Inhaltsverzeichnis 1 Grundlagen
Werbung

Theorieblätter Physik Stefan Hellinge August 03
Inhaltsverzeichnis
1
Grundlagen......................................................................................................................................... 2
1.1
SI-Einheiten (Basisgrössen)........................................................................................................ 2
1.2
Vorsatzzeichen (vor der physikalischen Einheit) ........................................................................ 2
1.3
Runden auf n Stellen hinter dem Komma ................................................................................... 2
1.4
Genauigkeit von Messwerten und Ergebnissen ......................................................................... 2
2
Wärmelehre ........................................................................................................................................ 3
2.1
Temperaturskalen ....................................................................................................................... 3
2.2
Ausdehnung ................................................................................................................................ 3
2.2.1 Ausdehnung Festkörper ......................................................................................................... 3
2.2.2 Ausdehnung Flüssigkeiten...................................................................................................... 4
2.2.3 Ausdehnung Gase (Gasgesetz) ............................................................................................. 4
2.3
Kalorimetrie ................................................................................................................................. 5
2.3.1 Wärmemenge bei Temperaturänderung ................................................................................ 5
2.3.2 Wärmemenge bei Aggregatzustandsänderung ...................................................................... 5
2.3.3 Wärmemenge bei Temperaturänderung und Aggregatzustandsänderung............................ 5
2.3.4 Wärmemischung ohne Aggregatzustandsänderungen .......................................................... 6
2.3.5 Wärmemischung mit Aggregatzustandsänderungen.............................................................. 6
2.3.6 Wärmetransport ...................................................................................................................... 7
3
Mechanik............................................................................................................................................. 8
3.1
Kinematik..................................................................................................................................... 8
3.1.1 Massenpunkt / Inertialsystem ................................................................................................. 8
3.1.2 Weg/Zeit-Diagramm (s/t-Diagramm)....................................................................................... 8
3.1.3 Geschwindigkeits/Zeit-Diagramm (v/t-Diagramm).................................................................. 8
3.1.4 Gleichförmige Bewegung (konstante Geschwindigkeit) ......................................................... 9
3.1.5 Gleichförmige Kreisbewegung (konstante Geschwindigkeit) ................................................. 9
3.1.6 Überlagerung von Bewegungen ............................................................................................. 9
3.1.7 Gleichförmig beschleunigte Bewegung ................................................................................ 10
3.1.8 Freier Fall.............................................................................................................................. 10
3.1.9 senkrechter Wurf .................................................................................................................. 10
3.1.10
horizontaler Wurf .............................................................................................................. 11
3.1.11
Schiefer Wurf.................................................................................................................... 11
3.2
Dynamik .................................................................................................................................... 12
3.2.1 Gewichtskraft ........................................................................................................................ 12
3.2.2 Reibungskraft........................................................................................................................ 12
3.2.3 Hangabtriebskraft ................................................................................................................. 12
3.2.4 Trägheitskraft ........................................................................................................................ 13
3.2.5 Berechnungen mit Reibungskräften, Hangabtriebs- und Trägheitskraft .............................. 13
3.2.6 Fliehkraft ............................................................................................................................... 13
3.3
Energie und Arbeit .................................................................................................................... 14
3.3.1 mechanische Arbeit .............................................................................................................. 14
3.3.2 Hubarbeit .............................................................................................................................. 14
3.3.3 Beschleunigungsarbeit ......................................................................................................... 14
3.3.4 Leistung ................................................................................................................................ 14
3.3.5 Energie / Energieerhaltungssatz........................................................................................... 15
3.3.6 Wirkungsgrad........................................................................................................................ 15
3.4
Statik ......................................................................................................................................... 16
3.4.1 Drehmoment ......................................................................................................................... 16
3.4.2 Hebel..................................................................................................................................... 16
3.4.3 Auflagerkräfte........................................................................................................................ 16
3.4.4 Kräfteaddition........................................................................................................................ 17
3.4.5 Kräftezerlegung..................................................................................................................... 18
3.5
Statik der Fluide ........................................................................................................................ 19
3.5.1 Druck..................................................................................................................................... 19
3.5.2 hydrostatischer Druck ........................................................................................................... 19
3.5.3 Auftrieb.................................................................................................................................. 19
4
Elektrotechnik .................................................................................................................................. 21
4.1
elektrische Spannung U ............................................................................................................ 21
4.2
elektrische Stromstärke I........................................................................................................... 21
4.3
ohmscher Widerstand R............................................................................................................ 21
4.4
Widerstand eines Leiters........................................................................................................... 22
4.5
Kirchhoff’sche Gesetze ............................................................................................................. 22
4.6
elektrische Leistung P ............................................................................................................... 23
-1-
Theorieblätter Physik Stefan Hellinge August 03
1
Grundlagen
1.1
SI-Einheiten (Basisgrössen)
Einheit
Abkürzung
Einheit
Länge
Masse
Zeit
elektr. Stromstärke
Temperatur
Stoffmenge
Lichtstärke
l
m
t
I
T
n
Iv
Meter
Kilogramm
Sekunde
Ampère
Kelvin
Mol
Candela
m
kg
s
A
K
Mol
cd
Vorsatzzeichen (vor der physikalischen Einheit)
Zehnerpotenz
Abk.
Bezeichnung
10-12
10-9
p
Piko
n
Nano
10-6
µ
Mikro
10-3
m
Milli
10-2
c
Zenti
10-1
d
Dezi
100
h
Hekto
k
Kilo
10+6
M
Mega
10+9
G
Giga
Runden auf n Stellen hinter dem Komma
(n+1) -te Stelle
(n) -te Stelle
0, 1, 2, 3 oder 4
5, 6, 7, 8 oder 9
unverändert
um 1 erhöhen
1.4
Literatur:
1.3
10+2
10+3
Formelsammlung (freiwillig):
Gieck: technische Formelsammlung ISBN 3-920379-21-7
Formelzeichen
Aufgabenbuch (obligatorisch):
Lindner: physikalische Aufgaben ISBN 3-446-21758-4
1.2
Grösse
Theorieblätter (freiwillig):
können als pdf-Datei von der Schülerseite (www.hellinge.ch.vu) geladen werden
Physikalische Grössen wie die Kraft haben eine Einheit, für die Kraft die Einheit [N]. Diese Einheiten
lassen sich auf insgesamt 7 sogenannte SI-Einheiten zurückführen. 1 N lässt sich darstellen als 1
2
kg*m/s .
Genauigkeit von Messwerten und Ergebnissen
Für die Rechnung immer maximale Genauigkeit verwenden, keine gerundeten Zwischenergebnisse für
weitere Berechnungen verwenden.
Messwerte stellen gerundete Zahlen dar. Es macht daher keinen Sinn ein Ergebnis mit grösserer
Genauigkeit anzugeben. Die Anzahl gültiger Ziffern des anzugebenden Ergebnisses sollte um 1 grösser
sein als die kleinste Anzahl gültiger Ziffern der verwendeten Messwerte (Runden!). In der Regel reichen 3
gültige Ziffern.
