Entwicklung eines effizienten Verfahrens zur Simulation
Werbung

Entwicklung eines effizienten Verfahrens
zur Simulation kompressibler
Strömungen in 3D auf Parallelrechnern
Bernhard Schupp
Institut für Angewandte Mathematik
Universität Freiburg
Dissertation
vorgelegt bei der
Mathematischen Fakultät
Universität Freiburg
Betreuer: Prof. Dr. D. Kröner
1999
2
1. Gutachter:
Prof. Dr. Dietmar Kröner
2. Gutachter:
Prof. Dr.-Ing. Hans Burkhardt
Dekan:
Prof. Dr. Wolfgang Soergel
Tag der mündlichen Prüfung:
20. Dezember 1999
3
Inhaltsverzeichnis
Einleitung
5
1 Simulation kompressibler Strömungen
13
1.1 Die Euler-Gleichungen der Gasdynamik . . . . . . . . . . . . . . 13
1.2 Numerisches Verfahren . . . . . . . . . . . . . . . . . . . . . . . 17
1.3 Gesamtalgorithmus
. . . . . . . . . . . . . . . . . . . . . . . . . 24
2 Parallelrechner
27
2.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2 Ausführungsmodelle . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.3 Programmiermodell . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Leistungsmessung . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3 Basisentwurf
43
3.1 Objektorientierte Programmentwicklung . . . . . . . . . . . . . . 44
3.2 Datenstrukturen und Basisalgorithmen . . . . . . . . . . . . . . . 49
3.3 Gliederung der Klassen und Schnittstellen . . . . . . . . . . . . . 62
3.4 Numerisches Verfahren . . . . . . . . . . . . . . . . . . . . . . . 64
3.5 Lokale Gitterweitenanpassung . . . . . . . . . . . . . . . . . . . 70
4 Das parallele Simulationsprogramm
4.1 Ansatz zur Parallelisierung
77
. . . . . . . . . . . . . . . . . . . . . 77
4.2 Aufteilung des Gitters . . . . . . . . . . . . . . . . . . . . . . . . 80
4.3 Numerisches Verfahren . . . . . . . . . . . . . . . . . . . . . . . 82
4.4 Identifikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.5 Lokale Gitterweitenanpassung . . . . . . . . . . . . . . . . . . . 95
4.6 Dynamische Lastverteilung . . . . . . . . . . . . . . . . . . . . . 98
4
INHALTSVERZEICHNIS
5 Dokumentation zur Implementierung
109
5.1 Adaptives Gitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.2 Sicherung und Wiederherstellung . . . . . . . . . . . . . . . . . . 116
5.3 Numerisches Verfahren . . . . . . . . . . . . . . . . . . . . . . . 118
5.4 Identifikation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.5 Datenaustausch im parallelen Verfahren . . . . . . . . . . . . . . 122
5.6 Dynamische Lastverteilung . . . . . . . . . . . . . . . . . . . . . 124
5.7 Iterationspaket . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
5.8 Schnittstelle zum Message Passing System . . . . . . . . . . . . 129
5.9 Ausführbare Programme . . . . . . . . . . . . . . . . . . . . . . . 131
6 Testbeispiele, Messungen und Bewertung
135
6.1 Hinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
6.2 Dynamische Lastverteilung . . . . . . . . . . . . . . . . . . . . . 143
6.3 Beschleunigung und Skalierung . . . . . . . . . . . . . . . . . . . 150
6.4 Bewertung der Ergebnisse . . . . . . . . . . . . . . . . . . . . . 157
A Abbildungen
161
B CD-ROM Datenträger
167
C Index der Quelldateien
171
Literaturverzeichnis
172
5
Einleitung
Motivation
Die rechnergestützte Simulation physikalischer Vorgänge der Kontinuumsmechanik hat in den letzten Jahren zunehmend an Bedeutung gewonnen. Wohlbekannte Anwendungen sind für die Strukturmechanik die Vorhersage von Verformung und Bruch von Werkstücken z.B. im Fahrzeugbau oder in der Baustatik, für die Strömungsmechanik die Bestimmung von Druck-, Temperatur- und
Geschwindigkeitsprofilen beispielsweise in der Meteorologie, im Flugzeugbau
und bei der Auslegung von Wärmekraftmaschinen. Die Gründe dafür lassen
sich mit der Feststellung zusammenfassen, daß die Simulation, falls sie mit
den derzeitigen Möglichkeiten durchführbar und unter dem Gesichtspunkt der
jeweils vorgenommenen Vereinfachungen noch aussagekräftig genug ist, eine kostengünstige Alternative zu experimentell gewonnenen Vorhersagen darstellt.
Bei genauer Betrachtung erweisen sich die beiden Rahmenbedingungen als
miteinander gekoppelt, denn signifikante realitätsnahe Berechnungen erfordern hohe Rechnerleistungen, gemessen in der Anzahl der auszuführenden
arithmetischen Basisoperationen und rücken daher durch die stetige Weiterentwicklung der Mikroprozessoren und Rechnersysteme immer mehr in greifbare Nähe.
Daneben haben aber auch entscheidende Verbesserungen in den zugrunde
liegenden mathematischen Methoden und in den zugehörigen Algorithmen
dafür gesorgt, die vorhandenen Möglichkeiten zielgerichtet und effizient einzusetzen.
Ziele und Rahmen
Mit der vorliegenden Arbeit sollen zwei wesentliche Methoden, die zur Beschleunigung numerischer Strömungsberechnungen auf unstrukturierten Gittern herangezogen werden können, miteinander kombiniert werden:
6
Adaptivität, hier speziell die lokale und zeitabhängige Anpassung der Gitterweite nach Maßgabe eines Verfeinerungskriteriums. Der offensichtliche Gewinn einer adaptiven Gitterstrategie liegt in der Möglichkeit, die
begrenzte Anzahl verfügbarer Freiheitsgrade dort einzusetzen, wo sie
den besten Nutzen entwickeln.
Parallelisierung, zunächst als Begriff für die Option, eine numerische Simulation auch auf einem Parallelrechner durchführen zu können, transparent gegenüber den besonderen Eigenschaften und Einschränkungen
derartiger Rechnersysteme (vgl. Kap. 2).
Ziel
Ziel ist die Entwicklung einer Simulationssoftware, die in der Lage ist, die Leistungsmöglichkeiten der heutigen Parallelrechnergeneration für eine gegebene
Klasse von Aufgabenstellungen der mathematischen Strömungssimulation zu
erschließen.
Es wird sich herausstellen, daß als Grundlage dafür eine Strategie zur verteilten Datenhaltung benötigt wird, damit die Freiheitsgrade des numerischen
Verfahrens mit dem darunterliegenden Gitter aufgeteilt und völlig getrennt sowohl verwaltet als auch bearbeitet werden können. Für Teilaufgaben, die Datenzugriffe über die Grenzen dieser Aufteilung hinweg erfordern, werden die
betreffenden Daten auf geeignete Art identifiziert und herangeführt.
Darüber hinaus muß auch vorgesehen werden, die Aufteilung der Freiheitsgrade zur Laufzeit verändern zu können, weil die lokale Gitterweitenanpassung
(Adaptivität) Freiheitsgrade unterschiedlich stark in die Teilprobleme einfügen
oder aus ihnen entfernen wird. Dies führt auf die Frage, wie eine effiziente
dynamische Lastverteilung realisiert werden kann, über welche Eigenschaften
das verteilte Gitter dazu verfügen muß, und wie sich die vorgestellten Ideen
bereits im Entwurf der geometrischen Gitterdatenstrukturen und Basisalgorithmen so geschickt vorbereiten lassen, daß ein einheitliches Konzept entsteht.
Damit sind die im Bereich des Programmentwurfs liegenden Aspekte der Zielrichtung dieser Arbeit zunächst kurz umrissen. Auf der anderen Seite, also
dort wo nach Leistungsfähigkeit von numerischen Verfahren, Algorithmen und
Programmentwürfen gefragt wird, sollten aber auch befriedigende Antworten
gegeben werden können. Betrachtet man dazu die Simulation der zeitabhängigen kompressiblen Durchströmung einer dreidimensionalen Geometrie selbst
als als eine aktuelle, praxisrelevante Fragestellung der Strömungssimulation
oder eventuell als ein Teilverfahren in einer komplexeren Berechnung: Beidesmal sind alle für die Bewertung des parallelen adaptiven Algorithmus entscheidenden Gesichtspunkte enthalten; ebenso wird sich zeigen, daß die im letzten
Kapitel vorgestellten Testprobleme sogar schärfere Anforderungen an das entwickelte Verfahren definieren als viele Aufgabenstellungen auf der Grundlage
aufwendigerer Modelle.
7
Rahmen
Das für die Simulation einer zeitabhängigen kompressiblen Überschallströmung ausgewählte numerische Verfahren ist ein explizites Finite Volumen
Verfahren erster Ordnung auf einem unstrukturierten nichtkonformen Hexaedernetz. Die Freiheitsgrade des numerischen Verfahrens sind an die Elemente gebunden, der Aufwand des Verfahrens besteht im wesentlichen aus der
Berechnung der numerischen Flüsse auf den Element-Element-Grenzflächen.
Der Daten- bzw. Methodeninhalt des in der Programmiersprache C++ realisierten parallelen Simulationsprogramms geht über den vom verwendeten numerischen Verfahren benötigten Umfang nicht hinaus, um einen linearen und
übersichtlichen Aufbau der Implementierung zu unterstützen.
Im Gegensatz dazu berücksichtigt der Entwurf die Ausdehnung des numerischen Verfahrens auf höhere Approximationsordnung, viskose Zusatzterme
oder implizite Diskretisierungsschemata bei der Auslegung der Datenstrukturen und Basisalgorithmen. Damit ist die Gitterverwaltung des parallelen Simulationsprogramms auch eine ideale Grundlage für die Integration aufwendigerer Lösungsverfahren für realitätsnahe Problemstellungen.
Die Reichweite des entwickelten Datenmodells für die geometrischen Zusammenhänge im Gitter geht sogar noch über diese Möglichkeiten und die verwendeten Hexaederelemente hinaus: Eine Erweiterung des Programms auf
ein vergleichbares Tetraedernetz ist im Umfang des beiliegenden Quellcodes
enthalten und vermittelt bei Bedarf einen Eindruck von der Flexibilität des Entwurfs. Selbst ein weiterer Ausbau auf eine hybride Gitterstruktur mit verschiedenen Elementtypen erfordert keine tiefgreifenden Änderungen im Programmentwurf, weshalb an den entscheidenden Stellen in der Dokumentation auf
die entsprechenden (fundamentalen) Konzepte im Lösungsansatz eingegangen wird.
Umfang
Die vorliegende Arbeit enthält an erster Stelle eine umfassende Darstellung des numerischen Verfahrens zur Simulation kompressibler zeitabhängiger
Strömungen und dessen Analyse im Hinblick auf die verteilte Datenhaltung.
Daran anschließend wird ein objektorientierter Programmentwurf, der alle vorliegenden Anforderungen erfüllt, vorgestellt. Daneben wird besonderer Wert
darauf gelegt, möglichst viele Entwurfsmuster und eventuell sogar Standardentwurfsmuster zu identifizieren, um dadurch eine knappe und verständliche
Dokumentation des Entwurfs zu unterstützen.
Weiterhin soll der Bezug zur Implementierung, die in C++, einer mittlerweile
verbreiteten und verfügbaren Programmiersprache mit Unterstützung für objektorientierte Konzepte vorliegt, hergestellt werden, wodurch die sich anschlie-
8
ßende Dokumentation des Programmcodes auf jene Eigenschaften beschränkt
werden kann, die nicht bereits aus dem Entwurf hervorgehen.
Abschließend ist zu testen, wie gut das entwickelte Programm den vorab aufgestellten und formulierten Vorgaben und Erwartungen entspricht. Zu diesem
Zweck sind im letzten Kapitel Testbeispiele, Zeitmessungen und Aufwandsbetrachtungen zusammengestellt.
Der Quellcode des Simulationsprogramms gehört mit zum Umfang der Arbeit,
zunächst mindestens als ein Beleg, der die gewonnenen Ergebnisse reproduzierbar und jederzeit nachprüfbar macht.
Deshalb ist es notwendig, den Quellcode des Simulationsprogramms in exakt
der Version, die zu den dargestellten Ergebnissen geführt hat, als festen Bestandteil der Arbeit anzusehen, zumindest überblicksartig zu dokumentieren
und mit dem zugrunde liegenden Programmentwurf in Verbindung zu bringen.
Durch den Umfang der Quelldateien ist es nicht möglich, sie in Form eines
Klartextausdrucks in diesem Dokument unterzubringen. Insofern bietet sich
ein CD-ROM Datenträger, auf dem die Dateien abgelegt sind, als praktikable
Lösung an.
Inhaltliche Einordnung
Allgemein ist das bearbeitete Thema der Programmentwicklung zur Nutzung
von Höchstleistungsrechnerarchitekturen für Aufgabenstellungen der numerischen Mathematik, insbesondere der numerischen Strömungssimulation, zuzuordnen.
Die Forschung in diesem Bereich ist bemüht, Konzepte zu entwickeln, die explizit die zugrunde liegende mathematische Problemstellung berücksichtigen,
bzw. diese sogar von der algorithmischen Seite nutzen können. Hier wiederum
lassen sich zwei hauptsächliche Richtungen unterscheiden: Einerseits findet
man die Entwicklung von Verfahren, die hinsichtlich ihrer Daten stark strukturiert sind und dadurch eine äußerst effiziente Nutzung der Rechenanlagen
zulassen.
Auf der anderen Seite erkennt man die Algorithmen für unstrukturierte Problemstellungen, deren Klasse im Bereich der Lösungsverfahren für partielle Differentialgleichungen hauptsächlich die adaptiven numerischen Verfahren
auf unstrukturierten oder hybriden Gittern umfaßt. Der Vorteil dieser Verfahren liegt in ihrer Flexibilität im Hinblick auf realistische Problemstellungen [42],
wodurch auch die aufwendige Ausdehnung auf eine parallele Verarbeitungsstrategie gerechtfertigt wird.
Das im Rahmen dieser Arbeit entwickelte Simulationsprogramm profitiert hinsichtlich seines Entwurfs, also der Strukturierung und Auslegung der Daten
und Algorithmen, an einigen Stellen von den Erfahrungen aus früheren Untersuchungen und Vorschlägen zu verwandten Themen und Fragestellungen.
9
Von besonderem Interesse sind dabei sicherlich die Parallelisierung eines rekursiven Verfeinerungsalgorithmus auf Dreiecksgittern für Transputer [22], die
Betrachtungen zu einem adaptiven Mehrgitterverfahren mit dynamischem Lastausgleich [5] für stationäre Probleme in Verbindung mit dem dazu entworfenen
abstrakten verteilten Datenmodell [6] sowie die Untersuchungen zur Effizienz
paralleler Simulationsverfahren für die kompressiblen Navier-Stokes Gleichungen auf unstrukturierten Dreicksnetzen mit verschiedenen Methoden zur Gitterzerlegung [36].
Ergebnisse
Die vorliegenden Ergebnisse sind keinesfalls als ein Vorschlag für die Zusammenführung von bereits bestehenden Techniken und Konzepten aus anderen
Untersuchungen zu einem Endprodukt mit hoher Integrationsdichte anzusehen, denn das Gesamtverfahren eines parallelen adaptiven numerischen Algorithmus mit dynamischer Lastverteilung ist aufwendig, kondensiert aber letztlich die Anforderungen aus realistischen Aufgabenstellungen an einen verteilten Datenentwurf sogar noch massiv.
Es stellt damit den nicht weiter reduzierbaren Kern einer verteilt-parallelen
Verarbeitungsstrategie dar, denn ein adaptives paralleles Verfahren kann, wie
auch abschließend nachgewiesen wird, ohne dynamische Lastverteilung nicht
effizient auf zeitabhängige Probleme angewandt werden. Entlang des reduzierten Problems zeigt die vorliegende Arbeit erstmals verschiedene neue Ansätze
für den Programmentwurf auf:
Eine geradlinige und durchgängige Analyse und Modellierung unter dem
Paradigma der Objektorientierung führt auf einen strukturierten und
durchsichtigen Programmentwurf mit klaren und einsichtigen Klassendefinitionen (vgl. Kap. 3.3).
Neu identifizierte Entwurfsmuster und die sinnvolle Übernahme von
Standardentwurfsmustern [12] eröffnen eine gegenüber traditionellen
Ansätzen abweichende Sicht auf das mathematische Verfahren und die
geometrischen Zusammenhänge des Gitters (vgl. Kap. 3.2, 3.4).
Bereits in der Klassenhierarchie des Basisentwurfs ist die Option zu einer
Ausdehnung des numerischen Verfahrens auf eine höhere Approximationsordnung [42] oder auf Discontinous-Galerkin Verfahren [8] enthalten.
Geeignete Abstraktionen in der Schnittstellenauslegung ermöglichen es,
das Programm auf anisotrope Verfeinerungsregeln [3] oder Tetraederelemente und hybride Gitter erweitern zu können (vgl. Anh. B).
Geschickt entworfene Algorithmen für die parallele Gitterweitenanpassung und die Identifikation vermeiden Datenüberhang und Redundanz
10
im verteilten Simulationsprogramm und schaffen die Grundlage für ein
Gesamtverfahren, das auch für stark instationäre Probleme effizient eingesetzt werden kann (vgl. Kap. 4.4, 4.5).
Weiterhin liegen mit den Messungen am Simulationsprogramm für die konkrete realistische Problemstellung Einsichten vor, die dazu führen sollten, daß
manche Vorbehalte gegenüber objektorientierten Ansätzen in der Programmentwicklung für mathematisch-ingenieurswissenschaftliche Anwendungen neu
bewertet werden:
Die Messungen zur dynamischen Lastverteilung zeigen, daß der zusätzliche Aufwand zur Partitionierung und Umverteilung des Gitters auch für
stark instationäre Strömungen mit wechselnder Topologie der Verfeinerungszone nur ca. ein Prozent des gesamten Berechnungsaufwands ausmacht (vgl. Kap. 6.2).
Der Vergleich des adaptiven parallelen Gesamtverfahrens mit Rechnungen auf einem global verfeinerten Gitter ergeben eine mehr als halbierte
Ausführungszeit der Simulation durch die lokale Gitterweitenanpassung
mit dynamischer Lastverteilung (vgl. Kap. 6.3.1).
Die Untersuchungen zur Skalierbarkeit des Simulationsprogramms zeigen, daß das parallele Simulationsprogramm gerade für hochaufgelöste
Berechnungen mit mehreren Millionen Freiheitsgraden sehr geeignet ist
(vgl. Kap. 6.3.4).
Die umfangreichsten Testrechnungen auf 120 Prozessoren führen eindrucksvoll vor, wie die verteilte Gitterverwaltung mit einem Gitter aus
ca. 20 Millionen einzelnen Objekten effizient umgeht und weisen damit
die Eignung des objektorientierten Entwurfs, der vorgeschlagenen Datenstrukturen und der verwendeten Programmiersprache für realistische
Problemgrößen nach (vgl. Kap. 6.3.3).
Somit darf an dieser Stelle schon vorweggenommen werden, daß mit dem vorliegenden Entwurf das Problem einer verteilt-parallelen Ausführung der numerischen Simulation nicht nur strukturell unter vielen Aspekten bearbeitet worden
ist, sondern daß die aufgezeigten Ansätze auch zu einer effizienten Implementierung weiterentwickelt werden können.
Danksagungen
Ohne die Unterstützung der nachfolgend aufgeführten Personen oder Einrichtungen wären die Ziele dieser Arbeit nicht oder zumindest nicht im erwarteten
Umfang erreicht worden. Ich danke daher
11
dem Betreuer Herrn Prof. Kröner für die Vergabe des Themas und den
Vorschlag, das Vorhaben aufgrund seiner fachübergreifenden Definition dem Graduiertenkolleg Nichtlineare Differentialgleichungen: Modellierung, Theorie, Numerik und Visualisierung zuzuordnen,
dem Zweitgutachter Herrn Prof. Burkhardt von der Fakultät für Informatik
an der Universität Freiburg,
der Deutschen Forschungsgemeinschaft (DFG) für die finanzielle Unterstützung des Promotionsvorhabens durch ein dreijähriges Stipendium
im Rahmen des Graduiertenkollegs Nichtlineare Differentialgleichungen:
Modellierung, Theorie, Numerik und Visualisierung,
den Betreibern der Parallelrechner am Rechenzentrum der Universität
Karlsruhe, am Institut für Wissenschaftliches Rechnen (IWR) in Heidelberg und am Paderborn Center for Parallel Computing (PCPC) in Paderborn für den zuverlässigen, berechenbaren und forschungsorientierten
Betrieb der jeweiligen Hochleistungsrechner,
verschiedenen, im Text erwähnten wissenschaftlichen Einrichtungen
bzw. Forschergruppen für die unkomplizierte und transparente Art, wie
die dort entwickelte Software zur Einsicht und Verwendung zugänglich
gemacht wird,
und nicht zuletzt den Kollegen Andreas Dedner und Matthias Wesenberg
für die Diskussionen und Anregungen zum vorliegenden Dokument, dem
Kollegen Ralph Schwörer für die Unterstützung bei der Visualisierung der
Ergebnisse, Herrn Ulrich Hiddemann für verschiedene Hinweise zur Verwendung der Unified Modeling Language [7] in der Dokumentation und
meiner Schwester Sibylle Schupp für die Unterstützung bei der Drucklegung des Dokuments.
12
13
Kapitel 1
Simulation kompressibler
reibungsfreier Strömungen
in 3D
1.1 Die Euler-Gleichungen der Gasdynamik
Die Euler-Gleichungen der Gasdynamik sind ein mathematisches Modell für
das zeitliche Verhalten kompressibler reibungsfreier Strömungen. Unter bestimmten Annahmen kann beispielsweise die Strömung trockener Luft mit diesen Gleichungen beschrieben werden. Aber auch für ausgefeiltere Modelle,
die weitere Effekte wie Reibung, Strahlung oder chemische Reaktion enthalten, sind die Euler-Gleichungen und die zugehörigen numerischen Verfahren
fundamentale Bausteine.
Die Euler-Gleichungen sind ein System von Erhaltungsgleichungen, das aus
der Annahme folgt, es gebe eine (vektorielle) physikalische Größe, deren zeitliche Entwicklung innerhalb eines beliebigen Volumens sich durch Bilanzen auf
dessen Rand ausdrücken läßt. Dieser Zusammenhang soll zunächst kurz skizziert werden, unter anderem auch deshalb, weil das verwendete Finite Volumen Verfahren aus nahezu identischen Überlegungen heraus motiviert werden
kann.
Notation und verwendete Bezeichnungen
In den weiteren Abschnitten dieses Kapitels werden die folgenden Notationen
und Bezeichnungen verwendet:
Der Ortsvektor bezüglich eines raumfesten Koordinatensystems.
Vektoren sind durch fettgedruckte Buchstaben bezeichnet.
14
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
Die euklidische Norm auf dem normierten Vektorraum (NVR)
8 #9 ;: 8 #9 !#" !%$&'& )( für T
* +'-,/,.0d.h.
213,/4513,/67 .
Der Divergenzoperator in
ist
.
mit
Die linearen Abbildungen bzw. die Gruppe der invertierbaren lieines NVR .
nearen Abbildungen
<=9?>@9
Weiterhin sei A ein Gebiet, und BDC*A
kompaktes Testvolumen innerhalb von A .
9
ein hinreichend glatt berandetes
Bilanzengleichungen
EF'GEH JI )K 'LKM N I OPRQSTE5U
,0VWO
Die in einer Bilanzengleichung auftretenden Größen sind eine räumliche Dichund die entsprechende Stromdichte
. Weiteverteilung
terhin wird angenommen, daß für die Gesamtmasse
in einem
beliebigen, festgehaltenen Testvolumen sich die zeitliche Änderung
alleinig aus der Situation auf dessen Berandung, genauer aus der Bilanz der einund ausströmenden Massen ergibt:
X
S , V EY[Z
X]\
KS _ ^` MU a (1.1)
K ^`b /U a b
Hier steht auf der rechten Seite das Oberflächenintegral über die durch ein
Flächenelement
ausströmende Masse
mit der äußeren Einheitsnormalen . Werden die Stromdichte und der Rand des Testvolumens als
hinreichend glatt vorausgesetzt, darf der allgemeine Hauptsatz angewendet
werden, und es folgt die lokale bzw. differentielle Form (Erhaltungsform) der
Bilanzengleichung (1.1):
(1.2)
^`
U/a
K
dK fe ,MVEc1 ?
Letztlich ist es vom verwendeten Modell abhängig, in welcher Beziehung Dichte und Stromdichte zueinander stehen. Für die Bewegung einer räumlichen
Massenverteilung setzt man
, wobei
das Geschwindigkeitsprofil des skalaren Transports ist [23].
KghE/i
ijhik JI Die Euler-Gleichungen der Gasdynamik folgen unter der Voraussetzung, daß
Masse, linearer Impuls und die Energie bestimmten, physikalisch begründeten
Bilanzengleichungen genügen, wenn die beschriebene Vorgehensweise sinngemäß auf den Vektor dieser Größen angewendet wird.
Erhaltungsgleichung für die Massendichte
El'LEm NI Die Dichte
und die Massenstromdichte
genügen einer Erhaltungsgleichung der Form:
E/i Le , V En1 o
EMi
des betrachteten Gases
(1.3)
1.1. DIE EULER-GLEICHUNGEN DER GASDYNAMIK
15
Erhaltungsgleichungen für die Impulsdichte
EMi
Die drei Komponenten der Dichte des linearen Impulses
erfüllen zusammen mit der Impulsstromdichte homogene Bilanzengleichungen, solange eine
Impulsänderung durch Volumenkräfte wie Gravitation oder elektromagnetische
Kräfte ausgeschlossen wird. Die Impulsgleichungen in Komponentenschreibweise lauten:
+1 u 13,/4]EMqrpqm 1s,/6/EMqvq e
(1.4)
(1.5)
q 13, 4 EMq 1)u 1s, 6 EMq q e (1.6)
q 13, 4 EMq q 13, 6 #E0q 1+u e
Die Impulsgleichungen (1.4)-(1.6) können mit dem zu i dualen Vektor i w auf
,MVpEMqr s
1 ,/.tEMq
, V EMq s
1 , . EMq
, V EMq s
1 , . EMq
die kürzere tensorielle Schreibweise reduziert werden:
,0VHE/i 1 ? #E5iyx=i{z 1F|tu -e (1.7)
Hinweis: Der Ausdruck E5i+xoi w wird als in der Kontinuumsmechanik als Impulsstromdichtetensor, der Term für den Druck |tu als Spannungstensor be-
zeichnet. Aus der Symmetrie des Spannungstensors folgt die Erhaltung des
Drehimpulses bzw. umgekehrt die Invarianz der Impulsgleichungen unter Rotation des zugrunde liegenden räumlichen Koordinatensystems.
}
Erhaltungsgleichung für die Energiedichte
~~/ NI Die Energiedichte
genügt ebenfalls einer skalaren Erhaltungsgleinoch ein Quellterm auftritt,
chung, wobei zusätzlich zur Energiestromdichte
der vom Druck abhängt. Dieser beschreibt die durch das einströmende Volumen am Testvolumen aufgebrachte Volumenarbeit:
~
i
J u1s~ i fe ,MV~k1 ?
(1.8)
Zustandsgleichung für ideale Gase
Das System der Gleichungen (1.3),(1.7) und (1.8) wird erst durch die thermodynamische Zustandsgleichung des Gases geschlossen [16]. Im vorliegenden
Fall, also für ein ideales Gas, gilt dann mit der spezifischen Gaskonstanten
und der (absoluten) Temperatur :
uy d E <
<
und
uyo
Z 5 ~Z E i r Die Konstante ist von der Temperatur unabhängig und hat für trockene Luft
einen Wert von
. Die lokale Schallgeschwindigkeit ergibt sich
daraus zu
.
=3
J
o E u
16
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
Eigenschaften der Euler-Gleichungen
Konservative Variablen: Die Euler-Gleichungen können auch als System in
Erhaltungsform geschrieben werden, es lassen sich also eine verallgemeinerte
und ein Tensor der verallgemeinerten Stromdichvektorielle Dichte
te
mit
angeben, so daß mit diesen
Größen die Gleichungen (1.3), (1.7) und (1.8) in die folgende Form überführt
werden können:
(1.9)
Lk JI F
N I 5 NI N
r > 8 ,MV/{1 * -e Der Vektor 'EmNEMq N EMq JE0q ;~ T wird Erhaltungsvektor genannt, die Kom-
ponenten bezeichnet man als konservative Variable. Das System (1.9) stellt die
Euler-Gleichungen in konservativen Variablen dar.
Primitive Variablen: Eine weitere Darstellung der Euler-Gleichungen findet
man nach einer Transformation auf die primitiven Variablen, also auf die physikalischen Basisgrößen Massendichte , Geschwindigkeit und Druck . Das
Differentialgleichungssystem liegt dann nicht in Erhaltungsform vor. Man erhält
T:
mit
E
F?#EtJqrNqHNq u (1.9)
T
i
,0VWy1 ! ,/. £M¤Le
! $¡)¢
wobei auf die explizite Darstellung der recht komplizierten Matrizen
tet wird [23, 41].
u
(1.10)
verzich¢ !
Klassifikation: Die Euler-Gleichungen sind ein hyperbolisches System partieller Differentialgleichungen 1. Ordnung. Dies kann anhand der Darstellung in
primitiven Variablen (1.10) leicht nachvollzogen werden [16]: Für jeden Vektor
hat das charakteristische Polynom
¥ ¦ ¥ ¥ ¥ 0§;¨ LUM~7Iª© ! ¥ ! Z ¨ |
«
(1.11)
!%$ ¢
¥ ¥ ¥
fünf reelle Nullstellen ¨t¬ " ¬ $¡p&'&'& . Aus der Hyperbolizität folgt wieder-
um, daß es für die Euler-Gleichungen sogenannte charakteristische Flächen
gibt, auf denen die Information durch die Differentialgleichungen transportiert
wird. Ohne auf Details einzugehen, ist zumindest für die Euler-Gleichungen der
Gasdynamik leicht einzusehen, daß für einen sich mit der lokalen Strömungsgeschwindigkeit bewegenden Beobachter das Einflußgebiet der Daten an
seinem Ort der Rückwärtsschallkegel ist. Umgekehrt erreicht einen feststehenden Beobachter in einer Überschallströmung nur Information die aus Orten
innerhalb eines räumlichen Kegels mit Öffnung in Richtung der Anströmung
kommt.
i
Die im nächsten Abschnitt beschrieben Upwind Finite Volumen Verfahren sind
genau in diesem Sinne zu verstehen: Auch das numerische Verfahren enthält
explizit in seiner Konstruktion eine Strategie, das Einflußgebiet der Lösung zu
berücksichtigen [23].
1.2. NUMERISCHES VERFAHREN
17
1.2 Numerisches Verfahren
Dieser Abschnitt stellt das gesamte numerische Verfahren vor, und zwar gegliedert in die Motivation des verwendeten Finite Volumen Verfahrens, dessen
genaue Beschreibung und die Aspekte, die durch die adaptive Strategie, hier
speziell durch die Möglichkeit zur lokalen Anpassung der Zelldurchmesser, hinzukommen.
1.2.1 Motivation: Finite Volumen Verfahren
Aus der Divergenzform der Bilanzengleichungen (1.2) läßt sich die Idee für
ein numerisches Verfahren ableiten. Dazu seien zunächst eine räumliche Aufteilung des Trägergebiets für die Lösungsfunktion in kleine Volumenelemente
(Zellen)
offen mit
und
und zellenweise konstante Approximationen für die Anfangswerte
auf allen
Kontrollvolumen gegeben.
B!#" ! $¡&'&'& ­®C[Ad
B!
¯! B°!5?A
Bt!r±)B/²YG³]µ´m¶n¹
· ¸
b S £ ITºe Bt!
Dann kann für ein beliebiges Volumen , dessen Rand keinen Teil der Gebietsberandung enthält, eine Näherungslösung
zur Zeit
folgendermaßen
berechnet werden: Gleichung (1.9) wird über das Zeitintervall
integriert
und anschließend der Hauptsatz der Integralrechnung angewandt, was auf den
folgenden Ausdruck führt:
X
!J»I »I
¼ e½;»IW¾
X3¿ V X
À S £ ,/Ák NÂ UÂ
X ¿ V X \ 7^ `
Z À S £ NÂ U/aTUÂ
X\
b S £ »°I ÄÃ b S £ #e Z b »B ! I b S £ Je 7^ ` U/a S £ 5 ;»I Z5 Je (1.12)
Mit Gleichung (1.12) liegt allerdings noch keine vernünftige Definition für eine
Näherungslösung vor, weil der Wert von auf dem Rand des Zellvolumens
ausgewertet wird, wo die Approximation der Lösungsfunktion infolge ihrer zellenweise konstanten Definition nicht eindeutig sein muß.
# Å^
Um dieses Problem zu beheben, setzt man in die Gleichung (1.12) an die Stelle
von
eine numerische Flußfunktion
ein, die neben dem Wert
auf der Zelle
auch den Wert auf der Nachbarzelle über die lokale Fläche
berücksichtigt [16, 23].
v²
Æ{!²0#!JJv² ¡!
¸
^ ^ `2b /U a b
Hinweis: Die skalierte äußere Normale
ist in der Definition der
numerischen Flußfunktion
enthalten, was durch die Indizes deutlich gemacht wird. Die Flußfunktion ist daher im Gegensatz zu eine vektorwertige
Funktion.
Æ !²
}
18
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
1.2.2 Numerische Flußfunktion
Æ{!²
kann das heuristische Schema zur
Mit einer numerischen Flußfunktion
Berechnung einer numerischen Approximation der Lösungsfunktion zum Zeitpunkt
aus den (Anfangs-) Daten zum Zeitpunkt (1.12) in eine Form
überführt werden, die explizit berücksichtigt, daß die Approximation der Daten auf Grenzflächen zwischen zwei Volumen nicht stetig sein muß. Wird das
Integral über die Volumen-Volumen-Grenzflächen durch eine 1-Punkt Integrationsformel approximiert, erhält man ein explizites Finite Volumen Verfahren in
niedrigster Ordnung [16, 23]:
I51¹»I
I
!J#Ir1Ç»I ' !NI Z b °» B! I b È Î Î Æ{!²0#!;I ;r²/I N
£ÉpÊ Ë0È ÌM£É7Í £/Ë0Ð ÑÏÌÍ É
' Ò! Z b »I b Ô Æ{!'²/# Ò! J ²Ò bzw. ¡!ÒÓ
B ! £É
(1.13)
Die Konstruktion der numerischen Flußfunktion wird anschließend für ein konkretes Verfahren motiviert, hier sollen noch die allgemeinen Bedingungen, die
an eine numerische Flußfunktion zu stellen sind, aufgezählt werden:
Æ '! ² ; Æ{!²0#5J Æ !'² ; ZsÆ !'² ÖmJÖ p×HØÙHÚ#Û Ü
´y;Öt; JÖ ßrà á und
ZÕÆ ²J! # J (1.14)
^
(1.15)
# !²
( ½Ý )ZÖ ;ÙHÚ 1 ZÞÖ JÙrÚ (1.16)
Ýlâfãå!è
äæ ç]é äã Bt! Bedingung (1.14) sichert die Erhaltungseigenschaft des Verfahrens, (1.15)
muß aus Konsistenzgründen erfüllt sein. Aus verschieden Beweisen zur Konvergenz von Finite Volumen Verfahren für skalare hyperbolische partielle Differentialgleichungen [25] wird die Voraussetzung (1.16) sinngemäß für Systeme
übernommen.
1.2.3 Flußfunktion von Steger und Warming
Das parallele Simulationsprogramm verwendet die Flußfunktion von Steger
und Warming [34], welche als numerisch robust gilt und effiziente Implementierungen zuläßt. Das Verfahren gehört zur Klasse der Flux Vector Splitting
Verfahren, die auf einer Zerlegung des Erhaltungsvektors basieren.
Eine einfache Betrachtung läßt zumindest die Absicht, die der Konstruktion des
Verfahrens zugrunde liegt, vermuten. Ein lineares System hyperbolischer Differentialgleichungen in einer Raumdimension für eine allgemeine vektorwertige
Funktion
ê +( =ë ¼ e½J<¾W 2¬ : 8 2 ¬ ¢
, V ê?1 êìLe
¢
(1.17)
1.2. NUMERISCHES VERFAHREN
í
19
kann in ungekoppelte Gleichungen für die Elementarwellen (die rechten Eigenvektoren von ) zerlegt werden, was auf ungekoppelte lineare skalare hyperbolische Differentialgleichungen führt [16]:
¢
,0Vï î !vZð!,/.fï î !¡feT2ð!f· eY2¶? í (1.18)
In diesem Fall kann leicht eingesehen werden, daß jede der Gleichungen die
)
Information mit fortschreitender Zeit entlang der x-Achse in positiver (
oder negativer (
) Richtung transportiert. Demnach sollte das numerische
Verfahren zur Bestimmung des neuen Funktionswerts an einer Stelle auf die
benachbarten Werte auf der richtigen“ Seite zugreifen.
”
Da ein Finite Volumen Verfahren in mehreren Raumdimensionen durch die Normalenrichtung
der betrachteten Element-Element-Grenzfläche bereits eine
Raumrichtung auszeichnet, kann die bisherige Überlegung nach einer Transformation des Koordinatensystems auch auf lineare skalare Gleichungen in
mehreren Raumdimensionen angewendet werden.
¤ñDe
óòfe
^`
Mit den Euler-Gleichungen liegt jedoch ein nichtlineares System vor, wodurch
noch erhebliche Unterschiede zur vorgestellten Situation begründet werden.
Betrachtet man auch hier den eindimensionalen skalaren Fall
, V ï Z, . ï eYP )( ï
w [e
ï ï ôÁJI ïw
und setzt als strikt konvex voraus, dann gibt es höchstens einen Wert von
mit
und das Schema von Enquist und Osher [9] ist eine Diskretisierung mit Upwind Charakter. Mit den Funktionen
Ó ï - ãTäæ ï w ï N ï '- ã é%õ ï w ï N
(1.19)
definiert das Schema von Enquist und Osher die numerische Flußfunktion als
ö ï N ÷ fHÓ ï 1Ç ÷ (1.20)
Die Flußfunktion (1.20) greift in Abhängigkeit des Vorzeichens von
auf das
linke oder rechte Argument zu (Upwind Eigenschaft). Eine vergleichbare Voraussetzung an darf auch für die Euler-Gleichungen gemacht werden [16].
ê )( -ë ¼ e½N<ª¾ ¬ t )( ø¬
,MVÁêùZÞ,/.c Mê T ,0VêZÞú{ ê ,M.ê 2¬ e
e
Dehnt man die Betrachtungen auf ein nichtlineares System in einer Raumdimensionen aus
(1.21)
(1.22)
wird eine zum skalaren Fall ähnliche Situation nur auftreten, falls die Eigenwerte
der Jacobimatrix
in Abhängigkeit von immer einheitlich positives oder negatives Vorzeichen haben. Die Eigenwerte für die Jacobimatrix
der Euler-Gleichungen sind hingegen
,
und
, die
Situation mit verschiedenen Vorzeichen ist also zu berücksichtigen [23].
¨ !J#ê ú{
ê
q
¨ ?ql1 ¨ ?
¨t oqZs
20
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
Hinweis: An dieser Stelle sind die Unterschiede zwischen den verschiedenen numerischen Flußfunktionen zu erkennen: Im Überschallbereich haben alle das erforderliche Upwind Verhalten, wohingegen im Unterschallbereich nach
verschiedenen Vorschriften diskretisiert wird.
}
Ó
Zu (1.19) analoge Funktionen
,
für die Euler-Gleichungen erhält man,
wenn die Homogenität erster Ordnung der Funktion
genutzt wird, die im
Fall idealer Gase gilt ( bezeichnet den Erhaltungsvektor mit einer Geschwindigkeitskomponente)
ê
Mê 0#ûrê LûcMê Daraus folgt für eine Darstellung, die einer Linearisierung und Zerlegung nach
Eigenvektoren besser zugänglich ist:
Mê ¢
#ê ê Die Flußfunktion von Steger und Warming [34] definiert eine Aufspaltung von
mit der geforderten Upwind Eigenschaft durch:
0#ê ü ê)J fý Ó ê ê?13ý ø
(1.23)
wobei die Matrizen ê und Ó ê durch Auswahl der positiven und ne¢
gativen Eigenwerte ¢ aus der Jacobimatrix
ú{ nach einer diagonalisierenden
Transformation der Variablen mit den Matrizen aus den linken und rechten Eigenvektoren von
entstehen:
úy
Ó #ê þ # ê äÿ ãåäæ ¨ !N;e ½ þ
¢ #ê þ #ê ]ç é ä ÿ ã ¨ !;;e ½ þ
ç]é %é õ
¢
# ê #ê bzw.
Die Erweiterung des Verfahrens (1.23) auf mehrere Raumdimensionen geschieht mit dem Argument, daß entlang der Normalen auf einer Volumen-Volumen-Grenzfläche nur eine Ableitungsrichtung existiert. Die Gleichung kann somit in ein räumliches Koordinatensystem transformiert werden, bezüglich dessen die Ableitungen
und
verschwinden.
,M4
ê
,/6 ê
ê ¢
Ó ê ¢
#ê Auf die expliziten Darstellungen der Matrizen
,
in 1D in
Abhängigkeit vom Vektor der Erhaltungsgrößen
sowie der entsprechenden
Matrizen
und
in 3D, die zusätzlich von der Normalenrichtung der betrachteten Fläche abhängen, wird verzichtet [23].
¢
Ó ê) ^ ê)^ ^ ¢
Steuerung der Zeitschrittweite: Wendet man die Formulierung für ein Upwind Finite Volumen Verfahren als explizite numerische Vorschrift (1.12) an,
stammen alle Größen, die in die Berechnung der numerischen Flußfunktion
eingehen, aus dem letzten bereits berechneten Zeitschritt und das numerische
Verfahren transportiert eine Information in einem Zeitschritt nur von einer Zelle
(Kontrollvolumen) zu einer ihrer Nachbarzellen.
»I
Die Zeitschrittweite
ist daher so klein zu wählen, daß die maximale Ausbreitung einer Elementarwelle (1.18) während der Zeitschrittweite
nicht größer
»I
1.2. NUMERISCHES VERFAHREN
21
B !
Ô \ b _^kb b » I b Ü
»I ãåS ä£ æ b B ! b ãåÉ äæ S £ i 1s ²
ist als der Durchmesser des Volumens . Dies ist eine anschauliche Erklärung
für die CFL-Bedingung an die Zeitschrittweite
im expliziten Verfahren [23]:
Ü
(1.24)
² bezeichnet darin eine Außenfläche des Volumens B ! und ^ die skalierte
Normale an diese Fläche. Die Werte für die Geschwindigkeit i und die Schallgeschwindigkeit sRô¡NI R#ikô¡NI J werden aus den Daten des bereits
CFL
berechneten Zeitschritts ermittelt.
1.2.4 Randbedingungen
Randbedingungen sind festzulegen, falls das Trägergebiet der Strömung nur
eine endliche Ausdehnung aufweisen soll und die Strömung deshalb in Wechselwirkung mit dessen Berandung zu betrachten ist.
Für Überschallströmungen kann man einige realistische Randbedingungen angeben, die überdies im numerischen Verfahren sehr einfach zu realisieren sind.
Die zur Bewertung des verteilt-parallelen Simulationsprogramms durchgeführte Strömungsberechnung macht von vier Randbedingungen Gebrauch [23]:
Einströmrand: Am Einströmrand dürfen alle fünf Werte des Erhaltungsvektors vorgegeben werden, solange die Strömungsgeschwindigkeit dort größer als die Schallgeschwindigkeit ist. Allgemein dürfen für ein hyperbolisches System mit Gleichungen
Größen auf dem Rand vorgeschrieben werden, wenn die Anzahl
der negativen Eigenwerte von
(1.23) ist.
O
ú{
í
O-Zlí
Ausströmrand: Hier dürfen keine Werte vorgeschrieben werden,
solange die Strömung Überschallcharakter hat. Es ist leicht nachzuvollziehen, daß eine konstante Fortsetzung der Werte auf den Zellen
vor dem Rand in das Gebiet dahinter für das Upwind Verfahren genau das gewünschte Ergebnis liefert:
Ø & Û
É
£
Æ{!²M#!JJv² {Æ !'²0¡!JJ! #! _ ^ '! ² / ^ j
e
Sliprandbedingung: (No-flux boundary condition) An der festen
Wand wird
gefordert, die Strömungsgeschwindigkeit hat
nur eine tangentiale Komponente. Falls die Werte als über den Rand
hinweg konstant fortgesetzt angesehen werden, vereinfacht sich der
numerische Fluß zu (Bezugspunkt ist das Volumen , ist das aus
der Fortsetzung entstandene virtuelle Volumen):
B! B²
Ø & Û
É
£
Æ ! ² # ! ; ² Æ '! ² ! J ! # !
^ !² [Z2u°e½
;e T Der einströmende Impuls EMi ist das Produkt aus dem lokalen Druck
u und der skalierten Flächennormalen ^ !² .
22
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
Symmetrierand: Falls die Geometrie des Berechnungsgebiets
durch Spiegelung einer Teilgeometrie an einer Fläche erhalten werden kann, besteht die Möglichkeit, die Berechnung nur auf dieser
Teilgeometrie durchzuführen und den künstlichen Rand durch die
Symmetrierandbedingung
EM!¡LE²ø ~
!Á-~ð²2 v!H1Fm² ^ ` -e
^` die Normale an die Symmetriefläche bezeichdarzustellen, worin
net.
1.2.5 Adaptives Verfahren
In einem adaptiven numerischen Verfahren sollen zur Beeinflussung des Diskretisierungsfehlers während der Berechnung nach Maßgabe eines entsprechend entworfenen Kriteriums Freiheitsgrade in das Gitter eingefügt bzw. aus
ihm entfernt werden. Das kann grundsätzlich auf zwei verschiedene Arten geschehen:
h
h-Verfeinerung Die Anzahl der Kontrollvolumen wird verändert, indem bestimmte Kontrollvolumen geteilt bzw. zusammengefaßt werden. Diese Art wird auch h-Verfeinerung genannt, weil sie die Gitterweite verändert, die üblicherweise mit bezeichnet ist.
Ý
p
p-Verfeinerung Für ausgewählte Kontrollvolumen wird die Approximationsordnung der numerischen Lösungsfunktion erhöht bzw. erniedrigt. Diese Technik kann als p-Verfeinerung bezeichnet werden,
falls die numerische Lösung durch Polynome vom Grad dargestellt
wird. Die Gitterweite wird nicht verändert.
u
Die erste Art der Verfeinerung ist vom numerischen Verfahren unabhängig und
betrifft nur das Gitter. Im Fall der p-Verfeinerung hingegen muß das numerische
Verfahren dafür ausgelegt sein, mit den unterschiedlichen Approximationsordnungen umzugehen. Deshalb kann für das Finite Volumen Verfahren bei festgelegter Approximationsordnung nur eine h-Verfeinerungstechnik angewendet
werden.
Alle weiteren Überlegungen dieses Abschnitts gehen davon aus, daß ein Algorithmus vorliegt, der ein beliebiges Volumen im Gitter auf Anforderung in
kleinere Einheiten aufteilt und dabei eine Nebenbedingung der Form
Ü b ÝB ! b Ü ( Ý ' ã !ù
(1.25)
é%õ ç]é äã B! mit festgelegten Konstanten , ( einhält bzw. umgekehrt kleine Volumen zu
einem größeren unter Beachtung dieser Bedingung zusammenfaßt. Diese Nebenbedingung an die Verfeinerungsregel ist eine Voraussetzung zum Theorem
von Lax Wendroff für Systeme von Erhaltungsgleichungen [23].
