Vortrag: Entstehung und Evolution des terrestrischen und solaren
Werbung

Vortrag:
Entstehung und Evolution des
terrestrischen und solaren Magnetfeldes
gehalten von:
Daniel Köhn
Kiel, den 30. November 2004
INHALTSVERZEICHNIS
1
Inhaltsverzeichnis
1 Einleitung
2
2 Magnetfelder von Sonne und Erde
2
2.1
Magnetfeld der Sonne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2.2
Magnetfeld der Erde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3 Der Rikitake-Dynamo
3
3.1
Bewegungsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
3.2
Gleichgewichtsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
3.3
Ungleichgewichtsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
3.3.1
3.4
Umskalierung der Gleichungen auf
dimensionslose Variablen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
Diskussion der Numerischen Lösungen . . . . . . . . . . . . . . . . . . . . . . . . . .
5
4 Exkurs: Einführung in die Hydrodynamik
7
4.1
Massenerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
4.2
Impuls- und Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
4.3
Beispiel: Konvektion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
5 Strömungen in rotierenden Flüssigkeiten
9
6 Die MHD-Gleichungen
11
7 Dynamomodelle
11
7.1
7.2
Kinematische Modelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
7.1.1
Die magnetische Induktionsgleichung . . . . . . . . . . . . . . . . . . . . . . . 11
7.1.2
αω und α2 -Dynamo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Dynamische Modelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
8 Der Glatzmaier-Roberts-Dynamo
16
8.1
Das Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8.2
Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8.2.1
Die Feldstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
8.2.2
Magnetfeldumpolungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
8.2.3
Inhomogener Wärmefluß an der CMB . . . . . . . . . . . . . . . . . . . . . . 17
9 Der Solare Dynamo
17
10 Zusammenfassung und Ausblick
21
2
1 EINLEITUNG
1
Einleitung
Seit gut 200 Jahren wird das Magnetfeld der Erde systematisch untersucht. In dieser Zeit offenbarte es eine große Vielfalt von Variationen, welche sich auf einer Zeitskala von Stunden über Tagen,
Jahren bis hin zu Jahrmillionen erstrecken. Um den Ursprung dieser Dynamik zu erklären, muß
man die Prozesse im Inneren der Erde verstehen. Mit der Entdeckung des flüssigen äußeren Erdkerns zu Beginn des 20. Jahrhunderts hatte man eine plausible Quelle für das Magnetfeld der Erde
gefunden. In dieser Zeit wurde ein einfaches mechanisches Analogon entwickelt, um die Dynamik
des Erdkerns zu modellieren - der Scheibendynamo. Im ersten Teil soll eine Variante des Scheibendynamos vorgestellt und dessen Dynamik diskutiert werden.
Die modernen Dynamotheorien, welche nach dem Zweiten Weltkrieg entwickelt wurden, beruhen
auf einer allgemeinen Beschreibung der Strömungen im äußeren Erdkern, die durch das Zusammenspiel von Wärmetransport, Erdrotation und Magnetfelder entstehen. Die nötigen theoretischen
Grundlagen sollen im zweiten Teil vermittelt werden.
Im dritten Teil schließt sich eine Diskussion der modernen Dynamomodelle an, die durch die Entwicklung leistungsfähiger Computer und numerischer Methoden in den 70er Jahren des letzten
Jahrhunderts vorangetrieben wurden. Dies gipfelte im Jahr 1994 in einem numerischen Modell,
welches erstmals in der Lage war die Dynamik des Erdmagnetfeldes über einen großen Zeitraum
zu beschreiben - der Glatzmaier-Roberts-Dynamo.
2
2.1
Magnetfelder von Sonne und Erde
Magnetfeld der Sonne
Das Magnetfeld B in der Sonne ist nicht direkt meßbar, auf der Sonnenoberfläche ist B sehr unregelmäßig verteilt. Während eines Sonnenfleckenmaximums beträgt B ≈ 0.1 T im Bereich von Sonnenflecken. Auf der übrigen Sonnenoberfläche liegt das Magnetfeld bei B ≤ 10−4 T . Die Häufigkeit
der Sonnenflecken variiert zyklisch mit einer Periode von etwa 11 Jahren. Nach jedem Sonnenfleckenzyklus kehrt sich die Polarität des Feldes um. So entsteht ein 22-jähriger Zyklus (auch HaleZyklus genannt). Sonnenflecken sind entlang von zwei Gürteln, entlang des Äquators verteilt, die
Abbildung 1: Jährliche Sonnenfleckenzahl R (aus [13]).
während eines Sonnenfleckenzyklus zuerst breiter und dann schmaler werden, wobei die mittlere
Breite der Flecken sich zum Äquator bewegt (Schmetterlingsdiagramm) (Abbildung 2). Neben
der gewöhnlichen Variabilität war die magnetische Aktivität zum Teil sehr viel geringer, z.B. das
Maunderminimum (≈ 1645 − 1715). Aus 14 C−Untersuchungen geht hervor, daß sich die Sonne vielleicht 20 - 30% ihrer bisherigen Lebenszeit in einer solchen Phase (typische Dauer 100-300 Jahre)
befunden hat ([14]).
