “sieht” offenbar das Potenzial eines harmonischen Oszillators, allerdings
wieder mit dem falschen Vorzeichen, V (r) = −m ω 2 r 2 /2. Bei r = 0 befindet sich eine instabile Gleichgewichtslage. Nach beiden Seiten fällt das Potenzial ab, so dass der Körper nach außen beschleunigt wird.
Die allgemeine Lösung der Bewegungsgleichung ist
r(t) = b eω t + c e−ω t .
(12.63)
Die rotierende Stange ist eine Schleuder, auf der der Körper exponentiell nach außen beschleunigt wird.
Aufgabe 12.24 Die rotierende Stange lässt sich wie folgt variieren. Die Rotationsachse muss nicht zur
Stange senkrecht stehen. Der Körper bewegt sich dann nicht in einer Ebene, sondern auf einem Kegel.
Nehmen wir an, die Stange rotiere mit einer Winkelgeschwindigkeit ω um die z-Achse und bilde mit dieser
einen Winkel α. Zusätzlich spürt der Körper die Gravitationskraft. Wo befindet sich jetzt die Gleichgewichtslage? Handelt es sich um eine stabile oder instabile Gleichgewichtslage?
Das rotierende Pendel
Ein weiteres Beispiel für ein System mit zeitabhängigen Zwangsbedingungen ist das angetriebene Pendel
in Abbildung 12.5(a). Der Aufhängepunkt rotiert mit einer Winkelgeschwindigkeit ω auf einem Kreis mit
Radius a. Die Länge des Pendels sei `.
Legen wir den Koordinatenursprung o in die Mitte dieses Kreises, so befindet sich der Aufhängepunkt
zur Zeit t am Ort o+a e(ω t), wobei e(ϕ) wieder der Einheitsvektor (12.41) ist. In der einfachsten Version
kann das Pendel nur in eine Richtung schwingen, und zwar in der Ebene, die von e z und e(ω t) aufgespannt
wird. Es wird also gezwungen, mit dem Antrieb mit zu rotieren. Wir betrachten zuerst nur diese Version.
Als einzige reduzierte Koordinate haben wir dann den Auslenkwinkel ϑ. Der Pendelkörper befindet sich
am Ort
r = o + (a + ` sin ϑ) e(ω t) − ` cos ϑ ez .
(12.64)
83
replacements
(a)
(b)
(c)
(d)
Ve
−π
Ve
−π
π
ω=0
ϑ+
π
ω < ω0
ϑ−
−π
Ve
ϑ+
ϑ−
−π
π
ω = ω0
Ve
ϑ+
π
ω > ω0
Abbildung 12.6: Das effektive Potenzial für das rotierende Pendel mit a = 0.2 `. Die Antriebsfrequenz ω
nimmt von oben links nach unten rechts zu.
Ein positiver Winkel ϑ bedeutet, dass das Pendel “nach außen”, also in die Richtung ausgelenkt ist, in die
der Antrieb gerade zeigt. Für negatives ϑ ist das Pendel dagegen “nach innen”, also zur der Rotationsachse
hin ausgelenkt.
Wie üblich berechnen wir die kinetische Energie, indem wir erst die Geschwindigkeit bestimmen,
(12.65)
ṙ = (a + ` sin ϑ) ω e0 (ω t) + ` ϑ̇ cos ϑ e(ω t) + sin ϑ ez ,
und anschließend das Betragsquadrat davon bilden. Daraus ergibt sich die kinetische Energie T , und für
das Potenzial V setzen wir wie üblich das Gravitationspotenzial an,
T =
1
1
m `2 ϑ̇2 + m ω 2 (a + ` sin ϑ)2 ,
2
2
V = −m g ` cos ϑ.
(12.66)
Bilden wir daraus die Lagrange-Funktion L = T −V, so hat diese wieder die übliche Form einer LagrangeFunktion für ein freies Teilchen in einem effektiven Potenzial,
L=
1
m `2 ϑ̇2 − Ve (ϑ),
2
1
mit Ve (ϑ) = −m g ` cos ϑ − m ω 2 (a + ` sin ϑ)2 .
2
(12.67)
Die Bewegungsgleichung für die Auslenkung ϑ ist folglich die für ein gewöhnliches Teilchen in einem
Potenzial Ve (ϑ), nur dass es sich hier um eine periodische Koordinate handelt, also ϑ und ϑ + 2 π dieselbe
Pendelstellung repräsentieren.
Die Form des effektiven Potenzials Ve hängt von den Parametern des Pendels ab. Entscheidend sind zwei
dimensionslose Größen, nämlich das Verhältnis des Radius
a des Antriebs zur Pendellänge `, sowie das
p
Verhältnis der Antriebsfrequenz ω zur Eigenfrequenz g/` des Pendels. Für einige typische Fälle ist das
Potenzial in Abbildung 12.6 dargestellt.
Für ω = 0 handelt es sich um ein gewöhnliches Pendel ohne Antrieb. Es gibt eine stabile Gleichgewichtslage bei ϑ = 0 und eine instabile Gleichgewichtslage bei ϑ = ±π. Schaltet man den Antrieb ein,
so verschiebt sich die stabile Gleichgewichtslage nach außen. Das Pendel wird durch die Drehung von
der Rotationsachse weg ausgelenkt und kann um die neue stabile Gleichgewichtslage bei ϑ = ϑ + > 0
schwingen. Abbildung 12.5(b) zeigt die “Ruhelage”, bei der das Pendel starr mit dem Antrieb rotiert. Für
84
ω → ∞ geht ϑ+ → π/2. Bei einem sehr schnellen Antrieb steht das Pendel beinahe horizontal. Das ist
natürlich genau das, was man erwartet.
Interessanterweise gibt es eine kritische Antriebsfrequenz ω = ω0 , bei der für ϑ = ϑ− < 0 eine zweite
Gleichgewichtslage auftritt. Diese ist zunächst instabil, da es sich um einen Sattelpunkt des Potenzials
handelt. Für ω > ω0 spaltet sie jedoch in eine stabile und eine instabile Gleichgewichtslage auf, so dass das
Pendel nun auch um die neue stabile Gleichgewichtslage bei ϑ = ϑ − schwingen kann. Die entsprechende
“Ruhelage”, bei der das Pendel starr rotiert, ohne zu schwingen, ist in Abbildung 12.5(b) dargestellt. Es
ist in dieser Lage nach innen, also zur Rotationsachse hin ausgelenkt.
Aufgabe 12.25 Man zeige, dass der kritische Wert für die Antriebfrequenz bei
ω02 = g `2/3 − a2/3 −3/2
(12.68)
liegt, und dass die zweite stabile Gleichgewichtslage nur dann auftreten kann, wenn a < ` ist. Gibt es daf ür
eine anschauliche Begründung? Warum ergibt sich für a = 0 für die kritische Antriebsfrequenz genau die
Eigenfrequenz ω0 2 = g/`?
Aufgabe 12.26 Eine anspruchsvollere Version des angetriebenen Pendels ergibt sich, wenn wir nicht mehr
verlangen, dass das Pendel nur in einer sich drehenden Ebene schwingt. Statt dessen lassen wir es jetzt
wie ein freies Pendel im Raum schwingen. Ein solches Pendel wird von der Gondel eines Kettenkarussells
realisiert. Der Ort r des Pendelkörpers lässt sich durch zwei Koordinaten (ϑ, ϕ) parametrisieren,
r = o + a e(ω t) + ` sin ϑ e(ϕ + ω t) − ` cos ϑ ez .
(12.69)
Hier ist ϑ wieder die Auslenkung, ϕ jedoch nicht wie üblich die Richtung der Auslenkung im Raum, sondern
die Abweichung der Auslenkrichtung von der momentanen Stellung des Antriebs. Man zeige, dass sich
daraus die zeitunabhängige Lagrange-Funktion
L=
1
m a2 ω 2 + `2 ϑ̇2 + `2 sin2 ϑ (ϕ̇ + ω)2 +
2
+ m a ω ` cos ϑ sin ϕ ϑ̇ + sin ϑ cos ϕ (ϕ̇ + ω) + m g ` cos ϑ
(12.70)
ergibt. Mit dem Satz aus Aufgabe 11.27 lässt sich diese vereinfachen. Man zeige, dass die alternative
Lagrange-Funktion
L0 =
1
m `2 ϑ̇2 + sin2 ϑ (ϕ̇ + ω)2 + m a ω 2 ` sin ϑ cos ϕ + m g ` cos ϑ
2
(12.71)
dieselben Bewegungsgleichungen liefert. Wegen der speziellen Wahl der Koordinaten entspricht eine
Lösung ϑ(t) = konst und ϕ(t) = konst einer Bewegung, bei der das Pendel starr mit dem Antrieb mitrotiert. Man zeige, dass dieses Pendel dieselben Gleichgewichtslagen hat wie zuvor das eingeschr änkte
Pendel, dass davon jedoch nur noch eine stabil ist, nämlich die mit ϑ = ϑ+ und ϕ = 0.
Anholonome Zwangsbedingungen
Die bis jetzt diskutierten mechanischen Systeme waren solche, deren Zwangsbedingungen sich auflösen
e definieren, und so die Zwangsbedinließen. Wir konnten einen reduzierten Konfigurationsraum Q ⊂ Q
gungen und die zugehörigen Lagrange-Multiplikatoren aus den Bewegungsgleichungen eliminieren. Es
gibt aber noch eine andere wichtige Klasse von Zwangsbedingungen, die typischerweise bei mechanischen Systemen auftritt.
85
replacements
(c)
(d)
q3
q3
q2
q
q1
q2
q1
Xµ q̇ µ = 0
q1
q2
(b)
(a)
Abbildung 12.7: Eine anholonome Zwangsbedingung schränkt die Geschwindigkeit q̇ ∈ TQ an jeder
Stelle q ∈ Q im Konfigurationsraum auf einen Untervektorraum ein (a). Über einen geeigneten Weg
kann trotzdem jeder Punkt im Konfigurationsraum erreicht werden (b).
Eine Zwangsbedingung kann auch eine Einschränkung an die Bewegungsrichtungen eines Systems sein,
ohne dass die Konfigurationen selbst eingeschränkt werden. Ein typisches Beispiel dafür ist eine rollende
Kugel auf einer Tischplatte. Jede Bewegung, die die Kugel auf dem Tisch ausführt, bedingt eine gleichzeitige Drehung. Die Konfigurationen selbst sind aber, mit Ausnahme der Forderung, dass die Kugel auf
dem Tisch liegen soll, nicht eingeschränkt. Man kann die Kugel von jeder Stelle an jede andere bewegen,
und dabei auch in jede beliebigen Richtung drehen, wenn man nur einen geeigneten Weg nimmt.
Leider ist dieses sehr anschauliche Beispiel noch etwas zu anspruchsvoll. Um eine rollende Kugel richtig
zu beschreiben, müssen wir zuerst die Drehbewegung eines starren Körpers verstehen. Wir werden uns
aber gleich ein ähnliches Beispiel anschauen, das auf dem Rad aus Abbildung 12.3 beruht. Zuerst wollen
wir jedoch die grundsätzlichen Eigenschaften solcher anholonomer Zwangsbedingungen diskutieren.
Der Ausgangspunkt der folgenden Überlegungen ist ein Konfigurationsraum Q, der entweder der ursprüngliche Konfigurationsraum eines N -Teilchen-Systems ist, oder der bereits reduzierte Konfigurationsraum eines Systems, nachdem wir alle holonomen Zwangsbedingungen eliminiert haben. Auf diesem
Raum sei ein beliebiges Koordinatensystem {q µ } eingeführt. Falls es sich um einen reduzierten Konfigurationsraum handelt, nennen wir die reduzierten Koordinaten jetzt also wieder q µ , um eine einheitliche
Notation zu bekommen.
Eine anholonome Zwangsbedingungen verbietet Bewegungen in bestimmte Richtungen. Sie stellt keine
Forderung an die Koordinaten q µ , schränkt aber die erlaubten Geschwindigkeiten q̇ µ ein. Befindet sich das
System zu einer Zeit t an einem Ort q ∈ Q, so ist seine Bewegungsfreiheit auf einen Untervektorraum von
TQ eingeschränkt. Dies kann an jeder Stelle q und zu jeder Zeit t ein anderer Untervektorraum sein.
Die Abbildung 12.7(a) zeigt eine grafische Darstellung einer solchen Zwangsbedingung. An jedem
Punkt q ∈ Q spannen die erlaubten Bewegungsrichtungen einen Untervektorraum auf. Diesen können
wir durch einen Satz von K linearen Gleichungen beschreiben, die die Geschwindigkeit q̇ ∈ TQ zu
erfüllen hat,
X kµ (q, t) q̇ µ = 0, mit k ∈ {1, . . . , K}.
(12.72)
Als einfachstes, wenn auch etwas unrealistisches Beispiel können wir uns vorstellen, dass es einem Teilchen nicht möglich ist, sich in eine bestimmte Raumrichtung zu bewegen, etwa in x-Richtung. Dann lautet
die Zwangsbedingung ganz einfach ẋ = 0, wenn x die entsprechende Koordinate dieses Teilchens ist.
Oder es ist zwei Teilchen nicht erlaubt, sich relativ zueinander zu bewegen. Dann hätten wir drei solche
Zwangsbedingungen, nämlich ẋ1 − ẋ2 = 0, ẏ1 − ẏ2 = 0 und ż1 − ż2 = 0.
86
Auf dem Konfigurationsraum Q lassen sich solche Einschränkungen an die Bewegungsrichtungen immer als ein lineares Gleichungssystem darstellen, das die Komponenten der Geschwindigkeiten q̇ µ zu
erfüllen haben. Die Koeffizienten in diesem Gleichungssystem sind die Größen X kµ in (12.72), die im
allgemeinen vom Ort q und von der Zeit t abhängen können. Wir können sie als einen Satz von K dualen
Vektorfeldern auf Q auffassen.
Eine anholonome Zwangsbedingung wird durch ein duales Vektorfeld auf dem Konfigurationsraum eines mechanischen System definiert. Sie verbietet Bewegungen in ein bestimmte
Richtung.
Um den Unterschied zwischen einer holonomen und einer anholonomen Zwangsbedingung deutlich zu
machen, betrachten wir noch einmal eine holonome Zwangsbedingung der Form C(q, t) = 0. Eine solche
Zwangsbedingung impliziert natürlich auch eine Einschränkung der möglichen Bewegungsrichtungen.
Leiten wir nämlich die gegebene Gleichung nach der Zeit ab, so ergibt sich X µ (q, t) q̇ µ = 0, mit Xµ =
∂C/∂q µ . Die Einschränkung der Bewegungsrichtung ist also genau von der Form (12.72).
Es gibt aber einen wesentlichen Unterschied. Im allgemeinen muss das duale Vektorfeld X µ , das eine
anholonome Zwangsbedingung Xµ q̇ µ = 0 definiert, nicht der Gradient irgendeiner skalaren Funktion C
sein. Was das bedeutet, wird in Abbildung 12.7(b) veranschaulicht. Nehmen wir an, wie befinden uns an
einer Stelle q1 ∈ Q im Konfigurationsraum. Ein zweiter Zustand q2 ∈ Q ist von dort aus auf dem direkten
Weg unerreichbar, weil wir dazu in eine verbotene Richtung gehen müssten.
Betrachten wir zuerst den Fall, dass Xµ = ∂C/∂q µ der Gradient einer skalaren Funktion ist. Dann ist
der Wert der Funktion C entlang jedes erlaubten Weges konstant. Denn genau das besagt die Gleichung
Xµ q̇ µ = ∂C/∂q µ q̇ µ = 0. Das System darf sich nur in solche Richtungen bewegen, in die die Funktion
C konstant ist, also eine verschwindende Richtungsableitung hat. Wenn zwei Konfigurationen q 1 und q2
entlang eines erlaubten Weges miteinander verbunden werden können, dann muss die Funktion C für beide
denselben Wert haben.
Umgekehrt, wenn die Funktion C für die beiden Konfigurationen q 1 und q2 verschiedene Werte hat,
dann können wir daraus unmittelbar schießen, dass sich das System niemals von q 1 nach q2 bewegen
kann. Es verbleibt immer in einem Unterraum mit C = konst. Liegt eine solche “scheinbar” anholonome
Zwangsbedingung vor, dann verhält sich das System wie bei einer entsprechenden holonomen Zwangsbedingung C − konst = 0, mit dem einzigen Unterschied, dass die Konstante beliebig vorgegeben werden
kann.
Wenn das Vektorfeld Xµ , das die Zwangsbedingung Xµ q̇ µ = 0 definiert, jedoch nicht der Gradient
irgendeiner skalaren Funktion zw ist, dann können wir dieses Argument nicht mehr anwenden. Dann ist es
im allgemeinen so, wie in Abbildung 12.7(b) gezeigt. Obwohl die zwei Konfigurationen q 1 und q2 nicht
auf dem direkten Weg miteinander verbunden werden können, gibt es einen Umweg, auf dem das System
doch von q1 nach q2 gelangen kann. In diesem Fall ist die Zwangsbedingung “echt” anholonom. Sie lässt
ich nicht als Zeitableitung einer holonomen Zwangsbedingung darstellen.
Wir werden für beide Fälle gleich ein Beispiel kennen lernen. Für die allgemeine Beschreibung von
anholonomen Zwangsbedingungen spielt es zunächst keine Rolle, ob es sich um “echt” oder “scheinbar”
anholonome Bedingungen handelt. Entscheidend ist nur, dass der Konfigurationsraum selbst nicht eingeschränkt wird, sondern nur die möglichen Bewegungsrichtungen.
Um die Bewegungsgleichungen zu formulieren, gehen wir von der d’Alembertschen Form aus, wobei
wir die Kräfte wieder in dynamische Kräfte und Zwangskräfte aufteilen,
d ∂T
∂T
= Fµ + Zµ .
µ −
dt ∂ q̇
∂q µ
(12.73)
Am Anfang dieses Kapitels hatten wir gezeigt, dass wir eine holonome Zwangsbedingung als Grenzfall
einer unendlich starken Potenzialkraft verstehen können. Analog gilt für eine anholonome Zwangsbedin87
gung, dass sie als Grenzfall einer unendlich starken Reibungskraft betrachtet werden kann. Eine Bewegung
in eine verbotene Richtung würde eine unendliche Kraft erfordern, um diese Reibung zu überwinden.
Wir wollen daher versuchen, die Zwangskraft Zµ erst als Reibungskraft darzustellen, um dann einen geeigneten Grenzwert zu bilden. Der Einfachheit halber soll zunächst nur eine Zwangsbedingung X ν q̇ ν = 0
vorliegen. Solange sich das System frei bewegen kann, ist Xν q̇ ν gerade die Geschwindigkeitskomponente
in die eigentlich verbotene Richtung. Die Reibungskraft Zµ soll daher proportional zu dieser Geschwindigkeit sein. Wir machen also für die Reibungskraft einen linearen Ansatz.
Eine weitere Bedingung an die Reibung ist, dass sie keine mechanische Leistung erbringt, wenn die
Bewegung des Systems in eine erlaubte Richtung erfolgt. Aus Xµ q̇ µ = 0 soll also Zµ q̇ µ = 0 folgen.
Das ist genau dann der Fall, wenn die dualen Vektoren Zµ und Xµ zueinander proportional sind. Die
Zwangsbedingung bestimmt also unmittelbar die Richtung der Zwangskraft. Beides zusammen impliziert
Zµ = −Λ Xµ Xν q̇ ν ,
(12.74)
wobei Λ wieder irgendeine große positive Zahl ist. Sie hat in diesem Fall die Bedeutung einer Reibungskonstanten. Das Vorzeichen ergibt sich aus der Forderung, dass die von der Reibungskraft erbrachte Leistung negativ sein muss, wenn sich das System in eine verbotene Richtung bewegt. Das ist genau dann der
Fall, wenn Λ > 0 ist, denn dann ist immer Zµ q̇ µ ≤ 0, und das Gleichheitszeichen gilt nur dann, wenn
Xµ q̇ µ = 0 ist, die Bewegung also in eine erlaubte Richtung erfolgt.
Liegen mehrere Zwangsbedingungen vor, so können wir analog den Ansatz machen, dass die Reibungskraft irgendeine lineare Funktion der verbotenen Geschwindigkeiten X kµ q̇ µ ist. Außerdem muss sie eine
Linearkombination der dualen Vektoren X kµ sein, denn nur dann verschwindet die erbrachte Leistung für
erlaubte Geschwindigkeiten. Das ergibt
X
Λkl X kµ X lν q̇ ν .
(12.75)
Zµ = −
k,l
Die K×K-Matrix Λkl muss wieder positiv sein, damit die von der Reibungskraft erbrachte Leistung Z µ q̇ µ
immer negativ ist, wenn eine Bewegung in eine verbotene Richtung erfolgt.
Der Rest des Argumentes ist genau dasselbe wie zuvor für die holonomen Zwangsbedingungen. Wir
bilden jetzt den Grenzwert, in dem die Einträge der Matrix Λkl , oder zumindest ihre Eigenwerte unendlich groß werden. Dann wird das System gezwungen, nur noch Bewegungen in erlaubte Richtungen auszuführen, weil Bewegungen in verbotene Richtungen unendlich schnell exponentiell abgebremst werden.
Der Ausdruck X lν q̇ ν in (12.75) geht dann gegen Null, und zwar so, dass die Zwangskraft Z µ endlich bleibt.
Nach dem Grenzübergang wissen nur noch, dass Zµ eine Linearkombination der dualen Vektoren X kµ
ist. Die Koeffizienten kennen aber nicht. Wir schreiben dafür wieder
X
Zµ = −
λk X kµ .
(12.76)
k
Die dualen Vektorfelder X kµ spielen hier offenbar dieselbe Rolle wie in (12.7) die Gradienten ∂C k /∂q µ
der holonomen Zwangsbedingungen. Die Analogie hatten wir schon weiter oben hergestellt. Wenn X kµ
die Gradienten von skalaren Funktionen C µ sind, dann sind die Zwangsbedingungen X kµ q̇ µ nur scheinbar
anholonom, und das System verhält sich ansonsten wir eines mit holonomen Zwangsbedingungen. Daher
steht auch in (12.76) der bekannte Ausdruck für die Zwangskraft.
Ebenfalls ganz analog zu den holonomen Zwangsbedingungen sind die Lagrange-Multiplikatoren λ k
wieder unbekannte Funktionen der Zeit. Sie ergeben sich erst aus den Bewegungsgleichungen
X
d ∂T
∂T
−
=
F
−
λk X kµ ,
µ
dt ∂ q̇ µ ∂q µ
k
88
X kµ q̇ µ = 0.
(12.77)
Anders als im Falle der holonomen Zwangsbedingungen lassen sich diese Gleichungen allerdings nicht
aus einer erweiterten Lagrange-Funktion ableiten, auch wenn die dynamischen Kräfte F µ Potenzialkräfte
sind. Der Grund dafür ist, dass es sich bei den Zwangskräften um Reibungskräfte handelt, und diese lassen
sich nicht aus einer Lagrange-Funktion ableiten.
Zusammenfassend ergibt sich daraus die folgende allgemeine Strategie zum Aufstellen der Bewegungsgleichungen für ein mechanisches System mit Zwangsbedingungen. Zuerst lösen wir die holonomen
e zu einem reduzierten KonfiguZwangsbedingungen, indem wir vom erweiterten Konfigurationsraum Q
rationsraum Q übergehen. Sind die holonomen Zwangsbedingungen zeitabhängig, so ist dieser Raum zu
e Die Dimension dieses Raumes ist die Anzahl der Freiheitsjeder Zeit t ein anderer Unterraum Qt von Q.
grade des System.
In jedem Fall können wir auf Q bzw. Qt ein Koordinatensystem {q µ } einführen, und die Energiefunktionen T und V, bzw. die Komponenten Fµ der dynamischen Kräfte als Funktionen der Koordinaten q µ , der
zugehörigen Geschwindigkeiten q̇ µ und der Zeit t darstellen. Dann müssen wir nur noch die anholonomen
Zwangsbedingung in die Bewegungsgleichungen einbauen, indem wir für jede solche Zwangsbedingung
X k = X kµ q̇ µ = 0 einen Lagrange-Multiplikator λk einführen, und eine entsprechende Zwangskraft λk X kµ
zu den Bewegungsgleichungen (12.77) hinzufügen.
Zusammen mit den Zwangsbedingungen selbst ergibt sich dann ein System von Differenzialgleichungen für die Funktionen q µ (t) und λk (t). Jedoch gehen die Multiplikatoren nur linear in diese Gleichungen
ein, so dass wir sie leicht eliminieren können, indem wir solche Linearkombinationen der Bewegungsgleichungen bilden, in denen sie verschwinden. Wir werden das gleich an einem Beispiel zeigen. Solange wir
nicht an den Zwangskräften interessiert sind, müssen wir nur die Bewegungsgleichungen für die Koordinatenfunktionen q µ (t) lösen.
Aufgabe 12.27 Ein N -Teilchen-System unterliege K holonomen und K 0 anholonomen Zwangsbedingungen. Man zeige, dass die Lösungen der Bewegungsgleichungen dann von 6 N − 2 K − K 0 unabhängigen
Parametern abhängen. Es müssen also 6 N − 2 K − K 0 Anfangsbedingungen festgelegt werden.
Das rollende Rad
Als anschauliches Beispiel für ein System mit anholonomen Zwangsbedingungen betrachten wir nun noch
einmal das Rad aus Abbildung 12.3. Seine Achse soll jetzt aber nicht fixiert sein, sondern es soll auf einer
ebenen Fläche rollen. Es könnte sich zum Beispiel um eine rollende Münze auf einem Tisch handeln. Um
das prinzipielle Vorgehen zuerst an einem sehr einfachen Fall zu erläutern, soll die Achse des Rades zwar
im Raum beweglich, aber fest ausgerichtet sein. Sie soll wie in Abbildung 12.3(a) stets in Richtung der
x-Achse zeigen.
Wieviele Freiheitsgrade hat dieses System? Wir haben natürlich wieder den Drehwinkel χ des Rades.
Außerdem können wir das Rad an eine beliebige Stelle auf dem Tisch platzieren. Das sind noch einmal
zwei Freiheitsgrade, denen wir die Koordinaten x und y zuordnen. Es sei also o + x e x + y ey der Punkt,
an dem das Rad auf der Fläche aufliegt. Insgesamt hat das System dann drei Freiheitsgrade (x, y, χ), also
einen dreidimensionalen reduzierten Konfigurationsraum Q.
Der Mittelpunkt des Rades befindet sich, da es nur aufrecht stehen kann, an der Stelle o + x e x + y ey +
R ez . Wenn wir wieder annehmen, dass die Masse des Rades auf den Rand konzentriert ist und aus N
gleichen Teilchen besteht, können wir mit dem bereits bekannten Trick auch hier die kinetische Energie
bestimmen. Das Teilchen mit der Nummer n befindet sich am Ort
2π n
.
(12.78)
rn = o + x ex + y ey + R sin χn ey + (1 − cos χn ) ez , mit χn = χ −
N
Die Geschwindigkeiten sind folglich
ṙn = ẋ ex + ẏ ey + R χ̇ cos χn ey + sin χn ez ,
89
(12.79)
Wenn wir davon die Quadrate bilden und über alle Teilchen summieren, erhalten wir
T =
1
1
1
M R2 χ̇2 + M ẋ2 + M ẏ 2 .
2
2
2
(12.80)
Eine Bewegung des Rades in x- oder y-Richtung trägt also gerade so viel zur Energie bei wie die Bewegung eines Körpers der Masse M , und die Rotationsenergie ist genau die, die wir auch für das fixierte Rad
gefunden hatten.
Aufgabe 12.28 Man verifiziere das Ergebnis (12.80). Warum muss man dazu wieder annehmen, dass die
Massen gleichmäßig über den Radkreis verteilt sind?
Aus (12.80) entnimmt man sofort, dass die Rotations- und Translationsbewegung des Rades entkoppeln,
wenn keine dynamischen Kräfte wirken. Allerdings haben wir noch gar nicht berücksichtigt, dass noch
eine weitere Zwangsbedingung vorliegt. Das Rad soll auf der Ebene rollen und nicht rutschen. Es darf
sich also nur in eine Richtung bewegen, die senkrecht zur Achse steht, und muss dabei auch tatsächlich
abrollen. Wenn es sich um einen Winkel α dreht, dann muss es dabei eine Strecke R α zurücklegen.
Eine solche Zwangsbedingung stellt offenbar eine Einschränkung an die Geschwindigkeiten, aber nicht
an die Orte dar. Sie ist deshalb nicht holonom. Um sie explizit aufzuschreiben, betrachten wir wieder
ein bestimmtes Teilchen auf der Lauffläche des Rades, und zwar das Teilchen, das gerade auf dem Tisch
aufliegt. Wenn das Rad nicht rutschen soll, dann darf sich dieses Teilchen in dem Moment, in dem es den
Tisch berührt, nicht bewegen.
Das Teilchen, dass gerade den Tisch berührt, hat natürlich wieder die Nummer n̄ = N χ/2π, und für
dieses Teilchen gilt χn̄ = 0. Die Geschwindigkeit dieses Teilchens ist laut (12.79)
ṙn̄ = ẋ ex + (ẏ + R χ̇) ey .
(12.81)
Somit lauten die zusätzlich zu stellenden Zwangsbedingungen
X 1 = ẋ = 0,
X 2 = ẏ + R χ̇ = 0.
(12.82)
Das Rad kann sich nicht in x-Richtung bewegen, und es rollt in y-Richtung genau in der Art, wie wir es
gerade beschrieben haben. Eine Änderung des Winkels um α kann nur gleichzeitig mit einer Bewegung
um −R α in y-Richtung erfolgen. Dass hier noch ein Minuszeichen auftritt liegt nur an der speziellen
Ausrichtung des Koordinatensystems und der willkürlichen Wahl der positiven Drehrichtung des Rades.
Die Zwangsbedingungen sind genau von der Form (12.72). Sie sind linear in den Geschwindigkeiten,
das heißt die schränken die Bewegungsrichtungen im Konfigurationsraum ein, aber sonst nichts. Von den
drei möglichen Richtungen, in denen sich das System “rollendes Rad” bewegen könnte, nämlich in x-,
y- oder χ-Richtung, ist nur eine zulässig, nämlich eine Rollbewegung in y-Richtung mit gleichzeitiger
Drehung in χ-Richtung.
Um die Bewegungsgleichungen aufzustellen, müssen wir nun die erweiterten d’Alembertschen Gleichungen (12.77) mit Zwangskräften verwenden. Da hier keine dynamischen Kräfte vorliegen, ist F µ = 0.
Es muss also gelten
d
dt
d
dt
∂T
∂T
−
= λ1 X 1x + λ2 X 2x
∂ ẋ
∂x
∂T
∂T
−
= λ1 X 1y + λ2 X 2y
∂ ẏ
∂y
⇒
M ẍ = λ1 ,
⇒
M ÿ = λ2 ,
d ∂T
∂T
−
= λ1 X 1χ + λ2 X 2χ
dt ∂ χ̇
∂χ
⇒
M R2 χ̈ = R λ2 .
90
(12.83)
Die Koeffizienten X kµ für k ∈ {1, 2} und µ ∈ {x, y, χ} haben wir aus (12.82) entnommen. Es sind die
Koeffizienten in den Zwangsbedingungen X k = X kµ q̇ µ .
Wir müssen jetzt ein Gleichungssystem für fünf unbekannte Funktionen lösen, nämlich die Ortskoordinaten x(t), y(t) und χ(t), und die beiden Lagrange-Multiplikatoren λ 1 (t) und λ2 (t). Wir haben aber auch
fünf Gleichungen, nämlich die Bewegungsgleichungen (12.83) und die Zwangsbedingungen (12.82). Zum
Glück sind sie sehr einfach. Wir können die Lösungen sofort angeben.
Aus der ersten Zwangsbedingung und der ersten Bewegungsgleichung folgt ẋ = 0 und λ 1 = 0. Es findet
keine Bewegung in x-Richtung statt, und es wirkt auch keine Zwangskraft in diese Richtung. Teilen wir die
dritte Bewegungsgleichung durch R und subtrahieren sie von der zweiten, so bekommen wir ÿ − R χ̈ =
0. Leiten wir die zweite Zwangsbedingung noch einmal nach t ab, so ergibt das ÿ + R χ̈ = 0. Beides
zusammen impliziert ÿ = 0 und χ̈ = 0, und schließlich mit folgt daraus auch λ 2 = 0. Zusammengefasst
ergibt sich die folgende allgemeine Lösung,
x(t) = x0 ,
y(t) = y0 − R ω t,
χ(t) = χ0 + ω t,
λ1 (t) = 0,
λ2 (t) = 0.
(12.84)
Das Rad rollt geradlinig mit konstanter Geschwindigkeit in Richtung der y-Achse, und es treten nie irgendwelche Zwangskräfte auf. Das liegt daran, dass das Rad diese Bewegung ohnehin ausführen würde, wenn
man die Anfangsbedingungen entsprechend wählt. Es bewegt sich als ganzes geradlinig und gleichförmig
und dreht sich mit konstanter Winkelgeschwindigkeit.
Entscheidend ist jedoch, dass die allgemeine Lösung der Bewegungsgleichungen nur von vier Parametern abhängt, nämlich x0 , y0 , χ0 und ω, obwohl der reduzierte Konfigurationsraum dreidimensional ist,
so dass ohne zusätzliche Zwangsbedingungen sechs Anfangsbedingungen zu wählen wären, nämlich drei
Orte und drei Geschwindigkeiten. Anholonome Zwangsbedingungen schränken zwar die Orte nicht ein,
aber die Geschwindigkeiten und somit auch die wählbaren Anfangsbedingungen.
Aufgabe 12.29 Wie man leicht in (12.82) sieht, lassen sich diese beiden Zwangsbedingungen als totale Zeitableitungen von zwei Funktionen schreiben, nämlich X 1 = dx/dt und X 2 = d(y + R χ)/dt.
Die Zwangsbedingungen sind also nur scheinbar anholonom. Worin besteht jedoch der wesentliche Unterschied zwischen den hier gestellten Bedingungen und der alternativen Beschreibung eines rollenden
Rades durch holonome Zwangsbedingungen C 1 = x und C 2 = y + R χ?
Nun war dieses System ein sehr einfaches, und das Ergebnis war auch genau das erwartete. Das Rad rollt,
wie in Abbildung 12.8(a) gezeigt, einfach geradeaus über den Tisch. Im nächsten Schritt führen wir wieder
einen zusätzlichen Freiheitsgrad ein und erlauben dem Rad, seine Achse zu drehen, aber nicht zu kippen.
Wie wir gleich sehen werden, führt ein solches Rad eine interessante Bewegung aus, die man vielleicht
nicht sofort erwartet.
Der reduzierte Konfigurationsraum des Systems ist jetzt vierdimensional und wird durch die Koordinaten (x, y, ϕ, χ) beschrieben, wobei der Winkel ϕ wieder die Ausrichtung der Achse ist.
Aufgabe 12.30 Die Herleitung der kinetischen Energie erfolgt wie oben. Man zeige, dass sich die Summe
aus der Rotationsenergie (12.46) und der Translationsenergie eines K örpers der Masse M ergibt, also
T =
1
1
1
1
M R2 χ̇2 + M R2 ϕ̇2 + M ẋ2 + M ẏ 2 .
2
4
2
2
(12.85)
Auf den ersten Blick sind die vier Bewegungsrichtungen wieder entkoppelt. Aber wir müssen natürlich
noch die Zwangsbedingungen berücksichtigen, die dafür sorgen, dass das Rad rollt und nicht rutscht. Wir
betrachten dazu wieder die Geschwindigkeit des Teilchens mit der Nummer n̄ = N χ/2π, das gerade den
Tisch berührt, und verlangen, dass diese verschwindet. Um die neue Ausrichtung der Achse zu berücksichtigen, müssen wir wieder ey durch e0 (ϕ) ersetzen. Es ist jetzt
ṙn̄ = ẋ ex + ẏ ey + R χ̇ e0 (ϕ).
91
(12.86)
replacements
(d)
(b)
(a)
(c)
Abbildung 12.8: Das Rad aus Abbildung 12.3 rollt auf einem Tisch. Je nach der Zahl der Freiheitsgrade
kann es entweder nur geradeaus laufen, aufrecht um eine Kurve fahren, oder dabei auch noch kippen.
Komponentenweise aufgeschrieben ergeben sich die Zwangsbedingungen
X 1 = ẋ − R sin ϕ χ̇ = 0,
X 2 = ẏ + R cos ϕ χ̇ = 0.
(12.87)
Anschaulich interpretiert besagen diese Gleichungen, dass sich das Rad in der x-y-Ebene nur in die Richtung bewegen darf, die senkrecht zur momentanen Ausrichtung ϕ der Achse steht, und dass es dabei
abrollt, also bei einem Drehwinkel α die Strecke R α zurücklegt.
Das Aufstellen der Bewegungsgleichungen erfolgt wie oben, nur dass wir jetzt eine mehr bekommen,
d
dt
d
dt
∂T
∂T
−
= λ1 X 1x + λ2 X 2x
∂ ẋ
∂x
∂T
∂T
−
= λ1 X 1y + λ2 X 2y
∂ ẏ
∂y
⇒
M ẍ = λ1 ,
⇒
M ÿ = λ2 ,
d ∂T
∂T
−
= λ1 X 1χ + λ2 X 2χ
dt ∂ χ̇
∂χ
⇒
M R2 χ̈ = R (λ2 cos ϕ − λ1 sin ϕ),
∂T
d ∂T
−
= λ1 X 1ϕ + λ2 X 2ϕ
dt ∂ ϕ̇
∂ϕ
⇒
M R2 ϕ̈ = 0.
(12.88)
Auch hier haben wir die Koeffizienten X kµ für k ∈ {1, 2} und µ ∈ {x, y, χ, ϕ} wieder aus der expliziten
Darstellung (12.87) der Zwangsbedingungen C k = X kµ q̇ µ abgelesen.
Die letzte Bewegungsgleichung für ϕ(t) können wir sofort lösen. Es ist
ϕ̈ = 0
⇒
ϕ(t) = ϕ0 + γ t,
(12.89)
wobei γ und ϕ0 Integrationskonstanten sind. Die Achse des Rades dreht sich gleichmäßig mit einer beliebigen Winkelgeschwindigkeit γ. Die Konstante ϕ0 ist die Ausrichtung der Achse zur Zeit t = 0. Wir
können ohne Beschränkung der Allgemeinheit ϕ0 = 0 setzen, wenn wir das Koordinatensystem entsprechend anpassen.
Aus den restlichen Bewegungsgleichungen lassen sich die Multiplikatoren eliminieren. Wir setzen dazu
die ersten beiden Gleichungen in die dritte ein und erhalten
R χ̈ = ÿ cos(γ t) − ẍ sin(γ t).
(12.90)
Andererseits folgt aus den Zwangsbedingungen, wenn wir die gefundene Lösung für ϕ einsetzen und diese
dann nach der Zeit ableiten,
ẍ = R γ cos(γ t) χ̇ + R sin(γ t) χ̈,
ÿ = R γ sin(γ t) χ̇ − R cos(γ t) χ̈.
92
(12.91)
Setzen wir das in die letzte Gleichung ein, so finden wir R χ̈ = −R χ̈, also
χ̈ = 0
⇒
χ(t) = χ0 + ω t.
(12.92)
Das Rad rotiert mit einer ebenfalls konstanten Winkelgeschwindigkeit ω um seine Achse. Da χ 0 wieder
nur die Stellung des Rades zur Zeit t = 0 repräsentiert, können wir auch diese Integrationskonstante ohne
Beschränkung der Allgemeinheit gleich Null setzen.
Damit ist schon anschaulich klar, wie sich das Rad bewegt. Es rollt mit konstanter Geschwindigkeit über
die Ebene, jedoch nicht geradeaus, sondern im Kreis, denn es verändert kontinuierlich die Richtung seiner Bewegung. Tatsächlich folgt das auch aus den Bewegungsgleichungen. Aus den Zwangsbedingungen
ergibt sich nämlich jetzt
ẋ = R ω sin(γ t),
⇒
ẏ = −R ω cos(γ t)
x(t) = x0 +
Rω
(1 − cos(γ t)),
γ
y(t) = y0 −
Rω
sin(γ t).
γ
(12.93)
Das Rad läuft auf einem Kreis mit dem Radius R ω/γ mit der Kreisfrequenz γ um, wobei es mit der
Winkelgeschwindigkeit ω rotiert. Der Anfangspunkt (x0 , y0 ) in der Ebene kann frei gewählt werden. Der
erste Teil dieser Bewegung ist in Abbildung 12.3(b) dargestellt.
Aufgabe 12.31 Man bestimme für die hier ermittelte Bewegung die Komponenten Zx , Zy , Zϕ und Zχ der
Zwangskraft und zeige, dass die Komponenten Zx und Zy gerade die Zentripetalkraft ergeben, die benötigt
wird, um einen Körper der Masse M auf die Kreisbahn zu zwingen.
Aufgabe 12.32 Man zeige, dass die Zwangsbedingungen jetzt echt anholonom sind. Die Funktionen X k
in (12.87) lassen sich nicht als Zeitableitungen von holonomen Zwangsbedingungen darstellen. Ist es
möglich, jeden Punkt des Konfigurationsraumes mit jedem anderen auf einem erlaubten Weg zu verbinden?
Was bedeutet das anschaulich?
Aufgabe 12.33 Das rollende Rad in Abbildung 12.8(c) kann auch kippen. Es sei wieder (x, y) der Auflagepunkt, und (ϑ, ϕ, χ) seien die Winkelkoordinaten, wie sie in Abbildung 12.3 definiert sind. Man stelle
die Orte der Teilchen als Funktion dieser fünf Koordinaten dar, berechne daraus die Lagrange-Funktion
und stelle die Bewegungsgleichungen auf. Wie lauten nun die Zwangsbedingungen, wenn das Rad wieder
nur rollen, aber nicht rutschen soll?
Aufgabe 12.34 Zuletzt lassen sich auch noch Reibungskräfte einbeziehen. Man kann zwischen Rollreibung, Drehreibung und Kippreibung unterscheiden, entsprechend den drei Richtungen, in die das Rad
rollt, sich dreht bzw. kippt. Man kann für diese Kräfte den linearen Ansatz
Fx = 0,
Fy = 0,
Fχ = −ηroll χ̇,
Fϕ = −ηdreh ϕ̇,
Fϑ = −ηkipp ϑ̇
(12.94)
machen. In einer realistischen Situation, etwa einer rollenden M ünze auf einem Tisch, sind alle drei Reibungskonstanten etwa gleich groß. Man füge die Reibungskräfte in die Bewegungsgleichungen ein, eliminiere die Multiplikatoren, und löse die Gleichungen dann nach den Beschleunigungen auf. In dieser
Form lassen sie sich numerisch integrieren, wobei als Anfangsbedingungen f ünf Koordinaten (x, y, ϑ, ϕ, χ)
und drei Geschwindigkeiten (ϑ̇, ϕ̇, χ̇) vorgegeben werden können. Man studiere anhand der numerischen
Lösungen das typische Verhalten einer rollenden Münze auf einem Tisch.
93
13 Mannigfaltigkeiten
Im letzten Kapitel haben wir gezeigt, dass sich mechanische System mit holonomen Zwangsbedingungen sehr leicht beschreiben lassen, wenn man den reduzierten Konfigurationraum einführt. Es genügt,
alle für die Dynamik relevanten Größen, also die kinetische und die potenzielle Energie bzw. die nichtkonservativen Kräfte, nur auf diesem Unterraum zu kennen. Wir können daher den reduzierten Konfigurationsraum auch als den eigentlichen Konfigurationsraum betrachten. Dass es sich um eine Teilmenge eines
größeren Raumes handelt, spielt für die Dynamik des Systems gar keine Rolle.
Dabei tritt nur ein Problem auf. Der reduzierte Konfigurationsraum ist im allgemeinen kein affiner
Raum. Der reduzierte Konfigurationsraum eines Pendels ist eine Kugeloberfläche. Beim Rad aus Abbildung 12.3 oder 12.8 hängt die Struktur dieses Raumes davon ab, wieviel Bewegungsfreiheit das Rad hat.
Es stellt sich daher die folgende Frage. Wenn wir nur noch den reduzierten Konfigurationsraum als den
Raum betrachten, in dem die Dynamik stattfindet, können wir dann überhaupt noch die ganzen Methoden
verwenden, die wir uns im Zusammenhang mit affinen Räumen und Vektorräumen erarbeitet haben? Ist
es dann überhaupt noch sinnvoll, über die Geschwindigkeit als Vektor, oder die Kraft als dualen Vektor zu
sprechen?
Offenbar haben wir es irgendwie geschafft, die Bewegungsgleichungen so zu formulieren, dass wir
dazu nur noch die Koordinaten auf dem reduzierten Konfigurationsraum benötigen. Formal sahen die
d’Alembertschen oder Lagrangeschen Gleichung sogar genau so aus wie die ursprünglichen Gleichungen
auf dem Konfigurationsraum eines N -Teilchen-Systems ohne Zwangsbedingungen, der ja immer ein affiner Raum ist. Wir wollen nun etwas genauer untersuchen, welche mathematischen Strukturen hinter dieser
Formulierung der Bewegungsgleichungen stehen.
Karten und Koordinaten
Wie lässt sich eine Kugeloberfläche beschreiben, ohne sie in einen dreidimensionalen Raum einzubetten?
Die Antwort auf diese Frage steht in vielen Bücherregalen und heißt Atlas. Ein Atlas ist eine Sammlung
von Karten, die jeweils einen Teil der Erdoberfläche auf ein zweidimensionales Blatt Papier abbilden.
Jeder Ort auf der Erdoberfläche ist mindestens in einer Karte dargestellt. Manche Orte erscheinen auf
mehreren Karten. Die Karten überlappen. Erst dadurch lässt sich die Erdoberfläche als ganzes aus den
einzelnen Karten rekonstruieren.
Warum lässt sich die Erdoberfläche auf diese Art und Weise beschreiben? Offenbar, weil kleine Stücke
dieser Oberfläche so ähnlich aussehen wie Teilmengen des R2 . Sie lassen sich auf einer Buchseite mehr
oder weniger treu darstellen. Als ganzes ist die Erdoberfläche aber keine Teilmenge des R 2 . Deshalb ist es
nicht möglich, sie als ganzes mit nur einer Karte zu erfassen. Wenn wir beliebige Verzerrungen, also nicht
maßstabsgetreue Karten zulassen, dann benötigen wir mindestens zwei Karten.
In Abbildung 13.1 wird ein Atlas der Kugeloberfläche konstruiert, der aus genau zwei Karten besteht.
Wir definieren die Kugeloberfläche zunächst als Teilmenge des R 3 ,
S2 = {
(x, y, z) ∈ R3 ,
x2 + y 2 + z 2 = 1 }.
(13.1)
Die übliche Bezeichnung S2 für die Kugeloberfläche leitet sich aus der allgemeineren Definition einer
N -dimensionalen Sphäre SN her, die entsprechend als Teilmenge des RN +1 dargestellt werden kann,
SN = { (x0 , . . . , xN ) ∈ RN +1 ,
x0 2 + · · · + xN 2 = 1 }.
(13.2)
Alle folgenden Überlegungen lassen sich auch für die N -dimensionale Sphäre durchführen. Der Anschaulichkeit halber bleiben wir jedoch bei der vertrauten, zweidimensionalen Sphäre.
Um eine spezielle Karte zu konstruieren, betrachten wir die Ebene, die die Sphäre am S üdpol, also am
Punkt (0, 0, −1) ∈ S2 berührt. Wir stellen uns vor, dass diese Ebene eine Einbettung des R 2 in den R3
94
replacements
(u(N) , v(N) )
(c)
(d)
(x, y, z)
(u(S) , v(S) )
(u, v)
(a)
(b)
Abbildung 13.1: Eine Karte der Sphäre einsteht, indem man sie stereografisch vom Nordpol aus auf eine
Ebene projiziert (a). Durch zwei solche Karten entsteht ein Atlas, der die gesamte Sphäre abdeckt (b).
Die Punkte in der Nähe des Äquators werden von beiden Karten erfasst, die Polregionen nur von jeweils
einer.
ist, die durch die Abbildung R2 → R3 : (u, v) 7→ (2 u, −2 v, −1) gegeben ist. Den Faktor 2 und das
Minuszeichen führen wir an dieser Stelle nur ein, um die späteren Rechnungen ein wenig zu vereinfachen,
und um den Koordinatensystemen die richtigen Orientierungen zu geben. Es handelt sich um eine reine
Konvention, die keine prinzipielle Bedeutung hat. Der Punkt in der Ebene mit den Koordinaten (u, v) ∈ R 2
soll im Raum an der Stelle (2 u, −2 v, −1) ∈ R3 liegen.
Verbinden wir nun einen Punkt (u, v) in der Ebene durch eine Gerade mit dem Nordpol (0, 0, 1) ∈ S 2 ,
so schneidet die Gerade die Sphäre noch in genau einem anderen Punkt (x, y, z) ∈ S 2 . Auf diese Weise
wird eine Abbildung von der Ebene auf die Sphäre definiert. Die Umkehrung dieser Abbildung hießt
stereografische Projektion der Sphäre auf die Ebene. Eine kurze Rechnung ergibt, dass die Abbildung wie
folgt explizit dargestellt werden kann,
Σ(S) :
2
2
R →S ,
(u, v)
7→
2u
2v
1 − u2 − v 2 ,−
,−
.
1 + u2 + v 2
1 + u2 + v 2
1 + u2 + v 2
(13.3)
Entscheidend ist nun nicht, wie diese Abbildung konstruiert wurde, sondern dass es sich um eine Abbildung der Ebene R2 auf die Sphäre S2 handelt. Wir können mit der Abbildung Σ(S) eine Karte anfertigen,
die wir Süd-Karte nennen. Sie erfasst die gesamte Südhalbkugel und ein kleines Stück der Nordhalbkugel nördlich des Äquators. Tatsächlich könnten wir sogar die gesamte Nordhalbkugel mit Ausnahme des
Nordpols erfassen. Die Karte wäre dann unendlich groß. Das ist aber gar nicht nötig. Es genügt, dass die
Karte etwas über den Äquator hinaus reicht.
Eine zweite Karte stellen wir auf die gleiche Weise her, indem wir diesmal vom Südpol aus auf eine
Ebene projizieren, die die Kugel am Nordpol berührt. Die entsprechende Abbildung für die Nord-Karte
lautet
2v
1 − u2 − v 2 2u
2
2
.
(13.4)
,
,
Σ(N) : R → S , (u, v) 7→
1 + u2 + v 2 1 + u2 + v 2 1 + u2 + v 2
Ist die Sphäre S2 die Erdoberfläche, so ergeben sich die in Abbildung 13.2 dargestellten Karten, die jeweils
etwas mehr als eine Halbkugel erfassen. Beide Karten haben die Eigenschaft, dass der jeweilige Pol in der
Mitte der Karte an der Stelle (u, v) = (0, 0) liegt, und der Äquator durch den Einheitskreis u2 + v 2 = 1
dargestellt wird. Das ist der Grund für die oben gewählte Normierung der Koordinaten. Außerdem sehen
wir, dass beide Karten die gleiche Orientierung haben, also die Erdteile so dargestellt werden, wie sie “von
oben” aussehen. Dafür war das eine Minuszeichen in (13.3) nötig.
95
replacements
(a)
(b)
(c)
(d)
Abbildung 13.2: Ein einfacher Atlas der Erdoberfläche besteht aus zwei Karten, die jeweils etwas mehr als
eine Halbkugel überdecken. Die speziellen hier gezeigten Karten ergeben sich durch die stereografischen
Projektionen aus Abbildung 13.1. Die Pole befinden sich jeweils in der Kartenmitte, und der Äquator wird
durch einen Kreis dargestellt. Die gestrichelte Linie begrenzt das Überlappgebiet der beiden Karten.
Nun betrachten wir einen Ort in der Nähe des Äquators, der von beiden Karten erfasst wird. Er erscheint
natürlich in der einen Karte an einer anderen Stelle als in der anderen. In der Nord-Karte hat der Ort die
Koordinaten (u(N) , v(N) ), in der Süd-Karte erscheint derselbe Ort an der Stelle (u(S) , v(S) ). Welcher Zusammenhang besteht zwischen diesen Koordinaten? Er lässt sich aus (13.3) und (13.4) durch Gleichsetzen und
Auflösen nach (u(N) , v(N) ) bzw. (u(S) , v(S) ) ablesen. Man findet
u(S) =
oder umgekehrt
u(N) =
u(N)
,
u(N)2 + v(N)2
v(S) = −
u(S)
,
+ v(S)2
v(N) = −
u(S)2
v(N)
,
u(N)2 + v(N)2
(13.5)
v(S)
.
+ v(S)2
(13.6)
u(S)2
Da die beiden Karten auf die gleiche Art und Weise hergestellt wurden, ist der Zusammenhang zwischen
(u(N) , v(N) ) und (u(S) , v(S) ) symmetrisch.
Mit den beiden Karten können wir uns nun ein Bild von der Kugeloberfläche machen, ohne sie dafür in
den dreidimensionalen Raum einbetten zu müssen. Wir wissen nämlich jetzt, wie wir die beiden Karten
zusammensetzen müssen, um die Sphäre als ganzes zu erfassen. Wir müssen dazu die Orte in der Nähe
des Äquators, die auf beiden Karten dargestellt sind, mit Hilfe der Übergangsfunktionen (13.5) bzw. (13.6)
identifizieren. Ein Punkt, der in der Nord-Karte die Koordinaten (u (N) , v(N) ) hat, repräsentiert denselben
Ort auf der Kugelkoberfläche wie ein Punkt, der in der Süd-Karte die Koordinaten (u (S) , v(S) ) hat, wenn
zwischen diesen Koordinaten der durch die Übergangsfunktionen definierte Zusammenhang besteht.
Die Übergangsfunktionen sagen uns, anschaulich formuliert, wie wir die beiden flachen Karten zusammenkleben müssen, um einen Globus zu bekommen. Den können wir nicht mehr auf ein flaches Blatt
Papier zeichnen. Entscheidend ist jedoch, dass in der Übergangsfunktionen die vollständige Bauanleitung
96
für den Globus enthalten ist, also letztlich die Information, die wir benötigen, um aus den lokalen Karten
die globale Struktur der Kugeloberfläche zu rekonstruieren.
An dieser Stelle können wir die ursprüngliche Definition (13.1) der Sphäre S 2 als Teilmenge des R3
vergessen. Die Sphäre ist ein zweidimensionales Objekt. Sie existiert unabhängig von ihrer Einbettung in
den dreidimensionalen Raum. Sie wird allein durch die beiden Karten und die Übergangsfunktion (13.1)
bereits vollständig beschrieben. Um die Struktur der Sphäre zu verstehen, müssen wir nicht wissen, ob
und wie diese in einen größeren Raum eingebettet ist. Das ist die Idee, die hinter dem Konzept einer
Mannigfaltigkeit steht, das wir gleich allgemein einführen werden.
Aufgabe 13.1 Man zeige, dass die Umkehrungen der Abbildungen (13.3) und (13.4) wie folgt dargestellt
werden können,
x
y ,
S2 → R 2 ,
(x, y, z) 7→
Σ −1
,
(S) :
1−z z−1
x
y −1
,
Σ (N) : S2 → R2 ,
(x, y, z) 7→
.
(13.7)
1+z z+1
Daraus lässt sich leicht ablesen, dass es sich tatsächlich um die in Abbildung 13.1 konstruierte stereografische Projektion handelt, und es lassen sich schließlich auch die Übergangsfunktionen (13.5) und (13.6)
bestimmen.
Aufgabe 13.2 Wir führen komplexe Koordinaten w(N) = u(N) + i v(N) und w(S) = u(S) + i v(S) ein. Welcher
sehr einfache Zusammenhang zwischen w(N) und w(S) ergibt sich dann aus den Übergangsfunktionen
(13.5) und (13.6)?
Aufgabe 13.3 Man zeige, dass der Rand der Nord-Karte in Abbildung 13.2 links in der S üd-Karte rechts
durch eine aus vier Halbkreisen zusammengesetzte Kurve dargestellt wird. Dazu gen ügt es im wesentlichen, zu zeigen, dass eine Gerade u(N) = konst bzw. v(N) = konst in der Nord-Karte durch einen Kreis in
der Süd-Karte dargestellt wird, der durch den Südpol verläuft, und dessen Mittelpunkt auf der v(S) - bzw.
u(S) -Achse liegt.
Aufgabe 13.4 Natürlich gibt es noch viele andere Möglichkeiten, die Kugeloberfläche mit Karten zu überdecken. Zum Beispiel könnte man jeweils eine Halbkugel orthogonal auf die Koordinatenebenen im R 3
projizieren. Es ergeben sich dann sechs kreisrunde Karten, wobei eine Karte jeweils mit vier anderen
überlappt. Tatsächlich findet man solche Karten nicht selten in alten Atlanten. Man bestimme hierf ür die
Übergangsfunktionen.
Aufgabe 13.5 Die üblichen Kugelkoordinaten (ϑ, ϕ) definieren ebenfalls eine Karte. Sie deckt fast die
gesamte Kugeloberfläche ab, mit Ausnahme der beiden Pole. Um einen kompletten Atlas zu bekommen,
muss man noch zwei Karten hinzufügen, die jeweils die Polregionen abdecken. Auch solche Darstellungen
der Erdoberfläche findet man oft in Atlanten. Zusätzlich zu einer rechteckigen Karte, in der die Längenund Breitengrade durch Geraden dargestellt werden, sind die Polregionen in zwei kleineren, runden Karten
dargestellt. Man kann dort die oben definierten Koordinaten (u (N) , v(N) ) für das Nordpolargebiet und
(u(S) , v(S) ) für das Südpolargebiet verwenden. Man zeige, dass dann die Übergangsfunktionen zu den
Kugelkoordinaten wie folgt gegeben sind. In der Nord-Karte gilt
u(N) = tan(ϑ/2) cos ϕ,
v(N) = tan(ϑ/2) sin ϕ,
(13.8)
v(S) = − cot(ϑ/2) sin ϕ.
(13.9)
und in der Süd-Karte
u(S) = cot(ϑ/2) cos ϕ,
Aufgabe 13.6 Man konstruiere mit Hilfe einer entsprechenden stereografischen Projektion zwei Karten,
die eine N -dimensionale Sphäre SN abdecken, und bestimme die zugehörige Übergangsfunktion.
97
Differenzierbare Mannigfaltigkeiten
Die Idee, eine Sphäre unabhängig von ihrer Einbettung in einen höherdimensionalen Raum durch geschicktes Zusammenkleben von einzelnen Karten zu beschreiben, lässt sich nun sehr leicht verallgemeinern. Dies führt auf das Konzept einer differenzierbaren oder glatten Mannigfaltigkeit. Im Prinzip kennen
wir bereits alle dafür nötigen Bausteine. Etwas verkürzt lässt sich die Definition wie folgt zusammenfassen:
Eine Mannigfaltigkeit ist eine Punktmenge, die durch einen Atlas beschrieben wird. Ein Atlas
besteht aus einer Sammlung von Karten und Übergangsfunktionen zwischen ihnen.
Eine Punktmenge M ist einfach eine Menge, deren Elemente x, y, . . . ∈ M wir Punkte nennen. Man
setzt üblicherweise voraus, dass diese Menge bereits gewisse mathematische Strukturen hat. Es soll sich
sich um einen topologischen Raum handeln. Eine Punktmenge ist ein topologischer Raum, wenn in ihr
offene und abgeschlossene Teilmengen definiert sind, die im wesentlichen die gleichen Eigenschaften
haben wie die offenen und abgeschlossenen Teilmengen des R N . In einem topologischen Raum kann man
die Konvergenz von Folgen und die Stetigkeit von Abbildungen definieren.
Allerdings ist diese Voraussetzung nicht wesentlich, so dass wir nicht weiter auf diese Details eingehen
werden. Entscheidend ist vielmehr, dass sich gewisse Teilmengen der Mannigfaltigkeit bijektiv auf Teilmengen des RN abbilden lassen, was anschaulich in etwa bedeutet, dass die Mannigfaltigkeit lokal, also
in der Umgebung jedes Punktes, so ähnlich aussieht wie der R N . Die Zahl N = dim M nennt man dann
die Dimension von M. Das ist die wesentliche Eigenschaft einer Mannigfaltigkeit, die wir im folgenden
genauer beschreiben werden.
Der entscheidende Begriff ist der einer Karte. Eine Karte besteht aus einer offenen Teilmenge U (m) ⊂
N
R und einer Koordinatenabbildung Σ(m) , die die Teilmenge U(m) ⊂ RN bijektiv auf eine Teilmenge
M(m) ⊂ M abbildet,
Karte
Σ(m) :
U(m) ⊂ RN
→
M(m) ⊂ M,
{x(m)µ } 7→ x.
(13.10)
Innerhalb der Karte U(m) bzw. ihren Bild M(m) gibt es eine umkehrbar eindeutige Zuordnung zwischen
den Punkten x auf M und ihren Koordinaten {x(m)µ } im RN . Das ist völlig analog zu einer Koordinatenabbildung (10.38) für ein krummliniges Koordinatensystem auf einem affinen Raum zu verstehen. Eine
Karte ist also im Prinzip nichts anderes als ein krummliniges Koordinatensystem, das im allgemeinen nur
einen Teil des betrachteten Raumes abdeckt.
Wenn man voraussetzt, dass M bereits ein topologischer Raum ist, dann muss sowohl die Koordinatenabbildung als auch deren Umkehrung stetig sein. Das Bild M(n) der Karte ist dann ebenfalls eine offene
Teilmenge von M. Macht man diese Voraussetzung nicht, so kann man die Koordinatenabbildung dazu
benutzen, die Topologie von M zu definieren. Das sind aber mathematische Spitzfindigkeiten, auf die wir
hier nicht weiter eingehen werden.
Um die Mannigfaltigkeit als ganzes zu beschreiben, benötigen wir mehrere Karten. Ein Atlas ist eine
Sammlung von Karten U(m) mit den zugehörigen Koordinatenabbildungen Σ(m) , wobei der Index (m)
irgendeine Indexmenge durchläuft. Jeder Punkt in M muss von mindestens einer Karte erfasst werden.
Die Vereinigung aller Bilder M(m) ⊂ M ist folglich ganz M,
[
M=
M(m) .
(13.11)
(m)
Wenn wir uns einen Atlas als Buch vorstellen, dann ist der Index (m) die Seitennummer, und die Koordinaten {x(m)µ } ∈ RN eines Ortes x ∈ M(m) geben an, wo dieser Ort auf der Seite (m) verzeichnet ist. Zur
besseren Unterscheidung hängen wir auch den Koordinaten {x (m)µ } den Kartenindex (m) an. So können
98
replacements
(a)
(b)
(c)
(d)
U(m,n)
Σ −1
(n) ◦ Σ(m)
U(m)
U(n)
U(n,m)
Σ(m)
Σ(n)
M(n)
M(m)
M
Abbildung 13.3: Karten und Übergangsfunktionen auf einer Mannigfaltigkeit M. Jede Karte deckt eine
Teilmenge von M ab, indem sie eine Teilmenge des R N bijektiv auf diese abbildet. Das Überlappgebiet von zwei Karten wird von beiden Karten erfasst. Die Übergangsfunktion, die die Koordinaten eines
Punktes in der einen Karte auf die Koordinaten desselben Punktes in der anderen Karte abbildet, ist eine
beliebig oft differenzierbare Abbildung R N → RN .
wir für alle Karten dieselben Koordinatenindizes µ, ν, . . . verwenden, um die N einzelnen Koordinaten zu
unterscheiden. Wir müssen uns nicht für jede Karte andere Bezeichnungen und eine andere Indexmenge
für die einzelnen Koordinaten ausdenken.