1.2. NUMERISCHES VERFAHREN
23
Verfeinerungskriterium
Für skalare Gleichungen ist bereits eine theoretisch fundierte Technik zur aposteriori Schätzung des räumlichen und zeitlichen Diskretisierungsfehlers vorgestellt worden [24]. Die Ergebnisse lassen sich allerdings nicht ohne weiteres
auf die nichtlinearen Euler-Gleichungen in mehreren Raumdimensionen erweitern, sodaß man dort noch auf heuristische Kriterien zur Steuerung der Gitterweitenanpassung angewiesen ist.
Zur Untersuchung der Leistungsfähigkeit des parallelen Simulationsprogramms wird ein Testproblem benötigt, für das eine flächenartige Verfeinerungszone entsteht, die sich zeitlich in ihrer Größe, Topologie und Lage
ändert. Weil diese Anforderung nur qualitativer Natur ist, kann auch ein einfaches Verfeinerungskriterium schon brauchbare Ergebnisse liefern: In den
Testrechnungen zu einer Überschallströmung in einem einfachen Windkanal
(vgl. Kap. 6.1.2) sollen lediglich die Stoßwellen der Dichte (Schocks) vom Verfeinerungskriterium erkannt und bewertet werden. Dazu genügt es, auf allen
Volumen-Volumen-Grenzflächen
den Wert von
!'²
!²c b E Î £ ZÞE Î É b
(1.26)
zu bestimmen und daraus ein einfaches Kriterium zur Steuerung der Gitterweitenanpassung zu konstruieren, das auf eine räumliche Gleichverteilung der
lokalen Größen abzielt [22]:
!'²
! ²cCg,rB! !²nò w
´rB ¬ " ¬ $¡p&'&'& ´ ¬ ²óC,HB ¬ ¬ ²óñg
B!
verfeinere
vergröbere alle
B ¬ " ¬ $¡p&'&'& (1.27)
Das Kriterium ist dabei in folgendem Sinne zu verstehen: Das Gitter muß am
Ort der Zellen
und
verfeinert werden, sobald der Wert von auf
der gemeinsamen Fläche ist. Umgekehrt darf vergröbert werden, falls für alle
Zellen , die zu einer gröberen zusammenzufassen sind, der Wert von auf allen Außenflächen
ist.
B!
B¬
B]²
!'² Cg,rB ¬
!'²ò
!² ñg
Zusätzlich wird eine maximale Verfeinerungstiefe vorgegeben, die vorschreibt,
wie oft der Durchmesser eines Kontrollvolumens höchstens halbiert werden
darf. Diese Beschränkung ist unbedingt nötigt, weil das Verfeinerungskriterium
(1.27) kein Sättigungsverhalten zeigt, falls eine unstetige Funktion approximiert
wird. Die Vergröberung endet auf dem Niveau der Grobgitterzellen.
Hinweis: Das vorgeschlagene Kriterium zur Steuerung der Verfeinerung liefert allerdings nur dann brauchbare Ergebnisse, wenn die Konstanten , in
einer dem Problem angepaßten Form festgelegt werden. Aufwendigere Strategien beruhen beispielsweise auf der Bewertung des diskreten Gradienten der
numerischen Lösung [24, 42].
24
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
Interpolation - Restriktion
Weil die Freiheitsgrade des numerischen Verfahrens die konservativen Variablen auf den Zellen des Gitters sind, ist unmittelbar klar, wie nach der Teilung
infolge lokaler Gitterweitenanpassung die Interpolation der
eines Volumens
Daten auf die entstehenden Volumen
auszusehen hat:
B!
Bt!É
Î £ É - Î £ ´]¸°* % óBt!¡¯Á² B°!ÉÞ;Bt!%É2±Bt!ó-³¸· í
(1.28)
Alle Werte auf den Teilvolumen werden auf den konstanten Wert der Ausgangszelle gesetzt. Dies ist vernünftig, weil die Ausgangszelle keine bessere Approximation der Lösung liefert, als sie durch die identischen Werte auf den feinen
Zellen nach der Verfeinerung vorliegt.
B !É
Umgekehrt faßt die Vergröberung des Gitters einige ausgewählte Zellen
zu
einer größeren Zelle
zusammen. Aufgrund der Erhaltungseigenschaft (1.9)
müssen die in diesem Volumen vor und nach der Vergröberung die enthaltene
Masse, Energie und der Impuls unverändert bleiben:
Bt!
Î £ b tB ! b Î £ É b Bt!É b ²
(1.29)
1.3 Gesamtalgorithmus
Der nachfolgend in wenigen übersichtlichen Schritten formulierte Algorithmus
zum numerischen Verfahren zeigt, wie durch eine wiederholte Ausführung der
Zeitschrittschleife das Gitter mit seinen assoziierten Daten für die diskrete Darstellung der Erhaltungsgrößen von einem Anfangszustand zur diskreten Zeit
mit einer Verfeinerungssituation und den elementweise gespeicherten
in einen Endzustand zur diskreten Zeit
mit VerfeineErhaltungsgrößen
rungssituation und Daten
überführt wird.
IÒ
ÒÓ
¬ Ò!
!ÒÓ ¬
Ò
I ÒÓ ¬
Insofern kann schon auf dem Niveau des gesamten Gitters mit seinen Daten für die aktuelle diskrete Zeit und den elementweise definierten Werten der
numerischen Approximation gewissermaßen eine objektorientierte Sicht eingenommen werden.
Das Gitter selbst tritt darüber hinaus als Behälter (für Elemente und Flächen) in
Erscheinung und sorgt dafür, daß bestimmte Aufgaben nacheinander auf allen
Elementen
bzw. Flächen
ausgeführt werden (Iteration, vgl. Kap. 3.2.1,
5.7).
B!
!'²
Im Kapitel zum Basisentwurf des Gitters wird detailliert darauf eingegangen,
wie die Daten und die zugehörigen Funktionen derart hierarchisch gegliedert
werden können, daß jede Aufgabe bereits dort bearbeitet wird, wo die dazu
benötigten Informationen zur Verfügung stehen und dadurch viele schwach
1.3. GESAMTALGORITHMUS
25
gekoppelte Einheiten entstehen, damit das Gesamtproblem einer Parallelverarbeitung zugänglich gemacht werden kann (vgl. Kap. 2).
Algorithmus 1.1:
Start
t end < t start + ∆t
Anfangszustand: Die numerische Approximation !"# der
Lösungsfunktion besteht für das Intervall
true
$
Stop
"&% ')( *+",% '-*+.0/123/340*+"6578% '9*:"<;>=?*:"A@CB
Die Zeitschrittweite =?* " ist nach der CFL-Bedingung
$
"
(1.24) aus den Daten ! "# zu bestimmen. Falls *+D
"FEHG
bricht der Algorithmus hier ab.
I
È £É Ê
M
£ L É LK JÍ
J KHL M L ON
Verfeinerungskriterium: Auf allen Flächen P # Q des Gitters ist das Verfeinerungskriterium R # Q (1.26) auszuwerten, gegebenenfalls sind die anliegenden Elemente zu
verfeinern bzw. es darf vergröbert werden:
➞
È £É¡Ê
S £/Ë £ m£É p£ É
Sm
É Ë É m£É p£ É
I
S ATVU XWZY :[Y \
S N U XZW Y :[ Y \
Numerische Flüsse: Auf allen Flächen P # Q des Gitters
wird die numerische Flußfunktion ausgewertet. Dazu
wird auf Daten aus den anliegenden Elementen zugegriffen (lesend). Der berechnete Wert wird auf den anliegenden Elementen gespeichert (schreibend):
➞
I
Î £tÊ
£ Ë £ Σ £
£/Ë Ë p£
Y] T_^ `Y ] b
N L adc L S
S `eX[
WZY 0\
adc adc
Änderung des Verfeinerungszustands.
Versteckte (innere) Zustandsänderung.
Aufdatieren der Lösungsfunktion: Auf allen Elementen
des Gitters wird der im vorigen Schritt berechnete Wert
f # herangezogen, um den neuen Wert der numerischen
Approximation (1.13) der Lösung zu bilden. Die neue
diskrete Zeit wird zu * "657 '-* " ;g=h* " festgelegt.
➞
Änderung der numerischen Lösungsfunktion.
Zeitschrittschleife: Der Zustand des Gitters und der Daten wird zum Anfangszustand für die Berechnung des
nächsten Zeitschritts, die Abarbeitung wird an der Stelle des ersten Abschnitts fortgesetzt.
Endzustand
Stop
➞
Anfangszustand
Endzustand: Der Algorithmus bricht ab, sobald die verlangte numerische Approximation der Lösung auf einem angepaßten Gitter für einen Zeitpunkt
*:D
berechnet ist.
"E?G
( * "Ai7 4:* " @
26
KAPITEL 1. SIMULATION KOMPRESSIBLER STRÖMUNGEN
27
Kapitel 2
Parallelrechner
Zunächst sollte es ausreichen, einen Parallelrechner anzusehen, als bestehend aus einer Menge von Prozessoren, die in der Lage sind, ein Programm
für eine Anwendung kooperativ zu bearbeiten.
Dahinter verbirgt sich die Absicht, durch den zeitgleichen parallelen Einsatz
von mehreren aktiven Bauelementen (Prozessoren) entscheidende zeitliche
Gewinne zu erzielen. Allerdings darf man die Beschreibung eines Parallelrechners im ersten Absatz nicht dahingehend abändern, daß in der Formulierung
ein Programm durch jedes Programm ersetzt wird (sonst wäre die Situation
aus der Sicht der Anwendungsentwicklung auch ohne besonderen Reiz).
Es gibt also Einschränkungen für die Klasse der zulässigen Programme und
die Aufgabe der Programmentwicklung besteht grob gesprochen darin, zu einem festgelegten Problem ein geeignetes Programm“ zu konstruieren.
”
Ist bei den seriellen Algorithmen die Entwicklung noch eher schwach von der
Technologie getrieben, weil sowohl der Rechner als auch der auf ihm ausgeführte Algorithmus als eine kausale Abfolge dem intuitiven Verständnis sehr
gut zugänglich sind, sieht die Situation bei der Programmierung und Algorithmenentwicklung für Parallelrechner völlig anders aus: Hier dominiert die zur
Verfügung stehende Technik das Geschehen sowohl in der Theorie wie bei
den Ausführungsmodellen als auch bei Programmiersprachen, Programmiermodellen und Standards für die Praxis.
Deshalb sollte der Zugang nicht zu abstrakt formuliert werden, schließlich kann
kein Programmentwurf die teilweise starken Einschränkungen, die der reale Einsatz eines entsprechenden Simulationsprogramms bereit hält, einfach
ignorieren. Realer Einsatz erzwingt eben auch Entscheidungen zugunsten der
Effizienz, also zugunsten eines an den Ressourcen orientierten Programmentwurfs. Andererseits sollte klar sein, daß gerade die Möglichkeit zur Parallelverarbeitung die Programmausführung großzügig mit Prozessorleistung und
Hauptspeicherkapazität ausstattet, wovon, wann immer der Algorithmenentwurf davon profitiert, Gebrauch gemacht werden sollte.
28
KAPITEL 2. PARALLELRECHNER
2.1 Einsatz von Parallelrechnern
2.1.1 Parallelrechnersysteme
Ein kurzer Blick auf die zur Zeit verfügbaren Parallelrechnersysteme und deren
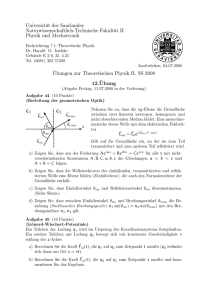
entscheidende Merkmale kann hilfreich sein zu verstehen, mit welchen Anforderungen und Rahmenbedingungen die Programmentwicklung für Parallelrechner umgehen muß. Die Taxonomie der gebräuchlichen Parallelrechnerarchitekturen (vgl. Abb. 2.1) gliedert die verschiedenen Systeme in Multicomputer
und Multiprozessoren [37].
Das übergeordnete Merkmal ist hier der für eine Anwendung sichtbare Adreßbereich: Multiprozessoren besitzen einen homogenen globalen Adreßbereich,
Multicomputer hingegen sind nicht in der Lage, Daten die verschiedenen Prozessoreinheiten zugeordnet sind, über diese Grenzen hinweg zu identifizieren. Dies entsprach den technischen Möglichkeiten zu Anfang der Entwicklung: Einerseits konnte man anstelle von nur einem auch mehrere Prozessoren
an einen Hauptspeicher anschließen, andererseits war es in Computernetzen
üblich, daß nur Daten in einheitlichem Format zwischen den beteiligten Rechnern ausgetauscht werden konnten.
Erst an zweiter Stelle erfolgt eine Klassifikation nach der Verbindungskomponente, die exklusiv wie ein Bus, oder verteilt, wie ein Netz beschaffen sein kann.
Mittlerweile verwenden viele Hersteller auch Kombinationen. Busartige Systeme sind oftmals günstig, falls wenige Prozessoren in einem verteilten Rechnersystem zusammenhängen sollen, weil dann leistungsfähige Technologien
eingesetzt werden können.
Parallele und
verteilte Computer
Multiprozessoren
(gemeinsamer
Adressbereich)
Multicomputer
(privater Speicher)
Bus
Verbindungsorientiert
Bus
Verbindungsorientie rt
CRAY T90
SGI Origin 2000,
HP Convex Exemplar
Cluster aus
Arbeitsplatzrechner n
in einem LAN
IBM SP , CRAY T3E,
Parsytec CC
Abbildung 2.1: Einfache Taxonomie der Parallelrechnersysteme [37].
2.1. MOTIVATION
29
Möchte man hingegen sehr viele (im Moment mehr als 20) Prozessoren betreiben, wird man netzartige Verbindungen bevorzugen. Verbindungsnetze sind
weniger leistungsfähig, können aber größere räumliche Entfernungen überbrücken und lassen grundsätzlich eine skalierbare Architektur zu.
Definition: Eine Parallelrechnerarchitektur, also das Schema der Verbindungen zwischen den einzelnen Prozessoren, wird skalierbar genannt, falls für
zwei beliebige Prozessoren des Parallelrechners die Zeit, die für den Austausch eines Datums erforderlich ist, weder von der Anzahl der Prozessoren
im Parallelrechner, noch von einem gleichzeitigen Datenaustausch zwischen
anderen Prozessoren abhängt.
Hinweis: Das verteilte Simulationsprogramm (vgl. Kap. 4) basiert auf dem
Message Passing Programmiermodell (vgl. Kap. 2.3.1) und ist damit in erster
Linie für verbindungsorientierte Multicomputer wie z.B. die IBM RS 6000 SP
(rechts unten in der Abbildung) ausgelegt.
}
2.1.2 Motivation
Eine parallele Verarbeitungsstrategie wird für ein bestimmtes numerisches Verfahren in erster Linie entwickelt, um die hohe Rechenleistung der Parallelrechnersysteme nutzen zu können. Eine differenziertere Aufstellung nach drei Zielrichtungen sieht so aus:
1. Für eine festgelegte Problemgröße soll möglichst schnell ein Ergebnis der Berechnung vorliegen, um z.B. effizient Parameterstudien
durchführen zu können: Die Programmausführung wird durch die Parallelverarbeitung beschleunigt.
2. Die Aufgabenstellung soll um einen bestimmten Faktor vergrößert werden, ohne die Laufzeit nachhaltig zu verlängern: Die Problemgröße und
die Leistung des verwendeten Rechnersystem werden gleichmäßig, also
skaliert erhöht.
3. Die gewünschte Problemgröße benötigt Ressourcen, die von Einprozessorsystemen aus konstruktiven Gründen nicht bereitgestellt werden
können. Beispielsweise ist der von einen Prozeß adressierbare Hauptspeicher durch die Länge der verwendeten Adressen begrenzt: Manche
durch die Technologie vorgegebenen Grenzen von Einprozessorsystemen wenden sich auf Parallelrechner nicht an.
Die ersten zwei Zielvorgaben für ein Parallelisierungsvorhaben, nämlich Beschleunigung und Skalierbarkeit werden im Abschnitt über die Leistungsmessung für parallele Verfahren zu strikten Meßvorschriften ausgebaut, anhand
derer die Qualität eines parallelen Programms gemessen werden kann.
30
KAPITEL 2. PARALLELRECHNER
2.1.3 Parallelverarbeitungsstrategie
Definition: Unter Parallelisierung eines Algorithmus soll hier seine Implementierung mit dem Ziel einer effizienten Parallelverarbeitung verstanden werden.
Diese Definition ist so gestaltet, daß der zur Lösung eines bestimmten Problems ausgewählte Algorithmus durch die Parallelisierung nicht verändert werden soll, die Anpassungen für eine parallele Verarbeitung beziehen sich alleine
auf den Programmentwurf bzw. dessen Umsetzung (Implementierung).
Dadurch lassen sich die Ziele aus dem vorangegangenen Abschnitt von der
Frage nach dem optimalen numerischen Verfahren, das dem Algorithmus zugrunde liegt, trennen. Der vorgeschlagene Ansatz geht also vereinfachend davon aus, daß an erster Stelle das günstigste numerische Verfahren für eine bestimmte Problemstellung auszuwählen ist, und dann erst eine Strukturierung
für die Parallelverarbeitung vorgenommen wird.
Jede Strategie zur Parallelisierung wird sich bemühen, im vorliegenden Algorithmus möglichst viele voneinander unabhängige Einheiten zu identifizieren,
die den Ausgangspunkt für die Parallelverarbeitung bilden.
Diese Einheiten können sowohl im Bereich der Instruktionen des Programms
gefunden werden (Programmparallelität) oder als an Daten gebundene Operationen, was einem objektorientierten Ansatz, der Operationen mit Daten verbindet, entgegenkommt (vgl. Kap. 3.1). Im zweiten Fall spricht man von einem
datenparallelen Ansatz [15]:
Definition: Datenparallelität liegt vor, wenn auf jedes Element einer Menge
von Daten jeweils die selbe Operation unabhängig angewendet werden muß.
Läßt sich eine solche Datenmenge angeben, ist die Verteilung des Aufwands
der Operationen implizit durch die Verteilung der Daten realisierbar.
Im datenparallelen Ansatz besteht die Aufgabe darin, jene unabhängigen Operationen zu finden, die gleichmäßig auf den gesamten Datensatz angewendet
werden sollen. In der Praxis darf man allerdings nicht erwarten, daß z.B. das
gesamte numerische Verfahren eine solche Eigenschaft aufweist, vielmehr besteht die Unabhängigkeit in der Regel nur für kleine Teilalgorithmen des Gesamtverfahrens.
Konkret bedeutet dies, daß nach jeder unabhängigen parallelen Abarbeitung
eines Teilalgorithmus die Abhängigkeiten, die durch das Gesamtverfahren zwischen den Daten vorgegeben sind, restauriert werden müssen. Hier liegt der
Schlüssel zu den Kriterien, nach denen die Aufteilung der Daten vorgenommen
werden muß.
2.1. MOTIVATION
31
Methodik zur Parallelisierung:
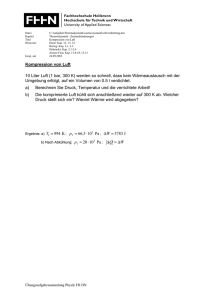
Die Parallelisierung eines Problems läßt sich methodisch in vier Schritte zerlegen (vgl. Abb. 2.2) [10], wobei sich die angegebenen Beispielsituationen auf
einen datenparallelen Ansatz beziehen:
1 Partitionierung: Das Problem soll in viele möglichst unabhängige Teilprobleme zerlegt werden. Eine große Anzahl von Teilproblemen läßt eine
feingranulare Aufteilung des Aufwands und dadurch auch den Einsatz einer großen Anzahl von Prozessoren zu.
Beispiel: Die elementweise Berechnung der lokalen Steifigkeitsmatrizen
in einem Finite Elemente Verfahren oder die flächenweise Berechnung
der numerischen Flüsse in einem Finite Volumen Verfahren können als
atomare d.h. nicht mehr weiter zu zerlegende Teilprobleme angesehen
werden.
2 Kommunikation: Die Zusammenhänge zwischen diesen Teilproblemen
müssen herausgefunden werden. Dazu ist zu untersuchen, welche Teilprobleme auf welche Art miteinander gekoppelt (verbunden) sind.
Teilprobleme
Problem
Partitionierung
Kommunikations−
struktur
Agglomeration
Prozessorzuweisung
Abbildung 2.2: Vierstufiges Vorgehen zur Parallelisierung durch Partitionierung
des Problems, Analyse der Kommunikationsstruktur, Agglomeration und Prozessorzuweisung.
32
KAPITEL 2. PARALLELRECHNER
Beispiel: Für ein numerisches Verfahren zeigt in der Regel bereits die mathematische Struktur der Diskretisierung die Zusammenhänge zwischen
den Daten: Häufig findet man Zugriffe entlang der geometrischen Relationen Element-Knoten, Element-Nachbarelement, Fläche-Element usw.
3 Agglomeration: Die Teilprobleme sollen zu größeren Einheiten zusammengefaßt werden, innerhalb derer möglichst viele der im zweiten Schritt
identifizierten Zusammenhänge bereits enthalten sind. Agglomeration
bietet sich an, wenn das Problem entsprechende Strukturen aufweist. Die
Anzahl der zu bildenden Einheiten ist von der Anzahl der einzusetzenden
Prozessoren (Prozesse) unabhängig.
Beispiel: Verfeinerungsstrukturen oder algebraische Strukturen des numerischen Verfahrens wie z.B. in Multilevel- oder Mehrgitterverfahren [5]
definieren Zusammenhänge, die auch eine Basis für die Agglomeration
darstellen (vgl. Kap. 4.1.1).
4 Prozessorzuweisung: Die jetzt wesentlich kleinere Anzahl von Agglomerationseinheiten wird auf die Anzahl der verfügbaren Prozessoren abgebildet. Hierzu ist vorausgesetzt, daß erheblich mehr dieser Einheiten
gebildet wurden, als letztlich Prozessoren eingesetzt werden sollen.
Beispiel: Betrachtet man die im Zuge der Agglomeration gebildeten Einheiten als Knoten eines Graphen mit einem ihrem Operationsinhalt entsprechenden Gewicht und deren Zusammenhänge untereinander als gewichtete Kanten dieses Graphen dann kann das Problem der Prozessorzuweisung (engl.: mapping) als allgemeines Partitionierungsproblem für
einen ungerichteten Graphen angesehen werden (vg. Kap. 4.6.1).
2.2 Ausführungsmodelle
Um theoretische Vorhersagen zur Ausführungszeit einer parallelen Anwendung
begründen zu können, muß ein Modell festgelegt werden, mit dem das reale
System Parallelrechner beschrieben wird.
2.2.1 Von Neumann Modell
Das anerkannte Modell für einen Rechner mit einem Prozessor und einer Verbindung zu seinem völlig homogenen Hauptspeicher ist das Von Neumann Modell (vgl. Abb. 2.3) [18].
Definition: Das Von Neumann Modell nimmt an, daß der Prozessor jedes
Datum und jede Anweisung aus dem Hauptspeicher lädt, wozu jedesmal eine
konstante Zeit kjlFm notwendig ist. Die nachfolgende Ausführung der Anwei3n
sung benötigt ihrerseits eine Zeit
, die nur von der Art der Anweisung
<
< `. `
2.2. AUSFÜHRUNGSMODELLE
33
< WV `
abhängt. Das Schreiben der Ergebnisse in den Hauptspeicher soll ebenfalls
eine konstante Zeit po jq erfordern.
Weil die Zeiten zum Laden bzw. Schreiben der Daten und für die Ausführung
einer Anweisung nicht von der Vorgeschichte abhängen, läßt sich die Gesamtlaufzeit für manche numerische Algorithmen mit diesem Modell leicht vorhersagen: Dazu sind alle Lade-, Schreib- und arithmetischen Operationen des
numerischen Verfahrens für eine festgelegte Problemgröße aufzusummieren.
2.2.2 PRAM Modell
Die logische Ausdehnung des Von Neumann Modells auf die parallele Programmausführung stellt das PRAM Modell dar (vgl. Abb. 2.3) [18].
Definition: Das PRAM (Parallel RAM) Modell geht von mehreren Prozessoren, die einen gemeinsamen Hauptspeicher teilen, aus und sieht jedes Teilsystem Prozessor-Hauptspeicher als Von Neumann Architektur an. Hinzu kommt
die Annahme, daß alle Operationen, also auch jene, die den gemeinsam genutzten Speicher berühren, von allen Prozessoren gleichzeitig und ohne gegenseitige zeitliche Beeinflussung ausgeführt werden können.
Das PRAM Modell vermittelt bereits eine entscheidende Ausdehnung des Einblicks in die Programmausführung auf Parallelrechnern, denn die Programmausführung verläuft im Unterschied zur sequentiellen Situation abwechselnd in
zwei Phasen:
- Der betrachtete Prozessor bearbeitet gerade den ihm zugeordneten Instruktionsstrom.
- Der betrachtete Prozessor wartet algorithmenbedingt die Ausführung eines Instruktionsstromes auf einem anderen Prozessor ab.
Demgegenüber befindet sich ein Von Neumann Rechner immer in der ersten
Phase. Die Programmausführung auf einem Mehrprozessorsystem weist in der
Prozessor
Hauptspeicher
Prozessor
Prozessor
Prozessor
Hauptspeicher
Abbildung 2.3: Von Neumann Modell (links) und davon abgeleitetes PRAM Modell
eines Multiprozessors (rechts) für die theoretische Betrachtung der Laufzeit einer
Programmausführung (Anwendung).
34
KAPITEL 2. PARALLELRECHNER
Analyse unter den Annahmen des PRAM Modells eine nichttriviale Laufzeitstruktur auf, die aus einer abwechselnden Folge dieser zwei Phasen besteht.
Bemerkung: Für einige einfache Algorithmen mit einer festgelegten Aufteilung der zu bearbeitenden Teilprobleme kann die Laufzeitstruktur durch theoretische Überlegungen ermittelt werden, aus der wiederum die Programmlaufzeit mit dem PRAM Modell bestimmt werden kann. Ein solcher Algorithmus ist
z.B. die systolische Multiplikation zweier Matrizen (block-multiply-roll scheme)
[28].
}
2.2.3 Bulk Synchronous Parallel Modell
Bedingt durch die großzügigen Annahmen im PRAM Modell für einen Multiprozessor hängt die Beschleunigung (2.1) allein vom Algorithmus und der
gleichmäßigen Aufteilung der Operationen ab. Die Praxis sieht aber oft anders aus: Verbindungsnetzwerke oder gemeinsamer Speicher bedingen in der
Regel einen gegenseitigen Ausschluß und damit zusätzliche Kommunikationsund Wartezeiten, die nicht aus der statischen Analyse des Algorithmus, der
Datenaufteilung und dem PRAM Modell vorhergesagt werden können. Deshalb wurden weitere Modelle entwickelt, die mit zusätzlichen Parametern ausgestattet sind.
Bemerkung: Auf der Seite der Programmentwicklung wurden die eingeschränkten Möglichkeiten der Rechnersysteme ebenfalls zur Kenntnis genommen, was u.a. zu Strategien wie dem Latency-Hiding“ geführt hat. Gemeinsam
”
ist solchen Techniken, die Reihenfolge der logischen Programmausführung
an einigen Stellen zur Laufzeit zu bestimmen, weil erst dann die Option
mit der kleinsten Wartezeit erkannt wird. Die Programmausführung wird dadurch allerdings nichtdeterministisch, was eine theoretische Betrachtung nahezu unmöglich macht.
}
Das Bulk Synchronous Parallel (BSP) Model [39] verfolgt einen Mittelweg zwischen Theorie und Praxis, wobei die Forderungen an parallele Algorithmen,
die sich durch das BSP Modell beschreiben lassen, so gewählt sind, daß sie
noch effiziente Implementierungen zulassen. Das BSP Modell unterteilt einen
Parallelrechner in drei funktionale Einheiten:
1. Eine Anzahl an Komponenten, von denen jede Berechnungen oder externe Speicheranforderungen bearbeiten kann.
2. Ein Router, d.h. ein Verbindungsnetzwerk, das Nachrichten (vgl. Kap. 2.3.1)
zwischen Paaren von Komponenten transportiert.
3. Ein globaler Mechanismus zur Synchronisation mehrerer oder aller Komponenten in festgelegten Zeitabschnitten. Die Programmausführung läuft
damit in Supersteps, also strukturiert in größere Blöcke, ab. Entscheidend
2.3. PROGRAMMIERMODELL
35
ist, daß die Zeitspanne, die für einen Schritt aufgewendet wird, immer
gleich bleibt. Falls eine Komponente des Rechners die Ausführung des
Blocks nicht innerhalb des Supersteps abschließen kann, wird ein weiterer Schritt für diesen Anweisungsblock eingeschoben. Nach dem Ablauf
der Synchronisation sind alle Nachrichten und alle Zugriffe auf den Speicher einer externen Komponente konsistent übertragen.
Bemerkenswert ist, daß versucht wird statisch festzulegen, welche Teile der
Programmausführung parallel stattfinden sollen. Hier liegt das Bindeglied zur
Agglomeration aus der Methodik zur Parallelisierung (vgl. Kap. 2.1.3), wenn
von einem programmparallelen Ansatz [15] ausgegangen wird. Alle Algorithmen sind so zu strukturieren, daß die Ausführung jedes Blocks in der Zeit eines
Supersteps abgeschlossen werden kann. Dem liegt die Idee zugrunde, durch
die Emulation mehrerer virtueller Prozessoren auf einer physikalischen Komponente des BSP Rechners eine Lastverteilung auf dem Niveau der Ausführungsblöcke durchzuführen.
Die wesentliche Konsequenz, die aus der Untersuchung des BSP Modells für
die Entwicklung des parallelen Simulationsprogramms gezogen wird, ist die
strikt synchrone Auslegung aller parallelen Teilalgorithmen. Eine Gliederung
nach Anweisungsblöcken findet nicht statt, vielmehr sind die Zeiträume zwischen Synchronisierungspunkten unterschiedlich lang. Eine gleichmäßig verteilte Ausführungszeit über alle Komponenten hinweg muß durch die explizit im
Algorithmus vorgesehene dynamische Lastverteilung erfolgen (vgl. Kap. 4.6).
2.3 Programmiermodell
Bei der Untersuchung einiger etablierter Modelle zur Programmierung von Parallelrechnern wird man feststellen, daß die meisten davon sich stark am Machbaren und damit an der verfügbaren Rechnertechnologie orientieren. Dies ist
einigermaßen natürlich, denn der Anwender eines Parallelrechners möchte bei
der Entwicklung seiner Programme zunächst sicherstellen, daß die teuer bezahlte Leistung auch absolut effizient eingesetzt wird.
Die Betrachtung beschränkt sich hier auf das Message Passing Programmiermodell, das in unterster Schicht des parallelen Simulationsprogramms dazu
beiträgt, in grundlegenden Funktionen von der betreffenden Rechnerarchitektur abstrahieren zu können (vgl. Kap. 5.8).
Die technologischen Wurzeln des Message Passing Programmiermodells liegen im Bereich der Programmentwicklung für Multicomputer, weshalb es in
seiner Definition besonders auf die technologischen Grenzen dieser Systeme
eingeht.
36
KAPITEL 2. PARALLELRECHNER
2.3.1 Das Message Passing Programmiermodell
Das Message Passing Programmiermodell sieht den Austausch von Daten zwischen zwei oder mehreren völlig autonomen Prozessen als Kernaufgabe an.
Auf die Möglichkeit Daten aus den Adreßbereichen der verschiedenen Prozesse identifizieren zu können, wird bereits im Ansatz verzichtet. An die Stelle der
Identifikation von statischen Speicherorten auf Prozeßniveau tritt die Identifikation von Nachrichten, also der mobilen Daten: Praktisch alle Ansätze stellen
sicher, daß Nachrichten unverfälscht zwischen identifizierten Prozessen in deterministischer Reihenfolge ausgetauscht werden können.
Definition: Unter Nachricht wird im Message Passing Programmiermodell eine Menge von Daten verstanden, die von einem Prozeß der verteilten Anwendung einem anderen zugänglich gemacht wird, wobei ein Einverständnis über
Bedeutung und Inhalt (Typ) auf der Basis eines eindeutigen Namens für die
Nachricht erreicht wird.
Das Message Passing System, das gegenüber dem Anwender die im Message
Passing Programmiermodell festgelegte Funktionalität als technische Lösung
realisiert, hat keine Kenntnis davon, wie die Nachrichten mit den Daten und
Prozeduren der Anwendung zusammenhängen, diese Information ist erst auf
dem Niveau der Anwendung durch Identifikation der Prozesse und Namenskonventionen für die Nachrichten angelegt.
Damit lassen sich die notwendigen Funktionen einer entsprechenden Programmiersprache oder Bibliothek zusammenfassen (vgl. Abb. 2.4):
Prozess
Anwendung
Identifikation
Anwendung
Nachricht anfragen
?
Nachricht abgeben
4
8
Message Passing Bibliothek
Nachricht erhalten
Message Passing Bibliothek
Nachricht ausliefer n
Nachricht
codieren
Eingegangene Nachri chten
Nachricht
decodieren
Abbildung 2.4: Schematischer Nachrichtenaustausch im Message Passing Programmiermodell: Über die Prozeßgrenze hinweg findet die Identifikation des
Adressaten und der Austausch der Nachricht statt.
2.3. PROGRAMMIERMODELL
37
Funktionsumfang eines Message Passing Systems
4
Die Möglichkeit unter allen beteiligten Prozessen einzelne Prozesse oder Prozeßgruppen identifizieren zu können.
Mögliche Erweiterungen sind logische Verbindungen in einer
Prozeßtopologie (Baum, Ring, Torus, Würfel usw.).
Funktionen zum Versenden und Empfangen von Nachrichten zu bzw. von identifizierten Prozessen, eventuell gegliedert
nach synchronem (blockierendem) und asynchronem (nicht
blockierendem) Nachrichtenaustausch.
Falls die Darstellung der Daten (z.B. Gleitkommazahl) nicht
einheitlich ist, wird durch das Message Passing System eine
Konversion (Codierung) vorgenommen.
Hat man sich mit dem Message Passing Modell bereits auf einen Standard im
Entwurf für verteilte parallele Programme geeinigt, dann liegt es nahe, auch
die Gliederung der Funktionalität in Prozeduren und deren Aufrufsyntax für
die gängigen Programmiersprachen zu vereinheitlichen. Dies ist mit der Verabschiedung des Message Passing Interface Standards MPI geschehen, der
im Jahr 1993 als Entwurf vorgestellt worden war.
Der MPI Standard
Der Message Passing Interface Standard MPI [26] ist derzeit der wichtigste
Vertreter eines Standards für Implementierungen des Message Passing Modells. Das im Rahmen dieser Arbeit entwickelte parallele Simulationsprogramm
greift nur auf einen kleinen Ausschnitt aus dem standardisierten Funktionsumfang einer MPI-konformen Kommunikationsbibliothek zurück:
r
r
Funktionen zur Identifikation der Prozesse, von denen die jeweiligen Teilgitter bearbeitet werden.
r
Punkt zu Punkt Kommunikation mit codierten oder binären Daten.
r
Globale (engl.: all to all) Kommunikationsvorgänge zur Verteilung von einzelnen Werten oder Vektoren mit verschiedenen Datentypen.
Globale (kollektive) Operationen zur Bildung von Summe, Maximum oder
Minimum einer Gleitkomma- oder Integerzahl.
Bemerkung: Message Passing ist keine Strategie zur Parallelisierung, auch
wenn manche Formulierungen dies suggerieren. Message Passing ist eine
Strategie, von den Verbindungen innerhalb eines Parallelrechners Gebrauch
zu machen, und schränkt die Auswahl des Vorgehens zur Parallelisierung ofts
mals tatsächlich auf einen datenparallelen verteilten Ansatz [15] ein.
38
KAPITEL 2. PARALLELRECHNER
2.4 Leistungsmessung
Als Motivation für die parallele Verarbeitung einer Anwendung werden Gründe
genannt, die sich mehrheitlich auf die wesentlich höhere erreichbare Rechenleistung beziehen. Die aus der Parallelisierung resultierenden Leistungsgewinne müssen daher gemessen und bewertet werden.
Ausführungszeit
Definition: Als Ausführungszeit t eines Programmlaufs (Anwendung) auf einem bestimmten Rechnersystem wird die kürzeste erreichbare Zeitspanne, gemessen in der Realzeit (engl.: wall-clock time), zwischen dem Start und dem
regulären Beenden der Anwendung definiert.
Diese Definition läßt sich sinngemäß auch auf die Ausführungszeit eines Teilprogramms ausdehnen. Sie schließt die gleichzeitige Abarbeitung verschiedener Anwendungen auf einem Rechner aus, weil nur ein exklusiver Betrieb die
kürzeste Verweilzeit realisieren kann.
Beschleunigung
Definition: Als Beschleunigung udvxw+w (engl.: Speedup) der Programmausführung durch die Parallelverarbeitung wird das Verhältnis der Ausführungszeiten
tzy{| , tzy~}A| des parallelen Verfahrens auf identischen Rechnersystemen mit verschiedenen Prozessorzahlen {} definiert:
u vxw+w y{}A|
tzy}A|
t,y{|
{}
(2.1)
Häufig wird als Bezugswert die Ausführungszeit auf einem Rechner mit einem
Prozessor tzy}6| gewählt:
udvxw+wy{|
tzy36|
tzy{|
{
(2.2)
Ein Beschleunigungswert u vxw+w y{}A| bzw. u vxw+w y{|`>{ heißt superlinear.
Diese Definition der Beschleunigung läßt offen, in welcher Beziehung die Programme zueinander stehen, die auf den { bzw. } Prozessoren eingesetzt werden, insbesondere falls } ist.
Für die Praxis ist jedoch die Forderung, es solle grundsätzlich gegen die absolut optimale sequentielle Implementierung getestet werden (2.6), wenig geeignet, denn sie dehnt die beabsichtigte Bewertung des Entwurfs für das verteilte
Programm auf die Wahl der numerischen Verfahren, der Algorithmen und der
Programmiersprache aus.
Es erscheint vernünftig und zulässig, ein Programm, das für eine variable Anzahl von Prozessoren entworfen wurde, gleichermaßen auf { und } Prozessoren zu messen, selbst wenn } ist (vgl. Kap. 6.3.1, Tab. 6.2).
2.4. LEISTUNGSMESSUNG
39
Effizienz
Definition: Direkt von der Beschleunigung abgeleitet ist die Effizienz der Parallelisierung, die als Verhältnis von realer und theoretisch möglicher Beschleunigung gegeben ist:
36
uvxw+wy{}A|
Z
{A}
(2.3)
Die Grundlage für diese Definition ist das Theorem zur Begrenzung der Beschleunigung (2.6).
Skalierung
Definition: Sei t
<yC| die Zeit die für das Problem auf einem Rechner mit
Prozessoren benötigt wird, dann ist das -skalierte Problem H¡ zu dadurch
bestimmt, daß auf einem idealisierten Einprozessorsystem (Von Neumann Architektur) für die gemessenen Ausführungszeiten t¢_£ ¤<y|¥¦ ¡~t
¤<y| gilt. Dann
wird für alle 8~{§©¨ als Skalierung (Skalierfähigkeit, Skalierbarkeit, engl.: scalability) ª w+vX«3y8{| des parallelen Verfahrens auf { Prozessoren das Verhältnis
ª w+vX« yC8{|Z
t y{|
t
¬£ yC­¡3{|
A{®
(2.4)
bezeichnet. Für {¯ hat man den von { unabhängigen Ausdruck:
ª w+vX« yC|<Z
t<y|
t
£ yC|
(2.5)
Falls der für das betrachtete Verfahren erreichbare Speedup durch das Verhält
nis der Prozessorzahlen begrenzt ist, d.h. es gilt u vxw+w y¡{{|h°±¬ £ ² , dann
folgt für die Skalierung ª w+vX« y8{|h° . Diese Schranke für die Beschleunigung
ist nicht willkürlich gewählt: Erwartungsgemäß sollte das Verhältnis der Prozessorzahlen der maximal erreichbare Speedup sein, wie das nachfolgende
Theorem feststellt.
Begrenzung der Beschleunigung
Theorem: Unter der Voraussetzung, daß als Referenzwert tzy36| die Laufzeit
eines in jeder Hinsicht absolut optimalen sequentiellen Programms für die festgelegte Problemstellung in (2.2) eingesetzt wird, ist die durch eine parallele
Verarbeitung erreichbare Beschleunigung durch
u vFw+w y{|°-{
begrenzt [28].
(2.6)
40
KAPITEL 2. PARALLELRECHNER
Beweis: Es wird ein superlinearer Speedup uvFw+wy{|³´{ angenommen.
Dann läßt sich ein sequentieller Algorithmus durch logisches Nacheinanderausführen der parallelen Teilprogramme konstruieren [28], der im Widerspruch
zur Voraussetzung schneller als die Referenzimplementierung ist.
µ
Im praktischen Versuch werden unter Umständen Beschleunigungswerte beobachtet, die größer als das Verhältnis der Prozessorzahlen sind, was aber
kein Gegenbeispiel zur obigen Behauptung darstellt, sondern mit technischen Eigenschaften der verwendeten Rechnerarchitekturen begründet werden kann: Moderne Einprozessorsysteme, aus denen manche Parallelrechner zusammengesetzt sind, bearbeiten Probleme mit kleinerem Datenumfang
durch die Hierarchie ihrer Speicherkomponenten schneller – und sind damit
keine echten Realisierungen des Von Neumann Modells, das dem Theorem
implizit zugrunde liegt (vgl. Kap. 2.2.1).
2.4.1 Berücksichtigung der dynamischen Lastverteilung
Eine dynamische Lastverteilung wird in einem parallelen Programmentwurf
vorgesehen, falls davon auszugehen ist, daß die Belastung der einzelnen Prozessoren während der Programmausführung den anfangs eingestellten optimalen Zustand verläßt. Hierbei stellt sich allerdings die Frage, welche Beschleunigung bei einer vorgegebenen Schranke für die Ungleichverteilung der
Prozessorbelastung überhaupt theoretisch erreichbar ist.
Intuitiv ist klar, daß es wohl keinen Sinn macht, einerseits nach optimalem
Speedup zu fragen, wenn andererseits aus Gründen, die in der Problemstellung zu suchen sind, in einer Anwendung sehr großzügige Schranken für die
dynamische Lastverteilung gewählt werden.
Da sich die Definition der Effizienz eines parallelen Verfahrens (2.3) auf die
erreichbare Beschleunigung und damit auf das Theorem (2.6) bezieht, liegt
es nahe, die Aussage des Theorems auf die Situation mit ungleich verteiltem
Aufwand zu erweitern.
Theorem: Gelte für die Ausführungszeit t p¶ y36| der { Teilprobleme ·C¸ ·¹º¸Z»Z»Z»Z¸
einer parallelen Anwendung auf einem idealisierten Einprozessorsystem mit
einer Konstanten ¼½§½¾¿{dÀ :
ÁHÂ
Ì8Í
§-ÿFk{Ä
Åt
¶ y36|bƼÈtÇ
§-ÿFk{Ä
Ç
Åt ËAy36|9ÎÐÒ
Ï Ñ ¼ t
t
Ç
{
É
Ê ¹º
tpËAy3|
dann ist die erreichbare Beschleunigung der parallelen Ausführung auf { Prozessoren durch
{
(2.7)
uvxw+wy{|¯Æ udÇ vxw+wy{|
¼
begrenzt.
2.4. LEISTUNGSMESSUNG
41
Beweis: Für die parallele Bearbeitung wird ein PRAM Parallelrechner vorausgesetzt: Die Gesamtausführungszeit t ist das Maximum aller Summen aus der
v «
Bearbeitungszeit t · X ¦t p¶ und der algorithmenbedingten Wartezeit t · ·ÔÓ« für
Â
jeden Prozessor . Für die gemessene Beschleunigung udvxw+wy{| erhält man mit
den Argumenten aus dem Beweis zu Theorem (2.6)
uvxw+wy{|Z
tzy|
tzy{|
v «
·k¹º t · X
Õ
v «
·Ó«
ÖØ×AÙ
t · X Û t ·
·¹º»Z»
Ü
&Ú
(2.8)
denn die algorithmenbedingten Wartezeiten treten bei einer sequentiellen Abarbeitung des Algorithmus nicht auf. Vernachlässigt man weiterhin die lokalen
algorithmenbedingten Wartezeiten, erhält man die (formale) Abschätzung
u vxw+w y{|°
v «
·k¹º t · X
v «
·k¹ºX»Z» t · X
Õ Ù
ÖØ×Ý
(2.9)
aus der wiederum die Behauptung folgt. Die Abschätzung (2.9) ist genau dann
scharf, wenn der Algorithmus optimal parallel ausführbar ist (engl.: embarassingly parallel).
µ
Steuerung der Lastverteilung
Definition: Im Rahmen dieser Untersuchung wird als Steuerung der dynamischen Lastverteilung ein Kriterium bezeichnet, das den Vorgang der Neuberechnung einer Gitteraufteilung und der Umverteilung des Gitters auslöst,
wobei davon ausgegangen wird, daß die Aufteilung selbst vom Kriterium unabhängig ist und jeweils den bestmöglichen Zustand annimmt.
Die Ungleichung (2.9) zeigt vor diesem Hintergrund, wie die Steuerung der
Lastverteilung auszusehen hat, d.h. wann eine neue Verteilung des Gitters
stattfinden soll: Das Kriterium ist die maximale Abweichung des lokalen Aufwands vom Mittelwert; mit anderen Worten: Die längste Bearbeitungsdauer
dominiert das Geschehen und legt den erreichbaren Speedup fest: Wird beispielsweise eine maximale Abweichung der Laufzeit von
v «
t · X °)Þàßá
{
É
Ê ¹º
v «
t Ê X âã
®Þät Ç
v
X
«
ÁÂ
å¿k {VÞ­§9¾k{OÀ
(2.10)
vorgegeben und eingehalten, ergibt sich daraus für die theoretisch erreichbare
Beschleunigung udÇ vxw+wy{|
{
Þ
Îkæ °
ȍ
ȏ
Ñ u vFw+w kÎ æ é
° Ñ {
Ç
(2.11)
Für die Beschleunigung, die in der realen Ausführung des Programms gemessen wird, gilt uvFw+wêÆ udÇ vxw+wë§ì¾ í {dÀ . Die Anwendung dieser Ergebnisse auf
eine konkrete Situation ist allerdings schwierig, denn solange die genaue Verteilung des Aufwands nicht exakt bekannt, sondern nur durch eine Schranke
(2.10) abgeschätzt ist, kann auch kein Zielwert für die Beschleunigung in die
Berechnung der Effizienz des Verfahrens (2.3) eingesetzt werden.
42
KAPITEL 2. PARALLELRECHNER
Hinweis: Obwohl die Begrenzung der maximalen Abweichung (2.10) an der
richtigen Stelle angreift und außerdem eine untere Grenze von
ÖØ×ÝÙ
yîOF<ïy~Þðïä|
y{Øïñ6||t Ç
v
X
«
v «
°ñt ·
ÁÂ
å {
impliziert, kann von der Steuerung der dynamischen Lastverteilung im parallelen Simulationsprogramm auch die Abweichung der kürzesten Ausführungszeit
vom Mittelwert kontrolliert werden: Es sind somit zwei Konstanten ò«óô +õ und
+õ festzulegen, mit der Eigenschaft, daß die dynamische Lastverteilung geòxö
nau dann eine neue neue Aufteilung des Gitters berechnet und durchführt,
wenn eine der Ungleichungen
ÖØ×ÝÙ
v «
v «
yò«óô +õ F<ïy~Þðïä|py{Øï|3|÷t Ç X °ät · X Æòxö
verletzt ist (vgl. Kap. 4.6.1, 5.6.1).
