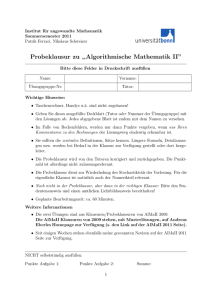
bis KW51
Werbung

Markovprozesse und Warteschlangensysteme M Gruber WS 2012/13, Version vom 10. Dezember 2012 Inhaltsverzeichnis 1 Zeitdiskrete Markovketten 1.1 1.2 1.3 1.4 5 Denitionen und Grundeigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . 5 1.1.1 . . . . . . . . . . . . . . . . . . . . . . . 5 Ein Beispiel mit zwei Zuständen 1.1.2 (; P )-Markovkette (Denition) . . . . . . . . . . . . . . . . . . . . . . . . 7 1.1.3 Ein Beispiel mit drei Zuständen . . . . . . . . . . . . . . . . . . . . . . . 9 Stoppzeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 1.2.1 Stoppzeiten (Denition) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 1.2.2 Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 1.2.3 Mittlere Eintrezeiten (mean hitting times) . . . . . . . . . . . . . . . . 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.3.1 Klasseneigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 1.3.2 Rekurrenz und Transienz . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 1.3.3 Endliche Kommunikationsklassen . . . . . . . . . . . . . . . . . . . . . . . 20 1.3.4 Unendliche Kommunikationsklassen . . . . . . . . . . . . . . . . . . . . . 21 1.3.5 Irrfahrten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 Kommunikationsklassen Stationäre (invariante) Verteilungen . . . . . . . . . . . . . . . . . . . . . . . . . 1.4.1 Existenz und Eindeutigkeit stationärer Verteilungen 1.4.2 Positive Rekurrenz, Nullrekurrenz 24 . . . . . . . . . . . . 24 . . . . . . . . . . . . . . . . . . . . . . 27 2 Warteschlangen 2.1 Einige Eigenschaften der Exponentialverteilung 2.2 Der Poissonprozess E () 29 . . . . . . . . . . . . . . . . 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 2.2.1 Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 2.2.2 Eine Anwendung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 2.2.3 Faltung von Verteilungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 2.2.4 n-fache Faltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 2.3 Der Satz von Little . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 2.4 M/M/1-Warteschlangen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 2.4.1 Übergänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 2.4.2 Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 2.4.3 Beispiel 42 ((t))t0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Inhaltsverzeichnis 2.5 2.6 2.7 4 M/M/1 mit Warteschlangenbeschränkung . . . . . . . . . . . . . . . . . . . . . . 42 2.5.1 Gleichgewicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 2.5.2 Ankunftsrate bedienter Kunden . . . . . . . . . . . . . . . . . . . . . . . . 43 Geburts-Todes-Prozesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 2.6.1 Abhängigkeiten der Raten . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 2.6.2 Gleichgewichtsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 1-Warteschlangen M/M/ 1 Zeitdiskrete Markovketten 1.1 Denitionen und Grundeigenschaften lec01 1.1.1 Ein Beispiel mit zwei Zuständen Beispiel 1.1 ([Nor97], Example 1.1.4) Ein dynamisches System kann im Zustand 1 oder im Zustand 2 sein. Ist es im Zustand 1, geht es beim nächsten Schritt mit Wahrscheinlich- 2 [0; 1] in den Zustand 2 über; mit Wahrscheinlichkeit 1 bleibt es im Zustand 1. Ist es im Zustand 2, geht es beim nächsten Schritt mit Wahrscheinlichkeit 2 [0; 1] in den Zustand 1 über; mit Wahrscheinlichkeit 1 bleibt es im Zustand 2. keit Im Weiteren betrachten wir nur den nichttrivialen Fall + > 0. Die Systemdynamik beschreibt man am besten mit Hilfe einer stochastischen Matrix: " # 1 P= : 1 Stochastische Matrizen haben nichtnegative Komponenten, die sich zeilenweise zu 1 sum- mieren. Angenommen, das System bendet sich mit Wahrscheinlichkeit mit Wahrscheinlichkeit 2 1 im Zustand 1 und h Dann ist es nach dem nächsten Übergang mit Wahrscheinlichkeit 1 + 2 (1 ) im Zustand 2. Das Anfangsverteilung mit der Übergangsmatrix P liefert genau diese Werte: Zustand 1 und mit Wahrscheinlichkeit h 1 2 i " i = 1 2 . 1 (1 ) + 2 im im Zustand 2, d.h. es hat die Anfangsverteilung Produkt der # h i 1 = 1 (1 ) + 2 1 + 2 (1 ) 1 (1.1) Die Wahrscheinlichkeitsverteilung auf der rechten Seite von (1.1) ist wiederum die Anfangsverteilung für den darauolgenden Übergang das Systems. Die Wahrscheinlichkeiten dafür, dass das System nach insgesamt n Schritten im Zu- 5 1 Zeitdiskrete Markovketten stand 1 bzw. Zustand 2 ist, stehen im Wahrscheinlichkeitvektor h 1 2 Um die Matrixpotenzen Pn i " #n 1 : 1 ezient berechnen, diagonalisiert man P am besten vorher. Wie man Matrizen diagonalisiert, lernt man in der Linearen Algebra. (Ich empfehle sehr [Str09] und die zugehörigen Videolektionen1 .) Wenn P die Diagonalisierung " 1 P =U hat, ist Pn Die Gröÿen =U 1 " 1 ; 2 # 1 0 U 0 2 # n1 0 U: 0 n2 sind die Eigenwerte von hörige Eigenvektoren2 . P. Die Matrix U enthält zeilenweise zuge- Eine Besonderheit stochastischer Matrizen ist, dass immer mindestens ein Eigenwert gleich 1 ist. Nehmen wir also 1 = 1 an. Die Summe der Diagonalelemente von P , ist stets gleich der Summe der Eigenwerte. 2 = 1 + 2 = 1 + 2 . Also ist 2 = 1 und die Spur von Pn =U 1 " + + i " 1 2 " In unserem Fall heiÿt das # # 1 = 1: h 1 = + 1 Und hier ein linksseitiger Eigenvektor zum Eigenwert h d.h. 1 0 U: 0 (1 )n Hier ist ein linksseitiger(!) Eigenvektor zum Eigenwert h P, + i : 2 = 1 : # h i 1 = (1 ) 1 1 : 1 1 1 i http://ocw.mit.edu/courses/mathematics/18-06-linear-algebra-spring-2010/video-lectures/ Bei Markovketten betrachtet man Eigenvektoren als Zeilenvektoren, die man von links an die Übergangsmatrix multipliziert. Das ist vielleicht etwas ungewohnt. Wenn Sie lieber mit der üblichen Darstellung Matrix mal Spaltenvektor arbeiten möchten, brauchen Sie nur alles zu transponieren. 6 1.1 Denitionen und Grundeigenschaften Tragen wir diese Eigenvektoren zeilenweise in eine Matrix ein, erhalten wir 3 2 U Die Inverse von U ist = 4 + 1 U 1=4 1 Die stochastische Matrix Pn 1 3 + 5 : + hat somit die Darstellung 3 2 + 5 : 1 2 U: 2 3 2 3 # " 0 + 5 1 4 + n 1 + 0 (1 ) 2 3 ( +1)n + ( +1)n n 5: = 4 ( ++1)n ( ++1) + + + p(n) p(12n) 5 41 = P n = 4 11 1 p(21n) p(22n) p(ijn) geben darüber Auskunft, mit welcher vom Zustand i aus nach n Schritten erreicht wird. Die Gröÿen + 5 1 Wahrscheinlichkeit der Zustand h Zum Abschluss sei noch bemerkt, dass der Eigenvektor + + j i einen Gleichge- wichtszustand des Systems beschreibt: h + + i " # h 1 = + 1 + i : 1.1.2 (; P )-Markovkette (Denition) Im allgemeinen betrachten wir stochastische Prozesse (Xn )n0 auf einem Wahrscheinlichkeits- ( ; F ; P) mit Werten in einem endlichen oder abzählbar undendlichen Zustandsraum I . Die Zufallsvariable Xn beschreibt die Position des Prozesses im Zustandsraum I zur Zeit n. raum Denition 1.1 Der Prozess (Xn )nn ist eine (; P )-Markovkette (kurz: (; P )-markovsch), wenn 1. der Prozess mit der Wahrscheinlichkeitsverteilung P(X0 = i) = i für i2I = (i )i2I