-2-
Theorieblätter Physik Stefan Hellinge August 03
2
Wärmelehre
2.1
Temperaturskalen
Die Temperatur kann in Grad Celsius (C°) oder in Kelvin (K) angegeben werden. Eine Temperatur von
37°C entspricht einer Temperatur von 310.15K. Eine Temperaturerhöhung von 37°C auf 38°C entspricht
einer Temperaturerhöhung von 1K.
Wasser
kocht
100 °C
373.15 K
37 °C
310.15 K
0 °C
273.15 K
Wasser
gefriert
Angabe
Formel
Temperatur Grad Celsius
Temperatur Kelvin
Temperaturdifferenz
t in °C
T in K
∆T in K
Umrechnung von Temperaturangaben in Grad
Celsius (C°) nach Kelvin (K)
t [°C] + 273.15 = T [K]
2.2
2.2.1
Umrechnung von Temperaturangaben in Kelvin
(K) nach Grad Celsius (C°)
-269.15 °C
4K
-270.15 °C
3K
-271.15 °C
2K
-272.15 °C
1K
-273.15 °C
0 K absoluter
T [K] - 273.15 = t [°C]
Nullpunkt
Ausdehnung
Ausdehnung Festkörper
Feststoffe und Flüssigkeiten dehnen sich bei einer Temperaturerhöhung in der Regel aus. Das
materialspezifische
Ausdehnungsverhalten
eines
Feststoffes
wird
durch
den
Längenausdehnungskoeffizienten α beschrieben. Dabei ist die Temperaturdifferenz ∆T positiv bei
Erwärmung und negativ bei Abkühlung. Damit ist die Änderung der Länge
∆l = l 0 * α * ∆T
und die neue Länge ergibt sich zu
l1 = l 0 * (1 + α * ∆T ) mit ∆T = T1 − T0
mit
l0:
α:
T0:
Länge vor Temperaturänderung [m],
Längenausdehnungskoeffizient [1/K],
Temperatur vorher [K oder °C],
l1:
∆T:
T1:
Länge nach Temperaturänderung [m]
Temperaturänderung [K]
Temperatur nachher [K oder °C]
Die Volumenänderung bei Festkörpern kann mit folgender Formel näherungsweise berechnet werden.
V1 ≈ V0 * (1 + 3 * α * ∆T ) mit ∆T = T2 − T1
mit
3
V0:
Volumen vor Temperaturänderung [m ]
V1:
Volumen nach Temperaturänderung [m ]
3
-3-
Theorieblätter Physik Stefan Hellinge August 03
2.2.2
Ausdehnung Flüssigkeiten
Das Ausdehungsverhalten von Flüssigkeiten wird durch den Volumenausdehnungskoeffizienten γ
beschrieben.
V1 ≈ V0 * (1 + γ * ∆T )
3
Volumen vor Temperaturänderung [m ]
Volumen nach Temperaturänderung [m3]
Volumenausdehnungskoeffizient [1/K]
Temperaturänderung [K]
Temperatur vorher [K oder °C]
Temperatur nachher [K oder °C]
mit
V0:
V1:
γ:
∆T:
T0:
T1:
2.2.3
Ausdehnung Gase (Gasgesetz)
Auch Gase dehnen sich bei Temperaturerhöhung aus. Im Gegensatz zu Festkörpern und Flüssigkeiten sind
Gase leicht komprimierbar. Dieses Verhalten muss beispielsweise bei Erwärmung von Gasen in
geschlossenen Behältern berücksichtigt werden.
Der Zustand einer Gasmenge wird durch die physikalischen Grössen Volumen, Temperatur und Druck
festgelegt. Bei einer Zustandsänderung (Zustand 1 zu Zustand 2) muss die betrachtete Gasmenge (Masse)
unverändert bleiben (kein Gasverlust!).
p1 * V1 p 2 * V2
=
T1
T2
mit
V1:
V2:
p1:
p2:
T1:
T2:
Volumen Zustand 1 [m3]
Volumen Zustand 2 [m3]
Druck Zustand 1 [Pa]
Druck Zustand 2 [Pa]
Temperatur Zustand 1 [K]
Temperatur Zustand 2 [K]
Bei einigen Zustandsänderungen bleibt ein Parameter unverändert. Dieser entfällt dann in der Berechnung.
konstanter
Parameter
Temperatur
Druck
Volumen
Zustandsänderung
isotherm
isobar
isochor
Beispiel
Komprimieren und anschliessendes Abkühlen
Volumen mit leicht beweglichem Kolben
Autoreifen
Zur Berechnung der Gasmasse wird die Normdichte (Dichte bei 1013hPa und 0°C) des Gases angegeben.
Die Masse errechnet sich dann zu
m = ρ *V
mit
m:
ρ:
V:
Masse der eingeschlossenen Gasmenge [kg]
3
Normdichte des Gases [kg/m ]
3
Gasvolumen [m ]
-4-
Theorieblätter Physik Stefan Hellinge August 03
2.3
Kalorimetrie
2.3.1
Wärmemenge bei Temperaturänderung
Je höher die Temperatur eines Stoffes ist, desto mehr Energie in Form von Wärme enthält er. Das gilt für
Feststoffe, Flüssigkeiten und Gase. Die pro kg Stoffmenge und pro Grad K Temperaturerhöhung notwendige
Wärmemenge wird mit der stoffspezifischen Wärmekapazität c angegeben.
∆Q = m * c * ∆T mit ∆T = T2 − T1
∆Q:
mit
m:
c:
∆T:
T1:
T2:
2.3.2
Änderung des Wärmeinhalts [J]
(+ zugeführte Wärmemenge, - abgeführte Wärmemenge)
Stoffmasse [kg]
spezifische Wärmekapazität [J/kgK]
Temperaturänderung [K], (+ Temperaturzunahme, - Abkühlung)
Temperatur vorher [K]
Temperatur nachher [K]
Wärmemenge bei Aggregatzustandsänderung
Bei Phasenübergängen, also immer dann wenn sich der Aggregatzustand eines Stoffen ändert wird Wärme
zu- oder abgeführt. Bei diesem Vorgang bleibt die Temperatur konstant. Die Schmelz- bzw
Verdampfungswärme ist stoffabhängig.
