Dynamische Geometrie: Grundlagen und Anwendungen.
Werbung

Oliver Labs
Dynamische Geometrie:
Grundlagen und Anwendungen.
— Dieses Skript ist derzeit nicht ohne das Skript
von W. Barth zur Geometrie (2004) lesbar !!! —
Skript zu einer vierstündigen Vorlesung
gehalten an der Universität Erlangen–Nürnberg
im Sommersemester 2008
Version vom 16. September 2008
Inhaltsverzeichnis
0
1
Einführung
0.1 Organisatorisches . . . . . . . . . . . . . . . . . . . . . . . .
0.1.1 Regelmäßig wiederkehrende Aufgabentypen . . . .
0.1.2 Die Klausur . . . . . . . . . . . . . . . . . . . . . . .
0.2 Dynamische Konstruktionen . . . . . . . . . . . . . . . . .
0.2.1 Ein Beispiel: Höhen im Dreieck . . . . . . . . . . . .
0.2.2 Einige Anwendungen Dynamischer Geometrie . .
Sätze entdecken . . . . . . . . . . . . . . . . . . . . .
Sätze intuitiv erfahren . . . . . . . . . . . . . . . . .
0.2.3 Ein erstes Problem . . . . . . . . . . . . . . . . . . .
0.2.4 Ein weiteres Problem: Stetigkeit — Pro und Kontra
Pro Stetigkeit . . . . . . . . . . . . . . . . . . . . . .
Kontra Stetigkeit . . . . . . . . . . . . . . . . . . . .
0.3 Ortskurven . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0.3.1 Ein 4-Stab-Gelenk-Mechanismus . . . . . . . . . . .
0.3.2 Eigenschaften von Ortskurven . . . . . . . . . . . .
0.3.3 Über die Mächtigkeit Dynamischer Geometrie . . .
0.4 Automatisches Sätze–Erkennen und –Beweisen . . . . . . .
0.5 Gruppen und Invarianten . . . . . . . . . . . . . . . . . . .
0.5.1 Lineare Algebra und affine Transformationen . . .
0.5.2 Teil– und Doppel–Verhältnis . . . . . . . . . . . . .
Das Teilverhältnis . . . . . . . . . . . . . . . . . . . .
Das Teilverhältnis im Rn . . . . . . . . . . . . . . . .
Die eindimensionale projektive Gruppe . . . . . . .
Das Doppelverhältnis . . . . . . . . . . . . . . . . .
0.6 Affine Unterräume . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
5
6
6
6
7
7
8
8
9
9
10
10
10
11
11
11
12
13
14
14
15
16
17
18
Euklidische Geometrie
1.1 Das euklidische Skalarprodukt . . . . . . . . . . . .
1.1.1 Einige Begriffe auf Basis des Skalarprodukts
1.1.2 Orthogonale Komplemente . . . . . . . . . .
1.2 Bewegungen in R2 . . . . . . . . . . . . . . . . . . .
1.3 Abstände, Winkel, Flächen . . . . . . . . . . . . . . .
1.3.1 Die Winkelhalbierende . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
21
21
21
23
24
27
27
VII
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
VIII
1.3.2 Orientierung . . . . . . . . . . . . . . . . . . . . . . . .
1.3.3 Dreiecksfläche . . . . . . . . . . . . . . . . . . . . . . . .
Linien und Punkte am Dreieck . . . . . . . . . . . . . . . . . .
1.4.1 Bemerkenswerte Geraden am Dreieck . . . . . . . . . .
1.4.2 Der Schnittpunktssatz . . . . . . . . . . . . . . . . . . .
1.4.3 Formeln für H und M . . . . . . . . . . . . . . . . . . .
1.4.4 Zusammenfassung: Formeln für Schnittpunkte . . . . .
Kreise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Kreis und Gerade . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Tangente und Polare . . . . . . . . . . . . . . . . . . . .
1.5.3 Kreis durch drei Punkte . . . . . . . . . . . . . . . . . .
1.5.4 Sehnenvierecke . . . . . . . . . . . . . . . . . . . . . . .
Kreise am Dreieck . . . . . . . . . . . . . . . . . . . . . . . . . .
Dynamische Geometrie im Kontext euklidischer Geometrie . .
1.7.1 Kontinuität versus Determinismus . . . . . . . . . . . .
1.7.2 Kontinuität in einem Dynamischen Geometrie System
Tracing . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Complex Tracing . . . . . . . . . . . . . . . . . . . . . .
Singularitäten . . . . . . . . . . . . . . . . . . . . . . . .
Lokale und globale Konsistenz . . . . . . . . . . . . . .
Hebbare Singularitäten . . . . . . . . . . . . . . . . . .
Kontinuität beim Auftreten von Singularitäten . . . . .
Kontinuität und Intuition . . . . . . . . . . . . . . . . .
1.7.3 Fazit . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
28
29
29
29
30
30
30
31
31
32
32
33
36
37
39
39
40
42
42
43
44
47
47
Affine Geometrie
2.1 Affine Transformationen . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Affinkombinationen . . . . . . . . . . . . . . . . . . . .
2.1.2 Axiome ebener affiner Geometrie . . . . . . . . . . . . .
2.1.3 Parallelprojektionen in der Ebene . . . . . . . . . . . .
Bemerkenswerte Gerden am Dreieck in aff. Geometrie
2.2 Baryzentrische Koordinaten, Sätze von Pappos und Desargues
2.3 Ellipsen im R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Bilder von Kreisen . . . . . . . . . . . . . . . . . . . . .
Einige Beispiele . . . . . . . . . . . . . . . . . . . . . . .
Einschub: Symmetrische Matrizen . . . . . . . . . . . .
Bilder von Kreisen und Ellipsen . . . . . . . . . . . . .
2.3.2 Erste Eigenschaften von Ellipsen . . . . . . . . . . . . .
Sekanten, Tangenten, Polaren . . . . . . . . . . . . . . .
Mittelpunkt einer Ellipse . . . . . . . . . . . . . . . . .
Konjugierte Durchmesser einer Ellipse . . . . . . . . .
2.4 Kegelschnitte im R2 . . . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 Symmetrische Kegelschnitte . . . . . . . . . . . . . . .
2.4.2 Der allgemeine Fall . . . . . . . . . . . . . . . . . . . . .
2.4.3 Quadriken im Rn . . . . . . . . . . . . . . . . . . . . . .
49
49
49
51
52
53
54
56
57
57
57
59
59
60
60
60
61
62
62
65
1.4
1.5
1.6
1.7
2
INHALTSVERZEICHNIS
— Version vom: 16. September 2008 —
INHALTSVERZEICHNIS
2.5
IX
Affine Geometrie und Dynamische Geometrie Software . . . .
3
Projektive Geometrie
3.1 Die reelle projektive Ebene P2 (R) . . . . . . . . . . . . . . . . .
3.2 Der projektive Raum Pn (K) . . . . . . . . . . . . . . . . . . . .
3.2.1 Definition des projektiven Raumes . . . . . . . . . . . .
3.2.2 Veranschaulichungen projektiver Räume . . . . . . . .
3.2.3 Axiome für projektive Ebenen . . . . . . . . . . . . . .
3.2.4 Projektive Unterräume . . . . . . . . . . . . . . . . . . .
Projektiver Abschluss . . . . . . . . . . . . . . . . . . .
Aufspannen projektiver Unterräume . . . . . . . . . . .
3.2.5 Projektive Abbildungen . . . . . . . . . . . . . . . . . .
3.2.6 Affine Ansicht projektiver Objekte . . . . . . . . . . . .
3.3 Projektivitäten . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Perspektivitäten . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Prinzip der projektiven Ausdehnung . . . . . . . . . .
3.4 Das Doppelverhältnis . . . . . . . . . . . . . . . . . . . . . . . .
3.4.1 Das Doppelverhältnis und Projektivitäten . . . . . . . .
3.4.2 Erweiterung der Definition des Doppelverhältnisses .
3.4.3 Abhängigkeit des Doppelverhältnisses von Reihenfolge
3.4.4 Harmonische Quadrupel . . . . . . . . . . . . . . . . .
3.5 Lineare Geometrie der projektiven Ebene . . . . . . . . . . . .
3.6 Das Dualitätsprinzip in der projektiven Ebene . . . . . . . . .
3.6.1 Das Dualitätsprinzip . . . . . . . . . . . . . . . . . . . .
3.6.2 Erste Anwendungen des Dualitätsprinzips . . . . . . .
3.6.3 Dualität und Projektivitäten . . . . . . . . . . . . . . . .
Punkte der dualen Ebene . . . . . . . . . . . . . . . . .
Verträglichkeit der Dualität mit Projektivitäten . . . . .
Geraden der dualen Ebene . . . . . . . . . . . . . . . .
Das Doppelverhältnis vierer Geraden . . . . . . . . . .
4
Projektive Kegelschnitte
4.1 Klassifikation der projektiven Kegelschnitte . . . . .
4.1.1 Die Klassifikation . . . . . . . . . . . . . . . .
4.1.2 Entartetete Kegelschnitte über C . . . . . . .
4.1.3 Reelle glatte projektive Kegelschnitte . . . .
4.2 Duale Kegelschnitte . . . . . . . . . . . . . . . . . . .
4.2.1 Tangenten an Kegelschnitte . . . . . . . . . .
4.2.2 Polaren zu Kegelschnitten . . . . . . . . . . .
4.2.3 Polaritäten . . . . . . . . . . . . . . . . . . . .
4.2.4 Dualisierung eines Kegelschnitts . . . . . . .
4.3 Cayley–Klein–Geometrien . . . . . . . . . . . . . . .
4.3.1 Winkel–Berechnung mit komplexen Zahlen .
4.3.2 Laguerres Formel zur Winkel–Berechnung .
4.3.3 Abstände und Winkel nach Cayley–Klein . .
— Version vom: 16. September 2008 —
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
68
69
69
69
71
72
74
76
77
78
79
79
81
81
82
83
84
84
84
85
86
89
89
90
91
92
92
93
94
95
95
96
97
97
98
98
99
100
101
102
102
103
104
Abstandsmessung . . . . . . . . . . . . . . . . . . . .
Winkelmessung . . . . . . . . . . . . . . . . . . . . . .
4.3.4 Euklidische Geometrie als Cayley–Klein–Geometrie .
4.3.5 Andere Geometrien . . . . . . . . . . . . . . . . . . .
Parametrisierung glatter Kegelschnitte . . . . . . . . . . . . .
4.4.1 Stereographische Projektion . . . . . . . . . . . . . . .
Projektion des Einheitskreises . . . . . . . . . . . . . .
Projektion eines allgemeinen Kegelschnitts . . . . . .
4.4.2 Die Kanonische Parametrisierung . . . . . . . . . . .
4.4.3 Das Doppelverhältnis auf glatten Kegelschnitten . . .
Projektivitäten auf glatten Kegelschnitten . . . . . . . . . . .
4.5.1 Erste Eigenschaften von Proj. auf Kegelschnitten . . .
4.5.2 Die Achse einer Projektivität auf einem Kegelschnitt
4.5.3 Der Satz von Pascal . . . . . . . . . . . . . . . . . . . .
4.5.4 Der Satz von Poncelet . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
104
104
105
106
106
106
106
107
108
109
112
112
113
113
115
Automatisches Sätze–Erkennen und –Beweisen
5.1 Randomisiertes Beweisen . . . . . . . . . . . . . . . . . . . .
5.1.1 Nullstellen und Nullpolynome . . . . . . . . . . . . .
5.1.2 Automatisches Beweisen von Punkt/Geraden-Sätzen
5.1.3 Bemerkungen . . . . . . . . . . . . . . . . . . . . . . .
5.2 Automatisches Sätze-Erkennen und interaktive Aufgaben .
.
.
.
.
.
117
117
117
118
120
121
4.4
4.5
5
6
Über die Mächtigkeit Dynamischer Geometrie
6.1 Konstruierbarkeit von Punkten mit Zirkel und Lineal . . . . .
6.2 Ortskurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Lösung einiger unlösbarer Aufgaben mittels Ortskurven . . .
6.3.1 Würfelverdopplung mit der Konchoide des Nikomedes
6.3.2 Winkeldreiteilung mit der Konchoide des Nikomedes .
6.3.3 Quadratur des Kreises mit der Quadratrix . . . . . . .
6.4 Ortskurven in verschiedenen Dyn. Geo. Programmen . . . . .
123
123
127
129
129
132
132
134
A Übungsaufgaben
137
B Lösungen zu ausgewählten Aufgaben
149
Literatur
153
Index
155
X
Vorlesungsverzeichnis
1. (21. Apr. ’08)
2. (24. Apr. ’08)
3. (28. Apr. ’08)
4. (29. Apr. ’08)
5. (05. Mai ’08)
6. (06. Mai ’08)
7. (20. Mai ’08)
8. (26. Mai ’08)
9. (27. Mai ’08)
10. (02. Jun. ’08)
11. (03. Jun. ’08)
12. (05. Juni ’08)
13. (09. Juni ’08)
14. (10. Juni ’08)
15. (16. Juni ’08)
16. (17. Juni ’08)
17. (23. Juni ’08)
18. (24. Juni ’08)
19. (30. Juni ’08)
20. (01. Juli ’08)
21. (07. Juli ’08)
22. (08. Juli ’08)
23. (14. Juli ’08)
24. (15. Juli ’08)
Dynam. Geom. Probleme, Gruppen und Invarianten .
5
Teil– und Doppel–Verhältnis . . . . . . . . . . . . . . . 14
Affine Unterräume, eukl. Skalarprodukt . . . . . . . . 18
Spiegelungen, Abstände, Winkel, Volumen . . . . . . 24
Dreiecksfläche, Dreiecks–Schnittpunkts–Satz . . . . . 28
Kreise, Sekanten, Polare, Sehnenvierecke . . . . . . . 30
Kreise am Dreieck: Um–, In–, Ankreise, Feuerbachkreis 33
Dynamische Geometrie im Kontext eukl. Geom. . . . 36
Affine Transf., Axiome aff. Geom., Parallelproj. . . . . 49
Baryz. K., Sätze v. Ceva, Menelaos, Pappos, Desargues 54
Ellipsen, Kegelschnitte im R2 . . . . . . . . . . . . . . 56
Quadriken im Rn , Aff. Geom. und DGS, P2 (R) . . . . 65
Definition des Pn (K), proj. UR, Koordinaten, Beispiele 69
Proj. UR, Abb., Axiome proj. Eb., Aff. Ansichten . . . 78
Perspektivitäten, Proj. Ausdehnung, Doppelverhältnis 81
Harmonische Quadrupel, Lin. Geom. d. proj. Ebene . 85
Satz von Desargues, Dualität . . . . . . . . . . . . . . 88
Duale Geraden, Proj. Kegelschnitte über R, C . . . . . 93
Duale KS, Tangenten, Polaren . . . . . . . . . . . . . . 98
Cayley–Klein–Geometrien . . . . . . . . . . . . . . . . 102
Parametrisierung glatter Kegelschnitte . . . . . . . . . 106
Proj. auf KS, Sätze v. Pascal, Brianchon, Poncelet . . . 111
Autom. Beweisen und Erkennen, Konstruierbarkeit . 117
Ortskurven, Lösung antiker Probleme der Griechen . 127
Abbildungsverzeichnis
0.1
Die Höhen eines Dreiecks schneiden sich in einem Punkt. . . .
XI
7
XII
ABBILDUNGSVERZEICHNIS
0.2
0.3
0.4
0.5
0.6
0.7
Parallelität bereitet manchen Programmen ein Problem.
Schnittpunkte zweier gleich großer Kreise. . . . . . . .
Schnittpunkte zweier gleich großer Kreise. . . . . . . .
Kontinuität ist auch nicht immer intuitiv! . . . . . . . .
Die Ortskurve eines 4-Stab-Gelenk-Mechanismus. . . .
Simplezes. . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
9
9
10
11
20
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
1.14
1.15
1.16
1.17
Beweis des Satzes von Pythagoras. . . . . . . . . .
Drehungen und Spiegelungen um den Ursprung.
SKIZZE fig:DefPolare FEHLT! . . . . . . . . . . . .
SKIZZE fig:WinkelHalbierung FEHLT! . . . . . . .
SKIZZE fig:WinkelViertelung FEHLT! . . . . . . .
SKIZZE fig:Schnittpunkt2KreiseSpringt FEHLT! .
Winkel-Viertelung. . . . . . . . . . . . . . . . . . .
Komplexe Zahlen in Polarkoordinaten. . . . . . .
Ein komplexer Vektor, dargestellt im R2 . . . . . . .
Kreis und Gerade. . . . . . . . . . . . . . . . . . . .
Lokale und globale Konsistenz. . . . . . . . . . . .
Schnittpunkte zweier gleich großer Kreise. . . . .
Eingaben in sind diskret. . . . . . . . . . . . . . . .
Kreis mit der vertikalen Geraden. . . . . . . . . . .
Umwege um die Singularität bei λ = 1. . . . . . .
Vertauschung durch den Monodromie–Effekt. . .
Schnitt der Winkelhalbierenden im Dreieck. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
23
25
32
37
37
38
39
40
41
42
43
43
44
45
45
47
47
2.1
2.2
2.3
Das orthogonale Komplement eines Vektors. . . . . . . . . . .
SKIZZE fig:KreisDurchmesserEll FEHLT! . . . . . . . . . . . .
Nichtentartete affine Kegelschnitte. . . . . . . . . . . . . . . . .
59
61
64
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
SKIZZE fig:zweiStrassen FEHLT! . . .
SKIZZE fig:HinftyStd FEHLT! . . . . .
SKIZZE fig:Rinfty FEHLT! . . . . . . .
SKIZZE fig:P1S1 FEHLT! . . . . . . . .
SKIZZE fig:stereoGraphR1 FEHLT! . .
SKIZZE fig:P1C1 FEHLT! . . . . . . . .
Eine Projektive Ebene mit 7 Punkten. .
SKIZZE fig:DefPersp FEHLT! . . . . .
SKIZZE fig:ViereckeProjAequ FEHLT!
SKIZZE fig:Voll4EckHarm FEHLT! . .
SKIZZE fig:ProjPappos FEHLT! . . . .
SKIZZE fig:GerAusBlatt FEHLT! . . .
SKIZZE fig:ProjDesargues FEHLT! . .
SKIZZE fig:DualDesargues FEHLT! . .
SKIZZE fig:Geradenbueschel FEHLT!
70
71
73
73
74
74
75
82
83
86
87
88
88
91
93
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
— Version vom: 16. September 2008 —
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ABBILDUNGSVERZEICHNIS
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
XIII
4.1
4.2
4.3
4.4
4.5
SKIZZE fig:BeruehrpunktePolare FEHLT!
SKIZZE fig:TangentenDualKS FEHLT! . .
SKIZZE fig:KollKritKS FEHLT! . . . . . .
SKIZZE fig:Pascal FEHLT! . . . . . . . . .
SKIZZE fig:Brianchon FEHLT! . . . . . . .
.
.
.
.
.
99
102
112
114
114
6.1
6.2
6.3
6.4
6.5
6.6
6.7
Die konstruierbaren Zahlen bilden einen Körper. . . . . . . . .
Die konstruierbaren Punkte bilden einen euklidischen Körper.
Konstruktion der Konchoide. . . . . . . . . . . . . . . . . . . .
Weitere mögliche Formen der Konchoide. . . . . . . . . . . . .
Würfelverdopplung mit der Konchoide. . . . . . . . . . . . . .
Die Konstruktion der Quadratrix. . . . . . . . . . . . . . . . . .
Die Quadratur des Kreises mit der Quadratrix. . . . . . . . . .
125
126
130
130
131
133
134
B.1 Zum Gergonne–Punkt. . . . . . . . . . . . . . . . . . . . . . . . 150
B.2 Zum Beweis der Brennpunktseigentschaft der Ellipse. . . . . . 152
— Version vom: 16. September 2008 —
Vorwort
Beim Spielen mit verschiedenen dynamischen Geometrie–Systemen wird
nach einer Weile klar, dass einige der Systeme unterschiedlich reagieren als
andere — obwohl eine Konstruktionsvorschrift ein eindeutiges Ergebnis liefern sollte, scheint es hier mehrere Interpretationsmöglichkeiten zu geben.
Insbesondere für zukünftige Lehrer/innen, die immer wieder auf experimentierfreudige Schüler treffen werden, erscheint es daher wichtig, solche Phänomene zu verstehen, damit man/frau im Unterricht kompetent auf Nachfragen
reagieren kann.
Einige Beispiele: Warum passieren in vielen Programmen falsche, unnatürliche Sprünge, obwohl die Konstruktion nur durch stetiges Ziehen eines Punktes verändert wird, und warum in manchen anderen nicht? Warum können
gewisse Systeme Ortskurven korrekt darstellen und viele andere nicht? Wie
können manche Programme automatisch nicht–triviale Eigenschaften einer
Konstruktion feststellen (wie beispielsweise: die Höhen jedes Dreiecks schneiden sich in einem gemeinsamen Punkt)?
Die Vorlesung (vierstündig, mit Übungen) beantwortet solche Fragen und
erläutert, wie die Probleme entstehen und wie sie lösbar sind. Der Schlüssel
dazu ist im Wesentlichen eine gute Kenntnis der euklidischen und der reellen
und komplexen projektiven Geometrie. Daher wird die Vorstellung dieses
besonders schönen Bereiches der Mathematik einen großen Teil der Vorlesung
einnehmen.
Wir beginnen hierzu mit der aus der Schule bekannten euklidischen Geometrie und beweisen dort zunächst einige relativ einfache, bekannte Sätze über
Punkte, Geraden und Kreise, wie beispielsweise die Tatsache, dass sich die
Höhen eines Dreiecks in einem Punkt schneiden. Anschließend zeigen wir
noch etwas fortgeschrittene Resultate, wie den Satz über den Feuerbachkreis,
bevor wir zur affinen Geometrie übergehen, in der wir insbesondere Ellipsen und Kegelschnitte, die eine Verallgemeinerung von Kreisen darstellen,
genauer verstehen werden.
Die schönste und kompletteste Geometrie ist aber die projektive. Da diese,
wie schon erwähnt, auch für dynamische Geometrie Software sehr wichtig
ist, und weil sie so nahezu vollkommen und perfekt ist, gehen wir auf diese
Geometrie am detailliertesten ein.
Außerdem geben wir, neben der Vorstellung der Geometrie, einige knappe
Darstellungen von Gebieten, auf die man stößt, wenn man die Funktionalitäten der Computer–Programme benutzt. Dies sind zunächst Fragen der
Mächtigkeit von konstruktiver Geometrie, wie beispielsweise: Welche Punkte können mit Zirkel und Lineal konstruiert werden? Das genaue Studium
dieser Frage wird es uns ermöglichen, die drei klassischen Probleme der
Griechen über die Konstruierbarkeit mit Zirkel und Lineal zu klären: Würfelverdopplung, Winkeldreiteilung, Quadratur des Kreises sind tatsächlich
alleine mit den genannten beiden Hilfsmitteln nicht möglich. Erlauben wir
aber auch Schnitte mit Kurven, die durch Bewegen eines auf einer Geraden
gebundenen Punktes entstehen, — sogenannte Ortskurven — so können wir
die Probleme doch lösen. Dies führt uns unmittelbar zur Frage, welche Eigenschaften Ortskurven haben? Beispielsweise fallen sofort einige besondere
Punkte auf, sogenannte singuläre Punkte — welche verschiedenen singulären
Punkte gibt es und wie können wir diese unterscheiden?
Die oben erwähnten Fragen führen auf Themen wie Galoistheorie, Singularitätentheorie, Algebraische Geometrie, von denen wir freilich jeweils nur
einen sehr kleinen Teil anreißen können und den interessierten Hörer auf
weiterführende Literatur verweisen.
Gegen Ende der Veranstaltung gehen wir kurz auf das automatische Sätze–
Beweisen ein. Hierfür gibt es viele Techniken, die alle ihre eigenen Stärken
und Schwächen haben. Leider werden wir nur Zeit haben, auf das randomisierte Beweisen einzugehen. Diese Technik hat den großen Vorteil, dass die
dabei vorgestellten Ideen auch zum automatischen Sätze-Erkennen verwendet werden können und dass man sogar in Echtzeit nachrechnen kann, dass
diese Aussagen mit sehr hoher Wahrscheinlichkeit korrekt sind. Dies wiederum kann man benutzen, um die korrekte Lösung einer Konstruktionsaufgabe
automatisch von einem dynamischen Geometrie Programm überprüfen zu
lassen.
Als Grundlage für die Vorlesung ist ein gutes Verständnis der im Grundstudium erlernten linearen Algebra und teilweise auch der Analysis nötig.
Zunächst verwenden wir diese Kenntnisse, um einige Resultate in der bekannten euklidischen Ebene zu beweisen. Aber auch im weiteren Verlauf der
Vorlesung werden wir viele Ergebnisse letztlich aus Sätzen des Grundstudiums herleiten. Beispielsweise basiert die Klassifikation der Kegelschnitte,
die wir knapp vorstellen, auf der Klassifikation der reellen symmetrischen
Matrizen. Für das Studium der oben erwähnten singulären Punkte werden
wir die Taylorentwicklung um den Punkt verwenden.
Bei der Vorbereitung der Vorlesung habe ich viele Bücher und Vorlesungsskripte anderer Dozenten verwendet, da ich leider kein Buch kenne, das den
von mir behandelten Stoff vorstellt. Daher gebe ich für jedes Kapitel oder
jeden Abschnitt geeignete Literatur an. Der größte Teil der Vorlesung basiert aber auf W. Barths Skript zur Geometrie [Bar04], dessen erstes Kapitel
wiederum dem Buch [KK93] folgt. Neben der angenehmen Tatsache, dass
dieses beispielsweise den projektiven Satz von Pascal und den Satz von Poncelet beweist, ohne die euklidische und affine Geometrie zu vernachlässigen,
hat dies den Vorteil, dass die Hörer der Vorlesung ohne große Mühe eine
Geometrie–Prüfung bei W. Barth in Angriff nehmen können.
Im Wintersemester 2007/08 habe ich eine zweistündige Version dieser Vorlesung bereits in Saarbrücken gehalten, und zwar unter dem Serientitel Elementarmathematik vom höheren Standpunkt. Unter diese Überschrift fügt sich
diese Veranstaltung besonders gut ein, weil nicht nur die obigen Phänomene
dynamischer Geometrie erklärt werden, sondern weil sich während des Semesters herausstellen wird, dass die projektive Geometrie und das Studium
der algebraischen Kurven außerdem das Verständnis der Schulgeometrie (also der euklidischen) von einem sehr einheitlichen Blickwinkel verständlich
macht. Die projektive Geometrie ist nämlich, wie wir sehen werden, weit
mehr als nur die Formalisierung der Perspektive, die man spätestens seit
Albrecht Dürer aus der bildenden Kunst kennt. Beispielsweise kann man
nur durch den Übergang zur projektiven komplexen Ebene in sinnvoller
Weise angeben, wann eine algebraische Kurve parametrisiert werden kann
und die einzige Software, die Ortskurven selbständig vollständig und nicht
nur teilweise darstellen kann, benötigt dazu ebenfalls komplexe projektive
Geometrie, wie wir sehen werden.
Die anschauliche Darstellung der Vorlesung ist neben der jeweils zitierten Literatur auch stark von bekannten Geometern aus dem beginnenden
20. Jahrhundert, insbesondere von D. Hilbert (s. beispielsweise [HCV32])
und F. Klein [Kle25, Kle22] und auch noch aktiven, wie W. Barth [Bar04] und
M. Reid (z.B. [Rei88]), beeinflusst, auch wenn ich zu diesen Mathematikern
nicht immer explizite Verweise angebe. Ich hoffe, dass mir die Präsentation
des Stoffes so gelingt, dass die Hörer der Veranstaltung ähnlich von der Geometrie und ihren Zusammenhängen zur Algebra fasziniert werden, wie es
meiner Meinung nach diese Bücher verdeutlichen.
Für die besonderen Probleme, die dynamische Geometrie hervorruft, haben mich bereits vor einigen Jahren Gespräche mit und Vorträge von U. Kortenkamp — einem der Autoren des dynamischen Geometrie Programmes
C [KRG01]— interessiert, in denen er nämlich immer wieder auf
einige der oben erwähnten Probleme einging. Dies ist einer der Hauptgründe,
aus denen ich diese Veranstaltung überhaupt anbiete. Viele Graphiken dieses
Skriptes habe ich mit C erstellt, andere mit meiner Software
[HLM05].
Ich hoffe, dass die Vorlesung den zukünftigen Lehrern/innen eine große
Hilfe für ihre spätere Lehrtätigkeit sein wird und dass ich außerdem im
Laufe des Semesters ein klein wenig der Faszination, die Geometrie und
deren Verhältnis zur Algebra ausüben kann, vermitteln werde. Vielleicht
schaffen es die Hörer/innen ja sogar, diese Faszination an der Mathematik
und speziell der Geometrie später ihren Schülern näher zu bringen. Denn
dies ist meiner Meinung nach eines der besten Mittel, um die Leistungen im
Fach Mathematik zu verbessern: Spaß und Interesse hervorrufen, damit die
Schüler selbst mehr wissen und lernen möchten.
Der Inhalt der Vorlesung wird — wie oben schon erwähnt — neben der Erläuterung der spezifischen Probleme, die dynamische Geometrie aufwirft, die
Geometrie abdecken, die für eine Geometrie–Prüfung bei Prof. Dr. W. Barth
nötig ist.
Ich werde versuchen, die Veranstaltung so umzusetzen, dass jede/r alles
verstehen kann, wenn er/sie zu Hause die Vorlesung noch einmal durcharbeitet. Außerdem soll jede/r für mindestens zwei Drittel der Übungsaufgaben
einen korrekten Lösungsweg selbständig erkennen können. Ich hoffe, dass
Vorlesung und Übungen diesen Kriterien entsprechen, ohne dabei trivial zu
erscheinen. Dies kann allerdings nur dann eingehalten werden, wenn die
Hörer/innen ein gutes Verständnis der linearen Algebra mitbringen. Denn
diese werden wir immer wieder verwenden, um die geometrische Theorie
aufzubauen. Auf der anderen Seite wird die Vorlesung aber auch dazu beitragen, das im Grundstudium erworbene Wissen zu festigen, da es immer und
immer wieder angewendet wird.
Ich wünsche allen Hörer/innen viel Spaß! Im April 2008,
Oliver Labs
0
Einführung
1. Vorl. — 21. Apr. ’08
An einigen wenigen Beispielen stellen wir hier knapp mögliche Anwendun- Dynam. Geom. Problegen von dynamischen Geometrie Systemen vor. Außerdem sprechen wir me, Gruppen und Inschon einmal kurz manche der Probleme an, die meine Hauptmotivation —varianten
—
sind, diese Vorlesung anzubieten. Des weiteren wird anhand der Beispiele ab hier nicht im Barth–Skript
deutlich werden, warum wir in einem eigenen Kapitel auch höhere Kurven
und das automatische Sätze–Erkennen und –Beweisen ansprechen sollten.
Abschließend geben wir einen kurzen Überblick über die verschiedenen Arten von Geometrie, die wir im Laufe des Semesters kennen lernen werden
und erwähnen an einigen einfachen Beispielen bereits ansatzweise wichtige
später im Detail studierte Konzepte.
0.1 Organisatorisches
Bevor wir zu einer Einführung in die Inhalte dieser Veranstaltung kommen,
noch kurz zu den Aufgaben, Klausuren, etc. Aktualisierte Informationen
werden immer auf der Webseite www.mi.uni-erlangen.de/~labs/ veröffentlicht. Dort werden auch die Übungsblätter, das wöchentlich aktualisierte
Vorlesungsskript, Beispiel–Dateien für Dynamische Geometrie Software usw.
zu finden sein.
0.1.1 Regelmäßig wiederkehrende Aufgabentypen
Fast jede Woche werden mehrere verschiedene Typen von Übungsaufgaben
zu bearbeiten sein:
• Relativ einfache theoretische Aufgaben, die den in der Vorlesung vorgestellten Stoff vertiefen sollen.
6
0 Einführung
• Konstruktionsaufgaben mit dynamischer Geometrie Software (meist DG, GG oder C).
• Etwas schwierigere Aufgaben, für deren Lösung etwas mehr mathematische Kreativität gefordert ist, und die teilweise ein wenig über den engen
Rahmen des Vorlesungsthemas hinausgehen. Manche Aufgaben werden
sogar nicht lösbar sein, ohne weitere Literatur heranzuziehen; diese werde
ich dann aber angeben.
Insbesondere die leichteren Aufgaben sind sehr gut dazu geeignet, direkt
innerhalb der Übungsstunde bearbeitet zu werden, ohne zu Hause lange darüber nachdenken zu müssen. Wir werden aber auch manche der komplexeren
Aufgaben als Präsenzaufgaben bearbeiten — dann aber gemeinsam.
Zur Klausur zugelassen wird, wer wenigstens 50% der möglichen Punkte in
den Hausaufgaben (auf den Aufgabenblättern durch das Kürzel HA kenntlich gemacht) erreicht hat; die Präsenzaufgaben (PA) werden nicht bewertet.
Allerdings wird sich eine sehr gute und aktive Mitarbeit in den Übungen
bei Studierenden, die die Zulassungsgrenze knapp unterschritten haben, ggf.
positiv auswirken.
0.1.2 Die Klausur
Die Klausur am Ende des Semesters wird nur theoretische Aufgaben beinhalten. Die praktische Nutzung von verschiedenen dynamischen Geometrie
Systemen wird in den Hausaufgaben häufig genug geübt werden.
Um einen Schein zu erhalten, muss man die Klausur bestanden haben. Die
Klausurnote ist dann die Scheinnote.
Wenn es zu wenig Hörer gibt, die einen Schein benötigen, wird die Klausur
ggf. durch eine mündliche Prüfung ersetzt.
0.2 Dynamische Konstruktionen
0.2.1 Ein Beispiel: Höhen im Dreieck
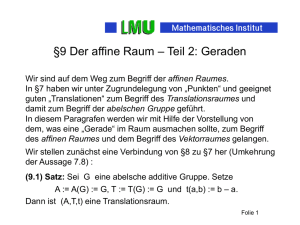
Unser allererstes Beispiel dynamischer Geometrie sei die Eigenschaft, dass
sich die drei Höhen eines Dreiecks stets in einem gemeinsamen Punkt schneiden (Abb. 0.1). Interessanter Weise erscheint dieses fundamentale Faktum
— Version vom: 16. September 2008 —
0.2 Dynamische Konstruktionen
7
nirgends in Euklids1 Elementen2 sondern unseres Wissens erst 1928 bei Durell [Dur20]. Mit einem dynamischen Geometrie Programm zur Hand hätten
Euklid und seine Mitstreiter es bestimmt entdeckt und für aufschreibenswert
befunden.
Abbildung 0.1. → pics/dreieck_hoehen.cdy Die Höhen eines Dreiecks schneiden
sich in einem Punkt: links nur spitze Winkel, in der Mitte ein stumpfer Winkel, rechts
ein rechter Winkel.
Der große Vorteil dynamischer Geometrie Software gegenüber des Konstruierens mit Zirkel und Lineal ist die Tatsache, dass man jederzeit die frei
beweglichen Ausgangsobjekte — hier die drei Eckpunkte des Dreiecks —
verschieben kann und sich dann instantan die davon abhängigen Objekte in
ihrer Lage anpassen.
0.2.2 Einige Anwendungen Dynamischer Geometrie
Sätze entdecken
Die Höhen im Dreieck aus dem vorigen Abschnitt sind ein Paradebeispiel für
eine der wichtigsten Anwendungen dynamischer Geometrie: Durch ein wenig Herumspielen mit den Eckpunkten des Dreiecks — von denen die Höhen
natürlich abhängen (Abb. 0.1) — kommt man sehr schnell auf die Vermutung,
dass sich die drei Höhen immer in einem Punkt schneiden. Allerdings ist dies
natürlich noch längst kein Beweis, dass dies immer so ist, auch wenn wir sehr
viele Positionen ausprobieren. Wie sich eine gefundene richtige Behauptung
trotzdem automatisch beweisen lässt, werden wir gegen Ende der Vorlesung
kurz ansprechen.
1
Euklid lebte in Alexandria (heutiges Ägypten), etwa 325 v.Chr. – 265 v. Chr., siehe
[OR07, SS02]
2
Euklids Elemente sind das erste bekannte umfangreiche Mathematikbuch — und
es war bis ins 19. Jahrhundert eines der meistgelesensten Bücher. Es handelt von Geometrie, ist axiomatisch aufgebaut und enthält (mehr oder weniger) strenge Beweise
für alle Behauptungen, die aufgestellt werden. Besonders erwähnenswert ist auch,
dass diese Beweise meist konstruktiv geführt werden: Euklid gibt sozusagen Algorithmen an, die er allgemein formuliert und die immer zum Ziel führen. Im Internet
finden sich viele Informationen über die Elemente [Joy96, Var07] und natürlich auch
viel Literatur [SS02].
— Version vom: 16. September 2008 —
8
0 Einführung
Sätze intuitiv erfahren
Betrachten wir nochmals das Beispiel der Höhen im Dreieck (Abb. 0.1). Wenn
ein Schüler abstrakt den Satz bereits kennt, dass sich alle Höhen in einem Dreieck schneiden, so werden sich die meißten wohl eine konkrete Instanz eines
Dreiecks im Kopf vorstellen. Dynamische Geometrie Software fordert aber
geradezu dazu heraus, mit der Konstruktion zu spielen und auch andere, vielleicht auf den ersten Blick nicht in den Sinn gekommene Fälle zu entdecken
und dadurch die Intuition wesentlich zu verbessern.
Im Beispiel der Höhen im Dreieck stellen sich vermutlich einige Schüler zunächst nur den Fall vor, in dem alle Höhen innerhalb des Dreiecks verlaufen
(linkes Bild in Abb. 0.1). Dass dies aber nicht immer der Fall sein muss, stellt
man sofort fest, wenn man in einem dynamischen Geometrie Programm experimentiert. Dies fordert die Schüler dazu auf, sich zu fragen, wann dies
passieren kann (was im Beispiel zwar nahezu offensichtlich ist, im Allgemeinen aber nicht so sein wird).
Allerdings liefert das intuitive Erfahren einer dynamischen Konstruktion zunächst leider keinen Beweis für die Richtigkeit einer Aussage, die man dabei
entdeckt hat. Methoden zum automatischen Schließen dieser Lücke werden
wir gegen Ende der Vorlesung kennenlernen.
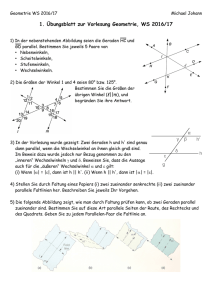
0.2.3 Ein erstes Problem
Für viele dynamische Geometrie Programme ist Parallelität ein großes Problem. Wird beispielsweise in einer Konstruktion der Schnittpunkt zweier
Geraden verwendet und verschiebt man dann die Punkte, so dass die beiden
Geraden parallel liegen, so bricht bei vielen Systemen die ganze Konstruktion
zusammen (Abb. 0.2).
Abbildung 0.2. → pics/parallelitaet_problem.cdy Parallelität bereitet manchen
Programmen ein Problem: Die mittlere Gerade ist definiert als Verbindungsgerade
des Schnittpunkts der beiden anderen Geraden mit dem Punkt F. Die Abbildung
zeigt das korrekte Verhalten: auch wenn der Schnittpunkt im Unendlichen ist, wird
die Gerade noch gezeichnet.
Nicht aber bei solchen Programmen, die auch mit sogenannten unendlich
fernen Punkten zurecht kommen. Dies werden wir im Abschnitt über reelle
projektive Geometrie genauer verstehen.
— Version vom: 16. September 2008 —
0.2 Dynamische Konstruktionen
9
0.2.4 Ein weiteres Problem: Stetigkeit — Pro und Kontra
Pro Stetigkeit
Ein noch schwieriger zu lösendes Problem als das der Parallelität ist es, beim
Verschieben von Konstruktionselementen immer konsistent zu bleiben. Beispielsweise haben die meisten dynamischen Geometrie Programme das Problem, dass die beiden Schnittpunkte zweier gleich großer Kreise spontan den
Platz tauschen (Abb. 0.3).
Abbildung 0.3. Falsches, unstetiges Verhalten der Schnittpunkte zweier gleich großer
Kreise: die blaue und die rote Strecke wechseln ihren Platz beim Verschieben des
Mittelpunktes eines der Kreise.
Zunächst ist unklar, woher dieses Problem überhaupt kommt. Doch die Tatsache, dass es einige wenige Programme gibt, die auch in dieser Situation
konsistent3 — für uns heißt dies hier zunächst einfach mal: stetig — arbeiten (Abb. 0.4), spricht dafür, dass es vermutlich lösbar ist. Dazu werden wir
Geometrie über den komplexen Zahlen betreiben müssen. Unseres Wissens
ist C [KRG01] das derzeit einzige Programm auf dem Markt, das
die Stetigkeit korrekt umsetzt; GG verwendet eine Heuristik, die in
manchen Fällen auch ein richtiges Ergebnis liefert.
Abbildung 0.4. → pics/zwei_Kreise.cdy Korrektes, stetiges Verhalten der Schnittpunkte zweier gleich großer Kreise: die blaue und die rote Strecke bleiben an ihrem
jeweiligen Platz beim Verschieben des Mittelpunktes eines der Kreise.
3
Achtung! Es ist nicht klar, was konsistent genau heißen soll! Insbesondere führt
auch die auf den ersten Blick konsistente Betrachtungsweise von C zu auf
den ersten Blick nicht einleuchtenden Situationen, wie wir später sehen werden.
— Version vom: 16. September 2008 —
10
0 Einführung
Kontra Stetigkeit
Kontinuität hat aber auch ihre Nachteile. Beispielsweise bewirkt in C das Ziehen des einen Eckpunktes B eines Dreiecks durch den anderen A,
dass die sich vorher innerhalb des Dreiecks schneidenden Winkelhalbierenden sich nun außerhalb treffen (s. Abb. 0.5).
Dieses Problem ist, wie wir sehen werden, ein fest an die Stetigkeit Gekoppeltes. In diesem Sinne gibt es also kein perfektes dynamisches Geometrie
Programm. Auch um dies zu verstehen, müssen wir ein wenig Geometrie im
Komplexen betreiben.
Abbildung 0.5. → pics/dreieck_schnitt_winkelhalb.cdy Kontinuität ist auch
nicht immer intuitiv! Im gezeigten Beispiel bewirkt das Ziehen des einen Eckpunktes
B durch den anderen A, dass die sich vorher innerhalb des Dreiecks schneidenden
Winkelhalbierenden sich nun außerhalb treffen.
0.3 Ortskurven
Ähnlich gelagert wie das Problem der Schnittpunkte zweier gleich großer
Kreise ist jenes des korrekten Zeichnens von Ortskurven. Eine Ortskurve ist
hierbei die Menge aller Punkte Q(P), die sich aus einer gegebenen Konstruktion ergeben, wenn der Punkt P sich entlang einer Geraden, eines Kreises
oder allgemeiner einer parametrisierten ebenen Kurve bewegt. Auch hier,
bei dieser ganz wesentlichen Aufgabe eines dynamischen Geometrie Systems, versagen die meisten.
0.3.1 Ein 4-Stab-Gelenk-Mechanismus
Nehmen wir als Beispiel eine sogenannte 4-Stab-Gelenk-Mechanismus, d.h.
ein System von vier Stäben in der Ebene, die jeweils an ihrem Ende mit einem
Gelenk verbunden sind. In den Abbildungen ist die Position eines der Stäbe
fixiert und nur die verbleibenden drei Stäbe werden gezeigt. Wir möchten
nun die Kurve der Mittelpunkte des mittleren der drei Stäbe einzeichnen.
In vielen Programmen sieht dies dann aus wie im linken Bild von Abb. 0.6,
korrekt ist aber das rechte Bild.
— Version vom: 16. September 2008 —
0.4 Automatisches Sätze–Erkennen und –Beweisen
11
Abbildung 0.6. → pics/four_bar_linkage.cdy Die Ortskurve eines 4-Stab-GelenkMechanismus, rechts korrekt, links falsch (nur die halbe Kurve wird gezeichnet).
Woher kommt das Problem? Auch dieses lässt sich mit der Geometrie im
Komplexen verstehen und lösen.
0.3.2 Eigenschaften von Ortskurven
Um ein tieferes Verständnis der auftretenden Ortskurven aufzubauen, werden wir exemplarisch einige etwas näher untersuchen und diese in die Klasse
der ebenen algebraischen Kurven, die als Nullstellenmenge eines Polynoms
in zwei Variablen gegeben sind, einordnen.
Es fallen sofort einige besondere Punkte der Ortskurven auf, wie beispielsweise der Punkt der Ortskurve des 4-Stab-Gelenk-Mechanismus in Abbildung
0.6, in dem sich die Kurve selbst schneidet. Solche Punkte heißen Singularitäten. Wir werden klären, wie man diese erstens lokalisieren und zweitens
ansatzweise klassifizieren kann.
0.3.3 Über die Mächtigkeit Dynamischer Geometrie
Ortskurven hängen unmittelbar mit der Frage zuammen, welche Punkte mit
Hilfe dynamischer Geometrie überhaupt konstruiert werden können. Wir
werden nämlich sehen, dass man mit Zirkel und Lineal nur sehr wenige
Punkte konstruieren kann. Insbesondere kann man nur mit diesen beiden
Hilfsmitteln nicht jeden beliebigen Winkel dritteln, wie schon die Griechen
vermuteten. Erlaubt man zusätzlich aber auch Schnitte mit Ortskurven, so ist
dies möglich!
0.4 Automatisches Sätze–Erkennen und –Beweisen
Einige dynamische Geometrie Systeme können automatisch gewisse geometrische Sachverhalte, die allgemeingültig sind, erkennen und beweisen. Wie
— Version vom: 16. September 2008 —
12
0 Einführung
kann das funktionieren? Es stehen hierfür mehrere verschiedene Methoden
bereit. Drei von ihnen werden wir kurz ansprechen, allerdings können wir
nicht alle nötigen Aussagen auch beweisen, sondern müssen auf Literatur
verweisen.
Als erstes Beispiel hierzu betrachten wir wiederum den Schnittpunkt der Höhen im Dreieck (Abb. 0.1). Definieren wir in C diesen als Schnittpunkt zweier der Höhen, so stellt das Programm automatisch fest, dass dieser
auch auf der anderen Höhe liegt. Dies benutzt das Programm, um automatisch bei Übungsaufgaben kontrollieren zu können, ob sie gelöst wurden.
bis hier nicht im Barth–Skript
——
0.5 Gruppen und Invarianten
Die Beziehung zwischen der aus der Schule und dem täglichen Leben nicht
ganz unbekannten euklidischen, der affinen und der projektiven Geometrie
kann man sehr gut vom Standpunkt Felix Kleins verstehen, den er in seinem
sogenannten Erlanger Programm (1872) einnahm: Die Geometrie ist die Gesamtheit der Eigenschaften, welche sich bei den Transformationen einer gegebenen
Gruppe nicht ändern. Die drei erwähnten Geometrien ordnen sich in diese
Philosophie folgendermaßen ein:
Geometrie
euklidische
affine
projektive
Raum
n
R
Kn
Pn (K)
Gruppe
Bewegungsgruppe
affine Gruppe
projektive Gruppe
Im Laufe der Vorlesung werden wir sehen, wie die einzelnen Räume und
Gruppen, die in dieser Tabelle auftauchen, definiert sind und welche Eigenschaften sie haben. Auf den Unterschied zwischen der Bewegungsgruppe
und der affinen Gruppe gehen wir jetzt schon einmal kurz ein, um die Herangehensweise zu verdeutlichen. Außerdem werden wir dabei in natürlicher
Weise auf ein Problem der euklidischen und affinen Geometrie stoßen, für
das die projektive Geometrie eine Lösung bereit stellt. Dabei lernen wir schon
einmal ein zentrales Konzept, nämlich das Teilverhältnis in der affinen Geometrie und dessen projektives Gegenstück, das Doppelverhältnis, kennen.