startet, d.h. wenn gilt und 2. und wenn der Prozess gedächtnislos ist, d.h. wenn P(Xn+1 = ii für i0 ; : : : ; in+1 2 I gilt, wobei +1 n j X0 = i0; : : : ; Xn = in) = pi P = (pij )i;j 2I i +1 n n (1.2) eine stochastische Matrix ist. 7 1 Zeitdiskrete Markovketten Das Besondere an (1.2) ist, dass die bedingte Wahrscheinlichkeit für den Übergang vom Zustand in zum Zustand in+1 nicht von der Entwicklung des Prozesses bis zur Erreichung des Zustands in abhängt. Das ist die für Markovprozesse bezeichnende Gedächtnislosigkeit des Prozesses. Eine alternative Charakterisierung für Satz 1.1 ([Nor97], Theorem 1.1.1.) (; P )-markovsch Der Prozess gibt folgender (Xn )n0 ist genau dann (; P )-markovsch, wenn für seine Pfade gilt: P(X0 = i0 ; : : : ; Xn = in ) = i0 pi0 i1 pi n Beweis 1 in : Siehe [Nor97]. I sind die, bei denen die Wahrscheinlichkeitsmasse 1 auf einen Zustand i 2 I konzentriert ist. Wir bezeichnen sie mit i . Für i = (ij )j 2I gilt ij = [i = j ] (Iversonklammer3 ). Spezielle Wahrscheinlichkeitsverteilungen auf dem Zustandsraum (; P )-markovschen Prozess (Xn )n0 unter der bedingten Wahrscheinlichkeit P(: : : j Xm = i) (mit festem m und festem i 2 I ) betrachten. Man konzentriert dann die Wahrscheinlichkeit auf Pfade, die sich zur Zeit m im Zustand i benden. Unter der bedingten Wahrscheinlichkeit P(: : : j Xm = i) sind die restlichen Pfadstücke ab dem Zeitpunkt m die Pfade einer (i ; P )-Markovkette. Man nennt diese Eigenschaft die Markov-Eigenschaft: Man kann die Pfade eines Satz 1.2 (Markov-Eigenschaft) (; P )-markovschscher Prozess. Dann ist der Prozess (Xm+n )n0 unter der bedingten Wahrscheinlichkeit P(: : : j Xm = i) eine (i ; P )-Markovkette, die unabhängig von den Zufallsvariablen X0 ; : : : ; Xm ist. Formal: Für Ereignisse A aus der -Algebra F (X0 ; : : : ; Xm ) gilt Sei (Xn )n0 ([Nor97], Theorem 1.1.2.) ein P(fXm = im ; : : : ; Xm+n = im+n g \ A j Xm = i) = ii pi m i +1 pim+n 1 im+n P(A j Xm m m = i): Bemerkung 1.1 Es trägt zum Verständnis bei, wenn Sie in Satz 1.2 speziell A = setzen und P(Xm = i) > 0 annehmen. Dann ist nämlich P(A j Xm = i) = 1 und es steht P(Xm = im ; : : : ; Xm+n = im+n j Xm = i) = ii pi m i +1 pim+n 1 im+n m m da. Man beachte auch, dass die rechte Seite in Wirklichkeit nicht von m abhängt: P(Xm = im ; : : : ; Xm+n = im+n j Xm = i) 3 8 Die Iversonklammer hat den Wert 1, wenn das Prädikat in der Klammer wahr ist, sonst 0. 1.1 Denitionen und Grundeigenschaften und P(X0 = im ; : : : ; Xn = im+n j X0 = i) stellen die gleichen Werte dar, falls i > 0 und P(Xm = i) > 0 sind. Es ist daher sinnvoll, folgende Bezeichnung einzuführen: Pi (A) := P(A j X0 = i) Bemerkung 1.2 für A 2 F (X0 ; X1 ; : : :): (Xn )n0 den Prozess (Xm+n )n0 betrachtet, stellt 0 zurück und startet die Markovkette im Zustand i neu. Indem man anstelle von man die Prozessuhr von m auf Der Übergangsmechanismus bleibt gleich (sagt der Satz). n Schritte in der in der i-ten Zeile und In Beispiel 1.1 hat man gesehen, dass die Übergangswahrscheinlichkeiten für Matrix Pn stehen. Bezeichnen wir mit j -ten Spalte. Satz 1.3 ([Nor97], Theorem 1.1.3.) p(ijn) = die Komponente von Der Prozess (Xn )n0 sei Pn (; P )-markovsch. Dann gilt P(Xn = j ) = (P n )j (j -te Komponente von P n ); ( n) 2. Pi (Xn = j ) = P(Xn+m = j j Xm = i) = pij für alle m; n 0. 1. 1.1.3 Ein Beispiel mit drei Zuständen Beispiel 1.2 ([Nor97], Example 1.1.6) lec 02 Die Übergangsmatrix sei 2 3 0 1 07 6 6 P = 4 0 1=2 1=275 : 1=2 0 1=2 Als stochastische Matrix hat werte 2 und 3 P sicher einen Eigenwert 1 = 1. Um die weiteren Eigen- zu bestimmen, greifen wir auf die Tatsache (Lineare Algebra) zurück, dass die Spur bzw. Determinante einer Matrix gleich der Summe bzw. dem Produkt ihrer Eigenwerte ist: 1 = trace P = 1 + 2 + 3 Aus diesen Gleichungen folgt 2 = i=2 und und 1=4 = det P = 2 3 : 3 = i=2 = 2 (mit : kennzeichnen wir das Konjugiertkomplexe). 9 1 Zeitdiskrete Markovketten Wir schreiben die Eigenwerte in die Eigenwertematrix 3 2 1 0 6 6 = 40 i=2 0 0 0 7 0 75 : i=2 Zgehörigen Eigenvektoren sind h i u1 = 12 1 1 ; u2 = h i h i 1 i 1 = u2 : 1 + i 1 ; u3 = i i Wir schreiben die Eigenvektoren zeilenweise in die Eigenvektorenmatrix 2 6 1 2 U = 64 i i 3 1 17 1 + i 175 : 1 i 1 (Da man Eigenvektoren verschieden skalieren kann, ist unsere Eigenvektormatrix nur eine von vielen möglichen. Das macht aber nichts.) Die Beziehung zwischen Eigenwerten und Eigenvektoren wird in kompakter Form durch die Gleichung UP = U beschrieben. Auösung nach P liefert P 's Diagonalisierung: P = U 1 U: Die Berechung von Pn ist nun einfach: P n = P = U 1 n U: h Die Entwicklung des Systems mit der Anfangsverteilung P n von i wird duch beschrieben. Es ist von Vorteil, die Anfangsverteilung mit Hilfe der Eigenvektoren P = xU mit geeignetem Zeilenvektor x = U 1 . Dann P n = xUU 1 n U = xn U zu dieser schönen und nützlichen darzusellen, also in der Form kommt man nämlich wegen Formel: P n = x1 n1 u1 + x2 n2 u2 + x3 n3 u3 : In unserem konkreten Fall ist 2 U 10 = 1 2 3 2 5 6 1 = 62 45 2 5 1 5 1 5 3 10 + 25i i 10 i 10 3 1 2i 5 57 1 + i 7: 5 10 5 3 + i 10 10 (1.3) 1.1 Denitionen und Grundeigenschaften Betrachten wir nun drei elementare Anfangsverteilungen: h 1. i Fall = 1 0 0 . x die erste Zeile von U 1 In diesem Fall ist i h h 1+2i 5 x = x1 x2 x3 = 25 1 2i 5 i und wir haben h i h i ( i )n i x1 n1 u1 = 15 25 25 ; x2 n2 u2 = 1+2 5 2 i 1 + i 1 ; x3 n3 u3 = (x2 n2 u2 ) : Da die beiden letzten Ausdrücke zueinander konjugiert komplex sind, vereinfacht sich (1.3) zu P n = x1 n1 u1 + 2 Re(x2 n2 u2 ): Es ist n n2 = ( 2i )n = ( 12 )n cos n 2 + i sin 2 und h i h (1.4) i x2 u2 = 52 ; 15 ; 15 + i 15 ; 53 ; 25 ; folglich h Re(x2 n2 u2 ) = ( 12 )n cos n2 25 ; 1; 1 5 5 i + ( 12 )n sin n2 h 1 3 2 5; 5; 5 i : Insgesamt hat man also h i 1 0 0 Pn = h 1 5 2 5 2 5 i h + ( 21 )n 1 cos n2 25 ; Man sieht hier schön, wie das System für strebt: h n!1 i lim Pn = n!1 1 0 0 h 2. 1; 1 5 5 h 1 5 i + ( 21 )n 1 sin n2 h 1; 3; 2 5 5 5 i : gegen den Gleichgewichtszustand 2 5 2 5 i : i Fall = 0 1 0 . Nun ist x die zweite Zeile von U 1 h i h x = x1 x2 x3 = 25 2 i 10 2+i 10 i und wir haben i h h x1 n1 u1 = 51 25 52 ; x2 n2 u2 = 25 i ( 2i )n i i 1 + i 1 ; x3 n3 u3 = (x2 n2 u2 ) : 11 1 Zeitdiskrete Markovketten Es ist x2 u2 = h 1 3 1 10 ; 10 ; 5 i h + i 15 ; 1 1 10 ; 10 i ; folglich Re(x2 n2 u2 ) = ( 12 )n cos n2 h 1 3 1 10 ; 10 ; 5 i + ( 12 )n sin n2 h 1 1 1 5 ; 10 ; 10 i : Insgesamt hat man nun h i 0 1 0 Pn = h 3. h 1 5 2 5 2 5 i + ( 12 )n 1 cos n2 h 1 3 1 10 ; 10 ; 5 i + ( 21 )n 1 sin n2 h 1; 1 ; 1 5 10 10 i : i Fall = 0 0 1 . Nun ist x die dritte Zeile von U 1 i h h i x = x1 x2 x3 = 25 310i 3+ 10 i und wir haben h i h i 1 i 1 ; x3 n3 u3 = (x2 n2 u2 ) : x1 n1 u1 = 15 52 25 ; x2 n2 u2 = 310i ( 2i )n i Es ist x2 u2 = h 1 1 3 10 ; 5 ; 10 i +i h 3 2 1 10 ; 5 ; 10 i ; folglich Re(x2 n2 u2 ) = ( 12 )n cos n2 h 1 1 3 10 ; 5 ; 10 i + ( 12 )n sin n2 h 3 2 1 10 ; 5 ; 10 i : Insgesamt hat man h i 0 0 1 Pn = h 1 5 2 5 2 5 i + ( 12 )n 1 cos n2 h 1 1 3 10 ; 5 ; 10 i + ( 21 )n 1 sin n2 h 3 2 1 10 ; 5 ; 10 i : Alle weiteren Fälle sind Konvexkombinationen dieser drei Elementarfälle. 