3
3 DER RIKITAKE-DYNAMO
Abbildung 2: Schmetterlingsdiagramm (aus [13]).
2.2
Magnetfeld der Erde
Eine Zerlegung des Magnetfeldes auf der Erdoberfläche (wie ein Potentialfeld, d.h. definiert durch
~ × B/µ
~ 0 = 0, B
~ = −∇ψ),
~
J~ = ∇
ψ =R
∞ X
l ·µ ¶−l−1
X
r
+
l=1 m=0
µ ¶l
r
R
R
sin mφ}
{glm,int cos mφ + hm,int
l
¸
(1)
sin mφ} Plm (cos θ),
{glm,ext cos mφ + hm,ext
l
wobei R=6370 km den Erdradius bezeichnet, erlaubte zuerst Gauss (1838) festzustellen, daß das
Magnetfeld innerhalb der Erde erzeugt wird (|glm,int |, |hm,int
| >> |glm,ext |, |hm,ext
|). Das Magnetfeld
l
l
−5
an der Oberfläche wird dominiert vom Dipolanteil (l=1): B1 (R) ≈ 3 · 10 T und BRest≈0.25 B1 .
Der Betrag des Dipolmomentes der Erde ist von der Größenordnung m ≈ 8 · 1022 Am2 . Der Winkel zwischen Dipolachse und Rotationsachse beträgt θ ≈ 11◦ . Nichtperiodische Umpolungen der
Erdmagnetfeldes (mittleres Intervall zwischen zwei Umpolungen ca. 5 · 10 5 Jahre) innerhalb kurzer
~ Rest bewegt sich mit 0.18◦ /Jahr westwärts relativ zum
Zeit (103 − 104 Jahre). Das Nicht-Dipolfeld B
Dipolfeld.
Die Erde besteht aus einem leitenden metallischen Kern (Radius 3500 km) und einem nichtleitendem Mantel (Mächtigkeit 2900 km). Der Kern besteht aus einem festen inneren Kern (Radius
1400 km) und einem flüssigen äußeren Kern (Mächtigkeit 2100 km).
3
Der Rikitake-Dynamo
Im Jahr 1909 schlug der englische Physiker Joseph Larmor ein mechanisches Analogon zum äußeren
Erdkern vor. Die Grundidee dabei ist, daß die mechanische Energie der Strömungen in einer
Flüssigkeit in magnetische Energie umgewandelt wird. Dieser Vorgang wird als Dynamoeffekt
bezeichnet. Larmor erkannte, daß bei einem Scheibendynamo, ebenfalls mechanische in magnetische Energie umgewandelt wird. 50 Jahre später koppelte T. Rikitake [1] zwei Scheibendynamos und
konnte auf diese Weise auch Umpolungen des Magnetfeldes erzeugen. Im folgenden soll Rikitakes
Experiment nachvollzogen werden.
3.1
Bewegungsgleichungen
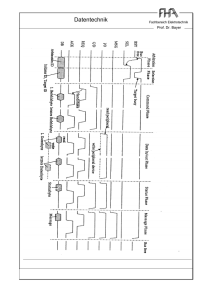
Abbildung 3 zeigt das zu lösende Problem der zwei gekoppelten Scheibendynamos. Die Bewegungsgleichungen lassen sich am einfachsten in zwei Schritten herleiten. Zunächst betrachten wir die
Gleichungen im Kräftegleichgewicht und verallgemeinern diese anschließend auf den Ungleichgewichtsfall.
4
3 DER RIKITAKE-DYNAMO
Abbildung 3: Skizze des Rikitake-Dynamos (aus [2]).
3.2
Gleichgewichtsgleichungen
Ein Strom I1 fließt im Uhrzeigersinn durch die untere Leiterschlaufe . Dieser Kreisstrom erzeugt
ein Magnetfeld B2 , welches nach unten zeigt. Dieses Magnetfeld durchdringt nun die rotierende,
elektrisch leitende Scheibe auf der rechten Seite. Durch das aufgewandte Drehmoment G dreht sich
die Scheibe gegen den Uhrzeigersinn mit der Winkelgeschwindigkeit Ω2 . Das induzierte elektrische
~ i = ~u × B
~ zeigt nach innen auf das Zentrum der Scheibe. Dies ist der Antrieb für den Strom
Feld E
I2 . Im Gleichgewichtsfall würde in dem Stromkreis gelten:
RI2 = M Ω2 I1
(2)
Hierbei ist R der elektrische Widerstand in dem Stromkreis und M die Magnetisierung der elektrisch
~ erzeugt eine Kraft F~ = I~ × B.
~
leitenden Scheibe. Ein elektrischer Strom I~ in einem Magnetfeld B
~
Die Wechselwirkung zwischen dem Magnetfeld B2 mit dem radial nach innen gerichteten Strom I~2
erzeugt ein Drehmoment im Uhrzeigersinn. Für den Gleichgewichtsfall schreiben wir:
G = M I 1 I2
(3)
Die oben aufgestellten Gleichungen gelten genauso für den linken Scheibendynamo.