Für die zweidimensionale Sphäre sind wir genau so vorgegangen. Wir haben zwei Karten konstruiert,
die wir durch die Indizes (N) und (S) unterschieden haben. In beiden Karten haben wir die Koordinaten
mit u und v bezeichnet, das heißt der Koordinatenindex µ nahm in diesem Fall die Werte u und v an. Im
deutlich zu machen, auf welche der beiden Karten wir uns beziehen, haben wir die Koordinaten zusätzlich
mit Kartenindizes versehen, also mit (u(N) , v(N) ) bzw. (u(S) , v(S) ) bezeichnet.
Überschneiden sich nun zwei Karten, so können wir einem Ort x ∈ M (m) ∩ M(n) in der Schnittmenge
zwei Sätze von Koordinaten zuordnen, nämlich die Koordinaten {x (m)µ } in der Karte U(m) und die Koordinaten {x(n)µ } in der Karte U(n) . Derselbe Ort ist sowohl auf der Seite (m) als auch auf der Seite (n) im Atlas
verzeichnet. Die Abbildung, die den Koordinaten {x(m)µ } in der einen Karte die Koordinaten {x(n)µ } in
der anderen Karte zuordnet, heißt Übergangsfunktion. Die Übergangsfunktion beschreibt das Umrechnen
von einem Koordinatensystem in ein anderes im Überlappgebiet von zwei Karten.
Die Abbildung 13.3 zeigt die typische Situation. Unten ist die Mannigfaltigkeit M dargestellt, oben
zwei Karten, also zwei Teilmengen U(m) und U(n) des RN , die durch bijektive Abbildungen Σ(m) bzw. Σ(n)
auf die Teilmengen M(m) und M(n) von M abgebildet werden. Die Schnittmenge M(m) ∩ M(n) wird
von beiden Karten erfasst. In der Karte Σ(m) erscheint das Überlappgebiet als Teilmenge U(m,n) ⊂ U(m) .
In der Karte Σ(n) wird dasselbe Gebiet durch die Teilmenge U(n,m) ⊂ U(n) repräsentiert. Mit der üblichen
Schreibweise für Mengen und Abbildungen ist
−1
−1
U(m,n) = Σ (m) M(m) ∩ M(n) ,
U(n,m) = Σ (n) M(m) ∩ M(n) .
(13.12)
Das sind die in der Abbildung 13.3 oben schattiert dargestellten Teilmengen der beiden Karten. Die Übergangsfunktion ist eine Abbildung zwischen diesen beiden Teilmengen des R N . Sie lässt sich wie folgt aus
99
den Koordinatenabbildungen zusammensetzen,
ÜbergangsFunktion
Σ −1
(n) ◦ Σ(m) :
U(m,n) → U(n,m) ,
{x(m)µ } 7→ {x(n)µ }.
(13.13)
Wir bilden zuerst die Koordinaten {x(m)µ } in der einen Karte auf den zugehörigen Punkt x ∈ M ab, und
diesen dann auf seine Koordinaten {x(n)µ } in der anderen Karte.
Der entscheidende Punkt ist nun, dass es sich bei den Übergangsfunktionen um Abbildungen zwischen
zwei offenen Teilmengen des RN handelt. Da nämlich die Schnittmenge M(m) ∩ M(n) von zwei offenen
Mengen wieder offen ist, und die Koordinatenabbildungen in beide Richtungen stetig sind, sind auch die
beiden Urbilder der Schnittmenge M(m) ∩ M(n) , also U(m,n) und U(m,n) offen. Wir können daher an die
Übergangsfunktionen eine zusätzliche Forderung stellen. Sie sollen beliebig oft differenzierbar sein. Wenn
das der Fall ist, dann nennen wir M eine differenzierbare oder glatte Mannigfaltigkeit.
Eine Mannigfaltigkeit heißt glatt oder differenzierbar, wenn die Übergangsfunktionen beliebig oft differenzierbar sind.
Die zweidimensionale Sphäre S2 ist in diesem Sinne eine glatte Mannigfaltigkeit. Denn die Übergangsfunktionen (13.5) und (13.6) sind auf ihrem Definitionsbereich beliebig oft differenzierbare Abbildungen
R2 → R2 . Dar maximale Definitionsbereich dieser Abbildungen ist jeweils der ganze R 2 mit Ausnahme
des Nullpunktes. Wie groß der Definitionsbereich der Übergangsfunktionen tatsächlich ist, hängt davon ab,
wie groß wir die beiden Karten machen. In Abbildung 13.2 ist der Definitionsbereich der Übergangsfunktionen jeweils der Bereich außerhalb der gestichelten, aus vier Halbkreisen zusammengesetzten Linien.
Dass man von den Übergangsfunktionen verlangt, differenzierbar zu sein, hat folgenden Grund. Nur,
wenn das der Fall ist, kann man auf einer Mannigfaltigkeit von differenzierbaren Kurven und Funktionen
sprechen und deren Ableitungen bilden. Genau das benötigen wir, wenn wir auf dem Konfigurationsraum eines mechanischen Systems von dessen Geschwindigkeit sprechen oder Bewegungsgleichungen
aufstellen wollen. Was unter einer differenzierbaren Kurve bzw. eine differenzierbaren Funktion auf einer
Mannigfaltigkeit zu verstehen ist, soll in den folgenden Aufgaben erläutert werden.
Aufgabe 13.7 Es sei λ : R → M eine parametrisierte Kurve auf einer glatten Mannigfaltigkeit. Wir
betrachten ein endliches Stück der Kurve, also λ(s) mit s1 < s < s2 , das ganz im Bild einer Karte
M(n) ⊂ M liegt. Dieses Kurvenstück kann wie üblich durch seine Koordinatendarstellung {λ(n)µ (s)}, also
durch N = dim M reelle Funktionen beschrieben werden. Wir nennen die Kurve k-mal differenzierbar,
wenn die gewöhnlichen Ableitungen
dλ(n)µ
,
ds
d2 λ(n)µ
,
ds2
...,
dk λ(n)µ
dsk
(13.14)
existieren. Warum ist diese Definition nur dann konsistent, wenn die Übergangsfunktionen ebenfalls mindestens k-mal differenzierbar sind? Um von einer beliebig oft differenzierbaren, also einer glatten Kurve
sprechen zu können, müssen demnach auch alle Übergangsfunktionen glatt sein.
Aufgabe 13.8 Für eine Kurve λ(s) mit −1 ≤ s ≤ 1 auf der Sphäre S2 gelte im Abdeckungsbereich der
Kugelkoordinaten
−s
für
−1 ≤ s < 0,
α
für
−1 ≤ s < 0,
ϑ(s) =
ϕ(s) =
(13.15)
s
für
0 < s ≤ 1,
β
für
0 < s ≤ 1.
Man zeige, dass sich diese Kurve bei s = 0 immer zu einer stetigen Kurve erg änzen lässt, dass diese aber
nur dann differenzierbar ist, wenn α − β = π + 2π n mit n ∈ Z gilt.
100
Aufgabe 13.9 Es sei φ : M → R ein skalares Feld, also eine reelle Funktion auf einer glatten Mannigfaltigkeit. Um ein solches Feld explizit darzustellen, beschreibt man es in jeder einzelnen Karte durch seine
Koordinatendarstellung
φ(n) = φ ◦ Σ(n) :
{x(n)µ } 7→ φ(x) = φ(n) ({x(n)µ }).
U(n) → R,
(13.16)
Man stellt das Feld also innerhalb jeder Karte durch eine reelle Funktion von N = dim M reellen Variablen dar, die sich aus dem eigentlichen Feld und der Koordinatenabbildung zusammensetzt. Man nennt
das Feld k-mal differenzierbar, wenn die partiellen Ableitungen
∂φ(n)
,
∂x(n)µ
∂ 2 φ(n)
,
∂x(n)µ ∂x(n)ν
...,
∂ k φ(n)
∂x(n)µ ∂x(n)ν · · · ∂x(n)ρ
(13.17)
existieren. Warum ist es auch für diese Definition notwendig, dass die Übergangsfunktionen beliebig oft
differenzierbar sind?
Aufgabe 13.10 Eine stetige Funktion auf der Sphäre S2 werde in Kugelkoordinaten durch f (ϑ, ϕ) =
sin(2 ϑ), eine andere durch g(ϑ, ϕ) = sin(2 ϑ) cos(3 ϕ) dargestellt. Beide lassen sich zu einer an den
Polen stetigen Funktion fortsetzen, wie man leicht durch Grenzwertbildung ϑ → 0 bzw. ϑ → π sehen
kann. Sind diese Funktionen dann auch differenzierbar?
Aufgabe 13.11 Warum ist jeder affine Raum auch eine glatte Mannigfaltigkeit?
Aufgabe 13.12 In Abbildung 13.4 sind zwei typische Mannigfaltigkeiten dargestellt, die zwar von einer
einzigen Karte überdeckt werden können, allerdings nur, wenn man zulässt, dass diese Karte mit sich
selbst überlappt. Das ist eigentlich nicht zulässig, da die Koordinatenabbildung dann nicht bijektiv ist.
Wie viele Karten braucht man für einen Zylinder bzw. einen Torus mindestens, um einen “richtigen” Atlas
zu definieren?
Aufgabe 13.13 Eine zweidimensionale Mannigfaltigkeit M werde wie folgt durch einen Atlas beschrieben. Er besteht aus drei Karten, die jeweils ein Quadrat im R2 beanspruchen,
U(1) = U(2) = U(3) = {
(x, y) ∈ R2 ,
−1 < x < 1,
−1 < y < 1
}.
(13.18)
Die Karte U(1) überlappt mit der Karte U(2) so, dass die rechte Hälfte von U(1) durch die Übergangsfunktion
−1
Σ (2)
◦ Σ(1) : (x(1) , y(1) ) 7→ (x(2) , y(2) ) = (x(1) − 1, −y(1) )
(13.19)
auf die linke Hälfte von U(2) abgebildet wird. Das gleiche gilt für die rechte Hälfte von U(2) , die durch die
Übergangsfunktion
−1
Σ (3) ◦ Σ(2) :
(x(2) , y(2) )
7→
(x(3) , y(3) ) = (x(2) − 1, −y(2) )
(13.20)
auf die linke Hälfte von U(3) abgebildet wird. Und schließlich wird die rechte Hälfte von U(3) durch
−1
Σ (1)
◦ Σ(3) :
(x(3) , y(3) )
7→
(x(1) , y(1) ) = (x(3) − 1, −y(3) )
(13.21)
auf die linke Hälfte von U(1) abgebildet. Unter welchem Namen ist diese Mannigfaltigkeit allgemein bekannt?
101
ϕ 7→ ϕ + 2π
α 7→ α + 2π
β 7→ β + 2π
replacements
(c)
(d)
S1 × R
S1 × S 1
(a)
(b)
Abbildung 13.4: Der Zylinder (a) und der Torus (b) sind Beispiele für glatte Mannigfaltigkeiten, die sich
mit einer selbstüberlappenden Karte beschreiben lassen.
Kurven und Vektoren
Will man auf einer Mannigfaltigkeit mit Vektoren rechnen, so ergibt sich ein Problem. Es ist nicht möglich,
einem Paar von Punkten x, y ∈ M einen Abstandsvektor y − x zuzuordnen, um auf diese Weise einen
zugeordneten Vektorraum zu definieren.
Am Beispiel der Sphäre kann man sich das leicht klar machen. Es ist nicht möglich, jeweils zwei Punkte
auf der Sphäre so durch einen Vektor zu verbinden, dass die Menge aller dieser Vektoren einen Vektorraum bildet und die üblichen Rechenregeln gelten. Die “üblichen Rechenregeln” wären dann nämlich die
Axiome für einen affinen Raum, und die Sphäre ist ja gerade kein affiner Raum.
Man kann jedoch statt dessen Tangentenvektoren von Kurven definieren und darauf aufbauend Vektoren und Tensoren auf Mannigfaltigkeiten einführen, die sich im wesentlichen so verhalten wie Vektoren
und Tensoren auf affinen Räumen. Im Prinzip haben wir genau das bereits im letzten Kapitel verwendet,
wenn wir dort von Geschwindigkeiten gesprochen haben. Allerdings gibt es einen wichtigen Unterschied
zwischen affinen Räumen und Mannigfaltigkeiten, den wir im folgenden herausarbeiten wollen.
Es sei λ : R → M eine parametrierte Kurve auf einer glatten Mannigfaltigkeit. Sie soll im Sinne der
Aufgabe 13.7 differenzierbar sein. Wir können die Kurve λ(s) dann innerhalb einer Karte M (m) durch
einen Satz von N = dim M differenzierbaren Funktionen λ(m)µ (s) darstellen und die Ableitungen
λ0(m)µ (s) =
dλ(m)µ
ds
(13.22)
bilden. In einem affinen Raum sind dies die Komponenten des Tangentenvektors λ 0 (s), dargestellt in der
lokalen Koordinatenbasis am Punkt λ(s). Wir wollen zeigen, dass eine ähnliche Interpretation auch auf
einer Mannigfaltigkeit möglich ist.
Wir betrachten dazu den Teil der Kurve, der im Überlappgebiet der Karte M(m) mit einer anderen Karte
M(n) liegt. Dort wird dieselbe Kurve λ(s) durch die Koordinatenfunktionen λ (n)ν (s) dargestellt. Für die
Ableitungen dieser Funktionen gilt
λ0(n)ν (s)
∂λ(n)ν dλ(m)µ
dλ(n)ν
=
= Λ(n,m)νµ (λ(s)) λ0(m)µ (s).
=
ds
∂λ(m)µ ds
102
(13.23)
Das entspricht dem bekannten Transformationsverhalten eines Vektors beim Übergang von einem krummlinigen Koordinatensystem zu einem anderen. Die Übergangsmatrix ist durch die partiellen Ableitungen
der “neuen” Koordinaten x(n)ν nach den “alten” Koordinaten x(m)µ gegeben, und sie hängt von dem Ort x
ab, an dem wir diese Ableitungen bilden,
Λ(n,m)νµ (x) =
∂x(n)ν
.
∂x(m)µ
(13.24)
Der einzige Unterschied zur Notation in Kapitel 10 ist, dass wir die beiden Koordinatensysteme {x (m)µ }
und {x(n)ν } jetzt nicht durch verschiedene Indexmengen unterscheiden, sondern durch einen zusätzlichen
Kartenindex (m) bzw. (n), der entsprechend auch die Übergangsmatrix kennzeichnet.
Ansonsten ergeben sich aus der Kettenregel für die partiellen Ableitungen (13.24) die bekannten Eigenschaften von Übergangsmatrizen. Vertauscht man die Karten M(m) und M(n) , so ergibt sich die inverse
Übergangsmatrix, und im Überlappgebiet von drei Karten M(l) , M(m) und M(n) können die Transformationen verkettet werden,
Λ(n,m)νµ (x) Λ(m,n)µρ (x) = δ νρ ,
Λ(l,m)ρµ (x) Λ(m,n)µν (x) = Λ(l,n)ρµ (x).
(13.25)
Aufgrund dieser Beobachtung können wir nun wie folgt einen Vektorraum definieren. An jedem Punkt
x ∈ M(m) innerhalb einer Karte führen wir zunächst ganz formal einen Satz von N = dim M Vektoren
e(m)µ (x) ein. Diese spannen einen Vektorraum auf, den wir mit T M bezeichnen und Tangentenraum von
M am Punkt x ∈ M nennen. Die Vektoren e(m)µ (x) bilden also eine Basis von T M, die wir als lokale
Koordinatenbasis bezeichnen.
Damit die Definition konsistent ist, müssen wir sagen, welche Beziehung zwischen der Koordinatenbasis e(m)µ (x) und der Koordinatenbasis e(n)ν (x) bestehen soll, wenn x im Überlappgebiet von zwei Karten
M(m) und M(n) liegt. Beides sind dann nämlich Basen desselben Vektorraumes T M. Genau wie für
die lokalen Koordinatenbasen von zwei krummlinigen Koordinatensystem in einem affinen Raum soll in
diesem Fall das Transformationsgesetz
e(n)ν (x) = e(m)µ (x) Λ(m,n)µν (x)
(13.26)
gelten, wobei die Übergangsmatrix Λ(m,n)µν (x) durch (13.24) gegeben ist.
Aufgabe 13.14 Warum sind die Beziehungen (13.25) zwischen den Übergangsmatrizen notwendige Bedingungen dafür, dass die Forderung (13.26) an die Basisvektoren konsistent ist?
Nun haben wir in jedem Punkt x ∈ M einen anderen Vektorraum T M definiert. Außer den Beziehungen
(13.26) zwischen den lokalen Basisvektoren e(m)µ (x) und e(n)ν (x) am selben Punkt x im Überlappgebiet
der Karten M(m) und M(n) gibt es nämlich keinerlei Beziehungen zwischen den Basen e(m)µ (x) und
e(m)µ (y) an verschiedenen Punkten x, y ∈ M(m) , selbst wenn beide Punkte in derselben Karte liegen.
Da genau das der wesentliche Unterschied zwischen einer Mannigfaltigkeit und einem affinen Raum ist,
fassen wir es noch einmal wie folgt zusammen:
Eine glatte Mannigfaltigkeit M besitzt in jedem Punkt x ∈ M einen Tangentenraum T M,
der innerhalb einer Karte M(m) von der lokalen Koordinatenbasis e(m)µ (x) aufgespannt wird.
Den Tangentenvektor einer Kurve λ(s) können wir dann wie üblich darstellen. Es gilt
λ0 (s) = λ0(m)µ (s) e(m)µ (λ(s)) = λ0(n)ν (s) e(n)ν (λ(s)),
(13.27)
wobei die Gleichheit der beiden Darstellungen aus dem Transformationsverhalten (13.23) für die Koordinatenfunktionen und (13.26) für die Basisvektoren folgt. Die Darstellung des Tangentenvektors einer
103
e(N)v
e(N)u
T S2
(u(N) , v(N) )
eϕ
λ0 (s)
x
(ϑ, ϕ)
e(S)v
λ(s)
eϑ
e(S)u
(u(S) , v(S) )
(b)
(a)
(c)
Abbildung 13.5: In jedem Punkt einer Mannigfaltigkeit spannen die lokalen Basisvektoren (a) den Tangentenraum (b) auf. Der Tangentenvektor einer Kurve (c) liegt stets im Tangentenraum an dem Punkt, den
die Kurve gerade durchläuft.
Kurve in der lokalen Koordinatenbasis ist formal mit der auf einem affinen Raum identisch. Allerdings
gibt es einen Unterschied. Der Tangentenvektor einer Kurve λ(s) auf einer Mannigfaltigkeit liegt für jedes
s in einem anderen Vektorraum, denn aus (13.27) folgt λ0 (s) ∈ T (s) M.
Warum das so ist, und warum eine Mannigfaltigkeit in jedem Punkt einen anderen Tangentenraum besitzt, können wir uns am Beispiel der Sphäre S2 anschaulich klar machen. In Abbildung 13.5(a) sind verschiedene Koordinatensysteme auf der Sphäre dargestellt. Oben links ein Ausschnitt aus der Nord-Karte
mit den Koordinaten (u(N) , v(N) ), unten ein Ausschnitt aus der Süd-Karte mit den Koordinaten (u (S) , v(S) ),
und rechts sind ein paar Längen- und Breitenkreise dargestellt, also die Koordinatenlinien der Kugelkoordinaten (ϑ, ϕ).
An jedem Punkt im Abdeckungsbereich dieser Koordinatensysteme können wir eine lokale Koordinatenbasis einführen. In der Nord-Karte besteht diese aus den Vektoren (e (N)u , e(N)v ), die wir uns anschaulich als Vektoren vorstellen können, die in die Richtungen der jeweiligen Koordinatenlinien zeigen.
Entsprechend gibt es in der Süd-Karte an jedem Punkt zwei Vektoren (e (S)u , e(S)v ), die dort die lokale
Koordinatenbasis bilden. Und schließlich gilt dasselbe für die Vektoren (e ϑ , eϕ ) in Kugelkoordinaten.
Wenn wir uns diese Basisvektoren im Einbettungsraum vorstellen, in diesem Fall also im R 3 , so wird
klar, dass es sich nicht nur in jedem Punkt auf der Sphäre um eine andere Basis handelt, sondern dass sogar
in jedem Punkt x ∈ S2 ein anderer Vektorraum T S2 aufgespannt wird. Dies wird in Abbildung 13.5(b)
deutlich. Die lokale Koordinatenbasis spannt in jedem Punkt eine Ebene auf, die dort tangential an der
Sphäre anliegt. Das ist für jeden Punkt auf der Sphäre ein anderer zweidimensionaler Unterraum des
dreidimensionalen Einbettungsraumes. Es gibt keine Möglichkeit, alle diese Unterräume so miteinander
zu identifizieren, dass man sie als Kopien ein und desselben Vektorraumes betrachten könnte.
Das ist die bildliche Vorstellung, die man sich von dem Tangentenraum T M einer Mannigfaltigkeit M
an einem Punkt x ∈ M machen kann. Bettet man die Mannigfaltigkeit in einen größeren affinen Raum ein,
so ist der Tangentenraum an einem bestimmten Punkt derjenige Unterraum des Einbettungsraumes, der an
diesem Punkt tangential an der eingebetteten Mannigfaltigkeit anliegt. Und das erklärt auch anschaulich,
warum der Vektorräume T M und T M für x 6= y verschieden sind.
Wir können nun auch verstehen, warum der Tangentenvektor λ 0 (s) einer Kurve an der Stelle s stets im
Tangentenraum T (s) M liegt. Betrachten wir nämlich die in Abbildung 13.5(c) dargestellte Kurve auf der
eingebetteten Sphäre, so zeigt der Tangentenvektor dieser Kurve stets tangential zu Sphäre. Er liegt an
jeder Stelle der Kurve in demjenigen Unterraum des Einbettungsraumes, der an dieser Stelle zur Sphäre
104
tangential ist.
Aus dieser Tatsache und dem Umstand, dass der Tangentenraum an jedem Punkt ein anderer ist, folgt
unter anderem, dass es auf einer Mannigfaltigkeit keine Geraden im üblichen Sinne gibt. Eine Gerade in
einem affinen Raum ist nämlich eine Kurve, deren Tangentenvektor, zumindest bis auf eine Skalierung,
entlang der Kurve konstant ist. Auf einer Mannigfaltigkeit ist jedoch schon die Frage sinnlos, ob ein Vektor
v ∈ T M mit einem Vektor w ∈ T M übereinstimmt oder nicht. Und damit ist auch die Frage sinnlos,
ob der Tangentenvektor einer Kurve konstant ist oder nicht. Wir können gar nicht entscheiden, ob eine
Kurve “geradeaus” läuft oder nicht.
Gewisse Eigenschaften von affinen Räumen existieren also auf Mannigfaltigkeiten nicht mehr. So gibt
es keine Abstandsvektoren und keine Geraden mehr, und folglich auch keine geradlinigen Koordinatensystem. In diesem Sinne ist ein Koordinatensystem auf einer Mannigfaltigkeit immer krummlinig. Andere
Eigenschaften bleiben jedoch erhalten. Wir können Ableitungen von Kurven bilden und diese als Vektoren
in einem Vektorraum betrachten, auch wenn wir dazu in jedem Punkt einen anderen Vektorraum einführen
müssen.
Um diese Eigenschaft von Vektoren deutlich zu machen, sagen wir, dass jeder Vektor auf einer Mannigfaltigkeit einen Bezugspunkt hat. Ein Vektor v ∈ T M hat den Bezugspunkt x. Wenn wir Vektoren
miteinander verknüpfen, etwa indem wir sie addieren oder mit Skalaren multiplizieren, müssen wir stets
darauf achten, dass wir nur Vektoren mit dem gleichen Bezugspunkt verknüpfen können. Das gleiche gilt
für das Bilden von Tensoren, wie wir gleich zeigen werden.
Aufgabe 13.15 Die Kurve in Abbildung 13.5(c) hat in Kugelkoordinaten die Darstellung
ϑ(s) = π s,
ϕ(s) = 4π s,
mit 0 < s < 1.
(13.28)
Sie läuft vom Nord- zum Südpol und umrundet die Sphäre dabei zweimal in West-Ost-Richtung. Wie lautet
die Darstellung des Tangentenvektors in Kugelkoordinaten, wie in der Nord-Karte und wie in der S üdKarte? Wenn man die Kurve stetig zu den Endpunkten fortsetzt, ist der Tangentenvektor dann bei s = 0
und bei s = 1 wohldefiniert? Welche Karten muss man verwenden, um ihn dort zu berechnen?
Aufgabe 13.16 Eine andere Kurve auf der Sphäre werde in Kugelkoordinaten wie folgt dargestellt,
ϑ(s) = a sk ,
ϕ(s) = b/s,
0 < s < s0 ,
(13.29)
wobei k > 0, a, b und s0 Konstanten sind. Für s → 0 nähert sich diese Kurve offenbar dem Nordpol. Wir
können die Kurve also stetig nach s = 0 fortsetzen. Ist sie dort dann noch differenzierbar? Mit anderen
Worten, existiert der Tangentenvektor λ0 (s) für s = 0?
Aufgabe 13.17 Ein Vektorfeld auf einer Mannigfaltigkeit M ist eine Zuordnung F : x 7→ F (x) ∈ T M.
Sie ordnet jedem Punkt x ∈ M einen Vektor im Tangentenraum bei x zu. Wie sieht die Koordinatendarstellung eines solchen Feldes aus, und wie verhält es sich beim Übergang von einer Karte in eine andere?
Aufgabe 13.18 Auf der Sphäre S2 seien zwei Vektorfelder F und G in Kugelkoordinaten durch
F (ϑ, ϕ) = eϕ ,
G(ϑ, ϕ) = cot ϑ sin ϕ eϕ + cos ϕ eϑ
(13.30)
gegeben. Wie sieht ihre Darstellung in der Nord- bzw. Süd-Karte aus? Lassen sie sich stetig und differenzierbar an den Polen fortsetzen?
Aufgabe 13.19 Man zeige, dass die lokale Koordinatenbasis auch auf einer Mannigfaltigkeit aus den
Tangentenvektoren der Koordinatenlinien besteht. Betrachtet man n ämlich den Punkt x als Funktion der
Koordinaten {x(m)µ }, so gilt
∂x
.
(13.31)
e(m)µ (x) =
∂x(m)µ
Die anschauliche Vorstellung, von der wir in Abbildung 13.1(a) ausgegangen sind, ergibt sich demnach
auch aus der formalen Definition des Tangentenraumes und der lokalen Koordinatenbasis.
105
Duale Vektoren und Tensoren
Nun betrachten wir statt einer Kurve λ : R → M ein skalares Feld φ : M → R, also eine Abbildung in
die umgekehrte Richtung. Es soll im Sinne der Aufgabe 13.9 differenzierbar sein. Es wird in einer Karte
M(m) als Funktion der Koordinaten {x(m)µ } dargestellt, und wir können dort die partiellen Ableitungen
∂µ φ(m) (x) =
∂φ
∂x(m)µ
(13.32)
bilden. Befinden wir uns im Überlappgebiet mit einer anderen Karte M(n) , so gilt entsprechend
∂ν φ(n) (x) =
∂φ
∂φ ∂x(m)µ
=
= ∂µ φ(m) (x) Λ(m,n)µν (x).
∂x(n)ν
∂x(m)µ ∂x(n)ν
(13.33)
Da dies das bekannte Transformationsgesetz eines dualen Vektors ist, können die wir partiellen Ableitungen als Komponenten eines dualen Vektors auffassen.
Wir definieren dazu an jedem Punkt x ∈ M einen Kotangentenraum T ∗ M, der zum Tangentenraum
T M im üblichen Sinne dual ist. Dann existiert zu jeder Basis von T M eine duale Basis von T∗ M.
Insbesondere gibt es zu der lokalen Koordinatenbasis e(m)µ (x) ein duale Koordinatenbasis e(m)µ (x) mit
der Eigenschaft
e(m)µ (x) · e(m)ν (x) = δ µν .
(13.34)
Der Punkt bezeichnet wie üblich das Produkt eines dualen Vektors mit einem Vektor. Der duale Vektor ist
eigentlich eine lineare Abbildung, die auf den Vektor angewandt wird.
Der Kotangentenraum T∗ M ist der zum Tangentenraum T M duale Vektorraum. Er wird
innerhalb einer Karte M(m) von einer dualen Koordinatenbasis e(m)µ (x) aufgespannt.
Für die dualen Basisvektoren gilt das übliche Transformationsverhalten im Überlappgebiet von zwei Karten, nämlich
e(n)ν (x) = e(m)µ (x) Λ(m,n)µν (x)
⇒
e(n)ν (x) = Λ(n,m)νµ (x) e(m)µ (x).
(13.35)
Daraus und aus (13.33) ergibt sich, dass durch
∇φ(x) = ∂µ φ(m) (x) e(m)µ (x) = ∂ν φ(n) (x) e(n)ν (x)
(13.36)
ein dualer Vektor am Bezugspunkt x definiert wird, der vom verwendeten Koordinatensystem unabhängig
ist. Dieser duale Vektor ist der Gradient von φ an der Stelle x. Der Gradient eines skalaren Feldes φ ist
ein duales Vektorfeld ∇φ, das jedem Punkt x ∈ M einen dualen Vektor ∇φ(x) ∈ T ∗ M zuordnet.
Um die Notation ein wenig zu vereinfachen, werden wir im folgenden den Kartenindex weglassen, wenn
wir von den Koordinaten eines Punktes oder den Komponenten eines Vektors sprechen, ohne uns dabei
auf eine bestimmte Karte zu beziehen. Für die lokalen Basisvektoren schreiben wir einfach e µ (x), bzw.
für die dualen Basisvektoren eµ (x). Entsprechend gilt dann für den Tangentenvektor einer Kurve bzw. den
Gradienten eines skalaren Feldes
∇φ(x) = ∂µ φ(x) eµ (x),
λ0 (s) = λ0µ (s) eµ (λ(s)),
(13.37)
was der ursprünglichen Notation aus Kapitel 10 entspricht. Wir bringen damit zum Ausdruck, dass die
Gleichungen in dieser Form in jedem Koordinatensystem gelten.
Für Vektoren und duale Vektoren auf einer Mannigfaltigkeit gelten somit die gleichen Rechenregeln wie
in krummlinigen Koordinatensystemen auf affinen Räumen. Insbesondere gelten dieselben Transformationsgesetze beim Übergang von einem Koordinatensystem zu einem anderen. Wir müssen nur beachten,
106
dass alle Vektoren und duale Vektoren auf einer Mannigfaltigkeit einen Bezugspunkt haben müssen, und
dass wir nur solche Objekte miteinander kombinieren dürfen, die denselben Bezugspunkt haben.
Das gilt insbesondere für das Produkt eines dualen Vektors mit einem Vektor, wie es in (13.34) auftritt.
Ein typisches Beispiel dafür ist die Richtungsableitung einer Funktion, die auch auf einer Mannigfaltigkeit
definiert werden kann. Es sei φ : M → R wieder ein skalares Feld auf M und λ : R → M eine Kurve.
Dann wird durch s 7→ φ(λ(s)) eine Funktion R → R definiert. Ihre Ableitung ist die Ableitung des Feldes
entlang der Kurve,
dφ(λ(s))
dλµ ∂φ
0µ
0
=
µ = λ (s) ∂µ φ(λ(s)) = λ (s) · ∇φ(λ(s)).
ds
ds ∂λ
(13.38)
Entscheidend ist hier, dass das Produkt eines dualen Vektors ∇φ(λ(s)) mit einem Vektor λ 0 (s) gebildet
wird, die beide denselben Bezugspunkt haben. Sonst wäre das Produkt nicht definiert.
Um ganz allgemein die Richtungsableitung eines skalaren Feldes φ zu berechnen, müssen wir einen
Punkt x ∈ M und einen Vektor v ∈ T M vorgeben. Sind xµ die Koordinaten von x und v µ die Komponenten von v bezüglich der lokalen Koordinatenbasis eµ (x), so ist die Richtungsableitung durch
v · ∇φ(x) = v µ ∂µ φ(x)
(13.39)
gegeben. Auch hier ergibt sich formal der gleiche Ausdruck wie auf einem affinen Raum.
Aus Vektoren und dualen Vektoren können wir nun in der üblichen Art und Weise Tensoren bilden. Das
einzig neue ist auch hier, dass jeder Tensor einen Bezugspunkt haben muss. Wir können nicht einfach von
einem Tensor A auf einer Mannigfaltigkeit M sprechen, sondern müssen immer zusätzlichen abgeben, an
welchem Punkt x ∈ M der Tensor definiert ist.
Tensoren auf Mannigfaltigkeiten treten deshalb meistens als Tensorfelder auf. Ein Tensorfeld F der
Stufe (m, n) auf einer Mannigfaltigkeit M ist eine Zuordnung, die jedem Punkt x ∈ M einen Tensor
(m,n)
F (x) ∈ T
M zuordnet, also einen Tensor der Stufe (m, n) am Punkt x. Die Koordinatendarstellung
eines solchen Tensorfeldes sieht dann genau wie die in einem krummlinigen Koordinatensystem in einem
affinen Raum aus,
F (x) = F µ ··· νρ ··· σ (x) eµ (x) ⊗ · · · ⊗ eν (x) ⊗ eρ (x) ⊗ · · · ⊗ eσ (x) .
{z
}
{z
} |
|
m
(13.40)
n
Die Komponenten F µ ··· νρ ··· σ des Tensorfeldes sind (dim M)m+n Funktionen der Koordinaten xµ . Wir
nennen ein Tensorfeld stetig, differenzierbar etc. wenn die Koordinatendarstellung diese Eigenschaft hat.
Die einfachsten Tensorfelder sind skalare Felder der Stufe (0, 0), Vektorfelder der Stufe (1, 0), wie
sie bereits in der Aufgabe 13.18 definiert wurden, oder duale Vektorfelder der Stufe (0, 1), die sich in
natürlicher Weise als Gradienten von skalaren Feldern ergeben. Schließlich können wir Tensoren in der
üblichen Art und Weise addieren, multiplizieren und kontrahieren, um neue Tensoren zu bilden. Wir wollen
das am Beispiel einer Metrik demonstrieren.
Wir erinnern uns, dass ein metrischer affiner Raum dadurch charakterisiert ist, dass auf dem zugeordneten Vektorraum ein Skalarprodukt existiert. Entsprechend ist eine metrische Mannigfaltigkeit eine glatte
Mannigfaltigkeit M, mit der Eigenschaft, dass auf jedem Tangentenraum T M ein Skalarprodukt definiert wird. Da ein Skalarprodukt auf einem Vektorraum durch einen Tensor der Stufe (0, 2) dargestellt
wird, ist eine Metrik auf einer Mannigfaltigkeit ein Tensorfeld der Stufe (0, 2).
Man bezeichnet dieses Tensorfeld üblicherweise mit g(x), und folglich seine Komponenten bezüglich
der lokalen Koordinatenbasis mit gµν (x). Wie in jedem Vektorraum sind die Einträge dieser symmetrischen, positiven Matrix gerade die Skalarprodukte der Basisvektoren, also
gµν (x) = eµ (x) · eν (x).
107
(13.41)
Wir können dann das Skalarprodukt von zwei Vektoren u, v ∈ T M berechnen, indem wir diese zuerst
durch ihre Komponenten uµ bzw. v ν in der lokalen Koordinatenbasis darstellen und anschließend mit der
Metrik gµν kontrahieren,
u · v = gµν (x) uµ v ν , für u, v ∈ T M.
(13.42)
Auch hier ist es wieder entscheidend, dass beide Vektoren im selben Tangentenraum T M liegen, und
dass wir die Metrik an diesem Punkt x verwenden, um das Skalarprodukt zu berechnen. Ansonsten sind
es aber dieselben Kombinationsregeln für Tensoren, aus denen sich ergibt, dass das Ergebnis ein Skalar,
also unabhängig von der verwendenten Basis bzw. von dem gewählten Koordinatensystem ist, bezüglich
dessen wir die Vektoren und die Metrik darstellen.
Mit Hilfe einer Metrik können wir auch die Länge einer Kurve λ(s) für a ≤ s ≤ b auf einer Mannigfaltigkeit berechnen. Zuerst bestimmen wir den Betrag des Tangentenvektors,
|λ0 (s)|2 = λ0 (s) · λ0 (s) = gµν (λ(s)) λ0µ (s) λ0ν (s),
(13.43)
den wir anschließend entlang der Kurve integrieren,
L(a, b) =
Z
a
b
q
ds gµν (λ(s)) λ0µ (s) λ0ν (s).
(13.44)
Das Ergebnis ist die Länge der Kurve zwischen den Punkten λ(a) und λ(b). Der Ausdruck (13.44) ist
genau derselbe wie der für die Länge einer Kurve in einem affinen Raum, wenn wir dort ein krummliniges
Koordinatensystem verwenden.
Wie so eine Metrik aussieht, können wir uns am Beispiel der Sphäre wie folgt klar machen. Wir stellen
uns wieder vor, dass die Sphäre in einen dreidimensionalen Raum in der üblichen Art und Weise eingebettet ist. Diesmal soll es sich um eine Kugeloberfläche mit dem Radius R handeln. Die Einbettung wird in
Kugelkoordinaten durch
x = R sin ϑ cos ϕ,
y = R sin ϑ sin ϕ,
z = R cos ϑ
(13.45)
beschrieben, wobei (x, y, z) ein kartesisches Koordinatensystem sein soll. Eine Kurve auf der Sphäre, die
dort durch die Koordinatenfunktionen (ϑ(s), ϕ(s)) beschrieben wird, definiert dann eine entsprechende
Kurve im dreidimensionalen Raum, die durch die Koordinatenfunktionen (x(s), y(s), z(s)) beschrieben
wird. Dort können wir die Länge der Kurve berechnen. Eine kurze Rechnung ergibt
x0 (s)2 + y 0 (s)2 + z 0 (s)2 = R2 ϑ0 (s)2 + R2 sin2 (ϑ(s)) ϕ0 (s)2 .
(13.46)
Die Kurvenlänge ist somit durch den Ausdruck (13.44) gegeben, wobei wir unter der Wurzel die rechte
Seite von (13.46) einsetzen müssen. Durch Koeffizientenvergleich entnehmen wir daraus, dass die Komponenten der Metrik auf der Sphäre S2 in Kugelkoordinaten wie folgt gegeben sein müssen, wenn sich die
gleiche Kurvenlänge ergeben soll,
gϑϑ = R2 ,
gϑϕ = 0,
gϕϑ = 0,
gϕϕ = R2 sin2 ϑ.
(13.47)
An dieser Stelle können wir die Einbettung wieder vergessen. Durch das symmetrische Tensorfeld (13.47)
wird an jedem Punkt der Sphäre ein Skalarprodukt im dortigen Tangentenraum definiert. Wir können also
die Länge eines Vektors oder den Winkel zwischen zwei Vektoren, sofern sie den gleichen Bezugspunkt
haben, berechnen, ohne dafür die Sphäre in den dreidimensionalen Raum einzubetten.
Aus der Tatsache, dass die Metrik in Kugelkoordinaten durch eine Diagonalmatrix beschreiben wird,
folgt zum Beispiel, dass sich die Koordinatenlinien überall im Abdeckungsbereich dieser Karte im rechten
108
Winkel schneiden. Die Basisvektoren eϑ und eϕ sind nämlich überall zueinander orthogonal. Das kennen
wir bereits als Eigenschaft der Koordinatenlinien eines Kugelkoordinatensystems im dreidimensionalen
Raum. Mit der Metrik (13.47) auf der Sphäre ist dies aber nun eine Eigenschaft der Sphäre selbst, und
nicht ihrer Einbettung.
Aufgabe 13.20 Um zu beweisen, dass durch (13.47) tatsächlich eine Metrik auf der ganzen Sphäre definiert wird, muss man eigentlich noch zeigen, dass sich auch an den Polen ein wohldefiniertes Skalarprodukt
in den dortigen Tangentenräumen ergibt. Man berechne dazu die Komponenten guu , guv , gvu und gvv desselben Tensors in der Nord- und Süd-Karte und zeige, dass sich auch für (u, v) = (0, 0) ein symmetrische,
positive Matrix ergibt.
Aufgabe 13.21 Betrachtet man die Erdkarten in Abbildung 13.2, so f ällt auf, dass die Erdteile zwar im
großen etwas verzerrt dargestellt sind, die Küstenlinien im kleinen aber recht treu wiedergegeben werden,
und zwar unabhängig davon, ob wir uns in Polnähe oder in der Nähe des Äquators befinden. Sowohl
Grönland auf der Nord-Karte als auch Neu Guinea auf beiden Karten werden recht wirklichkeitstreu
dargestellt, wenn auch in verschiedenen Maßstäben. Der Grund dafür ist, dass die Karten winkeltreu
sind. Wenn sich zwei Kurven auf der Erdoberfläche unter einem Winkel α schneiden, so tun sie dies auch
auf der Karte. Man benutze die Darstellung der Metrik aus Abbildung 13.20, um das zu beweisen.
Aufgabe 13.22 Wie sieht der antisymmetrische Einheitstensor ω auf der Sph äre S2 aus, wenn die Metrik
durch (13.47) gegeben ist? Man bestimme seine Komponenten ω µν in Kugelkoordinaten, sowie in den
Koordinaten (u, v) der Nord- bzw. Süd-Karte.
Ableitungen
Formal gilt also auch für Tensorfelder, was wir schon speziell für Vektoren und duale Vektoren gesagt
haben. Es gelten dieselben Rechnenregeln wie in krummlinigen Koordinatensystemen auf affinen Räumen. Tensoren lassen sich durch Addition, Tensormultiplikation und Kontraktion miteinander verknüpfen.
Das Berechnen des Skalarproduktes von zwei Vektoren ist ein Beispiel für eine solche Verknüpfung. Wir
bilden zuerst das Tensorprodukt der Vektoren mit der Metrik, und kontrahieren anschließend die Indizes
paarweise, so dass sich ein Skalar ergibt.
Eine Operation haben wir jedoch noch nicht genauer betrachtet. Auf einem affinen Raum können wir
aus einem Tensorfeld der Stufe (m, n) durch Ableiten ein Tensorfeld der Stufe (m, n + 1) bilden. So wird
zum Beispiel aus einem Vektorfeld F µ (x) durch Ableiten der Komponenten nach den affinen Koordinaten
xµ ein Tensorfeld ∂µ F µ (x) der Stufe (1, 1). Wenn wir ein krummliniges Koordinatensystem verwenden,
können wir diese Operation zwar immer noch durchführen, aber wir müssen die kovariante Ableitung
verwenden,
∇µ F ν (x) = ∂µ F ν (x) + Γ νρµ (x) F ρ (x),
mit Γ νρµ (x) = eν (x) · ∂µ eρ (x).
(13.48)
Das Christoffel-Symbol Γ νµρ mussten wir einführen, um die Ortsabhängigkeit der lokalen Koordinatenbasis in einem krummlinigen Koordinatensystem beim Ableiten zu berücksichtigen.
Es stellt sich nun die Frage, wie es sich mit einer solchen Ableitung auf einer Mannigfaltigkeit verhält,
wo ja jedes Koordinatensystem krummlinig ist. Die Antwort ist recht einfach: Es gibt eine solche Ableitung nicht. Betrachten wir nämlich die Definition des Christoffel-Symbols, so kommt darin die Ableitung
∂µ eρ (x) vor, also die Ableitung der Basisvektoren eρ (x) nach den Koordinaten xµ . Das ist aber nun ein
sinnloser Ausdruck. Denn um diese Ableitung zu berechnen, müssten wir zuerst die Differenzen dieser
Vektoren an verschiedenen Punkten berechnen und dann einen Grenzwert bilden. Wir können eine solche
Differenz aber nicht berechnen, da die Basisvektoren an verschiedene Punkt in verschiedenen Vektorräumen liegen.
109
Die Möglichkeiten, auf einer Mannigfaltigkeit Ableitungen von Tensorfeldern zu bilden, sind also stark
eingeschränkt. Wir können zwar die Ableitung eines skalaren Feldes bilden und bekommen ein duales
Vektorfeld, aber das ist die einzige Ableitung eines Tensorfeldes nach den Koordinaten, die wir in einem
krummlinigen Koordinatensystem bilden können, ohne das Christoffel-Symbol zu verwenden. Das hat
auch wieder einen einfachen Grund. Wäre es möglich, die Ableitung eines Vektorfeldes auf einer Mannigfaltigkeit zu bilden, so könnten wir auch sagen, wann ein Vektor konstant ist und wann nicht, und folglich
gäbe es doch wieder so etwas wie eine Gerade, und wir könnten doch wieder Vektoren in verschiedenen
Tangentenräumen miteinander vergleichen.
Interessanterweise gibt es aber gewisse Kombinationen von Ableitungen, die Tensorfelder wieder auf
Tensorfelder abbilden. Und genau dafür kennen wir schon ein Beispiel. Das ist die spezielle Ableitung,
die in der Lagrangeschen Bewegungsgleichungen gebildet wird. Darauf werden wir im nächsten Abschnitt
noch einmal kurz eingehen. Es gibt noch andere Beispiele für solche Tensorableitungen, die auch auf
Mannigfaltigkeiten wohldefiniert sind, und für die kein Christoffel-Symbol benötigt wird. Es würde ein
wenig zu weit führen, hier alle Möglichkeiten zu diskutieren, aber wir wollen an einem Beispiel, das später
noch eine gewisse Rolle spielen wird, zumindest das Prinzip erklären.
Es sei F ein Vektorfeld und φ ein skalares Feld auf einer glatten Mannigfaltigkeit M. Dann können wir
an jeder Stelle x ∈ M die Richtungsableitung von φ(x) in Richtung des Vektors F (x) bilden. Das ist
wieder ein skalares Feld. Wir schreiben dafür
(F · ∇) φ = F (x) · ∇φ = F µ (x) ∂µ φ(x).
(13.49)
Wir können F · ∇ als einen Ableitungsoperator auffassen, der auf die Funktion φ wirkt und daraus eine
andere skalare Funktion macht.
Aufgabe 13.23 Man zeige, dass sich der Operator F · ∇ tatsächlich wie ein Ableitungsoperator verhält.
Er ist linear, und es gilt die Produkt- und Kettenregel,
F · ∇(φ1 + φ2 ) = F · ∇φ1 + F · ∇φ1 ,
F · ∇(φ1 φ2 ) = (F · ∇φ1 ) φ2 + φ1 (F · ∇φ1 ),
F · ∇(g ◦ φ) = (g 0 ◦ φ) (F · ∇φ).
(13.50)
Man beachte, dass in der letzten Gleichung g : R → R eine gewöhnliche reelle Funktion ist.
Das ist noch nichts neues, denn bis jetzt haben wir nur den Gradient eines skalaren Feldes gebildet und
dieses duale Vektorfeld mit einem Vektorfeld multipliziert und kontrahiert. Nun betrachten wir ein zweites
Vektorfeld G und den zugehörigen Operator G · ∇. Wir lassen zuerst diesen und dann den Operator F · ∇
auf ein skalares Feld wirken. Das Ergebnis ist
(F · ∇) (G · ∇) φ = (F · ∇) Gν ∂ν φ = F µ ∂µ Gν ∂ν φ
= F µ ∂µ Gν φ + F µ Gν ∂µ ∂ν φ.
(13.51)
Man beachte, dass das Resultat wieder ein skalares Feld ist, obwohl die einzelnen Terme im letzten Ausdruck keine Tensoren sind. Weder die Ableitungen ∂µ Gν noch die zweiten Ableitungen ∂µ ∂ν φ verhalten
sich beim Übergang von eine Karte zu einer anderen wie die Komponenten eines Tensors. Die Summe der
beiden Ausdrücke ist aber ein Skalar, weil wir von der linken Seite der Gleichung wissen, dass es sich um
einen Skalar handelt.
Nun bilden wir die gleiche doppelte Ableitung noch einmal, nur in der anderen Reihenfolge. Es wirkt
also zuerst der Operator F · ∇ und dann der Operator G · ∇,
(G · ∇) (F · ∇) φ = Gµ ∂µ F ν φ + Gµ F ν ∂µ ∂ν φ.
110
(13.52)
Wenn wir jetzt die beiden Ausdrücke voneinander abziehen, so finden wir
(F · ∇) (G · ∇) φ − (G · ∇) (F · ∇) φ = (F µ ∂µ Gν − Gµ ∂µ F ν ) ∂ν φ.
(13.53)
Das ist wieder in Ausdruck der Form (13.49), und zwar
(H · ∇) φ mit H µ = F µ ∂µ Gν − Gµ ∂µ F ν .
(13.54)
Tatsächlich findet man, dass H wieder ein Vektorfeld ist. Es wird in einer speziellen Art und Weise aus
den Ableitungen der Felder F und G gebildet. Man nennt es den Kommutator von F und G. Welche geometrische Bedeutung hinter dieser Struktur steckt, werden wir später erfahren, wenn wir uns ausführlich
mit den Symmetrien von mechanischen Systemen beschäftigen.
Hier soll dies nur als Beispiel dafür dienen, zu zeigen, dass man auf einer Mannigfaltigkeit zwar Ableitungen von Tensorfeldern nach den Koordinaten bilden kann, dass aber nur bestimmte Kombinationen
solcher Ableitungen wieder Tensorfelder sind. Eine solche spezielle Kombination ist die in (13.54) angegebene.
Aufgabe 13.24 Man zeige, dass durch H µ in (13.54) tatsächlich ein Vektorfeld definiert wird. Man stelle
dazu die rechte Seite der Gleichungen in zwei verschiedenen Koordinatensystemen dar und zeige, dass
sich das richtige Transformationsverhalten ergibt.
Aufgabe 13.25 Eine andere Kombination von Ableitungen, die ein Tensorfeld wieder auf ein Tensorfeld
abbildet, ist die folgende. Wenn Aµ ein duales Vektorfeld ist, so definieren wir die antisymmetrisierte
Ableitung durch
Bµν = ∂µ Aν − ∂ν Aµ .
(13.55)
Man zeige, dass Bµν ein Tensorfeld der Stufe (0, 2) ist.
Die Lagrange-Funktion
Abschließend wollen wir noch einmal auf die eigentliche Fragestellung zurück kommen, die uns zur Definition einer Mannigfaltigkeit führte. Wie ordnet sich die Langrangesche Beschreibung eines mechanischen
Systems mit Zwangsbedingungen in dieses Konzept ein?
Wir hatten gezeigt, dass der reduzierte Konfigurationsraum Q eines Systems mit holonomen Zwangse betrachtet werden kann, wobei die
bedingungen als Teilmenge eines erweiterten Konfigurationsraumes Q
Teilmenge gerade die Lösungsmenge der Zwangsbedingungen ist. Der reduzierte Konfigurationsraum ist
laut dieser Definition immer in einen höherdimensionalen, affinen Raum eingebettet, zum Beispiel den
3 N -dimensionalen Konfigurationsraum eines N -Teilchen-Systems.
Wir hatten dann aber gesehen, dass wir diese Einbettung gar nicht benötigen, um die Bewegungsgleichungen zu formulieren. Es genügt, die Bahn des Systems als Kurve q(t) im reduzierten Konfigurationsraum Q zu beschreiben. Dieser Raum ist im allgemeinen eine glatte Mannigfaltigkeit. Die Bahn eines
mechanischen System ist demnach eine parametrisierte Kurve auf einer glatten Mannigfaltigkeit. Um die
Dynamik des Systems zu beschreiben, müssen wir diese Mannigfaltigkeit nicht irgendwo einbetten. Allerdings müssen wir dann einige der in den Bewegungsgleichungen vorkommenden Größen neu interpretieren, wenn wir deren geometrische Bedeutung verstehen wollen.
So ist zum Beispiel die Geschwindigkeit q̇(t) nicht mehr einfach ein Vektor, sondern ein Vektor im
Tangentenraum T (t) Q, also an dem Ort im Konfigurationsraum, an der sich das System gerade befindet.
Folglich sollten wir auch noch einmal überdenken, wie eigentlich die Lagrange-Funktion L definiert ist.
Es ist eine Funktion des Ortes q, der Geschwindigkeit q̇, und möglicherweise der Zeit t. Nun ist es aber
sinnlos, von einer Geschwindigkeit q̇ zu sprechen, ohne den Bezugspunkt dieses Vektors festzulegen, also
ohne gleichzeitig den Ort q anzugeben.
111
Was also ist der Definitionsbereich von L? Es ist die Menge aller Bewegungszust ände, wobei ein Bewegungszustand durch ein Paar (q, q̇) gegeben ist, mit q ∈ Q und q̇ ∈ T M. Der Raum aller dieser
Bewegungszustände hat einen speziellen Namen. Es ist das Tangentenb ündel T(Q) von Q. Wir können
diesen Raum als die Vereinigung aller Tangentenräume betrachten,
[
(13.56)
T(Q) =
T M.
∈M
Die Bezeichung “Bündel” ergibt sich aus der anschaulichen Vorstellung, dass wir alle Tangentenräume
einer Mannigfaltigkeit quasi zu einem Bündel zusammenschnüren. Für die Sphäre S 2 ist T(S2 ) die Vereinigung aller an die Sphäre angehefteten Ebenen. Drei davon sind in Abbildung 13.5(b) dargestellt. An
jedem Punkt auf der zweidimensionalen Sphäre ist eine zweidimensionale Ebene angeheftet. Wenn wir
diese Ebenen zusammenschnüren, ergibt sich ein vierdimensionaler Raum.
Tatsächlich ist das Tangentenbündel T(Q) einer Mannigfaltigkeit Q selbst wieder eine Mannigfaltigkeit,
wobei dim T(Q) = 2 dim Q gilt. Ist {q µ } ein Koordinatensystem auf Q, so bilden diese Koordinaten
und die zugehörigen Geschwindigkeiten, also ({q µ }, {q̇ µ }), zusammen ein Koordinatensystem auf T(Q),
denn durch die Koordinaten {q µ } wird eindeutig ein Punkt q ∈ Q, und durch die Geschwindigkeiten {q̇ µ }
eindeutig ein Vektor q̇ ∈ T Q definiert.
In diesem Sinne ist das Tangentenbündel T(Q) der Zustandsraum des mechanischen Systems, den wir in
Kapitel 3 als denjenigen Raum eingeführt haben, in dem sich die Bewegungen eines dynamischen Systems
abspielen. Wenn wir einen Punkt (q, q̇) ∈ T(Q) vorgeben und die Lagrange-Funktion L kennen, die eine
Funktion auf diesem Raum ist, dann können wir die Zeitentwicklung des Systems für alle Zeiten in der
Zukunft und in der Vergangenheit berechnen.
Das Tangentenbündel des reduzierten Konfigurationsraumes eines mechanischen Systems hat somit
zwei physikalische Bedeutungen. Zum einen ist es der Raum aller Bewegungszustände, so dass die Bewegungen des Systems festgelegt sind, sobald wir zu einem Zeitpunkt wissen, an welcher Stelle im diesem
Raum sich das System gerade befindet. Zum anderen ist es auch der Definitionsbereich der LagrangeFunktion, wenn dem System eine solche Funktion zugeordnet werden kann.
Die Lagrange-Funktion L eines mechanischen ist eine reelle Funktion auf dem Tangentenbündel T(Q) des Konfigurationsraumes Q.
In Kapitel 15 werden wir eine alternative Beschreibung dieses Raumes aller Bewegungszustände präsentieren, die eine noch etwas elegantere Formulierung der Bewegungsgleichungen erlaubt. Entscheidend ist
jedoch, dass wir bereits an dieser Stelle eine sehr “geometrische” Formulierung der klassischen Mechanik gefunden haben, die wir später als Ausgangspunkt zum Beweis von einigen allgemeinen Sätzen, zum
Beispiel über Symmetrien und Erhaltungssätze, benutzen werden.
Aufgabe 13.26 Der spezielle, aus partiellen und totalen Ableitungen gebildete Ausdruck
d ∂L
∂L
,
µ −
dt ∂ q̇
∂q µ
(13.57)
wie er auf der linken Seite der Lagrangeschen Bewegungsgleichungen steht, ist erst sinnvoll, wenn wir f ür
q eine Bahn q(t) einsetzen, denn erst dann ist definiert, was die totale Ableitung d/dt bedeutet. Nehmen
wir also an, wie hätten eine solche Bahn gegeben und L sei eine Funktion auf dem Tangentenb ündel T(Q).
Dann ist der Ausdruck (13.57) eine Funktion der Zeit. Man zeige, dass es sich zu jedem Zeitpunkt t um
die Komponenten eines dualen Vektor aus T∗ (t) M handelt. Die beiden Summanden für sich sind jedoch
nicht die Komponenten von dualen Vektoren. Sie transformieren nicht in der richtigen Art und Weise unter
Koordinatentransformationen. Daher ist nur diese spezielle in den Bewegungsgleichungen auftretende
Kombination eine sinnvolle Größe, nicht aber die einzelnen Summanden.
112
14 Das Wirkungsprinzip
Mit den d’Alembertschen bzw. Lagrangeschen Bewegungsgleichungen haben wir eine elegante geometrische Formulierung der Bewegungsgleichungen für ein allgemeines mechanisches System gefunden. Im
Prinzip handelt es sich aber immer noch um dieselben Newtonschen Gleichungen, mit denen wir im Teil I
gearbeitet haben. Wir haben sie nur in eine etwas allgemeinere Form gebracht und in eine geometrische
Sprache übersetzt, aber inhaltlich hat sich an den Bewegungsgleichungen nichts geändert.
In diesem Kapitel wollen wir zeigen, dass sich die Bewegungen eines mechanischen Systeme auch
auf eine ganz andere Art und Weise beschreiben lassen. Man geht dabei nicht von Kräften als Ursachen
von Bewegungen aus, und von Massen als Eigenschaften von Teilchen. Statt dessen stellt man ein Extremalprinzip auf. Die Behauptung ist, dass ein mechanisches System unter allen denkbaren Bahnen gerade
diejenige Bahn realisiert, für die eine bestimmte Funktion, die man Wirkung nennen, ein Extremum annimmt.
Diese Zugangsweise zu den grundlegenden Gesetzen der Mechanik ist eine völlig andere, da man mit
ihr auch eine ganz andere Funktionsweise von Naturgesetzen verbindet. Die Bewegungen von einzelnen
Teilchen werden nicht mehr, wie es Newtons Vorstellung entsprach, dadurch gesteuert, dass Kräfte auf
sie einwirken und jedes Teilchen sich mit seiner Trägheit den Einflüssen der Kräfte entgegen stellt. Statt
dessen besitzt ein mechanisches System als ganzes das Bestreben, eine bestimmte Größe zu minimieren,
etwa so wie ein Pendel im Ruhezustand das bestreben hat, nach unten zu hängen, also sein Energie zu
minimieren.
Im Rahmen der klassischen Mechanik ist diese Vorstellung zunächst etwas ungewöhnlich. Geht man
nämlich von der anschaulichen Vorstellung aus, dass sich einzelne Objekte im Raum bewegen und dabei
durch Wechselwirkungen miteinander kommunizieren, so ist die Newtonsche Beschreibung viel natürlicher. Dass sich ein mechanisches System als ganzes ausgerechnet so verhält, dass eine bestimmte Funktion seiner Bewegungsgrößen minimal wird, erscheint zumindest sonderbar und führt fast zwangsläufig zu
der Vorstellung, dass es wohl irgendeine höhere Instanz geben muss, die eine Kontrolle über das System
ausübt.
Tatsächlich liefert die klassische Mechanik selbst keine Erklärung dafür, warum es ein solches Wirkungsprinzip gibt. Nicht jede in der Newtonschen Beschreibung mögliche Bewegungsgleichung lässt sich
nämlich auf diese Weise herleiten. Man stellt aber fest, dass gerade für diejenigen mechanischen Systeme
ein Wirkungsprinzip existiert, die durch fundamentale Wechselwirkungen beschrieben werden können,
also zum Beispiel allein durch elektromagnetische und Gravitationskräfte. Es sind genau die, für die ein
auch Lagrange-Funktion existiert.
Eine Erklärung für das Wirkungsprinzip findet man erst, wenn man zu einer noch fundamentaleren Beschreibung der Phänomene übergeht, nämlich zur Quantenmechanik. Im Rahmen dieser Theorie lassen
sich nämlich nur solche Wechselwirkungen beschreiben, die aus einem Wirkungsprinzip abgeleitet werden können. Wenn wir also annehmen, dass letztlich alle fundamentalen physikalischen Theorien Quantentheorien sind, dann muss auch allen fundamentalen Wechselwirkungen ein Wirkungsprinzip zugrunde
liegen.
Extremal- und Variationsprobleme
Eine typische Aufgabe der Analysis ist es, die Extrema einer gegebenen Funktion zu finden. Eine solche
Aufgabe bezeichnet man als Extremalproblem. Anhand von einfachen Beispielen wollen wir die wichtigsten Eigenschaften solcher Extremalprobleme zusammenstellen und ein paar nützliche Begriffe einführen.
Der einfachste Fall liegt vor, wenn wir die Extrema einer differenzierbaren Funktion h : R → R suchen.
Eine notwendige Bedingung für das Vorliegen eines Extremums bei x 0 ∈ R ist h0 (x0 ) = 0. Gilt außerdem
h00 (x0 ) > 0, so handelt es sich um ein lokales Minimum. Wenn f 00 (x0 ) < 0 ist, liegt ein lokales Maximum
113
vor. Für f 00 (x0 ) = 0 muss man höhere Ableitungen betrachten, um zu entscheiden, ob es sich um einen
Sattelpunkt oder ein Extremum handelt.
Etwas komplizierter wird es, wenn wir die Extrema einer Funktion h : M → R suchen, wobei M
eine beliebige glatte Mannigfaltigkeit ist. Ein typisches Beispiel dafür wäre die Suche nach den stabilen
Gleichgewichtslagen eines mechanischen System. Das sind die lokalen Minima des Potenzials, also die
einer reellen Funktion auf dem Konfigurationsraum des Systems. Wie wir aus dem letzten Kapitel wissen,
ist dies im allgemeinen eine glatte Mannigfaltigkeit.
Das Problem, die Extrema einer Funktion auf einer Mannigfaltigkeit M zu finden, lässt sich wie folgt
auf des einfachere Problem zurückführen, die Extrema von Funktionen auf R zu finden. Wenn die Funktion
x 7→ h(x) am Punkt x = x0 ein Maximum hat, so hat auch die Funktion s 7→ h(λ(s)) an der Stelle s = 0
ein Maximum, wenn die Kurve λ(s) durch den Punkt λ(0) = x0 läuft. Dasselbe gilt entsprechend für ein
Minimum.
Daraus ergibt sich die folgende notwendige Bedingung für das Vorliegen eines Extremums einer Funktion x 7→ h(x) an der Stelle x = x0 . Für jede Kurve λ(s) mit λ(0) = x0 muss die Ableitung der Funktion
s 7→ h(λ(s)) an der Stelle s = 0 verschwinden. Diese Ableitung ist die Richtungsableitung von h(x) an
der Stelle x0 = λ(0) in Richtung des Tangentenvektors v0 = λ0 (0),
dh(λ(s)) = λ0 (0) · ∇h(λ(0)) = v0 · ∇h(x0 ) = 0.
(14.1)
ds
s=0
Dies muss für alle möglichen Kurven und damit auch für alle Vektoren v 0 ∈ T 0 M gelten. Folglich
müssen alle Richtungsableitungen von h(x) an der Stelle x = x0 verschwinden, oder äquivalent dazu, es
muss ∇h(x0 ) = 0 sein.
Wir sagen, dass eine Funktion h an der Stelle x0 stationär ist, wenn ∇h(x0 ) = 0 ist. Wir verbinden
damit die folgende anschauliche Vorstellung. Wir befinden uns am Ort x 0 ∈ M und werten dort die
Funktion h aus. Nun bewegen wir uns vom Ort x0 weg, in Richtung eines Vektors v0 ∈ T 0 M. Dann
können wir uns fragen, wie sich der Wert der Funktion h ändert. Genau diese Änderung wird durch die
Richtungsableitung von h an der Stelle x0 in Richtung des Vektors v0 beschrieben.