1.2 Stoppzeiten 1.2.1 Stoppzeiten (Denition) Denition 1.2 (Stoppzeit) zeit zu (Xn )n0 , wenn gilt Die Zufallsvariable T : ! f0; 1; 2; : : :g [ f1g ist eine Stopp- fT = ng 2 F (X0; : : : ; Xn) 12 für alle n 0: 1.2 Stoppzeiten Für eine Stoppzeit T bezeichnet F (X0; : : : XT ) die -Algebra der Ereignisse B mit B \ fT = mg 2 F (X0 ; : : : Xm ) für alle m: F (X0; : : : XT ) die T -Vergangenheit des Prozesses. Für ! 2 mit T (! ) < 1 interessiert typischerweise die gestoppte Zufallsvariable Man nennt ! 7! XT (!) (!); die wir als XT notieren. Satz 1.4 (Starke Markoveigenschaft) ([Nor97], Theorem 1.4.2.) Sei T eine Stoppzeit zum Markovprozess (Xn )n0 . Dann ist unter der Bedingung T < 1 und XT = i der Prozess (XT +n )n0 ebenfalls ein Markovprozess. M.a.W.: Für B 2 F (X0 ; : : : ; XT ) gilt P(fXT = j0 ; : : : ; XT +n = jn g \ B j T < 1; XT = i) : = Pi (X0 = j0 ; : : : ; Xn = jn ) P(B j T < 1; XT = i) Beweis [Nor97], pp.20. Bemerkung 1.3 Es trägt zum Verständnis bei, wenn Sie in Satz 1.4 speziell B = setzen und P(T < 1; XT = i) > 0 annehmen. Dann ist nämlich P(B j T < 1; XT = i) = 1 und es steht P(XT = j0 ; : : : ; XT +n = jn j T < 1; XT = i) = Pi (X0 = j0 ; : : : ; Xn = jn ) da. Bemerkung 1.4 Indem man anstelle von man die Prozessuhr von T auf 0 zurück (Xn )n0 den Prozess (XT +n )n0 betrachtet, stellt und startet die Markovkette im Zustand i neu. Der Übergangsmechanismus bleibt gleich (sagt der Satz). Denition 1.3 (Eintrezeit) fallsvariable mit der Konvention 1 an). Sei A I. Die Eintrezeit (hitting time) bei A ist die Zu- H A = inf fn 0 j Xn 2 Ag inf ; = 1 (d.h. für Pfade !, die A nie treen, nimmt H A (!) den Wert 13 1 Zeitdiskrete Markovketten Bemerkung 1.5 H A ist eine Stoppzeit, denn fT = ng = fX0 2= A; : : : ; Xn 1 2= A; Xn 2 Ag 2 F (X0; : : : ; Xn): Bemerkung 1.6 LA = supfn 0 j Xn 2 Ag (last exit time) Sei hAi := Pi (H A < 1) = P(H A < 1 j X0 = i): die Wahrscheinlichkeit, dass der in i startende Prozess die Zustandsmenge A in endlicher Zeit trit und sei hA := (hAi )i2I der Vektor dieser Wahrscheinlichkeiten. Bemerkung 1.7 Satz 1.5 hA ist i.a. keine Wahrscheinlichkeitsverteilung! Eine Konsequenz der Markov-Eigenschaft ist hAi = 1 für i 2 A ([Nor97], Theorem 1.3.2.) Lösung des Systems Beweis ist keine Stoppzeit. und hA hAi = X j 2I hAj pij für i 2= A: ist komponentenweise die kleinste nichtnegative hAi = 1 P hAi = j 2I hAj pij i 2 A; für i 2 = A: für [Nor97], pp.13. 1.2.2 Beispiele Beispiel 1.3 Sei P= " 1 0 0 0 # 1=2 0 1=2 0 . 0 1=2 0 1=2 0 0 0 1 Beispiel 1.4 (Gambler's ruin) Es ist hf24g = 1=3 und hf14g = 0 ([Nor97] Example 1.3.3) 0 < p = 1 q < 1, p00 = 1, pi;i+1 = p und pi;i 1 = q Für die Ruinwahrscheinlichkeit hi = Pi (H f0g < 1) gilt Seien für h0 = 1 hi = phi+1 + qhi 1 i = 1; 2; : : : Es liegt eine lineare Rekursion vor (homogner Fall). 14 i = 1; 2; : : :. 1.2 Stoppzeiten Die charakteristische Gleichung Im Fall p 6= q q 1 px + p x2 = 0 hat die Lösungen x 2 f pq ; 1g. (verschiedene Wurzeln) setzt man hi = A + B ( pq )i an und bestimmt Im Fall p<q A und B . ist das Casino im Vorteil. Da sein. Daraus folgt hi 1 für alle i A = 1 und hi = 1 für alle i, der sichere Ruin. gelten muss, muss B=0 p > q ist der Spieler im Vorteil. Da h0 = 1 sein muss, ist A + B = 1. Also ist hi = A + (1 A)( pq )i = ( pq )i + A(1 ( pq )i ). Man sieht, dass A 0 sein muss, denn andernfalls gibt es negative Werte für gewisse hi . Wegen der Minimalitätseigenschaft der hi folgt A = 0, also ist hi = ( pq )i . Im Fall Im Fall p=q (Doppelwurzel 1) setzt man hi = A + Bi hi = (A + Bi)1i ) und bestimmt hieraus A und B . hier A = 1; B = 0, also hi = 1, also auch hier der sichere Ruin. an (eigentlich: Beispiel 1.5 (Birth-and-death-chain) ([Nor97] Example und pi;i+1 = pi 0 mit pi + qi = 1 für i = 1; 2; : : :. Für Wegen 1.3.4) 0 hi 1 Seien folgt pi;i 1 = qi 0 hi = Pi (H f0g < 1) gilt (Markov-Eigenschaft!) h0 = 1; hi = pi hi+1 + qi hi 1 ; i = 1; 2; : : : : ui = hi 1 hi . Für pi ui+1 = pi hi pi hi+1 Betrachte und qi ui = qi hi 1 qi hi gilt pi ui+1 qi ui = 0, d.h. pi ui+1 = qi ui : (Dies lässt sich als Balancegleichung für den Zustand i interpretieren: Was von ihm nach links ausströmt und was von ihm nach rechts ausströmt, aber wieder zurückkommt, muss gleich sein.) Daraus lässt sich eine Formel für die ui+1 = mit ui gewinnen: qi q q1 ui = : : : = i u =: i u1 pi pi p1 1 q qq q q1 0 = 1; 1 = 1 ; 2 = 2 1 ; : : : ; i = i : p1 p2 p1 pi p1 15 1 Zeitdiskrete Markovketten Wegen X 1ki uk = h0 hi (\teleskopischeSumme00 ) gilt hi = 1 u1 mit X 0k<i k u1 0. Es geht nun darum, den richtigen Wert für u1 zu nden. Zwei Fälle müssen unterschieden werden: 1. 2. P P k k = 1: Dann muss u1 = 0 und damit hi = 1 sein. P < 1: Dann muss hi = 1 u1 0k<i k 0 und minimal sein. P P j i k P Dies ist für u1 = 1= k k der Fall. Also ist hi = 1 . k k k k 1.2.3 Mittlere Eintrezeiten (mean hitting times) Denition 1.4 (Mittlere Eintrezeit) Sei A I und i 2 I . Die mittlere der Zustandsmenge A bei Start in i ist der bedingte Erwartungswert kiA := Ei H A := mit der Konvention X n Eintrezeit bei n Pi (H A = n) + 1 Pi (H A = 1) 1 0 = 0. Sei kA = (kiA )i2I der Vektor der mittleren Eintrezeiten. Satz 1.6 ([Nor97], Theorem 1.3.5) kA die minimale nichtnegative Lösung des Systems kiA = 0 für i 2 A X kiA = 1 + kjA pij j 2= A Beweis 16 [Nor97], pp.17. für i 2= A 1.3 Kommunikationsklassen 1.3 Kommunikationsklassen 1.3.1 Klasseneigenschaften Der Zustandsraum der Markovkette Für Zustände i; j 2 I; i 6= j (Xn )n0 sei I N. denieren wir i ! j : , es existiert n 2 N mit p(ijn) > 0: i $ j : , i ! j und j ! i: Für i ! j sagt man von i erreicht man j und für i $ j i und j kommunizieren. Man hat die Eigenschaften i$j) j$i i $ j und j $ k ) i $ k i$i (Symmetrie) (Transitivität) (Reexivität) Die drei Eigenschaften Symmetrie, Transitivität und Reexivität denieren eine Beziehung, die man Äquivalenzrelation nennt. Mit Äquivalenzrelationen deniert man sogenannte Äquivalenzklassen . In unserem Falle sind diese Äquivalenzklassen (oder kurz: Klassen) so deniert: [i] : = fj 2 I j i $ j g (1.5) Man nennt sie kommunizierende Klassen . Die kommunizierenden Klassen sind entweder identisch oder disjunkt: Es gilt [i] = [j ] genau dann, wenn i $ j und [i] \ [j ] = ; genau dann, wenn i 6$ j . Der Zustandsraum zerfällt somit in kommunizierende Klassen. Sei C eine beliebige Teilmenge des Zustandsraums i, den es Zustand j enthält, der von i aus erreichbar ist (i 2 C ^ i ! j ) j 2 C ). Wir sagen, C Wenn C ist abgeschlossen , wenn C mit jedem Zustend ist genau dann abgeschlossen, wenn für alle Wir sagen, in C I. C ist oen , wenn C i2C und alle j 2= C gilt: enthält, auch jeden pij = 0. nicht abgeschlossen ist. C oen ist, gibt es mindestens einen Zustand auÿerhalb C der von von einem Zustand aus erreichbar ist. 17 1 Zeitdiskrete Markovketten Wir sagen, eine Markovkette ist irreduzibel , wenn ihr Zustandsraum aus einer einzigen kommunizierenden Klasse besteht. Wenn eine Markovkette irreduzibel ist, gibt es keine echte Teilmenge des Zustandsraums, die abgeschlossen ist. 1.3.2 Rekurrenz und Transienz T S Xn (!) = i für unendlich viele n ist, ist 0n<1 nk<1 fXk = ig. Man ndet dafür auch oft die Schreibweise fXn = i i.o.g (i.o. steht für innitely often ). Die Pfadmenge, auf der (Xn )n0 eine Markovkette. Ein Zustand i 2 I ist rekurrent, wenn Pi (Xn = i Ein Zustand i 2 I ist transient, wenn Pi (Xn = i Denition 1.5 Sei ) = 1 ist. i.o.) = 0 ist. i.o. Denition 1.6 (rte Durchgangszeit, rth passage time ) Sei (Xn )n0 eine Markovkette und i2I ein Zustand. Die induktiv denierten Zufallsvariablen Ti(0) (!) = 0; Ti(r) (!) = inf fn > Ti(r 1) (!) j Xn (!) = ig heiÿen rte Durchgangszeiten beim Zustand i. Für die erste Durchgangszeit schreibt man oft einfach Satz 1.7 ([Nor97], Theorem 1.5.3.) Sei Ti . (Xn )n0 eine Markovkette und i 2 I ein Zustand. Es gilt folgende Alternative: 1. 