Erwartungshorizont
Werbung

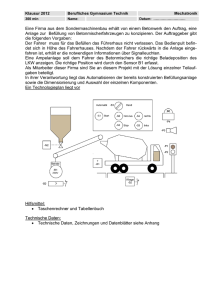
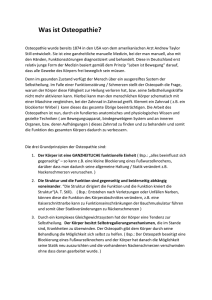
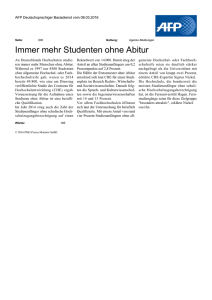
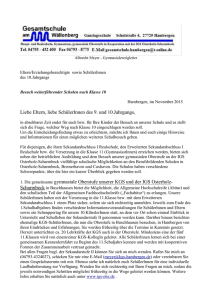
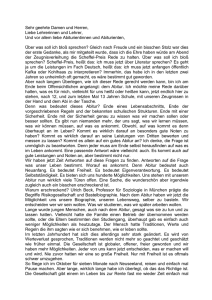
Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Unterrichtliche Voraussetzungen Die Aufgabenstellung ergibt sich aus der Kursfolge (Beschluss der Fachkonferenz): 12.1 Mechatronische Systeme analysieren und erweitern 12.2 Technische Prozesse steuern 13.1 Handhabungssysteme programmieren und optimieren Bezug der Aufgaben zum Unterricht Durch den vorliegenden Abiturvorschlag werden Inhalte aus drei Kurshalbjahren bzw. Lerngebieten abgedeckt. Die erforderlichen Kenntnisse sind im Rahmen praxisorientierter Problem- und Aufgabenstellungen erarbeitet worden. Dabei sind die konkreten Aufgaben dieses Vorschlags im Unterricht nicht eingehend behandelt worden. Aufgabe 1 und Aufgabe 3: Diese Aufgaben der Klausur beziehen sich auf den Kurs 12.1 des Lerngebietes „Mechatronische Systeme analysieren und erweitern“. Innerhalb dieses Kurses wurden einfache Berechnungen zum zentralen- und allgemeinen Kräftesystem durchgeführt. Weiterhin wurden elektrotechnische Grundlagen zum Verhalten elektrischer Betriebsmittel in Gleich- und Wechselstromkreisen behandelt. Zur praktischen Umsetzung wurden Versuche im Labor durchgeführt. Aufgabe 2 Die Aufgabe bezieht sich im Wesentlichen auf den Kurs 12.2 des Lerngebietes „Technische Prozesse steuern“. An unterschiedlichen Lehrbeispielen und anhand von Anlagensimulatoren wurden in diesem Kurs die Lerninhalte erarbeitet. Dabei wurden u. a. Schaltungen mit und ohne Speicherverhalten sowie Ablaufsteuerungen thematisiert. Den Schülerinnen und Schülern standen für die Programmierung die Hard- und Software der Firma Siemens und die Software Omegon zur Verfügung. Aufgabe 4 Die Aufgabe bezieht auf den Kurs 13.1 des Lerngebietes „Handhabungssysteme programmieren und optimieren“. In diesem Kurs planten und programmierten die Schüler ein Handhabungssystem bestehend aus einem Roboter und einer SPS-gesteuerten Zuführstation. Um das Handhabungssystem zu programmieren wurden die Grundlagen der Robotik erarbeitet und Programmablaufbeschreibungen entwickelt. Den Schülerinnen und Schülern standen für die Programmierung und Parametrierung der Programme Roboter der Firma Mitsubishi und SPS-Anlagen der Firma Siemens zur Verfügung. Im Praxisunterricht wurden unter Berücksichtigung von Sicherheitsaspekten die Steuerungen der Automatisierungskomponenten in Betrieb genommen. BBS ……………………………………………………………… Seite 1 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Erwartungshorizont Anforderungsbereiche Auf- Erwartete Schülerleistungen Bewertung ∑ gabe I 1.1 3 3 4 4 Teilsysteme der Anlage nennen (5 Nennungen) und deren Funktion erläutern 1.2 Hydraulikschaltung beschreiben 1.3 Informationen zur Pumpenauslegung berechnen Fläche Volumenstrom 1.4 Informationen zum Pumpenantrieb ermitteln 1.5 Hydraulikventil überprüfen Summe Aufgabe 1 2.1 Spannungsteiler skizzieren und berechnen 2.2 Funktion des Reflexions-Lichttasters beschreiben und den Schaltabstand berechnen 2.3 Variablen in einer Zuordnungsliste darstellen richtige Zuordnung Ein- u. Ausgänge 2.4 Entwicklung des Grafcets für die Bohranlage Normgerechte Darstellung Richtige Funktionsweise Summe Aufgabe 