Im weiteren Verlauf der Vorlesung werden wir sehen, wie essentiell diese
beiden Invarianten für die jeweilige Geometrie sind.
Der Inhalt dieses gesamten Abschnittes ist in der Einleitung von Barths Geometrie Skript nachzulesen, weshalb hier nur die Überschriften sowie einige
zentrale Sätze und Definitionen angegeben sind.
— Version vom: 16. September 2008 —
0.5 Gruppen und Invarianten
13
0.5.1 Lineare Algebra und affine Transformationen
Alle Aussagen der Linearen Algebra, die ohne ein Skalarprodukt auskommen,
sind invariant unter der allgemeinen linearen Gruppe GL(n, K):
GL(n, K) = {A ∈ Kn×n | det(A) , 0}.
Offenbar ist GL(n, K) tatsächlich eine multiplikative Gruppe mit der Einheitsmatrix als neutralem Element, meist kurz als I geschrieben. Inverse existieren
wegen der Einschränkung an die Determinante.
Lineare Abbildungen haben die Eigenschaft, dass sie den Ursprung 0 invariant lassen. Die meisten uns aus der Schulgeometrie bekannten Abbildungen,
wie z.B. Verschiebungen und andere Kongruenzabbildungen wie Drehungen und Spiegelungen erfüllen dies im Allgemeinen nicht. Damit wir diese
Transformationen der Ebene studieren können, führen wir den folgende allgemeineren Begriff ein:
Definition 0.1. Eine affine Transformation F : Kn → Kn ist eine Abbildung der
Form:
X 7→ T + A · X, T ∈ Kn , A ∈ GL(n, K).
Der Vektor T bewirkt natürlich eine Verschiebung des Ursprungs aus seiner
oben erwähnten Sonderlage in der linearen Algebra. Die affinen Transformationen bilden offenbar eine Gruppe, die sogenannte affine Gruppe, da
GL(n, K) eine Gruppe ist und der Verschiebungsanteil keine Probleme darstellt.
Details im Skript von
Die affine Gruppe des Rn enthält die beiden Untergruppen der Bewegungen
(A = U, U orthogonal) und die konforme Gruppe (A = c · U, U orthogonal,
0 , c ∈ R). Elemente der ersteren heißen auch Kongruenzabbildungen und
der letzteren Ähnlichkeitsabbildungen. Dass dies mit den aus der Schule
bekannten Begriffen übereinstimmt, können wir leicht nachrechnen:
Dazu erinnern wir, dass eine Matrix U ∈ GL(n, K) orthogonal heißt, wenn
U · Ut = I. Die Gruppe der orthogonalen n × n–Matrizen bildet offenbar eine
Gruppe, die orthogonale Gruppe O(n, K); die entsprechenden Abbildungen
heißen orthogonale Abbildungen. Im Spezialfall K = R, schreibt man dafür
auch kurz O(n). Orthogonale Abbildungen erhalten nach Definition das
euklidische Skalarprodukt
hX, Yi = X1 Y1 + · · · + Xn Yn .
Daher bleiben alle Größen, die man auf Skalarprodukte zurückführen kann,
unter Bewegungen erhalten, z.B. der Abstand
d(X, Y) = kX − Yk =
p
hX − Y, X − Yi
— Version vom: 16. September 2008 —
Barth S. 4
Details im Skript von
Barth S. 4
14
0 Einführung
zweier Punkte X, Y ∈ Rn und der Cosinus eines Winkels:
cos(∠(X, A, Y)) =
hX − A, Y − Ai
.
kX − Ak · kY − Ak
Daher ist eine Figur in der Ebene R2 tatsächlich kongruent zu der Figur, die
aus ihr durch eine Bewegung hervorgeht im Sinne der Schulterminologie.
Da eine lineare Abbildung zu einer Matrix c · U mit U orthogonal, 0 , c ∈
R, alle Längen mit dem selben Faktor c streckt, bleiben Längen unter der
konformen Gruppe offenbar nicht erhalten. Winkel ändern sich aber nicht
und auch Verhältnisse von Abständen bleiben gleich, so dass eine Figur,
die durch eine konforme Abbildung aus einer gegebenen Figur hervorgeht,
tatsächlich ähnlich zu ursprünglichen ist im Sinne der Schulterminologie.
0.5.2 Teil– und Doppel–Verhältnis
2. Vorl. — 24. Apr. ’08
Teil– und Doppel–
Verhältnis
Das Teilverhältnis
Eine lineare Abbildung A ∈ GL(n, R) erhält im Allgemeinen noch nicht einmal
Verhältnisse von Abständen und Winkel und Längen werden auch nicht alle
mit dem gleichen Faktor gestreckt. Wenigstens bleiben aber, wie wir gleich
sehen werden, Verhältnisse von Abständen auf einer Geraden erhalten; diese
Eigenschaft ist, wie wir später sehen werden, sehr zentral für die gesamte
affine Geometrie. Zur Präzisierung dieser Aussage definieren wir:
Definition 0.2. Seien U , V ∈ Kn zwei Punkte. Diese spannen eine Gerade UV
auf:
UV := {U + λ(V − U), λ ∈ K} = {(1 − λ)U + λV, λ ∈ K}.
Für einen Punkt X ∈ UV dieser Geraden heißt dann
TV(X; U, V) :=
λ
λ−1
das Teilverhältnis von X in Bezug auf U und V.
Wie schon angedeutet, ist dieses Teilverhältnis eine affine Invariante:
Bemerkung 0.3 (Invarianz des Teilverhältnisses unter affinen Abbildungen). Für jede affine Transformation F : Kn → Kn gilt:
TV(X; U, V) = TV(F(x); F(U), F(V)).
— Version vom: 16. September 2008 —
0.5 Gruppen und Invarianten
15
Beweis. Wir beweisen die Behauptung zuänchst für eine lineare Abbildung
F : X 7→ AX und dann für eine Verschiebung F : X 7→ T + X. Dann folgt die
Invarianz des Teilverhältnisses unter affinen Transformationen durch Hintereinanderausführung einer linearen Abbildung und einer Verschiebung.
Für F(X) = AX ergibt sich für einen Punkt X = (1 − λ)U + λV auf der Geraden
UV
F(X) = A·((1 − λ)U + λV) = (1 − λ)AU + λAV = (1 − λ)F(U) + λF(V)
wegen der Linearität der Abbildung. Offenbar hat sich das Teilverhältnis
nicht geändert.
Ist nun F(X) = T + X eine Translation, so erhalten wir:
F(X) = T + (1 − λ)U + λV = (1 − λ)(T + U) + λ(T + V) = (1 − λ)F(U) + λF(V).
Auch hier hat sich das Teilverhältnis nicht geändert und die Behauptung folgt
durch Hintereinanderausführung.
⊔
⊓
Im Kapitel 2 über affine Geometrie werden wir sehen, dass diese Eigenschaft
so zentral ist, dass wir nahezu alle dort vorgestellten Sätze mit ihrer Hilfe
beweisen werden.
Das Teilverhältnis im Rn
Ist speziell K = R, so können wir von Abständen reden und das Teilverhältnis
mit deren Hilfe interpretieren. Es gilt nämlich:
kX − Uk = k − λU + λVk = |λ|kV − Uk und
kX − Vk = k(1 − λ)U + (λ − 1)Vk = |λ − 1|kV − Uk
und daher:
|TV(X; U, V)| =
λ
kX − Uk
=
.
λ − 1 kX − Vk
Achtung! Diese Gleichung ist betragsmäßig. TV hat aber ein Vorzeichen, je
nachdem, ob X − U und X − V gleich– oder gegengerichtet sind.
Beispiel 0.4. Der Mittelpunkt M = 21 (U + V) zweier Punkte U, V ∈ Rn hat das
Teilverhältnis
TV(M; U, V) =
1
2
− 21
= −1.
— Version vom: 16. September 2008 —
⊔
⊓
16
0 Einführung
Achtung! Aus λ = 1 folgt X = V und TV(X; U, V) = TV(V; U, V) =
nicht definiert ist! Wir setzen daher:
Genauer gilt:
λ
0,
was
TV(V; U, V) := ∞.
Satz 0.5. Das Teilverhältnis definiert eine bijektive Abbildung
Details im Skript von
Barth S. 6
UV\{V} → K\{1}, X 7→ TV(X; U, V).
Beweis. Einfaches Nachrechnen.
⊔
⊓
Der einzige Wert, der also nicht als Teilverhältnis vorkommt, ist 1. Anschaulich wäre dies ein Punkt der Gerade UV, der von U und V den gleichen
Abstand und der außerhalb der Strecke UV liegt. Ein solcher Punkt würde
aber ∞ fern liegen; wie wir mit solchen Punkten sinnvoll umgehen können,
werden wir in der projektiven Geometrie sehen. Hier bemerken wir nur, dass
mit Hinzunahme dieses Punktes folgt:
Korollar/Definition 0.6 (Bijektivität der Abbildung TV). Mit den üblichen
Konventionen über das Rechnen mit ∞ ist die sogenannte gebrochen–rationale
Funktion
λ
K ∪ {∞} → K ∪ {∞}, λ 7→
λ−1
bijektiv.
Die eindimensionale projektive Gruppe
Wir haben eben schon einmal mit ∞ fernen Punkten auf der Geraden K ∪ {∞}
argumentiert. Obwohl wir im Allgemeinen hier die projektive Gruppe noch
nicht einführen können, ist dies wenigstens für diesen eindimensionalen Fall
möglich:
Definition 0.7.
n
o
ax + b
PGL(1, K) := K ∪ {∞} → K ∪ {∞}, x 7→
, a, b, c, d ∈ K, ad − bc , 0
cx + d
heißt eindimensionale projektive Gruppe über K.
Offenbar können wir jede der gebrochen–rationalen Funktionen durch eine
Matrix beschreiben:
!
!
!
ab
x
ax + b
·
=
.
cd 1
cx + d
Dies passt mit der Hintereinanderausführung zusammen: Sind F1 , F2 ∈
PGL(1, K) mit Matrizen A1 , A2 , so liefert A1 · A2 die Matrix der Hintereinanderausführung F1 ◦ F2 , wie man leicht nachrechnen kann.
Proposition 0.8. PGL(1, K) ist eine Gruppe
Details im Skript von
Barth S. 7
Beweis. Einfaches Nachrechnen.
— Version vom: 16. September 2008 —
⊔
⊓
0.6 Affine Unterräume
17
Eindimensionale Affine Transformationen als Elemente in PGL(1, K)
Eindimensionale affine Transformationen
F(x) = ax + b =
a·x + b
0·x + 1
sind spezielle gebrochen–rationale Funktionen zu Matrizen der Form
!
ab
A=
.
01
Diese liefern offensichtlich eine Untergruppe von PGL(1, K). Das Teilverhältnis ist unter projektiven Transformationen aber nicht invariant.
Das Doppelverhältnis
Da das Teilverhältnis, wie wir eben gesehen haben, nicht unter projektiven
Transformationen invariant ist, führen wir das Doppelverhältnis ein:
Proposition/Definition 0.9. Seien x, y, u, v ∈ K. Dann heißt
DV(x, y; u, v) :=
y−u
x−u
:
x−v
y−v
ihr Doppelverhältnis. Dieses ist invariant unter Abbildungen aus der PGL(1, K).
Beweis. Wir schreiben das Doppelverhältnis als Quotient von Determinanten:
!
xu
det
= x − u.
11
Wie weiter oben gesehen, entspricht der Anwendung einer gebrochen–
rationalen Funktion die Multiplikation mit einer invertierbaren Matrix:
!
!
!
ab
x
ax + b
·
=
.
cd 1
cx + d
Die Behauptung folgt also aus dem Determinanten–Multiplikationssatz.
— Version vom: 16. September 2008 —
⊔
⊓
Den Abschnitt im Barth–Skript S. 9 über
die Gruppe der nicht–euklidischen Geometrie haben wir weggelassen!
18
0 Einführung
0.6 Affine Unterräume
3. Vorl. — 28. Apr. ’08
Affine Unterräume, eukl. Skalarprodukt
Details im Skript von
Barth S. 10–11
Geraden in der Ebene R2 sowie Geraden und Ebenen im Raum R3 sind
affine Unterräume. Daher stellen wir in dieser Einführung die wesentlichen
Eigenschaften dieser wichtigen geometrischen Objekte kurz vor. Wir werden
sehen, dass das meiste nur eine geometrische Formulierung jener Tatsachen
ist, die man aus dem Studium linearer Gleichungssysteme bereits kennt.
Definition 0.10. Der Lösungsraum L ⊂ Kn eines homogenen oder inhomogenen
linearen Gleichungssystems heißt affiner Unterraum des Kn . Der zugehörige Untervektorraum L0 heißt zugehöriger paralleler Untervektorraum zu L.
Die Dimension von L ist die Dimension des Vektorraumes L0 . Affine Unterräume der
Dimension 0, 1, 2 bzw. n − 1 heißen Punkte, Geraden, Ebenen bzw. Hyperebenen.
Die Darstellung von Punkten X = (1 − λ)U + λV auf einer Geraden UV in der
Ebene verallgemeinern sich auf affine Unterräume in der folgenden Weise:
Satz 0.11. Für A ⊂ Kn sind äquivalent:
1. A ist affiner Unterraum.
2. ∃ A0 , . . . , Ad ∈ Kn , d ≥ 0, mit
A = {a0 A0 + · · · + ad Ad ∈ Kn | a0 , . . . , ad ∈ K, a0 + · · · + ad = 1}.
3. A , ∅ und mit je zwei Punkten U , V in A gehört auch die Gerade UV zu A.
Details im Skript von
Barth S. 12–13
Beweis. Etwas lineare Algebra.
⊔
⊓
Der Satz zeigt, dass Linearkombinationen von Punkten, deren Summe der
Koeffizienten 1 ergibt, sehr wichtig sind. Wir definieren daher:
Definition 0.12. Eine Affinkombination von Punkten V0 , . . . , Vd ∈ Kn ist eine
Linearkombination
c0 V0 + · · · + cd Vd mit ci ∈ K, c0 + · · · + cd = 1.
Beispiel 0.13.
• Eine Gerade l besteht aus allen Affinkombinationen von 2 verschiedenen
Punkten aus l.
• Zu einem affinen Unterraum A der Dimension d existieren Punkte
V0 , . . . , Vd ∈ A mit der Eigenschaft, dass A aus allen Affinkombinationen
dieser Punkte besteht.
⊔
⊓
— Version vom: 16. September 2008 —
0.6 Affine Unterräume
19
Die Berechnung des Schnittes A1 ∩ A2 zweier affiner Unterräume führt auf
die Lösung eines inhomogenen linearen Gleichungssystems. Dies ist bekannterweise nicht immer lösbar. Wir definieren:
Definition 0.14. Zwei affine Unterräume A1 , A2 heißen parallel, falls A01 = A02 ,
falls also ihre zugehörigen parallelen Untervektorräume identisch sind. Ist A01 , A02 ,
aber A1 ∩ A2 = ∅, so heißen A1 und A2 windschief.
Parallelität ist eine der geometrischen Eigenschaften, die sich unter affinen
Transformationen erhält:
——
ab hier nicht im Barth–Skript
Bemerkung 0.15. Jede affine Transformation bildet parallele Geraden wieder auf
parallele Geraden ab.
Beweis. Sind P, Q ∈ Kn Aufpunkte zweier verschiedener paralleler Geraden
und ist 0 , V ∈ Kn ein Richtungsvektor beider Geraden, so gilt für eine affine
Transformation F(X) = AX + T:
F(P + TV) = A(P + TV) + T = A(P) + T + TAV
und
F(Q + TV) = A(Q + TV) + T = A(Q) + T + TAV.
Die parallelen Geraden mit den Aufpunkten P bzw. Q und dem Richtungsvektor V werden also auf parallele Geraden mit den Aufpunkten A(P) + T
bzw. A(Q) + T und dem Richtungsvektor AV abgebildet.
⊔
⊓
Im Gegensatz dazu bleiben Winkel im Allgemeinen nicht unter affinen Transformationen erhalten:
Beispiel 0.16. Sei P = (1, 1)t und Q = (−1, 1)t. Diese beiden Punkte spannen
gemeinsam mit dem Ursprung O jeweils eine Gerade auf. Der Cosinus des
Winkels, den diese Geraden aufspannen, ist:
cos(∠P, O, Q) =
hP, Qi
= 0;
kPk · kQk
die Geraden stehen also senkrecht aufeinander. Es ist leicht, eine affine Transformation anzugeben, so dass dies nicht mehr so ist, indem wir beispielsweise
Vektoren nur in x–Richtung strecken:
!
20
F(X) =
X.
01
Dann gilt nämlich: F(P) = (2, 1)t und F(Q) = (−2, 1)t und damit:
cos(∠F(P), F(O), F(Q)) =
−3
, 0.
5
Winkel bleiben also im Allgemeinen nicht unter affinen Transformationen
erhalten.
⊔
⊓
— Version vom: 16. September 2008 —
bis hier nicht im Barth–Skript
——
20
0 Einführung
Ist K = R, so können wir Körperelemente ordnen und damit definieren, was
Strecken und Dreiecke sind:
Definition 0.17. Die Strecke V0 V1 zwischen zwei Punkten V0 , V1 ∈ Rn ist
V0 V1 := {V = V0 + c(V − V0 ) | 0 ≤ c ≤ 1}.
Sind allgemeiner V0 , . . . , Vm ∈ Rn , so heißt
V = λ0 V0 + · · · + λm Vm | λ0 + · · · + λm = 1, λi ≥ 0
von Vi aufgespannter Simplex.
Dieser heißt echter m–dimensionaler Simplex, falls die Vektoren V0 , . . . , Vm − V0
linear unabhängig sind. Eine echter 2–dimensionaler Simplex heißt Dreieck.
Abbildung 0.7. Ein Simplex im Dreiraum und einer in der Ebene (also ein Dreieck).
Damit haben wir die wichtigsten Objekte, die wir im Folgenden betrachten
werden, eingeführt und können mit der Beschreibung ihrer Eigenschaften
beginnen.
— Version vom: 16. September 2008 —
1
Euklidische Geometrie
Wie in der Einleitung erläutert ist die euklidische Geometrie das Studium
von Eigenschaften, die unter euklidischen Bewegungen, d.h. Abbildungen
der Form Rn → Rn , X 7→ T + UX, U ∈ Rn×n orthogonale Matrix, T ∈ Rn ,
erhalten bleiben.
Wir haben schon gesehen, dass hierfür das euklidische Skalarprodukt wichtig
ist. Davon ausgehend werden wir Bewegungen in der euklidischen Ebene
besprechen, Abstände und Winkel definieren und schließlich erste Sätze aus
der euklidischen Geometrie beweisen können. Hier seien insbesondere Sätze
über die Eulergerade und den Feuerbachkreis erwähnt.
In diesem Kapitel folgen wir recht genau dem Geometrie–Skript von W. Barth
aus dem Jahr 2004, das von der Webseite des Mathematischen Instituts der
Universität Erlangen–Nürnberg heruntergeladen werden kann. Wir haben
meist nur die Notationen etwas verändert und die Darstellung durch weitere Zeichnungen ergänzt. An einigen Stellen haben wir aber auch ganze
Abschnitte eingefügt.
Nur der letzte Abschnitt über dynamische Geometrie im Kontext euklidischer
Geometrie geht über das zitierte Skript hinaus; diesen Abschnitt führen wir
daher hier im Detail aus.
1.1 Das euklidische Skalarprodukt
1.1.1 Einige Begriffe auf Basis des Skalarprodukts
Definition 1.1. Für zwei Punkte X, Y ∈ Rn heißt
hX, Yi := X1 Y1 + · · · + Xn Yn
22
1 Euklidische Geometrie
das euklidische Skalarprodukt von X und Y. Die Länge oder Norm eines Vektors
X ∈ Rn ist
p
kXk := (X, X).
Aus der Bilinearität des Skalarproduktes folgen sehr leicht:
• Polarisationsformel: 2hX, Yi = kX + Yk2 − kXk2 − kYk2 .
• Cauchy–Schwarz–Ungleichung: |hX, Yi| ≤ kXk · kYk.
• Dreiecks–Ungleichung: kX + Yk ≤ kXk + kYk.
Der Abstand zweier Punkte X, Y ∈ Rn ist definiert durch
d(X, Y) := kX − Yk;
der Cosinus des Winkels, der von zwei Vektoren aufgespannt wird, ist
cos(∠(X, Y)) :=
hX, Yi
≤ 1.
kXk · kYk
Zu beachten ist hier, dass durch den Cosinus der Winkel zwischen den beiden
Vektoren nur bis auf Vorzeichen definiert wird. Wenn wir mit Winkeln umgehen möchten, müssen wir dieses Problem beheben und wir werden sehen,
wie dies zu realisieren ist.
Unabhängig vom Vorzeichen ist die Eigenschaft, des Cosinus, 0 zu sein: Gilt
für zwei Punkte X, Y ∈ Rn hX, Yi = 0, so heißen die beiden von ihnen aufgespannten Ursprungsgeraden senkrecht oder orthogonal zueinander; der
Winkel ∠(X, Y), den sie einschließen, heißt dann rechter Winkel.
Wie man bereits aus der Schule weiß, haben rechte Winkel besondere Eigenschaften. Beispielsweise gilt in rechtwinkligen Dreiecken der Satz des
Pythagoras1 :
hX, Yi = 0 ⇒ kX + Yk2 = hX + Y, X − Yi
= hX, Xi + 2hX, Yi + hY, Yi
= kXk2 + kYk2 .
Details im Skript von
Barth S. 16
——
ab hier nicht im Barth–Skript
Wie Barth in seinem Skript bemerkt, ist dieser Satz in dieser Form eine Tautologie, weil seine Richtigkeit quasi bereits in der Definition der euklidischen
Länge steckt. Wesentlich schöner ist daher der folgende Beweis:
Satz 1.2 (des Pythagoras). Ist ein Dreieck mit den Seitenlängen a, b, c mit einem
rechtem Winkel gegenüber der Seite c gegeben, so gilt (Abb. 1.1, links):
a2 + b2 = c2 .
bis hier nicht im Barth–Skript
——
Beweis. Siehe Abb. 1.1, rechts.
1
⊔
⊓
Übrigens ist es sehr wahrscheinlich, dass dieser Satz nicht auf Pythagoras zurückgeht, auch wenn viele Historiker zumindest vermuten, dass Pythagoras einen Beweis
dafür gekannt habe.
— Version vom: 16. September 2008 —
1.1 Das euklidische Skalarprodukt
23
Abbildung 1.1. Aussage (links) und Beweis (rechts) des Satzes von Pythagoras.
1.1.2 Orthogonale Komplemente
Aus der linearen Algebra wissen wir, dass jeder Untervektorraum V ⊂ Rn
ein orthogonales Komplement
V ⊥ = {w ∈ Rn | hw, vi = 0 ∀ v ∈ V}
besitzt. Nach Wahl eines Fußpunktes v0 ∈ V kann man ein orthogonales
Komplement auch für affine Unterräume definieren:
Definition 1.3. Seien V ⊂ Rn ein affiner Unterraum und V0 ∈ V ein Punkt,
genannt Fußpunkt. Dann heißt
V ⊥ (V0 ) = {W ∈ Rn | hW − V0 , X − V0 i = 0 ∀ X ∈ V}.
orthogonales Komplement des affinen Unterraumes V zum Fußpunkt V0 .
Bemerkung 1.4. Ist V 0 ⊂ Rn der zu V gehörige parallele Unterraum, so ist V =
v0 + V 0 und V ⊥ (v0 ) = v0 + (V 0 )⊥ .
Satz 1.5. Für jeden affinen Unterraum V ⊂ Rn und jeden Punkt W ∈ Rn existiert
genau ein Fußpunkt V0 ∈ V mit W ∈ V ⊥ (V0 ).
Beweis. Nicht schwierig.
⊔
⊓
Korollar/Definition 1.6. Seien V ⊂ Rn ein affiner Unterraum, w ∈ V und v0 ∈ V
der dazu gehörige Fußpunkt. Für alle v0 , v ∈ V gilt dann:
kw − vk2 > kw − v0 k.
Daher heißt für w die Zahl d(w, V) := kw − v0 k sein Abstand vom affinen Unterraum V. Die Abbildung Rn → V, w 7→ v0 heißt Orthogonalprojektion auf den
affinen Unterraum V.
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 16
24
4. Vorl. — 29. Apr. ’08
Spiegelungen, Abstände, Winkel, Volumen
Details im Skript von
Barth S. 17–18
1 Euklidische Geometrie
Beispiel 1.7. Spiegelung an affinem Unterraum Die folgenden Aussagen
sind leicht nachzurechen:
1. Orthogonale Projektion eines Vektors w ∈ Rn auf eine implizit gegebene
Hyperebene H : hn, Xi = c:
v0 = w +
c − hw, ni
· n.
knk2
2. Orthogonale Projektion eines Vektors w auf eine explizit gegebene Gerade
L : {λV1 + (1 − λ)V2 , λ ∈ R}:
v0 =
hw − V2 , V1 − V2 i
hw − V1 , V2 − V1 i
· V2 .
· V1 +
kV1 − V2 k
kV2 − V1 k2
⊔
⊓
Mit w − v0 gehört auch der entgegengesetzte Vektor −(w − v0 ) zu V ⊥ (v0 ) und
der Vektor v0 − (w − v0 ) = 2v0 − w hat den gleichen Abstand kw − v0 k von
V wie w, liegt nur auf dem Projektionsstrahl von w nach v0 auf der anderen
Seite von V. Daher setzen wir:
Definition 1.8 (Spiegelung an Hyperebene). Bezeichnet V0 den zu W ∈ Rn
gehörigen Fußpunkt auf einem affinen Unterraum V ⊂ Rn , so heißt der Vektor
2V0 − W der an V gespiegelte Punkt von W und die lineare Abbildung
Rn → Rn , W 7→ 2V0 − W
heißt Spiegelung am affinen Unterraum V.
Beispiel 1.9. Die Spiegelung an der Hyperebene H : hn, Xi = 0 ⊂ Rn ist die
Abbildung:
hW, ni
W 7→ W − 2
· n.
knk2
⊔
⊓
1.2 Bewegungen in R2
——
ab hier nicht im Barth–Skript
Da wir uns hauptsächlich für die Geometrie der euklidischen Ebene interessieren, gehen wir kurz auf Bewegungen in R2 ein. Diese sind recht einfach
zu verstehen, wie wir sehen werden.
Nach Definition ist eine Bewegung f : R2 → R2 eine Abbildung der Form:
X 7→ T + UX,
T ∈ R2 , U orthogonal .
— Version vom: 16. September 2008 —
1.2 Bewegungen in R2
25
Neben dem Verschiebungsanteil einer solchen Abbildung, der keine Schwierigkeiten bereitet, müssen wir also orthogonale 2×2–Matrizen verstehen. Wir
werden sehen, dass diese eine sehr einfache Geometrie besitzen. Zunächst
einmal gilt:
Proposition 1.10. Es gilt:
2×2
U∈R
!
!
c −s
c s
orthogonal ⇐⇒ U =
oder U =
mit c2 + s2 = 1.
s c
s −c
Beweis. Übungsaufgabe.
⊔
⊓
Da für solche Matrizen U folgt, dass |c| ≤ 1, gibt es ein ϕ ∈ R mit c = cos(ϕ)
und dann, mit dem Satz des Pythagoras, s = sin(ϕ). Daher schreiben wir für
ϕ ∈ R:
!
!
cos(ϕ) − sin(ϕ)
cos(ϕ) sin(ϕ)
D(ϕ) :=
, S(ϕ) :=
.
sin(ϕ) cos(ϕ)
sin(ϕ) − cos(ϕ)
Aus der Proposition folgt sofort:
Korollar 1.11.
• U ∈ O(2), det(U) = 1 ⇐⇒ U = D(ϕ) für ein ϕ ∈ R.
• U ∈ O(2), det(U) = −1 ⇐⇒ U = S(ϕ) für ein ϕ ∈ R.
Um zu verstehen, wie diese beiden Typen von orthogonalen Abbildungen in
der Ebene auf Punkte wirken, betrachten wir zunächst Punkte
!
cos(ϕ)
e(ϕ) :=
sin(ϕ)
auf dem Einheitskreis zum Winkel ϕ ∈ R. Mit Hilfe der Additionstheoreme
Abbildung 1.2. Drehungen und Spiegelungen um den Ursprung im R2 .
— Version vom: 16. September 2008 —
26
1 Euklidische Geometrie
für Sinus und Cosinus ergibt sich einfach:
D(ϕ)e(ψ) = e(ϕ + ψ), S(ϕ)e(ψ) = e(ϕ − ψ).
Damit folgt:
Bemerkung 1.12. Sei ϕ ∈ R. Es gilt:
• R2 → R2 , x 7→ D(ϕ)x beschreibt eine Drehung um den Winkel ϕ um den
Ursprung O ∈ R2 .
ϕ
• R2 → R2 , x 7→ S(ϕ)x beschreibt eine Spiegelung an der Geraden R e( 2 ),
ϕ
ϕ
also einer Ursprungsgeraden mit Winkel 2 , also mit Steigung tan 2 , denn
S(ϕ)e(ψ) = e(ϕ − ψ) = e( 21 ϕ + ( 21 ϕ − ψ)).
• Die Spiegelungen S(ϕ) heißen auch manchmal Drehspiegelungen, weil gilt:
!
1 0
S(ϕ) = D(ϕ) ·
,
0 −1
also eine Hintereinanderausführung einer Spiegelung an der x–Achse und einer
Drehung und den Ursprung um den Winkel ϕ.
• Die Spiegelachse einer Spiegelung S(ϕ) kann man natürlich auch leicht durch
Ermittlung der Eigenvektoren der Matrix ausrechnen. Sofort ergibt sich nämlich
für das charakteristische Polynom: χ(t) = (cos(ϕ) − t)(− cos(ϕ) − t) − sin2 (ϕ) =
− cos2 (ϕ) + t2 − sin2 (ϕ) = t2 − 1. Die Eigenwerte sind also ±1 und ist V nun der
Eigenvektor zum Eigenwert 1, so wird jeder Punkt t · V der Ursprungsgeraden,
die durch V aufgespannt wird, fest gelassen.
Die Untergruppe SO(2) := {U ∈ O(2) | det U = 1} der Drehungen heißt
spezielle orthogonale Gruppe im R2 .
Ähnlich zur obigen Bemerkung ergeben sich mit den Additionstheoremen
für Sinus und Cosinus folgende Eigenschaften:
Bemerkung 1.13. Seien ϕ, ψ, α ∈ R. Es gilt:
• S(ϕ)S(ψ)e(α) = S(ϕ)e(ψ−α) = e(ϕ−ψ+α), d.h. die Hintereinanderausführung
zweier Spiegelungen S(ψ) und S(ϕ) liefert eine Drehung um den Winkel ϕ − ψ
um den Ursprung O ∈ R2 : S(ϕ) ◦ S(ψ) = D(ϕ − ψ).
• S(ϕ)S(ψ) = S(ψ)S(ϕ) ⇐⇒ D(ϕ − ψ) = D(ψ − ϕ) ⇐⇒ |ϕ − ψ| ∈ {0◦ , 180◦ }.
Da S(α) eine Spiegelung an der Geraden R e( α2 ) beschreibt, heißt dies, dass
zwei Spiegelungen an Ursprungsgeraden genau dann kommutieren, wenn diese
Geraden entweder übereinstimmen oder senkrecht aufeinander stehen. Dies löst
Aufgabe 7 über Spiegelungen.
bis hier nicht im Barth–Skript
——
— Version vom: 16. September 2008 —
1.3 Abstände, Winkel, Flächen
27
1.3 Abstände, Winkel, Flächen
In der euklidischen Ebene R2 können wir einige Konstruktionen eindeutig
durchführen, wie beispielsweise:
Konstruktion von
Verbindungsgerade
Schnittpunkt
Lot
Mittelpunkt
zu gegebenen Objekten
zwei verschiedenen Punkten
zwei verschiedenen, nicht parallelen Geraden
einem Punkt und einer Gerade
zwei verschiedenen Punkten
Die Beziehungen der konstruierten Objekte zu den gegebenen ändert sich
dabei nicht bei Anwendung einer Bewegung. Diese Konstruktionen gehören
daher nach Kleins Prinzip zur euklidischen Geometrie.
Gerne würden wir aber auch die Winkelhalbierende so definieren, dass sie in
das Konzept passt, obwohl der Winkel zwischen zwei Geraden ja zunächst
über die Cosinus–Funktion definiert ist.
1.3.1 Die Winkelhalbierende
Um der Problematik der Winkeldefinition mit dem Cosinus aus dem Weg zu
gehen, definieren wir die Winkelhalbierende wie folgt:
Definition 1.14. Seien l, m ⊂ R2 zwei Geraden mit Schnittpunkt S := l ∩ m. Seien
ferner A ∈ l, B ∈ m zwei Vektoren gleicher Länge, so dass die Punkte S, S + A und
S + B die beiden Geraden aufspannen. Die Verbindungsgerade TM von T mit dem
Mittelpunkt M := T + 12 (A + B) von T + A und T + B heißt Winkelhalbierende
von l und m.
Die so definierte Winkelhalbierende existiert offenbar nur, wenn M , T, also A , −B
bzw. l = m. In dem Fall definieren wir die Gerade l = m selbst als Winkelhalbierende.
Bemerkung 1.15. Der Vektor −B in der Definition spannt ebenfalls die Gerade m
auf. liefert aber M = T + 12 (A − B) und daher eine andere Winkelhalbierende. Die
beiden Winkelhalbierenden stehen senkrecht aufeinander wegen kAk = kBk, denn:
D1
E 1
1
(A + B), (A − B) = kAk2 − hA, Bi + hB, Ai − kBk2 = 0.
2
2
4
Satz 1.16. Die beiden Winkelhalbierenden zweier Geraden l und m bilden den geometrischen Ort2 aller Punkte, die von l und m den gleichen Abstand haben.
Beweis. Da die Aussage unter Bewegungen invariant ist, können wir o.B.d.A.
T = 0 wählen und dann die Behauptung nachrechnen.
⊔ Details im Skript von
⊓
2
Der geometrische Ort ist eine Menge aller Punkte, die gewisse vorgegebene
Eigenschaften erfüllen.
— Version vom: 16. September 2008 —
Barth S. 20–21
28
1 Euklidische Geometrie
1.3.2 Orientierung
Details im Skript von
Barth S. 21–22
...
Problem:
To do: Orientierung
erklären!
Definition 1.17. orientierte Länge, orientierter Abstand
Details im Skript von
Barth S. 22–23
Details im Skript von
Barth S. 23–24
Beispiel 1.19. Formel für Fläche eines Parallelogramms.
Details im Skript von
Barth S. 24–25
Definition 1.18. Ein Parallelotop im Rn ist die von n Punkten im Rn aufgespannte
Menge
P(A1 , . . . , An ) := {X = λ1 X1 + · · · + λn Xn , 0 ≤ λν ≤ 1}.
⊔
⊓
Definition 1.20. orientiertes Volumen
Definition 1.21. orientierter Winkel
Da man orientierte Winkel addieren kann, können wir folgenden aus der
Schule bekannten Satz beweisen:
5. Vorl. — 05. Mai ’08
Dreiecksfläche,
Dreiecks–
Schnittpunkts–Satz
Details im Skript von
Barth S. 25
Satz 1.22 (Winkelsumme im Dreieck). Die drei Winkel in einem Dreieck addieren sich zu π bzw. 180◦ .
Beweis.
⊔
⊓
1.3.3 Dreiecksfläche
Details im Skript von
Barth S. 25–27
Ein Parallelogramm setzt sich aus zwei kongruenten Dreiecken zusammen.
...
Definition 1.23. Affinkombination
...
Lemma 1.24 (Cosinussatz). . . .
Satz 1.25 (Heronsche Formel). Das Quadrat der Dreiecksfläche ist
Details im Skript von
Barth S. 27–28
(F∆ )2 = s(s − a)(s − b)(s − c).
Beweis.
⊔
⊓
— Version vom: 16. September 2008 —
1.4 Linien und Punkte am Dreieck
29
1.4 Linien und Punkte am Dreieck
Aus der Schule ist uns bekannt, dass sich an einem die drei Winkelhalbierenden, die drei Seitenhalbierende, die drei Mittelsenkrechten und die drei
Höhen jeweils in einem gemeinsamen Punkt treffen. Wir beweisen dies hier
und geben außerdem explizite Formeln für die Punkte an. Nebenbei liefern
uns diese Rechnungen die Existenz einer weiteren interessanten Geraden am
Dreieck, der sogenannten Eulergeraden.
1.4.1 Bemerkenswerte Geraden am Dreieck
Details im Skript von
Barth S. 29
Definition 1.26. Seitenhalbierende
Definition 1.27. Mittelsenkrechte
Winkelhalbierende. . .
Definition 1.28. Nebenwinkel, Halbierende der Nebenwinkel NHA
Definition 1.29. Höhe
1.4.2 Der Schnittpunktssatz
Wie man bereits in der Schule lernt, schneiden sich die bemerkenswerten
Geraden am Dreiecks jeweils in einem Punkt. Wir werden dies jetzt auch beweisen; und zwar auf zwei verschiedene Arten, nämlich einmal synthetisch,
d.h. ohne Rechnung, und einmal analytisch bzw. algebraisch, d.h. durch
Rechnung.
Satz 1.30 (Schnittpunktssatz). An einem Dreieck schneiden sich die Mittelsenkrechten der Dreiecksseiten, die Winkelhalbierenden der Dreieckswinkel, die Höhen
und die Seitenhalbierenden jeweils in einem Punkt, notiert M, W, H, S.
Beweis. Der synthetische Beweis ist sehr schön und geometrisch, der analytische liefert aber nebenbei Formeln für W und S:
Details im Skript von
Barth S. 30–34
1
W=
a·A + b·B + c·C
a+b+c
und
S=
1
A+B+C .
3
— Version vom: 16. September 2008 —
⊔
⊓
30
1 Euklidische Geometrie
1.4.3 Formeln für H und M
Im vorigen Abschnitt haben wir bereits Formeln für S und W hergeleitet. Mit
deren Hilfe geben wir nun auch Formeln für die anderen beiden Schnittpunkte am Dreieck, nämlich für den Höhenschnittpunkt H und den Mittelsenkrechtenschnittpunkt M an. Diese Ergebnisse gehen auf Euler zurück:
Satz/Definition 1.31 (Euler). Für die Schnittpunkte von Seitenhalbierenden, Höhen und Mittelsenkrechten gilt die Eulergleichung:
S=
1
2
H + M.
3
3
Korollar/Definition 1.32.
1. Es gibt eine Formel für M, nämlich M = 23 S − 12 H.
Details im Skript von
Barth S. 33–34
2. S, H, M liegen auf einer Geraden, der Eulergeraden.
Beweis (Satz 1.31). Nachrechnen mit Hilfe der bereits hergeleiteten Formeln.
⊔
⊓
1.4.4 Zusammenfassung: Formeln für Schnittpunkte
In diesem Abschnitt haben wir für alle Schnittpunkte bemerkenswerter Geraden an einem Dreieck ABC mit Seitenlängen a, b, c und Winkeln α, β, γ
Formeln hergeleitet; hier noch einmal alle auf einen Blick:
6. Vorl. — 06. Mai ’08
Kreise, Sekanten, Polare, Sehnenvierecke
Seitenhalbierende:
S = 13 (A + B + C)
Winkelhalbierende:
W=
Höhen:
H =
Mittelsenkrechten:
M=
a·A+b·B+c·C
a+b+c
tan α·A+tan β·B+tan γ·C
tan α+tan β+tan γ
(tan β+tan γ)·A+(tan α+tan γ)·B+(tan α+tan β)·C
2·(tan α+tan β+tan γ)
1.5 Kreise
. . . wie Barth 1.4
Definition 1.33. Ein Kreis vom Radius r > 0 in der Ebene R2 mit Mittelpunkt M
ist der geometrische Ort aller Punkte X, die von M den Abstand r haben:
kX − Mk = r.
Da sich die reellen Lösungen dieser Gleichung nicht ändern, können wir statt dessen
auch die Kreisgleichung
kX − Mk2 = r2 bzw. (X1 − M1 )2 + (X2 − M2 )2 = r2 ,
die ohne die Wurzel bei der Norm auskommt und daher häufig angenehmer zum
praktischen Arbeiten ist.
— Version vom: 16. September 2008 —
1.5 Kreise
31
1.5.1 Kreis und Gerade
Am Einfachsten kann man die Schnittpunkte eines Kreises, der über seine
Kreisgleichung kX − Mk2 = r2 gegeben ist, mit einer Geraden berechnen,
wenn diese in der parametrisierten Form
l : X = A + sV
gegeben ist. Einsetzen liefert dann nämlich. . .
Details im Skript von
Barth S. 35–36
Tangente
Satz von Vieta
...
Satz 1.34 (Sekantensatz). Der Punkt A ∈ R2 sei fest gewählt. Für jede Gerade
l durch A, die einen gegebenen Kreis k mit Mittelpunkt M und Radius r in zwei
Punkten schneidet, ist das Produkt der Entfernungen von A zu diesen beiden Punkten
konstant gleich
kA − Mk2 − r2 .
Ist l Tangente, so wird dieses Produkt das Quadrat t2 des Tangenteabschnitts t.
Kor: beide Tangentenabschnitte gleich
lang!
1.5.2 Tangente und Polare
Jetzt: A auf Kreis. . .
Also Tangentengleichung:
bzw.
hA − M, X − Ai = 0
(1.1)
hA − M, X − Mi = r2 .
(1.2)
...
Definition 1.35. Die Polare eines Punktes P ∈ R2 in Bezug auf den Kreis k mit
Mittelpunkt M und Radius r > 0 ist die Gerade mit Gleichung (Abb. 1.3):
hX − M, P − Mi = r2 .
Problem:
Skizze fehlt:
fig:DefPolare!
— Version vom: 16. September 2008 —
32
1 Euklidische Geometrie
fig:DefPolare
Abbildung 1.3. SKIZZE fig:DefPolare FEHLT!
1.5.3 Kreis durch drei Punkte
Durch A, B, C ∈ R2 , nicht alle auf einer Geraden, kann man genau einen Kreis
zeichnen: sein Mittelpunkt ist der Schnittpunkt der Mittelsenkrechten auf
den drei Verbindungsstrecken der Punkte.
Details im Skript von
Barth S. 37
. . . Formel für den Kreis durch drei Punkte A, B, C. . .
1
1
1
1
kXk2 kAk2 kBk2 kCk2
= 0.
k(A, B, C) := det
X1 A1 B1 C1
X2 A2 B2 C2
Satz 1.36. Die Menge der Punkte A, B, C ∈ R2 , die die Gleichung k(A, B, C) = 0
erfüllen, ist ein Kreis durch die drei Punkte A, B, C.
Dies ist auch der einzige Kreis durch drei Punkte A, B, C, denn:
Details im Skript von
Barth S. 38
Satz 1.37. Zwei verschiedene Kreise schneiden sich höchstens in zwei verschiedenen
Punkten.
Beweis.
⊔
⊓
1.5.4 Sehnenvierecke
Im Allgemeinen geht durch vier Punkte A, B, C, D kein Kreis, wie wir eben
gesehen haben. Vier Punkte auf einem Kreis sind daher sehr speziell:
Definition 1.38. Ein Viereck heißt Sehnenviereck, wenn seine vier Ecken auf einem
Kreis liegen.
Sehnenvierecke können wir folgendermaßen charakterisieren:
— Version vom: 16. September 2008 —
1.6 Kreise am Dreieck
33
Satz 1.39 (Innenwinkel von Sehnenvierecken). Ein Viereck ABCD ist genau
dann ein Sehnenviereck, wenn sich die Paare gegenüberliegender Innenwinkel zu
180◦ ergänzen:
α + γ = β + δ = π.
Beweis (⇒).
⊔
⊓
Details im Skript von
Barth S. 38–39
Satz 1.40 (Peripheriewinkel). Es seien A , B zwei verschiedene Punkte auf einem
Kreis k. Die Sehne AB teilt den Kreis in zwei Zusammenhangskomponenten.
• Für alle Punkte C in der selben Zusammenhangskomponente ist der Winkel hACB
gleich. Die Winkel zu Punkten C udn C′ in beiden Zusammenhangskomponenten
ergänzen sich zu 180◦ .
• Umgekehrt liegen alle Punkte C auf der selben Seite der Geraden AB mit gleichem
Winkel hACB auf dem selben Kreisbogen über der Sehne AB.
Beweis.
⊔
⊓
Details im Skript von
Barth S. 39–40
Beweis (⇐ von Satz 1.39 über Sehnenvierecke). Sei D′ ein Punkt auf dem eindeutigen Kreis k durch A, B, C, der auf der gleichen Seite der Sehne AC liegt wie
D′ . Aus dem ersten Teil des Satzes über die Peripheriewinkel folgt dann:
β + δ′ = 180◦
und mit dem zweiten Teil können wir schließen, dass D und D′ auf dem
selben Kreisbogen liegen. D.h., D liegt auch auf dem Kreis k durch A, B, C.
⊔
⊓
1.6 Kreise am Dreieck
. . . wie Barth 1.5
Definition 1.41. Der Umkreis eines Dreiecks ABC ist der eindeutige Kreis durch
seine drei Ecken A, B, C.
Der Umkreismittelpunkt hat von allen drei Ecken den selben Abstand. Deswegen ist er der Schnittpunkt M der Mittelsenkrechten. Der Umkreisradius
ist auf mehrere Weisen auszurechnen:
Satz 1.42 (Formel für den Umkreisradius). Ist α ein Winkel des Dreiecks ABC
und a die Länge der gegenüberliegenden Seite, so ist
sin(α) =
α
.
2R
— Version vom: 16. September 2008 —
7. Vorl. — 20. Mai ’08
Kreise am Dreieck:
Um–, In–, Ankreise,
Feuerbachkreis
34
Details im Skript von
Barth S. 42
1 Euklidische Geometrie
Beweis.
⊔
⊓
Satz 1.43 (Symmetrische Formel für den Umkreisradius). Der Umkreisradius
eines Dreiecks mit den Seiten a, b, c und der Fläche F∆ ist:
R=
Details im Skript von
Barth S. 42
a·b·c
.