∆Q = m * q für schmelzen, erstarren
∆Q = m * r für verdampfen, kondensieren
∆Q:
mit
m:
q:
r:
2.3.3
gasförmig
Wärmemenge [J],
(+ zugeführte Wärmemenge,
- abgeführte Wärmemenge)
Stoffmasse [kg]
Schmelzwärme [J/kg]
Verdampfungswärme [J/kg]
schmelzen
fest
erstarren
flüssig
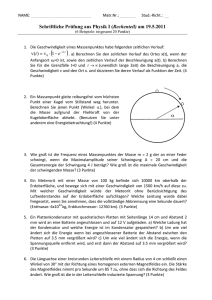
Wärmemenge bei Temperaturänderung und Aggregatzustandsänderung
Betrachtet man Temperatur und zugeführte Wärmemenge für einen Feststoff, dann kommt man zu
folgendem Diagramm:
Temperatur
Feststoff
Siedetemperatur
FeststoffFlüssigkeitsgemisch
FlüssigkeitGasgemisch
Flüssigkeit
Gas
Gemisch
Schmelztemperatur
zugeführte
Wärmemenge
Erwärmen
Feststoff
Q = m*cfest*∆T
Schmelzen
Feststoff
Q = m*q
Erwärmen
Flüssigkeit
Q = m*cfl*∆T
Verdampfen
Flüssigkeit
Q = m*r
-5-
Erwärmen
Gas
Q = m*cgas*∆T
Theorieblätter Physik Stefan Hellinge August 03
Der Feststoff wird zunächst bis zu seinem Schmelzpunkt erwärmt. Von dem Moment an dem der Feststoff
zu schmelzen beginnt bis zu dem Moment an dem alles geschmolzen ist bleibt die Temperatur konstant
(Schmelz-/Erstarrungstemperatur). Die Energie wird zur Überwindung der Gitterkräfte im Feststoff
verwendet. Bei weiterer Wärmezufuhr wird die nun vorhandene Flüssigkeit erwärmt, bis sie beginnt zu
verdampfen. Ab diesem Moment bleibt die Temperatur wieder konstant bis der gesamte Stoff verdampft ist
(Siedetemperatur). Die Energie wird zur Überwindung der Kohäsionskräfte der Flüssigkeit benötigt. Durch
weitere Wärmezufuhr wird dann das vorhandene Gas erwärmt. Der gesamte Temperaturverlauf (von rechts
nach links) ergibt sich in umgekehrter Reihenfolge bei Wärmeentzug eines Stoffes.
2.3.4
Wärmemischung ohne Aggregatzustandsänderungen
Werden mehrere Stoffe (Stoff1, Stoff2, ...) unterschiedlicher Temperatur miteinander gemischt, dann stellt
sich nach Abklingen von Ausgleichsvorgängen eine Mischtemperatur ein. Der wärmere Stoff gibt dabei
Wärmeenergie an den kälteren Stoff ab. Unter der Voraussetzung, dass keine Wärme an die Umgebung
abgegeben wird ist also die Summe aller abgegebenen (-) und aufgenommenen (+) Wärmemengen gleich
Null.
∆Q1 + ∆Q2 + ... = 0
mit
∆Q1, ∆Q2:
zu-/abgeführte Wärmemenge von Stoff1, Stoff2 [J]
Ersetzt man die Wärmemengen durch den Ausdruck ∆Q = m * c * ∆T und ∆T = Tm − T dann erhält man
eine Gleichung, welche man nach der jeweils gesuchten Grösse auflösen kann.
m1 * c1 * Tm − m1 * c1 * T1 + m2 * c 2 * Tm − m2 * c 2 * T2 + ... = 0
mit
m1, m2:
c 1, c 2:
T1, T2:
Tm:
Masse von Stoff1, Stoff2 [kg]
spezifische Wärmekapazität von Stoff1, Stoff2 [J/kgK]
Anfangstemperatur von Stoff1, Stoff2 [K oder °C]
Mischtemperatur [K oder °C]
2.3.5
Wärmemischung mit Aggregatzustandsänderungen
Übergiesst man ein Stück Eis mit warmem Wasser, so schmilzt zumindest ein Teil des Eises und das
Wasser kühlt sich ab. Oder aber die Eismasse ist so gross und die Eistemperatur so tief, dass zumindest ein
Teil des Wassers gefriert. Auch in diesem Fall gilt dass die Summe der ausgetauschten Wärmemengen
gleich Null ist, vorausgesetzt es geht keine Wärme an die Umgebung verloren. Eine sich aus diesem Ansatz
ergebende Gleichung ist schlecht zu handhaben, da man nicht weiss welcher Anteil von welchem Stoff
seinen Aggregatzustand ändert und dies zu zusätzlichen Variablen in der Gleichung führt. Einfacher ist die
folgende Vorgehensweise, welche anhand von obigem Beispiel gezeigt werden soll:
Zunächst wird berechnet, welche Wärmemenge das warme Wasser (Temperatur tw, Menge mw) maximal
abgeben kann, wenn es bis auf 0°C abgekühlt wird:
∆Qw = m w * c w * (0°C − ϑ w )
max. Wärmeabgabe Wasser
-6-
Theorieblätter Physik Stefan Hellinge August 03
Dann wird die zum Erwärmen und Schmelzen des gesamten Eises erforderliche Wärmemenge berechnet:
∆QEe = m E * c E * (0°C − ϑ E )
Eis erwärmen
∆QEs = m E * q E
Eis schmelzen
Bereits an diesem Punkt kann man abschätzen was passiert. Hier zwei Beispiele:
∆QW > ∆QEe + ∆QEs :
Alles Eis schmilzt, der Energieüberschuss wird in der Berechnung zur Erwärmung der gesamten
Wassermasse verwendet.
∆QW > ∆QEe und ∆QW < ∆QEe + ∆QEs :
Das Eis wird bis auf 0°C erwärmt. Ein Teil des Eises wird mit der verbleibenden Energie geschmolzen. Es
ergibt sich ein Eis-Wasser-Gemisch mit einer Temperatur von 0°C.
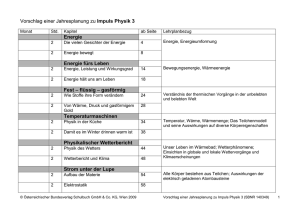
2.3.6
Wärmetransport
Es existieren drei Möglichkeiten, Wärme direkt zu transportieren, Wärmestrahlung, Wärmekonvektion und
Wärmeleitung. Wir beschäftigen uns hier mit der Wärmeleitung. Wärmeleitung ist die Weitergabe von
thermischer Bewegungsenergie. In Metallen passiert dies sehr schnell, sie sind gute Wärmeleiter, ruhende
Gase dagegen leiten die Wärme sehr schlecht. Betrachten wir den Wärmedurchgang durch eine Wand,
dann stellen wir fest, dass die Wärmemenge zunimmt mit der Temperaturdifferenz ausserhalb und innerhalb
der Wand, mit der Fläche der Wand, mit der Zeit und mit abnehmender Wanddicke.
Q
= k * A * ∆T
t
mit
Q/t:
k:
A:
∆T:
∆T
Wärmemenge pro Zeit [J/s] (Leistung)
2
Wärmedurchgangskoeffizient [W/m *K]
2
Fläche für Wärmedurchgang [m ]
Temperaturdifferenz zwischen
Aussen- undInnenseite der Fläche A [K]
α1
α2
k1
k2
Der Wärmedurchgangskoeffizient k beinhaltet die stofflichen Eigenschaften und die Dicken der
verschiedenen Materialschichten einer Wand. Ausserdem beinhaltet der Wärmeübergangskoeffizient α
Informationen über den Wärmetransport in der angrenzenden Luftschicht oder Flüssigkeit und damit über die
Wärmekonvektion in diesem Bereich. Der Wärmedurchgangskoeffizient berechnet sich
für eine Wandschicht aus k =
mit
α:
d:
λ:
λ
bzw für die angrenzende Luftschicht aus kα = α
d
Wärmeübergangskoeffizient Gas oder Flüssigkeit [W/m2K]
Dicke der Stoffschicht [m]
Wärmeleitfähigkeit des Stoffes [W/mK]
Der Kehrwert des Wärmedurchgangskoeffizienten k aller Schichten zusammen berechnet sich aus den
Wärmedurchgangskoeffizienten der einzelnen Schichten
1 1
1
1
1
=
+ +
+ ... +
k α 1 k1 k 2
α2
Je grösser k ist, desto mehr Wärme wird transportiert, desto schlechter isoliert beispielsweise eine Wand.