3.3
Ungleichgewichtsgleichungen
Im Ungleichgewichtsfall sind I und Ω nicht konstant. Dadurch wird Gleichung (1) um einen Induktionsterm und Gleichung (2) um einen Drehmomentterm erweitert. Für die beiden Scheibendynamos
folgt damit ein System von 4 gekoppelten, gewöhnlichen Differentialgleichungen:
L
dI1
+ RI1 = M Ω1 I2
dt
(4)
5
3 DER RIKITAKE-DYNAMO
dI2
+ RI2 = M Ω2 I1
dt
dΩ1
= G − M I 1 I2
C
dt
dΩ2
= G − M I 1 I2
C
dt
L
(5)
(6)
(7)
Hierbei ist L der Selbstinduktionskoeffizient in dem jeweiligen Stromkreis und C das Trägheitsmoment
der Dynamos. Subtrahieren wir Gleichung (6) von (5) und integrieren die resultierende Gleichung,
so folgt:
Ω1 − Ω 2 = Ω 0
(8)
wobei Ω0 eine Konstante ist.
3.3.1
Umskalierung der Gleichungen auf
dimensionslose Variablen
Wir haben nun 5 Konstanten in den Gleichungen (C,L,R,M,G). Durch Einführung von dimensionslosen Variablen und Parametern können wir die Zahl der Konstanten auf 2 reduzieren! Wir
substituieren die dimensionslosen Variablen:
µ ¶1
¶1
M 2
M 2
τ =
t, A1 =
I1 , A 2 =
I2
G
G
µ
¶1
¶1
µ
CM 2
CM 2
B1 =
Ω 1 , B2 =
Ω2
GL
GL
¶1
¶1
µ
µ
CR2 2
CM 2
Ω0 , ψ =
K =
GL
GLM
µ
GM
LC
¶1
2
µ
K = ψ(Q2 − Q−2 )
in die Gleichungen (3)-(5) und (7):
dA1
+ ψA1 = B1 A2
dτ
dA2
+ ψA2 = A1 (B1 − K)
dτ
dB1
= 1 − A 1 A2
dτ
B2 = B 1 − K
(9)
(10)
(11)
(12)
Dieses System von gewöhnlichen Differentialgleichungen kann nun numerisch gelöst werden.
3.4
Diskussion der Numerischen Lösungen
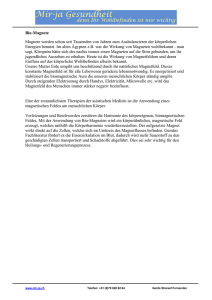
Abbildung (3) zeigt die zeitliche Entwicklung des dimensionslosen Stroms A1 des Gleichungssystems
(8)-(11) gerechnet für die Parameter K = 2, ψ = 1 (oben) und K = 2, ψ = 1.000001. Die Differenz
der beiden Lösungen (unten) offenbart den chaotischen Charakter der Magnetfeldumpolung: Die
Lösungen sind sehr sensitiv gegenüber den Anfangsbedingungen und unterscheiden sich bereits ab
t = 75 signifikant voneinander.
Analog zum Erdmagnetfeld existieren Phasen in denen das Magnetfeld sich nicht umpolt. Die
Intensität des Feldes ist in diesen Zeiten jedoch keineswegs konstant sondern mitunter starken
Schwankungen unterworfen. Die Umpolung von normalen zum inversen Feld erfolgt jedoch stets
sprunghaft in relativ kurzen Zeiten.
Doch stellt sich die Frage, ob es nicht auch periodische Lösungen gibt. Abb. 2 zeigt, daß in der
K − ψ − Ebene durchaus periodische Lösungen existieren. Gilt dies auch für das Magnetfeld der
Erde ?
6
3 DER RIKITAKE-DYNAMO
Lösung der "Rikitake−Gleichungen"
5
4
3
1
1
Strom A [ ]
2
0
−1
−2
−3
−4
−5
0
50
100
Zeit τ [ ]
150
200
Lösung der "Rikitake−Gleichungen"
5
4
3
1
1
Strom A [ ]
2
0
−1
−2
−3
−4
−5
0
50
100
Zeit τ [ ]
150
200
Differenz der Lösungen der "Rikitake−Gleichungen"
8
6
2
1
Strom A [ ]
4
0
−2
−4
−6
−8
0
50
100
Zeit τ [ ]
150
200
Abbildung 4: Zeitliche Entwicklung des dimensionslosen Stroms A1 , oben: für K = 2 und ψ = 1,
Mitte: für K = 2 und ψ = 1.000001, unten: Differenz der Lösungen
4 EXKURS: EINFÜHRUNG IN DIE HYDRODYNAMIK
4
7
Exkurs: Einführung in die Hydrodynamik
Das Verständnis der Geodynamomodelle setzt einige Grundlagen der Hydrodynamik vorraus. Diese
sollen in dem folgenden Exkurs zusammengefaßt werden. Eine leicht verständliche Einführung liefert
das Buch von E.Guyon et al.[3]. Eine etwas theoretischere Einführung liefern Landau und Lifschitz
[4]. Als Standardwerke der Hydrodynamik sind die Bücher von Batchelor und Tritton zu nennen
[5],[6]. Grundlage der Hydrodynamik bilden die Erhaltungssätze für Masse, Impuls und Energie.