Eine Funktion h heißt also genau dann an einem Ort x0 ∈ M stationär, wenn sich der Funktionwert von
h nicht ändert, wenn wir uns in irgendeine Richtung von x0 weg bewegen. Das ist folglich eine notwendige
Bedingung dafür, dass die Funktion an der betreffenden Stelle ein Extremum besitzt.
Wenn eine Funktion h : M → R am Punkt x0 ∈ M ein Extremum besitzt, so ist sie dort
stationär.
Es ist nützlich, die folgende Schreibweise zu verwenden, wenn es darum geht, ein konkretes Extremalproblem zu lösen. Wenn wir uns an einem Punkt x ∈ M befinden und dort die Richtungsableitung einer
Funktion h(x) berechnen wollen, so bezeichnen wir den Richtungsvektor mit δx ∈ T M und nennen ihn
die Variation des Punktes x. Die resultierende Richtungsableitung schreiben wir als
Variation
δh(x) = δx · ∇h(x) = δxµ
∂h
,
∂xµ
(14.2)
und nennen sie die Variation von h(x). Mit anderen Worten, wie variieren zuerst den Punkt x, indem wir
ihn in Richtung eines Vektors δx verschieben, und fragen dann nach der daraus resultierenden Variation
δh(x) der Funktion h(x).
Ein Extremalproblem ist deshalb zunächst ein Variationsproblem. Gesucht sind diejenigen Punkte
x ∈ M, an denen eine gegebene Funktion h(x) stationär ist. Das ist genau dort der Fall, wo die Variation δh(x) für alle Variationen δx verschwindet. Das ist natürlich wieder äquivalent zum Verschwinden
des Gradienten ∇h(x). Im Grunde haben wir also nur ein paar neue Begriffe eingeführt, um denselben
Sachverhalt mit anderen Worten darzustellen.
114
Die neue Schreib- und Sprechweise hat aber mehrere sehr nützliche Vorteile. So müssen wir zum Beispiel kein zusätzliches Symbol mehr verwenden, um den Vektor für die Richtungsableitung zu bezeichnen.
Die Variation δx entspricht dem Vektor v für die Richtungsableitung. Außerdem verhält sich das Variationssymbol δ wie ein Ableitungsoperator, für den die Produkt- und Kettenregel gilt. Der rechte Ausdruck
in (14.2), also die Koordinatendarstellung der Richtungsableitung von h, ist letztlich nichts anderes als
eine spezielle Schreibweise für die Kettenregel. Wenn wir uns vorstellen, dass x und damit die Koordinaten xµ von einer Variablen s abhängen, so können wir δ durch d/ds ersetzen und bekommen die übliche
Ableitung einer Funktion entlang einer Kurve.
Den Umgang mit dem Variationssymbol δ wollen wir an zwei einfachen Beispielen erläutern. Als erstes
betrachten wir eine Funktion h : S2 → R, die wir in Kugelkoordinaten durch
h(ϑ, ϕ) = sin ϑ sin ϕ + cos ϑ
(14.3)
darstellen. Man kann sich leicht davon überzeugen, dass es sich um eine überall differenzierbare Funktion
auf S2 handelt, indem man sie in die Nord- bzw. Süd-Karte umrechnet.
Wo befinden sich die Extrema dieser Funktion? Wir berechnen die Variation δh(ϑ, ϕ) der Funktion, die
sich aus einer von Variation (δϑ, δϕ) der Koordinaten ergibt. Das Symbol δ verwenden wir bei der Rechnung so, als wäre des die Ableitung d/ds nach einem Kurvenparameter s, und als seien die Koordinaten
(ϑ, ϕ) Funktionen dieses Parameters. Das ergibt
δh(ϑ, ϕ) = δ (sin ϑ sin ϕ + cos ϑ) = δ (sin ϑ sin ϕ) + δ (cos ϑ)
= δ (sin ϑ) sin ϕ + sin ϑ δ (sin ϕ) + δ (cos ϑ)
= cos ϑ sin ϕ δϑ + sin ϑ cos ϕ δϕ − sin ϑ δϑ.
(14.4)
Wir haben hier jeden einzelnen Schritt der Rechnung ausgeschrieben, weil jede der drei definierenden
Eigenschaften eines Ableitungsoperators mindestens einmal auftritt. Die Linearität in der ersten Zeile, die
Produktregel in der zweiter Zeile, und die Kettenregel in der dritten Zeile. Durch den Vergleich mit der
allgemeinen Formel (14.2) können wir die Komponenten ∂h/∂ϑ und ∂h/∂ϕ des Gradienten ablesen.
Der interessiert uns aber gar nicht, sondern wir wollen wissen, wo die Funktion h stationär ist. Dazu
muss die rechte Seite von (14.4) für alle Variationen δϕ und alle δϑ verschwinden. Offenbar ist das genau
dann der Fall, wenn
cos ϑ sin ϕ = sin ϑ und sin ϑ cos ϕ = 0
(14.5)
ist. Man sieht leicht, dass diese Gleichungen im Definitionsbereich der Kugelkoordinaten zwei Lösungen
haben, nämlich ϑ = π/4 und ϕ = π/2, oder ϑ = 3π/4 und ϕ = 3π/2. Das sind zwei einander gegenüberliegende Punkte auf der Sphäre, wenn man sie in den dreidimensionalen Raum einbettet, und zwar die
Schnittpunkte der Kugeloberfläche mit der Winkelhalbierenden in der y-z-Ebene. Tatsächlich liegen dort
die Extrema der gegebenen Funktion, die sich auch in der Form h(ϑ, ϕ) = y(ϑ, ϕ) + z(ϑ, ϕ) darstellen
lässt, wobei (x, y, z) die üblichen Einbettungskoordinaten in den dreidimensionalen Raum sind.
Das Beispiel ist zwar nicht sehr tiefsinnig, sollte aber deutlich machen, dass die Variationsschreibweise
eine sehr kompakte Notation erlaubt, wenn es darum geht, konkret die Richtungsableitung einer Funktion
zu berechnen. Die Rechnung lässt sich in der Form (14.4) meist etwas übersichtlicher darstellen als die
entsprechende Rechnung, bei der wir zuerst die Komponenten des Gradienten ausrechnen und diese dann
gleich Null setzen. Wir rechnen quasi alle Komponenten des Gradienten auf einmal aus, statt der Reihe
nach alle partiellen Ableitungen nach den Koordinaten.
Ein anderes Beispiel soll zeigen, dass die Variationrechnung auch ohne die Verwendung von Koordinaten sehr schnell zum Ziel führen kann. Diesmal sei E ein metrischer affiner Raum beliebiger Dimension,
a und b zwei ausgewählte Punkte in E und
h(x) = (x − a) · (x − b).
115
(14.6)
Für welchen Punkt x ist dieses Skalarprodukt minimal? Wir berechnen die Variation
δh(x) = δ (x − a) · (x − b) + (x − a) · δ (x − b)
= δx · (x − b) + δx · (x − a) = δx · (2 x − a − b),
(14.7)
die genau dann für alle δx verschwindet, wenn x = (a + b)/2 ist, also wenn der Punkt x genau in der
Mitte zwischen a und b liegt. Tatsächlich ist dort das Skalarprodukt der Abstandsvektoren x−a und x−b
minimal. Es gilt nämlich
a−b
a+b
a + b 2 a − b 2
2
h(x) = x −
−
≥−
=h
2
2
2
2
(14.8)
Von dieser koordinatenfreien Schreibweise werden wir in den folgenden Abschnitten Gebrauch machen,
wenn es darum geht, spezielle Variationsproblem zu lösen, die auf unendlich-dimensionalen Räumen definiert sind. Dort existieren nämlich keine Koordinaten im üblichen Sinne, wohl aber Richtungsableitungen
und somit auch das Konzept, das hinter dem Begriff einer Variation steht.
Aufgabe 14.1 Man stelle die Funktion (14.3) in den Nord-Koordinaten (u (N) , v(N) ) dar, berechne die Variation δh als Funktion von (δu(N) , δv(N) ) und zeige, dass sich dieselben Punkte ergeben, an denen die
Funktion stationär ist.
Aufgabe 14.2 Die Punkte a, b, c bilden ein nicht entartetes Dreieck im dreidimensionalen Euklidischen
Raum. Die Funktion h(x) sei das Volumen des Tetraeders mit den Ecken a, b, c und x, also
1
h(x) = (x − a) · (x − b) × (x − c) .
6
(14.9)
Man berechne die Variation δh(x) unter einer Variation δx. Man zeige, dass der Gradient ∇h(x) konstant
ist und seine Richtung durch den Normalenvektor des Dreiecks gegeben ist. Dies l ässt sich ganz ohne die
Verwendung von Koordinaten zeigen.
Aufgabe 14.3 Für eine Funktion φ : M → R bestimmen wir an der Stelle x0 ∈ M innerhalb des
Abdeckungsbereiches eines Koordinatensystems {xµ } die ersten und zweiten partiellen Ableitungen und
finden
∂ 2 φ ∂φ =
0,
= Bµν .
(14.10)
∂xµ = 0
∂xµ ∂xν = 0
Die Funktion φ(x) ist folglich an der Stelle x = x0 stationär. Man zeige, dass dann Bµν die Darstellung
eines Tensors B ∈ T (0,2) M ist. Aus welcher hinreichenden Bedingung an die Matrix Bµν folgt, dass φ(x)
an der Stelle x = x0 ein Minimum hat?
Aufgabe 14.4 Der Konfigurationsraum Q des Doppelpendels aus Abbildung 12.2 ist ein Torus, der durch
ein periodisches Koordinatensystem (α, β) mit α ≡ α + 2π und β ≡ β + 2π erfasst werden kann. Man
betrachte die potenzielle Energie des Pendels als Funktion V : Q → R. Wo liegen die Extrema dieser
Funktion? Handelt es sich dabei um Minima oder Maxima?
Funktionenräume und Funktionale
Die interessanten Variationsprobleme, die in der Physik auftreten, betreffen Funktionen, die von unendlich vielen Variablen abhängen. Ein typisches Problem dieser Art ist, die kürzeste Verbindung zwischen zwei Punkten in einem metrischen Raum zu finden. Wir wollen dieses Beispiel als Prototyp eines
116
unendlich-dimensionalen Variationsproblems benutzen, um zu zeigen, wie die gerade eingeführte Schreibund Sprechweise verallgemeinert werden kann.
Zunächst formulieren wir das Problem in einer etwas vereinfachten Form. Es sei eine differenzierbare
Funktion f : R → R gegeben. Ihr Graf definiert eine Kurve y = f (x) in der x-y-Ebene. Es seien zwei
Punkte (x1 , y1 ) und (x2 , y2 ) gegeben, mit x2 > x1 , und wir betrachten nur solche Funktionen, deren Graf
beide Punkte enthält, also f (x1 ) = y1 und f (x2 ) = y2 .
Dann können wir die Länge des Grafen zwischen den beiden Punkten wie folgt berechnen. Wir zerlegen
die Kurve, wie in Abbildung 14.1(a) gezeigt, in infinitesimal kleine Stücke, deren Längen durch
dx 2
2
2
2
2
dx2 = (1 + f 0 (x)2 ) dx2
(14.11)
d` = dx + dy = dx +
dy
gegeben sind. Anschließend integrieren wir diese Längenelemente, und erhalten so den folgenden Ausdruck für die Länge des Grafen zwischen den Punkten (x1 , y1 ) und (x2 , y2 ),
L[f ] =
2
Z xq
1 + f 0 (x)2 dx.
(14.12)
x1
Nun betrachten wir dies als eine Abbildung L : f 7→ L[f ]. Sie ordnet jeder Funktion f , die auf dem
Intervall x1 ≤ x ≤ x2 differenzierbar ist und die Randwerte f (x1 ) = y1 und f (x2 ) = y2 annimmt, eine
reelle Zahl L[f ] zu.
Eine solche Abbildung, deren Argument selbst eine Funktion ist, wird als Funktional bezeichnet, wobei
man das Argument in eine eckige Klammer schreibt. Das ist aber nur eine sprachliche Vereinbarung, da es
manchmal ein wenig verwirrend ist, wenn man von einer Funktion spricht, deren Argument wieder eine
Funktion ist. Ein Funktional ist nur ein neues Wort, aber kein neues Konzept. Es handelt sich um eine
Abbildung eines Funktionenraumes in die reellen Zahlen.
Aufgabe 14.5 Wie muss man den Abstandsvektor zwischen zwei Funktionen f 1 und f2 definieren, damit
der Raum der Funktionen, auf dem die Abbildung L definiert ist, zu einem affinen Raum wird? Was ist
dann der zugeordnete Vektorraum?
Wenn wir nun die Frage stellen, welches die kürzeste Verbindung zwischen den beiden Punkten ist, so ist
dies gleichbedeutend mit der Frage, an welcher Stelle, also für welche Funktion f das Funktional L[f ]
minimal wird. Es handelt sich um ein Variationsproblem im Sinne des letzten Abschnitts. Wir müssen
diejenigen Stellen im Raum aller zulässigen Funktionen f finden, an denen eine skalare Funktion, oder
genauer ein Funktional stationär ist.
Das Problem ist nun, dass dieser Raum eine unendliche Dimension hat. Funktionenräume sind im allgemeinen keine endlich-dimensionalen Räume. Wir können daher kein Koordinatensystem im üblichen
Sinne einführen und die partiellen Ableitungen nach den Koordinaten berechnen. Wir können aber immer
noch eine Richtungsableitung definieren, ohne dass wir dafür Koordinaten benötigen.
Wir stellen uns wieder vor, dass wir uns an einer bestimmten “Ort” im Funktionenraum befinden, also
bei einer Funktion f . Wenn wir von dort aus in eine bestimmte “Richtung” gehen, so bedeutet das, dass
wir zu der Funktion f eine andere Funktion g addieren. Wir führen einen Parameter ein, der angibt, wie
weit wir schon gegangen sind. Wir betrachten also die Funktion
f (x) + g(x),
mit f (x1 ) = y1 ,
f (x2 ) = y2 ,
g(x1 ) = 0,
g(x2 ) = 0.
(14.13)
Die ersten beiden Bedingungen sind diejenigen, die den Funktionenraum definieren, in dem die Funktion
f liegen soll. Die Bedingungen an g, an den Rändern des Intervalls zu verschwinden, ergibt sich aus der
Forderung, dass wir innerhalb der Funktionenraumes bleiben müssen, wenn wir die Funktion verändern.
117
(d)
y
y
y
f +g
y2
d`
y2
dy
dx
f
y1
x
(a)
y1
x
x1
x2
(b)
x
x1
x2
(c)
Abbildung 14.1: Die Kurvenlänge eines Grafen (a) ergibt sich durch Integration der Linienelemente d`.
Um festzustellen, ob die Kurvenlänge eines bestimmten Grafen extremal ist, betrachtet man eine Schar
von Funktionen (b), die sich von der gegebenen Funktion f um das Vielfache einer Funktion g unterscheiden. Unter allen Kurven, die zwei feste Punkte miteinander verbinden, findet man schließlich die
Gerade (c) als die kürzeste.
Auch die Funktion f + g muss, für alle , die gestellten Randbedingungen erfüllen, da wir uns sonst nicht
innerhalb des Funktionenraumes bewegen, auf dem das Funktional L definiert ist.
Nun können wir uns fragen, wie sich die Länge des Grafen verändert, wenn wir uns von der Funktion
f aus in die Richtung der Funktion g bewegen. In diesem Sinne ist f der Ort, an dem wir uns befinden,
und g ist der Vektor, der abgibt, in welche Richtung wir uns im Funktionenraum bewegen. Die typische
Situation ist in Abbildung 14.1(b) dargestellt. Für jedes ergibt sich ein anderer Graf, der folglich auch
eine andere Länge hat, nämlich
2
Z xq
L[f + g] =
1 + (f 0 (x) + g 0 (x))2 dx.
(14.14)
x1
Jetzt können wir wie üblich die Richtungsableitung berechnen. Wir betrachten den Ausdruck (14.14) als
gewöhnliche reelle Funktion von einer reellen Variablen , und bilden die Ableitung an der Stelle = 0,
dL[f + g] L[f + g] − L[f ]
.
(14.15)
= lim
→0
d
=0
Diese Ableitung können wir leicht berechnen. Da die Integralgrenzen nicht von abhängen, wirkt die
Ableitung nur auf den Integranden. Es ist
d
d
2
Z xq
Z x2 0
(f (x) + g 0 (x)) g 0 (x)
0
0
2
p
1 + (f (x) + g (x)) dx =
dx.
1 + (f 0 (x) + g 0 (x))2
x1
(14.16)
x1
Jetzt müssen wir nur noch = 0 setzen, und bekommen für die gesuchte Richtungsableitung
Z x2 0
f (x) g 0 (x)
dL[f + g] p
=
dx.
d
=0
1 + f 0 (x)2
(14.17)
x1
Dieses Integral gibt an, wie sich die Länge eines Grafen verändert, wenn wir die Funktion f in die Richtung
der Funktion g verändern.
118
Aufgabe 14.6 In welchem Sinne definiert der Ausdruck auf der rechten Seite in (14.17) den “Gradienten”
von L an der Stelle f ? Man bedenke, dass der Gradient ein dualer Vektor ist, also eine lineare Abbildung.
Um welchen Vektorraum handelt es sich hier, und auf welchen Vektor wirkt die lineare Abbildung?
Jetzt können wir uns der Frage zuwenden, für welche Funktionen f das Funktional L[f ] stationär ist.
Das ist genau dann der Fall, wenn die Richtungsableitung von L[f ] in alle Richtungen verschwindet. Mit
anderen Worten, die rechte Seite von (14.17) muss für alle Funktionen g Null ergeben.
Um daraus eine Bedingung an die Funktion f abzuleiten, entfernen wir zunächst die Ableitung g 0 (x),
die unter dem Integral steht, durch eine partielle Integration. Es gilt
Z x2 0
h f 0 (x) g(x) ix=x2 Z x2 d f (x) g 0 (x)
f 0 (x)
p
p
dx = p
g(x) dx.
−
dx
1 + f 0 (x)2
1 + f 0 (x)2 x=x1
1 + f 0 (x)2
x1
(14.18)
x1
Der erste Term verschwindet, denn nach Voraussetzung ist g(x) an den Rändern des Intervalls gleich Null.
Es muss also der zweite Ausdruck für alle möglichen Funktionen g verschwinden. Da der Funktionswert
von g an jeder Stelle innerhalb des Intervalls beliebig ist, kann das nur dann der Fall sein, wenn der Rest
des Integranden gleich Null ist. Die Bedingung lautet also
f 0 (x)
d
p
=0
dx
1 + f 0 (x)2
⇔
f 0 (x)
p
= konst
1 + f 0 (x)2
⇔
f 0 (x) = konst.
(14.19)
Das Funktional L[f ] ist genau dann an der Stelle f stationär, wenn die Funktion f linear ist. Es gibt genau
eine lineare Funktion, die die gestellten Randbedingungen erfüllt, nämlich
f (x) =
y2 (x − x1 ) + y1 (x2 − x)
.
x2 − x 1
(14.20)
Tatsächlich liegt an dieser Stelle ein Minimum des Funktionals L[f ] vor. Die Gerade ist die kürzeste Verbindung von zwei Punkten. Es ist die einzige Stelle im Funktionenraum, an der alle Richtungsableitungen
von L verschwinden.
Aufgabe 14.7 Man löse folgendes, leicht verändertes Extremalproblem. Die Funktionswerte von f an
den Rändern des Intervalls seien nicht festgelegt. Das heißt, f ist irgendeine differenzierbare Funktion
auf dem Intervall x1 ≤ x ≤ x2 . Welche zusätzliche Bedingung ergibt sich nun für die Funktion f , wenn
L[f ] stationär sein soll? Welches ist jetzt die Funktion mit dem kürzesten Grafen? Ist sie eindeutig? Ist das
Ergebnis das, was man erwartet?
Aufgabe 14.8 Eine Kurve in der Euklidischen Ebene werde in Polarkoordinaten (r, ϕ) durch eine Funktion r = f (ϕ) beschrieben. Auf diese Weise hatten wir zum Beispiel die Keplerschen Ellipsen in Kapitel 8 beschrieben. Man zeige, dass die Länge der Kurve zwischen zwei Punkten (r1 , ϕ1 ) und (r2 , ϕ2 ) mit
ϕ2 > ϕ1 durch
2
Z ϕp
L[f ] =
f (ϕ)2 + f 0 (ϕ)2 dϕ
(14.21)
ϕ1
gegeben ist, wobei die Funktion f die Randbedingungen f (ϕ 1 ) = r1 und f (ϕ2 ) = r2 erfüllt. Man bestimme die Funktion f , für die dieses Funktional stationär wird, und zeige anschließend, dass es sich
um die Darstellung einer geraden Strecke in Polarkoordinaten handelt. Welche Einschr änkung muss man
an ϕ1 und ϕ2 machen, damit dieses Variationsproblem überhaupt eine Lösung hat? Welche geometrische
Begründung gibt es dafür?
119
Die Eulersche Gleichung
Wir wollen das Verfahren, das wir soeben verwendet haben, um ein bestimmtes Extremalproblem zu lösen,
nun ein wenig systematischer analysieren. Wir betrachten wieder eine Funktion f (x), die auf einem Intervall x1 ≤ x ≤ x2 definiert ist. Sie soll hinreichend oft differenzierbar sein, damit alle Ausdrücke, die im
folgenden auftreten, wohldefiniert sind.
Es zeigt sich, dass ein sehr große Klasse von Extremalproblemen auf die folgende allgemeine Form
gebracht werden kann. Das Funktional, das extremal werden soll, ist als Integral über x gegeben, wobei
der Integrand von f (x), den ersten n Ableitungen f 0 (x), f 00 (x), . . ., f (n) (x), sowie von x selbst abhängt,
also
Z x2
(14.22)
S[f ] = L f (x), f 0 (x), f 00 (x), . . . , f (n) (x), x dx.
x1
Hierbei ist L(y0 , y1 , . . . , yn , x) eine gewöhnliche reelle Funktion mit n + 2 Argumenten wobei für diese
die gesuchte Funktion und ihren ersten n Ableitungen an der Stelle x, sowie x selbst einzusetzen sind.
Anschließend ist dieser Ausdruck über x zu integrieren.
Um herauszufinden, für welche Funktionen f dieses Funktional stationär ist, bilden wir die Richtungsableitung von S[f ] in die Richtung einer Funktion g. Wir betrachten also die Ableitung
Z x2
d
d
S[f + g]
=
L y0 + z0 , y1 + z1 , . . . , yn + zn , x dx ,
d
d
=0
=0
(14.23)
x1
wobei wir yk = f (k) (x) und zk = g (k) (x) als Abkürzungen für die Werte der Funktionen und ihrer
Ableitungen an der Stelle x verwendet haben. Diese hängen natürlich nicht von ab, so dass wir sie bei
der Ableitung nach als Konstanten betrachten können. Das gleiche gilt für die Integralgrenzen, so dass
wir die Ableitung nach auf den Integranden wirken lassen können. Das ergibt
2
Z x
n
X
∂L
d
=
S[f + g]
y0 , y1 , . . . , yn , x zk dx.
d
=0
∂yk
k=0
(14.24)
x1
Diese Richtungsableitung können wir auch als Variation des Funktionals S[f ] darstellen. Dazu schreiben
wir f (x) + δf (x) statt f (x) + g(x), wobei δf (x) die Variation der Funktion f (x) ist. Die anschauliche
Vorstellung ist die, dass wir an der Funktion f (x) ein wenig “wackeln”, so dass sich eine veränderte
Funktion f (x)+δf (x) ergibt. Die Variation δf (x) ist dann auch eine Funktion auf dem Intervall x 1 ≤ x ≤
x2 . Gegebenenfalls muss sie gewissen Randbedingungen genügen, wenn entsprechende Randbedingungen
an die Funktion f (x) gestellt sind.
Wenn wir die Funktion f (x) verändern, ändert sich auch ihre Ableitung. Da das Ableiten eine lineare
Operation ist, ist die Variation der Ableitung f 0 (x) gleich der Ableitung der Variation δf (x) nach x. Wir
schreiben dafür δf 0 (x), wobei es unerheblich ist, ob hier quasi zuerst der Strich und dann das Delta wirkt,
oder umgekehrt erst das Delta und dann der Strich. Es spielt keine Rolle, ob wir eine Funktion erst ableiten
und dann variieren oder erst variieren und dann ableiten. Das gleiche gilt natürlich auch für alle höheren
Ableitungen.
Statt (14.24) können wir nun auch schreiben
δS[f ] =
2
Z x
n
X
x1
k=0
(k) ∂L
0
(n)
f
(x),
f
(x),
.
.
.
,
f
(x),
x
δf (x) dx,
∂f (k)
(14.25)
wobei ∂L/∂f (k) die partielle Ableitung nach dem entsprechenden Argument der Funktion L bezeichnet.
120
Der Vorteil dieser Schreibweise ist, dass wir das nicht explizit ausschreiben müssen und für die Richtung, in die wir ableiten, keine zusätzliche Bezeichnung einführen müssen. Inhaltlich sind die Aussagen
von (14.24) und (14.25) aber identisch.
Wenn das Funktional S[f ] an der Stelle f stationär sein soll, dann müssen dort alle Richtungsableitungen
verschwinden, oder äquivalent dazu, es muss die Variation δS[f ] für alle Variationen δf verschwinden. Um
das in eine Bedingung an f zu übersetzen, müssen wir auch hier wieder die Ableitungen loswerden, die
noch auf die Variation δf wirken.
Dazu führen wir mehrere partielle Integrationen durch. Und zwar integrieren wir den Term, der δf (k) (x)
enthält, k mal partiell. Das produziert ein Vorzeichen (−1)k und einen Satz von Randtermen, die uns im
Moment nicht interessieren. Das Ergebnis ist
δS[f ] =
h Rand- i
terme
+
2
Z x
n
X
x1
(−1)k
k=0
dk ∂L
0
(n)
f
(x),
f
(x),
.
.
.
,
f
(x),
x
δf (x) dx.
dxk ∂f (k)
(14.26)
Wenn das für alle δf gleich Null sein soll, dann muss der Ausdruck in der Klammer für alle x verschwinden, denn δf (x) kann für alle x innerhalb des Intervalls beliebig gewählt werden. Als notwendige Bedingung dafür, dass das Funktional S[f ] an der Stelle f stationär ist, bekommen wir die Gleichung
Eulersche
Gleichung
n
X
k=0
(−1)k
dk ∂L
f (x), f 0 (x), . . . , f (n) (x), x = 0.
k
(k)
dx ∂f
(14.27)
Dies ist eine Differenzialgleichung für die Funktion f (x). Sie wird als Eulersche Gleichung für das gegebene Variationsproblem bezeichnet. Zu beachten ist dabei, dass die Ableitungen d/dx, die auf die einzelnen Ausdrücke wirken, jeweils auf alle Argumente der Funktion L wirken, nämlich explizit auf das
letzte Argument x, und implizit auf alle anderen Argumente, weil diese wiederum über f , f 0 , f 00 etc. von
x abhängen.
Die entsprechende Überlegung für die Richtungsableitung (14.24) führt natürlich zum selben Ergebnis.
Damit die Richtungsableitungen verschwinden, muss die Differenzialgleichung (14.27) erfüllt sein.
Damit ein Funktional S[f ], das als Integral einer Funktion von f (x), f 0 (x), . . ., f (n) (x) und x
gegeben ist, stationär wird, muss die Funktion f die zugehörige Eulersche Gleichung erfüllen.
Das ist natürlich nur eine notwendige Bedingung, denn die Randterme in (14.26) müssen auch verschwinden, damit das Funktional wirklich stationär ist. In dem Beispiel aus dem letzten Abschnitt hatten wir
allerdings gesehen, dass diese Randterme schon wegen der an die Funktion f gestellten Randbedingungen
gleich Null waren.
Tatsächlich hängen die Randterme von den gestellten Randbedingungen an die Funktion f ab, also davon, wie der Funktionenraum, auf dem das Funktional definiert ist, an den Rändern des Intervalls aussieht.
In den meisten praktischen Fällen verschwinden die Randterme automatisch. Wir werden dies im folgenden stets annehmen, wenn wir Variationsprobleme allgemein diskutieren. Natürlich müssen wir dann im
Einzelfall stets zeigen, dass dem auch so ist, wenn wir ein spezielles Problem lösen wollen.
Mit Hilfe der Eulerschen Gleichung lässt sich das Ergebnis des letzten Abschnitts leicht reproduzieren.
Um das Funktional (14.12) für die Länge des Grafen der Funktion f zu bekommen, müssen wir n = 1 und
p
(14.28)
L f, f 0 , x = 1 + f 02
setzen. Daraus folgt
∂L
f, f 0 , x = 0,
∂f
∂L
f0
0
p
,
f,
f
,
x
=
∂f 0
1 − f 02
121
(14.29)
und die Eulersche Gleichung lautet
d ∂L
d
f 0 (x)
∂L
0
p
f
(x),
f
(x),
x
=
−
= 0.
f (x), f 0 (x), x −
∂f
dx ∂f 0
dx 1 − f 0 (x)2
(14.30)
Das ist wieder die Gleichung (14.19), die genau dann erfüllt ist, wenn f (x) eine lineare Funktion ist.
Aufgabe 14.9 Welche höchste Ordnung kann die Differenzialgleichung (14.27) für die gesuchte Funktion
f (x) haben?
Aufgabe 14.10 Man berechne die Randterme in (14.26) für n = 2.
Aufgabe 14.11 Wenn die Randterme in (14.26) nicht verschwinden, ergeben sich zus ätzliche Bedingungen
an f . Die Eulersche Gleichung (14.27) als notwendige Bedingung f ür das Vorliegen eines Extremums wird
durch die Randterme jedoch nicht modifiziert. Warum nicht?
Das Brachistochronenproblem
Ein nicht ganz triviales Variationsproblem ergibt sich aus der folgenden Aufgabe, die wir als anschauliches Beispiel diskutieren wollen. Es soll eine Rutschbahn gebaut werden, auf der Gegenstände möglichst
schnell von einem vorgegeben Ort zu einem anderen transportiert werden sollen, indem man sie einfach
in die Rutschbahn fallen lässt. Sie bewegen sich dort nur unter dem Einfluss der Schwerkraft, und die
Reibung soll vernachlässigt werden. Welches ist die günstigste Form der Rutschbahn?
Die Bezeichung Brachistochronenproblem für dieses Extremalproblem leitet sich aus den griechischen
Wörtern brachis für ‘kurz’ und chonos für ‘Zeit’ ab. Gesucht ist diejenige Kurve, der die kürzesten Laufzeit entspricht. Solche physikalisch motivierten Extremalprobleme wurden bereits im 17. Jahrhundert von
Newton und den Brüdern Bernoulli gestellt und diskutiert. Erst durch das von Euler im 18. Jahrhundert
entwickelte Verfahren, das wir im letzten Abschnitt hergeleitet haben, gelingt jedoch eine elegante Lösung.
Das Problem ist in Abbildung 14.2(a) dargestellt. Es handelt sich um ein zweidimensionales Problem, da
es sicher am günstigsten ist, wenn die Rutschbahn, von oben gesehen, die beiden Punkte auf einer geraden
Strecke verbindet. Wir verwenden die Koordinaten (x, z), wobei die z-Achse wie üblich nach oben zeigen
soll. Der Anfangspunkt der Rutschbahn befinde sich am Koordinatenursprung bei (x, z) = (0, 0), der
Endpunkt bei (x, z) = (d, −h), wobei sowohl die horizontale Strecke d als auch die Fallhöhe h positiv
sein sollen.
Die Rutschbahn kann dann durch die Gleichung
z = −f (x),
mit f (0) = 0,
f (d) = h,
(14.31)
dargestellt werden. Bewegt sich ein Gegenstand auf der Rutschbahn, so können wir seine Bahn durch die
Funktionen x(t) und z(t) = −f (x(t)) beschreiben. Um die Laufzeit zu berechnen, benutzen wir die in
Teil I entwickelte Methode, die auf dem Energieerhaltungssatz beruht. Dann müssen wir die Bewegungsgleichungen nämlich gar nicht explizit lösen.
Die Energie des rutschenden Körpers setzt sich aus der kinetischen und der potenziellen Energie zusammen. Da der Gegenstand am Anfang einfach fallen gelassen werden soll, ergibt sich ihr Wert aus dem
Gravitationspotenzial an dieser Stelle. Setzen wir das Gravitationspotenzial bei z = 0 gleich Null, so gilt
dx m
m
2
− m g f (x) = 0.
(14.32)
E = (ẋ2 + ż 2 ) + m g z = (1 + f 0 (x)2 )
2
2
dt
Durch Auflösen nach der Geschwindigkeit ergibt sich eine Differenzialgleichung erster Ordnung,
s
dx 2 g f (x)
1 + f 0 (x)2
2
⇒ dt =
dx.
(14.33)
=
dt
2 g f (x)
1 + f 0 (x)2
122
(c)
(d)
z
d
u
v
x
z
x
ϕ
ϕ
ϕ
h
(b)
(a)
Abbildung 14.2: Beim Brachistochronenproblem (a) geht es darum, eine Rutschbahn zu konstruieren, auf
der ein Gegenstand allein unter dem Einfluss der Schwerkraft möglichst schnell von einem vorgegebenen
Punkt zu einem anderen gelangt. Die Lösungskurve ist eine Zykloide (b), die einsteht, wenn ein Rad auf
einer Geraden abrollt.
Daraus ergibt sich durch Integration die Laufzeit für den Gegenstand,
T [f ] =
Z
0
T
dt =
2
Z xs
1 + f 0 (x)2
dx.
2 g f (x)
(14.34)
x1
Die Aufgabe besteht nun darin, das Funktional T [f ] zu minimieren. Es handelt sich um ein Variationsproblem der allgemeinen Form, wie wir es gerade diskutiert haben. Wir müssen die Eulersche Gleichung
s
d ∂L
1 + f 02
∂L
0
−
=
0
mit
L(f,
f
)
=
(14.35)
∂f
dx ∂f 0
2gf
lösen. Explizit ausgewertet ergibt sich daraus eine Differenzialgleichung zweiter Ordnung für die gesuchte
Funktion f (x).
Mit einem kleinen Trick, der sich später als Spezialfall eines ganz wichtigen Satzes herausstellen wird,
formen wir sie in eine Differenzialgleichung erster Ordnung mit einem freien Parameter um. Da die Funktion L nicht explizit, sondern nur über die Funktion f und ihre Ableitung f 0 von der Integrationsvariable
x abhängt, gilt folgende Identität. Es ist
∂L
d 0 ∂L
0 d ∂L
00 ∂L
0 ∂L
+ f 00 0
f
0 −L = f
0 +f
0 −f
dx
∂f
dx ∂f
∂f
∂f
∂f
d ∂L ∂L = f0
−
.
dx ∂f 0
∂f
(14.36)
Unter der Voraussetzung f 0 6= 0 ist somit die Eulersche Gleichung äquivalent zu der Differenzialgleichung
erster Ordnung
∂L
(14.37)
f 0 0 − L = konst.
∂f
Die linke Seite dieser Gleichung lässt sich für die spezielle Funktion L (14.35) leicht auswerten. Es ergibt
sich
∂L
1
(14.38)
f0 0 − L = q
.
∂f
2 g f 1 + f 02
123
Die zu lösende Differenzialgleichung lautet also
f (x) (1 + f 0 (x)2 ) = 2 a
⇔
f 0 (x)2 =
2 a − f (x)
,
f (x)
(14.39)
wobei a eine Konstante ist. Den Faktor 2 haben wir an dieser Stelle nur eingeführt, damit die Lösung später
eine einfache Form annimmt.
Aufgabe 14.12 Gibt es eine anschauliche physikalische Erklärung dafür, dass letztlich weder die Masse
m des Gegenstandes, noch die Erdbeschleunigung g für die gesuchte Form der Rutschbahn eine Rolle
spielt?
Die Differenzialgleichung (14.39) lässt sich durch folgende Substitution lösen. Wir setzen
f 0 (x) = a sin(ϕ(x)) ϕ0 (x).
(14.40)
1 + cos(ϕ(x))
a + a cos(ϕ(x))
=
.
a − a cos(ϕ(x))
1 − cos(ϕ(x))
(14.41)
f (x) = a − a cos(ϕ(x))
⇒
Setzen wir das in (14.39) ein, so ergibt sich
a2 sin2 (ϕ(x)) ϕ0 (x)2 =
Erweitert man den Bruch mit 1 − cos(ϕ(x)), so findet man
1 + cos(ϕ(x))
sin2 (ϕ(x))
,
=
1 − cos(ϕ(x))
( 1 − cos(ϕ(x)) )2
(14.42)
was schließlich auf die Differenzialgleichung
ϕ0 (x) =
1
a − a cos(ϕ(x))
(14.43)
führt. Sie lässt sich nicht explizit lösen. Wenn wir jedoch die Umkehrfunktion x(ϕ) betrachten, so gilt für
diese
x0 (ϕ) = a (1 − cos ϕ) ⇒ x(ϕ) = a (ϕ − sin ϕ) + b,
(14.44)
wobei b eine zweite Integrationskonstante ist. Da die Koordinate z = −f (x) bereits als Funktion von ϕ(x)
dargestellt ist, bekommen wir folgende Parameterdarstellung der gesuchten Kurve,
x(ϕ) = a (ϕ − sin ϕ) + b,
z(ϕ) = a (cos ϕ − 1).
(14.45)
Die Konstanten a und b müssen wir so bestimmen, dass die Kurve durch die Punkte (0, 0) und (d, −h)
läuft. Die erste Bedingung ist für b = 0 erfüllt. Der Anfangspunkt der Rutschbahn entspricht dann dem
Kurvenparameter ϕ = 0. Damit die Kurve durch den vorgegebenen Endpunkt verläuft, muss es ein ϕ
geben mit
a (ϕ − sin ϕ) = d,
a (1 − cos ϕ) = h.
(14.46)
Aus diesem Gleichungssystem lässt sich die Konstante a und der Wert von ϕ am Endpunkt der Bahn
numerisch bestimmen.
Damit haben wir die gesuchte Bahn gefunden, auf der Körper am schnellsten sein Ziel erreicht. Die
optimale Bahn ist eine Zykloide. Sie ergibt sich, wenn man ein Rad, wie in Abbildung 14.2(b) gezeigt, auf
der x-Achse abrollt und dabei einen vorgegebenen Punkt auf dem Umfang verfolgt. Der Mittelpunkt des
Rades befindet sich am Punkt (a ϕ, −a) unterhalb der x-Achse un bewegt sich gleichmäßig nach rechts.
Die Speiche, also der Vektor, der vom Mittelpunkt zu dem vorgegeben Punkt auf dem Umfang zeigt, hat
die Komponenten (−a sin ϕ, a cos ϕ) und dreht sich gleichmäßig gegen den Uhrzeigersinn. Der Radius a
des Rades ist so zu bestimmen, dass der Punkt auf dem Umfang, der am Anfangspunkt der Kurve gerade
die x-Achse berührt, später durch den vorgegebenen Endpunkt der Kurve hindurch läuft.
124
Aufgabe 14.13 Man zeige, dass das Gleichungssystem (14.46) f ür d > 0 und h > 0 genau eine Lösung
mit a > 0 und 0 < ϕ < 2π besitzt. Das Brachistochronenproblem ist also eindeutig l ösbar.
Aufgabe 14.14 Wie man in Abbildung 14.2(a) erkennt, erreicht die optimale Rutschbahn ihr Ziel von
unten, das heißt die Bahn verläuft teilweise unterhalb des Zielpunktes. Offenbar lässt sich dadurch Zeit
gewinnen, denn der Körper ist auf diesem Teilstück noch schneller als bei seiner Ankunft. Für welche
Werte der horizontalen Wegstrecke d und Fallhöhe h hat die optimale Bahn diese Eigenschaft?
Aufgabe 14.15 Man zeige, dass die Bahn so durchlaufen wird, dass der Kurvenparameter ϕ eine lineare
Funktion der Zeit ist. Wie lang ist die benötigte Zeit T auf der optimalen Bahn? Welche Laufzeit ergibt
sich speziell für zwei Punkte, die auf gleicher Höhe liegen?
Aufgabe 14.16 In Abbildung 14.2(a) sind zwei alternative Bahnen eingezeichnet. Die erste verl äuft entlang einer Geraden. Auf der zweiten fällt der Gegenstand zuerst senkrecht nach unten, wird dann scharf
umgelenkt und bewegt sich mit konstanter Geschwindigkeit zum Ziel. Man zeige, dass die Laufzeit in beiden Fällen größer ist als die auf der optimalen Bahn.
Aufgabe 14.17 Wie sollte die Rutschbahn angelegt werden, wenn der K örper möglichst lange unterwegs
sein soll? Gibt es dafür auch eine optimale Bahn?
Aufgabe 14.18 Ein anderes Variationsproblem, das sich auf ähnliche Weise lösen lässt, ist das in Abbildung 14.3 dargestellte Minimalflächenproblem. Zwei parallele Ringe mit Radius r werden in einem
Abstand d aufgestellt. Zwischen ihnen ist eine Rotationsfläche aufgespannt, die durch die Gleichung
y 2 + z 2 = f (x)2 beschrieben werden kann, mit −d/2 ≤ x ≤ d/2 und f (−d/2) = f (d/2) = r. Gesucht ist die kleinste solche Fläche. Man beweise die in der Abbildung gemachten Angaben und bestimme
den kritischen Wert für das Verhältnis d/r numerisch. Man betrachte speziell die Situation (b). Ist die
dargestellte äußere Fläche tatsächlich die kleinste mögliche Fläche, die von den Ringen begrenzt wird?
Funktionale mit mehreren Argumenten
Das allgemeine, durch (14.22) definierte Variationsproblem lässt sich leicht auf Funktionale verallgemeinern, die von mehreren Argumenten, also von mehreren Funktionen abhängen. Als Beispiel betrachten
wir ein Funktional S[f, g], das von zwei Funktionen f (x) und g(x) abhängt. Beide sollen auf dem Intervall x1 ≤ x ≤ x2 definiert sein, und das Funktional soll wieder durch ein Integral gegeben sein, dessen
Integrand jetzt aber von den beiden Funktion und ihren Ableitungen abhängt.
Der Einfachheit halber beschränken wir uns an dieser Stelle auf die Funktionen und ihre ersten Ableitungen. Es sei also
Z x2
S[f, g] = L(f (x), f 0 (x), g(x), g 0 (x), x) dx.
(14.47)
x1
Die übliche Rechnung ergibt dann den folgenden Ausdruck für die Variation des Funktionals,
δS[f, g] =
2
Z x
x1
∂L
∂L 0
∂L
∂L 0 δf (x) + 0 δf (x) +
δg(x) + 0 δg (x) dx.
∂f
∂f
∂g
∂g
(14.48)
Auch hier führen wir wieder partielle Integrationen durch, um die Ableitungen der Variationen δf 0 (x)
und δg 0 (x) zu eliminieren. Außerdem nehmen wir an, dass an beide Funktionen feste Randbedingungen
125
replacements
(d)
d = 1.0 r
d = 1.3 r
(a)
(b)
d = 1.4 r
(c)
Abbildung 14.3: Zwischen zwei gleich großen, parallel zueinander ausgerichteten Ringen bilden sich zwei
Extremalflächen aus (a). Nur die äußere ist eine Minimalfläche. Zieht man die Ringe weiter auseinander,
so nähern sich die beiden Extremalflächen einander an (b). Übersteigt das Verhältnis aus Abstand und
Radius einen kritischen Wert, so gibt es nur noch die entartete Minimalfläche, die aus zwei Kreisscheiben
besteht.
f (x1,2 ) = f1,2 und g(x1,2 ) = g1,2 gestellt sind. Dann verschwinden die beim partiellen Integrieren auftretenden Randterme, denn es muss δf (x1,2 ) = 0 und δg(x1,2 ) = 0 sein. Wir bekommen schließlich
δS[f, g] =
Z x2h
x1
∂L
i
d ∂L d ∂L ∂L
−
−
δf
(x)
+
δg(x)
dx
∂f
dx ∂f 0
∂g
dx ∂g 0
(14.49)
Damit das Funktional stationär ist, muss das Integral für alle δf und alle δg verschwinden. Offenbar ist
das genau dann der Fall, wenn für f und g die Differenzialgleichungen
∂L
d ∂L
−
= 0,
∂f
dx ∂f 0
∂L
d ∂L
−
=0
∂g
dx ∂g 0
(14.50)
erfüllt sind. Es muss also für jede Funktion jeweils eine Eulersche Gleichung erfüllt sein. Es ergibt sich ein
gekoppeltes System von Differenzialgleichungen, da die Funktion L und ihre Ableitungen im allgemeinen
von beiden Funktionen abhängen.
Es ist mehr oder weniger offensichtlich, wie sich diese Aussage auf Funktionale von endlich vielen
Funktionen verallgemeinern lässt, sowie auf Funktionale, die von beliebig vielen Ableitungen abhängen.
Hängt der Integrand L von endlich vielen Funktionen fα (x) und ihren Ableitungen fα0 (x) bis fα(n) (x) ab,
so lauten die Eulerschen Gleichungen
n
X
k=1
(−1)
dk ∂L
= 0,
dxk ∂fα(k)
(14.51)
und es gibt eine solche Gleichung für jeden Index α, also genau so viele wie Funktionen f α (x).
Wir wollen auch dafür ein einfaches Beispiel diskutieren, das zudem eine andere typische Eigenschaft
von Variationsproblemen deutlich macht. Wir suchen wieder die kürzeste Verbindung zwischen zwei
Punkten, diesmal aber in einem metrischen affinen Raum beliebiger Dimension. Die Kurve werde durch
126
eine Funktion λ(s) beschrieben, wobei s der Kurvenparameter ist. Als Randwerte geben wir λ(s 1 ) = p1
und λ(s2 ) = p2 , wobei p1 und p2 zwei beliebige Punkte sind und s2 > s1 .
Wenn wir die Kurve durch kartesische Koordinaten λi (s) darstellen, können wir die Länge wie folgt
berechnen,
2
2
Z sq
Z sq
0
0
L[λ] =
λ (s) · λ (s) ds =
λ0i (s) λ0i (s) ds.
(14.52)
s1
s1
Das Funktional hängt von insgesamt N Funktionen ab, wenn N die Dimension des Raumes ist. Die unter
dem Integral auftretende Funktion ist
q
L(λ0 (s)) = λ0i (s) λ0i (s).
(14.53)
Sie hängt nur von den ersten Ableitungen der gesuchten Funktionen λ i (s) ab. Die Eulerschen Gleichungen
haben daher nur einen Term, und zwar
λ0i (s)
d d ∂L
q
= 0.
=
ds ∂λ0i
ds
λ0 (s) λ0 (s)
j
(14.54)
j
Die Gleichungen für die einzelnen Koordinatenfunktionen können wir wieder zu einer Vektorgleichung
zusammenfassen. Die Bedingung lautet
λ0 (s)
d p
=0
ds
λ0 (s) · λ0 (s)
⇒
λ0 (s)
p
= konst.
λ0 (s) · λ0 (s)
(14.55)
Die Eulerschen Gleichungen verlangen, dass der normierte Tangentenvektor der Kurve entlang der Kurve
konstant ist. Der normierte Tangentenvektor an der Stelle s ist der Einheitsvektor, der anzeigt, in welche
Richtung die Kurve an der Stelle s verläuft. Dieser Vektor ist genau dann konstant, wenn die Kurve eine
Gerade ist.
Das bedeutet aber nicht, dass die Funktion λ(s) durch die Eulerschen Gleichungen zusammen mit
den Randbedingungen eindeutig festgelegt ist. In den bisherigen Beispielen war das immer der Fall. Hier
finden wir jedoch eine unendliche Menge von Funktionen, für die das Funktional stationär ist, nämlich
alle möglichen Parametrisierungen der Geraden von p1 nach p2 . Jede Funktion der Form
λ(s) = p1 + u(s) (p2 − p1 )
(14.56)
erfüllt die Differenzialgleichung (14.55) und die gestellten Randbedingungen, sofern u(s) eine monoton
steigende reelle Funktion mit u(s1 ) = 0 und u(s2 ) = 1 ist.
Wir sehen also, dass das Minimum eines Funktionals nicht immer an einem einzelnen Punkt im Funktionenraum, also für eine bestimmte Funktion angenommen wird. Es ist durchaus möglich, dass es eine
Teilmenge von Funktionen gibt, für die das Funktional den gleichen minimalen Wert annimmt. Hier haben
natürlich alle parametrisierten Kurve (14.56) dieselbe Länge, nämlich |p 2 − p1 |, wie man durch Einsetzen
leicht nachrechnen kann.
Aufgabe 14.19 Man überzeuge sich davon, dass bei der partiellen Integration, die zur Herleitung der Eulerschen Gleichungen notwendig ist, auch in diesem Fall keine Randterme auftreten. Man zeige allgemein,
dass die Randterme verschwinden, wenn der Integrand, also die Funktion L, nur von den Funktionen
fα (x) und ihren ersten Ableitungen fα0 (x) abhängen, und wenn die Funktionswerte fα (x1 ) und fα (x2 ) an
den Rändern des Intervalls fixiert sind.
127
Lagrange-Funktion und Wirkung
Auch wenn wir es bisher nicht explizit erwähnt haben, sollte an dieser Stelle bereits klar sein, wie das allgemeine Variationsproblem mit den Bewegungsgleichungen der klassischen Mechanik zusammenhängt.
Die Eulerschen Gleichungen sind genau die Lagrangeschen Bewegungsgleichungen für ein mechanisches
System, wenn die für die Integrationsvariable x die Zeit t einsetzen, die gesuchten Funktionen f α (t) durch
die Koordinatenfunktionen q µ (t) auf dem Konfigurationsraum ersetzen, und für den Integranden des Funktionals die Lagrange-Funktion L des mechanischen Systems einsetzen.
Natürlich besteht diese Beziehung nur dann, wenn dem mechanischen System eine Lagrange-Funktion
zugeordnet werden kann. Wir nehmen daher im folgenden an, dass es sich um ein solches System handelt.
Es dürfen also nur Kräfte auftreten, die entweder aus einem Potenzial abgeleitet werden können oder,
etwas allgemeiner, von der Art der Lorentz-Kraft sind. Von dieser hatten wir am Ende von Kapitel 11
gezeigt, dass auch sie aus eine Lagrange-Funktion abgeleitet werden kann, wenn die zugehörigen Felder
die Maxwell-Gleichungen erfüllen.
Auf die spezielle Form der Lagrange-Funktion kommt es hier nicht an. Wichtig ist nur, dass es sich
um eine Funktion der Koordinaten q µ auf dem Konfigurationsraum und ihrer Zeitableitungen q̇ µ handelt.
Außerdem kann sie noch explizit von der Zeit abhängen. Die Bewegungsgleichungen lassen sich dann in
der Form
∂L
d ∂L
=0
(14.57)
µ −
dt ∂ q̇
∂q µ
aufschreiben. Wir wollen diese Bewegungsgleichungen nun als die Eulerschen Gleichungen interpretieren,
die sich aus einem speziellen Variationsproblem ergeben. Sie werden deshalb auch als Euler-LagrangeGleichungen bezeichnet, wobei der Name Euler, so wie wir ihn bisher gebraucht haben, die Tatsache zum
Ausdruck bringt, dass sich die Gleichungen aus einem Variationsproblem ableiten lassen, während der
Name Lagrange für die physikalische Bedeutung der Gleichungen steht.
Das zugehörige Variationsproblem können wir wie folgt formulieren. Wir betrachten zunächst eine beliebige Bahn q(t) im Konfigurationsraum Q des mechanischen Systems, dargestellt durch die Koordinatenfunktionen q µ (t), und zwar für ein endliches Zeitintervall t1 ≤ t ≤ t2 . Außerdem stellen wir die
folgenden Randbedingungen. Zur Zeit t1 soll das System die Konfiguration q(t1 ) = q1 annehmen, und zur
Zeit t2 die Konfiguration q(t2 ) = q2 .
Über den Verlauf der Bahn machen wir sonst keine Aussage, außer dass sie differenzierbar sein soll.
Insbesondere nehmen wir nicht an, dass es sich um eine Lösung der Bewegungsgleichung handelt. Es ist
einfach irgendeine denkbare Bahn, die zur Zeit t1 bei q1 startet und zur Zeit t2 bei q2 ankommt. Jeder
solchen Bahn ordnen wir eine reelle Zahl zu, nämlich
Wirkung
S[q] =
Z
t1
t2
L q(t), q̇(t), t dt.
(14.58)
Wir nennen diese Größe die Wirkung der gegebenen Bahn. Die Wirkung S ist ein Funktional der Bahn
q(t). Sie hat die physikalische Dimension Energie mal Zeit.
Die Wirkung einer Bahn ist das Zeitintegral der Lagrange-Funktion.
Wir können nun die Frage stellen, für welche Bahnen diese Wirkung extremal wird. Die Antwort können
wir sofort geben. Es sind diejenigen Bahnen, die die Lagrange-Gleichungen (14.57) erfüllen. Denn für die
Variation der Wirkung gilt
Z t2
h ∂L
it=t2 Z t2 ∂L
d ∂L µ
∂L µ ∂L µ µ
δq dt.
δq
+
δ
q̇
dt
=
δq
+
−
δS[q] =
∂q µ
∂ q̇ µ
∂ q̇ µ
t=t1
∂q µ dt ∂ q̇ µ
t1
t1
128
(14.59)
Die Randterme verschwinden, da wir nur solche Bahnen q(t) betrachten, die zu den Zeiten t 1 und t2 die
Werte q1 bzw. q2 annehmen. Folglich betrachten wir auch nur solche Variationen δq(t), die bei t = t 1
und t = t2 verschwinden. Ansonsten sind die Variationen δq µ (t) der Koordinatenfunktionen aber beliebig.
Deshalb muss der Ausdruck in der Klammer zu jedem Zeitpunkt t zwischen t 1 und t2 verschwinden, das
heißt die Bewegungsgleichungen (14.57) müssen erfüllt sein.
Daraus ziehen wir den folgenden Schluss. Bewegt sich ein System von einer Konfigurationen q 1 zur
Zeit t1 zu einer Konfiguration q2 zur Zeit t2 , so nimmt es dabei genau diejenige Bahn, für die die Wirkung
extremal wird. Diese Formulierung der Bewegungsgleichungen wird Prinzip der station ären Wirkung oder
kurz Wirkungsprinzip genannt.
Die physikalischen Bahnen sind die Bahnen mit stationärer Wirkung.
Unter den physikalischen Bahnen eines mechanischen Systems verstehen wir dabei diejenigen Bahnen,
die tatsächlich von dem System realisiert werden, im Gegensatz zu allen denkbaren Bahnen im Konfigurationsraum.
Damit haben wir eine sehr bedeutende Feststellung gemacht. Ursprünglich hatten wir die LagrangeGleichungen aus den Newtonschen Bewegungsgleichungen abgeleitet, indem wir diese einfach in einer
neuen Form dargestellt haben. Das hatte ein paar technische Vorteile, etwa bei der Handhabung von
krummlinigen Koordinatensystemen oder der Beschreibung von Systemen mit Zwangsbedingungen. Es
handelte sich aber nur um eine neue Schreibweise derselben Differenzialgleichungen.
Nun haben wir ein neues Prinzip definiert, das wir als eine Art übergeordnetes Naturprinzip betrachten
können. Offenbar verhalten sich bestimmte mechanische Systeme so, dass die Bahnen, die sie realisieren,
nicht nur einfach durch einen Satz von mehr oder weniger willkürlichen Differenzialgleichungen bestimmt
werden. Sie folgen vielmehr einen “höheren” Prinzip, nach dem sie eine bestimmte Funktion, oder genauer
ein bestimmtes Funktional extremal machen.
Ein Begründung dafür gibt es zunächst nicht. Es ist nur eine Beobachtung, die man beim Studium von
mechanischen System macht. Es zeigt sich aber, dass sich ähnliche Variationsprinzipien auch in anderen
Bereichen der Physik formulieren lassen, und zwar insbesondere für alle bekannten fundamentalen Theorien von Teilchen und ihren Wechselwirkungen. Tatsächlich hatten wir ja bereits gesehen, dass sich genau
diejenigen Kräfte auf ein einzelnes Teilchen aus einer Lagrange-Funktion ableiten lassen, die die Form
der elektromagnetischen Lorentz-Kraft haben. Auch die Gravitationskraft kann aus einem Potenzial und
damit aus einer Lagrange-Funktion abgeleitet werden.
Typische mechanische Systeme, bei denen dies nicht der Fall ist, sind solche, in denen Reibungskräfte
auftreten. Reibungskräfte sind aber niemals “fundamental”. Es handelt sich vielmehr nur um eine effektive Beschreibung sehr komplizierter, mikroskopischer Wechselwirkungen, deren Details für die Beschreibung eines makroskopischen mechanischen Systems nicht von Bedeutung sind. Würde man diese Details
vollständig in die Beschreibung mit aufnehmen, könnte man die Bewegungsgleichungen wieder aus einer
Lagrange-Funktion ableiten.
In der Beschreibung von grundlegenden Naturgesetzen kommt dem Wirkungsprinzip daher eine sehr
wichtige Bedeutung zu. Auch die Formulierungen von anderen grundlegenden Theorien wie der Quantenphysik bauen auf diesem Prinzip auf. Tatsächlich stellt das Wirkungsfunktional in einer bestimmten Art
und Weise das Bindeglied zwischen der klassischen Physik und der Quantenphysik her. Auf einige dieser
Aspekte werden wir in den nächsten Kapiteln eingehen.
Aufgabe 14.20 Um eine anschauliche Vorstellung davon zu bekommen, was das Wirkungsprinzip eigentlich genau besagt, betrachten wir folgende Situation. Ein Teilchen bewege sich im dreidimensionalen Raum
mit kartesischen Koordinaten (x, y, z) in einem Gravitationspotenzial V = m g z. Es befinde sich zur Zeit
t1 am Koordinatenursprung und zur Zeit t2 wieder dort. Wir betrachten nur eine ganz kleine Teilmenge der
möglichen Bahnen, die das Teilchen in der Zwischenzeit zurück gelegt haben könnte, nämlich diejenigen
129
Bahnen, die durch eine quadratische Funktion von t wie folgt dargestellt werden k önnen,
x(t) = a (t − t1 ) (t2 − t),
y(t) = b (t − t1 ) (t2 − t),
z(t) = c (t − t1 ) (t2 − t).
(14.60)
Statt des unendlich-dimensionalen Raumes aller möglicher Bahnen betrachten wir also nur einen dreidimensionalen Unterraum, der durch drei Zahlen a, b und c parametrisiert wird. Alle diese Bahnen haben
die verlangte Eigenschaft, dass sich das Teilchen zu den Zeiten t 1 und t2 jeweils am Ursprung befindet.
Es ist natürlich nicht klar, ob die tatsächlich realisierte Bahn in dieser “zufälligen” Auswahl von Bahnen dabei ist. Trotzdem können wir für jede solche Bahn die Wirkung berechnen und diese als Funktion
S(a, b, c) darstellen. Wenn die tatsächlich realisierte Bahn dabei ist, muss es diejenige sein, für die diese
Funktion von drei Variablen extremal wird. Gibt es ein solches Extremum? Wenn ja, ist es ein Minimum,
ein Maximum oder ein Sattelpunkt, und entspricht es der tatsächlich realisierten Bahn?
Aufgabe 14.21 Das folgende Beispiel soll klar machen, wie das Wirkungsprinzip benutzt werden kann,
um physikalische Bahnen zu approximieren. Wieder betrachten wir ein Teilchen in einem homogenen Gravitationsfeld. Diesmal soll sich das Teilchen zu Zeit t1 an einem Ort r1 befinden, und Zeit t2 am Ort r2 . Wir
erlauben aber nur solche Bahnen, auf denen sich das Teilchen zuerst mit konstanter Geschwindigkeit von
r1 nach r bewegt, wo es zur Zeit t mit t1 < t < t2 ankommt, um dann von dort aus wieder mit konstanter
Geschwindigkeit zum Ort r2 zu gelangen. Für jede solche Bahn ergibt sich eine Wirkung, die als Funktion
S(r, t) des “Umkehrpunktes” r und der “Umkehrzeit” t dargestellt werden kann. Man zeige, dass das
Extremum dieser Funktion zwar nicht die tatsächlich realisierte Bahn liefert, aber zumindest eine Bahn,
die im Rahmen dieser sehr primitiven Näherung der physikalischen Bahn am nächsten kommt.
Aufgabe 14.22 Für einen eindimensionalen harmonischen Oszillator gilt
m 2 κ 2
L(q, q̇) =
q̇ − q .
2
2
(14.61)
Der Oszillator befinde sich zum Zeitpunkt t = 0 an der Stelle q(0) = 0 und zum Zeitpunkt t = T bei
q(T ) = Q. Für die Bahn machen wir den Potenzreihenansatz
q(t) = a (t/T ) + b (t/T )3 + c (t/T )5 ,
mit a + b + c = Q.
(14.62)
Die Zahlen a, b, c sind so zu bestimmen, dass die Wirkung der Bahn extremal wird. Auf diese Weise erh ält
man eine Näherung für die tatsächlich realisierte Bahn. Man stellt fest, dass es einen bestimmten Wert f ür
T gibt, bei dem kein solches Extremum mehr existiert. Woran liegt das? Man bestimme diesen kritischen
p
Wert für T numerisch und zeige, dass es sich um eine gute Näherung für die halbe Periode π m/κ
handelt.
Aufgabe 14.23 In Aufgabe 11.27 hatten wir festgestellt, dass sich die Bewegungsgleichungen nicht
ändern, wenn wir zu einer Lagrange-Funktion L(q, q̇, t) die totale Zeitableitung irgendeiner Funktion
Λ(q, t) addieren, also die alternative Lagrange-Funktion
d
Λ(q, t)
(14.63)
dt
betrachten. Warum das so ist, können wir nun mit Hilfe des Wirkungsprinzips sehr leicht verstehen. Welcher Zusammenhang besteht nämlich zwischen den Wirkungsfunktionalen
L0 (q, q̇, t) = L(q, q̇, t) +
S[q] =
Z
t1
t2
L q(t), q̇(t), t dt
0
und S [q] =
Z
t1
t2
L0 q(t), q̇(t), t dt,
(14.64)
wenn q(t) eine Bahn mit festgelegten Anfangs- und Endpunkten q(t 1 ) = q1 und q(t2 ) = q2 ist? Warum
führen beide auf dasselbe Variationsproblem?
130
replacements
h(x)
h(x)
(c)
(d)
x2
x2
c(x) = 0
x1
(a)
x1
(b)
Abbildung 14.4: ...
Variation mit Nebenbedingungen
Nun wollen wir noch zeigen, dass das Wirkungsprinzip auch für Systeme mit holonomen Zwangsbedingungen gilt. Zur Vorbereitung betrachten wir ein Variationsproblem, bei dem eine bestimmte Funktion
extremal werden soll, wobei die Argumente dieser Funktion jedoch gewissen Einschränkung unterliegen.
Ein solches Problem bezeichnet man als Variationsproblem mit Nebenbedingungen.
Gesucht sind zunächst die Extrema einer Funktion h(x) auf einem affinen Raum E. In der Abbildung 14.4(a) ist der Graf einer Funktion auf einem zweidimensionalen affinen Raum E als Fläche über
einer Ebene aufgetragen. Als Koordinaten haben wir dort ein affines Koordinatensystem (x 1 , x2 ) verwendet. Die dargestellte Funktion besitzt genau ein Maximum an der Stelle, an der der Gradient ∇h(x)
verschwindet.
Nun verändern wir das gestellte Problem ein wenig. Wir lassen die Funktion h(x) unverändert,
schränken die Suche nach den Extrema aber auf eine Teilmenge von E ein, die durch eine Gleichung
c(x) = 0 beschrieben wird. Eine solche Gleichung bezeichnen wir als Nebenbedingung. In Abbildung 14.4(a) wird durch sie eine Kreislinie beschrieben. Gesucht sind jetzt diejenigen Punkte, an denen
die Funktion h(x) innerhalb der Teilmenge extremal wird. Wie man in der Abbildung erkennt, ergibt sich
in diesem Fall ein Minimum und ein Maximum.