-7-
Theorieblätter Physik Stefan Hellinge August 03
3
Mechanik
3.1
Kinematik
3.1.1
Massenpunkt / Inertialsystem
Bei der Bewegung von Körpern wie z. B. einem fahrenden Auto
betrachtet man bei der Beschreibung des Bewegungsablaufs nur
den Schwerpunkt des Körpers. Man tut so als sei die gesamte
Masse des Körpers in dessen Schwerpunkt vereinigt.
Ausserdem legt man vor der Beschreibung einer Bewegung den
Standpunkt des Beobachters fest (Inertialsystem). Von diesem
Punkt aus beschreibt man die Position des bewegten Objekts
wie auch dessen Geschwindigkeit in Bezug zum Beobachter. Ein
direkt beim Beobachter startendes Fahrzeug zum Beispiel startet
also bei der Position s = 0m, ein den Beobachter überholendes
Fahrzeug hat demnach eine Geschwindigkeit, welche dem
Geschwindigkeitsunterschied
zwischen
Beobachter
und
überholendem Fahrzeug entspricht.
3.1.2
Weg/Zeit-Diagramm (s/t-Diagramm)
Trägt man auf der x-Achse die Zeit t und auf der y-Achse den Weg s auf, dann kann man aus dem
Diagramm ablesen, wann wer wo ist.
3.1.3
{
{
Je steiler eine Linie ist, desto schneller bewegt sich das Objekt. Sich
überschneidende Kurven bedeuten, dass sich zwei Objekte zur gleichen Zeit am
gleichen Ort befinden.
s
Strecke s
Waagerechte Linien: Das Objekt bewegt sich nicht
Ansteigende Linien: Das Objekt bewegt sich vom Beobachter weg
Abfallende Linien: Das Objekt bewegt sich auf den Beobachter zu
t
Zeitintervall
Geschwindigkeits/Zeit-Diagramm (v/t-Diagramm)
Trägt man auf der x-Achse die Zeit t und auf der y-Achse die Geschwindigkeit v eines Objekts auf, dann
kann man aus dem Diagramm ablesen, wann wer wie schnell ist.
v
Strecke s
{
Waagerechte Linien: Das Objekt bewegt sich mit konstanter
Geschwindigkeit (oder steht still)
Ansteigende Linien: Das Objekt bewegt sich schneller werdend vom
Beobachter weg oder langsamer werdend auf diesen zu
Abfallende Linien: umgekehrt
t
Zeitintervall
Sich überschneidende Kurven bedeuten, dass zwei Objekte zur gleichen Zeit gleich schnell sind.
Eine weitere wichtige Information im v/t-Diagramm stellt die Fläche zwischen der Geschwindigkeitskurve und
der Zeitachse dar. Die Fläche stellt die in einem Zeitintervall ∆t zurückgelegte Strecke dar. Die
Streckenberechnung reduziert sich daher auf eine einfache Flächenberechnung (mit dazugehörigen
Einheiten!).
-8-
Theorieblätter Physik Stefan Hellinge August 03
3.1.4
Gleichförmige Bewegung (konstante Geschwindigkeit)
Wenn sich die Geschwindigkeit nicht ändert, dann spricht man von einer gleichförmigen Bewegung eines
Objekts. Die pro Sekunde (oder allgemeiner pro Zeitintervall) zurückgelegte Strecke berechnet sich dann
aus
s = v *t
mit
3.1.5
s:
v:
t:
Strecke [m]
Geschwindigkeit [m/s]
Zeit [s]
Gleichförmige Kreisbewegung (konstante Geschwindigkeit)
Im Zusammenhang mit der Kreisbewegung soll an dieser
Stelle nur kurz auf einige Begriffe eingegangen werden.
Als Drehfrequenz bzw Drehzahl eines rotierenden Körpers
bezeichnet man die Anzahl ausgeführter Umdrehungen pro
Zeiteinheit. Häufig hat die Drehzahl die Einheit 1/min und
sollte für weitere Berechnungen in 1/sec umgerechnet
werden.
Die
Umfangs-geschwindigkeit,
also
die
Geschwindigkeit mit der sich der Körper auf der Kreisbahn
bewegt berechnet sich aus
vu = 2π * r * n
mit
vu:
r:
n:
Umfangsgeschwindigkeit [m/s]
Radius der Kreisbahn [m]
Drehzahl [1/s]
Die Winkelgeschwindigkeit ω gibt den pro Sekunde überstrichenen Winkel in Bogenmass an und wird mit der
Formel
ω = 2π * n
3.1.6
Überlagerung von Bewegungen
zu
Die
der
der
Die einzelnen Bewegungen werden vektoriell addiert. Der
resultierende Vektor ist die von einem ruhenden Beobachter
gesehene Bewegung.
r r r
vr = ve + vm
mit
vr:
ve:
vm:
resultierende Geschwindigkeit
Eigengeschwindigkeit
Geschwindigkeit des umgebenden Mediums
-9-
nde
ere g
ulti
res egun
w
Be
Ein Schwimmer, welcher versucht über einen Fluss
schwimmen wird durch die Wasserbewegung abgetrieben.
vom Ufer aus beobachtete Bewegung resultiert aus
Überlagerung der Bewegung des Wassers und aus
Eigenbewegung des Schwimmers gegenüber dem Wasser.
Eige
n
Sch bewegu
wim
mer ng
berechnet.
Flussbewegung
Theorieblätter Physik Stefan Hellinge August 03
Nachdem Erstellen einer Skizze lassen sich Geschwindigkeiten und Winkel mit der Trigonometrie
berechnen.
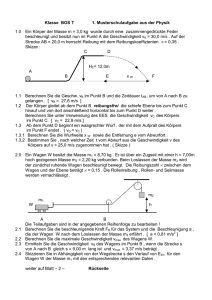
3.1.7
Gleichförmig beschleunigte Bewegung
Rollt beispielsweise ein Fahrzeug reibungsfrei eine Strasse (mit konstantem Gefälle) herunter, dann nimmt
die Geschwindigkeit in jeder Sekunde um den gleichen Betrag zu. Diese Geschwindigkeitszunahme nennt
man konstante Beschleunigung. Im vt-Diagramm ergibt sich eine Gerade mit einer Steigung ungleich Null.