X
ÁÂ
3õ t Ç v X «
{
(2.12)
s
43
Kapitel 3
Objektorientierter
Basisentwurf für das
Simulationsprogramm
Nachfolgend werden die zentralen Ideen des Programmentwurfs für ein verteiltes paralleles adaptives Gitter vorgestellt. Die Darstellung orientiert sich der
Form nach an dem, was in der objektorientierten Analyse und Programmentwicklung in neuerer Zeit entwickelt wurde [7]. Dadurch wird erreicht, daß die
Strukturen und Algorithmen, die letztendlich in der Implementierung ein- und
umgesetzt sind, auch ohne Zugriff auf den Quellcode verständlich und auf ähnliche Probleme anwendbar sind. Die Dokumentation des Programmentwurfs
und der Implementierung erhält dadurch außerdem eine günstige Gliederung:
r
r
Alle grundlegenden Strukturen des Entwurfs, Konzepte und Algorithmen
werden in diesem Kapitel besprochen.
r
Die Erweiterungen, die es ermöglichen, das Programm auf verteilt parallelen Rechnerarchitekturen auszuführen, sind im nächsten Kapitel dargestellt (vgl. Kap. 4).
Die Konzeption der Implementierung, ihre Strukturierung und und Realisierung mit den Mitteln der Programmiersprache C++ finden sich in einem weiteren Kapitel (vgl. Kap. 5).
Hinweis: Es wird davon abgesehen, in der Dokumentation direkt mit den
Klassen-, Methodennamen usw. aus dem Vokabular des Quellcodes umzugehen. Einerseits sind sehr viele dieser Namen aus verkürzten englischen Begriffen zusammengesetzt, andererseits stellen sich die Namen, die während
der Entwicklung eines Programms festgelegt wurden, am Ende oft als nicht
44
KAPITEL 3. BASISENTWURF
unbedingt glücklichste Wahl heraus. Die in den folgenden Kapiteln gewählten Namen sind deshalb der Forderung nach Präzision und Klarheit folgend
nachträglich ausgesuchte in der Regel deutschsprachige Begriffe oder Begriffskombinationen.
s
3.1 Objektorientierte Programmentwicklung
Objektorientierte Ansätze in der Analyse und Programmentwicklung [4] haben
gerade in den letzten Jahren eine schwunghafte Verbreitung erfahren. Programmiersprachen, die auf objektorientierten Konzepten aufsetzen, sind schon
recht lange bekannt; was im wesentlichen neu hinzukommt, ist die Erkenntnis,
wie durch die Anwendung dieses Paradigmas komplexe Aufgaben strukturiert
und die zugehörigen Programme in einen übersichtlicheren Zustand gebracht
werden können.
Objektorientierte Entwürfe eignen sich für die Auslegung grafischer Benutzeroberflächen ebenso, wie zur Modellierung von Geschäftsprozessen und Produktionsabläufen. Allem gemeinsam ist, daß eine objektorientierte Sicht nur
schwach von den realen Strukturen abstrahieren muß. Sie eignet sich deshalb besonders gut zur Beschreibung von Gegenständen der realen Welt (statisches Modell) und deren Zusammenwirken (dynamisches Modell) [4].
Die Anwendung objektorientierter Analysestrategien auf numerische Verfahren
drängt sich nicht sofort auf, es könnte sogar vermutet werden, daß eine funktionale Beschreibung den abstrakten mathematischen Inhalten besser gerecht
wird. Beachtet man jedoch, daß in modernen numerischen Verfahren, wie beispielsweise den Finite Elemente oder Finite Volumen Verfahren, die Verwaltung
des Gitters, also der Aufteilung des Berechnungsgebiets in passende Kontrollvolumen, immer wichtiger für die Leistungsfähigkeit aber auch immer komplexer wird, deutet sich der Zugang über eine objektorientierte Modellierung an:
Das Gitter wird als eine Sammlung vieler gleichartiger oder ähnlicher Objekte
(Elemente, Flächen, Kanten und Knoten) angesehen, die miteinander in bestimmten Beziehungen stehen und im Zusammenwirken Anforderungen von
”
außen“ erfüllen.
Die nachfolgend dargestellte Modellierung des geometrischen Gitters und
der mathematischen Strukturen des numerischen Verfahrens für das verteilte Simulationsprogramm ist nicht grundsätzlich als Folge einer vollständigen
und strikten objektorientierten Analyse entstanden, sondern oftmals auch als
vernünftige Lösung, zu der es durchaus noch Alternativen geben kann. Insofern werden in diesem Abschnitt nur die tatsächlich verwendeten grafischen
Notationen der Dokumentation des Entwurfs vorgestellt, auf die Erörterung von
Vorgehensschemata, Use Cases usw. wird verzichtet. Die grafischen Darstellungen lehnen sich an jene der Unified Modeling Language (UML) [7, 11] an,
verwenden aber nicht deren gesamten Umfang an Bildelementen.
3.1. OBJEKTORIENTIERTE PROGRAMMENTWICKLUNG
45
3.1.1 Darstellung der Klassenbeziehungen
Die statischen Informationen des Entwurfs sind die Beziehungen zwischen
den verschiedenen Klassen bzw. deren Instanzen (Exemplaren, Objekten), die
bereits vor der Ausführung des Programms bekannt sind. Diese Strukturen
werden in Form von Klassendiagrammen beschrieben. Der folgende Abschnitt
stellt die verwendeten Symbole und Notationen vor.
Klassendiagramme
Jede Klasse wird im Klassendiagramm (vgl. Abb. 3.1-3.3) mindestens durch
ein Rechteck mit dem fettgedruckten Klassennamen dargestellt. Soweit nötig
sind die Attribute (Instanzenvariablen) der Klasse in einem weiteren Feld darunter mit ihrem jeweiligen Typ eingetragen. In diesem Feld sind gegebenenfalls
auch die Klassenvariablen (Attribute der Metaklassse), die statischen Attribute
in C++ dargestellt: Sie sind zur Unterscheidung unterstrichen.
Deutlich wichtiger für das Verständnis der Klassendiagramme sind die innerhalb einer Klasse definierten Methoden (Operationen), die in einem Rechteck
an unterster Stelle eingetragen sind. Jede Operation wird durch ihren Namen
mit sich anschließendem Klammerpaar, das die Argumente enthält, bezeichnet. Der Typ des Rückgabewerts folgt nach einem Doppelpunkt:
Operation (Argument : Typ des Arguments, ...) : Typ des Rückgabewerts.
Auf die Angabe von Zugriffsmöglichkeiten wird sowohl bei den Attributen als
auch bei den Operationen verzichtet. Der Klassenname ist kursiv geschrieben,
falls eine abstrakte Klasse vorliegt, von der keine Instanzen erzeugt werden
können. In diesem Fall ist mindestens eine Operation abstrakt, die ebenfalls
kursiv geschrieben wird.
Falls alle definierten Operationen abstrakt sind und die Klasse keine Attribute
ausweist, handelt es sich um eine Schnittstellenklasse, genauer um die Definition einer polymorphen Schnittstelle.
Andererseits können auch nicht-abstrakte Klassen eine Schnittstelle beschreiben, z.B. für den Typparameter einer parametrisierbaren Klasse, weshalb sol-
KlassenName
Instanzenvariable : Typ
Klassenvariable : Typ
Instanzenoperation (Argument : Typ) : Typ
Klassenoperation (Argument : Typ) : Typ
Abbildung 3.1: Darstellung einer Klasse im Klassendiagramm. Oben ist fettgedruckt der Klassenname eingetragen, darunter folgen die Attribute bzw. unterstrichen die Klassenvariablen. An unterster Stelle sind die Methoden bzw. unterstrichen die Methoden der Metaklasse angegeben [11].
46
KAPITEL 3. BASISENTWURF
che Klassen oberhalb des Namens durch die Angabe des Stereotyps interface
kenntlich gemacht sind.
Die Hilfsmittelklasse wird gekennzeichnet durch das Stereotyp utility und dient
der Zusammenfassung gemeinsam benutzter Konstanten als Klassenvariablen.
Eine weitere Notationsergänzung benötigt die parametrisierbare Klasse (Schablone, Templateklasse): Oben rechts sind in einem Rechteck mit unterbrochener Umrißlinie der oder die Typparameter eingetragen. Die Ausprägung einer
Schablone mit einem bestimmten Typ (Spezialisierung) wird durch einen unterbrochenen Pfeil mit leerer Spitze, der auf die parametrisierbare Klasse zeigt,
kenntlich gemacht (vgl. Abb. 3.2).
Vererbungsrelationen:
Vererbungsrelationen [4] zwischen Klassen werden durch eine Linie, mit einem
leeren Dreieck an der Spitze dargestellt (vgl. Abb. 3.3). Das Dreieck zeigt auf
die Basisklasse (Oberklasse) die üblicherweise auch in der Zeichnung oberhalb der von ihr abgeleiteten Klasse (Unterklasse) angeordnet ist.
Zusätzliche Notizen und Erklärungen, die sich auf die Implementierung einzelner Methoden beziehen, werden in einem Feld mit Eselsohr“ untergebracht.
”
Liegt mehrfache Vererbung vor, führen mehrere Linien zu Basisklassen. Mehrfache Vererbung kann problematisch sein, falls die unmittelbaren Basisklassen
wiederum eine gemeinsame Basisklasse beerben: Deren Attribute und Operationen sind dann nicht mehr eindeutig.
Die Programmiersprache C++ [29] läßt dies zwar zu, der Abwärtsbezug auf die
Basisklasse muß dann aber bei jedem Zugriff eindeutig qualifiziert werden. Die
Implementierung macht von dieser Möglichkeit keinen Gebrauch.
Falls hingegen eine Schnittstelle indirekt mehrfach beerbt wird, kann mit C++
diese Schnittstelle als virtuelle Basisklasse angelegt werden. Der Abwärtsbezug auf die Schnittstelle ist dann wieder eindeutig.
<< utility >>
Hilfsmittelklasse
Attribute
<< interface >>
SchnittstellenKlasse
Typparameter
TemplateKlasse
less(x : KlasseB) : bool
Methoden
TemplateKlasse < Int >
Abbildung 3.2: Klassendiagramm: Spezielle Klassen erhalten eine Kennzeichnung oberhalb des Klassennamens. Hilfsmittelklasse (links) und Schnittstellenklasse (Mitte). Rechts die Darstellung einer parametrisierbaren Klasse (Templateklasse, Schablone) [11].
3.1. OBJEKTORIENTIERTE PROGRAMMENTWICKLUNG
47
Beziehungen zwischen den Objekten:
Weiterhin sind in das Klassendiagramm die Beziehungen zwischen den Instanzen der dargestellten Klassen (den Objekten) eingetragen. Durch die Mittel der
Programmiersprache C++ [11] (Zeiger und Referenzen) entstehen gerichtete
Beziehungen mit nur einer Möglichkeit zur Navigation zwischen den Instanzen.
Deshalb sind Hin- und Rückrichtung immer getrennt dargestellt.
1
1..N
Assoziation: Die Pfeilrichtung gibt die Navigationsrichtung, also die
Richtung des möglichen Zugriffs an. An der Spitze und am Ende des
Pfeils können Kardinalit äten angegeben werden.
1..N
Aggregation: Stärkere Verbindung, denn das Aggregat übernimmt
besondere Aufgaben gegenüber den aggregierten Objekten. Auf der
Seite des Aggregats befindet sich die Raute. Die Navigationsrichtung
zeigt natürlicherweise in die Richtung der Komponenten.
1..N
Komposition: Eine Sonderform der Aggregation, die zum Ausdruck
bringen soll, daß die aggregierten Objekte feste Bestandteile des
Aggregats sind. Die ausgefüllte Raute wird auf der Seite der Komposition eingezeichnet, dort ist die Kardinalit ät implizit eins.
3.1.2 Darstellung der Interaktionsmuster
Als dynamische Struktur bezeichnet man die Interaktionen zwischen den Objekten zur Laufzeit und meint damit die Information, welche Methodenaufrufe
zwischen welchen Objekten wann ausgetauscht werden. Aus den Klassendiagrammen läßt sich diese Information nicht entnehmen, dort ist nur erkennbar,
daß die betreffende Klasse eine Methode für einen bestimmten Vorgang anbietet. Es fehlt hingegen jede zeitliche Gliederung. Betrachtet man im Klassendia-
AbstrakteKlasse
AbstrakteOperation ()
ImplementierungA
Operation ()
Instanzenvariable
ImplementierungB
Notiz, z.B. Pseudocode:
for ( ; ; ) {
ø a−>op ()
}
Abbildung 3.3: Klassendiagramm: Einfache Vererbung und abstrakte Basisklasse, die Notiz enthält Pseudocode, der die konkrete Operation erklärt [11].
48
KAPITEL 3. BASISENTWURF
gramm Assoziationen auf polymorphe Basisklassen, bleibt sogar verborgen,
welche Implementierung aus welcher Klasse die Aufgabe letztlich übernimmt.
Einige Operationen auf dem gesamten Gitter setzen sich aus komplizierten
Ketten von Methodenaufrufen auf verschiedenen Objekten zusammen, so z.B.
der Verfeinerungs- und Vergröberungsvorgang oder die Methodenauflösung im
numerischen Verfahren (vgl. Kap. 3.4, 3.5): Dort ist die Struktur des Zusammenwirkens der einzelnen Methodenaufrufe in Form eines Sequenzdiagramms
erklärt.
Sequenzdiagramme
Im Sequenzdiagramm (vgl. Abb. 3.4) nimmt die Ausführungszeit der Anwendung von oben nach unten zu, das Diagramm ist in dieser Richtung zu lesen.
Die Kopfzeile enthält ein Rechteck mit dem Klassennamen für jedes Objekt,
das zu Beginn der betrachteten Interaktion bereits besteht. Die gestrichelte
Lebenslinie des Objekts führt von dort aus bis zum Ende des Diagramms oder
bis zu der Stelle, an der das Objekt infolge der Interaktion gelöscht wird.
Die Lebenslinie neu erzeugter Objekte beginnt an der Stelle ihrer Instantiierung. Das Diagramm gibt die wechselseitige Beeinflussung von Instanzen wieder, weshalb Methodenaufrufe, die auf die eigene Lebenslinie führen, echt rekursiv sind: Sie betreffen das anfordernde Objekt selbst.
ObjektA
ObjektA
new ()
ObjektB
Operation ()
ObjektB
Laufzeit
Operation ()
...
Operation1 ()
Antwort
Operation2 ()
delete ()
...
...
Objektlebenslinie
Abbildung 3.4: Einfache Sequenzdiagramme: Konstruktion, Methodenaufruf und
Löschung von ObjektB ausgelöst durch ObjektA (links). Direkt-rekursive und
indirekt-rekursive Methodenaufrufe zwischen den Objekten (rechts) [11].
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
49
3.2 Datenstrukturen und Basisalgorithmen
Die Datenstruktur, die in einem numerischen Verfahren zur Lösung partieller
Differentialgleichungen zur Modellierung des unstrukturierten geometrischen
Gitters entworfen wird, nimmt insbesondere für die Erweiterung des numerischen Verfahrens auf verteilt-parallele Ausführung eine Schlüsselrolle ein.
Deshalb soll in den folgenden Abschnitten überlegt werden, wie eine derartige Datenstruktur auszusehen hat, die sich an den geometrischen Relationen
und dem verwendeten numerischen Verfahren orientiert.
Hinweis: Da Finite Volumen Verfahren (vgl. Kap. 1.2.1) nahezu keine Einschränkungen an die Geometrie der zu verwendenden Kontrollvolumen bedingen, sind einige Definitionen für allgemeine Polyederelemente formuliert. Jede
Numerierung von Objekten, Assoziationen usw. beginnt bei î und läuft bis ?ï¯
wenn die Gesamtzahl der vergebenen Nummern ist.
s
3.2.1 Übersicht
Der Strukturplan (vgl. Abb. 3.5) vermittelt einen ersten Überblick, wie das parallele Simulationsprogramm durch Vererbung, Ersatz und Delegation [12] aus ei-
Behälter
Test
Iteration
Test
Iteration
Zustand: Sicherung / Wiederherst.
Konstruktion
Konstruktion
Gitterweitenanpassung
Vererbung
Grobgitter (leer)
BuilderIF
Factory
ersetzt
da Zu
s gri
G ff
ro au
bg f
itt
er
Gitter (leer)
Zeitschritt
Daten: Sicherung / Wiederherst.
ersetzt
Test
Iteration
Konstruktion
Grobgitter (Eulergleichungen)
Factory
Gitter z.B. Eulerlöser, Parallel (leer), Eulerlöser − Parallel
Grobgitter (leer)
usw.
Abbildung 3.5: Strukturplan der Behälterklassen für das Grobgitter und der übergeordneten Klassen mit Methoden zu Iteration, Test, lokaler Gitterweitenanpassung und Sicherung bzw. Wiederherstellung.
50
KAPITEL 3. BASISENTWURF
nem sequentiellen (Mono-) Gitterentwurf mit leeren Elementen, Flächen, Kanten und Knoten, also einer Datenstruktur, die über die geometrische Information keine weiteren Daten oder Methoden beinhaltet, aufgebaut ist.
Zentral und von einheitlicher Gestalt ist das Iterationskonzept, welches die Verbindung von Durchläufen über die Grobgitterobjekte und deren aus der lokalen
Gitterweitenanpassung resultierenden Verfeinerungsbäumen ermöglicht (vgl.
Kap. 3.2.5, 5.7).
Auf diese Art können alle Methoden des Gitters bzw. des vom Gitter verwalteten Grobgitterbehälters, die lediglich auf die Iterationsschnittstellen der Elemente, Flächen, Kanten oder Knoten zugreifen, bereits an unterster Stelle realisiert werden. Dazu gehören die Methoden zur lokalen Gitterweitenanpassung,
zum Integritätstest und zur Sicherung bzw. Wiederherstellung der Verfeinerungsstruktur.
3.2.2 Darstellung der geometrischen Zusammenhänge
Das numerische Verfahren benötigt zwei Zugriffe, die längs der geometrischen
Relationen verlaufen: Volumenintegrale auf Elementen und Oberflächenintegrale auf den Element-Element-Grenzflächen verwenden die Koordinaten der
anliegenden Knoten.
2.
0.
3.
3.
3.
2.
1.
1.
2.
2.
0.
0.
0.
1.
1.
1.
ù(x,y,z)
Abbildung 3.6: Zusammenhang zwischen den Hexaedern, Vierecksflächen, Kanten und Knoten des Gitters. Der Zugriff auf die Koordinaten des Knotens erfolgt
indirekt über die anliegende Fläche und eine Kante (rot). Die offenen Pfeile geben
die globale Ausrichtung von Kanten und Flächen an.
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
51
Trotzdem werden mit Blick auf die anstehenden Erweiterungen hin zu einer
parallelen Gitterverwaltung alle geometrischen Zusammenhänge über die verschiedenen Dimensionen hinweg explizit vorgesehen: Das Gitter setzt sich somit zusammen aus Knoten, Kanten, Flächen und Elementen, womit gleichzeitig
eine Klassifikation der Iterationsschnittstellen nach der Dimension der Gitterobjekte vorgeschlagen wird (vgl. Abb. 3.6).
Deren Spezialisierung (Verfeinerung) [4] nach dem konkreten Typ eines Elements bzw. einer Fläche geschieht im Anschluß daran durch die Geometriesockelklassen (vgl. Kap. 3.3, Abb. 3.16):
Die Klasse der Elemente zerfällt dann in Hexaeder, Tetraeder usw., die der
Klasse der Flächen in Polygone verschiedener Polygonlänge. Durch die Navigation von einem Hexaeder zu einer Vierecksfläche bleibt das Niveau der
Spezialisierung erhalten.
Navigation zur niedrigeren Dimension
Die Relation zwischen zwei geometrischen Gitterobjekten ú und û der Form
ûêüäýú wird als Assoziation (vgl. Kap. 3.1.1) zwischen ú und û angelegt. Navigationsrichtung in dieser Assoziation ist immer die Richtung von der höheren
zur nächstniedrigeren Dimension, also von ú nach û . Allgemein zerfällt der Zugriff vom Element auf einen anliegenden Knoten in die Navigationskette (vgl.
Abb. 3.6)
Element
➝
Fläche
➝
Kante
➝
Knoten.
Diese Richtung der Navigation ist gewissermaßen natürlich: Der Zugriff auf ein
niederdimensionales Objekt, das Teil der Berandung ist, verfügt über die volle
geometrische Information zu diesem Objekt. Beispielsweise ist ausgehend vom
Hexaeder klar, daß alle Flächen der Berandung Vierecksflächen sein müssen,
die Umkehrung hingegen muß nicht richtig sein, denn eine Vierecksfläche kann
auch zu einer Pyramide oder einem Prisma gehören.
Orientierung
Weil Kanten und Flächen jetzt als eigenständige Gebilde angesehen werden,
sind sie auch absolut im Raum orientiert, worin ein ganz entscheidender Unterschied besteht zu einer unvollständigen Datenhaltung, bestehend aus Elementen und Knoten: Dort sind Kanten und Flächen implizit durch den verwendeten
Prototyp des Elements orientiert [32].
Daraus ergeben sich Freiheitsgrade, die anscheinend zunächst willkürlich festgelegt werden können, denn die Ausrichtung einer Kante oder einer Fläche
kann beim Aufbau des Gitters beliebig gewählt werden. Die Kante zwischen
zwei Knoten þÝÿ und þ º kann von þÝÿ nach þ º zeigen oder umgekehrt, die Fläche
52
KAPITEL 3. BASISENTWURF
der Knotenfolge þ ÿ k þA¬
º kann auf Arten in das Gitter eingesetzt werden
(alle zyklischen Permutationen der Mengen ÃîOFk¯ïñÄ und ïïñ¿FkîdÄ ).
Damit nun ausgehend vom Element die absolute Orientierung einer Außenfläche gegenüber derjenigen des Elementprototypen aufgelöst werden kann,
muß die Verdrehung (engl. twist) für jede assoziierte Fläche abgespeichert
werden. Dazu wird ein ganzzahliger Wert §)Ã_ï<8FkîOFkï®AÄ verwendet.
Der Zugriff auf den Knoten mit der Nummer im Elementprototyp wird dann als
Zugriff auf den Knoten der Fläche realisiert, wobei nach folgender Formel (
bezeichnet die Polygonlänge) zu berechnen ist:
y
y Û
Û
<ï Û
|
|
z
ñî
ñî
(3.1)
Allerdings ist der Zugriff auf den Knoten der Fläche, der hier vorausgesetzt
wird, auch nicht echt“ : Dahinter verbirgt sich noch eine Navigation über eine
”
der an der Fläche anliegenden Kanten. Die Situation ist hier ähnlich der bereits
geschilderten, aber erheblich einfacher:
Es gibt nur zwei Möglichkeiten, eine Kante zwischen zwei Knoten auszurichten, die als Orientierung §gÃîOFÄ zu jeder Assoziation Fläche ➝ Kante abgespeichert wird. Dazu kommt noch die Konvention, als Kante mit der Nummer
Â
ausgehend von der Fläche die Kante zwischen den Knoten mit den lokalen
Â
Â
Nummern und y Û |
zu bezeichnen.
Die Skizze zeigt die atomare Situation beim Zugriff auf den Knoten mit der lokalen Nummer î der rechten Elementfläche (vgl. Abb. 3.6): Der entsprechende
Knoten hat in der Numerierung der Fläche die Nummer , er kann als Knoten
der Kante erreicht werden.
Globale Ausrichtung
Als globale Ausrichtung einer Kante oder Fläche im Gitter wird deren Lage
bezüglich der anliegenden Knoten bezeichnet. Falls die Knoten über eindeutige
globale Nummern verfügen, kann zunächst die folgende Definition angewendet
werden, um die globale Ausrichtung zu beschreiben.
 Í
 Í
Definition: Sei eine Kante zwischen den Knoten . Dann wird mit y |
Í Â
Â
Í
Â
Í
oder y | identifiziert. Für die Ausrichtung findet man die Fälle bzw.
(aufwärts/abwärts). Die Situation ist für Flächen ähnlich: Die Lage einer Fläche
kann im einfachsten Fall durch den Vektor der anliegenden Knotennummern in
der Reihenfolge der lokalen Numerierung beschrieben werden.
An dieser Stelle wird nun festgelegt, wie mit dem zusätzlichen Freiheitsgrad,
der durch die freie Wahlmöglichkeit der globalen Ausrichtung der Flächen und
Kanten entstanden ist und dort bisher offenbar nicht benötigt wird, beim Aufbau
des Grobgitters umzugehen ist. Anstelle einer beliebigen (zufälligen) globalen
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
53
Ausrichtung, die z.B. von der Reihenfolge der Konstruktion abhängt, wird gefordert, daß:
- Alle Knoten des Grobgitters a-priori numeriert sind oder in der Reihenfolge ihrer Konstruktion numeriert werden.
- Für alle Kanten des Grobgitters der îd lokale Knoten die kleinere globale
Nummer trägt.
- Für alle Flächen (mit anliegenden Knoten) des Grobgitters der lokale îd Knoten an der kleinsten globalen Nummer anliegt und die globale
Nummer des ¿ Knotens kleiner als die des ,ïñ¿ Knotens ist.
Die Ausrichtungskonvention für die Flächen ist leichter zu verstehen, wenn beachtet wird, daß jede Fläche bildlich gesprochen zuerst mit ihrem îO lokalen
Polygonpunkt am Knoten mit der kleinsten globalen Nummer fixiert wird. Dann
wird je nach Situation der Umlaufsinn der Fläche festgelegt, also ob sie vom
Betrachter aus links- oder rechtsdrehend numeriert ist.
3.2.3 Das geometrische Nachbarschaftskonzept
Die Strukturen, die im vorigen Abschnitt zur Modellierung der geometrischen
Zusammenhänge vorgeschlagen werden, sind ihrer Konstruktion nach nicht in
der Lage, die Navigation von einer Element-Element-Grenzfläche zurück auf
die anliegenden Elemente zu vermitteln (Nachbarschaft).
Das Finite Volumen Verfahren (1.13) benötigt definitionsgemäß zur Berechnung der numerischen Flüsse auf allen Flächen · Ê des Gitters die auf den
Elementrand fortgesetzten Werte der Erhaltungsgrößen · aus dem Element
(Kontrollvolumen) · .
Der Entwurf wird deshalb um das geometrische Nachbarschaftskonzept
ergänzt, das den folgenden Voraussetzungen genügen wird:
r
r
Innerhalb des Grobgitters wird eine konforme Nachbarschaft vorausgesetzt: Jede Außenfläche eines Grobgitterelements fällt mit genau einer
Außenfläche eines Nachbarelements zusammen.
Nach einer lokalen Verfeinerung darf eine nichtkonforme Nachbarschaft
der folgenden Art entstehen: Die Außenfläche eines Elements fällt mit
genau einer Fläche zusammen, die durch ein- oder mehrmalige Verfeinerung aus derjenigen Außenfläche des groben Elements entstanden ist,
zu dem eine konforme Nachbarschaft bestand (vgl. Abb. 3.11)
Darstellung der konformen Nachbarschaft
Die Darstellung des Nachbarschaftskonzepts in Form der entsprechenden
Klassen soll am Beispiel der konformen Nachbarschaft zwischen Hexaeder-
54
KAPITEL 3. BASISENTWURF
element und Pyramide über die gemeinsame Vierecksfläche motiviert werden
(vgl. Abb. 3.7): Die Navigation von einem Element über die anliegende Fläche
zum Nachbarelement muß unabhängig von dessen konkretem geometrischen
Typ ablaufen.
Von den bisher eingeführten Klassen könnte als Ziel für eine Assoziation bestenfalls die Iterationsschnittstelle des Elements eingesetzt werden, d.h. beim
Zugriff auf den Nachbarn geht über die Kenntnis, daß es sich um ein Element
handelt, sämtliche Information verloren. Dadurch wird die Navigationsmöglichkeit aber praktisch wertlos.
Beachtet man hier, daß die beste Aussage, die über den Nachbarn gemacht
werden kann, besagt, er verfüge über mindestens eine Vierecksfläche (im Beispiel), dann wird klar, wie durch eine passende Schnittstelle die beschrieben
Probleme beseitigt werden (vgl. Abb. 3.7): Die Geometriesockelklassen des
Elements und des Randelements beerben eine Schnittstelle (im Beispiel den
4-PolygonVerbinder), die spezifiziert, welche Operationen ausgehend von der
anliegenden Fläche angefordert werden können, und zwar gegliedert nach
dem konkreten geometrischen Typ der Fläche.
Durch die Aufnahme dieser Schnittstelle wird (im Beispiel) vom geometrischen
Typ Hexaeder, Pyramide der Fläche 4-Polygon gegenüber die Eigenschaft zugesichert, über mindestens eine Vierecksfläche zu verfügen. Der Hintergrund
für diese Strukturierung der Schnittstellen ist direkt im eingesetzten numerischen Verfahren zu erkennen: Hier wird die Restriktion der (polynomialen) Approximation der Daten innerhalb des Elements auf eine entsprechende lokale
Darstellung auf der Randfläche verlangt (vgl. Kap. 3.4.1).
2
4−PolygonVerbinder
Hexaeder
0,1,2
0,1,2
6
Pyramide
1
4−Polygon
1
Abbildung 3.7: Konforme Nachbarschaftsbeziehung zwischen Element, Vierecksfläche und Pyramide (unten) und deren Darstellung im Entwurf. Die Navigation vom Element zum Nachbarelement verläuft über die anliegende Fläche zur
Schnittstelle der 4-Polygonnachbarschaft (rot).
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
55
Aber auch unter grundlegenden Aspekten ist die vorgeschlagene Art der Nachbarschaftsbeziehung eine absolut angemessene Lösung, denn sie vermittelt
durch die Typinformation, die mit der Assoziation auf die beschriebene Schnittstelle verbunden ist, die maximal verfügbare geometrische Information zu der
realen Situation im Gitter.
Hinweis: Der Navigationspfad der geometrischen Nachbarschaftsbeziehung
vermittelt zwar den Zugriff von der Fläche auf das anliegende Element unter
angenehmen abstrakten Spezifikationen, allerdings bleibt offen, wie das Element feststellen kann, von welcher Außenfläche ein Methodenaufruf erfolgt. Eine einfache Möglichkeit besteht darin, mit dem Methodenaufruf an die Schnittstelle auch gleichzeitig die lokale Flächennummer im Element als Parameter
zu übergeben (vgl. Abb. 3.8), die dazu in der Datenstruktur der an dieser Seite
anliegenden Fläche abgespeichert sein muß.
Daraus folgen zwei Nachteile: Einerseits werden die Signaturen aller Schnittstellenmethoden zur Nachbarschaft um ein Argument aufgebläht, andererseits
sichert eine konsistente Datenstruktur noch keine korrekten Aufrufe, falls die
Konstruktion nicht richtig verstanden wird.
Ein aufwendiger Weg, der das Problem vollständig umgeht, ist im nächsten
Klassendiagramm (vgl. Abb. 3.9) dargestellt: Das Hexaederelement enthält Instanzen von sechs Klassen, die für jede Position die Schnittstelle implementieren.
Die Instanzen dieser sechs Klassen bilden zusammen mit dem Hexaeder eine
Komposition (vgl. Kap. 3.1.1), wobei der Zugriff auf das Hexaederelement für
jede Methode der Komponenten gewährleistet sein muß. Dazu ist jede Schnittstellenmethode für jede Position einzeln zu implementieren. Der entscheidende Vorteil liegt aber darin, daß die Positionsangabe schon im Navigationspfad
(also in der Referenz) enthalten ist.
2
4−PolygonVerbinder
Operation (Fläche : Int)
Hexaeder
1,2
Operation (Fläche : Int)
6
4−Polygon
1
switch ( Position ) {
case OBEN :
...
case UNTEN:
.
.
ø break ;
}
FlächeLinks : int
FlächeRechts : int
Abbildung 3.8: Einfachste Lösung zur Vermittlung der Position der von einem
Methodenaufruf betroffenen Fläche des Hexaederelements: Die lokale Flächennummer wird bei jedem Methodenaufruf als zusätzlicher Parameter angegeben.
56
KAPITEL 3. BASISENTWURF
Eine andere Lösung verwendet für jede Position eine Instanz, wobei alle von
der selben Klasse sind (vgl. Abb. 3.10). Die Positionskodierung findet durch
ein Attribut statt, hier durch die lokale Flächennummer. Die Schnittstellenmethoden müssen in diesem Fall nur einmal realisiert werden, die Auswahl des
passenden Algorithmus folgt dann dem Wert des vorgefundenen Attributs. s
Erweiterung auf die nichtkonforme Nachbarschaft
Das numerische Verfahren verwendet in der niedrigsten Ordnung elementweise konstanten Approximationen für die Erhaltungsgrößen und erfordert somit
keine komplizierte, vom geometrischen Typ der Fläche abhängige Darstellung
der Daten auf dem Elementrand (vgl. Kap. 3.4.1).
2
4−PolygonVerbinder
Operation ()
1
Rechts
Links
Unten
Oben
Vorne
Hinten
Operation ()
1
hexaeder−>Operation (LINKS) ;
1
Hexaeder
1
Operation (Position : Int)
6
1,2
4−Polygon
1
Abbildung 3.9: Kodierung der lokalen Flächenposition im Element durch eigene Klassen, die von der Schnittstelle zur 4-Polygonnachbarschaft abgeleitet sind
(aufwendige und sichere Lösung).
2
4−PolygonVerbinder
6
Flächenverbinder
Position : enum
6
1
Hexaeder
1
6
4
4−Polygon
1
Abbildung 3.10: Vereinfachte Lösung: Es wird nur eine einzige Spezialisierung
der Schnittstelle zur 4-Polygonnachbarschaft benötigt. Die Information zu welcher Position die jeweilige Instanz gehört, wird in einem Attribut abgelegt.
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
57
Für diesen Spezialfall kann das konforme Nachbarschaftskonzept sehr einfach
auf die zulässigen nichtkonformen Situationen erweitert werden: Die Assoziation führt direkt von der feinen Fläche zum 4-Polygonverbinder des groben
Nachbarelements (vgl. Abb. 3.11) und enthält keine differenzierte Darstellung
der Einbettung der feinen Fläche in die grobe des Nachbarn.
Der Nachteil dieses Vorgehens besteht darin, daß die vorgestellte Art offensichtlich nur in einem Gitter mit Flächen von einheitlichem geometrischen Typ
eingesetzt werden kann. Der Grund ist der direkte Zugriffspfad von der feinen
Vierecksfläche zurück auf das grobe anliegende Element: Falls ein Hexaeder
in Elemente mit Dreiecksflächen zerfällt (z.B. in Prismen), findet diese Assoziation keine geeignete Schnittstelle mehr vor - der Hexaeder beerbt (vernünftigerweise) keine Schnittstelle für eine 3-Polygonnachbarschaft. Weiterhin fehlt
in diesem Fall auch im homogenen Hexaedernetz die für numerische Verfahren höherer Ordnung notwendige Information, wie die Daten aus dem groben
Element auf die anliegende feine Fläche fortzusetzen sind.
Als Lösung empfiehlt sich hier, die Assoziation von der Fläche auf ein Proxyobjekt [12] (als Fläche mit angehängter Kugel dargestellt) zu führen, das die
passende Schnittstelle für die Nachbarschaft implementiert und mit der nötigen Information ausgestattet ist, wie die Fläche des feinen Elements in die
Vierecksfläche des groben eingebettet ist. Damit kann gleichzeitig eine Interpolation der Daten im numerischen Verfahren verbunden werden.
3.2.4 Behandlung der Gebietsränder
Definition: Eine Fläche des Gitters liegt auf dem Gebietsrand, falls sie von
genau einem Element über den Navigationspfad des geometrischen Zusammenhangs (vgl. Kap. 3.2.2) erreicht wird. Eine Kante oder ein Knoten liegt auf
dem Gebietsrand, wenn mindestens ein Navigationspfad ausgehend von einer
Fläche auf dem Gebietsrand dort endet.
2
3
1
0
Abbildung 3.11: Nichtkonforme Nachbarschaft nach der lokalen Verfeinerung des
linken Elements mit direkter Navigation zum Nachbarelement (links) oder dem
Zugriff unter Vermittlung eines Proxyobjekts (rechts).
58
KAPITEL 3. BASISENTWURF
Am Gebietsrand sollte die Situation aus bisheriger Sicht unproblematisch sein,
trotzdem lohnt sich ein genauer Vergleich der zur Verfügung stehenden Alternativen:
r
r
Die Eigenschaft auf dem Rand zu liegen“ könnte direkt in die Klasse für
”
die betreffenden Knoten, Kanten und Flächen eingebaut werden (polymorphes Verhalten). Für das Element ergibt sich keine Veränderung, es
befindet sich definitionsgemäß immer im Innern des Gebiets. Bei diesem
Vorgehen ist eine Kenntnis der Gebietsränder schon beim Aufbau des
Grobgitters nötig, damit die richtigen“ Flächen eingebaut werden.
”
Am Rand wird auf jede Fläche des Gitters ein Randelement aufgeklebt (vgl. Abb. 3.12). Die auf dem Rand liegenden Knoten, Kanten und
Flächen sind mit denen im Innern des Gitters vom Typ identisch. Jetzt
muß aber ein abweichendes Verhalten der randständigen Flächen im numerischen Verfahren oder während der lokalen Gitterweitenanpassung
durch eine Vermittlung des anliegenden Randelements und eine angepaßte Methodenauflösung erreicht werden (vgl. Kap. 3.4.4).
Die erste Möglichkeit erscheint zunächst einfacher, aber aus Gründen, die mit
der Erweiterung des Basisentwurfs auf ein verteiltes Gitter zusammenhängen,
wird die zweite realisiert: Die dynamische Umverteilung des Gitters im verteilten parallelen Programm wird an beliebigen nichtvorhersagbaren Stellen im
Gitter künstliche Randflächen erzeugen oder auch schließen, was mit dem ersten Ansatz offenbar nicht beherrscht werden kann.
2
4−PolygonVerbinder
Hexaeder
1,2
0,1
6
4−PolygonRand
1
4−Polygon
1
Abbildung 3.12: Konforme Nachbarschaftsbeziehung zwischen Element, Vierecksfläche und Vierecksrandelement.
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
59
3.2.5 Verfeinerungsregeln und hierarchische Anordnung
Die Hierarchie entsteht in einem Gitter durch die lokale Gitterweitenanpassung und ist neben den geometrischen Zusammenhängen die zweite wichtige
Struktur. Obwohl das numerische Verfahren keine hierarchische Datenhaltung
erfordert, wird auch für die Abbildung der Hierarchie eine sorgfältige Modellierung vorgenommen: Der Abschnitt zur verteilten Datenhaltung zeigt im nachfolgenden Kapitel, welcher Gewinn aus einer günstig angelegten hierarchischen
Strukturierung gezogen werden kann (vgl. Kap. 4.1.1, 4.4.5, 4.5.2).
Mit Verweis auf die Bedürfnisse der parallelen Gitterverwaltung wird die folgende Struktur der hierarchischen Navigationswege für das Gitter hier ohne
weitere Begründungen festgelegt (vgl. Abb. 3.13). Jedes in der Folge einer
Verfeinerung neu entstandene Objekt soll dabei am Ort seiner Entstehung verwaltet werden, der Navigationspfad soll entlang der Generationen verlaufen:
r
r
Aus den Knoten des Gitters entstehen keine neuen Gitterobjekte.
r
Die Teilung einer Kante liefert neue Kanten und Knoten, diese sind
ausgehend von der Bezugskante angeordnet. Die entstehenden Knoten
müssen auf der Bezugskante liegen.
r
Verfeinerung einer Fläche führt zu neuen Flächen, Kanten und Knoten,
die relativ zur Bezugsfläche aufgefunden werden können. Der neu entstehende Knoten liegt in der Bezugsfläche.
Durch die Teilung eines Elements werden neue Elemente, Flächen, Kanten und Knoten erzeugt, die vom Bezugselement aus erreichbar sind. Der
entstehende Knoten liegt innerhalb des Bezugselements.
Abbildung 3.13: Hierarchische Anordnung der Objekte des Gitters am Ort ihrer
Entstehung: Das Hexaederelement (außen) wird zum Knoten in der Elementhierarchie und verwaltet die enthaltenen zwölf Flächen, sechs Kanten und den zentralen Knoten. Analoge Situation an der Vierecksfläche und an der Kante.
60
KAPITEL 3. BASISENTWURF
Die Navigationsmöglichkeiten innerhalb der hierarchischen Struktur sind in der
Skizze ausgehend von einem Hexaederelement mit einer isotropen Verfeinerungsstufe dargestellt (vgl. Abb. 3.14). Die Navigationsrichtung verläuft in der
Zeichnung im Baum von unten nach oben. Gestrichelte Linien sind eingetragen, falls sich das Muster bei mehrfacher Verfeinerung wiederholt.
Durch diese Art der Datenhaltung wird die Iteration der Knoten, Kanten und
Flächen, die Blätter in der entsprechenden Hierarchie sind, deutlich komplizierter, denn es gibt keine Behälter [1, 27], die exklusiv diese Objekte verwalten.
Dem wird in der Implementierung durch ein geeignetes Paket mit Bausteinen
für Iterationsklassen begegnet (vgl. Kap. 5.7).
3.2.6 Grobgitteraufbau
Die kooperative Struktur des verteilt parallelen Programms weist dem Modul
zum Aufbau des Grobgitters eine besondere Bedeutung zu (vgl. Kap. 4.1.2):
Dieses Modul wird an mehreren Stellen des Basisentwurfs als auch von der
verteilten Gitterverwaltung verwendet und führt sowohl den Aufbau des Grobgitters nach einem in einer Datei gespeicherten Zustand durch, als auch die
Ergänzung und den komponentenweisen Umbau des Grobgitters im Verlauf
der dynamischen Lastverteilung.
Elemente
Flächen
Kanten
Knoten
Abbildung 3.14: Hierarchische Datenhaltung für die verschiedenen Teilbäume, die
durch Verfeinerung eines Hexaederelements entstanden sind. Die Navigationsrichtung verläuft von unten nach oben.
3.2. DATENSTRUKTUREN UND BASISALGORITHMEN
61
Entwurfsmuster
Wann immer das Grobgitter verändert werden muß, spielen im wesentlichen
drei fundamentale Bausteine zusammen, wobei das Entwurfsmuster das Standardmuster einer abstrakten Objektfabrik mit dem des Erbauers, virtuellen Konstruktors [12] verbindet (vgl. Abb. 3.15).
r
Das konkrete Gitter instantiiert einen Grobgitterbehälter [2] und vorübergehend einen geeigneten Erbauer für das zu erstellende Gitter (Director
[12]).
r
Der Erbauer des Grobgitters setzt das Grobgitter aus Knoten, Kanten,
Flächen, Elementen und Randelementen sukzessive zusammen. Die
konkreten Typen der in das Grobgitter eingebauten Objekte sind dem
Erbauer nicht bekannt, er delegiert die Instantiierung an den Grobgitterbehälter (Objektfabrik).
r
Das konkrete Grobgitter tritt gegenüber dem Erbauer als Schnittstelle zur
Konstruktion der geometrischen Gitterobjekte auf und ist darüber hinaus
ein konkreter Behälter, der die Bestandteile des Grobgitters verwaltet.
Gitter (Interface)
Konkretes Gitter (Director)
Instantiierung
1
mg : Konkretes Grobgitter &
Analoge Situation für Ränder,
Flächen, Kanten und Knoten
Instantiierung
Erbauer (Builder)
Map < Hexaeder * > a
Map < 4−Polygon * > b
Map < Kante * > c
Map < Knoten * > d
1
1
1...N
Grobgitter (Project)
0...N
HexaederGeometriesockel (Part)
f : (FlächeGeometriesockel *)[6]
hexaederErzeugen ()
4−PolygonErzeugen ()
kanteErzeugen ()
knotenErzeugen ()
Behälter < Hexaeder * > a
Behälter < 4−Polygon * > b
Behälter < Kante * > c
Behälter < Knoten * > d
Konkretes Hexaederelement
Instantiierung
1
Konkretes Grobgitter (Factory)
hexaederErzeugen ()
4−PolygonErzeugen ()
kanteErzeugen ()
knotenErzeugen ()
Abbildung 3.15: Das Zusammenwirken der verschiedenen Instanzen beim Aufbau
des Grobgitters entspricht dem Standardentwurfsmuster Builder Pattern [12].
62
KAPITEL 3. BASISENTWURF
Hinweis: Die Behälter unterscheiden nach dem geometrischen Typ der enthaltenen Objekte, d.h. die Typinformation bleibt auf dem Niveau der Geometriesockelklassen erhalten. Die gegenüber dem Gitter angebotene Funktionalität
der Iteration über die Iterationsschnittstellen (ohne geometrische Information)
wird durch eine zusammengesetzte Iteration über die verschiedenen geomes
trischen Ausprägungen erreicht.
3.3 Gliederung der Klassen und Schnittstellen
Aus der Zusammenführung aller Konzepte, denen das Gitter in Bezug auf Geometrie, Nachbarschaft und Hierarchie genügt, folgt eine Gliederung der entworfenen Klassen und Schnittstellen (vgl. Abb. 3.16):
3.3.1 Iterationsschnittstellen
Die Übersicht enthält links die Schnittstellen für die Iteration, geordnet nach der
Dimension der dahinter verborgenen geometrischen Gitterobjekte. Die Iterationsschnittstellen dürfen daher nicht nach konkretem geometrischen Typ unterscheiden, und die enthaltenen abstrakten Methodendeklarationen spezifizieren
Operationen, die für alle Elemente sinngemäß gleichartig sind.
Die Randelemente besitzen eine eigene Iterationsschnittstelle und können
deshalb nicht zusammen mit Flächen oder Elementen iteriert werden. Dies
ist durchaus sinnvoll, denn die Randelemente sind als eigenständige Gitterbestandteile anzusehen, die sich unter Verfeinerungsoperationen wie Flächen,
unter Nachbarschaftszugriffen aber eher wie Elemente verhalten. Der Satz der
Iterationsschnittstellen ist vollständig.
3.3.2 Geometriesockelklassen
Die Geometriesockelklassen der Elemente (hier Hexaeder) und der Randelemente (hier 4-PolygonRand) spezialisieren die allgemeinen Iterationsschnittstellen sowie die Schnittstelle für die Nachbarschaftsrelation und sind die Basisklasse für weitere Ableitungen mit Implementierungen eines numerischen
Verfahrens, weil dieses in der Regel stark vom Typ der unterliegenden Elemente abhängig ist. Beispielsweise sind zur Volumenberechnung für Hexaeder
und Tetraeder unterschiedliche Formeln zu implementieren.
Die Geometriesockelklassen sind die Stelle des statischen Entwurfs, an der
sich die Zugehörigkeit eines Elements zu einem bestimmten geometrischen
Typ manifestiert. Deshalb sind hier auch alle Methoden untergebracht, die eine Navigation entlang der geometrischen Zusammenhänge und der Nachbarschaftsbeziehungen vermitteln (vgl. Kap. 5.1.1, Abb. 5.1-5.4).
3.3. GLIEDERUNG DER KLASSEN UND SCHNITTSTELLEN
63
Ferner kann für die Elemente hier die Verfeinerungsanforderung stattfinden.
Die Schnittstelle zur Nachbarschaft (hier 4-PolygonVerbinder) beerbt keine Iterationsschnittstelle und wird daher nur im Zuge der Navigation in der Nachbarschaft erreicht.