Die Grundidee soll dabei anhand der Massenerhaltung im Detail erläutert werden:
4.1
Massenerhaltung
Wir betrachten einen Würfel mit der Oberfläche F und dem Volumen V. Der Würfel sei mit einer
Flüssigkeit der Dichte ρ gefüllt. Die Gesamtmasse
M in dem Würfel erhalten wir durch Integration
R
der Massendichte über das Volumen: M = V ρdV . Diese Masse können wir nun ändern, indem
wir einen Teil der Flüssigkeit über die Oberfläche abfließen lassen. Auf atomarer Ebene heißt dies,
daß pro Zeiteinheit und Fläche eine bestimmte Anzahl von Teilchen durch die Oberfläche strömt“.
”
Diese Größe wird als Massenstromdichte ~j = ρ~v bezeichnet. Werden nun sämtliche Stromdichten
aller Oberflächenelemente aufintegriert, so entspricht dies der zeitlichen Änderung der Gesamtmasse
in dem Würfel, also:
Z
Z
∂ρ
ρ~v · dF = 0
(13)
dV +
F
V ∂t
Diese Bilanz hängt allerdings noch von der Größe des Volumens und der Oberfläche ab. Unter Ausnutzung des Gaußschen Satzes kann das Oberflächenintegral in ein Volumenintegral umgewandelt
werden. Damit folgt:
Z
∂ρ
+ ∇ · ρ~v dV = 0
(14)
V ∂t
Soll das Integral nun unabhängig von dem Volumen sein, so muß der Integrand verschwinden, also:
∂ρ
+ ∇ · ρ~v = 0
∂t
(15)
Ausdifferenzieren des zweiten Terms liefert:
∂ρ
+ ~v · ∇ρ + ρ∇ · ~v = 0
∂t
(16)
Die ersten beiden Terme werden in der Hydrodynamik häufig als substantielle Ableitung bezeichnet.
Diese bedeutet einfach, daß ein Beobachter, welcher sich mit der Flüssigkeit bewegt zum einen
zeitliche Dichtevariationen mißt, sich andererseits aber mit der Strömung bewegt und damit auch
örtliche Variationen mißt.
4.2
Impuls- und Energieerhaltung
Analog zur Massenerhaltung können nun die Impuls- und Energieerhaltung formuliert werden. Dabei ist der grundsätzliche Aufbau der Gleichungen immer identisch. Die betrachtete Größe läßt sich
mit Hilfe eines entsprechenden Stromes über die Oberfläche verändern. Gegenüber der Massenerhaltung können nun auch Quellterme auftreten. Bei der Impulserhaltung sind dies Kräfte F~ , bei der
Energieerhaltung Wärmequellen Q, z.B. bedingt durch radioaktiven Zerfall. Analog zu Abschnitt
4.1 folgt somit:
µ
¶
∂~v
ρ
+ ~v · ∇~v = ∇ · ~~σ + F~
∂t
¶
µ
∂T
+ ~v · ∇T = ∇ · ~q + Q
ρ Cp
∂t
Hierbei ist ~~σ der Spannungstensor, Cp die spezifische Wärmekapazität, T die Temperatur und ~q
der Wärmefluß. Für die Divergenz des Spannungstensors und des Wärmeflußes läßt sich schreiben
4 EXKURS: EINFÜHRUNG IN DIE HYDRODYNAMIK
8
(siehe Kap. 1,3 und 4 in [3]):
∇ · ~~σ = −∇P + η∇2~v + η∇(∇ · ~v )
∇ · ~q = −k ∇T
Wobei P der Druck, η die dynamische Viskosität und k die thermische Leitfähigkeit sind. Damit
folgt:
µ
¶
∂~v
ρ
+ ~v · ∇~v
= −∇P + η∇2~v + η∇(∇ · ~v ) + F~
(17)
∂t
µ
¶
∂T
+ ~v · ∇T
= k ∇2 T + Q
(18)
ρ Cp
∂t
Die Gleichungen (15), (16) und (17) bilden ein System von drei gekoppelten, nichtlinearen partiellen
Differentialgleichungen. Es treten jedoch vier Unbekannte auf (P, T, ρ, ~v ). Um die Gleichungen lösen
zu können wird noch eine vierte Gleichung benötigt, welche einen Zusammenhang zwischen den
unbekannten Größen herstellt. Dies gewährleistet die Zustandsgleichung: ρ(T, P ).
4.3
Beispiel: Konvektion
Mit den Gleichungen (15), (16) und (17) sind wir nun in der Lage Strömungen in Flüssigkeiten zu
beschreiben. Als Beispiel wollen wir einen wichtigen Aspekt bei der Entstehung des Magnetfeldes
im äußeren Erdkern modellieren - die Konvektion. Hierbei machen wir folgende Annahmen:
1. Ein in y-Richtung unendlich ausgedehnter Kasten der Höhe d ist mit einer Flüssigkeit gefüllt.
2. Der Kasten wird von unten geheizt und von oben gekühlt, so daß sich eine Temperaturdifferenz
∆T ? ausbildet.