Die Beschleunigung berechnet sich aus
v
a:
∆v:
∆t:
{
2
Beschleunigung [m/s ]
Änderung der Geschwindigkeit [m/s]
Zeitintervall [s]
Strecke s
{
mit
Geschwindigkeitsänderung
∆v
a=
∆t
t
Zeitintervall
und gibt somit die Steigung der Geraden im vt-Diagramm an (vgl. Math.: Steigung einer Geraden). Negative
Werte für die Beschleunigung bedeuten Geschwindigkeitsabnahme. Die während eines
Beschleunigungsvorgangs zurückgelegte Strecke lässt sich mit Hilfe des vt-Diagramms berechnen, indem
die Fläche zwischen der Geschwindigkeitskurve und der Zeitachse bestimmt wird (mit Einheiten rechnen!).
3.1.8
Freier Fall
Alle folgenden Bewegungen werden in einem rechtwinkligen Koordinatensystem
betrachtet. Die Vorzeichen der Positionen (Werte für x und y) und Geschwindigkeiten
(Werte für vx und voy) sind damit festgelegt.
vy
t
Für den freien Fall gibt es nur Bewegungskomponenten in y-Richtung. Alle möglichen
Positionen liegen abgesehen vom Startpunkt unterhalb der x-Achse. Die y-Werte und
die Werte für die Geschwindigkeit haben also negative Vorzeichen. Position und
Geschwindigkeit lassen sich mit Hilfe
1. der Definition der Beschleunigung und
2. der Fläche zwischen Geschwindigkeitsverlauf und Zeitachse im vt-Diagramm
berechnen.
3.1.9
senkrechter Wurf
vy
Auch hier gibt es nur Bewegungskomponenten in y-Richtung, aber es
sind auch positive Werte möglich. Oberhalb der Abwurfstelle haben die vy0
Positionen ein positives Vorzeichen. Bewegungen nach oben ergeben
positive Geschwindigkeitswerte. vyo ist die Abwurfgeschwindigkeit.
Position und Geschwindigkeit lassen sich mit Hilfe
1. der Definition der Beschleunigung und
2. der Fläche zwischen Geschwindigkeitsverlauf und Zeitachse im vtDiagramm
berechnen.
- 10 -
Scheitelpunkt
t
Theorieblätter Physik Stefan Hellinge August 03
3.1.10 horizontaler Wurf
vx
vy
Der
horizontale
Wurf
mit
der
Anfangsgeschwindigkeit vx setzt sich aus
t
t
einer Bewegung in y-Richtung (freier Fall)
t
und einer Bewegung in x-Richtung
(gleichförmige
Bewegung
mit
der
Geschwindigkeit vx) zusammen. Beide
Komponenten sind über die Zeit verknüpft.
Berechnung von Position und Geschwindigkeiten werden mit Hilfe der vt-Diagramme durchgeführt.
3.1.11 Schiefer Wurf
t
vy
vx
vy0
Scheitelpunkt
Der schiefe Wurf setzt sich aus einer
Bewegung in y-Richtung (senkrechter
t
Wurf mit Anfangsgeschwindigkeit vyo) und
t
t
t
einer
Bewegung
in
x-Richtung
(gleichförmige
Bewegung
mit
der
Geschwindigkeit vx) zusammen. Beide
Komponenten sind über die Zeit
miteinander verknüpft. Aus dem Abwurfwinkel α und der Abwurfgeschwindigkeit vo ergeben sich zunächst
die beiden Geschwindigkeitskomponenten vx und vyo.
v x = v 0 * cos α
v y 0 = v 0 * sin α
Dann können Position und Geschwindigkeit mit Hilfe der vt-Diagramme berechnet werden.
- 11 -
Theorieblätter Physik Stefan Hellinge August 03
3.2
3.2.1
Dynamik
Gewichtskraft
Jeder Körper wird durch die Erde angezogen (Gravitationskraft). Auf der Erdoberfläche nennt man diese
Kraft Gewichtskraft. Sie berechnet sich nach der Formel
FG = m * g
mit
FG:
m:
g:
Gewichtskraft [N]
Masse des Körpers [kg]
Erdbeschleunigung 9.81m/s2
3.2.2
Reibungskraft
Man unterscheidet zwischen vier Reibungskräften, wobei die ersten drei nach ein und derselben Formel
berechnet werden können:
FR = µ * FN
FR: Reibungskraft [N]
µ:
Reibungskoeffizient
FN: Normalenkraft (senkrecht zur Reiboberfläche) [N]
Der Wert für µ ist abhängig von der Art der Reibung (rollende, gleitende Bewegung oder Haftung) und von
der Materialpaarung der aufeinander liegenden Oberflächen. Mit den Werten für Haftreibung wird die
maximal durch Reibung übertragbare Kraft berechnet. Die Normalenkraft entspricht in der waagerechten
Ebene der Gewichtskraft.
mit
Die Luftreibung erzeugt eine Kraft, welche mit zunehmender Relativgeschwindigkeit grösser wird. Sie
berechnet sich zu
FL = c w * A *
mit
FL:
cw:
A:
ρ:
v:
ρ 2
*v
2
Reibungskraft [N]
Formfaktor
Fläche senkrecht zur Relativbewegung [m2]
Dichte der Luft [kg/m3]
Relativgeschwindigkeit Körper/Luft [m/s]
Beispiele für Formfaktoren:
Kugel
Kreisscheibe
Halbkugel vorn offen
Halbkugel hinten offen
3.2.3
0.45
1.1
1.4
0.35
Hangabtriebskraft
Ein Körper der Masse m befinde sich auf einer schiefen Ebene mit dem Neigungswinkel α. Entsprechend
seiner Masse wirkt auf ihn eine Gewichtskraft FG senkrecht nach unten. Diese verursacht eine Kraft, welche
den Körper die Ebene abwärts schiebt (Hangabtriebskraft FH) und eine Kraft, welche den Körper senkrecht
auf die Ebenenfläche drückt (Normalenkraft FN) und somit eine Reibungskraft verursacht. Die einzelnen
Kräfte berechnen sich wie folgt:
- 12 -
Theorieblätter Physik Stefan Hellinge August 03
Hangabtriebskraft
FH = FG * sin α
Normalenkraft (wird nur zur Berechnung der Reibungskraft benötigt)
FN = FG * cos α und damit Reibungskraft FR = µ * FN
Fh
α
Fn
Fg
3.2.4
Trägheitskraft
Trägheit ist das Bestreben eines Körpers, seinen momentanen Bewegungszustand (Geschwindigkeit und
Richtung) beizubehalten. Wird also ein Körper der Masse m beschleunigt oder abgebremst, so wirkt die
Trägheitskraft der Bewegungsänderung a entgegen. Diese Kraft FT berechnet sich zu
FT = m * a
mit
FT :
m:
a:
Trägheitskraft [N]
Masse [kg]
Beschleunigung [m/s2]
3.2.5
Berechnungen mit Reibungskräften, Hangabtriebs- und Trägheitskraft
Um beispielsweise den Bremsweg an einer abfallenden Strasse zu berechnen oder die Endgeschwindigkeit
beim Herabrollen von einem Hang kann man wie folgt vorgehen. Zunächst werden die in oder gegen
Fahrtrichtung wirkenden Kräfte zusammengefasst (ohne Trägheitskraft!)