Die Geometriesockelklassen bilden einen vollständigen Satz, solange keine
weiteren Elementtypen in das Konzept eingefügt werden müssen.
3.3.3 Implementierungsschicht
Ganz rechts in der Tabelle sind die für das numerische Verfahren vorgesehenen konkreten Implementierungsklassen eingetragen (vgl. Abb. 3.16).
Auf den Knoten und Kanten benötigt das numerische Verfahren keine Operationen die über den Umfang der Funktionalität aus den Geometriesockelklassen
hinausgehen, daher werden deren leere“ Standardimplementierungen, die mit
”
dem Funktionsinhalt der Geometriesockelklassen übereinstimmen, verwendet.
Die Implementierungen der Randelemente bestimmen das Verhalten der Außenflächen des Gitters im numerischen Verfahren.
Neue Implementierungsklassen müssen erstellt werden, sobald ein abgeändertes numerisches Verfahren in das Gitter eingebaut werden soll.
Iteration
Knoten
Fläche
Element
Rand
Nachbarschaftskonzept
Navigation
Kante
4-PolygonFl äche
Hexaeder
Vierecksfl äche mit
Berechnung der num. Flüsse
Hexader mit Verwalt ung
des Erhaltungsvekto rs
4-PolygonVerbinder
4-PolygonRand
Geometriesockelklassen
Verschiedene Rand−
behandlungen
Implementierungen
Vererbung / Spezial isierung
Abbildung 3.16: Die Klassen- und Schnittstellenhierarchie der Gitterobjekte für
das Simulationsprogramm in der Übersicht. Die Dimension nimmt von oben nach
unten, die Spezialisierung von links nach rechts zu.
64
KAPITEL 3. BASISENTWURF
3.4 Numerisches Verfahren
Die mathematischen Inhalte des numerischen Verfahrens zur Simulation kompressibler Strömungen auf einem unstrukturierten Hexaedernetz sind im Kapitel zu den Grundlagen des numerischen Verfahrens (vgl. Kap. 1) detailliert
beschrieben.
An dieser Stelle soll geklärt werden, wie das numerische Verfahren in das vorgeschlagene Gitterkonzept zu integrieren ist und wie der Daten- und Methodeninhalt der Flächen, Elemente und des Gitters aussehen soll.
3.4.1 Interpolationsobjekte
In den Ausdruck der numerischen Flußfunktion werden im Fall niedrigster
Approximationsordnung die Werte aus den an der Bezugsfläche ! anliegenden Volumen "# , "$ direkt eingesetzt und zur Integration auf der Fläche wird
eine 1-Punkt Integrationsformel verwendet (vgl. Kap. 1.2.2):
%&('!)
% &
% & % &
,/2 .10 254 65798 ;: =
< ?
>A@
*+
"3
(3.2)
Dieses Schema berücksichtigt weder, daß der numerische Fluß auch von der
Normalen B abhängt [34], die nicht unbedingt konstant auf der betrachteten
Fläche sein muß, noch sieht es eine Möglichkeit zur Erweiterung des Verfahrens auf eine höhere Approximationsordnung vor.
Ein Finite Volumen Verfahren mit höherer Approximationsordnung wiederum
verwendet zellenweise Approximationen der Lösung durch lineare Funktionen
[42] oder Polynome höheren Grades [8], wobei die numerische Lösung auch
hier auf den Zellgrenzen unstetig sein kann:
%
:DCEGF > *+
%
H:IC >
falls
CJEK"# @
(3.3)
In diesem Fall ist (3.2) durch den exakten Ausdruck
% &5'!)
% &
,
1
*+
% & 6P78 % & 6P78
2 .10 2 4 6 78ML 6 7 8O
2 N 2 P:IBQ < 2 < 2 >SRT
" B 2
(3.4)
2QU )
zu ersetzen, wobei der Faktor B auftritt, weil die Definition der numerischen Flußfunktion aus dem Verfahren niedrigster Ordnung bereits die mit dem
Maß der Fläche skalierte Normale enthält (1.15) [34]. In (3.4) bezeichnet
% & 2 6 7 8
* !WVYXSZ
(3.5)
die Fortsetzung der (polynomialen) Approximation der numerischen Lösung
aus dem Zeitschritt [ auf die Randfläche !]\_^`"# des Volumens "# , die mit
%
der globalen Approximation * FaVYX Z auf die folgende Art zusammenhängt:
b
CcEKQ
*
% & 2 65798
%
%
:DC > e
+ j dgfikmh l :IConqpsrtB!;:IC >u>vgwt+ x wzy j{gd fi|
k h l }:IC~nprBQP:IC >u>A@
3.4. NUMERISCHES VERFAHREN
65
Damit das Integral (3.4) numerisch berechnet werden kann, sind zunächst für
die Größen BQ und (3.5) Parameterdarstellungen einzusetzen. Seien dazu F
ein geeignetes Parametergebiet und
F
* \aXS
1VYQ <
b
E F
P:
>
* C: > +
(3.6)
eine Parameterdarstellung der Fläche ! dann ist
b
B Q * Fa
VYX w <
EF
* B : > *+ B Q :IC: >u> + B Q : Q : H> >
die Darstellung der Flächennormalen auf dem Parametergebiet F
transformierten Größen (3.5) werden nachfolgend abgekürzt durch
* F
VXZ <
b
EJF
und die
% & 2 6 7 8
% & 2 6 7 8
D: C: >H> +
: ;: >u>
* QP: > *Q+
bezeichnet. Für das numerische Verfahren wird die Einschränkung der Darstellung der Lösungsfunktion auf die Fläche benötigt, wozu die Interpolationsobjekte in den Entwurf eingeführt werden (vgl. Abb. 3.17):
Definition: Das Interpolationsobjekt auf dem Volumen " zur Fläche
Q\^`"# stellt die Fortsetzung der numerischen Approximation der Lösung
auf die Fläche Q (3.5) in den Koordinaten der Flächenparametrisierung (3.6)
dar.
Wird beispielsweise wird für eine Vierecksfläche im Hexaedernetz eine Referenzabbildung S * , N < N
V
! verwendet, dann enthält das Interpolationsobjekt eine Abbildung der Form:
Q
* , N < N
VYX Z @
(3.7)
Der mathematische Sachverhalt wird auf die vorgeschlagene Art sehr präzise
im Programmentwurf wiedergegeben. Ein Vorteil besteht auch darin, daß jederzeit auf Integrationsformeln beliebiger Ordnung übergegangen werden kann
und daß der konkrete geometrische Typ der Elemente zur Berechnung der numerischen Flüsse nicht benötigt wird.
3.4.2 Integrationsformeln
Nach der Transformation von (3.4) auf das Parametergebiet der Darstellung der
betreffenden Fläche kann der resultierende Ausdruck mit dem Oberflächenintegral durch eine numerische Integrationsformel auf dem Parametergebiet F in
der gewünschten Genauigkeit berechnet werden [35]:
% & 6 7 8 % & 6 97 8
L 6P78 :IB < 2 < 2 > 2 N 2 RT + L? Q
B
4# Q: BQ P:
> < ;:
2 2
T : >2
: B : >< Q : > < H : u> > 2
R
B !
(3.8)
E F @
>A< H: H> >
66
KAPITEL 3. BASISENTWURF
Dieser Ausdruck läßt sich für ein Verfahren mit elementweise konstanten Wer
ten vereinfachen, weil in diesem Fall die Darstellungen Q bzw H konstant
sind, und es folgt bei festgehaltenem Normalenvektor
Q :
% %
: A> < H : H> > + : < >
b?
EF @
Da die Flußfunktion von Steger und Warming [34] von der Form
% %
% %
Q;:B! < < > + {: < > rBQ
ist, und tatsächlich von der Flächennormalen B! an ! nicht abhängt, gilt:
(3.8) +
% %
: < > r14 9¡ )
B @
(3.9)
Hier sind die Referenzabbildungen des Einheitswürfels auf die Hexaedervolumen durch trilineare Polynome beschrieben. Daraus ergibt sich die Referenz
abbildung : > des Einheitsquadrats auf eine Vierecksfläche als bilineares
Polynom. Bezeichne ¢ )£ £ £ ¤ EF die Eckpunkte der Fläche ! , findet man:
w
:¥ ) ¥
<
>
¦N : N , ¥ ) > : N , ¥ > ¢ ) n
N : , ¥ ) > : nG¥ > ¢ n
¦
N
N
w
+
n
¦ N : N nK¥ ) > : N , ¥ > ¢
s
N : nK¥ ) > : nG¥ > ¢ ¤ @
¦s
N
N
Die Normale an diese Fläche B!;:D§ > ist eine lineare Funktion in
Linkes und rechtes Interpolationsobjekt
+
(3.10)
:9¥ ) < ¥ > T .
Gij (Di (pk), D j (p k))
Integration der Flußfunktion
Flußfunktion
G (p : Real [2]) : Vec5
p0 , ..., pn−1
Flußfunktion
IntegrationsformelQuadrat
integralOrdnung1 () : A :: val_t
integralOrdnung2 () : A :: val_t
...
2
Interpolation
operator () (p : Real [2]) : Vec5
Schnittstelle der Interpolationsobjekte
InterpolationOrdnung0
InterpolationOrdnung1
operator () (p : Real [2]) : Vec5
operator () (p : Real [2]) : Vec5
Verschiedene Implementierungen der Interpolationsobjekte
Dl (p)
Di , Dj
Abbildung 3.17: Zusammenspiel von Integrationsformeln, Funktionenobjekten
zur Flußberechnung und den zwei Interpolationsobjekten zur Berechnung der numerischen Flußfunktion auf einer Fläche.
3.4. NUMERISCHES VERFAHREN
67
Eine Integrationsformel erster Ordnung liefert dann das exakte Integral:
(3.9) +
% %
: < > rtB <
+
:¨ < ¨ > T @
Nachdem die Bausteine des Entwurfs für das numerische Verfahren vorgestellt
sind, soll noch darauf eingegangen werden, wie die Komponenten zusammenwirken, um das gewünschte Ergebnis zu erzielen.
3.4.3 Zusammenspiel der Komponenten
Die Klassendiagramme (vgl. Abb. 3.17, 3.18) zeigen schematisch, wie die
Komponenten Integrationsformel, Interpolationsobjekt und eine Klasse für die
numerische Flußfunktion zusammenwirken.
In den beiden beteiligten Elementen "# , "$ links und rechts der Bezugsfläche
Q werden die Interpolationsobjekte der entsprechenden Ordnung für das Parametergebiet , N < N
instantiiert und als Referenz auf die polymorphe Schnittstellen Interpolation dem Funktionsobjekt Flußfunktion bekannt gemacht. Dieses wiederum wird von der Integrationsformel verwendet, um die Werte der numerischen Flußfunktion an den verschiedenen Integrationsstützstellen zu berechnen.
Das Ergebnis der Integration ist ein Datum vom Typ des Erhaltungsvektors,
welches den beiden Elementen zur Verfügung gestellt werden muß, damit dort
die neue Lösungsfunktion nach Abschluß des Zeitschritts bestimmt werden
kann (vgl. Kap. 1.3).
0...N
GitterEulerImplementierung
Fläche
flußBerechnen (zeit:Real) : Vec5
Nachbar
2
4−PolygonVerbinder
4-PolygonEulerImplementierung
flußBerechnen (e : 4-Polygonverbinder *,
f : 4-Polygon *, zeit : Real) : Vec5
flußBerechnen (d : Interpolation,
f :4-Polygon *, zeit : Real) : Vec5
flußBerechnenRand (e : 4-Polygonverbinder *)
flußBerechnenRand (d : Interpolation)
flußBerechnen () : Vec5
flußBerechnen (links : Interpolation &,
rechts : Interpolation&, zeit : Real) : Vec5
1
6
Außenflächen
HexaederEulerImplementierung
4−PolygonRandImplementierungEuler
flußBerechnen (e : 4-Polygonverbinder *,
f : 4-Polygon *, zeit : Real) : Vec5
flußBerechnen (d : Interpolation &,
f : 4-Polygon *, zeit : Real) : Vec5
flußBerechnenRand (e : 4-Polygonverbinder *)
flußBerechnenRand (d : Interpolation &)
flusßerechnen (e : 4-Polygonverbinder *,
f : 4-Polygon *, zeit : Real) : Vec5
flußBerechnen (d : Interpolation &,
f : 4-Polygon *, zeit : Real) : Vec5
flußBerechnenRand (e : 4-Polygonverbinder *)
flußBerechnenRand (d : Interpolation &)
Abbildung 3.18: Die an der Kette der Methodenaufrufe beteiligten Klassen und
Schnittstellen in den Elementen bzw. Randelementen und Flächen.
68
KAPITEL 3. BASISENTWURF
Das statische Schema (vgl. Abb. 3.18) sagt noch nichts darüber aus, wann
und auf welche Aufforderung hin die benötigten Interpolationsobjekte erzeugt
werden, wie sie der Fläche zugänglich gemacht werden, und auf welche Art
der berechnete Wert an die anliegenden Elemente übergeben wird.
3.4.4 Methodenauflösung
Die Berechnung der numerischen Flüsse auf den feinsten Flächen in der Hierarchie wird von außen aufgerufen (Iteration), die Kette der Operationen beginnt mit der entsprechenden Methode der Iterationsschnittstelle der Fläche
(vgl. Kap. 3.3.1). Dann müssen zwei Situationen unterschieden werden:
© Die betroffene Fläche liegt zwischen zwei Elementen des Gitters: Der
numerische Fluß wird aus den Daten des Erhaltungsvektors der beiden
anliegenden Elemente berechnet.
© Die Fläche liegt am Rand der Geometrie, also zwischen einem Element
und einem Randelement (vgl. Kap. 3.2.4). Die verschiedenen Randtypen
sollen durch ein polymorphes Verhalten der beteiligten Randelemente
realisiert werden (vgl. Kap. 1.2.4).
Die Auswahl (engl.: dispatch) der Methode zur Berechnung der numerischen
Flußfunktion soll offenbar von zwei polymorphen Objekten abhängen: Dem
Element bzw. Randelement links und rechts der Fläche.
Fij
Vi
Element
Vj
Element
Fläche
flußberechnen (zeit:Real)
flußberechnen (zeit:Real,
left :4−Polygonverbinder *, fläche : 4−Polygon *)
Dji
new ()
Interpolation
flußberechnen (zeit : Real, rechts : Interpolation & , fläche : 4−Polygon *)
new ()
Interpolation
Dij
flußberechnen (zeit : Real,
links : Interpolation &, rechts : Interpolation &)
fluß : Vec5
Gij (D ij (pk), D ji (p k))
fluß : Vec5
fluß : Vec5
Abbildung 3.19: Methodenauflösung im Innern des Gitters: In der dreistufigen
Operationenkette werden die Interpolationsobjekte erzeugt und Referenzen darauf zur Fläche übertragen. Die Berechnung der Flußfunktion findet mit dem zweiten Methodenaufruf an die Fläche statt (Pfeil).
3.4. NUMERISCHES VERFAHREN
69
Diese mehrfache Methodenauflösung (engl.: multiple dispatch) wird durch die
Programmiersprache C++ nicht unterstützt, ersatzweise liefert eine Kette von
einzelnen Methodenaufrufen ein vergleichbares Resultat (visitor pattern) [12].
Die Abläufe sind in den Sequenzdiagrammen dargestellt (vgl. Abb. 3.19-3.21).
Rückgabe- bzw. Resultattyp aller Methoden ist der Wert der numerischen Flußfunktion als Erhaltungsvektor, die erste Stelle, an der dieser Wert berechnet
werden kann, führt die Berechnung durch und läßt die Aufrufkette zurückkehren. Im Inneren des Gitters ist das die Implementierung der Fläche, am Rand
kann das Randelement diese Aufgabe übernehmen. Im Verlauf der Operatio
nen werden auch die Interpolationsobjekte Q , H für die Daten links und
rechts der Bezugsfläche Q erzeugt und gelöscht (rot).
Sobald ein Randelement in der Kette auftritt, ändert sich deren Ablauf entscheidend. Berechnet das Randelement den Wert der Flußfunktion selbst (Ein- bzw.
Ausströmungsrandbedingung), benötigt es dazu eventuell das Interpolationsobjekt für die Daten auf der anderen Seite der Fläche, d.h. von der benachbarten Gitterzelle.
Trifft der Methodenaufruf von der Fläche zuerst auf das Randelement, dann
werden weitere Methodenaufrufe erforderlich, um dieses Datum zum Randelement zu holen“ (vgl. Abb. 3.20). Andernfalls kommt der Aufruf vom Element
”
und das Interpolationsobjekt liegt bereits vor (vgl. Abb. 3.21).
Bemerkung: Der komplizierte Aufbau des numerischen Verfahrens weist den
Vorteil auf, daß alle Situationen, die für ein Finite Volumen Verfahren in Frage
kommen, ohne Änderungen an dieser Struktur (der Schnittstellen) realisiert
werden können, insbesondere auch die Erweiterung auf eine parallele Verarbeitung (vgl. Kap. 4.3).
ª
Fij
Vi
Element
Vj
Rand
Fläche
flußberechnen (zeit : Real)
flußberechnen (zeit:Real,
links : 4−Polygonverbinder *, fläche : 4−Polygon *)
flußberechnenRand (zeit : Real, rechts : 4−Polygonverbinder *)
new ()
Interpolation
Dij
Gij (D ij (pk), D ji (p k))
flußberechnenRand (zeit : Real, links : Interpolation &)
fluß : Vec5
fluß : Vec5
fluß : Vec5
Abbildung 3.20: Methodenauflösung am Rand des Gitters: Der Methodenaufruf
verläuft von der Fläche zum Randelement (links), das durch weitere Methodenaufrufe die Daten des gegenüberliegenden Elements heranholt, um die Flußfunktion
auszuwerten (Pfeil).
70
KAPITEL 3. BASISENTWURF
3.5 Lokale Gitterweitenanpassung
3.5.1 Anforderungen an die lokale Gitterweitenanpassung
Vorab werden drei Eigenschaften zusammengestellt, nach denen das Konzept
zur lokalen Gitterweitenanpassung sowohl im seriellen Basisentwurf, als auch
in dessen Erweiterung auf die parallele Ausführung gestaltet werden soll:
1 Geometrie: Der vorliegende Entwurf beschränkt sich auf die isotrope,
d.h. in alle Raumrichtungen gleichmäßige Verfeinerung eines Hexaederelements durch Achtelung (vgl. Kap. 3.2.5). Das Gitter darf in Folge der
Gitterweitenanpassung auch nichtkonforme Nachbarschaftsbeziehungen
enthalten (vgl. Kap. 3.2.3).
2 Reaktion auf Anforderungen: Die Algorithmen zur Gitterweitenanpassung bearbeiten elementweise vorliegende Anforderungen zur Verfeinerung bzw. Vergröberung. Dabei gelten vom mathematischen Standpunkt
folgende Nebenbedingungen: Eine Anforderung zur Verfeinerung muß
realisiert werden, eine Anforderung zur Vergröberung kann umgesetzt
werden. Das bedeutet, daß das Gitter durchaus feiner sein darf, als vom
numerischen Verfahren verlangt wird.
3 Balancierungsbedingung: Für jede Fläche, die ein angrenzendes Element oder Randelement hat, welches ein Blatt der entsprechenden Hierarchie ist, soll gelten: Entweder die Fläche ist selbst ein Blatt der Hierarchie oder alle Kinder der Fläche sind Blätter der Hierarchie. Alle Methoden, die zur Gitterweitenanpassung beitragen, sind so auszulegen,
daß das Gitter jederzeit diese Balancierungsbedingung erfüllt, also auch
während der Verfeinerung bzw. Vergröberung.
Fij
Vi
Rand
Vj
Element
Fläche
flußberechnen (zeit : Real)
flußberechnen (zeit : Real,
links : 4−Polygonverbinder *, fläche : 4−Polygon *)
Dji
Interpolation
new ()
flußberechnen (zeit : Real, rechts : Interpolation &)
fluß : Vec5
Gij (. , Dji (pk))
fluß : Vec5
fluß : Vec5
Abbildung 3.21: Methodenauflösung am Rand des Gitters: Der Aufruf geht von
der Fläche an das Element, wo ein Interpolationsobjekt erzeugt wird (rot). Mit der
Referenz darauf kann das Randelement den Wert der numerischen Flußfunktion
berechnen.
3.5. LOKALE GITTERWEITENANPASSUNG
71
Die Balancierungsbedingung sorgt einerseits für einen gleichmäßigen Verlauf
der Verfeinerungstiefe, andererseits kann der Verfeinerungsalgorithmus selbst
unter dieser Nebenbedingung auch auf anisotrope Verfeinerungsregeln ausgedehnt werden [3].
Hinweis: Damit die Balancierungsbedingung erfüllt wird, muß das Gitter gegebenenfalls stärker verfeinert oder schwächer vergröbert werden, als es vom
ª
numerischen Verfahren vorgeschrieben wird (vgl. Kap. 1.2.5).
3.5.2 Verfeinerung
Wie bereits im Basisentwurf dargestellt ist, verfügen alle geometrischen Gitterobjekte über Operationen zur Teilung und sind darüber hinaus auch selbst der
Ort, an dem die Assoziationen auf die neuentstandenen Objekte gespeichert
werden (vgl. Kap. 3.2.5). Damit ist das Problem der korrekten Teilung und der
Verwaltung der neu entstandenen Gitterobjekten rein lokal, es betrifft also nur
das zur Teilung aufgeforderte Objekt.
Zu untersuchen bleibt, wie die Beziehungen der geometrischen Objekte untereinander während des Verfeinerungsvorgangs modelliert werden sollen. Man
findet die folgenden zwei Ausbreitungsrichtungen der Verfeinerungsoperationen, die entsprechende Navigationspfade aus den geometrischen Datenstrukturen des Gitters benötigen (vgl. Kap. 3.2):
➘ Propagation (in der Dimension absteigende Ausbreitung) der Verfeinerung: Die Teilung des höherdimensionalen geometrischen Gebildes er0...N
Element
Gitter
Propagationspfad
void verfeinern ()
void anfordern (Regel)
Balancierungspfad
6
1
2
4−PolygonVerbinder
ac
bool balancieren ()
N
Regel anzeigen ()
bool verfeinern (Regel)
void unbedingtVerfeinern (Regel)
hb
ar
4−Polygon
1
2...8
1
Hexaeder
4−PolygonRandelement
bool balancieren (Regel)
void unbedingtVerfeinern (Regel)
void anfordern (Regel)
void verfeinern ()
bool balancieren (Regel)
void unbedingtVerfeinern (Regel)
Außenflächen
6
Kinder
Randfläche
1
Abbildung 3.22: Klassendiagramm mit Darstellung der Beziehungen zwischen
den an der balancierten Verfeinerung beteiligten Objekte bzw. zwischen deren
Klassen. Kanten und Knoten sind nicht dargestellt.
72
KAPITEL 3. BASISENTWURF
zwingt eine Teilung seiner niederdimensionalen Bestandteile. Dazu muß
die Verfeinerungsregel des Bezugsobjekts auf eine Verfeinerungsregel
seiner Berandung projiziert werden.
➚ Balancierung (in der Dimension aufsteigende Ausbreitung) der Verfeinerung: Die eingangs gestellte Forderung nach einer Bedingung zwischen
der links- und der rechtsseitigen Verfeinerung an einer nichtkonformen
Fläche muß im Verlauf der Verfeinerung befriedigt werden.
Die erste Abhängigkeit ist unproblematisch, da die Aufruftiefe eindeutig durch
die Anzahl der Raumdimensionen begrenzt ist, und jeweils die volle geometrische Information verfügbar ist, die benötigt wird, um die Teilungsregel in die
nächstkleinere Dimension fortzusetzen.
Im zweiten Punkt ist die Sache etwas schwieriger, denn alle betroffenen Objekte müssen durch entsprechende Methodenaufrufe in das Geschehen eingebunden werden.
Ablauf
Bevor der Verfeinerungsablauf anhand der zwei Sequenzdiagramme (vgl.
Abb. 3.24, 3.23) in allen Einzelheiten dargestellt wird, sollte verstanden werden, welche Klassen, Schnittstellen bzw. Methoden beteiligt sind.
weitere Flächen
Hexaeder
4-Polygon
4-Polygon
Kante
Hexaeder
verfeinern ()
verfeinern (Regel)
balancieren (Regel)
unbedingtVerf. (Regel)
unbedingtVerf. (Regel)
new ()
4-Rand
4-Rand
Hexaeder
erfolgreich ?
unbedingtVerf. ()
new ()
new ()
Kante
Kante
Kante
4-Polygon
4-Polygon
4-Polygon
erfolgreich ?
unbedingtVerf. ()
unbedingtVerf. (Regel)
unbedingtVerf. (Regel)
new ()
Hexaeder
Hexaeder
Hexaeder
Abbildung 3.23: Ablaufschema der Verfeinerung an der Fläche und am Nachbarelement ausgehend von der Verfeinerung des Elements (links oben).
3.5. LOKALE GITTERWEITENANPASSUNG
73
Ausgelöst wird die Verfeinerung durch die entsprechende Methode der Klasse
Gitter auf den Grobgitterelementen. Sie wird in der Elementhierarchie bis in
die Blätter weitergeleitet, wo die durch einen Fehlerschätzer oder ein Verfeinerungskriterium gesetzte Anforderung vorgefunden wird.
Der nachfolgende Verfeinerungsschritt läuft zweistufig ab (vgl. Abb. 3.23): Für
den Versuch, exakt nach der Anforderung zu verfeinern, muß zuerst die Verträglichkeit mit der Balancierungsbedingung hergestellt werden.
Die Methode balancieren (r : Regel) leitet diese Aufgabe an die anliegenden
Nachbar- bzw. Randelemente weiter. Falls alle Methodenaufrufe ein positives
Resultat liefern, darf das Bezugselement verfeinert werden und es ist sichergestellt, daß die Balancierungsbedingung erfüllt bleibt.
Für den vorliegenden Fall mit der isotropen Elementverfeinerungsregel wird
das Ergebnis der Methode balancieren (r : Regel) immer positiv sein, denn im
Bedarfsfall wird jedes Nachbarelement verfeinert, dessen Verfeinerungssituation nicht mit der Balancierungsbedingung verträglich ist.
Die vom Verfeinerungsalgorithmus genutzten Schnittstellen und Navigationspfade sind im Klassendiagramm (Abb. 3.22) zu erkennen: Die Propagation der
Verfeinerung findet in der Dimension absteigend entlang der Geometriesockelklassen Hexaeder bzw. 4-PolygonRand, 4-Polygon und Kante statt. Hier ist jeweils die volle Geometrieinformation verfügbar, und die Teilungsregeln können
vom anfordernden Objekt projiziert werden.
Hexaeder
4-Rand
4-Polygon
Kante
verfeinern ()
verfeinern (Regel)
balancieren (Regel)
unbedingtVerf. (Regel)
unbedingtVerf. (Regel)
new ()
erfolgreich ?
new ()
Kante
Kante
Kante
4-Polygon
4-Polygon
4-Polygon
immer erfolgreich
new ()
4-Rand
4-Rand
4-Rand
unbedingtVerf. ()
unbedingtVerf. (Regel)
new ()
Hexaeder
Hexaeder
Hexaeder
Abbildung 3.24: Ablaufschema der Verfeinerung am Randstück ausgehend von
der Verfeinerung des anliegenden Elements (links oben).
74
KAPITEL 3. BASISENTWURF
Aufwendiger ist der Balancierungspfad, der benötigt wird, um die Bedingungen
an den nichtkonformen Übergängen einzuhalten (vgl. Kap. 3.2.3): Dort ist nur
die Teilungsregel der zugehörigen Fläche bekannt, weshalb das Element bzw.
Randelement aus den Regeln auf allen anliegenden Flächen eine passende
Elementteilungsregel konstruieren muß.
Das Sequenzdiagramm (vgl. Abb. 3.24) stellt die zeitlichen Abläufe während
der Verfeinerung dar, falls ein Element und sein gegenüberliegendes Randstück
sich verfeinern.
In jedem Fall ist es wichtig, daß die Reihenfolge der Erzeugung der geometrischen Objekte mit den verschiedenen Dimensionen eingehalten wird: Eine
Fläche kann sich nur verfeinern, wenn die anliegenden Kanten bereits konform
mit der neuen Regel geteilt sind usw.
Hinweis: Das Randelement darf auf den Methodenaufruf balancieren (r : Regel) mit einer sofortigen Teilung reagieren, da die Anfrage durch die Fläche
hindurch sicherlich kompatibel mit der Elementanforderung ist (sie kommt von
dort). Tatsächlich muß sogar so vorgegangen werden, weil das Randelement
später nicht nochmals aktiv wird (außer man fügte weitere Methodenaufrufe in
das Schema ein).
ª
3.5.3 Vergröberung
Definition: Der Elementbaum wird an der Stelle eines Elements als potentiell vergröberungsfähig bezeichnet, wenn alle Kinder des Elements Blätter
sind. Das Element übernimmt nach der Vergröberung als Blatt die Aufgaben
der gelöschten Blätter. Analoge Aussagen gelten für die Flächen- und Kantenbäume.
Die Vergröberung findet für Elemente statt, falls alle Kinder weiterhin zur Vergröberung markiert worden sind (durch das numerische Verfahren), und die
Vergröberung nicht die Balancierungsbedingung verletzt.
Ablauf
Elementweise stellt sich das Problem der Vergröberung einfacher dar, als das
der Verfeinerung: Das Element in der Hierarchie, an dessen Stelle der Elementbaum potentiell vergröbert werden kann, löscht seine Kindelemente, die
im Zuge einer früheren Verfeinerung erzeugt worden sind, und natürlich auch
die inneren Flächen, Kanten und Knoten (vgl. Abb. 3.25, 5.8).
Darüber hinaus werden Methodenaufrufe zwischen (Rand-) Element, Fläche,
Kante und 4-Polygonverbinder benötigt, um die Balancierungsbedingung einzuhalten und die Möglichkeit zur Vergröberung an die niederdimensionalen Objekte der Berandung weiterzuvermitteln.
3.5. LOKALE GITTERWEITENANPASSUNG
75
Das Vergröberungskonzept profitiert hinsichtlich seiner algorithmischen Einfachheit von den hierarchischen Navigationswegen (vgl. Kap. 3.2.5). Durch die
entsprechenden Assoziationen kann festgestellt werden, welche Gitterobjekte mit den Elementen gelöscht werden müssen: Alle Komponenten, auf die
vom groben Element, auf den der Baum sich zurückzieht, zugegriffen werden
kann, dürfen ohne weitere Überprüfung gelöscht werden; für die anderen am
groben Element anliegenden Flächen und Kantenbäume wird durch Referenzenzählung festgestellt, ob sie noch von anderen höherdimensionalen Gitterobjekten benötigt werden.
Das Sequenzdiagramm (vgl. Abb. 3.25) zeigt den Ablauf der Vergröberung
am Element, anliegende Randelemente reagieren auf die Vergröberung der
Fläche, so daß sie immer exakt deren Verfeinerungstiefe annehmen (nicht dargestellt).
vergröbern ()
Hexaeder
Feinere Hexaeder
im Hexaeder
Grobe Fläche
Grobe Kante
Hexaeder
4-Polygon
Kante
Feinere Flächen, Kanten und Knoten
im Element, in der Fläche, in der Kante
Hexaeder
Hexaeder
4-Polygon
Hexaeder
Hexaeder
Kante
Hexaeder
Hexaeder
Knoten
vergröbern ()
6 x istBlatt ()
true
Balancierungsbedingung
true
delete ()
delete ()
delete ()
delete ()
vergröbern ()
delete ()
vergröbern ()
delete ()
Abbildung 3.25: Sequenzdiagramm zum Ablauf der Vergröberung. Der Austausch
mit dem Nachbarn zur Absicherung der Balancierungsbedingungen ist transparent gegenüber dem geometrischen Typ des anliegenden Nachbarelements.
76
KAPITEL 3. BASISENTWURF
77
Kapitel 4
Das parallele
Simulationsprogramm
Die Erweiterung des adaptiven Simulationsprogramms auf eine verteilt parallele Verarbeitungsstrategie berührt verschiedene Aspekte, und die folgenden
Abschnitte zeigen, wie das numerische Verfahren für eine Parallelverarbeitung
strukturiert werden muß, wie der Basisentwurf für das adaptive Gitter auf eine
verteilte Datenhaltung erweitert werden kann und wie die neu hinzukommende
Technik für die dynamische Lastverteilung aussieht.
Dazu soll zunächst die Strategie zur Parallelisierung des Finite Volumen
Verfahrens (1.13) und des darauf beruhenden Simulationsprogramms unter
grundsätzlichen Gesichtspunkten dargestellt werden: Dies umfaßt den datenparallelen Ansatz, die Datenaufteilung und den Programmentwurf.
Danach werden die zentralen Komponenten in einem parallelen numerischen
Verfahren zur Lösung partieller Differentialgleichungen auf einem unstrukturierten lokal verfeinerten räumlichen Gitter beschrieben: Die Algorithmen zur
Identifikation, zur lokalen Gitterweitenanpassung und zur dynamischen Lastverteilung sind die Bestandteile einer parallelen Gitterverwaltung, deren Auslegung entscheidend die Komplexität des Programmentwurfs wie auch die Leistungsfähigkeit des Gesamtverfahrens bestimmt.
4.1 Ansatz zur Parallelisierung
Die Parallelisierung eines Finite Volumen Verfahrens durch die Aufteilung des
unterliegenden Gitters der Volumenelemente ist ein ebenso natürlicher wie geeigneter heuristischer Ansatz [22, 36], der jedoch auch durch die Anwendung
des wesentlich allgemeineren Schemas zur Parallelisierung eines Algorithmus
erhalten werden kann (vgl. Kap. 2.1.3) [10].
78
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
4.1.1 Datenparalleler Ansatz
Die Anwendung der vierstufigen Methodik zur Parallelisierung eines Problems
(vgl. Kap. 2.1.3) zeigt, wie der Algorithmus des numerischen Verfahrens (vgl.
Kap. 1.3) für die Parallelverarbeitung zerlegt wird:
Partitionierung: Die Partitionierung des Problems in eine
große Anzahl von Teilproblemen wendet sich auf die Daten an,
wobei die Auswahl so zu treffen ist, daß mit jeder atomaren Einheit bereits die Daten für einen möglichst umfangreichen Teilalgorithmus des Gesamtverfahrens zur Verfügung stehen. Naheliegend ist die Idee, die Iterationen über alle Flächen bzw. Elemente
des Gitters zu zerlegen (vgl. Kap. 1.3) .
Kommunikationsstruktur: Untersucht man die Struktur der
Datenzugriffe über die Grenzen der Elemente und Flächen hinaus, findet man folgende Situation:
© Die Berechnung der numerischen Flüsse (1.13) und
des Verfeinerungskriteriums (1.26) verwendet die Navigationsmöglichkeit entlang der geometrischen Nachbarschaftsrelation (vgl. Kap. 3.2.3). Weiterhin wird aus der
Fläche heraus auf die Knoten zugegriffen.
© Die Berechnung der Zeitschrittweite
(1.24) verwendet
.10
die Daten aus dem betreffenden Element und den Zugriff
vom Element auf die Knoten. Die Zeitschrittweite wird als
Minimum der berechneten Werte über alle Elemente des
Gitters gebildet (globale Operation, vgl. Kap. 2.3.1).
Agglomeration: Der Entwurf der Gitterdatenstrukturen enthält
als Einheiten für eine Agglomeration die Elemente, Flächen, Kanten und Knoten des Grobgitters (vgl. Kap. 3.2.5), denn viele Navigationspfade verlaufen innerhalb dieser Einheiten.
Prozessorzuweisung: Grobgitterelemente mit der gesamten
enthaltenen Verfeinerungsstruktur können zu Teilgittern zusammengesetzt werden, die sich nur an den Rändern von einem
vergleichbaren Gitter im sequentiellen Verfahren unterscheiden.
Die Prozessorzuweisung soll die Abbildung (engl.: mapping) der
Grobgitterelemente auf die einzelnen Teilgitter vornehmen, wobei
jedes Teilgitter von einem Prozessor bearbeitet wird.
Agglomeration und Prozessorzuweisung wenden sich an das selbe Problem,
nämlich die Berechnung einer Aufteilung des Gitters in möglichst großvolumig
zusammenhängende Bereiche. Letztlich ist es vor allem eine Frage der Effizienz, wo die Grenze zu ziehen ist, d.h. welche Elementzahl jeweils aggregiert
werden soll, bevor die Prozessorzuweisung stattfindet.
4.1. ANSATZ ZUR PARALLELISIERUNG
79
Eine optimale Steuerungsmöglichkeit könnte diese Grenze im Verlauf der Simulation variieren, der vorliegende Entwurf ist dazu nicht in der Lage: Durch
die Elementzahl des Grobgitters, das zu Anfang der Berechnung bereitgestellt
wird, ist eine feste Aufteilung der Skalen von Agglomeration und Prozessorzuweisung für die gesamte Simulation vorgegeben, was in zwei Grenzfällen
nachteilige Konsequenzen hat:
© Solange das initiale, grobe Gitter nicht verfeinert wird, kann die Agglomeration keinen Effizienzgewinn bringen, die Aufteilung wird allein von
der Prozessorzuweisung bestimmt: Die Möglichkeit zur Steigerung der
Effizienz einiger Algorithmen besteht eventuell nicht mehr.
© Enthält das Grobgitter nur ein einziges Element, dann kann, gleichgültig
wieviele Elemente im feinsten Gitter entstanden sind, keine Aufteilung auf
mehrere Teilgitter erreicht werden: Die Option zur Parallelverarbeitung
geht verloren.
Der zweite Punkt stellt das gravierendere Problem dar, weshalb im Zweifelsfall
ein Grobgitter mit hoher Elementzahl verwendet werden sollte (vgl. Kap. 6.4.1).
4.1.2 Gliederung des Entwurfs
Weiterhin stellt sich hier die Frage, wie der objektorientierte Ansatz auf die
verteilte Datenhaltung ausgedehnt werden kann, ohne dem seriellen Entwurf
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
«
Adaptives Gitter
Datenhaltung
Numerisches
«
Verfahren
«
«
«
«
«
«
«
«
«
« « « « « « « « « « «
Parallele
Erweiterung
« « « « « « « « « « «
Makrogitterumbau
Initial
«
«
«
«
«
Grobgittertransfer
«
«
«
«
«
«
«
«
« « « « «
« Dyn.« Lastverteilung
« « « «
Lastausgleich
« « « « « « « « « « «
« « Reidentifikation
« « « « « « « « «
« « « « « « « « « « «
Initial
« « « « Identifikation
« « « « « « «
« « « « « « « « « « «
« « « « « « « « « « «
« Teilgittergrenzen
« « « « « « Datenaustausch
« « « «
« « « « « « « « « « «
Benötigt XX zu
Abbildung 4.1: Ausdehnung des Basisentwurfs zu einer parallelen Gitterverwaltung, die das Kooperationspotential zwischen den Modulen nutzt. Die Pfeile zeigen welche Aufgaben wohin delegiert werden.
80
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
ein globales Konzept mit Zugriffsrechten auf alle Daten und Funktionen überzustülpen.
Dies wird nicht allein aus abstrakten Überlegungen heraus angestrebt: Der
Erhalt der Kapselung der Daten und der Aufteilung der Zuständigkeiten aus
dem seriellen Entwurf sowie deren sinngemäße Übernahme in das verteilte
Konzept sichern die Entwicklung gegen eine unbeherrschbare Zunahme von
Komplexität und Funktionsüberschneidungen ab.
Wie dieses Ziel hier erreicht wird, läßt sich am Strukturplan nachvollziehen
(vgl. Abb. 4.1): Die Aufteilung der seriellen Gitterverwaltung auf die Basismodule Adaptive Gitterverwaltung, Numerisches Verfahren und Makrogitterumbau
(links) unterstützt entscheidend die verteilte Gitterverwaltung.
Deren wichtigste Komponenten Dynamische Lastverteilung, Identifikation und
Datanaustausch sind rechts im gelb unterlegten Bereich eingetragen. Die Komponenten des sequentiellen Basisentwurfs selbst erfahren ebenfalls eine Ausdehnung in das parallele Konzept hinein, die in Form einer wohldefinierten
Funktions- bzw. Datenausdehnung im Sinne der Objektorientierung erfolgt.
4.2 Aufteilung des Gitters
Definition: Die nichtüberlappende Zerlegung des ursprünglichen Gitters in
eine Anzahl von Teilgittern ist durch die folgenden Eigenschaften eindeutig beschrieben (vgl. Abb. 4.2):
1. Jedes Kontrollvolumen "# des numerischen Verfahrens (1.13) kommt in
genau einem Teilgitter vor, d.h. in genau einem Teilgitter existiert ein Objekt, das die Geometrie des Kontrollvolumens " beschreibt.
0
1
2
3
Abbildung 4.2: Nichtüberlappende Gebietszerlegung für ein Hexaedernetz in einem Würfel (links) und als schematische Darstellung für ein Dreiecksgitter aus
acht Elementen.
4.2. AUFTEILUNG DES GITTERS
81
2. Falls ein Element, ein Randelement, eine Fläche eine Kante oder ein
Knoten in einem bestimmten Teilgitter vorkommt, dann enthält dieses
Teilgitter auch alle Elemente, Randelemente, Flächen, Kanten und Knoten die vom Bezugsobjekt durch die Navigationspfade der Hierarchie und
der geometrischen Relationen erreicht werden (vgl. Kap. 3.2.2, 3.2.5).
3. Falls ein Element in einem bestimmten Teilgitter vorkommt, dann enthält
dieses Teilgitter auch alle Randelemente die vom Bezugselement durch
den Navigationspfad der geometrischen Nachbarschaft erreicht werden
können (vgl. Kap. 3.2.3). Diese Randelemente gehören zum physikalischen Gebietsrand, der nachfolgend auch äußerer Rand genannt wird.
4. Jeder Navigationspfad der geometrischen Nachbarschaft endet bei
einem Element des Teilgitters oder bei einem Randelement (vgl.
Kap. 3.2.3). Der Navigationspfad der Nachbarschaft verläuft demnach
niemals zwischen zwei verschiedenen Teilgittern, sondern endet gegebenenfalls bei einem Randelement des künstlichen inneren Teilgitterrands.
Diese Art der Aufteilung bedingt, daß kein Navigationspfad von einem Teilgitter
in ein anderes gefunden werden kann. Die Realisierung der Navigationspfade durch Zeiger und Referenzen kann also auch dann beibehalten werden,
wenn die Teilgitter nicht in einem einheitlichen Adreßbereich gespeichert werden (Voraussetzung für die Parallelverarbeitung auf Multicomputern mit dem
Message Passing Programmiermodell, vgl. Kap. 2.1.1, 2.3.1).
Die Aufteilung eines Gitters in eine Anzahl von Teilgittern legt nahe, möglichst
weitgehend die Darstellung der Teilgitter derjenigen des ursprünglichen MonoGitterkonzepts anzupassen.
Der vorliegende Entwurf unterscheidet hinsichtlich der Funktionalität, die auf
dem Niveau der Datenstrukturen und Basisalgorithmen (vgl. Kap. 3) spezifiziert ist, nicht zwischen einem Gitter in einem seriellen Verfahren und einem
Teilgitter im parallelen Verfahren.
Bemerkung: Die Topologie eines unstrukturierten Hexaedernetzes kann
recht kompliziert sein, aber in der Regel lassen sich die wesentlichen Aspekte
bereits an der stark vereinfachten Situation eines strukturierten, in vier Teile
zerlegten Dreiecksnetzes (vgl. Abb. 4.2) herausarbeiten.
Die nachfolgenden Abschnitte verwenden diese reduzierte Darstellung als
Grundlage für Erläuterungen, wann immer die Zusammenhänge durch
den Übergang auf ein komplexes dreidimensionales Gitter keine inhaltliche
Veränderung erfahren.
ª
82
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
4.3 Numerisches Verfahren
Die Ausdehnung des numerischen Verfahrens in das verteilte Gitterkonzept
hinein betrifft die Steuerung der globalen Zeitschrittweite (1.24) und die Bereitstellung eines Interpolationsobjektes für die Berechnung der numerischen
Flußfunktion (vgl. Kap. 1.2.2).
Zeitschrittweite: Zunächst ist klar, daß die Bestimmung des globalen Minimums der Zeitschrittweite über alle Teilgebiete nach genau dieser (direkten)
Vorschrift erfolgen muß, solange mit global einheitlichen Zeitschrittweiten gerechnet wird.
Bemerkung: Der dazu erforderliche globale Kommunikationsschritt wirkt
synchronisierend, weshalb es günstig ist, ihn an einer Stelle durchzuführen,
an der bereits ein synchroner Ausführungsverlauf aus einem anderen Grund
ª
vorliegt.
Berechnung der numerischen Flüsse: Die Zugriffe von den Flächen auf
die anliegenden Elemente im numerischen Verfahren, wie sie im Basisentwurf
zu finden sind, kann auf einem verteilten Gitter in dieser Form nicht mehr direkt realisiert werden, sobald die Fläche ein Teil des inneren Gebietsrandes
ist: Nach der verwendeten Definition der Gebietszerlegung endent der Navigationspfad der geometrischen Nachbarschaft in diesem Fall bei einem Randelement des inneren Randes (vgl. Kap. 4.2).
Interpolationsobjekt als
Teil des Randelements
Teilgittergrenze
Anfordern: Interpolationsobjekt
Anfordern: Interpolationsobjekt
vom Strom rekonstruieren
Interpolation
¬
¬
­
­
¬
¬
­
­
¬
¬
­
­
Interpolation erzeugen
Interpolation
Schnittstelle (abstrakt) an das
Randelement aushändigen
Lesen des Zustands für das
interne Interpolationsobjekt
Interpolationsobjekt in den
Datenstrom schreiben
Datenstrom
Abbildung 4.3: Datenaustausch im numerischen Verfahren über die Schnittflächen der Teilgitter-Teilgittergrenzen hinweg. Dazu wird auf die Möglichkeit
zurückgegriffen, wie im numerischen Verfahren vom anliegenden Element ein Interpolationsobjekt erzeugen zu lassen.
4.3. NUMERISCHES VERFAHREN
83
Hilfreich erweist sich an dieser Stelle die Konstruktion mit den aufgelegten Randelementen (vgl. Kap. 3.2.4): Dort können Daten zwischengespeichert werden,
und es lassen sich Methoden definieren, die auf Anforderungen aus dem numerischen Verfahren der Fläche gegenüber ein elementähnliches Verhalten
aufweisen.
Dem liegt die folgende Idee zugrunde: Im Basisentwurf für das geometrische
Nachbarschaftskonzept und das numerische Verfahren war stets vermieden
worden, Kenntnisse über den konkreten Elementtyp neben einer Fläche vorauszusetzen. Diese Abstraktion hat zu den Interpolationsobjekten als Vermittlung zwischen den Daten auf einem unbekannten geometrischen Elementtyp
und dem bekannten geometrischen Typ der Fläche geführt (vgl. Kap. 3.4).
Im Zuge der Erweiterung des numerischen Verfahrens auf verteilte Gitterdaten wird entscheidend vom diesem Abstraktionsaufwand profitiert. Was auf einer Fläche, die zum inneren (künstlichen) Rand eines Teilgitters gehört, vom
anliegenden Nachbargitter bekannt sein muß, ist lediglich das (äußere) Interpolationsobjekt für diese Fläche. Elementtyp und weitergehende Referenzen
sind nicht erforderlich. Daher kann auf komplizierte Datenausdehnungen wie
Geisterzellen [36] verzichtet werden.
Derartige Hilfskonstruktionen sind immer dann nötig, wenn das numerische
Verfahren in konkreten geometrischen Typen und Datenstrukturen formuliert
ist, bzw. wenn der Navigationspfad längs der Nachbarschaftsrelation keine Abstraktion von der Elementklasse enthält.