3. Die betrachtete Flüssigkeit ist inkompressibel
∂ρ
∂t
= 0 → ∇ · ~v = 0.
4. Die einzige auftretende Kraft ist die Gravitation (F~ = ρ~g = ρg e~z ).
5. Die Flüssigkeit dehnt sich bei Erwärmung aus und zieht sich bei Abkühlung zusammen
(ρ(T ) = ρ0 (1 − α(T − T0 ))).
6. Die Dichtevariationen sind klein und dominieren nur bei der Gravitationskraft (Boussinesq
Approximation).
7. Es befinden sich keine Wärmequellen in der Flüssigkeit (Q = 0).
8. Nichtlineare Terme werden vernachlässigt.
Mit den oben gemachten Annahmen vereinfachen sich die Gleichungen (15), (16) und (17) zu:
∇ · ~v = 0
∂~v
ρ
= −∇P + η∇2~v + ρ~g
∂t
∂T
+ ~v · ∇T
∂t
= κ ∇2 T
(19)
(20)
(21)
Dieses Gleichungssystem kann nun numerisch gelöst werden. Als Maß für die Stärke der Konvektion
? )d3
dient die Rayleighzahl RB = gα(∆T
. Bei einer Rayleighzahl größer als 1000 setzt laminare Konκµ
vektion ein. In der hier dargestellten numerischen Rechnung (Abb. 4)wurde für eine Rayleighzahl
von 8000 das Temperatur- und Geschwindigkeitsfeld aus den Gleichungen (24) und (26) ermittelt.
Zum Zeitpunkt t = 0 nimmt die Temperatur linear mit der Tiefe zu. Eine kleine Störung des
Systems wächst schnell an und bildet schließlich ein regelmäßiges Muster von Konvektionsrollen
aus.
9
5 STRÖMUNGEN IN ROTIERENDEN FLÜSSIGKEITEN
5
Strömungen in rotierenden Flüssigkeiten
In rotierenden Flüssigkeiten treten, bedingt durch die Transformation auf ein rotierendes Bezugssystem, zwei zusätzliche Terme in der Navier-Stokes-Gleichung auf, die Coriolis- und die Zentrifugalkraft:
∂~v
2
~ × ~v )
~ × (Ω
~ × ~r)) + 2(Ω
ρ
+ ~v · ∇~v + (Ω
= −∇P + η∇ ~v + η∇(∇ · ~v ) + F~
{z
}
| {z }
|
∂t
Zentrif ugalbeschl.
Coriolisbeschl.
~ die Winkelgeschwindigkeit und ~r der Abstand von der Rotationsachse. In den Abb.
Hierbei ist Ω
5 und Abb. 6 sind analytische Lösungen aus dem Buch von Chandrasekhar [7] dargestellt. In
Abb. 5 wurde die Rotation vernachlässigt. Bedingt durch die Konvektion steigt ein Bereich in
der Flüssigkeit auf, kühlt sich an der Oberfläche ab und sinkt anschließend wieder nach unten In
Abb. 6 ist der Effekt der Rotation auf die Konvektionsströmung erkennbar. Ein Flüssigkeitselement
steigt in einer helixförmigen Bahn nach oben, wobei es sich entgegen dem Uhrzeigersinn dreht. Am
Äquator kehrt sich die Drehrichtung um. An der Oberfläche kühlt sich das Fluidelement ab und
sinkt in einer zweiten Säule wieder nach unten.
Taylor−Säulen
−0.2
z [m]
−0.4
−0.6
−0.8
0
1
−2
0
−4
y [m]
−1
−6
−2
x [m]
Abbildung 5: Konvektion mit Rotation.
10
5 STRÖMUNGEN IN ROTIERENDEN FLÜSSIGKEITEN
40
30
20
10
0
0
25
50
75
100
125
150
0
25
50
75
100
125
150
0
25
50
75
100
125
150
0
25
50
75
100
125
150
40
30
20
10
0
40
30
20
10
0
40
30
20
10
0
Abbildung 6: Zeitliche Entwicklung des Temperaturfeldes bei einer Rayleigh-Zahl von 8000.