A:
B:
Summe aller “antreibenden“ Kräfte (Motorkraft an den Antriebsrädern, Hangabtriebskraft bei Fahrt
bergab ...)
Summe aller “bremsenden“ Kräfte (Luftwiderstand, Rollreibung, Hangabtriebskraft bei Fahrt bergauf
...)
Die Trägheitskraft (und damit Beschleunigung ... gemäss Kapitel “gleichförmig beschleunigte Bewegung“)
berechnet sich dann zu
FT = A − B
3.2.6
Fliehkraft
Fährt man mit einem Fahrzeug in eine Kurve, so wird man scheinbar nach aussen gedrückt. Diese Kraft
nennt man Fliehkraft. In Wirklichkeit ist die Fliehkraft nichts anderes als die Trägheitskraft. Der Körper erfährt
bei einer Kreisbewegung eine permanente Richtungsänderung seiner Bewegung in Richtung
Kreismittelpunkt. Die Kraft kann mit der Formel
m * vu
Fz =
r
mit
2
m: Masse des Körpers [kg]
vu: Umfangsgeschwindigkeit [m/s]
r: Radius der Kreisbahn [m]
- 13 -
Theorieblätter Physik Stefan Hellinge August 03
3.3
3.3.1
Energie und Arbeit
mechanische Arbeit
Wird ein Gegenstand entlang einer Strecke s mit der Kraft F geschoben, dann wird mechanische Arbeit
verrichtet. Die allgemeine Formel zur Berechnung dieser Arbeit lautet:
W = F *s
mit
W:
F:
s:
mechanische Arbeit [J]
Kraft [N]
Weg [m]
Kraft und Weg müssen parallel verlaufen, andernfalls sind die entsprechenden Komponenten zu berechnen.
Mit dieser Formel lassen sich Reibarbeit und Arbeit an der schiefen Ebene berechnen und die anderen Arten
von mechanischer Arbeit herleiten.
3.3.2
Hubarbeit
Beim Heben einer Masse m wird Hubarbeit verrichtet. Die Kraft ist hier die Gewichtskraft FG der Masse und
der Weg die Höhe h.
WHub = m * g * h
mit
WHub: Hubarbeit [J]
m:
Masse [kg]
h:
Höhe [m]
Es spielt dabei keine Rolle, ob z.B. eine Masse eine Treppe hinaufgetragen oder von aussen der Hauswand
entlang hochgezogen wird. Entscheidend ist die Höhe.
3.3.3
Beschleunigungsarbeit
Zum Beschleunigen eines Fahrzeuges muss Arbeit verrichtet werden. Auch hierbei wirkt entlang der
Beschleunigungsstrecke eine Kraft, die Trägheitskraft. Die Beschleunigungsarbeit kann daher aus der
Formel für mechanische Arbeit hergeleitet werden und ergibt sich zu:
WB =
1
* m * v2
2
mit
WB:
m:
v:
Beschleunigungsarbeit [J]
Masse [kg]
Geschwindigkeit [m/s]
3.3.4
Leistung
Eine zu verrichtende Arbeit kann langsam über einen grossen Zeitraum erledigt werden oder schnell in
kurzer Zeit. Im ersten Fall ist die Leistung klein, im zweiten gross. Die Leistung ist also im Gegensatz zur
Arbeit zeitabhängig und errechnet sich wie folgt:
P=
W F *s
=
= F *v
t
t
- 14 -
Theorieblätter Physik Stefan Hellinge August 03
mit
P:
W:
t:
v:
Leistung [W]
Arbeit [J]
Zeit [s]
Geschwindigkeit (wenn const.) [m/s]
Eine noch gebräuchliche Einheit für die Leistung ist die Pferdestärke PS. Ein PS entspricht der Leistung von
736 Watt.
3.3.5
Energie / Energieerhaltungssatz
Energie ist gespeicherte Arbeit oder die Fähigkeit Arbeit zu verrichten. Man könnte es auch so formulieren:
Arbeit ist der Vorgang,
Energie ist der Zustand.
Wird also beim Heben eines Körpers an diesem eine Arbeit von 1000J verrichtet, dann hat der Körper nach
dem Heben eine Höhenenergie von 1000J. Zur Berechnung der Energie werden daher die gleichen Formeln
wie zur Berechnung der Arbeit verwendet, wobei W durch die entsprechende Abkürzung E ersetzt wird.
Arbeit
Energie
Reibarbeit W
Wärmemenge Q
Hubarbeit WHub
Höhenenergie, potentielle Energie Epot
Beschleunigungsarbeit WB
Bewegungsenergie, kinetische Energie Ekin
Bei allen physikalischen oder chemischen Prozessen gilt der Energieerhaltungssatz: In einem
abgeschlossenen (also „energiedichten“) System ist die Summe aller Energien vor dem Prozess gleich der
Summe aller Energien nach dem Prozess. Für den freien Fall gilt beispielsweise, dass die potentielle
Energie vor dem Fall gleich gross sein muss wie die kinetische Energie am Ende des Falls.
3.3.6
Wirkungsgrad
Den Wirkungsgrad eines Systems kann man anschaulich definieren als
Wirkungsgrad =
Nutzen
Aufwand
oder durch die entsprechenden Verhältnisse der Leistungen, Arbeit oder Energie:
η=
Pab W Nutz E Nutz
=
=
Pzu
W zu
E zu
- 15 -
Theorieblätter Physik Stefan Hellinge August 03
3.4
3.4.1
Statik
Drehmoment
Kraftwirkungslinie
Beim Anziehen oder Lösen einer Schraube mit einem Gabelschlüssel
wirkt eine Kraft auf einen Hebel und verursacht damit ein Drehmoment
auf die Schraube. Das Drehmoment M lässt sich berechnen als
Produkt von Hebelarmlänge l und der senkrecht (!) dazu wirkenden
Kraft F:
Hebelarm l
M = F *l
mit
M:
F:
l:
Kraft F
Drehmoment [Nm]
Kraft in [N]
wirksame Hebelarmlänge in [m]
Die Wirkungslinie der Kraft und der Hebelarm müssen senkrecht aufeinander stehen. Wenn dies nicht der
Fall ist dann bestimmt man den Abstand der Wirkungslinie der Kraft vom Drehpunkt. Dies ist dann der
wirksame Hebelarm.
3.4.2
Hebel
Es gibt einseitige Hebel wie z.B. eine Brechstange und zweiseitige F1
Hebel wie z.B. eine Zange. Jeder am Hebel angreifenden Kraft ist
ein Hebelarm (Abstand der Wirkungslinie der Kraft zum Drehpunkt)
zugeordnet. Die Summe aller Momente ist gleich Null. Zur
Berechnung einer Kraft oder eines Hebelarmes stellt man zunächst
folgende Gleichung auf:
F2
l1
l2
Σ rechtsdrehende Momente = Σ linksdrehende Momente
∑M
r
F1
= ∑Ml
l1
l2
Dann kann nach der gesuchten Grösse aufgelöst werden. Auch hier
ist zu beachten, dass Kraft und Hebelarm senkrecht aufeinander
stehen.