2. Pi (Ti < 1) = 1; es ist dann i rekurrent und 0n<1 p(iin) = 1; P Pi (Ti < 1) < 1; es ist dann i transient und 0n<1 p(iin) < 1. P Beweis Sei Vi = X die Zufallsvariable, die zählt, wie oft der Prozess Es ist Sei V~i Pi (Vi > 0) = Pi (Ti < 1). die zu Vi [Xk = i] 0<k<1 (Xn )n0 zum Zustand i nach dem Start aufsucht. analoge Zählfunktion für den Prozess Wegen der starken Markoveigenschaft ist für (XT +n )n0 . i k>0 Pi (Vi > k) = Pi (V~i > k 1; Ti < 1) = Pi (V~i > k 1) Pi (Ti < 1) = Pi (Vi > k 1) Pi (Ti < 1) 18 1.3 Kommunikationsklassen und damit Pi (Vi > k) = Pi (Ti < 1)k+1 : Pi (Ti < 1) = 1 ist, dann ist Pi (Vi = 1) = limk!1 Pi (Vi > k) = 1, d.h. (Xn )n0 ist rekurrent. Ist dagegen Pi (Ti < 1) < 1, dann ist Pi (Vi = 1) = 0 und (Xn )n0 transient. Man sieht hier: Wenn Die Zufallsvariable Ei Vi = Ei Vi hat den Erwartungswert X [Xk = i] = 0<k<1 X 0<k<1 Ei [Xk = i] = X 0<k<1 Pi (Xk = i) = X 0<k<1 ( n) pii : Für diesen Erwartungswert gilt aber auch Ei Vi = = = = = Wegen X 0<k<1 X k Pi (Vi X 0<k<1 0r<k X Pi (Vi = k) X [r < k] Pi (Vi = k) 0<k<1 0r<1 X X 0r<1 r<k<1 X 0r<1 = k) Pi (Vi = k) Pi (Vi > r): Pi (Vi > k) = Pi (Ti < 1)k+1 ist damit Ei Vi = Pi (Ti < 1) : 1 Pi (Ti < 1) Hiervon liest man ab: Im Rekurrenzfall ist P (n) 0n<1 pii = 1, im Transienzfall P ( n) 0n<1 pii < 1. Satz 1.8 (Class Property Theorem) ([Nor97], Theorem 1.5.4.) Die Zustände einer kommunizierenden Klasse C sind entweder alle rekurrent oder alle transient. Beweis Wir zeigen, wie sich die Eigenschaft transient von einem Zustand auf den anderen überträgt, wenn die beiden Zustände kommunizieren. Angenommen, der Zustand j ist transient und kommuniziert mit dem Zustand k. 2 N mit p(jkJ ) > 0. (K ) Und da j von k aus erreichbar ist, gibt es auch eine Zahl K 2 N mit pkj > 0. Da k von j aus erreichbar ist, gibt es auch eine Zahl Es gilt nun die Ungleichung (J +n+K ) pjj J p(jkJ ) p(kkn) p(kjK ) : (1.6) Auf beiden Seiten der Ungleichung stehen nämlich Wahrscheinlichkeiten dafür, vom Zustand J +n+K Schritten wieder zum Zustand j j nach zurückzukehren. Während aber links keine Bedingung an die Pfade gestellt wird, besteht rechts die Einschränkung auf Pfade, die in J Schritten zu k und in K 19 1 Zeitdiskrete Markovketten Schritten wieder von dort zurückführen. Also ist die Wahrscheinlichkeit auf der rechten Seite nicht gröÿer als die auf der linken Seite. Summiert man nun in (1.6) über alle n, erhält man links einen endlichen Wert, da Der Wert auf der rechten Seite ist dann auch endlich, d.h. der Zustand Satz 1.9 Beweis (indirekt) Angenommen, C muss auch transient sein. i2C sei eine oene rekurrente Klasse. und ein Zustand Pi (Xm = j ) > 0 i transient ist. ([Nor97], Theorem 1.5.5.) Rekurrente Klassen sind abgeschlossen. Es existiert dann ein Zustand Da k j von j j2 = C, für ein i aus erreichbar ist: m 1: aus nicht erreichbar ist, gilt Pi (fXm = j g \ fXn = i Das ist unmöglich, wenn Also muss der von Pi (Xn = i Folgerung 1.1 Pi (Xn = i g) = 0: i.o ) = 1 ist. i.o ) < 1 sein, d.h. Pi (Xn = i i.o ) = 0 und i ist transient; Widerspruch! i.o Oene Klassen sind transient. Bemerkung 1.8 Abgeschlossene Klassen können transient oder rekurrent sein. 1.3.3 Endliche Kommunikationsklassen Wir betrachten nun endliche Kommunikationsklasse, also solche, die nur endlich viele Elemente enthalten. Satz 1.10 Beweis [Nor97], Theorem 1.5.6.) Endliche abgeschlossene Klassen sind rekurrent. Die Klasse C sei abgeschlossen und endlich. Wegen der Endlichkeit von Dann muss aber 20 Pi (Xn = i C gibt es ein i2C mit Pi (Xn = i ) = 1 sein und C rekurrent. i.o. ) > 0. i.o. 1.3 Kommunikationsklassen Folgerung 1.2 Eine Markovkette mit endlichem Zustandsraum kann nur dann einen tran- sienten Zustand i haben, wenn ein j existiert mit i!j aber j 6! i (d.h. wenn es eine oene Kommunikationsklasse gibt). Beispiel 1.6 3 2 0 0 0 07 6 0 0 1 0 0 077 0 0 0 0 777 P= 0 0 0 0777 0 0 0 0 75 0 1 0 0 0 0 steht für eine Zahl zwischen 0 und 1, die Zeilensummen von P 6 6 6 6 6 6 6 6 6 4 sind 1. A = f0; 1; 2; 3; 4; 5g. [0] = f0; 4g ist oen, also transient. [1] = f1; 2; 5g ist abgeschlossen und endlich, also rekurrent. [3] = f3g ist oen, also transient. 1.3.4 Unendliche Kommunikationsklassen Unendliche Kommunikationsklassen können sowohl rekurrent als auch transient sein (siehe Übungen). Satz 1.11 Eine rekurrente irreduzible Markovkette erreicht mit Sicherheit jeden Zustand, egal von wo aus gestartet wird; genauer: Ist eine Markovkette j2I irreduzibel, so gilt für jeden beliebigen Zustand (Xn )n0 rekurrent und P(Tj < 1) = 1: Beweis Sei Es ist = (i )i2I P(Tj < 1) = P eine beliebige Startverteilung für den Prozess. i2I i Pi (Tj < 1). Um (1.7) zu zeigen, genügt es daher nachzuweisen, dass Wähle i; j (1.7) Pi (Tj < 1) für beliebige i; j 2 I ist. 2 I . Da i von j aus erreichbar ist, ist p(jim) > 0 für ein m 2 N. Wir halten m fest. Pj (Xn = j Da j Da Pj (Xn = j für ein n m + 1) Pj (Xn = j ein rekurrenter Zustand ist, ist Pfade mit der Eigenschaft Xn ) = 1. i.o. ) ist, ist auch Pj (Xn = j für ein n m + 1) = 1. i.o. = j für ein n m +1 durchlaufen zur Zeit m verschiedene Zustände k. 21 1 Zeitdiskrete Markovketten Wir können dies foldendermaÿen ausdrücken: Pj (Xn = j für ein n m + 1) = X k 2I Pj (Xn = j für ein n m + 1 j Xm = k) Pj (Xm = k): Wegen der Markoveigenschaft sind in (1.8) alle Ferner sind in (1.8) alle Pj (Xm = k) = p(kjm) . Zusammen hat man also Da P Für (m ) k2I pjk k=i P k2I Pk (Tj < (1.8) Pj (Xn = j für ein n m +1 j Xm = k) = Pk (Tj < 1). 1)p(jkm) = 1. = 1 ist, muss Pk (Tj < 1) = 1 zumindest für solche k; j 2 I gelten, für die p(jkm) > 0 ist. ist das der Fall. Also ist Pi (Tj < 1) = 1. 1.3.5 Irrfahrten Beispiel 1.7 (1-dimensionale Irrfahrt) ([Nor97], Ex. 1.6.1) Der Für alle i 2 Z sei pi;i+1 = p > 0 und pi;i 1 = q > 0 mit p + q = 1. Es ist klar, dass I Zustandsraum sei Z. eine einzige (abgeschlossene) kommunizierende Klasse darstellt. Die Markovkette ist also irreduzibel. Ist sie rekurrent oder transient? 