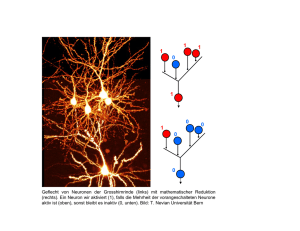
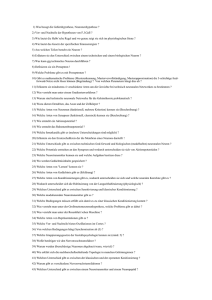
Neuronenmodelle
Werbung

Neuronenmodelle
(1) Dendritisches Potential uj von Neuron j
τk u̇j (t) = −uj (t) +
X
akj (t)(Uk − uj (t)) + xj (t)
k
(V) Variante: uj wird nach Spike von j auf Ruhepotential U0 gesetzt.
(2) Gesamtinputaktivität akj im Kanal k von Neuron j
akj (t)
=
X
aij (t)
i∈Ik
Übertragene Aktivität aij von Neuron i auf Neuron j
aij (t) =
X
s∈T i
rk (t − (s + dij ))cij =
X
s
rk (t − (s + dij ))yi(s)cij
(3) Outputaktivität yj von Neuron j
yj (t) = 1[uj (t)≥θj (t)]
(4) Schwellenfunktion θj und Spikezeitpunkte T j von Neuron j
θj (t) = max ϑk (t − s)
s∈T j
für j ∈ Ik und
(5) Diskretisierung von (1) mit ̺k :=
∆t
τk
uj (t + ∆t) = (1 − ̺k ) · uj (t) + ̺k
T j = {s : yj (s) = 1}
und ̺k ∈ (0, 1]
X
k
akj (Uk − uj (t)) + ̺k xj (t)
Modellvoraussetzungen
• I = {1, . . . , N } die Menge der Neuronen.
• Ik ⊂ I bezeichnet die Neuronen vom Kanaltyp k.
Es gilt: I1 ∪ . . . ∪ Ik = I; Ii ∩ Ij = ∅ für i 6= j.
• τk > 0 Zeitkonstante für die Neuronen vom Typ k
• C = (cij ) die synaptische Kopplungsmatrix und D = (dij ) die Matrix der
Delays.
• rk : R+ → R+ die Responsefunktion und ϑk : R+ → R+ die Schwellenfunktion für Neuronen vom Typ k.
Vereinfachungen
a) Response Funktion durch Gesamtwirkung wij beschreiben:
X
′
k
wij yi(t − dij )
(2 )
aj (t) =
i∈Ik
b) Uk − u ersetzen durch Uk (unterhalb der Schwelle ist u klein):
X
′
(1 )
τ u̇j (t) = −uj (t) +
akj (t)Uk + xj (t)
k
Mit (2′) folgt:
′′
(1 )
τ u̇j (t) = −uj (t) +
X
wij yi (t − dij ) + xj (t)
i
c) Einfache zweiwertige Schwellenfunktion ϑ(t) ∈ {ϑref , ϑrest}.
d) Schwellenmechanismus durch Ratenfunktion f ersetzen:
(3′)
yj (t) = fk (uj (t))
für j ∈ Ik
e) Alle Delays = 1; alle Delays = 0.
Bezeichnungen
Kanalmodell: Gleichungen 1, 2, 3 und 4
Spike-Response-Modell: 1′, 2, 3 und 4
Dynamic-Threshold-Modell: 1, 2′, 3 und 4
Integrate-and-Fire-Modell: 1′′ mit Variante (V), 3, 4 und mit einfacher
Schwelle (d).
Ratenmodell: 1, 2 und 3′.
Grundmodell: 1′′ und 3′
Lineares Modell: 1′, 3′ und mit linearer Ratenfunktion f .
Einfaches lineares Modell: 1′′, 3′, Delays alle = 0 und mit linearer Ratenfunktion f .