Reflexe und Rhythmogenese - Neurobiologie, FU Berlin
Werbung

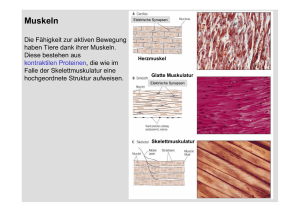
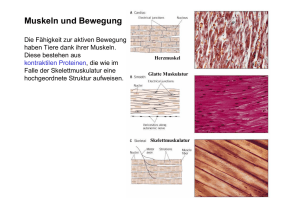
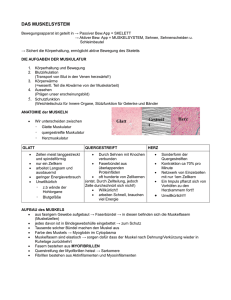
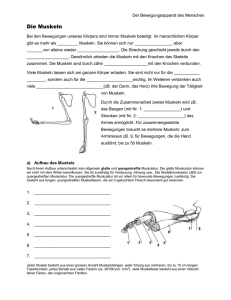
Muskeln Die Fähigkeit zur aktiven Bewegung haben Tiere dank ihrer Muskeln. Diese bestehen aus kontraktilen Proteinen, die wie im Falle der Skelettmuskulatur eine hochgeordnete Struktur aufweisen. Elektrische Synapsen Herzmuskel Glatte Muskulatur Elektrische Synapsen Skelettmuskulatur Typen von Muskeln * Quergestreifte Muskulatur Skelettmuskulatur („Willkürliche Muskulatur“, vielkernige Muskelfaser) Herzmuskulatur („unwillkürliche Muskulatur“, einkernige Muskelfaser durch elektrische Synapsen, gap junctions, verbunden) Querstreifung kommt von der regelmäßigen Anordnung der kontraktilen Proteine und von der Einteilung in Sarkomere. * Nicht quergestreifte Muskulatur Glatte Muskulatur („unwillkürliche Muskulatur“ der Eingeweide incl. Uterus, einkernige Muskelfasern durch elektrische Synapsen miteinander verbunden) Kontraktile Proteine. * Actinfilamente monomeres G-Actinmolekül, Durchmesser 5,5 nm, bilden Doppelhelix, F-Actin (Länge etwa 1mm, Dicke etwa 8 nm), an einem Ende an der Z-Scheibe angeheftet. In der Mitte der Actinhelix befindet sich alle 40 nm auf dem Actinfilament, Tropomyosin und Troponinkomplex * Actin Myosinfilamente monomeres Myosin, Länge 150 nm, Breite 2 nm, mit Schwanz. Hals und Kopf (Kopf: Länge 20 nm, Dicke 4 nm), LMM (light meromyosin): Schwanz, HMM (heavy meromyosin): Hals und Kopf, Myosinkopf mit ATPase-Aktivität Myosin 1 2 3 4 Tension (% of maximum) Spannung (% Maximum) Viskoelastisches Modell des Sarkomers Sarkomerlänge Elektromechanische Kopplung Muskelfibrille mit Filamenten Mitochondrium glattes ER (SR) Z-Streifen tubuläres System (T-Tubulus) Terminalzysterne des SR (ER) M-Streifen glattes ER (SR) Sarkolemm tubuläres System (T-Tubulus) Basalmembran Bindegewebsfasern Elektromechanische Kopplung: * Transmitter, freigesetzt an der neuromuskulären Synapse, bindet an entsprechende Rezeptormoleküle auf der postsynaptischen Muskelmembran. * Bildung eines EPSP (oder exzitatorisches EPP, Endplattenpotenzial), und Auslösung eines Muskel-Aktionspotenzials, welches sich vom Ort der neuromuskulären Synapse über die Muskelmembran bis in das T-System hinein ausbreitet. * Dort spannungsabhängige Aktivierung von Molekülen (Dihydropyridin-Rezeptoren), die in Kontakt zu den spannungsabhängigen Calcium-Kanälen (Ryanodin-Rezeptoren) des sarkoplasmatischen Retikulums (SR) stehen. * Freisetzung von Calcium-Ionen aus dem SR, welche nun am Tropomyosin-Troponin-Komplex auf dem Actinmolekül die Freigabe der Bindungsstelle für den Myosinkopf bewirken. * Acto-Myosinbindung und Beginn der Querbrückenzyklen Tension (% of maximum) Spannung (% Maximum) Viskoelastisches Modell des Sarkomers Sarkomerlänge Muskelmechanik Muskelmechanik Mechanisches Verhalten eines Muskels * serienelastische Elemente: Sehnen * parallel-elastische Elemente: Bindegewebshüllen, SR, Cytoplasma Ein Teil der von den kontraktilen Proteinen erzeugten Kraft muß in die Dehnung der nichtkontraktilen Elemente des Muskels (Sehnen, Bindegewebe) gesteckt werden und steht daher nicht zum Heben einer