F2
Hinweis: es wird immer nur ein Objekt betrachtet, die Richtung der Kräfte ergibt sich aus der Sicht dieses
Objekts!
3.4.3
Auflagerkräfte
Die Verteilung der Gewichtskraft eines Fahrzeugs auf die Räder hängt von
der Lage des Fahrzeug-Schwerpunktes ab. Das Hebelgesetz erlaubt die
Berechnung dieser Kräfte. Geschickterweise legt man die Position des
Drehpunkts in den Angriffspunkt der einen von zwei unbekannten Kräfte
und macht somit dieses Drehmoment zu Null. Dann kann die zweite Kraft
mit Hilfe des Hebelgesetzes berechnet werden.
Fg
F1
- 16 -
F2
Theorieblätter Physik Stefan Hellinge August 03
3.4.4
Kräfteaddition
Angenommen man hält ein zusammengeknotetes
Bündel Seile in der Hand, an dem mehrere Personen mit
unterschiedlicher Kraft und Richtung ziehen. Mit
geschlossenen Augen nimmt man jedoch nur eine Kraft
und eine Richtung der Kraftwirkung wahr. Diese
entspricht der resultierenden Kraft, wenn man alle Kräfte
geometrisch (vektoriell !) addiert. Dazu gibt es 1
graphische und zwei rechnerische Möglichkeiten (ich
empfehle Möglichkeit 2 und 3 anhand von Aufgaben
auszuprobieren und die genehmste in Zukunft
anzuwenden)
F1
Fr
F2
F3
Möglichkeit 1: (zeichnerisch)
Massstab wählen (z.B. 10N/cm)
Alle zu addierenden Kräfte so verschieben, dass sie eine
Kette bilden (Addition von Vektoren)
Die Resultierende zeichnen (Anfang der Kette = Anfang
der Resultierenden, Ende der Kette = Ende der
Resultierenden)
F1
F2
F3
Fr
Dieses Verfahren funktioniert auch indem einzelne Vektoren addiert und die Resultierende jeweils mit der
nächsten noch nicht verwendeten Kraft addiert wird.
Möglichkeit 2: (mit cos-Satz)
F2
Beginnend mit 2 Vektoren diese so verschieben, dass sie
F1
F3
eine Kette bilden (F1 und F2)
F12
Die Resultierende (F12) mit dem cos-Satz berechnen (mit
Winkel zwischen F1 und F2)
Fr
Eine dritte Kraft so verschieben, dass sie mit der
Resultierenden eine Kette bildet (F12 und F3)
Die Resultierende (Fr) mit dem cos-Satz berechnen (mit Winkel zwischen F12 und F3)
Nach diesem Verfahren alle Kräfte addieren.
Möglichkeit 3: (Vektorrechnung)
1.
2.
3.
4.
5.
Koordinatensystem festlegen
Die x, y und ggf. z-Komponenten aller Vektoren berechnen
Die x, y, und ggf. z-Komponenten aller Vektoren addieren
Mit Pythagoras den Wert der Resultierenden berechnen
Den Winkel der Resultierenden mit dem Skalarprodukt berechnen
- 17 -
Theorieblätter Physik Stefan Hellinge August 03
3.4.5
Kräftezerlegung
Ein Ausleger wird wie folgt belastet. Die Masse
verursacht eine Belastung der Konstruktion. Wie
gross sind die Kräfte in den beiden Stäben?
F1
Fr
Die Vorgehensweise ist genau umgekehrt wie bei
der Kräfteaddition. Die resultierende Kraft ist
bekannt. Die Addition der unbekannten Kräfte F1
und F2 muss wieder die resultierende Kraft Fr
ergeben.
F2
Aus den Abmessungen der Konstruktion ermittelt
man zunächst die Winkel zwischen den Stäben.
Da die Kräfte in den Stäben bei unseren
Berechnungen nur entlang der Stabachsen
verlaufen (Druck- und Zugkräfte) kennt man nun
die Winkel zwischen den Wirkungslinien der
Kräfte.
Die Wirkungslinien werden nun so eingezeichnet, dass sie jeweils durch den Anfang und durch das Ende
der resultierenden Kraft laufen. Dann werden die Kräfte F1 und F2 so eingezeichnet, dass sie eine Kette
bilden (siehe Kräfteaddition). Die Längen und damit die Werte der Kräfte F1 und F2 werden dann
rechnerisch ermittelt.
α
Wirkungslinie F1
α
ie
li n
gs
un
F2
irk
W
Wirkungslinie F1
irk
W
Winkel berechnen
ie
li n
gs
n
u
F2
Fr
α
Fr
F1
F2
Wirkungslinien einzeichnen
- 18 -
Kräftekette einzeichnen
und Kräfte berechnen
Theorieblätter Physik Stefan Hellinge August 03
3.5
Statik der Fluide
3.5.1
Druck
Der Druck in Flüssigkeiten und Gasen ist keine gerichtete Grösse, er wirkt an einer bestimmten Position von
allen Seiten gleichermassen. Wirkt der Druck auf eine Fläche, dann ergibt sich an dieser Stelle eine Kraft
senkrecht zur Fläche. Diese Kraft lässt sich berechnen aus
F = p* A
mit
F:
p:
A:
Kraft auf die Fläche [N]
Druck [N/m2] oder [Pa]
Fläche [m2]
Die noch gebräuchliche Einheit bar berechnet sich zu
100'000 Pa = 1 bar
3.5.2
hydrostatischer Druck
Beim Tauchen in Wasser spürt man mit zunehmender Tauchtiefe einen wachsenden Druck in den Ohren.
Dieser Druck wird durch die darüberliegende Wassersäule verursacht. Die Formel für die Berechnung des
Schweredrucks lautet
p = h* ρ * g
mit
p:
h:
ρ:
Schweredruck [Pa]
Tauchtiefe [m]
Dichte der Flüssigkeit [kg/m3]
3.5.3
Auftrieb
Ein unter Wasser gehaltener Stein scheint unter Wasser
leichter zu sein als über der Wasseroberfläche. Diesen
Kraftunterschied nennt man Auftrieb. Man kann den Auftrieb
auf zwei verschiedene Arten beschreiben.
1. Möglichkeit: Auf einen vollständig eingetauchten
Körper wirkt in einer Flüssigkeit von allen Seiten ein
von der Eintauchtiefe abhängiger hydrostatischer
Druck. Der Druck auf der Oberseite des Körpers ist
aufgrund der geringeren Eintauchtiefe kleiner als
derjenige auf der Unterseite. Die Kraft ist also auf der
Unterseite grösser als die von oben wirkende Kraft. Die resultierende Differenzkraft zeigt nach oben
und wird als Auftriebskraft FA bezeichnet. Die Seitenkräfte heben sich gegenseitig auf. Für einfache
geometrische Körper lässt sich so der Auftrieb anschaulich berechnen (-> Formel in 2. Möglichkeit,
Herleitung im Unterricht)
2. Möglichkeit: Die Auftriebskraft ist betragsmässig gleich der Gewichtskraft der vom Körper
verdrängten Wassermenge. Diese Beschreibung ist leicht auf kompliziert geformte Körper
anwendbar.