4 · F∆
Beweis. In der Vorlesung nicht vorgeführt.
⊔
⊓
Satz 1.44 (Abstand zum Umkreismittelpunkt). Der Punkt X der Ebene R2 sei
gegeben als Affinkombination
X = λA + µB + νC,
λ + µ + ν = 1,
der Ecken A, B, C eines Dreiecks. Dann gilt:
kX − Mk2 = R2 − (µνa2 + λνb2 + λµc2 ).
Details im Skript von
Barth S. 42
Beweis. In der Vorlesung nicht vorgeführt.
⊔
⊓
Der Schnittpunkt W der Winkelhalbierenden hat von allen drei Seiten des
Dreiecks den gleichen Abstand. Deswegen gibt es einen Kreis mit W als
Mittelpunkt, der alle drei Seiten berührt.
Definition 1.45. Der Inkreis eines Dreiecks ABC ist der Kreis, der alle Seiten
Dreiecks von innen berührt. Seinen Radius notieren wir mit r.
Die innere und die äußere Winkelhalbierende eines Dreiecks ABC stehen senkrecht aufeinander. Jeweils zwei äußere Winkelhalbierende, z.B. jene durch B
und jene durch C, treffen sich in einem Punkt WA , durch den auch die dritte
innere Winkelhalbierende, nämlich jene durch A, geht. Genauso wie beim
Inkreis gibt es einen Kreis mit diesem Mittelpunkt WA , der alle drei Seiten
berührt, der Ankreis kA des Dreiecks. Analog gibt es natürlich auch Ankreise
kB , kC mit den Mittelpunkten WB , WC . Genaus wie die Formel für den Inkreismittelpunkt W (siehe z.B. Abschnitt 1.4.4) ergeben sich die Formeln für die
Ankreismittelpunkte:
Satz 1.46 (Ankreismittelpunkte). Die Mittelpunkte der Ankreise sind:
1
· (−a·A + b·B + c·C),
2(s − a)
1
· (a·A − b·B + c·C),
WB =
2(s − b)
1
WC =
· (−a·A + b·B − c·C).
2(s − c)
WA =
— Version vom: 16. September 2008 —
1.6 Kreise am Dreieck
Beweis. In der Vorlesung nicht vorgeführt.
35
⊔
⊓
Satz 1.47 (Inkreisradius). Der Inkreisradius ist
r
(s − a)(s − b)(s − c)
F∆
r=
=
.
s
s
Beweis.
⊔
⊓
Details im Skript von
Barth S. 44
Details im Skript von
Barth S. 45
Ähnlich ergeben sich die Ankreisradien rA , rB , rC ; wir benutzen dafür folgenden Hilfssatz:
Satz 1.48 (Hilfssatz über Ankreise). Der Ankreis mit Mittelpunkt WA berührt
die Dreiecksseiten b und c in Punkten, die von der Ecke A den Abstand s haben.
Beweis.
⊔
⊓
Satz 1.49 (Ankreisradius). Der Radius des Ankreises, der die Seite a von außen
berührt, ist
r
s(s − b)(s − c)
F∆
ra =
=
.
s−a
s−a
Beweis. In der Vorlesung nicht vorgeführt.
⊔
⊓
Details im Skript von
Barth S. 45
Details im Skript von
Barth S. 46
Aus 1.47 und 1.49 folgt sofort:
Korollar 1.50.
a·b·c
.
4·s
Satz 1.51 (Euler). Der Abstand d zwischen den Mittelpunkten M und W von Umund Inkreis eines Dreiecks erfüllt zusammen mit Um- und Inkreisradius die folgende
Gleichung:
d2 = R · (R − 2r).
R·r=
Daraus folgt insbesondere:
R ≥ 2r.
Beweis. Wir setzen den Inkreismittelpunkt W in die Formel aus dem Satz
über den Abstand eines Punktes zum Umkreismittelpunkt ein. Dies liefert
die Formel. Weitere Details in der Vorlesung nicht vorgeführt.
⊔
⊓
Bemerkung 1.52. Die Formel von Euler ist wesentlich interessanter als man auf
den ersten Blick meinen könnte.
Definition 1.53. Die Seitenmitten A′ = 21 (B + C) usw. eines Dreiecks ABC bilden die Ecken des Mittendreiecks. Der Feuerbachkreis oder 9-Punkte-Kreis eines
Dreiecks ABC ist der Kreis durch die drei Seitenmitten A′ , B′ , C′ .
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 46–47
Details im Skript von
Barth S. 47
36
1 Euklidische Geometrie
Offenbar ist das Mittendreieck ähnlich zum Ausgangsdreieck mit Ähnlichkeitsfaktor 12 . Insbesondere ist sein Umkreisradius, also der Radius des Feuerbachkreises:
1
R′ = R.
2
Satz 1.54 (Feuerbachgleichung). Für den Mittelpunkt F des Feuerbachkreises gilt:
F=
1
1
3
S − M = (H + M).
2
2
2
Der Mittelpunkt F des Feuerbachkreises ist also eine Affinkombination der
Punkte S und M, d.h.:
Korollar 1.55. Der Mittelpunkt F des Feuerbachkreises liegt auf der Eulergeraden.
Details im Skript von
Barth S. 48
Satz 1.56 (Feuerbach, Brianchon, Poncelet). Auf dem Feuerbachkreis liegen außer den drei Seitenmitten des Ausgangsdreiecks auch noch dessen drei Höhenfußpunkte und die Mittelpunkte der drei Strecken zwischen dem Höhenschnittpunkt H
und den drei Eckpunkten.
Beweis.
⊔
⊓
Satz 1.57 (Feuerbach). Der Feuerbachkreis berührt den Inkreis und die drei Ankreise des Dreiecks.
Details im Skript von
Barth S. 49–50
Beweis. In der Vorlesung nicht vorgeführt.
⊔
⊓
1.7 Dynamische Geometrie im Kontext euklidischer
Geometrie
8. Vorl. — 26. Mai ’08
Dynamische Geometrie im Kontext eukl.
Geom.
Dieser Abschnitt ist einer der zentralen der ganzen Vorlesung. Wir erklären
hier, was statische und dynamische Geometrie, was deterministische und
kontinuierliche Dynamische Geometrie Systeme unterscheidet und wie Kontinuität, zumindest prinzipiell, verwirklicht werden kann.
Wir folgen im Wesentlichen U. Kortenkamps Dissertation [Kor99]. Unsere
Darstellung muss dabei leider etwas vage bleiben, da wir nicht die nötigen
Voraussetzungen aus der Informatik bereitgestellt haben. Für das qualitative
Verständnis der Phänomene ist dies aber auch nicht unbedingt nötig.
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
37
1.7.1 Kontinuität versus Determinismus
Im gesamten Abschnitt gehen wir zur Vereinfachung davon aus, dass die
einzigen Eingabe–Daten in ein Dynamisches Geometrie System die Koordinaten von Punkten und die Information über Geraden durch Punkte bzw.
Kreise mit Mittelpunkten und Aufpunkten sind. Prinzipiell ändert sich durch
die Hinzunahme weiterer Eingabedaten, wie beispielsweise Geraden, die
durch Aufpunkt und Steigung gegeben werden, nichts. Ausgabe–Daten sind
aus Eingabe–Daten durch iteriertes Schneiden konstruierte Punkte, Geraden,
Kreise.
Beispiel 1.58. 1. Winkel–Halbierung in EDG: stetiges Verhalten.
Problem:
Skizze fehlt:
fig:WinkelHalbierung!
fig:WinkelHalbierung
Abbildung 1.4. SKIZZE fig:WinkelHalbierung FEHLT!
2. Winkel–Viertelung in EDG: unstetiges Verhalten, plötzlicher
Sprung. In C oder GG (mit Kontinuität eingeschaltet):
stetiges Verhalten.
Problem:
Skizze fehlt:
fig:WinkelViertelung!
fig:WinkelViertelung
Abbildung 1.5. SKIZZE fig:WinkelViertelung FEHLT!
— Version vom: 16. September 2008 —
38
1 Euklidische Geometrie
3. Schnittpunkt zweier Kreise von gleichem Radius springt nach unten,
wenn sich der Mittelpunkt des einen durch den Mittelpunkt des anderen läuft: wie Winkel–Viertelung.
Problem:
Skizze fehlt:
fig:Schnittpunkt2KreiseSpringt!
fig:Schnittpunkt2KreiseSpringt
Abbildung 1.6. SKIZZE fig:Schnittpunkt2KreiseSpringt FEHLT!
⊔
⊓
Definition 1.59. 1. Ein Dynamisches Geometrie System heißt deterministisch,
wenn es für eine feste Menge von Eingabepositionen der Punkte immer die
gleichen Ausgabepositionen liefert.
2. Ein Dynamisches Geometrie System heißt kontinuierlich, wenn es das sogenannte Kontinuitätsprinzip verwirklicht: Kleine Änderungen in den Eingabepositionen der Punkte führen zu kleinen Änderungen in den Ausgabepositionen.
Wie man anhand der obigen Beispiele nachprüfen kann, ist EDG eher ein deterministisches und C eher ein kontinuierliches
Dynamisches Geometrie System. Manche dynamischen Geometrie Systeme,
wie GG, bilden gewollt eine Mischform, um einige (aber nicht alle)
unerwünschten Phänomene zu beseitigen; viele Systeme bilden allerdings
ungewollt eine Mischform, da sie entweder den Determinismus oder aber
die Kontinuität nicht perfekt umsetzen. Das prinzipielle Problem hierbei ist
der folgende Satz:
Satz 1.60. Determinismus und Kontinuität sind nicht gleichzeitig für ein Dynamisches Geometrie System möglich.
Beweis. Wir betrachten die Winkel-Viertelung in einem kontinuierlichen System; in Abb. 1.7 ist dies der Winkel zwischen der schwarzen gestrichelten
und der schwarzen durchgezogenen Geraden.
Am Anfang vierteln wir den Winkel 0◦ , d.h. die (rote) Gerade, die den geviertelten Winkel beschreibt, ist auch die horizontale Gerade (linkes Bild). Wir
betrachten dann die Situation (mittleres Bild) nach einer viertel Umdrehung
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
39
Abbildung 1.7. Winkel-Viertelung.
der schwarzen Geraden, so dass sich die rote Gerade also insgesamt um 14 ·90◦
gedreht hat.
Schließlich betrachten wir die Situation nach einer kompletten Umdrehung.
In einem kontinuierlichen System hat sich der geviertelte Winkel um 90◦
gedreht; in einem deterministischen System muss, da die Eingabedaten die
gleichen wie am Anfang sind, die den geviertelten Winkel beschreibende
Gerade wieder die horizontale Gerade sein. Dies sind zwei verschiedene
Situationen, die nicht gleichzeitig auftreten können.
⊔
⊓
Versuche des Ausbesserns einiger dieser Probleme durch Hinzufügen zusätzlicher Daten, wie z.B. die Richtung von Geraden, hilft nur in einigen Fällen.
Im Allgemeinen gilt nämlich das Folgende:
Satz 1.61. Endliche viele Bits an zusätzlichen Daten reichen nicht, um ein deterministisches Dynamisches Geometrie System kontinuierlich zu machen.
Beweis. Iteriertes Winkel-Halbieren liefert Winkel-2n -telung. Um dies in einem deterministischen System zu verwirklichen, benötigt man mindestens n
zusätzliche Bits.
⊔
⊓
1.7.2 Kontinuität in einem Dynamischen Geometrie System
Tracing
Am Beispiel der Winkel-Viertelung kann man verstehen, wie man einen ersten Ansatz für ein kontinuierliches Dynamisches Geometrie System verwirklichen kann: Man merkt sich jeweils die aktuelle Position der Eingabedaten
und für die mehrdeutigen Punkte merkt man sich außerdem deren aktuelle
Position. Wird dann die Maus verschoben, wählt man die nächste mehrdeutige Position so, dass das Verhalten des Systems stetig ist.
Wir werden im Folgenden sehen, dass sich das im Prinzip zwar leicht anhört,
dass man aber im Detail einige Probleme zu lösen hat.
— Version vom: 16. September 2008 —
40
1 Euklidische Geometrie
Complex Tracing
Das Tracing, das wir im vorigen Abschnitt beschrieben haben, kann man
natürlich genauso auch im Komplexen durchführen, da hier auch ein Abstandsbegriff existiert. Bevor wir diese Methode, die von C eingesetzt wird, erläutern, geben wir, auch, um unsere verwendeten Notationen
einzuführen, einen kurzen Überblick über komplexe Zahlen.
Einschub: Komplexe Zahlen
Offenbar hat ein Polynom vom Grad d in einer Variablen x höchstens d Nullp
stelllen, da aus p(x0 ) = 0 folgt x − x0 | p und daher ist x−x0 ein Polynom vom
Grad d − 1.
Jedes Polynom mit reellen Koeffizienten vom Grad 1 besitzt, wie jedes reelle Polynom vom ungeraden Grad, auch eine reelle Nullstelle, wegen des
Zwischenwertsatzes. Doch es gibt Polynome vom Grad 2, die keine reelle
Nullstelle besitzen, wie z.B. f (x) = x2 + 1. Ist i eine Nullstelle von diesem f ,
so definiert man mit
C := {a + ib | a, b ∈ R}
die komplexen Zahlen; dies ist ein Körper, i heißt imaginäre Einheit. C ist
offenbar ein 2-dimensionaler R-Vektorraum (Abb. 1.8, links). Daher kann
man insbesondere den Abstand zweier komplexer Zahlen z1 = a1 + ib1 und
z2 = a2 + ib2 leicht mit dem Satz von Pythagoras berechnen:
d(z1 , z2 ) =
p
(a1 − a2 )2 + (b1 − b2 )2 .
Abbildung 1.8. Komplexe Zahlen in Polarkoordinaten.
Häufig ist es aber vorteilhaft, anstatt der Vektor der beiden karthesischen
Koordinaten a, b für eine komplexe Zahl Polarkoordinaten zu verwenden:
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
41
z = reiϕ (Abb. 1.8, rechts). Jede der beiden Notationen hat ihre Vorteile. Insbesondere für die Multiplikation zweier komplexer Zahlen ist die letztere
hilfreich:
r1 ·eiϕ1 · r2 ·eiϕ2 = (r1 ·r2 ) · ei(ϕ1 +ϕ2 ) .
Umgekehrt kann man dies natürlich benutzen, um recht leicht die beiden
Wurzeln aus einer komplexen Zahl z ∈ C zu ziehen, d.h. die beiden Zahlen
z1 , z2 , für die gilt: (z1 )2 = z, (z2 )2 = z.
Um das Tracing im Komplexen auch visuell erläutern zu können, führen wir
für einen Punkt Z = (Z1 , Z2 ) = (a1 + ib1 , a2 + ib2 ) ∈ C2 in der komplexen Ebene
folgende Notation ein, die im R2 zu veranschaulichen ist (s. Abb. 1.9): Wir
stellen Z dar im R2 als Punkt mit den Koordinaten (a1 , a2 ), an den horizontal
bzw. vertikal Vektoren der Länge b1 bzw. b2 eingezeichnet werden, deren
Richtung (links/rechts bzw. oben/unten) das Vorzeichen +, − von b1 bzw. b2
ausdrückt.
Abbildung 1.9. Ein komplexer Vektor Z = (a1 + ib1 , a2 + ib2 ), dargstellt im R2 .
Tracing im Komplexen
Wie im vorigen Abschnitt erläutert, können wir natürlich Abstände zwischen
Punkten berechnen und daher ein Tracing durchführen.
Beispiel 1.62. 1. Einheitskreis mit x = λ schneiden für λ > 1.
2. Konstruktion des Mittelpunktes zweier Punkte mit Hilfe zweier Kreise
von festem Radius. Dies funktioniert auch, wenn die Kreise sich nicht
schneiden, wenn man komplexes Tracing benutzt.
3. Analog: Beispiel mit drei Kreisen (nicht in Vorlesung gezeigt).
⊔
⊓
— Version vom: 16. September 2008 —
42
1 Euklidische Geometrie
Singularitäten
Wir haben im vorigen Abschnitt verschwiegen, dass beim Übergang vom
Fall, in dem die Schnittpunkte reell sind zum Fall, in dem die Schnittpunkte
nicht reell sind, der Fall eintritt, dass beide Schnittpunkte zusammenfallen!
Wie soll man, z.B. im Fall der Mittelpunktskonstruktion von oben, entscheiden, welche der beiden komplexen Lösungen nach dem Durchlaufen der
Singularität genommen wird?
Das vielleicht einfachste Beispiel, bei dem dieses Problem auftritt, ist das
folgende:
Beispiel 1.63. Schnitt eines Kreises mit einer Geraden. Beim Übergang der
Situation mit zwei reellen Schnittpunkten zu jener mit zwei nicht reellen
Schnittpunkten entsteht die Situation des doppelten Schnittpunktes. Färbt
man den oberen reellen Schnittpunkt grün ein, den unteren rot, so stellt sich
die Frage, welcher der komplexen Schnittpunkte grün, welcher aber rot sein
soll.
⊔
⊓
Abbildung 1.10. Kreis und Gerade.
Lokale und globale Konsistenz
Bisher haben wir immer nur eine problematische Situation lokal betrachtet.
Aber man kann das Kontinuitätsproblem nicht lokal betrachten, wie das
folgende Beispiel zeigt:
Beispiel 1.64. Wir betrachten zwei gleich große Kreise mit den Mittelpunkten
M1 und M2 . Eine Parallele zur Gerade M1 M2 durch die Mittelpunkte schneide
die Kreise in A1 bzw. A2 (Abb. 1.11). Damit die Konstruktion global konsistent
bleibt, möchte man, dass die Abstände |A1 A2 | und |M1 M2 | gleich bleiben für
alle Instanzen der Konstruktion. Insbesondere sollen die Abstände gleich
bleiben, wenn die Parallele nach oben gezogen wird, bis sie die Kreise nicht
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
43
mehr schneidet, und dann wieder nach unten gezogen wird, wie in der
Abbildung. Dazu muss das dynamische Geometrie Programm sicher stellen,
dass bei beiden Kreisen jeweils der linke bzw. rechte Schnittpunkt passend
gewählt wird.
⊔
⊓
Abbildung 1.11. Lokale und globale Konsistenz.
Hebbare Singularitäten
Wie in der Funktionentheorie gibt es in der dynamischen Geometrie hebbare
Singularitäten, d.h. Singularitäten, die zwar existieren, die man aber auf offensichtliche Weise beheben kann. Im Folgenden dazu ein Beispiel; trotzdem
bleiben immer noch die meisten Situation, die man nich so einfach klären
kann.
Beispiel 1.65. Funktionen mit Unstetigkeitsstellen: Wir betrachten die Funk2
−a2
tion f : R\{a} → R, f (x) = xx−a
. Diese hat eine hebbare Singularität für
x = a, denn f ist hier nicht definiert, man kann f aber problemlos auf
ganz R in stetiger Weise fortsetzen, da die Grenzwerte für x → a von
links und rechts übereinstimmen.
Dynamische Geometrie: Nehmen wir noch einmal das Beispiel der zwei
gleich großen Kreise (Abb. 1.12). Zwar schneiden sich die beiden Kreise im mittleren Bild nicht in einem Punkt (sondern im ganzen Kreis, da
sie ja identisch sind), doch kann man, wenn man nur einen Punkt als
Lösung haben möchte, diese Lösung durch Grenzwertbildung einfach
finden.
Abbildung 1.12. Schnittpunkte zweier gleich großer Kreise.
⊔
⊓
— Version vom: 16. September 2008 —
44
1 Euklidische Geometrie
Kontinuität beim Auftreten von Singularitäten
Dieser Abschnitt enthält die wichtigste Idee, die das Kontinuitätsprinzip in
dynamischen Geometrie Systemen ermöglicht.
Eingaben sind diskret
Zunächst bemerken wir, dass die Eingaben in einem dynamischen Geometrie System gar nicht kontiuierlich erfolgen, sondern aus einzelnen MausKoordinaten bestehen, die jeweils einen kleinen (oder großen) Abstand voneinander haben! Selbst, wenn die Maus nacheinander auf zwei benachbarten Bildschirmpixeln ist, haben die daraus resultierenden Mauskoordinaten
einen gewissen Abstand, nämlich gerade die Breite eines Pixels.
Abbildung 1.13. Die Eingaben in ein dynamisches Geometrie Programm sind diskret.
Kontinuität können wir beispielsweise erreichen, indem wir die Punkte durch
Strecken verbinden und so einen Streckenzug erhalten.
Die wesentliche Idee
Wie wirkt sich die Tatsache, dass wir nur in diskreten Punkten MausKoordinaten erhalten, auf das folgende Beispiel des Schnitts eines Kreises
mit einer wandernden vertikalen Geraden aus?
Beispiel 1.66. Wir betrachten die Schnittpunkte des Einheitskreises k : x2 +
y2 = 1 mit der vertikalen Geraden l : x = λ. Die Startposition, also die erste
Mausposition, liefere λ = 0, die Endposition, also die nächste Mausposition,
λ = 2.
⊔
⊓
Zunächst haben wir, wenn wir eine Position für λ = 0 mit λ = 2 durch
eine Strecke verbinden, das Problem, dass wir wieder durch eine Singularität
laufen im Punkt (1, 0) für λ = 1.
Doch wer zwingt uns, diesen kürzesten, direkten Verbindungsweg
λ0 : [0, 1] → R, t 7→ 2t.
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
45
Abbildung 1.14. Kreis x2 + y2 = 1 mit der vertikalen Geraden x = λ.
zwischen den beiden Instanzen der Konstruktion zu wählen? Statt dessen
können wir einfach einen Umweg gehen, der die Singularität vermeidet und
für den auch λ0 (0) = 0, λ0 (1) = 2 gilt!
Wir berechnen dazu zunächst, für welche λ überhaupt eine Singularität auftritt, d.h. für welche λ beide Schnittpunkte des Kreises k und der Geraden l
übereinander fallen. Es gilt:
√
x2 + y2 = 1, x = λ ⇐⇒ y2 = 1 − λ2 , x = λ ⇐⇒ (x, y) = (λ, ± 1 − λ2 ).
y hat also genau dann eine doppelte Nullstelle, wenn 1 − λ2 = 0, d.h. wenn
λ2 = 1 bzw. λ = ±1. Die einzigen beiden Fälle, bei denen eine Singularität
auftritt, sind also jene der Geraden x = −1 und x = 1. Insbesondere gibt es
auch keine komplexen λ, für die eine doppelte Nullstelle auftritt!
Ein Umweg, der die Singularität bei x = 1 vermeidet, ist daher:
λ1 : [0, 1] → C, t 7→ 1 − e−iπt .
Es gilt: λ1 (0) = 1 − 1 = 0 = λ0 (0), λ1 (1) = 2 = λ0 (1). Erweitern wir λ1 auf das
Intervall [0, 2], so gilt insgesamt: λ1 (2) = 1 − 1 = 0 = λ1 (0), λ1 ( 21 ) = 1 − (−i) =
1 + i, λ1 ( 23 ) = 1 − i. Der Weg λ1 : [0, 2] → C läuft also einmal im Uhrzeigersinn
um die Singularität bei λ = 1 herum.
Abbildung 1.15. Umwege um die Singularität bei λ = 1.
— Version vom: 16. September 2008 —
46
1 Euklidische Geometrie
Ein anderer möglicher Pfad für λ, der einmal im Uhrzeigersinn um die Singularität bei λ = 1 herum läuft, ist der stückweise lineare Pfad λ2 : [0, 2] →
C, t 7→ λ2 (t) mit λ2 (0) = 0, λ2 ( 21 ) = 1 + i, λ2 (1) = 2, λ2 ( 23 ) = 1 − i.
Es ist leicht, für einen der beiden Wege, entweder λ1 oder λ2 , eine WerteTabelle aufzustellen, für verschiedene Werte von t. Die Tabelle 1.1 verwendet
den stückweise linearen Weg λ2 für t im Abstand von 16 . Man kann dabei klar
erkennen, dass P und Q den Platz tauschen auf dem Weg von λ = 0 über
λ = 2 zurück nach λ = 0. Ist ε (hier ε = 61 ) nämlich die Schrittweite für t, so
heißt jener der beiden Schnittpunkte zum Zeitpunkt t + ε P(t + ε), der den
kleineren Abstand zum Punkt P(t) hat.
t
λ
0
0.17
0.33
0.5
0.67
0.83
1
1.17
1.33
1.5
1.67
1.83
2
0
(0.33+i ·0.33)
(0.67+i ·0.67)
(1+i ·1)
(1.33+i ·0.67)
(1.67+i ·0.33)
2
(1.67-i ·0.33)
(1.33-i ·0.67)
(1-i ·1)
(0.67-i ·0.67)
(0.33-i ·0.33)
0
(P1 (t) , P2 (t))
(Q1 (t) , Q2 (t))
(0 , -1)
((0.33+i ·0.33) , (-1.01+i ·0.11))
((0.67+i ·0.67) , (-1.08+i ·0.41))
((1+i ·1) , (-1.27+i ·0.79))
((1.33+i ·0.67) , (-0.86+i ·1.03))
((1.67+i ·0.33) , (-0.41+i ·1.35))
(2 , (i ·1.73))
((1.67-i ·0.33) , (0.41+i ·1.35))
((1.33-i ·0.67) , (0.86+i ·1.03))
((1-i ·1) , (1.27+i ·0.79))
((0.67-i ·0.67) , (1.08+i ·0.41))
((0.33-i ·0.33) , (1.01+i ·0.11))
(0 , 1)
(0 , 1)
((0.33+i ·0.33) , (1.01-i ·0.11))
((0.67+i ·0.67) , (1.08-i ·0.41))
((1+i ·1) , (1.27-i ·0.79))
((1.33+i ·0.67) , (0.86-i ·1.03))
((1.67+i ·0.33) , (0.41-i ·1.35))
(2 , (-i ·1.73))
((1.67-i ·0.33) , (-0.41-i ·1.35))
((1.33-i ·0.67) , (-0.86-i ·1.03))
((1-i ·1) , (-1.27-i ·0.79))
((0.67-i ·0.67) , (-1.08-i ·0.41))
((0.33-i ·0.33) , (-1.01-i ·0.11))
(0 , -1)
Tabelle 1.1. Eine Tabelle der gerundeten Koordinaten der beiden Schnittpunkte P und
Q der Geraden x = λ mit dem Einheitskreis x2 + y2 = 1. Man kann klar erkennen,
dass P und Q den Platz tauschen auf dem Weg von λ = 0 über λ = 2 zurück nach
λ = 0. Ist ε nämlich die Schrittweite für t, so heißt jener der beiden Schnittpunkte zum
Zeitpunkt t + ε P(t + ε), der den kleineren Abstand zum Punkt P(t) hat.
Dabei stellt man fest, dass man, wenn man diesen Pfad kontinuierlich durchläuft, am Ende mit λ2 (2) = 0 wieder am Ausgangspunkt angekommen ist,
dass aber die beiden Schnittpunkte den Platz getauscht haben! Gleiches gilt,
wenn man λ1 verwendet. Verwendet man die Notation für komplexe Punkte
Z ∈ C2 in der reellen Ebene, die in der Abb. 1.9 eingeführt wurde, so lässt
sich diese Vertauschung gut veranschaulichen, siehe Abb. 1.16.
Diesen Effekt nennt man Monodromie. Leider können wir dieses Thema
nicht vertiefen; hierfür wäre eine eigene Vorlesung in Singularitätentheorie
nötig.
— Version vom: 16. September 2008 —
1.7 Dynamische Geometrie im Kontext euklidischer Geometrie
47
Abbildung 1.16. Vertauschung durch den Monodromie–Effekt: Der Übersichtlichkeit
halber zeigt die Abbildung nur die Punkte Q1 (0), . . . , Q1 (1) und P1 (0), . . . , P1 (0), die
ja jeweils die gleiche x–Koordinate besitzen. Die Pfeile deuten dabei die imaginären
Anteile der beiden komplexen Koordinaten der Punkte an, wie in Abb. 1.9 erläutert.
Kontinuität und Intuition
Kontinuität ist in einigen Fällen nicht intuitiv sinnvoll.
Beispiel 1.67. Schnittpunkt der Winkelhalbierenden im Dreieck ABC in C. Wenn B durch A wandert, wandert der Schnittpunkt der Winkelhalbierenden von innen nach außen und wieder zurück wegen der Kontinuität.
Da man intuitiv den Schnittpunkt der Winkelhalbierenden im Dreiecksinneren erwartet, ist man vielleicht bei diesem Verhalten etwas verwundert. ⊓
⊔
Abbildung 1.17. Schnitt der Winkelhalbierenden im Dreieck.
Beispiel 1.68. Natürlich ist auch in vielen Fällen das Wandern des Schnittpunkts eines Kreises mit einer Geraden bzw. zweier Kreise von oben nach
unten nicht intuitiv.
⊔
⊓
1.7.3 Fazit
Weder Determinismus noch Kontinuität sind das Allheilmittel; beides gleichzeitig ist aus prinzipiellen Gründen nicht realisierbar. Kontinuität ist manch— Version vom: 16. September 2008 —
48
1 Euklidische Geometrie
mal entgegen der Intuition, aus Determinismus resultieren häufig plötzliche,
kaum vorhersehbare Sprünge.
Um ein in der Praxis gut einsetzbares System zu verwirklichen, müsste man
also auf ein Mischsystem ausweichen, was aber vermutlich auch nicht oder
sehr schwer zu realiseren ist. In GG ist eine reelle Kontinuität umgesetzt, was ein Kompromiss zwischen den beiden extremen ist, die wir
vorgestellt haben. Außerdem kann man in dieser Software bei Bedarf einen
Schalter umlegen, so dass GG fortan deterministisch arbeitet. In vielen
Fällen ist dies, was man als Benutzer gerne hätte.
Allerdings werden wir sehen, dass Cs konsequent kontinuierlicher
Ansatz durch die Benutzung der komplexen Zahlen demgegenüber einige
Vorteile besitzt.
Insgesamt bleibt der Eindruck zurück, dass der Nutzer in jedem Fall über
die Probleme, die bestehen, Bescheid wissen muss, um in der jeweiligen Anwendung zu entscheiden, welches System für die gewünschte Konstruktion
das richtige ist. Meiner Meinung nach wird dies meistens C oder
die kontinuierliche Variante von GG sein, da die gelegentliche NichtIntuitivität häufig das geringere Übel ist oder sogar überhaupt nicht bemerkt
wird. Zusätzlich ist bei einer solchen Entscheidung natürlich die Benutzung
des Programmes zu berücksichtigen; hier scheint C gravierende
Nachteile zu haben, wenn ich die Reaktionen von potentiellen Nutzern, mit
denen ich bisher gesprochen habe, in Betracht ziehe. Ob die Vorteile der
Kontinuität die vielleicht gewöhnungsbedürftige Benutzung von C aufwiegt, oder ob man doch lieber ein deterministisch ausgerichtetes System oder den Mischweg GG vorzieht, muss jeder für sich selbst und
je nach Anwendung entscheiden.
— Version vom: 16. September 2008 —
2
Affine Geometrie
9. Vorl. — 27. Mai ’08
Affine Transf., AxioIm vorigen Kapitel haben wir erste Sätze über euklidische Geometrie hergeme aff. Geom., Parallelleitet, also Aussagen, in denen Winkel und Abstände eine wesentliche Rolle proj.
spielen. Es gibt aber auch viele faszinierende Eigenschaften, die man auch
ohne diese Konzepte studieren kann und die daher zur affinen Geometrie
gehören.
Wir haben bereits im einleitenden Kapitel gesehen, dass hierzu das Teilverhältnis dreier Punkte auf einer Geraden gehört, da dieses invariant unter
affinen Transformationen ist. Mit dessen Hilfe werden wir hier einige sehr
interessante Sätze, wie beispielsweise jene von Ceva, Menelaos, Pappos und
Desargues beweisen.
Im Anschluss daran werden wir die affine Variante von Kreisen, nämlich sogenannte Kegelschnitte und insbesondere Ellipsen, genauer behandeln. Deren
Geometrie ist so reichhaltig, dass nur über Kegelschnitte ganze Bücher verfasst wurden (z.B. G. Salmon im 19. Jahrhundert). Wir greifen hier nur einige
der wesentlichsten Fakten heraus und verweisen für weitere Informationen
auf die umfangreiche Literatur.
2.1 Affine Transformationen
2.1.1 Affinkombinationen
Auch affine Transformationen, die, wie wir in der Einleitung bereits erwähnt
haben, von der Form F : Kn → Kn , F(X) = T + MX sind für einen gewissen
Verschiebungsvektor T ∈ Kn und eine gewisse invertierbare Matrix M ∈
GL(n, K), können wir als eine einzige Matrixmultiplikation schreiben. Dazu
erweitern wir X ∈ Kn zu
!
1
X′ :=
∈ Kn+1
X
50
2 Affine Geometrie
und die Matrix M zu
M′ :=
!
1 0
∈ GL(n + 1, K).
TM
Das Produkt dieser erweiterten Matrix mit dem erweiterten Vektor ist dann:
!
!
!
1 0
1
1
′ ′
MX =
·
=
= (F(X))′ .
TM
X
t+M·X
Wir werden sehen, dass diese Notation wesentlich mehr als nur eine verkürzende Schreibweise für affine Abbildungen ist. Zunächst bemerken wir
dazu, dass alle erweiterten Vektoren X′ = (1, X1 , . . . , Xn ) ∈ Kn+1 in der affinen
Hyperebene
A := {X ∈ Kn+1 | X0 = 1}
liegen. Ferner sind die erweiterten Matrizen genau die Matrizen, deren zugehörige lineare Abbildungen diese affine Hyperebene A auf sich abbilden
und die affinen Abbildungen Kn → Kn sind gerade die Einschränkungen
jener linearen Abbildungen Kn+1 → Kn+1 auf A, die A auf sich überführen.
Die affine Hyperebene A kann man als Kn auffassen; allerdings hat A keinen
Nullvektor und ist daher auch kein Vektorraum.
Doch nun zu einem zentralen Begriff der affinen Geometrie, nämlich dem
Gegenstück zu Linearkombinationen
X = λ1 X1 + · · · + λk Xk , λ1 , . . . , λk ∈ K, X1 , . . . , Xk ∈ Kn
der linearen Algebra: Eine Linearkombination
′
X =
λ1 X1′
+···+
λk Xk′
λ1 + · · · + λk
=
λ1 X1 + · · · + λk Xk
!
von Vektoren X1′ , . . . , Xk′ ∈ A gehört offenbar genau dann wieder zum affinen
Raum A, wenn λ1 + · · · + λk = 1. Dies führt auf den bereits in 0.12 definierten
Begriff der Affinkombination: Eine Linearkombination λ1 X1 + · · · λk Xk von
Vektoren X1 , . . . , Xk ∈ Kn heißt Affinkombination, falls λ1 + · · · + λk = 1 ist.
Dass diese tatsächlich in der affinen Geometrie die gleiche Rolle spielen wie
Linearkombinationen in der linearen Algebra, zeigen die folgenden Resultate:
Satz 2.1. Es sei F : Kn → Kn eine affine Abbildung. Dann gilt für jede Affinkombination X = λX1 + · · · + λk Xk ∈ Kn , λ1 + · · · + λk = 1:
F(X) = λ1 F(X1 ) + · · · + λk F(Xk ).
Beweis. Wie 0.3.
⊔
⊓
— Version vom: 16. September 2008 —
2.1 Affine Transformationen
51
Eine weitere wesentliche Eigenschaft von Linearkombinationen X = λ1 X1 +
· · ·+λk Xk ist, dass deren Koeffizienten eindeutig durch X bestimmt sind, wenn
nur die Vektoren X1 , . . . , Xk linear unabhängig sind. Die erweiterten Vektoren
X1′ , . . . , Xk′ ∈ Kn+1 einer Linearkombination X′ = λ1 X1′ + · · · + λk Xk′ ∈ Kn+1 sind
linear unabhängig, falls
!
1 ··· 1
= k.
Rg
X1 · · · Xk
Durch Subtraktion einer Spalte von den anderen ergibt sich:
!
!
1
0
···
0
1 ··· 1
= Rg
Rg
= 1 + Rg X2 − X1 · · · Xk − X1 .
X1 X2 − X1 · · · Xk − X1
X1 · · · Xk
Die k erweiterten Vektoren X1′ , . . . , Xk′ ∈ A ⊂ Kn+1 sind also genau dann linear
unabhängig, wenn es die k − 1 Vektoren X2 − X1 , . . . , Xk − X1 ∈ Kn sind. Wir
führen daher folgenden Begriff ein:
Definition 2.2. Die k Punkte X1 , . . . , Xk im affinen Raum Kn+1 heißen affin unabhängig, wenn die k − 1 Vektoren X2 − X1 , . . . , Xk − X1 linear unabhängig sind.
Hierbei hätte man X1 durch einen beliebigen der anderen Vektoren austauschen können. Aus den obigen Rechnungen folgt:
Satz 2.3 (Koeffizienten von unabhängigen Affinkombinationen). Sind die
Punkte X1 , . . . , Xk affin unabhängig, so sind die Koeffizienten λ1 , . . . , λk einer Affinkombination X = λ1 X1 + · · · + λk Xk , λ1 + · · · + λk = 1 durch X eindeutig bestimmt.
2.1.2 Axiome ebener affiner Geometrie
Unserer Zugang zur affinen Geometrie war bisher über die lineare Algebra,
über die wir ja die affinen Transformationen definiert hatten. Man kann aber,
ähnlich wie Euklid in seinen Elementen (s. z.B. [Joy96]), auch von einigen
sehr elementaren Annahmen, sogenannten Axiomen, ausgehen.
Diese sind drei Eigenschaften, die Punkte und Geraden in der affinen Ebene K2 , die wir bisher betrachtet hatten, in offensichtlicher Weise erfüllt sind.
Genauso wie Euklids erste Definition „Ein Punkt ist, was keine Teile hat.“ beruht unser Ansatz freilich, wie die gesamte Mathematik, auf einem wenig
fundierten Konzept, nämlich dem der Menge (s. dazu z.B. [Hal74]).
Definition 2.4. Eine affine Ebene ist eine Menge, deren Elemente wir Punkte
nennen, zusammen mit einer Menge von Untermengen, sogenannten Geraden, die
den unten stehenden Axiomen A1–A3 genügen. Für einen Punkt P und eine Gerade
l schreiben wir auch P liegt auf l oder l geht durch P für die Eigenschaft P ∈ l.
A1 Zu je zwei verschiedenen Punkten P, Q gibt es genau eine Gerade, die P und Q
enthält, notiert PQ.
— Version vom: 16. September 2008 —
52
2 Affine Geometrie
A2 Zu jeder Geraden l und jedem Punkt P, der nicht auf l liegt, gibt es genau eine
Gerade m zu l durch P), auf der P liegt und die keinen Punkt mit l gemeinsam
hat.
A3 Es gibt drei Punkte, die nicht auf einer gemeinsamen Geraden liegen.
Definition 2.5. Eine Menge von Punkten heißt kollinear, falls es eine Gerade gibt,
auf der alle Punkte liegen.
Zwei Geraden heißen parallel, wenn sie entweder identisch sind oder wenn sie
keinen Punkt gemeinsam haben. Notation: l k m. Daher wird Axiome A2 auch
Parallelenaxiom genannt.
Wie schon erwähnt, erfüllen natürlich die affinen Ebenen K2 , die wir im
vorigen Abschnitt beschrieben haben und deren Geraden wie üblich die Affinkombinationen zweier Punkte sind, diese Axiome. Man kann aber zeigen,
dass nicht alle affinen Ebenen, die die Definition auf Basis der drei Axiome
A1–A3 erfüllen, auch genau die Ebenen vom Typ K2 mit den Affinkombinationen als Geraden sein müssen. Das möchten wir hier nicht vertiefen. Für
einen axiomatischen Zugang zur affinen und projektiven Geometrie, der sehr
gut lesbar ist, verweisen wir daher auf [KK96].
Um Beziehungen wie liegt auf und geht durch einheitlicher formulieren zu
können, führen wir einen sehr symmetrischen neuen Begriff ein, der sich,
wie sich später noch herausstellen wird, als sehr nützlich erweisen wird:
Definition 2.6. Gilt für einen Punkt P und eine Gerade g, dass P ∈ g, so sagen wir,
P inzidiert mit g und g inzidiert mit P.
Hat eine affine Ebene endlich viele Punkte, so kann man die Inzidenzen von
Punkten und Geraden sehr anschaulich in einer sogenannten Inzidenzmatrix
verdeutlichen, in der im Feld i, j eine 1 eingetragen wird, falls der i–te Punkt
auf der j–ten Geraden liegt, sonst eine 0.
2.1.3 Parallelprojektionen in der Ebene
Nach diesem Ausflug in den axiomatische Zugang zur affinen Geometrie
kommen wir zurück zum Zugang auf Basis des Erlanger Programms, der
affine Objekte über affine Abbildungen studiert. Wir haben bereits in 0.15
gesehen, dass jede affine Abbildung Paare paralleler Geraden wieder auf
solche abbildet. Eine einzelne Gerade l kann unter einer affinen Abbildungen
aber natürlich auf eine Gerade m abgebildet werden, die nicht parallel zu
ihr ist. Jede Gerade können wir, da sie ja eine ein–dimensionaler affiner
Unterraum ist, als eine Kopie von K auffassen. Affine Abbildungen l → m
zwischen zwei Geraden sind daher sehr speziell und recht gut zu verstehen.
Wir betrachten zunächst eine sehr wichtige solche Abbildung:
— Version vom: 16. September 2008 —
2.1 Affine Transformationen
53
Definition 2.7. Seien l, m ⊂ K2 zwei affine Geraden. Außerdem sei p ⊂ K2 eine
weitere Gerade, die weder zu l noch zu m parallel ist. Die Parallelprojektion
π : l → m in Richtung von l ist die folgende Abbildung: Durch jeden Punkt X ∈ l
gibt es genau eine Gerade pX kp. Da diese nicht parallel zu m ist, gibt es genau einen
Schnittpunkt von pX mit m. Dieser ist das Bild π(X) von X.
Satz 2.8. Die Parallelprojektion π : l → m in Richtung p, wobei p eine weitere
Gerade ist, die weder zu l noch zu m parallel ist, ist eine affine und daher insbesondere
bijektive Abbildung.
Beweis.
⊔
⊓
Details im Skript von
Barth S. 55
Bemerkung 2.9. Insbesondere bleiben wegen 0.3 Teilverhältnisse unter Parallelprojektionen invariant, was eine Version des aus der Schule bekannten Strahlensatzes
dargstellt.
Parallelprojektionen sind gerade die affinen Abbildungen, die den Schnittpunkt der Geraden fest lassen:
Satz 2.10 (Charakterisierung von Parallelprojektionen). Es seien l, m ⊂ K2
zwei Geraden, die sich in einem Punkt A schneiden. Eine affine Abbildung π : l → m
ist genau dann eine Parallelprojektion, wenn π(A) = A.
Beweis.
⊔
⊓
Korollar 2.11 (Charakterisierung von affinen Abbildungen l → m). Es seien
l , m ⊂ K2 zwei verschiedene Geraden. Dann ist jede affine Abbildung F : l → m
eine Parallelprojektion oder eine Zusammensetzung von zwei Parallelprojektionen.
Beweis.
⊔
⊓
Bemerkenswerte Gerden am Dreieck im Kontext affiner Geometrie
In der euklidischen Geometrie hatten wir an einem Dreieck ABC die folgenden Geraden betrachtet: Winkelhalbierende, Mittelsenkrechte, Höhen, Seitenhalbierende. Außer für die letzteren benötigen wir für ihre Definition den
Begriff des Winkels, der allerdings nicht zur affinen Geometrie gehört. Eine
Seitenhalbierende, z.B. SC , können wir im Gegensatz dazu als Gerade durch
den Eckpunkt C und den Mittelpunkt M der gegenüberliegenden Seite AB
auch im Kontekt affiner Geometrie definieren, da wir schon gesehen hatten,
dass M durch die Eigenschaft TV(M; A, B) = −1 eindeutig festgelegt ist und
da das Teilverhältnis eine affine Invariante ist.
Da man über den reellen Zahlen M definieren kann als M = 21 (A + B) und da
der Schnittpunkt der Seitenhalbierenden dort mit der Formel S = 31 (A + B + C)
berechnet werden kann, wundert es nicht, dass für Körper der Charakteristik
2 oder 3 bzgl. der Seitenhalbierenden Besonderheiten auftreten. Beispielsweise gelten die folgenden beiden Sätze:
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 55–56
Details im Skript von
Barth S. 56
54
2 Affine Geometrie
Satz 2.12. Falls 3 = 0 ∈ K, so sind die Seitenhalbierenden in jedem Dreieck parallel.
Details im Skript von
Barth S. 56
Beweis. Einfach.
⊔
⊓
Definition 2.13. Ein Viereck ABCD heißt Parallelogramm, falls B − A = C − D
oder, äquivalent dazu, C − B = D − A.
Satz 2.14. Falls 2 , 0 ∈ K, so halbieren sich die Diagonalen im Parallelogramm
gegenseitig. Ist dagegen 2 = 0 ∈ K, so sind die beiden Diagonalen parallel.
Details im Skript von
Barth S. 56
Beweis. Einfach.
⊔
⊓
2.2 Baryzentrische Koordinaten und die Sätze von Pappos
und Desargues
10. Vorl. — 02. Jun. ’08
Baryz. K., Sätze v. Ceva, Menelaos, Pappos,
Desargues
Details im Skript von
Barth S. 57–63
Ein Dreieck im Sinne von Definition 0.17 ist nicht–entartet, d.h. die Vektoren B − A und C − A sind linear unabhängig. Gemäß Definition 2.2 heißen
dann A, B, C affin unabhängig. Wegen des Satzes 2.3 über die Koeffizienten
von unabhängigen Affinkombinationen ist dann jeder Punkt X ∈ K2 eine
Affinkombination
X = λA + µB + νC, λ + µ + ν = 1,
der Ecken und die Koeffizienten λ, µ, ν sind durch den Punkt X eindeutig
bestimmt. Daher können wir definieren:
Definition 2.15. Ist ein Dreieck ABC gegeben, so heißen die Koeffizienten (λ, µ, ν)
der eindeutigen Affinkombination
X = λA + µB + νC, λ + µ + ν = 1,
eines Punktes X ∈ K2 die baryzentrischen Koordinaten dieses Punktes.
Der Name kommt daher, dass X der Schwerpunkt (Baryzentrum) einer Konfiguration dreier Massenpunkte ist, die in den drei Ecken des Dreiecks liegen
und die Masse λ, µ, ν besitzen.