0. Da er nur nach einer geraden Anzahl Schritte zur 0 = 0 für alle n. Der Prozess starte im Zustand zurückkehren kann, ist n+1) p(2 00 Bei gerader Schrittzahl Das ist auf keit (pg)n : 2n n 2n gibt es n Schritte nach rechts und n Schritte nach links. verschiedene Weisen möglich. Jeder Pfad hat dabei die Wahrscheinlich- n) p(2 00 ! = 2n (pq)n n (1.9) Zur Entscheidung über Rekurrenz oder Transienz ziehen wir die Summierbarkeit der (2n) p00 heran. Dabei hilft die asymptotische Beziehung (siehe [Nor97], p.30) p n! C 2n(n=e)n : Mit deren Hilfe erhalten wir n) p(2 00 = Im Fall p = q = 1=2 ist 4pq = 1 und Im Fall p 6= q 22 ist 4pq < 1 und P (2n)! (pq)2n (4ppq)n : (n!)2 C n=2 P (2n) n p00 (2n) n p00 = 1, d.h. wir haben Rekurrenz. < 1, d.h. wir haben Transienz. (1.10) 1.3 Kommunikationsklassen Beispiel 1.8 (2-dimensionale symmetrische Irrfahrt) Der Zustandsraum sei Z Z. ([Nor97], Example 1.6.2) Der Prozess starte im Nullpunkt. Bei jedem Schritt gehe der Prozess mit Wahrscheinlichkeit 1=4 zu einem der vier benachbarten Gitterpunkte über. Wir betrachten die Projektionen der Irrfahrt auf die beiden Diagonalen der Ebene R R. Die Projektionsmatrizen sind P+ = 1 2 " 1 1 1 1 # P = und 1 2 " 1 1 1 1 # mit den Wirkungen [ 10 ] 1 [1] 2 1 Xn+1 Xn P+ (Xn+1 Xn ) P (Xn+1 Xn ) 1 1 2 1 Wir identizieren die Projektionen von fahrten (Xn+ )n0 und (Xn )n0 auf 1 0 h i 1 1 2 1 1 1 2 1 (Xn )n0 [ 01 ] 1 [1] 2 1 1 1 2 1 0 1 i h 1 1 2 1 1 1 2 1 : folgendermaÿen mit symmetrischen Irr- Z: Xn+1 Xn [ 10 ] Xn++1 Xn+ = 1 Xn+1 Xn = 1 1 0 1 1 [ 01 ] 1 1 0 1 1 : 1 (Xn+ )n0 und (Xn )n0 sind unabhängig (nachprüfen!). + )n0 Der Prozess (Xn )n0 kehrt genau dann zum Nullpunkt zurück, wenn die Prozesse (Xn und (Xn )n0 gleichzeitig zum Nullpunkt zurückkehren. Daher ist die Wahrscheinlichkeit für die Rückkehr nach 2n Schritten Die Prozesse n) p(2 00 Somit ist P (2n) n>0 p00 = 2n n ! !2 2n 1 2 C22n : = 1 (harmonische Reihe!) und der Prozess (Xn )n0 Beispiel 1.9 (3-dimensionale symmetrische Irrfahrt) Die ([Nor97], Example 1.6.3) 3-dimensionale symmetrische Irrfahrt ist transient. Beweis siehe [Nor97], Example 1.6.3. Beispiel 1.10 (4-dimensionale symmetrische Irrfahrt) Die rekurrent ([Nor97], Exercise 1.6.2) 4-dimensionale symmetrische Irrfahrt ist transient. 23 1 Zeitdiskrete Markovketten Beweis Übungsaufgabe. 1.4 Stationäre (invariante) Verteilungen 1.4.1 Existenz und Eindeutigkeit stationärer Verteilungen Denition 1.7 (stationär (invariant)) Sei = (i )i2I ein nichtnegatives P Zustandsraum I , d.h. alle i seien nichtnegativ und es gelte i 2 I i 1 . Wir sagen, ist stationär (invariant), wenn j = ist (wenn also = P X i 2I i pij für alle Maÿ auf dem j2I gilt). Satz 1.12 ([Nor97] Theorem 1.7.2) Der Zustandsraum I sei endlich. Es gebe ein i 2 I ( n) mit pij ! j für alle j 2 I . Dann ist = (j )j 2I eine invariante Wahrscheinlichkeitsverteilung (d.h. die j summieren sich zu 1 und es ist = P ). Beweis Die j (P )j = ( n) limn!1 pij = j . Ferner ist P k2I k pkj P P P 1, denn es ist j 2I j = j 2I limn!1 p(ijn) = limn!1 j 2I p(ijn) = 1. P P = k2I (limn!1 p(ikn) )pkj = limn!1 k2I p(ikn) pkj = limn!1 (P n P )ij = summieren sich zu Bemerkung 1.9 Bei der eindimensionalen Irrfahrt (unendlicher Zustandsraum!) ist im ( n) (n) Transienzfall limn!1 pij = 0. In diesem Fall esistieren also zwar die Grenzwerte limn!1 pij , aber sie sind nicht die Komponenten einer Wahrscheinlichkeitsverteilung. Wir werden gleich sehen: Liegt eine irreduzible rekurrente Markovklette vor, so gibt es zu deren Übergangsmatrix P ein positives stationäres Maÿ auf dem Zustandsraum. Dieses Maÿ lässt sich konstruieren, nämlich als k = (ik )k2I ik = Ek Die Gröÿe Zustand ik gibt die Zeit an, die der in X 0nTk 1 k [Xn = i]: (1.11) startende Prozess im Mittel (Erwartungswert) im i verbringt, bevor er zu k zurückkkehrt. Man kann sie auch in folgender Form schreiben: ik = 24 mit X 0n<1 Pk (Xn = i; Tk > n): (1.12) 1.4 Stationäre (invariante) Verteilungen Satz 1.13 ([Nor97], Theorem 1.7.5) 1. kk = 1, 2. k = (ik )i2I 3. für alle ist P irreduzibel und rekurrent. Dann gilt k = kP ist invariant, d.h. i2I Sei und 0 < ik < 1. Beweis 1. Der Prozess hält sich vor der ersten Rückkehr zum Zustand 0. nämlich zur Startzeit 2. Wir wählen ein k genau einmal in diesem Zustand auf, 2 I und zeigen jk = Pi2I ik pij . j a) Es ist jk = Ek X [Xn = j ] = Ek 0nTk 1 denn anstelle des Startpunkts zur Berechnung von jk k X 0<nTk [Xn = j ] = Ek X [Xn = j; n Tk ]; 0<n<1 0) kann man auch den Endpunkt k (zur Zeit Tk ) (zur Zeit heranziehen. b) Vertauschung von Erwartungswert- und Summationsoperator: jk = X 0<n<1 Pk (Xn = j; n Tk ): c) Formaler Einbau der Prozesspositionen zur Zeit jk X X = 0<n<1 i2I 1: n Pk (Xn 1 = i; Xn = j; n Tk ) = X X 0<n<1 i2I Pk (Xn 1 = i; n Tk )pij : d) Vertauschung der Summationen: jk = X i2I pij X 0<n<1 Pk (Xn 1 = i; n Tk ): e) Transformation der Summationsvariablen: jk f) Es ist 3. Sei i2I = X i2I pij X 0m<1 P 0m<1 Pk (Xm Pk (Xm = i; m Tk 1) = a) Positivität: ik X 0m<1 Pk (Xm = i; Tk > m): P gibt es P k i2I i pij gezeigt . (m ) (n ) n; m 2 N mit pki > 0 und pik > 0. positiv und endlich ist. 0 < kk p(kim) b) Endlichkeit: i2I pij = i; Tk > m) = ik , also haben wir hiermit jk = beliebig. Aufgrund der Irreduzibilität von Wir zeigen, dass X (n ) ik pik P k (m ) j 2I j pji = ik . Pj2I jk p(jkn) = kk = 1. 25 1 Zeitdiskrete Markovketten Satz 1.14 ([Nor97], = P ) mit k = 1. Dann ist Ist P Theorem 1.7.6) Sei irreduzibel und ein invariantes Maÿ (d.h. k. = k. zusätzlich rekurrent, dann ist Beweis P Sei j 2 I beliebig. 1. Wegen der Invarianz von ist j Den Summanden k pkj X = i1 2I i1 pi1 j = X i1 2I i1 6=k i1 pi1 j + k pkj : haben wir für spätere Zwecke abgespalten. 2. Wir wiederholen des Invarianzargument und spalten Summanden, die = j X X i1 2I i2 2I i1 6=k i2 6=k i2 pi2 i1 pi1 j 3. Wir wiederholen des Invarianzargument ab: j = X i1 2I i1 6=k ::: X in 2I in 6=k in pin in 1 n + k pkj + X i1 2I i1 6=k k enthalten, wieder ab: k pki1 pi1 j : mal und spalten jeweils Summanden, die pi1 j + k pkj + : : : + X i1 2I i1 6=k ::: X in 1 2I in 1 6=k k pkin 1 k pkj + : : : + 5. Die verbliebenen Gröÿen stellen im Fall X i1 2I i1 6=k 6. Für j (Für 7. Ist P 6= k ist damit j X in 1 2I in 1 6=k j 0<n<1 X in 1 2I in 1 6=k rekurrent, so ist k 1 = 1 pi1 j : pi1 j = Pk (Xn = j; Tk > n): Pk (Xn = j; Tk > n) = jk : nach Satz 1.13 invariant. invariant ist, ist dann k pkin 6= k folgende Werte dar (beachte k = 1): k pkin X i1 2I i1 6=k ::: = k ist k = 1 = kk .) Da auch 26 ::: j X k invariant. enthalten, pi1 j : 4. Wir lassen die erste Mehrfachsumme weg und erhalten die Ungleichung j k 1.4 Stationäre (invariante) Verteilungen Wegen k Wir zeigen: Sei i2I 0. ist Und wegen k = kk = 1 ist k = 0. = 0. ( n) pik > 0 für ein n N (P ist irreduzibel, P ( n) (n) i pik . Also ist i = 0. j 2I j pjk ein beliebiger Zustand und erreichbar). Es ist 0 = k = 2 also ist k von i aus 1.4.2 Positive Rekurrenz, Nullrekurrenz k ist Pk (Tk < 1) = 1, d.h. der Zustand k wird mit Sicherheit wieder aufgesucht. Es ist aber oen, ob der Erwartungswert der ersten Druchgangszeit Tk endlich Für einen rekurrenten Zustand oder unendlich ist. Bemerkung 1.10 X i 2I ik = X X i2I 0n<1 Es ist Ek T k = P k i 2I i , Pk (Xn = i; n < Tk ) = denn X X 0n<1 i2I Pk (Xn = i; n < Tk ) = X 0n<1 Pk (n < Tk ) = Ek Tk : Denition 1.8 Der Zustand k heiÿt positiv rekurrent, wenn Ek Tk < 1 ist und nullrekurrent, wenn Ek Tk = 1 ist. Wie kann man diese beiden Situationen unterscheiden? Satz 1.15 ([Nor97], Theorem 1.7.7) Ist P irreduzibel, so sind folgende Aussagen äqui- valent: 1. Alle Zustände sind positiv rekurrent. 