Es gibt zwei Möglichkeiten, dieses Problem zu lösen. Wenn es uns gelingt, die Gleichung c(x) = 0 zu
lösen, indem wir auf der Lösungsmenge ein reduziertes Koordinatensystem {y α } einführen, so besteht das
Problem nur noch darin, die Extrema der Funktion h(y) zu finden, wobei y ein Punkt auf der Lösungsmenge der Gleichung c(x) = 0 ist. Im allgemeinen ist diese Lösungsmenge eine glatte Mannigfaltigkeit
M, die in E eingebettet ist, so dass es sich um ein Variationsproblem auf einer Mannigfaltigkeit handelt,
wie wir es am Anfang dieses Kapitels beschreiben haben. Ist zum Beispiel
h(x, y) = x + y
und c(x, y) = x2 + y 2 − 1,
(14.65)
so können wir die Lösung der Nebenbedingung in der Form x = cos ϕ und y = sin ϕ darstellen. Gesucht
sind dann die Extrema der Funktion h(ϕ) = cos ϕ + sin ϕ, die bei ϕ = π/4 ein Maximum und bei
ϕ = 5π/4 ein Minimum annimmt.
Eine alternative Methode lässt sich auch dann noch anwenden, wenn es nicht möglich oder sehr kompliziert ist, die Nebenbedingung aufzulösen. Wir betrachten dazu die erweiterte Funktion
h̃(x, λ) = h(x) − λ c(x),
131
(14.66)
wobei λ eine reelle Variable ist. Wir wollen zeigen, dass diese Funktion genau dort stationär ist, wo die
Funktion h(x) auf der Teilmenge c(x) = 0 extremal ist. Wir berechnen dazu die Variation von h̃(x, λ).
Es ist
δ h̃(x, λ) = δx · ∇h(x) − λ δx · ∇c(x) − δλ c(x).
(14.67)
Damit diese Variation für alle δλ und alle δx verschwindet, muss c(x) = 0 sein, das heißt die Nebenbedingung muss erfüllt sein, und die Richtungsableitung von h(x) muss proportional zur Richtungsableitung
von c(x) sein,
δx · ∇h(x) = λ δx · ∇c(x).
(14.68)
Nun betrachten wir solche Variationen δx, die mit der Nebenbedingung verträglich sind, also Variationen
des Punktes x innerhalb der Teilmenge, auf der das eigentlichen Extremalproblem gestellt ist. Da die
Funktion c(x) auf dieser Teilmenge konstant ist, sind das genau diejenigen Variationen, für die δc(x) =
δx · ∇c(x) = 0. Für solche Variationen verschwindet dann laut (14.68) auch δh(x).
Mit anderen Worten, wenn die Gleichung (14.68) erfüllt ist, dann ist die Funktion h(x) stationär unter
allen Variationen δx innerhalb der durch die Nebenbedingung definierten Teilmenge. Und das ist genau
die notwendige Bedingung dafür, dass ein Extremum von h(x) innerhalb der Teilmenge vorliegt.
Das Extremalproblem lässt sich also lösen, ohne dass wir die zuerst Nebenbedingung lösen müssen. Wir
demonstrieren das an dem Beispiel von oben. Aus (14.65) ergibt sich
h̃(x, y, λ) = x + y − λ (x2 + y 2 − 1),
(14.69)
δ h̃(x, y, λ) = δx (1 − 2 λ x) + δy (1 − 2 λ y) + δλ (x2 + y 2 − 1).
(14.70)
und daraus
2
2
Die erweiterte Funktion h̃(x, y, λ) ist somit
√ genau dann stationär,√wenn x = y = 1/(2 λ) und x + y = 1
ist, was unmittelbar auf x = y = 1/ 2 oder x = y = −1/ 2 führt, in Übereinstimmung mit dem
Ergebnis von oben.
Obwohl das Beispiel sehr einfach ist, macht es deutlich, dass die Lösung des Variationsproblems mit
Hilfe eines Lagrange-Multiplikators einfacher sein kann als die Zugangsweise, bei der man zuerst die
Nebenbedingung auflöst. Hier mussten wir nämlich nur eine quadratische Gleichung lösen, während wir
bei der zuerst angewandten Methode mit trigonometrischen Funktionen arbeiten mussten.
Das Verfahren lässt sich leicht verallgemeinern. Liegen mehrere Nebenbedingungen c k (x) = 0 vor,
wobei k wie üblich irgendeine Indexmenge durchläuft, so definieren wir eine erweiterte Funktion
X
h̃(x, {λk }) = h(x) −
λk ck (x),
(14.71)
k
und verlangen, dass die Variation dieser Funktion für alle Variationen δx und δλ k verschwindet. Die
Lösungen dieses Variationsproblems entsprechen den Punkten x, an denen die Funktion h(x) innerhalb
der durch die Nebenbedingungen ck (x) = 0 definierten Teilmenge stationär ist.
Aufgabe 14.24 Eine Fläche im dreidimensionalen Euklidischen Raum werde in kartesischen Koordinaten
(x, y, z) durch die Gleichung
(b2 − a2 + x2 + y 2 + 2z 2 )2 = 4b2 (x2 + y 2 + z 2 )
definiert. Gesucht ist die minimale Entfernung dieser Fläche vom Koordinatenursprung.
132
(14.72)
y
y
ds
replacements
dF
x
x
(c)
(d)
(b)
(a)
Abbildung 14.5: Die von einer Kurve umschlossene Fläche ergibt sich durch Summation über infinitesimale Dreiecke oder Kreissegmente (a). Unter allen Kurven gleicher Länge umschließt ein Kreis die größte
Fläche (b).
Das Maximalflächenproblem
Ein interessantes Variationsproblem mit Nebenbedingung, bei dem die zu maximierende Funktion ein
Funktional ist, also von unendlichen vielen Variablen abhängt, ist das folgenden Maximalfl ächenproblem.
Unter allen geschlossenen Kurven gleicher Länge in der Euklidischen Ebene ist diejenige Kurve gesucht,
die die größte Fläche umschließt.
Wenn (x, y) ein kartesisches Koordinatensystem ist, dann kann eine geschlossene Kurve durch die Koordinatenfunktionen x(s) und y(s) beschreiben werden, wobei s ein periodischer Kurvenparameter ist, so
dass x(s + 2π) = x(s) und y(s + 2π) = y(s) gilt. Wir können dieselbe Kurve auch in Polarkoordinaten
durch die Funktionen r(s) und ϕ(s) darstellen, wobei dann r(s + 2π) = r(s) und ϕ(s + 2π) = ϕ(s) + 2π z
ist. Die ganze Zahl z ∈ Z gibt an, wie oft die Kurve den Ursprung gegen den Uhrzeigersinn umläuft.
In Polarkoordinaten lässt sich die von der Kurve umschlossene Fläche besonders leicht berechnen. In
Abbildung 14.5(a) ist ein infinitesimales Kurvenstück ds dargestellt. Von diesem Kurvenstück und dem
Ursprung wird eine Fläche dF aufgespannt. Das Flächenstück kann näherungsweise als ein Kreissegment
mit dem Radius r(s) und dem Winkel dϕ = ϕ0 (s) ds betrachtet werden. Folglich hat es den Flächeninhalt
dF =
1
1
r(s) ϕ0 (s) ds =
x(s) y 0 (s) − y(s) x0 (s) ds.
2
2
(14.73)
Aufgabe 14.25 Man zeige, dass sich der angegebene Ausdruck in kartesischen Koordinaten ergibt, wenn
man x = r cos ϕ und y = r sin ϕ einsetzt.
Das Vorzeichen von dF ist positiv, wenn ϕ0 (s) positiv ist. Wenn die Kurve den Ursprung genau einmal
gegen den Uhrzeigersinn umläuft, ergibt sich die Gesamtfläche als Summe aller dieser Flächenstücke. Sie
ist folglich durch das Integral
1
F [x, y] =
2
Z 2π
x(s) y 0 (s) − y(s) x0 (s) ds
0
133
(14.74)
als Funktional der Funktionen x(s) und y(s) gegeben.
Falls der Ursprung nicht von der Kurve umschlossen wird, oder ϕ 0 (s) nicht überall positiv ist, so kann
man sich leicht überlegen, dass der Ausdruck (14.74) trotzdem den richtigen Flächeninhalt liefert. Teile der
umschlossenen Fläche werden dann mehrfach überstrichen. Die Vorzeichen der Beiträge sind aber immer
so eingerichtet, dass sich insgesamt genau einmal die Gesamtfläche ergibt. Die einzige Voraussetzung ist,
dass sich die Kurve nicht selbst schneidet und gegen den Uhrzeigersinn umläuft.
Aufgabe 14.26 Was liefert der Ausdruck (14.74), wenn die Kurve im Uhrzeigersinn uml äuft, und was
ergibt sich als “Flächeninhalt”, wenn sich die Kurve überscheidet?
Die Aufgabe besteht nun darin, das Maximum des Funktionals (14.74) zu finden. Allerdings dürfen wir
die Funktionen x(s) und y(s) nicht beliebig wählen. Sonst könnten wir die umschlossene Fläche natürlich
beliebig groß machen. Wir müssen die Suche auf solche Kurven einschränken, die eine bestimmte Länge
haben. Der Einfachheit halber soll die Gesamtlänge der Kurve gleich 2π sein, also der Periode des Kurvenparameters s entsprechen.
Das können wir wie folgt berücksichtigen. Da wir außerdem noch die Freiheit haben, die Kurve beliebig
zu parametrisieren, wählen wir den Kurvenparameter s so, dass
x0 (s)2 + y 0 (s)2 = 1
(14.75)
ist. Dann ist s ein Maß für die Kurvenlänge, und da s ein Periode von 2π hat ergibt sich automatisch eine
Gesamtlänge der Kurve von 2π.
Aufgabe 14.27 Wodurch ist die Gleichung (14.75) zu ersetzen, wenn die Kurve eine Gesamtl änge ` haben
soll?
Damit haben wir ein Variationsproblem mit Nebenbedingungen formuliert. Gesucht ist das Maximum des
Funktionals F [x, y] auf dem Raum aller periodischen Funktionen x(s) und y(s), wobei diese jedoch die
Nebenbedingung (14.75) erfüllen müssen. Es handelt sich genau genommen um einen Satz von unendlich
vielen Nebenbedingungen, denn die angegebene Gleichung muss f ür alle s gelten.
Folglich benötigen wir auch unendlich viele Multiplikatoren, um diese Nebenbedingungen in einem
erweiterten Funktional zu berücksichtigen. Für jedes s benötigen wir einen Multiplikator λ(s), den wir
mit der entsprechenden Nebenbedingung (14.75) multiplizieren und zu F [x, y] addieren. Das ergibt
1
F̃ [x, y, λ] =
2
Z 2π
Z 2π
0
0
x(s) y (s) − y(s) x (s) ds − λ(s) x0 (s)2 + y 0 (s)2 − 1 ds
0
(14.76)
0
Die Summe über alle Nebenbedingungen in (14.71) wird hier zu einem Integral, wobei die einzelnen
Nebenbedingung durch einen kontinuierlichen Parameter s indiziert werden. Das erweiterte Funktional
F̃ hängt also von drei Funktionen x(s), y(s) und λ(s) ab. Es lässt sich wie üblich als Integral über eine
“Lagrange-Funktion” schreiben,
Z 2π
F̃ [x, y, λ] = L x(s), x0 (s), y(s), y 0(s), λ(s) ds,
(14.77)
L(x, x0 , y, y 0, λ) = x y 0 − y x0 − λ (x02 + y 02 − 1).
(14.78)
0
mit
Damit dieses Funktional stationär ist, müssen die Eulerschen Gleichungen für die Funktionen x(s), y(s)
und λ(s) erfüllt sind.
134
Der einzige Unterschied zu den bisher diskutierten Variationsproblemen sind die leicht veränderten
Randbedingungen an die Funktionen x(s), y(s) und λ(s). Es sind nicht die Werte dieser Funktionen an
den Rändern eines Intervalls festgelegt, sondern es wird verlangt, dass die Funktionen periodisch sind, da
s und s + 2π denselben Punkt auf der Kurve bezeichnen. Man kann sich aber leicht klar machen, dass dies
keinen Unterschied macht.
Aufgabe 14.28 Man berechne die Variation δ F̃ des Funktionals F̃ für beliebige Variationen δx(s), δy(s)
und δλ(s). Diese müssen natürlich auch periodisch sein. Man zeige, dass dann alle beim partiellen Integrieren auftretenden Randterme wegfallen und die Variation des Funktionals genau dann verschwindet,
wenn die Eulerschen Gleichungen für die Funktionen x, y und λ erfüllt sind.
Die Eulersche Gleichung für λ ist ∂L/∂λ = 0, was unmittelbar auf die Nebenbedingung (14.75) führt.
Die anderen beiden Eulerschen Gleichungen lauten
∂L
d
−
∂x
ds
d
∂L
−
∂y
ds
∂L
d
0
− y − 2 λ x0 = 2 y 0 + 2 λ0 x0 + 2 λ x00 = 0,
0 = y −
∂x
ds
∂L
d
0
x − 2 λ x0 = −2 x0 + 2 λ0 y 0 + 2 λ y 00 = 0.
0 = −x −
∂y
ds
(14.79)
Multiplizieren wir die erste Gleichung mit x0 /2 und die zweite mit y 0 /2 und bilden anschließend die
Summe, so ergibt sich
λ0 (x02 + y 02 ) + λ (x0 x00 + y 0 y 00 ) = 0
⇒
λ0 = 0,
(14.80)
denn aus der Nebenbedingung (14.75) und ihrer Ableitung nach s folgt, dass die erste Klammer gleich
Eins und die zweite Klammer gleich Null ist. Also ist λ(s) = λ0 eine Konstante, und die zu lösenden
Gleichungen für x(s) und y(s) lauten
y 0 = −λ0 x00 ,
x0 = λ0 y 00 .
(14.81)
y(s) = y0 + a0 sin(λ0 (s − s0 )),
(14.82)
Die allgemeine Lösung ist
x(s) = x0 + a0 cos(λ0 (s − s0 )),
wobei x0 , y0 , a0 und s0 vier weitere Integrationskonstanten sind. Ohne Beschränkung der Allgemeinheit
können wir s0 = 0 setzen und a0 > 0 annehmen, was wir jederzeit durch eine Verschiebung des Kurvenparameters s 7→ s + s0 bzw. s 7→ s + π/λ0 erreichen können.
Nun müssen wir aber noch zwei Bedingungen erfüllen. Erstens muss der Kurvenparameter s eine Periode von 2π haben. Das ist genau dann der Fall, wenn λ0 = ±1 ist. Zweitens muss die Nebenbedingung
(14.75) erfüllt sein, was nur für λ0 a0 = ±1, also a0 = 1 der Fall ist. Die allgemeine Lösung der Variationsproblems lautet somit
x(s) = x0 + cos(±s),
y(s) = y0 + sin(±s),
λ(s) = ±1.
(14.83)
Je nach dem Vorzeichen ist dies entweder ein gegen den Uhrzeigersinn oder im Uhrzeigersinn parametrisierter Kreis mit Radius 1 und Mittelpunkt bei (x0 , y0 ). Berechnet man mit (14.74) die Fläche, so findet
man F = ±π. Wir haben also gezeigt, dass die von der Kurve umschlossene Fläche genau dann Extremal
ist, wenn es sich um einen Kreis handelt. Die Fläche im Sinne von (14.74) ist mit F = π maximal, wenn
der Kreis ein positive Orientierung hat, und mit F = −π minimal, wenn der Kreis negativ orientiert ist.
Aufgabe 14.29 Man kann auch die umgekehrte Frage stellen. Welches ist, unter allen Fl ächen mit dem
gleichen Inhalt, diejenige mit dem kleinsten Umfang? Wie sieht das zugeh örige Variationsproblem aus?
Was ist die Lösung?
135
replacements
(c)
(d)
(b)
(a)
Abbildung 14.6: Hängt man eine Kette in einem homogenen Gravitationsfeld an zwei Punkten auf, so
nimmt sie einen Gleichgewichtszustand minimaler potenzieller Energie an, der durch eine charakteristische Kettenlinie beschrieben wird (a). Fixiert man die Enden eines biegsamen Stabes, so nimmt dieser
ebenfalls einen Zustand minimaler Energie an (b). Die Krümmung des Stabes ist in der Mitte am größten
und verschwindet an der Enden.
Aufgabe 14.30 Das in Abbildung 14.6(a) dargestellte Extremalproblem l ässt sich im wesentlichen mit der
gleichen Methode lösen. Man muss nur ein anderes Funktional F einsetzen. Eine Kette der L änge 2 ` mit
einer konstanten Masse pro Länge wird an zwei gleich hohen Punkten im Abstand 2 a < 2 ` in einem
homogenen Gravitationsfeld aufgehängt. In der stabilen Gleichgewichtslage ist die potenzielle Energie
der Kette minimal. Die Kurve, die die Kette in dieser Lage beschreibt, heißt Kettenlinie. Man zeige, dass
die Kettenlinie in der x-z-Ebene durch die Gleichung
ω z = cosh(ω a) − cosh(ω x)
mit
sinh(ω a) = ω `
(14.84)
beschrieben wird, wenn sich die Endpunkte bei x = ±a und z = 0 befinden. Die Konstante ω > 0 wird
eindeutig durch die Parameter ` und a festgelegt.
Aufgabe 14.31 Für die nächste Aufgabe benötigen wir den Begriff der Krümmung einer Kurve λ(s)
in einem metrischen affinen Raum. Ist die Kurve so parametrisiert, dass s die Kurvenl änge misst, also
|λ0 (s)| = 1, so ist die Krümmung K(s) an der Stelle s der Betrag der zweiten Ableitung K(s) = |λ 00 (s)|.
Man zeige, dass die Krümmung einer Kreislinie der inverse Radius des Kreises ist. Wie lässt sich K(s)
berechnen, wenn die Parameter s nicht die die Länge misst?
Aufgabe 14.32 Ein etwas anspruchsvolleres Variationsproblem mit Nebenbedingung ist in Abbildung 14.6(b) dargestellt. Ein elastischer Stab der Länge 2 ` wird durch eine Kurve λ(s) mit |λ0 (s)| = 1
und −` ≤ s ≤ ` beschrieben. Die potenzielle Energie des Stabes ist eine Funktion seiner Kr ümmung,
integriert über die Länge. Wir nehmen an, dass die Energie proportional zum Quadrat der Kr ümmung ist,
also
Z `
κ
E[λ] =
λ00 (s) · λ00 (s) ds,
(14.85)
2
−`
wobei κ eine Konstante ist. Fixiert man die Enden des Stabes im Abstand 2 a < 2 `, zum Beispiel an den
Punkten λ(±`) = o ± a ex , so nimmt der Stab einen Zustand kleinster Energie an. Man zeige, dass dieser
durch die Differenzialgleichung
λ000 (s) = c − λ00 (s) · λ00 (s) + c · λ0 (s) λ0 (s)
(14.86)
136
beschrieben wird, wobei c ein konstanter Vektor ist. Dies ist eine Differenzialgleichung dritter Ordnung,
so dass wir drei Randbedingungen benötigen, um eine eindeutige Lösung zu bekommen, und eine zusätzliche Randbedingung, um die Konstante c zu bestimmen. Man zeige, dass sich neben den bereits gestellten
Randbedingungen λ(±`) = o ± a ex aus der Forderung, dass die Energie stationär sein soll, die zusätzlichen Randbedingungen λ00 (±`) = 0 ergeben. Im Zustand kleinster Energie verschwindet die Kr ümmung
an den Enden des Stabes.
Aufgabe 14.33 Beim Geodätenproblem geht es darum, die k ürzeste Verbindung zwischen zwei Punkten
auf einer vorgegebenen Fläche zu finden, die in einen metrischen Raum eingebettet ist. Man zeige, dass die
kürzeste Verbindung zwischen zwei Punkten auf einer Kugeloberfl äche ein Großkreis ist, also ein Kurve,
die sich als Schnittmenge der Kugeloberfläche mit einer Ebene durch ihren Mittelpunkt ergibt.
Zwangsbedingungen
Offenbar entsprechen die beiden Zugangsweisen zu einem Variationsproblem mit Nebenbedingungen gerade den zwei möglichen Beschreibungen eines mechanischen Systems mit holonomen Zwangsbedingungen, die wir im Kapitel 12 kennen gelernt haben.
Wir können ein solches System durch eine erweiterte Lagrange-Funktion L̃ auf dem erweiterten Konfie beschreiben, die dann zusätzlich zum Ort q und der Geschwindigkeit q̇ von einem Satz
gurationsraum Q
von Lagrange-Multiplikatoren λk abhängt,
X
Le = L(q, q̇, t) −
λk C k (q).
(14.87)
k
Die Langrangeschen Gleichungen für die Multiplikatoren λk sorgen dann dafür, dass die Zwangsbedingungen C k = 0 zu jedem Zeitpunkt erfüllt sind, und die entsprechenden Gleichungen für die Koordinaten q µ
bestimmen die eigentliche Bewegung sowie die Zwangskräfte. Explizit lauten die Bewegungsgleichungen
d ∂ Le
∂ Le
d ∂L
∂L X ∂C k
−
=
−
+
λk µ = 0,
dt ∂ q̇ µ ∂q µ
dt ∂ q̇ µ ∂q µ
∂q
k
∂ Le
= C k = 0.
∂λk
(14.88)
Offenbar sind dies die Eulerschen Gleichungen, die zu dem aus L̃ gebildeten Wirkungsfunktional gehören,
e {λk }] =
S[q,
t2
Z
L(q, q̇, t) −
t1
X
k
λk C k (q) dt
(14.89)
Die erweiterte Wirkung Se hängt von einer Bahn q(t) und den Multiplikator-Funktionen λk (t) ab, und
das Wirkungsprinzip besagt in diesem Fall, dass das Funktional Se für die tatsächlich realisierte Bahn
q(t) stationär ist. Als Randbedingungen müssen wir dazu wieder die Konfigurationen q(t 1 ) = q1 und
q(t2 ) = q2 vorgeben.
Wichtig ist an dieser Stelle, dass die Bahnen q(t), die wir in (14.89) einsetzen können, beliebige Bahnen im erweiterten Konfigurationsraum sind, also auch solche, die mit den Zwangsbedingungen nicht
verträglich sind. Die physikalische realisierte Bahn ist jedoch immer mit ihnen verträglich, denn das Funktional ist nur dann stationär, wenn die Gleichungen (14.88) erfüllt sind.
Eine andere Möglichkeit, sich die Bewegungsgleichungen zu verschaffen, besteht darin, erst die
Zwangsbedingungen zu lösen, zu einem reduzierten Konfigurationsraum überzugehen, und dort dann nur
noch die reduzierte Lagrange-Funktion
L = L(q, q̇, t)
(14.90)
137
zu betrachten, wobei q ∈ Q jetzt ein Ort im reduzierten Konfigurationsraum ist, und entsprechend q̇ ∈
T Q ein Geschwindigkeitsvektor im zugehörigen Tangentenraum. Nun lauten die Bewegungsgleichungen
nur noch
∂L
d ∂L
= 0,
(14.91)
α −
dt ∂ q̇
∂q α
wobei q α die reduzierten Koordinaten eines Punktes q ∈ Q und q̇ α die entsprechenden Geschwindigkeiten
sind. Auch diese Bewegungsgleichungen können wir aus einem Wirkungsprinzip ableiten. Die entsprechende reduzierte Wirkung ist
Z t2
(14.92)
S[q] = L(q, q̇, t) dt.
t1
Die Bahn q(t) ist jetzt eine Bahn, die ganz im reduzierten Konfigurationsraum Q liegt, die also zu jedem
Zeitpunkt die Zwangsbedingungen erfüllt.
Wir verstehen nun auch, warum die beiden Formulierungen der Bewegungsgleichungen äquivalent sind.
Das Wirkungsprinzip ist nämlich in beiden Fällen dasselbe. Gesucht ist diejenige Bahn, die unter allen mit
den Zwangsbedingungen verträglichen Bahnen die Wirkung extremal macht. Dieses Problem können wir
auf zwei unterschiedliche Arten angehen, nämlich entweder indem wir die Zwangsbedingungen zuerst
lösen und dann verlangen, dass die Wirkung stationär wird, oder indem wir die Methode der Lagrangeschen Multiplikatoren verwenden und das Wirkungsprinzip als Variationsproblem mit Nebenbedingungen
formulieren.
138
15 Hamiltonsche Mechanik
Wie bereits an anderer Stelle kurz erwähnt, stellt das Wirkungsprinzip so etwas wie das Bindeglied zwischen der klassischen Physik und der Quantenphysik her. Wenn man für ein bestimmtes mechanisches
System ein Wirkungsprinzip angeben kann, dann lässt sich dasselbe System auch im Rahmen der Quantenmechanik konsistent beschreiben.
Wie dieser Übergang von der klassischen zur Quantenmechanik aussieht, ist natürlich nicht Inhalt dieser
Vorlesung. Man kann den Übergang jedoch bereits im Rahmen der klassischen Physik vorbereiten und ihn
damit sowohl technisch als auch konzeptuell erleichtern. Wir formulieren dazu das Wirkungsprinzip aus
dem letzten Kapitel ein wenig um, und gelangen so zur Hamiltonschen Formulierung der Bewegungsgleichungen für ein mechanisches System.
Unabhängig von ihrer Bedeutung für die Quantenmechanik haben die Bewegungsgleichungen in dieser
Form auch in der klassischen Mechanik einige sehr nützliche Eigenschaften. So können wir zum Beispiel
die Zeitentwicklung eines Systems in einer geometrisch sehr anschaulichen Art und Weise darstellen.
Darüber hinaus können wir einige Sätze über Erhaltungsgrößen beweisen, die das Auffinden von Lösungen
erleichtern.
Die Wirkung erster Ordnung
Ein Extremalproblem, das von mehreren Variablen abhängt, kann man schrittweise lösen. Ist zum Beispiel
das Minimum einer Funktion (x, y) 7→ h(x, y) gesucht, so können wir zuerst x als Konstante betrachten
und das Minimum der Funktion y 7→ h(x, y) suchen. Nehmen wir an, diese Funktion hätte ein Minimum
bei y = ymin (x), wobei der Wert von ymin im allgemeinen von x abhängen wird. Im zweiten Schritt
betrachten wir dann die Funktion x 7→ h(x, ymin (x)). Wenn diese Funktion bei x = x0 ein Minimum hat,
so liegt das gesuchte Minimum der Funktion (x, y) 7→ h(x, y) bei x = x0 und y = ymin (x0 ).
Wir können auch umgekehrt vorgehen, also zuerst y als Konstante betrachten und die Funktion x 7→
h(x, y) minimieren. Nehmen wir wieder an, das Minimum dieser Funktion befinde sich bei x = x min (y).
Dann müssen wir nur noch die Funktion y 7→ h(xmin (y), y) minimieren, um das gestellte Extremalproblem
zu lösen. Wenn das Minimum dieser Funktion bei y = y0 liegt, so finden wir das Minimum der Funktion
h(x, y) diesmal bei x = xmin (y0 ) und y = y0 . Da das Ergebnis in beiden Fällen dasselbe sein muss, gilt
natürlich x0 = xmin (y0 ) bzw. y0 = ymin (x0 ).
Ein typisches Beispiel für ein Extremalproblem dieser Art ist, die kürzeste Verbindung zwischen zwei
Teilmengen eines metrischen Raumes zu finden. Ist x ein Punkt in der ersten Teilmenge, y ein Punkt in
der zweiten Teilmenge, so ist der Abstand dieser Punkte eine Funktion d(x, y) der beiden Punkte. Man
findet den minimalen Abstand der beiden Teilmengen, indem man zuerst für jeden Punkt x in der einen
Teilmenge den nächsten Punkt y in der zweiten Teilmenge sucht, und anschließend denjenigen Punkt x
auswählt, für den dieser minimale Abstand wiederum minimal wird.
Eigentlich ist es aber nicht diese Lösungsstrategie für spezielle Extremalprobleme, die uns an dieser Stelle interessiert, sondern ein ganz anderer Aspekt, der sich aus diesen Überlegungen ergibt. Betrachten wir noch einmal die jeweils im zweiten Schritt auftretenden, zu minimierenden Funktionen
x 7→ h(x, ymin (x)) bzw. y 7→ h(xmin (y), y). Beides sind Funktion, die von jeweils einer reellen Variablen abhängen. Es sind jedoch im allgemeinen völlig andere Funktionen, denen man unter Umständen
gar nicht mehr ansieht, dass sie sich auf die dargestellte Art und Weise aus einer Funktion h(x, y) ableiten
lassen. Trotzdem sind die beiden durch diese Funktionen definierten Extremalprobleme in einem gewissen
Sinne äquivalent. Beide lösen dasselbe, ursprünglich gestellte Extremalproblem, das von zwei Variablen
abhing.
Nehmen wir nun an, der Ausgangspunkt sei gar nicht dieses Problem, sondern das Extremalproblem für
die Funktion x 7→ h(x, ymin (x)). Dann können wir dieses Extremalproblem auf ein äquivalentes Problem
139
abbilden, nämlich auf das für die Funktion y 7→ h(xmin (y), y), indem wir gewissermaßen einen “Umweg”
über das Extremalproblem für (x, y) 7→ h(x, y) machen. Unter Umständen kann dieser Umweg nützlich
sein, etwa wenn das äquivalente Extremalproblem eine sehr viel einfachere Lösung besitzt.
Auf dieser Idee beruht im wesentlichen die Hamiltonsche Formulierung der Bewegungsgleichungen
eines mechanisches Systems, die wir im folgenden herleiten wollen. Man geht von dem bekannten Wirkungsprinzip aus, und ersetzt dieses durch ein anderes, äquivalentes Wirkungsprinzip, aus dem man
schließlich eine neue, etwas einfachere Darstellung der Bewegungsgleichungen erhält.
Es sei also ein mechanisches System gegeben mit einem Konfigurationsraum Q und einer LagrangeFunktion L(q, v, t), mit q ∈ Q und v ∈ T Q. Die Wirkung einer Bahn q(t) mit den Randbedingungen
q(t1 ) = q1 und q(t2 ) = q2 ist dann
S[q] =
Z
t2
t1
L q(t), q̇(t), t dt,
(15.1)
und das Wirkungsprinzip verlangt, dass dieses Funktional für die physikalische Bahn stationär wird.
Da wir im folgenden zwischen der Geschwindigkeit als Argument der Lagrange-Funktion und der Geschwindigkeit als Ableitung einer Bahn nach der Zeit unterscheiden müssen, verwenden wir für das Argument der Lagrange-Funktion ein anderes Symbol. Wir schreiben also L(q, v, t), um deutlich zu machen, dass die Lagrange-Funktion von einem Punkt q ∈ Q im Konfigurationsraum und von einem Vektor
v ∈ T Q im Tangentenraum abhängt. Zwischen diesen Argumenten besteht zunächst kein Zusammenhang.
Erst, wenn wir die Lagrange-Funktion entlang einer Bahn q(t) auswerten, so wie dies in (15.1) geschieht, ist es sinnvoll, für q den Punkt q(t) und für v die Zeitableitung q̇(t) einzusetzen. Diesen Umstand
haben wir bisher durch eine etwas verkürzte Notation verschleiert. Es sollte aber klar sein, dass es erst
dann einen Sinn hat, von einer Geschwindigkeit als Zeitableitung des Ortes zu sprechen, wenn dieser eine
Funktion der Zeit ist.
Man kann nun dieses “Einsetzen” der Bahn in die Lagrange-Funktion und das anschließende Berechnen der Wirkung noch auf eine andere Art und Weise beschreiben. Wir betrachten dazu das erweiterte
Wirkungsfunktional, das sich ergibt, wenn wir die Funktionen q(t) und v(t) als voneinander unabhängig
betrachten. Wir verlangen also nicht, dass v(t) = q̇(t) ist. Wir bekommen dann ein Funktional, dass von
zwei Funktionen abhängt, nämlich
S[q, v] =
Z
t1
t2
L q(t), v(t), t dt.
(15.2)
Das Wirkungsprinzip besagt nun, dass die physikalisch realisierte Bahn dieses Funktional stationär macht,
allerdings nicht um Raum aller Funktionen q(t) und v(t), sondern in einem Teilraum davon, nämlich in
demjenigen Unterraum, der durch die Beziehung v(t) = q̇(t) bestimmt wird.
Das ist eine an die Argumente des Funktionals gestellte Nebenbedingung, die wir mit Hilfe von
Lagrange-Multiplikatoren berücksichtigen können. Die Gleichung v(t) = q̇(t) muss zu jedem Zeitpunkt
erfüllt sein, und sie setzt sich als Vektorgleichung aus dim Q Komponenten v µ (t) = q̇ µ (t) zusammen. Wir
brauchen deshalb für jeden Zeitpunkt t und für jeden Wert des Index µ einen Multiplikator. Wir bezeichnen diese Multiplikatoren mit pµ (t) und fassen die Komponenten zu einem dualen Vektor p(t) zusammen,
der selbst wieder zu einer Funktion der Zeit wird.
Dann lässt sich das Wirkungsprinzip wie folgt formulieren. Wir betrachten alle möglichen Bahnen q(t)
von q(t1 ) = q1 nach q(t2 ) = q2 , sowie alle glatten Funktionen v(t) und p(t) für t1 ≤ t ≤ t2 , an die
wir keine weiteren Randbedingungen stellen müssen. Als Funktional davon definieren wir die erweiterte
140
Wirkung
S[q, v, p] =
Z t2
t1
µ
µ
L q(t), v(t), t + pµ (t) q̇ (t) − v (t)
dt.
(15.3)
Schließlich verlangen wir, dass die physikalische Bahn diejenige ist, für die dieses Funktional stationär
wird, und zwar bei einer gleichzeitigen Variation aller Argumente, also der Funktionen q(t), v(t) und
p(t).
Obwohl es sich eigentlich aus der Konstruktion ergibt, wollen wir zeigen, dass aus diesem Wirkungsprinzip tatsächlich wieder auf die ursprünglichen Bewegungsgleichungen folgen. Wir variieren zuerst die
Funktion p(t). Das ergibt unmittelbar
δS[q, v, p] =
Z
t2
t1
δpµ (t) q̇ µ (t) − v µ (t) dt.
(15.4)
Die Wirkung ist genau dann bei einer beliebigen Variation δpµ (t) der Lagrange-Multiplikatoren pµ (t) stationär, wenn die Geschwindigkeiten v µ (t) die Zeitableitungen der Koordinatenfunktionen q µ (t) sind. Das ist
natürlich nicht weiter überraschend, denn genau das hatten wir als Nebenbedingung gefordert, und dafür
die Funktionen pµ (t) als Lagrange-Multiplikatoren eingeführt. Aus dem erweiterten Wirkungsprinzip folgt
also
v µ (t) = q̇ µ (t).
(15.5)
Als nächstes betrachten wir eine Variation der Funktion v(t). Für diese gilt
δS[q, v, p] =
Z
t2
δv µ (t)
t1
∂L
q(t),
v(t),
t
−
p
(t)
dt.
µ
∂v µ
(15.6)
Dieser Ausdruck verschwindet genau dann für alle δv µ (t), wenn
pµ (t) =
∂L
µ q(t), v(t), t
∂v
(15.7)
ist. Wenn L, wie es üblicherweise für ein mechanisches System der Fall ist, durch T − V gegeben ist, und
wenn nur die kinetische Energie T von der Geschwindigkeit abhängt, so stehen auf der rechten Seite dieser
Gleichung die verallgemeinerten Impulse, die wir ursprünglich als Ableitungen der kinetischen Energie
nach den Komponenten der Geschwindigkeit definiert hatten.
Es liegt deshalb nahe, diese Definition noch weiter zu verallgemeinern, und die Größen p µ (t) auch dann
als Impulse zu bezeichnen, wenn die Lagrange-Funktion nicht von der speziellen Form L = T − V ist. Wir
ändern unsere Definition aus Kapitel 11 ab, indem wir den Impuls nicht mehr als Ableitung der kinetischen
Energie nach der Geschwindigkeit definieren, sondern statt dessen von der Lagrange-Funktion ausgehen.
Der Impuls eines mechanischen Systems ist die Ableitung der Lagrange-Funktion nach der
Geschwindigkeit.
Das erklärt auch, warum es sinnvoll war, die Multiplikatoren pµ (t) zu einem dualen Vektor p(t) zusammenzufassen. Da L ein Skalar ist und v µ die Komponenten eines Vektors sind, sind pµ = ∂L/∂v µ die
Komponenten eines dualen Vektors. Der in (15.3) unter dem Integral gebildete Ausdruck ist das Produkt
des dualen Vektors p(t) mit dem Vektor v(t) − q̇(t), also wieder ein Skalar. Die erweiterte Wirkung ist somit unabhängig davon, in welchem Koordinatensystem wir sie ausrechnen, wenn wir alle dort auftretenden
Größen entsprechend transformieren.
141
Nun müssen wir noch zeigen, dass die erweiterte Wirkung auch tatsächlich die richtigen Bewegungsgleichungen liefert. Wir müssen dazu noch eine Variation der Bahn q(t) betrachten. Das ergibt
δS[q, v, p] =
Z t2
δq µ (t)
t1
∂L
µ
q(t),
v(t),
t
+
δ
q̇
(t)
p
(t)
dt.
µ
∂q µ
(15.8)
Im Gegensatz zu den beiden vorherigen Variationen müssen wir hier eine partielle Integration durchführen,
um die Zeitableitung von der Variation δ q̇ µ (t) zu entfernen. Es tritt also ein Randterm auf,
h
µ
δS[q, v, p] = δq (t) pµ (t)
i t2
t1
+
Z
t1
t2
∂L
δq (t)
q(t), v(t), t − ṗµ (t) dt.
∂q µ
µ
(15.9)
Der Randterm verschwindet jedoch, da wir an die Bahn q(t) die üblichen Randbedingungen stellen, also
die Anfangs- und Endkonfiguration festgelegen. Daher verschwindet δq µ (t) bei t = t1 und t = t2 . Es
bleibt schließlich die Gleichung
∂L
(15.10)
ṗµ (t) = µ q(t), v(t), t .
∂q
Fassen wir das Ergebnis noch einmal wie folgt zusammen. Die erweiterte Wirkung (15.3) ist genau dann
stationär, wenn die Funktionen q(t), v(t) und p(t) den Gleichungen
v µ (t) = q̇ µ (t),
pµ (t) =
∂L
µ q(t), v(t), t ,
∂v
ṗµ (t) =
∂L
µ q(t), v(t), t
∂q
(15.11)
genügen. Dass diese Gleichungen zu den ursprünglichen Bewegungsgleichungen äquivalent sind, sieht
man nun sehr leicht. Man muss nur die Funktionen v(t) und p(t) eliminieren, indem man die ersten beiden
Gleichungen in die dritte Gleichung einsetzt. Das führt unmittelbar auf die Euler-Lagrange-Gleichung
∂L
d ∂L
µ q(t), q̇(t), t −
µ q(t), q̇(t), t = 0.
dt ∂ q̇
∂q
(15.12)
Aufgabe 15.1 Man wiederhole die einzelnen Schritte in diesem Kapitel f ür den speziellen Fall eines mechanisches Systems mit einem Freiheitsgrad mit L(q, v) = m v 2 /2 − V (q).
Aufgabe 15.2 Bei der Herleitung der Bewegungsgleichungen aus der erweiterten Wirkung sind wir
schrittweise vorgegangen, indem wir zuerst nur die Funktion p(t) variiert haben, dann nur die Funktion v(t), und schließlich nur die Funktion q(t). Das Wirkungsprinzip verlangt jedoch, dass die Wirkung
unter einer gleichzeitigen Variation aller Argumente stationär ist. Genau genommen haben wir aber nur
sehr spezielle Richtungsableitungen des Funktionals (15.3) berechnet und von diesen verlangt, dass sie
Null sind. Warum führt dieses Vorgehen trotzdem zum richtigen Resultat?
Die Hamilton-Funktion
Was haben wir mit diesem nochmaligen Umschreiben der Bewegungsgleichungen nun eigentlich gewonnen? Sind die neuen Gleichungen (15.11) nicht viel komplizierter als die alten Euler-LagrangeGleichungen (15.12)? In einem gewissen Sinne schon, da sie von mehr Funktionen abhängen, aber in
einem anderen Sinne sind sie auch einfacher. Sie bilden nämlich ein System von Differenzialgleichungen
erster Ordnung. Es kommen nur noch die ersten Ableitungen der gesuchten Funktionen nach der Zeit vor,
und die Gleichungen sind sogar nach diesen aufgelöst.
142
Die mittlere der drei Bewegungsgleichungen ist darüber hinaus noch nicht einmal eine echte Differenzialgleichung. Wir werden dies jetzt benutzen, um eine der beiden Hilfsfunktionen wieder zu eliminieren.
Dazu benutzen wir die am Anfang beschriebene Methode. Ein Variationsproblem können wir schrittweise
lösen. Wir betrachten zuerst nur eine Variation der Funktion v(t), während wir die Funktionen q(t) und
p(t) festhalten. Wie wir gesehen haben, führt dies auf die Gleichung
pµ (t) =
∂L
µ q(t), v(t), t .
∂v
(15.13)
Sie stellt eine Beziehung zwischen den Größen p(t), v(t) und q(t) her, die zu jedem Zeitpunkt t gelten
muss. Es treten dabei keine Zeitableitungen auf, so dass die Gleichung zu jedem Zeitpunkt unabhängig
von den Gleichungen zu allen anderen Zeitpunkten ist.
Wir nehmen nun an, dass diese Gleichung nach v(t) auflösbar ist. Mit anderen Worten, wir können
v(t) als Funktion von q(t) und p(t) darstellen. Für typische mechanische Systeme, wie wir sie bisher
kennen gelernt haben, ist dies immer der Fall. Die Geschwindigkeit ist immer eindeutig durch den Impuls
bestimmt, wobei der Zusammenhang aber vom Ort abhängen kann, zum Beispiel wenn wir ein krummliniges Koordinatensystem benutzen oder Zwangsbedingungen vorliegen. Für Systeme mit zeitabhängigen
Zwangsbedingungen kann der Zusammenhang auch zeitabhängig sein.
Wenn diese Voraussetzung erfüllt ist, können wir die Geschwindigkeit v(t) immer so bestimmen, dass
das Funktional S[q, v, p] bezüglich einer Variation von v(t) stationär ist. Es bleibt dann noch ein reduziertes Funktional
S[q, p] =
Z t2
t1
h
i
pµ (t) q̇ µ (t) − pµ (t) v µ (t) − L q(t), v(t), t
= ( , ,t)
dt,
(15.14)
das nur noch von den Funktionen q(t) und p(t) abhängt, und dessen Variation bezüglich dieser Funktionen
für die physikalischen Bahnen verschwinden muss.
In der eckigen Klammer müssen wir für v(t) die in (15.13) gefundene Lösung einsetzen, was durch die
etwas verkürzte Notation v = v(q, p, t) angedeutet werden soll. Wir wollen uns diesen Ausdruck etwas
genauer ansehen. Es handelt sich um eine Funktion, die nur von q(t), p(t) und t abhängt, nicht aber von
den Ableitungen dieser Größen oder ihren Werten zu anderen Zeitpunkten. Das folgt aus der Tatsache,
dass die Gleichung (15.13), die v(t) als Funktion von q(t) und p(t) bestimmt, zwar im allgemeinen von
der Zeit t abhängen kann, aber keine Zeitableitungen enthält und alle drei Größen nur zu einem Zeitpunkt
eingehen.
Man nennt den Ausdruck in der eckigen Klammer die Hamilton-Funktion des mechanischen Systems.
Eine sehr elegante Art und Weise, die Hamilton-Funktion darzustellen, ist
HamiltonFunktion
H(q, p, t) = Ext pµ v µ − L(q, v, t) ,
(15.15)
wobei Ext für das Extremum im Raum aller Geschwindigkeiten v steht. Wie wir gleich sehen werden,
handelt es sich typischerweise um ein Maximum, aber darauf kommt es nicht an. Tatsächlich liefert das
Extremum des Ausdrucks (15.15) bis auf ein Vorzeichen genau die eckige Klammer in (15.14). Das Extremum liegt nämlich bei der Geschwindigkeit v, für die pµ = ∂L/∂v µ ist.
Am besten machen wir uns dies an ein paar Beispielen klar. Zunächst betrachten wir ein Teilchen in einer
Raumrichtung, das sich in einem Potenzial bewegt. Seine Lagrange-Funktion ist L(q, v) = m v 2 /2−V (q).
Sie hängt nicht explizit von der Zeit ab, so dass auch die Hamilton-Funktion nicht zeitabhängig ist. Man
findet
p2
m 2
+ V (q).
(15.16)
H(q, p) = Ext p v − v + V (q) =
v
2
2m
143
Hier haben wir verwendet, dass der Ausdruck in der Klammer sein Extremum bei v = p/m annimmt
und dies dann für v eingesetzt. Wie man leicht sieht, ist die Hamilton-Funktion in diesem Fall gerade die
Gesamtenergie des Teilchens, ausgedrückt als Funktion von Ort und Impuls.
Das gilt sogar ganz allgemein. Wenn nämlich L = T − V ist, und T eine quadratische Funktion der
Geschwindigkeit ist, die wir durch eine symmetrische Massenmatrix darstellen können, während V nur
vom Ort abhängt, so findet man
1
∂L
Mµν (q) v µ v ν − V (q) ⇒ pµ = µ = Mµν (q) v ν .
(15.17)
2
∂v
Für mechanische Systeme ist die kinetische Energie immer positiv, also ist die Massenmatrix invertierbar.
Wie bezeichnen die inverse Matrix mit M µν (q), und können dann die Geschwindigkeit als Funktion des
Ortes und des Impulses darstellen,
L(q, v) =
M µν (q) Mνρ (q) = δ µρ
⇒
v µ = M µν (q) pν .
(15.18)
Nun können wir die Hamilton-Funktion berechnen. Es ist
1
1
H(q, p) = Ext pµ v µ − Mµν (q) v µ v µ + V (q) = M µν (q) pµ pν + V (q).
(15.19)
2
2
Der erste Summand ist, wie man sich leicht überzeugt, wieder die kinetische Energie, jetzt allerdings dargestellt als Funktion des Ortes q und des Impulses p. Und der zweite Summand ist natürlich die potenzielle
Energie.
Der Übergang von der Lagrange-Funktion, die eine Funktion von Ort und Geschwindigkeit ist, zur
Hamilton-Funktion als Funktion von Ort und Impuls, bewirkt in diesem Fall, dass sich das relative Vorzeichen von kinetischer und potenzieller Energie umkehrt. Allerdings gilt dieser Zusammenhang nur dann,
wenn sich die Lagrange-Funktion in der Form L = T − V darstellen lässt, und T quadratisch von der
Geschwindigkeit abhängt. Dann ist H = T + V, also die Gesamtenergie.
Wenn die Lagrange-Funktion nicht von dieser speziellen Form ist, ist es trotzdem sinnvoll, die HamiltonFunktion mit der Energie des Systems zu identifizieren. In diesem Fall ist nämlich die Größe Energie noch
gar nicht definiert. Die einzige Stelle, an der wir diesen Begriff bisher im Rahmen der Lagrangeschen
Mechanik verwendet haben, war die Definition der Lagrange-Funktion als Differenz von kinetischer und
potenzieller Energie. Wir nehmen uns daher die Freiheit, den Begriff Energie auf diese Weise zu verallgemeinern.
Die Hamilton-Funktion repräsentiert die Gesamtenergie eines mechanischen Systems als
Funktion von Ort und Impuls.
Warum das sinnvoll ist, werden wir in den nächsten Abschnitten sehen. Unter bestimmten Voraussetzungen
ist nämlich die Hamilton-Funktion eine Erhaltungsgröße, und zwar unabhängig davon, ob L = T − V
und somit H = T + V ist oder nicht. Dies führt auf eine Verallgemeinerung des Energieerhaltungsatzes,
wenn man den Begriff der Energie entsprechend verallgemeinert.
Fassen wir an dieser Stelle noch einmal kurz zusammen, was wir bisher getan haben. Ausgehend von
der Lagrange-Funktion und dem daraus abgeleiteten Wirkungsprinzip (15.1) sind wir zu einer alternativen,
aber äquivalenten Formulierung übergegangen, bei dem die Wirkung durch (15.14) oder
S[q, p] =
t2
Z
t1
µ
pµ (t) q̇ (t) − H q(t), p(t), t
dt
(15.20)
als Funktional der Funktionen q(t) und p(t) gegeben ist. Die Hamilton-Funktion H(q, p, t) ergibt sich
dabei durch (15.15) aus der Lagrange-Funktion L(q, v, t). Jetzt müssen wir nur noch verlangen, dass
diese Wirkung stationär wird, um die physikalischen Bahnen zu finden.
144
Aufgabe 15.3 Der Übergang von der Lagrange- zur Hamilton-Funktion wird in der Mathematik als
Legendre-Transformation bezeichnet. Sie ist, ähnlich wie die Fourier-Transformation, eine Abbildung
zwischen Funktionen, die von verschiedenen Argumenten abh ängen. Man zeige, dass die Umkehrung
der Legendre-Transformation wieder eine solche Transformation ist. Man kann also aus der HamiltonFunktion H(q, p, t) wieder die Lagrange-Funktion L(q, v, t) bestimmen, indem man das Extremum
(15.21)
L(q, v, t) = Ext pµ v µ − H(q, p, t)
bildet. Die Transformation L(q, v) ↔ H(q, p) ist in diesem Sinne symmetrisch. Man verifiziere dies
explizit am Beispiel eines Teilchens im Potenzial in einer Raumdimension.
Aufgabe 15.4 Wenn der Konfigurationsraum Q des mechanischen Systems eine glatte Mannigfaltigkeit
ist, so hatten wir am Ende von Kapitel 13 gezeigt, dass die Lagrange-Funktion L eine reelle Funktion, also ein skalares Feld auf dem Tangentenbündel T(Q) ist. Auf welchem Raum ist in diesem Fall die
Hamilton-Funktion H eine reelle Funktion? Warum ist sie unabhängig von dem in der Definition (15.15)
verwendeten Koordinatensystem?
Aufgabe 15.5 Bekanntlich ist die Lagrange-Funktion eines geladenen Teilchens im elektromagnetischen
Feld durch den Ausdruck (11.77) gegeben,
L(r, v) =
1
q
m v · v + A(r, t) · v − q φ(r, t),
2
c
(15.22)
wobei A(r, t) das magnetische Vektorpotenzial und φ(r, t) das elektrische Potenzial sind. Wie sieht die
Hamilton-Funktion aus? Welcher Zusammenhang besteht zwischen dem Impuls p und der Geschwindigkeit
v?
Bewegungsgleichungen und Phasenraum
Nun kommen wir zurück zu den eigentlichen Bewegungsgleichungen des mechanischen Systems. Wie
wir gerade gezeigt haben, ergeben sie sich aus dem Wirkungsprinzip (15.20), das heißt das dort definierte
Funktional muss für physikalische Bahnen stationär sein. Als Randbedingungen geben wir wieder die
Konfigurationen q(t1 ) = q1 am Anfang und q(t2 ) = q2 am Ende des Zeitintervalls vor. An die Impulse
p(t1 ) und p( t2 ) müssen wir keine Einschränkungen machen.
Die Bewegungsgleichungen, die sich daraus ergeben, haben eine sehr einfache Form. Variieren wir
zuerst wieder die Funktion p(t), so finden wir
δS[q, p] =
Z
t2
t1
∂H
δpµ (t) q̇ (t) −
q(t), p(t), t dt.
∂pµ
µ
(15.23)
Entsprechend ergibt eine Variation von q(t), nachdem wir die übliche partielle Integration durchgeführt
haben,
Z t2
∂H
(15.24)
δS[q, p] = − δq µ (t) ṗµ (t) + µ q(t), p(t), t dt.
∂q
t1
Damit die Wirkung stationär ist, müssen die folgenden Bewegungsgleichungen erfüllt sind.
Hamiltonsche
Bewegungsgleichungen
q̇ µ =
∂H
,
∂pµ
145
ṗµ = −
∂H
.
∂q µ
(15.25)
Dies ist ein System von Differenzialgleichungen erster Ordnung, die bereits nach den Ableitungen der
Funktionen q(t) und p(t) aufgelöst sind. Einfacher lassen sich die Bewegungsgleichungen für ein mechanisches System eigentlich nicht mehr darstellen.
Viele typische Eigenschaften von mechanischen Systemen können wir aus diesen Hamiltonschen Bewegungsgleichungen sofort ablesen. So zum Beispiel die Eigenschaft, dass die Zeitentwicklung eines Systems eindeutig festgelegt ist, wenn wir zu irgendeinem Zeitpunkt t 0 sowohl den Ort q(t0 ) = q0 als auch
den Impuls p(t0 ) = p0 kennen. In diesem Sinne ist der Zustandsraum des Systems, also die Menge aller
Bewegungszustände, die das System annehmen kann und die die Zeitentwicklung eindeutig festlegen, nun
der Raum aller Orte q und Impulse p. Man nennt diesen Raum den Phasenraum.
Der Phasenraum P eines mechanischen Systems ist der Menge aller Bewegungszust ände,
dargestellt durch den Ort q ∈ Q und den Impuls p ∈ T Q.
Ist der Konfigurationsraum Q des System ein affiner Raum, so ist der Ort q ∈ Q ein Punkt in diesem
Raum und der Impuls ein dualer Vektor p ∈ T∗ Q. Folglich ist der Phasenraum der Produktraum P =
Q × T∗ Q. Dies ist wieder ein affiner Raum, wobei dim P = 2 dim Q ist. Der Phasenraum hat also für
jeden Freiheitsgrad zwei Dimensionen.
Wenn der Konfigurationsraum Q kein affiner Raum ist, sondern nur eine glatte Mannigfaltigkeit, so
müssen wir zusätzlich beachten, dass der duale Vektor p ein Vektor am Bezugspunkt q ist, also im Kotangentenraum T ∗ Q. Der Phasenraum ist dann die Menge aller Paare (q, p) mit q ∈ Q und p ∈ T ∗ Q. Das
ist das Kotangentenbündel P = T∗ (Q) des Konfigurationsraum, also der zu dem am Ende von Kapitel 13
eingeführten Tangentenbündel T(Q) duale Raum.
Auf jeden Fall ist der Phasenraum ein 2 N -dimensionaler Raum, wenn das System N Freiheitsgrade
besitzt. Zu jedem Koordinatensystem {q µ } auf Q gehört ein Satz von verallgemeinerten Impulsen {pµ },
die die Komponenten eines dualen Vektors bilden. Man bezeichnet die Größen {p µ } in der Hamiltonschen
Mechanik auch als die den Koordinaten {q µ } zugeordneten kanonisch konjugierten Impulse.
Gemeinsam bilden die Ortskoordinaten und die konjugierten Impulse ein kanonisches Koordinatensystem ({q µ }, {pµ }) auf dem Phasenraum P. Jeder Bewegungszustand wird auf diese Weise eindeutig durch
eine Satz von 2 N reelle Zahlen festgelegt.
Ein kanonisches Koordinatensystem auf dem Phasenraum P eines mechanischen Systems
besteht aus den Ortskoordinaten {q µ } auf dem Konfigurationsraum Q und den konjugierten
Impulsen {pµ }, die die Komponenten eines dualen Vektors bilden.
Wenn wir zu einem anderen Koordinatensystem {q µ } auf dem Konfigurationsraum übergehen, so müssen
wir auch die Impulskomponenten {pµ } und die Hamilton-Funktion entsprechend transformieren. Verwenden wir die Notation aus Kapitel 13 und bezeichnen das “alte” Koordinatensystem mit {q (m)µ } und das
“neue” mit {q(n)ν }, so besteht zwischen den “alten” Impulsen {p(m)µ } und den “neuen” Impulsen {p(n)ν }
der Zusammenhang
∂q(n)ν
∂q(m)µ
p
⇔
p
=
p(n)ν .
(15.26)
p(n)ν =
(m)µ
(m)µ
∂q(n)ν
∂q(m)µ
Es treten die üblichen Übergangsmatrizen bei der Transformation eines dualen Vektors auf. Für die Zeitableitung der Koordinaten entlang einer Bahn gilt natürlich wieder die Kettenregel,
∂q(n)ν
∂q(m)µ
µ
µ
q̇(n)ν =
q̇
⇔
q̇
=
q̇(n)ν .
(15.27)
(m)
(m)
∂q(m)µ
∂q(n)ν
Daraus folgt, dass die Wirkung (15.20) in jedem Koordinatensystem durch den gleichen Ausdruck dargestellt wird. Wir können sie auch ganz koordinatenfrei in der Form
t2
Z
p(t) · q̇(t) − H q(t), p(t), t dt
(15.28)
S[q, p] =
t1
146
darstellen, um deutlich zu machen, dass der Integrand ein Skalar ist. Der Punkt bezeichnet wieder wie
üblich das Produkt eines dualen Vektors mit einem Vektor.
Aus dieser Überlegung folgt sofort, dass auch die Hamiltonschen Bewegungsgleichungen in jedem kanonischen Koordinatensystem die Form (15.25) annehmen. Denn sie ergeben sich aus der Forderung, dass
die Wirkung (15.28) für die physikalische Bahn stationär sein muss. Und wenn diese Wirkung, wie gerade
gezeigt, von der Wahl des Koordinatensystems unabhängig ist, dann sind es natürlich auch die Bewegungsgleichungen.
Genau wie die Lagrangeschen oder d’Alembertschen Bewegungsgleichungen beschreiben auch die Hamiltonschen Bewegungsgleichungen die Dynamik des Systems in einer “geometrischen” Sprache, die vom
Koordinatensystem unabhängig ist. Tatsächlich wird sich später herausstellen, dass wir sogar noch sehr
viel allgemeinere Koordinatentransformationen zulassen können als die hier betrachteten, unter denen die
Hamiltonschen Bewegungsgleichungen ihre Form beibehalten. In diesem Sinne ist die Hamiltonsche Formulierung der Bewegungsgleichen noch allgemeiner als die Lagrangesche Form.
Außerdem sind die Hamiltonschen Bewegungsgleichungen in ihrer Struktur sehr viel einfacher als die
Lagrangeschen Gleichungen. Es sind, wie wir bereits betont haben, Differenzialgleichungen erster Ordnung, die zudem schon nach den Ableitungen aufgelöst sind, während die Euler-Lagrange-Gleichungen
Differenzialgleichungen zweiter Ordnung sind, in denen die Zeitableitungen zudem noch etwas verschachtelt sind.
Es stellt sich daher die Frage, warum wir eigentlich nicht gleich diese Form der Bewegungsgleichungen
verwendet haben, um mechanische Systeme im allgemeinen zu beschreiben. Die Antwort ist recht einfach.
Es lassen sich nur ganz spezielle Systeme mit einer Hamilton-Funktion beschreiben. In der Herleitung
haben wir zwei Annahmen gemacht, die nicht für alle mechanischen Systeme erfüllt sind.
Zum einen sind wir davon ausgegangen, dass es überhaupt eine Lagrange-Funktion für das System gibt.
Es dürfen also keine Reibungs- oder anderen Kräfte auftreten, die sich nicht aus einer Lagrange-Funktion
ableiten lassen. Auch dürfen keine anholonomen Zwangsbedingungen vorliegen, die ja im wesentlichen
auch Reibungskräfte sind. Der Konfigurationsraum Q kann der reduzierte Konfigurationsraum eines Systems mit holonomen Zwangsbedingungen sein, aber es dürfen keine weiteren Einschränkungen an die
Bewegungsfreiheit vorliegen.
Zum anderen geht ganz entscheidend in die Herleitung ein, dass sich die Gleichung (15.13) nach der Geschwindigkeit v als Funktion von q und p auflösen lässt. Oder äquivalent dazu, das Extremum in (15.15)
muss existieren existiert und es muss eindeutig sein. Nur dann existiert überhaupt eine Hamilton-Funktion.
Systeme, die diese Bedingung erfüllen, heißen Hamiltonsche oder kanonische mechanische Systeme. Im
wesentlichen kann man sagen, dass alle mechanischen Systeme kanonisch sind, in denen keine Reibungskräfte und keine anholonomen Zwangsbedingungen auftreten.
Die zweite Forderung bedeutet für typische mechanische Systeme keine Einschränkung, solange die
kinetische Energie in der Geschwindigkeit quadratisch und positiv ist. Auf sie kann man im Prinzip sogar
verzichten, was auf eine verallgemeinerte Version der Hamiltonschen Mechanik führt. Darauf werden wir
allerdings nicht weiter eingehen. Wir gehen hier stets davon aus, dass der Konfigurationsraum Q der reduzierte Konfigurationsraum des Systems ist, also alle holonomen Zwangsbedingungen bereits eliminiert
wurden, und die Geschwindigkeit eine eindeutige Funktion des Impulses ist.
Aufgabe 15.6 Die Hamiltonschen Bewegungsgleichungen lassen sich auch ohne Umweg über das Variationsprinzip direkt aus den Lagrangeschen Bewegungsgleichungen herleiten. Man geht von den Gleichungen
d ∂L
∂L
=0
(15.29)
µ −
dt ∂ q̇
∂q µ
für die Koordinaten q µ (t) aus. Um dieses System von Differenzialgleichungen zweiter Ordnung in ein
System erster Ordnung zu verwandeln, führt man die kanonischen Impulse als Hilfsfunktionen ein, indem
147
man
pµ =
∂L
∂ q̇ µ
(15.30)
setzt. Die Hamilton-Funktion definiert man durch
H(q, p, t) = pµ q̇ µ − L(q, q̇, t),
(15.31)
wobei man für q̇ µ auf der rechten Seite die Lösung von (15.30) einsetzt, so dass die Geschwindigkeit eine
Funktion von Ort und Impuls wird. Man zeige, dass sich so auch die Hamiltonschen Bewegungsgleichungen (15.25) ergeben, und dass sie zu den Lagrangeschen Gleichungen äquivalent sind.
Aufgabe 15.7 Für welche mechanischen Systeme aus den Abbildungen in Kapitel 12 existiert eine
Hamilton-Funktion, für welche nicht? Man bestimme die Hamilton-Funktionen für diejenigen Systeme,
die dies zulassen, leite daraus die Bewegungsgleichungen ab und zeige, dass sie zu den Lagrangeschen
Bewegungsgleichungen äquivalent sind.
Einfache Beispiele
Wir beginnen mit dem einfachsten denkbaren mechanischen System, einem freien Teilchen im einer
Raumdimension. Es sei q die Ortskoordinate, v die Geschwindigkeit und p der Impuls. Dann ist
L(q, v) =
m 2
v
2
⇒
m p2
H(q, p) = Ext p v − v 2 =
.
v
2
2m
(15.32)
Daraus lassen sich unmittelbar die Hamiltonschen Bewegungsgleichungen ablesen. Sie lauten
q̇ =
p
∂H
= ,
∂p
m
ṗ = −
∂H
= 0.
∂q
(15.33)
Also ist p(t) = p0 konstant und q(t) = q0 + p0 t/m beschreibt eine gleichförmige Bewegung. Wir sehen
außerdem, dass H wieder die Energie des Teilchens ist, die in diesem Fall allein aus der kinetischen
Energie besteht.
Ein anderes, ebenfalls sehr einfaches Beispiel ist der harmonischer Oszillator. Er wird uns später noch
eine Weile verfolgen, denn an ihm lassen sich sehr viele wichtige Eigenschaften der Hamiltonschen Mechanik einfach und klar darstellen. Die Lagrange-Funktion ist in diesem Fall
L(q, v) =
m 2 κ 2
v − q .
2
2
(15.34)
Die es sich um eine Funktion der Form L = T − V handelt, und die kinetische Energie in der Geschwindigkeit quadratisch ist, ergibt sich die Hamilton-Funktion zu H = T + V. Allerdings müssen wir sie als
Funktion von q und p darstellen, wobei p = ∂L/∂v = m v wieder der gewöhnliche Impuls ist. Es gilt
daher
m
κ κ q2
p2
H(q, p) = Ext p v − v 2 + q 2 =
+
.