Die baryzentrischen Koordinaten haben einige Vorteile. Beispielsweise kann
man, wenn X auf einer Seite des Dreiecks ABC liegt, etwa auf BC, so ist
verschwindet eine baryzentrische Koordinate (hier: λ = 0) und X = µB + νC
ist eine Affinkombination der beiden Ecken B und C auf dieser Seite. Das
Teilverhältnis
ν
TV(X; B, C) = −
µ
kann man dann direkt ablesen. Auch im allgemeinen Fall existiert eine enge
Beziehung zwischen den baryzentrischen Koordinaten und Teilverhältnissen:
— Version vom: 16. September 2008 —
2.2 Baryzentrische Koordinaten, Sätze von Pappos und Desargues
55
Satz 2.16 (Baryzentrische Koordinaten und das Teilverhältnis). Der Punkt
X = λA + µB + νC liege auf keiner Seite des Dreiecks ABC. Dann gilt:
1. AX k BC ⇐⇒ λ = 1 ⇐⇒ µ + ν = 0.
2. Ist AX ∦ BC, so sei A′ := AX ∩ BC. Es gilt:
ν
TV(A′ ; B, C) = − .
µ
Beweis.
⊔
⊓
Details im Skript von
Barth S. 58
Eine direkte Folgerung daraus ist:
Korollar 2.17 (Satz von Ceva, 1. Version). Der Punkt X liege auf keiner Seite
des Dreiecks ABC. Die Geraden AX, BX, CX mögen die Seiten BC, CA, AB in den
Punkten A′ ∈ BC, B′ ∈ CA, C′ ∈ AB treffen. Dann gilt:
TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = −1.
µ
⊔
Beweis. TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = − µν · − λν · − λ = −1. ⊓
Wir müssen etwas mehr arbeiten, um den allgemeineren Fall und auch seine
Umkehrung zu herzuleiten:
Satz 2.18 (von Ceva). Sei ABC ein Dreieck und seien l, m, n Geraden durch die
Ecken A, B, C, die die Gegenseiten in den Punkten A′ ∈ BC, B′ ∈ CA, C′ ∈ AB
schneiden. Dann ist
TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = −1
genau dann, wenn l, m und n sich in einem Punkt treffen oder parallel sind.
Beweis. . . .
⊔
⊓
Der Satz von Ceva ist erst seit der Renaissance bekannt, obwohl es ein Gegenstück gibt, das bereits die Griechen vor mehr als 2000 Jahren kannten:
Satz 2.19 (von Menelaos). Seien ABC ein Dreieck in der affinen Ebene K2 und sei
l eine Gerade, die nicht durch eine Ecke des Dreiecks geht und die zu keiner Seite
parallel ist. l schneidet jede Dreiecksseite in einem Punkt, etwa A′ ∈ BC, B′ ∈ CA,
C′ ∈ AB. Dann gilt:
TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = 1.
(2.1)
Sind umgekehrt A′ ∈ BC, B′ ∈ CA, C′ ∈ AB drei Punkte auf den Seiten des Dreiekcs,
aber keine Eckpunkte, die die Beziehung (2.1) erfüllen, so sind sie kollinear.
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 59
56
Details im Skript von
Barth S. 60
2 Affine Geometrie
Beweis. . . .
⊔
⊓
Wie mächtig Teilverhältnisse und insbesondere der Satz von Menelaos sind,
zeigen die folgenden beiden Anwendungen auf affine Versionen klassischer
Sätze der projektiven Geometrie, nämlich die Sätze von Pappos1 und Desargues.
Satz 2.20 (von Pappos). Es seien l , m zwei Geraden in der affinen Ebene K2 , die
sich in einem Punkt O treffen. Auf diesen Geraden seien zwei Tripel A1 , A2 , A3 ∈ l
und B1 , B2 , B3 ∈ m von Punkten gegeben, die alle voneinander und auch vom Punkt
O verschieden sind. Wir betrachten die sechs Verbindungsgeraden li, j := Ai B j , i , j.
Dann sind entweder die Paare von Geraden l1,2 und l2,1 bzw. l1,3 und l3,1 bzw. l2,3
und l3,2 parallel oder die drei Punkte Pi, j := li, j ∩ l j,i , i , j, sind kollinear.
Details im Skript von
Barth S. 61
Beweis. Menelaos und Invarianz des Teilverhältnisses, allerdings muss man
wegen möglichen parallelen Geraden viele Spezialfälle betrachten.
⊔
⊓
Satz 2.21 (von Desargues). In der affinen Ebene K2 seien drei paarweise voneinander verschiedene Geraden l, m, n gegeben, die sich alle drei in einem Punkt O treffen
mögen. Auf diesen Geraden seien je zwei Punkte
A1 , A2 ∈ l, B1 , B2 ∈ m, C1 , C2 ∈ n
gewählt, die voneinander und von O verschieden seien. Diese sechs Punkte definieren
zwei Dreiecke mit den korrespondierenden Seiten
Ai Bi , Bi Ci , Ci Ai , i = 1, 2.
Dann sind entweder zwei korrespondierende Seiten parallel oder die drei Schnittpunkte PA,B , PB,C und PC,A korrespondierender Seitenpaare sind kollinear.
Details im Skript von
Barth S. 62
Beweis. Menelaos und Invarianz des Teilverhältnisses.
⊔
⊓
2.3 Ellipsen im R2
11. Vorl. — 03. Jun. ’08
Ellipsen, Kegelschnitte
im R2
Da wir speziell an der reellen Ebene interessiert sind, untersuchen wir nun
noch, welche Objekte den Kreisen der euklidischen Ebene hier in der affinen
Ebene, in der wir keinen Abstandsbegriff und damit auch keine Kreise haben,
entsprechen. Wir betrachten dazu zunächst Bilder von Kreisen, die durch
polynomielle Gleichungen gegeben sind, unter affinen Abbildungen.
1
Pappos wird auch manchmal Pappus geschrieben.
— Version vom: 16. September 2008 —
2.3 Ellipsen im R2
57
2.3.1 Bilder von Kreisen
Einige Beispiele
Sei
k : x2 + y2 = 1
der aus der euklidischen Geometrie bekannte Einheitskreis. Unter der linearen Abbildung
!
! !
!
x
a0 x
a·x
A:
7→
=
y
0b y
b·y
geht dieser in die Menge
( !
!
) ( !
x
x
x
A(k) =
∈ R2 A−1
∈k =
∈ R2
y
y
y
)
2 2
x + x = 1
a
b
über. Es ist also ein Kreis, der in x–Richtung mit den Faktor a und in y–
Richtung mit dem Faktor b gestreckt wurde. Eine solche Menge heißt achsenparallele Ellipse mit den Halbachsen a und b.
Für die lineare Abbildung
!
! !
!
x
11 x
x+y
A:
7
→
=
y
01 y
y
ist A−1 (x, y)t = (x − y, y)t und das Bild A(k) hat die Gleichung
(x − y)2 + y2 = x2 − 2xy + 2y2 = 1.
Dies ist immer noch eine Ellipse, allerdings keine achsenparallele. Wir definieren:
Definition 2.22. Eine Ellipse ist das Bild einer achsenparallelen Ellipse unter einer
Bewegung.
Doch auch unter affinen Transformationen ist das Bild einer Ellipse wieder
eine Ellipse. Für den Beweis dieser Tatsache benötigen wir ein Resultat aus
der linearen Algebra, die sogenannte Hauptachsentransformation symmetrischer Matrizen. Wir wiederholen daher kurz die wichtigsten Fakten:
Einschub: Symmetrische Matrizen
Definition 2.23. Eine Matrix A = (ai j ) ∈ Kn×n heißt symmetrisch, wenn
t
A = A, (⇔ ai j = a ji
∀ i, j).
— Version vom: 16. September 2008 —
58
2 Affine Geometrie
Eine Matrix A ∈ Cn×n heißt hermitesch, wenn
hAz, wi = hz, Awi ∀z, w ∈ Cn .
Dabei ist das hermitesche Skalarprodukt definiert durch:
hz, wi =
n
X
j=1
z j w j,
z, w ∈ Cn ,
wobei z das komplexe Konjugierte von z ∈ C bezeichnet. D.h. insbesondere: hv, λvi =
λhv, vi, aber hλv, vi = λhv, vi für λ ∈ C, v ∈ Cn .
Bemerkung 2.24. Sei A ∈ Kn×n . Einfaches Nachrechnen zeigt, dass A symmetrisch
äquivalent ist zu: ( t x t A)y = hAx, yi = hx, Ayi = ( t x)Ay ∀x, y. Jede reelle symmetrische Matrix ist daher hermitesch. Ebenso kann man nachrechnen, dass A hermitesch
äquivalent ist zu A = t Ā, was ebenso impliziert, dass jede symmetrische Matrix
hermitesch ist.
Satz 2.25. Sei A ∈ Cn×n eine reelle symmetrische oder hermitesche Matrix. Dann
hat A nur reelle Eigenwerte.
Beweis. Sei A ∈ Cn×n eine hermitesche Matrix und sei λ =t λ ein Eigenwert
von A und v ∈ Cn \ {0} ein Eigenvektor von A zu λ. Also A · v = λ · v. Dann
gilt:
λhv, vi = hv, λvi = hv, Avi = hAv, vi = hλv, vi = λhv, vi.
Dies zeigt: (λ − λ)hv, vi = 0 ⇒ λ = λ, das heißt: λ ∈ R.
⊔
⊓
Satz 2.26 (Hauptachsentransformation). Sei A ∈ Rn×n symmetrisch. Dann existiert eine orthogonale Matrix S ∈ SO(n), so dass
0
λ1
t
..
,
SAS =
.
0
λn
wobei λi die (zwingenderweise reellen) Eigenwerte der Matrix sind.
Beweis. Sei λ ∈ R ein Eigenwert und v ∈ Rn ein zugehöriger Eigenvektor mit
Länge kvk = 1. Sei W = v⊥ = {w ∈ Rn | hw, vi = 0} (s. Abb. 2.1). Wir zeigen:
Aw ∈ W ∀w ∈ W.
hAw, vi = hw, Avi
= hw, λvi
= λhw, vi
= λ·0
= 0.
(weil A symmetrisch ist)
(weil v ein Eigenvektor ist)
(Skalarprodukt)
(weil w ⊥ v )
— Version vom: 16. September 2008 —
2.3 Ellipsen im R2
59
v
w
Abbildung 2.1. Das orthogonale Komplement W = v⊥ eines Vektors v.
Dies zeigt: Aw ∈ v⊥ = W.
Wir wählen nun eine Basis von W aus zueinander senkrecht stehenden normierten Vektoren v2 , . . . , vn . Wir setzen v1 := v und S := (v1 , v2 , . . . , vn ) ∈
GL(n, R). Damit gilt: hvi , vi i = 1 ∀i, hvi , v j i = 0 ∀i , j. Wir setzen: w j := Av j ∈
W, j = 2, . . . , n. Damit ergibt sich:
λ 0 0 0
0
t
,
SAS = t S(λv1 , w2 , . . . , wn ) =
0 B
0
wobei B ∈ R(n−1)×(n−1) symmetrisch ist. Da S ∈ O(n) können wir durch Übergang von v zu −v sogar S ∈ SO(n) erreichen.
⊔
⊓
Bilder von Kreisen und Ellipsen
Satz 2.27 (Affine Bilder von Kreisen). Sei k ⊂ K2 ein Kreis und F : R2 → R2
eine affine Transformation. Dann ist das Bild F(k) des Kreises unter F eine Ellipse.
Beweis.
⊔
⊓
Da eine Hintereinanderausführung mehrerer affiner Transformationen wieder eine affine Transformation ist, folgt sofort:
Korollar 2.28 (Affine Bilder von Ellipsen). Affine Bilder von Ellipsen sind wieder
Ellipsen.
Die Eigenschaft einer Menge, eine Ellipse zu sein, ist also invariant unter
affinen Transformationen und Ellipsen sind somit — im Gegensatz beispielsweise zu Kreisen — Objekte der affinen Geometrie.
2.3.2 Erste Eigenschaften von Ellipsen
Wir haben gerade gesehen, dass Ellipsen Objekte der affinen Geometrie sind.
Wir betrachten sie daher etwas näher; insbesondere gehen wir dabei auf
Eigenschaften ein, die Ellipsen unmittelbar von Kreisen erben.
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 65
60
2 Affine Geometrie
Sekanten, Tangenten, Polaren
Da affine Abbildungen bijektiv sind, folgt für eine Ellipse E = F(k), die Bild
eines Kreises k ⊂ R2 ist, unmittelbar, dass das Bild F(k) einer Sekante von k
die Ellipse E in genau 2 Punkten schneidet. Wir nennen eine solche Gerade
Sekante der Ellipse E. Analog geht eine Tangente an k in eine Tangente an
E über. Ebenfalls wegen der Bijektivität gehen durch einen Punkt P außerhalb von E genau zwei Tangenten an E. Die Verbindungsgerade der beiden
Berührpunkte heißt Polare von P bzgl. E.
Mittelpunkt einer Ellipse
Details im Skript von
Barth S. 66
Da unter affinen Abbildungen F Paare paralleler Geraden wieder in solche
übergehen, sind die Bilder paralleler Sekanten eines Kreises k parallele Sekanten der Ellipse F(k). Damit können wir Durchmesser und Mittelpunkt
von Ellipsen definieren:
Definition 2.29. Ein Durchmesser einer Ellipse ist die Gerade der Mittelpunkte paralleler Sekanten einer Ellipse E(F(k)). Der Mittelpunkt der Ellipse ist der
Schnittpunkt zweier verschiedener Durchmesser.
Konjugierte Durchmesser einer Ellipse
Unter affinen Abbildungen gehen rechte Winkel nicht unbedingt wieder in
rechte Winkel über. Zwei senkrecht aufeinander stehende Durchmesser eines
Kreises gehen daher nicht unbedingt auf senkrecht aufeinander stehende
Durchmesser einer Ellipse über. Trotzdem geben wir diesen Bildern einen
eigenen Namen:
Definition 2.30. Zwei Durchmesser einer Ellipse E = F(k) heißen konjugiert,
wenn sie Bilder zweier senkrecht stehender Durchmesser des Kreises k sind.
Es gilt nämlich der nette Satz:
Proposition 2.31. Die beiden Tangenten an die Ellipse, in denen ein Durchmesser
die Ellipse schneidet, sind parallel zum konjugierten Durchmeser.
Beweis. Stehen beim Kreis zwei Durchmesser senkrecht aufeinander, so sind
die angesprochenen Tangenten offensichtlich parallel zum anderen Durchmesser. Da Paare paralleler Geraden wieder auf solche übergehen, folgt die
Behauptung (Abb. 2.2).
⊔
⊓
Problem:
Skizze fehlt:
fig:KreisDurchmesserEll!Ellipsen haben viele weitere schöne Eigenschaften. Zwei davon sind die soge-
nannte Gärtner–Konstruktion und die Existenz der sogenannte Brennpunkte,
die nach einer Legende schon Archimedes einsetzte, um eine gegnerische
Flotte zu verbrennen. Diese sind Gegenstand der Aufgaben 20 und 21.
— Version vom: 16. September 2008 —
2.4 Kegelschnitte im R2
61
fig:KreisDurchmesserEll
Abbildung 2.2. SKIZZE fig:KreisDurchmesserEll FEHLT!
2.4 Kegelschnitte im R2
Wir haben Ellipsen als affine Bilder von Kreisen erkannt. Die Gleichung der Ellipsen, die wir bisher gesehen haben, sind gewisse quadratische Gleichungen
in zwei Variablen x, y. Nun möchten wir allgemeiner Mengen von Punkten
studieren, die quadratische Gleichungen
q(x, y) = ax2 + 2bxy + cy2 + 2dx + 2ey + f = 0,
a, b, . . . , f ∈ R,
erfüllen. Die ungewöhnlichen Koeffizienten in der Gleichung kommen übrigens von der Matrix–Schreibweise:
a b
q(x, y) = b d
ce
c x
e y .
f 1
Da affine Transformationen nach Definition Hintereinanderausführungen
von linearen Abbildungen und Verschiebungen sind und diese jeweils die
Ordnung eines Polynoms nicht ändern, sind quadratische Polynome in zwei
Variablen auch Objekte der affinen Geometrie und bekommen daher einen
eigenen Namen:
Definition 2.32. Mengen der Form
n
o
(x, y)t ∈ K2 | ax2 + 2bxy + cy2 + 2dx + 2ey + f = 0
für gewisse a, b, . . . , f ∈ K heißen Kegelschnitte in K2 .
Unmittelbar stellen sich zwei Fragen:
• Wann ist eine reeller Kegelschnitt eine Ellipse?
• Wie sieht der reelle Kegelschnitt aus, wenn er keine Ellipse ist?
— Version vom: 16. September 2008 —
62
2 Affine Geometrie
2.4.1 Symmetrische Kegelschnitte
Zuerst betrachten wir der Einfachheit halber die Fälle mit d = e = 0, so dass
q(x, y) = ax2 + 2bxy + cy2 + f offenbar punktsymmetrisch zum Ursprung ist:
q(−x, −y) = q(x, y) für alle Punkte (x, y) ∈ R2 .
Wir können q(x, y) in Matrizenform schreiben:
!
!
!
!
ab
x
ab
x
q(x, y) = (x, y) ·
·
+ f, A :=
, X :=
.
bc
y
bc
y
Die Hauptachsentransformation liefert eine orthogonale Matrix S ∈ SO(2),
d.h. eine Drehung um den Ursprung, mit:
!
α 0 −1
Xt AX = Xt S
S X.
0β
Bis auf diese Drehung ist
q(x, y) = αx2 + βy2 + f = 0.
Um zu klären, wie diese Kegelschnitte aussehen, müssen wir viele Fälle
unterscheiden. Um deren Anzahl zu reduzieren, bemerken wir zunächst,
dass wir Vertauschungen von x und y nicht beachten müssen, da die Drehung (x, y) 7→ (y, −x) die x– und die y–Achse vertauscht. Ebenso können wir annehmen, dass f = 0 oder f = −1 gilt, da, falls f , 0, gilt:
q(x, y) = 0 ⇐⇒ − 1f q(x, y) = 0. Der Übersichtlichkeit halber nehmen wir
schließlich noch α, β ≥ 0 an und schreiben negative Werte explizit in Form
Normalform definie- von Vorzeichen in die Gleichung. Dann ergibt sich die Tabelle 2.1:
ren!
2.4.2 Der allgemeine Fall
Sind nun d und e nicht beide gleich 0, so schreiben wir
!
ab
q(x, y) = XQX + 2hU, Xi + f, X = (x, y), Q =
, U = (d, e)
bc
t
und versuchen, den linearen Anteil durch eine Translation X 7→ X′ = T + X
zu beseitigen. Schaffen wir dies, so hat q(x, y) die spezielle Form q(x, y) =
ax2 + 2bxy + cy2 + f , die wir bereits im vorigen Abschnitt untersucht haben.
Wir berechnen daher:
q(X′ ) = (X′ − T)Q(X′ − T)t + 2hU, X′ − Ti + f
= X′ QX′t + 2hU − QT, X′ i + f + TQTt .
Falls also ein T existiert mit QT = U, so können wir durch die Verschiebung
den linearen Teil tatsächlich entfernen und sind in einem der uns bereits
bekannten Fälle gelandet, da f + TQTt nicht von X abhängt. Es gibt nun die
folgenden drei Fälle:
— Version vom: 16. September 2008 —
2.4 Kegelschnitte im R2
f
Normalform
A
63
Nullstellenmenge
0
0
0=0
ganz R2
0
Rang 1
x2 = 0
(doppelte) Gerade
ein Punkt
0 positiv oder negativ definit αx2 + βy2 = 0
0
indefinit, Rang 2
αx2 − βy2 = 0 2 sich schneidende Geraden
−1
0
0=1
ganz R2
2
−1
Rang 1
αx = 1
2 parallele Geraden
−1
Rang 1
−αx2 = 1
∅ (die leere Menge)
−1
positiv definit
αx2 + βy2 = 1
eine Ellipse
negativ definit
−αx2 − βy2 = 1
∅ (die leere Menge)
−1
−1
indefinit, Rang 2
αx2 − βy2 = 1
eine Hyperbel
Tabelle 2.1. Klassifikation der Kegelschnitte der Form q(x, y) = Xt AX + f , d.h. solche
Kegelschnitte ax2 + 2bxy + cy2 + 2dx + 2ey + f = 0 mit d = e = 0. Eine Tabelle für den
allgemeinen Fall liefert der Abschnitt 2.4.3 über Quadriken im Rn , wenn man n = 2
wählt.
1. Rg Q = 2, d.h. Q ist invertierbar. Dann wählen wir T = Q−1 U und haben
das Problem auf den bereits studierten Spezialfall reduziert.
2. Rg Q = 0, d.h. q(x, y) hat keinen quadratischen Anteil und ist daher entweder linear oder konstant und somit leicht zu klassifizieren.
3. Rg Q = 1. Wieder mit der Hauptachsentransformation existiert eine Drehung, so dass wir annehmen können, dass
XQXt = αx2 , α , 0.
Durchmultiplizieren mit
q(x, y) auf die Form:
1
α
und Umbenennen der Koeffizienten bringt
q(x, y) = x2 + 2dx + 2ey + f.
Die quadratische Ergänzung x′ = x + d liefert:
q(x′ , y) = (x′ )2 + 2ey + f ′ mit f ′ = f − d2 .
Hier bleiben schließlich zwei Fälle zu unterscheiden:
a) e = 0. Dann folgt: (x′ )2 = − f ′ . Dieser Kegelschnitt ist entweder die
leere Menge oder besteht aus zwei parallelen Geraden.
b) e , 0. Dann können wir mit 1e durchmultiplizieren und erhalten nach
Umbenennen der Koeffizienten:
y = αx2 + β.
Das ist bekannterweise (z.B. aus der Analysis) eine Parabel.
Insgesamt haben wir gezeigt:
— Version vom: 16. September 2008 —
64
2 Affine Geometrie
Satz 2.33 (Klassifikation der Kegelschnitte im R2 ). Es sei
q(x, y) = ax2 + 2bxy + cy2 + 2dx + 2ey + f,
a, b, . . . , f ∈ R,
die Gleichung eines Kegelschnittes in der reellen Ebene R2 . Durch eine Bewegung
ϕ : R2 → R2 kann die Gleichung in eine der oben erwähnten Gleichungen oder eine
der drei folgenden Gleichungen transformiert werden:
x2
a2
+
• Hyperbel mit Halbachsen a, b:
x2
a2
• Ellipse mit Halbachsen a, b:
• Parabel:
2
x
a2
y2
b2
−
= 1.
y2
b2
= 1.
= y.
Kegelschnitte, die auf die obige Hyperbelform gebracht werden können, heißen Hyperbel, solche, die auf die Parabelform gebracht werden könne, Parabel.
Allgemeiner heißen solche Kegelschnitte, die auf eine dieser drei Formen gebracht
werden können, glatt oder nicht–entartet, die anderen singulär oder entartet.
Bemerkung 2.34. Der oben ausgeführte Beweis für den Klassifikationssatz liefert
sogar einen Algorithmus, um einen mit seiner Gleichung gegebenen Kegelschnitt
zu klassifizieren. Da wir dies hier nicht vertiefen möchten, verweisen wir nur auf
die reichlich verfügbare Literatur über lineare Algebra. Außerdem wird dieser Algorithmus ausführlich im frei verfügbaren Skript [Sch06] auch anhand von Beispielen
beschrieben.
Kegelschnitte haben ihren Namen daher, dass man sie als Schnitte eines
Kreiskegels im R3 mit Ebenen erhalten kann; siehe Abbildung 2.3 für die drei
nicht–entarteten Fälle.
Abbildung 2.3. Nichtentartete affine Kegelschnitte als Schnitte eines Kreiskegels mit
einer Ebene: Ellipse, Hyperbel und Parabel.
— Version vom: 16. September 2008 —
2.4 Kegelschnitte im R2
65
2.4.3 Quadriken im Rn
2
Den Beweis für den Klassifikationssatz der Kegelschnitte im R kann man
analog auch in n Dimensionen, also für Nullstellenmengen von Polynomen
vom Grad 2 in n Variablen durchführen. Solche Mengen heißen Quadriken
im Rn . Wir geben hier die Klassifikation nur kurz an, ohne den Beweis in
aller Ausführlichkeit zu führen.
Definition 2.35. Eine Quadrik Q ⊆ Rn ist die Lösungsmenge einer quadratischen
Gleichung in n Variablen x1 , . . . , xn :
q(x) =
n
X
ai j x i x j +
i, j=1
In Matrixschreibweise:
n
X
i=1
bi xi + c = 0, ai j , bi , c ∈ R.
q(x) = t xAx + t b · x + c
wobei A = (ai j ) ∈ Rn×n symmetrisch gewählt sei.
Die Matrix
c
b1
2
à = .
..
b
n
2
. . . b2n
a11 . . . a1n
.. .. ..
. . .
an1 . . . ann
b1
2
heißt erweiterte Matrix von q. Damit gilt dann:
1
x
1
q(x) = (1, x1 , . . . , xn ) · Ã · . .
..
xn
Satz 2.36 (Klassifikation von Quadriken). Sei q(x) = t xAx + t bx + c ein
quadratisches Polynom. Ã die erweiterte Matrix. Dann gibt es eine Bewegung
f : Rn → Rn
f (y) = Sy + t, S ∈ SO(n), t ∈ Rn ,
so dass q( f (y)) = 0 zu einer der folgenden Gleichungen äquivalent ist, wobei wir
schreiben: m = rang A, m̃ = rang Ã, k = Anzahl der positiven Eigenwerte von A:
(a) (m̃ = m)
y21
α21
(b) (m̃ = m + 1)
y21
α21
+...+
+...+
y2k
α2k
y2k
α2k
−
−
y2k+1
α2k+1
y2k+1
α2k+1
−...−
−...−
y2m
α2m
y2m
α2m
= 0,
= 1,
— Version vom: 16. September 2008 —
12. Vorl. — 05. Juni ’08
Quadriken im Rn ,
Aff. Geom. und DGS,
P2 (R)
66
2 Affine Geometrie
(c) (m̃ = m + 2)
y21
α21
+...+
y2k
α2k
−
y2k+1
α2k+1
−...−
y2m
α2m
= ym+1 .
Hierbei sind α1 , . . . , αm ∈ R>0 Konstanten und 0 ≤ k ≤ m.
Beweis. Nach dem Satz 2.26 über die Hauptachsentransformation ∃S ∈ SO(n),
so dass
0
λ1
t
..
= D
SAS =
.
0
λn
Ist k die Anzahl der positiven Eigenwerte, m = rang A, dann können wir ohne
Beschränkung der Allgemeinheit (o.B.d.A.) annehmen, dass
1
α2
1
.
..
A =
1
α2k
− α21
k+1
..
.
− α12
n
.
Die Einführung neuer Koordinaten x = Sy und eine Translation erhält man
schließlich die Behauptung; siehe [Sch06, S. 124f] für Details.
⊔
⊓
Die oben bereits angegebene Klassifikation der Kegelschnitte im R2 können
wir hieraus leicht reproduzieren. Wir gehen dazu alle möglichen Fälle der
Werte m, m̃, k durch. Da n = 2, gilt offenbar m = rang(A) ≤ 2 und m̃ ≤ 3. Wir
geben dabei nicht nur die Normalform, sondern alle Formen für mögliche αi
an, wobei wir statt α := α1 und β = α2 setzen:
m = m̃ = 2, k = 2: Ein Punkt:
y
x2
α2
+
y2
β2
=0
m = m̃ = 2, k = 1: Zwei Geraden mit Steigungen α1 , β1 :
— Version vom: 16. September 2008 —
x
2.4 Kegelschnitte im R2
67
y
0=
x2
α2
−
y2
β2
=
x
α
+
y
β
x
α
−
y
β
β
1
1
x
α
m = 2, m̃ = 3, k = 2: Eine Ellipse mit Halbachsen der Längen α, β:
y
β
x2
α2
+
y2
β2
=1
α
x
m = 2, m̃ = 3, k = 1: Eine Hyperbel mit Halbachsen der Längen α, β:
y
β
x2
α2
−
y2
β2
=1
x
α
Die folgende Abbildung zeigt Ellipse und Hyperbel mit den gleichen
Halbachsen in einem Bild, um deren Zusammenhang deutlich zu machen:
y
β
β
2
x
α2
±
y2
β2
=1
α
— Version vom: 16. September 2008 —
x
68
2 Affine Geometrie
m = 2, m̃ = 3, k = 0:
2
− αx 2 −
y2
β2
=1
die leere Menge: ∅
m = 1, m̃ = 3, k = 1: Eine Parabel:
y
1
x2
α2
=y
α
x
m = 1, m̃ = 2, k = 1: Zwei Geraden mit Abstand 2α:
y
x2
α2
= 1 (⇔ ( αx + 1)( αx − 1) = 0)
α
x
m = 1 = m̃, k = 1: Eine doppelte Gerade:
y
x2
α2
=0
x
m = 1, m̃ = 2, k = 0:
2
− αx 2 = 1 : ∅
die leere Menge: ∅
2.5 Affine Geometrie und Dynamische Geometrie Software
Problem:
Bsp. zum Problem
DGS bei affiner
Geom. noch
ausführen!
. . . Problem bei Konstruktionen beim Auftreten von Schnittpunkten, die ins
∞ Ferne wandern. . . ein Beispiel.
— Version vom: 16. September 2008 —
3
Projektive Geometrie
Wie schon in der Einleitung erwähnt, ist die projektive Geometrie die Formalisierung der Ideen der aus der Malerei bekannten Perspektive, bei der sich
zwei parallel verlaufende Geraden in einem virtuellen Punkte, dem Fluchtpunkt treffen. Wir werden sehen, dass die projektive Geometrie allerdings
noch wesentlich mehr ist als nur diese Übersetzung der Perspektive aus der
Malerei in die Geometrie; vielmehr wird sich zeigen, dass die projektive Geometrie eine in vielerlei Hinsicht nahezu perfekte innere Schönheit aufweist.
3.1 Die reelle projektive Ebene P2 (R)
Bevor wir formell und allgemein den projektiven n–dimensionalen Raum
Pn (K) über einem Körper K einführen, geben wir hier anschauliche Einführung in die Phänomene und Objekte des uns am meisten interessierenden
Falles der reellen projektiven Ebene.
Beginnen wir mit der Idee aus der Malerei: Die parallelen Seiten einer geraden Straße treffen sich am Horizont in einem virtuellen Punkt, der nicht
existent, also nicht Teil der Ebene ist. Die Seiten einer anderen, nicht parallelen geraden Straße treffen sich in einem anderen virtuellen Punkt. Die
projektive Geometrie ist eine Formalisierung dieser Grundidee.
Problem:
Skizze fehlt:
Wir setzen: Die projektive reelle Ebene P2 (R) ist die Menge aller Ursprungsfig:zweiStrassen!
geraden im R3 . . . .
Details im Skript von
Barth S. 74–77
3.2 Der projektive Raum Pn (K)
2
Im vorigen Abschnitt haben wir die reelle projektive Ebene P (R) als Menge
der Ursprungsgeraden im R3 definiert. Dabei hatten wir die Ebene R2 in den
13. Vorl. — 09. Juni ’08
Definition des Pn (K),
proj. UR, Koordinaten,
Beispiele
70
3 Projektive Geometrie
fig:zweiStrassen
Abbildung 3.1. SKIZZE fig:zweiStrassen FEHLT!
P2 (R) eingebettet, indem wir die baryzentrischen Koordinaten (x, y, z) mit
x + y + z = 1 für Punkte der affinen Ebene R2 verwendet hatten und die
Bedingung x + y + z = 1 als Gleichung einer Ebene im R3 interpretiert hatten.
Häufig ist zum Arbeiten aber eine andere Einbettung1 des R2 in die projektive
Ebene P2 (R) praktischer, nämlich die Abbildung (s. Abb. 3.2):
σ : R2 → P2 (R),
Problem:
Skizze fehlt:
fig:HinftyStd!
(X1 , X2 ) 7→ (1 : X1 : X2 ).
Vermöge dieser injektiven Abbildung können wir R2 als Teilmenge des P2 (R)
auffassen; wir nennen σ die Standard–Einbettung von R2 in P2 (R). Das Bild
σ(R2 ) besteht dann genau aus allen Ursprungsgeraden, die durch Punkte
der Form (1, x1 , x2 ), also Punkten in der Ebene {X ∈ R3 | X0 = 1}, aufgespannt werden. Die einzigen Ursprungsgeraden, die nicht im Bild von σ
erscheinen, sind jene der Form (0 : x1 : x2 ); dies sind die sogenannte unendlich fernen Punkte bzgl. der Einbettung σ. Sie liegen in der unendlich
fernen Ebene H∞ := {X ∈ P2 (R) | X0 = 0}. Eine Ursprungsgerade l ⊂ H∞ ,
die also einen Richtungsvektor V := (0, V1 , . . . , Vn ) mit verschwindender 0–
ter Koordinate besitzt, definiert eine Richtung in der affinen Hyperebene
H1 := {X ∈ Kn+1 | X0 = 1}. Alle dortigen Geraden mit Richtungsvektor V
sind parallel zueinander und zu l und daher ist der zu l gehörige projektive
Punkt in Pn (K) der unendlich ferne Punkt, in dem sich alle diese parallelen
Geraden treffen.
Beispiel 3.1. Wir hätten natürlich jede andere Einbettung verwenden können,
die obige ist nur eine besonders einfache. Wählen wir beispielsweise die
Ebene x1 + 2x2 + 3x3 = 1, so folgt x3 = 31 (1 − x1 − 2x2 ), also:
(x1 , x2 ) 7→ (x1 : x2 :
1
(1 − x1 − 2x2 )).
3
Damit lässt sich in den meisten Fällen nicht ganz so angenehm arbeiten wir
mit der Standard–Einbettung σ.
⊔
⊓
1
d.h. injektive Abbildung
— Version vom: 16. September 2008 —
3.2 Der projektive Raum Pn (K)
71
fig:HinftyStd
Abbildung 3.2. SKIZZE fig:HinftyStd FEHLT!
3.2.1 Definition des projektiven Raumes
In n Dimensionen gehen wir ganz ähnlich vor wie in der Ebene:
Definition 3.2. Die Menge
Pn (K) := { Ursprungsgeraden im Kn+1 }
heißt projektiver n-dimensionaler Raum über K. Ein Punkt X ∈ Pn (K) hat die
Koordinaten
X = (X0 : X1 : · · · : Xn ) := Ursprungsgerade im Kn+1 durch (X0 , X1 , . . . , Xn ).
Für den zugehörigen Vektor (X0 , X1 , . . . , Xn ) ∈ Kn+1 schreiben wir:
X̂ = (X0 , X1 , . . . , Xn ).
Da λ(X0 , . . . , Xn ) die gleiche Ursprungsgerade aufspannt für alle 0 , λ ∈ K, gilt:
(X0 : X1 : · · · : Xn ) = (λX0 : λX1 : · · · : λXn ) ∀λ , 0.
Genau wie bei der projektiven Ebene ist hier natürlich zu beachten, dass
(0 : 0 : · · · : 0) kein projektiver Punkt ist, weil der Vektor (0, 0, . . . , 0) ∈ Kn+1
keine Ursprungsgerade aufspannt.
Ist der affine Raum Kn gegeben, so sind bzgl. der Standard–Einbettung
σ : Kn → Pn (K),
(X1 , . . . , Xn ) 7→ (1 : X1 : · · · : Xn )
die unendlich fernen Punkte gerade jene der Form (0 : X1 : · · · : Xn ). Diese
bilden die Menge
H∞ := {X ∈ Pn (K) | X0 = 0},
die sogenannte unendlich ferne Hyperebene.
Umgekehrt gilt für jeden Punkt X ∈ Pn (K)\H∞ , dass X0 , 0, so dass die
Abbildung
— Version vom: 16. September 2008 —
72
3 Projektive Geometrie
Pn (K)\H∞ → Kn ,
(X0 : X1 : · · · : Xn ) 7→
X1
X0
,...,
Xn X0
definiert ist.
Um projektive Objekte ein wenig zu verstehen, kann man ihr Bild unter dieser
Abbildung verwenden. Man bezeichnet dieses als affine Standard–Ansicht
oder affine Standard–Karte von Pn (K). Allerdings vergisst man dabei die
Punkte auf der unendlich fernen Hyperebene. In Kürze kommen wir zu
Möglichkeiten, dieses Problem zu vermeiden.
3.2.2 Veranschaulichungen projektiver Räume
Wir betrachten zunächst den Fall K = R und versuchen, uns Pn (R) für n =
1, 2 zu veranschaulichen. Dazu fragen wir uns aber zunächst für allgemeine
Körper K, was die unendlich fernen Punkte von P1 (K) sind: Welche Punkte
(x1 , x2 ) ∈ P1 (K) sind nicht im Bild der Einbettung
σ : K → P1 (K),
x 7→ (1 : x)
enthalten? Ist x1 , 0, so gilt (x1 : x2 ) = (1 : xx12 ). Die einzigen Punkte, die nicht
im Bild von σ enthalten sind, sind also jene der Form (0 : x2 ). Da x2 , 0 ist,
weil (0 : 0) kein Punkt von P1 (K) ist, ist (0 : x2 ) = (0 : 1). Dies ist also der
einzige unendlich ferne Punkt, notiert ∞ := (0 : 1). Dies ist die (vertikale)
Ursprungsgerade im K2 mit Richtungsvektor (0, 1).
Beispiel 3.3 (Veranschaulichung von P1 (R)). Nach Definition ist
P1 (R) = { Ursprungsgeraden im R2 }.
Wir geben verschiedene Möglichkeiten, sich dies zu veranschaulichen. Jede
dieser Möglichkeiten visualisiert eine der Eigenschaften der reellen projektiven Geraden besser, andere schlechter. Alle haben gemein, dass Punkte, die ja
0–dimensionalen Objekte sind, auch tatsächlich als 0–dimensionale Objekte,
also Punkte, visualisiert werden; allerdings in manchen Fällen als Paar von
zwei Punkten:
Problem:
Skizze fehlt:
fig:Rinfty!
1. Jede Ursprungsgerade hat eine Steigung m ∈ R ∪ {∞} und ist dadurch
auch schon festgelegt. Es gibt also eine Bijektion (Abb. 3.3):
P1 (R) → R ∪ {∞}.
2. Jede der Ursprungsgeraden trifft den Einheitskreis S1 in genau 2 gegenüber liegenden Punkten, von denen jeder die Ursprungsgerade schon
eindeutig festlegt. Bezeichnen wir also mit ˜ die Äquivalenzrelation, die
— Version vom: 16. September 2008 —
3.2 Der projektive Raum Pn (K)
73
fig:Rinfty
Abbildung 3.3. SKIZZE fig:Rinfty FEHLT!
gegenüberliegende Punkte des Einheitskreises als äquivalent ansieht, so
ist die Abbildung
S1 / ˜ → P1 (R),
V/ ˜ 7→ {λ · V | λ ∈ R}
eine Bijektion, vermöge der wir P1 (R) als Einheitskreis ansehen können,
bei dem gegenüberliegende Punkte identifiziert werden (Abb. 3.4).
Problem:
Skizze fehlt: fig:P1S1!
fig:P1S1
Abbildung 3.4. SKIZZE fig:P1S1 FEHLT!
3. Die Menge R ∪ {∞} können wir uns auch mit Hilfe der stereographischen
Projektion veranschaulichen (Abb. 3.5).
⊔
⊓
Problem:
Skizze fehlt:
fig:stereoGraphR1!
In ähnlicher Weise können wir die komplexe projektive Gerade visualisieren.
Insbesodere die stereographische Projektion ist recht intuitiv zu begreifen:
Beispiel 3.4 (Veranschaulichung von P1 (C)). Wie wir gesehen haben, hat
P1 (C) auch nur einen unendlich fernen Punkt ∞ = (0 : 1). Die projektive
komplexe Ebene können wir vermöge der stereographischen Projektion als
sogenannte Riemannsche Zahlenkugel versehen (Abb. 3.6).
⊔
⊓
— Version vom: 16. September 2008 —
Problem:
Skizze fehlt: fig:P1C1!
74
3 Projektive Geometrie
fig:stereoGraphR1
Abbildung 3.5. SKIZZE fig:stereoGraphR1 FEHLT!
fig:P1C1
Abbildung 3.6. SKIZZE fig:P1C1 FEHLT!
——
ab hier nicht im Barth–Skript
Nun zuletzt noch zu einer weiteren Visualisierungsmöglichkeit der uns am
meisten interessierenden reellen projektiven Ebene:
Beispiel 3.5 (Sphärische Ansicht des P2 (R)). Nach Definition können wir
uns die Punkte der reellen projektiven Ebene natürlich als Ursprungsebenen
im R3 veranschaulichen. Doch wir können auch diese so visualisieren, dass
ein projektiver Punkt durch ein Paar von Punkten dargestellt wird. Dazu
betrachten wir, analog zum Fall P1 (R), die Schnittpunkte der Ursprungsgeraden im R3 mit der Einheitssphäre S2 .
bis hier nicht im Barth–Skript
——
Die projektiven Geraden, die ja Ursprungsebenen im R3 sind, schneiden die
Einheitssphäre in Großkreisen, d.h. Kreisen um den Ursprung vom Radius
1. In dieser sogenannten sphärischen Ansicht entsprechen also Großkreise
den projektiven Geraden, wobei gegenüberliegende Punkte auf diesen Großkreisen den gleichen projektiven Punkt definieren. Diese Veranschaulichung
kann man beispielsweise bei C einschalten.
⊔
⊓
3.2.3 Axiome für projektive Ebenen
——
ab hier nicht im Barth–Skript
Analog zur axiomatischen Definition affiner Ebenen in Abschnitt 2.1.2 kann
man auch für projektive Ebenen statt unseres Zugangs jenen über die Angabe geometrischer Axiome wählen. Dabei muss freilich das Parallelenaxiom
— Version vom: 16. September 2008 —
3.2 Der projektive Raum Pn (K)
75
durch eines ersetzt werden, dass die Existenz eines Schnittpunkts zweier
Geraden garantiert:
Definition 3.6. Eine projektive Ebene P ist eine Menge, deren Elemente wir Punkte nennen, gemeinsam mit einer Menge von Untermengen, genannt Geraden, die
die folgenden Axiome erfüllen:
P1 Zwei verschiedene Punkte P, Q ∈ P liegen auf genau einer Geraden.
P2 Zwei verschiedene Geraden treffen sich in genau einem Punkt.
P3 Es gibt drei nicht kollineare Punkte.
P4 Jede Gerade enthält wenigstens drei Punkte.
Zwei Projektive Ebenen P und P′ sind isomorph (in Zeichen: P P′ ), falls es eine
bijektive Abbildung T : P → P′ gibt, die kollineare Punkte auf kollineare Punkte
abbildet. T heißt dann Isomorphismus (und Automorphismus, falls P = P′ ).
Beispiel 3.7. Die projektiven Ebenen P2 (K) sind Beispiele für projektive Ebenen in diesem Sinn.
⊔
⊓
Beispiel 3.8. Versuchen wir, die kleinste projektive Ebene gemäß der Axiome
zu produzieren, so können wir mit drei Punkte 1, 2, 3 beginnen (s. Abb. 3.7)
und nach und nach Punkte geschickt hinzufügen, bis alle Axiome erfüllt
sind. Man sieht schnell, dass wenigstens 7 Punkte nötig sind, analog zur
Übungsaufgabe 17: Die Menge P ist also {1, 2, . . . , 7} und die Geraden sind
die Teilmengen {1, 2, 4}, . . . , {4, 5, 6}, die in der Matrix in Abb. 3.7 angegeben
sind.
1 2 3 4 5 6 7
3
6
5
7
1
4
2
124
136
235
157
347
267
456
Abbildung 3.7. Eine Projektive Ebene mit 7 Punkten.
Es fällt dabei auf, dass es hier genauso viele Geraden wie Punkte gibt und
dass es sogar möglich ist, das Bild (in dem die Strecken ein Versuch sind, die
aus drei Punkten bestehenden Teilmengen, die Geraden genannt werden, zu
visualisieren) und die Inzidenzmatrix symmetrisch zu wählen. Dies ist kein
Zufall; wir werden sehen, dass zwischen projektiven Punkten und Geraden
einer projektiven Ebene eine sehr enge Beziehung herrscht.
⊔
⊓
— Version vom: 16. September 2008 —
bis hier nicht im Barth–Skript
——
76
3 Projektive Geometrie
Beispiel 3.9. Die Menge S2 / ˜, bei der ˜ wieder zwei gegenüberliegende Punkte identifiziert (siehe Beispiel 3.5 zur sphärischen Ansicht des P2 (R)), wird zu
einer projektiven Ebene im obigen Sinn, wenn wir die Großkreise als Geraden
nehmen. Außerdem ist die Abbildung
ϕ : S2 / ˜ → P2 (R),
die auf einem Repräsentanten V ∈ S2 definiert ist als ϕ(V) = OV, ein Isomorphismus von projektiven Ebenen im obigen Sinn. Hierbei beschreibt OV wie
üblich die Gerade durch O und V, wobei O der Ursprung des R3 und daher
OV die von V aufgespannte Ursprungsgerade ist. Großkreise werden dabei
natürlich auf die projektive Gerade im P2 (R), also Ursprungsebene im R3 ,
abgebildet, die diesen Großkreis aus der Sphäre S2 ausschneidet.
⊔
⊓
3.2.4 Projektive Unterräume
Genau wie in der linearen Algebra und der affinen Geometrie möchten wir
auch projektive Unterräume definieren. Wir haben ja schon gesehen, dass
projektive Punkte im Pn (K) Ursprungsgeraden, also 1–dimensionale Untervektorräume im Kn+1 und dass projektive Geraden im Pn (K) Ursprungsebenen, also 2–dimensionale Untervektorräume im Kn+1 sind. Dies können wir
direkt verallgemeinern:
Definition 3.10. Ein projektiver Unterraum U ⊂ Pn (K) ist eine Menge von Ursprungsgeraden l ⊂ Kn+1 , so dass es einen Untervektorraum Û gibt mit U = {l ⊂ Û}.
Wir setzen dim(U) := dim(Û) − 1.
Beispiel/Definition 3.11. 1. Jede Ursprungsgerade l ⊂ Kn+1 repräsentiert
einen projektiven Punkt X ∈ PK . Projektive Punkte sind also 0–
dimensionale projektive Unterräume.
P
2. Eine nicht–triviale
Linearform ni=0 ai xi definiert eine Hyperebene Ĥ =
P
{x̂ ∈ Kn+1 | ni=0 ai xi = 0} ⊂ Kn+1 . Die in Ĥ liegenden Ursprungsgeraden
bilden einen projektiven Raum der Dimension n − 1 im Pn (K):
H = {x ∈ Pn (K) |
n
X
ai xi = 0}
i=0
Dieser projektive Unterraum heißt projektive Hyperebene. Die projektive Hyperebene H∞ = {x0 = 0} heißt unendlich ferne Hyperebene
bzgl.
Pn
n
der Standard–Einbettung.
Da
offenbar
H
=
{x
∈
P
(K)
|
a
x
=
0} =
i
i
i=0
P
P
{x ∈ Pn (K) | λ · ni=0 ai xi = 0} = {x ∈ Pn (K) | ni=0 (λ · ai )xi = 0}, wie bei
projektiven Punkten, führen wir auch für Hyperebenen die Notation
H = (a0 : · · · : an )
— Version vom: 16. September 2008 —
3.2 Der projektive Raum Pn (K)
77
ein. Wir werden sehen, dass diese Analogie zu Punkten noch wesentlich
stärker ist als man auf den ersten Blick erkennen kann.