2. Es gibt einen positiv rekurrenten Zustand. 3. Es gibt eine invariante Wahrscheinlichkeitsverteilung auf dem Zustandsraum. Existiert eine invariante Wahrscheinlichkeitsverteilung 1=k . gemäÿ Aussage 3, so gilt Ek Tk = Beweis ) Aussage 2: Aussage 2 ) Aussage 3: 1. Aussage 1 trivial. 2. Wenn (Satz 1.13). Da k k rekurrent ist, ist positiv rekurrent ist, ist mk = P k ein invariantes Maÿ auf dem Zustandsraum k j 2I j < 1. Die Gröÿen j = jk =mk denieren daher eine invariante Wahrscheinlichkeitsverteilung auf dem Zustandsraum. 27 1 Zeitdiskrete Markovketten 3. Aussage 3 ) Aussage 1: = (i )i2I Sei eine invariante Wahrscheinlichkeitsverteilung auf dem Zustandsraum. Wähle einen beliebigen Zustand = (i )i2I Satz 1.13 ist i = i =k . k . Wegen mit ist ein invariantes Maÿ auf Ek Tk = ist k X i2I ik X i =k i2I P (n ) i2I i pik > 0 für ein n. Betrachte dem Zustandsraum mit k = 1. Nach = = 1=k < 1 (1.13) positiv rekurrent. Wegen der Irreduzibilität von dass k. Es ist k = k P sind damit alle Zustände rekurrent. Satz 1.13 sagt in diesem Fall, ist. In (1.13) gilt also das Gleichheitszeichen, d.h. wir haben Ek Tk = X i2I ik = X i2I i =k = 1=k < 1: Beispiel 1.11 (Symmetrische Irrfahrt auf Z) sche Irrfahrt auf Z ([Nor97] Example 1.7.8) Die symmetri- ist irreduzibel und rekurrent. Ist sie positiv rekurrent oder nullrekurrent? Das Maÿ = (i )i2Z mit i = 1 für alle i ist invariant: 2 h i h ::: 1 1 1 ::: = ::: 1 1 1 .. 6 . 6. 6 .. i6 6 : : : 66 6 6 6 4 .. 3 . 0 1=2 1=2 0 1=2 1=2 0 .. . 7 7 7 7 7 7: 7 7 .. 7 .7 5 .. . = 0 das einzige invariante Maÿ bezüglich P auf Z. Es gibt also keine invariante Wahrscheinlichkeitsverteilung auf Z bezüglich P . Die symmetrische Irrfahrt auf Nach Satz 1.14 ist Z 28 ist nach Satz 1.15 nullrekurrent. 2 Warteschlangen E 2.1 Einige Eigenschaften der Exponentialverteilung () Dichte f (x) = [0 x]e Verteilungsfunktion x : F (x) = [0 x](1 e x ): Momenterzeugende Funktion F~ (s) = E e Momente sX = Z 0 1 e sx e x dx = Z 0 1 e x(s+) dx = x(s+) x=1 e = : s+ s+ x=0 = 1: (s + )2 s=0 2 = 2( 1 )2 : F~ 00 (s) = E X 2 e sX ; F~ 00 (0) = E X 2 = (s + )3 s=0 F~ 0 (s) = E Xe Erwartungswert Varianz sX ; F~ 0 (0) = E X = E X = F~ 0 (0) = 1 : Var X = E X 2 (E X )2 = F~ 00 (0) F~ 0 (0)2 = ( 1 )2 : Gedächtnislosigkeit P(X > t + s j X > t) = P(fX > t + sg ^ fX > tg) = P(X > t + s) ; P(X > t) P(X > t) P(X > t + s) = F c (t + s) = e (t+s) = e P(X > t) F c (t) e t s = F c (s) = P(X > s): 29 2 Warteschlangen 2.2 Der Poissonprozess ((t))t0 2.2.1 Eigenschaften 1. ((t))t0 ist ein Zählprozess. Die Zufallsvariablen (t) 2 N geben an, wieviele punktuelle Ereignisse im Zeitintervall [0; t] stattgefunden haben. Seine Pfade t 7! (t; ! ) sind monoton wachsende Treppenfunktionen. Die Zunahmen (t + h) (t) auf ]t; t + h] heiÿen Inkremente. a) Der Poissonprozess b) c) 2. (P1) Inkremente disjunkter Zeitabschnitte sind unabhängig: (t + h) (t) und (t0 + h0 ) (t0 ) sind unabhängig, falls ]t; t + h]\]t0 ; t0 + h0 ] = ;: 3. (P2) Die Wahrscheinlichkeitsverteilung der (t) ist P((t) = j ) = e j t (t) : j! Die mittlere Zahl (Erwartungswert) von Ankünften im Intervall [0; t] ist E (t) = t = Ankunftsrate mal Intervalllänge: P((0) = 0) = 1. Damit folgt aus (P1): (t + h) (t) und (t) sind unabhängig, denn (t) = (0+ t) (0). Wie sind die Inkremente (t + h) (t) verteilt? 4. Aus (P2) folgt: 5. Zur Klärung vergleichen wir momenterzeugende Funktionen (momenterzeugende Funktionen identizieren Verteilungen): E z (t) = X j 2N zj e t (t)j j! =e t X (tz )j j! j 2N E z (t+h) = e(t+h)(z =e t etz = et(z 1) ; (2.1) 1) : Wegen der Unabhängigkeit der Inkremente ist E z (t+h) = E z (t) z ((t+h) Folglich ist E z (t+h) (t) (t)) = e(t+h)(z = E z (t) E z ((t+h) 1) t(z 1) = eh(z (t)) : 1) : (2.2) (2.3) Vergleicht man (2.1) mit (2.3), erkennt man: in (2.1) hat man eine momenterzeugende Funktion einer poissonverteilten Zufallsvariable mit Erwartungswert 30 t. Somit liegt in 2.2 Der Poissonprozess ((t))t0 (2.3) eine momenterzeugende Funktion einer poissonverteilten Zufallsvariable mit Erwartungswert h vor, kurz: (t + h) (t) P (h) Die Verteilung der Inkremente (2.4) (t + h) (t) hängt nicht von t ab. Man sagt: (P3) Die Inkremente (t + h) (t) sind stationär. 6. Gibt es gleichzeitige Ankünfte? Nein! (P4) Ankünfte geschehen nacheinander (orderliness) : lim 1 P((t + h) h!0 h (t) 2) = 0: Beweis 1 P((t + h) lim h!0 h (t) 2) 1 (1 P((t + h) (t) = 0) P((t + h) (t) = 1)) = hlim !0 h 1 (1 = hlim !0 h = hlim (e !0 e h he h ) h + 2 he h e h ) =0 7. (P5) P((t + h) (t) = 1) h ; genauer: lim 1 P((t + h) h!0 h 1 he (t) = 1) = hlim !0 h h = : ,: Poisson (1.Def.). Für Minimalisten/Puristen: (P1)+(P3)+(P4) ,: Poisson (2.Def.). Es gilt nämlich: (P1)+(P2)+(P3)+(P4)+(P5) ) (P2) und (P3)+(P4) ) (P5). 8. Für Pragmatiker: 9. (P1)+(P2)+(P3)+(P4)+(P5) ((t))t0 ist ein Ankunftsprozess. Die Ankunftsepochen 0 < t1 < t2 < : : : markieren seine Sprungstellen. Wir studieren die Zwischenankunftszeiten (inter-arrival-times) . Wie sind sie verteilt? Zwischenzeiten: 1 = t1 ; 2 = t2 t1 ; : : : : 31 2 Warteschlangen 1 > t , (t) = 0, daher ist P(1 > t) = P((t) = 0) = e t , d.h. 1 E (): Wie ist 2 verteilt? P(2 > t j 1 2 [x; x + h]) = P(2 > t ^ 1 2 [x; x + h]) P(1 2 [x; x + h]) P(( t + x + h) (x + h) = 0 ^ (x + h) (x) = 1) = P((x + h) (x) = 1) = P((t + x + h) (x + h) = 0) P((x + h) (x) = 1) P((x + h) (x) = 1) = P((t + x + h) (x + h) = 0) = e t : Folglich ist lim P(2 > t j 1 2 [x; x + h]) = P(2 > t j 1 = x) = e h#0 Davon liest man ab: t : 2 ist unabhängig von 1 und verteilt wie 1 . Vollständige Induktion liefert: (j )j 2N ist eine Familie unabhängiger, mit Parameter exponentialverteilter Zuvallsvariabler. 10. 