Das Schema (vgl. Abb. 4.3) zeigt den Datenaustausch für das numerische Verfahren. Die Realisierung des Randelements für den inneren Rand läßt vom
gegenüberliegenden Element ein Interpolationsobjekt erzeugen. Falls dessen
Schnittstelle auch Methoden zur Objektserialisation [17], also zum Schreiben
Alle identifizierten Flächen
Fläche
Fij
Strom
Element
DatenZumStromSchreiben (s : Strom &)
new ()
Interpolation
Dji
InterpolationSchreiben (d : Interpolation &)
Schreiben (s : Strom &)
Abbildung 4.4: Schreiben der Interpolationsobjekte in den Datenstrom: Wie im
Verlauf des numerischen Verfahrens erzeugt das Element ein temporäres Interpolationsobjekt (Pfeil), dessen Zustand hier aber in einen Datenstrom geschrieben
wird.
84
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
und Lesen seines Zustands in einen bzw. aus einem Datenstrom enthält, kann
das Interpolationsobjekt ohne Kenntnis seines konkreten Typs (hier also der
Approximationsordnung) in den Datenstrom geschrieben werden.
Das Randelement im angrenzenden Teilgitter versucht nach der Übertragung
der Daten, den darin enthaltenen Zustand des Interpolationsobjekts in eine
konkrete Implementierung zu lesen. Dieses Interpolationsobjekt ist allerdings
nicht nur von vorübergehender Lebensdauer, sondern fester Bestandteil des
Randelements, und wird von diesem verwendet, um im numerischen Verfahren
auf Anforderung der Fläche oder des anliegenden Elements das für diesen
Zeitschritt korrekte Interpolationsobjekt zu liefern.
Bemerkung: Wird der Ansatz zur Objektserialisation aus der Programmiersprache JavaTM [17] zugrunde gelegt, könnte das Problem des Einlesens eines
Objekts von unbekanntem Typ in eine konkrete Implementierung (Konsistenzbedingung) vermieden werden, weil das Randelement dann nur mit der Schnittª
stelle eines abstrakten Interpolationsobjekts umgehen müßte.
Die Sequenzdiagramme (vgl. Abb. 4.4, 4.5) zeigen, wie diese Aufgaben in
verschiedenen Schritten gelöst werden. Es fällt auf, daß die Aufrufkette bei
der Fläche beginnt und nicht beim Randelement, wie vielleicht zu erwarten
wäre. Der Grund dafür ist, daß für die Flächen eine Identifikationsrelation (vgl.
Kap. 4.4) besteht, die zur Zuordnung der Randelemente zu den durch sie repräsentierten Elementen verwendet wird.
4.4 Identifikation
Nachdem die Aufteilung des Gitters zur Parallelverarbeitung des numerischen
Verfahrens festgelegt ist (vgl. Kap. 4.2) stellt sich die Frage, wie diejenigen
Flächen, Kanten und Knoten des Gitters, die in mehreren Teilgittern vorkommen, miteinander identifiziert, also in Verbindung gebracht werden können. An-
Alle identifizierten Flächen
Fläche
Fij
DatenVomStromLesen (s : Strom &)
RandPll
Dji
Interpolation
Strom
InterpolationVomStromLesen (d : Interpolation &)
Lesen (s : Strom &)
Abbildung 4.5: Das Lesen der Interpolationsobjekte erfolgt ebenfalls durch Vermittlung der (identifizierten) Flächen. Im Unterschied zum numerischen Verfahren
ist das Interpolationsobjekt (Pfeil) hier Bestandteil des Randelements für den inneren Gebietsrand.
4.4. IDENTIFIKATION
85
schließend muß festgelegt werden, wie diese Verbindungen durch geeignete
Datenstrukturen im Programm zu realisieren sind.
Nachfolgend werden Gitterobjekte, also Datenstrukturen durch die die Geometrie von Elementen, Randelementen, Flächen, Kanten oder Knoten des geometrischen Gitters beschrieben wird durch Großbuchstaben ® <H¯<@g@i@ bezeichnet.
4.4.1 Identifikationsrelation
Definition: Zwei Datenstrukturen ® <u¯ in verschiedenen Teilgittern erfüllen
eine Identitätsrelation :I® <u¯°> ²± genau dann, wenn sie die selbe geometrische
Situation im Gitter beschreiben.
Die Identifikationsrelation : @g<@ > i± ist eine symmetrische, reflexive und transitive
Relation. Ferner orientiert sich diese Definition der Identität an der durch ein
Objekt repräsentierten geometrischen Information, die sich während dessen
Lebensdauer nicht ändert.
Bemerkung: In der Praxis kann nur eine Richtung der Definition genutzt
werden, nämlich jene, daß Datenstrukturen, die eine Identifikationsrelation
erfüllen, auch im Rahmen der Genauigkeit der verwendeten Arithmetik identische Geometrien beschreiben. Die umgekehrte Richtung, also durch den Vergleich der geometrischen Eigenschaften die Identifikationsrelation zu impleª
mentieren, ist hingegen nicht empfehlenswert.
4.4.2 Verbindungssterne
Da die Identifikationsrelation transitiv ist, muß in der Praxis sichergestellt sein,
daß ausgehend von einem Objekt ® alle Objekte ¯W<´³<t@i@i@ in anderen Teilgittern
1
2
2
3
1
2
2
3
4
5
5
6
4
5
5
6
4
5
5
6
4
5
5
6
7
8
8
9
7
8
8
9
Abbildung 4.6: Verbindungssterne zwischen identifizierten Knoten eines Dreiecksgitters: Die Vollverbindung speichert alle Zuordnungen auf jedem Objekt
(links). Durch die Auszeichnung eines Objekts als Besitzer oder Zentrum kann
die gleiche Funktionalität mit weniger Verbindungen erreicht werden.
86
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
gefunden werden können, die mit diesem identifiziert sind: Die Skizze (vgl.
Abb. 4.6) zeigt zwei Möglichkeiten, den Identifikationsstern auszulegen: Die
vollständige Verbindung stellt die gesamte Information auf jedem Objekt bereit.
Um Informationen zwischen zwei beliebigen Enden des Sterns auszutauschen,
genügt hier ein Schritt in der Datenübertragung.
Die Situation rechts zeichnet den Knoten des Teilgitters links oben als Zentrum
des Sterns aus. Der Austausch von Information zwischen zwei beliebigen Endpunkten verläuft über dessen Zentrum in zwei Schritten. Dieser Ansatz benötigt
geringere Datenmengen, ist aber gegenüber der Latenzzeit [15] des Kommunikationsvorgangs sensibler.
Alle anderen topologischen Ausprägungen des Verbindungssterns (z.B. Ringe, Bäume oder allgemeine Würfel) haben den entscheidenden Nachteil, daß
die Anzahl der benötigten Kommunikationsvorgänge (und damit die Latenzzeit
einer bestimmten Operation) von der Größe des Sterns abhängt.
Der vorliegende Entwurf macht von der zweiten beschriebenen Möglichkeit Gebrauch: Unter allen Objekten, die in einem Verbindungsstern zusammenhängen, wird das zu dem Teilgitter mit der kleinsten logischen Nummer
gehörende als Zentrum ausgezeichnet.
4.4.3 Schlüssel
Die Topologie eines unstrukturierten Gitters liegt zum Zeitpunkt der Programmentwicklung nicht fest, weshalb keine Möglichkeit zu einer impliziten Darstellung der Identifikationsrelation, wie z.B. durch eine Indextransformation auf
strukturierten Gittern, besteht.
Eine geeignete Vorgehensweise zur Implementierung der Identifikationsrelation besteht darin, alle Objekte, für die diese Relation überprüft werden muß,
mit einem Schlüssel auszustatten, so daß die Schlüssel verschiedener Obekte
genau dann gleich sind, wenn die Identifikationsrelation erfüllt ist [5]:
Definition: Allgemein ist ein Schlüssel µ ein Datentyp für den eine strikt
schwache Ordnungsrelation : @i<t@Q>u¶¸·º¹ definiert ist:
1. Für zwei Schlüssel » und » gilt: Entweder {: » < » > ¸¶ ·º¹ oder {: » < » > ¶¸·º¹ trifft zu.
Zwei Schlüssel gelten als gleich, falls :{» < » > ¶¸º
· ¹ und :{» < » > ¶¸·º¹ falsch sind.
2. Für drei Schlüssel » , » und » für die :» < » > ¶¸·º¹ wahr ist, gilt: Entweder
:» < » > ¶´·º¹ oder :{» < » > ¶´·º¹ trifft zu.
Hier muß weiterhin vorausgesetzt werden, daß der verwendete Datentyp einen
Austausch von Schlüsseln zwischen verschiedenen Prozessen der Anwendung mit den Mitteln des Message Passing Programmiermodells ohne Verlust
von Information zuläßt (vgl. Kap. 2.3).
4.4. IDENTIFIKATION
87
Da die Vergabe und Verwaltung global (bezüglich aller Teilgitter) eindeutiger
Schlüssel für Flächen, Kanten und Knoten sehr aufwendig ist, sind zunächst
einige Forderungen an ein Konzept zur Vergabe von Schlüsseln und an die
Schlüssel selbst zusammengestellt, die es unter anderem ermöglichen, die
geometrischen Eigenschaften des Gitters zur Verbesserung der Effizienz heranzuziehen:
Die Schlüssel sollen möglichst einfach sein, wenig Daten beanspruchen
und die Implementierung schneller Vergleichsoperationen zulassen.
Begründung: Diese Bedingung ist die Voraussetzung dafür, daß die
Identifikationsabbildung nach einer Neuverteilung des Gitters schnell und
effizient berechnet werden kann.
Die Schlüssel sollen voneinander abgeleitet werden können.
Begründung: Dies wird nahegelegt, damit der Schlüssel für ein Gitterobjekt höherer Dimension (Kante, Fläche, Element) aus den Schlüsseln
der anliegenden Objekte niedriger Dimension aufgebaut sein kann (vgl.
Abb. 4.8).
Möglichst wenige Schlüssel sollen zu Beginn der Identifikation auf dem
verteilten Grobgitter gespeichert sein.
Begründung: Falls der Algorithmus mit einem verteilten Startgitter beginnt, müssen dort die Daten zur Berechnung der Identifikationsabbildung durch den (externen) Partitionierer hinterlegt werden. Bei einer Umverteilung des Gitters müssen die Basisinformationen zur Neuberechnung der Identifikationsabbildung zusätzlich übertragen werden, insofern
ist auch hier auf Umfang, Komplexität und Redundanzfreiheit zu achten.
Die Schlüssel sollen für Objekte gleicher geometrischer Dimension von
gleichem Typ sein.
Begründung: Auf diese Art kann der Identifikationsalgorithmus unabhängig von den verwendeten geometrischen Elementtypen im numerischen Verfahren definiert werden. Der Typ des Schlüssels wird anhand
des Typs der von dem betreffenden Objekt implementierten Iterationsschnittstelle bestimmt (vgl. Kap. 3.3, Abb. 3.16).
Um den aufgestellten Forderungen zu entsprechen, wird das folgende
Schlüsselkonzept als Basis des Identifikationsmoduls in den Entwurf integriert.
Die Typen der Schlüssel sind innerhalb jeder Dimension der geometrischen
Objekte einheitlich. Die nachfolgende Aufstellung zeigt wie für Knoten, Kanten
und Flächen passende Schlüssel erzeugt werden können:
88
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
¼
= (1)
¼
½
Kante: Der Schlüssel einer Kante wird aus dem geordneten
Paar der Nummern der anliegenden Grobgitterknoten gebildet.
= (1,4)
¾
¼
½
= (1,4,7)
¼
¾
¿
Knoten: Als Schlüssel eines Grobgitterknotens wird eine
global eindeutige Knotennummer verwendet. Diese Knotennummer wird nach dem Aufbau des Grobgitters nicht mehr
verändert und es kommen keine weiteren Nummern hinzu.
½
Fläche: Für eine beliebige Fläche wird der Schlüssel aus den
globalen Knotennummern dreier anliegender Knoten gebildet.
Damit ist der Schlüssel bereits eindeutig.
Die drei Knoten sind dabei wie folgt auszuwählen: Die kleinste
anliegende Knotennummer und die Nummern der längs des
Polygons benachbarten Knoten bilden aufsteigend geordnet
einen Vektor mit drei Einträgen.
= (1,4,7)
Hinweis: Mit den Konventionen zur globalen Ausrichtung der Flächen und
Kanten im Grobgitter kann auf die Ordnung der Paare bzw. Vektoren verzichtet
ª
werden (vgl. Kap. 3.2.2).
4.4.4 Speicherung der Identifikationsrelationen
Durch das beschriebene Schlüsselkonzept kann die Identifikationsrelation
paarweise nachgeprüft werden. Damit liegt aber noch kein ausreichend leistungsfähiges Verfahren zum Austausch von Daten im numerischen Verfahren
zwischen den identifizierten Gitterobjekten vor (vgl. Kap. 4.3). Deshalb wird
aus den Informationen, die in Form der Schlüssel zur Verfügung stehen, eine
neue Datenstruktur berechnet, die einen effizienteres Vorgehen beim Datenaustausch unterstützt [5, 22].
Diese Technik wurde zunächst für verteilte Gitter ohne Gitterweitenanpassung
und dynamische Lastverteilung entwickelt, weil in diesem Fall die Datenstruktur
nur genau einmal zu Anfang berechnet werden muß [14], und sich der entstehende zusätzliche Aufwand in jedem Fall durch die erhebliche Beschleunigung
im Datenaustausch auszahlt.
Damit dieser Ansatz auch auf eine Gitterverwaltung mit zeitlich veränderlicher
Gitterstruktur übertragen werden kann, müssen sehr effiziente Algorithmen
eingesetzt werden, weil andernfalls die Neuberechnung der Datenstruktur bei
häufiger Veränderung des Gitters zu gravierenden Leistungseinbußen führt.
4.4. IDENTIFIKATION
89
Datenstruktur
Da im numerischen Verfahren alle Operationen über Elemente oder Flächen
iteriert stattfinden, kann auch der Datenaustausch entsprechen zusammengefaßt werden. Der Behälter, der lokal auf einem Teilgitter die Menge der
mit Objekten eines anderen Teilgitters identifizierten Gitterobjekte speichert,
muß dann keinen direkten Zugriff auf der Basis von Schlüsseln ermöglichen,
vielmehr kann anhand der Darstellung (vgl. Abb. 4.7) nachvollzogen werden,
daß in einem Kommunikationssystem mit Vektorpuffern versucht werden sollte, möglichst viele Beziehungen gleichzeitig in einem Kommunikationsschritt zu
bearbeiten. Im vorliegenden Fall sind alle Knoten, die zum linken und rechten
Teilgitter gehören, im Sinne der beschriebenen Operation (Zuweisung, Kopie)
gleichwertig.
1. Die Daten der Knoten im linken Teilgitter werden in einer vorgegebenen
Reihenfolge in die Sendezeile geschrieben.
2. Übertragen der Sendezeile in die Empfangszeile des rechten Teilgitters.
3. Die Daten werden in der bestehenden Reihenfolge gelesen und an eine
Stelle geschrieben, die durch einen Vorwärtsiterator des entsprechenden
Behälters [2, 27] referenziert wird.
Die Information der Identifikationsabbildung liegt hier auf keinem Teilgebiet
vollständig vor, sie ist vielmehr im Zusammenspiel der korrespondierenden
Vorwärtsiteratoren zu finden.
Zeile an ein anderes Teilgitter übertragen
Daten in die Sendezeile schreiben
4,5 9,0 0,0
1,1
4,5
?,?
8,5
3,7
9,0
?,?
6,2
1,9
0,0
?,?
2,7
Daten aus der Empfangszeile lesen
4,5 9,0 0,0
Abbildung 4.7: Datenstruktur zur Speicherung der Identifikationsrelationen: Es
genügt die Möglichkeit zur Vorwärtsiteration längs der identifizierten Objekte, um
die Daten in die Sendezeile zu schreiben, bzw. sie aus der Empfangszeile des
Kommunikationssystems zu entnehmen.
90
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
Algorithmus zur Berechnung der Datenstruktur
Ein einfacher Algorithmus zur Berechnung der Datenstruktur aus den lokal
verfügbaren Schlüsseln sieht für Knoten, Kanten und Flächen identisch aus
und benötigt zwei Kommunikationsschritte (vgl. Kap. 5.8).
Algorithmus 4.1: Der Algorithmus ist auf allen Teilgebieten in gleicher Weise auszuführen, wobei nachfolgend die Ausführung auf dem Teilgebiet zum
Index ÀEJÁ¨ <t@i@i@g< ¥ , N5à betrachtet wird. Zu Beginn liegen auf dem Teilgebiet die
Schlüssel T *+ Á» * Es gibt im Teilgebiet À ein lokales Objekt zu » “ Ã vor (vgl.
”
Kap. 4.4.3).
1. Führe einen (globalen) Kommunikationsschritt mit jedem Teilgebiet zum
Index Ä * Ä+ Å À durch: Sende dabei die Menge T und empfange T .
¡
U ) für jeden Schlüssel »GE
2. Bestimme aus den vorliegenden TºÆ £ Æ l
xQxQx Ç Abb. 4.6):
den Verbindungsstern È:{» > (Vgl. Kap. 4.4.2,
È:» > *+
T ÁzÄoEJÁɨ <@g@i@i< ¥ , N5à * »mE T à @
Erfolgt die Berechnung von È:» > für einen bestimmten Schlüssel auf
mehreren Teilgebieten, dann sind die jeweils berechneten È:{» > identisch.
3. Bilde für jeden Index Ä < ÄÊ+ Å À eine Familie von Schlüsseln (hier: eine
Menge in beliebiger aber festgelegter Reihenfolge):
T 1*Q+ÌË » l <t@i@g@i< » < @g@i@g< » & U ) * » E T und
À +
µSÒ @
ÆÂÏ5hÍÐ fiÎ ¶´Ñ
v y
Das Teilgebiet wird genau dann Besitzer eines Objekts, wenn dieses dort
lokal vorliegt und jedes andere Teilgebiet, auf dem ein Objekt mit identischem Schlüssel vorliegt, einen größeren Index hat. (vgl. Kap. 4.4.2).
4. Führe einen (lokalen) Kommunikationsschritt mit jedem Teilgebiet zu ei
nem Index Ä * ÄÊ+ Å À <#T SÓ T +Y
Å Ô aus: Sende T und empfange T .
Å Ô eine Liste Ö mit Referenzen auf die
Erstelle zu jedem Index Ä * T +Õ
mit den Schlüsseln »mET verbundenen lokalen Objekte.
5. Suchvorgang: Erstelle zu jeder Familie T eine Liste × mit Referenzen
auf die mit den Schlüsseln »ØET verbundenen lokalen Objekte.
Ù
Nach Abschluß des Algorithmus liegen auf allen Teilgebieten Listen Ö und × vor, für die gilt:
× +ÚÔ @
2 2
2 2
2 2
2. Ö + × und Ö +
1. Ö +
2 2
× @ Was im Besitz des Gebiets À liegt (Liste Ö ),
liegt im Nicht-Besitz des Gebiets Ä (Liste × ) .
4.4. IDENTIFIKATION
3.
91
b
À<Ú
Ä EÌÁ¨ <@g@i@g< ¥ , N5à gilt: Die in der Liste Ö auf Teilgitter À und in der
Liste × auf Teilgitter Ä enthaltenen Referenzen verweisen auf Objekte mit
identischen Schlüsseln (vgl. Abb. 4.7).
Algorithmus 4.1 ist generisch, d.h. er ist identisch zur Berechnung der Datenstrukturen für Knoten, Kanten und Flächen anwendbar. Dies kann in beliebiger
Reihenfolge nacheinander geschehen, es bestehen keine Abhängigkeiten.
Der Mangel des Algorithmus läßt sich im ersten Schritt bei der Berechnung der
Verbindungssterne È:» > erkennen: Der globale Austausch aller Schlüssel ist
aufwendig und nicht skalierbar.
Falls jedoch der Verbindungsstern È:» > für jeden lokalen Schlüssel »ÕE T schon a-priori bekannt ist, kann auf den nichtskalierbaren Teil des Algorithmus
verzichtet werden, denn die weiteren Schritte betreffen nur Teilgitter, die geometrisch in einem Punkt, einer Kante oder einer Fläche aneinander grenzen.
Durch eine geeignete Aufteilung des Gitters kann hier eine skalierbare Situation erreicht werden [5].
Die nachfolgend beschriebene Modifikation des Algorithmus nutzt aus, daß die
Datenstruktur nicht für beliebige Mengen von Schlüsseln berechnet wird, sondern für Knoten, Kanten und Flächen eines geometrischen Gitters.
Beschleunigung des Algorithmus
Eine Möglichkeit zur Beschleunigung des Identifikationsalgorithmus 4.1 ist
durch die geometrischen Zusammenhänge im Gitter gegeben, unter deren
0
9
6
0
3
3
0
1
2
3
4
6
⇓
5
0
0
5
0
6
4
⇓
6
0
5
1
3
0
Abbildung 4.8: Beschleunigung der Identifikationsphase durch Schätzung der
Verbindungssterne: Sobald die Verbindungssterne der Knoten des Grobgitters
bekannt sind, können die der Kanten und Flächen durch Schnittmengenbildung
abgeschätzt werden.
92
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
Ausnutzung sich das Problem, daß alle Schlüssel von allen Teilgittern für jedes Objekt zu allen anderen Teilgittern kommuniziert werden müssen, für die
zu Flächen und Kanten gehörenden Schlüssel umgehen läßt:
Wie im Schema (vgl. Abb. 4.8) angedeutet ist, kann der maximale Verbindungsstern für den Schlüssel »;:µ > einer Kante µ bzw. »;:Û > einer Fläche Û durch die
Schnittmenge der Verbindungssterne aller Schlüssel »;:DÜ & > , die zu anliegenden
Knoten Ü & gehören, abgeschätzt werden:
» + »;:µ > bzw. » + »;:{Û > * È:{» >ÞÝÈ
ß :{» >A<àÈ
ß :{» > *+
á
â ÑIÏPãÂÆ bzw. â ÑIÏPãÂä
È:{» :IÜ u> >@ (4.1)
Dies senkt die Menge der zu verteilenden Daten entscheidend und führt von
der unskalierbaren (alle Teilgitterdaten überall) zu einer skalierbaren Situation
(nur Daten der benachbarten Teilgitter).
Modifizierter Algorithmus 4.2: Ein beschleunigter Algorithmus zur Berech nung der Datenstruktur :IÖ < × > für Knoten, Kanten und Flächen entsteht, falls
der erste Schritt des Algorithmus 4.1 durch die untenstehenden Schritte 1' und
1” ersetzt wird und die Berechnung zuerst für die Knoten des Gitters durchgeführt wird:
1' Wird die Datenstruktur :IÖ < × > für Knoten des Gitters berechnet, dann
b
setze »E T * È
ß :» > + Áɨ <t@i@g@i< ¥ , N5à , sonst berechne È
ß :{» > für den
Schlüssel » nach der Vorschrift (4.1).
1” Lokaler Kommunikationsschritt: Für alle lokal vorliegenden Schlüssel »mE
T : Verteile » an alle Teilgitter Ä für die gilt ÄJE È
ß :» > , wobei die Herkunft
jedes eingehenden Schlüssels bekannt ist.
Ù
4.4.5 Gesamtverfahren zur Identifikation
Mit dem Schlüsselkonzept (vgl. Kap. 4.4.3) und den Datenstrukturen zur Speicherung der Identifikationsrelationen (vgl. Kap. 4.4.4) liegen Techniken vor, die
auf sporadische Änderung der Gitterstruktur angemessen schnell reagieren
können und deshalb geeignet sind, nach der dynamischen Lastverteilung alle
Datenstrukturen neuzuberechnen.
Dazu wird angenommen daß die dynamische Lastverteilung ein gegenüber
den Zeitschritten des numerischen Verfahrens sporadisch auftretendes Ereignis in der Simulation ist (vgl. Kap. 6.2), was für die lokale Gitterweitenanpassung allerdings nicht zutrifft, weil das Gitter in jedem Zeitschritt an die berechnete Lösung angepaßt werden soll.
4.4. IDENTIFIKATION
93
Insofern muß für die Darstellung der Identifikationsrelationen ein Konzept gefunden werden, das von den lokalen Veränderungen in der Verfeinerungsstruktur unabhängig ist und in seiner Effizienz nicht von der Häufigkeit der
Verfeinerungs- bzw. Vergröberungsvorgänge abhängt.
Implizite Identifikation der Hierarchie
Der verwendete Ansatz nutzt die Navigationspfade, die innerhalb des Gitters
durch den Verfeinerungsvorgang entstehen (vgl. Kap. 3.2.5) zur impliziten Darstellung der Identifikationsrelationen und erzeugt auf diese Art überhaupt keinen Mehraufwand gegenüber dem seriellen Verfahren mit nur einem Gitter, d.h.
es findet nach oder während der Verfeinerung bzw. Vergröberung des Gitters
keinen Änderung der Datenstrukturen Ö und × statt.
Dies wird erreicht, indem die Datenstrukturen Ö und × nur zur Speicherung
der Identifikationsrelationen auf dem Grobgitter verwendet werden, die Ite-
ï
ò
êë
î
êë
ñ
ìë
íî
ìë
ðñ
é æ
è æ
åæ
ç æ
Abbildung 4.9: Implizite Identifikation durch identische Verfeinerungsgeschichte:
Über die Teilgittergrenze hinweg stehen sich identische, global einheitlich ausgerichtete Verfeinerungsbäume gegenüber. Der Verlauf der Iteration in der Flächenhierarchie ist unten dargestellt (vgl. Abb. 4.9). Das Gesamtverfahren verwendet
Schlüssel zur Identifikation der Grobgitterflächen, -kanten und -knoten zusammen mit den hierarchischen Navigationspfaden.
94
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
ration der Verfeinerungsstruktur hingegen nicht durch eine zusätzliche Liste,
sondern durch die bestehenden hierarchischen Navigationspfade vermittelt
wird: Durch die globale Ausrichtung der Kanten und Flächen des Grobgitters
(vgl. Kap. 3.2.2) werden Bäume mit identischer Verfeinerungsgeschichte auch
gleichartig durchlaufen.
Für diese implizite Identifikation ist vorausgesetzt, daß jede Verfeinerung auf
allen miteinander identifizierten Objekten gleichmäßig stattfindet (Aufgabe des
verteilten Verfeinerungsalgorithmus, vgl. Kap. 4.5).
Identische Argumente gelten für die Kantenbäume, die aus Kanten des groben Gitters bzw. aus verfeinerten Flächen entstanden sind, gleichermaßen
wie für Knoten die innerhalb von Kanten und Flächen entstanden sind: Die
Identifikation wird hier ebenfalls implizit durch die Ausrichtung der Kanten bzw.
Flächen des Grobgitters und die Iterationsverfahren geleistet (vgl. Kap. 3.2.5,
Abb. 3.13).
Im Unterschied zum Basisentwurf können jetzt Flächen, Kanten und Knoten in
einem Teilgitter vorkommen, die von keinem Element dort referenziert werden.
In der Abbildung enthält das Gitter rechts die feinen Flächen, obwohl die Elemente dort nicht so weit verfeinert sind, bzw. dort kein Element gefunden wird,
von dem aus eine Navigation zu den feinen Flächen möglich ist.
Zusammenfassung: Die Strategie zur Identifikation, die im parallelen Simulationsprogramm realisiert ist, verwendet unterschiedliche Ansätz für das Grobgitter und die hierarchische Struktur, die durch die lokale Gitterweitenanpassung entstanden ist:
© Zur Identifikation der Flächen, Kanten und Knoten des Grobgitters werden Schlüssel eingesetzt, damit keine Einschränkungen an die Topologie
des Grobgitters durch die Parallelverarbeitung entstehen.
© Da die Verfeinerungsregeln schon zur Zeit der Programmentwicklung bekannt sind, können die hierarchischen Navigationspfade verwendet werden, um die Identifikationsrelationen zu implementieren.
Die Vorteile dieser Strategie sind offensichtlich: Die Topologie des Grobgitters,
die in der Regel durch den verwendeten Gittergenerator vorgegeben wird und
für praktische Anwendungen sehr kompliziert sein kann, unterliegt keinen Einschränkungen, das Grobgitter bleibt auch im parallelen Programm ein unstrukturiertes Gitter. Durch Ausnutzung der hierarchischen Navigationswege findet
die Neuberechnung der Datenstrukturen, die zur Darstellung der Identifikationsrelationen dienen, nur nach einer dynamischen Lastverteilung statt, jedoch
nicht nach einer Gitterweitenanpassung.
Auf diese Art wird die Effizienz der Gitterweitenanpassung durch die im parallelen Programm notwendige Identifikation der Teilgitter nicht betroffen.
ª
4.5. LOKALE GITTERWEITENANPASSUNG
95
4.5 Lokale Gitterweitenanpassung
Auch für die Algorithmen zur Gitterweitenanpassung soll versucht werden, die
Ausdehnung in das parallele Gitterkonzept hinein ohne massive Eingriffe in den
bestehenden seriellen Entwurf vorzunehmen.
Weil die verteilte Gitterverwaltung auf getrennten, aber in ihrem Charakter
zum Basisentwurf identischen Teilgittern basiert, darf in jedem Teilgitter verfeinert bzw. vergröbert werden, ohne daß dadurch dessen Integrität gefährdet
ist. Natürlich ist nicht zu erwarteten, daß die Strukturen zur Identifikation (vgl.
Kap. 4.4.5), die das verteilte Gitter über die lokalen Teilgitter hinaus enthält,
nach einem solchen unkoordinierten Vorgehen noch korrekt sind. Dies kann
aber erreicht werden, falls der verteilte Algorithmus zwei Bedingungen genügt:
1. Die lokalen Verfeinerungs- und Vergröberungsvorgänge auf den Teilgittern müssen so ablaufen, daß die Balancierungsbedingung auch über
die Teilgittergrenzen hinweg eingehalten wird (vgl. Kap. 3.5.1).
2. Die Verfeinerungssituation auf identifizierten Objekten, also auf den
Flächen und Kanten am Teilgitterrand muß nach Abschluß des Algorithmus identisch sein (vgl. Kap. 4.4.5).
Damit liegt die Idee nahe, die Methoden zur Gitterweitenanpassung, die aus
dem Basisentwurf stammen, innerhalb der vergleichbaren Methoden für das
verteilte Gitter unverändert anzuwenden, wobei die zusätzlichen Forderungen
durch geschickt gewählte Schritte zur Vorbereitung bzw. zum Abschluß der
Verfeinerung erfüllt werden.
4.5.1 Verfeinerung
Der verteilte Verfeinerungsalgorithmus läßt sich im vorliegenden Fall, also für
ausschließlich isotrope Verfeinerungsregeln auf Element und Fläche, einfach
aus dem sequentiellen Verfeinerungskonzept entwickeln.
Weil die Methode balancieren (r:Regel) für die verwendeten isotropen Regeln das Gitter immer so verändert, daß die Balancierungsbedingung erfüllt
bleibt (vgl. Abb. 3.23), wird die Verfeinerung eines Elements nie durch seine Nachbarn blockiert. Der verteilte Verfeinerungsalgorithmus kann in deshalb
vier Phasen zerlegt werden (vgl. Abb. 4.10), wobei die zweite Phase den sequentiellen Verfeinerungsschritt auf einem Teilgitter enthält:
I Vorbereitungsphase: Die implizit vorliegende Identifikationsrelation für
die Flächen und Kanten wird auf jedem Teilgitter in einer geeigneten
Datenstruktur gesichert, weil die miteinander identifizierten Teilbäume
vorübergehend eine unterschiedliche Verfeinerungssituation aufweisen
können (vgl. Kap. 4.4.5). Diese Datenstrukturen werden in den Schritten
(3) und (P) benötigt.
96
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
1+2 Serieller Verfeinerungsschritt: Alle Teilgitter werden nach Maßgabe der
Verfeinerungsanforderung verfeinert und erfüllen nur noch lokal die Balancierungsbedingung, d.h. diese kann über die Teilgittergrenzen hinweg
teilweise verletzt sein (vgl. Kap. 3.5.1).
3 Iterative Balancierungsphase: Anschließend werden über die Flächen
die Verfeinerungsregeln zwischen den Teilgittern ausgetauscht und weitere Elemente verfeinert um die Balancierungsbedingung wieder herzustellen. Dieser Schritt muß iteriert werden, bis keine Elemente mehr verfeinert werden (globales Abbruchkriterium).
P Ausgleichsschritt: Abschließend werden die identifizierten Kantenbäume
hinsichtlich ihrer Verfeinerung abgeglichen. Dies benötigt nur einen
Schritt, weil die Verfeinerung einer Kante keine in der Dimension aufsteigende Rückwirkung auf Flächen oder Elemente hat.
Entscheidend für die Arbeitsweise des parallelen Verfeinerungsalgorithmus ist,
daß jedes Element, jede Fläche und jede Kante in einem Verfeinerungsschritt
höchstens einmal geteilt wird.
óô
õ ô
ö ô
Abbildung 4.10: Ablauf der Verfeinerung im verteilten Gitter: Das rot eingezeichnete Element im linken Teilgitter soll verfeinert werden. Die Verfeinerung geht
durch die Fläche auf das benachbarte Teilgitter über und erzwingt dort die Verfeinerung eines Elements, damit die Balancierungsbedingung erfüllt bleibt.
4.5. LOKALE GITTERWEITENANPASSUNG
97
Die iterative Balancierungsphase (3) ist der von der Laufzeit gesehen der
aufwendigste Teil des verteilten Verfeinerungsalgorithmus, denn nach jedem
Schritt muß für alle Teilgitter mittels globaler Kommunikationsvorgänge geprüft
werden, ob dort weitere Elemente (am Rand) verfeinert worden sind und deshalb ein weiterer Balancierungsschritt erforderlich ist (vgl. Kap. 6.1.4).
Der verteilte Verfeinerungsalgorithmus erzeugt bei gleicher Markierung eine
zum sequentiellen Algorithmus identische Verfeinerungssituation.
4.5.2 Vergröberung
Um den Vergröberungsalgorithmus des Basisentwurfs (vgl. Kap. 3.5.3) in das
parallele Konzept übernehmen zu können, muß ein zusätzliches Problem beherrscht werden, denn die Teilgitter enthalten Flächen und Kanten, die keine
niederdimensionalen Bestandteile der Elemente bzw. Flächen des Teilgitters
sind, und daher auch nicht durch die Zählung von Referenzen aus dem Teilgitter vor der Löschung bewahrt werden (vgl. Abb. 4.9). Weil die Datenstrukturen des Basisentwurfs nur Eigenschaften des seriellen Gitters beschreiben
sollen, wird darauf verzichtet, die Referenzenzähler einfach von außen auf den
globalen Wert (also die Summe aller Zähler auf dem Verbindungsstern) einzustellen. Ein vernünftigerer Ansatz besteht darin, im Basisentwurf bereits eine
Möglichkeit zum Unterbinden der Vergröberung vorzusehen, ohne dort davon
Gebrauch zu machen.
Zusammen mit dieser Möglichkeit kann der verteilte Algorithmus zur Vergröberung ebenfalls durch Hinzufügen einiger Schritte zum seriellen Algorithmus des
Basisentwurfs formuliert werden:
I Vorbereitungsphase: Alle Flächen und Kanten des Gitters, die potentiell
vergröbert werden können und in meherern Teilgittern vorkommen, sind
gegen die Vergröberung zu sperren (vgl. Kap. 3.5.3), wozu ein geeigneter
Mechanismus vorzusehen ist.
S Serieller Vergröberungsschritt: Der verteilte Algorithmus zur Vergröberung ruft hier die entsprechende seriellen Methode des Teilgitters auf, um
die möglichen Vergröberungen vorzunehmen.
P Abschlußschritt: Die in Schritt (I) gegen eine Vergröberung gesperrten
Flächen und Kanten werden jetzt (in dieser Reihenfolge) daraufhin untersucht, ob eine Vergröberung stattfinden kann. Dazu sind die Referenzenzähler über die Teilgittergrenzen hinweg zu vergleichen. Falls in einem Teilgitter eine Referenz gefunden wurde, darf das Objekt nirgends
gelöscht werden.
Die durch den sequentiellen bzw. den verteilten Algorithmus zur Vergröberung
erzeugten Gitter sind bei gleicher Anforderung und gleichem Ausgangsgitter
nicht unbedingt gleich. Dies ist auch nicht zu erwarten, denn das Resultat der
98
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
Anwendung des Vergröberungsalgorithmus aus dem Basisentwurf hängt nicht
nur von den gesetzten Markierungen und dem aktuellen Verfeinerungszustand
ab, sondern offenbar auch von der Reihenfolge, in der die vergröberungsfähigen Knoten in der Elementhierarchie besucht werden.
4.6 Dynamische Lastverteilung
Im letzten Abschnitt dieses Kapitels kann nun die Komponente für die dynamische Lastverteilung während der parallelen Simulation vorgestellt werden.
Wie in der Einleitung zu diesem Kapitel (vgl. Abb. 4.1) ausgeführt ist, sollen
alle Strukturen des verteilten Programms, die nicht integrale Bestandteile der
dynamischen Lastverteilung sind, davon unabhängig formuliert werden, wobei
darauf zu achten ist, daß der Funktionsinhalt letztlich auch zur dynamischen
Umverteilung des Gitters verwendet werden kann.
Das Modul zur Umverteilung des Gitters reagiert auf jede Änderung der Verfeinerungsstruktur des Gitters (vgl. Kap. 5.5) und besteht aus zwei Komponenten:
Eine Datenbasis wird lokal auf allen Teilgittern erstellt. Darin sind alle Informationen enthalten, die benötigt werden zu bewerten, ob und gegebenenfalls wie
eine Neuaufteilung des Grobgitters vorzunehmen ist.
óô
õ ô
ö ô
Abbildung 4.11: Ablauf der Vergröberung im verteilten Gitter: Die rot eingezeichneten Elemente im linken Teilgitter sollen zusammengefaßt werden.
4.6. DYNAMISCHE LASTVERTEILUNG
99
Falls eine Umverteilung vorzunehmen ist, berechnet diese Komponente anhand der vorliegenden Daten eine neue Zuordnung aller Grobgitterzellen auf
die Teilgitter (Prozessorzuweisung, vgl. Kap. 2.1.3). Die zweite Komponente
realisiert den Transfer der zu verschiebenden Gitterteile und zwar für jede
mögliche Zuordnung, die Funktionsweise der Algorithmen zum Transfer des
Gitters bedingt also keine Einschränkung an die Methodik zur Berechnung der
Neuverteilung.
4.6.1 Berechnung der Aufteilung des Grobgitters
Aufwandsmodell für das numerische Verfahren
Das Aufwandsmodell soll eine einfach zu berechnende Beziehung zwischen
dem Verfeinerungszustand des Gitters zu einem Zeitpunkt der Simulation und
dem Aufwand des Gesamtverfahrens im nachfolgenden Zeitschritt liefern.
Anhand des Aufwandsmodells soll es darüberhinaus möglich sein, die voraussichtliche Dauer (Laufzeit) der nachfolgenden Zeitschritte des numerischen
Verfahrens und der lokalen Gitterweitenanpassung auch für eine angenommene andere Aufteilung des Gitters abschätzen zu können, um dadurch Kosten
oder Gewinn einer dynamischen Lastverteilung zu erkennen.
Annahme: Der Aufwand, der im numerischen Verfahren auf allen Flächen
und Elementen entsteht, die durch die hierarchischen Navigationswege ausgehend von der selben Grobgitterzelle (Agglomerationseinheit) erreicht werden können, wird als proportional zur Anzahl der Blätter in der Elementhierarchie, die von dieser Grobgitterzelle erreicht werden können, angesehen (vgl.
Abb. 3.13).
Das vorgeschlagene Aufwandsmodell unterscheidet nicht zwischen flächenund elementbasierten Teilen des numerischen Verfahrens was innerhalb gewisser Grenzen zulässig ist, wie die folgende Abschätzung zeigt:
Behauptung: Für das beschriebene nichtkonforme Hexaedernetz und die
zugrunde gelegten Verfeinerungsregeln (vgl. Kap. 3.2) kann die Anzahl der
2 2
2 ÷2
feinsten inneren Flächen
bzw. Kanten
(Blätter der Hierarchie), die in und
an einem Grobgitterelement liegen, für eine große Verfeinerungstiefe durch die
2 ø~2
Anzahl der Blätter der Elementhierarchie
mit passenden Konstanten nach
oben und unten abgeschätzt werden. Eine ähnliche Abschätzung gilt auch für
2 2
die Anzahl der Knoten " :
ù
ù
r
r
2 ø~2ú
2 2ûú
2 ø~2ú
2 ÷2ýúaþ
2 ø~2ú
2
"
2ÿú
ù
ü
¨
2 ø~2
2 ø]2
r
r
2 ø~2
¦ ù
< r
Nü r 2 ø~2 < ü 2 ø~2
(4.2)
100
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
2
2 32 ø~2
Beweis: Betrachtet man zunächst das Verhältnis
von Flächen und
Elementen im Gitter, dann fällt auf, daß jede Fläche von einem oder von zwei
Elementen referenziert werden kann - entsprechend der lokalen Verfeinerungssituation.
Die kleinste Anzahl an Flächen erhält man, falls möglichst jede Fläche von
zwei Elementen referenziert wird. Dies entspricht einer gleichmäßigen Verfeinerung, alle Blätter der Elementhierarchie sind vom gleichen Verfeinerungsniveau (Breitenwachstum).
Wird die Betrachtung nun auf die an einem Grobgitterelement anliegenden Flächenbäume und die Flächen- sowie Elementbäume innerhalb dieses Elements
eingeschränkt (vgl. Abb. 3.13, 3.14) gelangt man auf folgende Gleichung für die
2 ø]2
2 2
Entwicklung der Anzahl an Elementen
und Flächen
nach einer weiteren
globalen Verfeinerung [GV [àn N :
2 ø~2
2 ø~2
l + N
2 2
þ
l +
2
2
&5'!)
+
&5'!)
¦
+
Für Folge der Quotienten
gilt offenbar
¥ l 2 2
r
ø
¥
2 ø~2
r
&
& n
¥
r
(4.3)
2 ø~2
& @
ù
þ
N
¥|n
(4.4)
Mit elementaren Überlegungen findet man, daß eine allgemeine iterierte Abbil
mit einem Startwert &%(' +*-) , auf
dung der Form "! für $#
eine monoton fallende Folge mit Grenzwert
.0/21
6
43 5
7
!
führt, woraus zusammen mit (4.4) das Verhältnis der Flächen- und Elementzahl
nach vielen Verfeinerungsschritten zu
2. /21
43 5
89
ø
9
7
ù
(4.5)
bestimmt werden kann. Ebenfalls anhand der Skizze (vgl. Abb. 3.14) können
÷:
und Knoten
die zu (4.3) analogen Vorschriften für die Anzahl der Kanten
;$
nach jedem weiteren Verfeinerungsschritt erstellt werden:
÷:
% ;
% ÷:
;$
<
4?
;
÷:
= >
÷:
þ
ø
ø
Mit (4.5) folgen durch sukzessives Auflösen die unteren Abschätzungen (linke
Seite) der Behauptung (4.2).
Um die oberen Abschätzungen nachzuprüfen, wird eine Situation konstruiert,
in der jede Fläche nur von genau einem Element referenziert wird. Dadurch
4.6. DYNAMISCHE LASTVERTEILUNG
101
entsteht pro Element die maximal mögliche Anzahl von Flächen. Eine solche
Verfeinerungsstruktur liegt beispielsweise vor, falls der Elementbaum in jedem
Schritt immer nur an einem seiner bereits am weitesten verfeinerten Blätter
fortgesetzt wird (Tiefenwachstum).
@
Wiederum zeigt die Skizze (vgl. Abb. 3.14), wie sich
teren Verfeinerung entwickeln:
@
%A
% FE
@
@
<
BDC
7
E HGI=J
G
und
mit jeder wei-
DK4L (4.6)
Die Gleichung für die Anzahl der Elemente ist klar, an der Stelle des groben
Hexaederelements entstehen acht neue: Die Gesamtzahl nimmt um sieben zu.
Die Situation bei den Flächen ist ähnlich: Alle sechs Außenflächen des groben
Hexaeders werden durch insgesamt 24 feine Flächen ersetzt, im Element ent @
stehen nochmals zwölf feine Flächen (vgl. Abb. 3.13).
und
entwickeln
sich proportional zur Tiefe der Verfeinerung. Für den Grenzwert findet man
@
0. /21
43 5
K4L
C
und damit die obere Abschätzung der ersten Gleichung aus (4.2). Abzählen
liefert ebenso die zu (4.6) korrespondierenden Ausdrücke für die Anzahl an
M"
;
Kanten
und Knoten
nach jedem weiteren Verfeinerungsschritt
M:
% G
;
%S
UT
M:
;
M"
N
;$
V
7H
GODG=PHGI=J EQ
;$
GP E V
M:
W
>=RG
Daraus folgen die übrigen oberen Abschätzungen aus (4.2).
X
Das vorgeschlagene Aufwandsmodell macht lediglich von den Abschätzungen
für die Anzahl der Flächen im Gitter Gebrauch, weil dort der Aufwand zur Berechnung der numerischen Flüsse lokalisiert ist.
Obwohl die Anzahl der feinsten Flächen im Gitter auch in jedem Schritt der
Verfeinerung durch eine direkte Zählung bestimmt werden kann, bietet die
Abschätzung (4.2) in der Praxis den Vorteil eines deutlich geringeren Aufwands. Die Abschätzung liefert die Anzahl der Flächen aus der bekannten
Anzahl der Elemente innerhalb eines Bereichs von Y 18 %, was sich im vorliegenden Fall als ausreichend genau erweist (vgl. Kap. 6).
Modellgraph für den Aufwand im numerischen Verfahren
Da die Verteilung des Gitters in Einheiten von Grobgitterzellen und deren Inhalt
an feinen Elementen, Flächen Kanten und Knoten erfolgen soll (Agglomeration, vgl. Kap. 4.1.1), besteht die Aufgabe darin, das Grobgitter so an die zur
Verfügung stehenden Prozessoren zuzuweisen, daß deren Belastung im numerischen Verfahren nahezu gleich ist (Prozessorzuweisung, vgl. Kap. 4.1.1).
102
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
Durch das einfache Aufwandsmodell (4.2) wird die Frage der Lastbewertung
beantwortet: Der Aufwand im numerischen Verfahren wird als proportional zur
Anzahl der Blätter in der Elementhierarchie angenommen, womit im Kriterium zur Steuerung der dynamischen Lastverteilung (2.12) die anteilige Laufzeit
Z ,[\[^]
_
, bei ausreichender Genauigkeit durch die bekannte anteilige Elementzahl
@ _
ersetzt werden kann:
16`acbed
]0fgihkjl
7
bnm 7"po b
7:qoro @tsu @ _v
d^w
[\[xhyj
@$
z{
2 (4.7)
Weiterhin soll die Aufteilung des Grobgitters den zusätzlichen Aufwand, der
aus Identifikation, verteilter Gitterweitenanpassung und Datentransfer im numerischen Verfahren besteht, möglichst klein halten.
Dieser Aufwand wird üblicherweise mit der Zahl der Schnittflächen“ im verteil”
ten Gitter verbunden. Für die vorliegende Problemstellung ist dieses Vorgehen
sogar exakt:
|
|
Auf den Flächen des Gitters, die zum inneren Rand gehören, die also Bestandteil mehrerer Teilgitter sind, wird der Fluß aufgrund des mehrfachen
Vorkommens der Fläche zweimal berechnet (vgl. Kap. 4.3).
|
Auf den Randelementen, die den inneren Rand gegenüber den mehrdeutigen Flächen darstellen, müssen die Interpolationsobjekte in jedem
Zeitschritt zwischen den Teilgittern ausgetauscht werden, woraus ein bestimmter Kommunikationsaufwand resultiert.