⊔
⊓
Bemerkung 3.12. Offenbar sind projektive Unterräume der Dimension d des Pn (K)
gerade (d + 1)–dimensionale Untervektorräume im Kn+1 .
Projektiver Abschluss
Genau wie wir zu jeder affinen Geraden einen projektiven Punkt im unendlichen hinzugefügt haben, können wir allgemeiner jeden affinen Unterraum
zu einem projektiven Unterraum fortsetzen:
Satz 3.13 (Projektiver Abschluss affiner Unterräume). Jeder affine Unterraum
A ⊂ Kn ist fortsetzbar zu einem projektiven Unterraum A ⊂ Pn (K) mit dim A =
dim A vermöge der Standard–Einbettung σ : Kn → Pn (K), so dass gilt:
A ∩ σ(Kn ) = σ(A).
Beweis.
⊔
⊓
Bemerkung 3.14. Identifiziert man σ(A) mit A und σ(Kn ) mit Kn , so kann man
die letzte Gleichung aus dem Satz auch schreiben als: A ∩ Kn = A.
Bemerkung/Definition 3.15. Der projektive Abschluss lässt sich erweitern auf
Nullstellenmengen von Polyomen höheren Grades. Hier geben wir nur das Beispiel
der Kegelschnitte an: Ist
f (x, y) = ax2 + 2bxy + cy2 + 2dx + 2ey + f
ein Kegelschnitt und K := { (x, y) ∈ R2 | f (x, y) = 0 }, so setzen wir:
f (t, x, y) := ax2 + 2bxy + cy2 + 2dxt + 2eyt + f t2 .
Dann besitzt also jedes Monom Grad 2 und es folgt:
f (x, y) = 0 ⇐⇒ f (1, x, y) = 0.
Das Polynom f ist also homogen und wir nennen die zusätzliche Variable t daher
homogenisierende Variable.
Außerdem besteht K := {(t, x, y)R3 | f (t, x, y) = 0} nur aus Ursprungsgeraden, d.h.
ist P = (t, x, y) ∈ K ein Punkt von K, so ist auch jeder Punkt λP ein Punkt von K,
denn:
f (λt, λx, λy) = λ2 · f (t, x, y) = 0.
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 80
78
3 Projektive Geometrie
K ist also ein sinnvolles projektives Objekt, in dem Sinn, dass es aus projektiven
Punkten besteht. Fassen wir dementsprechend K im P2 (R) auf, so heißt K projektiver
Abschluss des Kegelschnittes K. Wie wir gesehen haben, setzt K den affinen Kegelschnitt fort bzgl. der Standard–Einbettung σ : R2 → P2 (R), (x, y) 7→ (1 : x : y):
σ({ f (x, y) = 0}) = { f (1, x, y) = 0} = { f (t, x, y) = 0} ∩ {t = 1} ⊂ P2 (R).
Aufspannen projektiver Unterräume
14. Vorl. — 10. Juni ’08
Proj. UR, Abb., Axiome proj. Eb., Aff. Ansichten
Genauso wie wir für Untervektorräume U, V ⊂ Kn die Summe definieren
können, ist dies für projektive Unterräume möglich:
Definition 3.16. Sei M ⊂ Pn (K) eine Menge. Dann setzen wir:
\
span(M) :=
U.
U projektiver Unterraum mit M⊂U
Details im Skript von
Barth S. 81
. . . Wir setzen weiter für projektive Unterräume U1 , U2 ⊂ Pn (K):
Details im Skript von
Barth S. 81
Bemerkung 3.17 (Andere Definition von span(M)). . . .
U1 + U2 := span(U1 ∪ U2 ).
Beispiel 3.18. Seien X , Y ∈ Pn (K) zwei projektive Punkte. Dann ist l :=
span({X, Y} die projektive Gerade durch X und Y. . . .
⊓
⊔
Satz 3.19 (Dimensionsformel). Sind U1 , U2 ⊂ Pn (K) projektive Unterräume, so
gilt:
dim U1 + dim U2 = dim(U1 + U2 ) + dim(U1 ∩ U2 ).
Dabei setzen wir: ∅ˆ := {(0, . . . , 0)} und dim(∅) := −1.
Beweis. Dies folgt direkt aus der Dimensionsformel für Vektorräume.
⊔
⊓
Beispiel 3.20. Sind l1 , l2 ∈ P2 (K) zwei verschiedene Geraden, so folgt
dim(l1 ∩ l2 ) = dim(l1 ) + dim(l2 ) − dim(l1 + l2 ) = 1 + 1 − 2 = 0.
Dies liefert einen weiteren Beweis dafür, dass sich zwei Geraden im P2 (K)
immer in genau einem Punkt schneiden.
⊔
⊓
— Version vom: 16. September 2008 —
3.2 Der projektive Raum Pn (K)
79
3.2.5 Projektive Abbildungen
Definition 3.21. Eine projektive Abbildung oder Projektivität P : Pn (K) →
Pn (K) ist eine Abbildung, die auf den homogenen Koordinaten durch Multiplikatoin
mit einer invertierbaren Matrix definiert ist:
X 7→ X̂ 7→ M · X̂ = (P0 , . . . , Pn ) 7→ (P0 : . . . : Pn ) =: P(X).
Man muss dabei zeigen, dass diese Definition unabhängig vom gewählten Vektor ist,
der die Ursprungsgerade X aufspannt.
Bemerkung 3.22. Jede projektive Abbildung ist bijektiv und bildet projektive Unterräume der Dimemsion d auf projektive Unterräume der Dimension d ab, weil dies
für die zugehörigen Vektorräume unter invertierbaren linearen Abbildungen gilt.
Satz 3.23 (Projektive Fortsetzung affiner Transformationen). Jede affine Transformation F : Kn → Kn lässt sich zu einer projektiven Transformation P : Pn (K) →
Pn (K) fortsetzen.
Beweis. . . .
⊔
⊓
Definition 3.24. Die Menge
PGL(n, K) := {ϕ : Pn (K) → Pn (K) | ϕ ist projektive Transformation }
heißt projektive Gruppe.
Beispiel 3.25. PGL(1, K)
⊔
⊓
3.2.6 Affine Ansicht projektiver Objekte
Im Abschnitt 3.2.2 haben wir versucht, uns projektive Räume möglichst vollständig — d.h. insbesondere inklusive der unendlich fernen Punkte — zu
veranschaulichen. Da wir aber aus jahrelanger Erfahrung mit der reellen affinen Ebene R2 besonders viel Erfahrung gesammelt haben, mag es auch
nicht schaden, Objekte der projektiven reellen Ebene im R2 mit den üblichen
Geraden zu visualisieren. Zwangsläufig müssen dabei einige Punkte wegfallen, da wir ja beim Übergang vom R2 zum P2 (R) unendlich ferne Punkte
hinzugefügt hatten.
Für den Übergang von der affinen Ebene K2 zur projektiven P2 (K) hatten
wir die Standard–Einbettung
σ : (x, y) 7→ (1 : x : y)
— Version vom: 16. September 2008 —
Details im Skript von
Barth S. 80–84
80
3 Projektive Geometrie
verwendet. Vom Blickwinkel der projektiven Ebene P2 (K) ist aber die bei der
Konstruktion von σ als Bildebene auftretende Bildebene {x0 = 1} ⊂ K3 in
keiner Weise besonders ausgezeichnet: es ist nur eine von vielen Ebenen im
K3 , die nicht durch den Ursprung gehen. Genauso hätten wir aber, wie bei
den baryzentrischen Koordinaten angesprochen, die Ebene {x0 + x1 + x2 = 1}
als Bildebene im K3 verwenden können oder auch {x1 = 1} oder {x2 = 1}.
Unmittelbar sieht man dabei, dass die unendlich ferne Gerade unter den
Einbettungen
(1 : x : y), i = 0
2
2
(x
: 1 : y), i = 1
ϕi : K → P (K), (x, y) 7→
(x : y : 1), i = 2
des K2 als eine der Ebenen {xi = 1} jeweils die projektive Gerade {xi = 0}
ist. Umgekehrt gilt für jeden projektiven Punkt P = (P0 : P1 : P2 ) ∈ P2 (K),
dass eine der Koordinaten von Null verschieden ist und dass P also unter
mindestens einer der Einbettungen ϕi im Urbild ϕ−1 (P2 (K)) sichtbar ist, d.h.
ϕ−1 (P) , ∅ für wenigstens ein i ∈ {0, 1, 2}. Daher führen wir den folgende
Begriff ein:
Definition 3.26. Das Urbild ϕ−1 (P2 (K)) einer Einbettung
K2 → P2 (K),
(x, y) 7→ ϕ(x, y)
ist eine affine Karte oder eine affine Ansicht des P2 (K). Wir sagen, dass die affinen
Karten ϕ−1
(P2 (K)), i = 1, 2, . . . , k den P2 (K) abdecken, wenn:
i
ϕ1 (K2 ) ∪ · · · ∪ ϕk (K2 ) = P2 (K).
Bemerkung 3.27. 1. Sind x, y, z die Koordinaten auf P2 (K), so liegt die Einbettung ϕ : K2 → P2 (K) schon fest durch Angabe einer linearen Beziehung
zwischen x, y, z, bei der zusätzlich bekannt ist, welche der drei Variablen nicht
als Koordinaten im K2 verwendet werden soll. Beispielsweise ist die Karte xi = 1
das Urbild unter der Einbettung ϕi von weiter oben. In dieser Terminologie
decken die Karten x0 = 1, x1 = 1, x2 = 1 die projektive Ebene P2 (K) also ab.
2. Da man für jede Ursprungsebene im K3 eine parallele Ebene, die nicht durch
den Ursprung geht, als affine Karte wählen kann, kann man auf diese Weise jede
projektive Gerade im P2 (K) in der affinen Ansicht als unendlich ferne Gerade
erhalten.
Beispiel 3.28 (Zwei parallele Geraden). Beginnen wir mit zwei parallelen
Geraden in der affinen Ebene R2 mit den Koordinaten x1 , x2 , z.B. g : x1 +
x2 = 1 und h : x1 + x2 = −1. Deren projektive Abschlüsse sind, wenn wir als
homogenisierende Variable x0 verwenden: g : x1 +x2 = x0 bzw. h : x1 +x2 = −x0 .
Betrachten wir diese beiden projektiven Geraden nun in verschiedenen affinen Karten:
— Version vom: 16. September 2008 —
3.3 Projektivitäten
81
1. Die Karte x0 = 1 liefert wieder die beiden parallelen Geraden g und h.
2. Die Karte x1 = 1 hingegen ergibt in der Ebene R2 mit den Koordinaten x0
und x2 die Geraden x2 = x0 −1 und x2 = −x0 −1, die senkrecht aufeinander
stehen. Gleiches gilt für die Karte x2 = 1.
3. Betrachten wir zuletzt noch die Karte x0 = x1 + x2 + 1. Dies liefert durch
Einsetzen in die Gleichungen von g und h die Gleichungen 0 = 1 und
2(x1 + x2 ) = −1. Das erste ist die leere Menge und das zweite eine Gerade.
In dieser affinen Karte sehen wir also nur eine der beiden ursprünglichen
Geraden, weil wir die Gerade g als unendlich ferne gewählt haben.
Das Beispiel macht deutlich, dass eine affine Ansicht eines projektiven Objektes, wie hier zwei Geraden, durchaus alle wesentlichen Eigenschaften des
projektiven Objektes widerspiegeln kann, aber auch große Verwirrung stiften kann, wenn man nämlich wesentliche Teile in der affinen Karte nicht zu
Gesicht bekommt.
⊔
⊓
3.3 Projektivitäten
15. Vorl. — 16. Juni ’08
Nachdem wir den projektiven Raum Pn (K), projektive Unterräume und pro- Perspektivitäten, Proj.
jektive Abbildungen allgemein eingeführt haben, möchten wir nun projektive Ausdehnung, DoppelAbbildungen, die ja auch Projektivitäten genannt werden, etwas besser ver- verhältnis
stehen. Es wird sich herausstellen, dass analog zur Tatsache, dass man eine
lineare Abbildung durch Vorgabe der Bilder einer Basis definieren kann, Projektivitäten festgelegt werden können. Die genaue Aussage liefert das sogenannte Prinzip der projektiven Ausdehnung. Wir werden dann im nächsten
Abschnitt sehen, dass das Doppelverhältnis für die Analogie zur linearen
Algebra ebenfalls eine große Rolle spielt.
3.3.1 Perspektivitäten
Wir beginnen zunächst einer speziellen projektiven Abbildung, einer sogenannten Perspektivität, die das projektive Äquivalent zur Parallelprojektion
in der affinen Ebene ist:
Definition 3.29. Seien l, m ⊂ P2 (K) zwei verschiedene Geraden und Z ∈ P2 (K)
ein Punkt außerhalb davon: Z < l, m. Für jeden Punkt A ∈ l eine Gerade ZA, damit
ein Punkt ZA ∩ l =: B und schließlich eine Abbildung
l → m, A 7→ B = ZA ∩ l
definiert, die Perspektivität mit Zentrum (oder Perspektivitätszentrum) Z heißt,
siehe Abb. 3.8.
Problem:
Analog kann man eine Perspektivität zwischen zwei Hyperebenen des Pn (K) defi- Skizze fehlt:
fig:DefPersp!
nieren.
— Version vom: 16. September 2008 —
82
3 Projektive Geometrie
fig:DefPersp
Abbildung 3.8. SKIZZE fig:DefPersp FEHLT!
Durch geschickte Wahl der Basis kann man beweisen, dass dies tatsächlich
eine Projektivität ist:
Satz 3.30. Jede Perspektivität l → m zwischen zwei Hyperebenen l, m ⊂ Pn (K) ist
eine projektive Transformation
Den Abschnitt im Barth–Skript S. 86–87
über den Beweis, dass Persp. proj. Abb.
sind, haben wir weggelassen!
Pn−1 (K) = l → m = Pn (K).
Beweis.
⊔
⊓
3.3.2 Prinzip der projektiven Ausdehnung
Aus der linearen Algebra ist bekannt, dass die Punkte X̂0 , . . . , X̂n ∈ Kn+1
eine Basis bilden genau dann, wenn sie linear unabhängig sind bzw. den
ganzen Raum Kn+1 aufspannen. Offenbar ist dies genau dann der Fall, wenn
die zugehörigen projektiven Punkte X0 , . . . , Xn ∈ Pn (K) den ganzen Pn (K)
aufspannen. Wir definieren daher:
Definition 3.31. Ein (n + 1)–Tupel X0 , . . . , Xn ∈ Pn (K) heißt projektiv unabhängig, falls die Xi den Pn (K) aufspannen.
Sind Ŷ0 , . . . , Ŷn ∈ Kn+1 beliebige Punkte, so gibt es, da man eine lineare
Abbildung durch Angabe der Bilder von Basiselementen festlegen kann, eine
(n + 1) × (n + 1)–Matrix A mit AX̂i = Ŷi . Sehr einfach folgt damit:
Lemma 3.32. Seien X0 , . . . , Xn ∈ Pn (K) projektiv unabhängige Punkte und
Y0 , . . . , Yn ebenso. Dann existiert eine Projektivität P : Pn (K) → Pn (K) mit
P(Xi ) = Yi , i = 0, . . . , n.
Details im Skript von
Barth S. 87
Details im Skript von
Barth S. 88
Beweis. . . .
⊔
⊓
Die projektive Abbildung P im Lemma ist allerdings nicht eindeutig. Dafür gibt es schon mit n = 1 Beispiele. Trotzdem können wir Eindeutigkeit
erreichen, ween wir die Voraussetzungen ein wenig ändern:
— Version vom: 16. September 2008 —
3.4 Das Doppelverhältnis
83
Satz 3.33 (Prinzip der projektiven Ausdehnung). Seine X0 , . . . , Xn+1 und
Y0 , . . . , Yn+1 zwei (n + 2)–Tupel von Punkten im Pn (K), so dass jedes (n + 1)–
Tupel der Xi bzw. der Yi projektiv unabhängig ist. Dann existiert eine Projektivität
P : Pn (K) → Pn (K) mit P(Xi ) = Yi für i = 0, . . . , n und hierdurch ist diese Projektivität eindeutig bestimmt.
Beweis. . . .
⊔
⊓
Um ein erstes Beispiel für die Mächtigkeit angeben zu können, führen wir
zunächst noch einen Begriff ein:
Details im Skript von
Barth S. 88–89
Definition 3.34. Zwei Mengen von k Punkten X1 , . . . , Xk und Y1 , . . . , Yk im Pn (K)
heißten projektiv äquivalent, falls eine Projektivität P ∈ PGL(n, K) existiert mit
P(Xi ) = Yi .
Beispiel 3.35. Wir betrachten Vierecke, von denen keine drei Punkte kollinear
sind (sogenannte echte Vierecke, siehe Abb. 3.9). Das Prinzip der projektiven
Ausdehnung sagt, dass je zwei solche Vierecke projektiv äquivalent sind. Wir
sagen auch, dass es bis auf projektive Äquivalenz nur ein Viereck gibt.
Problem:
Skizze fehlt:
fig:ViereckeProjAequ!
fig:ViereckeProjAequ
Abbildung 3.9. SKIZZE fig:ViereckeProjAequ FEHLT!
Geben wir uns insbesondere eine Permutation σ ∈ Σ4 vor, so ist jedes echte Viereck X0 X1 X2 X3 projektiv äquivalent zum permutierten Viereck Xσ(0) Xσ(1) Xσ(2) Xσ(3) und es gibt genau eine projektive Abbildung P ∈
PGL(2, K), die diese Permutation realisiert.
⊔
⊓
3.4 Das Doppelverhältnis
Das Prinzip der projektiven Ausdehnung sagt in Dimension 1, dass zu zwei
Tripeln X0 , X1 , X2 und Y0 , Y1 , Y2 jeweils paarweise verschiedener Punkte im
P1 (K) immer eine eindeutige Projektivität P : P1 (K) → P1 (K) existiert mit
P(Xi ) = Yi , i = 0, 1, 2. Insbesondere gilt also:
Korollar 3.36. Zwei Tripel paarweise verschiedener Punkte im P1 (K) sind immer
projektiv äquivalent.
— Version vom: 16. September 2008 —
Den Abschnitt im Barth–Skript S. 90
über Diagonalpunkte am vollständigen
Viereck und die Kleinsche Vierergruppe haben wir weggelassen!
84
3 Projektive Geometrie
3.4.1 Das Doppelverhältnis und Projektivitäten
Details im Skript von
Barth S. 92
Doch wann sind zwei Quadrupel von Punkten projektiv äquivalent? . . .
Satz 3.37 (Doppelverhältnis und Projektivitäten). Zwei Quadrupel X, Y, U, V
und X′ , Y′ , U′ , V ′ im P1 (K) paarweise verschiedener Punkte sind genau dann unter
der PGL(1, K) äquivalent, wenn:
DV(X, Y; U, V) = DV(X′ , Y′ ; U′ , V ′ ).
Details im Skript von
Barth S. 92–93
Beweis. Prinzip der projektiven Ausdehnung, Bijektivität des Teilverhältnisses. . .
⊔
⊓
Beispiel 3.38. Zwei Quadrupel von Geraden durch einen Punkt O im P2 (KK)
sind projektiv äquivalent genau dann, wenn das Doppelverhältnis ihrer Steigungen gleich ist.
⊔
⊓
3.4.2 Erweiterung der Definition des Doppelverhältnisses
Das Doppelverhältnis von vier verschiedenen Punkten X, Y, U, V im P1 (K)
kann man in natürlicher Weise auf die folgenden zwei Fälle erweitern:
1. Maximal zwei der vier Punkte stimmen überein:
a) X = Y oder U = V ⇒ DV(X, Y; U, V) = 1.
b) X = U oder Y = V ⇒ einer der Zähler ist 0, also DV(X, Y; U, V) = 0.
c) X = V oder Y = U ⇒ einer der Nenner ist 0, also DV(X, Y; U, V) = ∞.
2. Die vier Punkte liegen auf einer Geraden l im Pn (K). Dann wählen wir
eine projektive Abbildung P mit P(l) = RS, wobei RS die Verbindungsgerade der Punkte R = (1 : 0 : · · · : 0) und S = (0 : 1 : · · · : 0)
ist. Dann ist das Urbild eines Punktes X ∈ RS unter der Einbettung
ϕ : P1 (K) → Pn (K), (x : y) 7→ (x : y : 0 : · · · : 0) ein Punkt ϕ−1 (X) ∈ P1 (K).
Da sich das Doppelverhältnis unter der Projektivität P nicht ändert, ist so
ein Doppelverhältnis von vier Punkten auf l ⊂ Pn (K) definiert.
3.4.3 Abhängigkeit des Doppelverhältnisses von der Reihenfolge
Details im Skript von
Barth S. 93–94
Details im Skript von
Barth S. 93–95
Analog zum Teilverhältnis hängt das Doppelverhältnis von der Reihenfolge
der vier Punkte ab und zwar in der exakt gleichen Weise, wie man leicht
nachrechnen kann.
Insbesondere fallen dabei jene Doppelverhältnisse λ ∈ P1 (K) auf, bei denen λ
mit einem der Werte übereinstimmt, der sich nach Permutation von Punkten
ergibt. Unter diesen wiederum können wir jene zu einer Klasse zusammen2πi
fassen, die durch eine Permutation auseinander hervorgehen, wobei ω = e 6 :
— Version vom: 16. September 2008 —
3.4 Das Doppelverhältnis
Doppelverhältnisse
1
2,
85
Name für das Quadrupel
harmonisch
entartet
äqui–anharmonisch
−1, 2
0, 1, ∞
ω, ω2
Da uns der entartete Fall, bei dem zwei der Punkte zusammenfallen, und
auch der äqui–anharmonische Fall, der im Reellen nicht auftritt, nicht näher
interessieren, betrachten wir im Folgenden vier harmonisch liegende Punkte
genauer.
3.4.4 Harmonische Quadrupel
16. Vorl. — 17. Juni ’08
Harmonische Quadrupel, Lin. Geom. d. proj.
Ebene
Definition 3.39. Die Punktepaare X, Y und U, V trennen sich harmonisch, falls
DV(X, Y; U, V) = −1.
Es gilt:
Satz 3.40. Seien X, Y, U, V ∈ P1 (K) verschiedene Punkte. Das Paar X, Y trennt das
Paar U, V harmonisch genau dann, wenn eine Projektivität P : P1 (K) → P1 (K)
existiert mit P(U) = U, P(V) = V und P(X) = Y, P(Y) = X.
Beweis.
⊔
⊓
Details im Skript von
Barth S. 96
Damit können wir folgenden Satz beweisen.
Satz/Definition 3.41 (Harmonische Quadrupel am vollständigen Viereck).
Ein Viereck gemeinsam mit allen sechs Verbindungsgeraden heißt vollständiges
Viereck. Auf jeder Seite eines solchen trennen sich harmonisch (s. Abb. 3.10):
Ellipse
• zwei Ecken A, B des Vierecks und
• der Diagonalpunkt X auf dieser Seite und der Schnittpunkt P der Seite mit der
gegenüber liegenden Diagonalen.
Beweis. . . .
⊔
⊓
Problem:
Skizze fehlt:
fig:Voll4EckHarm!
Dieser zunächst recht abstrakt wirkende Satz hat eine sehr konkrete An- Details im Skript von
wendung, nämlich eine Konstruktionsmöglichkeit des vierten harmonischen Barth S. 97
Punktes:
Korollar 3.42 (Konstruktion des vierten harmonischen Punktes). Gegeben
seinen A, B und ein Punkt P ∈ AB auf deren Verbindungsgeraden. Dann existiert
eine Konstruktion des Punktes X, so dass X, P das Paar A, B harmonisch trennen.
— Version vom: 16. September 2008 —
86
3 Projektive Geometrie
fig:Voll4EckHarm
Abbildung 3.10. SKIZZE fig:Voll4EckHarm FEHLT!
Details im Skript von
Barth S. 98
Beweis.
⊔
⊓
In der Geometrie kommen Punkte in harmonischer Lage recht häufig vor.
Beispielsweise gibt es sehr interessante Ortskurven, deren Konstruktion die
Konstruktion des vierten harmonischen Punktes verwendet. Dazu kommen
wir aber erst am Ende des Semesters.
3.5 Lineare Geometrie der projektiven Ebene
In diesem Abschnitt werden wir die Früchte der Detailarbeit mit Basiswechseln usw. ernten können. Nur mit Hilfe einiger allgemeiner Resultate, wie
insbesondere des Prinzips der projektiven Ausdehnung, werden wir schöne und kurze Beweise für die projektiven Varianten der im Affinen schon
vorgestellten Sätze von Pappos und Desargues finden.
Zunächst benötigen wir dazu noch etwas bessere Kenntnisse über projektive
Abbildungen in der Ebene zwischen zwei Geraden. Wir beginnen mit dem
projektiven Analogon zu den Sätzen 2.10 und 2.11 über den Zusammenhang
zwischen Parallelprojektionen und affinen Abbildungen aus der affinen Geometrie:
Satz 3.43 (Projektivitäten und Perspektivitäten). l und m seien zwei Geraden
im P2 (K). Es gilt:
1. Ist l , m, so schreiben wir O := l ∩ m. Dann gilt: Eine Projektivität P : l → m
ist eine Perspektivität genau dann, wenn P(O) = O.
2. Ist l , m, so ist jede Projektivität P : l → m Hintereinanderausführung von
höchstens zwei Perspektivitäten. Ist l = m, so ist P eine Hintereinanderausführung von höchstens drei Perspektivitäten.
Details im Skript von
Barth S. 99–100
Beweis. Perspektivitäten, Prinzip der projektiven Ausdehnung. . . .
— Version vom: 16. September 2008 —
⊔
⊓
3.5 Lineare Geometrie der projektiven Ebene
87
Satz/Definition 3.44 (Achsensatz). Seien l , m ⊂ P2 (K) zwei Geraden und
P : l → m eine Projektivität. Dann existiert eine Gerade h ⊂ P2 (K), die sogenannte
Projektivitätsachse von P, auf der für je zwei Punkte A , B in l die Schnittpunkte
der Geraden AP(B) und BP(A) liegen.
Beweis. . . .
⊔
⊓
Details im Skript von
Barth S. 101
Damit können wir, wie versprochen, den projektiven Satz von Pappos leicht
beweisen, der ja eine Aussage über die Existenz einer Geraden durch gewisse
Punkte ist.
Korollar 3.45 (Satz von Pappos). Seien l , m ⊂ P2 (K) zwei Geraden. Die drei
Punkte A1 , A2 , A3 ∈ l und B1 , B2 , B3 ∈ m seien voneinander und von O := l ∩ m
verschieden. Dann liegen die drei Schnittpunkte Ai B j ∩ A j Bi , i , j = 1, 2, 3, auf
einer gemeinsamen Geraden.
Problem:
Skizze fehlt:
fig:ProjPappos!
fig:ProjPappos
Abbildung 3.11. SKIZZE fig:ProjPappos FEHLT!
Beweis. Nach dem Prinzip der projektiven Ausdehnung existiert eine Projektivität P : l → m mit P(Ai ) = Bi für i = 1, 2, 3. Die Achse dieser Projektivität
enthält alle Punkte AP(B) ∩BP(A) mit A, B ∈ l und damit auch die drei Schnittpunkte.
⊔
⊓
Bevor wir den projektiven Satz von Desargues beweisen, geben wir noch die
folgende nette Anwendung auf ein Problem, das vor der Verwendung von
dynamischer Geometrie Software insbesondere für technische Zeichner ein
sehr relevantes war:
Korollar 3.46 (Schnittpunkt zweier Geraden außerhalb des Zeichenblattes). Es seien zwei Geraden l , m auf einem Zeichenblatt gezeichnet, deren Schnittpunkt S außerhalb des Zeichenblattes liegt. Dann kann man den Teil der Verbindungsgerade SC des Punktes S mit einem gegebenen Punkt C des Zeichenblattes,
zeichnen, der auf dem Zeichenblatt liegt (Abb. 3.12).
Problem:
Skizze fehlt:
fig:GerAusBlatt!
— Version vom: 16. September 2008 —
88
3 Projektive Geometrie
fig:GerAusBlatt
Abbildung 3.12. SKIZZE fig:GerAusBlatt FEHLT!
Beweis. . . .
Details im Skript von
Barth S. 102
17. Vorl. — 23. Juni ’08
Satz von Desargues,
Dualität
⊔
⊓
Ebenfalls ein sehr runder, kurzer Beweis zeigt auch die projektive Variante
des Satzes von Desargues:
Definition 3.47. Zwei Dreiecke A1 A2 A3 und B1 B2 B3 heißen perspektiv, falls eine
Perspektivität ϕ mit Zentrum Z , Ai , Bi , i = 1, 2, 3, existiert mit ϕ(Ai ) = Bi .
Satz 3.48 (Satz von Desargues). Es seien A1 A2 A3 und B1 B2 B3 zwei bzgl. Z perspektiv liegende Dreiecke im P2 (K). Dann sind die drei Punkte
T1 := A2 A3 ∩ B2 B3 , T2 := A1 A3 ∩ B1 B3 , T3 := A1 A2 ∩ B1 B2
Problem:
Skizze fehlt:
fig:ProjDesargues!
kollinear (Abb. 3.13).
fig:ProjDesargues
Abbildung 3.13. SKIZZE fig:ProjDesargues FEHLT!
Details im Skript von
Barth S. 102
Beweis. Nachrechnen.
⊔
⊓
Gilt auch die Umkehrung dieses Satzes? Diese Frage werden wir mit Hilfe
des Dualitätsprinzips beantworten.
— Version vom: 16. September 2008 —
3.6 Das Dualitätsprinzip in der projektiven Ebene
89
3.6 Das Dualitätsprinzip in der projektiven Ebene
Wir haben schon mehrfach gesehen, dass Punkte und Geraden der projektiven Ebene in vielen Fällen entgegengesetzte Eigenschaften haben: Durch zwei
Punkte geht genau eine Geraden; zwei Geraden schneiden sich in genau eine
Punkt. Ein homogenes Tripel (a : b : c) beschreibt genau einen projektiven
Punkt der projektiven Ebene aber auch genau eine projektive Gerade. Diese Beobachtungen kann man tatsächlich zu einem allgemeingüliten Prinzip
ausbauen, das eines der wichtigsten Konzepte der projektiven Geometrie ist.
3.6.1 Das Dualitätsprinzip
Betrachten wir die Ausage, dass ein homogenes Tripel sowohl einen Punkt als
auch eine projektive Gerade definiert, etwas genauer: Eine Gerade l ⊂ P2 (K)
hat eine Gleichung
l : l0 x0 + l1 x1 + l2 x2 = 0
für gewissen li ∈ K. Für einen Punkt (P0 : P1 : P2 ) ∈ P2 (K) gilt:
P liegt auf l ⇐⇒ l0 P0 + l1 P1 + l2 P2 = 0.
Umgekehrt:
l enthält P ⇐⇒ l0 P0 + l1 P1 + l2 P2 = 0.
Besonders eingängig wird dies, wenn wir statt liegt auf und enthält das Wort
inzidiert mit verwenden. Wir schreiben dies: P i l oder l i P:
P inzidiert mit l ⇐⇒ l inzidiert mit P ⇐⇒ l0 P0 + l1 P1 + l2 P2 = 0.
Definition 3.49. Für einen Punkt P = (P0 : P1 : P2 ) ∈ P2 (K) ist die Gerade
P∗ : P0 x0 + P1 x1 + P2 x2 = 0 ⊂ P2 (K)
die duale Gerade zu P. Für eine Gerade l = (l0 : l1 : l2 ) ⊂ P2 (K) ist der Punkt
l∗ := (l0 : l1 : l2 ) ∈ P2 (K)
der duale Punkt zu l.
Offenbar gilt:
Proposition 3.50. Ist P = (P0 : P1 : P2 ) ∈ P2 (K) ein Punkt und l = (l0 : l1 : l2 ) ⊂
P2 (K) eine Gerade, dann gilt:
1. P ∈ l ⇐⇒ P∗ ∋ l∗ bzw. P i l ⇐⇒ P∗ i l∗ .
— Version vom: 16. September 2008 —
90
3 Projektive Geometrie
2. Die Dualitätsbeziehung ist symmetrisch, d.h.:
l = P∗ ⇐⇒ l∗ = P.
Weil man die Rollen von Punkt und Gerade bei der Inzidenz vertauschen
kann, bleibt eine Inzidenz zwischen einem Punkt und einer Geraden beim
Übergang zum dualen Punkt und der dualen Geraden erhalten. Dies ist der
Beweis des Dualitätsprinzips:
Satz 3.51 (Dualitätsprinzip). Gilt eine Aussage über Punkte und Geraden, die
nur mit Hilfe von Inzidenzen formuliert ist, so gilt auch die duale Aussage, die man
erhält, wenn man folgende Ersetzungen vornimmt:
Punkt
Gerade
Inzidenz
Problem:
Bilder in Tabelle
fehlen noch!
7→
7→
7→
die duale Gerade
der duale Punkt
die Inzidenz zwischen den dualen Objekten.
Beispiel 3.52. Für die einfachsten geometrischen Figuren, die man aus Punkten und Geraden der projektiven Ebene bilden kann, ergibt sich:
Figur
Duale Figur
Punkte
Gerade
Punkt auf einer Geraden
P ∈ l bzw. P i l
Gerade durch einen Punkt
l ∋ P bzw. l i P
zwei Punkte auf einer Geraden
P1 , P2 ∈ l bzw. P1 , P2 i l
zwei Geraden durch einen Punkt
l1 , l2 ∋ P bzw. l1 , l2 i P
3 Geraden treffen sich in 1 Punkt
∃P : l1 , l2 , l3 i P
3 Punkte liegen auf 1 Geraden
∃l : P1 , P2 , P3 i l
Viereck
Vierseit.
Schnittpunkt zweier Geraden
P = l1 ∩ l2
Dreieck
Gerade durch zwei Punkte
l = P1 P2
Dreiseit
⊔
⊓
3.6.2 Erste Anwendungen des Dualitätsprinzips
Durch Vornehmen der oben angegebenen Ersetzungen folgt aus dem Satz von
Pappos mit dem Dualitätsprinzip die folgende Umkehrung des Satzes von
Pappos. Hierzu ist allerdings zu bemerken, dass die Formulierung nicht den
Begriff der Inzidenz verwendet; wir müssen daher beim Dualisieren etwas
aufpassen und die Ersetzungen analog zum vorigen Beispiel vornehmen:
— Version vom: 16. September 2008 —
3.6 Das Dualitätsprinzip in der projektiven Ebene
91
Korollar 3.53 (Dual des Satzes von Pappos). Seien A , B zwei Punkte im P2 (K)
und mi ∋ A, ni ∋ B, i = 1, 2, 3 jeweils drei verschiedene Geraden durch einen der
Punkte. Dann treffen sich die Verbindungsgeraden
(mi ∩ n j )(ni ∩ m j ), i , j,
in einem Punkt.
Nicht immer liefert Dualisieren etwas Neues. Beispielsweise ergibt Dualisieren eines Dreiecks (also drei Punkte mit ihren Verbindungsgeraden) ein
Dreiseit (nämlich drei Geraden mit ihren drei Schnittpunkten). Interessanter
Weise erhalten wir als duales Bild zum Satz 3.48 von Desargues ebenfalls
wieder das Bild des Satzes von Desargues (Abb. 3.14), die Aussage ist aber
eine neue, und zwar gerade die Umkehrung des ursprünglichen Satzes:
Korollar 3.54 (Dual und Umkehrung des Satzes von Desargues). Liegen die
drei Schnittpunkte der drei Paare korrespondierender Seiten zweier Dreiecke auf einer
Geraden, so liegen die Dreiecke perspektiv.
fig:DualDesargues
Abbildung 3.14. SKIZZE fig:DualDesargues FEHLT!
3.6.3 Dualität und Projektivitäten
Bisher haben wir die Dualität koordinaten–gebunden erklärt. Um auch Projektivitäten auf duale Objekte anzuwenden, benötigen wir eine abstraktere
Variante der Dualität. Dazu müssen wir zunächst einmal abstraktere projektive Räume definieren:
Definition 3.55. Ist V ein (n+1)–dimensionaler K–Vektorraum, so heißt die Menge
P(V) := { eindimensionale Untervektorräume von V}
projektiver Raum zu V, wobei die Geraden die zwei–dimensionalen Untervektorräume von V sind.
— Version vom: 16. September 2008 —
Problem:
Skizze fehlt:
fig:DualDesargues!
92
3 Projektive Geometrie
Natürlich können wir für diese projektiven Räume analog zu Pn (K) Projektivitäten definieren und es ist klar, dass es eine Projektivität P(V) → Pn (K)
gibt, falls V ein (n + 1)–dimensionaler K–Vektorraum ist, weil ja alle solchen
Vektorräume isomorph zu Kn+1 sind. Außerdem ist P(V) P2 (K) im Sinne
der axiomatischen Definition 3.6 projektiver Ebenen, falls dim(V) = 3.
Wie üblich bezeichnen wir mit V ∗ den dualen Vektorraum zu V, d.h. die
Menge
V ∗ := {l : l0 X0 + l1 X1 + · · · + ln Xn | li ∈ K}
aller Linearformen l : V → K auf V. Dies ist offenbar wieder ein (n + 1)–
dimensionaler K–Vektorraum (mit Basis {X0 , X1 , . . . , Xn }). Daher können wir
die obige Definition des projektiven Raumes auch auf V ∗ anwenden:
Definition 3.56. P∗ (V) := P(V ∗ ) heißt dualer projektiver Raum zu P(V) und
duale projektive Ebene, falls dim(V) = 3.
Punkte der dualen Ebene
Nach Definition sind die Punkte der dualen Ebene Linearformen auf V. Dies
passt mit unserer oben gegenbenen Idee zusammen, dass wir beim Dualisieren Punkte und Geraden vertauschen müssen, denn für l = l0 X0 +l1 X1 +l2 X2 ∈
V ∗ und X ∈ V ist l(X) = 0 ⇐⇒ X liegt auf der Ursprungsebene orthogonal
zu (l0 , l1 , l2 ). Die Linearform l definiert also eine projektive Gerade l ⊂ P(V)
und umgekehrt:
Geraden l ⊂ P2
Bijektion
↔
∗
Punkte l∗ ∈ P2 .
Verträglichkeit der Dualität mit Projektivitäten
Ist nun eine Projektivität P : P2 (K) → P2 (K) gegeben vermöge einer inver∗
∗
tierbaren linearen Abbildung Φ : K3 → K3 . Wir suchen P∗ : P2 (K) → P2 (K),
so dass die Inzidenzen erhalten bleiben, also:
X ∈ l ⇐⇒ l(X) = 0 ⇐⇒ (P∗ (l))(P(X)) = 0.
Auf der Ebene der linearen Abbildungen suchen wir entsprechend:
Φ∗ : V ∗ → V ∗ : (Φ∗ (l̂))(Φ(X̂)) = l̂(X̂).
Aus der linearen Algebra wissen wir, dass eine kanonische Abbildung
Φt : V ∗ → V ∗ existiert (die durch die transponierte Matrix gegeben ist) und
dass für diese gilt:
l̂(Φ(X̂)) = (Φt (l̂))(X̂) ∀l̂ ∈ V ∗ , X̂ ∈ V.
— Version vom: 16. September 2008 —
(3.1)
3.6 Das Dualitätsprinzip in der projektiven Ebene
93
Wer dies aus der linearen Algebra nicht mehr weiß, kann diese Eigenschaft
auch einfach explizit nachrechnen (wie in der Vorlesung vorgeführt).
∗
∗
t −1
Die gesuchte Abbildung Φ ist nun Φ := (Φ ) , denn:
Problem:
Eigenschaft (3.1) von
Φt noch ausführen!
(3.1)
(Φ∗ (l̂))(Φ(X̂) = (Φt (Φ∗ (l̂)))(X̂) = (Φt ((Φt )−1 (l̂)))(X̂) = l̂(X̂).
Es gibt also tatsächlich eine Projektivität P∗ auf der dualen projektiven Ebene,
die mit den Inzidenzen und P verträglich ist.
Geraden der dualen Ebene
Nachdem wir eben verstanden haben, was Punkte der dualen projektiven
Ebene sind und warum Inzidenzen unter Projektivitäten auch in der dualen
projektiven Ebene erhalten bleiben, möchten wir nun noch Geraden in der
dualen projektiven Ebene anschaulich verstehen.
...
18. Vorl. — 24. Juni ’08
Duale Geraden, Proj.
Kegelschnitte über R,
C
Details im Skript von
Barth S. 107
∗
Proposition 3.57. Eine Gerade in P2 (K) besteht genau aus allen Geraden im P2 (K),
die durch einen festen Punkt gehen.
Definition 3.58. Eine Menge von Geraden im P2 (K), die durch einen gemeinsamen
Punkt Z gehen, heißt Geradenbüschel mit Zentrum Z (Abb. 3.15).
Problem:
Skizze fehlt:
fig:Geradenbueschel!
fig:Geradenbueschel
Abbildung 3.15. SKIZZE fig:Geradenbueschel FEHLT!
Satz 3.59. Seien l , m ⊂ P2 (K) zwei Geraden durch Z ∈ P2 (K) und sei n eine
Gerade mit Z < n. Dann ist die Abbildung
∗
P1 (K) = {λl + µm | (λ : µ) ∈ P1 (K)} → n,
(λ : µ) 7→ (λl + µm) ∩ n
eine Projektivität.
Beweis. Basis geschickt wählen. . .
— Version vom: 16. September 2008 —
⊔
⊓
Den Abschnitt im Barth–Skript S. 108
über den Beweis von 3.59 haben wir
weggelassen!
Details im Skript von
Barth S. 108
94
3 Projektive Geometrie
Das Doppelverhältnis vierer Geraden
Der duale Vektorraum V ∗ zu einem drei–dimensionalen Vektorraum V ist
auch ein solcher. Dass vier Geraden zu einer dualen Geraden gehören bedeutet, dass sie zu einem Geradenbüschel gehören. Daher können wir das
Doppelverhältnis vierer solcher Geraden definieren:
Definition 3.60. Das Doppelverhältnis von vier Geraden l1 , l2 , m1 , m2 im P2 (K),
die sich in einem Punkt treffen, ist:
DV(l1 , l2 ; m1 , m2 ),
wobei hier l1 , l2 , m1 , m2 als Punkte auf einer dualen Geraden in P2 (K)∗ angesehen
werden.
Damit folgt aus dem obigen Satz 3.59 direkt:
Korollar 3.61 (Doppelverhältnis von Geraden und Punkten). Seien
l1 , l2 , m1 , m2 ⊂ P2 (K) vier Geraden eines Geradenbüschels. Ist n ⊂ P2 (K) eine
Gerade, die nicht zu diesem Büschel gehört, so gilt:
DV(l1 , l2 ; m1 , m2 ) = DV(l1 ∩ n, l2 ∩ n; m1 ∩ n, m2 ∩ n).
Korollar 3.62. Seien l1 , l2 , m1 , m2 ⊂ P2 (K) vier Geraden eines Geradenbüschels. Ist
n ⊂ P2 (K) eine Gerade, die nicht zu diesem Büschel gehört, so gilt: l1 , l2 und m1 , m2
trennen sich harmonisch genau dann, wenn sich die von ihnen auf n ausgeschnittenen
Punktepaare harmonisch trennen.
Damit können wir den Satz 3.41 über harmonische Quadrupel am vollständigen Viereck folgendermaßenbo umformuliert werden:
Korollar 3.63 (Doppelverhältnis am vollständigen Viereck, vgl. Satz 3.41).
In jedem Diagonalpunkt eines vollständigen Vierecks trennen sich die beiden dort
hindurchgehenden Seiten und die beiden Verbindungsgeraden mit den zwei anderen
Diagonalpunkten harmonisch.
— Version vom: 16. September 2008 —
4
Projektive Kegelschnitte
Da das Studium der projektiven Kegelschnitte sehr reich und faszinierend
ist, widmen wir diesem Thema ein eigenes Kapitel.
Zunächst werden wir sehen, wie viel einfacher und schöner die Klassifikation der projektiven Kegelschnitte ist als ihre affine Variante und worin
der Zusammenhang zwischen den affinen und projektiven Kegelschnitten
liegt. Anschließend betrachten wir die Analoga von Polaren an projektive
Kegelschnitte und das Doppelverhältnis vierer Punkte auf Kegelschnitten.
Außerdem werden wir sehen, dass man projektive Kegelschnitte in gewisser
Hinsicht als Geraden auffassen kann und wie wir mit der entsprechenden
Theorie den schon angesprochenen Satz von Poncelet beweisen können.
Schließlich werden wir erfahren, dass es auch auf Kegelschnitten einen Achsensatz gibt und dass wir, genauso wie beim Satz von Pappos, daraus dessen
Variante für Kegelschnitte folgern können, den Satz von Pascal. Auch hier
wird uns Dualisieren wieder ohne zusätzlichen Aufwand weitere interessante Resultate liefern und wir werden sogar in der Lage sein, den Satz von
Poncelet zu beweisen.
Kegelschnitte sind darüber hinaus essentiell für ein sinnvolles Abstands–
Konzept in der projektiven Ebene. Dieses erlaubt die einheitliche Behandlung von Abständen in vielen unterschiedlichen Geometrien, wie beispielswiese der euklidischen und (in dieser Vorlesung nicht behandelten) nicht–
euklidischen.
4.1 Klassifikation der projektiven Kegelschnitte
...
Definition 4.1. Sei 0 , Q(X0 , X1 , X2 ) ein homogenes Polynom vom Grad 2. Dann
heißt
Details im Skript von
Barth S. 109
96
4 Projektive Kegelschnitte
K := {X ∈ P2 (K) | Q(X) = 0} ⊂ P2 (K)
ein (projektiver) Kegelschnitt. Wir schreiben wieder:
f d e X0
Q(X0 , X1 , X2 ) = Xt AQ X := (X0 , X1 , X2 ) · d a b · X1 .
X2
e bc
4.1.1 Die Klassifikation
Wir möchten nun Kegelschnitte bis auf projektive Transformationen klassifizieren, um zu erfahren, welche Eigenschaften der Kegelschnitte unter projektiven Transformationen invariant bleiben. Sei dazu T : P2 (K) → P2 (K) eine
projektive Abbildung (auch Koordinaten–Transformation genannt). Dann
ergibt sich mit X = TY:
Q(X) = Xt AQ X = Yt Tt AQ TX.
Details im Skript von
Barth S. 110
...