Last zur Verfügung! Zwei prinzipielle Kontraktionsarten: ISOTONISCH: solange die Kraft nicht ausreicht, die Last zu heben: Vergrößerung der Spannung, danach Verkürzung des Muskels und Beibehaltung der Spannung. ISOMETRISCH: Eine Verkürzung wird verhindert und dadurch zunehmende Spannung. Verhalten eines Muskels nach wiederholter Reizung Spannung unvollkommener Tetanus Zuckung glatter Tetanus Muskelkraft * Hängt von der Menge der parallel liegenden Sarkomere ab, d. h. von der Querschnittsfläche des Muskels (Muskeln, die große Kräfte ausüben müssen, sind meist kurz und dick!) * Säugermuskel: pro cm2 Durchmesser etwa 40 N (4 kp) * Wirbellose: pro cm2 Durchmesser etwa 30 N (3 kp) Muskelgeschwindigkeit * Hängt von der Anzahl der hintereinander geschalteten Sarkomere ab (langer Muskel besitzt höhere Kontraktionsgeschwindigkeit als ein kurzer) Für zwei Muskeln mit gleicher Masse und Querschnittsfläche gilt, daß der mit den längeren Sarkomeren die größere Kraftentwicklung aber kleinere Verkürzungsgeschwindigkeit besitzt, als der mit kürzeren Sarkomeren (kleinere Kraftentwicklung, aber höhere Verkürzungsgeschwindigkeit). Muskelwachstum (bei sportlichem Training): Anzahl der Myofibrillen pro Muskelfaser vergrößert sich. Muskelarbeit: Umwandlung chemischer Energie in mechanische Energie Wirkungsgrad: 30 bis 35%, das heisst 1/3 der Energie steht für Arbeit zur Verfügung, 2/3 erscheinen als Wärme. Oxidation von Kohlenhydraten (Glucose. Glykogen) und Aufbau von ATP * Muskel hat eigenen Vorrat an energiereichen Phosphatverbindungen (Kreatinphosphat) * Ein Teil der Prozesse kann anaerob ablaufen (Muskel geht „Sauerstoffschuld“) ein Dadurch kann ein Muskel jederzeit ein begrenztes Maß an Arbeit leisten! Stoffwechselwege im Muskel Leber Glykogen Glukose im Blut während Kontraktion Muskelgykogen Glukose im Muskel ohne O2 bei Ruhe Glykolyse ATP Kontraktion Lactat ins Blut Fettsäuren Aminosäuren ohne O2 Pyruvat mit O2 oxidative Phosphorylierung Krebszyklus oder Tricarbonsäurezyklus Atmungskette CO2 und H2O ins Blut während Kontraktion ATP bei Ruhe Kreatinphosphat Innervierung eines Muskels bei Wirbeltieren und Wirbellosen * Zahl der Motoneurone (motorische Einheiten) * Was bedeutet motorische Einheit? Alle Muskelfasern, welche von einem Motoneuron innerviert werden, gehören zu einer motorischen Einheit. Was bedeutet motorische Einheit? Alle Muskelfasern, welche von einem Motoneuron innerviert werden, gehören zu einer motorischen Einheit. Wirbellose Wirbeltiere slow fast Motoneurone (mehrere 100 bis tausend) „slow“ Muskelfaser inhibitorisch Muskelfaser Innervierung von Wirbeltiermuskeln Ein Wirbeltiermuskel besitzt sehr viele (bis zu mehreren tausenden motorische Einheiten). Innervierung von Muskeln Wirbeltiere (Vertebraten) * pro Muskelfaser nur ein Terminal (uniterminal, Endplatte, Muskelaktionspotenzial) (Ausnahme: spezielle langsame Muskelfasern der Haltemuskulatur) * pro Muskelfaser nur ein Motoneuron bei adulten Tieren (beim Embryo/Neugeborenen ist jede Muskelfaser von mehreren Motoneuronen innerviert, neuronaler Wettbewerb, das „aktivste Motoneuron gewinnt“ und dann gilt: „The winner takes all“.....) * pro Muskel viele (bis zu Tausend) motorische Einheiten * Neuromuskulärer Transmitter: Acetylcholin (nikotinische und muskarnische ACh-R) Wirbellose Tiere (Invertebraten) * pro Muskelfaser mehrere bis viele Terminale (multiterminal, keine Aktionspotenziale) * jede Muskelfaser kann von mehr als einem Motoneuron innerviert sein (polyneural) * wenige (spezialisierte) motorische Einheiten: fast (schnelle) Motoneurone, slow (langsame) Motoneurone, intermediate (intermediäre) Motoneurone, inhibitorische (Hemm-) Neurone (gilt für die quergestreiften Skelettmuskeln der Arthropoden, Mollusken besitzen quergestreifte und glatte Körpermuskulatur und viel mehr motorische Einheiten) * Neuromuskuläre Transmitter: erregend Glutamat, inhibitorisch GABA bei Arthropoden und Mollusken zusätzliche Neuromodulatoren Typen von Muskelfasern bei Wirbeltieren Rote Muskeln * reich an Myoglobin, z.B. Rumpfmuskulatur, Wadenmuskulatur (M. soleus) * langsame Muskeln, niedrige Myosin-ATPase-Aktivität * für Energie sparende, nicht ermüdende Leistungen (Dauer-, Halteleistungen) Weisse Muskeln * arm an Myoglobin, z.B. Gliedmaßenmuskulatur * schnelle Muskeln, hohe Myosin-ATPase-Aktivität * schnell ermüdend, nicht für kontinuierliche Muskelarbeit geeignet, da sie Energie vorwiegend anaerob gewinnen und dabei Lactat (Milchsäure) anhäufen. Reflex * Schnelle, stereotype, unwillkürliche Reaktion, die durch einen Reiz ausgelöst wird (Kniesehnenreflex, Lidschlagreflex, Schluckreflex, Schutzreflexe). * Viele Reflexe sind phasenabhängig, d.h. funktionieren nur innerhalb eines bestimmten Arbeitsbereichs. * Reflexe können unterdrückt werden, und das kann gelernt werden (Fakir, „lebende“ Puppen). * monosynaptische und polysynaptische Reflexe Haltereflex (Kontrolle der Muskellänge) γ Innervierung Muskelspindel sensorische Axone Ia Schutzreflex (Spannungsreflex, Kontrolle der Muskelspannung) Golgi Sehnenspindel Steuerung der Muskellänge über die Aktivierung des γ Motoneurons der Muskelspindel γ Beispiel für einen Reflex bei einem Insekt Schema der motorischen Kontrolle Kontrollzentren im Gehirn (motorischer Cortex, BasalGanglien, Cerebellum) sensorische Rückkopplung (sensory feedback) Zentrale Rhythmusgeneratoren im Rückenmark Motoneurone Muskeln Bewegung Sinneszellen Absteigende Bahnen zum Rückenmark, Pyramidenbahn, Extrapyramidale Bahn Die neuronale Kontrolle von Bewegungen * zielgerichtete Bewegungen erfordern Vorstellungen vom eigenen Körper und Raum („motorische Intelligenz“) * funktionelle Struktur neuronaler Bewegungskontrolle im gesamten Tierreich trotz unterschiedlicher Bewegungen gleichartig strukturiert * Konzept des Zentralen Mustergenerators (CPG, central pattern generator): Netzwerk von Neuronen, welche intrinsisch (ohne Anstoss von aussen) rhythmisch alternierende Aktivität erzeugen können. - Im Netzwerk kommt reziproke Hemmung vor - es gibt sogenannte Schrittmacherneurone * Zentrale Mustergeneratoren werden durch Neuromodulatoren (die aus anderen Teilen des ZNS kommen) oder durch Eingänge von Sinnesorganen angestossen oder moduliert. Rhythmische Motorische Aktivität A A 1s B B C C Stemmphase Rhythmische Bewegungsmuster * Bewegungen wie Laufen, Rennen, Fliegen, Schwimmen, Kaubewegungen, Atmung etc. werden durch neuronale Netzwerke im ZNS erzeugt und durch sensorische Rückkopplung den Umwelterfordernissen