Der Aufwand des Identifikationsalgorithmus (vgl. Kap. 4.4.4) ist ebenfalls
proportional zur Anzahl der Flächen, Kanten und Knoten, die in mehreren
Teilgittern vorkommen.
Mit diesen Aufwandsbetrachtungen kann das Problem der Prozessorzuweisung in ein Partitionierungsproblem für einen ungerichteten gewichteten Graphen umformuliert werden (vgl. Abb. 4.12).
Definition: Es seien } , ~
9 b
}
o
nichtleere Mengen mit }$~u
U und
p
H
"} mit
v
v
Gt l
wobei die Kardinalität
der Menge angibt. Zusammen mit den Abbildunb
9 b o
o
gen Qi~
} , ~ und }F heißt }lr~6ly-lyl ein ungeb
o
richteter gewichteter Graph bzw. }lr~6lrlr . Dabei bezeichnet } die Menge
der Ecken des Graphen und ~ die Menge der Kanten von .
Um die bislang noch unscharf umschriebenen Ziele der Prozessorzuweisung
in ein berechenbares Kostenfunktional umwandeln zu können, wird zunächst
aus den bekannten Größen des hierarchischen Gitters und der Topologie des
unterliegenden Grobgitters nach den folgenden Vorschriften ein Graph erstellt:
4.6. DYNAMISCHE LASTVERTEILUNG
ω=13
θ=29
103
Jede Fläche des Grobgitters, die auf einem inneren Rand des Teilgitters
liegt, wird durch eine Kante VB~ im Graphen dargestellt, deren Geb o
wicht aus der Anzahl der feinsten Flächen im Baum über dieser
Grobgitterfläche mit einem passenden Faktor bestimmt wird.
Jedes Element des Grobgitters wird durch eine Ecke } im Graphen
b o
repräsentiert, deren Gewicht aus der Anzahl der feinsten Elemente
@
im Baum über diesem Grobgitterelement bestimmt wird.
Das im folgenden Abschnitt beschriebene Graphenabbildungsproblem bzw.
das einfachere Graphenpartitionierungsproblem sind zusammen mit diesem
Modell die geeignete Beschreibung des Problems der optimalen Verteilung der
Grobgittereinheiten auf die zur Verfügung stehenden Prozessoren.
Das Graphenpartitionierungsproblem
Mit der Darstellung des Grobgitters als Graph liegt ein Modell vor, das den Operationsinhalt und die Datenzusammenhänge in einer Form zusammenfaßt, für
die sich die Frage einer optimalen Aufteilung des Gitters, die einerseits eine
gleichmäßige Belastung der Prozessoren erzeugt und andererseits möglichst
θ=15
ω=7
ω=7
θ=29
θ=8
ω=4
ω=13
θ=15
Abbildung 4.12: Darstellung des Berechnungs- und Kommunikationsaufwands
für ein Gitter durch einen gewichteten Graphen. Die vier Grobgitterelemente erhalten als Gewichte die Anzahl der enthaltenen feinen Elemente, die Flächen jene
der enthaltenen feinen Flächen.
104
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
wenige Navigationspfade unterbricht, durch das abstrakte Graphenpartitionierungsproblem ausdrücken läßt:
b
o
Definition: Für einen ungerichteten gewichteten Graphen }lr~6lyl löst
7¡
die Abbildung :R}B L l 02 l das Graphenpartitionierungsproblem, falls
sie das Kostenfunktional
¢
£^¤¦¥ h¨§ hk©«ª­¬4®A¯­h¨§ hk©e¬4°
b o ±7V²x³ ¥ ³ ¥
hyª­§ hk©2ªy´
(4.8)
unter der Nebenbedingung
µ
z{
L l 02 l 7"
¶·
¢
¸ h¨¬4°c¹ ³ ¥ hkª ¤ _«º
b o7
¢
b o¼ ½
p
»
¾
hk© ¬4°
v
16`a
b o
h\¬4°
(4.9)
minimiert.
Wird mit der Modellgraph aus dem vorigen Abschnitt identifiziert, dann minimiert die Lösung des Graphenabbildungsproblems den Aufwand, der durch die
Datenzugriffe über Prozessorgrenzen hinweg entsteht (4.8), bei gleichzeitiger
ausgeglichener Verteilung des Aufwands im numerischen Verfahren (4.9).
Für das Graphenpartitionierungsproblem (4.8) und (4.9) läßt sich im allgemeinen, d.h. für allgemeines , kein Algorithmus angegeben, der mit polynomialem
Zeitaufwand eine Lösung berechnet. Der Aufwand einer vollständigen Suche
nimmt oft exponentiell mit der Größe }¿ des Graphen zu [13]. Da das Problem
aber in der Informatik und in der Nachrichtentechnik häufig auftritt, stehen effiziente Verfahren zur Approximation der optimalen Lösung oder zur Verbesserung einer bestehenden Graphenpartitionierung zur Verfügung [19, 30].
Graphenpartitionierung und dynamische Lastverteilung
Die Zerlegung eines Graphen im Sinne von (4.8) und (4.9) stellt ein diskretes
Optimierungsproblem dar, weshalb nicht erwartet werden darf, daß die Lösung,
die ein entsprechendes Verfahren liefert, stetig von Eingangsgrößen wie einzelnen Ecken- oder Kantengewichten des Graphen abhängt.
Ein weiteres Problem besteht darin, daß selbst die optimale Lösung des Graphenpartitionierungsproblems (4.8) und (4.9) noch mehrdeutig ist: Es bleibt die
Freiheit einer Permutation der Teilgebiete. In der Praxis zeigt sich häufig, daß
die erneute Anwendung des identischen Partitionierungsalgorithmus auf ein
Problem mit leicht modifizierten Ecken- oder Kantengewichten lediglich einige
Ecken zwischen den Partitionen verschiebt, darüberhinaus aber noch zu einer
globalen Permutation der Partitionsnummern führt.
Ausgehend von dieser Beobachtung wird vermutet, daß es in vielen Fällen ei7¡
7"
Á Ã und die
ne Permutation ÀB L l 02 l L l 22 le
gibt, für die gilt: À"ÂU
4.6. DYNAMISCHE LASTVERTEILUNG
105
nachfolgende Anwendung von À auf die vom verwendeten Partitionierungsalgorithmus bestimmte Zuweisung zu den Teilgebieten reduziert den Aufwand
beim Transfer der zu verschiebenden Teilgitter.
b
o
Im folgenden ist  }l~6lylr ein Modellgraph für ein Gitter bestehend
aus einer Menge von Ecken } und einer Menge ungerichteter Kanten ~ . Die
Ecken } sind fortlaufend numeriert von p% bis ¹ °Ä¹ *i . Außerdem sind für alle
b o
b o
Ecken des Graphen Gewichte Å _ unabhängig von _ vorgesehen, wobei
b _o
die einzelnen Werte Å später festgelegt werden.
Definition: Neupartitionierung des Graphen bedeutet den Übergang von
7
einer Abbildung £ }ÆÇ L l 22 le
auf eine neue (nachfolgende) Abbildung
"
7
+
£
È
t} L l 02 lÉ
, wobei die Anzahl der Partitionen im Schritt und É
diejenige im Schritt ist.
Dabei stellt sich die Frage nach den Kosten des nachfolgenden Lasttransfers,
in dessen Verlauf Teile des Gitters mit assoziierten Daten zwischen den Prozessen ausgetauscht werden müssen.
Aufwandsmodell für den Gittertransfer
Für die Elemente des Grobgitters ist die Frage, was transportiert werden muß,
durch die beiden Partitionierungsabbildungen £ und £+È beantwortet, bei der
Betrachtung der Flächen, Kanten und Knoten müssen aber bereits existierende
Kopien in den Zielgittern berücksichtigt werden (vgl. Kap. 4.2).
Mit den Abschätzungen (4.2) werden hier vereinfachend nur die Elementbewegungen berücksichtigt, im Modell des Graphen verursacht also nur die Verschiebung einer Ecke zu einer anderen Partition einen feststellbaren Aufwand.
Weiterhin sei die Anzahl der Partitionen vor und nach der Neuaufteilung identisch Â É .
{
Definition: Die Überdeckung Ê _ÌË der Partitionen (Teilgraphen)
und Í
bezüglich des Übergangs von £ auf £+È wird definiert als die Summe der
b o
b o
b o
Eckengewichte Å der zu verschiebenden Ecken pÎ$}V £ Â Á £+È :
b
o
Ê _Ë £ Ï £+È Â
¢
Å
I
³
Ó
¸ hЬ°ÒÑ
¥ hkª ¤ _ § ³IÓrÔtÕ ¥ hyª ¤ Ë\º
b o
(4.10)
Damit kann nun ein zunächst rein formales Kostenfunktional für den Lasttransfer konstruiert werden:
Definition: Kostenfunktional für den Gittertransfer.
d^Ö×ØÙb £
o
£+È Â
Ú
¢
ÛÝÜ Þß&àrá á âxã
Ûpå ä Þ
b
o
£+È Õ Ê _ÌË £ Ï
(4.11)
Damit das Kostenfunktional den Aufwand des Gittertransfers richtig beschreibt,
b o
müssen noch die Gewichte Å _ der Ecken im Modellgraphen entsprechend
106
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
angepaßt werden (vgl. Kap. 5.6). Ziel müßte es nun sein, dieses Kostenfunktional zum statischen Partitionierungsproblem hinzuzufügen und dadurch gleichzeitig die Dauer des Lasttransfers und der Kommunikation im numerischen Verfahren zu reduzieren. Das kann hier nicht erreicht werden, denn die Algorithmen zur statischen Graphenzerlegung stammen aus Bibliotheken und können
nicht geändert werden.
Es bleibt aber noch die angesprochene Möglichkeit, die Symmetrie des Partitionierungsergebnisses unter Permutation der Gebietsnummern zum Zweck
der Verbesserung des Partitionierungsergebnisses auszunutzen.
Ziel: Unter allen möglichen Permutationen ÀæÏçSlèÀéêë<ê der Index7F
menge ê Â L l 22 le
ist diejenige zu finden, die das folgende modifizierte
Kostenfunktional minimiert:
d^Ö×ØÙb
¢
o
£ Ú £+È 4ì¨À Â
ÛíÜ Þ4ß&àyá á â^ã
Ûå
ä î^ï Þeð
{­ó
b
o
Õ Ê _+ñ ¥ Ë ª £ Ï £+È Ïò
(4.12)
Der Raum, in dem die Lösung zu suchen ist, umfaßt alle ô möglichen Permutationen der Indexmenge. Die vollständige Suche kann daher selbst für eine moderate Zahl von Teilgebieten sehr aufwendig werden. Deshalb wird die exakte
Lösung des Optimierungsproblems vermieden und auf die folgende, einfache
Heuristik ausgewichen:
Algorithmus 4.3: Konstruktion einer Permutation À Ö Ø zur Reduktion des Aufwands im Gittertransfer.
£ 9
ê +§
"ê Â
% 9
ê +§ Â
ê , Â
solange
finde
setze
setze
Â
L l 20 l 7"
z
Â
L l 20 l 7"
L
$#$
Ó
Ó
{
Õ
l­ÍõöÊ Ì_ Ë Â
ò R÷ Ý] ¬4ø § ùS¬4ø ú Ê¿] £
b{ o Â
À Ö Ø
Í
9 £+È £+È {
Â ê £
Â
ê und ê
û
ê
9£
û +Í
ü
Bemerkung: Der angegebene Algorithmus kann offenbar mit einem Aufwand, der linear mit der Anzahl der Teilgebiete zunimmt, implementiert werden.
ý
4.6.2 Umverteilung des Gitters
Der verteilte Entwurf des parallelen Verfahrens bedingt, daß Teile des Gitters
immer wieder von Partition zu Partition bewegt werden, um eine möglichst
gleichmäßige Belastung der einzelnen Prozesse zu erreichen.
4.6. DYNAMISCHE LASTVERTEILUNG
107
Die beschriebene Strategie, eine Umverteilung nur auf dem Niveau des Grobgitters vorzunehmen (vgl. Kap. 4.1.1), wirkt sich günstig auf den Entwurf des
Moduls zum Gittertransfer aus, er kann geradlinig aus den Komponenten der
seriellen Gitterverwaltung weitergeführt werden. Dies ist vor allem deshalb
günstig weil die Komponente zur Umverteilung des Gitters erfahrungsgemäß
wohl die am schwierigsten zu realisierende sein dürfte. Die Gründe dafür sind
im wesentlichen, daß (scheinbar) kein Gegenstück dazu im Entwurf für das sequentielle Simulationsprogramm vorliegt und die Lastverteilung dennoch massive Eingriffe in den grundlegenden Datenbestand des Gitters vornehmen soll.
Das ist erfreulicherweise nur scheinbar der Fall: Genau wie die lokale Gitterweitenanpassung hat auch die dynamische Lastverteilung ihre Grundlagen im seriellen Entwurf, zumindest an den Stellen, an denen sie das Gitter direkt manipulieren muß. Es handelt sich dabei um das Modul zum Aufbau des Grobgitters
(vgl. Kap. 3.2.6, 5.2) und die Methoden zur Sicherung und Wiederherstellung
des hierarchischen Gitterzustands (Verfeinerungssituation) aus entsprechenden Dateien bzw. Datenströmen (vgl. Kap. 3.13, 5.2).
Verteiltes Gitter (Interface)
1
1
1
Verteiltes Grobgitter
Grobgitter (Project)
Instantiierung
Konkretes verteiltes Gitter (Director)
Konkretes Verteiltes
Grobgitter (Factory)
mg : Konkretes Verteiltes Grobgitter &
Erbauer (Builder)
Instantiierung
0...N
Instantiierung
1
0...N
0...N
HexaederGeometriesockel
ParallelErweiterungIF
ParallelErweiterungIF
restore(Datenstrom
(Datenstrom&)
&)
restore
Erbauer für Teilgitter
1
Konkretes
KonkretesHexaederelement
Hexaederelement
außen : Map < 4−PolygonRand * >
innen : Map < 4−PolygonRand * >
1
KonkreteParallelerweiterung
Parallelerweiterung**
ee: :Konkrete
Instantiierung
hexaederEinfügen (Datenstrom &)
4−PolygonEinfügen (Datenstrom &)
kanteEinfügen (Datenstrom &)
knotenEinfügen (Datenstrom &)
1
KonkreteParallelerweiterung
Parallelerweiterung
Konkrete
KonkretesHexaederelement
hh: :KonkretesHexaederelement
restore(Datenstrom
(Datenstrom&)
&)
restore
Abbildung 4.13: Ausdehnung der Builder-Klasse für das Grobgitter aus dem Basisentwurf durch Vererbung. Das Schema des Zusammenwirkens der drei Module
beim Aufbau des Grobgitters bleibt unverändert erhalten (vgl. Abb. 3.15).
108
KAPITEL 4. DAS PARALLELE SIMULATIONSPROGRAMM
Der objektorientierte Ansatz bleibt auch im Fall der dynamischen Lastverteilung erhalten, d.h. es wird nicht von außen in die Integrität des Teilgitters eingegriffen. Der Erbauer (Builder) des Grobgitters für ein verteiltes Gitter bietet gegenüber dem konkreten verteilten Gitter die selbe Schnittstelle an, wie
sein Äquivalent für das Monogitter im Basisentwurf. Genaugenommen werden
die bestehenden Möglichkeiten durch Vererbung übernommen und an einigen
Stellen in das verteilte Konzept hinein erweitert (vgl. Abb. 4.13).
Das Modul zur dynamischen Umverteilung des Grobgitters kann auf diese Art
recht einfach realisiert werden: Die codierten Grobgitterdaten werden wie im
Basisentwurf in entsprechende Datenströme geschrieben, die jedoch nicht mit
Dateien, sondern mit den Builder-Objekten auf dem Zielgitter verbunden sind.
Der einzige Unterschied zum Basisentwurf taucht beim Heraustrennen eines
Elements aus dem Gitterverband auf: Falls eine Fläche der Elementberandung
auf dem inneren Rand des verteilten Gitters liegt, müssen hier die zugehörigen
Randelemente angelegt werden (vgl. Kap. 4.2,4.3).
109
Kapitel 5
Dokumentation zur
Implementierung
Hinweise zur Darstellung
Jeder Abschnitt enthält zusätzlich zu den Erklärungen eine Aufstellung aller
Dateien, auf die das betreffende Modul bzw. Paket in der Implementierung verteilt ist. Dies soll zusammen mit dem Index (vgl. Anh. C) eine schnelle Zuordnung der Quelldateien ermöglichen.
Dabei macht das Symbol in der ersten Spalte der Tabelle deutlich, welche Teile
der Implementierung die betreffenden Datei enthält:
.h
Deklarationsdateien
.h
Deklarationspaket
.cc
Definitionsdateien
Die Unterteilung in Deklarations- und Definitionsdateien geht bereits auf Eigenschaften der Programmiersprache C++ [29] ein, wogegen die Paketdefinitionen
nicht strikt im Sinne der UML [7] auszulegen sind: Oftmals handelt es sich nur
um eine Sammlung inhaltlich zusammengehöriger Klassen, die eventuell in einem eigenen Namensraum enthalten sind.
5.1 Adaptives Gitter
Die Darstellung der geometrischen Objekte des Gitters, also der Elemente,
Flächen, Kanten und Knoten mit den Mitteln der Programmiersprache C++ folgt
110
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
dem vorgestellten Entwurf (vgl. Kap. 3.2): Die drei Schichten Iterationsschnittstellen, Geometriesockelklassen und Implementierungsschicht finden sich bis
auf Details mit technischem Charakter im Programmcode wieder.
Zusätzlich enthalten die Iterationsschnittstellen weitere Basisklassen, mit deren Hilfe die Integration des numerischen Verfahrens und die Erweiterung auf
ein verteiltes Gitter erreicht werden kann, wobei diejenigen Klassen, die Gegenstand eventueller Ergänzungen sein können, grau dargestellt sind (vgl.
Abb. 5.1-5.4).
Neben dem Daten- und Funktionsinhalt sind auch die Dateien so gruppiert, daß
eine gute Trennung zwischen dem Basispaket, ausreichend für die seriellen
(nicht verteilten) Anwendungen, und dem Ergänzungspaket (vgl. Kap. 5.1.2)
für die Unterstützung paralleler (verteilter) Anwendungen erreicht wird.
5.1.1 Gitterdatenstrukturen und Basisalgorithmen
Aufteilung des Pakets:
Datei
Kurzbeschreibung
gitter sti.h
Paket mit den Iterationsschnittstellen für Element,
Randelement, Fläche, Kante, Knoten, Grobgitterbehälter und Gitterverwaltung, den Geometriesockelklassen für Hexaeder, 4-Polygon und 4-Polygonrandelement sowie der Konstruktionsschnittstelle des Grobgitterbeh älters (vgl. Kap. 3.3).
.cc
gitter sti.cc
Alle Methodendefinitionen, die auf den Iterationsschnittstellen aufgesetzt werden können: Erzeugung der Baumiteratoren, Backup/Restore, Verfeinerung/Vergröberung.
.cc
gitter geo.cc
Alle Methodendefinitionen, die auf den Geometriesockelklassen aufgebaut werden können: Integritätstest auf den Elementen und die Methoden
auf der Konstruktionsschnittstelle des Grobgitters.
.h
gitter impl.h
Klassendefinitionen für leere Gitterteile, wenn keine speziellen Implementierungen benötigt werden.
Alle Operationen sind in der Deklarationsdatei definiert (inline), weshalb keine weitere Definitionsdatei vorliegt.
.h .cc
gitter mgb.h/.cc
Konstruktion des Grobgitters (vgl. Kap., 3.2.6): Definition der Konstruktionsobjekte mit assoziativen
Behältern, die das Grobgitter aus den Geometriesockelklassen aufbauen können.
.h
5.1. ADAPTIVES GITTER
.h
gitter hexa top.h
111
Schablonenklassen zur Ausprägung von Hexaedern, 4-Polygonrändern, 4-Polygonen und Kanten mit den entsprechenden Verfeinerungsoperationen aus den Implementierungen in gitter impl.h
oder aus eigenen Klassen, die sich von den Geometriesockelklassen ableiten.
Erweiterungen
Die Datenstrukturen sind sehr flexibel und lassen eine Erweiterung des numerischen Algorithmus ohne aufwendige redundante Neucodierung zu. Insbesondere liegt eine sehr einfache Situation vor, falls die vorhandenen Elementtypen
(Hexaeder, Vierecksfläche) sowie die isotropen Verfeinerungsregeln beibehalten werden.
Zweiteiliges Konzept: Die Datenstruktur der Elemente, Flächen, Randelemente und Kanten zerfällt in zwei Teile, wodurch es zusammen mit dem Typkonzept gelingt, die Konsistenz und Erfüllung der geometrischen Relationen
abzusichern und trotzdem flexible Verhältnisse für die Entwicklung zu erzielen.
Prinzipiell handelt es sich um eine Sockel-Deckel Konstruktion:
Die Geometriesockelklassen in der Datei gitter sti.h (vgl. Kap. 3.3) enthalten sämtliche Voraussetzungen (Methoden) zur Navigation längs der
geometrischen Zusammenhänge (vgl. Kap. 3.2). Darüber hinaus besteht
ein abstrakter Zugang zu den lokalen Methoden der Gitterweitenanpassung: Es können Markierungen gesetzt und gelesen werden. Auf Gitterobjekten, die keine Blätter der Hierarchie sind, kann auf die inneren
Komponenten nach einem festen Prototypen zugegriffen werden (vgl.
Kap. 3.2.5).
Mit den Schablonenklassen aus der Datei gitter hexa top.h können konkrete Implementierungen der Elemente, Flächen und Kanten erzeugt
werden, die alle abstrakten Methoden zur Navigation und Gitterweitenanpassung aus den Geometriesockelklassen ausfüllen. Diese Schablonenklassen stellen die Abschlüsse“ (Deckel) für eine eigene Implementie”
rung dar.
Die Klassen der geometrischen Gitterobjekte sind also an der Stelle aufgeschnitten, an der die Anforderungen eines numerischen Verfahrens von der
Basisklasse (Geometriesockelklasse) bereits vollständig erfüllt sind.
Der Nutzen dieser Lösung besteht in einer sehr sicheren und schnellen Vorgehensweise falls neue Klassen für die geometrischen Objekte mit erweiterten
Eigenschaften erstellt werden sollen. Im wesentlichen wird man dabei in vier
logischen Schritten vorgehen:
112
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
1. Einrichten der Schnittstellenmethoden in den Iterationsschnittstellen der
erweiterten bzw. geänderten geometrischen Gitterbestandteile. Die Iterationsschnittstellen sind nach der Dimension der davon abgeleiteten geometrischen Objekte geordnet (vgl. Kap. 3.3).
2. Realisierung des numerischen Verfahrens mit den in den Geometriesockelklassen enthaltenen Möglichkeiten zur Navigation längs der geometrischen Beziehungen und zum Zugriff auf die Verfeinerungsinformation. Die neu zu schaffenden Klassen werden also zweckmäßigerweise
von den Geometriesockelklassen oder bestehenden Implementierungen,
die weiterverwendet werden sollen, abgeleitet. Diese Klassen sind jetzt
noch abstrakt und können nicht instantiiert werden.
3. Ausprägen der Schablonen aus gitter hexa top.h mit den in Punkt 2 beschriebenen Implementierungen liefert instantiierbare Klassen mit dem
gewünschten Verhalten unter Verfeinerungsanforderungen. Die Klasse
des Grobgitterbehälters ist abzuleiten, damit die Virtuellen Konstruktoren
(factory methods) [12] zur Bereitstellung der Elemente, Flächen, Kanten
und Knoten für das Grobgitter überschrieben werden können.
4. Der neu geschaffene Grobgitterbehälter muß in einem abgeleiteten Gitter denjenigen, der vom Basisklassengitter (vgl. gitter impl.h ) verwendet
wird, überdecken (vgl. Kap. 3.2.1, Abb. 3.5).
Die Klassendiagramme (vgl. Abb. 5.2-5.4) geben einen Überblick über
die Schnittstellenhierarchie der geometrischen Objekte und die Navigationsmöglichkeiten entlang der geometrischen Relationen (vgl. Kap. 3.2).
Hinweis: Falls zusätzliche Elementtypen wie Tetraeder, Prismen oder Pyramiden in die Implementierung eingefügt werden sollen, muß der Satz der Geometriesockelklassen (gitter sti.h) und Schablonen (gitter hexa top.h) um die
entsprechenden Klassen ergänzt werden. Die Erläuterungen dazu gehen jeý
doch über den Rahmen dieser Dokumentation hinaus.
5.1. ADAPTIVES GITTER
113
Parallelerweiterung
Anwendungsschnittstelle
Iterationszugriff
0...N
Gitter
Knoten
level : Int
level () : Int
punkt () : Real [3]
Zugriff auf die Geometrieinformation
2
1..N
KnotenGeometrieSockel
KanteGeometrieSockel
coordinaten : Real [3]
punkt () : Real [3]
schlüssel () : Int
Vertexmplementierung
Abbildung 5.1: Klassen- und Schnittstellenhierarchie der Knoten. Die Klasse Vertex ist von den Iterationsmethoden aus sichtbar, die Geometriesockelklasse nur
ausgehend von den assoziierten Objekten der Geometriesockelklasse der Kante
(vgl. Kap. 3.3, Abb. 3.16).
Parallelerweiterung
Anwendungsschnittstelle
Iterationszugriff
0...N
Kante
Gitter
bool istBlatt ()
int level ()
kinderIteration () : Kante*
innereKnotenIteration () : Knoten *
Zugriff auf die Geometrieinformation
2
KnotenGeometrieSockel
1..N
4
KanteGeometrieSockel
1..N
4−PolygonGeometrieSockel
knoten : VertexGeometrieSockel (*) [2]
knoten (i : Int) : KnotenGeometrieSockel *
kindKante (i : Int) : KanteGeometrieSockel *
KanteImplementierung
Abbildung 5.2: Klassen- und Schnittstellenhierarchie der Kanten. Eingezeichnet
sind die Navigationsmöglichkeiten in Richtung absteigender Dimension, hier also
Fläche-Kante-Knoten.
114
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
Parallelerweiterung
Anwendungsschnittstelle
Iterationszugriff
0...N
Fläche
Gitter
bool istBlatt ()
int level ()
kinder () : Fläche *
innereKanten () : Kante *
innereKnotenIteration () : Knoten *
Zugriff auf die Geometrieinformation
4 1..N
6
KanteGeometrieSockel
1,2
4−PolygonGeometrieSockel
HexaederGeometrieSockel
kanten : KanteGeometrieSockel (*) [4]
orientierung : Int [4]
kante (i : Int) : KanteGeometrieSockel *
knoten (i : Int) : VertexGeometrieSockel *
knoten (i : Int,j : Int) : KnotenGeometrieSockel *
kindFläche (i : Int) : KanteGeometrieSockel *
4−PolygonImplementierung
Abbildung 5.3: Klassen- und Schnittstellenhierarchie der Flächen. Die Navigationsmöglichkeit entlang der geometrischen Nachbarschaftsbeziehung ist in
Abb. 5.4 eingetragen.
Parallelerweiterung
Anwendungsschnittstelle
Iterationszugriff
2
4−PolygonVerbinder
2
6
4−PolygonGeometrieSockel
0...N
Element
Gitter
bool istBlatt ()
int level ()
kinder () : Element *
innereFlächen () : Fläche *
innereKanten () : Kante *
innereKnoten () : Knoten *
verfeinern ()
2
HexaederGeometrieSockel
außenflächen : 4-PolygonGeometrie *
drehung : Int
fläche (i : Int) : 4-PolygonGeometrieSockel *
knoten (i : Int) : KnotenGeometrieSockel *
knoten (i : Int, j: Int) : KnotenGeometrieSockel *
kindHexaeder (i : Int) : HexaederGeometrieSockel *
HexaederImplementierung
Abbildung 5.4: Klassen- und Schnittstellenhierarchie der Elemente. Die Schnittstelle 4-PolygonVerbinder realisiert das geometrische Nachbarschaftskonzept
(vgl. Kap. 3.2.3).
5.1. ADAPTIVES GITTER
115
5.1.2 Das verteilte Gitter
Die Strategie zur Aufteilung des Gitters auf mehrere Teilgitter folgt dem Entwurf
des verteilten Gitters (vgl. Kap. 4.1.1).
Um die Quelldateien des Basisentwurfs von den Erweiterungen, die für die
verteilte Gitterverwaltung bestehen, zu entkoppeln, sind die Schnittstellen der
für das verteilte Gitter ausgerüsteten Elemente, Flächen, Kanten und Randelemente nur über ein Methodenpaar in der Iterationsschnittstelle dieser Typen
erreichbar (versteckt). Auf diese Art sind die Schnittstellenklassen der Komponenten des verteilten Gitters in den Deklarationsdateien des Basisentwurfs
nur namentlich, nicht jedoch inhaltlich bekannt. Die Gitterobjekte für das verteilte Gitter enthalten eine Komponente (Erweiterung), die für die Realisierung
der Methoden, wie sie von der verteilten Gitterverwaltung benötigt werden, mit
Daten und einer Referenz auf das umgebende Gitterobjekt ausgestattet ist.
Aus praktischen Gründen folgen die Schnittstellenklassen der Erweiterungen
für die parallele Gitterverwaltung dem Konzept der fetten Schnittstellen [29]:
So findet beispielsweise keine Unterscheidung zwischen Element- und Randelementerweiterung statt. Das relativ strikte Typkonzept aus dem Basisentwurf
weicht an dieser Stelle bedauerlicherweise etwas auf.
Aufteilung des Pakets:
Datei
Kurzbeschreibung
.h
parallel.h
Deklaration der Methoden in den Iterationsschnittstellen, die den Zugriff auf die Schnittstellen der
(parallelen) Erweiterungen für die Gitterobjekte
vermitteln.
Auf diese Art bleibt der Methodeninhalt der Erweiterungen für das verteilte Gitter im Basisentwurf
unsichtbar.
.h
gitter pll sti.h
Paket mit den Basisklassen und Schnittstellen für
das verteilte Gitter (vgl. gitter sti.h).
Definition der Schnittstellen der parallelen Erweiterungen, die in den Elementen, Flächen, Kanten bzw. Knoten eingebaut sind. Der Zugriff geschieht indirekt über die Iterationsschnittstellen
(gitter sti.h).
gitter pll sti.cc
Definition aller Methoden, die bereits mit den
Schnittstellen der Parallelerweiterungen der Elemente, Flächen, Kanten und Knoten realisiert werden können. Ebenfalls enthalten sind alle auf die
Situation eines verteilten Gitters ausgedehnten
Basisalgorithmen aus gitter sti.cc und die Methoden zur Konstruktion der geteilten (identifizierten)
Iterationsobjekte (vgl. Kap. 4.4.1).
.cc
116
.h .cc
.cc
.h
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
gitter pll impl.h/.cc
Klassendefinitionen für die Basisimplementierungen der Erweiterungsobjekte zu den (Grobgitter-)
Knoten, Kanten, Flächen, Elemente und Randelemente für das verteilte leere“ Gitter ohne Daten
”
und Methoden, die über die Notwendigkeiten der
Gitterverwaltung bzw. -darstellung hinausgehen.
gitter pll idn.cc
Alle Funktionenschablonen und Methoden zur
Identifikation des verteilten Grobgitters (vgl.
Kap. 4.4). Die Identifikation der Elemente,
Flächen, Kanten und Knoten unterscheidet sich
nur hinsichtlich ihrer Schlüssellänge und kann
daher durch die mehrfache Ausprägung einer
Funktionsschablone realisiert werden.
gitter hexa top pll.h
Schablonen zum Übernehmen von Randelementimplementierungen aus dem seriellen in das verteilte Gitterkonzept (Adapterklassen).
Diese Form der Implementierung trägt dem
Umstand Rechnung, daß üblicherweise verhältnismäßig viele unterschiedliche Realisierungen
von Randelementen, den Bedürfnissen des numerischen Verfahrens folgend, vom sequentiellen in
das verteilte Verfahren übernommen werden sollen.
Erweiterungen
Der Einbau weiterer Methoden (eines numerischen Verfahrens) in die Klassen
der Elemente, Flächen, Kanten oder Knoten im verteilten Gitter ist zunächst
völlig identisch zum Vorgehen für die Erweiterung der Klassen aus dem Basispaket (vgl. Kap. 5.1.1).
Zusätzlich muß den Anforderungen an die neu geschaffenen Elemente,
Flächen, Kanten, Knoten oder Randelemente in Bezug auf Datenaustausch
und dynamische Lastverteilung Rechnung getragen werden. Dies geschieht
durch das Überschreiben einiger Methoden in den parallelen Erweiterungen
der betreffenden Gitterobjekte. Darauf kann hier nicht eingegangen werden.
5.2 Sicherung und Wiederherstellung
Die Sicherung bzw. Wiederherstellung des Grobgitters sowie des aktuellen
Verfeinerungszustands ist nicht nur für den Programmstart/-neustart bedeutend, sondern auch für die dynamische Lastverteilung, die Teile des Gitters
zwischen den verschiedenen Prozessen bewegt.
5.2. SICHERUNG UND WIEDERHERSTELLUNG
117
5.2.1 Grobgitter
Die Wiederherstellung bzw. Konstruktion des Grobgitters nach dem in einer
Datei gesicherten Zustand wird vom Modul zum Auf- und Umbau des Grobgitters übernommen (vgl. Kap. 3.2.6). Dessen sinnvolle Funktionsausdehnung
in einem verteilten adaptiven Gitter besteht in der Unterstützung des Transfers
der Grobgitterelemente zwischen Teilgittern für die dynamische Lastverteilung
(vgl. Kap. 4.6.2).
Aufteilung des Pakets:
Datei
.h .cc
.cc
Kurzbeschreibung
gitter mgb.h/.cc
Konstruktion des Grobgitters (vgl. Kap. 3.2.6,
5.1.1).
gitter geo.cc
Modul zur Sicherung des Grobgitters in eine Datei nach dessen Änderung im Verlauf der dynamischen Lastverteilung.
5.2.2 Verfeinerungsstruktur
Die Sicherung und Wiederherstellung (Backup/Restore) der Verfeinerungsstruktur des Gitters geschieht durch die Gitterobjekte selbst, denn dort sind die
Verfeinerungsregeln bekannt. Das Vorgehen ist möglichst einfach: Die Verfeinerungsregeln werden für jeden Teilbaum der Kanten-, Flächen- und Elementhierarchie so gespeichert, daß der Teilbaum daraus umgekehrt wieder durch
fortgesetzte Verfeinerung neu erzeugt werden kann.
Auch die Methoden zur Sicherung- und Wiederherstellung des Verfeinerungszustands stehen im Sinne der kooperativen Aufteilung dem Modul zum Gittertransfer zur Verfügung, um mit dem Grobgitterelement auch die Verfeinerungsinformation zwischen Teilgittern verschieben zu können.
Aufteilung des Pakets:
Datei
.h
.cc
Kurzbeschreibung
gitter sti.h
Schnittstellendefinitionen für die Eintrittspunkte
der rekursiven Backup- und Restoremethoden in
die Teilbäume der Element-, Flächen- und Kantenhierarchie.
gitter sti.cc
Methoden zum Sichern der Verfeinerungssituation und zur Wiederherstellung des Gitters aus der
Verfeinerungsinformation. Diese Methoden greifen
nur auf Schnittstellen zu, die vom konkreten geometrischen Typ unabhängig sind.
118
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
.cc
gitter pll sti.cc
Parallele Erweiterung des Backup/Restore Basiskonzepts aus gitter sti.cc zur Erzeugung verschiedener durchnumerierter Dateinamen.
.cc
gitter euler impl.cc
Erweiterung des Backup/Restore Basiskonzepts
für das numerische Verfahren: Die elementresidenten Daten und die Zeit werden ebenfalls gesichert bzw. wiederhergestellt.
.cc
gitter euler pll impl.cc
Erweiterung des Backup/Restore Konzepts für das
serielle numerische Verfahren auf die parallele Situation durch die Erzeugung verschiedener Dateinamen.
5.3 Numerisches Verfahren
Für das numerische Verfahren wird gezeigt, wie eine Integration in den bestehenden Entwurf von Gitterdatenstrukturen und Basisalgorithmen aussehen
kann (vgl. Kap. 3.4). Die anschließende Ausdehnung auf ein verteiltes Gitter
benötigt keine umfangreiche Ergänzung des Daten- bzw. Methodeninhalts der
verschiedenen Klassen sondern lediglich eine weitere Implementierung des
Randelements für den inneren Rand (vgl. Kap. 4.3).
Um die Komponenten des numerischen Verfahrens zu entflechten und deren
Verwendung in anderem Zusammenhang zu erleichtern, ist das Paket an dieser Stelle aufgeteilt in einen Teil mit spezifischen Datenstrukturen für das explizite Finite Volumen Verfahren (1.12) und einen Teil, der Integrationsformeln,
Referenzabbildungen und allgemeine Hilfsmittel für eine größere Klassen von
numerischen Verfahren enthält.
HexaederEulerImplementierung
4-PolygonEulerImplementierung
4−PolygonRandImplementierungEuler
2
Interpolation
Instantiierung
operator () (kartenpunkt : Real [2]) : Vec5
Linkes und rechtes
Interpolationsobjekt
zur Flussberechnung
InterpolationOrdnung0
InterpolationOrdnung1
operator () (kartenpunkt : Real [2]) : Vec5
operator () (kartenpunkt : Real [2]) : Vec5
base : Vec5
koeffizienten : Vec5 [4]
Abbildung 5.5: Schnittstelle und Implementierung der Interpolationsobjekte. Der
Funktionsaufrufoperator liefert mit der Stützstelle in lokalen Koordinaten den
Wert der Erhaltungsgrößen an dieser Stelle. Die Implementierungen unterscheiden sich hinsichtlich der Ordnung des Interpolationspolynoms.
5.3. NUMERISCHES VERFAHREN
119
5.3.1 Kompressible Euler-Gleichungen
Das Paket faßt alle Deklarationen und Definitionen zusammen, die Bestandteile des expliziten Finite Volumen Verfahrens für die kompressiblen EulerGleichungen in drei Raumdimensionen enthalten.
Aufteilung des Pakets:
Dateiname
Kurzbeschreibung
euler.h/.cc
Paket mit Klassendefinitionen für die Elementdaten, den Erhaltungsvektor und die Interpolationsobjekte nullter und erster Ordnung (vgl. Kap. 3.4,
Abb. 3.17).
Schablonen zur Erzeugung der Randbehandlung,
und zum Anschluß der numerischen Flüsse an die
Integrationsobjekte.
swflux.cc
Prozeduren mit ANSI-C Schnittstellen zur Berechnung der Flußfunktion nach Steger und Warming
(vgl. Kap. 1.2.3) [34, 42].
.h
gitter sti.h
Abstrakte Definitionen für die Methoden in den
Schnittstellen und Geometriesockelklassen, die
für die Methodenauflösung bei der Berechnung
der numerischen Flüsse benötigt werden (vgl.
Kap. 3.4).
.h .cc
gitter euler impl.h
Klassendefinitionen aller Gitterkomponenten, die
für das numerische Verfahren erweitert sind: Ein
Hexaeder mit Dateninhalt und Methoden zur Interpolation und Restriktion (1.28),(1.29) bei Verfeinerung bzw. Vergröberung, eine Vierecksfläche
mit Methoden zur Berechnung der numerischen
Flüsse und Randelementimplementierungen zur
korrekten Behandlung der Randbedingungen (vgl.
Kap.1.2.4, 3.4, Abb. 3.20).
gitter euler impl.cc
Implementierung der Methoden des für das numerische Verfahren erweiterten Gitters: Zeitschrittberechnung, Bestimmung des Verfeinerungskriteriums und Sicherung bzw. Wiederherstellung der
Elementdaten (Erhaltungsvektor).
gitter euler pll impl.h
Klassen, die eine Behandlung der inneren Ränder
des verteilten Gitters ermöglichen (vgl. Kap. 4.3).
Diese Randelemente verhalten sich auch bei Verfeinerung und Vergröberung bzgl. Interpolation
(1.28) bzw. Restriktion (1.29) im Sinne des numerischen Verfahrens korrekt.
.h .cc
.cc
.cc
.h
120
.cc
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
gitter euler pll impl.cc
Erweiterung des Zeitschrittverfahrens auf das verteilte parallele Gitterkonzept mit zusätzlichem globalem Abgleich der Zeitschrittweite und einer Methode für den Datenaustausch zwischen den Zeitschritten (vgl.Kap. 4.3).
5.3.2 Integrationsformeln
Das Paket enthält zwei parametrisierbare Klassen, die zur Volumen- bzw.
Oberflächenintegration auf Hexaederelementen mit verschiedener Ordnung
eingesetzt werden können (vgl. Kap. 3.4.2).
Weiterhin stehen Klassen mit Implementierungen der Referenzabbildung vom
Einheitswürfel in einen verformten Hexaeder mit geraden Kanten (trilinearer
Ansatz) und vom Einheitsquadrat in eine Außenfläche dieses Elements (bilinearer Ansatz) zur Verfügung (3.10).
Aufteilung des Pakets:
Dateiname
.h
.cc
Kurzbeschreibung
mapp cube 3d.h
Parametrisierbare Klassen mit Integrationsmethoden für den Einheitswürfel und dessen Oberflächen sowie Klassen zur Beschreibung der trilinearen und bilinearen Referenzabbildung.
mapp cube 3d.cc
Definition der konstanten Klassenvariablen für die
Integrationsstützstellen und -gewichte sowie der
umfangreicheren Operationen.
Hinweis: Die Berechnung der numerischen Flußfunktion stellt ein Zusammenspiel aus der konkreten Implementierung der numerischen Flußfunktion,
den Festlegungen für die Parametrisierungen der Zellgrenzflächen und deren
Parametergebieten, den konkreten Interpolationsobjekten für die verschiedenen Approximationsordungen und den Integrationsformeln dar.
Viele Klassen (euler.h) sind als Schablonen formuliert, damit die entsprechenden Berechnungsformeln für die numerische Flußfunktion baukastenartig zusammengestellt werden können (vgl. Kap. 3.4, Abb. 3.17).
þ
5.3. NUMERISCHES VERFAHREN
121
VolumenBerechnung
<< utility >>
QuadraturWürfel3DBasis
Argumenttyp − : arg_t
Werttyp Real : val_t
operator () (Weltpunkt : Real [3], \
Kartenpunkt : Real [3], Argument : arg_t) : val_t
Stützstellen : Real
Gewichte : Real
i : Integrationsobjekt
TrilineareReferenzAbbildungWürfel
QuadraturWürfel3D
1
1
typedef arg_t
typedef val_t
determinanteBerechnen () : Real
abbilden (Kartenpunkt : Real [3], Weltpunkt : Real [3])
invertieren (Weltpunkt : Real [3], Kartenpunkt : Real [3])
integrieren2 (a : arg_t) : val_t
integrieren3 (a : arg_t) : val_t
Würfeleckpunkte : Real [3]
Koeffizienten : Real [8][3]
map : Referenzabbildung
Abbildung 5.6: Parametrisierbare Klasse mit Integrationsformeln für den Einheitswürfel. Zur Konstruktion wird eine entsprechende Referenzabbildung
benötigt. Die Ausprägung mit der Klasse VolumenBerechnung liefert Formeln zur
Volumenintegration.
OberflächenBerechnung
<< utility >>
QuadraturRechtecksflächeBasis
Argumenttyp − : arg_t
Werttyp Real : val_t
operator () (Kartenpunkt : Real [2], \
Normale : Real [3], Argument : arg_t) : val_t
Stützstellen : Real
Gewichte : Real
i : Integrationsobjekt
QuadraturRechtecksfläche
typedef arg_t
typedef val_t
integrieren (a : arg_t, Auflösung : Int) : val_t
integrieren1 (a : arg_t) : val_t
integrieren3 (a : arg_t) : val_t
BilineareReferenzAbbildungOberfläche
1
1
abbilden (Kartenpunkt : Real [2], Weltpunkt : Real [3])
invertieren (Weltpunkt : Real [3], Kartenpunkt : Real [2])
normale (Kartenpunkt : Real [2], Normale : Real [3])
Flächeneckpunkte : Real [3]
AbbildungsKoeffizienten : Real [4][3]
NormalenKoeffizienten : Real [3][3]
map : Referenzabbildung
Abbildung 5.7: Parametrisierbare Klasse mit Integrationsformeln für die das
Einheitsquadrat. Zur Konstruktion wird eine entsprechende Referenzabbildung
benötigt. Die Ausprägung mit der Klasse OberflächenBerechnung liefert Formeln
zur Oberflächenintegration.
122
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
5.4 Identifikation
Die Identifikationsrelationen für die Knoten, Kanten und Flächen des Grobgitters werden nach dessen Veränderung neu berechnet und in passenden Datenstrukturen gespeichert (vgl. Kap. 4.4).
Demgegenüber entsteht die Identifikation der Knoten, Kanten und Flächen innerhalb der Gitterhierarchie durch deren globale Ausrichtung und adäquate
Iterationsklassen (vgl. Kap. 5.7).
Aufteilung des Pakets:
Dateiname
Kurzbeschreibung
.h
key.h
Klassendefinitionen für die zur Identifikation der
Grobgitterobjekte verwendeten Schlüssel (vgl.
Kap. 4.4).
.h
gitter pll sti.h
Schnittstellendefinitionen für die Methoden zur
Schlüsselerzeugung und zur Schätzung des Verbindungssterns (vgl. Kap. 4.4.2).
Weiterhin enthalten sind die Schnittstellendefinitionen für den Zugang zu den Identifikationsiteratoren (Iteratorpaar) (vgl. Kap 4.4.1).
gitter pll sti.cc
Implementierungen für die paarweisen Iterationsobjekte, durch die die Identifikationsrelation sowohl für das Grobgitter als auch innerhalb der
Hierarchie nach außen repräsentiert wird.
Die Struktur ähnelt dem Aufbau der Iterationsobjekte für das Gitter (gitter sti.cc). Allerdings gibt es
nur für Knoten, Kanten und Flächen des Gitters
Identifikationsiteratoren.
.cc
Hinweis: Der Algorithmus zur Berechnung der Datenstruktur (vgl. Kap. 4.4.3)
ist als Schablone implementiert und wird jeweils für Knoten, Kanten und
Flächen ausgeprägt.
þ
5.5 Datenaustausch im parallelen Verfahren
Der Austausch von Daten zwischen den Partitionen des verteilten Gitters muß
immer erfolgen, sobald ein Datum, das in mehreren Teilgittern vorkommt,
verändert wurde und die durchgeführte Veränderung auf anderen Teilgittern
sichtbar werden soll (vgl. Kap. 4.3).
Um hier eine möglichst strukturierte Situation zu erreichen, ist der Datenaustausch nach einem dreistufigen Plan hierarchisiert, der festlegt, wie die Gitterverwaltung auf eine Änderung des Zustands auf einem Teilgitter reagiert:
5.5. DATENAUSTAUSCH IM PARALLELEN VERFAHREN
Änderung:
123
Reaktion:
1
Grobgitter
Sämtliche Datenstrukturen der Identifikationsabbildung werden neu erzeugt, vergleichbar mit einem Programmstart.
Weiterhin werden die Nummern der Grobgitterelemente, wie sie für die Datenbasis der dynamischen Lastverteilung erforderlich sind, neu vergeben. Anschließend folgt die Reaktion Punkt 2.