Insgesamt erhalten wir den Satz:
Satz 4.2 (Klassifikation der projektiven Kegelschnitte über R und C). Durch
eine projektive Koordinaten–Transformation kann man die Gleichung eines Kegelschnittes im P2 (C), auf folgende Normalform bringen:
Rg(AQ )
3
Normalform Name
X02 + X12 + X22 = 0 glatt, nicht–entartet, nicht–singulär
X02 + X12 = 0 Geradenpaar
2
X02 = 0 Doppelgerade
1
Im P2 (R) teilen sich zwei der Fälle auf; zur eindeutigen Klassifizierung benötigen
wir zusätlich die Signatur, d.h. das Paar (n, m), wobei n die Anzahl der positiven
und b die Anzahl der negativen Eigenwerte der Matrix AQ angibt:
Rg(AQ )
Normalform Signatur Name
3
X02 + X12 + X22 = 0
(3, 0)
3
X02 + X12 − X22 = 0
(2, 1)
=0
(2, 0)
Punkt
=0
(1, 1)
Geradenpaar
=0
(1, 0)
Doppelgerade
2
2
1
X02
X02
+
−
X12
X12
X02
∅ (leere Menge)
glatt, nicht–entartet, nicht–singulär
Definition 4.3. Wie im Satz bereits angegeben, heißen nicht–leere Kegelschnitte
vom Rang 3 glatt, nicht–entartet oder nicht–singulär und Kegelschnitte von
kleinerem Rang dementsprechend entartet oder singulär.
— Version vom: 16. September 2008 —
4.1 Klassifikation der projektiven Kegelschnitte
97
Definition 4.4. Ist Q ein projektiver Kegelschnitt, so heißt Rg(AQ ) der Rang und
Signatur(AQ ) die Signatur des Kegelschnittes.
Bemerkung 4.5. Offenbar sind die komplexen projektiven Kegelschnitte allein durch
den Rang und die reellen projektiven Kegelschnitte durch Rang und Signatur klassifiziert.
4.1.2 Entartetete Kegelschnitte über C
Über den komplexen Zahlen ist die obige Klassifikation besonders einfach.
Für die entarteten Kegelschnitte gibt es außerdem im komplexen Fall folgende Charakterisierung:
Korollar 4.6 (Entartetet Kegelschnitte über C). In P2 (C) sind für einen Kegelschnitt K : Q(X) = aX12 + 2bX1 X2 + cX22 + 2dX0 X1 + 2eX0 X2 + f X02 = 0 äquivalent:
1. K ist entartet.
2. K spaltet in zwei Geraden: Q(X) = l(X) · l′ (X), wobei l, l′ Linearformen sind.
3. Es existiert eine Gerade l ⊂ P2 (C) : l ⊂ K.
Die Implikation 3. ⇒ 1. gilt über jedem Körper K mit unendlich vielen Elementen.
Beweis. 1. ⇒ 2. ⇒ 3. ist klar. Im letzten Fall (3. ⇒ 1.) können wir vermöge einer
Koordinaten–Transformation annehmen, dass die Gerade die Form l : X0 = 0
hat. Betrachten wir nun die Einschränkung von K auf l, so ergibt sich aus der
Voraussetzung:
Q|l = aX12 + 2bX1 X2 + cX22 ≡ 0.
Da |K| = ∞, folgt: a = 0 ⇒ b = 0 ⇒ c = 0, also:
f d e
d 0 0
AQ =
,
e 00
d.h. Rg(AQ ) ≤ 2.
⊔
⊓
Natürlich gilt ein entsprechender Satz nicht über R, wie schon das Beispiel
X02 + X12 = 0 zeigt.
4.1.3 Reelle glatte projektive Kegelschnitte
Wir haben im Klassifikationssatz gesehen, dass es über den reellen Zahlen
nur eine Äquivalenzklasse von projektiven glatten Kegelschnitten gibt. Wir
möchten dies hier auf verschiedene Weisen veranschaulichen.
...
Details im Skript von
Barth S. 112
— Version vom: 16. September 2008 —
98
4 Projektive Kegelschnitte
4.2 Duale Kegelschnitte
19. Vorl. — 30. Juni ’08
Duale KS, Tangenten,
Polaren
Wir haben im Abschnitt 3.6 über das Dualitätsprinzip gesehen, wie sich Aussagen über Punkte und Geraden dualisieren und dass dabei insbesondere ein
Punkt in eine Gerade und umgekehrt eine Gerade in einen Punkt übergeht.
Da wir im vorigen Abschnitt gesehen haben, dass Kegelschnitte sinnvolle
Objekte der projektiven Geometrie sind, stellt sich die Frage, wie sich diese dualisieren lassen. Wir werden nun sehen, dass projektive Kegelschnitte
hervorragend in dieses Konzept passen. Dazu müssen wir Tangenten und
Polaren für projektive Kegelschnitte analog zu den Begriffen am Kreis einführen.
Im ganzen Abschnitt werden wir meist stillschweigend über C arbeiten, um
nicht jedes Mal diskutieren zu müssen, ob eine gewisse quadratische Gleichung eine Lösung hat oder nicht. Nur manchmal werden wir explizit auf
den reellen Fall eingehen.
4.2.1 Tangenten an Kegelschnitte
Wie schon angedeutet, gehen wir ganz analog zur Einführung von Tangenten am Kreis vor und berechnen zunächst allgemein den Schnittpunkt eines
Kegelschnittes K : Xt MX = 0 mit einer mit (λ : µ) ∈ P1 (K) parametrisieren
Geraden l : X = λA + µB durch zwei Punkte A, B ∈ P2 (K). Einsetzen von l in
K ergibt, weil M symmetrisch ist:
(λA + µB)t M(λA + µB) = λ2 (At MA) + µ2 (Bt MB) + 2λµ(At MB) = 0.
(4.1)
Da A, B und M fest gewählt sind, ist dies eine homogene Gleichung für (λ : µ)
vom Grad 2 und hat daher (weil l 1 K, da K nicht–entartet ist) höchstens zwei
projektive Nullstellen (λ : µ) ∈ P1 (K) (ist ∞ = (0 : 1) keine der Nullstellen,
so können wir die affine Karte λ = 1 wählen und erhalten eine Gleichung
in einer Variablen µ vom Grad 2, die man z.B. mit Hilfe der p, q–Formel
lösen kann. Eine einzige (doppelte) Nullstelle ergibt sich genau dann, wenn
der Ausdruck unter der Wurzel, die Diskriminante D verschwindet. Im
projektiven Fall erhalten wir:
D = (At MB)2 − (At MB)(Bt MB)
und es wir definieren:
D = 0 ⇐⇒ : l ist Tangente an K.
— Version vom: 16. September 2008 —
(4.2)
4.2 Duale Kegelschnitte
99
4.2.2 Polaren zu Kegelschnitten
Ähnlich können wir Polare an Kreise auf Polare an Kegelschnitte verallgemeinern. Dazu fixieren wir, analog zum Abschnitt über Kreise, einen Punkt
A ∈ P2 (K) und einen Kegelschnitt K : Xt MX = 0. Wir suchen nun die Berührpunkte B ∈ K aller Tangenten an K durch A.
Da B ∈ K, gilt Bt MB = 0 und Gleichung (4.2) vereinfacht sich zu: At MB = 0.
Alle Berührpunkte B liegen also auf der Geraden
PA := {X ∈ P2 (K) | At MX = 0},
der sogenannten Polaren an K. Da umgekehrt offenbar auch jeder Punkt auf
dieser Geraden, der auf dem Kegelschnitt liegt, ein Berührpunkt ist, ist PA ∩K
tatsächlich genau die Menge aller Berührpunkte der Tangenten durch A an
K. Wie oben gesehen, sind dies höchstens zwei Punkte.
Problem:
Skizze fehlt:
fig:BeruehrpunktePolare!
fig:BeruehrpunktePolare
Abbildung 4.1. SKIZZE fig:BeruehrpunktePolare FEHLT!
Beispiel 4.7. Die Polare an den projektiven Abschluss einer Ellipse/Hyperbel
2
mit Gleichung xa2 ±
C = (1 : C1 : C2 ) ist:
y2
b2
= 1 an einen in der Standard–Karte sichtbaren Punkt
PC = {X ∈ P2 (K) | Ct MX = −X0 +
C1
C2
X1 ± 2 X2 = 0}.
a2
b
Dies deckt sich im Fall des Kreises mit der entsprechenden Definition der
Polaren. Als Polare des Einheitskreises zum affinen Ursprung (1 : 0 : 0)
finden wir: X0 = 0, also die unendlich ferne Gerade l∞ , was nicht wirklich
erstaunen sollte.
⊔
⊓
Interessanter Weise haben auch Polaren an Kegelschnitten sehr viel mit Harmonie zu tun, wie das folgende Resultat zeigt:
— Version vom: 16. September 2008 —
Den Abschnitt im Barth–Skript S. 115
über Polare an die Parabel haben wir
weggelassen!
100
Details im Skript von
Barth S. 115–116
4 Projektive Kegelschnitte
Satz 4.8 (Polare und Harmonie). Die Polare PA von A ∈ P2 (K) zum Kegelschnitt
K : Xt MX ⊂ P2 (K) ist der geometrische Ort aller Punkte B, die mit A die beiden
Schnittpunkte (falls sie existieren) der Geraden AB mit K harmonisch trennen.
Beweis.
⊔
⊓
Bemerkung 4.9. Im obigen Satz über Polare und Harmonie sind folgende Ausnahmefälle zu berücksichtigen:
1. Falls S1 , S2 über K nicht existieren, so mach der Satz keine Aussage.
2. A ∈ K ⇐⇒ B auf einer der Tangenten von A an K. Dann fallen zu viele Punkte
zusammen, um von Harmonie sprechen zu können.
4.2.3 Polaritäten
Das Ziel dieses Abschnittes ist die Dualisierung von Kegelschnitten. Ein erster
Schritt dazu ist nun die Abbildung
∗
σK : P2 (K) ∋ A 7→ PA ∈ P2 (K),
die für alle A definiert ist, auch wenn die zugehörigen Tangenten über K
nicht existieren.
Diese Abbildung ist bijektiv, da M invertierbar ist: Ist eine Gerade
l = (l0 : l1 : l2 ) = {l0 X0 + l1 X1 + l2 X2 = 0} = {lt X = 0}
2
−1
gegeben, so ist σ−1
K (l) ∈ P (K) der Punkt A = M l und PA = l, da:
(M−1 )t MX = lX,
weil M symmetrisch ist. Wir definieren daher:
Definition 4.10. Ist K ein glatter Kegelschnitt, so heißt σK die durch K definierte
Polarität und umgekehrt σ−1 (l) Pol der Geraden l bzgl. K.
Außerdem heißen zwei Punkte A, B ∈ P2 (K) konjugiert bzgl. K, wenn At MB = 0,
wenn also ein Punkt auf der Polaren des anderen liegt.
Bemerkung 4.11. Da M symmetrisch ist, ist die Konjugations–Relation ebenfalls
symmetrisch: B ∈ PA ⇐⇒ A konjugiert zu B ⇐⇒ B konjugiert zu A ⇐⇒ A ∈
PB .
Mit diesem neuen Begriff können wir den Satz über Polare und Harmonie
kürzer fassen:
Korollar 4.12 (Umformulierung des Satzes 4.8 über Polare und Harmonie).
Zwei bzgl. eines glatten Kegelschnittes K : Xt MX = 0 ⊂ P2 (K) konjugierte Punkte
A , B trennen die beiden Schnittpunkte AB ∩ K (falls sie existieren) harmonisch.
— Version vom: 16. September 2008 —
4.2 Duale Kegelschnitte
101
4.2.4 Dualisierung eines Kegelschnitts
Schließlich haben wir alle Begriffe eingeführt, um die Dualisierung eines
glatten Kegelschnittes K : Xt MX = 0 betrachten zu können. Wir bemerken
zunächst, dass offenbar gilt:
Proposition 4.13. A ∈ PA ⇐⇒ At MA = 0 ⇐⇒ A ∈ K.
Dies liefert für eine Gerade l : A + sB, wieder mit Hilfe von (4.2) und mit der
Notation TA für die Tangente an K in A:
l = TA ⇐⇒ Diskriminante (At MB)2 − (At MA)(Bt MB)) = 0
⇐⇒ At MB = 0
⇐⇒ 0 = At MA + sAt MB = At M(A + sB)
⇐⇒ P = A + sB ∈ TA liegt auf der Polaren PA .
Insgesamt erhalten wir:
Proposition 4.14. Sei K ein glatter Kegelschnitt. Dann ist die Tangente TA an K in
A ∈ K gerade die Polare PA von A bzgl. K.
Mit anderen Worten:
∗
l = (l0 : l1 : l2 ) ∈ P2 (K) ist Tangente ⇐⇒ ∃A ∈ K : l = PA
⇐⇒ ∃A ∈ K : lt = At M
⇐⇒ A = M−1 l ∈ K
⇐⇒ (M−1 l)t M(M−1 l)
M symm.
=
lt M−1 l = 0.
Dies ist aber wieder eine Kegelschnittgleichung, allerdings für Punkte l ∈
∗
P2 (K) aus der dualen Ebene. Das Duale eines Kegelschnittes ist also wiederum ein Kegelschnitt; wie definieren:
Definition 4.15. Ist K : Xt MX = 0 ⊂ P2 (K) ein glatter projektiver Kegelschnitt, so
∗
heißt K∗ : lt M−1 l = 0 ⊂ P2 (K) dualer Kegelschnitt zu K.
Die obigen Rechnungen zeigen:
Satz 4.16. Die Tangenten an den glatten Kegelschnitt K : Xt KX = 0 sind genau die
∗
Geraden l ∈ P2 (K), die auf dem dualen Kegelschnitt K∗ mit Matrix M−1 liegen.
Daraus erhalten wir:
Korollar 4.17. Ist K : Xt MX = 0 ein glatter Kegelschnitt, so gilt:
K∗∗ = K
— Version vom: 16. September 2008 —
Problem:
Skizze fehlt:
fig:TangentenDualKS!
102
4 Projektive Kegelschnitte
fig:TangentenDualKS
Abbildung 4.2. SKIZZE fig:TangentenDualKS FEHLT!
Beweis. (M−1 )−1 = M.
⊔
⊓
Die obigen Rechnungen zeigen außerdem:
Korollar 4.18. Sei K : Xt MX = 0 ein glatter Kegelschnitt. Dann bildet die Polarität
∗
σK : P2 (K) → P2 (K), A 7→ PA jeden Punkt A ∈ K auf seine Tangente an K ab.
∗
Das Bild von K unter σK ist also K∗ ⊂ P2 (K).
Es ist nun ein Leichtes, die Beziehungen zwischen Pol, Polare und konjugierten Punkte zu dualisieren. Siehe dazu S. 117–118 im Barth Skript [Bar04].
Den Abschnitt im Barth–Skript S. 118–
121 über konjugierte Geraden haben wir
weggelassen!
4.3 Cayley–Klein–Geometrien
20. Vorl. — 01. Juli ’08
Cayley–Klein–
Geometrien
——
ab hier nicht im Barth–Skript
Wir haben gesehen, dass dynamische Geometrie Software, die mit unendlich
fernen Punkte umgehen können und die das Kontinuitätsprinzip konsequent
umsetzen möchte, im P2 (C) arbeiten muss. Dabei haben wir aber bisher die
Frage außer acht gelassen, wie die dann mit der Notwengikeit des Abstands–
und Winkel–Berechnens in Einklang zu bringen ist.
Hierfür liefern die sogenannten Cayley–Klein–Geometrien eine sehr elegante
und einheitliche Lösung, nicht nur für den Zusammenhang zwischen projektiver und euklidischer Geometrie, sondern darüber hinaus sogar elliptischer
und hyperbolischer Geometrie.
Die Basis für diesen Zugang wir ein Paar K, K∗ von zueinander dualen Kegelschnitten sein. Im gesamten Abschnitt arbeiten wir über den komplexen
Zahlen.
4.3.1 Winkel–Berechnung mit komplexen Zahlen
Zu zwei affinen Geraden l, m ∈ R2 mit projektiven Koordinaten l = (1 : l1 : l2 )
und m = (1 : m1 : m2 ) möchten wir den eingeschlossenen Winkel ∠(l, m)
berechnen.
— Version vom: 16. September 2008 —
4.3 Cayley–Klein–Geometrien
103
Wir bemerken dazu zunächst, dass der Vektor (l1 , l2 ) senkrecht auf der
Geraden l steht; für die nämlich (l2 , −l1 ) ein Richtungsvektor ist und
h(l1 , l2 ), (l2 , −l1 )i = 0. Da Analoges für m gilt, folgt:
∠(l, m) = ∠((l1 , l2 ), (m1 , m2 )).
Fassen wir nun den Vektor (l1 , l2 ) ∈ R2 als komplexe Zahl zl := l1 + il2 ∈ C auf,
so können wir diese auch in Polarkoordinaten schreiben:
zl = rl · eiθl .
Schreiben wir entsprechend auch (m1 , m2 ) als zm , so können wir den Winkel
zwiscehn l und m durch die beiden Winkel, die bei den beiden komplexen
Zahlen auftreten, ausdrücken:
∠(l, m) = θl − θm .
Um diese Differenz auszurechnen, betrachten wir zunächst
zl
rl i(θl −θm
=
·e
).
zm
rm
Da uns hierbei immer noch der Vorfaktor stört, benutzen wir außerdem die
Komplex–Konjugierten zl = rl · e−iθl und zm :
rl rl i(2θl −2θm )
zl zl
=
:
:
·e
= e2i(θl −θm ) .
zm zm
rm rm
Mit Hilfe des Logarithmus erhalten wir schließlich den gesuchten Winkel:
∠(l, m) = θl − θm =
zl zl
1
:
ln(
).
2i
zm zm
4.3.2 Laguerres Formel zur Winkel–Berechnung
Zwar haben wir im letzten Abschnitt die Winkel–Berechnung auf einfache Berechnungen mit komplexen Zahlen zurückgeführt, doch es ist sogar möglich,
das gleiche Ergebnis mit geometrischen Operationen zu erhalten.
Wir verwenden dazu die beiden Kreispunkten (s. Aufg. 23), also jene beiden
Punkte, die auf jedem Kreis liegen,
I = (0 : i : −1) = (0 : −1 : −i),
J = (0 : i : 1) = (0 : −1 : i),
und die unendlich ferne Gerade bzgl. der Standard–Einbettung: l∞ = (1 : 0 :
0), auf der I und J liegen.
— Version vom: 16. September 2008 —
104
4 Projektive Kegelschnitte
Zunächst berechnen wir den Schnittpunkt L∞ = l ∩ l∞ ; aus der Aufgabe 22
wissen wir, dass wir diesen leicht mit Hilfe des Kreuzproduktes erhalten:
L∞ = l × l∞ = (0 : −l2 : l1 ).
Unter Benutzung der ersten und zweiten Koordinate von L∞ , I und J können
wir nun die komplexen Zahlen zl und zl ausdrücken:
!
!
−l2 l1
−l2 l1
.
zl = l1 + il2 = det
, zl = l1 − il2 = det
−1 i
−1 −i
Damit können wir den Winkel zwischen den Geraden l und m mit Hilfe
eines Doppelverhältnisses vierer Punkte auf der unendlich fernen Geraden
l∞ ausdrücken:
1 zl zl 1
= ln(DVl∞ (L∞ , M∞ ; I, J))
∠(l, m) = θl − θm = ln
:
2i
zm zm
2i
Dies ist die Formel von Laguerre1 , die dieser bereits im Alter von 19 Jahren
gefunden hat. Eine der vielen Errungenschaften Felix Kleins ist die Verallgemeinerung dieses Resultats, die wir im den folgenden Abschnitten erläutern.
4.3.3 Abstände und Winkel nach Cayley–Klein
Wir fixieren zunächst einen Kegelschnitt C, genannt Fundamentalgebilde,
und sein Dual C∗ , sowie zwei Normierungskonstanten cdist , cang ∈ C, die die
Rolle des Faktors 2i1 in Laguerres Formel übernehmen werden. Abstand und
Winkel werden nach Cayley–Klein dann wie folgt definiert:
Abstandsmessung
Seien P, Q ∈ P2 (R) zwei Punkte. Im Normalfall schneidet die Gerade l :=
PQ den Kegelschnitt C in genau zwei Punkten X, Y. Dann können wir, da
P, Q; X, Y ∈ l, setzen:
d(P, Q) := cdist · ln(DV(P, Q; X, Y)).
Winkelmessung
Seien l, m ⊂ P2 (R) zwei Geraden und P := l ∩ m deren Schnittpunkt. Im
Normalfall gibt es dann von P an den dualen Kegelschnitt C∗ genau zwei
Tangenten x, y. Da dann alle vier Geraden l, m, x, y durch P gehen, können
wir definieren:
∠(l, m) := cang · ln(DV(l, m; x, y)).
1
Laguerre: 1834–1886
— Version vom: 16. September 2008 —
4.3 Cayley–Klein–Geometrien
105
4.3.4 Euklidische Geometrie als Cayley–Klein–Geometrie
Wir werden nun sehen, wie wir das Fundamentalgebilde wählen müssen, um
die Formel von Laguerre über den euklidischen Winkel aus dem allgemeinen
Zugang nach Cayley–Klein zu erhalten. Dabei werden wir sehen, dass wir
leider mit Dualen glatter Kegelschnitte, wie wir sie im letzten Abschnitt
eingeführt haben, nicht auskommen. Die Abstandsberechnung ist dabei noch
etwas trickreicher und wir führen sie daher nicht im Details aus.
Als Fundamentalgebilde wählen wir den entarteten Kegelschnitt C : X02 = 0,
also die doppelte unendlich ferne Gerade l∞ bzgl. der Standard–Einbettung.
Da wir daraus den dualen Kegelschnitt C∗ nicht mit unserer Formel über die
inverse der beschreibenden Matrix nicht bestimmen können, betrachten wir
C als Grenzfall einer Familie von glatten Kegelschnitten.
Wir beginnen also mit
1 0 0
Cε : Xt MX = 0, M = 0 ε 0 ;
00ε
offenbar entsteht C = limε→0 Cε tatsächlich als Grenzfall. Den glatten Kegelschnitt Cε können wir gemäß Definition 4.15 dualisieren und erhalten:
ε 0 0
1
C∗ε : Xt M−1 X = 0, M−1 = 2 0 1 0 .
ε 0 0 1
Da konstante Faktoren wie ε12 für den Kegelschnitt nicht relevant sind, können
wir statt M−1 auch M∗ := det(M)·M−1 verwenden:
ε 0 0
0 1 0
∗
t ∗
∗
Cε : X Mε X = 0, Mε =
.
001
Damit erhalten wir als Grenzfall:
d.h. C∗ : X12 + X22 = 0.
0 0 0
C∗ : Xt M∗ X = 0, M∗ = 0 1 0 ,
001
Dies sind die beiden Geraden X1 ± iX2 = 0 bzw. (0 : ±i : 1, die, da wir hier ja
in der dualen Ebene Arbeiten, duale Punkte I = (0 : i : 1) bzw. J = (0 : −i : 1)
sind, und zwar gerade die beiden Kreispunkte. Die beiden Tangenten durch
einen gegebenen Punkt an dieses duale Fundamentalgebilde, das aus den
zwei Punkten I und J besteht, sind dann natürlich die beiden Geraden durch
diese beiden Punkte. Somit erhalten wir tatsächlich Laguerres Formel als
Spezialfall der Cayley–Klein–Formeln.
— Version vom: 16. September 2008 —
106
4 Projektive Kegelschnitte
4.3.5 Andere Geometrien
elliptische Geometrie
...
hyperbolische Geometrie
bis hier nicht im Barth–Skript
——
...
4.4 Parametrisierung glatter Kegelschnitte
21. Vorl. — 07. Juli ’08
Parametrisierung glatter Kegelschnitte
Geraden in der projektiven Ebene kann man implizit durch eine Gleichung
l : l0 X0 + l1 X1 + l2 X2 = 0 oder auch explizit durch eine Parametrisierung
(λ : µ) 7→ (a(λ : µ) : b(λ : µ) : c(λ : µ)) ∈ l
mit homogenen Polynomen a, b, c angeben. Häufig war diese parametrisierte Form schon hilfreich, insbesondere, wenn wir Schnittpunkte von Geraden mit Kegelschnitten berechnen möchten, können wir dann einfach die
Koordinaten eines allgemeinen Punktes der Geraden in die Gleichung des
Kegelschnittes einsetzen.
Es wird sich herausstellen, dass glatte Kegelschnitte auch parametrisiert werden können und dass dies genauso hilfreich ist, um mit diesen Objekten
umzugehen.
4.4.1 Stereographische Projektion
Projektion des Einheitskreises
Wir beginnen mit der vermutlich bereits aus anderen Vorlesungen bekannten
Abbildung, der sogenannten stereographischen Projektion des Einheitskreises K : x2 + y2 = 1 auf die x–Achse im R2 .
Ist P = (0, 1) der sogenannte Nordpol des Kreises, U = (u, 0) ein Punkt auf
der x–Achse und lU := PU die Verbindungsgerade dieser beiden Punkte, so
ist
(
{y = 1},
u = 0,
lU =
1
{y = − u x + 1}, u , 0.
Für die Schnittpunkte lU ∩ K erhalten wir für u , 0 die Bedingung:
x2 + (1 −
x 2
x x2
) = 1 ⇐⇒ x2 + 1 − 2 + 2 = 1
u
u u
2
2u
⇐⇒ x =
= 2
.
1
u(1 + u2 ) u + 1
— Version vom: 16. September 2008 —
4.4 Parametrisierung glatter Kegelschnitte
107
Durch Einsetzen in die Gleichung von lU erhalten wir damit eine injektive
Abbildung K → K, die für jeden Punkt u ∈ K einen Punkt auf dem Kreis
liefert:
2u u2 − 1 ϕ : K → K, u 7→ lU ∩ K = 2
,
.
(4.3)
u + 1 u2 + 1
Setzen wir dies fort zu u = ∞, so ergibt sich der Punkt P = (0, 1) und die
Abbildung wird sogar bijektiv K ∪ {∞} → K.
Projektion eines allgemeinen Kegelschnitts
Eine analoge Projektionsabbildung können wir auch für einen projektiven
Kegelschnitt durchführen. Um hierbei möglichst einfach Gleichungen zu erhalten, verwenden wir, dass jeder glatte komplexe Kegelschnitt projektiv
äquivalent zu
K : X0 X1 − X22 = 0
(projektiver Abschluss der Parabel X1 = X22 ist.
Offenbar liegt der Punkt P = (1 : 0 : 0) ∈ K auf diesem Kegelschnitt. Wir müssen nun eine Gerade l auswählen, die hier die Rolle der x–Achse übernimmt;
wir nehmen l = {X0 = 0} = (1 : 0 : 0). Ist (0 : µ : λ) ∈ l ein Punkt auf dieser
Geraden, so ist dessen Verbindungsgerade mit dem Punkt P gegeben durch
(dies kann man sehr leicht an der Definition sehen oder mit der Aufgabe
22 errechnen): lµ,λ = (0 : −λ : µ). Eine Parametrisierung dieser Geraden ist
offenbar:
{∞} ∪ K ∋ s 7→ (s : µ : λ) ∈ lµ,λ ,
wobei s = ∞ (bzw. µ = 0) den Punkt P liefert. Die Schnittpunkte dieser
Geraden mit dem Kegelschnitt K berechnen wir durch Einsetzen dieser Para2
metrisierung in die Gleichung von K im Fall µ , 0: sµ − λ2 = 0, also s = λµ
und somit:
n λ2
o n
o
lµ,λ ∩ K = P,
: µ : λ = P, (λ2 : µ2 : λµ) .
µ
Dies ist auch für µ = 0 korrekt und liefert nur den Punkt P (doppelt). Wir
erhalten damit die bijektive Abbildung:
P1 (K) → K, (λ : µ) 7→ (λ2 : µ2 : λµ).
(4.4)
Definition 4.19. Eine Parametrisierung eines glatten Kegelschnittes K ist eine
bijektive Abbildung
P1 (K) → K, (λ : µ) 7→ (a(λ, µ) : b(λ, µ) : c(λ, µ))
mit homogenen Polynomen a, b, c in λ, µ vom Grad 2.
— Version vom: 16. September 2008 —
108
4 Projektive Kegelschnitte
Beispiel 4.20. Die projektive Parametrisierung des projektiven Abschlusses
des Einheitskreises erhalten wir aus der affinen Parametrisierung (4.3) durch
Homogenisiseren mit einer neuen Variablen v:
(v : u) 7→ 1 :
Den Abschnitt im Barth–Skript S. 124
über Problem der graphischen Datenverarbeitung (Bézier Kurven) haben wir
weggelassen!
2uv
u2 − v2 :
= (u2 + v2 : 2uv : u2 − v2 ).
u2 + v2 u2 + v2
Tatsächlich erhalten wir für v = 1 wieder die affine Parametrisierung zurück
und für ∞ = (0 : 1) ergibt sich: (1 : 0 : 1), was für v = 1 den Punkt P = (0, 1)
liefert.
⊔
⊓
4.4.2 Die Kanonische Parametrisierung
Im vorigen Abschnitt mussten wir, um einen Kegelschnitt K zu parametrisieren, zunächst einen Punkt P ∈ K und außerdem eine Gerade l = P wählen. Die
zweite Wahl können wir umgehen, indem wir l durch die projektive Gerade
ersetzen, die durch das Geradenbüschel P∗ der Geraden durch P gegeben ist.
Wir erhalten damit eine bijektive Abbildung:
P , Q ∈ K 7→ PQ ∈ P∗ , P 7→ TP (K),
die für jeden Punkt auf K eine Gerade des Geradenbüschels P∗ liefert und
deren Umkehrung eine Parametrisierung des Kegelschnittes darstellt. Dafür
ist nun keine Wahl einer Geraden l mehr nötig, sondern die Gerade ist durch
P schon festgelegt. Diese Parametrisierung bekommt daher einen eigenen
Namen:
Definition 4.21. Sei K ein glatter Kegelschnitt und P ∈ K ein Punkt. Die Parametrisierung
P1 (K) = P∗ → K, PQ 7→ Q,
heißt kanonische Parametrisierung von K.
Eine solche Parametrisierung erlaubt es uns, Kegelschnitte in mancher Hinsicht als Geraden betrachten zu können. Zwar liefert jeder andere Punkt des
Kegelschnittes eine andere Parametrisierung, doch diese unterscheidet sich
von der vorigen nur durch eine Projektivität, wie wir jetzt zeigen:
Satz 4.22. Seien K ein glatter Kegelschnitt und P , Q ∈ K zwei Punkte darauf. Die
Abbildung
F : P∗ → Q∗ , PR 7→ RQ,
ist eine Projektivität.
Details im Skript von
Barth S. 125
Beweis. Wir wählen Koordinaten, so dass P = (1 : 0 : 0), Q = (0 : 1 : 0),
Z := TP (K) ∩ TQ (K) = (0 : 0 : 1) und der Punkt (1 : 1 : 1) ∈ K auf dem
Kegelschnitt liegt. Dies ist wegen des Prinzips der projektiven Ausdehnung
möglich. Nachrechnen zeigt dann die Behauptung.
⊔
⊓
— Version vom: 16. September 2008 —
4.4 Parametrisierung glatter Kegelschnitte
109
4.4.3 Das Doppelverhältnis auf glatten Kegelschnitten
Da wir eben gesehen haben, dass ein glatter Kegelschnitt K sich nicht sehr
stark von der projektiven Geraden P1 (K) unterscheidet, da es zumindest eine
Bijektion ϕ : P1 (K) → K, die durch die Parametrisierung des Kegelschnittes
gegenen ist, gibt, können wir hoffen, dass man auch für vier Punkte eines Kegelschnittes ein Doppelverhältnis definieren kann. Dies ist tatsächlich möglich, wie das folgende Resultat zeigt.
Später werden wir sehen, dass wir diese Variante des Doppelverhältnisses
verwenden können, um ganz analog zur linearen projektiven Geometrie analoge Ergebnisse zum Achsensatz und zum Satz von Pappos nun für Kegelschnitte zu beweisen.
Korollar/Definition 4.23 (Satz von Chasles). Seien K ein glatter Kegelschnitt
und X0 , X1 , X2 , X3 ∈ K vier Punkte, von denen nicht mehr als zwei übereinander
fallen. K sei parametrisiert durch die Geraden eines Büschels P∗ durch P ∈ K. Dann
setzen wir:
DV(X0 , X1 ; X2 , X3 ) := DV(PX0 , PX1 ; PX2 , PX3 ).
Diese Definition ist unabhängig vom gewählten Punkt P, d.h. für jeden anderen
Punkt Q ∈ K gilt: DV(QX0 , QX1 ; QX2 , QX3 ) = DV(PX0 , PX1 ; PX2 , PX3 ).
Beweis. Dies folgt direkt aus dem obigen Satz 4.22.
⊔
⊓
Die Umkehrung dieses Satzes gilt auch:
Satz 4.24 (Steinersche Erzeugung eines Kegelschnittes). Seien P∗ = {λl+ µm}
und Q∗ = {λ′ l′ + µ′ m′ } zwei verschiedene Geradenbüschel im P2 (K) und
F : P∗ → Q∗ , (λ : µ) 7→ F(λ : µ) = (λ′ : µ′ )
eine Projektivität. Dann gilt:
1. Die Menge K := {A ∈ P2 (K) | A = l ∩ F(l) für ein l ∈ P∗ } ist ein Kegelschnitt
durch P und Q.
2. K ist entartet ⇐⇒ F(PQ) = PQ.
Beweis. Wieder erleichtert uns eine geeignete Wahl der Koordinaten die Arbeit:
1. Wir ändern die homogenen Koordinaten (λ′ : µ′ ), so dass F durch die
Identität gegeben ist: F(λ : µ) = (λ : µ). Dann ist A ∈ {λl + µm} ∩ λl′ + µm′ }
äquivalent dazu, dass das homogene Gleichungssystem
λl(A) + µ′ (A) = 0,
λl′ (A) + µm′ (A) = 0,
— Version vom: 16. September 2008 —
110
4 Projektive Kegelschnitte
eine nicht–triviale Lösung (λ : µ) hat. Dies ist aber äquivalent dazu,
dass die Determinante des Systems verschwindet, dass also l(A)m′ (A) −
m(A)l′ (A) = 0 ist. Daher liefert die Funktion
q(X) := l(X)m′ (X) − m(X)l′ (X)
Details im Skript von
Barth S. 126
Details im Skript von
Barth S. 127
die Menge K: K = {q(X) = 0}. Außerdem ist K nun offenbar ein Kegelschnitt, weil q(X) ein homogenes Polynom vom Grad 2 ist. Des Weiteren
liegt der Punkt P (und analog Q) darauf, weil P = l(X) ∩m(X), d.h. l(P) = 0
und m(P) = 0 und daher q(P) = 0.
2. Ist PQ = F(PQ), so wählen wir Koordinaten, so dass l = l′ . Dann spaltet
q(X) = l(X) · (m(X) − m′ (X)) in zwei Geraden.
Spaltet der Kegelschnitt umgekehrt eine Gerade n(X) ab, so. . .
⊔
⊓
Durch Dualisieren der obigen Resultate erhalten wir unmittelbar die folgenden beiden Ergebnisse:
Korollar 4.25 (Dual zur Parametrisierung von Kegelschnitten). Die Gerade t
sei Tangente an einen nicht–entarteten Kegelschnitt K. Dann ist die Abbildung
K ∋ X 7→ TX (K) 7→ TX (K) ∩ t ∈ t
bijektiv. Sind t, t′ verschiedene Tangenten an K, so ist die Zusammensetzung der
entsprechenden Abbildungen t → K → t′ eine Projektivität.
Korollar 4.26 (Dual zur Steinerschen Erzeugung von Kegelschnitten). Sei
F : t → t′ eine Projektivität zwischen zwei Geraden t , t′ ⊂ P2 (K) mit F(t ∩ t′ ) ,
t ∩ t′ . Dann ist {AF(A) | A ∈ t} ein dualer Kegelschnitt, der t, t′ enthält. D.h.:
Es existiert ein nicht–entarteter Kegelschnitt, der die Verbindungs–Geraden AF(A)
berührt.
Aus diesem dualisierten Satz können wir nun einen recht speziell wirkenden
Satz folgern, der allerdings beim späteren Beweis des Satzes von Poncelet
eine zentrale Rolle spielen wird:
Korollar 4.27 (Zwei Dreiecke im Kegelschnitt). Ein nicht–entarteter Kegelschnitt K enthalte die Ecken zweier Dreiecke ABC und A′ B′ C′ . Dann existiert ein
nicht–entarteter Kegelschnitt L, der die sechs Seiten der Dreiecke berührt.
Beweis. Wir schreiben: l = BC, l′ = B′ C′ . Unter der Projektivität F : l → l′ , die
durch Hintereinanderausführung
l → (A′ )∗ → K → A∗ → l′
— Version vom: 16. September 2008 —
4.4 Parametrisierung glatter Kegelschnitte
111
vierer Projektivitäten gegeben ist, werden B, C, P := A′ B′ ∩ l, Q := A′ C′ ∩ l
folgendermaßen abgebildet:
B 7→ A′ B
C 7→ A′ C
P 7→ A′ P
Q 7→ A′ Q
7 B
→
7→ C
7→ B′
7→ C′
7 AB
→
7→ AC
7→ AB′
7→ AC′
7 P′ ,
→
7→ Q′ ,
7→ B′ ,
7→ C′ ,
wobei wir mit P′ = AB ∩ l′ und Q′ = AC ∩ l′ bezeichnen.
Mit dem Dual zur Steinerschen Erzeugung 4.25 existiert ein nicht–entarteter
Kegelschnitt, der die vier Verbindungsgeraden BP′ = BF(B), CQ′ = CF(Q),
PB′ = PF(P), QC′ = QF(Q) und l, l′ berührt.
⊔
⊓
Da wir sie für den Beweis des Achsensatzes für Kegelschnitte benötigen, geben wir nun noch einige konkrete Formeln für die Koordinaten des Schnittpunkts der Verbindungsgerade zweier Punkte P1 , P2 auf einem Kegelschnitt
mit einer anderen Geraden l für zwei spezielle Geraden l an. Dabei verwenden wir für P1 und P2 die Koordinaten, die sich aus der Parametrisierung des
Kegelschnittes ergeben:
22. Vorl. — 08. Juli ’08
Proj. auf KS, Sätze v.
Pascal, Brianchon, Poncelet
Satz 4.28 (Kollinearitätskriterium für Kegelschnitte). Auf dem nicht–
entarteten Kegelschnitt K : X0 X1 = X22 seien die folgenden zwei Punkte gegeben
(Abb. 4.3):
P1 = (λ21 : µ21 : λ1 µ1 ) , P2 = (λ22 : µ22 : λ2 µ2 ).
1. Auf der Geraden l : X2 = 0, die K in A = (1 : 0 : 0) und B = (0 : 1 : 0) schneidet,
ist der Punkt
µ1 µ2
Ql := (λ1 λ2 : −µ1 µ2 : 0) = (−1 :
: 0)
λ1 λ2
mit P1 und P2 kollinear.
2. Auf der Geraden m : X0 = 0, die K in B berührt, ist der Punkt
µ1 µ2
+
: 1)
Qm := (0 : λ1 µ2 + λ2 µ1 : λ1 λ2 ) = (0 :
λ1 λ2
mit P1 und P2 kollinear.
Problem:
Skizze fehlt:
fig:KollKritKS!
Beweis. Wir geben die Linearkombinationen direkt an:
λ2 µ2 P1 − λ1 µ1 P2 = (λ2 µ2 λ21 − λ1 µ1 λ22 : λ2 µ2 µ21 − λ1 µ1 µ22 : 0)
= (λ1 λ2 (λ1 µ2 − λ2 µ1 ) : µ1 µ2 (λ2 µ1 − λ1 µ2 ) : 0)
λ22 P1
−
λ21 P2
= Ql ,
= (0 : λ22 µ21 − λ21 µ22 : λ22 λ1 µ1 − λ21 λ2 µ2 )
= (0 : (λ2 µ1 + λ1 µ2 )(λ2 µ1 − λ1 µ2 ) : λ1 λ2 (λ2 µ1 − λ1 µ2 ))
= Qm .
⊔
⊓
— Version vom: 16. September 2008 —
112
4 Projektive Kegelschnitte
fig:KollKritKS
Abbildung 4.3. SKIZZE fig:KollKritKS FEHLT!
Den Abschnitt im Barth–Skript S. 129–
130 über Kollinearitätskriterium als eine Art von Menelaos–Satz am Kegelschnitt haben wir weggelassen!
Man kann dieses Resultat als eine Variante des Satzes von Menelaos für
Kegelschnitte ansehen; siehe dazu S. 129–130 im Barth–Skript.
4.5 Projektivitäten auf glatten Kegelschnitten
Da wir einen glatten Kegelschnitt K vermöge einer Parametrisierung ϕ, wie
im vorigen Abschnitt konstruiert, als projektive Gerade P1 (K) auffassen können, liefert jede Projektivität P′ : P1 (K) → P1 (K) eine Projektivität:
ϕ−1
P′
ϕ
P : K → P1 (K) → P1 (K) → K.
In diesem Abschnitt studieren wir solche Abbildungen und beweisen mit
deren Hilfe den Satz von Pascal und einige seiner Verwandten.
4.5.1 Erste Eigenschaften von Projektivitäten auf Kegelschnitten
Details im Skript von
Barth S. 131
...
Satz 4.29 (Projektivitäten auf Kegelschnitten). Sei K ⊂ P2 (K) ein nicht–
entarteter Kegelschnitt.
1. Jede Projektivität p : K → K wird durch eine Projektivität P : P2 (K) → P2 (K)
induziert.
Details im Skript von
Barth S. 131–132
2. Die Projektivität P ist eindeutig, falls K = C.
Beweis.
⊔
⊓
Den Abschnitt im Barth–Skript S. 132
über Involutionen auf Kegelschnitten,
Konjugierte Geraden haben wir weggelassen!
— Version vom: 16. September 2008 —
4.5 Projektivitäten auf glatten Kegelschnitten
113
4.5.2 Die Achse einer Projektivität auf einem Kegelschnitt
...
Details im Skript von
Barth S. 133
Definition 4.30. Die Achse der Projektivität p : K → K ⊂ P2 (C) eines glatten
komplexen Kegelschnittes ist
1. die Verbindungsgerade der beiden Fixpunkte der Projektivität, falls p genau zwei
Fixpunkte hat (s. Aufgabe 25),
2. die Tangente in dem Fixpunkt an K, falls p genau einen Fixpunkt hat.
Bemerkung/Definition 4.31. Über den reellen Zahlen. . .
Details im Skript von
Barth S. 133
Satz 4.32 (Achsensatz für Kegelschnitte). Sei id , p : K → K eine Projektivität auf einem nicht–entarteten Kegelschnitt K ⊂ P2 (C). Dann gilt für je zwei
Punkte P1 , P2 mit P1 , p(P2 ), p−1 (P2 ), die keine Fixpunkte sind, dass sich die
Verbindungsgeraden P1 p(P2 ) und P2 p(P1 ) auf der Achse von p treffen.
Beweis. 4.28
⊔
⊓
Details im Skript von
Barth S. 133–134
4.5.3 Der Satz von Pascal
Schließlich können wir den Satz von Pascal beweisen, der eine Verallgemeinerung des Satzes von Pappos darstellt und der oft als der schönste Satz der
elementaren projektiven Geometrie bezeichnet wird:
Korollar 4.33 (Satz von Pascal, Hexagramma mysticum). Es seien A1 , A2 , A3
und B1 , B2 , B3 sechs verschiedene Punkte auf dem nicht–entarteten Kegelschnitt K.
Dann liegen die drei Schnittpunkte
A1 B 2 ∩ A2 B 1 , A2 B 3 ∩ A3 B 2 , A3 B 1 ∩ A1 B 3
auf einer Geraden, der sogenannten Pascal–Geraden (Abb. 4.4).
Beweis. Nach dem Prinzip der projektiven Ausdehnung gibt es eine Projektivität p : K → K mit p(Ai ) = Bi , i = 1, 2, 3,. Die Pascal–Gerade ist die Achse
dieser Projektivität.
⊔
⊓
Es fällt auf, dass dieser Beweis identisch zum Beweis des Satzes von Pappos
geführt wurde. Dies zeigt ein weiteres Mal, wie perfekt sich die Geometrie
der Kegelschnitte in die Geometrie der Geraden einfügt. Dual zu diesem Satz
ist folgender:
— Version vom: 16. September 2008 —
Problem:
Skizze fehlt:
fig:Pascal!
114
4 Projektive Kegelschnitte
fig:Pascal
Abbildung 4.4. SKIZZE fig:Pascal FEHLT!
fig:Brianchon
Abbildung 4.5. SKIZZE fig:Brianchon FEHLT!
Korollar 4.34 (Satz von Brianchon). Seien s1 , s2 , s3 und t1 , t2 , t3 ∈ K∗ sechs verschiedene Tangenten an den nicht–entarteten Kegelschnitt K. Dann gehen die drei
Verbindungsgeraden der Punktepaare
(s1 ∩ t2 , s2 ∩ t1 ), (s2 ∩ t3 , s3 ∩ t2 ), (s3 ∩ t1 , s1 ∩ t3 )
Problem:
Skizze fehlt:
fig:Brianchon!
durch einen Punkt (Abb. 4.5).
Man kann über den Satz von Pascal noch sehr viel mehr sagen, beispielsweise
über das Verhalten der Pascalgeraden unter Permutationen der sechs Punkte,
über Mischformen von Pascals und Brianchons Satz oder über Varianten, bei
denen manche Punkte zusammen fallen dürfen. Barth geht auf einige dieser
möglichen Vertiefungsrichtungen ein (s. Seite 135, 136–139) im Skript. Wir
möchten uns hier auf einige wenige Folgerungen beschränken. Eine erste ist
die folgende:
Korollar 4.35 (Satz über fünf Punkte auf einem Kegelschnitt). Ein nicht–
entarteter Kegelschnitt ist durch fünf seiner Punkte eindeutig festgelegt.
Details im Skript von
Barth S. 136
——
ab hier nicht in Vorlesung vorgeführt
Beweis. mit dem Satz 4.33 von Pascal
⊔
⊓
Auch die Umkehrung des Satzes von Pascal kann man mit dem Satz von
Pascal beweisen:
— Version vom: 16. September 2008 —
4.5 Projektivitäten auf glatten Kegelschnitten
115
Satz 4.36 (Umkehrung des Satzes von Pascal). Seien sechs Punkte
A1 , A2 , A3 , B1 , B2 , B3 ∈ P2 (K) gegeben, so dass keine drei kollinear sind, die drei
Schnittpunkte
A1 B 2 ∩ A2 B 1 , A2 B 3 ∩ A3 B 2 , A3 B 1 ∩ A1 B 3
aber auf einer gemeinsamen Geraden l liegen, . Dann gibt es einen Kegelschnitt K,
der durch diese sechs Punkte A1 , . . . , B3 geht.
Beweis. Nach dem Satz 4.35 über fünf Punkte gibt es einen Kegelschnitt K,
der durch die fünf Punkte A1 , . . . , B2 gibt. K schneidet die Gerade A1 B3 in A1
und einem weiteren Punkt B′3 . Zu den sechs Punkten A1 , . . . , B2 , B′3 ∈ K gibt
es eine Pascal–Gerade m, auf der die drei Schnittpunkte
A1 B2 ∩ A2 B1 , A2 B′3 ∩ A3 B2 , A3 B1 ∩ A1 B′3
liegen. Weil aber A1 B′3 = A1 B3 ist, liegen der erste und der dritte dieser
Schnittpunkte auf der Geraden l. Also: m = l. Weil aber A2 B′3 die Gerade A2 B3
auf l schneidet, gilt auch: A2 B′3 = A2 B3 und dahar:
B′3 = A2 B′3 ∩ A1 B′3 = A2 B3 ∩ A1 B3 = B3 .
