Eine Firma aus dem Sondermaschinenbau erhält von einem Betonwerk
Werbung

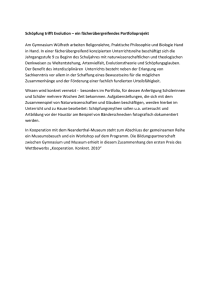
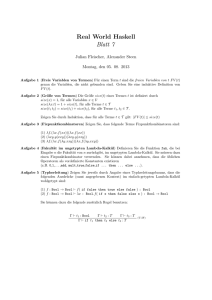
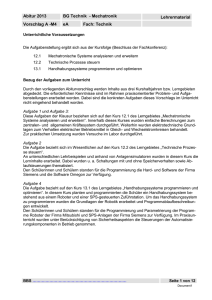
Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… Eine Firma aus dem Sondermaschinenbau erhält von einem Betonwerk den Auftrag, eine Anlage zur Befüllung von Betonmischerfahrzeugen zu konzipieren. Der Auftraggeber gibt die folgenden Vorgaben: Der Fahrer muss für das Befüllen das Führerhaus nicht verlassen. Das Bedienpult befindet sich in Höhe des Fahrerhauses. Nachdem der Fahrer rückwärts in die Anlage eingefahren ist, erhält er die notwendigen Informationen über Signalleuchten. Eine Ampelanlage soll dem Fahrer des Betonmischers die richtige Beladeposition des LKW anzeigen. Die richtige Position wird durch den Sensor B1 erfasst. Als Mitarbeiter dieser Firma sind Sie an diesem Projekt mit der Lösung einzelner Teilaufgaben beteiligt. In ihrer Verantwortung liegt das Automatisieren der bereits konstruierten Befüllungsanlage sowie die Dimensionierung und Auswahl der einzelnen Komponenten. Ein Technologieplan liegt vor Hilfsmittel: Taschenrechner und Tabellenbuch Technische Daten: Technische Daten, Zeichnungen und Datenblätter siehe Anhang Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 1 Aufgabe (17 Punkte) 1.1 Analyse der Anlage (5 Punkte) Arbeiten Sie sich zunächst in die Befüllungsanlage ein, indem Sie die einzelnen Teilsysteme der Anlage nennen und deren Funktion, Aufgaben und Abhängigkeiten kurz darstellen und erläutern 1.2 Getriebemotor (Getriebe mit E-Motor) (12 Punkte) Ein Kollege von Ihnen beschäftigt sich mit Getriebemotoren. Für die Auslegung des Getriebemotors bittet er Sie, die folgenden technischen Daten zu berechnen: Drehmoment, Leistung und Drehzahl an der Getriebewelle bzw. der Bandrolle. Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 2 Aufgabe (35 Punkte) Für die Automatisierungslösung sind zwei Betriebsarten von Ihnen vorzusehen. Ferner sind elektrische Betriebsmittel auszuwählen und zu dimensionieren. Dazu müssen von Ihnen verschiedene technische Dokumente erstellt werden. 2.1 Sensorauswahl Am Lager sind drei verschiedene Sensoren vorhanden(OGH 200, IGC 231, KG5065), die sie zunächst in Betracht ziehen. Durch einen Vergleich wollen Sie herausfinden, welcher Sensor für die beschriebene Anwendung (B1) am besten geeignet ist. 2.1.1 Ergänzen Sie die Tabelle. Nutzen Sie die angehängten Datenblätter und Einbauanleitungen.(4 Punkte) (IGC231) (OGH200) (KG5065) Funktionsprinzip Ausgangsfunktion Welche Objekte werden erkannt? Schaltabstand, Reichweite Schaltfrequenz Stromaufnahme Preis Vorteile Nachteile AnwendungsBereiche, Besonderheiten 47,10 € 91,10 € 99,70 € Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 2.1.2 Wählen Sie einen geeigneten Sensor aus und begründen Sie ihre Auswahl. (2 Punkte) 2.2 Zuordnungsliste ( 5 Punkte) Ergänzen Sie die Zuordnungsliste unter Verwendung des Technologieschemas und der Beschaltung der SPS im Anhang (LOGO, S7, Phoenix …). Notieren Sie zusätzlich in den Bemerkungen die jeweilige Funktion (Öffner/Schließer) des Betriebsmittels. Zuordnungsliste Symbol Adresse Datentyp Bemerkung S0 BOOL Not-Aus Sofort stoppen (Öffner) E 0.0 S1 BOOL S2 BOOL S3 BOOL S4 BOOL S5 BOOL B1 BOOL B2 BOOL B3 BOOL Q1 A 0.0 BOOL Motor für das Förderband Rechts Q2 A 0.1 BOOL Motor für das Förderband Links P1 BOOL P2 BOOL P3 BOOL P4 BOOL Q3 A 0.6 BOOL Ventil zum Öffnen des Silos (mit Federrückstellung) Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 2.3 Nachlaufzeit (2 Punkte) Nach der Befüllung des LKWs mit Beton soll das Transportband noch nachlaufen, um Reste vom Band zu entfernen. Berechnen Sie die Nachlaufzeit mit den Daten des Transportbandes aus dem Anhang. 