Vorlesungs- und Übungsablauf (Matrikel 2016) Wintersemester
Werbung
 Wintersemester")
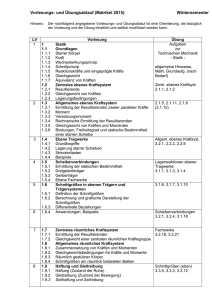
Wintersemester Vorlesungs- und Übungsablauf (Matrikel 2016) Hinweis: LV 1 2 3 4 5 Der nachfolgend angegebene Vorlesungs- und Übungsablauf ist eine Orientierung, die bezüglich der Vorlesung und der Übung inhaltlich und zeitlich modifiziert werden kann. 1 1.1 1.1.1 1.1.2 1.1.3 1.1.4 1.1.5 1.1.6 1.1.7 1.2 1.2.1 1.2.2 1.2.3 1.3 1.3.1 1.3.2 1.3.3 1.3.4 1.3.5 1.3.6 1.6.3 1.6.4 Statik Grundlagen Starrer Körper Kraft Wechselwirkungsprinzip Schnittprinzip Reaktionskräfte und eingeprägte Kräfte Gleichgewicht Äquivalenz von Kräften Zentrales ebenes Kraftsystem Resultierende Gleichgewicht von Kräften Lagerungsbedingungen Allgemeines ebenes Kraftsystem Ermittlung der Resultierenden zweier paralleler Kräfte Moment Versetzungsmoment Rechnerische Ermittlung der Resultierenden Gleichgewicht von Kräften und Momenten Bindungen, Freiheitsgrad und statische Bestimmtheit einer starren Scheibe Ebene Tragwerke Grundbegriffe Lagerung starrer Scheiben Streckenlasten Beispiele Scheibenverbindungen Ermittlung der statischen Bestimmtheit Dreigelenkträger Gerberträger Ebene Fachwerke Schnittgrößen in ebenen Trägern und Trägersystemen Definition der Schnittgrößen Berechnung und grafische Darstellung der Schnittgrößen Differentielle Beziehungen Anwendungen, Beispiele 1.7 1.7.1 1.7.2 1.8 1.8.1 1.8.2 1.8.3 1.8.4 1.9 1.9.1 1.9.2 1.9.3 Zentrales räumliches Kraftsystem Ermittlung der Resultierenden Gleichgewicht einer zentralen räumlichen Kräftegruppe Allgemeines räumliches Kraftsystem Zusammensetzung von Kräften und Momenten Gleichgewichtsbedingungen für Kräfte und Momente Räumlich gestützter Körper Schnittgrößen am räumlich belasteten Balken Haftung und Gleitreibung Haftung (Zustand der Ruhe) Gleitreibung (Zustand der Bewegung) Seilhaftung und Seilreibung 1.4 1.4.1 1.4.2 1.4.3 1.4.4 1.5 1.5.1 1.5.2 1.5.3 1.5.4 1.6 1.6.1 1.6.2 6 7 8 Vorlesung Übung Aufgaben zur Technischen Mechanik - Statik allgemeine Hinweise, Math. Grundaufg. (nach Bedarf) Zentr. ebenes Kraftsyst. 2.1.1, 2.1.2 2.1.5, 2.1.11, 2.1.8 (2.1.12) Allgem. ebenes Kraftsyst. 2.2.1, 2.2.2, 2.2.9 Lagerreaktionen ebener Tragwerke 3.1.1, 3.1.3, 3.1.4 3.1.6, 3.1.7, 3.1.10 Scheibenverbindungen 3.2.1, 3.2.4, 3.1.18 Fachwerke 3.2.18, 3.2.21 Schnittgrößen (eben) 3.3.5, 3.3.3, 3.3.12 9 10 11 12 13 14 2 2.1 2.1.1 2.1.2 2.1.3 2.1.4 Festigkeitslehre Grundlagen der Festigkeitslehre Einleitung Spannungszustand Deformationszustand Elastizitätsgesetze (Materialgesetze) 3.3.12,3.3.11 2.2 2.2.1 2.2.1.1 2.2.1.2 2.2.2 2.3 2.3.1 2.3.2 Zug und Druck Spannungen und Verformungen von Stabsystemen Berechnung der Spannungen Berechnung der Verformungen Flächenpressung Biegung Voraussetzungen und Annahmen Spannungen bei gerader Biegung 3.3.14, (3.3.24) 2.3.3 2.3.4 2.3.5 2.3.6 Flächenmomente 2. Grades Verformungen bei gerader Biegung Schiefe Biegung Anwendungen, Beispiele 2.4 2.4.1 2.4.2 Haftung Querkraftschub Schubspannungen infolge Querkraftbelastung 7.9,(7.3) Abschätzung der Verformungen infolge Querkraftschub kursiv: kann bei Bedarf entfallen Zentr. räuml. Kraftystem 4.1.1, 4.1.2 Allgem. räuml. Kraftsyst. 