(15.35)
v
2
2
2m
2
Für die Hamiltonschen Bewegungsgleichungen ergibt sich
q̇ =
∂H
p
= ,
∂p
m
ṗ = −
∂H
= −κ q.
∂q
(15.36)
Die zweite Gleichung ist nichts anderes als die Newtonsche Bewegungsgleichung, wonach die Zeitableitung des Impulses die Kraft ist, und diese wiederum als Ableitung des Potenzials gegeben ist. Und die
148
erste Gleichung ist eigentlich redundant, da sie nur noch einmal die bereits bekannte Beziehung zwischen
Impuls und Geschwindigkeit herstellt.
Wir sehen also, dass wir immer noch “dieselbe Mechanik” betreiben. Nur unsere Begriffe haben sich
etwas verändert. Die Lösungen der Bewegungsgleichungen sind natürlich immer noch die gleichen. Die
allgemeinen Lösungen von (15.36) lassen sich sofort angeben. Es gilt
q(t) = a sin(ω t + ϕ),
p(t) = m ω a cos(ω t + ϕ),
(15.37)
wobei a und ϕ Integrationskonstanten sind, die durch die Anfangsbedingung festgelegt werden, und ω 2 =
κ/m die Eigenfrequenz des Oszillators ist.
Um die Dynamik eines ebenen Pendels zu beschreiben, können wir ganz ähnlich vorgehen. Wir benutzen als Ortskoordinate q die Auslenkung des Pendels, also die Stecke, die das Pendel vom Ruhepunkt aus
zurückgelegt hat. Da sich ein Pendel auf einem Kreis bewegt, ist dies eine periodische Koordinate. Bei
einer Pendellänge ` gilt q ≡ q + 2π `. Der Konfigurationsraum ist die Mannigfaltigkeit Q = S 1 , also eine
eindimensionale Sphäre.
Wie sieht dann der Phasenraum aus? Da der Konfigurationsraum eindimensional ist, ist sein Kotangentenraum an jeder Stelle q ∈ Q ein eindimensionaler Vektorraum Tq∗ Q. Der Impuls wird folglich durch
eine reelle Zahl p dargestellt. Der Phasenraum ist die Vereinigung aller dieser Vektorräume, also das Kotangentenbündel T∗ (S1 ). Wenn wir an jeden Punkt auf der Kreislinie einen eindimensionalen Vektorraum
anheften, so bekommen wir einen Zylinder. Der Phasenraum eines Pendels ist folglich ein Zylinder. Die
Ortskoordinate q ist periodisch, und der konjugierte Impuls p dient als zweite, nicht periodisch Koordinate.
Um die Hamilton-Funktion zu bestimmen, gehen wir wieder von der Lagrange-Funktion aus. Die kinetische Energie ist weiterhin T = m v 2 /2, wobei v = q̇ die Zeitableitung der Auslenkung ist. Für die
potenzielle Energie müssen wir V = −m g ` cos(q/`) setzen, wenn der Ruhepunkt bei q = 0 liegen soll.
Dann ist L = T − V, und T ist in v quadratisch. Also gilt H = T + V. Um die kinetische Energie als
Funktion des Impulses p darzustellen, benötigen wir nur noch die übliche Beziehung p = ∂L/∂v = m v.
Wir bekommen dann die Hamilton-Funktion
p2
p2
m g q2
− m g ` cos(q/`) ≈
+
− m g.
(15.38)
2m
2m
2`
Bis auf eine Konstante, die sich auf die Bewegungsgleichungen nicht auswirkt, stimmt sie für kleine
Auslenkungen näherungsweise mit der Hamilton-Funktion eines harmonischen Oszillators überein. Wir
müssen nur für die Federkonstante κ = m g/` setzen, so dass sich für die Eigenfrequenz der bekannte
Ausdruck ω 2 = κ/m = g/` ergibt. Die Bewegungsgleichungen lauten schließlich
H(q, p) =
q̇ =
∂H
p
= ,
∂p
m
ṗ = −
∂H
mgq
= −m g sin(q/`) ≈ −
.
∂q
`
(15.39)
Aufgabe 15.8 Wie sieht die Hamilton-Funktion für das Pendel aus, wenn man als Ortskoordinate statt der
Auslenkung q den Auslenkwinkel ϑ = q/` verwendet? Was ist dann der konjugierte Impuls, und welche
Bewegungsgleichungen ergeben sich?
Koordinatentransformationen
Als nächstes betrachten wir ein System mit zwei Freiheitsgraden, um zu zeigen, was bei einer Koordinatentransformation geschieht, und wie sich dabei die Hamiltonschen Bewegungsgleichungen transformieren.
Das einfachste System mit zwei Freiheitsgraden ist ein Teilchen in einer Ebene. Es soll sich dort in einem
zeitunabhängigen Potenzial bewegen, für das wir der Einfachheit halber wieder das eines harmonischen
Oszillators einsetzen. Ist (x, y) ein kartesischen Koordinatensystem in der Ebene, so ist die LagrangeFunktion
κ 2
m
(v x )2 + (v y )2 −
x + y 2 ).
(15.40)
L(x, y, v x , v y ) =
2
2
149
Der Zusammenhang zwischen den Geschwindigkeiten (vx , vy ) und den konjugierten Impulsen (px , py ) ist
wieder der übliche,
∂L
∂L
px = x = m v x ,
py = y = m v y .
(15.41)
∂v
∂v
Da die Lagrange-Funktion wieder von der Form L = T − V ist, und T eine quadratische Funktion der
Geschwindigkeiten ist, gilt für die Hamilton-Funktion H = T + V, wobei wir die kinetische Energie als
Funktion der Impulse schreiben müssen. Das ergibt
py 2
κ x2 κ y 2
px 2
+
+
+
.
H(x, y, px , py ) =
2m 2m
2
2
(15.42)
Die Hamiltonschen Bewegungsgleichungen lauten
ẋ =
px
∂H
= ,
∂px
m
ẏ =
∂H
py
= ,
∂py
m
ṗx = −
∂H
= −κ x,
∂x
ṗy = −
∂H
= −κ y.
∂y
(15.43)
Es handelt sich einfach um zwei voneinander unabhängige harmonische Oszillatoren mit der Eigenfrequenz ω 2 = κ/m. Dass die Bewegungen in die beiden Richtungen unabhängig ablaufen, ergibt sich auch
daraus, dass die Lagrange-Funktion als Summe von zwei Funktionen dargestellt werden kann, wobei die
eine nur von x und v x , die andere nur von y und v y abhängt. Offenbar gilt in diesem Fall dasselbe für die
Hamilton-Funktion, die ebenfalls eine Summe von zwei Funktionen ist. Hier hängt der eine Summand nur
von x und px ab,. der andere nur von y und py .
Aufgabe 15.9 Man finde die allgemeine Lösung von (15.43). Welche spezielle Lösung ergibt sich für die
Anfangsbedingungen x(0) = a, y(0) = 0, px (0) = 0, py (0) = b?
Nun wollen wir dieselben Bewegungsgleichungen in einem anderen Koordinatensystem darstellen. Der
Konfigurationsraum Q des Teilchens ist eine Euklidische Ebene. Wie führen dort ein Polarkoordinatensystem (r, ϕ) ein, so dass wie üblich x = r cos ϕ und y = r sin ϕ gilt. Es gibt dann mehrere Stellen in
der gerade durchgeführten Herleitung, an der wir diese Koordinatentransformation einsetzen können. Wir
können zum Beispiel ganz von vorne beginnen, und zuerst die Lagrange-Funktion umrechnen. Das ergibt
L(r, ϕ, v r , v ϕ ) =
κ
m
(v r )2 + r 2 (v ϕ )2 − r 2 ,
2
2
(15.44)
wobei (v r , v ϕ ) die Komponenten der Geschwindigkeit in Polarkoordinaten sind, also die radiale und die
Winkelgeschwindigkeit. Diesen Ausdruck für die Lagrange-Funktion hatten wir schon mehrmals benutzt,
so dass wir ihn hier nicht mehr herleiten müssen. Die konjugierten Impulse sind nun
pr =
∂L
= m vr ,
∂v r
pϕ =
∂L
= m r2 v ϕ.
∂v ϕ
(15.45)
Der zur Koordinate r kanonisch konjugierte Impuls pr ist die Komponente des Impulses in radiale Richtung, und der zur Koordinate ϕ kanonisch konjugierte Impuls p ϕ ist der Drehimpuls, oder genauer dessen
z-Komponente, wenn wir uns die Ebene im Raum eingebettet denken. Da weiterhin L = T − V ist, gilt
für die Hamiltonfunktion auch hier H = T + V, also
pϕ2
κ r2
pr2
+
+
.
H(r, ϕ, pr , pϕ ) =
2 m 2 m r2
2
(15.46)
Eine andere Möglichkeit, sich diese Hamilton-Funktion zu verschaffen, geht direkt von der Darstellung
(15.42) aus. Der Phasenraum P des Teilchens ist ein vierdimensionaler Raum, auf dem durch (x, y, p x , py )
150
ein kanonisches Koordinatensystem definiert wird. Nun führen wir eine Koordinatentransformation durch,
indem wir
x = r cos ϕ,
y = r sin ϕ
(15.47)
setzen. Dann müssen wir auch die Impulse transformieren, und zwar wie die Komponenten eines dualen
Vektors,
∂y
∂x
px +
py = cos ϕ px + sin ϕ py ,
pr =
∂r
∂r
∂y
∂x
px +
py = −r sin ϕ px + r cos ϕ py .
(15.48)
pϕ =
∂ϕ
∂ϕ
Die neuen Koordinaten (r, ϕ, pr , pϕ ) bilden dann ebenfalls ein kanonisches Koordinatensystem auf P.
Um die Hamilton-Funktion in diesen Koordinaten darzustellen, müssen wir nur die Beziehungen (15.47)
und (15.48) in (15.42) einsetzen. Das Ergebnis ist natürlich wieder (15.46). Wir müssen also nur dieselbe
Funktion H in den neuen Koordinaten darstellen.
Die Bewegungsgleichungen können wir nun ebenso gut in diesem Koordinatensystem bestimmen. Es
gilt
ṙ =
∂H
pr
= ,
∂pr
m
ϕ̇ =
pϕ
∂H
=
,
∂pϕ
m r2
ṗr = −
pϕ2
∂H
=
− κ r,
∂r
m r3
ṗϕ = −
∂H
= 0.
∂ϕ
(15.49)
In der Bewegungsgleichung für pr tritt nun ein effektives Potenzial auf, das wir auch schon aus anderen
Herleitungen von Bewegungsgleichungen in Polarkoordinaten kennen.
Man kann sich leicht davon überzeugen, dass diese Bewegungsgleichungen zu (15.43) äquivalent sind.
Sie sind zwar nun miteinander gekoppelt. Wir sehen daher nicht mehr sofort, dass die es sich um zwei
unabhängige Oszillatoren handelt. Aber wir können statt dessen aus der letzten Gleichung sofort ablesen,
dass der Drehimpuls pϕ eine Erhaltungsgröße ist. Damit lässt sich auch dieses Gleichungssystem leicht
auflösen.
Aufgabe 15.10 Man finde die allgemeine Lösung von (15.49). Wie stellt sich die Anfangsbedingung aus
Aufgabe 15.9 in Polarkoordinaten dar, und welche spezielle L ösung ergibt sich daraus?
Aufgabe 15.11 Für ein N -Teilchen-System im dreidimensionalen Euklidischen Raum bezeichnen wir die
Orte der Teilchen wie üblich mit rα , α ∈ {1, . . . , N }, und ihre Koordinaten mit rα,i , i ∈ {x, y, z}. Entsprechend sind vα bzw. vα,i die Geschwindigkeiten. Liegt eine paarweise, nur vom Abstand abh ängige
Wechselwirkung der Teilchen vor, so hat die Lagrange-Funktion die Form
1X
1X
mα vα2 −
Vα,β (|rα − rβ |)
L {rα }, {vα } =
2 α
2
(15.50)
α6=β
Die kanonischen Impulse werden mit pα , bzw. ihre Komponenten mit pα,i bezeichnet. Man bestimme die
Beziehungen zwischen den Impulsen und den Geschwindigkeiten, die Hamilton-Funktion H({r α }, {pα }),
und die daraus resultierenden Bewegungsgleichungen.
Aufgabe 15.12 Ein Teilchen im dreidimensionalen Raum bewege sich in einem kugelsymmetrischen Potenzial V = V (r). Die Lagrange-Funktion in Kugelkoordinaten ist folglich
L(r, ϑ, ϕ, v r , v ϑ , v ϕ ) =
m
(v r )2 + r 2 (v ϑ )2 + r 2 sin2 ϑ (v ϕ )2 − V (r).
2
Welche Hamilton-Funktion H(r, ϑ, ϕ, pr , pϑ , pϕ ) ergibt sich daraus?
151
(15.51)
Zeitabhängige Systeme
Um zu zeigen, dass die Hamiltonsche Methode auch dann noch funktioniert, wenn die Lagrange-Funktion,
und damit auf die Hamilton-Funktion explizit zeitabhängig ist, betrachten wir als drittes Beispiel ein ebenes Pendel mit veränderlicher Länge. Es handelt sich um ein System mit holonomen, aber zeitabhängigen
Zwangsbedingungen. Wir verwenden als reduzierte Koordinate eine Winkelkoordinate ϑ, so dass sich das
Pendel in der x-z-Ebene an der Stelle x = ` sin ϑ und z = −` cos ϑ befindet, wobei die Pendellänge
` = `(t) als Funktion der Zeit vorgegeben ist.
Die Lagrange-Funktion bestimmen wir wie üblich, indem wir die kinetische und potenzielle Energie
berechnen. Das ergibt
m
m
m 2
ẋ + ż 2 = `2 ϑ̇2 + `˙2 ,
T =
2
2
2
V = m g z = −m g ` cos ϕ.
(15.52)
Bezeichnen wir die Winkelgeschwindigkeit ϑ̇ mit ω, so ist
L(ϑ, ω, t) =
˙ 2
m `(t)2 2 m `(t)
ω +
+ m g `(t) cos ϑ.
2
2
(15.53)
˙ hängt die Lagrange-Funktion also explizit
Über die vorgegebene Funktion `(t) und deren Ableitung `(t)
von der Zeit ab. Um die Hamilton-Funktion zu finden, bestimmen wir erst den Zusammenhang zwischen
der Winkelgeschwindigkeit ω und dem zugehörigen Impuls, von dem wir ja bereits wissen, dass es der
Drehimpuls ist. Wir bezeichnen ihn daher mit
l=
∂L
= m `(t)2 ω.
∂ω
(15.54)
Der Zusammenhang zwischen ω und l ist ebenfalls explizit von der Zeit abhängig. Das ändert aber nichts
an der Definition der Hamilton-Funktion die sich aus (15.15) ergibt. Es gilt
˙ 2
l2
m `(t)
H(ϑ, l, t) = Ext l ω − L(ϑ, ω, t) =
−
− m g `(t) cos ϑ,
ω
2
2 m `(t)2
(15.55)
wobei wir das Extremum gefunden haben, indem wir für ω die Lösung der Gleichung (15.54) eingesetzt
haben.
˙ explizit von der Zeit ab. Außerdem können
Auch die Hamilton-Funktion hängt nun über `(t) und `(t)
wir noch die folgende wichtige Feststellung machen. Sie ist nicht von der Form H = T + V, denn der
˙ 2 proportional ist, hat das falsche Vorzeichen. Das liegt daran, dass dieser Term in der
Term, der zu `(t)
Lagrange-Funktion (15.53) einen Anteil der kinetischen Energie repräsentiert, aber keine quadratische
Funktion der Geschwindigkeit ω ist.
In diesem Sinne ist H nicht die Größe, die wir üblicherweise als Gesamtenergie bezeichnen würden. Das
steht ein wenig mit der Definition im Widerspruch, die wir weiter oben für die physikalische Interpretation
von H gegebenen haben. Die Hamilton-Funktion liefert hier einen anderen Ausdruck für die Gesamtenergie des Systems als die Summe aus potenzieller und kinetischer Energie. Waren wir also zu voreilig, als
wir die Hamilton-Funktion als eine Verallgemeinerung des Begriffes “Energie” definiert haben? Was ist
hier die “richtige” Definition von Energie?
Wir müssen uns entweder für die “physikalisch intuitive” Definition E = T + V entscheiden, oder für
die “formale” Definition E = H. Im Grunde ist es aber völlig egal, welche Größe wir in diesem Fall
Energie nennen. Wir können mit ihr nämlich gar nichts weiter anfangen. Da es sich um ein System mit
zeitabhängigen Zwangsbedingungen handelt, leisten diese Arbeit am System, so dass die Energie, wie
152
auch immer definiert, keine Erhaltungsgröße ist. Wir können sie nicht wie sonst üblich zur Lösung der
Bewegungsgleichungen verwenden.
Aus diesem Grund können wir gut mit dem Umstand zurecht kommen, dass die Energie eines Systems,
die sich aus der Hamilton-Funktion ergibt, nicht immer mit dem übereinstimmt, was wir uns intuitiv unter
Energie vorstellen. Wichtiger als die Frage, welche Größe wir Energie nennen, ist die Frage nach Erhaltungsgrößen, die uns helfen, die Bewegungsgleichungen zu lösen. Damit werden wir uns gleich näher
befassen und sehen, dass es stets die Hamilton-Funktion, also die formale Definition der Energie ist, die
zu einer solchen Erhaltungsgröße führt.
Unabhängig von der Frage nach der Bedeutung des Begriffes Energie können wir jedoch aus (15.38)
die Bewegungsgleichungen ableiten. Da ϑ nun die Ortskoordinate und l der kanonisch konjugierte Impuls
ist, bekommen wir
∂H
l
∂H
ϑ̇ =
=
l˙ = −
= −m g `(t) sin ϑ.
(15.56)
2,
∂l
∂ϑ
m `(t)
Der fragliche Term mit dem falschen Vorzeichen geht in die Bewegungsgleichungen gar nicht ein, da
er weder von ϑ noch von l abhängt. Wie immer ergibt sich ein Satz von Differenzialgleichungen erster
˙
Ordnung, aufgelöst nach den Ableitungen ϑ̇(t) und l(t).
Das einzig neue ist, dass nun die Koeffizienten
dieser Gleichungen explizit von t abhängen, über die vorgegebene Funktion `(t).
Aufgabe 15.13 Man löse die Bewegungsgleichungen (15.56) des Pendels für g = 0, also im schwerelosen
Raum.
Der Hamiltonsche Fluss
Wir wollen uns nun die Hamiltonschen Bewegungsgleichungen (15.25) etwas genauer ansehen. Wie bereits erwähnt, wird durch die Vorgabe eines Anfangszustandes q(0) = q 0 und p(0) = p0 die Zeitentwicklung des Systems eindeutig festgelegt. Wir kennen also die Funktionen q(t) und p(t), sobald wir ihre
Werte zu einem bestimmten Zeitpunkt, zum Beispiel t = 0, kennen.
Eine Kurve (q(t), p(t)) im Phasenraum, die auf diese Weise bestimmt wird, nennt man eine Trajektorie.
Eine Trajektorie im Phasenraum ist das Analogon zu einer Bahn q(t) im Konfigurationsraum. Beide beschreiben die zeitliche Entwicklung des Systems als parametrisierte Kurve. Während die Bahn jedoch zu
jedem Zeitpunkt nur den Ort des Systems im Konfigurationsraum festlegt, können wir auf der Trajektorie
im Phasenraum gleichzeitig den Ort und den Impuls ablesen.
Eine Trajektorie ist eine Bahn (q(t), p(t)) im Phasenraum, die den Hamiltonschen Bewegungsgleichungen genügt.
Für zwei sehr einfache mechanische Systeme sind in Abbildung 15.1 ein paar Trajektorien dargestellt. Die
Abbildung (a) zeigt den Phasenraum eines harmonischen Oszillators, aufgespannt durch die kanonischen
Koordinaten (q, p). Wir wählen als Anfangszustand einen Punkt auf der positiven p-Achse. Das System
soll sich zum Zeitpunkt t = 0 am Ruhepunkt q0 = 0 befinden und einen Impuls p0 > 0 haben. Die
zugehörige Lösung entnehmen wir aus (15.37),
q(t) = a0 sin(ω t),
p(t) = p0 cos(ω t),
mit a0 =
p0
.
mω
(15.57)
Im Phasenraum ergibt sich eine Ellipse mit den Halbachsen p0 und a0 , wobei p0 der Anfangsimpuls und
a0 die daraus resultierende Amplitude der Schwingung ist. Der Oszillator schlägt zuerst in die positive qRichtung aus, so dass die Ellipse im Uhrzeigersinn durchlaufen wird, wenn man die Darstellung so wie in
der Abbildung wählt, also q nach rechts und p nach oben aufträgt. Für einige ausgewählte Werte von p 0 sind
die entsprechenden Trajektorien, jeweils für ein bestimmtes Zeitintervall 0 ≤ t ≤ τ , in Abbildung 15.1(a)
eingezeichnet.
153
p
p
replacements
q
q
(a)
(b)
(c)
(d)
Abbildung 15.1: Der Hamiltonsche Fluss eines harmonischen Oszillators (a) und eines Pendels (b). Die
Trajektorien des harmonischen Oszillators sind Ellipsen, die alle mit der gleichen Kreisfrequenz ω durchlaufen werden. Beim Pendel gibt es oszillierende und sich überschlagende Trajektorien. Die gestrichelten
Linien sind die Niveaulinien der Hamilton-Funktion.
Die Trajektorien im Phasenraum haben zwei wichtige Eigenschaften. Die erste beruht auf der Tatsache,
dass die Hamilton-Funktion in diesem Fall nicht explizit von der Zeit abhängt. Damit hängen auch die
Bewegungsgleichungen nicht explizit von der Zeit ab. Folglich ist mit t 7→ (q(t), p(t)) auch jede in der
Zeit verschobene Kurve t 7→ (q(t − t0 ), q(t − t0 )) eine Trajektorie. Es spielt keine Rolle, zu welchem
Zeitpunkt wir das System in den gegeben Anfangszustand versetzen. Es wird immer die gleiche Trajektorie
durchlaufen, nur eben zu einer früheren oder späteren Zeit.
Die zweite Eigenschaft ergibt sich aus der Tatsache, dass die Bewegungsgleichungen die Zeitentwicklung eindeutig festlegen. Daher geht durch jeden Punkt im Phasenraum genau eine Trajektorie. Die Trajektorien bilden eine Schar von Kurven, die den Phasenraum vollständig ausfüllen, sich dabei aber niemals
schneiden. Denn durch den Schnittpunkt würden dann mehrere Trajektorien verlaufen.
Beim harmonischen Oszillator können wir uns das recht einfach klar machen. Egal, welchen Anfangszustand wir vorgeben, das System kehrt immer nach einer Periode T = 2π/ω in diesen Zustand zurück.
Die Trajektorien sind geschlossen Kurven, die alle die gleiche Periode T haben. Es sind Ellipsen, die
den Ursprung, also den Ruhepunkt des Oszillators bei q = 0 und p = 0 im Uhrzeigersinn umlaufen. Es
gibt nur eine spezielle, “entartete” Trajektorie, die nur aus einem Punkt besteht. Sie beschreibt den in der
Gleichgewichtslage ruhenden Oszillator.
Ein etwas anderes Bild ergibt sich, wenn wir statt eines harmonischen Oszillators ein ebenes Pendel
betrachten. Wie wir bereits gezeigt haben, ist der Phasenraum in diesem Fall ein Zylinder. Die Pendellänge
sei wieder `. Als kanonische Koordinaten verwenden wir die periodische Ortskoordinate q ≡ q + 2π `, also
die Auslenkung, und den konjugierten Impuls p. Die Hamilton-Funktion nimmt dann die Form (15.38) an.
In Abbildung 15.1(b) ist dieser Phasenraum grafisch dargestellt. Wir müssen uns die Abbildung zu einem
Zylinder aufgerollt denken, so dass die gestrichelte Linie am rechten Rand bei q = π ` mit der am linken
Rand bei q = −π ` identifiziert wird.
Als Anfangszustand wählen wir wieder einen Punkt auf der positiven p-Achse. Natürlich gilt auch hier,
dass von jedem Punkt genau eine Trajektorie ausgeht, die wir durch Lösen der Bewegungsgleichen (15.39)
berechnen können. Wohin diese Trajektorie läuft, hängt nun jedoch vom Wert des Anfangsimpulses ab. Für
kleine Impulse oszilliert das Pendel um die Ruhelage und verhält sich dabei näherungsweise wie der har154
monische Oszillator. In der Nähe des Koordinatenursprungs ergibt sich in den Abbildungen 15.1(a) und (b)
ein sehr ähnliches Bild. Jede Trajektorie kehrt nach einer gewissen Zeit, die für kleine Auslenkungen der
Eigenperiode T = 2π/ω entspricht, in den Ausgangszustand zurück.
Für große Impulse überschlägt sich das Pendel. Es kehrt dann auch nach einer gewissen Zeit zum Anfangszustand zurück, jedoch wickelt sich die Trajektorie dabei um den Zylinder, statt den Koordinatenursprung zu umrunden. Als Grenzfall zwischen diesen beiden Klassen von Trajektorien gibt es die Kriechbahn, bei der das Pendel nach unendlicher langer Zeit den oberen, instabilen Gleichgewichtspunkt erreicht.
Diese spezielle Lösung der Bewegungsgleichungen wurde bereits in Aufgabe 5.16 diskutiert. Schließlich
gibt es noch zwei spezielle Trajektorien, die jeweils nur aus einem Punkt bestehen, nämlich die stabile
Gleichgewichtslage bei q = 0 und p = 0, sowie die instabile Gleichgewichtslage bei q = ±π ` und p = 0.
Wir werden nun dieses Verhalten von Trajektorien im Phasenraum etwas allgemeiner beschreiben. Der
Einfachheit halber nehmen wir dazu an, dass die Hamilton-Funktion, so wie in den beiden gerade diskutierten Beispielen, nicht explizit von der Zeit abhängt. Dann können wir wie folgt eine Abbildung des
Phasenraumes auf sich selbst definieren. Wir geben irgendeinen Anfangszustand (q 0 , p0 ) vor. Wir versetzen das System in diesen Zustand und warten eine Zeitspanne τ . Dann ist das System in einem Zustand
(qτ , pτ ). Für jedes τ wird auf dieser Weise eine Abbildung
χH (τ ) :
P → P,
(q0 , p0 ) 7→ (qτ , pτ ).
(15.58)
definiert. Man nennt diese Schar von Abbildung den Hamiltonschen Fluss. Er gibt für jedes τ ∈ R an,
wie sich das System innerhalb einer Zeitspanne τ entwickelt. Jedem Anfangszustand wird ein Endzustand
zugeordnet.
Der Hamiltonsche Fluss ist für jedes τ ∈ R eine bijektive Abbildung des Phasenraumes auf sich selbst.
Das ergibt sich aus der Tatsache, dass wir die Bewegungsgleichungen natürlich auch benutzen können,
um die Trajektorie in die Vergangenheit fortzusetzen. Da die Bewegungsgleichungen nicht explizit von
der Zeit abhängen sollen, gilt sogar ganz allgemein die Beziehung
χH (τ1 ) ◦ χH (τ2 ) = χH (τ1 + τ2 ).
(15.59)
Wenn sich das System erst über eine Zeitspanne τ1 entwickelt und dann über eine Zeitspanne τ2 , dann ist
das Ergebnis das gleiche als würde es sich gleich über eine Zeitspanne τ 1 + τ2 entwickeln.
Setzen wir in (15.59) τ2 = 0, so ergibt sich χH (0) = id, was auch anschaulich klar ist. Wenn wir
dem System gar keine Zeit geben, sich zu entwickeln, so ist der Endzustand gleich dem Anfangszustand.
Setzen wir schließlich τ1 = τ und τ2 = −τ , so finden wir χH (τ )−1 = χH (−τ ). Die inverse Abbildung
bekommen wir, indem wir das System in die jeweils umgekehrte Zeitrichtung entwickeln lassen.
Eine Schar von bijektiven Abbildungen eines Raumes auch sich selbst, die durch eine reelle Zahl parametrisiert werden, und die zudem die Eigenschaft (15.59) haben, nennt man im allgemeinen einen Fluss.
Dahinter steckt die anschauliche Vorstellung von einer strömenden Flüssigkeit. Verfolgt man die einzelnen
Teilchen in einer strömenden Flüssigkeit über ein bestimmte Zeitspanne, so wird auch dadurch eine Abbildung des Raumes, in dem die Strömung stattfindet, auf sich selbst definiert. Wenn die Strömung station är
ist, als zeitunabhängig, so gilt für diese Abbildungen die Gleichung (15.59).
Wir können uns den Hamiltonschen Fluss im Phasenraum, also die Zeitentwicklung eines mechanischen
Systems, in diesem Sinne wie die Strömung einer Flüssigkeit vorstellen. Die in Abbildung 15.1 gezeigten
Trajektorien ergeben sich, wenn man einzelne Teilchen in dieser Flüssigkeit markiert und dann ihren Weg
verfolgt.
Die Zeitentwicklung eines mechanischen System wird durch einen Fluss im Phasenraum beschrieben.
155
Beim harmonischen Oszillator bildet der Fluss einen einzigen großen Wirbel um den Koordinatenursprung. Alles strömt gleichmäßig auf elliptischen Kurven. Wir können den Fluss sogar relativ leicht explizit angeben. Gibt man als Anfangszustand (q0 , p0 ) vor, so ist die eindeutige Lösung der Bewegungsgleichung
q(t) = q0 cos(ω t) +
p0
sin(ω t),
mω
p(t) = p0 cos(ω t) − m ω q0 sin(ω t).
Die Abbildung (15.58) sieht also explizit wie folgt aus,
p
χH (τ ) : (q, p) 7→
q cos(ω τ ) +
sin(ω τ ) , p cos(ω t) − m ω q sin(ω t) .
mω
(15.60)
(15.61)
Man kann sich leicht davon überzeugen, dass diese Schar von Abbildungen die Eigenschaft (15.59) hat.
Beim Pendel sieht der Fluss ein wenig komplizierter aus und lässt sich nicht mehr in geschlossener Form
angeben. Wir können aber weiterhin das Bild einer strömenden Flüssigkeit verwenden. Auf dem zylinderförmigen Phasenraum, der in Abbildung 15.1(b) dargestellt ist, verläuft die Strömung im oberen Bereich nach rechts um den Zylinder herum, und im unteren Bereich nach links um den Zylinder herum.
Dies entspricht dem Pendel, das sich entweder rechts- oder linksrum überschlägt. In der Mitte um den
Koordinatenursprung bildet sich ein Wirbel, in dem das Pendel um die Ruhelage oszilliert.
Aufgabe 15.14 Wie sieht der Hamiltonsche Fluss für ein freies Teilchen im dreidimensionalen Raum aus?
Aufgabe 15.15 Kann man den Hamiltonschen Fluss auch dann noch definieren, wenn die HamiltonFunktion explizit von der Zeit abhängt?
Die Poisson-Klammer
Wir werden von nun an stets die Annahme machen, dass die Hamilton-Funktion nicht explizit von der Zeit
abhängt. Wir betrachten also nur solche mechanischen Systeme, die nicht “von außen” über zeitabhängige
Zwangsbedingungen gesteuert werden. Über solche autonomen Systeme macht die Hamiltonsche Formulierung der Bewegungsgleichungen einige sehr interessante Aussagen. Zwar lassen sich viele dieser
Aussagen verallgemeinern, so dass sie auch für Systeme mit zeitabhängiger Dynamik gelten. Dies führt
aber nicht zu sehr viel tieferen Erkenntnissen.
Eine der wichtigsten Eigenschaften der Hamiltonschen Mechanik ist, dass sie eine sehr elegante Antwort
auf die Frage gibt, ob ein System Erhaltungsgrößen besitzt und welche Größen das gegebenenfalls sind.
Unter einer Erhaltungsgröße verstehen wir dabei eine Funktion des Bewegungszustands, deren Wert sich
zeitlich nicht ändert. Beispiele für solche Größen kennen wir bereits aus der Newtonschen Mechanik
von Punktteilchen, etwa den Gesamtimpuls oder den Gesamtdrehimpuls eines N -Teilchen-System. Diese
Größen sind zeitlich konstant, wenn die Wechselwirkungen zwischen Teilchen bestimmte Eigenschaften
haben. Diesen Zusammenhang wollen wir nun systematisch untersuchen.
In der Hamiltonschen Formulierung ist der Bewegungszustand ein Paar (q, p), also ein Punkt im Phasenraum P. Folglich wird eine Erhaltungsgröße durch eine Phasenraumfunktion A : P → R dargestellt, die
jedem Bewegungszustand (q, p) eine reelle Zahl A(q, p) zuordnet. Als Beispiel für eine Phasenraumfunktion kennen wir bereits die Hamilton-Funktion H. Wenn sie nicht explizit von der Zeit abhängt, handelt es
sich um eine Abbildung H : P → R. Wir kennen auch schon ihre physikalische Interpretation. Es ist die
Gesamtenergie des Systems.
Wir wollen uns nun ganz allgemein fragen, wie sich der Wert einer Phasenraumfunktion mit der Zeit
ändert, wenn das System sich gemäß seinen Bewegungsgleichungen entwickelt. Dazu müssen wir den
Wert der Funktion A entlang einer Trajektorie (q(t), p(t)) auswerten. Das ergibt eine Funktion A(t) =
156
A(q(t), p(t)). Sie beschreibt die zeitliche Entwicklung der Größe A aus der Sicht des Systems, das sich
entlang der Trajektorie bewegt. Für die Ableitung dieser Größe nach der Zeit gilt
Ȧ =
∂A
∂A
dA
= q̇ µ µ + ṗµ
.
dt
∂q
∂pµ
(15.62)
Wie üblich steht der Punkt bzw. d/dt für die totale Zeitableitung, also die Ableitung der Funktion
t 7→ H(q(t), p(t)), während mit ∂/∂q µ bzw. ∂/∂pµ die partiellen Ableitungen nach den Phasenraumkoordinaten bezeichnet werden, die in diesem Fall selbst wieder Funktionen der Zeit sind.
Nun setzen wir in (15.62) die Hamiltonschen Bewegungsgleichungen ein. Das ergibt
dA
∂H ∂A
∂H ∂A
=
.
µ −
dt
∂pµ ∂q
∂q µ ∂pµ
(15.63)
Wenn man sich den Ausdruck auf der rechten Seite genauer anschaut, stellt man fest, dass es sich wieder
um eine Phasenraumfunktion handelt. Sie wird in einer speziellen Art und Weise aus den partiellen Ableitungen von A und H gebildet. Während auf der linken Seite die Ableitung entlang einer Trajektorie steht,
steht also auf der rechten Seite wieder eine Phasenraumfunktion.
Das hat folgenden einfachen Grund. Wenn wir wissen, in welchem Bewegungszustand sich das System
zu einem Zeitpunkt befindet, dann wissen wir auch, in welche Richtung es sich von dort aus im Phasenraum
bewegen wird. Folglich wissen wir auch, wie sich eine gegebene Funktion A(q, p) zeitlich entwickeln
wird, ohne die Trajektorie selbst kennen zu müssen.
Wir können nun ein sehr einfaches Kriterium dafür angeben, wann eine Phasenraumfunktion eine Erhaltungsgröße ist, ohne dass wir uns dazu die Bewegungsgleichungen näher anschauen müssen. Eine Funktion
A(q, p) ist genau dann eine Erhaltungsgröße, wenn
∂H ∂A
∂H ∂A
=0
µ −
∂pµ ∂q
∂q µ ∂pµ
(15.64)
ist. Da solche Ausdrücke im folgenden öfters auftreten, ist es nützlich, dafür eine spezielle Schreibweise
einzuführen. Es seien A, B : P → R zwei Phasenraumfunktionen. Dann ordnen wir ihnen eine dritte
Phasenraumfunktion C : P → R zu, die wie folgt definiert ist
PoissonKlammer
C = {A, B} =
∂A ∂B
∂A ∂B
µ −
∂pµ ∂q
∂q µ ∂pµ
(15.65)
Die Funktion C heißt Poisson-Klammer von A und B. Man bezeichnet sie üblicherweise mit einer geschweiften Klammer, in die man die beiden Funktionen A und B als Argumente einträgt.
Die Poisson-Klammer ordnet jedem Paar von Phasenraumfunktionen A und B eine neue
Phasenraumfunktion {A, B} zu.
Mit Hilfe dieser Notation können wir für die Zeitentwicklung einer beliebigen Phasenraumfunktion ganz
einfach als
Ȧ = {H, A}
(15.66)
schreiben. Zu beachten ist hierbei nur, dass die Gleichung erst dann sinnvoll zu interpretieren ist, wenn
wir sowohl die Phasenraumfunktion A links als auch Phasenraumfunktion {H, A} rechts entlang einer
Trajektorie auswerten. Denn erst dann ist der Punkt, also die totale Zeitableitung, ein sinnvolle Operation.
Nehmen wir nun an, die Phasenraumfunktion A sei eine Erhaltungsgröße. Dann gilt auf jeder Trajektorie
Ȧ = 0. Folglich hat auf die Funktion auf der rechten Seite von (15.66) auf jeder Trajektorie den Wert Null.
157
Da durch jeden Punkt im Phasenraum genau eine Trajektorie geht, verschwindet also die Funktion {H, A}
identisch.
Umgekehrt, wenn die Phasenraumfunktion {H, A} identisch verschwindet, dann folgt aus (15.66), dass
auf jeder Trajektorie Ȧ = 0 ist, also ist A eine Erhaltungsgröße. Wir haben damit den folgenden Satz
bewiesen:
Eine Phasenraumfunktion A ist genau dann eine Erhaltungsgröße, wenn {H, A} = 0 ist.
Die Gleichung {H, A} = 0 ist ein System von partiellen Differenzialgleichungen für die Koordinatendarstellung A({q µ }, {pµ }) der Phasenraumfunktion A. Wir haben also die Suche nach Erhaltungsgrößen
auf das Lösen dieser Differenzialgleichungen zurückgeführt. Allerdings wäre es sehr mühsam, dies für ein
gegebenes System explizit durchzuführen, um alle möglichen Erhaltungsgrößen zu finden. Wir werden daher zunächst ein paar Sätze über die Poisson-Klammer beweisen, die diese Suche nach Erhaltungsgrößen
erheblich vereinfachen.
Aufgabe 15.16 Auch die Ortskoordinaten q µ und die konjugierten Impulse pµ sind reellwertige Phasenraumfunktionen. Man zeige, dass sich für sie die folgenden Poisson-Klammern ergeben,
{q µ , q ν } = 0,
{q µ , pν } = −δ µν ,
{pµ , q ν } = δµ ν ,
{pµ , pν } = 0.
(15.67)
Die Poisson-Klammern dieser speziellen Funktionen sind also sehr einfache Phasenraumfunktionen,
nämlich konstante Funktionen mit dem Werten 0, 1 oder −1.
Aufgabe 15.17 Wir fassen die Phasenraumkoordinaten q µ und pµ zu einem einzigen Satz von Koordinaten
xm zusammen, wobei der Index m 2 N Werte annimmt, wenn das System N Freiheitsgrade hat. Man zeige,
dass die Bewegungsgleichungen des Systems dann wie folgt geschrieben werden k önnen,
ẋm = {H, xm }.
(15.68)
In dieser Form gelten die Bewegungsgleichungen auch dann noch, wenn x m beliebige krummlinige Koordinaten auf dem Phasenraum sind, also irgendwelche Funktionen von q µ und pµ , die einen Zustand eindeutig
festlegen. Wie kann man das beweisen, ohne eine längere Rechnung durchführen zu müssen?
Aufgabe 15.18 Es seien (x, y, z) die Ortskoordinaten eines Teilchens im dreidimensionalen Raum und
(px , py , pz ) die kanonisch konjugierten Impulse. Auf dem sechsdimensionalen Phasenraum P, der durch
die Koordinaten (x, y, z, px , py , pz ) aufgespannt wird, betrachten wird die Funktionen
A = p x 2 + py 2 + z 2 ,
B = p y 2 + p z 2 + x2 ,
C = p z 2 + px 2 + y 2 .
(15.69)
Man berechne die Poisson-Klammern {A, B}, {B, C} und {C, A}.
Aufgabe 15.19 Man beweise die folgende Kettenregel für Poisson-Klammern. Sind Ak (q, p), mit k ∈
{1, . . . , K}, irgendwelche differenzierbaren Phasenraumfunktion, und ist F (a 1 , . . . , aK ) eine Funktion
mit K reellen Argumenten, so ist F (q, p) = F (A1 (q, p), . . . , Ak (q, p)) wieder eine Phasenraumfunktion.
Für die Poisson-Klammer dieser Funktion mit einer anderen gilt
{F (A1 , . . . , Ak ), B} =
X ∂F
{Ak , B}.
∂A
k
k
(15.70)
Dieser Regel ist völlig analog zur Kettenregel für partielle Ableitungen und gilt natürlich auch im zweiten
Argument der Poisson-Klammer.
158
Die Poisson-Algebra
Die Poisson-Klammer definiert ein Produkt auf dem Raum aller beliebig oft differenzierbaren Phasenraumfunktionen. Bezeichen wir diesen Raum wie in der Mathematik üblich mit C ∞ (P), so wird das Produkt durch die Abbildung
{, } :
C ∞ (P) × C ∞ (P) → C ∞ (P),
(A, B)
7→ {A, B}
(15.71)
definiert. Die Bezeichnung “Produkt” ist deshalb gerechtfertigt, weil die Poisson-Klammer die üblichen
Eigenschaften eines Produktes hat, nämlich linear in beiden Argumenten zu sein. Der Raum C ∞ (P) ist ein
Vektorraum, das heißt wir können Phasenraumfunktionen addieren und mit reellen Zahlen multiplizieren.
Es gilt dann für alle A, B, C ∈ C ∞ (P) und alle u ∈ R
Linearität
{A + B, C} = {A, C} + {B, C},
{u A, B} = u {A, B}.
(15.72)
Dasselbe gilt natürlich für das zweite Argument, was sich auch unmittelbar aus der folgenden Eigenschaft
ergibt. Die Poisson-Klammer ist antisymmetrisch, das heißt für alle A, B ∈ C ∞ (P) gilt
Antisymmetrie
{A, B} = −{B, A}.
(15.73)
Diese beiden Eigenschaften der Poisson-Klammer lassen sich sehr leicht aus der Definition (15.65) ablesen. Die folgende Eigenschaft ist nicht sofort offensichtlich, lässt sich aber durch explizites Nachrechnen
überprüfen. Für drei Phasenraumfunktionen A, B, C ∈ C ∞ (P) gilt die Jacobi-Identität
JacobiIdentität
{A, {B, C}} + {B, {C, A}} + {C, {A, B}} = 0.
(15.74)
Diese werden wir im folgenden einige Male benutzen, um Sätze über Erhaltungsgrößen zu beweisen.
Ein Produkt mit diesen drei Eigenschaften nennt man Lie-Produkt, und ein Vektorraum, auf dem ein LieProdukt definiert ist, heißt Lie-Algebra. Der Vektorraum C ∞ (P) wird also durch die Poisson-Klammer zu
einer Lie-Algebra.
Nun gibt es auf diesem Raum aber noch ein zweites Produkt, nämlich das gewöhnliche, punktweise
definierte Produkt von zwei Funktionen (A, B) 7→ A B. Setzen wir ein solches Produkt von zwei Funktionen in die Poisson-Klammer ein, so finden wir nach einer kurzen Rechnung, dass für je drei Funktionen
A, B, C ∈ C ∞ (P) die Leibniz- oder Produktregel gilt,
LeibnizRegel
{A B, C} = {A, C} B + A {B, C}.
(15.75)
Das ist im wesentlichen die Produktregel für Ableitungen. Die Poisson-Klammer wirkt auf jedes ihrer
Argumente wie ein Ableitungsoperator. Es gelten formal die gleichen Rechenregeln wie für das Ableiten
von Funktionen.
Auf dem Vektorraum C ∞ (P) sind folglich zwei Produkte definiert, die gewöhnliche, punktweise Multiplikation von zwei Funktionen, und die Poisson-Klammer. Sie sind im Sinne der Leibniz-Regel miteinander verträglich. Man kann das Bilden der Poisson-Klammer mit der gewöhnlichen Multiplikation in der
Reihenfolge vertauschen, wenn man Leibniz-Regel beachtet. Ein Vektorraum, auf dem in dieser Art und
Weise zwei Produkte definiert sind, heißt Poisson-Algebra.
Der Funktionenraum C ∞ (P) aller beliebig oft differenzierbaren Phasenraumfunktionen ist
eine Poisson-Algebra.
159
Aufgabe 15.20 Man beweise die Jacobi-Identität und die Leibniz-Regel durch Einsetzen der Definition
der Poisson-Klammer und direktes Nachrechnen.
Aufgabe 15.21 Wir kennen bereits ein ganz anderes Lie-Produkt, n ämlich das Kreuzprodukt auf einem
dreidimensionalen metrischen Vektorraum. Man überzeuge sich davon, dass dadurch tatsächlich eine LieAlgebra definiert wird. Warum handelt es sich nicht um eine Poisson-Algebra?
Aufgabe 15.22 Auf dem zweidimensionalen Phasenraum eines mechanischen Systems mit einen Freiheitsgrad seien die folgenden drei Funktionen definiert,
A1 = p 2 + q 2 ,
A2 = 2 p q,
A 3 = p2 − q 2 ,
(15.76)
wobei (q, p) ein kanonisches Koordinatensystem ist. Man berechne die Poisson Klammern dieser Funktionen untereinander und verifiziere die Jacobi-Identität.
Aufgabe 15.23 Für ein Teilchen im dreidimensionalen Euklidischen Raum seien ri die Ortskoordinaten
und pi die konjugierten Impulse. Die Komponenten des Drehimpulses sind dann
li = εijk rj pk .
(15.77)
Man berechne ihre Poisson-Klammern und zeige
{li , lj } = −εijk lk .
(15.78)
Wenn das Teilchen in freies Teilchen ist, dann gilt H = pi pi /(2 m). Man zeige, dass der Drehimpuls dann
eine Erhaltungsgröße ist.
Aufgabe 15.24 Man beweise folgenden Satz. Sind A und B zwei Erhaltungsgr ößen eines mechanischen
Systems, so ist auch C = {A, B} eine Erhaltungsgröße.
Der Energieerhaltungsatz
Was können wir nun mit der Poisson-Klammer und ihren Eigenschaften konkret anfangen? Wie bereits
gezeigt, haben wir mit der Poisson-Klammer ein zumindest prinzipiell sehr einfaches Verfahren zur Hand,
mit dem wir testen können, ob eine gegebene Phasenraumfunktion A eine Erhaltungsgröße ist oder nicht.
Wir müssen nur die Poisson-Klammer {H, A} ausrechnen. Wenn sie identisch verschwindet, dann ist A
eine Erhaltungsgröße, sonst nicht.
Eine ganz spezielle Erhaltungsgröße können wir sofort angeben. Es ist die Hamilton-Funktion selbst.
Wegen der Antisymmetrie gilt nämlich immer {H, H} = 0. Die einzige Voraussetzung, die wir bei der
ganzen Überlegung gemacht haben, ist, dass das System autonom ist, seine Hamilton-Funktion also nicht
explizit von der Zeit abhängt.
Ist die Hamilton-Funktion eines mechanischen System nicht explizit zeitabhängig, so ist sie
eine Erhaltungsgröße.
Das ist der Energieerhaltungsatz in der Hamiltonschen Mechanik. Er ergibt sich aus einer bestimmten
Symmetrie des betrachteten Systems, nämlich der Symmetrie unter einer Zeitverschiebung. Ein System ist
symmetrisch unter Zeitverschiebung, wenn es unabhängig davon, wann wir einen bestimmten Anfangszustand herstellen, stets die gleiche Trajektorie durchläuft. Genau das wird durch die Zeitunabhängigkeit der
Hamilton-Funktion zum Ausdruck gebracht.
Wir hatten diese Tatsache bereits anhand der Beispiele in Abbildung 15.1 diskutiert. Wir betrachten nun
die dort eingezeichneten Trajektorien noch einmal etwas genauer. Der Energieerhaltungsatz besagt, dass
160
der Wert der Funktion H auf jeder Trajektorie konstant ist. Also folgen die Trajektorien den Niveaulinien
von H, die in der Abbildung als gestichelte Linien eingezeichnet sind. Für den harmonischen Oszillator
sind dies Ellipsen, für das Pendel ergeben sich etwas komplizierte Linien. In beiden Fällen folgen die
Trajektorien dem Verlauf dieser Linien.
Für ein System mit nur einem Freiheitsgrad, dessen zweidimensionaler Phasenraum durch die kanonischen Koordinaten (q, p) aufgespannt wird, hat dies eine interessante Konsequenz. Wir können nämlich
allein aus dem Verlauf der Niveaulinien von H bereits auf die möglichen Bewegungsformen des System
schließen. Tatsächlich haben wir eine ganz ähnlich Diskussion bereits in Kapitel 7 im Rahmen der Newtonschen Mechanik durchgeführt, um die Bewegungen eines Systems mit nur einem Freiheitsgrad qualitativ
zu beschreiben. Auch dort beruhte das Vorgehen auf dem Energieerhaltungsatz.
Betrachten wir zum Beispiel den Phasenraum des Pendels in Abbildung 15.1(b), so erkennen wir, dass es
im wesentlichen zwei Typen von Niveaulinien gibt, nämlich solche, die sich um den Zylinder wickeln, und
solche, die der Ursprung umrunden. Folglich gibt es auch zwei Bewegungsformen des Pendels, nämlich
das sich überschlagende und das oszillierende Pendel. Dazwischen liegt die Kriechbahn als Grenzfall. Sie
entspricht der speziellen Niveaulinien, die die beiden Bereiche des Phasenraumes voneinander trennt.
An den zwei Gleichgewichtslagen bei q = 0 und p = 0 unten, sowie bei q = ±π` und p = 0 oben,
weisen die Niveaulinien jeweils eine Besonderheit auf. Am stabilen Gleichgewichtspunkt unten bilden sie
kleine Kreise, oder genauer Ellipsen. Wie man sich leicht überzeugt, besitzt die Hamilton-Funktion des
Pendels dort ein lokales Minimum. Es ist sogar das absolute Minimum. Insbesondere verschwindet dort
auch der Gradient von H. Tatsächlich ist genau das das Kriterium für das Vorliegen eines Gleichgewichtspunktes im Phasenraum. Verschwindet nämlich der Gradient der Funktion H(q, p), so folgt daraus
q̇ µ =
∂H
= 0,
∂pµ
ṗµ = −
∂H
= 0.
∂q µ
(15.79)
Das System verbleibt also für immer in diesem Zustand, wenn man ihn als Anfangszustand wählt.
Ob ein solcher Gleichgewichtszustand stabil oder instabil ist, können wir ebenfalls aus den Niveaulinien
ablesen. Bilden die Niveaulinien in der Nähe des Gleichgewichstpunktes geschlossene Kurven, so ist das
Gleichgewicht stabil. Denn dann würde ein kleine Störung dazu führen, dass das System in der Nähe des
Gleichgewichts oszilliert. Das ist immer dann der Fall, wenn die Hamilton-Funktion am Gleichgewichtspunkt ein lokales Minimum oder Maximum hat. Laufen die Niveaulinien jedoch vom Gleichgewichtspunkt
weg, so liegt ein Sattelpunkt des Hamilton-Funktion vor. In diesem Fall ist das Gleichgewicht instabil, da
sich das System bei einer kleinen Störung auf einer solchen Niveaulinie weit vom Anfangspunkt entfernt.
Für ein System mit nur einem Freiheitsgrad lassen sich auf diese Weise allein aus der Hamilton-Funktion
und deren Niveaulinien bereits sehr viele Schlüsse über die Dynamik des Systems ziehen. Ausgangspunkt
ist dabei der Energieerhaltungssatz und die geometrische Interpretation der Bewegung als Trajektorie im
Phasenraum. Für Systeme mit mehreren Freiheitsgraden ist dies nicht mehr so einfach. Dann gilt zwar
immer noch der Energieerhaltungsatz, aber die Hamilton-Funktion hat keine Niveaulinien mehr, sondern
höherdimensionale Niveauflächen. Zwar bewegt sich das System dann immer noch auf einer solchen Niveaufläche, aber daraus allein können wir noch nicht auf den Verlauf der Trajektorie schließen. Das Ziel
ist es deshalb, weitete Erhaltungsgrößen zu finden.
Aufgabe 15.25 Man zeige, dass der Energieerhaltungssatz in der Lagrangeschen Mechanik wie folgt formuliert werden kann. Hängt die Lagrange-Funktion nicht explizit von der Zeit ab, so ist die Gr öße
E = q̇ µ
∂L
−L
∂ q̇ µ
(15.80)
eine Erhaltungsgröße. Ihr Wert auf einer physikalischen Bahn entspricht dem Wert der Hamilton-Funktion
auf der entsprechenden Trajektorie.
161
Aufgabe 15.26 Es gibt noch eine andere Situation, in der wir aus einer gegebenen Hamiltonfunktion sofort auf eine Erhaltungsgröße schließen können. Das hatten wir sogar schon an der einer oder anderen
Stelle verwendet. Nehmen wir an, die Funktion H hängt von einer bestimmten Ortskoordinate ϕ nicht
ab. Das gilt zum Beispiel für die Hamilton-Funktion (15.46) des zweidimensionalen harmonischen Oszillators, dargestellt in Polarkoordinaten. Man zeige, dass dann der kanonisch konjugierte Impuls p ϕ eine
Erhaltungsgröße ist. Man wende diesen Satz auf ein freies Teilchen im dreidimensionalen Raum an. Welche
Erhaltungsgrößen findet man?
162
16 Symmetrien
Das Ziel dieses Abschnittes ist es, eines der wichtigsten Theoreme der theoretischen Physik zu beweisen,
das erstmals von Emmy Noether im Jahre 1905 formuliert wurde. Es stellt eine Beziehung her zwischen
den Symmetrien eines Systems und seinen Erhaltungsgrößen. Ein sehr spezielles Beispiel für eine solche
Beziehung kennen wir schon. Für ein Hamiltonsches mechanisches System, dessen Bewegungsgleichungen zeitunabhängig, also symmetrisch unter Zeitverschiebungen sind, ist die Energie eine Erhaltungsgröße.
Es gibt verschiedene Versionen dieses Theorems in der klassischen Mechanik, die auf den verschiedenen Formulierungen der Bewegungsgleichungen beruhen. Im Hamiltonschen Formalismus lässt sich das
Noether-Theorem besonders elegant auf eine geometrische Art und Weise aufschreiben und beweisen.
Außerdem wird in es genau der gleichen Form später in der Quantenmechanik wieder auftauchen. Wir
werden uns deshalb auf die Hamiltonsche Darstellung beschränken.
Sie ist zugleich auch die allgemeinste, denn anders als die oft in Mechanik-Lehrbüchern dargestellt
Lagrangesche Formulierung sind hier keine komplizierten Fallunterscheidungen nötig, um wirklich alle
möglichen Symmetrien und damit alle Erhaltungsgrößen eines mechanischen Systems zu erfassen. Allerdings erfordert das ein wenig Vorarbeit. Wir benötigen ein paar zusätzliche Begriffe, insbesondere den
eines Flusses, sowie die geometrische Darstellung der Poisson-Klammer durch eine symplektische Form
als Tensorfeld. Beides werden wir in diesem Kapitel einführen.
Nachdem wir diese Konzepte definiert und ihre Eigenschaften studiert haben, wird sich der Beweis
der Noether-Theorems in wenigen Zeilen erledigen lassen. Auch das ist ein Vorteil der Hamiltonschen
Formulierung. Nachdem man die mathematischen Strukturen eines Phasenraumes erst einmal verstanden
hat, ist das Noether-Theorem eigentlich etwas völlig selbstverständliches. Dass sich dahinter eine tiefe
mathematische Einsicht in die Struktur von mechanischen, und später ganz allgemeinen Hamiltonschen
Systemen verbirgt, fällt gar nicht mehr auf.
Allgemeine Phasenraumkoordinaten
Im letzten Kapitel haben wir den Hamiltonschen Fluss als eine geometrische Beschreibung der Zeitentwicklung eines mechanischen System kennen gelernt. Außerdem haben wir die Poisson-Klammer eingeführt, die je zwei Phasenraumfunktionen eine dritte zurordnet. Auch diese Zuordnung kann man geometrisch verstehen. Damit, und mit dem Zusammenhang zwischen diesen beiden Strukturen, wollen wir
uns nun näher befassen.
Der erste Schritt zu einer geometrischen Darstellung der Poisson-Klammer ist die Einführung eines
verallgemeinerten Koordinatensystems im Phasenraum P. Wir fassen dazu das Paar (q, p) ∈ P zu einem
Punkt x ∈ P zusammen, wobei wir P als affinen Raum oder als glatte Mannigfaltigkeit auffassen, je
nachdem, welches mechanische System wir gerade betrachten.
Anschließend führen wir auf dem Raum P ein Koordinatensystem {x m } ein. Der Index m läuft über
2 N Werte, wenn N die Zahl der Freiheitsgrade, also die Dimension des Konfigurationsraumes ist. Das
Koordinatensystem {xm } kann völlig beliebig sein. Beliebig heißt nicht nur krummlinig, sondern auch,
dass wir in keiner Weise mehr zwischen “Orten” und “Impulsen” unterscheiden müssen. Entscheidend ist
nur, dass jeder Satz von 2 N reellen Zahlen {xm } genau einen Zustand x ∈ P festlegt und umgekehrt.
Jedenfalls soll dies im Rahmen der üblichen Einschränkungen gelten, die wir bei krummlinigen Koordinatensystemen, oder allgemeiner bei Karten auf einer Mannigfaltigkeit machen müssen.
Wenn wir ein solches Koordinatensystem einführen, können wir die Hamilton-Funktion, genau wie jede andere Phasenraumfunktion, als Funktion der Koordinaten {x m } darstellen. Aber reicht das, um die
Bewegungsgleichungen in diesen Koordinaten aufzustellen? Offenbar nicht, denn wie sollen wir diese
Koordinaten in die Hamiltonschen Bewegungsgleichungen (15.25) einsetzen, wenn wir nicht wissen, wel-
163
che Koordinaten Orte und welche Impulse sind?
Vielleicht hilft es, die folgende alternative Darstellung der Bewegungsgleichungen zu benutzen. Wir
hatten gezeigt, dass wir die Zeitableitung jeder Phasenraumfunktion entlang einer Trajektorie durch die
Poisson-Klammer (15.66) ausdrücken können, also
Ȧ = {H, A}.
(16.1)
Die neuen Phasenraumkoordinaten sind Funktionen in diesem Sinne. Jede einzelne Koordinate x m ist eine
reelle Funktion auf dem Phasenraum. Für die Zeitentwicklung der Koordinaten gelten also die Gleichungen
ẋm = {H, xm }.
(16.2)
Dies ist tatsächlich ein vollständiger Satz von Bewegungsgleichungen. Wir geben als Anfangsbedingungen
die Werte xm (0) = x0m vor, also den Anfangszustand x(0) = x0 , und können dann die Gleichungen (16.2)
integrieren. Wir erhalten eine Trajektorie x(t), dargestellt durch die Koordinatenfunktionen x m (t).
Allerdings gibt es ein kleines Problem. Wie berechnen wir die Poisson-Klammer eigentlich? Um die
Definition (15.65) zu verwenden, benötigen wir auch wieder Orte und Impulse. Anscheinend wird durch
die ursprünglich vorhandene Unterscheidung zwischen Orten q µ und Impulsen pµ eine mathematische
Struktur auf dem Phasenraum P definiert, die wir nicht mehr sehen, wenn wir allgemeine Koordinaten x m
verwenden. Ohne diese Struktur ist es offenbar nicht möglich, die Bewegungsgleichungen aufzustellen.
Die Kenntnis der Hamilton-Funktion allein genügt nicht.
Um herauszufinden, was für eine zusätzliche Struktur das ist, müssen wir noch einmal auf ein kanonischen Koordinatensystem zurückgreifen, also eines, das zwischen Orten q µ und Impulsen pµ unterscheidet.
Zwischen den beiden Koordinatensystemen vermittelt dann eine Übergangsfunktion, das heißt wir können
wahlweise die “neuen” Koordinaten xm als Funktionen der ”alten” Koordinaten q µ und pµ darstellen, oder
umgekehrt die alten Koordinaten q µ und pµ als Funktionen der neuen Koordinaten xm .
Entsprechend können wir eine Phasenraumfunktion A : P → R wahlweise als Funktion der neuen
Koordinaten A(x) oder als Funktion der alten Koordinaten A(q, p) darstellen. Haben wir zwei solche
Funktionen gegeben, können wir wie folgt ihre Poisson-Klammer berechnen,
∂A ∂B
∂A ∂xm ∂xn
∂A ∂B
−
=
∂pµ ∂q µ ∂q µ ∂pµ
∂xm ∂pµ ∂q µ
∂A ∂xm ∂xn ∂xm ∂xn ∂B
= m
−
=
∂x
∂pµ ∂q µ
∂q µ ∂pµ ∂xn
{A, B} =
∂B
∂A ∂xm ∂xn ∂B
−
∂xn ∂xm ∂q µ ∂pµ ∂xn
∂A
m
n ∂B
.
m {x , x }
∂x
∂xn
(16.3)
Hier haben wir A und B zuerst als Funktionen von q und p betrachtet, die Definition der Poisson-Klammer
eingesetzt, und anschließend, wie immer mit Hilfe der Kettenregel, die partiellen Ableitungen in das neue
Koordinatensystem umgerechnet. Dazu haben wir A und B als Funktionen von x aufgefasst.
Aus dem Ergebnis schließen wir, dass wir jede Poisson-Klammer von zwei Funktionen A(x) und B(x)
ausrechnen können, sobald wir die Poisson-Klammern {xm , xn } der Koordinaten miteinander kennen.
Dann können wir auch die Klammern (16.2) ausrechnen und die Bewegungsgleichungen aufstellen. Die
fundamentalen Klammern {xm , xn } können wir uns allerdings nur verschaffen, indem wir auf ein kanonisches, also aus Orten und Impulsen bestehendes Koordinatensystem Bezug nehmen.
Da das alles bis jetzt sehr abstrakt ist, wollen wir die wesentlichen Schritte an einem einfachen Beispiel
noch einmal wiederholen. Der Phasenraum P sei der eines eindimensionalen harmonischen Oszillators.
Das ist ein zweidimensionaler Raum, in dem ein Punkt, also ein Zustand durch ein Paar (q, p) dargestellt
wird. Genauer gesagt, (q, p) ist ein kanonisches Koordinatensystem auf P, wobei q der Ort und p der
konjugierte Impuls ist. Die Hamilton-Funktion soll wie üblich durch
H(q, p) =
m ω2 q2
p2
+
2m
2
164
(16.4)
gegeben sein. Die Federkonstante κ = m ω 2 haben wir durch die Masse und die Eigenfrequenz ausgedrückt.
Wir führen nun ein spezielles Polarkoordinatensystem (J, φ) auf P ein, wobei J die radiale Koordinate
und φ die Winkelkoordinate mit der Periode 2π ist. Die Beziehung zu den kanonischen Koordinaten (q, p)
lautet
r
q
2J
q=
(16.5)
sin φ,
p = 2 m ω J cos φ.
ωm
Die Definition weicht ein wenig von der sonst üblichen ab, insbesondere wegen der Wurzel und dem Auftreten der Parameter m und ω. Wir müssen diese Parameter aber schon aus Dimensionsgründen verwenden.
Da q und p unterschiedliche physikalische Dimensionen haben, können wir nicht einfach p = R cos φ und
q = R sin φ setzen, wobei R irgendeine radiale Koordinate ist.