2
Verfeinerungssituation
Die Datenbasis für die Steuerung der dynamischen Lastverteilung wird neu erzeugt. Eventuell findet eine Umverteilung des Gitters statt. Anschließend folgt die Reaktion Punkt 3.
3
Numerische Daten
Die Daten in den Randelementen des inneren“
”
Rands werden ersetzt (vgl. Kap. 4.3). Dieser Vorgang wird nach jedem Zeitschritt des numerischen
Verfahrens ausgelöst.
Im Zuge dieser Aufteilung entsteht die Möglichkeit, eine Relation wie bedingt
”
auch“ in den Entwurf einbetten zu können: Es wird davon ausgegangen, daß
eine Änderung des Grobgitterzustands (z.B. als Folge einer Neuverteilung des
Gitters) auch eine Aufdatierung der Verfeinerungsinformation und (dadurch)
der Daten des numerischen Verfahrens erforderlich macht.
Umgekehrt bedingt der Wechsel von einem Zeitschritt zum nächsten im numerischen Verfahren allein noch keine Konsistenzprobleme in der Grobgitterdatenhaltung bzw. in der Verfeinerungsstruktur.
Aufteilung des Pakets:
Datei
.cc
.h .cc
.cc
Kurzbeschreibung
gitter pll sti.cc
Prototypen für die Reaktion der Gitterverwaltung auf Änderungen des Grobgitters (Lastverteilung) bzw. des Verfeinerungszustands (Vergröberung/Verfeinerung).
gitter pll impl.h/.cc
Konkrete Realisierungen der o.g. Prototypen für
ein Gitter aus leeren“ Elemente, Flächen, Kanten
”
und Knoten.
gitter euler pll impl.cc
An die Datenhaltung im parallelen numerischen
Verfahren angepaßte Methoden zum Datenaustausch nach Verfeinerung/ Vergröberung bzw.
nach einer Grobgitteränderung (Lastverteilung).
124
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
5.6 Dynamische Lastverteilung
Die Gliederung des Entwurfs für die verteilte Gitterverwaltung (vgl. Kap. 4.6,
Abb. 4.1) bedingt ein verstreutes Auftreten von Methoden und Daten für die
dynamische Lastverteilung: Sie ist kein eigenständiges übergreifendes Konzept in der verteilten Gitterverwaltung, sondern verwendet Funktionalität aus
anderen Modulen in der angebotenen Form für ihre Belange. Insbesondere
stellt die Sicherungs- / Wiederherstellungsfunktionalität des Basisentwurfs (vgl.
Kap. 5.2) eine zentrale Säule im Modul der dynamischen Lastverteilung dar.
Desweiteren benötigt die Berechnung einer neuen Gitteraufteilung die Gewichte der Elementbäume über den Grobgitterelementen bzw. die Gewichte der
Flächenbäume über den Flächen des Grobgitters (vgl.Kap. 4.6.1, Abb. 4.12)
zur Festlegung des Modellgraphen.
Diese Information wird in einer Datenbasis lokal auf jedem Teilgitter gesammelt
und anschließend zu einer globalen Graphendarstellung auf jedem Teilgitter
zusammengeführt, aus der das CSR (Compressed Storage Representation)
Format erzeugt wird, welches von den Standardverfahren zur Partitionierung
gewichteter Graphen aus den Bibliotheken [19, 30] verwendet wird.
Aufteilung des Pakets:
Datei
Kurzbeschreibung
gitter pll sti.h
Beschreibung der Schnittstellen der Element-,
Randelement-, Flächen-, Kanten- und Knotenerweiterungen für die verteilte Organisation des Gitters:
Darin enthalten sind alle Methoden, mit denen
sich die Lastverteilung an die Gitterobjekte wendet, wie z.B. Zuweisung zu einem neuen Teilgitter, Ein- und Auspacken der Teilbäume, Vergabe der Grobgitternumerierung und Anfragen der
Daten für die Lastbewertung und Neuzuweisung
(Elementbaum- und Flächenbaumgewichte; vgl.
Kap. 4.6.1, Abb. 4.12).
.cc
gitter pll sti.cc
Implementierungen der Methoden aus gitter pll sti.h , zusätzliche Module zur Numerierung
der Grobgitterelemente und das Kriterium (2.10),
wann eine Lastverteilung vorzunehmen ist (vgl.
Kap. 2.4.1).
.cc
gitter pll mgb.cc
Erweiterung des virtuellen Konstruktors für das
Grobgitter aus gitter mgb.h um die Möglichkeit,
aus einen Datenstrom, wie ihn die dynamische
Lastverteilung erzeugt, lesen zu können (vgl.
Kap. 4.6).
.h
5.6. DYNAMISCHE LASTVERTEILUNG
.h
.cc
.h .cc
.h .cc
125
gitter pll ldb.h
Definition der Klassen für die Datenbasis zur Lastbewertung und Neuverteilung. Diese Datenbasis
besteht aus assoziativen Behältern, die Knoten
bzw. Kanten des Grobgittergraphen sammeln, und
können durch eine globale Operation zu einer globalen Graphendarstellung assembliert werden.
gitter pll ldb.cc
Methode zur Neupartitionierung des Grobgitters anhand seiner Darstellung als Graph (vgl.
Abb. 4.12): Dazu werden lokale Heuristiken aus
einer Bibliothek eingesetzt [30] und ein Algorithmus zur Reduktion der Kosten des Lasttransfers
durch Permutation der Teilgebietsnummern (vgl.
Kap. 4.6.1).
gitter pll impl.h/.cc
Implementierung aller Schnittstellenmethoden aus
dem ersten Punkt für ein leeres“ Gitter ohne Da”
teninhalt. Im einzelnen sind dies Methoden mit denen die Lastverteilung Teile des Grobgitters an
ein neues Teilgebiet zuweisen kann, Methoden zur
Kodierung der Grobgitterobjekte als Datenstrom
bzw. Methoden zum Aufbau des Verfeinerungsbaums über einem Grobgitterobjekt aus einem Datenstrom (vgl. Kap. 5.8).
gitter euler pll impl.h/.cc Redefinition
aller
Operationen
aus
ter pll impl.h/.cc, die mit den Daten des
merischen Verfahrens umgehen müssen:
transportierte Elementbäume müssen auch
Daten in den Blättern übertragen werden.
gitnuFür
die
5.6.1 Anpassungen:
Die dynamische Lastverteilung kann in mehreren Punkten an die Bedürfnisse
eines unterschiedlichen bzw. erweiterten numerischen Verfahrens angepaßt
werden:
Aufwandsmodell: Eventuell ist das Aufwandsmodell in der Form zu ändern,
daß die Verhältnisse zwischen Knotengewichten (Berechnungsaufwand) und
Kantengewichten (Kommunikationsaufwand) neu vorgegeben werden: Falls
die Knotengewichte verhältnismäßig zu klein sind, erzeugen die Standardverfahren häufig Graphen mit sehr unausgewogenen Partitionslasten (vgl.
Kap. 4.6.1).
Partitionierungsmethode: Die Berechnung der Lastzuweisung wird bisher
in Form einer Graphenpartitionierung realisiert und auf allen Teilgittern völlig
identisch und global durchgeführt. Diese Lösung bietet die Möglichkeit, einerseits Standardbibliotheken für die Graphenpartitionierung zu verwenden, die in
126
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
der Regel nicht zur Parallelverarbeitung vorbereitet sind, andererseits können
aber auch eigene Heuristiken zur Lastzuweisung schnell entwickelt werden,
weil immer die globale Information zur Verfügung steht.
Die Lastzuweisung wird mit lokalen Heuristiken aus der PARTY-Bibliothek [30]
zur Graphenpartitionierung durchgeführt, weshalb die Methode zur Neupartitionierung (in gitter pll ldb.cc ) zuerst einen Satz von Vektoren mit den Daten
zur Graphenbeschreibung erzeugen, wie die Aufrufkonvention der Bibliothek
es fordert. Dabei handelt es sich um das CSR (Compressed Storage Representation) Graphenformat [19].
Erweiterung des Datentransfers: Falls zusätzliche Daten auf den Elementen, Flächen Kanten oder Knoten mit in den Datentransfer einbezogen werden
sollen, hat dies an der Stelle der Erweiterungsklasse des betreffenden Gitterobjekts zu geschehen (vgl. Kap. 5.1.2). Das Schema, wie dem Transfer des
Grobgitterelements ein Datentransfer hinzugefügt werden kann, läßt sich anhand des Transfers der elementresidenten Daten (Erhaltungsvektor) im parallelen Simulationsprogramm nachvollziehen (gitter euler pll impl.h/.cc ).
5.7 Iterationspaket
Aufgrund der hierarchischen Anordnung (vgl. Kap. 3.2, Abb. 3.13) der Gitterkomponenten wird die Zugehörigkeit zu einer Iterationsschnittstelle (Element,
Fläche, Kante oder Knoten) nicht direkt durch eine Behälterklasse vermittelt.
Elemente
Flächen
Kanten
Knoten
SubTree
SubTree
Wrapper
SubTree
Abbildung 5.8: Zerlegung in Basisiterationsklassen: Auf einem isotrop verfeinerten Hexaederelement werden ein Elementbaum, ein Flächenbaum, ein Kantenbaum und ein einzelner Knoten vorgefunden.
5.7. ITERATIONSPAKET
127
Deshalb muß eine solche Gliederung während der Iteration vorgenommen werden, was konkret z.B. bedeutet, daß sich ein Durchlauf über alle Knoten des
Gitters unsichtbar auch auf dessen Kanten, Flächen und Elemente erstreckt.
Standardentwurfsmuster: Das Iterationskonzept folgt zunächst dem Standardentwurfsmuster des Iterator Pattern [12], die Schnittstelle läßt eine
Vorwärtsiteration [2] zu.
Der Funktionsumfang ist somit eingeschränkt, zufälliger Zugriff auf bestimmte
Gitterobjekte ist nicht möglich. Andererseits macht es wenig Sinn, Funktionalität im Entwurf festzuschreiben, die mit den gewählten Datenstrukturen nicht
mit dem erwarteten Zeitverhalten realisiert werden kann [27].
Vorschlag: Es besteht demnach Bedarf an einfach verwendbaren Iterationsklassen, die geschachtelte Iterationen in nahezu jeder beliebigen Art bereitstellen. Die Idee liegt nahe, alle Iterationsvorgänge in Basisiterationen zu zerlegen
und jene wiederum baukastenartig auf verschiedene Arten zusammenzusetzen (vgl. Abb. 5.8):
List
SubTree
Listeniterator: Der Listeniterator vermittelt den Durchlauf einer verketten Liste, die alle Elemente, Flächen Kanten bzw. Knoten des Grobgitters enthält. Der Listeniterator ist im wesentlichen ein Adapter zu den
Datenstrukturen der Standard Template Library [27].
Teilbaumiterator mit Filter: Um einen Teilbaum von Objekten eines einheitlichen Typs zu durchlaufen. Das Iterationsobjekt wird mit einer Referenz auf die Wurzel des Teilbaums konstruiert. Zusätzlich ist ein Filter
(Comparison Object [27]) eingebaut, der es ermöglicht, nur eine Teilmenge zu erfassen.
Beispiel: Der Teilbaumiterator soll im numerischen Verfahren eine Iteration über alle Elemente der Hierarchie, die Blätter der Hierarchie sind,
ermöglichen.
Wrapper
Wrapper: Wrapper (Decorator Pattern [12]) werden benötigt, um einen
Typwechsel bzgl. des Gegenstandes der Iteration zu vermitteln. Der
Wrapper wandelt den Gegenstand des eingeschlossenen (umwickelten)
Iterationsobjekts in einen Gegenstand (bzw. Referenz) von anderem Typ
um, nach Maßgabe einer festgelegten Konversionsfunktion.
Beispiel: Aus einem Hexaederelement können Teilbaumiteratoren für die
inneren Flächen- oder Kantenbäume (vgl. Abb. 5.8) konstruiert werden.
Um an den inneren Knoten zu gelangen, wird nur der Wrapper benötigt.
Insert
Verknüpfungsiterator: Der Verknüpfungsiterator setzt eine Iteration in
eine andere ein, vorausgesetzt der Gegenstand der ersten Iteration läßt
die Konstruktion des zweiten Iteratorobjekts zu (vgl. SubTree, Wrapper).
128
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
Beispiel: Der Listeniterator durchläuft alle Elemente des Grobgitters, wobei auf jedem Grobgitterelement ein Teilbaumiterator errichtet wird, der
nur die Blätter des Teilbaums zeigt. Auf diese Art werden alle Blätter der
Elementbäume durchlaufen.
Align
Verbinder: Iteratorverbinder verbinden die Iteration zweier oder mehrerer Iterationsobjekte linear. Die eingeschlossenen Iterationsobjekte werden nacheinander ausgewertet. Es gibt Iteratorverbinder, die als Schablonen mit den konkreten Typen der Iterationsobjekte ausgeprägt werden und solche für die polymorphe Schnittstelle.
Beispiel: Das Grobgitter speichert nicht alle Elemente in einem Container, sondern ordnet sie nach der Geometriesockelklasse, d.h. nach dem
Elementtyp an. Deshalb muß ein Iterationsobjekt für die Grobgitterelemente alle Behälter nacheinander durchlaufen.
Proxy
Proxy: Der Platzhalter (Proxy Pattern [12]) ermöglicht als nichtabstraktes Typargument die Ausprägung einer Schablone für eine andere Iterationsklasse, wenn die Iteration über eine polymorphe Schnittstelle verlaufen soll. Das Proxyobjekt delegiert die Iteration an die Schnittstelle,
auf die es eine Referenz hält.
Beispiel: Die Listeniteratoren des Grobgitters werden in die Iteration
des hierarchischen Gitters durch Proxies eingesetzt, was die Möglichkeit eröffnet, die Behälterklassen des Grobgitters auszutauschen.
Aufteilung des Pakets:
Datei
Kurzbeschreibung
.h
walk.h
Alle Schablonen, die zum Zusammensetzen komplizierterer Iterationsklassen benötigt werden: Listeniterator, Teilbaumiterator, Wrapper, Iteratorverknüpfung, Iteratorverbinder. Das Iteratorproxy
gehört inhaltlich zu den Schnittstellen des Gitters.
.h
gitter sti.h
Definition der Standardschnittstelle für alle Iterationsobjekte und der Iteratorproxies zum Anschluß
der Grobgitteriteration an die hierarchischen Iterationsverfahren.
gitter sti.cc
Alle Methoden des Gitters, die Iterationsobjekte für
die Elemente, Flächen, Kanten und Knoten des
Grobgitters und die jeweiligen Blätter des hierarchischen Gitters erzeugen.
gitter pll sti.h
Standardschnittstelle der geteilten Iteratoren für
mehrdeutige Gitterelemente im verteilten Gitter.
Definition eines Referenzierungsobjekts (engl.:
smartpointer) für die geteilten Iteratoren.
.cc
.h
5.8. SCHNITTSTELLE ZUM MESSAGE PASSING SYSTEM
.cc
gitter pll sti.cc
129
Alle Methoden, die für ein verteiltes Gitter Paare
von Iterationsobjekten mit der Identifikationsabbildung erzeugen.
Erweiterungen: Der Satz von Basisiterationsklassen reicht für alle möglichen Anwendungen aus. Eventuell werden eigene Filter, d.h. Vergleichsobjekte benötigt, um neuartige zusammengesetzte Iteratorenklassen erstellen zu
können. Das Iteratorenpaket ist ein Basiswerkzeug zur schnellen und sicheren
Anpassung des Gitterkonzepts an die Bedürfnisse neuer numerischer Algorithmen.
5.8 Schnittstelle zum
Message Passing System
Die Schnittstelle zum Message Passing System (vgl. Kap. 2.3.1) ist möglichst
schmal und beschreibt nur die Operationen, die im Simulationsprogramm
tatsächlich benötigt werden, was eine Anpassung auf verschiedene Bibliotheken oder Programmiermodelle bzw. Standards erleichtert.
Dies drückt sich in der vorgeschlagenen Schnittstellen- und Klassenhierarchie
(vgl. Abb. 5.10) sowie im Umfang der enthaltenen Operationen aus. Deren konkrete Implementierung verwendet eine Bibliothek nach dem Message Passing
ItemType
<< interface >>
Iterator
typedef val_t
first ()
next ()
size ()
done () : bool
item () : val_t
IteratorA, IteratorB
return true
ItemType, Filter
IteratorA, Konverter
IteratorVerknüpfung
IteratorDecorator
innen : IteratorA
aussen : IteratorB
i : Iterator
first ()
next ()
size ()
done () : bool
item () : val_t
return 0
first ()
next ()
size ()
done () : bool
item () : val_t
TeilbaumIterator
wurzel : ItemType &
stack : ItemType *
first ()
next ()
size ()
done () : bool
item () : val_t
Abbildung 5.9: Hierarchie der Iteratorklassen: Die Instanzen der Schnittstellenklasse (oben) sind leere Iterationsobjekte. Die abgeleiteten Realisierungen als
Teilbaum-, Verknüpfungs-, Listen-, Proxy-, Wrapper- und Verbindungsiterator lassen sich untereinander zu Iterationsklassen für kompliziertere Vorgänge (Datenhaltung) verbinden.
130
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
Interface Standard MPI [26], um die verschiedenen Methoden zur globalen und
lokalen Kommunikation zu realisieren.
Aufteilung des Pakets:
Datei
Kurzbeschreibung
.h
mpAccess.h
Schnittstellendefinitionen der globalen und lokalen
Dienste, die von der Anwendung angefordert werden können (vgl. Abb. 5.10).
.h
serialize.h
Definition und Implementierung einer einfachen
Lösung für ein strombasiertes Konzept zum Datentransfer. Es findet keine Kodierung bzw. Konversion der Daten statt.
Hinweis: Falls die Datendarstellung über die an
einer Anwendung beteiligten Prozesse variiert (heterogener Rechner), muß an dieser Stelle eine einheitliche Kodierung der Daten hinzugefügt werden.
GlobaleMessagePassingDienste
poolGröße () : Int
meinRang () : Int
globalesMaximum (i : Typ) : Typ
globaleSumme (i : Typ) : Typ
globalSammeln (v :Typ ) : Vector < Typ >
barriere ()
LokaleMessagePassingDienste
links : Set < Int >
anzahlLinks () : Int
linkNachRangUmrechnen (link : Int) : Int
rangNachLinkUmrechen (rang : Int) : Int
linkEinfügen (rang : Int)
alleLinksEntfernen ()
linksSymmetrischEinfügen (links : set < Int > )
linksAnzeigen ()
lokalAustauschen (v : Vector < Typ > ) : Vector < Vector < Typ > >
MPI_basierteImplementierung
poolGröße () : Int
meinRang () : Int
globalesMaximum (i : Typ) : Typ
globaleSumme (i : Typ) : Typ
globalSammeln (v :Typ ) : Vector < Typ >
barriere ()
lokalAustauschen (v : Vector < Typ > ) : Vector < Vector < Typ > >
MPI_Allreduce (..,MPI_Op,...)
MPI_Allgather (...,MPI_Type, ...)
MPI_Barrier (MPI_Comm ...)
communicator : MPI_comm
Abbildung 5.10: Klassenhierarchie des Zugangs zum Message Passing System:
Die globale Kommunikation liegt an oberster Stelle, sie wird u.a. auch zur Verwaltung der Kommunikationssterne der lokalen Methoden benötigt.
5.9. AUSFÜHRBARE PROGRAMME
.cc
.h
.cc
131
mpAccess.cc
Definition aller Operationen, die nur auf den abstrakten Schnittstellenbeschreibungen aufsetzen
und somit transparent gegenüber einem Austausch der Message Passing Bibliothek sind.
mpAccessMPI.h
Klassendefinitionen für die konkrete Implementierung der Schnittstellen zum Message Passing System auf der Basis einer Bibliothek nach dem MPI
Standard [26] und Funktionenschablonen für die
konkreten Implementierungen (mpAccessMPI.cc).
mpAccessMPI.cc
Definition der globalen und lokalen Message Passing Dienste aus den Schnittstellen mit den Mittel
der Bibliothek nach dem MPI Standard [26].
Dazu sind zwei Klassen mit polymorphen Schnittstellen definiert: Eine beschreibt die Funktionalität zur Abwicklung aller Aufgaben, die eine globale
Kommunikation erfordern, wie die Bestimmung des globalen Maximums, eine
Barriere oder das Assemblieren des globalen Verbindungssterns. Die zweite,
davon abgeleitete Schnittstelle bezieht sich auf die Kommunikation über den
lokalen Verbindungsstern, z.B. Datenaustausch zwischen benachbarten Teilgebieten.
Diese Hierarchie ergibt sich auf natürliche Art, weil Funktionen auf den lokalen
Verbindungssternen, wie z.B. das symmetrische Einsetzen von Verbindungen,
die Verfügbarkeit globaler Kommunikationswege voraussetzen.
5.9 Ausführbare Programme
Die Quelldateien, die zum Umfang dieser Arbeit gehören, lassen den Aufbau
von zwei verschiedenen Projekten mit jeweils einem ausführbaren Programm
für die serielle und die parallele Bearbeitung zu:
ÿ
ÿ
Euler-Gleichungen: Simulationsprogramm für die kompressible reibungsfreie Durchströmung einer komplexen dreidimensionalen Geometrie. Die ausführbaren Programme werden unter den Namen main euler
(serielles Verfahren) bzw. main euler pll (paralleles Verfahren) angelegt.
Ball: Undokumentiertes Testproblem ball zur lokalen Gitterweitenanpassung: Durch den Würfel wird längs der Verbindungslinie der
Schwerpunkte von linker und rechter Seitenfläche eine kugelförmige Verfeinerungszone hindurch bewegt, innerhalb derer alle Elemente bis zu
einem wählbaren, maximalen Verhältnis verfeinert werden. Die zugehörige parallele Version ball pll Version kann bei der Weiterentwicklung von
Komponenten der dynamischen Lastverteilung als Testproblem verwendet werden (vgl. Anh. B).
132
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
Weitere Quelldateien
Um die ausführbaren Programme aufbauen zu können, werden noch ein Makefile und entsprechende Quelldateien mit den Hauptroutinen der einzelnen
Projekte benötigt. Diese und alle weiteren Dateien, die inhaltlich keinem der
vorangehenden Abschnitte zugeordnet sind, werden nachfolgend beschrieben,
wodurch der Index der Quelldateien zu einer vollständigen Referenz wird (vgl.
Anh. C).
Datei
Kurzbeschreibung
makefile
Makefile für alle vier Teilprojekte, das speziell für
den C++ Compiler der IBM RS 6000 SP eingerichtet ist.
.cc
main euler.cc
Hauptroutine des seriellen Verfahrens zur Simulation kompressibler Strömungen in 3D auf unstrukturierten Hexaedernetzen mit lokaler Gitterweitenanpassung.
.cc
main euler pll.cc
Hauptroutine des parallelen Simulationsprogramms mit lokaler Gitterweitenanpassung und
dynamischer Lastverteilung.
.cc
ball.cc
Serielles Testprogramm für die lokale Gitterweitenanpassung mit einer zeitabhängigen kugelförmigen Verfeinerungszone.
.cc
ball pll.cc
Verteilt-paralleles Testproblem für Gitterweitenanpassung und dynamische Lastverteilung.
myalloc.h/.cc
Basisklasse (Allokator), die eine Fragmentierung
des Adreßbereichs aufgrund der Objekterzeugung
und -löschung während der lokalen Gitterweitenanpassung vermeidet.
.h .cc
Übersetzen der Programme
Zum Übersetzen der Programme wird ein ANSI-konformer C++ Compiler oder
der IBM CSet C++ Compiler verwendet.
Ausführen der Programme
Um die Programme mit den sequentiellen bzw. parallelen Verfahren für die
kompressiblen Euler-Gleichungen ausführen zu können, werden noch folgende
zusätzliche Dateien benötigt (vgl. Anh. B):
ÿ
Eine Datei mit dem initialen Hexaedernetz (Grobgitter) als Klartext
der Knotenkoordinaten und Element-Knoten Zusammenhänge. Der Dateiname wird mit der Kommandozeile übergeben.
5.9. AUSFÜHRBARE PROGRAMME
ÿ
133
ÿ
Eine Datei mit den konfigurierbaren Parametern des numerischen Verfahrens und der Gitterweitenanpassung. Der Dateiname ist fest eingestellt
auf: const_ffs.dat
Für die parallelen Programme ist ferner eine Datei mit den Einstellungen
für die dynamische Lastverteilung erforderlich. Der Dateiname ist fest eingestellt auf: lastverteilung.cfg
Hinweis: Weitere Hinweise zu Konfigurations- und Gitterdateien sind auf
dem CD-ROM Datenträger enthalten (README Dateien in verschiedenen Verzeichnissen).
þ
Sequentielles Programm
Die Programme für sequentielle Ausführung werden ohne Verwendung einer
Message Passing Bibliothek übersetzt und gebunden und können daher auf
konventionelle Art aufgerufen werden:
> main_euler <Grobgitter> <Backup> [Restore]
Das zweite Argument der Kommandozeile ist verbindlich, und enthält den Namen, aus dem durch Erweiterung mit .<Zeitschritt> der Dateiname für
die Sicherungsdatei im entsprechenden Zeitschritt gebildet werden soll. Das
optionale dritte Argument wird angegeben, falls die Rechnung aus einer Sicherungsdatei gestartet werden soll, es enthält in diesem Fall den Dateinamen.
Paralleles Programm
Das parallele Programm wird in der vorliegenden Form mit dem standardisierten Ladebefehl für Anwendungen, die mit einer MPI konformen Bibliothek [26]
gebunden sind, aufgerufen:
> mpirun -np # main_euler_pll <Grobgitter> <Backup> [Restore]
Hinweis: Eine Besonderheit ergibt sich beim Anlegen der Sicherungsdateien: Da die dynamische Lastverteilung die Grobgitterstruktur der verschiedenen
Teilgitter von Zeit zu Zeit verändert, werden mit jedem Sicherungsvorgang auch
die Grobgitterdaten gesichert, falls sie sich vom Zustand der vorangegangenen
Sicherung unterscheiden. Die Dateinamen werden vom parallelen Programm
nochmals mit .<Teilgitternummer> erweitert, um für jedes Teilgitter einen
eindeutigen Dateinamen zu bilden.
þ
134
KAPITEL 5. DOKUMENTATION ZUR IMPLEMENTIERUNG
135
Kapitel 6
Testbeispiele, Messungen,
Ergebnisse und Bewertung
Das parallele Programm zur Simulation kompressibler Strömungen auf Parallelrechnern mit verteiltem Hauptspeicher soll abschließend hinsichtlich seiner
Leistungsfähigkeit untersucht werden.
Dazu werden Testsituationen konstruiert, in deren Rahmen die zur Bewertung
der Beschleunigung, der Skalierbarkeit und des Nutzens der dynamischen
Lastverteilung nach den vorgestellten Definitionen (vgl. Kap. 2.4) benötigten
Zeitmessungen durchgeführt werden können. Zu jedem Test gehören mehrere
Messungen (Experimente), durch die das Verhalten der Programmausführung
für verschiedene Parameter studiert wird.
Aus den gewonnenen Meßdaten können die entsprechenden Größen berechnet und, daran anschließend, bewertet werden. Dadurch lassen sich Anhaltspunkte für eine Weiterentwicklung einzelner Komponenten des Programms finden.
6.1 Hinweise
6.1.1 Zeitmessung
Die Ausführungszeit der Anwendung sowie die anteilige Laufzeit von bestimmten Teilalgorithmen wird mit der Funktion clockt_t clock () aus der
Standardbibliothek gemessen. Dabei ist zu berücksichtigen, daß diese Funktion nicht grundsätzlich die Realzeit der Anwendung, wie sie von den Definitionen (vgl. Kap. 2.4) gefordert wird, wiedergibt.
Die gemessenen Zeitintervalle sind mit der Realzeit nur identisch, solange der
Rechner exklusiv benutzt wird, und gewisse Systemaufrufe nicht innerhalb der
136
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
Zeitmessung erfolgen. Die gewählte Vorgehensweise zur Zeitmessung ist aus
den folgenden Gründen gerechtfertigt und korrekt:
- Der Parallelrechner stand den Anwendungen exklusiv zur Verfügung.
- Die Flußberechnung des numerischen Verfahrens enthält keine Systemaufrufe, die eine Zeitmessung verfälschen könnten. Deshalb wurde dieser Teilalgorithmus stellvertretend für die anteilige Laufzeit des gesamten
numerischen Verfahrens ausgewählt (vgl. Kap. 6.1.4).
- Während des gesamten Zeitschritts werden auch Funktionen aus der
Message Passing Bibliothek aufgerufen, die bedingt durch mögliche Wartezeiten problematisch sein könnten: Zur Bestätigung der gemessenen
Werte wurde in einigen Fällen die Summe der Laufzeiten aller Zeitschritte gegen die durch externe Messung bestimmte Gesamtlaufzeit der Anwendung getestet und mit ausreichender Genauigkeit bestätigt.
Bemerkung: Eine alternative Möglichkeit besteht darin, zur Zeitmessung das
þ
MPI Profiling Interface [26] heranzuziehen.
6.1.2 Problemstellung
Geometrie: Als Testproblem wird die Simulation der zeitabhängigen Durchströmung eines Windkanals mit gegen die Strömung einspringender Stufe betrachtet. Es handelt sich um die in drei Raumdimensionen ausgedehnte Geometrie des Forward-Facing-Step [43] (vgl. Abb. 6.1). Alle Längen in der Zeichnung sind bezogen auf eine Einheitslänge angegeben, weil im Fall der reibungsfreien Euler-Gleichungen die Dimensionen Länge und Zeit durch die
Schallgeschwindigkeit linear miteinander gekoppelt sind (vgl. Kap. 1.1).
1 LE
0,2 LE
z
0,6 LE
y
3,0 LE
x
Abbildung 6.1: Abmessungen des Windkanals mit einspringender Stufe für die
Testrechnungen zur Leistungsmessung [43].
6.1. HINWEISE
137
Die Ausdehnung der Geometrie in Richtung der y-Achse wird so gewählt, daß
die zugehörige Raumrichtung durch das gröbste Gitter in acht Teilen diskretisiert wird (ca. 0,5 LE).
Randbedingungen: Die Rand- und Anfangsbedingungen entsprechen denen des Standardtestproblems [43], damit vergleichbare, bekannte Simulationsergebnisse erhalten werden: Im einzelnen sind dies der konstante Einströmwert am linken Rand des Windkanals und die Anfangswerte auf allen
Zellen des Gitters. Beide Werte sind identisch festgelegt zu
(6.1)
was für einen Windkanal ohne Stufe bereits die stationäre Lösung des Anfangsrandwertproblems darstellt. Die Skizze (vgl. Abb. 6.2) zeigt die Lage der
verschiedenen Randtypen: Die Anströmung der Geometrie erfolgt von links,
die y-Achse weist vom Betrachter weg.
Die zeitliche Entwicklung der Strömung ist bereits ausführlich studiert worden
[42]: Es entsteht zuerst eine kleine Stoßwelle an der Stufe, die sich dann rasch
vergrößert. Sobald sie eine Begrenzung der Geometrie berührt, wird sie dort
reflektiert, wodurch man ein zu Anfang zeitlich sehr schnell wechselndes Muster von Stoßwellen im Windkanal erhält. Die numerische Simulation mit dem
verwendeten einfachen Verfahren erreicht für große Zeiten langsam eine
stationäre Situation.
Einströmung
Reflexionsrand
Ausströmung
z
Sliprandbedingung
!y
x
Abbildung 6.2: Randbedingungen für die Testsituation: Konstante Überschalleinströmung von links (blau), freie Ausströmung nach rechts (rot), die Sliprandbedingung auf den Flächen vorne, hinten und vor der Stufe (grün) sowie eine Reflexionsrandbedingung auf allen anderen Flächen (gelb) [43].
138
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
Damit enthält dieses Simulationsproblem vor allem zwei Schwierigkeiten für die
dynamische Lastverteilung:
ÿ
ÿ
Zu Beginn der Berechnung entsteht eine kleine, sehr stark verfeinerte Zone an der Stufe. Falls diese nicht mehr genügend Elemente des Grobgitters überdeckt, kann kein vollständiger Lastausgleich mehr gewährleistet
sein (vgl. Kap. 4.1.1).
Die entstehenden Stoßwellen bewegen sich großräumig innerhalb des
Berechnungsgebiets. Hier stellt sich die Frage, wie oft das Gitter neu verteilt werden muß, um eine gleichmäßige Belastung des Parallelrechners
zu erreichen.
6.1.3 Basisproblem
Die Problemstellungen für die Leistungsmessung und die Bewertung der dynamischen Lastverteilung werden ausgehend von einer Referenzrechnung zu
dem Basisproblem konstruiert bzw. festgelegt.
Die Simulation für dieses Basisproblem umfaßt die numerische Berechnung
der Lösungsfunktion des physikalischen Testproblems aus dem vorigen Abschnitt, wobei die Parameter der Parallelverarbeitung, der dynamischen Lastverteilung, der lokalen Gitterweitenanpassung und des numerischen Verfahrens folgendermaßen vorgegeben werden:
ÿ
ÿ
Numerisches Verfahren:
CFL - Zahl (1.24): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . "$#&% '(
Startzeit: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ()+*-,/.* Endzeit: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (0213 5476
ÿ
Gitter/Verfeinerungskriterium:
Grobgitter: . . . . . . . . . . . . . . . . . Hexaedernetz aus 8336 Elementen
Grenzwerte (1.27): . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 '9:;
'<
Dynamische Lastverteilung:
Teilgitter: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . =
Verfahren: . . . . . . . . . . . . . . . . . . . . . Heuristik von Kernighan-Lin [30]
Parameter (4.7): . . . . . . . . . . . . . . . . . >@? 02 BA CED FGD HCIJD FGD
Zu jedem der beschriebenen Experimente werden aus Gründen der Übersichtlichkeit nur die von diesen Festlegungen abweichenden Parameter angegeben.
6.1.4 Diagramme
Beschleunigung und Skalierung im Gesamtverfahren sind üblicherweise über
viele Zeitschritte der Simulation gemittelte Größen, wodurch dem Umstand
6.1. HINWEISE
139
Rechnung getragen wird, daß Gitterweitenanpassung und Lastverteilung sporadisch über die Berechnung verteilt auftreten und ebenfalls neben dem numerischen Verfahren angemessen in der Messung zu berücksichtigen sind.
Gerade deshalb lohnt es sich aber auch, Unterprogrammlaufzeiten für jeden
Berechnungsschritt des numerischen Verfahrens zu messen und eventuell in
einem Diagramm darzustellen. Falls die Algorithmen, deren anteilige Laufzeit
betrachtet wird, einigermaßen geschickt gewählt sind, sollten die entsprechenden Messungen wesentlich reichhaltigere Informationen zur Bewertung und
eventuellen Anpassung einzelner Komponenten oder Parameter des parallelen Simulationsprogramms liefern.
Für jedes der nachfolgend beschriebenen Experimente wurde ein Laufzeitdiagramm angelegt und die folgende Legende gibt an, welche Größen gemessen
und eventuell in der Darstellung miteinander verknüpft sind. Weiterhin findet
sich dort auch die Bedeutung der im Diagramm aufgetragenen Werte und damit die Begründung, warum gerade dieser Wert interessant sein sollte.
Zudem wird auf die wichtigsten Merkmale, die sich an den verschiedenen Kurven erkennen lassen, Bezug genommen. Die zentralen, sich wiederholenden
Muster im Verlauf der Kurven, die z.B. über Häufigkeit, Kosten und Gewinn
Elementanzahl, skaliert auf ca. 3/4 der Höhe des Diagramms
Maximalwert und Mittelwert der Laufzeit für die Berechnung der numerischen Flüsse
Laufzeit des gesamten synchronisierten Zeitschritts
Aktivit ät der dynamischen Lastverteilung
30
Anzahl der Elemente, Maximum: 522262
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 2694 s
25
Sekunden
20
Beschleunigung der
nachfolgenden Zeitschritte
15
10
5
0
300
350
Annäherung von Maximalwert und
Mittelwert durch die Lastverteilung
400
Lfd. Nr. des Zeitschritts
450
500
Fluktuationen in der Laufzeit des gesamten Zeitschritts
werden durch verschiedene Iterationstiefen im
Algorithmus zur Gitterweitenanpassung hervorgerufen
Abbildung 6.3: Beispieldiagramm mit den charakteristischen Merkmalen der Diagramme zu den verschiedenen Laufzeitmessungen. Dargestellt ist ein Ausschnitt
aus einem Originaldatensatz.
140
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
der dynamischen Lastverteilung wichtige Hinweise geben, sind im Beispieldiagramm (vgl. Abb. 6.3) herausgestellt:
Legende zu den Laufzeitdiagrammen:
Die Anzahl der Elemente im gesamten Gitter, gemessen alle 16 Zeitschritte und dazwischen linear interpoliert. Dieser Wert ist mit einem passenden Faktor skaliert, um den Kurvenverlauf oberhalb der anderen Kurven zu erreichen. Der Maximalwert über alle Zeitschritte ist in der Legende angegeben.
Bedeutung: Der Verlauf der Elementzahl ist als qualitativer Referenzwert
für den Gesamtaufwand zu sehen (vgl. Kap. 4.6.1).
Die Laufzeit, die für einen gesamten synchronisierten Zeitschritt im Simulationsverfahren benötigt wird. Sie ist definitionsgemäß identisch für
alle Prozesse und summiert sich zur realen Gesamtausführungszeit der
Anwendung (vgl. Kap. 6.1.1).
Bedeutung: Der zusätzliche Zeitaufwand für eine dynamische Lastverteilung führt zu einer deutlich sichtbaren Nadel im Verlauf dieser Kurve,
wie z.B. in der Mitte des Beispieldiagramms (vgl. Abb. 6.3). Danach sollte sich erwartungsgemäß die Laufzeit für die nachfolgenden Zeitschritte
signifikant verkürzen.
Für einen ausgewählten Teilalgorithmus des numerischen Verfahrens,
der auf allen Teilgebieten völlig unabhängig ausgeführt wird, wird die
Laufzeit für jeden Prozeß und Zeitschritt gemessen. Das Diagramm
enthält den Maximalwert (rot) und Mittelwert (blau) über alle Prozesse für
jeden Zeitschritt. Hierzu wird die Berechnung der numerischen Flüsse
ausgewählt, die ca. 70% des Aufwands für das numerische Verfahren
enthält und keine Kommunikationsvorgänge bedingt (vgl. Kap. 1.3).
Bedeutung: Die Abweichung zwischen den zwei Werten liefert einen
Anhaltspunkt für eine eventuell ungleiche Verteilung der Ausführungszeit, d.h. für einen ineffizienten Einsatz des Rechners. Die mittlere
Ausführungszeit sollte auch in der Praxis (!) nur von Daten wie der Elementzahl und der Verfeinerungssituation abhängen.
Der Zusammenhang zwischen einer Gleichverteilung der Elemente und der
resultierenden Ausführungszeit ist nicht selbstverständlich, sondern kann herangezogen werden, um aus den Messungen heraus die Modellierung des Verfahrensaufwands durch die Elementzahl zu rechtfertigen (vgl. Kap. 4.6.1).
Da der Algorithmus zur Gitterweitenanpassung von sehr vielen globalen Kommunikationsvorgängen durchzogen ist, wurde darauf verzichtet, auch dort die
Korrelation zwischen Elementzahl und Ausführungszeit zu untersuchen.
6.1. HINWEISE
141
Im Beispieldiagramm findet sich unten rechts der Hinweis auf eine leichte Unregelmäßigkeit in der Laufzeit des gesamten Zeitschritts, die offenbar nicht vom
numerischen Verfahren ausgeht. Sind die Impulse vergleichsweise klein, sollten sie auf die Gitterweitenanpassung zurückgeführt werden, die je nach Tiefe
der Rekursion Teile des Algorithmus mehrfach iterieren muß (vgl. Kap. 4.5.1).
6.1.5 Visualisierte Strömungssimulation
Auf dem beigefügten CD-ROM Datenträger (vgl. Anh. B) sind animierte grafische Darstellungen der Simulation abgelegt, die zwar noch keine quantitativen
Belege für die Leistungsfähigkeit der Implementierung sind, aber zusätzliche
Informationen für die Interpretation der Diagramme und Leistungsdaten in den
folgenden Abschnitten enthalten.
Aus technischen Gründen kann nicht jeder Zeitschritt einzeln gespeichert werden. Deshalb ist bis zur Zeit KMLON'PQ nur jeder fünfte Zeitschritt und danach
nur jeder zehnte als Bild in der Animation vorhanden, wobei die Bildfrequenz
entsprechend angepaßt ist. Die Einzelbilder wurden mit der Visualisierungsbibliothek GRAPE angefertigt [31, 33].
Lösungsfunktion (Dichte)
Gitter, Teilgitter mit gleicher Farbe
Anteilige Elementanzahl im Teilgitter
Abbildung 6.4: Die visualisierte Strömumgssimulation stellt die wichtigsten Zusammenhänge grafisch dar: Oben die Dichtekomponente der Lösungsfunktion,
darunter das adaptive Gitter, dessen Elemente nach Zugehörigkeit zu den Prozessen eingefärbt sind. Der Farbbalken stellt die Verteilung dar (vgl. Anh. A).
142
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
6.1.6 Parallelrechnersystem
Alle Testrechnungen wurden auf einem Parallelrechner vom Typ IBM RS/6000
SP am Rechenzentrum der Universität Karlsruhe durchgeführt. Wie im Kapitel
zur Parallelisierung bereits hervorgehoben ist, handelt es sich bei der IBM SP
um einen verbindungsorientierten Multicomputer, d.h. der Parallelrechner setzt
sich aus einer großen Anzahl von Einprozessorsystemen zusammen, die über
ein Verbindungsnetzwerk untereinander Daten austauschen können.
Technische Daten: Jeder Knoten dieses Parallelrechners stellt ein nahezu
eigenständiges Einprozessorsystem bestehend aus einem 120 bzw. 77 MHz
Power2 Superscalar Prozessor und einem lokalen Hauptspeicher mit einer
Kapazität von 512 bzw. 2.048 MBytes dar, vergleichbar mit einem sehr leistungsfähigen Arbeitsplatzrechner.
Betriebsform: Der Betrieb ist auf kürzeste Verweilzeit ausgelegt: Zum einen
stehen die angeforderten Knoten jeder Anwendung exklusiv zur Verfügung, andererseits wird auch das Verbindungsnetzwerk zwischen den zugeteilten Knoten exklusiv belegt. Das bedeutet, daß alle Zeitmessungen absolut unbeeinflußt von anderen Anwendungen und dem Betriebszustand weiterer, nicht der
Anwendung zugeteilter Knoten sind.
Eine Mittelung über mehrere Messungen ist deshalb nicht erforderlich. Es stellt
sich heraus, daß die Zeitmessungen mit jedem weiteren Experiment sehr gut
reproduziert werden.
Beschränkungen: Betriebsbedingt ist die Laufzeit von Anwendungen auf
vier Stunden beschränkt. Ebenso darf keine Anwendung mehr als 128 Knoten des Rechners reservieren.
Für Rechnungen mit sehr großem Bedarf an Hauptspeicher stehen acht Knoten mit jeweils ca. zwei Gigabytes Kapazität zur Verfügung, allerdings nur mit
den schwächeren 77 MHz Prozessoren. Messungen auf diesem Prozessortyp
sind wiederum nur bis zu max. 32 Knoten möglich.
An dieser Stelle sollte klar werden, daß nicht alle Meßreihen so aussehen
können, wie sie theoretisch erwartet werden: Falls Basismessungen auf einem
Knoten in der Meßreihe vorkommen, muß auf die Partition mit 77 MHz Knoten
ausgewichen werden, um einen Knoten mit ausreichender Hauptspeicherkapazität vorzufinden.
In dieser Partition stehen aber nur bis zu max. 32 Prozessoren zur Verfügung.
Wird auf den Einprozessor-Referenzwert verzichtet, besteht die Möglichkeit auf
der Produktionspartition auch mit bis zu 128 Prozessoren zu messen. Daher
beginnen manche Meßreihen erst bei 10 bzw. 20 Prozessoren.
6.2. DYNAMISCHE LASTVERTEILUNG
143
6.2 Dynamische Lastverteilung
Die Untersuchung des Verhaltens der dynamischen Lastverteilung ist ein zentrales Anliegen dieses Kapitels, weil die Technik, die dabei zur Anwendung
kommt, weitgehend neu ist und durch die verwendete Strategie einerseits viel
Potential für eine effiziente Implementierung bietet, andererseits aber auch gewisse Einschränkungen an die Vorgaben in der Problemstellung macht (vgl.
Kap. 4.1.1).
6.2.1 Aktivität
Zwei Diagramme mit allen Zeitschrittwerten für die gemessenen Laufzeiten
vermitteln einen qualitativen Eindruck von der Aktivität der dynamischen Lastverteilung. Schon hier zeigt sich, warum der Anfangsphase der Berechnung
Simulation: Forward-Facing-Step, 10 Teile, t=0.0 bis t=1.0, SP 120 MHz Knoten
40
Anzahl der Elemente, Maximum: 605037
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 28395 s
35
Sekunden
30
25
20
15
10
5
0
0
500
1000
Zeitschritt
1500
2000
Simulation: Forward-Facing-Step, 10 Teile, t=1.0 bis t=1.95, SP 120 MHz Knoten
40
Anzahl der Elemente, Maximum: 546713
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 33015 s
35
Sekunden
30
25
20
15
10
5
0
2500
3000
3500
Zeitschritt
4000
4500
Abbildung 6.5: Diagramm der Rechenzeiten für alle Zeitschritte des Basisproblems. Erkennbar ist die hohe Aktivität der dynamischen Lastverteilung am Anfang der Simulation.
144
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
später nochmals besondere Aufmerksamkeit gewidmet wird: Die durch den
zusätzlichen Aufwand der Lastverteilung hervorgerufenen Nadeln in der Kurve
der Gesamtlaufzeit des Zeitschritts sind gegenüber der Laufzeit des numerischen Verfahrens unverhältnismäßig groß, und treten exzessiv auf.
Trotzdem sollte berücksichtigt werden, daß damit nur ein kleiner Teil der Gesamtlaufzeit verbunden ist. (Das Diagramm enthält fast 5.000 Zeitschritte). In
weiten Teilen der Programmausführung findet man subjektiv ausgeglichene
Verhältnisse vor. Die Endphase der Rechnung ist weniger interessant, weil
dort langsam ein stationärer Zustand der numerischen Lösung und der Verfeinerungssituation erreicht wird (vgl. Kap. 6.1.2).
Zusätzlich kann die zeitliche Entwicklung der Lösungsfunktion, des Gitters und
der Verteilung der Grobgitterzellen anhand der animierten Visualisierung auf
dem CD-ROM Datenträger verfolgt werden (vgl. Anhang B).
6.2.2 Aufwand und Nutzen
Die dynamische Umverteilung der Elemente des Gitters während einer zeitabhängigen Berechnung mit lokaler Gitterweitenanpassung ist eine Spezialität“
”
des für Rechnerarchitekturen mit verteiltem Hauptspeicher entworfenen Programms und damit ein Zusatzaufwand, der weder mit der Simulationsaufgabe
noch mit dem numerischen Verfahren in unmittelbarem Zusammenhang steht.
Deshalb soll hier untersucht werden, ob dieser zusätzliche Aufwand gerechtfertigt ist, und zwar in dem Sinne, daß durch die Mittel der Lastverteilung die
Gesamtausführungszeit tatsächlich verkürzt wird. Dazu werden drei Testsituationen betrachtet:
Situation A
An der ersten Testsituation soll untersucht werden, wie stark ausgehend von
einem bestimmten Zeitpunkt während der Berechnung die bis dahin eingehaltene Lastgleichheit durch zeitabhängige Phänomene gestört wird, und wieviel
Zeit demgegenüber in der Referenzsituation zur Wiederherstellung der Lastgleichheit aufzuwenden ist.
