Entscheidungsleiter nach Rasmussen
Werbung

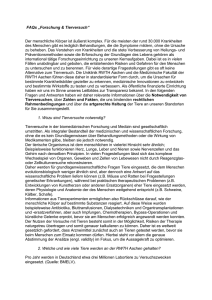
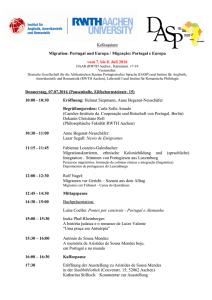
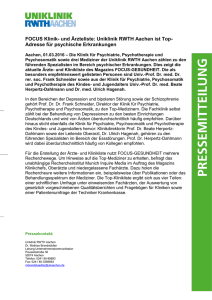
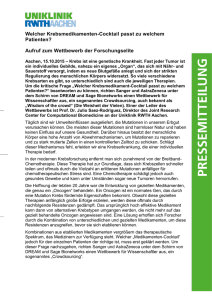
Ergonomie und Mensch-Maschine-Systeme (Arbeitswissenschaft II) Lehreinheit 7 Cognitive Engineering I Sommersemester 2016 Dr.-Ing. Dr. rer. medic. Dipl.-Inform. Alexander Mertens Lehrstuhl und Institut für Arbeitswissenschaft RWTH Aachen Bergdriesch 27 52062 Aachen Tel.: 0241 80 99 494 E-Mail: [email protected] © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Lernziele Ziel dieser Lehrveranstaltung ist es: Engineering-Modelle menschlicher Informationsverarbeitung als Grundlage der Gestaltung komplexer Mensch-Maschine Systeme kennen zu lernen, Problemstellungen in Bezug auf menschliche Fehler zu erkennen, Cognitive Engineering von verwandten Forschungsgebieten abgrenzen zu können, Einblick in qualitative und quantitative Modelle menschlicher Informationsverarbeitung zu erhalten. © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7-2 Problemstellung: Beispiele für menschliche Fehler Mensch Mensch unvorhersehbar Maschine Umwelt Maschine Zwischenwirkungen Umwelt Gefährdung Atomare Störfälle in: Ursache: - Oyster Creek (1979) Schließen von falschen Ventilen - Three Mile Island (1979) Fehlinterpretation von Kontrollanzeigen - Davis Besse (1985) Drücken von falschen Knöpfen auf Kontrolltafel - Tschernobyl (1986) Betrieb des Reaktors im falschen Betriebspunkt - Tokaimura (1999) Arbeiter füllen das sechsfache der zulässigen Menge in das Reaktionsgefäß „Gemeinsam ist den bisherigen Großunfällen, dass sie durch menschliches Versagen ausgelöst wurden von Betriebsmannschaften, von Konstrukteuren oder von allen zusammen.“ [Faktor Mensch - Der Spiegel 4.10.99] © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7-3 V8-1 Definition „Cognitive Engineering“ Gegenstand von Cognitive Engineering ist die Entwicklung von Konzepten, Methoden und Werkzeugen zur Analyse, Modellierung und Gestaltung von komplexen Mensch-Maschine Systemen, in denen die menschliche Informationsverarbeitung auf höheren kognitiven Ebenen im Sinne einer Engpassbetrachtung eine besondere Rolle spielt. Dabei wird stets das Gesamtsystem betrachtet, indem „top-down“ die Gesamtziele und Randbedingungen durch entsprechende Funktionen abgebildet werden. Gegenstand empirischer Untersuchungen sind Problemlöse- und Entscheidungsprozesse in realen Arbeitssituationen. Abgrenzung zur Mensch-Rechner-Interaktion: Systemgestaltung eher technologiegeleitet mit separat optimierten Funktionalitäten (z. B. Textverarbeitung, Spreadsheet etc.) Fokus eher auf syntaktischen, lexikalischen und physikalischen Aspekten Abgrenzung zur künstlichen Intelligenz (KI): Simulation kognitiver Leistungen in Laborumgebungen bzw. „Mikro-Welten“ Fokus auf kalkulierbare Aspekte menschlicher Informationsverarbeitung mit abgegrenzten kognitiven Subsystemen (Langzeit-, Kurzzeitgedächtnis etc.) Quelle: Rasmussen (1988, 1994) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7-4 Modelle des Cognitive Engineering Qualitative Modelle Skills Rules Knowledge (Rasmussen, 1983) Decision Step Ladder (Rasmussen, 1994) Abstraktionshierarchie (Rasmussen, 1985) Hierarchische Handlungsregulation (Hacker, 1986) Recognition-Primed Decision (Klein, 1989) Ermöglichen qualitatives Beschreiben von Verhalten auf Basis von theoretischen Grundannahmen Quantitative Modelle Model Human Processor (Card, Moran, Newell, 1983) ACT-R (Anderson, 1993, 2003) SOAR (Newell 1990) Human Cognitive Reliability Model (HCR; Hannamann, 1988) COSIMO (Cacciabue, 1993, 2003) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Ermöglichen quantitative