Aufgabe 16.1 Man zeige, dass q genau dann die Dimension L änge und p die Dimension Impuls hat, wenn
J die Dimension Wirkung, also Energie mal Zeit oder Länge mal Impuls hat.
Die Koordinate J hat also die Dimension Wirkung, und die Winkelvariable φ ist natürlich dimensionslos.
Der Grund, warum man ein Polarkoordinatensystem im Phasenraum eines harmonischen Oszillators gerade so wählt, ergibt sich aus der folgenden sehr einfachen Darstellung der Hamilton-Funktion. Man findet
nämlich
H(J, φ) = ω J.
(16.6)
Da ω eine inverse Zeit ist, ergibt sich für H die Dimension Energie, wie es natürlich auch sein muss.
Die radiale Koordinate J ist also im wesentlichen die Energie des Oszillators und hat damit auch eine
physikalische Bedeutung, so wie bei einem Polarkoordinatensystem in den Euklidischen Ebene die radiale
Koordinate der metrische Abstand vom Ursprung ist.
Allein mit der Feststellung, dass die Hamilton-Funktion in dem neuen Koordinatensystem diese einfache Form annimmt, können wir allerdings noch recht wenig anfangen. Um die Bewegungsgleichungen
aufzustellen, müssen wir auch die Poisson-Klammern der neuen Koordinaten kennen, und diese müssen
wir uns aus der Koordinatentransformation (16.5) verschaffen. Da wir zwei Koordinaten haben, benötigen
wir vier Klammern. Allerdings sind zwei davon wegen der Antisymmetrie gleich Null, und die anderen
beiden sind bis aufs Vorzeichen gleich,
{J, J} = 0,
{φ, φ} = 0,
{J, φ} = −{φ, J}.
(16.7)
Wir müssen also nur eine einzige Klammer wirklich ausrechnen.
Aufgabe 16.2 Man löse die Koordinatentransformation (16.5) nach J und φ auf und zeige
{J, φ} =
∂J ∂φ ∂J ∂φ
−
= 1.
∂p ∂q
∂q ∂p
(16.8)
Die Klammern der neuen Koordinaten (J, φ) untereinander sind also genauso einfach wie die für die alten
Koordinaten (q, p). Die Bewegungsgleichungen sind sogar noch einfacher,
J˙ = {H, J} = {ω J, J} = ω {J, J} = 0,
φ̇ = {H, φ} = {ω J, φ} = ω {J, φ} = ω.
(16.9)
Die allgemeine Lösung ist
J(t) = J0 ,
φ(t) = φ0 + ω t,
165
(16.10)
p
J
φ
replacements
(c)
(d)
p
(b)
(a)
Abbildung 16.1: Der Phasenraum eines harmonischen Oszillators, dargestellt in Orts- und Impulskoordinaten (a), sowie in einem speziell an die Dynamik angepassten Polarkoordinatensystem (b). Es ist jeweils
dieselbe Trajektorie dargestellt, die in (b) den Koordinatenlinien J = konst folgt.
mit zwei Integrationskonstanten J0 ≥ 0 und φ0 . Dass es sich dabei tatsächlich um die bekannten Schwingungen des harmonischen Oszillators handelt, sieht man am besten, wenn man sich die Situation anhand
der Darstellung in Abbildung 16.1 anschaut.
Das Polarkoordinatensystem (J, φ) im Phasenraum ist so gewählt, dass die Kurven mit konstantem J
die Niveaulinien der Hamilton-Funktion sind. Also läuft der Zustand auf einer Trajektorie mit J = konst
um den Koordinatenursprung herum. Die Umlaufperiode ist 2π/ω, also ist die “Winkelgeschwindigkeit”
des Umlaufs gerade ω. Die Integrationskonstante J0 bestimmt die Energie und damit die Amplitude der
Schwingung, und φ0 ist die Phase, die angibt, in welchem Zustand sich das System zur Zeit t = 0 befindet.
Wir sehen also, dass sich die Bewegungsgleichungen in diesem Fall durch die Wahl eines bestimmten Koordinatensystems noch weiter vereinfachen lassen. Allerdings ist es jetzt nicht mehr sinnvoll, von
Orts- und Impulskoordinaten zu sprechen. Die Koordinaten (J, φ) haben keine unmittelbar anschauliche
physikalische Interpretation im Sinne von messbaren Größen. Sie beschreiben nicht des Ausschlag des
Oszillators oder seine Geschwindigkeit oder dergleichen.
Statt dessen sind die neuen Koordinaten an die Dynamik des Systems angepasst. Damit ist gemeint,
dass eine der Koordinaten im wesentlichen die Hamilton-Funktion ist, und die Poisson-Klammer wieder
die kanonische Form hat, also die Klammern der Koordinaten miteinander gleich Eins ist. Die Koordinaten
J und φ verhalten sich wie eine Ortskoordinate und der konjugierte Impuls, jedenfalls wenn man von ihrer
physikalischen Interpretation absieht und davon, dass es sich um ein krummliniges Koordinatensystem mit
den üblichen Einschränkungen an die Wertebereiche der Koordinaten handelt.
Lassen sich die Koordinaten xm eines ausgewählten Koordinatensystem genau wie zuvor die Orte q µ
und die Impulse pµ zu Paaren ordnen, so dass ihre Poisson-Klammern die Form (15.67) haben, so nennt
man das Koordinatensystem kanonisch. Für ein kanonisches Koordinatensystem gilt also
{xm , xn } = −εmn ,
(16.11)
wobei εmn eine antisymmetrische (2 N )×(2 N )-Matrix ist, deren Einträge Null oder Eins sind. Indem wir
166
die Koordinaten entsprechend anordnen, können wir sie immer auf die Form
0 ··· 0 1 ··· 0
.. .. . . ..
..
. .
. .
.
0 ··· 0 0 ··· 1
mn
ε
=
−1 · · · 0 0 · · · 0
. .
..
..
. . ... ...
.
0 · · · −1 0 · · · 0
(16.12)
bringen. Oben rechts steht eine N ×N -Einheitsmatrix, und unten links die negative N ×N -Einheitsmatrix.
Diese Matrix ergibt sich auch dann aus den Poisson-Klammern, wenn wir für die Koordinaten x µ die
ursprünglichen Orte q µ und Impulse pµ einsetzen. Für einen zweidimensionalen Phasenraum ist εmn nichts
anderes als das Levi-Civita-Symbol.
Im Falle des harmonischen Oszillators sind sowohl das ursprüngliche Koordinatensystem (q, p) als auch
das neue Koordinatensystem (J, φ) kanonisch. Damit das Vorzeichen der Klammern stimmt, müssen wir
J als Impuls- und φ als Ortskoordinate auffassen, das heißt wir sollten eigentlich besser (φ, J) schreiben,
wenn wir das Koordinatensystem kanonisch nennen wollen. Das ist aber wegen der fehlenden physikalischen Interpretation als Ort und Impuls eine willkürliche Festlegung. Würden wir φ durch −φ ersetzen,
wäre J der Ort und φ der konjugierte Impuls.
Der Begriff eines kanonischen Koordinatensystems ist also sehr viel allgemeiner als der, den wir im
letzten Kapitel eingeführt haben. Entscheidend sind allein die Poisson-Klammern der Koordinaten, nicht
deren physikalische Interpretation als Orte und Impulse.
Darüber hinaus gibt es sogar einen Satz, den so genannten Gl ättungssatz, der besagt, dass es unter bestimmten Bedingungen immer ein kanonisches Koordinatensystem gibt, in dem eine der Koordinaten die
Hamilton-Funktion ist. In diesem Koordinatensystem ist die Dynamik dann besonders einfach. Alle bis
auf eine Koordinate, nämlich die, die zu der Hamilton-Funktion kanonisch konjugiert ist, sind konstant,
und diese eine Koordinaten ist eine lineare Funktion der Zeit. Die Trajektorien sind also spezielle Koordinatenlinien, und in letzter Konsequenz bedeutet das, dass alle Phasenräume von mechanischen Systemen
mit gleich vielen Freiheitsgraden im wesentlichen die gleiche Struktur haben.
Der Beweise dieses Satzes erfordert allerdings Methoden aus der Theorie der differenzierbaren Mannigfaltigkeiten, die hier ein wenig zu weit führen würden. Oft hilft der Satz auch wenig, wenn es darum
geht, die Bewegungsgleichungen eines gegebenen Systems zu lösen, denn um die Koordinaten zu konstruieren, muss man im wesentlichen genau das tun. Außerdem macht er nur eine lokale Aussage über ein
krummliniges Koordinatensystem. Über das globale Verhalten von Trajektorien macht er keine Aussagen.
Wir begnügen uns daher, was die Konstruktion von speziellen, an die Dynamik angepassten Koordinatensystem betrifft, mit dem Beispiel des harmonischen Oszillators.
Aufgabe 16.3 Man betrachte denselben harmonischen Oszillator und f ühre eine lineare Koordinatentransformation von (q, p) nach (q̃, p̃) durch, mit
q = a q̃ + b p̃,
p = c q̃ + d p̃.
(16.13)
Man stelle die Hamiltonfunktion als Funktion von (q̃, p̃) dar, und berechne die Poisson-Klammer {p̃, q̃}.
Welche Bedingung muss man an die Konstanten a, b, c, d stellen, damit {p̃, q̃} = 1 ist? Welche Bedingungen
ergeben sich aus der Forderung, dass die transformierte Hamilton-Funktion wieder die Darstellung
H(p̃, q̃) =
p̃2
m̃ ω̃ 2 q 2
+
2 m̃
2
(16.14)
hat? Wenn beide Bedingungen erfüllt sind, dann sind die Bewegungsgleichungen für (q̃, p̃) mit denen für
(q, p) identisch. Gibt es solche Koordinaten?
167
Aufgabe 16.4 Wenn man die Koordinaten auf dem Phasenraum beliebig w ählen kann, dann kann man
statt der Impulse auch die Geschwindigkeiten der Teilchen als Koordinaten verwenden. Wir betrachten
dazu ein einzelnes freies Teilchen im dreidimensionalen Raum. Seine Ortskoordinaten sind r i , mit i ∈
{x, y, z}, und die dazu konjugierten Impulse sind pi , so dass für die Hamilton-Funktion und die PoissonKlammern
pi pi
,
{pi , rj } = δij
(16.15)
H=
2m
gilt. Man ersetze die Impulse pi durch die Geschwindigkeiten vi als Phasenraumkoordinaten. Wie sieht
dann die Hamilton-Funktion aus? Welche Poisson-Klammern ergeben sich f ür die Koordinaten untereinander? Welche Bewegungsgleichungen ergeben sich?
Die symplektische Struktur
Wir wollen nun etwas näher untersuchen, welche zusätzliche geometrische Struktur durch die PoissonKlammer auf dem Phasenraum definiert wird. Wir hatten bereits gezeigt, dass die Kenntnis der Klammern
{xm , xn } der Koordinaten untereinander genügt, um alle anderen zu berechnen. In einem kanonischen
Koordinatensystem sind diese Klammern gleich Null oder Eins. Nun betrachten wir jedoch ein beliebiges Koordinatensystem. Dann sind die Klammern {xm , xn } wieder irgendwelche Phasenraumfunktionen. Bei 2 N Koordinaten gibt es (2 N )2 von diesen Klammern. Wir fassen sie zu einer (2 N )×(2 N )matrixwertigen Funktion zusammen, die wir mit
Ω mn = {xm , xn }
(16.16)
bezeichnen. Einige Eigenschaften dieser Matrix folgen unmittelbar aus den entsprechenden Eigenschaften
der Poisson-Klammer. Sie ist zum Beispiel antisymmetrisch
Ω mn = −Ω nm .
(16.17)
Zwei weitere nützliche Eigenschaften sind nicht sofort erkennbar. Wir werden sie aber gleich beweisen.
Die Matrix Ω mn ist invertierbar. Es gibt eine inverse Matrix Ωmn mit
Ω mn Ωnk = δ mk .
(16.18)
Die inverse Matrix ist dann natürlich ebenfalls antisymmetrisch,
Ωmn = −Ωnm .
(16.19)
Schließlich hat die Ableitung der Matrix Ω mn nach den Koordinaten, oder genauer die der inverse Matrix
Ωmn noch ein spezielle Eigenschaft. Die folgende zyklische Ableitung verschwindet,
∂m Ωnk + ∂k Ωmn + ∂n Ωkm = 0.
(16.20)
Bevor wir diese Eigenschaften allgemein beweisen, stellen wir zunächst fest, dass sie in einem kanonischen
Koordinatensystem erfüllt sind. Dann ist nämlich Ω mn = −εmn , mit der Matrix aus (16.12). Diese Matrix
ist offenbar invertierbar. Die inverse Matrix ist Ωmn = εmn , wobei εmn dieselbe Matrix ist, die in zwei
Dimensionalen wieder mit dem entsprechenden Levi-Civita-Symbol übereinstimmt. Man sieht sofort, dass
dann die Eigenschaften (16.17–16.20) vorliegen. In der letzten Gleichung verschwinden sogar alle drei
Terme jeweils für sich.
Nun ist aber nicht jedes Koordinatensystem kanonisch. Man kann aber zeigen, dass sich die Matrizen
Ω mn und Ωmn beim Übergang von einem Koordinatensystem zu einem anderen wie Tensoren zweiter
Stufe transformieren. Etwas genauer, Ω mn ist ein Tensor der Stufe (2, 0), und Ωmn ist ein Tensor der Stufe
(0, 2).
168
Der Beweis ergibt sich unmittelbar aus den Eigenschaften der Poisson-Klammer. Weiter oben haben wir
gezeigt, wie man die Poisson-Klammer zweier beliebiger Funktionen berechnet, wenn man die Klammern
{xm , xn } der Koordinaten kennt. Die Gleichung (16.3) können wir jetzt wie folgt schreiben. Für zwei
Funktionen A(x) und B(x) gilt
{A, B} = Ω mn
∂A ∂B
= Ω mn ∂m A ∂n B.
∂xm ∂xn
(16.21)
Es sei nun {xa } ein anderes Koordinatensystem, das wir von dem Koordinatensystem {x m } durch eine
andere Indexmenge unterscheiden. Keines von beiden muss kanonisch sein. Dann können wir die Koordinaten xa als Funktionen der Koordinaten xm auffassen und ihre Poisson-Klammern berechnen. Das ergibt
Ω
ab
a
b
= {x , x } = Ω
mn
∂xa ∂xb
∂xm ∂xn
(16.22)
Das ist das Transformationsverhalten eines Tensors der Stufe (2, 0) beim Übergang von einem Koordinatensystem zum anderen.
Wir haben also gezeigt, dass durch die Poisson-Klammern der Koordinaten miteinander ein Tensor Ω mn
der Stufe (2, 0) definiert wird. Wie wir bereits in Kapitel 9 für eine Metrik gezeigt haben, folgt dann aus der
Invertierbarkeit der Matrixdarstellung dieses Tensors seine Invertierbarkeit in jedem Koordinatensystem,
wobei die inverse Matrix Ωmn wie ein Tensor der Stufe (0, 2) transformiert.
Es bleibt jetzt nur noch zu zeigen, dass auch die Gleichung (16.20) in jedem Koordinatensystem gilt.
Dazu muss man zeigen, dass die linke Seite wie ein Tensor der Stufe (0, 3) transformiert. Wir erinnern uns,
dass die Ableitungen eines Tensors nach den Koordinaten in einem krummlinigen Koordinatensystem im
allgemeinen keinen Tensor liefert. Die einzelnen Terme werden also im allgemeinen nicht verschwinden.
Die zyklische Kombination der Ableitungen ist jedoch wieder ein Tensor. Also gilt die Gleichung (16.20)
in jedem Koordinatensystem.
Aufgabe 16.5 Es sei Amn ein antisymmetrisches Tensorfeld der Stufe (0, 2) auf einer Mannigfaltigkeit
oder einem affinen Raum. Man zeige, dass dann
Bkmn = ∂k Amn + ∂m Ank + ∂n Akm
(16.23)
ein Tensor der Stufe (0, 3) ist. Man verallgemeinere diese Aussage f ür einen total antisymmetrischen Tensor Am ··· n der Stufe (0, l) mit l ≥ 0. Welche bereits bekannten Aussagen ergeben sich f ür l = 0 und
l = 1?
Einen Tensor Ωmn mit den oben beschriebenen Eigenschaften nennt man symplektische Form, und den
inversen Tensor Ω mn bezeichnet man als inverse symplektische Form. Einen Raum, auf dem ein solcher
Tensor definiert ist, ist ein symplektischer Raum. Das ist das geometrische Äquivalent zu einer PoissonKlammer.
Der Phasenraum eines mechanischen Systems ist ein symplektischer Raum.
Eine symplektische Form ist so etwas wie eine “antisymmetrische Metrik”. Genau wie eine Metrik können
wir die symplektische Form invertieren, und wir können mit ihr Vektoren auf dualen Vektoren abbilden
und umgekehrt. Oder anders ausgedrückt, wir können mit Hilfe der symplektischen Form Indizes hoch
und runter ziehen.
Tatsächlich spielt genau diese Tensoroperation eine Rolle, wenn wir die Bewegungsgleichungen mit
Hilfe der symplektischen Form formulieren. Die Hamiltonschen Bewegungsgleichungen (16.2) lassen sich
jetzt nämlich wie folgt aufschreiben,
ẋk = {H, xk } = Ω mn
∂H ∂xk
= Ω mn ∂m H δ kn = Ω mk ∂m H.
∂xm ∂xn
169
(16.24)
Die Zeitableitung des Zustandes ist ein Vektor mit den Komponenten ẋ k . Diesen bekommen wir, indem wir
den Gradient der Hamilton-Funktion ∂m H bilden, und diesem dualen Vektor mit Hilfe der symplektischen
Struktur Ω mn auf einen Vektor abbilden.
In diesem Form gilt die Bewegungsgleichung in jedem beliebigen Koordinatensystem. Sie hat damit
eine geometrische bekommen. Außerdem wird deutlich, dass es nicht aller ein Hamilton-Funktion ist,
die die Dynamik des Systems bestimmt, sondern dass auch die symplektische Form als eine wesentliche
Struktur des Phasenraumes in die Bewegungsgleichung eingeht. Erst beide Strukturen gemeinsam, also
die Hamilton-Funktion und die symplektische Form, bestimmen die Dynamik des Systems eindeutig.
Ansonsten gelten natürlich weiterhin die bereits früher gemachten Aussagen über Trajektorien, also über
die Lösungen der Bewegungsgleichungen (16.24). Durch jeden Punkt x ∈ P geht genau eine Trajektorie,
der Phasenraum wird vollständig von ihnen ausgefüllt, und sie können sich niemals schneiden. All das
folgt aus der speziellen Form der Bewegungsgleichung (16.24), die die Zeitentwicklung x(t) festlegt,
sobald der Anfangszustand x(0) = x0 gegeben ist.
Aufgabe 16.6 Es sei eine Mannigfaltigkeit M gegeben, auf der eine symplektische Form definiert ist, also
ein invertierbarer Tensor Ωmn mit den Eigenschaften (16.17–16.20). Durch (16.21) werde eine PoissonKlammer definiert. Man zeige, dass die sie Eigenschaften (15.72–15.75) hat. Die Definition einer symplektischen Form ist also zur Definition einer Poisson-Klammer äquivalent.
Aufgabe 16.7 Warum kann eine symplektische Form nur auf einem Raum mit gerader Dimension existieren?
Vektorfelder und Flüsse
Die symplektische Struktur des Phasenraumes ist die Grundlage zur Beschreibung der Symmetrien eines
mechanischen Systems. Darüber hinaus benötigen wir noch den Begriff eines Flusses eines Vektorfeldes.
Da ist eine Verallgemeinerung des Hamiltonschen Flusses, den wir im vorigen Kapitel zur Beschreibung
der Zeitentwicklung eines Systems benutzt haben.
Wir betrachten zunächst irgendeinen affinen Raum oder eine Mannigfaltigkeit. Das spielt keine Rolle, da
wir im folgenden keine Abstandsvektoren benutzen, sondern nur solche Operationen durchführen, die auch
auf Mannigfaltigkeiten erlaubt sind. Den Raum bezeichnen wir mit M. Das einzige, was wir benötigen,
ist ein Vektorfeld ξ auf M, also eine Zuordnung x ∈ M 7→ ξ(x) ∈ T M. Wenn dieses Vektorfeld
hinreichend glatt ist, dann können wir die “Bewegungsgleichungen”
λ̇(τ ) = ξ(λ(τ ))
(16.25)
aufstellen. Darin übernimmt τ ∈ R die Rolle der “Zeit”, der Punkt bezeichnet die Ableitung nach τ , und
λ(τ ) ist eine parametrisierte Kurve, die wir “Trajektorie” nennen können. Formal ist die Situation genau
dieselbe wie im Falle der Hamiltonschen Bewegungsgleichungen im Phasenraum.
Wenn wir die Gleichung (16.25) in Koordinaten ausschreiben, also ein Koordinatensystem {x m } auf M
einführen und das Vektorfeld in seine Komponenten ξ m (x) zerlegen, so bekommen wir ein System von
gekoppelten Differenzialgleichungen erster Ordnung für die Koordinatenfunktionen λ m (τ ),
λ̇m (τ ) = ξ m (λ(τ )).
(16.26)
Dieses Gleichungsystem hat eine eindeutige Lösung, sobald wir die Anfangsbedingung λ(0) = x festlegen.
Analog zum Hamiltonschen Fluss definieren wir jetzt einen Fluss χ, der von dem Vektorfeld ξ erzeugt
wird. Der Fluss ist eine Abbildung
Fluss
χ:
M × R → M,
(x, τ )
170
7→
χ(x, τ ),
(16.27)
mit der Eigenschaft, dass bei festgehaltenem x die Funktion λ(τ ) = χ(x, τ ) eine Lösung der Bewegungsgleichung (16.25) ist, und zwar die zu der Anfangsbedingung λ(0) = x. Es gilt also
χ̇(x, τ ) = ξ(χ(x, τ )),
Flussgleichung I
χ(x, 0) = x.
(16.28)
Das ist dasselbe wie (16.25), nur dass wie hier quasi die Anfangsbedingung als Argument der Funktion
χ “mitschleppen”, so dass sich nicht nur eine Trajektorie τ 7→ λ(τ ), sondern eine ganze Schar von
Trajektorien τ 7→ χ(x, τ ) ergibt, nämlich eine für jeden Punkt x ∈ M.
Die Flussgleichung (16.25) können wir natürlich auch wieder in Komponenten zerlegen. In einem Koordinatensystem {xm } wird der Fluss durch die Koordinatenfunktionen χm (x, τ ) dargestellt. Für sie gilt
χ̇m (x, τ ) = ξ m (χ(x, τ )),
χm (x, 0) = xm .
(16.29)
Der Punkt bezeichnet hier wie im folgenden immer die Ableitung nach dem Flussparameter τ , den wir
uns als eine Art verallgemeinerte Zeit vorstellen können.
Eine wesentliche Eigenschaft jedes Flusses ist die Verkettungsregel
Verkettungsregel
χ(x, τ1 + τ2 ) = χ(χ(x, τ1 ), τ2 ).
(16.30)
Sie ergibt sich, wie man sich leicht überlegt, aus der Differenzialgleichung (16.28). Wir hatten uns das
bereits für den Hamiltonschen Fluss überlegt. Wenn sich das System zuerst über eine Zeitspanne τ 1 von
einem Zustand x in einen Zustand χ(x, τ1 ) entwickelt, und anschließend von diesem Zustand über eine
Zeitspanne τ2 in den Zustand χ(χ(x, τ1 ), τ2 ), so ist das Ergebnis dasselbe wie das einer Zeitentwicklung
von x über eine Zeitspanne von τ1 + τ2 , was den Endzustand χ(x, τ1 + τ2 ) ergibt.
Aufgabe 16.8 Man beweise die Gleichung (16.30) formal mit Hilfe der Differenzialgleichung (16.28).
Die Umkehrung dieses Satzes gilt auch. Man muss nur zusätzlich fordern, dass die Zuordnungen x 7→
χ(x, τ ) für jedes τ bijektiv sind. Wenn eine solche Schar von Abbildungen χ : M × R → M die
Verkettungsregel (16.30) erfüllt, dann handelt es sich um einen Fluss, der von einem Vektorfeld erzeugt
wird. Der Beweis ist ganz einfach. Wir leiten die Gleichung (16.30) nach τ 2 ab und setzen anschließend
τ1 = τ und τ2 = 0. Das ergibt
χ̇(x, τ ) = χ̇(χ(x, τ ), 0).
(16.31)
Nun definieren wir ein Vektorfeld ξ(x) = χ̇(x, 0). Dann gilt offenbar
χ̇(x, τ ) = ξ(χ(x, τ )).
(16.32)
Außerdem folgt aus der Verkettungsregel, wenn man τ1 = 0 setzt, χ(x, 0) = x. Dafür braucht man die
Bijektivität. Also ist χ der Fluss des Vektorfeldes ξ.
Definieren wir einen Fluss allgemein als eine Schar von bijektiven Abbildungen χ : M × R → M, für
die die Verkettungsregel erfüllt ist, dann gilt folgender Satz:
Jedes Vektorfeld erzeugt einen Fluss, und jeder Fluss wird von einem Vektorfeld erzeugt.
Das einfachste Beispiel für ein Vektorfeld ist ein konstantes Vektorfeld in einem affinen Raum. Sei also E
ein affiner Raum und ξ(x) = v ein konstantes Vektorfeld. Dann lautet die Flussgleichung
χ̇(x, τ ) = v,
χ(x, 0) = x,
(16.33)
die offenbar den Fluss
χ(x, τ ) = x + τ v
171
(16.34)
v
v
v
replacements
u
u
u
(d)
(b)
(a)
(c)
Abbildung 16.2: Das Vektorfeld (a) erzeugt eine Verschiebung, das Vektorfeld (b) eine Drehung, und das
Vektorfeld (c) eine hyperbolische Verzerrung.
als eindeutige Lösung hat. Der zu einem konstanten Vektorfeld gehörende Fluss ist eine Verschiebung.
Eine solche kann es natürlich nur auf einem affinen Raum geben. Auf einer glatten Mannigfaltigkeit gibt
es im allgemeinen keine konstanten Vektorfelder und auch keine Verschiebungen.
Weniger trivial ist das folgende Beispiel. Wir betrachten den dreidimensionalen Euklidischen Raum. Es
sei ein Koordinatenursprung o gegeben, und ein Einheitsvektor n. Dann definieren wir ein Vektorfeld
ξ(r) = n × (r − o).
(16.35)
Der Fluss dieses Vektorfeldes ist eine Drehung des Raumes um die durch n aufgespannte Achse. Das kann
man sich leicht klar machen. Am Ort r zeigt das Vektorfeld ξ(r) in eine Richtung senkrecht zu n und zum
Ortsvektor r − o, und zwar so, dass es mit diesen ein Rechtssystem bildet. Es verschwindet, wenn r auf
der durch n aufgespannten Achse liegt, und steigt linear mit dem Abstand von dieser Achse an.
Aufgabe 16.9 Um zu zeigen, dass der zugehörige Fluss tatsächlich eine Drehung ist, löse man die Flussgleichung und zeige, dass die Lösung wie folgt dargestellt werden kann,
χ(x, τ ) = o + rk + cos τ r⊥ + sin τ n × r⊥ ,
(16.36)
wobei rk und r⊥ die Anteile die Anteile des Ortsvektors r − o parallel und senkrecht zu n sind,
r = o + r k + r⊥ ,
rk ∝ n,
r⊥ ⊥ n.
(16.37)
Aufgabe 16.10 In der Abbildung 16.2 sind drei Vektorfelder in einem zweidimensionalen Raum mit den
Koordinaten (u, v) dargestellt, und zwar
(a):
ξ u (u, v) = 2,
ξ v (u, v) = 1,
(b):
ξ u (u, v) = −v,
ξ v (u, v) = u,
(c):
ξ u (u, v) = v,
ξ v (u, v) = u.
(16.38)
Man bestimmen jeweils den von dem Vektorfeld erzeugten Fluss.
Aufgabe 16.11 Es sei Q der 3 N -dimensionale Konfigurationsraum eines N -Teilchen-Systems. Durch die
kartesischen Koordinaten rα,i mit α ∈ {1, . . . , N } und i ∈ {x, y, z} wird ein Koordinatensystem auf
Q definiert. Wie sieht das Vektorfeld ξ mit den Komponenten ξ α,i aus, welches als Fluss eine simultane
Rotation aller Teilchen um einen Vektor n im Raum erzeugt?
172
Invariante Funktionen
Wir betrachten nun eine Funktion A : M → R, also ein skalares Feld auf dem Raum M. Wenn auf M
ein Fluss χ : M × R → M definiert ist, so können wir diesen mit der Funktion A verketten und auf diese
Weise ein Funktion A : M × R → R definieren,
A(x, τ ) = A(χ(x, τ )).
(16.39)
Wir können diese Abbildung als eine Schar von Funktionen M → R auffassen, mit einem Flussparameter
τ . Die Funktion x 7→ A(x, τ ) geht aus der Funktion x 7→ A(x) durch eine von dem Fluss erzeugte
Transformation hervor.
Das einfachste Beispiel ist wieder die Verschiebung in einem affinen Raum. Setzen wir für den Fluss
(16.34) ein, so ist
A(x, τ ) = A(x + τ v).
(16.40)
Das ist die um den Vektor −τ v verschobene Funktion. Der Fluss eines konstanten Vektorfeldes auf einem
affinen Raum bewirkt also eine Verschiebung der Funktion A in die dem Vektorfeld entgegengesetzte
Richtung.
Entsprechendes gilt für einen Fluss, der eine Drehung erzeugt. Das fließen einer Funktion unter einem
gegeben Fluss ist also nichts anderes als eine Verallgemeinerung dessen, was wir üblicherweise unter einer
Verschiebung oder Drehung einer Funktion im Raum verstehen.
Um die Wirkung eines Flusses auf eine Funktion zu berechnen, müssen wir den Fluss selbst gar nicht
kennen. Es genügt, das erzeugende Vektorfeld zu kennen. Um das möglichst einfach zu zeigen, benutzen
wir folgenden Trick. Wir schreiben die Gleichung (16.39) um, indem wir x durch χ(x, −τ ) ersetzen.
Dann lautet sie
A(χ(x, −τ ), τ ) = A(χ(χ(x, −τ ), τ )) = A(x).
(16.41)
Nun leiten wir beide Seiten nach τ ab, wobei sich rechts Null ergibt, da A(x) nicht von τ abhängt. Links
müssen wir einmal nach dem Argument τ von A ableiten, und einmal nach dem Argument −τ von χ. Das
ergibt
Ȧ(χ(x, −τ ), τ ) − χ̇m (x, −τ ) ∂m A(χ(x, −τ ), τ ) = 0.
(16.42)
Mit Ȧ(x, τ ) bezeichnen wir hier die Funktion, die sich durch Ableiten nach dem zweiten Argument ergibt,
und mit ∂m Aτ (x, τ ) bezeichnen wir wie üblich die Ableitung nach den Koordinaten des Punktes im ersten
Argument der Funktion. Nun setzen wir für die Ableitung des Flusses das Vektorfeld ein,
Ȧ(χ(x, −τ ), τ ) − ξ m (χ(x, −τ )) ∂m A(χ(x, −τ ), τ ) = 0.
(16.43)
Zum Schluss ersetzen wir χ(x, −τ ) wieder überall durch x, oder äquivalent dazu x durch χ(x, τ ). Dann
bekommen wir
Flussgleichung II
Ȧ(x, τ ) = ξ m (x) ∂m A(x, τ ) = ξ(x) · ∇A(x, τ ).
(16.44)
Diese Gleichung sagt uns, wie die Funktion A(x, τ ) unter dem Vektorfeld ξ fließt. Wenn wir noch die
Anfangsbedingung A(x, 0) = A(x) hinzunehmen, wird die transformierte Funktion A(x, τ ) durch diese
Differenzialgleichung für alle τ ∈ R eindeutig bestimmt.
Es gibt also zwei Methoden, die Transformation einer Funktion A unter dem Fluss eines Vektorfeldes
ξ zu berechnen. Man kann entweder zuerst den Fluss χ des Vektorfeldes bestimmen, und dann diesen in
die Funktion einsetzen, oder direkt die Flussgleichung (16.44) für die Funktion selbst lösen. Dies ist eine
partielle Differentialgleichung für die Funktion A(x, τ ), die von den Koordinaten {x µ } des Punktes x und
von dem Flussparameter τ abhängt. Sie besagt, dass die Ableitung nach dem Flussparameter gleich der
Richtungsableitung in Richtung des erzeugenden Vektorfeldes ist.
173
Ein wichtiges Konzept in diesem Zusammenhang ist das einer invarianten Funktion. Eine Funktion ist
unter dem Fluss eines Vektorfeldes invariant, wenn die transformierte Funktion, unabhängig vom Flussparameter, mit der ursprünglichen Funktion übereinstimmt. Wie man aus der Flussgleichung (16.44) entnimmt, ist das genau dann der Fall, wenn die Richtungsableitung von A(x) in Richtung des erzeugenden
Vektorfeldes ξ(x) für alle x verschwindet,
ξ(x) · ∇A(x) = 0
⇔
A(x, τ ) = A(x).
(16.45)
Genau dann verschwindet nämlich die Ableitung Ȧ(x, τ ) für alle x und alle τ .
Eine Funktion A ist genau dann unter dem Fluss eines Vektorfeldes ξ invariant, wenn die
Richtungableitung ξ · ∇A überall verschwindet.
Als Beispiele betrachten wir noch einmal die Verschiebungen und Drehungen im dreidimensionalen Euklidischen Raum, den wir uns als den Konfigurationsraum eines Teilchens vorstellen können. Es sei A(r)
eine Funktion des Ortes r, und ξ(r) = v ein konstantes Vektorfeld. Dann ist die Funktion A genau dann
unter dem Fluss dieses Vektorfeldes invariant, wenn für alle τ ∈ R
A(r + τ v) = A(r)
(16.46)
gilt, oder äquivalent dazu, wenn die Richtungsableitung von A in Richtung von v überall verschwindet,
v · ∇A(r) = 0.
(16.47)
Ist zum Beispiel v = ex , so darf A nicht von der Koordinaten rx abhängen.
An diesem Beispiel sehen wir, dass die Invarianz einer Funktion unter dem Fluss eines Vektorfeldes
etwas mit den Symmetrien dieser Funktion zu tun hat. Wenn eine Funktion A(r) nicht von der Koordinate
rx abhängt, dann ist sie symmetrisch unter Verschiebungen in x-Richtung. Ist eine Funktion unter allen
Verschiebungen invariant, so ist sie konstant und somit auch in einem gewissen Sinne sehr symmetrisch.
Für Drehungen lässt sich ähnliches sagen. Betrachten wir das erzeugende Vektorfeld ξ einer Drehung
im Ortsraum (16.35) und verlangen, dass die Funktion A(r) invariant ist, so ergibt sich die Gleichung
(n × (r − o)) · ∇A(r) = 0,
(16.48)
εijk ni rj ∂k A(r) = 0.
(16.49)
oder in Koordinaten ausgedrückt
Betrachten wir als Spezialfall n = ez , so ergibt sich die Forderung rx ∂y A − ry ∂x Ay = 0, die genau dann
erfüllt ist, wenn A eine Funktion von rz und ρ2 = rx 2 + ry 2 ist. Das bedeutet natürlich nichts anderes als
dass die Funktion rotationssymmetrisch um die z-Achse ist. Verlangt man, dass die Gleichung (16.49) für
alle Richtungen n der Drehachse erfüllt ist, so darf die Funktion A nur von r 2 = rx2 + ry2 + rz2 abhängen.
Sie ist dann bezüglich jeder Achse rotationssymmetrisch, also kugelsymmetrisch.
Aufgabe 16.12 Es sei Q der Konfigurationsraum eines N -Teilchen-Systems, r α,i die Ortskoordinaten der
einzelnen Teilchen, und V eine skalare Funktion auf Q, zum Beispiel das Wechselwirkungspotenzial der
Teilchen. Ein Vektorfeld ξ sei durch die Komponenten ξα,i = ni definiert, wobei ni ein Einheitsvektor
im dreidimensionalen Raum ist. Welchen Fluss erzeugt dieses Vektorfeld? Welche Bedingung muss das
Potenzial V erfüllen, damit es unter dem Fluss invariant ist?
Aufgabe 16.13 Es sei Q der Konfigurationsraum eines N -Teilchen-Systems, r α,i die Ortskoordinaten der
einzelnen Teilchen, und V eine skalare Funktion auf Q, zum Beispiel das Wechselwirkungspotenzial der
Teilchen. Ein Vektorfeld ξ sei durch die Komponenten ξα,i = εijk nj rα,k definiert, wobei ni ein Einheitsvektor im dreidimensionalen Raum ist. Welchen Fluss erzeugt dieses Vektorfeld? Welche Bedingung muss
das Potenzial V erfüllen, damit es unter dem Fluss invariant ist?
174
Hamiltonsche Flüsse
Die bisher gemachten Aussagen über Vektorfelder und Flüsse gelten auf beliebigen affinen Räumen oder
Mannigfaltigkeiten. Nun betrachten wir speziell den Phasenraum P eines mechanischen Systems, auf dem
als eine wichtige Struktur die symplektische Form Ωmn bzw. die inverse symplektische Form Ω mn definiert
ist.
Man kann die inverse symplektische Form verwenden, um jeder Phasenraumfunktion F (x) ein Vektorfeld ξF (x) zuzuordnen. Und zwar setzt man
Hamiltonsches
Vektorfeld
ξFn (x) = Ω mn (x) ∂m F (x).
(16.50)
Dieses Vektorfeld ist das der Funktion F zugeordnete Hamiltonsche Vektorfeld. Der zugehörige Fluss χ F
heißt Hamiltonscher oder kanonischer Fluss von F . Für ihn gilt die Flussgleichung
χ̇Fn (x, τ ) = ξFn (χ(x, τ )) = Ω mn (χ(x, τ )) ∂m F (χ(x, τ )).
(16.51)
Wenn wir für die Funktion F die Hamilton-Funktion H einsetzen, so ist das Hamiltonsche Vektorfeld
ξH (x) gerade die rechte Seite der Bewegungsgleichung (16.24), und der zugehörige Hamiltonsche Fluss
gerade die Zeitentwicklung des Systems.
Man kann daher mit dem Hamiltonschen Fluss einer beliebigen Phasenraumfunktion F folgende anschauliche Vorstellung verbinden. Man stellt sich ein hypothetisches mechanisches System vor, dessen
Phasenraum der Raum P mit derselben symplektischen Form ist, dessen Hamilton-Funktion jedoch F
ist. Der zu F gehörende Hamiltonschen Fluss beschreibt dann die Zeitentwicklung dieses hypothetischen
Systems.
Wir machen uns das an einem einfachen Beispiel klar. Es sei P der zweidimensionale Phasenraum eines
mechanischen Systems mit einem Freiheitsgrad, und (q, p) ein kanonisches Koordinatensystem auf diesem
Raum. Es gilt also {p, q} = −{q, p} = 1, oder äquivalent dazu Ω pq = −Ω qp = 1. Die Hamilton-Funktion
H dieses System ist im folgenden nicht von Belang.
Statt dessen betrachten wir die Funktion F (q, p) = p und stellen uns vor, dies sei die Hamilton-Funktion
eines anderen hypothetischen Systems mit einem Freiheitsgrad. Das zugehörige Hamiltonsche Vektorfeld
ist
ξ q = Ω qq ∂q F + Ω pq ∂p F = 1,
ξ p = Ω qp ∂q F + Ω pp ∂p F = 0.
(16.52)
Offenbar erzeugt dieses konstante Vektorfeld einen Fluss in Richtung der positiven q-Achse. Die Trajektorien dies hypothetischen Systems, dessen Hamilton-Funktion die Funktion F (q, p) = p ist, sind Geraden
in Richtung der q-Achse.
Wir können auch die Funktion F (q, p) = q betrachten und fragen, welchen Hamiltonschen Fluss diese
Funktion erzeugt. In diesem Fall gilt für das Vektorfeld
ξ q = Ω qq ∂q F + Ω pq ∂p F = 0,
ξ p = Ω qp ∂q F + Ω pp ∂p F = −1.
(16.53)
Der zugehörige Fluss ist eine Verschiebung in Richtung der negativen p-Achse. Ein hypothetisches System,
dessen Hamilton-Funktion und damit dessen Energie durch F (q, p) = q gegeben wäre, würde sich also
auf Trajektorien bewegen, auf denen der Ort q konstant ist und der Impuls p linear mit der Zeit abnimmt.
Ein solches mechanisches System ist natürlich nicht sehr realistisch. Aber darauf kommt es bei dieser
Betrachtung nicht an. Es geht nur darum, sich eine anschauliche Vorstellung davon zu machen, was ein
Hamiltonschen Fluss ist. Der im letzten Kapitel eingeführte, durch die reale Hamilton-Funktion H erzeugte Fluss, der die tatsächliche Zeitentwicklung des Systems beschreibt, ist nur ein Spezialfall eines solchen
Flusses.
175
Man kann sich leicht überlegen, dass nicht jeder Fluss auf einem Phasenraum P ein Hamiltonscher Fluss
sein kann. Es gibt nämlich sehr viel mehr Vektorfelder als skalare Funktionen auf P, weil ein Vektorfeld
durch mehrere reelle Koordinatenfunktionen dargestellt wird. Man kann also nicht jedes Vektorfeld in
der Form (16.50) darstellen. Hamiltonsche Flüsse haben aber eine sehr spezielle Eigenschaft, die bei der
Definition von Symmetrien eine wichtige Rolle spielt.
Wir betrachten dazu eine andere Phasenraumfunktion A(x) und die durch den Fluss des Vektorfeldes
ξF erzeugte Transformation dieser Funktion, also die Funktion A(x, τ ), die durch die Flussgleichung
Ȧ(x, τ ) = ξ n (x) ∂n A(x, τ ) = Ω mn (x) ∂m F (x) ∂n A(x, τ )
(16.54)
bestimmt wird und vom Flussparameter τ abhängt. Offenbar können wir die rechte Seite dieser Gleichung
als eine Poisson-Klammer schreiben. Es gilt
Ȧ = {F, A},
(16.55)
wobei wir A auf der linken Seite nach dem Flussparameter τ ableiten, während wir es rechts als Funktion der Phasenraumkoordinaten auffassen, um die Poisson-Klammer zu bilden. Ein kanonischer Fluss
wird lässt sich also durch die Poisson-Klammer beschreiben, ohne dass man zunächst ein erzeugendes
Vektorfeld einführen muss. Wenn wir wieder das Bild eines hypothetischen mechanischen Systems mit
der Hamilton-Funktion F verwenden, ist die Gleichung (16.55) völlig analog zur Bewegungsgleichung
(15.66) zu lesen.
Um zu zeigen, dass wir mit dieser Methode sehr leicht den Hamiltonschen Fluss zu einer gegebenen
Phasenraumfunktion bestimmen können, betrachten wir als etwas anspruchsvolleres Beispiel den Phasenraum P eines N -Teilchen-Systems im Euklidischen Raum, mit kartesischen Ortskoordinaten r α,i und den
dazu konjugierten Impulsen pα,i . Die Phasenraumfunktion sei die Komponente des Gesamtimpulses P in
Richtung eines Einheitsvektors n,
X
X
n·P =
n · pα =
ni pα,i .
(16.56)
α
α
Nun sei A({rα }, {pα }, τ ) eine Phasenraumfunktion, die zusätzlich von einem Flussparameter τ abhängt.
Um den von der Funktion n · P erzeugten Fluss zu bestimmen, bilden wir die Poisson-Klammer
Ȧ = {n · P , A} =
X ∂(n · P ) ∂A
X
∂A ∂(n · P )
∂A
−
=
ni
.
∂pα,i ∂rα,i ∂pα,i ∂rα,i
∂rα,i
α
α
(16.57)
Die Lösung dieser Gleichung lässt sich leicht angeben. Es ist
A({rα }, {pα }, τ ) = A({rα + τ n}, {pα }).
(16.58)
Offenbar ist dies eine Transformation, bei der gleichzeitig alle Orte der Teilchen um einen Vektor τ n
im Raum verschoben werden. Ein hypothetisches System, dessen Hamilton-Funktion n · P wäre, würde
folgende Bewegung ausführen. Die Impulse der Teilchen wären konstant und hätten keinen Einfluss auf
die Bewegung im Ortsraum. Dort würden sich alle Teilchen mit der Geschwindigkeit Eins in Richtung des
Vektors n bewegen. Ihre relativen Positionen blieben dabei erhalten.
Es ist offensichtlich, dass dies ein sehr unrealistisches physikalisches System ist. Aber man kann sich
so sehr gut den von der Funktion n · P erzeugten Fluss veranschaulichen. Man drückt diesen Sachverhalt
oft etwas verkürzt wie folgt aus:
Der Gesamtimpuls eines mechanischen System ist der Erzeuger einer Verschiebung im Ortsraum.
176
Analog zu Aufgabe 16.12 kann man feststellen, dass eine Phasenraumfunktion A genau dann unter dem
Hamiltonschen Fluss von n · P für alle Richtungen n invariant ist, wenn sie nur von den Impulsen p α und
den relativen Positionen rα − rβ der Teilchen abhängt. Hat die reale Hamilton-Funktion H diese Eigenschaft, so hängt die Energie des N -Teilchen-Systems nur von diesen Größen ab. Das ist typischerweise für
Systeme ohne äußere Kräfte der Fall.
Aufgabe 16.14 Man zeige entsprechend, dass durch die Phasenraumfunktion
X
X
n·L =
n · (rα × pα ) =
εijk ni rα,j pα,k ,
α
(16.59)
α
also durch die Komponente des Gesamtdrehimpulses, eine simultane Rotation aller Teilchen um den Ursprung erzeugt wird, wobei die Drehachse durch den Vektor n vorgegeben ist. Wie sieht hier die hypothetische Bewegung der Teilchen aus? Warum ändern sich dabei auch die Impulse?
Auch dies lässt sich wieder in einem Satz zusammenfassen:
Der Gesamtdrehimpuls eines mechanischen System ist der Erzeuger einer Drehung im Ortsraum.
Die typischen Symmetrien von mechanischen Systemen, die aus N frei im Raum beweglichen Teilchen
bestehen, und die wir schon in Kapitel 3 ausführlich untersucht haben, lassen sich also im Rahmen der Hamiltonschen Mechanik als Flüsse auf dem Phasenraum darstellen, die von speziellen Funktionen erzeugt
werden.
Etwas allgemeiner formuliert sehen wir, dass die kanonischen Flüsse, die von von bestimmten Phasenraumfunktionen erzeugt werden, etwas mit den Symmetrien eines System zu tun haben. Das hat auch einen
Grund. Die kanonischen oder Hamiltonschen Flüsse haben nämlich eine spezielle Eigenschaft, die Flüsse
im allgemeinen nicht haben.
Diese spezielle Eigenschaft von Hamiltonschen Flüssen ist, dass die Poisson-Klammer unter solchen
Flüssen invariant ist. Damit ist folgendes gemeint. Es seien A, B und C drei Phasenraumfunktionen, so
dass {A, B} = C gilt. Nun transformieren wir diese Funktionen unter dem Fluss einer Funktion F . Dann
hängen A, B und C von einem Flussparameter τ ab, und es gilt
Ȧ = {F, A},
Ḃ = {F, B},
Ċ = {F, C},
(16.60)
wobei sich für τ = 0 die ursprünglichen Funktionen ergeben. Wir wollen zeigen, dass die Beziehung
{A, B} = C dann für alle τ gilt, das heißt zwischen den transformierten Funktionen gilt die gleiche
Beziehung wie zwischen den ursprünglichen Funktionen für τ = 0.
Um den Beweis zu führen, definieren wir eine Funktion G = C − {A, B}, die dann ebenfalls von τ
abhängt, und berechnen deren Ableitung nach τ . Es ist
Ġ = Ċ − {Ȧ, B} − {A, Ḃ} = {F, C} − {{F, A}, B} − {A, {F, B}}.
(16.61)
Nun setzen wir G + {A, B} für C ein, und benutzen die Antisymmetrie und die Jacobi-Identität (15.74)
für die Poisson-Klammer. Das ergibt
Ġ = {F, G} + {F, {A, B}} + {B, {F, A}} + {A, {B, F }} = {F, G}.
(16.62)
Nun ist aber nach Voraussetzung G = 0 für τ = 0 und damit wird diese Flussgleichung durch G = 0 für
alle τ ∈ R eindeutig gelöst. Also gilt für alle τ ∈ R die Beziehung {A, B} = C.
Unter einem Hamiltonschen Fluss ist die Poisson-Klammer invariant.
177
Auch das ist wieder eine etwas verkürzte Formulierung, die man genauer interpretieren muss. Gemeint ist
damit, dass jeder Beziehung zwischen Phasenraumfunktionen, die man mit Hilfe der Poisson-Klammer
ausdrücken kann, unter einem Hamiltonschen Fluss erhalten bleibt.
Für das oben dargestellte Beispiel eines N -Teilchen-Systems bedeutet das, dass die Poisson-Klammern
von Funktionen unter Drehungen und Verschiebungen invariant sind. Darin drückt sich eine wesentliche
Symmetrie von mechanischen Systemen von Punktteilchen aus, die mit der eigentlichen Dynamik noch
gar nichts zu tun hat. Denn wir haben die Hamilton-Funktion bisher noch gar nicht in die Betrachtungen
einbezogen.
Invarianz der Poisson-Klammer
Wir wollen nun zeigen, dass auch die Umkehrung des letzten Satzes gilt. Wenn die Poisson-Klammer unter
einem gegebenen Fluss invariant ist, dann handelt es sich um den Hamiltonschen Fluss einer Phasenraumfunktion. Dieser Beweis ist ein wenig komplizierter und trickreicher. Wir müssen dazu auf das erzeugende
Vektorfeld und die symplektische Struktur zurückgreifen.
Es sei also ξ m die Darstellung eines Vektorfeld auf einem Phasenraum P, und Ω mn bzw. Ω mn die
Darstellung der symplektischen Form in einem Koordinatensystem {x m }. Wie oben betrachten wir drei
Funktionen A(x), B(x) und C(x) mit {A, B} = C, also
C(x) = Ω mn (x) ∂m A(x) ∂n B(x).
(16.63)
Nun lassen wir diese Funktionen fließen, das heißt wir betrachten die Funktionen A(x, τ ), B(x, τ ) und
C(x, τ ), definiert durch die Flussgleichungen
Ȧ(x, τ ) = ξ k (x) ∂k A(x, τ ),
Ḃ(x, τ ) = ξ k (x) ∂k B(x, τ ),
Ċ(x, τ ) = ξ k (x) ∂k C(x, τ ).
(16.64)
Wir verlangen nun, dass auch für diese Funktionen die Beziehung {A, B} = C gilt. Daraus leiten wir eine
Bedingung an das Vektorfeld ξ µ ab. Es soll also für alle τ ∈ R gelten
C(x, τ ) = Ω mn (x) ∂m A(x, τ ) ∂n B(x, τ ).
(16.65)
Wir leiten beide Seiten nach τ ab und setzen (16.64) ein. Das ergibt
ξ k ∂k C = Ω mn ∂m ξ k ∂k A ∂n B + Ω mn ∂m A ∂n ξ k ∂k B .
(16.66)
Die rechte Seite der Gleichung (16.66) lässt sich wie folgt umformen,
Ω mn ∂m ξ k ∂k A ∂n B + ∂n ξ k ∂m A ∂k B + Ω mn ξ k ∂k ∂m A ∂n B .
(16.68)
Um die Darstellung ein wenig abzukürzen, lassen wir die Argumente x und τ weg. Wir müssen jedoch
beachten, dass alle vorkommenden Größen von x abhängen, und A, B und C zusätzlich von τ .
Wir werten nun die linke Seite der Gleichung (16.66) aus, indem wir für C wieder (16.65) einsetzen.
Das ergibt
ξ k ∂k Ω mn ∂m A ∂n B = ξ k ∂k Ω mn ∂m A ∂n B + Ω mn ξ k ∂k ∂m A ∂n B .
(16.67)
Durch Umbenennen von Indizes, über die summiert wird, können wir das auch wie folgt schreiben,
Ω kn ∂k ξ m ∂m A ∂n B + Ω mk ∂k ξ n ∂m A ∂n B + Ω mn ξ k ∂k ∂m A ∂n B .
(16.69)
178
Nun verlangen wir, dass (16.67) und (16.69) gleich sind, und zwar für alle Funktionen A und B. Genau
dann ist nämlich die Poisson-Klammer unter dem Fluss des Vektorfeldes ξ m invariant. Das führt auf die
Bedingung
ξ k ∂k Ω mn − Ω kn ∂k ξ m − Ω mk ∂k ξ n = 0,
(16.70)
die als Forderung an das Vektorfeld ξ m zu verstehen ist. Das ist zunächst eine unübersichtliche Kombination von partiellen Ableitungen. Sie lässt sich jedoch noch vereinfachen. Wir multiplizieren die Gleichung
dazu mit Ωpm uns Ωnq und bekommen die äquivalente Bedingung
ξ k Ωpm ∂k Ω mn Ωnq − Ωpm ∂q ξ m − Ω nq ∂p ξ n = 0
(16.71)
Dabei haben wir benutzt, dass Ωpm bzw. Ωnq jeweils zu Ω mn inverse Matrizen sind. Daraus folgt auch
Ωpm ∂k Ω mn Ωnq = ∂k (Ωpm Ω mn ) Ωnq − ∂k Ωpm Ω mn Ωnq = ∂k Ωpq .
(16.72)
Durch nochmaliges Umbenennen von Indizes lautet die an das Vektorfeld ξ m zu stellende Bedingung nun
ξ m ∂m Ωpq − Ωpm ∂q ξ m − Ω nq ∂p ξ n = 0
(16.73)
Nun verwenden wir noch die Identität (16.20), also das Verschwinden der zyklischen Ableitung von der
symplektischen Form. Damit lässt sich die Bedingung schließlich wie folgt schreiben,
∂q (Ωpm ξ m ) − ∂p (Ωqm ξ m ) = 0.
(16.74)
Nach dieser etwas mühsameren Rechnung sehen wir, dass diese Bedingung für Hamiltonsche Vektorfelder
tatsächlich erfüllt ist. Setzen wir nämlich ξ m = Ω km ∂k F für eine beliebige Funktion F , so ist Ωpm ξ m =
−∂p F und entsprechend Ωqm ξ m = ∂q F , und folglich ∂q ∂p F − ∂p ∂q F = 0.
Nun müssen wir aber umgekehrt zeigen, dass jedes Vektorfeld ξ m , das die Gleichung (16.74) erfüllt,
ein Hamiltonsches Vektorfeld ist. Wir betrachten dazu das duale Vektorfeld ζ m = ξ n Ωnm , das offenbar die
Eigenschaft
∂ m ζn − ∂ n ζm = 0
(16.75)
hat. Wenn wir zeigen können, dass es eine Phasenraumfunktion F gibt mit ∂ m F = ζm , dann sind wir
fertig. Es gilt dann nämlich Ω mn ∂m F = ζm Ω mn = ξ p Ωpm Ω mn = ξ n .
Wir müssen also folgenden allgemeinen Satz beweisen. Wenn die antisymmetrisierte Ableitung eines
dualen Vektorfeldes verschwindet, dass ist das duale Vektorfeld der Gradient eines skalaren Funktion.
Um den Beweis zu motivieren, erinnern wir uns an eine schon vor langer Zeit im Zusammenhang mit
Vektorfeldern im dreidimensionalen Raum gestellte Frage. Wann ist ein Vektorfeld, oder hier sollten wir
besser sagen ein duales Vektorfeld, der Gradient eines skalaren Feldes? Die Antwort in Kapitel 7 war:
genau dann, wenn die Rotation des Vektorfeldes verschwindet.
Tatsächlich ist die antisymmetrisierte Ableitung ∂m ζn −∂n ζm eines dualen Vektorfeldes ζm eine Verallgemeinerung der Rotation. Man kann diese Ableitung auf jeder Mannigfaltigkeit bilden, ohne dafür eine
Metrik oder einen antisymmetrischen Einheitstensor zu benötigen. Das wurde sogar in Aufgabe 13.25
schon gezeigt. Im Gegensatz zu den einzelnen Summanden ist die antisymmetrische Kombination der
Ableitungen wieder ein Tensor.
Dass die antisymmetrisierte Ableitung verschwindet, wenn ζm = ∂m F ist, ist sofort offensichtlich. Wir
müssen aber die Umkehrung dieser Aussage beweisen. Der Beweis ist völlig analog zu dem in Kapitel 7.
Wir legen zunächst irgendeinen Punkt x0 ∈ P fest. Dann betrachten wir eine Kurve λ(s) ∈ P, mit
0 ≤ s ≤ 1. Den Anfangspunkt der Kurve legen wir bei λ(0) = x0 fest, und der Endpunkt λ(1) = x sei
variabel. Dann bilden wir das Wegintegral
F [λ] =
Z
0
1
ds λ0 (s) · ζ(λ(s)).
179
(16.76)
Wir bilden das Produkt des Tangentenvektors der Kurve mit dem dualen Vektorfeld ζ, ausgewertet entlang
der Kurve, und integrieren über die Kurve. Das Ergebnis betrachten wir als Funktional der Kurve λ.
Was wir nun zeigen werden ist, dass das Funktional F gar nicht von der Kurve abhängt, sondern nur
von ihrem Endpunkt x. Mit anderen Worten, das Funktional ändert seinen Wert nicht, wenn wir die Kurve
beliebig verformen oder reparametrisieren, solange wir nur die Endpunkte festhalten. Oder noch ein wenig
anderes formuliert, die Variation δF [λ] des Funktionals F [λ] verschwindet für alle Variationen δλ der
Kurve, solange wir die Endpunkte festhalten. Es ist überall im Raum aller Kurven stationär.
Den Beweis können wir mit den uns nun zur Verfügung stehenden Mitteln aus der Variationsrechnung
leicht führen. Wir schreiben den Integranden zunächst in Komponenten aus,
F [λ] =
Z
1
ds λ0n (s) ζn (λ(s)),
(16.77)
0
und führen dann eine Variation aus,
δF [λ] =
Z
0
1
ds δλ0n (s) ζn (λ(s)) + λ0n (s) δζn (λ(s)) .
(16.78)
Den ersten Summanden formen wir durch eine partielle Integration um, für den zweiten benutzen wie die
Kettenregel, wonach
δζn (λ(s)) = δλm (s) ∂m ζn (λ(s))
(16.79)
gilt. Unter Berücksichtigung der entsprechenden Randterme ergibt sich
h
i1
n
δF [λ] = δλ (s)ζn (λ(s)) −
0
−
Z
0
1
ds δλn (s) λ0m (s) ∂m ζn (λ(s)) − λ0n (s) δλm (s) ∂m ζn (λ(s)) .
(16.80)
Wenn man nun die Indizes noch umbenennt und die Terme ein wenig sortiert, und außerdem den Anfangspunkt λ(0) = x0 festhält, bekommt man
n
δF [λ] = δx ζn (x) −
Z
0
1
ds δλn (s) λ0m ∂m ζn (λ(s)) + ∂n ζm (λ(s)) .
(16.81)
Nach Voraussetzung verschwindet aber die antisymmetrisierte Ableitung, das heißt es bliebt nur
δF [λ] = δx · ζ(x),
(16.82)
wobei x = λ(1) der Endpunkt der Kurve ist. Daraus ziehen wir zwei Schlussfolgerungen. Erstens hängt
der Wert des Funktionals F [λ] nur vom Endpunkt x ab, es definiert also eine gewöhnliche Funktionen
F (x). Zweitens ist ∇F = ζ, denn genau das ist die Aussage der Gleichung (16.82).
Also haben wir eine skalare Funktion F (x) gefunden, deren Gradient das gegebene Vektorfeld ζ ist.
Und damit haben wir auch die Aussage bewiesen, wonach jeder Fluss, unter dem die Poisson-Klammer
invariant ist, ein Hamiltonscher Fluss ist, der von einer Phasenraumfunktion erzeugt wird. Da wir den Anfangspunkt der betrachteten Kurven beliebig wählen können, ist diese Funktion nur bis auf eine Konstante
bestimmt. Das ist auch klar, denn die Addition einer Konstanten zu einer Phasenraumfunktion ändert den
von ihr erzeugten Fluss nicht.
180
Allerdings gibt es im Beweis eine kleine Lücke. Wir haben nämlich nur gezeigt, dass sich der Wert des
Wegintegrals nicht ändert, wenn wir die Kurve verformen. Aber was passiert, wenn es mehrere Kurven
gibt, die den Vorgegeben Anfangspunkt x0 mit dem Endpunkt verbinden, diese aber nicht durch eine
Verformung ineinander überführbar sind? Eine solche Situation ist sehr leicht vorstellbar, und wir kennen
sogar schon ein Beispiel für einen Phasenraum, in dem genau das passiert.
Das ist der zylinderförmige Phasenraum eines Pendels, bei dem die Auslenkung q eine periodische
Koordinaten mit q ≡ q + 2π` ist, während der konjugierte Impuls p eine gewöhnliche reelle Koordinate
ist. Betrachten wir als Beispiel den durch das Vektorfeld
ξ q = 0,
ξp = 1
(16.83)
erzeugten Fluss, also eine Verschiebung in Richtung der p-Achse. Die Poisson-Klammer ist unter diesem
Fluss invariant, wie man leicht durch Nachrechnen bestätigt. Mit der symplektischen Form Ω qp = 1 und
Ωpq ergibt sich für das oben definierte duale Vektorfeld
ζq = −1,
ζp = 0.
(16.84)
Offenbar gilt hier ∂m ζn − ∂n ζm = 0. Aber ist ζm = ∂m F der Gradient einer skalaren Funktionen. Anscheinend schon, wenn wir F = −q setzen. Das ist aber gar keine wohldefinierte Funktion auf dem Phasenraum,
denn die Koordinate q ist periodisch und somit als Funktion nicht wohldefiniert.
Wie man sich leicht überlegt, ergibt sich dieses Problem aus der Tatsache, dass sich zwei Kurven auf einem Zylinder, die den gleichen Anfangs- und Endpunkt haben, nicht immer stetig ineinander deformieren
lassen. Daher funktioniert der Beweis in diesem Fall nicht. Er ist nur dann richtig, wenn der Phasenraum
P einfach zusammenhängend ist. Das bedeutet, dass jede Kurve in jede andere stetig deformiert werden
kann, wenn Anfangs- und Endpunkt übereinstimmen. Auf einem Zylinder ist das nicht der Fall, wohl aber
zum Beispiel auf jedem affinen Raum.
Die Schlussfolgerung, die wir über Hamiltonschen Flüsse ziehen können, muss also etwas eingeschränkt
lauten:
Ist der Phasenraum einfach zusammenhängend, so wird jeder Fluss, unter dem die PoissonKlammer invariant ist, von einer Phasenraumfunktion erzeugt.
Aufgabe 16.15 Das bedeutet natürlich nicht, dass der Satz auf einem nicht einfach zusammenh ängenden
Phasenraum gänzlich falsch wäre. Es ist nur so, dass nicht zu jedem entsprechenden Fluss eine Phasenraumfunktion gefunden werden kann. Betrachtet man statt dessen eine Verschiebung in Richtung q als
Fluss auf dem Phasenraum des Pendels, so findet man sehr wohl eine Phasenraumfunktion, die diesen
Fluss erzeugt. Welche ist das?
Aufgabe 16.16 Es sei ζm ein dualen Vektorfeld auf einer Mannigfaltigkeit und es gelte ∂m ζn − ∂n ζm =
0. Man zeige, dass ζm = ∂m F genau dann der Gradient einer skalaren Funktion F ist, wenn f ür jede
geschlossene Kurve das Wegintegral von ζm entlang der Kurve verschwindet, und dass es genügt, dies für
endlich viele Kurven zu überprüfen.