⊔
⊓
4.5.4 Der Satz von Poncelet
Dual zum Satz 4.35 über fünf Punkte ist:
Korollar 4.37 (Satz über fünf Geraden). Seien l1 , . . . , l5 ⊂ P2 (K) fünf Geraden,
von denen keine drei durch einen gemeinsamen Punkt gehen. Dann gibt es genau
einen nicht–entarteten Kegelschnitt K, der diese fünf Geraden berührt.
Damit zeigen wir den schon erwähnten Satz von Poncelet:
Satz 4.38 (Satz von Poncelet, Porismus von Poncelet, 1822). Das Dreieck
A1 A2 A3 sei einem nicht–entarteten Kegelschnitt K ⊂ P2 (K) einbeschrieben und
dem nicht–entarteten Kegelschnitt L umbeschrieben. Dann gibt es nicht nur ein
einziges solches Dreieck, sondern zu jedem Punkt B1 ∈ K mit
1. B1 < K ∩ L,
2. B1 nicht auf einer gemeinsamen Tangenten von K und L,
zwei Punkte B2 , B3 ∈ K, so dass das K einbeschriebene Dreieck B1 B2 B3 dem Kegelschnitt L umbeschrieben ist.
— Version vom: 16. September 2008 —
bis hier nicht in Vorlesung vorgeführt
——
116
4 Projektive Kegelschnitte
Beweis. Sei B1 , A1 , A2 , A3 ein Punkt auf K mit B1 < K ∩ L. Dann gibt es
durch B1 zwei Tangenten an L. Berührt keine davon K, so hat jede noch
einen weiteren Schnittpunkt mit K. Wir nennen diese Punkte B2 und B3 .
Die beiden Dreiecke A1 A2 A3 und B1 B2 B3 sind offenbar dem Kegelschnitt K
einbeschrieben. Nach dem Korollar 4.27 über zwei Dreiecke im Kegelschnitt
gibt es einen nicht–entarteten Kegelschnitt L′ , der alle sechs Seiten beider
Dreiecke berührt. Fünf davon berührt schon der Kegelschnitt L. Wegen der
Eindeutigkeit im Satz 4.37 über fünf Geraden folgt L = L′ , so dass L auch die
Seite B2 B3 berührt.
⊔
⊓
Zur Bedeutung des Satzes von Poncelet und seiner Geschichte gibt Barth auf
S. 147–148 seines Skriptes eine sehr schöne Zusammenfassung.
— Version vom: 16. September 2008 —
5
Automatisches Sätze–Erkennen und –Beweisen
Wir erläutern knapp eine Methode, mit der man gewisse geometrische Sätze
automatisch beweisen kann und die in C implementiert ist: das
sogenannte randomisierte Beweisen.
Zwar gibt es auch noch weitere Methoden des automatischen Beweisens,
doch möchten wir es aus Zeitmangel mit dieser bewenden lassen. Wir haben
diese ausgewählt, weil sie es ermöglicht, dass C eigenständig automatisiert geometrische Übungsaufgaben überprüfen kann, und zwar auch
direkt auf einer interaktiven Webseite, die man als Aufgabensteller sehr einfach mit C erzeugen kann.
5.1 Randomisiertes Beweisen
In diesem Abschnitt folgen wir im Wesentlichen der Dissertation [Kor99]
von U. Kortenkamp, einem der beiden Autoren von C. Allerdings
beschränken wir uns hier nur auf eine grobe Darstellung und verweisen für
Details auf die zitierte Arbeit.
5.1.1 Nullstellen und Nullpolynome
Die Basis des Randomisierten Beweisens ist die einfache Beobachtung, dass
ein univariates Polynom p(x) ∈ C[x] vom Grad d das Nullpolynom ist, falls
es nur mehr als d Nullstellen hat. Wählen wir also d + 1 zufällige Werte
x1 , . . . , xd+1 ∈ C und gilt p(xi ) = 0 ∀i = 1, 2, . . . , d+1, so folgt: p(x) = 0 ∀x. Diesen
Test können wir auch durchführen, wenn wir p gar nicht genau kennen,
sondern nur eine Black Box haben, die für eine gegebenes x feststellt, ob
p(x) = 0 ist. Wir benötigen eine Variante dieses Argumentes:
23. Vorl. — 14. Juli ’08
Autom. Beweisen und
Erkennen, Konstruierbarkeit
118
5 Automatisches Sätze–Erkennen und –Beweisen
Lemma 5.1. Sei f ∈ C[x] ein univariates Polynom vom Grad ≤ d und sei außerdem
∅ , S ⊂ C eine endliche Teilmenge. Wählen wir r Werte gleichmäßig zufällig verteilt
aus S, so ergibt sich die folgende Wahrscheinlichkeitsabschätzung:
P( f (r) = 0 | f . 0) ≤
d
.
|S|
Beweis. f hat höchstens d Nullstellen, was wir durch die Anzahl der möglichen Werte von r teilen müssen.
⊔
⊓
Satz 5.2 (Schwarz-Zippel). Sei f (x1 , . . . , xn ) ∈ C[x1 , . . . , xn ] ein multivariates Polynom vom Grad d und sei ∅ , S ⊂ C eine endliche Teilmenge. Sind nun r1 , . . . , rn
gleichmäßig zufällig verteilte Werte aus S, so gilt folgende Wahrscheinlichkeitsabschätzung:
d
P( f (r1 , . . . , rn ) = 0 | f . 0) ≤ .
|S|
Beweis. Induktion nach der Anzahl der Variablen; siehe z.B. [Ran95].
⊔
⊓
Damit können wir leicht ein Korollar beweisen, mit Hilfe dessen wir auch für
multivariate Polynome beweisen können, dass sie bereits das Nullpolynom
sind:
Korollar 5.3. Sei f (x1 , . . . , xn ) ∈ C[x1 , . . . , xn ] ein multivariates Polynom vom Grad
≤ d und sei ∅ , S ⊂ C eine endliche Teilmenge mit |S| > d. Falls f (r1 , . . . , rn ) =
0 ∀(r1 , . . . , rn ) ∈ Sn , dann folgt f ≡ 0.
Beweis. Nach dem Satz von Schwartz-Zippel 5.2 ist die Wahrscheinlichkeit,
d
dass f (r1 , . . . , rn ) = 0 ergibt unter der Bedingung, dass f . 0, höchstens |S|
< 1.
Aber nach Voraussetzung ist die Wahrscheinlichkeit gleich 1, so dass folgt:
f ≡ 0.
⊔
⊓
5.1.2 Automatisches Beweisen von konstruktiven Punkt/Geraden-Sätzen
Wenn wir es schaffen, eine geometrische Behauptung in eine Behauptung
umzuformulieren, dass ein gewisses Polynom das Nullpolynom ist, so haben
wir im vorigen Abschnitt eine Möglichkeit gefunden, tatsächlich automatisch
zu beweisen, dass diese Behauptung wahr ist.
In Aufgabe 22 hatten wir gesehen, dass wir mit Hilfe des Kreuzproduktes sowohl die Gleichung einer Geraden durch zwei Punkte als auch den
Schnitt zweier Geraden berechnen können. Das Skalarprodukt zwischen einem Punkt und einer Geraden wiederum verschwindet genau dann, wenn
der Punkt auf ihr liegt.
Wie wir dies ausnutzen können, um Sätze über Punkte und Geraden beweisen
zu können, zeigt das folgende triviale Beispiel:
— Version vom: 16. September 2008 —
5.1 Randomisiertes Beweisen
119
Beispiel 5.4. Sei P = (a : b : c), Q = (d : e : f ) und l = PQ die Gerade durch
die beiden Punkte. Wir möchten durch Randomisiertes Beweisen nochmals
zeigen, dass P tatsächlich auf l liegt.
Die Gerade l = (g : h : i) wird gegeben durch die projektiven Koordinaten
zu P × Q, d.h. g = b f − ce, h = cd − a f , i = ae − be. Der Punkt P liegt auf l,
falls j = (a, b, c) · (g, h, i) = 0. Ist dieses Polynom das Nullpolynom, so liegt
P = (a : b : c) für beliebige Werte für a, b, c, d, e, f immer auf der Geraden PQ.
Wir können j explizit ausschreiben:
j = a · (b f − ce) + b · (cd − a f ) + c · (ae − bd).
j hat also Grad 3. Wählen wir also S = {0, 1, 2, 3}, so ist, wie im Korollar 5.3
gefordert, |S| > 3 = d. Einsetzen aller möglichen Punkte aus S6 zeigt, dass
tatsächlich j ≡ 0. Wir rechnen hier nur einen Punkt nach:
j(0, 1, 2, 3, 0, 1) = 0 + 1 · (6 − 0) + 2 · (0 − 3) = 0.
Natürlich können wir hier in diesem einfachen Fall auch direkt j ausrechnen
und finden j ≡ 0. In komplizierteren Fällen mag das symbolische Nachrechnen aber zu zeitaufwendig sein.
⊔
⊓
Eigentlich hätten wir im Beispiel natürlich 46 = 212 = 4096 Polynomauswertungen durchführen müssen. Für kompliziertere Konstruktionen können
dies leicht zu viele Auswertungen sein, um praktikabel in Software zum Beweisen von Aussagen eingesetzt zu werden. In der Praxis reicht es aber oft
aus, keinen Beweis, sondern nur eine Aussage zu haben, die mit sehr hoher
Wahrscheinlichkeit korrekt ist. Wählen wir im Beispiel die Koordinaten der
Punkte zufällig im Bereich [−106, 106 ], so ist die Wahrscheinlichkeit für das
Nichtzutreffen der Aussage schon ≤ 23 · 10− 6 nach Einsetzen von nur einem
einzigen zufällig gewählten Punktepaar P, Q. Wiederholen wir das Experiment ein paar Mal, so wird diese Wahrscheinlichkeit schnell sehr klein. In
der Praxis wird dies meist wohl ausreichen.
Möchten wir diese Technik für andere Punkte-/Geraden-Konstruktionen einsetzen, so müssen wir, um das Korollar verwenden zu können, den Grad des
Polynomes abschätzen, das die Behauptung beschreibt. Da Kreuzprodukt
und Skalarprodukt aber explizit gegeben sind, ist diese Abschätzung nicht
schwer. Details stehen in [Kor99].
Eine wesentliche Verbesserung der Methode liefert ein Lemma, mit Hilfe dessen man die Anzahl der nötigen Überprüfungen drastisch reduzieren kann,
wenn man nicht nur eine obere Schranke für den Grad des multivariaten Polynomes, sondern genauer für jeden Grad di in der i-ten Variablen eine obere
Schranke kennt:
Lemma 5.5. Sei f (x1 , . . . , xn ) ∈ C[x1 , . . . , xn ] ein multivariates Polynom vom Grad
höchstens di in xi . Seien außerdem ∅ , Si ⊂ C endliche Teilmengen mit |Si | > di .
Falls f (r1 , . . . , rn ) = 0 ∀(r1 , . . . , rn ) ∈ S1 × · · · × Sn , so folgt: f ≡ 0.
— Version vom: 16. September 2008 —
120
5 Automatisches Sätze–Erkennen und –Beweisen
Beweis. Mit Induktion nach der Anzahl der Variablen. Die Details stehen in
[Kor99, Lemma 5.19].
⊔
⊓
Im obigen trivialen Beispiel können wir, da jede Variable in jedem Monom nur
höchstens einmal vorkommt, die zu überprüfenden Punkte von {0, 1, 2, 3}6 auf
{0, 1}6 reduzieren, d.h. von 4096 auf 64.
Mit dieser Verbesserung kann man auch nicht-triviale Sätze wirklich beweisen, wie beispielsweise den Satz von Pappos:
Beispiel 5.6. Wir beginnen mit den fünf Punkten A1 = (a : b : c), A2 = (d : e :
f ), B1 = (g : h : i), B2 = ( j : k : l), S1 = (m : n : o). Daraus lassen sich nun die
Punkte S1 = A1 B2 ∩ A2 B1 , A3 = B2 S1 ∩ A1 A2 und B3 = A2 S1 ∩ B1 B2 berechnen,
so dass wir dann auch S2 = A1 B3 ∩ A3 B1 ermitteln können. Die Koordinaten
aller Punkte Si sind gegeben als Polynome in den Variablen a, b, . . . , o, da wir
alle Berechnungen mit Hilfe des Kreuzproduktes durchführen können (siehe
Aufgabe 22).
Der Satz von Pappos gilt nun, falls S2 auf der Geraden S1 S3 liegt, falls also
gilt:
hS2 , S1 × S3 i ≡ 0.
Dies ist ein Polynom in 15 Variablen, für das wir überprüfen müssen, ob es
das Nullpolynom ist. Dies führt, wenn wir die Verbesserung aus Lemma 5.5
verwenden, auf etwa 415 ≈ 109 zu überprüfende Punkte, was problemlos von
einem Computer erledigt werden kann.
⊔
⊓
5.1.3 Bemerkungen
Abschließend möchten wir noch bemerken, dass bei der konkreten Umsetzung der obigen Methode nummerische Probleme auftreten. Diese kann man
umgehen, wenn man statt über C über einem endlichen Körper rechnet. Dann
treten selbstverständlich andere Probleme auf, die aber lösbar sind.
Die Resultate dieses Abschnittes zeigen, dass man tatsächlich, wenn man nur
eine gut gewählte Instanz (d.h. Wahl konkreter Werte für die Koordinaten
der freien Punkte etc.) einer Konstruktion wählt, die allgemein genug ist,
tatsächlich schon die Korrektheit einer Konstruktion sehr wahrscheinlich ist.
In der Praxis führt allerdings auch dies auf nummerische Probleme: Probiert
man nämlich in einem dynamischen Geometrie System ein wenig herum und
sieht, dass ein gewisser Punkt offenbar immer auf einer gewissen Geraden
liegt, so kann dies einfach nur ein visueller Eindruck sein, da ja auf dem
Bildschirm viele Punkte als der selbe Pixel angezeigt werden.
Wie schon im Beispiel oben erwähnt, kann man natürlich auch alle Sätze,
die man durch einfaches Feststellen, ob ein Polynom das Nullpolynom ist,
mittels Randomisierten Beweisens nachweisen kann, auch direkt beweisen,
— Version vom: 16. September 2008 —
5.2 Automatisches Sätze-Erkennen und interaktive Aufgaben
121
indem man in einem Computer Algebra Programm dieses Polynom, das
von vielen Variablen abhängt, einfach ausrechnet und feststellt, ob es das
Nullpolynom ist. Leider ist dies in vielen Fällen aber zu langsam; obwohl es
sich nur um die Berechnung kleiner Determinanten und ähnlichen handelt,
sind Berechnungen mit großen Polynomen nämlich sehr zeitaufwendig.
Für das Beispiel des Satzes von Pappos dauert die nötige Berechnung auf
meinem Rechner im Jahr 2007 derzeit in Maple etwa eine Sekunde, was
vielleicht noch akzeptabel wäre im laufenden Betrieb. In der Praxis ist aber
das Rechnen mit einer konkreten Instanz, also konkret gewählten zufälligen
Werten, wesentlich schneller und, wie wir oben gesehen haben, auch für die
meisten Anwendungen völlig ausreichend.
5.2 Automatisches Sätze-Erkennen und interaktive Aufgaben
Die Ausführungen der vorigen Abschnitte machen deutlich, dass man schon
durch Ausprobieren einer einzigen zufälligen Instanz einer gegebenen Konstruktion mit großer Wahrscheinlichkeit eine Aussage treffen kann.
Das kann man einsetzen, um automatisiert Behauptungen zu finden, die man
dann versuchen kann zu beweisen. Möchte man beispielsweise für einen vom
Benutzer ausgewählten Punkt nicht-triviale Inzidenzen erkennen, so muss
man nur alle freien Punkte zufällig wählen und dann feststellen, ob der ausgewählte Punkt auf einer Geraden liegt oder mit einem Punkt übereinstimmt,
von dem man es nicht schon aus der Konstruktionsbeschreibung wusste.
C benutzt diese Methode, um automatisiert Sätze zu erkennen. Dies
wiederum benutzt das Programm, um automatisiert erkennen zu können, ob
eine gestellte Konstruktions-Aufgabe korrekt gelöst wurde, auch wenn sie
nicht genau so durchgeführt wurde wie vom Aufgaben-Steller vorgesehen.
Ist beispielsweise der Mittelpunkt einer Strecke zu konstruieren, so kann der
Schüler dies auf eine beliebige Art und Weise erledigen; C wird
(zumindest im Prinzip) immer durch seine eingebauten Methoden zum automatischen Beweisen feststellen können, ob der konstruierte Punkt tatsächlich
der Mittelpunkt ist.
— Version vom: 16. September 2008 —
6
Über die Mächtigkeit Dynamischer Geometrie
Wir kehren nun wieder zu Themen der euklidischen Geometrie zurück, die
spätestens seit Euklids Elementen die Mathematiker faszinieren: Wir klären
nämlich die bereits von den Griechen vor mehr als 2000 Jahren gestellte und
erst im 19. Jahrhundert beantwortete Frage, welche Punkte in der reellen
Ebene R2 mit Hilfe von Zirkel und Lineal konstruiert werden können.
Außerdem geben wir einige Beispiele von Punkten, die so nicht konstruiert
werden können und daher bereits bei den Griechen einiges Kopfzerbrechen
hervorriefen. Manche dieser Punkte kann man aber doch konstruieren, wenn
man zusätzliche Hilfsmittel, wie z.B. gewisse ebene Kurven, erlaubt. Viele
davon kannten die Griechen bereits.
Dies zeigt eine besondere Stärke von dynamischer Geometrie Software, nämlich das Konstruieren von ebenen Kurven, die aus allen Punkten bestehen, die
durch eine Konstruktionsvorschrift in Abhängigkeit von gewissen anderen
Punkten gegeben sind, den sogenannten Ortskurven.
6.1 Konstruierbarkeit von Punkten mit Zirkel und Lineal
In diesem Abschnitt folgen wir im Wesentlichen der Darstellung in [Mar98],
kürzen aber an einigen Stellen die Beweise ab, da sie oft recht einfach selbst
zu finden sind.
Definition 6.1. Ein Punkt in R2 heißt (mit — beliebig großem — Zirkel und —
beliebig langem — Lineal) konstruierbar, falls er der letzte einer endlichen Folge
P1 , P2 , . . . , Pn ∈ R2 von Punkten ist, so dass jeder Punkt entweder in {(0, 0), (1, 0)}
enthalten ist oder auf eine der folgenden Weisen erhalten wurde:1
1
Der klassische Zirkel, mit dem die Griechen argumentieren, ist ein wenig ungewöhnlich: er kann nur an der gleichen Stelle benutzt werden, an der er aufgespannt
124
6 Über die Mächtigkeit Dynamischer Geometrie
1. als Schnittpunkt zweier Geraden, die beide durch zwei Punkte gehen, die vorher
in der Folge auftauchen,
2. als Schnittpunkt einer Geraden durch zwei Punkte, die vorher in der Folge
auftauchen, mit einem Kreis durch einen solchen Punkt und mit solch einem
Punkt als Mittelpunkt,
3. als Schnittpunkt zweier Kreise, die jeweils durch einen Punkt gehen, der vorher
in der Folge auftaucht und die beide ebenfalls einen solchen Mittelpunkt haben.
Eine konstruierbare Gerade ist eine Gerade, die durch zwei konstruierbare Punkte
geht. Entsprechend ist ein konstruierbarer Kreis ein Kreis durch einen konstruierbaren Punkt mit einem konstruierbaren Punkt als Mittelpunkt.
Wir sagen, dass x ∈ R eine konstruierbare Zahl ist, falls der Punkt (x, 0) konstruierbar ist.
Bemerkung 6.2. Es ist klar, dass die Einschränkung, dass der konstruierbare Punkt
der letzte einer endlichen Sequenz sein muss, keine Einschränkung ist. Es gilt also, dass jeder Schnittpunkt zweier konstruierbarer Geraden, zweier konstruierbarer
Kreise oder einer konstruierbarer Geraden mit einem konstruierbaren Kreis wieder
konstruierbar ist (für mehr Details siehe [Mar98, Theorem 2.2]).
Ein erster Schritt zur Beschreibung aller konstruierbarer Punkte ist das folgende Resultat:
Lemma 6.3. Die Koordinaten-Achsen sind konstruierbare Geraden. Alle Punkte
(p, 0), (−p, 0), (0, p), (0, −p) sind konstruierbar, falls nur einer davon konstruierbar
ist. Die Zahl x ∈ R ist konstruierbar genau dann, wenn −x konstruierbar ist. Alle
ganzen Zahlen sind konstruierbar. Der Punkt (p, q) ist konstruierbar genau dann,
wenn p und q konstruierbare Zahlen sind.
Beweis. Da wir Orthogonalen konstruieren können, sind die KoordinatenAchsen konstruierbar. Aus (p, 0) können wir mit dem Zirkel dann (−p, 0),
(0, p), (0, −p) als Schnittpunkte mit den Achsen konstruieren etc. Analog gilt
die Aussage über x ∈ R. Per Induktion ist die Aussage über die natürlichen
Zahlen klar, da man sich mit dem Zirkel immer um 1 weiterhangeln kann. Die
letzte Aussage erhalten wir, da wir auch in (p, 0) und (0, q) die Orthogonalen
zu den Koordinaten-Achsen ziehen können, die sich ja in (p, q) treffen und
umgekehrt.
⊔
⊓
wurde; er klappt also quasi zusammen, sobald man ihn anhebt. Allerdings kann man
recht leicht zeigen (Euklid auch schon!), dass jeder konstruierbare Punkt auch mit
diesem eingeschränkten Zirkel konstruierbar ist [Mar98, Theorem 2.3]. Er stellt also
nur eine praktische Einschränkung dar.
— Version vom: 16. September 2008 —
6.1 Konstruierbarkeit von Punkten mit Zirkel und Lineal
125
Natürlich heißt die Tatsache, dass die x-Achse konstruierbar ist, noch längst
nicht, dass jeder Punkt (x, 0), x ∈ R der x-Achse konstruierbar ist. Die konstruierbaren Punkte sind aber immerhin abgeschlossen bzgl. der arithmetischen
Operationen:
Lemma 6.4. Die konstruierbaren Punkte bilden einen Körper.
Beweis. Wir müssen nur die Operationen +, −, ·, / mit Konstruktionen realisieren können. Dies erledigen die Konstruktionen in Abb. 6.1. Für die Multiplikation und die Division verwenden wir dabei den Strahlensatz.
⊔
⊓
Abbildung 6.1. Die konstruierbaren Zahlen bilden einen Körper.
Definition 6.5. Wir√nennen einen Körper
K euklidischen Körper, falls
√ aus x ∈
√
K, x > 0 folgt, dass x ∈ K, wobei x eine Zahl ist, für die gilt, dass x2 = x ist.
Natürlich ist R ein euklidischer Körper; es gilt aber auch:
Lemma 6.6. Die konstruierbaren Punkte bilden einen euklidischen Körper.
Beweis. Dies zeigt die Konstruktion
in Abb. 6.2, da wir den Höhensatz im
√
Dreieck der Punkte (0, 1), ( c, 0), (0, −c) anwenden können.
⊓
⊔
Wesentlich für die Theorie der konstruierbaren Punkte ist die folgende Konstruktion:
√
Lemma/Definition 6.7. Ist K ⊃ Q ein Körper und d ∈ K, d > 0, aber d < K,
dann ist
√
√
K( d) := {p + q d | p, q ∈ K}
ein Körper.
√
Erweiterung von K. Sind K1 =
K( √d) ist dann eine
√ sogenannte quadratische
√
K( d1 ), K2 = K1 ( d2 ), . . . , Kn = Kn−1 ( dn ), so schreiben wir kurz
— Version vom: 16. September 2008 —
126
6 Über die Mächtigkeit Dynamischer Geometrie
Abbildung 6.2. Die konstruierbaren Punkte bilden einen euklidischen Körper.
Kn = K(d1 , d2 , . . . , dn )
und nennen jeden der Körper K, K1 , K2 , . . . , Kn eine iterierte quadratische Erweiterung von K. Mit E bezeichnen wir die Vereinigung aller iterierten quadratischen
Erweiterungen von Q.
Beweis. Sehr leicht. Man muss
nur zeigen, dass die Operationen wieder ein
√
Element der Form p + q d liefern. Dies ist analog zur Konstruktion der
komplexen Zahlen (bei der allerdings d = −1 < 0 ist).
⊔
⊓
Die Galoistheorie erklärt solche und ähnliche Konstruktionen von Erweiterungskörpern und deren Zusammenhang zu Polynomen und Gruppen sehr
detailliert. Leider können wir hier nicht weiter darauf eingehen.
Mit der obigen Definition folgt direkt mit Lemma 6.6:
Proposition 6.8. Ist x ∈ E, so ist x eine konstruierbare Zahl.
Im Rest dieses Abschnittes werden wir zeigen, dass auch die Umkehrung gilt,
dass also jede konstruierbare Zahl in einer iterierten quadratischen Erweiterung von Q liegt. Die Idee dazu ist einfach, dass beim Lösen der Gleichungen,
die beim Schnitt von Gerade mit Gerade, Gerade mit Kreis bzw. Kreis mit
Kreis, immer nur quadratische Gleichungen auftreten, die wir natürlich mit
Quadratwurzel Ziehen berechnen können.
Wer sich für die Details interessiert, kann die folgenden Lemmata entweder
selbst beweisen oder in [Mar98, Lemma 2.11–2.14] nachlesen; wir zeigen nur
das erste:
Lemma 6.9. Falls eine Gerade durch zwei Punkte geht, die Koordinaten in einem
Körper K haben, hat die Gerade eine Gleichung mit Koeffizienten in K. Haben der
Mittelpunkt eines Kreis und ein Punkt auf dem Kreis Koordinaten in K, so hat der
Kreis eine Gleichung mit Koeffizienten in K.
— Version vom: 16. September 2008 —
6.2 Ortskurven
127
Beweis. Eine Gleichung der Geraden durch (x1 , y1 ) und (x2 , y2 ) ist
(y2 − y1 )x − (x2 − x1 )y + (x2 y1 − x1 y2 ) = 0.
Der Kreis durch (s, t) mit Mittelpunkt (p, q) hat die Gleichung
(x − p)2 + (y − q)2 = (s − p)2 + (t − q)2 = 0.
Ausmultiplizieren und auf eine Seite Bringen liefert:
x2 + y2 − 2px − 2qy + s(2p − s) + t(2q − t) = 0.
Geraden- und Kreisgleichung haben also alle Koeffizienten in K.
⊔
⊓
Lemma 6.10. Haben zwei sich schneidende Geraden Gleichungen mit Koeffizienten
in einem Körper K, so hat auch deren Schnittpunkt Koordinaten in K.
Lemma 6.11. Schneiden sich eine Gerade und ein Kreis und haben beide Gleichungen mit Koeffizienten in einem Körper K, so haben auch deren Schnittpunkte Koordinaten in K oder in einer quadratischen Erweiterung von K.
Lemma 6.12. Haben zwei sich schneidende Kreise Gleichungen mit Koeffizienten in
einem Körper K ⊃ Q, so haben auch deren Schnittpunkte Koordinaten in K oder in
einer quadratischen Erweiterung von K.
Diese Lemmata liefern zusammen mit Proposition 6.8 unmittelbar den folgenden Hauptsatz:
Satz 6.13 (Hauptsatz über die Konstruierbarkeit mit Zirkel und Lineal). Ein
Punkt ist genau dann mit Zirkel und Lineal konstruierbar, wenn seine Koordinaten
in einer iterierten quadratischen Erweiterung von Q liegen.
Eine reelle Zahl x ∈ R ist konstruierbar genau dann, wenn x in einer iterierten
quadratischen Erweiterung von Q liegt.
6.2 Ortskurven
Die folgende Definition ist bewusst etwas vage gehalten:
Definition 6.14. Ist l eine Gerade in einer Ebene E (z.B. E = R2 , E = P2 (R)) und
ist eine Konstruktionsvorschrift gegeben, die einem Punkt P ∈ l einen Bildpunkt
P′ ∈ E zuordnet, so heißt der topologische Abschluss der Menge aller Bildpunkte
eine Ortskurve.
Eine Ortskurve heißt konstruierbar mit Zirkel und Lineal, falls die Konstruktionsvorschrift nur Zirkel und Lineal Konstruktionen verwendet, ausgehend von den
beiden Punkten (0, 0), (1, 0).
Analog ist konstruierbar mit Lineal definiert, allerdings ausgehend von den vier
Punkten (1, 0), (2, 0), (0, 1), (0, 2).
— Version vom: 16. September 2008 —
24. Vorl. — 15. Juli ’08
Ortskurven, Lösung
antiker Probleme der
Griechen
128
6 Über die Mächtigkeit Dynamischer Geometrie
Dazu müssen wir nämlich einiges beachten:
Bemerkung 6.15. Im Abschnitt 1.7.1 über Kontinuität und Determinismus haben
wir gesehen, dass in kontinuierlichen Systemen einem Punkt P ∈ l nicht immer der
selbe Bildpunkt zugeordnet wird, sondern dass dieser von der aktuellen Konstruktionssituation abhängt. Die Definition der Ortskurve hängt also insbesondere von der
Wahl der Dynamischen Geometrie Software ab.
Beispiel 6.16. Wir haben bereits in der Übungsstunde gesehen, dass die
Gärtner-Konstruktion der Ellipse, wenn man nur einen Punkt P auf einem
Intervall der Länge c betrachtet in EDG und GG nur die
halbe Ellipse, C aber die vollständige Ellipse zeigt. Dem kann man
nur entgegen wirken, indem man in den ersten beiden Programmen zwei
Ortskurven zeichnet, jeweils eine je Hälfte der Ellipse.
⊔
⊓
Satz/Definition 6.17 (Rational parametrisierte Kurven als Ortskurven). Jede
rational parametrisierte Kurve C ⊂ R2 , d.h. eine Kurve
n
a(t) c(t) o
C = ϕ(t) =
| t ∈ R, a, b, c, d Polynome mit Koeffizienten in Q
,
b(t) d(t)
1. ist mit Zirkel und Lineal konstruierbar,
2. alleine mit Lineal konstruierbar, falls die Punkte (0, 1), (0, 2), (1, 0), (2, 0) gegeben
sind.
Beweis.
1. Wir wissen bereits, dass jede rationale Zahl r ∈ Q konstruierbar ist und
dann, da wir multiplizieren können, auch jedes Monom r·td . Da wir addieren können, somit auch die polynomiellen Funktionen a(t), . . . , d(t).
Schließlich können wir dividieren und somit die Ortskurve konstruieren.
2. Dies können wir hier leider aus Zeitmangel nicht vorführen, obwohl es
nicht schwierig ist. In Anbetracht des Beweises von Lemma 6.4 müssen
wir nur zeigen, dass Senkrechten auf eine Gerade (und damit auch Parallelen) alleine mit Geradenkonstruktionen konstruierbar sind. Dies ist,
wenn man mit den angegebenen vier Punkten startet, tatsächlich möglich.
Siehe dazu z.B. [Mar98].
⊔
⊓
Beispiel 6.18.
1. Wir haben in Gleichung (4.3) die Parametrisierung des Kreises gefunden. Nach dem Satz können wir diesen Kreis also als Ortskurve einer
Geradenkonstruktion erhalten.
2. Natürlich gilt ein analoger Satz auch für Kurven in P2 (R) und P2 (C).
⊔
⊓
— Version vom: 16. September 2008 —
6.3 Lösung einiger unlösbarer Aufgaben mittels Ortskurven
129
6.3 Lösung einiger klassischer unlösbarer Aufgaben mittels
Ortskurven
Wir erklären nun, wie man unter Zuhilfenahme gewisser zusätzlicher Kurven
doch einige Punkte konstruieren kann, die nicht in einer iterierten quadratischen Erweiterung von Q liegen.
Unsere Beispiele sind die klassischen, die auch schon die Griechen vor mehr
als 2000 Jahren interessiert haben. Diees sind die berühmten Probleme der
Winkeldreiteilung, der Würfelverdopplung und der Quadrator des Kreises.
Der Beweis, dass diese tatsächlich nicht mit Zirkel und Lineal lösbar sind, ist
Gegenstand einer Algebra–Vorlesung, in der freilich wesentlich allgemeinere
Aussagen bewiesen werden. Die uns interessierenden Spezialfälle könnte
man auf relativ wenigen Seiten zeigen; aus Zeitmangel verweisen wir dazu
aber auf mein Vorlesungsskript [Lab08].
6.3.1 Würfelverdopplung mit der Konchoide des Nikomedes
Die klassische Aufgabe der Würfelverdopplung lautet: Ist eine Kante r eines
Würfels gegeben, so konstruiere man mit Zirkel und Lineal eine Kante der
√3
Länge r 2 eines Würfels mit doppeltem Volumen.
Es erscheint einsichtig, dass diese Zahl nicht mit Zirkel und Lineal konstru√3
ierbar ist, weil man dafür 2 konstruieren müsste und dies nicht nach einer
Zahl aussieht, die man durch iteriertes Quadratwurzel–Ziehen erhalten kann.
Wie die Griechen bereits vor etwa zwei Jahrtausenden vermuteten, kann man
dies — allerdings erst seit dem 19. Jahrhundert — auch beweisen:
Satz 6.19. Im Allgemeinen ist die Würfelverdopplung mit Zirkel und Lineal nicht
zu lösen, z.B. für einen Würfel der Kantenlänge 1.
Beweis. Wir müssen nach dem Hauptsatz
6.13 über Konstruierbarkeit mit
√3
Zirkel und Lineal zeigen, dass 2 keine iterierte Quadratwurzel ist. Dies
erscheint nicht verwunderlich und ist auch nicht allzu schwer zu zeigen,
siehe z.B. [Mar98] oder [Lab08]. Auch in vielen Algebra–Vorlesungen wird
das erklärt.
⊔
⊓
Mit einem nicht erlaubten Hilfsmittel können wir die Würfelverdopplung
aber doch realiseren, und zwar mit Hilfe einer Ortskurve, nämlich der sogenannten Konchoide des Nikomedes.
Sie ist der geometrische Ort eines Punktes, dessen Verbindungslinie mit einem festen Punkt, dem sogenannten Pol der Konchoide, durch eine feste
Gerade, die sogenannte Basis der Konchoide, so geschnitten wird, dass das
Stück zwischen Ort und Gerade eine gegebene Länge besitzt.
— Version vom: 16. September 2008 —
130
6 Über die Mächtigkeit Dynamischer Geometrie
Abbildung 6.3. Konstruktion der Konchoide.
Bezeichnen wir die gegebene feste Länge mit K und wählen wir als Basis die
vertikale Gerade x = a, so kann man zeigen, dass die Punkte der Konchoide
die Gleichung
(x2 + y2 )(x − a)2 = K2 x2
erfüllen (s. Abb. 6.3 für ein Beispiel mit a > K). Daran kann man sofort ablesen,
dass die Konchoide symmetrisch zur x-Achse ist und dass die Gerade x = a
Asymptote der Konchoide ist. Je nach Werten von a und K ergibt sich eine
der drei möglichen Formen der Konchoide (s. Abb. 6.4 für die beiden noch
nicht gezeigten Formen).
Abbildung 6.4. Weitere mögliche Formen der Konchoide; links a = K, rechts: a < K.
Zur Würfelverdopplung benutzen wir eine Konchoide mit a = K (Abb. 6.5),
wobei a = r > 0 die Länge der Kante des zu verdoppelnden Würfels ist. Wie in
Abb. 6.5 angegeben, zeichnen wir eine Gerade in U, die mit der horizontalen
einen Winkel von 60◦ einschließt. Diese Gerade schneidet den rechten Zweig
der Kurve in einem Punkt S. Bezeichnen wir den Ursprung (0, 0) mit O, so
trifft die Gerade OS die Basis der Konchoide (also die√Vertikale durch U) in
3
einem Punkt T. Wir werden zeigen, dass x := |OT| = a 2 die gesuchte Länge
der Kante des verdoppelten Würfels ist.
Dazu bemerken wir zunächst, dass nach dem Strahlensatz gilt:
x |OT| |UZ| 2a
=
=
= ,
a
|TS|
|US|
y
d.h. xy = 2a2 .
— Version vom: 16. September 2008 —
(6.1)
6.3 Lösung einiger unlösbarer Aufgaben mittels Ortskurven
131
Abbildung 6.5. Würfelverdopplung mit der Konchoide.
Die Länge |UZ| = 2a ergibt sich dabei, weil cos 60◦ =
a
gilt: cos 60◦ = |OU|
|UZ| = |UZ| .
1
2
und im Dreieck OUZ
Im rechtwinkligen Dreieck OSL (L ist konstruiert als Fußpunkt des Lots von
O auf UZ) gilt nach dem Satz von Pythagoras:
a 2
+ |OL|2 .
(x + a)2 = y +
2
Im Dreieck OLU ergibt sich entsprechend:
a2
+ |OL|2 .
4
Insgesamt erhalten wir also durch Subtraktion der beiden Gleichungen:
a2 =
a 2 a2
− ,
(x + a)2 − a2 = y +
2
4
d.h. x2 + 2ax = y2 + ay.
Setzen wir nun die aus (6.1) folgende Identität 2a =
x2 +
xy
a
(6.2)
in (6.2) ein, ergibt sich:
x2 y
x2
x2
= y2 + ay ⇐⇒
(a + y) = y(a + y) ⇐⇒ x2 = ay ⇐⇒ y = .
a
a
a
Dies können wir nun wieder in (6.2) einsetzen und x2 auf beiden Seiten der
Gleichung subtrahieren, so dass wir erhalten:
y2 = 2ax.
Einsetzen der vorigen Gleichung y =
x2
a
liefert schließlich:
√3
x4
= 2ax ⇐⇒ x = a 2.
2
a
Dies zeigt, dass die Konchoide von Nikomedes tatsächlich zur Würfelverdopplung verwendet werden kann. Aber hätten Sie, ausgehend vom Problem, den Würfel zu verdoppeln, genauso wie Nikomedes diese (oder eine
andere) Kurve gefunden, die das erlaubt?
— Version vom: 16. September 2008 —
132
6 Über die Mächtigkeit Dynamischer Geometrie
6.3.2 Winkeldreiteilung mit der Konchoide des Nikomedes
Die klassische Aufgabe der Winkeldreiteilung lautet: Sind drei Punkte ABC
gegeben, so dass ∠ABC = α, so konstruiere man (mit Zirkel und Lineal) drei
Punkte PQR, so dass ∠PQR = 31 α. Genauso wie für die Würfelverdopplung
konnte erst im 19. Jahrhundert gezeigt werden, dass diese Aufgabe tatsächlich
nicht lösbar ist:
Satz 6.20. Die Zahl cos 20◦ und daher der Winkel 20◦ sind nicht konstruierbar: Die
Aufgabe der Winkeldreiteilung ist daher im Allgemeinen nicht mit Zirkel und Lineal
lösbar, weil der Winkel 60◦ nicht zu dritteln ist.
Beweis. Man zeigt zunächst, dass der Winkel 20◦ genau dann konstruierbar
ist, wenn es die Zahl cos 20◦ ist. Dann beweist man weiter, dass diese Zahl
eine Nullstelle eines bestimmten Polynoms vom Grad 3 ist, das keine rationale Nullstelle und auch keine konstruierbare Nullstelle enthält; siehe dazu
z.B. [Mar98] oder [Lab08]. Auch dies wird in vielen Algebra–Vorlesungen
bewiesen.
⊔
⊓
Eine Methode, mit der man aber doch jeden Winkel dritteln kann, benutzt
wieder die Konchoide des Nikomedes; siehe beispielsweise [Sch49, S. 107].
Eine weitere Ortskurve, die man dazu verwenden kann und die etwas weniger kompliziert ist als die Konchoide, ist die sogenannte Trisektrix von
MacLaurin. Wir führen dies hier aber nicht vor. Siehe dazu beispielsweise
[Sch49].
6.3.3 Quadratur des Kreises mit der Quadratrix des Dinostratus
Läuft M mit konstanter Geschwindigkeit von A = (1, 0) gegen den Uhrzeigersinn auf dem Einheitskreis und L ebenso auf der Vertikalen durch O = (0, 0)
nach oben, so wird der Ort aller Punkte P, die sich als Schnittpunkt der Horizontalen durch L mit der Geraden OM ergeben, Quadratrix des Dinostratus
genannt, siehe Abb. 6.6.
Ihr Name kommt daher, dass man sie zur Lösung der Aufgabe der Quadratur
des Kreises verwenden kann: Ist der Radius r eines Kreises gegeben, so
konstruiere man eine Länge x, so dass das Quadrat mit Seitenlänge x die
Fläche des Kreises besitzt, dass also x2 = πr2 .
Die Unmöglichkeit der Lösung dieses Problems ist sogar in den allgemeinen
Sprachgebrauch übergegangen.
√ Zur Lösbarkeit dieser Aufgabe mit Zirkel
und Lineal müsste die Zahl π konstruierbar, also eine iterierte Quadratwurzel, sein. Dies ist natürlich gleichbedeutend mit der Frage, ob π selbst
eine iterierte Quadratwurzel ist. Der Deutsche Ferdinand Lindemann (1852–
1939) zeigte im Jahr 1882, dass dies nicht der Fall ist; genauer bewies er
sogar, dass π Nullstelle gar keines Polynomes mit rationalen Koeffizienten
sein kann, dass π also transzendent ist.
— Version vom: 16. September 2008 —
6.3 Lösung einiger unlösbarer Aufgaben mittels Ortskurven
133
Abbildung 6.6. Die Konstruktion der Quadratrix.
Satz 6.21. Das Problem der Quadratur des Kreises ist im Allgemeinen mit Zirkel
und Lineal nicht lösbar.
Beweis. Die Transzendenz von π wird in vielen Analysis–Vorlesungen bewiesen. Ohne einige Voraussetzungen können wir dies hier nicht einfach zeigen
und verweisen daher auf geeignete Literatur; eine Beweisidee liefert z.B.
[Lab08]. Auch in einigen Analysis–Grundvorlesungen und vielen Algebra–
Vorlesungen wird die Transzendenz von π gezeigt.
⊔
⊓
Um zu zeigen, wie man die Quadratrix aber zur Lösung dieser Aufgabe
verwenden kann, stellen wir zunächst fest, dass wegen ihrer Erzeugung die
Beziehung gilt:
⌣
AM
⌣
AB
=
|OL|
,
|OB|
⌣
wobei AB die Länges des Kreisbogens von A nach B bezeichnet etc. Sind
(r(ϕ) cos(ϕ), r(ϕ) sin(ϕ)) die Koordinaten von P = P(ϕ), so folgt sofort
ϕ
π
2
=
r(ϕ) sin(ϕ)
1
und daher:
r(ϕ) =
ϕ
2
·
.
π sin(ϕ)
Für ϕ = 0 erhalten wir durch Grenzwertbildung, da limϕ→0
r(0) =
ϕ
sin(ϕ)
= 1:
2
,
π
die Koordinaten von S := P(0) sind also: S = ( π2 , 0). Um dies für die Quadratur
des Kreises zu verwenden müssen wir nur noch den Kehrwert dieses Wertes
konstruieren. Dies ergibt sich aus dem Strahlensatz, wenn wir mit Q den
— Version vom: 16. September 2008 —
134
6 Über die Mächtigkeit Dynamischer Geometrie
Schnittpunkt der Vertikalen durch S mit dem Einheitskreis und mit E den
Schnittpunkt der Geraden OQ mit der Vertikalen durch A bezeichnen (siehe
Abb. 6.7), denn dann:
|OE|
|OA|
1·1 π
=
, d.h. |OE| = 2 = .
|OQ|
|OS|
2
π
Abbildung 6.7. Die Quadratur des Kreises mit der Quadratrix.
Wir haben insgesamt also eine Strecke der Länge π2 konstruiert, so dass wir
√
natürlich auch eine Strecke der Länge π erhalten können, die dann ein
Quadrat mit Flächeninhalt π liefert. Allerdings müssen wir dazu bemerken,
dass wir die Quadratrix selbst nicht über eine Konstruktion mit Zirkel und
Lineal erhalten haben, sondern nur über den Trick des Laufens mit gleicher
Geschwindigkeit.
Viele andere klassischen Kurven haben zwar selbst Flächeninhalte, die im
Wesentlichen die Form πr2 o.ä. haben, doch kann man meist keine Strecke der
Länge π mit ihnen konstruieren. Die Quadratrix ist hier eine der Ausnahmen.
Für eine Übersicht vieler klassischer Kurven siehe beispielsweise [Sch49] und
die sehr informative Webseite [OR07].
6.4 Ortskurven in verschiedenen dynamischen Geometrie
Programmen
Ortskurven werden in den dynamischen Geometrie Programmen, die auf
dem Markt zur Zeit verfügbar sind, in sehr unterschiedlicher Weise dargestellt. Das meiner Meinung nach einzige Programm, das dies in einer sehr
konsistenten und vollständigen Weise erledigt, ist C.
Das Problem kann man schon an der Konstruktion der Ellipse auf Basis der
Gärtner–Konstruktion (Aufgabe 20) sehen: In EDG, GG,
— Version vom: 16. September 2008 —
6.4 Ortskurven in verschiedenen Dyn. Geo. Programmen
135
C etc. muss man jeweils die Ortskurven beider möglicher Punkte, die
bei der Konstruktion entstehen können, einzeichnen lassen, um nicht nur die
halbe Ellipse zu erhalten.
C schafft es dagegen, bei der Auswahl von nur einem der beiden
Punkte die gesamte Ortskurve zu zeichnen. Dies liegt natürlich daran, dass
diese Software das Complex Tracing (Abschnitt 1.7.2) konsequent umsetzt
und den Zielpunkt so lange verfolgt, bis er wieder am Ausgangspunkt angekommen ist.
Einige Programme erlauben es, Ortskurven durch interaktives Ziehen des
freien Punktes nach und nach aufzubauen. Dies ist manchmal aus didaktischen Gründen hilfreich.
GG bietet beide Möglichkeiten — das interaktive Aufbauen einer Ortskurve und das automatische Anzeigen, EDG nur das interaktive
Aufbauen und C nur das automatische Anzeigen.
Keines dieser Programme kann die Schnittpunkte einer konstruierte Ortskurve mit einer anderen Kurve (z.B. einer Geraden, einem Kreis, einer anderen
Ortskurve) konstruieren. Dies ist insbesondere für das Nachvollziehen der im
vorigen Abschnitt vorgestellten Lösungen der klassischen unlösbaren Probleme der Griechen sehr schade. Das meines Wissens derzeit einzige Programm,
in dem man dies doch durchführen kann, ist die kostenpflichtige Software
C.
Wir sehen also, dass jede Software ihre Vor– und Nachteile hat. In Bezug
auf Ortskurven hat C beim vollständigen Einzeichnen dieser Kurve die Nase vorn, GG und C aber bei der Anzahl der nützlichen
Bedienungs–Möglichkeiten. Für die praktische Anwendung, beispielsweise
in der Schule, muss man also für jedes gegebene Problem die passende Software auswählen. In einigen Fällen mag die eine, in anderen die andere Software
die geeignetste sein. Im Netz finden sich sehr viele vorbereitete Konstruktion
zum Herunterladen; viel Spaß beim Stöbern!