Vorhersagen von Verhalten auf Basis von Entscheidungsvariablen 7-5 Regulationsebenen menschlicher Leistung: Das 3-Ebenen-Modell nach Rasmussen Wissensbasiertes Verhalten Ziele Symbole Identifizieren Entscheiden Planen • Strukturiertes Mentalmodell für unbekannte Situationen • Vorwärts- u. Rückwärtsverkettung beim Schlussfolgern • Bewusste Handlungsregulation Zeichen Regelbasiertes Verhalten Erkennen Merkmalsfunktion Sensorischer Input © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Assoziieren (Signale) Regeln Sensumotorische Muster Signale Handlungen • Heuristiken, „Kochrezepte“ für bekannte Situationen • Vorwärtsverkettung (WennDann) • Bewusste Handlungsregulation Fertigkeitsbasiertes Verhalten • Erlernte oder intuitive sensumotorische Muster • Unbewusste Handlungsregulation 7-6 Das 3-Ebenen-Modell nach Rasmussen Beispiel 1 Wissensbasiertes Verhalten Symbole Wenn der Zeiger nach der Kalibrierung Wissensbasiertes immer noch in Position B ist, könnte ein Verhalten Leck vorliegen (funktional denken) Ziele Identifizieren Symbol Entscheiden Planen • Strukturiertes Mentalmodell für unbekannte Situationen • Vorwärts- u. Rückwärtsverkettung beim Schlussfolgern • Bewusste Handlungsregulation Regelbasiertes Verhalten Zeichen (stereotype Handlung) Erkennen Merkmalsfunktion Assoziieren Regeln WENN das Ventil offen ist UND ...WENN Position C, DANN ist Fluss o.k., Position D, DANN mindere Fluss • Heuristiken, „Kochrezepte“ ...WENN für bekannte Situationen WENN das Ventil geschlossen ist UND • Vorwärtsverkettung (WennDann) ...WENN Position A, DANN ist Fluss o.k., • Bewusste Handlungsregulation ...WENN Position B, DANN rekalibriere (Signale) Sensorischer Input Sensumotorische Muster Signale Handlungen Fertigkeitsbasiertes Verhalten Zeichen Regelbasiertes Verhalten Fertigkeitsbasiertes Signal Verhalten - Flusspunkt (Set point) halten vom Flusspunkt • Erlernte oder intuitive - Verwende Abweichung sensumotorische Muster als Fehlersignal • Unbewusste Handlungsregulation - Führe kontinuierlich nach Quelle: Rasmussen (1983) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7-7 Planen • Strukturiertes Mentalmodell für unbekannte Situationen Hypothese: • Vorwärts- u. Rückwärtsverkettung beim Schlussfolgern Handlung: • Bewusste Handlungsregulation Regelbasiertes Verhalten Symbole Entscheiden Merkmalsfunktion Assoziieren (Signale) Sensorischer Input © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Regeln Sensumotorische Muster Signale Handlungen Gashebelstellung maximal Treibstoffzufuhr gehemmt auf anderen Tank umschalten Steigwinkel proportional zur Fluggeschwindigkeit WENN Flugzeug sinkt DANN • Heuristiken, „Kochrezepte“ für Geschwindigkeit steigern bekannte Situationen • Vorwärtsverkettung (WennDann) Motordrehzahl erhöhen • Bewusste Handlungsregulation Fertigkeitsbasiertes Verhalten Zeichen Regelbasiertes Verhalten Erkennen Für stabile Fluglage ist Motordrehzahl von ca. 3000 min-1 erforderlich. Wissensbasiertes Verhalten Symptome: Motordrehzahl zu niedrig Ziele Identifizieren Wissensbasiertes Verhalten Das 3-Ebenen-Modell nach Rasmussen Beispiel 2 (Regel). Durch Bewegungen des Steuerhorns Fertigkeitsbasiertes Steigratenanzeiger in Nulllage halten Verhalten (Sensumotorisches Muster). • Erlernte oder intuitive sensumotorische Muster (Ist die Geschwindigkeit zu niedrig, • Unbewusste Handlungsregulation es jedoch zum Überziehen (Stall) kommen.) 