Das Noether-Theorem
Zum Abschluss dieser ganzen Vorüberlegungen beweisen wir nun das Noether-Theorem. Wie schon eingangs erwähnt, handelt es sich um eine der wichtigesten und allgemeinsten Aussagen über Hamiltonsche
Systeme. Seine Bedeutung geht weit über die klassische Mechanik hinaus. Verallgemeinerte Versionen
dieses Satzes gelten auch in der Quantenmechanik, in der klassischen Feldtheorie, etwa der Maxwellschen Elektrodynamik, und in der Quantenfeldtheorie, also der Theorie der Elementarteilchen. Dort spielen Symmetrien eine sehr bedeutende Rolle, und zwar im wesentlichen wegen der Gültigkeit des NoetherTheorems.
Die Aussage des Theorems lässt sich sehr knapp zusammenfassen:
181
Zu jeder Symmetrie eines Hamiltonschen Systems gehört eine Erhaltungsgr öße.
Zuerst müssen wir erklären, was wir unter einer Symmetrie verstehen. Zum Teil haben wir dies schon
getan. So hatten wir zum Beispiel festgestellt, dass eine Funktion unter dem Fluss eines Vektorfeldes
invariant ist, wenn ihre Richtungsableitung in Richtung des Vektorfeldes überall verschwindet. In dieser
Tatsache drückt sich eine bestimmte Symmetrie der Funktion aus, etwa eine Rotationssymmetrie, wenn
der Fluss eine Drehung beschreibt.
Darüber hinaus haben wir im letzten Abschnitt gezeigt, dass es auf einem Phasenraum spezielle Flüsse
gibt, unter denen die Poisson-Klammer invariant ist. Auch die Poisson-Klammer als eine geometrische
Struktur auf dem Phasenraum hat also bestimmte Symmetrien. Sie ist unter allen Transformationen invariant, die sich als Hamiltonsche Flüsse darstellen lassen.
Um zu erklären, was eine Symmetrie eines mechanischen Systems ist, müssen wir diese beiden Begriffe
nur noch miteinander kombinieren. Die Dynamik eines mechanischen Systems wird durch seine HamiltonFunktion H und die Poisson-Klammer {, }, oder äquivalent dazu die symplektische Form beschrieben.
Beides sind geometrische Strukturen auf dem Phasenraum P. Ein Symmetrie des Systems ist ein Fluss
χ : P × R → P, der beide Strukturen invariant lässt.
Hängt zum Beispiel die Hamilton-Funktion eines N -Teilchen-Systems nur von den relativen Positionen
der Teilchen ab, so ist sowohl die Poisson-Klammer unter Verschiebungen im Raum invariant, wie wir weiter ober allgemein gezeigt haben, als auch die Hamilton-Funktion. Denn sie hängt in diesem Fall nur von
den Impulsen und den relativen Positionen der Teilchen ab, und diese ändern sich bei einer Verschiebung
nicht.
Entsprechend sind sowohl die Poisson-Klammer also auch die Hamilton-Funktion unter Drehungen des
Raumes invariant, wenn die Wechselwirkungspotenziale der Teilchen nur von deren Abständen abhängen.
Denn die kinetischen Energien der einzelnen Teilchen hängen nur von den Beträgen der Impulse ab, die
sich bei einer Drehung nicht ändern, und die Abstände der Teilchen voneinander sind bei einer Drehung
natürlich auch invariant. In den beiden beschriebenen Fällen sind die Verschiebungen bzw. Drehungen also
Symmetrien des Phasenraumes.
Doch kommen wir nun zum Beweis des Noether-Theorems. Wir nehmen also an, dass wir einen Fluss
χ : P × R → P gegeben haben, unter dem sowohl die Poisson-Klammer als auch die Hamilton-Funktion
invariant ist. Aus der ersten Voraussetzung folgt, wie wir weiter oben gezeigt haben, dass es sich um
einen Hamiltonschen Fluss handelt. Er wird von einer Phasenraumfunktion F erzeugt, und das erzeugende
Vektorfeld ist durch
ξ n = Ω mn ∂m F
(16.85)
gegeben. Wir nehmen dabei der Einfachheit halber an, dass der Phasenraum einfach zusammenhängend
ist. Ansonsten ist die Funktion F möglicherweise nicht überall wohldefiniert.
Die zweite Voraussetzung besagt, dass die Hamilton-Funktion unter dem Fluss dieses Vektorfeldes invariant ist, also ihre Richtungsableitung verschwindet,
ξ n ∂n H = Ω mn ∂m F ∂n H = {F, H} = 0.
(16.86)
Damit haben wir den Beweis bereits erbracht. Die Poisson-Klammer von F mit H ist Null, also ist F eine
Erhaltungsgröße. Sie ist durch die Symmetrie, die sie als Fluss erzeugt, bis auf eine Konstante bestimmt.
Dass der Beweis so einfach ist, beruht auf den umfangreichen Vorarbeiten, und auf einer speziellen Dualität der Hamiltonschen Bewegungsgleichungen. Betrachten wir nämlich die im vorigen Kapitel hergeleitete Bedingung, dass eine Phasenraumfunktion F genau dann eine Erhaltungsgröße ist, wenn {H, F } = 0
ist, so fällt auf, dass diese Bedingung in einer speziellen Art und Weise in H und F “symmetrisch” ist.
Wir können die Rollen der beiden Funktionen H und F vertauschen, ohne den Inhalt der Aussage zu
verändern.
182
replacements
y
y
y
L
J
S
(d)
x
x
(b)
(a)
x
(c)
Abbildung 16.3: Verschiedene Versionen des Drehimpulses erzeugen verschiedenen Flüsse. Der Gesamtdrehimpuls L erzeugt eine Drehung des Systems als ganzes um den Ursprung (a). Der Schwerpunktdrehimpuls J rotiert den Schwerpunkt um den Ursprung, verändert aber nicht die relativen Positionen der
Teilchen (b). Der innere Drehimpuls S erzeugt eine Drehung der Teilchen um den Schwerpunkt.
Es ist genau diese, auf den ersten Blick etwas merkwürdige Beobachtung, die in einem gewissen Sinne
eine tiefere Begründung des Noether-Theorems liefert. Um uns das klar zu machen, schreiben wir statt
F H0 , und denken uns diese Funktion als die Hamilton-Funktionen eines anderen, hypothetischen mechanischen Systems. Es kommt nicht darauf an, ob sich ein solches System tatsächlich realisieren lässt.
Entscheidend ist nur, dass es denselben Phasenraum besitzt wie das reale System, dessen Bewegungen
durch die Hamilton-Funktion H beschrieben werden.
Zunächst sei H0 irgendeine Phasenraumfunktion. Dann können wir die dadurch erzeugten Bewegungsgleichungen des hypothetischen Systems betrachten. Nehmen wir an, dass die daraus abgeleiteten Trajektorien die Eigenschaft haben, dass die Funktion H auf ihnen konstant ist. Dann würden wir sagen, dass H
eine Erhaltungsgröße des hypothetischen Systems ist.
Wir können diese Aussage aber auch anders interpretieren. Wir können die Zeitentwicklung des hypothetischen Systems als einen Fluss auf den Phasenraum betrachten, der die Hamilton-Funktion H des
realen Systems invariant lässt. Es handelt sich also um eine Symmetrie des realen Systems. Zu jeder Symmetrie des realen Systems gehört daher ein hypothetisches Systems, beschreiben durch eine hypothetische
Hamilton-Funktion H0 , so dass H für dieses hypothetische System eine Erhaltungsgröße ist.
Das Noether-Theorem beruht nun auf der Tatsache, dass die Funktion H genau dann eine Erhaltungsgröße des hypothetischen Systems ist, wenn die Funktion H 0 eine Erhaltungsgröße des realen Systems ist,
denn in beiden Fällen lautet die Forderung {H, H 0 } = 0. Das Noether-Theorem beruht also auf einer sehr
eigentümlichen Struktur des Phasenraumes, die sich letztlich aus der Tatsache ergibt, dass die HamiltonFunktion, die die Zeitentwicklung erzeugt, nur eine unter vielen möglichen Phasenraumfunktionen ist.
Aufgabe 16.17 Folgende Aussage ist nun leicht als Spezialfall des Noether-Theorems zu beweisen. Es sei
P der Phasenraum eines N -Teilchen-Systems im dreidimensionalen, Euklidischen Raum. Die HamiltonFunktion H hänge nur von den Impulsen und den relativen Positionen der Teilchen ab. Dann ist der
Gesamtimpuls P eine Erhaltungsgröße.
Aufgabe 16.18 In Kapitel 3 hatten wir für ein N -Teilchen-System im dreidimensionalen Raum drei verschiedene Definitionen des Drehimpulses eingeführt. Den Gesamtdrehimpuls
X
L=
(rα − o) × pα ,
(16.87)
α
183
hatten wir bereits weiter oben als den Erzeuger von Drehungen um den Ursprung o des Koordinatensystems ausgemacht. der Schwerpunktdrehimpuls war durch
.X
X
X
J = (R − o) × P , mit P =
pα , R =
mα r α
mα ,
(16.88)
α
α
α
als der Drehimpuls eines hypothetischen Teilchens im Schwerpunkt des Systems definiert. Beide h ängen
vom gewählten Koordinatenursprung o ab. Der innere Drehimpuls
S =L−J
(16.89)
ist dagegen vom Koordinatenursprung unabhängig. Man bestimme die von diesen Phasenraumfunktionen erzeugten Flüsse, die in Abbildung 16.3 schematisch dargestellt sind. Welche Bedingungen muss die
Hamilton-Funktion erfüllen, damit es sich um Erhaltungsgrößen handelt?
184
17 Der starre Körper
Unter einem starren Körper verstehen wir ein ausgedehntes Objekt, das sich frei im Raum bewegen und
drehen kann, seine Form dabei aber nicht verändert. Etwas genauer formuliert, die Verteilung der Masse
im Innern des Körpers soll sich zeitlich nicht verändern. Von der Mechanik der Punktteilchen ausgehend,
können wir uns vorstellen, dass es sich dabei um ein System von vielen Teilchen handelt, deren Abstände
zueinander durch Zwangskräfte festgehalten werden.
Als einfachstes Beispiel für einen solchen idealisierten starren Körper kennen wir bereits die Hantel aus
Abbildung 5.3. Wir können uns also vorstellen, dass die einzelnen Teilchen durch ‘virtuelle Stangen’ zusammengehalten werden, die den Abstand von jeweils zwei Teilchen fixieren. Die einzigen verbleibenden
Bewegungen sind dann eine Verschiebung des ganzen Körpers im Raum, oder die Drehung des Körpers
um eine Achse.
Das Ziel dieses Kapitels ist es, die Bewegungsgleichungen für einen starren Körper aufzustellen und
seine wichtigsten mechanischen Eigenschaften zu verstehen.
Geschwindigkeit und Winkelgeschwindigkeit
Um den Ort festzulegen, an dem sich ein starrer Körpers im Raum befindet, denken wir uns einen speziell
ausgewählten Punkt in dem Körper als Bezugspunkt markiert. Wie wir gleich sehen werden, vereinfachen
sich die meisten Gleichungen erheblich, wenn wir den Schwerpunkt als Bezugspunkt verwenden. Wir
legen uns aber an dieser Stelle noch nicht fest. Den Ort, an dem sich der Bezugspunkt zur Zeit t im Raum
befindet, bezeichnen wir mit r(t).
Zusätzlich müssen wir noch die genaue Lage des Körpers im Raum festlegen. Dazu denken wir uns
zusätzlich zum Bezugspunkt noch drei orthogonale Einheitsvektoren an den Körper angeheftet. Wie in
Abbildung 17.1(a) gezeigt, bezeichnen wir diese Vektoren mit n a , wobei der Index a die Werte {1, 2, 3}
annimmt. Sie sollen eine positiv orientierte Orthonormalbasis bilden. Es gilt also
na · nb = δab ,
na × nb = εabc nc .
(17.1)
Für die Vektorindizes a, b, c, . . . gelten die üblichen Regeln. Über doppelt vorkommende Indizes ist jeweils
zu summieren, mit δab wird das Kronecker-Symbol bezeichnet, und mit εabc das Levi-Civita-Symbol, dessen Vorzeichen durch ε123 = 1 festgelegt ist.
Wenn sich der Körper bewegt, so sind im allgemeinen auch die Vektoren n a Funktionen der Zeit. Umgekehrt bestimmen diese Vektoren die Lage des Körpers eindeutig, so dass wir aus den Funktionen n a (t)
die Rotationsbewegung des Körpers ablesen können. Daraus ergibt sich die folgende Beschreibung der
Bewegung eines starren Körpers im Raum:
Die Bahn eines starren Körpers wird durch die Angabe des Ortes r(t) des körperfesten Bezugspunktes sowie der körperfesten Basis na (t) zu jedem Zeitpunkt beschrieben.
Damit haben wir ein Beschreibung des Konfigurationsraumes eines starren Körpers angegeben. Um die
Bewegungsgleichungen aufzustellen, müssen wir die zeitlichen Änderungen dieser Größen betrachten.
Unter der Geschwindigkeit v(t) des Körpers verstehen wir einfach die Zeitableitung von r(t), also die
Geschwindigkeit des Bezugspunktes,
v(t) = ṙ(t).
(17.2)
Um die Ableitung der Basis na nach der Zeit zu berechnen, müssen wir beachten, dass es sich zu jeden
Zeitpunkt um eine Orthonormalbasis handelt. Die Gleichung (17.1) gilt zu jeder Zeit t. Folglich gilt für
die Ableitungen der Basisvektoren na nach der Zeit
na · ṅb + ṅa · nb = 0.
185
(17.3)
replacements
(c)
(d)
z
z
ω
n1
n3
ez
ṅ3
ṅ1
y
y
ṅ2
n2
ey
x
ex
x
(b)
(a)
Abbildung 17.1: Die Lage eines starren Körpers im Raum wird durch die Angabe einer Orthonormalbasis
na definiert, die fest mit dem Körper verbunden ist (a). Rotiert der Körper, so ist deren Zeitableitung ṅa
durch das Kreuzprodukt mit der Winkelgeschwindigkeit ω gegeben (b).
Das ergibt sich unmittelbar aus (17.1), wenn man beide Seiten nach der Zeit ableitet. Wir wollen zeigen,
dass es einen eindeutig bestimmten Vektor ω gibt, mit der Eigenschaft
ṅa = ω × na .
(17.4)
Der Vektor ω, der im allgemeinen natürlich auch von der Zeit abhängt, wird als Winkelgeschwindigkeit
bezeichnet. Die Zeitableitungen ṅa der Basisvektoren stehen senkrecht zu den jeweiligen Basisvektoren
und zur Winkelgeschwindigkeit. Wie man in Abbildung 17.1(b) erkennen kann, führt der Körper eine
Rechtsdrehung um eine Achse aus, die in die Richtung von ω zeigt.
Wir beweisen zuerst, dass der Vektor ω durch (17.4) eindeutig bestimmt ist. Dazu multiplizieren wir
diese Gleichung skalar mit εabc nb , wobei dann über a und b zu summieren ist. Das ergibt
εabc ṅa · nb = εabc (ω × na ) · nb = εabc (na × nb ) · ω
= εabc εabd nd · ω = εabc εabd ωd = 2 ωc .
(17.5)
Hier haben wir zuerst die zyklische Eigenschaft des Spatproduktes verwendet, dann das Kreuzprodukt der
Basisvektoren ausgewertet, und schließlich haben wir benutzt, dass die Vektoren n a eine Orthonormalbasis
bilden, und den Vektor ω bezüglich dieser Basis in seine Komponenten zerlegt. Es folgt somit aus (17.4)
ω = ω a na ,
mit ωa = ω · na =
1
εabc ṅb · nc .
2
(17.6)
Nun müssen wir noch zeigen, dass dieser Vektor auch tatsächlich die Gleichung (17.4) erfüllt. Einsetzen
ergibt
1
1
ω × nd = ωa na × nd = εabc (ṅb · nc ) na × nd = εabc εade (ṅb · nc ) ne
2
2
1
1
(17.7)
= (δbd δce − δbe δcd ) (ṅb · nc ) ne = (ṅd · ne − ṅe · nd ) ne .
2
2
186
Addieren wir zu dem Ausdruck in der Klammer die Hälfte der linken Seite von (17.3), so ergibt sich
ω × nd = (ṅd · ne ) ne = ṅd .
(17.8)
Die letzte Gleichung folgt wieder aus der Tatsache, dass die Vektoren n e eine Orthonormalbasis bilden.
Das Ergebnis fassen wir wie folgt zusammen:
Der Bewegungszustand eines starren Körpers wird durch den Ort r und die Geschwindigkeit
v des Bezugspunktes, sowie die Orthonormalbasis na und die Winkelgeschwindigkeit ω
festgelegt.
Wie wir aus der Mechanik der Punktteilchen wissen, legen die Bewegungsgleichung die zeitliche Entwicklung eines Systems fest, sobald wir den Bewegungszustand, also die Orte und Geschwindigkeiten
aller Teilchen, zu einem Zeitpunkt kennen. Wir werden jetzt zeigen, dass es sich bei den angegebenen
Größen um die entsprechenden Bewegungsgrößen eines starren Körpers handelt.
Aufgabe 17.1 Wieviele unabhängige reelle Zahlen muss man festlegen, um den Bewegungszustand eines
starren Körpers eindeutig zu bestimmen?
Das körperfeste Koordinatensystem
Im folgenden ist es nützlich, sich den starren Körper als ein System von Punktteilchen vorzustellen. Die
Teilchen sollen durch Zwangskräfte so aneinander gebunden sein, dass sich der Körper als ganzes frei
bewegen, aber seine Form dabei nicht verändern kann. Konkret können wir uns vorstellen, dass zwischen
jeweils zwei Teilchen eine Zwangskraft wirkt, die den Abstand der beiden Teilchen fixiert. Als einfachstes
Beispiel für einen solchen idealisierten starren Körper hatten bereits die Hantel in Abbildung 5.3 kennen
gelernt. Ein etwas anspruchsvolleres Beispiel war das Rad aus Kapitel 12. Nun wollen wir eine ganz
allgemeine Anordnung von Punktteilchen betrachten.
Aufgabe 17.2 Man stelle sich den Körper aus N Teilchen aufgebaut vor, die durch virtuelle Stangen
miteinander verbunden sind. Wieviele solcher Stangen sind mindestens erforderlich, um den K örper
vollständig starr zu machen?
Wie üblich nummerieren wir die Teilchen mit einem Index α durch, und bezeichnen den Ort des Teilchens
α zur Zeit t mit rα (t). Jedes Teilchen nimmt dann einen festen Ort innerhalb des Körpers ein. Wenn wir
den Abstandsvektor uα = rα − r des Teilchens vom Bezugspunkt bezüglich der körperfesten Basis n a in
seine Komponenten zerlegen, so sind diese Komponenten zeitlich konstant. Es gilt also
rα (t) = r(t) + uα (t) = r(t) + uα,a na (t),
(17.9)
wobei die körperfesten Koordinaten uα,a des Teilchens nicht von der Zeit abhängen. Wir können dabei
den Bezugspunkt als Ursprung, und die Vektoren na als die Basis eines kartesischen Koordinatensystems
betrachten.
Durch den Bezugspunkt r und die Basis na wird ein körperfestes Koordinatensystem definiert, in dem die Position jedes Teilchen innerhalb des Körpers durch zeitunabh ängige Koordinaten festgelegt ist.
Dieser Sachverhalt ist in Abbildung 17.2(a) dargestellt. Das Teilchen befindet sich am Ort r α innerhalb
des Körpers. Der Vektor uα ist der Ortsvektor des Teilchens relativ zum Bezugspunkt r. Seine Komponenten uα,a bezüglich der Basis na ergeben sich als die Projektionen auf die mit {1, 2, 3} bezeichneten
187
(c)
(d)
pα
1
z
rα
y
3
uα × p α
1
rα
uα
uα
r
r
3
o
2
2
(a)
(b)
x
Abbildung 17.2: Die körperfesten und damit zeitunabhängigen Koordinaten u α,a des Teilchens α sind die
Komponenten des Abstandsvektors u = r α − r vom Bezugspunkt, dargestellt bezüglich der körperfesten
Basis na (a). Jedes Teilchen trägt mit seinem Impuls p α zu Gesamtimpuls bei und mit dem Kreuzprodukt
uα × pα zum inneren Drehimpuls (b).
Koordinatenachsen. Da sich sowohl der Bezugspunkt als auch diese Koordinatenachsen mit dem Körper
mitbewegen, sind die Koordinaten uα,a des Teilchens zeitlich unveränderlich.
Nun können wir leicht zeigen, dass wir den Bewegungszustand jedes einzelnen Teilchens aus den oben
definierten Bewegungsgrößen des starren Körpers bestimmen können. Der Ort ist durch (17.9) gegeben,
und die Geschwindigkeit des Teilchens ergibt sich zu
vα (t) = ṙα (t) = ṙ(t) + uα,a ṅa (t) = v(t) + uα,a ω(t) × na (t).
(17.10)
Die Geschwindigkeiten der einzelnen Teilchen lassen sich folglich durch die Geschwindigkeit v und die
Winkelgeschwindigkeit ω des Körpers ausdrücken, die im allgemeinen ebenfalls Funktionen der Zeit sind.
Die Kenntnis der Bewegungsgrößen r, na , v und ω reicht somit aus, um den Bewegungszustand jedes
Teilchens zu bestimmen, sobald wir die körperfesten Koordinaten u α,a des Teilchens kennen.
In diesem Sinne legen die Koordinaten uα,a der Teilchen den inneren Aufbau des Körpers fest, während
die Bewegungsgrößen seine Bewegung im Raum beschreiben. Wie wir gleich sehen werden, gehören zum
inneren Aufbau das Körpers noch andere Daten, wie zum Beispiel die Massen m α der einzelnen Teilchen,
oder deren Ladungen qα , wenn es sich um einen geladen Körper handelt. Entscheidend ist, dass diese
Größen zeitlich unveränderlich sind.
Nur die Bewegungsgrößen hängen von der Zeit ab. Für sie müssen wir die Bewegungsgleichungen
aufstellen, wenn die die Bewegungen eines starren Körpers berechnen wollen. Bevor wir dies tun, wollen
wir uns noch kurz überlegen, wie wir eine solche Bewegung explizit, also letztlich numerisch beschreiben
können. Dazu müssen wir zusätzlich ein raumfestes Koordinatensystem einführen, auf welches wir die
Darstellung der Bahn beziehen.
Wie üblich bezeichnen wir den Ursprung dieses Koordinatensystems mit o, und die Basis mit e i , wobei
der Index i die Werte {x, y, z} annimmt. Ort und Geschwindigkeit des Bezugspunktes lassen sich dann
durch ihre Koordinaten bzw. Komponenten bezüglich dieses Koordinatensystems ausdrücken,
r(t) = o + ri (t) ei ,
v(t) = vi (t) ei ,
mit vi (t) = ṙi (t).
(17.11)
Dasselbe gilt für die Basisvektoren na . Sie lassen sich als Linearkombination der Basisvektoren ei schreiben, wobei die Koeffizienten zeitabhängig sind. Da es sich um zwei Orthonormalbasen handelt, bilden die
188
Koeffizienten zu jedem Zeitpunkt eine orthogonale Matrix. Es gilt also
na (t) = Λai (t) ei ,
mit Λai (t) Λbi (t) = δab .
(17.12)
Diese Beziehung lässt sich auch umgekehrt schreiben, indem man die raumfesten Basisvektoren als Linearkombination der körperfesten darstellt,
ei = Λai (t) na (t),
mit Λai (t) Λaj (t) = δij .
(17.13)
In einer expliziten Darstellung der Bewegung eines starren Körpers sind es also nicht drei Vektoren, die als
Variable auftreten, sondern genau genommen eine orthogonale Transformation, die die raumfeste Basis
ei auf die körperfeste Basis na abbildet und dadurch die Lage des Körpers festlegt. Wenn sich der Körper
dreht, hängt diese Transformation natürlich von der Zeit ab.
Schließlich können wir auch noch die Winkelgeschwindigkeit in ihre Komponenten zerlegen, und zwar
wahlweise bezüglich der raumfesten oder der körperfesten Basis,
ω(t) = ωi (t) ei = ωa (t) na (t).
(17.14)
Weiter oben hatten wir bereits die Komponenten ωa benutzt, um die Existenz einer Winkelgeschwindigkeit
zu beweisen. Welche der beiden Darstellungen nützlicher ist, die körperfeste oder die raumfeste, hängt oft
von dem jeweils gestellten Problem ab. Wir können sie jederzeit ineinander umrechnen, denn aus (17.12)
und (17.13) folgt die entsprechende Umrechnungsformel für die Komponenten,
ωa (t) = Λai (t) ωi (t)
bzw. ωi (t) = Λai (t) ωa (t).
(17.15)
Aufgabe 17.3 Man zeige, dass sich die Zeitableitungen der Übergangsmatrizen wie folgt durch die Komponenten der Winkelgeschwindigkeit ausdrücken lassen,
Λ̇ai = εijk ωj Λak = εabc Λbi ωc ,
(17.16)
und dass sich daraus umgekehrt die folgenden Ausdrücke für die Komponenten der Winkelgeschwindigkeit
ergeben,
ωa =??εabc Λbi Λ̇ci ,
ωi =??εijk Λ̇aj Λak ,
(17.17)
Masse, Impuls und Kraft
Zur Herleitung der Bewegungsgleichungen für den starren Körper sind zwei Größen von zentraler Bedeutung, nämlich der Gesamtimpuls und der innere Drehimpuls des Körpers. Für ein System von einzelnen
Teilchen hatten diese Größen bereits in Kapitel 3 eingeführt, und wir hatten gezeigt, dass es sich dabei
unter gewissen Voraussetzungen um Erhaltungsgrößen handelt.
Berechnen wir zunächst den Gesamtimpuls des Körpers. Für jedes einzelne Teilchen können wir den
Impuls aus (17.10) berechnen. Wenn mα die Masse des Teilchen ist, dann gilt
pα (t) = mα vα (t) = mα v(t) + mα uα,a ω(t) × na (t).
(17.18)
Der Gesamtimpuls des Körpers ergibt sich durch Summation über alle Teilchen,
X
X
X
P (t) =
pα (t) =
mα v(t) +
mα uα,a ω(t) × na (t).
(17.19)
Der Ausdruck in der ersten Klammer ist offenbar die Gesamtmasse des Körpers,
X
M=
mα .
(17.20)
α
α
α
α
189
Der erste Beitrag zum Gesamtimpuls ist folglich von der Form “Masse man Geschwindigkeit”. Der zweite
Beitrag, der zur Winkelgeschwindigkeit proportional ist, lässt sich durch geschickte Wahl des Bezugspunktes eliminieren. Dazu berechnen wir den Schwerpunkt R des Körpers. Für ihn gilt
1 X
1 X
1 X
mα r α =
mα (r + uα,a na ) = r +
mα uα,a na .
(17.21)
R=
M α
M α
M
α
Offenbar verschwindet sie Summe in der Klammer genau dann, wenn wir als Bezugspunkt r den Schwerpunkt wählen, und genau in diesem Fall ist der Gesamtimpuls des Körpers durch den einfachen Ausdruck
P (t) = M v(t) = M ṙ(t)
(17.22)
gegeben. Da dies, wie schon eingangs erwähnt, die folgenden Rechnungen erheblich vereinfacht, wollen
wir von nun an diese spezielle Wahl treffen.
Aus der Definition des Impulses lässt sich nun leicht die erste Bewegungsgleichung ableiten. Auch
dazu betrachten wir zuerst wieder die einzelnen Teilchen. Auf jedes Teilchen wirkt eine äußere Kraft
Fα und eine Zwangskraft Zα , die dafür sorgt, dass die Abstände des Teilchens zu den anderen Teilchen
unverändert bleiben. Beide Kräfte hängen im allgemeinen von der Zeit ab. Somit gilt für jedes einzelne
Teilchen die Bewegungsgleichung
ṗα (t) = Fα (t) + Zα (t).
(17.23)
Die einzelnen Zwangskräfte kennen wir nicht, aber wir müssen sie auch nicht kennen, um die Bewegungsgleichung für den starren Körper als ganzes zu bestimmen. Wir summieren dazu einfach über alle Teilchen.
Das ergibt
X
Ṗ (t) = F (t) =
Fα (t),
(17.24)
α
denn für die Zwangskräfte Zα gilt das dritte Newtonsche Gesetz. Sie heben sich gegenseitig als Wechselwirkungskräfte auf, so dass die Summe über alle Teilchen verschwindet. Die zeitliche Änderung des
Gesamtimpulses P ist folglich durch die Gesamtkraft F gegeben, die sich wiederum als Summe aller auf
die einzelnen Teilchen wirkenden Kräfte ergibt.
Aus (17.22) und (17.24) ergibt sich somit das folgende System von Gleichung für die Bewegung des
Schwerpunktes des Körpers,
M ṙ(t) = P (t),
Ṗ (t) = F (t)
⇒
M r̈(t) = F (t).
(17.25)
Das sind formal die Bewegungsgleichung für ein punktförmiges Teilchen. Offenbar haben wir damit gezeigt, dass sich ein ausgedehnter Körper, wenn wir von seiner Rotationsbewegung absehen, tatsächlich
wie ein punktförmiges, in seinem Schwerpunkt befindliches Teilchen verhält. Die Bewegung des Bezugspunktes, also des Schwerpunktes, entkoppelt anscheinend von der Rotationsbewegung.
Das ist aber nicht ganz richtig. Es kommt nämlich entscheidend darauf an, wovon die Kraft F abhängt.
Da es sich um die Summe über alle auf die einzelnen Teilchen wirkenden Kräfte handelt, hängt diese
Kraft im allgemeinen auch von den Orten und Geschwindigkeiten aller dieser Teilchen ab, und somit auch
von der räumlichen Lage und der Winkelgeschwindigkeit des Körpers. Wir wollen uns das an ein paar
einfachen Beispielen klar machen.
Aufgabe 17.4 Zunächst befinde sich der Körper entweder in einem homogenen Gravitationsfeld g oder
einem homogenen elektrischen Feld E, wobei die Teilchen dann zus ätzlich noch Ladungen qα tragen sollen. Man zeige, dass in diesem Fall die Gesamtkraft durch
F =Mg
bzw. F = Q E
gegeben ist, wobei M die Gesamtmasse und Q die Gesamtladung des K örpers ist.
190
(17.26)
In einem homogenen elektrischen Feld bzw. einem homogenen Gravitationsfeld verhält sich ein ausgedehnter Körper also tatsächlich wie ein Punktteilchen. Das gilt in guter Näherung auch dann noch, wenn
das Feld zwar inhomogen ist, aber auf einer Skala, die sehr viel größer ist als die Ausdehnung des Körpers.
Als ein typisches Beispiel dafür hatten wir die Bewegung eines Planeten im Gravitationsfeld der Sonne
diskutiert. Innerhalb des Planeten kann das Gravitationsfeld der Sonne als homogen angenommen werden,
so dass die Gesamtkraft F tatsächlich nur vom Ort r des Schwerpunktes des Planeten abhängt. Wir können
nun sogar abschätzen, wie groß der Fehler ist, den wir dabei machen.
Aufgabe 17.5 Bewegt sich der Körper in einem inhomogenen Gravitationsfeld g, so wirkt auf ein Teilchen
am Ort rα die Kraft
Fα = mα g(rα ) = mα g(r + uα,a na ).
(17.27)
Man entwickle diesen Ausdruck bis zur zweiten Ordnung in den Koordinaten u α,a in eine Taylor-Reihe und
berechne daraus näherungsweise die Gesamtkraft. Man zeige, dass der Term erster Ordnung verschwindet.
Eine Abweichung von der Punkteilchen-Näherung, bei der man F = g(r) setzt, tritt also erst dann auf,
wenn die zweite Ableitung des Gravitationsfeldes von Null verschieden ist.
Aufgabe 17.6 Man zeige, dass der relative Fehler, den man bei der Berechnung der Kraft macht, wenn
man die Erde im Gravitationsfeld der Sonne als punktförmig betrachtet, von der Größenordnung Erdradius
geteilt durch Bahnradius hoch zwei ist, also etwa 10−9 .
Wie dieses Beispiel zeigt, gilt die Punktteilchen-Näherung nur dann, wenn der Körper so klein ist, dass
er die Inhomogenität eines Feldes nicht spürt. Geschwindigkeitsabhängige Kräfte führen ebenfalls dazu,
dass die Rotationsbewegung nicht mehr von der Schwerpunktbewegung entkoppelt, und somit der Körper
nicht mehr als Punktteilchen betrachtet werden kann.
Aufgabe 17.7 Der Körper bewege sich in einem homogenen Magnetfeld B. Man zeige, dass auf ihn die
Gesamtkraft
F = Q v × B + χa (ω × na ) × B
(17.28)
wirkt, wobei Q wieder die Gesamtladung und χa die körperfesten Komponenten des elektrischen Dipolvektors sind,
X
X
Q=
qα ,
χa =
qα uα,a .
(17.29)
α
α
Die Formel für die Lorentzkraft auf ein Punktteilchen, das sich im Schwerpunkt befindet, gilt also nur
dann, wenn der Dipolvektor des Körpers verschwindet. Das ist zum Beispiel dann der Fall, wenn die
Ladungsverteilung der Massenverteilung entspricht, also für alle Teilchen qα /mα = q/m gilt.
Trägheitstensor, Drehimpuls und Drehmoment
Nun wollen wir die Bewegungsgleichungen für die Rotationsbewegung aufstellen. Die entscheidende
Größe, die wir dazu benötigen, ist der innere Drehimpuls S. Wir erinnern uns, dass es für ein System
von Punktteilchen verschiedene Möglichkeiten gibt, einen Drehimpuls zu definieren. Der Drehimpuls eines einzelnen Teilchens bezüglich eines raumfesten Bezugspunktes o ist durch
lα = (rα − o) × pα
(17.30)
gegeben, also durch das Kreuzprodukt des Ortsvektors mit dem Impuls, wobei der Ortsvektor der Abstandsvektor zum Bezugspunkt o ist. Summieren wir über alle Teilchen, so ergibt sich der Gesamtdrehimpuls zu
X
X
L=
lα =
(rα − o) × pα .
(17.31)
α
α
191
Den Schwerpunktdrehimpuls hatten wir als den Drehimpuls eines fiktiven, im Schwerpunkt des Systems
lokalisierten Teilchens definiert, dessen Impuls der Gesamtimpuls des Systems ist. Für den starren Körper
lässt sich dieser unmittelbar aus den bereits eingeführten Bewegungsgrößen berechnen,
X
J = (r − o) × P =
(r − o) × pα .
(17.32)
α
Für einen starren Körper bezeichnet man dieser Größe auch als Bahndrehimpuls. Sowohl der Gesamtdrehimpuls als auch der Bahndrehimpuls hängen von der Wahl des Bezugspunktes o ab. Ersetzen wir ihn
durch einen anderen Bezugspunkt o0 , so hatten wir in Kapitel 3 gezeigt, dass dann
L0 = J − (o0 − o) × P
und J 0 = J − (o0 − o) × P
(17.33)
gilt. Beide Größen transformieren in der gleichen Art und Weise unter einer Verschiebung des Bezugspunktes. Der innere Drehimpuls ist die Differenz S = L − J . Er ist folglich unabhängig vom Bezugspunkt und eignet sich zur Beschreibung der Rotationsbewegung eines starren Körpers daher besser als der
Gesamtdrehimpuls.
Für einen starren Körper lässt sich der innere Drehimpuls leicht berechnen. Wir bilden einfach die
Differenz der Gleichungen (17.31) und (17.32),
X
X
S =L−J =
(rα − r) × pα =
uα × p α
(17.34)
α
α
Wie in Abbildung 17.2(b) gezeigt, trägt jedes Teilchen mit einem Beitrag zum inneren Drehimpuls bei,
der sich aus dem Kreuzprodukt des Abstandsvektors vom Schwerpunkt mit dem Impuls ergibt. In diesem Sinne ist der innere Drehimpuls, wie wir bereits in Abbildung 3 gesehen hatten, so etwas wie der
Gesamtdrehimpuls des System, wobei als Bezugspunkt aber nicht der Koordinatenursprung, sondern der
Schwerpunkt gewählt wird.
Wie der Impuls lässt sich auch der Drehimpuls durch die Bewegungsgrößen des starren Körpers ausdrücken. Wenn wir (17.18) in (17.34) einsetzen, ergibt sich
X
X
S=
uα × p α =
mα uα,a na × (v + uα,b ω × nb )
α
=
α
X
α
mα uα,a na × v +
X
α
mα uα,a uα,b na × (ω × nb ).
(17.35)
Der erste Term verschwindet, denn es handelt sich wieder um die Summe aus (17.21). Für das doppelte
Kreuzprodukt gilt
na × (ω × nb ) = (na · nb ) ω − (na · ω) nb = (δab ωc − δbc ωa ) nc .
(17.36)
Wenn wir nun noch ein paar Indizes umbenennen, lässt sich der innere Drehimpuls schließlich wie folgt
ausdrücken,
X
S=
mα (uα,c uα,c ωa − uα,a uα,b ωb ) na .
(17.37)
α
Noch einfacher wird dieser Ausdruck, wenn wir die Komponenten von S bezüglich der Basis n a angeben.
Dann ist
X
S = Sa na , mit Sa = Θab ωb , Θab =
mα (uα,c uα,c δab − uα,a uα,b ).
(17.38)
α
192
Die 3 × 3-Matrix Θab heißt Trägheitstensor. Es handelt sich offenbar um die zeitlich konstanten Komponenten eines symmetrischen Tensors Θ zweiter Stufe bezüglich des körperfesten Koordinatensystems.
Aufgefasst als lineare Abbildung bildet der Trägheitstensor die Winkelgeschwindigkeit auf den Drehimpuls ab. Mit der Notation aus (9) können wir dafür auch schreiben
S = Θ(ω),
mit Θ = Θab na ⊗ nb .
(17.39)
Diese Beziehung ist analog zur Beziehung P = M v zu verstehen, die eine lineare Beziehung zwischen
Impuls und Geschwindigkeit herstellt. Zu beachten ist allerdings, dass der Trägheitstensor Θ, im Gegensatz zur Masse M des Körpers, von seiner Lage im Raum abhängt. Diese geht also implizit in die lineare
Beziehung (17.39) ein. Wie wir gleich sehen werden, lässt sich aber auch diese Beziehung eindeutig umkehren, so dass aus dem Drehimpuls auf die Winkelgeschwindigkeit und damit die Rotationsbewegung
des Körpers geschlossen werden kann.
Zuvor wollen wir jedoch die eigentliche Bewegungsgleichung aufstellen. Dazu müssen wir die Zeitableitung des Drehimpulses berechnen. Wir gehen wieder von der Bewegungsgleichung (17.23) für das
Teilchen α aus. Für den Gesamtdrehimpuls folgt daraus
X
X
L̇ =
(rα − o) × ṗα =
(rα − o) × (Fα + Zα ).
(17.40)
α
α
Hier haben wir bereits verwendet, dass die Geschwindigkeit ṙα des Teilchens proportional zu pα ist, so
dass wir diesen Term nicht berücksichtigen müssen. In der Summe heben sich außerdem die Zwangskräfte
wieder gegenseitig auf. Wir schreiben sie dazu als Summe über Wechselwirkungskräfte zwischen je zwei
Teilchen, für die das dritte Newtonsche Gesetz gilt,
X
Zα =
Zα,β , mit Zα,β = −Zβ,α , Zα,α = 0.
(17.41)
β
Daraus folgt
X
α
(rα − o) × Zα =
X
α,β
(rα − o) × Zα,β = −
X
α,β
(rβ − o) × Zα,β .
(17.42)
Die letzte Gleichung ergibt sich, indem wie zuerst die Indizes α und β vertauschen, und anschließend
benutzen, dass Zα,β = −Zβ,α ist. Addieren wir die beiden letzten Ausdrücke, so ergibt sich
X
X
2
(rα − o) × Zα =
(rα − rβ ) × Zα,β = 0,
(17.43)
α
α
denn die Zwangskräfte, die dafür sorgen, dass die Abstände der Teilchen konstant bleiben, sind Zentralkräfte. Damit haben wir noch einmal gezeigt, dass Zentralkräfte den Gesamtdrehimpuls eines Systems
nicht verändern. Seine Zeitableitung hängt nur von den äußeren Kräften ab,
X
L̇ =
(rα − o) × Fα .
(17.44)
α
Für die Zeitableitung des Bahndrehimpulses ergibt sich aus (17.24)
X
J˙ = (r − o) × Ṗ = (r − o) × F =
(r − o) × Fα .
(17.45)
Bilden wir wieder die Differenz, so finden wir schließlich die Bewegungsgleichung für S,
X
X
Ṡ = M , mit M =
(rα − r) × Fα =
uα × F α .
(17.46)
α
α
α
193
Der Vektor M wird als Drehmoment bezeichnet. Es setzt sich wieder aus Beiträgen der einzelnen Teilchen zusammen, wobei jeweils das Kreuzprodukt des Abstandsvektors vom Bezugspunkt mit der Kraft zu
bilden ist. Das Bild ist das gleiche wie in Abbildung 17.2(b), wobei der Impuls p α durch die Kraft Fα zu
ersetzen ist.
Die Bewegungsgleichungen des starren Körpers lassen sich damit wie folgt kompakt zusammenfassen.
Sie bilden ein System von Differenzialgleichungen erster Ordnung. Impuls und Drehimpuls sind als lineare
Funktionen der Geschwindigkeit und Winkelgeschwindigkeit gegeben, die wiederum durch die zeitlichen
Ableitungen des Ortes und der Lage des Körpers gegeben sind,
P = M v,
S = Θ(ω),
mit v = ṙ,
ω=
1
εabc (ṅa · nb ) nc .
2
(17.47)
Die zeitlichen Änderungen von Impuls und Drehimpuls ergeben sich aus der Kraft und dem Drehmoment,
die sich wiederum aus den Kräfte auf die einzelnen Teilchen zusammensetzen,
X
X
Ṗ = F =
Fα ,
Ṡ = M =
uα × F α .
(17.48)
α
α
Insbesondere folgt aus den Bewegungsgleichungen, dass P und S Erhaltungsgrößen sind, wenn auf den
Körper keine äußeren Kräfte einwirken. Mit diesem Fall eines “freien” starren Körpers werden wir und
gleich ausführlich beschäftigen.
Aufgabe 17.8 Man zeige, dass auf einen starren Körper in einem homogenen Gravitationsfeld kein Drehmoment wirkt.
Aufgabe 17.9 Man berechne das Drehmoment auf einen geladenen K örper in einem homogenen elektrischen Feld und drücke das Ergebnis durch die Feldstärke E und den Dipolvektor χ = χa na aus
Aufgabe 17.7 aus.
Aufgabe 17.10 Man berechne die kinetische Energie eines starren K örpers und zeige, dass diese sich wie
folgt aus einer “Bewegungsenergie” und einer “Rotationsenergie” zusammensetzt,
T =
1
1
1
1
M v · v + Θ(ω, ω) = M vi vi + Θab ωa ωb .
2
2
2
2
(17.49)
Aufgabe 17.11 Man bestimme das Trägheitmoment der Hantel aus Abbildung 5.3(b). Wie groß sind laut
(17.49) Bewegungs- und Rotationsenergie, wenn die Hantel mit einer Winkelgeschwindigkeit ω um eine
zur Stange senkrechte Achse rotiert und sich mit der Geschwindigkeit v durch den Raum bewegt?
Kontinuierliche Körper
Die Vorstellung von einem aus einzelnen Teilchen aufgebauten Körper ist zwar sehr nützlich, um das Konzept eines starren Körpers auf der Basis der Mechanik von Punktteilchen zu verstehen. In der Praxis ist
dieses Konzept aber unbrauchbar, da es unmöglich ist, einen makroskopischen Körper durch die Gesamtheit seiner atomaren Teilchen zu beschreiben. Außerdem verhalten sich diese Teilchen ja in Wirklichkeit
nicht wie klassische Punkteilchen, sondern müssten genau genommen quantenmechanisch beschrieben
werden.
Wir wollen daher zeigen, dass wir über den genauen Aufbau eines starren Körpers eigentlich gar nicht
viel wissen müssen, um seine Bewegungsgleichungen aufzustellen. Es ist nicht nötig, die Koordinaten u α,a
aller Teilchen kennen, und wir müssen auch nicht alle Massen m α oder alle Ladungen qα der Teilchen
kennen. Es genügt, gewisse Verteilungsfunktionen dieser Größen zu kennen.
194
In die Beziehungen (17.47) zwischen Impuls und Geschwindigkeit bzw. Drehimpuls und Winkelgeschwindigkeit gehen zum Beispiel nur zwei solche Größen ein, nämlich die Gesamtmasse M und der
Trägheitstensor Θ. Welche Größen konkret in die Kraftgleichungen (17.48) eingehen, hängt zwar davon
ab, welche Art von Kräften auftreten. Aber auch hier ist es im allgemeinen so, dass wir nur ganz spezielle
Funktionen der Teilchenorte, Massen, Ladungen etc. kennen müssen, um die Kraft bzw. das Drehmoment
zu bestimmen.
Am Beispiel der Größen M und Θ wollen wir zeigen, wie sich diese Größen für einen aus kontinuierlicher Materie bestehenden Körper berechnen lassen. Alles, was wir dazu wissen müssen, ist, wie die
Masse innerhalb des Körpers verteilt ist. Dies wird durch eine Massendichte µ(r) beschrieben. In einem
Volumenelement dω(r) am Ort r befindet sich dann eine Masse dµ(r) = µ(r) dω(r).
Das Problem bei der Beschreibung eines sich bewegenden starren Körpers ist nun, dass diese Massendichte von der Zeit abhängt, und zwar in einer sehr speziellen Art und Weise. Die Zeitabhängigkeit der
Massendichte µ(r) kommt dadurch zustande, dass sich der Körper als ganzes zwar bewegt, nicht jedoch
durch eine Verformung des Körpers. Dieses Problem können wir dadurch lösen, dass wir zur Beschreibung
der Massendichte das körperfeste Koordinatensystem verwenden.
Wir betrachten die Massendichte daher nicht als Funktion des Ortes, sondern als Funktion µ(u) des in
Abbildung 17.2 definierten Vektors u, und stellen sie explizit als Funktion der körperfesten Koordinaten
dar, also letztlich als Funktion µ({ua }) von drei reellen Zahlen. Diese Funktion ist dann zeitlich konstant,
das heißt wir können mit ihnen rechnen wie mit einer zeitlich konstanten Massenverteilung.
So können wir zum Beispiel die Gesamtmasse des Körpers berechnen, indem wir die Massendichte
integrieren,
Z
Z
Z
M=
dµ(u) =
dω(u) µ(u) =
du1 du2 du3 µ(u).
(17.50)
Die Integration erfolgt formal immer über den ganzen Raum, wobei wir aber annehmen, dass der Körper
nur eine endliche Ausdehnung hat, so dass effektiv nur über einen endlichen Raumbereich zu integrieren ist. Da durch die körperfesten Koordinaten ua ein kartesisches Koordinatensystem definiert wird, ist
das Volumenelement einfach durch dω(u) = du1 du2 du3 gegeben, wobei alle Koordinaten über ganz R
laufen.
Die Massendichte µ(u) ist nicht ganz beliebig, denn auch für einen kontinuierlichen Körper gilt, dass
der Bezugspunkt mit dem Schwerpunkt übereinstimmen muss. Wie wir gesehen haben, ist dies für einen
aus Teilchen aufgebauten Körper genau dann der Fall, wenn die Summe in (17.21) verschwindet, also
X
mα uα,a = 0.
(17.51)
α
Ersetzen wir hier die Summe durch ein Integral, und die Massen mα der Teilchen durch das Massenelement
dµ(u) am Ort u, so ergibt sich die entsprechende Bedingung für einen kontinuierlichen Körper zu
Z
Z
dµ(u) ua = dω(u) µ(u) ua = 0
(17.52)
Man beachte, dass dies eine Vektorgleichung ist, die sich aus drei Komponenten zusammensetzt. An einem
einfachen Beispiel lässt sich zeigen, dass dadurch die Lage des Bezugspunktes eindeutig festgelegt wird.
Aufgabe 17.12 Ein gleichmäßig mit Masse gefüllter Quader werde durch die folgende Massendichte beschrieben,
µ0
falls a1 < u1 < b1 , a2 < u2 < b2 , a3 < u3 < b3 ,
µ(u1 , u2 , u3 ) =
(17.53)
0
sonst.
Man bestimme die Gesamtmasse und zeige, dass die Schwerpunktbedingung (17.52) genau dann erf üllt
ist, wenn a1 + b1 = a2 + b2 = a3 + b3 = 0 ist. In diesem Fall befindet sich der Mittelpunkt des Quaders
genau am Ort mit den Koordinaten u1 = u2 = u3 = 0.
195
Aufgabe 17.13 Es sei eine Massedichte µ(u) vorgegeben, die die Bedingung (17.52) nicht erf üllt. Man
zeige, dass man dann zu einer verschobenen Massedichte µ̃(u) = µ(u − a) übergehen kann, wobei a
ein fester Vektor ist, so dass die neue Massendichte µ̃(u) die Bedingung erf üllt. Dies entspricht einer
Verschiebung des Bezugspunktes so, dass der neue Bezugspunkt mit dem Schwerpunkt übereinstimmt.
Nun können wir auch den Trägheitstensor eines kontinuierlichen Körpers berechnen. Wir gehen von der
Darstellung (17.38) für Punktteilchen aus,
X
Θab =
mα (uα,c uα,c δab − uα,a uα,b ),
(17.54)
α
und ersetzen die Summe wieder durch ein Integral. Das ergibt
Z
Θab = dω(u) µ(u) (uc uc δab − ua ub ).
(17.55)
Aufgabe 17.14 Man berechne dieses Integral für den Quader aus Aufgabe 17.12, wobei der Schwerpunkt
jetzt mit dem Bezugspunkt übereinstimmen soll. Es ist dann −a1 = b1 = `1 /2, −a2 = b2 = `2 /2, −a3 =
b3 = `3 /2, wobei `1 , `2 , `3 die Kantenlängen des Quaders sind. Man zeige, dass sich der Trägheitstensor
schließlich wie folgt als Matrix darstellen lässt,
2
`2 + ` 3 2
0
0
Θ11 Θ12 Θ13
M
.
0
`3 2 + `1 2
0
Θab = Θ21 Θ32 Θ23 =
(17.56)
12
2
2
0
0
` 1 + `2
Θ31 Θ32 Θ33
Für einen Würfel der Kantenlänge ` ergibt sich daraus Θab = M `2 δab /6, das heißt der Trägheitstensor
eines Würfels ist proportional zur Einheitsmatrix.
Symmetrien des Trägheitstensors
Um den Trägheitstensor eines gegebenen Körpers explizit zu berechnen, können wir auch andere als kartesische Koordinatensystem verwenden, wenn diese besser an die Geometrie des Körpers angepasst sind.
Oft helfen dabei auch Symmetrieüberlegungen. Hat der Körper bestimmte Symmetrien, so hat auch der
Trägheitstensor diese Symmetrien, und damit lässt sich seine Berechnung oft erheblich vereinfachen.
Was bedeutet in diesem Fall Symmetrie? Wir nennen einen Körper symmetrisch, wenn er unter einer
bestimmten Transformation in sich übergeht. Da eine solche Transformation stets den Schwerpunkt auf
sich selbst abbilden muss, kann es sich nur um eine Rotation oder eine Spiegelung handeln, also um eine
orthogonale Transformation. Eine solche Abbildung wird durch eine orthogonale Matrix dargestellt,
u 7→ ũ = D(u),
ua 7→ ũa = Dab ub ,
mit Dab Dac = δab .
(17.57)
Wir verwenden diese Abbildung zunächst dazu, im Integral (17.55) eine Substitution durchzuführen, indem wir die Integrationsvariable u durch ũ = D · u ersetzen. Zunächst zeigt man leicht, dass für den
Ausdruck in der Klammer
(ũe ũe δab − ũa ũb ) = Dac Dbd (ue ue δcd − uc ud )
(17.58)
gilt. Ferner ist unter einer orthogonalen Transformation das Volumenelement invariant,
dω(ũ) = dω(D(u)) = dω(u).
196
(17.59)
Eingesetzt in (17.55) ergibt sich somit
Z
Z
Θab = dω(ũ) µ(ũ) (ũe ũe δab − ũa ũb ) = Dac Dbd dω(u) µ(D(u)) (ue ue δab − ua ub )
(17.60)
Beides sind Eigenschaften von orthogonalen Transformationen, die wir in Kapitel 9 bewiesen haben.
Nun betrachten wir den speziellen Fall, dass es sich bei der Abbildung u 7→ D · u um eine Symmetrie
des Körper handelt. In diesem Fall ist
µ(D(u)) = µ(u),
(17.61)
denn die Massendichte ist vor und nach der Anwendung der Abbildung die gleiche. Offenbar ergibt sich
dann aus (17.60)
Θab = Dac Dbd Θcd .
(17.62)
Den Ausdruck auf der rechten Seite kennen bereits als das Verhalten eines Tensors zweiter Stufe unter einer
linearen Abbildung. Die Aussage ist also, dass der Trägheitstensor unter jeder orthogonalen Abbildung
invariant ist, die den Körper in sich überführt.
Der Trägheitstensor ist mindestens so symmetrisch wie der Körper, zu dem er gehört.
Als spezielles Beispiel hatten wir bereits den Trägheitstensor eines Quaders berechnet und gesehen, dass
es sich um eine Diagonalmatrix handelt, wenn wir die Koordinatenachsen in die Richtungen der Kanten
legen. Tatsächlich ist dies eine Konsequenz der Symmetrien. Der Quader ist symmetrisch bezüglich der
Spiegelungen an der Koordinatenebenen. So wird zum Beispiel die Spiegelung an der 1-2-Ebene durch
die Matrix
1 0
0
Dab = 0 1
0
(17.63)
0 0 −1
dargestellt. Wie man leicht sieht, ergibt sich aus (17.62) zum Beispiel
Θ23 = D2c D3d Θcd = −Θ23
⇒
Θ23 = 0.
(17.64)
Entsprechend lässt sich das Verschwinden von allen anderen nichtdiagonalen Einträge von Θ ab zeigen,
indem man jeweils eine der drei möglichen Spiegelungen auswählt und die Gleichung (17.62) für die
entsprechende Komponente aufschreibt.
Wir haben also gezeigt, dass der Trägheitstensor diagonal ist, wenn der Körper symmetrisch unter Spiegelungen an den Koordinatenachsen ist. Oft ist der Trägheitstensor sogar noch symmetrischer als der
Körper selbst. Ein Beispiel dafür ist der Würfel. In diesem Fall ist, wie wir in Aufgabe 17.14 gesehen
haben, Θab = M `2 δab /6. Dieser Tensor ist unter allen orthogonalen Transformationen invariant, denn
er ist proportional zum Einheitstensor, und somit ist (17.62) für alle orthogonalen Matrizen erfüllt. Aber
natürlich geht der Würfel nicht unter allen orthogonalen Abbildung in sich über.
Umgekehrt können wir die Symmetrien eines Körpers nun auch benutzen, um den Trägheitstensor zu
berechnen. Der symmetrischste denkbare Körper ist eine Kugel. Wir wollen also den Trägheitstensor einer Kugel mit Radius R, Massendichte µ0 , und folglich der Masse M = 4π µ0 R3 /3 berechnen. Da der
Einheitstensor δab der einzige Tensor zweiter Stufe ist, der unter allen orthogonalen Abbildungen invariant
ist, muss der Trägheitstensor der Kugel proportional dazu sein. Wir machen also den Ansatz
Θab = θ δab
(17.65)
Um die skalare Größe θ zu berechnen, bilden wir die Spur dieses Tensors. Es ist Θ aa = 3 θ und folglich
Z
Z
1
1
2
θ = Θaa =
dω(u) µ(u) (uc uc δaa − ua ua ) =
dω(u) µ(u) ua ua .
(17.66)
3
3
3
197
Das Integral lässt sich nun am leichtesten in Kugelkoordinaten auswerten. Wir ersetzen die kartesischen
Koordinaten (u1 , u2 , u3 ) durch (r, ϑ, ϕ), wobei r 2 = ua ua ist, und die Massendichte nur von r abhängt.
Mit dem bekannten Volumenelement in Kugelkoordinaten finden wir
2
θ=
3
Z
8π
µ0
µ(r) r 4 sin ϑ dr dϑ dϕ =
3
Z
R
r 4 dr =
8π
2
µ0 R 5 = M R 2 .
15
5
(17.67)
0
Damit finden wir für den Trägheitstensor einer Kugel
Θab =
2
M R2 δab .
5
(17.68)
Aufgabe 17.15 Wie bewegt sich eine Kugel, wenn auf sie keine äußeren Kräfte wirken? Wie bewegt sich
ein Würfel ohne äußeren Kräfte?
Aufgabe 17.16 Eine Kugel und ein Würfel rotieren mit der gleichen Winkelgeschwindigkeit. Beide haben
dieselbe Masse und bestehen aus dem gleichen Stoff. Welcher der K örper besitzt eine größere Rotationsenergie?
Um ein nicht ganz so einfaches Beispiel vorzuführen, berechnen wir noch den Trägheitstensor eines Zylinders. Er soll den Radius R, die Länge `, und die Massendichte µ 0 haben. Für die Masse ergibt sich daraus
M = π µ0 ` R2 . Die Koordinatenachsen legen wir so, dass die Rotationsachse des Zylinders die 3-Achse
ist, und der Querschnitt eine Kreisscheibe in der 1-2-Ebene liegt.
Der Trägheitstensor ist dann wieder diagonal, denn der Zylinder ist symmetrisch unter Spiegelungen an
allen drei Koordinatenebenen. Es gilt also
Θ11 0
0
Θab = 0 Θ22 0 .
(17.69)
0
0 Θ33
Darüber hinaus gilt sogar Θ11 = Θ22 , aufgrund der Rotationssymmetrie um die 3-Achse. Das ist anschaulich mehr oder weniger offensichtlich, denn wir können die Richtungen den 1- und 2-Achse beliebig
wählen und somit die beiden Achsen auch vertauschen. Formal können wir den Beweis wie folgt führen.
Der Zylinder ist symmetrisch unter einer Spiegelung an der Winkelhalbierenden in der 1-2-Ebene. Diese
wird durch die Matrix
0 1 0
Dab = 1 0 0
(17.70)
0 0 1
dargestellt. Aus der Symmetrieforderung (17.62) an den Trägheitstensor ergibt sich daraus
Θ11 = D1c D1d Θcd = D12 D12 Θ22 = Θ22 .
Wir müssen also nur zwei Größen berechnen, nämlich Θ11 = Θ22 und Θ33 . Beginnen wir mit
Z
Θ33 = dω(u) µ(u) (u12 + u2 2 ).
(17.71)
(17.72)
Um dieses Integral auszuwerten, verwenden wir Zylinderkoordinaten, das heißt wir setzen
u1 = r cos ϕ,
u2 = r sin ϕ,
u3 = z
198
⇒
dω(u) = r dr dϕ dz.
(17.73)
Für die Massendichte gilt
µ(r, z) =
µ0
0
falls r < R,
sonst.
−`/2 < z < `/2,
(17.74)
Mit den entsprechenden Integrationsgrenzen und nach Ausführung der ϕ-Integration ergibt sich daraus
Θ33 = 2π µ0
Z
0
Z `/2
π
1
dr dz r 3 = µ0 ` R4 = M R2 .
2
2
R
(17.75)
−`/2
Für die Komponenten Θ11 und Θ22 gilt
Z
Θ11 = dω(u) µ(u) (u22 + u3 2 ),
Θ22 =
Z
dω(u) µ(u) (u12 + u3 2 ).
(17.76)
Da wir bereits wissen, dass sie gleich sind, berechnen wir die Summe und drücken das Integral wieder in
Zylinderkoordinaten aus,
Θ11 + Θ22 =
Z
dω(u) µ(u) (u12 + u2 2 + 2 u3 2 ) = 2π µ0
Z
0
Z `/2
dr dz r (r 2 + 2 z 2 ).
R
(17.77)
−`/2
Auch dieses Integral kann leicht ausgewertet werden. Man findet schließlich
Θ11 = Θ22 =
π µ0 ` R 4 π µ0 ` 3 R 2
M
+
=
(3 R2 + `2 ).
4
12
12
(17.78)
Für einen zylindrischen Körper sind also stets zwei diagonale Komponenten des Trägheitstensors gleich,
nämlich die in der Rotationsebene des Zylinders, während die dritte Komponente größer oder kleiner sein
kann, je nachdem, ob der Zylinder eher flach oder lang ist.
Wenn zwischen Radius und Länge die Beziehung `2 = 3 R2 gilt, so sind alle Komponenten gleich. In
diesem Fall ist der Trägheitstensor proportional zur Einheitsmatrix, hat also die gleichen Symmetrien wir
der eines Würfels oder einer Kugel. Gilt dagegen `2 > 3 R2 , zum Beispiel im Fall einer langen Stange,
so ist die Komponenten des Trägheitstensors entlang der Drehachse des Zylinders kleiner als die anderen.
Ein Drehung um diese Symmetrieachse hat eine kleinere Rotationsenergie als eine Drehung um eine dazu
senkrechte Achse. Ist der Zylinder dagegen flach wie ein Münze, so ist ` 2 < 3 R3 . In diesem Fall hat eine
Rotation um die Symmetrieachse ein höhere Energie als eine Rotation um eine dazu senkrechte Achse.
Aufgabe 17.17 Wie sieht der Trägheitstensor für das Rad aus Abbildung 12.3 aus?
199
18 Der Kreisel
Nachdem wir im letzten Kapitel die wesentlichen physikalischen Eigenschaften des starren Körpers beschrieben haben, wollen wir nun seine Bewegungen studieren. Schon für einen freien Kreisel, also für
einen starren Körper, der keinen äußeren Kräften ausgesetzt ist, sind diese Gleichungen nicht ganz einfach. Sie lassen sich zwar durch eine geschickte Wahl des körperfesten Koordinatensystems auf eine relativ
einfache Form bringen. Jedoch können nur für sehr spezielle Ausnahmefälle exakte Lösungen angegebene
werden.
Eigenwerte und Eigenvektoren
Bevor wir versuchen, die Bewegungsgleichungen zu lösen, werden wir sie auf eine möglichst einfache
Form bringen. Dazu müssen wir das körperfeste Koordinatensystem in einer speziellen Art und Weise
wählen. Wie wir bereits im letzten Kapitel gesehen haben, wird der Trägheitstensor durch eine Diagonalmatrix dargestellt, wenn der Körper besonders symmetrisch ist und das körperfeste Koordinatensystem an
diese Symmetrie angepasst wird.
Wir werden nun zeigen, dass es unabhängig von der Symmetrie des Körpers immer möglich ist, das
körperfeste Koordinatensystem so zu wählen, dass der Trägheitstensor durch eine Diagonalmatrix dargestellt wird. Wir benötigen dafür einen Satz aus der linearen Algebra, den wir kurz beweisen werden, weil
der Beweis auf einer sehr schönen Anwendung des Variationsprinzips mit Nebenbedingungen beruht.
Es sei ein N -dimensionaler, metrischer Vektorraum V gegeben, sowie ein symmetrischer Tensor zweiter
Stufe Θ. Durch einen solchen Tensor wird eine bilineare Abbildung definiert,
V ×V →R:
(x, y) 7→ Θ(x, y),
(18.1)
die ebenfalls symmetrisch ist,
Θ(x, y) = Θ(y, x).
(18.2)
Es sei nun ei eine Orthonormalbasis, x = xi ei und y = yi ei . Dann ist
Θ(x, y) = Θij xi yj ,
Θij = Θji .
(18.3)
Alternativ können wir den Tensor Θ auch als eine lineare Abbildung
V→V:
x 7→ Θ(x),
(18.4)
auffassen. In Komponenten ausgedrückt schreibt sich diese Abbildung als
x = x i ei
7→
y = y i ei ,
mit yi = Θij xj .