3.Denition eines Poissonprozesses: Ein Poissonprozess ist ein Ankunftsprozess mit exponentialverteilten Zwischenankunftszeiten. (t) = n. Wie groÿ ist unter dieser Voraussetzung die Wahrscheinlichkeit für (u) = x, wenn x 2 f0; 1; : : : ; ng und u 2 [0; t] ist? 11. Sei Man hat P((u) = x ^ (t) = n) = P((u) = x ^ (t) (u) = n x) = P((u) = x) P((t) (u) = n x) = e u (ux!) e (t u) (((tn ux)))! x und P((t) = n) = e 32 t (t)n ; n! n x 2.2 Der Poissonprozess ((t))t0 also ist x^(t)=n) P((u) = x j (t) = n) = P((u)= (t)=n = nx u (t t u) = nx ( ut )x (1 ux )n x n x n Das Resultat hängt nicht von lichkeit, bei Einzelerfolg 12. n u t Versuchen x ab. Man kann das Resultat interpretieren als Wahrschein- x-mal Erfolg zu haben, wenn die Wahrscheinlichkeit für einen ist. Die Wahrscheinlichkeit u t ist das Verhältnis der Intervall-Längen. t1 ist die erste Ankunftsepoche. Wie ist sie verteilt, wenn (t) = 1 ist? P(t1 u j (t) = 1) = P((u) = 1 j (t) = 1) = 11 ( ut )1 (1 ut )0 = ut : Interpretation: Unter der Bedingung, dass genau eine Ankunft in Ankunftszeit gleichverteilt auf [0; t]. [0; t] stattndet, ist die 2.2.2 Eine Anwendung Beispiel 2.1 ([Wol89], Example 2-7) Wir betrachten folgende Situation: Fahrgäste kom- men an einem Bahnhof an. Ihre Ankünfte stellen einen Poissonprozess mit Ankunftsrate dar. Am Bahnhof kommen Züge an. Ihre Ankünfte bilden einen Ankunftsprozess mit Zwi- P(Xj t) = F (t) Verteilungsfunktion. Es gelte E Xj = 1=. schenankunftszeiten Xj , wobei ist. F ist eine nicht näher spezizierte Gesucht ist der Anteil der Fahrgäste, deren Wartezeit einen Wert y nicht überschreitet. Mit anderen Worten: Wir wollen wissen, wie sich die verschiedenen Wartezeiten auf die Fahrgäste verteilen. Sei Kj die Anzahl der Fahrgäste, die in der Zeit der Fahrgäste, deren Wartezeit y Xj ankommen. Sei Kj (y) die Anzahl nicht übersteigt. Der bedingte Erwartungswert für Kj unter der Bedingung Xj ist E(Kj j Xj ) = Xj : Erwartungswerte bedingter Erwartungswerte stimmen mit den entsprechenden unbedingten Ertwartungswerten überein: E Kj = E(E(Kj j Xj )) = E Xj = E Xj = : 33 2 Warteschlangen Ist Xj y, so ist Kj (y) = Kj und E(Kj (y) j Xj ) = Xj . Ist Xj > y , so ist Kj (y) Kj und E(Kj (y) j Xj ) = y. Also ist E(Kj (y) j Xj )) = min(Xj ; y) und damit E(Kj (y)) = E min(Xj ; y) = Z y 0 F c (x) dx; denn E min(Xj ; y) = 1 Z 0 P(min(Xj ; y) > x) dx = Z 0 y P(Xj > x) dx = Nun können wir den Anteil der Fahrgäste mit Wartezeit P 1j n Kj (y ) P lim n!1 1j n Kj Z y 0 F c (x) dx: y berechnen: 1P 1j n Kj (y ) n = nlim P 1 !1 n 1j n Kj P limn!1 n1 1j n Kj (y) = P limn!1 n1 1j n Kj = E Kj (y) E Kj Z y = F c (x) dx =: Fe (y): 0 Fe (y) steht für die Gleichgewichtsverteilung (equilibrium distribution) von F. 2.2.3 Faltung von Verteilungen Wenn man die Verteilungen von Zufallsvariablen kennt, kennt man dann auch die Verteilungen ihrer Summe? Antwort: Faltung der Verteilungen. 1. Uns interessiert z.B. die Verteilung von X1 und X2 diskrete Werte annehmen: P(X1 = i) = ai 0 P i2N ai = 1 und P(X2 = i) = fi 0 mit i2N fi = 1. Nehmen wir zunächst an, dass mit 34 P Z2 = X1 + X2 . 2.2 Der Poissonprozess ((t))t0 P(Z2 t) = X = X = X = X = X k t k t k t k t k t P(X2 = k; X1 + X2 t) (2.5) P(X2 = k; X1 t k) (2.6) P(X2 = k) P(X1 t k) (2.7) P(X2 = k)A(t k) (2.8) A(t k)fk (2.9) =: (A F )(t): In (2.7) wurde die stochastische Unabhängigkeit von (2.10) deniert die Faltung von (2.10) X1 und X2 benutzt. A und F . 2. Überlegen Sie, warum folgende Gleichheit gilt: (A F )(t) = (F A)(t): 3. Nehmen wir nun an, dass Die Verteilungsfunktion te(funktion) zu Die Faltung A X1 und X2 Werte in einem Kontinuum annehmen. Genauer: sei dierenzierbar und es gelte A. Analog sei f die Dichte zu F. A0 (t) = a(t); a ist die Dich- A F = F A hat dann folgende Formen: P(Z2 t) = = In diesem Fall hat Z t 0 Z t 0 A(t u)f (u) du (2.11) F (t u)a(u) du: (2.12) A F = F A auch eine Dichte. Sie hat die Formen d dt P(Z2 t) = = Man bezeichnet sie mit af oder Z Z t 0 0 t a(t u)f (u) du f (t u)a(u) du: f a. Bei der Dierentiation z.B. von (2.11) nach t muss man nur den Integranden A(t u)f (u) t dierenzieren; die Grenzen des Integrationsbereichs spielen nicht mit, weil auÿerhalb des Integrationsbereichs der Integrand sowieso 0 ist. nach 35 2 Warteschlangen 2.2.4 n-fache Faltung 1. F 2 (t) := (F F )(t) F n (t) := (F (n 1) F )(t) f n (t) := dtd F n (t): 2. Die Verteilung von Zn = X1 + (X2 + : : : + Xn ) ist P(Zn t) := A F (n 1) : 2.3 Der Satz von Little 1. Bezeichnungen Cj ; j = 1; 2; : : : tj ; j = 0; 1; : : : Tj = tj +1 tj Dj ; j = 1; 2; : : : Sj ; j = 1; 2; : : : Wj = Dj + Sj tj + W j Kunden (in der Reihenfolge ihres Eintreens) Ankunftszeit des Kunden Cj (0 = t0 t1 : : : < 1) Zwischenzeiten Zeit, die Kunde Cj auf Bedienung wartet (in queue ) Bedienzeit für Kunde Cj (in service ) Verweilzeit: Zeit, die Kunde Austrittszeit des Kunden Cj Cj im System verweilt aus dem System Alle Gröÿen sind zufällig. 2. Durchschnittszeiten durchschnittliche Wartezeit (delay ) pro Kunde lim 1 n!1 n X 1j n Dj =: d durchschnittliche Bedienzeit pro Kunde lim 1 n!1 n X 1j n Sj =: 1 ( = Servicerate) durchschnittliche Systemverweilzeit pro Kunde lim 1 n!1 n 3. Kunden-Zählprozesse 36 X 1j n Wj =: w = d + 1 2.3 Der Satz von Little # Kunden in queue : Nq (t) = X 1j 1 [tj t < tj + Dj ] # Kunden in service : X Ns (t) = [tj + Dj t < tj + Wj ] 1j 1 # Kunden im System: N (t) = Nq (t) + Ns (t) = X 1j 1 [tj t < tj + Wj ] 4. Durchschnittswerte der Kunden-Zählprozesse durchschnittliche # Kunden in queue : lim 1 t!1 t Z t 0 Nq (u) du =: Q durchschnittliche # Kunden in service : Z lim 1 t!1 t 0 t Ns (u) du =: Ls durchschnittliche # Kunden im System: lim 1 t!1 t Z t 0 N (u) du =: L = Q + Ls 5. Ankunfts- und Austritts-Zählprozesse, Ankunftsrate # Ankünfte bis zur Zeit t: # Austritte bis zur Zeit: Ankunftsrate: (t) = maxfj j tj tg (t) = (t) N (t) lim 1 (t) =: t!1 t 6. Der Satz von Little Satz 2.1 (Satz von Little) so gilt Existieren die Grenzwerte und w und sind sie endlich, L = w : 37 2 Warteschlangen Abbildung 2.1: Zum Beweis des Satzes von Little (aus [Wol89], p.235); in der dargestellten Situation ist N (t) = 2; N (T ) = 0; (T ) = 4. Existiert der Grenzwert d und ist er endlich, so gilt Q = d : Existiert der Grenzwert 1 und ist er endlich, so gilt Ls = : Beweis Für j Kein echter Beweis, nur eine Ideenskizze anhand der in Abb. 2.1 gezeigten Situation. = 1; 2; 3; 4 ist Wj X 1j (T ) R R = 01 [tj u < tj + Wj ] du = 0T [tj u < tj + Wj ] du, folglich Wj = = Z T X 1j (T ) 0 Z T X 0 1j (T ) [tj u < tj + Wj ] du [tj u < tj + Wj ] du = (2.13) Z T 0 N (u) du : (2.14) Im allgemeinen Fall hat man Z t 0 N (u) du = wobei der Nachweis des Aus (2.15) folgt 38 X 1j (t) o(t)-Terms Wj + o(t) (2.15) die Sache anspruchsvoll macht. Wj 1 R t N (u) du = 1 (t) P 1 1j (t) (t) + t o(t) und mit t ! 1 die Little-Formel. t 0 t 2.4 M/M/1-Warteschlangen 2.4 M/M/1-Warteschlangen 2.4.1 Übergänge 1. Erklärung der Schreibweise M/M/1: a) Erste Stelle: Wie sind die Ankunftszwischenzeiten b) Zweite Stelle: Wie sind die Bedienzeiten Sj Tj verteilt? verteilt? c) Dritte Stelle: Wieviele Bedienstellen (Server, Kanäle) gibt es? d) M steht für exponentialverteilt. 2. Folgender Zusammenhang zwischen Poissonverteilung P () und Exponentialverteilung E () ist bereits bekannt: Ist ein Ankunftsprozess poissonverteilt mit Parameter , so sind die Zwischenankunftszeiten exponentialvereilt mit dem selben Parameter . 3. Ist ein Kunde im Service, dann ist seine Bedienzeit exonentialvereilt mit, sagen wir, Parameter . 