Ausgewählt wird dazu eine Simulationsphase mit nahezu konstanter Elementzahl von ca. 550.000 Elementen, die durch die Gitterweitenanpassung im wesentlichen umverteilt werden. Es bietet sich die Berechnung der Strömung zwischen den Zeitpunkten KLRNPS und K;LETPN an, die bei den gegebenen Einstellungen 567 Zeitschritte benötigt.
Die Messungen wurden mit und ohne dynamische Lastverteilung auf 10 Prozessoren durchgeführt. Die Elementzahl je Teilgitter U VWU X beträgt im ersten Fall
maximal 110% vom Mittelwert.
6.2. DYNAMISCHE LASTVERTEILUNG
145
Ergebnisse: Die Diagramme (vgl. Abb. 6.6) zeigen, daß bis zum 250. Zeitschritt beide Rechnungen nahezu identisch verlaufen, danach aber im Referenzexperiment eine Umverteilung des Gitters vorgenommen wird. Im Experiment ohne Lastausgleich wird hier langsam eine ungleiche Verteilung der
Laufzeiten des numerischen Verfahrens erkennbar, die sich bis zum Ende des
Experiments auf ca. 63% erhöht.
Die Referenzsituation weist lediglich eine maximale Laufzeitabweichung von
17 % auf. Ebenfalls deutlich ist die Überlegenheit der Berechnung mit dynamischer Lastverteilung, wenn die Gesamtlaufzeit betrachtet wird: Das Verfahren
ohne Lastausgleich benötigt mit 8620 Sekunden etwa 13% mehr Laufzeit als
das Referenzverfahren mit 7629 Sekunden.
Forward-Facing-Step, 10 Teile, Keine Lastverteilung, t=0.8 bis t=1.0, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 547154
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 8620 s
30
Sekunden
25
20
15
10
5
0
0
100
200
300
Zeitschritt
400
500
Forward-Facing-Step, 10 Teile, 0.0 < Balance < 1.1, t=0.8 bis t=1.0, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 547154
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 7629 s
30
Sekunden
25
20
15
10
5
0
0
100
200
300
Zeitschritt
400
500
Abbildung 6.6: Diagramm zur Testsituation A: Die Berechnung wurde auf zehn
Teilgebiete aufgeteilt und jeweils ohne dynamische Lastverteilung (oben) und mit
dynamischer Lastverteilung (unten) durchgeführt.
146
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
Situation B
Das zweite Testproblem untersucht die Auswirkung einer Skalierung des Problems, indem die Elementzahl im gesamten Gitter auf ca. 1.260.000 Elemente
erhöht wird. Es handelt sich im wesentlichen um das große Testproblem zur
Messung der Beschleunigung und Skalierung (vgl. Kap. 6.3).
Bedingt durch die Problemgröße und den verkleinerten Zeitschritt konnten im
Rahmen der für eine Anwendung zur Verfügung stehenden Zeit nur 224 Zeitschritte berechnet werden. Die Messungen wurden wie im vorangegangenen
Fall jeweils mit und ohne dynamischen Lastausgleich durchgeführt, wobei die
Parameter zur Steuerung der Lastverteilung aus dem Basisproblem übernommen sind. D.h. die zulässige Elementzahl je Teilgitter beträgt im Experiment mit
Lastausgleich maximal bis zu 110% vom Mittelwert.
Forward-Facing-Step, 20 Teile, Keine Lastverteilung, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1258235
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 3281 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Forward-Facing-Step, 20 Teile, 0.0 < Balance < 1.1, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1259096
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 3161 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Abbildung 6.7: Diagramm zur Testsituation B: Die Berechnung wurde auf 20 Teilgebiete aufgeteilt und jeweils ohne dynamische Lastverteilung (oben) und mit
dynamischer Lastverteilung (unten) durchgeführt.
6.2. DYNAMISCHE LASTVERTEILUNG
147
Ergebnisse: Die Messung am großen Testproblem bestätigt die Ergebnisse
des vorigen Abschnitts, allerdings weniger deutlich: Bedingt durch die kürzere
Phase der Simulation zwischen K$LYN'PS und K$LYN'PSZ bewegt sich die Verfeinerungszone weniger signifikant und die Belastung der einzelnen Prozessoren
bleibt gleichmäßiger. Das Verfahren ohne dynamischen Lastausgleich benötigt
hier mit 3281 Sekunden nur etwa 4% mehr als das Verfahren mit dynamischem
Lastausgleich. Die Ergebnisse dieser Messungen werden später noch zur Bestimmung der Skalierung des Programms herangezogen.
Situation C
Der qualitative Überblick über die Laufzeiten der Simulation (vgl. Kap. 6.2.1)
zeigt zu Beginn der Berechnung eine sehr hohe Aktivität der dynamischen
Lastverteilung. Weiterhin stellt sich heraus, daß die Verhältnisse von mittlerer
und maximaler Laufzeit der Flußberechnung durch die Lastverteilung während
der ersten 60 bis 100 Zeitschritte sogar verschlechtert werden; dennoch erfolgt
in fast jedem Zeitschritt der Versuch, eine neue Aufteilung des Gitters vorzunehmen.
Damit liegt ein starker Hinweis vor, daß in dieser singulären Situation mit sehr
wenigen stark verfeinerten Elementen des Grobgitters eventuell eine Verbesserung erreicht werden kann, wenn entweder die Lastverteilung ausgesetzt
oder das Kriterium für die zulässige Ungleichverteilung der Elementzahl (4.7)
gelockert wird.
Um diese Möglichkeiten zu untersuchen, werden der Referenzsituation mit einem Ausschnitt aus der Simulation des Basisproblems zwei modifizierte Verfahren gegenübergestellt. Die Einzelheiten sind:
Experiment:
1 Referenzsituation aus dem Basisproblem mit einer zulässigen Elementzahl von maximal 110% des Partitionsmittelwerts. Die Referenzsituation
wendet damit das schärfste Kriterium zur Steuerung der dynamischen
Lastverteilung an, was in den Diagrammen (vgl. Abb. 6.8) an der kleinen
Abweichung zwischen Maximal- und Mittelwert der Laufzeit der Flußberechnung zu erkennen ist.
2 Verändertes Kriterium für die dynamische Lastverteilung 4.7. Die zulässige Elementzahl beträgt hier maximal 130 % vom Mittelwert. Das Diagramm zeigt deutlich die Sägezahnstruktur, die durch die Drift in der Abweichung der maximalen Laufzeiten der Teilgebiete verursacht wird.
3 Für das dritte Experiment wird vorab eine Aufteilung des Grobgitters bestimmt und die dynamische Lastverteilung für die gesamte Berechnung
ausgesetzt. Die Zerlegung des Grobgitters erfolgt entlang der Symmetrierichtung (y-Achse, vgl. Abb. 6.1), was aber nicht vollständig möglich
148
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
ist, weil das Grobgitter in dieser Raumrichtung nur acht Elementlagen
aufweist. Die erkennbare Abweichung in den maximalen und mittleren
Laufzeiten des numerischen Verfahrens ist auf diesen Umstand zurückzuführen.
Bemerkung: Das Vorgehen im dritten Experiment ist sozusagen das Beste,
was man tun kann, falls für das Simulationsproblem kein Verfahren mit dynamischer Lastverteilung zur Verfügung steht. Allerdings wird die relativ ausgeglichene Laufzeit durch große Schnittflächen im Gitter und damit durch einen
[
hohen Kommunikationsaufwand erkauft (vgl. Kap. 4.6.1).
Ergebnisse: Tabelle 6.1 und die Laufzeitdiagramme (vgl. Abb. 6.8) geben
Anlaß zu den folgenden Beobachtungen:
\ Für die Dauer der ersten 100 Zeitschritte ist das Verfahren ohne dynamische Lastverteilung deutlich im Vorteil. Es verursacht keinen zusätzlichen
Aufwand und hat trotzdem eine verhältnismäßig ausgeglichene Laufzeitverteilung mit ca. 120% - 140% maximaler Abweichung vom Mittelwert.
\ Zwischen dem 101. und dem 400. Zeitschritt bietet das Verfahren mit
größerer Abweichung von der optimal verteilten Elementzahl die effizienteste Möglichkeit.
\ Gegen Ende des Tests, also zwischen dem 401. und dem 847. Zeitschritt,
wird langsam die Überlegenheit einer strikten Begrenzung der Schieflage
in der Elementverteilung sichtbar: Das Referenzproblem liefert hier die
kürzeste Laufzeit.
Bemerkung: Als Nebeneffekt findet man mit den Messungen eine deutliche
Bestätigung dafür, daß die gemittelten Zeitwerte der Flußberechnung ein gutes
Maß für den Gesamtzeitaufwand für diesen Teil des numerischen Verfahrens
sind: Die Linie der Mittelwerte verläuft identisch in allen drei Diagrammen, unabhängig von der Gesamtlaufzeit des Zeitschritts.
[
Effizienz und Nutzen der dynamischen Lastverteilung
Zeit [s] für die Zeitschritte von
Experiment
Summe
0 - 100
101 - 400
401 - 847
1
692
1825
5257
7774
2
329
1636
5422
7387
3
257
2295
6681
9233
Tabelle 6.1: Laufzeiten der drei Experimente zur dynamischen Lastverteilung aufgeschlüsselt nach drei Phasen. Die kürzeste Laufzeit ist jeweils hervorgehoben.
6.2. DYNAMISCHE LASTVERTEILUNG
149
Forward-Facing-Step, 10 Teile, 0.0 < Balance < 1.1, SP 120 MHz Knoten
40
Anzahl der Elemente, Maximum: 535261
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 7773 s
35
Sekunden
30
25
20
15
10
5
0
0
100
200
300
400
500
Zeitschritt
600
700
800
Forward-Facing-Step, 10 Teile, 0.0 < Balance < 1.3, SP 120 MHz Knoten
40
Anzahl der Elemente, Maximum: 527029
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 7386 s
35
Sekunden
30
25
20
15
10
5
0
0
100
200
300
400
500
Zeitschritt
600
700
800
Forward-Facing-Step, 10 Teile, statische Lastverteilung, SP 120 MHz Knoten
40
Anzahl der Elemente, Maximum: 532048
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 9232 s
35
Sekunden
30
25
20
15
10
5
0
0
100
200
300
400
500
Zeitschritt
600
700
800
Abbildung 6.8: Testsituation C: Oben als Referenzsituation das Diagramm zum
Basisproblem bis t=0,3. In der Mitte eine Simulation mit größerer zulässiger Abweichung von der mittleren Elementzahl (starke Sägezahnstruktur). Unten eine
Simulation ohne dynamische Lastverteilung, mit einer vorab bestimmten Zerlegung des Grobgitters.
150
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
6.3 Beschleunigung und Skalierung
Zur Messung der Beschleunigung des Gesamtverfahrens durch die Parallelisierung wird ein Zeitintervall der Simulation mit nahezu konstanter Elementzahl
ausgewählt, das die für die Lastverteilung singulären Situationen am Anfang
(hohe Aktivität) oder am Ende der Simulation (keine Aktivität) nicht enthält.
6.3.1 Vergleich mit dem seriellen Programm
Tabelle 6.2 ermöglicht den Vergleich des parallelen Programms mit seiner sequentiellen Basiskomponente, die keinen zusätzlichen Aufwand zur Berech-
Beschleunigungsmessung mit ca. 760.000 Elementen
Beschleunigung gegenüber
Anzahl Teilgitter /
Prozessoren
Laufzeit [s]
Seriell
16663
1
1
19479
0,86
1,00
–
2
9913
1,68
1,96
1,8 - 2
3
6747
2,46
2,89
2,7 - 3
4
5323
3,13
3,66
3,6 - 4
5
4278
3,90
4,55
4,5 - 5
6
3646
4,57
5,34
5,5 - 6
7
3180
5,24
6,13
6,4 - 7
8
2784
5,98
7,00
7,3 - 8
10
2357
7,07
8,26
9,1 - 10
14
1771
9,41
11,00
12,8 - 14
20
1314
12,68
14,82
18,2 - 20
32
910
18,31
21,41
29,1 - 32
1. Zeile
theoretisch
erreichbar
2. Zeile
–
Vergleichsrechnung: Gleichmäßig feines Gitter, ca. 4,4 Mio. Elemente,
keine Gitterweitenanpassung, keine dynamische Lastverteilung
32
2016
–
Tabelle 6.2: Beschleunigung der Simulation durch Parallelverarbeitung ausgehend von einem Teilgebiet, d.h. einem eingesetzten Prozessor. Die rechnerischen
Werte der Beschleunigung sind jeweils bezüglich der sequentiellen bzw. der parallelen Programmversion mit nur einem Teilgitter angegeben.
6.3. BESCHLEUNIGUNG UND SKALIERUNG
151
nung der Datenbasis der Lastverteilung und zur verteilten Verfeinerung enthält.
Die vom parallelen Programm benötigte zusätzliche Laufzeit ergibt sich aus der
ersten und zweiten Zeile zu ca. 17%.
Ebenfalls eingetragen sind die Beschleunigungswerte gegenüber dem seriellen Programm bzw. gegenüber der parallelen Ausführung auf einem Teilgebiet für verschiedene parallele Anwendungen mit bis zu 32 Teilgebieten (Prozessoren). Die letzte Spalte enthält die durch die Grenzen der Lastverteilung
vorgegebenen theoretischen Grenzen der Beschleunigung (vgl. Kap. 2.4.1).
Der gemessene Wert sollte zwischen der Anzahl der Prozessoren und diesem
Wert liegen, was für die Rechnungen mit bis zu vier Teilgebieten auch zutrifft.
Die Experimente mit fünf bis 32 Prozessoren unterschreiten diese theoretische
Schranke bereits.
Zusätzlich enthält die Tabelle in der letzten Zeile die Werte einer Vergleichsrechnung, die auf einem global verfeinerten Gitter mit der Gitterweite des kleinsten Elementdurchmessers der adaptiven Berechnung durchgeführt wurde.
Daraus resultiert eine um den Faktor 5,6 erhöhte Elementzahl (4,4 Mio. anstelle von 760.000). Die Laufzeit hat sich gegenüber der adaptiven Version
offensichtlich mehr als verdoppelt (+ 120%), obwohl auf Gitterweitenanpassung und dynamische Lastverteilung verzichtet werden kann. Das liefert einen
deutlichen Beleg für die Vorteile der Simulationsrechnung mit lokaler Gitterweitenanpassung, selbst wenn dadurch auf verteilt-parallelen Rechnersystemen
ein echter Zusatzaufwand für die dynamische Lastverteilung nötig ist.
Hinweis: Alle Testrechnungen wurden auf 77 MHz Knoten durchgeführt, die
über eine große Hauptspeicherkapazität verfügen. Daraus resultiert verglichen
[
mit den 120 MHz Knoten eine um ca. 52% längere Gesamtlaufzeit.
6.3.2 Kleines Testproblem
Grundlage für das kleine Testproblem ist das Zeitintervall von K]L^N'PS bis
K_L`TPaN aus dem Basisproblem (vgl. Kap. 6.1.3). Gestartet wird mit Daten aus
Beschleunigungsmessung mit ca. 540.000 Elementen
Beschleunigung gegenüber 1.Zeile
Anzahl Teilgitter /
Prozessoren
Laufzeit [s]
10
7629
1
20
4693
1,63
1,8 - 2
40
3738
2,04
3,6 - 4
Meßwert
theoretisch
Tabelle 6.3: Berechnete Beschleunigung des Gesamtverfahrens aus den Meßwerten des kleinen Testproblems.
152
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
einer Berechnung mit zehn Teilgebieten, weshalb bei einer größeren Anzahl
von Prozessoren im ersten Zeitschritt eine Lastverteilung erfolgt. Die Diagramme für 20 und 40 Prozessoren zeigen am Anfang eine Nadel in der Laufzeit,
die auf diesen Umstand zurückgeht (vgl. Abb. 6.9).
Ergebnisse: Die Daten für die Ausführungszeiten sind dem Laufzeitdiagramm (vgl. Abb. 6.9) und der Tabelle 6.3 zu entnehmen: Erkennbar ist in
den Diagrammen eine erwartungsgemäß höhere der Aktivität der dynamischen
Lastverteilung bei einer größeren Anzahl von Teilgebieten.
Aus den gemessenen Daten für die Gesamtlaufzeit können die Werte der Beschleunigung bcd2defTN'PaZNg und bcd2defT=NP(h7Ng nach der Definition (2.1) berechnet
werden.
Auch hier sollte beachtet werden, daß die Beschleunigungswerte nur mit den
Werten der durch (2.11) abgeschätzten theoretisch erreichbaren Beschleunigung verglichen werden, die im ungünstigsten Fall, d.h. konstante maximale
Lastungleichverteilung während der gesamten Simulationsrechnung, deutlich
reduzierte Werte annimmt.
6.3.3 Großes Testproblem
Zur Bestimmung der Skalierbarkeit des Gesamtverfahrens wird die Beschleunigung noch für ein größeres Testproblem bestimmt. Um auch hier mit den Daten
der Simulation zum Zeitpunkt K;LiNPaS starten zu können, werden die Parameter
zur Steuerung der Gitterweitenanpassung so verändert, daß sich eine höhere
Elementzahl ergeben hat.
Alle Rechnungen starten aus einem Datensatz für 20 Teile, weshalb die Messungen für 40, 80 und 120 Teilgebiete auch hier eine entsprechende Nadel
am Anfang aufweisen, die von der initialen Lastverteilung verursacht wird (vgl.
Beschleunigungsmessung mit ca. 1.220.000 Elementen
Beschleunigung gegenüber 1.Zeile
Anzahl Teilgitter /
Prozessoren
Laufzeit [s]
20
3161
1
40
2007
1,58
1,8 - 2
80
1623
1,95
2,7 - 4
120
1502
2,10
4,0 - 6
Meßwert
theoretisch
Tabelle 6.4: Berechnete Beschleunigung des Gesamtverfahrens aus den Meßwerten des großen Testproblems. Im Fall der Aufteilung des Gitters auf 120 Prozessoren sinkt die Anzahl der Elemente pro Teilgitter bereits auf ca. 10.000 ab.
6.3. BESCHLEUNIGUNG UND SKALIERUNG
153
Abb. 6.10, 6.11). Zur Zeit der Messung bestand auf dem Parallelrechner am
Rechenzentrum der Universität Karlsruhe eine Beschränkung von maximal 128
Prozessoren pro Anwendung, weshalb die Beschleunigungswerte nur für bis zu
120 Prozessoren vorliegen (anstelle von 160).
Ergebnisse: Alle gemessenen Gesamtlaufzeiten sowie die Werte für die Beschleunigung der Anwendung bjcd2dekZNPhNg , bjcd2delZmNPaSN7g und bjcd2delZmNPT=ZNg sind
abschließend in Tabelle 6.4 zusammengestellt.
Daß die Werte für die Beschleunigung bei 120 und 80 Prozessoren weit vom
anzunehmenden Grenzwert, der durch das Verhältnis der Prozessorzahlen (6
bzw. 4) vorgegeben ist, entfernt sind, sollte nicht zu negativ ausgelegt werden: Unter der Annahme, daß die Modellierung des Berechnungsaufwands exakt ist, findet man mit den Begründungen aus Kapitel 2.4, daß der durch die
zulässige Abweichung vom Partitionsmittelwert der Elementzahl noch erreichbare Speedup bei ca. 4 bzw. 2,7 liegen kann.
Die Diagramme auf den folgenden Seiten zeigen die Ausführungszeiten für die
verschiedenen Messungen.
Beobachtung: Die sieben Diagramme mit den Messungen der Zeitschrittlaufzeit für die Experimente zum Beschleunigungsverhalten legen den Schluß
nahe, daß eine Ausführungszeit von ca. vier Sekunden pro Zeitschritt nicht unterschritten werden kann. Dies deutet sich schon bei der Untersuchung des
seriellen Programms an: Dort findet man z.B. signifikante konstante Zeiten für
die Erzeugung der Iterationsobjekte (vgl. Kap. 5.7) in jedem Zeitschritt der Si[
mulation.
154
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
Forward-Facing-Step, 10 Teile, 0.0 < Balance < 1.1, t=0.8 bis t=1.0, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 547154
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 7629 s
30
Sekunden
25
20
15
10
5
0
0
100
200
300
Zeitschritt
400
500
Forward-Facing-Step, 20 Teile, 0.0 < Balance < 1.1, t=0.8 bis t=1.0, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 545236
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 4693 s
30
Sekunden
25
20
15
10
5
0
0
100
200
300
Zeitschritt
400
500
Forward-Facing-Step, 40 Teile, 0.0 < Balance < 1.1, t=0.8 bis t=1.0, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 546727
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 3738 s
30
Sekunden
25
20
15
10
5
0
0
100
200
300
Zeitschritt
400
500
Abbildung 6.9: Diagramme zur Messung der Beschleunigung am kleinen Testproblem, 20, 40 und 80 Teilgebiete. Die zulässige Elementzahl in der Partition beträgt
max. 110% vom Mittelwert. Deutlich zu erkennen ist die zunehmende Aktivität
der dynamischen Lastverteilung mit ansteigender Anzahl von Teilgebieten (vgl.
Abb. 6.10).
6.3. BESCHLEUNIGUNG UND SKALIERUNG
155
Forward-Facing-Step, 20 Teile, 0.0 < Balance < 1.1, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1259096
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 3161 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Forward-Facing-Step, 40 Teile, 0.0 < Balance < 1.3, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1258235
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 2007 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Forward-Facing-Step, 80 Teile, 0.0 < Balance < 1.5, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1258235
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 1623 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Abbildung 6.10: Diagramme zur Messung der Beschleunigung am großen Testproblem auf 20, 40 und 80 Teilgebieten. Die Zulässige Elementzahl in der Partition beträgt max. 110% (oben), 120 % (Mitte) bzw. 150% (unten) vom Mittelwert.
Dadurch wird eine übermäßige Aktivität der dynamischen Lastverteilung vermieden (vgl. Abb. 6.9).
156
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
6.3.4 Skalierung
Die Skalierbarkeit kann für die vorliegende Problemstellung nicht mit der durch
die Definition (2.4) möglichen Präzision bestimmt werden, weil es dazu nötig
wäre, auf eine Messung am seriellen Verfahren zurückzugehen, um das skalierte Problem festzulegen. Der Datenumfang läßt dies hier aber nicht zu.
Deshalb wurde das im Sinne der Definition skalierte Problem durch
ein Problem mit skalierter Elementzahl ersetzt.
Aber selbst unter dieser vereinfachenden Annahme stößt man auf weitere
Schwierigkeiten: Da es nicht möglich ist, a-priori die Schranken (1.27) für das
Verfeinerungskriterium so einzustellen, daß sich eine bestimmte Elementzahl
ergibt, muß mit signifikanten Abweichungen der Elementzahl vom gewünschten Wert umgegangen werden.
Außerdem ist zu berücksichtigen, daß die Skalierungsmessung nur das Skalierungsverhalten auf dem Niveau der Zeitschrittschleife mißt. Das nichtskalierbare Verhalten des verwendeten expliziten Finite Volumen Verfahrens, das aus
der CFL-Bedingung an die Zeitschrittweite (1.24) resultiert, wird von den hier
berechneten Werten nicht wiedergegeben.
Die Meßwerte, die in die Definition der Skalierung (2.4) eingesetzt werden,
stammen aus den Beschleunigungsmessungen am großen und am kleinen
Testproblem (vgl. Kap. 6.3). Tabelle 6.5 enthält im oberen Teil die gemittelte
Elementzahl während der adaptiven Berechnung (Spalte 2) und die mittlere
Dauer eines Zeitschritts (Spalte 3) jeweils für das kleine und das große Testproblem. Im unteren Teil der Tabelle sind die drei möglichen Kombinationen für
einen Faktor-2-Skalierungswert no d2cqp ekZPrsg angegeben.
Forward-Facing-Step, 120 Teile, 0.0 < Balance < 1.5, t=0.82 bis t=0.86, SP 120 MHz Knoten
35
Anzahl der Elemente, Maximum: 1258235
Laufzeit num. Fluss Mittelwert
Laufzeit num. Fluss max. Wert
Ges. Zeitschritt, Summe: 1502 s
30
Sekunden
25
20
15
10
5
0
0
50
100
Zeitschritt
150
200
Abbildung 6.11: Diagramm 4 zur Messung der Beschleunigung am großen Testproblem, 120 Teilgebiete. Die zulässige Elementzahl in der Partition beträgt max.
150% vom Mittelwert.
6.4. BEWERTUNG DER ERGEBNISSE
157
Beobachtung: Offensichtlich fallen die Skalierungswerte in allen drei Fällen
sehr gut aus, theoretisch kann bei exakter Anwendung der Definition bestenfalls ein Wert von 1,0 erreicht werden (vgl. Kap. 2.4).
Darüber hinaus wird die Elementzahl in allen Kombinationen mehr als verdoppelt, erwartungsgemäß sollte der Skalierungswert dadurch verkleinert werden.
Die Gründe dafür sind nicht ganz durchsichtig: Zum einen arbeitet das Simulationsprogramm bei gleicher Elementzahl schneller, falls das initiale Grobgitter
weniger Zellen enthält, dafür aber stärker verfeinert wurde (Datenstrukturierung), andererseits greift die Skalierung der Elementzahl eventuell nicht exakt
am Berechnungsaufwand an, wie es von der Definition (2.4) verlangt wird.
6.4 Bewertung der Ergebnisse
6.4.1 Dynamische Lastverteilung
\ Grundsätzlich zeigt sich, daß eine adaptive Berechnung mit stark
zeitabhängiger Lösungsfunktion ohne dynamische Lastverteilung nicht
Berechnung der Skalierung
Mittelwert von
Anzahl Teilgitter /
Prozessoren
Elementzahl
Zeitschrittdauer [s]
10
542.056
13,43
20
540.675
8,26
40
539.775
6,58
20
1.220.364
14.05
40
1.219.210
8.92
80
1.219.050
7.22
Kombination /
Definition
Verhältnis von
Elementzahl
Zeitschrittdauer
10 ➝ 20
t=ulvlw/xky-zm{q|q}~
2,25
0.96
20 ➝ 40
t ulvlw/x y-zm{(z}~
2,25
0.93
40 ➝ 80
t ulvlw/x y-zm{2=}~
2,26
0.99
Tabelle 6.5: Kombination der Meßwerte am kleinen (Zeile 1-3) und großen (Zeile
4-6) Testproblem zur Bestimmung der Skalierbarkeit des Programms bezüglich
der Zeitschrittschleife. Es können die Werte für t ulvlw/x y-zm{~{|q}{z}m{f} bestimmt
werden.
158
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
effizient durchgeführt werden kann, was auch die Ergebnisse aus anderen Arbeiten zu vergleichbaren Themen bestätigt [5, 22]: Die Abweichungen in der Belastung des Parallelrechners sind schon bei kurzen Simulationen signifikant und wirken sich in praktisch jedem Fall ungünstig
auf die Gesamtlaufzeit aus (vgl. Kap. 6.2.2).
\ Während Berechnungsphasen mit extrem niedriger Elementzahl sollte
auf häufige Umverteilung des Gitters verzichtet werden. Dies wirkt sich
auch günstig auf die Laufzeit des Verfeinerungsalgorithmus aus, der in einem großvolumig verteilten Gitter schneller arbeitet, weil nicht so häufig
Gebietsgrenzen während der Balancierung überschritten werden (vgl.
Kap. 4.5). Als grober Anhaltswert sollte dabei gelten, daß ein Teilgitter
entweder mindestens 10.000 Zellen enthält oder leer bleibt. Zu Beginn
einer vergleichbaren Simulation (d.h. ca. 8.000 Elemente im ersten Zeitschritt) würde man also nur ein Teilgebiet mit allen Elementen belegen
und dann mit ansteigender Elementzahl immer weitere auffüllen.
\ Zusätzlich ist ein (zumindest heuristisches) Kriterium zur Festlegung der
Schranken für die Steuerung der dynamischen Lastverteilung zuzufügen,
damit eine möglichst kurze (optimale) Simulationsdauer ohne Vorkenntnisse des Anwenders realisiert wird. Alle Meßwerte, die in diesem Abschnitt zur Bewertung a-posteriori verwendet werden, stehen dem parallelen Programm schließlich schon zur Laufzeit zur Verfügung, auf dieser
Basis sollte sich das Problem befriedigend lösen lassen.
\ Es bedarf noch einer Überprüfung des gesamten Programms auf reduzierbare konstante Ausführungszeiten im Berechnungsschritt. Diese Zeiten sind nicht parallelisierbar und geben deshalb eine untere Schranke
für die Ausführungsdauer eines Zeitschritts im numerischen Verfahren
vor, denn infolge der CFL-Bedingung (1.24) müssen bei gleicher Problemstellung auf einem feineren Gitter (kleinerer Diskretisierungsfehler)
mehr Zeitschritte berechnet werden. Eine über viele Skalen der Problemgröße konstante Gesamtausführungszeit (optimale Skalierung des Gesamtproblems) kann nur erreicht werden, wenn die oben beschriebenen
konstanten Ausführungszeiten pro Zeitschritt möglichst klein sind.
6.4.2 Beschleunigung
Die Beschleunigung wurde in zwei Testfällen ausgehend von einer dynamischen Aufteilung des Gitters in 10 bzw. 20 Teile gemessen. Dabei lag die rechnerische Effizienz (2.3) zwischen 0,5 (50%) und 0,98 (98%). Obwohl diese
Werte schon recht gut sind, sollte berücksichtigt werden, daß mit dem gewählten numerischen Verfahren vergleichsweise wenig Berechnungsaufwand verbunden ist.
6.4. BEWERTUNG DER ERGEBNISSE
159
Ebenso großzügig ist die Anpassung der Gitterweite vor jedem Zeitschritt des
numerischen Verfahrens - üblicherweise wird hier auf einfachere Lösungen
ausgewichen. Andererseits zeigt sich an dieser Stelle, wie wenig die Leistung
des Verfeinerungs- bzw. Vergröberungsalgorithmus durch die Erweiterung auf
ein verteiltes Gitter degradiert wird.
Gerade diese beiden Teile der Gitterweitenanpassung sind anerkanntermaßen
harte Punkte in einem Parallelisierungsvorhaben, weil rekursive Algorithmen,
die sequentiell sehr einfach und schnell arbeiten, durch iteratives Vorgehen mit
globaler Kommunikation ersetzt werden müssen (vgl. Kap. 4.5) [22].
6.4.3 Skalierung
Die Skalierbarkeit des parallelen Simulationsprogramms kann aus technischen
Gründen nicht mit der durch die Definition (2.4) möglichen Schärfe bestimmt
werden, weil kein Parameter der Simulation existiert, durch dessen Veränderung die Laufzeit auf einem Einprozessorsystem direkt festgelegt werden kann.
Selbst die Gesamtelementzahl im Gitter hängt nur indirekt von den Schranken
des Verfeinerungskriteriums (1.27) ab.
Im untersuchten Bereich, d.h. für Elementzahlen zwischen 540.000 und
1,3 Mio. wird der lokale Ressourcenbedarf nur von den anteiligen Elementzahlen im jeweiligen Teilgitter bestimmt. Dies gilt für den Hauptspeicherbedarf
während der Gitterweitenanpassung und Lastverteilung ebenso, wie für den
Zeitaufwand. Hierbei ist zu beachten, daß die Berechnung der Partitionierung
des Gitters nur von der Anzahl der Grobgitterelemente abhängt und deshalb
im Skalierungsexperiment konstant ist.
Darin dürfte auch der Grund zu sehen sein, warum die Skalierungswerte wesentlich besser ausfallen als die Beschleunigungswerte, die für große Prozessorzahlen sehr empfindlich gegen konstante, also nicht parallelisierte Anteile
der Ausführungszeit sind (Amdahl's Law/Gustafson's Law) [15].
6.4.4 Zusammenfassung
Auf der Grundlage des vorgeschlagenen Entwurfs kann nachweislich ein verteilt paralleles Simulationsprogramm implementiert werden, das in Messungen
unter realistischen Voraussetzungen bereits in seiner ersten Version gute Resultate zeigt.
Die Strategie, verschiedene Skalen in die Problemstellung einzuführen und für
die verteilte Gitterverwaltung nutzbar zu machen, hat sich als lohnend herausgestellt. Im Identifikationsalgorithmus, in der verteilten Gitterweitenanpassung
und im Modul zur dynamischen Lastverteilung können nahezu alle Schwierigkeiten bereits auf dem Grobgitter behandelt werden.
160
KAPITEL 6. TESTBEISPIELE, MESSUNGEN UND BEWERTUNG
Daraus resultiert die gute Effizienz dieser Zusatzfunktionen, deren Aufwand in
ausgeglichenem Verhältnis zum dem des numerischen Verfahrens steht: Die
Umverteilung des Gitters benötigt nur die Zeit eines zusätzlichen Berechnungsschritts der numerischen Simulation.
Zusammenfassend bleibt festzuhalten, daß die Komponenten, die den Basisentwurf zu einer parallelen Gitterverwaltung für Rechner mit verteiltem Hauptspeicher ausdehnen, weder den Programmentwurf noch das Laufzeitverhalten
des danach realisierten Simulationsprogramms dominieren, sie nehmen vielmehr genau den Raum ein, der ihnen bei realistischen Vorgaben an Komplexität und Effizienz eingeräumt werden sollte:
Der Nutzen des beschriebenen Programmentwurfs besteht darin, der Integration der konkreten geometrischen und mathematischen Strukturen im Simulationsprogramm den Vorrang gegenüber technischen Detaillösungen eingeräumt
zu haben; die vorliegende Implementierung beweist, daß dies auch bei guter
Gesamtleistungsfähigkeit möglich ist.
161
Anhang A
Abbildungen
Abbildung A.1: Ausschnitt aus der Strömungssimulation zum Startzeitpunkt.
162
ANHANG A. ABBILDUNGEN
Abbildung A.2: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=0,3
Abbildung A.3: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=0,6
163
Abbildung A.4: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=0,8
Abbildung A.5: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=1,0
164
ANHANG A. ABBILDUNGEN
Abbildung A.6: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=1,2
Abbildung A.7: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=1,4
165
Abbildung A.8: Ausschnitt aus der Strömungssimulation zum Zeitpunkt t=1,66
166
ANHANG A. ABBILDUNGEN
167
Anhang B
CD-ROM Datenträger
Quelldateien, Versionen
Im Verzeichnis /RCS auf dem CD-ROM Datenträger sind die Quelldateien
enthalten. Das Programm wurde unter Zuhilfenahme des Revision Control Systems (RCS) [38] entwickelt, wodurch sich die Möglichkeit ergibt, einheitlich auf
verschiedene Versionen des Programms zugreifen zu können (vgl. Abb. B.1):
\ Die Referenzversion, also die Version, mit der sämtliche Ergebnisse der
vorliegenden Arbeit erzielt worden sind, kann unter der Versionsnummer
1.100 (bzw. identisch 1.100.1.1) aus den Dateien entnommen werden.
Diese Version dient als Beleg für die vorgestellten Ergebnisse.
\ An der Stelle der Referenzversion wurde ein Zweig zur Versionspflege
angelegt, der jedoch keine inhaltlichen Weiterentwicklungen enthält (Versionen 1.100.1.x).
\ Der Hauptzweig enthält inhaltliche Weiterentwicklungen in den Versionen
nach der Revisionsnummer 2.1. Die am weitesten entwickelte Version
bietet zusätzlich zur Referenzversion (Version 1.100):
+ Weitere Kommentare und ergänzende Erläuterungen in den Quelldateien.
+ Ein eigenständiges Tetraederkonzept mit isotropen Verfeinerungsregeln in Analogie zum bestehenden Hexaedergitter.
+ Überarbeitete Schnittstellen zu den Partitionierungsverfahren aus
PARTY 1.1 [30] und Metis 3.0
19 .
Hinweis: Das Tetraederkonzept fügt dem ursprünglichen Entwurf, der ausschließlich Hexaederelemente kennt, Tetraeder, Dreiecksflächen und Dreiecksrandelemente mit identischem Funktionsinhalt, d.h. einem angepaßten nume[
rischen Verfahren für die kompressiblen Eulergleichungen, hinzu.
168
ANHANG B. CD-ROM DATENTRÄGER
Standard Template Library:
Die Version der Standard Template Library (STL) [27] aus dem Jahr 1997 kann
im Verzeichnis /stl eingesehen werden. Die ANSI Standardisierung der
Programmiersprache C++ hat zu einigen kleineren Änderungen, insbesondere
bei den Dateinamen, geführt, die zu berücksichtigen sind, falls die Programme
mit einem ANSI konformen C++ Compiler übersetzt werden sollen.
Partitionierungsbibliotheken
Die Berechnungen zu den vorgestellten Ergebnissen wurden unter Verwendung der Partitionierungsbibliothek PARTY 1.1 [30] durchgeführt (vgl. Kap. 6).
Die Urheberrechte für dieses Softwareprodukt liegen bei der Universität Paderborn. Eine vergleichbare Bibliothek, die ohne Lizensierungsverfahren frei
verfügbar ist, liegt mit Metis 3.0 [19] vor, weshalb die Schnittstellen zu dieser
Bibliothek in die erweiterten Versionen des Zweigs 2.x integriert sind.
Visualisierte Strömungssimulation
Die Dateien mit der animierten Darstellung der Strömungssimulation (vgl.
Kap. 6.1.5) befinden sich im Verzeichnis /movie . Es handelt sich um
MPEG1 bzw. QuicktimeTM (Apple) codierte Movies mit einer Auflösung von
728 x 546 bzw. 1152 x 864.
Zweig zur Weiterentwicklung
Zweig zur Versionspflege
Version 2.x
Version 1.100.1.x
Version 2.1
Referenzversion
Vorversionen
Version 1.100
Version 1.100.1.1
Version 1.x
Abbildung B.1: Zweige und Versionen des parallelen Simulationsprogramms.
169
Verschiedenes
Das Verzeichnis /misc enthält weitere Dateien, die zum Test des Simulationsprogramms nötig sind, wie z.B. Gitter- und Parameterdateien.
Urheberrechte
Keine Einschränkungen.
170
ANHANG B. CD-ROM DATENTRÄGER
171
Anhang C
Index der Quelldateien
Datei
Seite
ball.cc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
ball pll.cc . . . . . . . . . . . . . . . . . . . . . . . . . .132
euler.cc . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
euler.h . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
gitter euler impl.cc . . . . . . . . . . . 118, 119
gitter euler impl.h . . . . . . . . . . . . . . . . . 119
gitter euler pll impl.cc . . . 118, 120, 123
gitter euler pll impl.h . . . . . . . . . 119, 125
gitter geo.cc . . . . . . . . . . . . . . . . . .110, 117
gitter hexa top.h . . . . . . . . . . . . . 111, 112
gitter hexa top pll.h . . . . . . . . . . . . . . . 116
gitter impl.h . . . . . . . . . . . . . 110, 111, 112
gitter mgb.cc . . . . . . . . . . . . . . . . . 110, 117
gitter mgb.h . . . . . . . . . . . . . 110, 117, 124
gitter pll idn.cc . . . . . . . . . . . . . . . . . . . . 116
gitter pll impl.cc . . . . . . . . . 116, 123, 125
gitter pll impl.h . . . . . . . . . . 116, 123, 125
gitter pll ldb.cc . . . . . . . . . . . . . . . 125, 126
gitter pll ldb.h . . . . . . . . . . . . . . . . . . . . . 125
gitter pll mgb.cc . . . . . . . . . . . . . . . . . . . 124
gitter pll sti.cc . . . . . . 115, 118, 123, 124
gitter pll sti.h . . . . . . . 115, 122, 124, 128
gitter sti.cc . . . . . . . . . . . . . . 110, 117, 128
gitter sti.h . . . . . . . . . . . . . . . 110, 117, 128
key.h . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
main euler.cc . . . . . . . . . . . . . . . . . . . . . 132
main euler pll.cc . . . . . . . . . . . . . . . . . . 132
makefile . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
mapp cube 3d.cc . . . . . . . . . . . . . . . . . 120
mapp cube 3d.h . . . . . . . . . . . . . . . . . . 120
mpAccess.cc . . . . . . . . . . . . . . . . . . . . . . 131
mpAccess.h . . . . . . . . . . . . . . . . . . . . . . . 130
mpAccess MPI.cc . . . . . . . . . . . . . . . . . 131
mpAccess MPI.h . . . . . . . . . . . . . . . . . . 131
myalloc.cc . . . . . . . . . . . . . . . . . . . . . . . . .132
myalloc.h . . . . . . . . . . . . . . . . . . . . . . . . . .132
parallel.h . . . . . . . . . . . . . . . . . . . . . . . . . . 115
serialize.h . . . . . . . . . . . . . . . . . . . . . . . . . 130
swflux.cc . . . . . . . . . . . . . . . . . . . . . . . . . . 119
walk.h . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
172
ANHANG C. INDEX DER QUELLDATEIEN
173
Literaturverzeichnis
[1] A. Aho, J. Hopcroft, J. Ullman: Data Struktures and Algorithms; AddisonWesley (1987)
[2] A. Aho, J. Hopcroft, J. Ullman: The Design and Analysis of Computer Algorithms; Addison-Wesley (1974)
[3] C. Badura: Implementation einer vorkonditionierten hp-Version der Finiten
Elemente Methode in 3D; Diplomarbeit, Universität Freiburg (1999)
[4] H. Balzert: Objektorientierte Systemanalyse; Spektrum Akademischer
Verlag (1996)
[5] P. Bastian: Parallele adaptive Mehrgitterverfahren; Teubner Stuttgart
(1996) http://dom.ica3.uni-stuttgart.de/ug/
[6] K. Birken: A Dynamic Data Model for Parallel Adaptive PDE Solvers; Proc.
of HPCN Europe (1995)
[7] G. Booch, J. Rumbaugh, J. Jacobson: The Unified Modeling Language User Guide; The Rational Software Corp., Addison-Wesley Longman
(1998)
[8] B. Cockburn, C.-W. Shu: TVB Runge-Kutta Local Projection
Discontinuous-Galerkin Finite Element Method For Conservation Laws II:
General Framework Mathematics of Computation, Vol.52 (1989)
[9] B. Engquist, S. Osher: One - sided Difference Approximations for nonlinear Conservation Laws; Math. Comput. 36 (1981)
[10] I. Foster: Designing and Building Parallel Programs; Addison-Wesley
(1995), http://www.mcs.anl.gov/dbpp/
[11] M. Fowler: Applying the Standard Object Modeling Language; AddisonWesley Longman (1997)
[12] E. Gamma, R. Helm, R. Johnson, J. Vlissides: Design Patterns; AddisonWesley (1995)
174
LITERATURVERZEICHNIS
[13] M. Garey, D. Johnson, L. Stockmeyer: Some simplified np-complete graph
problems; Theoretical Computer Science (1976)
[14] T. Gessner, D. Kröner, B. Schupp, M. Wierse: Finite volume methods for
conservation laws and convection dominated diffusion equations; Preprint
Universität Freiburg (1996)
[15] A. Geiger: Parallelrechner Architektur und Anwendung; Forschungs- und
Entwicklungsbericht RUS-19 ISSN 0941-4665 RUS (1995)
[16] E. Godlewski, P.-A. Raviart: Numerical Approximation of Hyperbolic Systems of Conservation Laws; Appl. Math. Sc. 118, Springer (1996)
[17] C. S. Horstmann, G. Cornell: Core Java 1.1 Vol. II - Advanced Features;
Prentice-Hall Computer Books (1997)
[18] R.M. Karp, V. Ramachandran: A Survey of parallel Algorithms for Shared
Memory Machines; Handbook of Theor. Comp. Science North Holland
(1990)
[19] G. Karypis, V. Kumar: Metis, A Software Package for Unstructured Partitioning Graphs, Unstructured Meshes, and Computing Fill-Reducing Orderings of Sparse Matrices, Version 3.0.3; Univ. of Minnessota (1997)
http://www.cs.umn.edu/k arypis/metis/main.html
[20] B. W. Kernighan, S. Lin: An effective heuristic procedure for partitioning
graphs; The Bell Systems Technical Journal (1970), 291-308
[21] B. W. Kernighan, D. M. Ritchie: The C Programming Language, Second
Edition, ANSI C; Prentice-Hall (1988), 256
[22] R. Kleinrensing: Ein adaptives paralleles Finite-Volumen-Verfahren; Diplomarbeit Universität Bonn (1994)
[23] D. Kröner: Numerical Schemes for Conservation Laws; Wiley & Teubner,
Stuttgart (1997)
[24] D. Kröner, M. Ohlberger: A posteriori Error Estimates for Upwind Finite
Volume Schemes for nonlinear Conservation Laws in Multi Dimensions;
Preprint 02-98, Universität Freiburg (1998)
[25] D. Kröner, M. Rokyta: Convergence of Upwind Finite Volume Schemes for
Scalar Conservation Laws in 2D; SIAM J. Num. Anal., Vol.31, No. 2 (1994)
[26] Message Passing Interface Forum: MPI: A Message Passing Interface
Standard; University of Tennesse (1993,1994)
[27] D. R. Musser, A. Saini: STL Tutorial and Reference Guide; AddisonWesley (1996)
LITERATURVERZEICHNIS
175
[28] E. F. Van de Velde: Concurrent Scientific Computing; Springer New York
(1994)
[29] B. Stroustrup: Die C++ Programmiersprache; Addison-Wesley (1992)
[30] R. Preis, R. Diekmann: The PARTY Partitioning-Library User Guide – Version 1.1; Preprint, Universität-GH Paderborn (1996)
[31] M. Rumpf,A. Schmidt: GRAPE, GRAphics Programming Environment;
Report Nr. 8 SFB 256, Universität Bonn (1990)
[32] M. Rumpf, A. Schmidt, K. G. Siebert: Functions Defining Arbitrary Meshes Report Nr. 14, SFB 256, Universität Bonn (1994)
[33] M. Rumpf, B. Schupp: Visualization of parallel data based on procedural
access; Proceedings in Visualization and Mathematics (1997)
[34] J. L. Steger, R. F. Warming: Flux Vector Splitting of the Inviscid Gasdynamic Equations with Application to Finite Difference Methods; Journal of
Comp. Physics 40 (1981)
[35] A. Stroud: Approximate calculation of multiple integrals; Eaglewood-Cliffs
(1971)
[36] R. Schwörer: Entwicklung und Parallelisierung von Finite-VolumenVerfahren zur Lösung der kompressiblen Navier-Stokes-Gleichungen in
2-D; Diplomarbeit Universität Freiburg (1997)
[37] A. S. Tanenbaum: Distributed Operating Systems; Prentice-Hall (1995)
[38] W. F. Tichy: RCS - A System for Version Control; Software-Practice &
Experience 15 (1985)
[39] L. G. Valiant: A Bridging Model for Parallel Computation; Comm. of the
ACM (1996) Vol. 33
[40] L. Volkmann: Graphen und Digraphen: Eine Einführung in die Graphentheorie; Springer Wien New York (1991)
[41] R. F. Warming, R. M. Beam, B. J. Hyett: Diagonalization and Simultaneous
Symmetrization of the Gas Dynamic Matrices; Math. of Comp. 29 (1997)
[42] M. Wierse: Higher Order Upwind Schemes on Unstructured Grids for the
Compressible Euler Equations in Timedependent Geometries in 3D; Preprint Universität Bonn (1995) Nr. 393
[43] P. R. Woodward, P. Colella: The Numerical Simulation of Two-Dimensional
Flow with Strong Shocks; Journal of Computational Physics 54 (1984),
115-173