(18.5)
Wir können Θ also Wahlweise als Funktion mit einem Argument auffassen, wobei Θ(x) dann wieder ein
Vektor ist, oder als Funktion mit zwei Argumenten, wobei Θ(x, y) eine reelle Zahl ist. Wie man leicht
sieht, gilt
Θ(x, y) = x · Θ(y) = y · Θ(x) = Θ(y, x).
(18.6)
Einen nicht verschwinden Vektor n = ni ei nennen wir Eigenvektor von Θ, wenn er auf ein Vielfaches
von sich selbst abgebildet wird, wenn also gilt
EigenwertGleichung
Θ(n) = λ n,
bzw.
Θij nj = λ ni .
(18.7)
Die Zahl λ ∈ R ist der zugehörige Eigenwert. Über die Eigenwerte und Eigenvektoren lässt sich dann
folgender Satz beweisen.
200
Auf einem N -dimensionalen metrischen Vektorraum existieren zu jedem symmetrischen
Tensor zweiter Stufe insgesamt N zueinander senkrechte, normierte Eigenvektoren.
Es gibt also Einheitsvektoren na , mit a ∈ {1, . . . , N }, mit der Eigenschaft
Θ(na ) = λa na ,
na · nb = δab .
(18.8)
Man beachte, dass auf der rechten Seite der ersten Gleichung über den Index a nicht zu summieren ist.
Die Gleichung würde dann auch gar keinen Sinn ergeben. Es handelt sich an dieser Stelle also nicht
um einen Vektorindex im üblichen Sinne. Es ist einfach nur ein laufender Index, der die Eigenvektoren
durchnummeriert. Für die im folgenden auftretenden Indizes a, b, . . . gilt daher bis auf weiteres keine
Summenkonvention.
Der Beweis des Satzes erfolgt durch vollständige Induktion über die Dimension N des Vektorraums.
Für N = 1 ist der Satz trivial. In einem eindimensionalen Vektorraum ist jeder Vektor Eigenvektor einer
linearen Abbildung, also auch jeder Einheitsvektoren, von denen es in diesem Fall genau zwei gibt.
Es sei also N > 1, und wir nehmen an, dass der Satz für jeden Vektorraum kleinerer Dimension bereits
bewiesen ist. Als erstes zeigen wir, dass es in V immer mindestens einen Eigenvektor von Θ gibt. Dazu
betrachten wir die quadratische Funktion
L(n) =
1
Θ(n, n)
2
(18.9)
als Funktion auf der Einheitskugel, also der Menge aller Einheitsvektoren n in V. Das ist eine kompakte
Menge, und die Funktion L ist stetig und differenzierbar, also nimmt die Funktion irgendwo ihr Maximum
an. Wir werden zeigen, dass der Vektor n0 , an dem das Maximum angenommen wird, ein Eigenvektor von
Θ ist. Den zugehörigen Eigenwert nennen wir λ0 .
Wenn die Funktion L(n) an der Stelle n0 maximal ist, dann ist sie dort natürlich auch stationär. Wir
betrachten daher das folgende Variationsproblem mit Nebenbedingung. Gesucht sind diejenigen Vektoren
n ∈ V und Zahlen λ ∈ R, für die die Funktion
L(n, λ) =
1
1
Θ(n, n) − λ (n · n − 1)
2
2
(18.10)
stationär ist. Wie wir in Kapitel 14 gezeigt haben, ist diese Funktion genau an den Stellen stationär, die als
Kandidaten für die Extrema der Funktion (18.9) in Frage kommen. Tatsächlich liefert die Variation
δL(n, λ) = δn · (Θ(n) − λ n) −
1
δλ (n · n − 1).
2
(18.11)
Damit dieser Ausdruck für alle δλ und alle δn verschwindet, müssen die Gleichungen
n · n = 1 und
Θ(n) = λ n
(18.12)
erfüllt sein. Mit anderen Worten, n muss ein Einheitsvektor sein, der gleichzeitig ein Eigenvektor von Θ
zum Eigenwert λ ist. Wir haben gezeigt damit, dass der Vektor n0 , an dem die Funktion L(n) auf der
Einheitskugel ihr Maximum annimmt, ein Eigenvektor von Θ ist.
Tatsächlich können wir auf diese Weise alle Eigenvektoren von Θ finden, denn offenbar sind die Eigenvektoren n und die zugehörigen Eigenwerte λ genau diejenigen Vektoren, für die Funktion (18.10)
stationär ist. Es geht aber hier zunächst nur darum, zu beweisen, dass es stets N zueinander senkrechte
solche Vektoren gibt.
Wir zeigen nun, dass ein Vektor x, der zu n0 senkrecht steht, durch Θ auf einen Vektor y = Θ(x)
abgebildet wird, der ebenfalls zu n0 senkrecht steht. Das folgt aus der Symmetrie des Tensors Θ. Es ist
nämlich
n0 · y = n0 · Θ(x) = Θ(n0 , x) = Θ(n0 ) · x = λ0 n0 · x.
(18.13)
201
Aus x · n0 = 0 folgt also y · n0 = 0. Wir können das auch wie folgt formulieren. Der Orthogonalraum
V⊥ = {
x ∈ V,
x · n0 = 0
}
(18.14)
wird von der Abbildung Θ auf sich abgebildet. Es existiert also eine lineare Abbildung
V⊥ → V ⊥ :
x 7→ Θ(x),
(18.15)
die die gleichen Eigenschaften hat wie die Abbildung (18.4) auf V. Sie wird durch einen Tensor zweiter
Stufe auf V⊥ dargestellt, der ebenfalls symmetrisch ist, denn die Gleichung (18.2) gilt natürlich auch
für alle Vektoren aus V⊥ . Ferner ist V⊥ natürlich auch ein metrischer Vektorraum. Allerdings mit einer
kleineren Dimension, das heißt wir können annehmen, dass der Satz dort bereits gilt.
Es gibt also einen Satz von Einheitsvektoren na aus V⊥ , mit a ∈ {1, . . . , N − 1}, und mit den Eigenschaften (18.8). Setzen wir nun nN = n0 , so sehen wir leicht, dass diese Eigenschaften auch für alle N
Vektoren gelten, denn nN ist ein Eigenvektor von Θ, ein Einheitsvektor, und er steht senkrecht zu allen
anderen Vektoren. Damit ist der Satz bewiesen.
Aufgabe 18.1 An welchen beiden Stellen geht in den Beweis ein, dass der Tensor Θ symmetrisch ist, und
warum ist das wesentlich?
Hauptachsen
Was bedeutet das nun für das physikalische Problem der Beschreibung eines rotierenden Körpers? Ein
Satz von N zueinander senkrechten Einheitsvektoren in einem N -dimensionalen Vektorraum ist natürlich
eine Orthonormalbasis. Es existiert also eine Orthonormalbasis, die aus Eigenvektoren besteht.
Wir haben damit gezeigt, dass wir das körperfeste Koordinatensystem eines starren Körpers stets so
wählen können, dass die Basisvektoren (n1 , n2 , n3 ) Eigenvektoren des Trägheitstensors sind. Die Koordinatenachsen, die dadurch definiert werden, heißen Haupttr ägheitsachsen des Körpers, oder kurz Hauptachsen. Die zugehörigen Eigenwerte sind die Trägheitsmomente des Körpers. Wir bezeichnen sie im folgenden mit (θ1 , θ2 , θ3 ). Es gilt also
Hauptachsen
Θ(n1 ) = θ1 n1 ,
Θ(n2 ) = θ2 n2 ,
Θ(n3 ) = θ3 n3 .
(18.16)
Wenn wir das Koordinatensystem auf diese Weise festlegen, dann ist die Darstellung des Trägheitstensors
in dieser Basis, also die Matrix Θab , eine Diagonalmatrix ist. Sei nämlich ω irgendein Vektor, typischerweise eine Winkelgeschwindigkeit, und S = Θ(ω) der zugehörige Drehimpuls, dann gilt
ω = ω 1 n1 + ω 2 n2 + ω 3 n3
⇒
S = Θ(ω) = θ1 ω1 n1 + θ2 ω2 n2 + θ3 ω3 n3
(18.17)
Anderseits gilt natürlich in jedem körperfesten Koordinatensystem, jetzt wieder mit der Summenkonvention,
Sa = Θab ωb ⇒ S = Θab ωb na .
(18.18)
Durch Koeffizientenvergleich stellen wir fest, dass die Matrix Θab diagonal ist,
θ1 0 0
Θab = 0 θ2 0
0 0 θ3
(18.19)
Die Aussage des Satzes von oben, angewandt auf die spezielle physikalisch Situation, lautet somit wie
folgt:
202
Jeder starre Körper besitzt ein System von drei Hauptachsen. Wählt man diese als Achsen des
körperfesten Koordinatensystems, so ist der Trägheitstensor eine Diagonalmatrix.
Die Hauptachsen sind nicht immer eindeutig bestimmt. Sind nämlich zwei der drei Eigenwerte, oder sogar
alle drei gleich, so können wir zu beliebigen Linearkombinationen der entsprechenden Eigenvektoren
übergehen und bekommen wieder Eigenvektoren zu den gleichen Eigenwerten.
Dieser Fall liegt vor, wenn der Körper rotationssymmetrisch um eine Achse ist, wie etwa der Zylinder,
dessen Trägheitstensor wir im letzten Kapitel berechnet hatten. In diesem Fall gibt es keine bevorzugte
Wahl der beiden zur Zylinderachse senkrecht stehenden Hauptachsen. Und bei einer Kugel gibt es natürlich
gar keine bevorzugte Wahl der Hauptachsen, denn jeder Vektor ist eine Eigenvektor des Trägheitstensors,
der in diesem Fall proportional zum Einheitstensor ist.
Aber auch, wenn der Körper selbst nicht symmetrisch ist, können gleiche Eigenwerte auftreten. Ein Beispiel hierfür ist ein Quader mit quadratischer Grundfläche. Dann sind zwei der drei Eigenwerte in (17.56)
gleich. Durch den Trägheitstensor wird dann nur eine der Hauptachsen festgelegt, nämlich diejenige, die
zur quadratischen Grundfläche senkrecht steht. Die anderen beiden Achsen können beliebig gewählt werde. Und schließlich hat ein Würfel, was den Trägheitstensor betrifft, die gleichen Symmetrien wie eine
Kugel, also gar keine ausgezeichneten Hauptachsen.
Wie wir später sehen werden, entsprechen die drei verschiedenen Möglichkeiten, nämlich paarweise
verschiedene, zwei gleiche, oder drei gleiche Eigenwerte, drei verschiedenen Schwierigkeitsgraden bei
der Lösung der Bewegungsgleichungen. Je symmetrischer der Körper, umso leichter lassen sich die Bewegungsgleichungen lösen. Bei drei gleichen Eigenwerten ist die Lösung trivial. Bei zwei gleichen Eigenwerten lässt sie sich relativ leicht angeben. Bei drei verschiedenen Eigenwerten ist sie nicht mehr
elementar darstellbar.
In den folgenden Aufgaben werden noch ein paar nützliche Eigenschaften der Eigenwerte des Trägheitstensors zusammenstellen, die wir bei der Lösung der Bewegungsgleichungen benötigen werden.
Aufgabe 18.2 Bis auf einen sehr speziellen Fall sind die Trägheitsmomente immer positiv,
θ1 , θ2 , θ3 > 0.
(18.20)
Daraus folgt unter anderem, dass die Matrix Θab invertierbar ist, so dass die Winkelgeschwindigkeit eine
eindeutige Funktion des Drehimpulses ist. Man beweise das und zeige, dass der spezielle Fall genau dann
vorliegt, wenn der Körper zu einer unendlich dünnen Stange entartet ist. Dann ist eines der Trägheitsmomente Null, und die anderen beiden sind gleich. Warum ist in diesem Fall die Beziehung zwischen
Winkelgeschwindigkeit und Drehimpuls nicht umkehrbar?
Aufgabe 18.3 Man zeige, dass für die Eigenwerte des Trägheitstensors die Dreiecksungleichungen
θ1 + θ 2 ≥ θ 3 ,
θ2 + θ 3 ≥ θ 1 ,
θ3 + θ 1 ≥ θ 2
(18.21)
gelten. Diese Ungleichungen gelten sogar ganz allgemein f ür die Diagonalelemente Θ11 , Θ22 und Θ33
bezüglich jeder Basis. Bei welcher Geometrie des Körpers gilt in einer der drei Ungleichungen das Gleichheitszeichen?
Der freie Kreisel
Nach diesen Vorbereitungen können wir jetzt die Bewegungsgleichungen für den freien starren Körper
aufstellen. Frei bedeutet wie üblich, dass auf den Körper keine äußeren Kräfte einwirken sollen.
Ausgangspunkt sind die allgemeinen Bewegungsgleichungen (17.47) und (17.48), wobei wir dort alle
Kräfte gleich Null setzen und somit die Erhaltungssätze für den Impuls und den Drehimpuls folgen,
Ṗ (t) = 0,
Ṡ(t) = 0.
203
(18.22)
Aus der ersten Gleichung ergibt sich unmittelbar, dass die Geschwindigkeit des Körpers konstant ist, der
Schwerpunkt des Körpers also eine geradlinig gleichförmig Bewegung ausführt. Diese ist völlig uninteressant, so dass wir im folgenden annehmen können, dass der Schwerpunkt ruht.
Aufgabe 18.4 Um die folgenden Aussagen experimentell zu überprüfen, ohne dafür große Geldsummen
auszugeben, wird man in der Regel so vorgehen, dass man einen K örper im Gravitationsfeld der Erde frei
fallen lässt. Genau genommen handelt es sich also nicht um einen kr äftefreien Körper. Warum entkoppelt
die Bewegung des Schwerpunktes trotzdem von der Rotationsbewegung?
Um die Rotationsbewegung zu beschreiben, müssen wir die Gleichung Ṡ = 0 näher untersuchen. Wir
schreiben zunächst den Drehimpuls in Komponenten bezüglich der körperfesten Basis auf, wobei wir
wieder genau beachten, welche Größen zeitabhängig sind und welche nicht. Es gilt
S(t) = Sa (t) na (t) = Θab ωb (t) na (t).
(18.23)
Wir verwenden an dieser Stelle noch nicht, dass der Trägheitstensor diagonal ist, das heißt noch gelten alle
Gleichungen in beliebigen körperfesten Koordinatensystemen. Wir berechnen die Ableitung des Drehimpulses und finden unter Verwendung von (17.4)
Ṡ(t) = Θab ω̇b (t) na (t) + Θab ωb (t) ṅa (t)
= Θab ω̇b (t) na (t) + Θab ωb (t) ω(t) × na (t)
= Θab ω̇b (t) na (t) + Θab ωb (t) ωc (t) nc (t) × na (t)
= Θab ω̇b (t) na (t) + Θab ωb (t) ωc (t) εcad nd (t)
= Θdb ω̇b (t) + Θab ωb (t) ωc (t) εcad nd (t)
(18.24)
Θab ω̇b (t) = εabc Θbd ωc (t) ωd (t).
(18.25)
Überraschenderweise ist die Gleichung Ṡ = 0 nicht in der Winkelgeschwindigkeit linear, sondern quadratisch. Das liegt daran, dass die Beziehung zwischen ω und S zu jedem Zeitpunkt zwar linear ist, diese
lineare Abbildung aber von der Zeit abhängt und ihre Zeitableitung wiederum von der Winkelgeschwindigkeit abhängt.
Da es sich bei (18.24) um eine Vektorgleichung handelt, spielt es keine Rolle, in welcher Basis wir sie
darstellen, und ob diese Basis zeitabhängig ist oder nicht. Zu jedem Zeitpunkt müssen alle Komponenten
des Vektors verschwinden. Also ergibt sich ein Satz von Bewegungsgleichungen, in denen nur noch die
Komponenten ωa der Winkelgeschwindigkeit im körperfesten Koordinatensystem auftreten. Wenn wir
wieder ein paar Indizes umbenennen, lauten sie
Wir können zunächst unabhängig von der räumlichen Lage des Körpers diese Bewegungsgleichungen für
die Winkelgeschwindigkeit lösen. Dazu müssen wir Anfangswerte ω a (t0 ) vorgeben. Dann ist die Lösung
eindeutig bestimmt. Wie wir gerade gezeigt haben, ist die Matrix Θab nämlich invertierbar. Die Bewegungsgleichungen können also nach den Zeitableitungen ω̇ a (t) aufgelöst werden. Wir werden das gleich
explizit tun.
Um anschließend die tatsächliche Bewegung des Körpers zu bestimmen, müssen wir noch die Anfangsbedingungen für die Lage vorgeben, also die Vektoren n a (t0 ). Ihre Zeitableitungen sind dann durch die
Bewegungsgleichungen
ṅa (t) = ω(t) × na (t) = −εabc ωb (t) nc (t)
(18.26)
eindeutig bestimmt. Wir können daraus die Bewegung der körperfesten Basis n a (t) bestimmen, sobald
wir die Funktionen ωa (t) kennen. Wenn wir dazu noch die unabhängige Bewegung des Schwerpunktes
hinzunehmen, kennen wir die Bewegung des Körpers vollständig.
204
Wir schauen uns nun die gekoppelten Differenzialgleichungen (18.25) für die Winkelgeschwindigkeit
genauer an. Sie vereinfachen sich etwas, wenn wir das Koordinatensystem an die Hauptachsen des Körpers
anpassen. Wir führen dazu die Summen explizit aus, und benutzen die diagonale Darstellung (18.19) des
Trägheitstensors. Daraus ergeben sich die folgenden drei Gleichungen,
θ1 ω̇1 (t) = (θ2 − θ3 ) ω2 (t) ω3 (t),
θ2 ω̇2 (t) = (θ3 − θ1 ) ω3 (t) ω1 (t),
θ3 ω̇3 (t) = (θ1 − θ2 ) ω1 (t) ω2 (t).
(18.27)
Diese Gleichungen werden als freie Kreisgleichungen, manchmal auch als Eulersche Kreiselgleichungen
bezeichnet. Sie sind in den Indizes {1, 2, 3} zyklisch, jedoch handelt es sich immer noch um nichtlineare, gekoppelte Differenzialgleichungen, die sich nicht geschlossen lösen lassen. Wir werden deshalb im
folgenden versuchen, möglichst viele qualitative Aussagen über ihre Lösungen und damit die möglichen
Bewegungen eines starren Körpers zu machen.
Aufgabe 18.5 Für den speziellen Fall eines Kugelkreisels werden die Kreiselgleichungen trivial. Man gebe die allgemeine Lösung an, und löse anschließend auch die Bewegungsgleichungen für die körperfesten
Basisvektoren (18.26). Warum kann dabei ohne Beschränkung der Allgemeinheit angenommen werden,
dass nur eine der drei Komponenten ωa von Null verschieden ist?
Der unsymmetrische Kreisel
Wir betrachten zuerst den Fall, dass alle drei Trägheitsmomente verschieden sind, und natürlich nicht
verschwinden. Ein Körper mit dieser Eigenschaft heißt unsymmetrischer Kreisel. Wir nummerieren die
Eigenwerte des Trägheitstensors so, dass sie absteigende Werte haben, also
θ1 > θ2 > θ3 > 0.
(18.28)
Dann lassen sich die Gleichungen (18.27) nicht mehr weiter vereinfachen. Es gibt aber drei spezielle
Lösungen dieser Gleichungen, die wir unmittelbar ablesen können. Setzen wir nämlich zwei der drei
Funktionen ωa (t) gleich Null, so sind zwei der drei Gleichungen identisch erfüllt, und die dritte Gleichung verlangt, dass die dritte Funktion konstant ist. So ist zum Beispiel
ω1 (t) = ω0 ,
ω2 (t) = 0,
ω3 (t) = 0,
(18.29)
mit einer beliebigen Konstanten ω0 eine Lösung. Das gleiche gilt bei zyklisch vertauschten Indizes.
Wie sieht in diesem Fall die Bewegung des Körper aus? Im körperfesten System zeigt die Winkelgeschwindigkeit konstant in die Richtung einer der Hauptachsen, in diesem Fall in Richtung von n 1 . Die
Gleichungen (18.27) lassen sich dann ebenfalls leicht lösen. Man findet
ṅ1 (t) = 0,
ṅ2 (t) = n3 (t),
ṅ3 (t) = −n2 (t).
(18.30)
Als Anfangsbedingung geben wir der Einfachheit halber n1 (0) = ex , n2 (0) = ey und n3 (0) = ez vor.
Wir wählen einfach das raumfeste Bezugsystem so, dass es zum Zeitpunkt t = 0 mit dem körperfesten
Bezugsystem übereinstimmt. Dann lautet die eindeutige Lösung von (18.30)
n1 (t) = ex ,
n2 (t) =
cos(ω0 t) ey + sin(ω0 t) ez ,
n3 (t) = − sin(ω0 t) ey + cos(ω0 t) ez .
(18.31)
Der Körper rotiert gleichmäßig mit der Winkelgeschwindigkeit ω0 um die x-Achse, die mit der ersten
Hauptachse übereinstimmt. Die anderen drei Lösungen beschreiben entsprechend eine gleichmäßige Rotation um die anderen Hauptachsen.
205
replacements
(d)
(b)
(a)
(c)
Abbildung 18.1: Die Rotation eines unsymmetrischen Kreisels um die Hauptachse mit dem größten (a)
bzw. kleinsten (c) Trägheitsmoment ist stabil. Die Rotation um die Hauptachse mit dem mittleren (b)
Trägheitsmoment ist instabil.
Aufgabe 18.6 Es sei ω0 > 0. Man verifiziere mit der Rechten-Hand-Regel, dass die Rotation tats ächlich
rechtsherum erfolgt, also in die Richtungen der Finger in der rechten Faust, wenn der Daumen in Richtung
der Vektors ω zeigt.
Mit einem geeigneten Testkörper müsste sich die Existenz dieser Lösungen bestätigen lassen. Ein geeigneter Körper für solche Experimente ist ein Buch. Es ist starr genug, wenn man es so verpackt, dass es sich
nicht von selbst öffnen kann. Es kann leicht in Rotation versetzt werden, und es richtet keinen größeren
Schaden an, wenn die Schwerpunktbewegung einmal nicht so verläuft wie geplant. Außerdem sind seine
drei Trägheitsmomente paarweise verschieden, wenn das Papierformat nicht zufällig quadratisch ist.
Aufgabe 18.7 In welchem Verhältnis stehen die Trägheitsmomente zueinander, wenn sich die Kanten des
Buches wie 1 : 7 : 10 verhalten? Das entspricht einem typischen Buch im DIN-Format.
Um das Experiment durchzuführen, versetzt man das Buch so in Rotation, dass es sich um eine der Hauptachsen dreht. Die Rotationsachse verläuft also parallel zu den Kanten. Wirft man das Buch zusätzlich
nach oben, so fällt es für eine kurze Zeit frei im Gravitationsfeld der Erde. Wie wir bereits gezeigt haben,
entsteht dadurch kein Drehmoment, so dass der Fall auf die Drehbewegung keinen Einfluss hat.
Das Ergebnis dieses Experiments ist in Abbildung 18.1 dargestellt. Wählt man wie in (a) die Achse
n1 mit dem größten Trägheitsmoment θ1 , so rotiert der Körper sehr stabil um diese Achse. Ähnlich sieht
es aus, wenn man wie in (c) dargestellt die Achse n3 mit dem kleinsten Trägheitsmoment θ3 wählt. Der
Körper führt eine gleichmäßige Drehung um diese Achse aus.
Ganz anders sieht das Ergebnis in Abbildung 18.1 (b) aus. Hier dreht sich der Körper zunächst um die
Hauptachse n2 mit dem mittleren Trägheitmoment θ2 . Nach einer kurzen Flugstrecke beginnt der Körper
allerdings zu taumeln. Die Rotation ist alles andere als gleichmäßig. Eine konstante Rotationsachse ist
206
nicht mehr erkennbar. Es geschieht sogar noch etwas merkwürdiges. Hält man das Buch beim Werfen so,
dass zum Beispiel der Buchrücken in der rechten Hand liegt, so kann man mit etwas Übung das Buch so
wieder auffangen, dass der Rücken jetzt in der linken Hand liegt.
In der Abbildung 18.1(b) ist diese Umklappbewegung an dem dunklen Band erkennbar, das sich beim
Abwurf rechts befand. Nach der taumelnden Bewegung im Zenit der Bahn befindet sich das Band aber
plötzlich auf der linken Seite. Das ist deswegen verblüffend, weil eine Rotation um die vorgegebene Achse,
die in diesem Fall senkrecht zum Buchrücken verläuft, einen solchen Seitenwechsel eigentlich gar nicht
verursachen sollte. Wie also kommt der Buchrücken von einer Seite auf die andere?
Aufgabe 18.8 Man führe die Experimente mit einem geeigneten Gegenstand durch und beobachte dabei
insbesondere den “Seitenwechsel” im Fall (b).
Stabile und instabile Achsen
Das beobachtete Phänomen beruht offenbar darauf, dass wir im Experiment die Anfangsbedingungen nicht
so vorgeben können, dass wir genau eine der drei bekannten, speziellen Lösungen der Kreiselgleichungen
treffen. Dass trotzdem eine stabile Drehung um die 1- bzw. 3-Achse möglich ist, liegt wohl daran, dass
es “in der Nähe” dieser speziellen Lösungen noch andere Lösungen gibt, die so ähnlich aussehen. Die
Drehachse ist also nicht wirklich konstant, aber zumindest näherungsweise.
Für den Fall einer Drehung um die 2-Achse scheint es solche “ähnlichen” Lösungen dagegen nicht zu
geben. Der Körper durchläuft eine völlig andere Bewegung, wenn wir diese Lösung nicht genau treffen.
Wir wollen versuchen, das anhand der Kreiselgleichungen qualitativ zu verstehen. Es zeigt sich, dass der
Schlüssel zum Verständnis dieses Verhaltens in den Erhaltungsgrößen liegt, die wir bereits kennen.
Es ist nützlich, die Kreiselgleichungen (18.27) als Bewegungsgleichungen für die Komponenten des
Drehimpulses im körperfesten System umzuschreiben. Im Hauptachsensystem besteht zwischen den Komponenten der Winkelgeschwindigkeit und denen des Drehimpulses der einfache Zusammenhang
S1 = θ 1 ω1 ,
S2 = θ 2 ω2 ,
S3 = θ 3 ω3 .
(18.32)
Da die Trägheitsmomente zeitlich konstant sind, ergeben sich aus (18.27) für die Komponenten des Drehimpulses die ähnlich aussehenden Differenzialgleichungen
Ṡ1 (t) =
θ2 − θ 3
S2 (t) S3 (t),
θ2 θ3
Ṡ2 (t) =
θ3 − θ 1
S3 (t) S1 (t),
θ3 θ1
Ṡ3 (t) =
θ1 − θ 2
S1 (t) S2 (t).
θ1 θ2
(18.33)
Auch diese können wir nicht explizit lösen. Aber wir können ein paar wichtige Aussagen über die Lösungen machen. Wir wissen nämlich, dass der Drehimpuls eine Erhaltungsgröße, also zeitlich konstant ist.
Dass die Drehimpulskomponenten Sa zeitabhängig sind, liegt also nur daran, dass die Basis na , bezüglich
der diese Komponenten definiert sind, zeitabhängig ist.
Was können wir daraus schließen? Wenn der Drehimpuls konstant ist, dann ist insbesondere sein Betrag
konstant. Den können wir aber auch im körperfesten Bezugsystem ausrechen. Es ist natürlich
|S|2 = S1 2 + S2 2 + S3 2 .
(18.34)
Wir wissen also, dass sich die Funktionen Sa (t) so verhalten, dass der Betrag dieses Vektors konstant
bliebt. Im körperfesten Bezugsystem bewegt sich der Drehimpulsvektor auf einer Kugel mit dem Radius
ρ0 = |S|.
207
3
3
2
2
replacements
1
(c)
(d)
(a)
1
(b)
Abbildung 18.2: Beim unsymmetrischen Kreisel (a) läuft der Drehimpulsvektor im körperfesten System
auf einer Schnittlinie von einer Kugel und einem Ellipsoid um. Aus der Geometrie dieser Schnittkurven
entnimmt man, dass eine Rotation um die 1- oder 3-Achse stabil ist, während eine Rotation um die 2Achse instabil ist. Beim symmetrischen Kreisel (b) sind alle Schnittkurven Kreise.
Aufgabe 18.9 Man zeige, dass aus den Bewegungsgleichungen (18.33) tats ächlich die Erhaltung der rechten Seite von (18.34) folgt.
Eine zweite Erhaltungsgröße, die wir bereits einmal berechnet haben, ist die Energie. Hier ist allein die
Rotationsenergie von Belang. Für sie hatten wir den Ausdruck
1
1
1
(18.35)
Θ(ω, ω) = Θab ωa ωb = (θ1 ω1 2 + θ2 ω2 2 + θ3 ω3 2 )
2
2
2
gefunden. Auch diese Erhaltungsgröße können wir durch die Komponenten des Drehimpulses ausdrücken.
Es ist
1 S1 2 S2 2 S3 2 Erot =
+
+
.
(18.36)
2 θ1
θ2
θ3
Aufgabe 18.10 Man bestätige auch diesen Erhaltungssatz durch explizites Einsetzen in die Bewegungsgleichungen (18.33).
Erot =
Durch die Energiegleichung (18.36) wird im körperfesten Koordinatensystem ein Ellipsoid definiert. Seine
Halbachsen entlang der Koordinatenachsen sind
p
p
p
ρ1 = 2 Erot θ1 ,
ρ2 = 2 Erot θ2 ,
ρ3 = 2 Erot θ3 .
(18.37)
Wir können daraus den Schluss ziehen, dass sich der Drehimpuls im körperfesten Koordinatensystem
auf einer Bahn bewegt, die sowohl auf einer Kugel mit Radius ρ0 , als auch auf einem Ellipsoid mit den
Halbachsen (ρ1 , ρ2 , ρ3 ) mit ρ1 > ρ2 > ρ3 liegt.
Die Schnittkurven dieser beiden geometrischen Objekte im dreidimensionalen Raum lassen sich bestimmen. Sie sind in Abbildung 18.2(a) dargestellt. Gezeigt ist ein Ellipsoid im körperfesten Koordinatensystem, das zu einer festen Energie gehört. Die Halbachse ρ1 in 1-Richtung ist die größte, die Halbachse
ρ3 in 3-Richtung die kleinste, und die Halbachse ρ2 in 2-Richtung hat eine mittlere Länge.
Die Linien darauf sind die Schnittkurven mit Kugeln verschiedener Radien ρ 0 . Offenbar muss ρ3 ≤
ρ0 ≤ ρ1 sein, damit es überhaupt eine Schnittmenge gibt. In physikalischen Größen ausgedrückt heißt das
θ3 ≤
|S|2
≤ θ1 .
2 Erot
208
(18.38)
An den Rändern dieses Intervalls besteht die Schnittmenge jeweils nur aus zwei Punkten. Dies entspricht
den bereits bekannten speziellen Lösungen der Kreiselgleichungen, nämlich den Rotationen um die Hauptachsen n1 und n3 , wobei die Rotation in positive oder negative Richtung erfolgen kann.
Die Schnittkurven in der Nähe dieser Punkte sehen wie kleine Kreise aus. Wenn wir einen Anfangszustand vorgeben, bei dem zum Beispiel ω ≈ ω1 n1 ist, dann ist S ≈ ω1 θ1 n1 . Der Drehimpuls im
körperfesten System ist dann zwar nicht konstant, sondern läuft auf einer bestimmten Schnittlinie von Ellipsoid und Kugel um. Aber auf dieser Linie kann er nicht “weit weg” laufen. Er bleibt in der Nähe des
Ausgangspunktes, so dass für alle Zeiten S ≈ ω1 θ1 n1 und somit auch ω ≈ ω1 n1 gilt.
Aufgabe 18.11 Das lässt sich auch quantitativ zeigen. Es sei als Anfangsbedingung ω 1 (t0 ) ω2 (t0 ), ω3 (t0 ) vorgegeben, das heißt die Komponente ω1 soll zur Zeit t = t0 viel größer als die beiden
anderen sein. Man zeige mit Hilfe der Kreisgleichungen (18.27), dass dies dann auch so bleibt. Die Komponente ω1 (t) bleibt annähernd gleich, während die anderen Komponenten eine periodische Bewegung
mit kleiner Amplitude ausführen. Dasselbe gilt für ω3 (t0 ) ω1 (t0 ), ω2 (t0 ).
Je mehr wir uns von der 1- bzw. 3-Achse entfernen, desto länger werden die Schnittlinien, die vom Drehimpuls durchlaufen werden können. Wie man sich leicht überlegt, werden die Linien immer als ganzes
periodisch durchlaufen, und zwar in die durch die Pfeile an den Achsen angedeuteten Richtungen. Es gibt
nämlich nirgendwo außer an den Schnittpunkten mit den Achsen Fixpunkte, also Punkte, an denen die
Zeitableitungen aller drei Komponenten des Drehimpulses verschwinden.
Betrachten wir nun die diejenige Schnittkurve von Ellipsoid und Kugel, die sich für ρ 0 = ρ2 ergibt, also
für den Fall, dass Energie und Drehimpuls so eingestellt sind wie bei einer Rotation um die 2-Achse. Die
entsprechende Schnittlinie besteht, wie man in der Abbildung erkennt, aus vier Segmenten, die jeweils die
positive mit der negativen 2-Achse verbinden.
Wenn wir nun einen Anfangszustand vorgeben, für den ω ≈ ω 2 n2 ist, und folglich S ≈ ω2 θ2 n2 , so
werden wir in einem realen Experiment den Schnittpunkt mit der Achse nicht genau treffen. Also läuft
der Drehimpuls wieder auf einer durch den seinen Betrag und die Energie bestimmten Schnittlinie um.
Diesmal sieht diese Schnittlinie aber ganz anders aus. Sie bleibt nicht in der Nähe des Ausgangspunktes,
sondern läuft um das ganze Ellipsoid herum.
Wenn wir in der Nähe der positiven 2-Achse starten, dann werden wir nach einer gewissen Zeit in der
Nähe der negativen 2-Achse ankommen, und schließlich zwischen diesen Punkten periodisch hin und her
pendeln. Mit welcher Frequenz dieses Pendeln erfolgt, und auf welchem der vier möglichen Wege der
Drehimpuls über das Ellipsoid wandert, hängt sehr kritisch von den Anfangsbedingungen ab. Nur, wenn
wir eine der vier Schnittlinien genau treffen würden, würde sich der Zustand für große Zeiten einem der
beiden Achsen asymptotisch nähern und dort verbleiben. Aber das ist im realen Experiment natürlich auch
ausgeschlossen.
Aus einem Anfangszustand mit S ≈ S2 n2 entwickelt sich also nach einer gewissen Zeit ein Zustand
mit S ≈ −S2 n2 . Nun ist aber in Wirklichkeit nicht der Vektor S zeitabhängig, sondern der körperfeste
Basisvektor n2 . Vom raumfesten Bezugssystem aus gesehen kippt also nicht der Drehimpuls um, sondern
die Körperachse n2 . Das ist genau das merkwürdige Phänomen, dass wir im Experiment in Abbildung 18.1
beobachtet haben. Es wird also durch die Kreiselgleichungen erklärt.
Aufgabe 18.12 Auch hier kann eine quantitative Analyse genauere Informationen liefern. Es sei als Anfangsbedingung ω2 (t0 ) ω1 (t0 ), ω3 (t0 ) vorgegeben. Man zeige, dass sich in diesem Fall aus den Kreiselgleichungen keine Umlaufbewegung von ω1 (t) und ω3 (t) ergibt, sondern ein exponentieller Anstieg. Diese
Komponenten blieben nicht klein, sondern laufen innerhalb einer charakteristischen Zeitskala τ davon.
Man zeige, dass die charakteristische Zeit τ , in der sich der Drehimpuls um einen Faktor e weiter von der
2-Achse entfernt, durch
θ1 θ3
1
τ2 =
(18.39)
(θ1 − θ2 ) (θ2 − θ3 ) ω2 2
209
gegeben ist. Zur Abschätzung der Größenordnungen machen wir die realistische Annahme θ1 : θ2 : θ3 =
4 : 3 : 2, und dass es uns gelingt, die 2-Achse bis auf 5◦ genau zu treffen. Man zeige, dass dann die
Taumelbewegung bereits nach etwa einer Umdrehung einsetzt. Wie genau muss man die Achse treffen,
wenn das Taumeln erst nach etwa zehn Umdrehungen des Körpers einsetzen soll?
Der symmetrische Kreisel
Unter seinem symmetrischen Kreisel versteht man einen starren Körper, der zwei gleiche Trägheitsmomente besitzt. Typische solche Körper sind Zylinder oder Quader mit quadratischer Grundfläche. Da ein
symmetrischer Kreisel meist ein Körper ist, der eine Rotationssymmetrie um eine Achse besitzt, bezeichnet man diese Achse auch als Figurenachse. Dies sei im folgenden die 3-Achse im körperfesten Koordinatensystem. Die Ausrichtungen der anderen beiden, zur Figurenachse senkrecht stehenden Hauptachsen
muss man willkürlich festlegen.
Für die Trägheitsmomente gilt dann θ1 = θ2 = θ0 , wobei wir θ0 als Bezeichnung verwenden, damit
die folgenden Formeln etwas “symmetrischer” aussehen. Es ist nützlich, die folgenden drei Fälle zu unterscheiden,
θ0 > θ 3 ,
θ0 = θ 3 ,
θ0 < θ 3 .
(18.40)
Der erste Fall liegt dann vor, wenn der Körper eher die Form einer Zigarre hat. Dann ist das Trägheitsmoment um die Figurenachse kleiner als die beiden anderen. Der zweite Fall entspricht einem kugelsymmetrischen Kreisel, dessen Bewegungsgleichungen schon in Aufgabe 18.5 gelöst wurden. Wir werden diesen
Fall hier nicht weiter betrachten. Im dritten Fall hat der Körper eher die Form eines Tellers. Hier ist das
Trägheitsmoment um die Figurenachse das größte.
Aufgabe 18.13 Welcher Fall liegt beim Rad aus Abbildung 12.3 vor und welche Werte haben dort θ 0 und
θ3 ?
Setzen wir in die Kreiselgleichungen (18.27) die Trägheitsmomente θ 1 = θ2 = θ0 und θ3 ein, so vereinfachen sich diese zu
θ0 ω̇1 (t) = (θ0 − θ3 ) ω2 (t) ω3 (t),
θ0 ω̇2 (t) = (θ3 − θ0 ) ω3 (t) ω1 (t),
θ3 ω̇3 (t) = 0.
(18.41)
Die Komponente der Winkelgeschwindigkeit in Richtung der Figurenachse ist somit konstant. Damit
können wir leicht die allgemeine Lösung der Kreiselgleichungen angeben. Es ist
ω1 (t) = σ0 cos(γ t + ϕ0 ),
ω2 (t) = σ0 sin(γ t + ϕ0 ),
ω3 (t) = σ3 ,
(18.42)
mit
θ3 − θ 0
σ3 .
(18.43)
θ0
Als Integrationskonstanten treten σ0 , σ3 und ϕ0 auf. Sie sind aus den Anfangsbedingungen zu bestimmen.
Die Winkelgeschwindigkeit läuft in körperfesten Koordinatensystem auf einem Kreis um die Figurenachse
um. Die Umlauffrequenz ist γ und hängt vom Verhältnis θ0 : θ3 ab.
Wir können auch die Komponenten des Drehimpulses angeben. Sie sind
γ=
S1 (t) = θ0 σ0 cos(γ t + ϕ0 ),
S2 (t) = θ0 σ0 sin(γ t + ϕ0 ),
S3 (t) = θ3 σ3 .
(18.44)
Auch der Drehimpuls läuft auf einem Kreis um die Figurenachse. Das sehen wir auch in Abbildung 18.2(b). Sind zwei der drei Trägheitsmomente gleich, so ist das Ellipsoid, das einer bestimmten
Energie entspricht, rotationssymmetrisch um die Figurenachse. Folglich sind die Schnittlinien mit einer
Kugel Kreise, deren Mittelpunkt auf der Figurenachse liegen.
210
replacements
3
3
(c)
(d)
θ0 ω
(θ3 − θ0 ) σ3 n3
(θ3 − θ0 ) σ3 n3
S
ω
θ0 ω
n3
n3
S
ω
θ0 < θ 3
θ0 > θ 3
1
n1
n1
1
(b)
(a)
Abbildung 18.3: Winkelgeschwindigkeit und Drehimpuls eines symmetrischen Kreisels im körperfesten
Koordinatensystem. Für einen zigarrenförmigen Kreisel (a) liegt ω zwischen S und n 3 , für einen tellerförmigen Kreisel liegt S zwischen ω und n 3 .
Durch eine geeignete Wahl dieses Koordinatensystems können wir die Integrationskonstanten auch noch
weiter einschränken. Wir schließen den trivialen Fall σ3 = 0 aus. In diesem Fall rotiert der Körper einfach
gleichmäßig um eine zur Figurenachse senkrecht Hauptachse. Da wir dann noch die Freiheit haben, die
Richtung der Figurenachse n3 zu wählen, also gegebenenfalls n3 durch −n3 zu ersetzen, können wir stets
erreichen, dass σ3 > 0 ist. ferner können wir durch Drehen der beiden anderen Hauptachsen erreichen,
dass zum Zeitpunkt t = 0 die Winkelgeschwindigkeit in der positiven 1-3-Ebene liegt, was äquivalent zu
ϕ0 = 0 und σ0 > 0 ist.
Damit fällt eine Integrationskonstante weg. Es bleiben nur die Parameter σ 0 > 0 und σ3 > 0, und die
daraus abgeleitete Größe γ. Es gilt für die Winkelgeschwindigkeit
ω1 (t) = σ0 cos(γ t),
ω2 (t) = σ0 sin(γ t),
ω3 (t) = σ3 ,
(18.45)
und für den Drehimpuls
S1 (t) = θ0 σ0 cos(γ t),
S2 (t) = θ0 σ0 sin(γ t),
S3 (t) = θ3 σ3 .
(18.46)
Wir schauen uns die Situation zum Zeitpunkt t = 0 in der 1-3-Ebene an, die in Abbildung 18.3 dargestellt
ist. Wie man leicht sieht, gilt sogar zu jedem Zeitpunkt
S = θ0 ω + (θ3 − θ0 ) σ3 n3 .
(18.47)
Die Vektoren n3 , ω und S liegen also stets in einer Ebene, und zwar sogar in einem Quadranten der Ebene.
Ihre Lage zueinander hängt jedoch vom Vorzeichen von θ 3 − θ0 ab.
Im Prinzip ist es nun möglich, auch die Bewegungsgleichungen für die Vektoren n a (t) zu lösen, um
so letztlich die Bewegungen des Körpers zu beschreiben. Aus den expliziten Lösungen lässt sich aber nur
wenig ablesen. Wir wollen daher versuchen, die Lösung grafisch zu bestimmen, um einen anschauliche
Vorstellung von den Bewegungen eines symmetrischen Kreisels zu bekommen.
Wir wechseln dazu vom körperfesten Bezugsystem in des raumfeste Bezugsystem. Das wählen wir
so, dass die Vektoren n3 , ω und S zum Zeitpunkt t = 0 in der x-z-Ebene liegen. Außerdem soll der
Drehimpuls S in Richtung der z-Achse zeigen. Da dieser Vektor zeitlich konstant ist, wird er dann immer
211
z
replacements
z
S
ω
S
ω
n3
(c)
(d)
n3
x
x
(a)
(b)
Abbildung 18.4: Drehimpuls S, Winkelgeschwindigkeit ω und Figurenachse n 3 eines symmetrischen
Kreisels im raumfesten Koordinatensystem. Alle drei Vektoren liegen stets in einer Ebene, die sich um
den konstanten Drehimpulsvektor dreht. Legt man um den Drehimpuls einen raumfesten Spurkegel, und
um die Figurenachse einen körperfesten Polkegel so, dass sich diese beiden Kegel auf einer Geraden
schneiden, die in Richtung der Winkelgeschwindigkeit zeigt, so rollt der Polkegel um den Spurkegel ab.
in diese Richtung zeigen. Schließlich soll sich der Schwerpunkt des Körpers im Ursprung befinden und
nicht bewegen.
Wir unterscheiden außerdem wieder zwischen einem zigarrenförmigen Körper und einem tellerförmigen Körper. Die beiden Fälle sind in Abbildung 18.4 entsprechend der Unterscheidung in Abbildung 18.3
dargestellt. Betrachten wir zuerst den zigarrenförmigen Kreisel in Abbildung 18.4(a). In diesem Fall liegen
alle drei Vektor im positiven x-z-Quadranten, wobei ω zwischen S und n 3 liegt.
Wie sieht die Zeitentwicklung dieser Vektoren aus? Alle drei Vektoren liegen stets in einer Ebene.
Außerdem ist S konstant, und wie man leicht aus der oben angegebenen Lösung im körperfesten System
entnimmt, sind die Winkel zwischen den drei Vektoren ebenfalls zeitlich konstant. Also bleibt als einzig
mögliche Bewegung eine gemeinsame Drehung von n1 und ω um die z-Achse, also um den Drehimpuls.
Dieses Phänomen heißt Präzession. Dreht sich ein symmetrischer Kreisel so, dass sein Drehimpuls nicht
genau in die Richtung der Figurenachse oder in eine dazu senkrechte Richtung, dann läuft die Figurenachse
periodisch um den Drehimpuls um. Die Kreisfrequenz, mit der das geschieht, nennt man Präzessionsfrequenz. Um sie zu berechnen, müssen wir uns zunächst überlegen, wie sich eigentlich der Körper selbst
bewegt.
Um das herauszufinden, genügt es zu wissen, dass zu jedem Zeitpunkt diejenigen Punkte des Körpers
in Ruhe sind, die sich gerade auf der momentanen Drehachse befinden. Das ist die Achse, die durch die
Winkelgeschwindigkeit festgelegt wird. Die Winkelgeschwindigkeit läuft auf einem Kegel um die z-Achse
um, den wir als Spurkegel bezeichnen. Der Öffnungswinkel dieses Kegels ist der Winkel zwischen S und
ω. Wir stellen uns diesen Kegel als im Raum fixiert vor.
Nun konstruieren wir einen zweiten Kegel. Die Achse dieses Kegels ist die Figurenachse n 3 , und sein
Öffnungswinkel ist der Winkel zwischen n3 und ω. Diesen Kegel nennen wir Polkegel und stellen uns vor,
dass er fest mit dem rotierenden Körper verbunden ist. Die beiden Kegel sind so gemacht, dass sie sich
entlang einer Halbgeraden berühren. Das ist genau die Halbgerade, die von der Winkelgeschwindigkeit ω
aufgespannt wird.
Was passiert nun, wenn der Körper sich bewegt? Da alle Punkt auf der Schnittlinie der beiben Kegel in
212
Ruhe sein müssen, ist die einzig mögliche Bewegung des Polkegels ein abrollen auf dem Spurkegel. Wie
man sich leicht überlegt, bleiben dabei die drei Vektoren tatsächlich stets in einer Ebene, und es sind immer
genau die Punkte des Körpers in Ruhe, die sich gerade auf der Schnittlinie der beiden Kegel befinden.
Die Schlussfolgerung ist, dass die Bewegungen eines zigarrenförmigen symmetrischen Kreisels durch
das Abrollen eines Kegels auf einem anderen Kegel beschrieben werden können. Der eine Kegel steht fest
im Raum, der andere ist fest mit dem Körper verbunden. Für einen tellerförmigen Kreisel sieht es ganz
ähnlich aus. Der einzige Unterschied ist, wie man in Abbildung 18.4(b) sieht, dass hier der Polkegel mit
seiner Innenseite am Spurkegel abrollt, weil die Anordnung der drei Vektoren verschieden ist.
Aufgabe 18.14 Man berechne für die oben angegebene Lösung der Kreiselgleichungen mit den Integrationskonstanten σ0 und σ3 die Präzessionsfrequenz. Diese lässt sich durch eine einfache geometrische
Überlegung anhand der Abbildung 18.4 bestimmen. Entscheidend sind dabei die Öffnungswinkel der beiden Kegel. Warum ist die Kreisfrequenz γ nicht dasselbe wie die Pr äzessionsfrequenz?
Aufgabe 18.15 Die Erde ist in guter Näherung ein leicht tellerförmiger, symmetrischer Kreisel mit
θ3 ≈ 1.003θ0 . Die Winkelgeschwindigkeit zeigt jedoch nicht genau in Richtung der Figurenachse. W ürde
man am Nordpol die Punkte markieren, an denen die Figurenachse, der Drehimpuls und die Winkelgeschwindigkeit die Oberfläche durchstoßen, so würde man eine Abweichung von einigen Metern sehen, und
die Punkte würden sich langsam umkreisen. Wie sind die Punkte angeordnet? Welcher Punkt ist ortsfest,
und mit welcher Periode und in welche Richtung umkreisen ihn die anderen beiden Punkte?
Der Konfigurationsraum und die Drehgruppe
Der freie Kreisel kann natürlich auch im Rahmen der Lagrangeschen oder Hamiltonschen Mechanik beschrieben werden. Dazu müssen wir aber zuerst auf dem Konfigurationsraum Q geeignete Koordinaten
einführen, denn bis jetzt haben wir nur eine implizite Beschreibung dieses Raumes. Um eine Konfiguration festzulegen, müssen wir den Bezugsort r und die körperfeste Basis n a angeben. Das sind insgesamt 12
reelle Zahlen, nämlich die Komponenten ri und die Übergangsmatrizen Λai aus (17.12).
Der Körper hat aber nur 6 Freiheitsgrade, denn diese 12 reellen Größen sind nicht unabhängig. Die
Übergangsmatrizen Λai sind nämlich orthogonal, was auf 6 unabhängige Beziehungen zwischen den Einträgen führt. Ein Möglichkeit diese Einschränkungen zu berücksichtigen wäre, sie als Zwangsbedingungen
zu betrachten. Es ist aber einfacher, sie durch Einführung von geeigneten reduzierten Koordinaten zu eliminieren.
Wir müssen dazu die Lage des Körpers im Raum durch drei unabhängige Koordinaten festlegen. Man
verwendet dazu die Eulerschen Winkel, die wir aus einem anderen Zusammenhang bereits kennen. Wir
haben sie nämlich benutzt, um den Konfigurationsraum des Rades aus Abbildung 12.3 zu beschreiben.
Dies war bereits ein einfaches Beispiel für einen starren Körper.
In Abbildung 18.5 ist die Definition dieser Winkel noch einmal in einer etwas anderen Form dargestellt.
Wir beginnen mit einem Körper, dessen Hauptachsen entlang der drei Koordinatenachsen ausgerichtet
sind, also die 1-Achse entlang der x-Achse, die 2-Achse entlang der y-Achse und die 3-Achse entlang der
z-Achse. Nun drehen wir den Körper wie in der Abbildung (a) gezeigt um einen Winkel ϕ um die 3-Achse
des Körpers, die bis jetzt noch mit der z-Achse identisch ist. Die gedrehten Körperachsen sind dann
n001 = cos ϕ ex + sin ϕ ey ,
n002 = − sin ϕ ex + cos ϕ ey ,
n003 = ez .
(18.48)
Im zweiten Schritt drehen wir den Körper um die neue 2-Achse um einen Winkel ϑ. Das Ergebnis ist in
der Abbildung (b) dargestellt. Die Körperachsen sind jetzt
n01 = cos ϑ n001 − sin ϑ n003 ,
n02 = n002 ,
213
n03 = sin ϑ n001 + cos ϑ n003 .
(18.49)
z
z
n003
z
ϑ
n2
n03
n3
χ
n001
y
ϕ
x
n002
ϕ
y
ϑ
(a)
x
n02
n01
y
x
n1
(b)
(c)
χ
Abbildung 18.5: Die Eulerschen Winkel zu Bestimmung der Lage eines starren Körpers im Raum. Der
Körper liegt zuerst so, dass seine Hauptachsen mit den Koordinatenachsen übereinstimmen. Dann erfolgt
eine Drehung um die 3-Achse um den Winkel ϕ = −40 ◦ (a), anschließend eine Drehung um die 2Achse um den Winkel ϑ = 50◦ (b), und schließlich wieder eine Drehung um die 3-Achse um den Winkel
χ = 70◦ (c).
Schließlich drehen wir den Körper noch einmal um die 3-Achse, und zwar um einen Winkel χ. Die resultierenden Körperachsen in der Abbildung (c) sind
n1 = cos χ n01 + sin χ n02 ,
n2 = − sin χ n01 + cos χ n02 ,
n3 = n03 .
(18.50)
Um zu zeigen, dass wir auf diese Weise tatsächlich jede mögliche Lage des Körpers im Raum erfassen,
betrachten wir zuerst den Vektor n3 . Wenn wir die Drehungen ineinander einsetzen, finden wir
n3 = n03 = sin ϑ n001 + cos ϑ n003 = sin ϑ cos ϕ ex + sin ϑ sin ϕ ey + cos ϑ ez .
(18.51)
Das ist der bekannte radiale Einheitsvektor in Kugelkoordinaten. Wir können also die 3-Achse des Körpers
in jede beliebige Richtung des Raumes ausrichten. Den Wertebereich von ϑ können wir dabei auf 0 ≤ ϑ ≤
π einschränken, und ϕ ist wie üblich periodisch, ϕ ≡ ϕ+2π. Da die letzte Drehung auf die 3-Achse keinen
Einfluss mehr hat, können wir den Körper anschließend noch in jede mögliche Lage drehen, nachdem wir
die 3-Achse fixiert haben. Natürlich ist dann auch χ eine periodische Koordinate mit χ = χ + 2π.
Aufgabe 18.16 Man bestätige durch Einsetzen die folgenden Ausdrücke für die beiden anderen Basisvektoren. Es gilt
n1 = (cos ϑ cos ϕ cos χ − sin ϕ sin χ) ex + (cos ϑ sin ϕ cos ϑ + cos ϕ sin χ) ey − cos χ sin ϕ ez ,
n2 = −(cos ϑ cos ϕ sin χ + sin ϕ cos χ) ex − (cos ϑ sin ϕ sin ϑ − cos ϕ cos χ) ey + sin χ sin ϕ ez ,
n3 = sin ϑ cos ϕ ex + sin ϑ sin ϕ ey + cos ϑ ez .
(18.52)
Wie sieht nun der Konfigurationsraum Q aus? Können wir ihn in irgendeiner Form anschaulich beschreiben? Zunächst können wir sechs Koordinaten (x, y, z, ϑ, ϕ, χ) einführen, wenn wir den Ort des Bezugspunktes in durch
r = o + x e x + y ey + z ez
(18.53)
darstellen. Es ist aber nicht einfach ein sechsdimensionaler affiner Raum, denn die Koordinate ϑ läuft ja
nur von 0 bis π, und die anderen Winkelkoordinaten sind periodisch. Wir betrachten die Stellen ϑ = 0 und
214
ϑ = π im Konfigurationsraum etwas genauer. Für ϑ = 0 ergibt sich aus (18.52)
n1 = cos(χ + ϕ) ex + sin(χ + ϕ) ey ,
n2 = − sin(χ + ϕ) ex + cos(χ + ϕ) ey ,
n3 = e z .
(18.54)
Das ergibt sich auch aus der Darstellung in Abbildung 18.5. Wenn die mittlere Drehung wegfällt, addieren
sich die Drehwinkel ϕ und χ. Der Körper wird nur um die z-Achse gedreht. Offenbar ist für ϑ = 0 eine
der beiden anderen Koordinaten redundant. Nur die Summe χ + ϕ ist für die Lage des Körpers relevant.
Ganz ähnlich sieht es für ϑ = π aus. Dann gilt nämlich
n1 = − cos(χ − ϕ) ex + sin(χ − ϕ) ey ,
n2 = sin(χ − ϕ) ex + cos(χ − ϕ) ey ,
n3 = −ez
(18.55)
Hier ist nur die Differenz χ − ϕ relevant. Auch das lässt sich in der Abbildung 18.5 erkennen. Die mittlere
Drehung ist in diesem Fall eine Drehung um 180◦ , bei der die z-Achse umgekippt wird. Dadurch kommt es
zu ein paar veränderten Vorzeichen der Winkelfunktionen, und die Drehwinkel ϕ und χ sind voneinander
abzuziehen.
Daraus ergibt sich die folgende Möglichkeit, den Konfigurationsraum zu beschreiben. Für 0 < ϑ < ϕ
sind die Koordinaten ϕ und χ jeweils periodisch mit einer Periode von 2π, aber ansonsten treten keine
Redundanzen auf. Wir können uns daher eine Schar von Tori vorstellen, einen für jedes ϑ, und uns auf
diesen Tori jeweils die Koordinatenlinien von ϕ und χ als umlaufende Kreise vorstellen. An den Rändern
dieses Intervalls schrumpft der Torus dann jeweils zu einem Ring zusammen, denn dort ist nur noch eine
der beiden Koordinaten relevant.
Sehr anschaulich ist diese Vorstellung aber noch nicht. Überraschenderweise gibt es noch eine einfachere Darstellung. Der Konfigurationsraumes ist nämlich eine dreidimensionale Sph äre, oder genauer um
eine projektive Sphäre. Wir definieren zunächst, was das ist, und zeigen dann, das der Konfigurationsraum
des starren Körpers tatsächlich so aussieht.
Die dreidimensionale Sphäre definieren wir als Teilmenge des R4 ,
S3 = {
(u1 , u2 , u3 , u4 ) ∈ R4 ,
u12 + u22 + u32 + u42 = 1 }.
(18.56)
Natürlich könnten wir die Sphäre S3 auch als Mannigfaltigkeit ohne eine solche Einbettung definieren.
Aber in dieser Form ist die folgende Herleitung ein wenig einfacher. Die projektive Sph äre, oder der
projektive dreidimensionale Raum RP3 ergibt sich daraus, indem man die antipodischen Punkte der Sphäre
miteinander identifiziert. Man führt eine Äquivalenzrelation ∼ ein, mit
(u1 , u2 , u3 , u4 ) ∼ (−u1 , −u2 , −u3 , −u4 ),
(18.57)
und definiert RP3 = S3 /∼ als Quotientenraum.
Aufgabe 18.17 Eine alternative Definition des dreidimensionalen projektiven Raumes geht von der Menge
R4 − (0, 0, 0, 0) aus und definiert die Äquivalenzrelation (u1 , u2 , u3 , u4 ) ∼ (k u1 , k u2 , k u3 , k u4 ) für alle
k ∈ R − {0}. Dann setzt man RP3 = (R4 − (0, 0, 0, 0))/∼. Der projektive dreidimensionale Raum ist in
diesem Sinne die Menge aller Geraden durch den Ursprung im R 4 . Man zeige, dass diese Definition zu
der obigen äquivalent ist.
Nun definieren wir eine Abbildung vom Konfigurationsraum des starren Körpers in die Mannigfaltigkeit
S3 /∼. Dazu setzen wir
ϑ χ−ϕ
ϑ χ−ϕ
u1 = sin
cos
,
u2 = sin
sin
,
2
2
2
2
ϑ χ+ϕ
ϑ χ+ϕ
u3 = cos
cos
,
u4 = cos
sin
.
(18.58)
2
2
2
2
215
Zunächst überzeugen wir uns davon, dass die Abbildung wohldefiniert ist. Man sieht leicht, dass die Summe der Quadrate dieser Ausdrücke gleich Eins ist, so dass die Abbildung tatsächlich in die Sphäre erfolgt.
Aber ist sie auch eindeutig?
Wenn ϑ von 0 bis π läuft, läuft sin(ϑ/2) von 0 bis 1 und cos(ϑ/2) von 1 bis 0. Die ersten Faktoren sind
also stets positiv, wobei u1 und u2 bei ϑ = 0 verschwinden, während u3 und u4 bei ϑ = π verschwinden.
Gleichzeitig sehen wir, dass an diesen Stellen die beiden verbleibenden Koordinaten nur von χ + ϕ bzw.
χ − ϕ abhängen. Die Abbildung hat also genau dieselben Redundanzen wie die Eulerschen Winkel bei
der Darstellung der Lage des Körpers in Raum. Dasselbe gilt für die Periodizität von ϕ und χ. Addieren
wir 2π zu einer dieser beiden Koordinaten, so ändern sich jeweils die Vorzeichen aller vier u’s. Da wir
antipodische Punkte auf der Sphäre identifiziert haben, sind das aber dieselben Punkte in S 3 /∼.
Ebenso leicht lässt sich zeigen, dass die Abbildung umkehrbar und somit bijektiv ist. Zunächst bestimmen wir ϑ eindeutig durch die Gleichung
tan
2
ϑ
u12 + u22
.
= 2
2
u3 + u42
(18.59)
Anschließend ergeben sich die Winkel χ−ϕ und χ+ϕ wie üblich in einem ebenen Polarkoordinatensystem
aus den Größen (u1 , u2 ) bzw. (u3 , u4 ), wobei wieder die bekannte Redundanz auftritt, wenn u1 = u2 = 0
bzw. u3 = u4 = 0 ist.
Auch wenn die Zuordnung (18.58) zwischen den Lagen eines Körpers im Raum zu den Punkten auf
der projektiven Sphäre S3 /∼ keine unmittelbare geometrische Interpretation hat, können wir uns nun
zumindest ein anschauliches Bild von dem Konfigurationsraum Q eines starren Körpers machen. Wenn
wir von der Bewegung des Bezugspunktes absehen und nur die Drehbewegung betrachten, so ist es eine
dreidimensionalen Sphäre, bei der gegenüberliegende Punkte identifiziert wurden.
Diese Beobachtung ist deshalb von einem gewissen Interesse, weil dieser Konfigurationsraum nichts
anderes ist als die spezielle orthogonale Gruppe SO(3). Wie wir bereits an anderer Stelle bemerkt haben,
wird nämlich die Beziehung zwischen der körperfesten Basis n a und einer raumfesten Basis ei durch eine
orthogonale Transformation dargestellt. Da wir den Körper dabei nicht spiegeln können, muss dies eine
Transformation mit der Determinante +1 sein, die durch ein Element aus der Gruppe SO(3) dargestellt
wird.
Wir haben also auch eine anschauliches Beschreibung der Drehgruppe SO(3) als Mannigfaltigkeit gefunden, und wir haben sogar ein Koordinatensystem auf dieser Gruppe eingeführt. Die Gruppe SO(3)
ist eine dreidimensionale Sphäre, auf der gegenüberliegende Punkten identifiziert sind, und die Eulerschen Winkel stellen ein Koordinatensystem auf dieser Mannigfaltigkeit dar. Allerdings mit ein paar Einschränkungen, die denen eines Kugelkoordinatensystems auf der Sphäre S 2 entsprechen. Die Koordinaten
sind teilweise redundant.
Aufgabe 18.18 Die Gruppe SU(2) ist die Menge aller unitären komplexen 2×2-Matrizen, also Matrizen
der Form
a b
U=
mit a, b, c, d ∈ C, U U † = I,
(18.60)
c d
wobei U † die hermitesch konjugierte Matrix ist, die sich durch Transposition und komplexe Konjugation
ergibt, also
∗ ∗ a b
a c
†
U=
⇒ U =
.
(18.61)
c d
b∗ d ∗
Man beweise die folgenden Aussagen. Die Gruppe SU(2) ist dreidimensional und l ässt sich durch eine
einfache Darstellung der Einträge a, b, c, d als Funktionen von vier reellen Zahlen u1 , u2 , u3 , u4 bijektiv
auf die Sphäre S3 ⊂ R4 abbilden. Die Sphäre S3 ist also selbst eine Gruppe, nämlich die Matrixgruppe
SU(2). Die Gruppe SO(3) ergibt sich als Quotientengruppe SU(2)/∼ wobei U ∼ U 0 genau dann gilt,
216
wenn U 0 = −U ist. Jedem Element der Drehgruppe SO(3) entsprechen folglich genau zwei Elemente der
Gruppe SU(2), die sich durch das Vorzeichen der Matrizen unterscheiden. Dieser Umstand wird in der
Quantenmechanik eine zentrale Rolle spielen.
217