4. Wir betrachten den Prozess (N (t))t0 , der die Anzahl der Kunden im System zur Zeit t t sind folgende Übergänge möglich: Ein Sprung an der Stelle t um um den Wert 1 nach oben (wenn zur Zeit t ein Kunde eintrit), oder ein Sprung an der Stelle t um den Wert 1 nach unten (wenn ein Kunde das System zur Zeit t verlässt). Es kann natürlich auch sein, dass zur Zeit t kein Sprung stattndet. beschreibt. Zum Zeitpunkt P(2; t) die Wahrscheinlichkeit, dass zwei oder mehr Übergänge im Zeitintervall [0; t] stattnden. Es gelte limt!0 P(2; t)=t = 0. Mit dem Landausymbol klein o lässt sich diese Eigenschaft auch schreiben als P(2; t)=t = o(t). (Wir haben schon eine ähnliche Eigenschaft 5. Sei beim Poissonprozess kennengelernt (orderliness ). 6. Wie groÿ ist die Übergangsrate des M/M/1-Systems für den Übergang von 0 auf 1? Es ist P(N (t) = 0 j N (0) = 0) = e t und P(N (t) = 0 j N (0) = 0) = 1 P(N (t) > 0 j N (0) = 0) = 1 P(N (t) = 1 j N (0) = 0) P(N (t) 2 j N (0) = 0) = 1 P(N (t) = 1 j N (0) = 0) + o(t); 39 2 Warteschlangen folglich lim P(N (t) > 0 j N (0) = 0)=t = tlim (1 e !0 t!0 t )=t = : 7. Wie groÿ ist die Übergangsrate des M/M/1-Systems für den Übergang von fn 1; n + 1g? n>0 auf E ()-verteilt, die Zeit bis zum nächsten Abwärtssprung E ()-verteilt. Somit ist die Zeit bis zum nächsten Übergang E ( + )- Die Zeit bis zum nächsten Aufwärtssprung ist verteilt: P(kein Übergang in [0; t] j N (0) = n) = e t e t =e (+)t ; folglich P(ein Übergang in [0; t] j N (0) = n) = 1 e (+)t : 8. Wie groÿ die Wahrscheinlichkeit dafür, dass der nächste Übergang eine Ankunft ist (Voraussetzung ist wieder, dass n > 0 Kunden im System sind)? P(nächster Übergang ist eine Ankunft) = =( + ): Beweis limt!0 P(ein Übergang in [0; t] j N (0) = n)=t = + . limt!0 P(eine Ankunft (und ein Übergang) in [0; t] j N (0) = n)=t = . 2.4.2 Gleichgewicht Sei pn = tlim P(N (t) = n) !1 der zeitliche Anteil des Zustands n Kunden sind im System. Das System ist im Gleichgewicht, wenn diese pn existieren und P n pn = 1 ist. 1. Wenn das System im Gleichgewicht ist, bleibt es bei Übergängen mit den Raten auch weiterhin im Gleichgewicht: p0 = p1 ( + )pn = pn 1 + pn+1 40 für n > 0: und 2.4 M/M/1-Warteschlangen Diese Gleichungen sind äquivalent zu den scheinbar simpleren Gleichungen p0 = p1 pn 1 = pn Mit = = hat man Da sich die für n > 0: pn = n p0 : P pn zu 1 summieren, ist p0 0n<1 n = 1. Folglich ist < 1 und p0 = 1 . Bei Gleichgewicht ist also pn = (1 )n : 2. Wenn das System im Gleichgewicht ist, ist a) die durchschnittliche Anzahl der Kunden im System L= X 0n<1 npn = = = X 0n<1 X 0n<1 X 0n<1 n(1 )n nn nn = =(1 ); X 0n<1 X nn+1 (n + 1)n+1 + 0n<1 X 0n<1 n+1 b) die durchschnittliche Anzahl der Kunden in der Warteschlange Q= X (n 1)pn = =(1 ) 1n<1 = =(1 = =(1 = =(1 = 2 =(1 X 1n<1 pn ) (1 p0 ) ) (1 (1 )) ) ) = L; c) die durchschnittliche Anzahl der Kunden im Service Ls = L Q = =(1 ) 2 =(1 ) = ; d) die durchschnittliche Verweilzeit w = L= = (=(1 ))= = 1=( ); 41 2 Warteschlangen e) die durchschnittliche Wartezeit in der Warteschlange d = Q= = L= = w = (=)=( ) = 1=( ) 1=: 3. Das System ist nicht im Gleichgewicht, wenn ist. Es ist dann a) 1, b) limt!1 P(N (t) = n) = 0 für alle n, c) limt!1 P(N (t) > n) = 1 für alle n, d) L = Q = 1 (die Warteschlange wächst unbeschränkt). 2.4.3 Beispiel [Wol89] Ex. 5-4. Ankunftsrate = 80. Serviceraten: Modell 1: 1 = 100, Modell 2: 2 = 200. Mietkosten: Modell 1: 5 e pro Zeiteinheit, Modell 2: 9 e pro Zeiteinheit. Kosten für Kunden-Verweilzeit: 1 e pro Zeiteinheit. Welches Modell ist kostengünstiger? Modell 1: = 0:8, L = 0:8=(1 0:8) = 4, Mietkosten plus Kosten für Verweilzeit pro Zeiteinheit: 5 e+4 e=9 e. Modell 2: = 0:4, L = 0:4=(1 0:4) = 2=3, Mietkosten plus Kosten für Verweilzeit pro Zeiteinheit: 9 e+0.66 e=9.66 e. Modell 1 ist kostengünstiger. 2.5 M/M/1 mit Warteschlangenbeschränkung Bei diesem Modell kann eine Maximalzahl l von Kunden nicht überschritten werden. Sind bereits l Kunden im System und kommt ein weiterer Kunde an, so geht er verloren. Setzen wir wieder 42 pn = tlim P (N (t) = n) !1 für 0 n l: 2.5 M/M/1 mit Warteschlangenbeschränkung Diese Wahrscheinlichkeite müssen sich zu 1 addieren: p0 + p1 + : : : + pn = 1: (2.16) 2.5.1 Gleichgewicht Der Gleichgewichtszustand wird durch l Gleichungen beschrieben: p0 = p1 ; p1 = p2 ; : : : ; pl 1 = pl : Mit = = gilt Wegen (2.16) gilt Im Falle p0 = 0 p0 ; p1 = 1 p0 ; : : : ; pl = l p0 : P 0nl pn = p0 P 0nl n = p0 (1 l+1 )=(1 ) = 1. = ist = 1 und wir haben Gleichverteilung der Zustände: p0 = p1 = : : : = pl = 1=(l + 1): Im Falle (2.17) 6= ist 6= 1 und wir haben p0 = (1 )=(1 l+1 ): Die mittlere Anzahl Kunden im System ist L = p0 Dieser Wert kann explizit berechnet werden: X 0nl nn : L = (1 (l + 1)l + ll+1 )=((1 )(1 k+1 )). Die beste Referenz für Methoden zur expliziten Berechnung von endlichen Summen ist das Kapitel 2 (Sums) in [GKP89]. 2.5.2 Ankunftsrate bedienter Kunden Bei Warteschlangenbegrenzung gibt es neben der Ankunftsrate nämlich die Ankunftsrate bedienter Kunden s : eine weitere Ankunftsrate, s = (1 pl ): Die durschnittliche Wartezeit von Kunden im System ist die durschnittliche Wartezeit bedienter Kunden und errechnet sich aus s : w = L=s : 43 2 Warteschlangen Wenn die Kosten für einen verlorenen Kunden C e betragen, betragen die Durchschnittskosten pro Zeiteinheit pl C: 2.6 Geburts-Todes-Prozesse 2.6.1 Abhängigkeiten der Raten Geburts-Todes-Prozesse beschreiben populationsdynamische Phänomene. Wenn man sich Geburten als Ankünfte in einem System und Tode als verlassen eines Systems vorstellt, hat man die Verbindung zu Warteschlangen. Eine Besonderheit von Geburts-Todes-Prozessen ist allerdings, dass Ankunfts- und Serviceraten nicht konstant sind. Sie können von der Anzahl der vorhandenen Individuen abhängen. 2.6.2 Gleichgewichtsgleichungen Die allgemeinen Gleichgewichtsgleichungen eines Geburts-Todes-Prozesses lauten 0 p0 = 1 p1 ; 1 p1 = 2 p2 ; : : : ; n 1 pn 1 = n pn ; : : : Deniert man bn = so gilt (2.18) i 1 ; 1in i Y pn = bn p0 und man hat die Alternativen entweder ist P P Im Falle 0n<1 pn Im Falle 0n<1 bn = 1. P 0n<1 bn < 1 X 0n<1 ist bn < 1 oder es gilt P p0 = 1= 0n<1 bn und X 0n<1 bn = 1: pn = limt!1 P(N (t) = n) mit = 1 gibt es keine Lösung von (2.18) und pn = limt!1 P(N (t) = n) = 0. 1 2.7 M/M/ -Warteschlangen Bei diesem Warteschlangenmodell sind immer genügend Bedienstellen vorhanden. Es kann sich keine Warteschlange aufbauen, jeder kommt sofort dran. 44 2.7 M/M/1-Warteschlangen Die Gleichgewichtsgleichungen sehen so aus: pn 1 = npn Man hat also pn = Da die Summe der ( )n p n! 0 für für n = 1; 2; : : : : n = 0; 1; : : : : pn den Wert 1 ergeben muss, muss p0 = e sein. Es gilt also pn = e d.h. die Anzahl der Kunden im System ist = n = ( ) ; n! P (=)-verteilt. 45 Literaturverzeichnis [GKP89] Ronald L. Graham, Donald E. Knuth, and Oren Patashnik. Concrete mathematics: a foun- dation for computer science. Addison-Wesley Longman Publishing Co., Inc., Boston, MA, USA, 1989. [Nor97] James R. Norris. Markov Chains. Cambridge University Press, rst edition, 1997. [Str09] Gilbert Strang. Introduction to Linear Algebra. Wellesley-Cambridge Press, fourth edition, 2009. [Wol89] Ronald W. Wol. Stochastic Modeling and the Theory of Queues. Prentice Hall, 1989. 47