7-8 kann Das 3-Ebenen-Modell nach Rasmussen: Berücksichtigung von Reaktionszeit und Lerneffekten Regulationsebenen menschlicher Leistung Reaktionszeiten und Lernen Ziele Zeichen Symbole Identifizieren Erkennen Merkmalsfunktion Entscheiden Assoziieren (Signale) Sensorischer Input Planen Wissensbasiertes Verhalten Regeln Regelbasiertes Verhalten Sensumotorische Muster Fertigkeitsbasiertes Verhalten Reaktionszeit Signale Handlungen nach Hannamann (1988) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7-9 Das 3-Ebenen-Modell nach Rasmussen: Orientierung in der Stadt – Ein Beispiel für Lerneffekte Reaktionszeiten und Lernen Beispiel Unterstützung durch einen Stadtplan: horizontale bzw. vertikale Koordinaten; Norden, Süden, Osten, Westen bzw. oben, unten, rechts, links; Straßennamen, Distanzabschätzungen Wissensbasiertes Verhalten ausgewählte Punkte bzw. Punktfolgen als Wegmarken auswählen, z.B. „nach dem Passieren des Bahnhofs rechts halten“ oder „an der nächsten Hauptverkehrsstrasse links“ etc. Regelbasiertes Verhalten Fertigkeitsbasiertes Verhalten Reaktionszeit Die Angewiesenheit auf Hilfsmittel (extern bzw. intern), auf die kontrolliert und bewusst zugegriffen werden musste, entfällt Effekte sind abhängig von Nutzungserfahrung und -häufigkeit © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 10 Entscheidungsleiter („Decision Step Ladder“) nach Rasmussen (1986) Formales Entscheidungsmodell und Operationalisierung: Welches Gesamtziel ist zu wählen? Evaluieren Mehrdeutigkeit Wie ist die Wirkung auf das Gesamtsystem? Ultimatives Ziel Interpretieren Wie ist der Zielzustand der Anlage charakterisiert? Zielzustand Systemzustand Welche Ursachen Identifizieren sind möglich? Definiere Aufgabe Menge von Beobachtungen Welche Störung liegt vor? Welche Bedingungen sind zu ändern? Aufgabe Beobachten Wie ist bei der Formuliere Prozedur Behebung vorzugehen? Alarm Prozedur Aktivierung © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen AktionsWie ist die Prozedur ausführung auszuführen? 7 - 11 Entscheidungsleiter nach Rasmussen: Beispiel - Störfall in einem Wasserkraftwerk Im Fokus steht die Überlast bei Stromproduktion durch überhöhte Drehzahl der Laufradschaufeln unter Berücksichtigung von Kavitation (eine zu hohe Geschwindigkeit der Schaufeln führt nach Gesetz von Bernoulli zu so starkem Abfall des Wasserdrucks, dass der statische Druck unter den Verdampfungsdruck der Flüssigkeit fällt und sich Dampf- oder Gasblasen bilden). Kavitation erzeugender Propeller © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 12 Entscheidungsleiter nach Rasmussen: Beispiel - Störfall in einem Wasserkraftwerk Welches Gesamtziel ist zu wählen? Evaluieren Sicherung der Anlage bei Mehrdeutigkeit Wie ist die Wirkung auf das Gesamtsystem? Systemzustand Ultimatives Ziel fortlaufender Stromproduktion Interpretieren Systemüberlastung Drehzahl verringern durch (1) Änderung der Schaufelstellung oder (2) Druckreduktion Definiere Aufgabe Anzeigen prüfen auf Durchfluss, überhöhte Drehzahl der Laufradschaufeln, Probleme der Stellkörper in der Turbine o.ä. Menge von Beobachtungen ÜberwachungsBeobachten monitore kontrollieren Aktivierung (1) Optimaler Schaufelwinkel und nötige Bediensequenzen ermitteln, Produktionsausfall und Arbeitsschritte dokumentieren © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen rot blinkendes Warnsignal bzw. Warnton wahrnehmen Welche Bedingungen sind zu ändern? Aufgabe Wie ist bei der Formuliere Prozedur Behebung vorzugehen? Operateur erkennt: reibungsloser Ablauf behindert Alarm **Quelle: Sanderson (1991) Zielzustand Drehzahl im idealen Bereich Welche Ursachen Identifizieren überhöhte Drehzahl sind möglich? identifiziert Welche Störung liegt vor? Wie ist der Zielzustand der Anlage charakterisiert? Prozedur o.g. Prozeduren umsetzen AktionsWie ist die Prozedur ausführung auszuführen? 