4.2.8 räuml. Schnittgrößen 4.3.3, .... Haftung 7.1,7.2, 7.9 Vorlesungs- und Übungsablauf (Matrikel 2016) Hinweis: LV 1 2 3 Der nachfolgend angegebene Vorlesungs- und Übungsablauf ist eine Orientierung, die bezüglich der Vorlesung und der Übung inhaltlich und zeitlich modifiziert werden kann. 2.5 2.5.1 2.5.1.1 2.5.1.2 2.5.1.3 2.5.2 2.6 2.7 2.7.1 2.7.2 2.7.3 2.8 3 3.1 3.1.1 3.1.2 Vorlesung Torsion Torsion von Stäben mit Kreis- und Kreisringquerschnitten Annahmen und Voraussetzungen Berechnung der Torsionsspannung Berechnung der Verformung (Verdrehwinkel ϕ) Hinweise zur Torsion allgemeiner Querschnitte n Scherbeanspruchung Zusammengesetzte Beanspruchung Überlagerung gleichartiger Spannungen Mehrachsige Spannungszustände Spannungshypothesen Anwendungen und Beispiele zur Festigkeitslehre 6 3.3 7 3.3.1 3.3.2 3.3.3 3.3.4 8 3.4 Dynamik Kinematik des Punktes Definitionen Weg, Geschwindigkeit und Beschleunigung in kartesischen Koordinaten Weg, Geschwindigkeit und Beschleunigung in Bahnkoordinaten Weg, Geschwindigkeit und Beschleunigung in Polarkoordinaten Bewegung auf einer Kreisbahn Grundaufgaben der Kinematik Kinematik der ebenen Bewegung des starren Körpers Grundlagen Momentanpol Kinematik von Systemen aus Punktmassen und starren Körpern Kinetik der ebenen Bewegung von Punktmassen und starren Körpern D’ALEMBERTsches Prinzip für Punktmassen Ebene Bewegungen von starren Körpern Aufstellung von Bewegungsgleichungen Anwendungen und Beispiele zum D’ALEMBERTschen Prinzip Energiebetrachtungen 9 3.4.1 Anwendungen und Beispiele zum Energiesatz 10 3.5 3.5.1 3.5.2 3.5.3 3.5.4 3.5.5 Schwingungen Einführung Freie ungedämpfte Schwingungen mit einem Freiheitsgrad Freie gedämpfte Schwingungen mit einem Freiheitsgrad Erzwungene Schwingungen mit einem Freiheitsgrad Anwendungen und Beispiele zur Schwingungslehre 4 3.1.3 3.1.4 5 11 12 13 14 3.1.5 3.1.6 3.2 3.2.1 3.2.2 3.2.3 4. Sommersemester Zusammenfassung und Wiederholung Beispiele zur Klausurvorbereitung kursiv: kann bei Bedarf entfallen Übung Übungsaufgaben zur Technischen Mechanik - Festigkeitslehre – Zug/Druck 2.6, 2.3, 2.15 Biegung: 4.2, 4.3 Biegung:4.5, 4.32 Biegung: 4.36, 4.47 Torsion :5.15, 5.20, Zusammengesetzte Beanspruchung: 4.23 (mit Kreis- und Rechteckquerschnitt), 7.7, 7.10 Übungsaufgaben zur Technische Mechanik - Dynamik – Kinematik des Punktes 1.1, 1.2, 1.5 1.12, 1.13, Kinematik des starren Körpers:2.9 Kinetik (Punktmassen und Körpern) 3.3,3.5 (3.6), 3.17 3.21, 3.23 nur ZB für 3.35, 3.36 Energiesatz: 3.21, 4.6 4.4, 4.22 Wiederholung und Zusammenfassung