11
6 DIE MHD-GLEICHUNGEN
6
Die MHD-Gleichungen
Der äußere Erdkern besteht aus einer Flüssigkeit mit freien Ladungsträgern. Bedingt durch die
mechanischen Strömungen entstehen so elektrische Ströme, welche wiederum magnetische Felder
induzieren. Die Einbindung von elektromagnetischen Feldern führt von den Hydrodynamik- zu den
Magneto-Hydrodynamik-Gleichungen (MHD-Gleichungen):
ρ
„
~
~j + ∂ D
∂t
~
∂B
−
∂t
0
~
∇×H
=
~
∇×E
=
~
∇·B
~
∇·D
=
=
ρe
(25)
~j
«
=
~ + σ(~v × B)
~
σE
(26)
=
~ + ρ~g
−∇P + η∇2~v + η∇(∇ · ~v ) + ~j × B
(27)
=
k ∇2 T + Q
(28)
=
0
(29)
∂~v
~ × ~v )
+ ~v · ∇~v + 2(Ω
∂t
«
„
∂T
+ ~v · ∇T
ρCp
∂t
∂ρ
+ ~v ∇ρ + ρ∇ · ~v
∂t
ρ(T, P, H)
(22)
(23)
(24)
(30)
~ die magnetische Feldstärke, ~j die elektrische Stromdichte, D
~ die elektrische VerschieHierbei ist H
~ das elektrische Feld, B
~ die magnetische Flußdichte, ρe die Ladungsdichte und
bungsstromdichte, E
σ die elektrische Leitfähigkeit. Der elektromagnetische Anteil wird beschrieben durch die MaxwellGleichung ((27)-(30)). Dazu kommt eine Zustandsgleichung“ für elektrische und magnetische Fel”
der in Form des Ohmschen Gesetzes (31). Die Gleichungen (32) bis (35) bilden den mechanischen
Teil und sind bereits aus Abschnitt 2 bekannt. Die Verknüpfung zwischen mechanischem und elek~ in der Navier-Stokes-Gleichung
tromagnetischem Anteil entsteht durch die Lorentzkraft (~j × B)
(32). Mit den MHD-Gleichungen besitzen wir nun alle nötigen Grundlagen, um die unterschiedlichen Geodynamomodelle zu verstehen.
7
Dynamomodelle
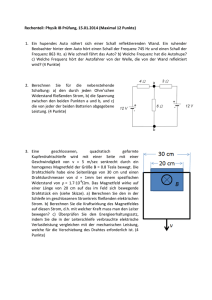
Das gleichzeitige Lösen der Gleichungen (27) bis (35) wird als Dynamo-Problem bezeichnet. Aufgrund der Komplexität des Problems hat man versucht Teile des Gleichungssystems zu vereinfachen, bzw. zu approximieren. Aus diesen Versuchen resultierte eine große Vielfalt unterschiedlicher Dynamotheorien, welche in dem Diagramm auf Seite 19 exemplarisch zusammengestellt sind.
Grob können die Dynamotheorien in zwei Klassen eingeteilt werden, die kinematischen und die
dynamischen Theorien.
7.1
Kinematische Modelle
Bei kinematischen Modellen wird ein plausibles Strömungsfeld im äußeren Erdkern angenommen,
dieses in den elektromagnetischen Anteil der MHD-Gleichungen eingesetzt und daraus das resultierende Magnetfeld berechnet. Die Ursachen dieses Strömungsfeldes, welche durch die Navier-StokesGleichung (32) beschrieben wird, bleiben dabei unbeachtet.
7.1.1
Die magnetische Induktionsgleichung
Der elektromagnetische Anteil läßt sich noch etwas vereinfachen. Dazu nehmen wir zunächst einmal
an, daß sich die Elektronen und Ionen im äußeren Erdkern unabhängig voneinander bewegen, so
~ konstant
daß keine Ladungstrennung stattfindet. In diesem Fall ist die Verschiebungsstromdichte D
∂D
und damit gilt ∂t = 0. Einsetzten von (31) in (27) ergibt:
~ = σE
~ + σ(~v × B)
~
∇×H
(31)
12
7 DYNAMOMODELLE
~ = µ0 H
~ so ergibt sich:
Bilden wir die Rotation, berücksichtigen (29), (28) und die Beziehung B
~
∂H
1
~ + ∇ × (~v × H)
~
=
∇2 H
∂t
σµ0
(32)
Diese Gleichung wird als Magnetische Induktionsgleichung bezeichnet. Im folgenden betrachten wir zwei Extremfälle der Magnetischen Induktionsgleichung.
1. σ → ∞
Betrachten wir große Leitfähigkeiten σ → ∞, so reduziert sich die magnetische Induktionsgleichung auf
~
∂H
~ × (~v × H)
~
=∇
(33)
∂t
Wie wir im folgenden herleiten, bedeutet diese Gleichung, dass der magnetische Fluss durch
eine im Plasma mitgeführte geschlossene Kurve konstant bleibt (Abbildung 7). Der durch die
u
dl
dS
H
S
C
Abbildung 7: Magnetischer Fluss durch die durch die geschlossene Kurve C aufgespannte Fläche S.