2 3.1 Dimensionierung einer Saugeinrichtung Dabei Ermittlung Masse 3.2 Überprüfen einer Sicherheitseinrichtung Dabei Ermittlung Federlänge 3.3 Skizzieren eines Pneumatikplans Summe Aufgabe 3 4.1 Benennen der Roboterachsen 4.2 Erläutern von Einsatzgebieten 4.3 Nennen von Koordinatensystemen 4.4 Erläutern von Interpolationsverfahren 4.5 Entwickeln und dokumentieren eines Roboterprogramms Summe Aufgabe 4 Summe BBS ……………………………………………………………… II III 2 2 6 11 8 3 2 0 3 2 4 6 2 19 6 3 5 2 8 6 6 11 14 10 10 4 2 16 35 6 6 0 3 3 3 2 2 6 10 4 8 2 16 3 3 3 4 9 9 8 12 31 40 9 17 30 29 100 Seite 2 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Lösungsvorschlag Lösungen Aufgabe 1 zu 1.1 1. 2. 3. 4. 5. Magazin Rohlinge in der Bohrstation Bohrstation Bohrloch in Rohling Förderband Transportiert Zahnrad und Welle zur Fügestation Positionierungseinheit Nimmt Zahnrad mittels Sauger vom Träger und positioniert es auf die Welle Hydraulikpresse Presst Zahnrad auf die Welle zu 1.2 M11 schaltet 1V1. Öl strömt durch 1V2 ungedrosselt (Eilgang). Sensor MB12 schaltet M13. Öl-Ström wird durch 1V3 gedrosselt (Arbeitsgang). M13 schaltet 1V2. Sensor B13 schaltet M11 und M13 aus und M12 ein. 1V1 schaltet um, 1V2 schaltet zurück. Kolben fährt schnell ein (Rückhub). Sensor B11 schaltet M12 ab (Ruhehestand). zu 1.3 BBS ……………………………………………………………… Seite 3 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik zu 1.4 Drehzahl Leistung oder Drehmoment zu 1.5 Ja, da im Ruhezustand die Pumpe das Öl nur in den Tank pumpen muss. Daher muss die Pumpe nur einen geringen Druck aufbringen: Wenig Drehmoment und Leistung am Motor; Wenig Verschleiß und Energieverbrauch. BBS ……………………………………………………………… Seite 4 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Lösungen Aufgabe 2 zu 2.1 RV UB=24V RM UM=0...10V zu 2.2 Licht wird in einem bestimmten Winkel abgestrahlt, trifft auf das zu erfassenden Objekt und wird reflektiert (Einfallswinkel = Ausfallswinkel). S 5° 5cm E BBS ……………………………………………………………… Seite 5 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik zu 2.3 Symbol Adresse Datentyp Kommentar S1 E 0.0 BOOL Start des Bohrvorganges B7 E 0.6 BOOL Zahnrad im Magazin vorhanden B8 E 0.7 BOOL Zylinder 2A1 in VE Zahnrad gespannt B9 E 1.0 BOOL Zylinder 2A1 in HE bereit zum Ausschieben B10 E 1.1 BOOL Zylinder 2A2 VE Zahnrad nach Bohrung auswerfen B11 E 1.2 BOOL Zylinder 2A2 HE Zahnrad nach Bohrung auswerfen B12 E 1.3 BOOL Bohreinheit unten B13 E 1.4 BOOL Bohreinheit Geschwindigkeitswechsel B14 E 1.5 BOOL Bohreinheit oben B15 E 1.6 BOOL Zahnrad in Spannvorrichtung angekommen P3 A 6.2 BOOL Bohrvorgang aktiv M1 A 6.3 BOOL Zylinder 2A1 ausfahren: Zahnrad in Spannvorrichtung befördern und spannen M2 A 6.4 BOOL Zylinder 2A1 einfahren M3 A 6.5 BOOL Zylinder 2A2 einfahren M4 A 6.6 BOOL Zylinder 2A2 ausfahren: Zahnrad auswerfen M5 A 6.7 BOOL Bohrspindel einschalten M6 A 7.0 BOOL Zylinder 1A1 im Eilvorgang abwärts M7 A 7.1 BOOL Zylinder 1A1 im Eilvorgang zurück M8 A 7.2 BOOL Ansteuerung mit M6 für Arbeitsvorgang BBS ……………………………………………………………… Seite 6 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik zu 2.4 BBS ……………………………………………………………… Seite 7 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Lösungen Aufgabe 3 zu 3.1 Gewicht BBS ……………………………………………………………… Seite 8 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik zu 3.2 zu 3.3 M1 BBS ……………………………………………………………… Seite 9 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Lösungen Aufgabe 4 zu 4.1 1 x Translatorische/ 2 x Rotorische zu 4.2 1. 