- 19 -
Theorieblätter Physik Stefan Hellinge August 03
Die Formel zur Berechnung der Auftriebskraft eines beliebig geformten Körpers lautet
FA = ρ Fl * VKö * g
mit
FA:
ρFl:
Vkö:
Auftriebskraft [N]
Dichte der Flüssigkeit [kg/m3]
eingetauchter Volumenanteil des Körpers [m3]
Um voraussagen zu können ob ein Körper schwimmt muss man nur die Dichte des Körpers (bei Hohlkörpern
die scheinbare Dichte) und die Dichte der Flüssigkeit vergleichen. Es gilt
ρKö > ρFl : Körper sinkt
ρKö = ρFl : Körper schwebt in der Flüssigkeit
ρKö < ρFl : Körper schwimmt, ein Teil ragt aus der Flüssigkeit
mit
ρKö : Dichte des Körpers
ρFl : Dichte der Flüssigkeit
Als Tauchgewichtskraft bezeichnet man die ´Gewichtskraft´ eines vollständig eingetauchten Körpers, wenn
dessen Dichte grösser als die Dichte der Flüssigkeit ist. Sie berechnet sich aus
Tauchgewichtskraft = Gewichtskraft – Auftriebskraft
- 20 -
Theorieblätter Physik Stefan Hellinge August 03
4
Elektrotechnik
4.1
elektrische Spannung U
Nimmt man zwei elektrisch neutrale metallische Platten, entfernt auf
der einen Platte (1) einige Elektronen und fügt diese der anderen
Platte (2) zu, dann ergibt sich die folgende Situation:
Platte 2
Platte 1
Platte 1 ist aufgrund des Elektronenmangels positiv geladen
Platte 2 ist aufgrund des Elektronenüberschusses negativ
geladen
Um weitere Elektronen von Platte 1 auf Platte 2 zu bringen, müssen
diese entgegen der Anziehungskraft von Platte 1 und entgegen der
abstossenden Kraft der negativ geladenen Platte 2 verschoben
Spannung
werden. Dies entspricht einer mechanischen Arbeit (Kraft mal Weg)
am Elektron. Diese Arbeit nennt man elektrische Spannung. Leider ist diese Definition nicht so einfach zu
verstehen, wenn man sich das erste Mal mit der Elektrotechnik beschäftigt. Daher ist hier noch eine weitere,
nicht ganz präzise Definition angegeben:
Elektrische Spannung ist ein Mass für das Ladungsungleichgewicht zwischen zwei Körpern
Die physikalische Einheit der Spannung ist das Volt, abgekürzt V.
Ladungsverschiebung kann z.B. erzeugt werden durch:
Die oben genannte Kraft für die
die Kraft eines Magnetfeldes auf ein bewegtes Elektron (Induktion: Dynamo, Generator)
die Wechselwirkung zwischen Licht und Materie (Solarzelle)
chemische Prozesse (Batterie, Akkumulator)
mechanische Verformung bestimmter Materialien (Piezoeffekt: Feuerzeugzünder)
4.2
elektrische Stromstärke I
Würde man die im vorigen Kapitel erwähnten Platten über einen Draht miteinander verbinden, dann könnten
die Elektronen von Platte 2 zurück auf die Platte 1 fliessen. Diesen Fluss der Elektronen bezeichnet man als
elektrischen Strom.
Die elektrische Stromstärke ist ein Mass für die Anzahl Ladungsträger pro Zeit.
Die Einheit der elektrischen Stromstärke ist das
Ampère, abgekürzt A. 1 Ampère entspricht einer
Menge von etwa 6*1018 Elektronen, die in einer
Sekunde einen Drahtabschnitt passieren. In
Salzlösungen (Elektrolyte) bewegen sich
anstelle von Elektronen Ionen. Auch hier spricht
man von einem Stromfluss.
4.3
ohmscher Widerstand R
In einem Metall sind die äusseren Elektronen der Metallatome als
Elektronengas zwischen den Atomrümpfen mehr oder weniger frei
beweglich. Die Atomrümpfe setzen der Bewegung der Elektronen einen
Widerstand entgegen. Die Elektronen werden also gebremst. Dieses
Verhalten der Materie kann mit dem Quotienten aus Spannung U
(entspricht der antreibenden Kraft) und der Stromstärke I (Anzahl der
bewegten Elektronen) beschrieben werden.
- 21 -
+
I
R
U
-
Theorieblätter Physik Stefan Hellinge August 03
R=
U
I
oder nach der Spannung U aufgelöst (ohmsches Gesetz)
U = R*I
mit
4.4
U:
R:
I:
elektrische Spannung [V]
ohmscher Widerstand [Ω]
elektrische Stromstärke [A]
Widerstand eines Leiters
Man kann den Widerstand eines Leiters aus dem spezifischen Widerstand des Materials und den
Abmessungen des Leiters bestimmen. Die Formel lautet
R=
mit
4.5
R:
ρ:
l:
ρ *l
A
Widerstand des Leiters [Ω]
spezifischer Materialwiderstand [Ω*mm2/m]
Länge des Leiters [m]
Kirchhoff’sche Gesetze
+
Was passiert, wenn man Widerstände in Serie oder parallel an eine
Spannungsquelle anschliesst?
Bei der Serienschaltung ist die Stromstärke I in allen Widerständen
R1, R2;... gleich gross! Die (Teil-) Spannungen an den einzelnen
Widerständen berechnen sich dann mit dem ohmschen Gesetz. Die
Summe aller Teilspannungen ergeben wieder die Spannung U an
der Serienschaltung der Widerstände. Damit ergibt sich für den
Gesamtwiderstand der Schaltung (Herleitung im Unterricht):
I
R1
U
R2
-
RG = R1 + R2 + ...
Bei der Parallelschaltung ist die Spannung an allen Widerständen
gleich gross! Die (Teil-) Ströme durch die einzelnen Widerstände
lassen sich nach dem ohmschen Gesetz berechnen. Die Summe
aller Teilströme ergeben wieder die Stromstärke, welche die
Spannungsquelle liefern muss. Somit kann der Gesamtwiderstand
der Schaltung wie folgt berechnet werden (Herleitung im Unterricht):
I
+
R1
U
-
1
1
1
=
+
+ ...
RG R1 R2
- 22 -
R2
Theorieblätter Physik Stefan Hellinge August 03
4.6
elektrische Leistung P
Fliesst durch einen Draht ein Strom, dann erwärmt sich der Draht (z.B. Glühlampe). Man kann sich das so
vorstellen, das die bewegten Elektronen an den Atomrümpfen durch Reibung Wärme erzeugen.
Geschwindigkeit mal (Reibungs-) Kraft ergibt Leistung. Man kann die Leistung einer Glühlampe oder eines
Föhns berechnen, wenn man Spannung und Stromstärke kennt:
P =U *I
mit
P:
U:
I:
elektrische Leistung [W]
elektrische Spannung [V]
Stromstärke [A]
- 23 -