Fläche S durchtretende magnetische Fluss kann sich in zwei Weisen ändern, einerseits kann
~ zeitlich ändern, oder die Kurve C
sich das in einer festen Kurve C eingeschlossene Feld H
~
bewegt sich relativ zum Feld H. Im ersten Fall ist die Änderung des Flusses in einem kleinen
~ gegeben durch
Flächenelement dS
~ · dS
~
Ḃ
(34)
und die totale Änderung ergibt sich durch Integration über die gesamte Fläche S. Im zweiten
~ Die Änderung des
Fall bewegt sich ein infinitesimales Element der Kurve d~l relativ zu H.
eingeschlossenen Feldes ist dann
~ · (~u × d~l)
H
(35)
und die gesamte Änderung ergibt sich durch Konturintegration entlang C. Unter Beachtung
~ · (B
~ × C)
~ = (A
~ × B)
~ ·C
~ schreiben wir die gesamte Änderung des Flusses
der Vektoridentität A
durch die durch die Kurve C aufgespannte Fläche S:
d
dt
Z
~ · dS
~=
H
S
Z
S
~
∂H
~−
· dS
∂t
I
~ · d~l.
(~v × H)
(36)
C
Das Konturintegral wird mit dem Satz von Stokes in ein Flächenintegral umgewandelt
I
Z
~
~
~ × (~v × H)
~ dA.
~
(~v × H) · dl =
∇
(37)
C
S
13
7 DYNAMOMODELLE
Im Integranden steht nun genau die rechte Seite der Induktionsgleichung für den Fall unendlich guter Leitfähigkeit des Plasmas, was bedeutet, daß
d
dt
Z
~ · dS
~=
B
S
¶
Z µ ~
∂H
~
~
= ∇ × (~v × H) = 0,
∂t
S
(38)
womit die oben aufgestellte Behauptung, daß sich der Fluß durch die Kurve C nicht verändert,
bewiesen ist. Physikalisch bedeutet dies, daß sich das Magnetfeld mit dem Plasma bewegt
(”eingefrorene” Feldlinien).
2. ṽ = 0
Im zweiten Extremfall ist die Geschwindigkeit ~v = 0. Damit reduziert sich die Induktionsgleichung auf:
~
∂H
1
~
=
∇2 H
(39)
∂t
σµ0
~ Betrachten wir das in
Mathematisch ist dies eine Diffusionsgleichung für das Magnetfeld H.
Nichtleiter
z=d
z
Leiter
H
z=0
x
Nichtleiter
Abbildung 8: Einfaches Beispiel zur Erläuterung des Zerfalls eines Magnetfeldes
Abbildung 8 dargestellte einfache Problem mit folgenden Anfangs- und Randbedingungen:
~ = 0) = H
~0 = (H(z, 0), 0, 0)T
H(t
H(z = 0) = H(z = d) = 0
(40)
Dieses Problem besitzt folgende Lösung:
¶
nπz
Hn (t)sin
, mit
H(z, t) =
d
n=1
·
µ ¶2 ¸
nπ
1
Hn (t) = Hn (0)exp −
σµ0 d
∞
X
µ
(41)
Dieses Problem besitzt eine zeitlich exponentiell abnehmenden Lösung, d.h. eine solches Magnetfeld ist nicht stabil, sondern zerfällt auf einer Zeitskala τ = ( πd )2 σµ0 , weshalb man diesen
Dynamotyp als Free-Decay-Dynamo“ bezeichnet.
”
Aus den beiden Extremfällen der magnetischen Induktionsgleichung können wir ein notwendiges
Kriterium für die Existenz eines Dynamos ableiten: Das Verhältnis von Diffusionszeit τd zu Advektionszeit τv (Magnetische Reynoldszahl)muß größer als 1 sein.
Rm =
uB/L
= uLσµ0 ≥ 1.
B/σµ0 L2
(42)
Andernfalls würde das Magnetfeld auf der Diffusionszeitskala τd zerfallen. In Tabelle 1 ist die
magnetische Reynoldszahl zusammen mit der Diffusionszeit für einige Objekte zusammengestellt.
14
7 DYNAMOMODELLE
Objekt
L [m]
v [ms−1 ]
σ[Ω−1 m−1 ]
τd
Rm
Hg(l)
1
1
1 · 106
1.2 s
1.2
Erdkern
3.5 · 106
10−4
3 · 105
105 a
100
Sonne (Konv.-Schicht)
2 · 108
10
3 · 106
4 · 109 a
7 · 109
Tabelle 1: Typische Längenskala L, Geschwindigkeiten v, elektrische Leitfähigkeiten σ, Diffusionszeiten τd und Magnetische Reynoldszahlen Rm für flüssiges Quecksilber (Laborexperimente auf der
Erde), die Erde und die Sonne.
7.1.2
αω und α2 -Dynamo
In dem vorherigen Abschnitt konnte wir sehen, unter welchen Umständen ein Magnetfeld zerfällt. Im
diesem Abschnitt soll analysiert werden, wie ein Magnetfeld verstärkt werden kann. Betrachten wir
eine poloidale Magnetfeldlinie in einer Plasmakugel mit sehr hoher elektrischer Leitfähigkeit. Das
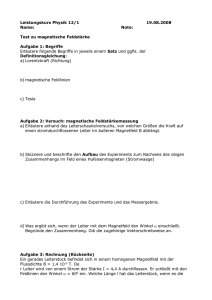
Plasma in der Kugel fließt in einem toroidalen Strömungsfeld (Abbildung 9, oben links). Durch die
hohe Leitfähigkeit ist das Magnetfeld in dem Plasma ”eingefroren”. Entsprechend wird die poloidale
Feldlinie deformiert (Abbildung 9, oben rechts) und bildet schließlich ein toroidales Magnetfeld
(Abbildung 9, mitte links). Die Erzeugung dieses toroidalen Magnetfeldes aus einem poloidalen
Magnetfeld wird als ω-Effekt bezeichnet. Lokale Konvektionsbewegungen führen zusammen mit
der Corioliskraft zu einer Verdrillung der toroidalen Magnetfeldlinie (Abbildung 9, mitte rechts).