2.4 GRAFCET (13 Punkte) Beschreiben Sie die Funktion der Befüllungsanlage stichpunktartig mit eigenen Worten und entwickeln Sie einen GRAFCET. Berücksichtigen Sie dabei auch das Nachlaufen des Transportbandes und alle im Technologieschema aufgeführten Betriebsmittel. Dokumentieren Sie den GRAFCET mit aussagekräftigem Kommentar. 2.5 Handbetrieb Förderband (3 Punkte) Um das Transportband auch manuell von Schüttgut befreien zu können, sollen Sie einen Rechts-/ Linkslauf im Handbetrieb realisieren. Entwickeln Sie das dazugehörige Programm im Funktionsplan. 2.6 Bestimmung der Beladungsmasse Das Gewicht des Betonmischers wird über einen Gewichtssensor (Wägezelle) erfasst. Bei dem verwendeten Gewichtssensor handelt es sich um einen Dehnungsmessstreifen. Hinweise: Die Widerstandsänderung eines Dehnungsmessstreifens berechnet man anhand der Formel: l R R 0 k l0 ΔR : Widerstandsänderung infolge Verformung R0 : Widerstand vor der Verformumg k : Materialkonstante l : lineare Längenänderung des Messdrahtes l0 : Länge des Messdrahtes vor Verformung Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 2.6.1 Widerstandsberechnung (3 Punkte) Der verwendete Dehnungsmessstreifen (DMS) hat eine Länge von 120 mm. Der Widerstand beträgt vor der Verformung 600 und die entsprechende Materialkonstante k = 4. Die maximale Stauchung bzw. Dehnung des Messstreifens beträgt 8 mm. Berechne die Widerstandsänderung und den maximalen sowie minimalen Widerstand des Dehnungsmessstreifens. 2.6.2 Brückenschaltung (3 Punkte) In der Messtechnik ist es üblich, Messungen mittels einer Brückenschaltung zu realisieren. Skizziere eine Brückenschaltung mit dem Dehnungsmessstreifen als Messwiderstand. Ein Zweig mit zwei 200 Widerständen und ein Zweig mit einem 600 Widerstand und dem DMS. Zeichne weiterhin alle Spannungen in die Schaltung ein und berechne die Brückenspannung bei einem Widerstand von 650 für den DMS, wenn die Eingangsspannung 24 V beträgt. 3 Konstruktionsänderung (18 Punkte) Der Kunde wünscht nachträglich eine Änderung der Konstruktion. Um unterschiedliche Betonmischer befüllen zu können, soll das Förderband hydraulisch in der Höhe verstellbar sein. Ø200 (Durchmesser der Bandrolle) 1800 6000 . + 1550 S + Bolzen Getriebe M1 230V Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 3.1 Dimensionierung eines Zylinders (10 Punkte) Dimensionieren Sie den erforderlichen Kolbendurchmesser (in 5mm Schritten) des Hydraulikzylinders ( = 90 %). Gehen Sie dabei von einer Gewichtskraft des Bandes von 10,5 KN im Schwerpunkt aus. Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 3.2 Überprüfung eines Bolzens (8 Punkte) Der Zylinder wird unten zweischnittig von einem Bolzen gehalten. Dafür sind 8 mm Bohrungen für einen 8 mm Bolzen vorgesehen. Überprüfen Sie, ob dieser Bolzen geeignet ist. Leiten Sie gegebenenfalls konkrete Änderungsvorschläge ab. Gehen Sie von einer Zylinderkraft von 8000 N und einem Sicherheitsfaktor von 4,5 aus. Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… Optionale Lerngebiete (Metro 3, 4, 5 oder die optionale Metro) 4 Aufgabe (Metro 3) (30 Punkte) - Regelung Beton der im Tunnelbau verwendet wird, muss ein chemischer Zusatz beigemischt werden. Ein besonders homogenes Betongemisch erhält man, wenn Beton und Zusatz bei einer festen Temperatur von 45°C vermischt werden. Aus diesem Grund wird außen am Betonsilo eine Heizung angebracht, die über eine Regelung (PID Regler) die Verarbeitungstemperatur konstant halten soll. Die Ist-Temperatur wird über einen PT100 Sensor gemessen. 4.1 Regelstruktur (7 Punkte) Beschreiben Sie anhand einer Skizze die Regelstruktur und benennen Sie alle regelungstechnische Größen. Ermitteln Sie mögliche Störgrößen. 4.2 Streckenidentifikation (6 Punkte) Die folgende Sprungantwort der Regelstrecke (Ks=1) wurde durch einen Versuch ermittelt. Beschreiben Sie den Typ der Regelstrecke und nennen Sie 3 weitere Typen. Identifizieren Sie die Regelstrecke und ermitteln Sie die Streckenparameter Tu und Tg Temperatur 1 Division = 5 °C Start 1 Division = 5 Minuten Zeit 4.3 Reglerentwurf (3 Punkte) Ermitteln Sie die Formeln für die optimalen Reglereinstellungen nach Chien, Hrones und Reswick des PID Reglers für Führungsverhalten mit einem maximalen Überschwingen von 20%. Und berechnen Sie die Reglerparameter, für eine Regelstrecke mit den Streckenparametern Tu = 20s und Tg = 5min. Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… Optimale Reglereinstellung nach Chien, Hrones und Reswick bei bekannten Regelstreckendaten Gütekriterium Überschwingen nach Gegenseite Regler20% von xm, kürzeste Schwingungsdauer Verhalten P PI Aperiodischer Regelvorgang mit kürzester Dauer Störung Führung Störung Führung kp 0,71/ks Tg/Tu 0,71/ks Tg/Tu 0,31/ks Tg/Tu 0,31/ks Tg/Tu kp 0,71/ks Tg/Tu 0,61/ks Tg/Tu 0,61/ks Tg/Tu 0,351/ks Tg/Tu Tg 2,3 Tu 4 Tu 1,2 Tg kp 1,2 1/ks Tg/Tu 0,951/ks Tg/Tu 0,951/ks Tg/Tu 0,61/ks Tg/Tu Tn PID 2 Tu 0,42 Tu Tn Tv 1,35 Tg 0,47 Tu 2,4 Tu 0,42 Tu Tg 0,5 Tu 4.4 Simulation (11 Punkte) Für das Erwärmen des Betongemisches möchten Sie eine Regelung programmieren. Da ihnen die Anlage zu Tests nicht zur Verfügung steht, soll das dynamische Verhalten des Aufheizvorgangs simuliert werden. Entwickeln sie ein SPS Programm in FUP, mit dem sich das dynamische Verhalten eines Verzögerungsglieds 1. Ordnung (PT1) simulieren lässt. Realisieren Sie die optimierte Formel aus der folgenden mathematischen Beschreibung. Bestimmte Regelstrecken lassen sich in guter Näherung durch ein Verzögerungsglied 1. Ordnung (PT1) nachbilden. FB5 Behaelter u T deltaT y Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 1 4.5 Test (3 Punkte) Kann der Aufheizvorgang des Betongemisches mit dem in 4.4 entwickelten PT1 Glied simuliert werden. Beurteilen Sie ihre Entscheidung unter Einbeziehung der Sprungantwort aus 4.2. 1 Quelle: Wikipedia, http://de.wikipedia.org/wiki/PT1-Glied, 14.11.2012, 16:00 Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 4 Aufgabe (Metro 4) (30 Punkte) Für die Produktion von Anhängern, muss im Montageverlauf eine Metallschiene montiert werden. Um den Produktionsprozess zu optimieren, soll dieser Fertigungsschritt in Zukunft von einem Roboter ausgeführt werden, der mit einer Schraubereinheit als Werkzeug ausgestattet ist. Aufgabe 4.1 (3 Punkte) In dem genannten Beispiel wird der Roboter als Montageroboter eingesetzt. Nennen Sie weitere Einsatzgebiete von Industrierobotern. Aufgabe 4.2 (3 Punkte) Nennen Sie mindestens drei Koordinatensysteme, die in der Robotertechnik zur Anwendung kommen: Welches Koordinatensystem wird im Technologieschema verwendet? Aufgabe 4.3 (3 Punkte) Die Kinematik eines Roboters ist unter anderem abhängig von der Anzahl der Achsen. Benenne die im Technologieschema ersichtlichen Achsen des Roboters. Aufgabe 4.4 (15 Punkte) Entwickeln Sie ein Programm für die Montage der Metallschiene unter Verwendung der untenstehenden Vorgaben. Dokumentieren Sie das Programm mit aussagekräftigem Kommentar. 