— Version vom: 16. September 2008 —
A
Übungsaufgaben
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 1
24.04.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 29.04.2008 vor der Vorlesung abzugeben.
Für dieses Übungsblatt sind nur 5 Tage zur Lösung Zeit. Die Aufgaben sind so gehalten, dass dies
hoffentlich machbar ist.
Aufgabe 1 (2 Punkt(e), Orthogonale Matrizen).
Zeigen Sie:!
!
c −s
c s
U ∈ GL(2, R) ist orthogonal ⇐⇒ U =
oder U =
mit c2 + s2 = 1.
s c
s −c
Aufgabe 2 (2 Punkt(e), Bewegungen). Bestimmen Sie alle Bewegungen F : R2 → R2 mit F ◦ F = idR2 .
Aufgabe 3 (2 Punkt(e), Teilverhältnis). Zeigen Sie, dass das Teilverhältnis TV(x, u, v) folgendermaßen
von der Reihenfolge der Punkte abhängt:
•
•
•
•
•
•
x, u, v :
u, v, x :
v, x, u :
x, v, u :
u, x, v :
v, u, x :
TV
1 − 1/TV
1/(1 − TV)
1/TV
TV/(TV − 1)
1 − TV
Aufgabe 4 (2 Punkt(e), Geraden in der Ebene). Im K2 seien zwei Geraden gegeben: L mit Gleichung
ax + by = c und M, aufgespannt durch (p1 , p2 ) , (q1 , q2 ). Wann sind L, M parallel und wann gleich?
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 2
29.04.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 06.05.2008 vor der Vorlesung abzugeben.
Aufgabe 5 (2 Punkt(e), Orthogonale Projektion). Bestimmen Sie die orthogonale Projektion v0 von
w = (1, 1, 1, 1) in den affinen Unterraum
V = {(x1 , . . . , x4 ) ∈ R4 | x1 − x2 + x3 + x4 = −2, x1 + x2 − x3 + x4 = 6}
des R4 .
Aufgabe 6 (2 Punkt(e), Euklids Elemente). Finden Sie heraus (z.B. per Internet), was die erste Proposition von Euklids Elementen aussagt und geben Sie mindestens eine Lücke in Euklids Beweis dieser
Aussage an.
Aufgabe 7 (2 Punkt(e), Spiegelungen). Seien L1 = aR und L2 = bR, 0 , a, b ∈ R2 , zwei Geraden und
S1 , S2 die Spiegelungen daran. Benutzen Sie eines der dynamischen Geometrie Programme GG,
EDG oder C, um zu erraten, welche Bedingungen B1 (a, b), B2 (a, b) an a, b gestellt
werden müssen, damit gilt:
S1 S2 = S2 S1 ⇐⇒ B1 (a, b) oder B2 (a, b).
Beweisen Sie dies dann. Schicken Sie Ihre Datei an [email protected].
Aufgabe 8 (2 Punkt(e), Volumen). Seien a, b, c ∈ R2 . Wir setzen:
!
111
[a, b, c] := det
und [a, b] := det a b .
abc
Zeigen Sie:
[a, b, c] := [a, b] + [b, c] + [c, a].
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 3
06.05.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 15.05.2008 vor der Vorlesung abzugeben.
Bitte die Aufgaben dieses Blattes bis zum 15.5.2008, 13 Uhr, entweder bei mir im Zimmer oder in der
Übung abgeben oder aber notfalls unter der Tür meines Zimmers durchschieben.
Aufgabe 9 (2 Punkt(e), Eulergerade). Es seien A′ = 12 (B+C), B′ = 12 (C+A), C′ = 21 (A+B) die Seitenmitten
des Dreiecks ABC im R2 . Zeigen Sie:
1. Der Schwerpunkt S′ des Dreiecks A′ B′ C′ ist der Schwerpunkt S des Dreiecks ABC.
2. Der Höhenschnittpunkt H′ des Dreiecks A′ B′ C′ ist der Schnittpunkt M der Mittelsenkrechten des
Dreiecks ABC.
3. Die Eulergeraden der Dreiecke ABC und A′ B′ C′ stimmen überein.
Aufgabe 10 (2 Punkt(e), Vierecke). Die Seiten a, b, c, d eines Vierecks im R2 berühren in dieser Reihenfolge einen Kreis. Zeigen Sie, dass für deren Längen (hier auch mit a, b, c, d notiert) gilt:
a + c = b + d.
Aufgabe 11 (2 Punkt(e), ). Seien k1 , k2 , k3 drei Kreise im R2 , so dass sich je zwei davon in zwei verschiedenen Punkten schneiden und deren Mittelpunkte nicht auf einer Geraden liegen; für i , j seien
ki ∩ k j = {pi j , qi j }. Zeigen Sie: Die drei Geraden pi j , qi j schneiden sich in einem gemeinsamen Punkt.
Aufgabe 12 (2 Punkt(e), Berührende Kreise). Mit den Ecken A, B, C eines Dreiecks als Mittelpunkte
werden drei Kreise gezeichnet. Zeigen Sie: Wenn sich alle drei Kreise von außen berühren, dann haben
sie die Radien s − a, s − b, s − c, wobei, wie üblich, a, b, c die Längen der Seiten und s den halben Umfang
bezeichnen.
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 4
20.05.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 27.05.2008 vor der Vorlesung abzugeben.
Aufgabe 13 (2 Punkt(e), Ankreise). Zeigen Sie für die Mittelpunkte WA , WB , WC der Ankreise eines
Dreiecks ABC:
1. Das Dreieck ABC ist das Höhenfußpunktsdreieck des Dreiecks WA WB WC .
2. Der Umkreis des Dreiecks ABC ist der Feuerbachkreis des Dreiecks WA WB WC .
Aufgabe 14 (2 Punkt(e), Euler-Poncelet-Beziehung). Betrachten Sie das Dreieck in der Ebene R2 mit
den Ecken A = (0, 0), B = (4, 0), C = (0, 3).
1. Bestimmen Sie für dieses Dreieck den halben Umfang s, die Fläche F, den Schnittpunkt W der
Winkelhalbierenden, den Schnittpunkt M der Mittelsenkrechten, den Inkreisradius r und den Umkreisradius R.
2. Verifizieren Sie die Eulersche Beziehung zwischen r, R und dem Abstand d der Mittelpunkte von Inund Umkreis.
3. Veranschaulichen Sie die Situation und auch die Umkehrung des Eulerschen Satzes außerdem in
einem dynamischen Geometrie Programm und schicken Sie die Datei an [email protected].
Insgesamt werden für dieses Blatt 4 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 5
27.05.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 03.06.2008 vor der Vorlesung abzugeben.
Aufgabe 15 (3 Punkt(e), Complex Tracing).
1. Berechnen Sie mit Hilfe eines Computeralgebra-Programmes (ein Taschenrechner mag auch reichen)
eine Werte-Tabelle, die verdeutlicht, wie das Complex Tracing am Beispiel der Schnittpunkte zweier
Kreise ki mit Radius 1 und Mittelpunkt Mi , funktioniert:
Die Startposition sei M1 = (0, 0) und M2 = (1.9, 0), die Endposition M1 = (0, 0), M2 = (2.1, 0).
Anschließend wird M2 wieder auf seine Startposition zurückbewegt. Verwenden Sie dabei einen
geeigneten Pfad, der die Singularität bei M2 = (2, 0) vermeidet.
2. Verdeutlichen Sie dies anhand einer geeigneten Graphik, z.B. wie in der Vorlesung durch Andeuten
der Imaginärteile der Punkte durch Pfeile.
Aufgabe 16 (2 Punkt(e), Axiome für affine Ebenen). Zeigen Sie für affine Ebenen gemäß der Definition
auf Basis der Axiome A1–A3:
1. Parallelismus ist eine Äquivalenzrelation.
2. Zwei verschiedene Geraden haben höchstens einen Punkt gemeinsam.
Aufgabe 17 (2 Punkt(e), Die kleinste affine Ebene). Wir betrachten wieder affine Ebenen gemäß der
Definition auf Basis der Axiome A1–A3. Zeigen Sie:
1. Es gilt: Jede affine Ebene hat wenigstens 4 Punkte.
2. Es gibt eine affine Ebene mit genau 4 Punkten. Geben Sie eine solche explizit mit Punkten und
Geraden an.
Insgesamt werden für dieses Blatt 7 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 6
03.06.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 10.06.2008 vor der Vorlesung abzugeben.
Aufgabe 18 (2 Punkt(e), Dreiecke und Ellipsen). Eine Ellipse berühre die drei Seiten eines Dreiecks.
Zeigen Sie, dass die drei Verbindungsgeraden der Ecken des Dreiecks mit den Berührpunkten auf den
gegenüberliegenden Seiten sich in einem gemeinsamen Punkt schneiden.
Aufgabe 19 (2 Punkt(e), Kegelschnitt durch 5 vorgegebene Punkte). Wir möchten konkrete Gleichungen für Kurven finden, die durch vorgegebene Punkte gehen:
1. Seien P = (P1 , P2 ) ∈ R2 und Q = (Q1 , Q2 ) ∈ R2 zwei verschiedene Punkte. Zeigen Sie, dass
P1 Q1 x
PQ : det P2 Q2 y = 0 die Gleichung der Geraden durch P und Q ist.
1 1 1
2. Seien P1 , . . . , P5 ∈ R2 fünf verschiedene Punkte, von denen keine vier auf einer Geraden liegen. Wie
kann man die Gleichung eines Kegelschnitts durch P1 , . . . , P5 analog zur Gleichung der Geraden
ebenfalls mit Hilfe einer Determinante angeben?
Hinweis: Entwickeln nach der letzten Spalte liefert für die Gerade PQ: det(. . .) = (∗)x + (∗)y + (∗) für
gewisse Koeffizienten (∗) und ein Kegelschnitt in R2 hat eine Gleichung der Form ax2 + 2bxy + cy2 +
2dx + 2ey + f = 0. Versuchen Sie nicht, zu beweisen, dass die resultierende Gleichung echt Grad 2
und nicht vielleicht nur auf 0 = 0 führt.
Aufgabe 20 (2 Punkt(e), Gärtner-Konstruktion der Ellipse).
1. Zeigen Sie, dass jede Ellipse im A2 (R), die sich als Schnitt des Kegels mit Gleichung x2 + y2 − z2 mit
einer gewissen Ebene ergibt, die Gärtner-Konstruktions-Eigenschaft erfüllt (mittleres Bild): Für jede
Ellipse gibt es zwei Punkte B1 , B2 und eine Zahl c ∈ R, so dass für jeden Punkt S der Ellipse gilt:
a1 (S) + a2 (S) = c, wobei ai (S) der Abstand des Punktes Bi von S ist.
a1 (S)
y
S
B1
B2
S1
a2 (S)
S2
T1
B′2
T2
x
B1
B2
Hinweis: Es mag hilfreich sein, sich zwei Kugeln zu denken, die sowohl den Kegel von innen als
auch die Ebene von oben bzw. unten berühren (linkes Bild).
2. Konstruieren Sie eine Ellipse als Ortskurve in C, indem Sie die Gärtner-KonstruktionsEigenschaft ausnutzen und schicken Sie die Datei an [email protected].
Aufgabe 21 (2 Punkt(e), Brennpunkte der Ellipse).
1. Zeigen Sie, dass eine Ellipse die Brennpunkts-Eigenschaft erfüllt, d.h. ∡(B1 , S, T1 ) = ∡(T2 , S, B2 ) im
mittleren Bild, wobei T1 T2 die Tangente an die Ellipse in S ist.
Hinweis: Es mag helfen, den Punkt B′2 zu betrachten, der durch Spiegelung des Punktes B2 an der
Tangente T1 T2 hervorgeht, siehe rechtes Bild; in dem Bild liegen B1 , S1 , B′2 auf einer Geraden.
2. Benutzes Sie diese Eigenschaft, um sowohl in GG als auch in C eine Tangente an eine Ellipse zu konstruieren, deren beide Brennpunkte gegeben sind (Dateien bitte an
[email protected]).
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 7
10.06.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 17.06.2008 vor der Vorlesung abzugeben.
Aufgabe 22 (2 Punkt(e), Basis-Funktionen von Dynamischer Geometrie Software). In einem Programm sei das Kreuzprodukt für Vektoren im R3 implementiert. Wie kann man damit die folgenden
Aufgaben in P2 (R) implementieren, wenn alle Punkte und Geraden in homogenen Koordinaten der
Form (p1 : p2 : p3 ) bzw. (g1 : g2 : g3 ) vorliegen? Berechnen Sie, falls nötig, jeweils einige Beispiele.
1. Die Verbindungsgerade PQ zweier verschiedener Punkte P und Q.
2. Den Schnittpunkt P = g ∩ h zweier verschiedener Geraden g und h.
3. Die Parallele g′ in R2 zu einer gegebenen Geraden g ∈ R2 durch P. Hierbei gehen wir davon aus,
dass wir die Standard–Einbettung σ : R2 → P2 (R), (X1 , X2 ) 7→ (1 : X1 : X2 ) verwenden und g, g′ in
den entsprechenden homogenen Koordinaten vorliegen. Die unendlich ferne Gerade ist: (1 : 0 : 0).
4. Die Gerade g ∈ R2 mit Steigung m durch einen gegebenen Punkt P. Wieder gehen wir hier von der
Standard–Einbettung σ aus.
Aufgabe 23 (2 Punkt(e), Kreise).
1. Es seien zwei Kreise k1 , k2 mit Radius r1 bzw. r2 , Zentrum O = (0, 0) ∈ R2 und Gleichung x2 +
y2 = r2i , i = 1, 2 gegeben. Sie haben offenbar keinen Schnittpunkt in R2 . Welche unendlich fernen
Schnittpunkte haben ihre projektiven Abschlüsse k¯1 und k¯2 in P2 (R)? Welche unendlich fernen
Schnittpunkte haben k̄1 und k̄2 in P2 (C)?
2. Zeigen Sie: Ist k ⊂ R2 ein beliebiger Kreis mit Zentrum p ∈ R2 , so liegen die unendlich fernen
Schnittpunkte aus dem vorigen Aufgabenteil auf k̄ ⊂ P2 (C).
Aufgabe 24 (2 Punkt(e), Fortsetzung aff. Trans.).
1. Setzen Sie die affinen Transformationen ϕi : K → K mit
ϕ1 (x) = x + c,
ϕ2 (x) = c · x mit c , 0
zu proj. Transformationen Φi : P1 (K) → P1 (K) fort und geben Sie zugehörige 2 × 2–Matrizen an.
2. Finden Sie 2 × 2–Matrizen zu den rationalen Funktionen
f1 : z 7→
−1
,
z
1
f2 : z 7→ 1 + ,
z
Bestimmen Sie jedesmal den Bildpunkt des Punktes ∞.
f3 : z 7→
z
.
z−1
Aufgabe 25 (2 Punkt(e), Fixpunkte proj. Trans.). Ein Punkt X ∈ Pn (K) heißt Fixpunkt der projektiven
Transformation P : Pn (K) → Pn (K), wenn gilt: P(X) = X.
1. Zeigen Sie: X = (X0 : · · · : Xn ) ∈ Pn (K) ist genau dann ein Fixpunkt einer Projektivität mit der
(n + 1) × (n + 1)–Matrix A, wenn der zugehörige Vektor X̂ := (X0 , . . . , Xn ) ∈ Kn+1 Eigenvektor der
Matrix A ist.
2. Zeigen Sie: Eine Projektivität P : P1 (C) → P1 (C), P , id, hat entweder genau einen oder genau zwei
Fixpunkte; eine Projektivität P : P1 (R) → P1 (R) hat entweder genau einen, genau zwei oder gar
keinen Fixpunkt.
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 8
17.06.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 24.06.2008 vor der Vorlesung abzugeben.
Aufgabe 26 (2 Punkt(e), vor und zurück).
1. Zeigen Sie den folgenden affinen Spezialfall des Satzes von Pappos (s. Abb. unten links), indem Sie
den projektiven Satz von Pappos aus der Vorlesung verwenden:
Im R2 seien A, B, C drei Punkte auf einer Geraden g und A′ , B′ , C′ drei Punkte auf einer Geraden
g′ , g und keiner der Punkte sei im Schnitt beider Geraden. Falls AB′ k BA′ und BC′ k CB′ , so gilt:
AC′ k CA′ .
A
ϕ
B
ψ
C
B
SC
O
C′ ψ
C
g
B′
ϕ
A
A′
A′
g′
g
SB
SA
B′
C′
g′
2. Zeigen Sie den projektiven Satz von Pappos (rechte Abb.) ohne das Prinzip der projektiven Ausdehnung und ohne den Achsensatz, indem Sie den affinen Spezialfall aus dem ersten Teil der Aufgabe
als bekannt voraussetzen.
Aufgabe 27 (2 Punkt(e), Das Doppelverhältnis). P1 , . . . , P4 seien vier verschiedene Punkte der affinen
Geraden K mit den Koordinaten x1 , . . . , x4 . Zeigen Sie:
1. DV(P1 , P2 ; P3 , P4 ) = −1 ⇐⇒ (x1 + x2 )(x3 + x4 ) = 2(x1 x2 + x3 x4 ).
2. x1 , x2 seien die Nullstellen der quadratischen Gleichung ax2 + 2bx + c = 0 und x3 , x4 die Nullstellen
der Gleichung a′ x2 + 2b′ x + c′ = 0. Dann gilt:
DV(P1, P2 ; P3 , P4 ) = −1 ⇐⇒ 2bb′ − ac′ − a′ c = 0.
Aufgabe 28 (2 Punkt(e), Die harmonische Polare). ABC ⊂ P2 (K) sei ein Dreieck und P ein Punkt, der
auf keiner der Dreiecks–Seiten liegt. Wir setzen:
A′ := AP ∩ BC, B′ := BP ∩ CA, C′ := CP ∩ AB.
Der Punkt A′′ ∈ BC (bzw. B′′ ∈ CA, C′′ ∈ AB) sei harmonisch konjugiert zu A′ (bzw. B′ , C′ ) bzgl. B und
C (bzw. C und A, A und B). Hierbei heißt ein Punkt P′ auf einer Geraden l harmonisch konjugiert zu
Y ∈ l bzgl. Q, R ∈ l, wenn das Doppelverhältnis DV(Y, Y′ ; Q, R) = −1 ist.
1. Zeigen Sie: A′′ , B′′ , C′′ liegen auf einer Geraden. Diese Gerade heißt harmonische Polare des Punktes
P bzgl. des Dreiecks ABC.
2. Berechnen Sie die harmonische Polare des Punktes P = (a : b : c) bzgl. des Koordinatendreiecks mit
den Ecken A = (1 : 0 : 0), B = (0 : 1 : 0), C = (0 : 0 : 1).
Aufgabe 29 (2 Punkt(e), Perspektivische Dreiecke). Das Dreieck A′ B′ C′ sei dem Dreieck ABC einbeschrieben (d.h. A′ ∈ BC, B′ ∈ CA, C′ ∈ AB, aber keine Ecken fallen zusammen) und das Dreieck A′′ B′′ C′′
sei dem Dreieck ABC umbeschrieben (d.h. das Dreieck ABC sei dem Dreieck A′′ B′′ C′′ einbeschrieben). Zeigen Sie: Wenn A′ B′ C′ und A′′ B′′ C′′ beide zum Dreieck ABC perspektiv sind, so sind sie auch
zueinander perspektiv.
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 9
24.06.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 01.07.2008 vor der Vorlesung abzugeben.
Aufgabe 30 (1 Punkt(e), Dualität). Dualisieren Sie den Achsensatz.
Aufgabe 31 (2 Punkt(e), Klassifikation der Kegelschnitte). Zu welcher Klasse von Kegelschnitten gehören die folgenden Kegelschnitte bzw. deren projektive Abschlüsse
1. in der reellen affinen Ebene R2 ,
2. in der reellen projektiven Ebene P2 (R),
3. in der komplexen projektiven Ebene P2 (C)?
a) x2 + 4xy + y2 + 3x + 3y + 1 = 0,
b) 2x2 + 2xy + 2y2 − 3x − 6y − 15 = 0,
c) 2x2 + 2xy + 2y2 − 3x − 6y − 13 = 0,
d) x2 + 2xy + y2 + x − y = 0,
e) x2 + 2xy + y2 + 4x + 4y = 0.
Aufgabe 32 (2 Punkt(e), Projektive Kegelschnitte). Seien U = (U0 : U1 : U2 ), V = (V0 : V1 : V2 ) ∈ P2 (K)
zwei Punkte. Zeigen Sie: Die Geraden l : hU, Xi = 0 und m : hV, Xi = 0 schneiden sich genau dann auf
dem Kegelschnitt k : Xt AX = 0 im P2 (K), wenn:
A U V
det Ut 0 0 = 0.
t
V 0 0
Aufgabe 33 (2 Punkt(e), Veröffentlichen dynamischer Konstruktionen). Ein großer Vorteil dynamischer Geometrie Software ist die Möglichkeit, erstellte Konstruktionen als interaktive Konstruktionen
ins Internet stellen zu können. EuklidDynaGeo kann dies für kompliziertere Konstruktionen leider nur
in einem Format, das nur Windows-Nutzer ansehen können!
Konstruieren Sie daher in GG oder C die Figur zum Satz von Desargues und erstellen
Sie eine html-Seite, die erstens den Satz und die Figur knapp erklärt und auf der man außerdem
interaktiv die Punkte und Geraden verschieben kann.
Senden Sie alle Dateien, die man zum Betrachten der Seiten ermöglicht, an [email protected].
Hinweis: Man kann die von den Programmen automatisch erstellten html-Seiten nachträglich entweder
in sogenannten html-Editoren verändern oder aber die html-Datei in einem Editor wie z.B. Notepad im
html-Format bearbeiten. Für die letzte Variante mag die Website http://de.selfhtml.org/ helfen; sie
erkärt das html-Format sehr ausführlich und mit vielen Beispielen.
Insgesamt werden für dieses Blatt 7 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 10
01.07.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 08.07.2008 vor der Vorlesung abzugeben.
Aufgabe 34 (2 Punkt(e), Eine Ebene, in der der Satz von Desargues nicht gilt). Wir definieren eine
affine Ebene A (nach der Def. 2.4 auf Basis der Axiome A1–A3) auf der Menge R2 wie folgt: Die Punkte,
vertikalen Geraden und Geraden mit negativer Steigung sind die selben wie in der gewöhnlichen reellen
affinen Ebene. Eine Gerade mit positiver Steigung ist aber keine Gerade im gewöhnlichen Sinn, sondern
ist zusammengesetzt aus zwei Teilen: Ein Punkt (x, f (x)) einer solche Geraden hat y-Koordinate
(
m(x − x0 ), x ≤ x0 ,
f (x) = m
2 (x − x0 ), x > x0 .
Überprüfen Sie, dass A tatsächlich eine affine Ebene gemäß Def. 2.4 ist. Zeigen Sie dann durch Angabe
einer konkreten Konfiguration von Punkten und Geraden, dass der Satz von Desargues in dieser Ebene
nicht gilt.
Kommentar (nicht zu zeigen): Vervollständigt man nun A zu einer projektiven Ebene P gemäß Def. 3.6 auf
Basis der Axiome P1–P4, indem man unendlich ferne Punkte hinzunimmt, so gilt auch dort der Satz von
Desargues nicht. Eine Projektive Ebene, in der der Satz von Desargues gilt, heißt daher desarguesche
projektive Ebene. Wir haben gesehen, dass die Ebenen P2 (K) desarguesch sind.
Aufgabe 35 (2 Punkt(e), Tangenten an Kegelschnitte). Bestimmen Sie die Tangenten an den Kegelschnitt
K : x2 + 2y2 + z2 + yz + 3xz + xy = 0 ⊂ P2 (C)
durch den Punkt (1 : 1 : 1) sowie deren Berührpunkte.
Aufgabe 36 (2 Punkt(e), Tangenten an Kegelschnitte). Gegeben sei der nicht–entartete Kegelschnitt
K : Xt MX = 0 ⊂ P2 (C) und ein Punkt P ∈ P2 (C). Zeigen Sie, dass die beiden Tangenten von P aus an K
einen entarteten Kegelschnitt mit Gleichung
(Pt MX)2 − (Pt MP)(Xt MX) = 0.
bilden.
Aufgabe 37 (2 Punkt(e), Elliptische Geometrie). Zeigen Sie, dass die Messung des Abstands zweier
Punkte P, Q in der Cayley–Klein–Geometrie auf den kürzesten Abstand d(P, Q) auf der Einheitskugeloberfläche führt, wenn man als Fundamentalgebilde den Kegelschnitt x2 + y2 + z2 = 0 verwendet und
wenn man die Normalisierungs–Konstante cdist geeignet wählt.
Insgesamt werden für dieses Blatt 8 Punkte vergeben.
Vertretungs-Prof. Dr. Oliver Labs, Zimmer 309
Universität Erlangen-Nürnberg, Mathematisches Institut
E-Mail: [email protected]
Web: www.mi.uni-erlangen.de/~labs/
Übungsblatt 11
08.07.2008
Dynamische Geometrie: Grundlagen und Anwendungen
Die Lösungen des Übungsblattes sind am 15.07.2008 vor der Vorlesung abzugeben.
Aufgabe 38 (0 Punkt(e), Parametrisierung von Kegelschnitten). Parametrisieren Sie den Kegelschnitt
K : X02 + X12 + X22 − 2(X0 X1 + X1 X2 + X2 X0 ) = 0
durch (λ : µ) ∈ P1 (C) so dass (1 : 0 : 1) ∈ K den Parameter (1 : 0) und (1 : 1 : 0) ∈ K den Parameter (0 : 1)
hat.
Aufgabe 39 (0 Punkt(e), Doppelverhältnis auf Kegelschnitten). Bestimmen Sie das Doppelverhältnis
der vier Punkte (−1 : −1 : 1), (−3 : 13 : 4), (5 : 3 : 4) und (6 : −5 : 7) auf dem Kegelschnitt
K : 3X02 + X12 − 5X22 − 2X1 X2 + X0 X2 = 0.
Aufgabe 40 (0 Punkt(e), Umkehrung des Satzes von Pascal). Beweisen Sie die Umkehrung des Satzes
von Pascal: Seien sechs Punkte A1 , A2 , A3 , B1 , B2 , B3 ∈ P2 (K) gegeben, so dass keine drei kollinear sind,
die drei Schnittpunkte
A1 B 2 ∩ A2 B 1 , A2 B 3 ∩ A3 B 2 , A3 B 1 ∩ A1 B 3
aber auf einer gemeinsamen Geraden l liegen, . Dann gibt es einen Kegelschnitt K, der durch diese sechs
Punkte A1 , . . . , B3 geht.
Aufgabe 41 (0 Punkt(e), Konstruktion von Kegelschnitten, Satz von Poncelet).
1. Konstruieren Sie in Cinderella oder GeoGebra mit Hilfe des Satzes von Pascal einen Kegelschnitt
durch fünf Punkte als Ortskurve.
2. Visualisieren Sie in einem der genannten Programme den Satz von Poncelet, indem Sie für K einen
Kreis und für L eine Ellipse innerhalb des Kreises wählen.
Insgesamt werden für dieses Blatt 0 Punkte vergeben.
B
Lösungen zu ausgewählten Aufgaben
Zu einigen der gestellten Aufgaben geben wir hier Lösungen an, weil sie
entweder für den weiteren Verlauf der Vorlesung essentiell sind oder weil sie
in der Übungsstunde zu knapp oder unvollständig vorgeführt wurden.
Lösung von Aufgabe 2
Siehe dazu den zusätzlichen Abschnitt 1.2 zum Thema Bewegungen im Skript.
Die dortigen Bemerkungen 1.12 und 1.13 liefern die wesentlichen Hinweise,
die zur Beantwortung der Aufgabe nötig sind.
Lösung von Aufgabe 7
Siehe dazu den zusätzlichen Abschnitt 1.2 zum Thema Bewegungen im Skript.
Die dortige Bemerkung 1.13 liefert die Antwort zur Aufgabe.
Lösung von Aufgabe 18
Die Aussage, dass sich drei Geraden in einem Punkt treffen, ändert sich nicht
unter einer affinen Transformation (wegen deren Bijektivität). Wie wir in der
Vorlesung schon gesehen haben, bleibt eine Tangente an eine Ellipse unter
einer affinen Transformation auch immer eine Tangente.
Wir suchen daher eine affine Transformation, die das gegebene Dreieck und
die gegebene Ellipse in ein anderes Dreieck und eine andere Ellipse überführt,
so dass die Aussage der Aufgabe einfacher zu zeigen ist.
Dies gilt beispielsweise, falls die Ellipse ein Kreis im R2 ist. Dieser ist dann
nämlich offenbar der Inkreis eines Dreiecks ABC mit Berührpunkten A′ , B′ , C′
und wir müssen nur zeigen, dass sich die Verbindungsgeraden A′ A, B′ B, C′ C
150
B Lösungen zu ausgewählten Aufgaben
in dieser Situation in einem Punkt schneiden. Die eine Richtung des Satzes
2.18 von Ceva gibt dazu das Kriterium an: Ist
TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = −1,
so sind die Geraden A′ A, B′ B, C′ C entweder parallel oder schneiden sich
in einem Punkt. Da sie in unserem Fall nicht parallel sind, müssen wir nur
zeigen, dass das Produkt der Teilverhältnisse wie angegeben ist.
Dies ist in unserem Fall aber einfach (s. Abb. B.1).
Abbildung B.1. Zum Gergonne–Punkt.
Es gilt nämlich:
1. Alle Teilverhältnisse sind bei uns negativ, weil die Punkte A′ , B′ , C′ jeweils innerhalb der Strecken BC, CA, AB liegen (siehe Abschnitt 0.5.2,
insbesondere Seite 15).
2. Weil die Seiten des Dreiecks Tangenten an den Inkreis sind und weil die
beiden Tangentenabschnitte jeweils gleiche Länge haben, gilt:
A′ C = B′ C =: d, A′ B = C′ B =: e, B′ A = C′ A =: f.
Damit folgt TV(A′ ; B, C) = − de etc. und insgesamt:
e d f TV(A′ ; B, C) · TV(B′ ; C, A) · TV(C′ ; A, B) = − · − · − = −1.
d
f
e
Wie schon oben gesagt, folgt daraus mit dem Satz von Ceva, dass sich beim
Kreis die Geraden in einem Punkt schneiden und daher auch, wie oben erwähnt, bei der ursprünglich gegebenen Ellipse. Dieser Punkt wird manchmal
auch Gergonne–Punkt genannt.
— Version vom: 16. September 2008 —
B Lösungen zu ausgewählten Aufgaben
151
Lösung von Aufgabe 20
In der Übung haben wir bereits den geometrischen Beweis der Aussage gesehen, der von Dandelin stammt; diesen führe ich daher hier nicht noch einmal
vor, siehe auch [HCV32, S. 6–10]. Da manche Hörer aber einen grundsätzlich
anderen Lösungsweg eingeschlagen haben, möchte ich diesen hier noch kurz
andeuten.
Man kann jede Ellipse, wie in der Vorlesung gesehen, auf die Normalform
E:
x2 y2
+
=1
a2 b2
bringen.
Nehmen wir nun an, dass a > b und dass die Behauptung der Aufgabe richtig
ist, so können wir die Konstante c, für die B1 S + SB2 = c für alle Punkte S der
Ellipse gilt, berechnen, wenn wir davon ausgehen, dass B1 und B2 auf der
x–Achse liegen.
Für die Punkte S = (a, 0) und S′ = (−a, 0) auf der Ellipse E gilt, weil wegen
der Symmetrie SB2 = S′ B1 und B2 O = OB1 ist:
SB2 + B2 O + OB1 + B1 S′ = a + a = 2a,
denn a = OS = OS′ . Dann folgt, weil B1 S′ = SB2 :
c = B1 S + SB2 = SB2 + B2 O + OB1 + B1 S′ = 2a.
Dies kann man nun benutzen, um die Behauptung für die Normalform der
Ellipse explizit nachzurechnen; wir führen es hier aber nicht vor. Da jede
andere Ellipse durch eine Bewegung aus einer in Normalform hervorgeht
und Bewegungen Abstände nicht verändern, folgt die Behauptung.
Lösung von Aufgabe 21
Bezeichnen wir mit a(S) := B1 S und b(S) := SB2 , so gilt, für jeden Punkt S auf
der Ellipse, a(S) + b(S) = c nach Aufgabe 20.
Sei nun S2 ein Punkt auf der Ellipse. Dann schreiben wir kurz a := a(S2 ) = B1 S2
und b := b(S2 ) = S2 B2 (Abb. B.2). Spiegeln wir B2 an der Tangente t in S2 an
die Ellipse, so erhalten wir einen Punkt B′2 und es gilt: S2 B′2 = b.
S1 sei nun der Schnittpunkt S1 := B1 B′2 ∩ t, der nicht innerhalb der Ellipse
liegt, weil die ganze Tangente außerhalb der Ellipse verläuft (weil sie ja nur
einen Schnittpunkt mit ihr hat).
— Version vom: 16. September 2008 —
152
B Lösungen zu ausgewählten Aufgaben
S1
S2
T1
a′
a
′
b′ B 2
b
b′ b
T2
B2
B1
Abbildung B.2. Zum Beweis der Brennpunktseigentschaft der Ellipse.
Wir nehmen nun an, dass S1 , S2 . Bezeichnen wir mit a′ := B1 S1 und b′ :=
S1 B2 , so folgt: a′ + b′ > c. Wieder wegen der Symmetrie gilt auch: S1 B′2 = b′ .
Es folgt außerdem aus der Annahme S1 , S2 , weil die Gerade B1 B′2 die
kürzeste Verbindung zwischen den beiden Punkten ist, dass a′ + b′ < a + b = c
(mit der Dreiecks–Ungleichung). Dies ist aber ein Widerspruch zur vorigen
Folgerung a′ + b′ > c. Also war die Annahme falsch und es gilt: S1 = S2 =: S.
Damit folgt, wegen der Symmetrie ∠B2 ST2 = ∠T2 SB′2 und weiter, als gegenüberliegender Winkel im Schnitt zweier Geraden: ∠T2 SB′2 = ∠B1 ST1 . Damit
ist die Behauptung bewiesen (s. auch [HCV32, S. 1–6]).
Lösung von Aufgabe 22
Da wir in der Vorlesung häufiger auf die Formeln zurückgreifen werden,
seien sie hier ohne Erläuterung kurz angegeben:
1. Die Verbindungsgerade von P und Q ist:
PQ : P × Q.
2. Der Schnittpunkt von g und h ist
P = g ∩ h = g × h.
3. Die Parallele g′ zu g durch P ist unter Ausnutzung der ersten beiden
Aufgabenteile:
g′ : (g × l∞ ) × P mit l∞ = (1 : 0 : 0).
4. Ist m =
sin(α)
cos(α) ,
α ∈ [−π/2, π/2], so ist die Gerade g mit Steigung m durch P:
g : (P × (0 : cos(α) : sin(α))),
weil (0 : cos(α) : sin(α)) der ∞ ferne Punkt auf der Geraden durch (1 : 0 : 0)
mit Steigung m und daher auch auf der dazu parallelen Geraden g ist.
— Version vom: 16. September 2008 —
Literatur
Bar04. W. Barth, Geometrie–Skript Sommersemester 2004, verfügbar über die Webseite:
www.mi.uni-erlangen.de, 2004.
Dur20. C.V. Durell, Modern Geometry: The Straight Line and Circle, Macmillan, 1920.
Hal74. P.R. Halmos, Naive set theory. Reprint., Undergraduate Texts in Mathematics.
New York-Heidelberg-Berlin: Springer- Verlag. VII, 104 p. Cloth DM 13.50; $
5.50 , 1974 (English).
HCV32. D. Hilbert and S. Cohn-Vossen, Anschauliche Geometrie, Verlag von Julius
Springer, Berlin, 1932.
HLM05. S. Holzer, O. Labs, and R. Morris, – Visualization of Real Algebraic
Surfaces, www.surfex.AlgebraicSurface.net, 2005.
Joy96. D.E. Joyce, Euclid’s Elements Online, Dept. Math. & Comp. Sci. Clark University,
http://aleph0.clarku.edu/ djoyce/java/elements/elements.html, 1996.
KK93. M. Koecher and A. Krieg, Ebene geometrie, Springer, 1993.
KK96. L. Kadison and M.T. Kromann, Projective Geometry and Modern Algebra, Birkhäuser, 1996.
Kle22. F. Klein, Gesammelte Mathematische Abhandlungen, vol. II, Verlag von Julius
Springer, Berlin, 1922.
Kle25.
, Elementarmathematik vom höheren Standpunkte aus, vol. I-III, Verlag von
Julius Springer, Berlin, 1925.
Kor99. U. Kortenkamp, Foundations of Dynamic Geometry, Ph.D. thesis, Swiss Federal
Institute of Technology Zürich, 1999.
KRG01. U. Kortenkamp and J. Richter-Gebert, Cinderella, www.cinderella.de, 2001.
Lab08. O. Labs, Dynamische Geometrie: Grundlagen und Anwendungen, Tech. report, Universität des Saarlandes, 2007/08, Skript zu einer Vorlesung, siehe
www.OliverLabs.net.
Mar98. G. E. Martin, Geometric Constructions, Springer, 1998.
OR07. J.J. O’Connor and E.F. Robertson, The MacTutor History of Mathematics archive,
http://www-history.mcs.st-andrews.ac.uk/history/index.html, 2007.
Ran95. Randomized Algorithms, ch. 7, Cambridge University Press, 1995.
Rei88. Miles Reid, Undergraduate Algebraic Geometry, Cambridge University Press,
1988.
Sch49. H. Schmidt, Ausgewählte höhere Kurven, Kesselringsche Verlagsbuchhandlung
Wiesbaden, 1949.
154
Literatur
Sch06. F.-O. Schreyer, Mathematik für Informatiker 2 (Lineare Algebra), Tech. report,
Universität des Saarlandes, 2006, Ausarbeitung von Oliver Labs, verfügbar
via www.math.uni-sb.de/ag/schreyer/.
SS02. C.J. Scriba and P. Schreiber, 5000 Jahre Geometrie, Springer, 2002.
Var07. Various, Deutsche Wikipedia, http://de.wikipedia.org, 2007.
— Version vom: 16. September 2008 —
Index
P liegt auf l 51
l geht durch P 51
Ähnlichkeitsabbildungen
ähnlich 14
äqui–anharmonisch 85
bis auf projektive Äquivalenz
13
abdecken 80
Abstand 13
Abstand vom affinen Unterraum 23
Abstand zweier Punkte 22
Achse der Projektivität 113
achsenparallele Ellipse 57
Achsensatz 87
affin unabhängig 51
affine Ansicht 80
affine Ebene 51
affine Gruppe 13
affine Karte 80
affine Standard–Ansicht 72
affine Standard–Karte 72
affine Transformation 13
affiner Unterraum 18
Affinkombination 18, 28, 50
algebraisch 29
allgemeinen linearen Gruppe 13
analytisch 29
Ankreis 34
Ankreisradien 35
Automorphismus 75
baryzentrischen Koordinaten
Basis der Konchoide 129
Bewegung 57, 65
Bewegungen 13
54
83
Cauchy–Schwarz–Ungleichung
Cosinussatz 28
22
desarguesche projektive Ebene
deterministisch 38
Dimension 18
Diskriminante 98
Doppelgerade 96
Doppelverhältnis 17
Drehspiegelungen 26
Drehung 26
Dreieck 20
Höhen im 6
Dreiecks–Ungleichung 22
duale Gerade 89
duale projektive Ebene 92
duale Punkt 89
dualen Vektorraum 92
dualer Kegelschnitt 101
dualer projektiver Raum 92
Dualitätsprinzip 90
Durchmesser 60
147
Ebenen 18
echte Vierecke 83
echter m–dimensionaler Simplex 20
einbeschrieben 145
eindimensionale projektive Gruppe 16
Ellipse 57
elliptische Geometrie 106
entartet 64, 85, 96
Erlanger Programm 12
156
Index
erweiterten Matrix 50
erweiterten Vektor 50
euklidische Skalarprodukt
euklidischen Körper 125
Eulergerade 36
Eulergeraden 30
Eulergleichung 30
iterierte quadratische Erweiterung
22
Feuerbachkreis 35
Fixpunkt 144
Formel von Laguerre 104
Fußpunkt 23
Fundamentalgebilde 104
gebrochen–rationale Funktion
geometrische Ort 27
Geraden 18, 51, 75
Geradenbüschel 93
Geradenpaar 96
Gergonne–Punkt 150
gespiegelte Punkt 24
GL 13
glatt 64, 96
Großkreisen 74
16
Höhe 29
Halbachsen 57
Halbierende der Nebenwinkel 29
harmonisch 85
harmonisch konjugiert 145
harmonische Polare 145
Hauptachsentransformation 58
Hexagramma mysticum 113
homogen 77
homogenisierende Variable 77
Hyperbel 64
hyperbolische Geometrie 106
Hyperebenen 18
imaginäre Einheit 40
Inkreis 34
Inkreisradius 35
Instanz 120
invariant 13
Inzidenzmatrix 52
inzidiert 52
inzidiert mit 89
isomorph 75
Isomorphismus 75
126
kanonische Parametrisierung 108
Kegelschnitt 96
Kegelschnitte 61
kollinear 52
Kollinearitätskriterium für Kegelschnitte
111
komplexen Zahlen 40
Konchoide des Nikomedes 129
konforme Gruppe 13
kongruent 14
Kongruenzabbildungen 13
konjugiert 60, 100
konstruierbar 123
konstruierbar mit Lineal 127
konstruierbar mit Zirkel und Lineal
127
konstruierbare Gerade 124
konstruierbare Zahl 124
konstruierbarer Kreis 124
konstruierbarer Punkt 123
kontinuierlich 38
Kontinuitätsprinzip 38
Koordinaten–Transformation 96
Kreis 30
Kreis durch 3 Punkte 32
Kreisgleichung 30
Kreispunkten 103
Länge 22
Linearformen
92
Matrix
hermitesch 58
symmetrisch 57
Mittelpunkt der Ellipse
Mittelsenkrechte 29
Mittendreiecks 35
Monodromie 46
Moultons Ebene 147
Nebenwinkel 29
nicht–entartet 64, 96
nicht–singulär 96
Nordpol 106
Norm 22
Normalform 96
Normierungskonstanten
— Version vom: 16. September 2008 —
60
104
Index
O(n) 13
orientierte Länge 28
orientierter Abstand 28
orientierter Winkel 28
orientiertes Volumen 28
orthogonal 13, 22
orthogonale Abbildungen 13
orthogonale Gruppe 13
orthogonales Komplement 23
Orthogonalprojektion auf den affinen
Unterraum 23
Ortskurve 10, 127
Ortskurven 123
Parabel 63, 64
parallel 18, 19, 52
parallele Geraden 19
Parallelenaxiom 52
Parallelogramm 54
Parallelotop 28
Parallelprojektion 53
Parametrisierung 107
Pascal–Geraden 113
perspektiv 88
Perspektivität 81
Perspektivitätszentrum 81
Pol 100
Pol der Konchoide 129
Polare 31, 60
Polaren 99
Polarisationsformel 22
Polarität 100
Polarkoordinaten 40
Porismus von Poncelet 115
projektiv äquivalent 83
projektiv unabhängig 82
projektive Abbildung 79
projektive Ebene 75
projektive Gruppe 79
projektive Hyperebene 76
projektiver n-dimensionaler Raum
projektiver Raum 91
Projektivität 79
Projektivitätsachse 87
Punkt 96
Punkte 18, 51, 75
punktsymmetrisch 62
quadratische Erweiterung
125
71
157
Quadratrix des Dinostratus 132
Quadratur des Kreises 132
Quadrik 65
Rang 97
rational parametrisierte Kurve
rechter Winkel 22
128
Satz über fünf Punkte auf einem
Kegelschnitt 114
Satz des Pythagoras 25
Satz des Pythagoras 22
Satz von Brianchon 114
Satz von Chasles 109
Satz von Desargues 88, 91
Satz von Pappos 87, 91
Satz von Pascal 113
Satz von Poncelet 115
Satz von Vieta 31
Sehnenviereck 32
Seitenhalbierende 29
Seitenmitten 35
Sekante 60
senkrecht 22
Signatur 96, 97
Simplex 20
singulär 64, 96
spezielle orthogonale Gruppe 26
sphärischen Ansicht 74
Spiegelung 26
Spiegelung am affinen Unterraum 24
Spiegelung an affinem Unterraum 24
Standard–Einbettung 70
Steinersche Erzeugung eines Kegelschnittes 109
stereographischen Projektion 106
Strecke 20
synthetisch 29
Tangente 31, 60, 98
Tangentengleichung
Teilverhältnis 14
transzendent 132
Trisektrix 132
31
umbeschrieben 145
Umkreis 33
unendlich ferne Hyperebene
unendlich fernen Ebene 70
— Version vom: 16. September 2008 —
71, 76
158
Index
unendlich fernen Punkte
Ursprungsgeraden 26
vollständiges Viereck
85
Würfelverdopplung
windschief 19
129
70, 71
Winkeldreiteilung 132
Winkelhalbierende 27
Zentrum 81, 93
zugehöriger paralleler Untervektorraum
18
— Version vom: 16. September 2008 —
Nachwort
Ich hoffe, dass den Hörer/innen die Vorlesung Spaß gemacht hat, dass sie
während des Semesters einiges gelernt haben und dass ich die Faszination, die
das Zusammenspiel von Geometrie und Algebra ausüben kann, zumindest
andeutungsweise vermitteln konnte.
Leider mussten fünf Vorlesungs–Doppelstunden ausfallen, so dass die Vertiefung des Studiums der Ortskurven, die ich eigentlich geplant hatte, wegfallen musste. Insbesondere zählt hierzu die Unterscheidung der Singularitäten
solcher Kurven, die insbesondere algebraische Kurven sind, und die Frage
ihrer Parametrisierbarkeit. Außerdem konnte ich leider nicht mehr beweisen,
dass die klassischen Probleme der Griechen mit Zirkel und Lineal tatsächlich
nicht lösbar sind. Dies wird allerdings glücklicherweise in vielen Algebra
Vorlesungen durchgeführt.
Daher hoffe ich, dass ich den Hörer/innen Lust gemacht habe, sich anhand der
angegebenen Literatur oder anderen Vorlesungen weiter in die ebene Geometrie und vielleicht sogar in das tiefere Studium der ebenen algebraischen
Kurven einzuarbeiten.
Inzwischen gibt es auch recht intuitiv nutzbare Software zur dynamischen
Geometrie in drei Dimensionen. Viele der in unserer Vorlesung angesprochenen Themen haben im Drei–Dimensionalen ihre Entsprechungen und es
macht sicher Spaß, mehr darüber zu erfahren. Ein erstes Buch zum Reinschnuppern ist der Klassiker [HCV32] von D. Hilbert und S. Cohn–Vossen.
Im Juli 2008,
Oliver Labs