7 - 13 Entscheidungsleiter nach Rasmussen: Beispiel – Drohender Strömungsabriss im Steigflug Welches Gesamtziel ist zu wählen? Evaluieren Ultimatives Ziel Sicherer Flug Mehrdeutigkeit Wie ist die Wirkung auf das Gesamtsystem? Systemzustand von A nach B Interpretieren Wie ist der Zielzustand der Anlage charakterisiert? Zielzustand stabile Fluglage Flugstabilität gefährdet Geschwindigkeit Welche Ursachen Identifizieren im Steigflug zu sind möglich? Geschwindigkeit erhöhen Definiere durch (1) Anpassung Aufgabe niedrig Vortrieb/Fluglage oder (2) Steigflug abbrechen Anzeigen prüfen auf GeschwindigAnpassung keit, Höhe, Kurs, Druck o.ä. Vortrieb/Fluglage Menge von Beobachtungen Welche Störung liegt vor? Beobachten Überwachungsmonitore kontrollieren **Quelle: Sanderson (1991) - Stellung Luftbremsen prüfen Formuliere Prozedur - Schubhebel auf Volllast - Steigwinkel verringern - Geschwindigkeit einregeln Pilot erkennt: Shaker aktiviert, Strömungsabriss droht Alarm Aktivierung © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Welche Bedingungen sind zu ändern? akustisches/visuelles/haptisches Warnsignal wahrnehmen Aufgabe Wie ist bei der Behebung vorzugehen? Prozedur o.g. Prozeduren umsetzen AktionsWie ist die Prozedur ausführung auszuführen? 7 - 14 Entscheidungsleiter nach Rasmussen: Expertengeleitetes Entscheiden, Regulationsebenen Wissensbasiertes Verhalten • Strukturiertes Mentalmodell (Ziele, Funktionen, Ressourcen) für unbekannte Situationen • Bewusste Handlungsregulation • Vorwärts- u. Rückwärtsverkettung beim Schlussfolgern Evaluieren Mehrdeutigkeit Ultimatives Ziel Interpretieren Systemzustand Zielzustand Regelbasiertes Verhalten Identifizieren Menge von Beobachtungen • Heuristiken, „Kochrezepte“ für bekannte Situationen • Vorwärtsverkettung (WennDann) • Bewusste Handlungsregulation Definiere Aufgabe Erkennen im Sinne der Zustandsfeststellung Aufgabe Formuliere Prozedur Beobachten Fertigkeitsbasiertes Verhalten Alarm Prozedur • Erlernte oder intuitive sensumotorische Muster • Unbewusste Handlungsregulation Aktivierung © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Auslösen der vordefinierten Handlung zur Störungsbehebung Aktionsausführung 7 - 15 Entscheidungsleiter nach Rasmussen: Beispiel: Störungsbearbeitung mit Diagnoseunterstützung Anlagenhersteller Unterstützungssystem (z.B.) XPS 1. Anzeige der Störungsdaten Betreiber 2. Identifikation der Störung Menge von Beobachtungen SystemZustand Menge von Beobachtungen Aufgabe 3. Behebungsorder an Computer Alarm 4. Ausführung der Befehlssequenz © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Prozedur Prozedur 7 - 16 Abstraktionshierarchie nach Rasmussen* Gesamt-Teil-Relation Aggregation Mittel-Zweck-Relation Abstraktion Konkretisierung Gesamtsystem Subsystem Dekomposition Funktionale Einheit Baugruppe Funktionaler Zweck Abstrakte Funktion A Generalisierte Funktion B C Physikalische Funktion D E F Physische Form * Vicente & Rasmussen, 1992 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 17 Komponente Abstraktionshierarchie nach Rasmussen* Gesamt-Teil-Relation Aggregation Mittel-Zweck-Relation Abstraktion Konkretisierung Gesamtsystem Subsystem Funktionaler Zweck Abstrakte Funktion Generalisierte Funktion Physikalische Funktion Physische Form Dekomposition Funktionale Einheit Baugruppe A ist Grund für B A B dient dem Zweck A B ist verbunden mit C (kausal etc.) B C D D besteht aus E und F E F E und F sind Teile von D * Vicente & Rasmussen, 1992 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen Komponente 7 - 18 Anwendungsbeispiel aus der Verfahrenstechnik Gesamt-Teil-Relation Aggregation Gesamtsystem Subsystem Dekomposition Funktionale Einheit Baugruppe Anlage zur Erzeugung von Vinylchlorid Dekompositionshierarchie für die Verfahrensentwicklung (nach Foltz 2008) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 