60 70 80 'Variablen (Ein-/Ausgang) DEF IO Start_Mont = BIT,9 DEF IO End_Mont = BIT,10 90 ' Positionen 100 DEF POS AUX_Sch 110 DEF POS AUX_Pal 120 DEF POS OfSt_Sch (Schiene) 130 DEF POS OfSt_Pal lette) 140 150 160 170 'Variablen (Intern) DEF INTE Slow DEF INTE Fast DEF INTE i ' Starte Schraubvorgang ' Schraubvorgang beendet ' Positionsvariable für die Montageposition (Schiene) ' Positionsvariable für die Aufnahmeposition (Palette) ' Offset-Variable zum Verfahren zur nächsten Position ' Offset-Variable zum Verfahren zur nächsten Position (Pa- ' Variable für reduzierte Geschwindigkeit ' Variable für hohe Geschwindigkeit ' Variable für Schleifen 180 'Variablen initialisieren 190 i=1 ' initialisieren der Variable i mit einem Startwert Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 200 OfSt_Sch = (0,0,+39,0,0) ' Offset zum Verfahren zur nächsten Position (Schiene Z+39) 210 OfSt_Pal = (0,+39,0,0,0) ' Offset zum Verfahren zur nächsten Position (Palette Y+39) 220 Slow = 50 ' initialisieren der Variable Slow mit einem Startwert 230 Fast = 100 ' initialisieren der Variable Fast mit einem Startwert Positionen P1=(339.00,0.00,550.00,0.00,90.00) *// Grundstellung P3=(309.75,17.99,37.99,-89.99,179.83,0.00) *// Schraube 1 Palette P5=(271.00,-101.08,38.00,-90.00,180.00) *// Schraube 1 Schiene Aufgabe 4.5 (6 Punkte) In der Robotertechnik können Werkstückpositionen mittels eines Paletten-Befehls angefahren werden. Diskutieren Sie die Vorteile dieses Befehls und skizzieren Sie die Integration des Befehls für die oben genannte Werkstückverschraubung. Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Mechatronik Datum: ……………………… 4 Aufgabe (Metro 5) (30 Punkte) Nach der Inbetriebnahme eines Transportbandes wurde die Abtriebswelle des hierfür vorgesehenen Schneckenradgetriebes durch Gewaltbruch zerstört! Aus den noch vorhandenenUnterlagen sind folgende Daten bekannt: Pe = 1,79 kW (Antriebsleistung) n1 = 2800 min-1 iges = iStirniSchnecke = 34,94 Ft2 = Fa1 = 4908,8 N Fr2 = Fr1 = 1885,6 N Fa2 = Ft1 = 1661,5 N Weiterhin ist aus den Zeichnungen zu entnehmen, dass der Abstand l zwischen den beiden LagernC und D61 mm beträgt,das Schneckenrad mittig zwischen den beiden Lagern positioniert ist und der Durchmesser der gefährdeten Stelle d = 26 mm beträgt. Überprüfen Sie, ob die Welle aus C45 mit einer zulässigen Biegewechselspannung vonWzul.=320 N/mm2 und einer zulässigen Torsionsspannung zul = 340 N/mm2gefertigt werden kann! Hinweis: Zur Beurteilung ermitteln bzw. berechnen Sie: a) zeichnerisch und rechnerisch das maximale Biegemoment Mzmax in der x-y-Ebene und Mzmax in der x-z-Ebene, die Kräfte in den beiden Ebenen sind unten skizziert. b) das resultierende Mbmax, c) das TorsionsmomentMt, Seinen Mbmax = 102,6 Nm und Mt = 213,16 Nm d) das VergleichsmomentMv und e) den erforderlichen Wellendurchmesser d! Skizze: b/2 b/2 1) Kräfte in der x-y-Ebene FCy FDy Ft2 Klausur 2012 Berufliches Gymnasium Technik 300 min Name: Datum: ……………………… 2) Kräfte in der x-z-Ebene b/2 Mechatronik b/2 Fa2 FCz Fr2 FDz