2. 3. 4. 5. 6. 7. Handhabungseinrichtung (Palettierung, Stapeln, Verpacken) Schweißroboter Schneidroboter (Fräsen, Sägen, Schneidbrenner) Fügeroboter (Druckfügen, Kleben & Abdichten) Messroboter (Messen, Testen) Lackierroboter (Lackieren, Polieren) Schleifroboter (Bandschleifen) zu 4.3 In der Robotik werden die folgenden kartesischen Koordinatensysteme verwendet Weltkoordinatensystem (global, meist in einer Ecke des Raums) Basiskoordinatensysteme (im Sockel jedes Roboters) Effektor- oder Toolkoordinatensysteme (in der Effektorspitze jedes Roboters) Objektkoordinatensysteme (an jedem manipulierten Objekt) Benutzer- oder Userkoordinatensysteme (meist an feststehenden Objekten der Arbeitsumgebung) zu 4.4 Kreisinterpolation (MVR) Bewegung auf einer Kreisbahn Linearinterpolation (MSV) Bewegung auf einer linearen Strecke Gelenkinterpolation (MOV) Bewegung ohne Festlegung des Weges (PTP=Point to Point) zu 4.4 Positionen P1=(339.00, 0.00, 550.00,0.00, 0.00, 0.00)(6,0) *// Grundstellung P2=(370.00, 0.00, 38.00, 0.00, 0.00, 0.00)(6,0) *// Aufnahme Transportband P12=(241.00,158.10,38.00, 0.00, 0.00, 0.00)(6,0) *// Startpunkt des Kartons P13=(241.00,118.10,38.00, 0.00, 0.00, 0.00)(6,0) *// Spaltenendpunkt des Kartons P15=(361.00,118.10,38.040.00, 0.00, 0.00)(6,0) *// Paletteneckpunkt des Kartons P14=(361.00,158.10,38.0,20.00, 0.00, 0.00)(6,0) *// Zeilenendpunkt des Kartons Grundstruktur MB4-Programm: Lösung: 10 20 30 40 50 60 70 80 ' ' ' ' ************************* ** Zahnrad Palette ** ** Abiturprüfung ** ***************** **** DEF POS PKarton DEF INTE Slow DEF INTE Fast BBS ……………………………………………………………… Seite 10 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik 90 100 110 120 130 140 DEF DEF DEF DEF DEF DEF INTE NumPos INTE B20OLD IO B20 = BIT,8 'Zahnrad auf Transportband angekommen IO S21 = BIT,9 'Quittiertaste: Karton vom Bediener entnommen IO P30 = BIT,10 'Karton voll PLT 1,P12,P13,P14,P15,3,3,1 'Karton als Palette 150 160 170 180 NumPos Slow = Fast = B20OLD 190 200 210 220 *MAINLOOP GOSUB *Packen GOTO *MAINLOOP END 230 240 250 260 *Packen MOV P1 'Grundstellung HOPEN 1 FOR NumPos=1 to 9 'Schleife zum neunmaligen Anfahren der Positionen 270 280 290 300 310 ' **Warte auf Zahnrad B20OLD = B20 *WarteZ IF B20 = 1 AND B20OLD = 0 THEN *EndeZ ELSE *WarteZ *EndeZ 320 330 340 350 360 370 380 390 400 410 420 430 440 450 MOV P2,-20 SPD Slow MVS P2 'Aufnahmeposition DLY 0.5 HCLOSE 1 DLY 0.5 MVS P2,-20 PKarton =PLT 1,NumPos MOV PKarton, -20 MVS PKarton 'Ablegen auf den entsprechenden Platz im Karton DLY 0.5 HOPEN 1 DLY 0.5 Next NumPos 460 470 480 490 500 510 520 530 ' **Warte Quittierung *WarteB P30 = 1 'Meldeleuchte Karton voll IF S21 = 1 AND THEN *EndeB ELSE *WarteB *EndeB P30 = 0 SPD Fast RETURN =1 50 100 = 0 'Hauptschleife BBS ……………………………………………………………… Seite 11 von 12 Document1 Abitur 2013 BG Technik - Mechatronik Vorschlag A -M4 eA Lehrermaterial Fach: Technik Die Umrechnung der Gesamtpunkte in KMK-Punkte ergibt sich nach folgendem Bewertungsmaßstab: Ab Prozent: 95 90 85 80 75 70 65 60 55 50 45 40 34 28 20 00 Punkte: 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00 BBS ……………………………………………………………… Seite 12 von 12 Document1