angepasst. * Der grundlegende alternierende Rhythmus wird dabei von einem Netzwerk von Neuronen im ZNS erzeugt (zentraler Mustergenerator, zentrales Programm, Oscillator) * Typischerweise werden nur der Beginn und das Ende der Bewegungsfolge bewusst kontrolliert, während der Ablauf mehr oder weniger automatisiert ist. ein kontinuierlicher Erregungseingang wird in einen rhythmischen Ausgang übersetzt (Brown Half Center Model) Alternierende Rhythmen sind oft das Ergebnis von Zentralen Rhythmusgeneratoren (CPG = Central Pattern Generator) im ZNS: Das lokomotorische Netzwerk im Rückenmark des Neunauges Motorische Aktivität im intakten Neunauge Motorische Aktivität im isolierten Rückenmark after Grillner and coworkers Nach Stevenson und Kutsch Entwicklung der motorischen Muster bei der Maus Nach Clarac, Pearlstein, Pflieger, Vinay 2003 Wie steuert unser Gehirn Bewegungen ? Verzeichnis der Windungen (Gyri) und Täler (Sulci) Zytoarchitektonische Kartierung nach Korbinian Brodman (1909) „Karten“ im Gehirn: Topographische Organisation Funktionen derHemisphäre Großhirnrinde, linke Hemisphäre Funktionen der linken Nach Karl Kleist, Nach 1920-1930 Karl Kleist, 1920-1930 „Phrenologie“ des 19. und 20. Jahrhunderts Motorischer Kortex Somatosensorischer Kortex Motorischer Kortex Motorische Funktionssysteme Wie steuert unser Gehirn Bewegungen ? * Willkür- und Zielbewegungen erfordern corticale Kontrolle primärer motorischer Cortex, supplementäres motorisches Areal, prämotorischer Cortex - Auswahl und Zahl der beteiligten Muskeln - ausgeübte Muskelkraft und zeitliche Modulation - Bewegungsverlauf (Zielrichtung, Geschwindigkeit der Bewegung, Gelenkstellung) * absteigende Bahnen von Corex zum Rückenmark - rubrospinaler Trakt (beginnt im N. ruber des Mittelhirns, der Eingänge vom Cortex und Kleinhirn erhält) - Pyramidenbahn (Zellkörper im primären motorischen Cortex, machen Verbindungen mit Interneuronen im RM welche Arm- und Beinbewegungen steuern) für feine Fingeraufgaben (greifen, anfassen, abtasten) * Basalganglien und Kleinhirn involviert in der „motorischen Programmgestaltung“, an der Erstellung der Zeitstruktur, an der „Feinkontrolle“ - Basalganglien wirken vorwiegend „dämpfend“ (und lassen nur die vom Cortex „ beabsichtigten“ Bewegungen ohne grösseren Hemmunge zu, damit Akzentuierung der gewollten Bewegungen (wirken stabilisierend auf gewollte Bewegungsabläufe) - Kleinhirn wirkt vorwiegend „erregend“ (motorisches Lernen, Feinkorrektur, zeitliche Strukturierung, beteiligt an kognitiven Lernprozessen) (Lernhypothese: macht zeitlich präzise strukturierte Handlungsprogramme) Neue Ideen zum motorischen Cortex: * Weitgehend überlappende Felder (Topographie nicht absolut) * Repräsentation von komplexen, im Verhalten bedeutungsvollen Haltungen (z.B. Hand oder Armstellung) * Bei Reizung einzelner Neurone: Hand führt komplexe Bewegungen aus, die alle zu einem Ziel am Körper geführt werden (z.B. Mund) * Reizung von Neuronen an verschiedenen Orten: Hand endet am gleichen Zielpunkt, aber mit unterschiedlicher Geschwindigkeit, andere Trajektorie usw. * Topographische Repräsentation der Lokalisationen der Hand im Raum um den Körper Nach: Graziano, Taylor, Moore and Cooke, Neuron 36: 349-362 (October 2002)