19 Komponente Anwendungsbeispiel aus der Verfahrenstechnik Gesamt-Teil-Relation Aggregation Mittel-Zweck-Relation Abstraktion Konkretisierung Gesamtsystem Funktionaler Zweck Zielkatalog, Anforderungsliste Abstrakte Funktion Abstrakter Funktionszusammenhang Generalisierte Funktion Standardfunktionszusammenhang Physikalische Funktion Wirkzusammenhang, Organstruktur Physische Form Bauzusammenhang Subsystem Dekomposition Funktionale Einheit Baugruppe (nach Foltz 2008) © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 20 Komponente Quantitative Beschreibung menschlichen Verhaltens: Model Human Processor Langzeitspeicher d = unendlich m = unendlich k = semantisch Arbeitsspeicher Visueller Speicher Auditiver Speicher d = 200 [70-1000] ms m= 17 [7-17] Buchstaben k = physikalisch d= 1500 [900-3000] ms m = 5 [4,4-6,2] Laute k = physikalisch m = 3 [2,5-4,1]chunks m* = 7 [5-9] chunks d = 7 [5-226] s d (1 chunk) = 73 [73-226] s d (3 chunk) = 7 [5-34] s k = akustisch oder visuell t : Zykluszeit d : Verfallszeit m : Kapazität k : Kodierung Perzeptiver Prozessor t = 100 [50-200] ms Kognitiver Prozessor t = 70 [25-170] ms Motorischer Prozessor t = 100 [50-200] ms Blickbewegung= 230 [70-700] ms © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 21 Quantitative Beschreibung menschlichen Verhaltens: GOMS und Keystroke Level Model (GOMS-KLM) KLM Operatoren K (Key) - Taste oder Knopf drücken 0,12 – 0,28 s B (Button) - Maustaste Drücken oder Loslassen: 0,10 s Klicken: 0,20 s P (Point) - Mauszeiger auf eine bestimmte Stelle bewegen durchschnittlich 1,10 s H (Home) - Hände in Ruhestellung (z.B. auf Tastatur oder Maus) bringen 0,40 s D (Draw) - Liniensegment zeichnen variabel M (Mental) - Mentale Vorbereitung einer Handlung 1,35 s R (Response) - Reaktionszeit des Systems; Benutzer wartet variabel © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 22 Lernerfolgsfragen Welche Modelle werden im Cognitive Engineering unterschieden? Welche Arten des menschlichen Verhaltens differenziert Rasmussen? In Welche Abstraktionsebenen ist die Abstraktionshierarchie nach Rasmussen gegliedert? Welche unterschiedlichen Prozessoren unterscheidet der Model Human Processor? © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 23 Weiterführende Literatur Card, S.K., Moran, T.P. & Newell, A.L. (1983). The psychology of human computer interaction. Hillsdale, NJ: Erlbaum. Flach, J., Hancock, P., Caird, J. & Vicente, K.: Global Perspectives on the Ecology of Human-Machine Systems. New York: Erlbaum. Foltz, C. (2008): Ein Cognitive-Engineering-Konzept zur Analyse und Gestaltung von kreativinformatorischer Arbeit in der verfahrenstechnischen Entwicklung. Schriftenreihe Industrial Engineering and Ergonomics. Shaker Verlag, Aachen Helander, M. (1988): Handbook of Human-Computer Interaction. New York: Elsevier Science Publishers. Pahl, G., Beitz, W., Feldhusen, J., & Grote, K. H. (2007). Pahl/Beitz Konstruktionslehre. 7. Aufl. Berlin: Springer. Rasmussen, J. (1983): Skills, Rules, and Knowledges; Signals, Signs, and Symbols, and Other Distinctions in Human Performance Models. IEEE Transactions on Systems, Man, and Cybernetics, Vol. SMC-13, No. 3. Rasmussen, J. (1986): Information processing and Human-Machine Interaction: An Approach to Cognitive Engineering. Amsterdam: North-Holland. Rasmussen, J., Pejtersen, A.M. & Goodstein, L. (1994): Cognitive Systems Engineering. New York: Wiley. Rouse, W.B. (1984): Advances in Man-Machine Systems Research, Vol. 5. Greenwich, CT: JAI Press. Wickens, C.D. & Hollands, J. (1999): Engineering Psychology and Human Performance. 3rd ed. New Jersey: Prentice Hall. © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen 7 - 24