Durch diese Magnetfeldschlaufe entsteht ein Strom J2 , welcher (anti-)parallel zum ursprünglichen
Magnetfeld B0 ist
J2 = αB0 .
(43)
Dieser Effekt wird als α-Effekt bezeichnet (Abbildung 9, unten links). Der Strom wiederum erzeugt
ein Magnetfeld, welcher das ursprüngliche poloidale Feld verstärkt (Abbildung 9, unten rechts). Das
toroidale Magnetfeld läßt sich statt durch den ω-Effekt auch durch den α-Effekt erzeugen. In diesem
Fall spricht man von einem α2 -Dynamo. Spielen sowohl der α-, als auch der ω-Effekt eine Rolle bei
der Erzeugung des toroidalen Magnetfeldes, so spricht man von einem α 2 ω-Dynamo.
7.2
Dynamische Modelle
Bei den dynamischen Modellen wird die Navier-Stokes-Gleichung in die Rechnung eingebunden.
Damit sind die Gleichungen allerdings nur noch numerisch lösbar. Da in den 70er Jahren des
letzten Jahrhunderts die Computerkapazität noch sehr gering war, konnte nicht die komplette
Navier-Stokes-Gleichung gelöst werden. Meist beschränkte man sich darauf die Lorentzkraft nur
als Störterm zu berücksichtigen ( Weak-Field-Näherung“). Der Physiker Friedrich Busse ging
”
sogar noch einen Schritt weiter und betrachtete auch die Gravitation nur als Störung. In diesem
Fall balanciert der Druckgradient die Corioliskarft (geostrophisches Gleichgewicht):
1
~ × ~v
− ∇P = 2Ω
ρ
(44)
Eine Analyse dieser Annahme zeigte, daß die Geschwindigkeit in z-Richtung konstant ist. Dies
konnte Busse ausnutzen, um das dreidimensionale numerische Modell auf ein zweidimensionales zu
reduzieren, welches selbst mit den Computern der 70er Jahre berechnbar war. Aus diesen Rechnungen ergaben sich säulenförmige Strukturen, parallel zur z-Achse, welche im Laufe der Zeit um
die Rotationsachse drifteten. Dies war die erste Berechnung der Secular Variation mit einem hydromagnetischen Modell. Eine korrekte Berechnung mit einem starken Magnetfeld ( Strong-Field“)
”
sollte jedoch erst 20 Jahre später erfolgen.
15
7 DYNAMOMODELLE
Poloidales
Geschwindigkeitfeld
Poloidales
Geschwindigkeitfeld
Poloidale Magnetfeldlinie
Poloidale Magnetfeldlinie
Toroidales
Magnetfeld
Konvektion
Coriolis−Kraft
Poloidale Magnetfeldlinie
Konvektion
α −Effekt erzeugt
Strom parallel
zum ursprünglichen
toroidalen
Magnetfeld
Strom erzeugt ein
Magnetfeld parallel
zum ursprünglichen
poloidalen Feld
=> effektive Verstärkung
des ursprünglichen
Magnetfeldes
Abbildung 9: Schematische Funktionsweise eines αω-Dynamos.
16
8 DER GLATZMAIER-ROBERTS-DYNAMO
Dynamomodelle
Kinematische Modelle
Free-Decay-Model:
Magnetfeld zerfällt gemäß
der Induktionsgleichung (37)
αω−,α2 −,α2 ω− Dynamo
8
Dynamische Modelle
Weak - Field“ :
Strong - Field“ :
~ ¿2 Ω
~ × ~v + ∇P
~”
j×B
~ ≥2 Ω
~ × ~v + ∇P
~j” × B
Geostrophisches
”
Gleichgewicht“ :
Glatzmaier”
Roberts-Dynamo“
:
~ × ~v = − 1 ∇P
2Ω
ρ
Strong-Field“ +
”
innerer Erdkern
Der Glatzmaier-Roberts-Dynamo
1994 berechneten die Physiker Gary Glatzmaier vom Los Alamos National Laboratory und Paul
Roberts von der University of California ein selbstkonsistentes Strong-Field-Modell“, welches erst”
mals Details einer Magnetfeldumpolung offenbarte.
8.1
Das Modell
In dem Glatzmaier-Roberts-Dynamo werden die Gleichungen (27) bis (35) für eine sphärische Geometrie mit einem Spektralverfahren [8] gelöst. Durch einen homogenen Wärmefluß an der InnerenKern-Grenze (ICB) wird Konvektion in einer, den Kern umschließenden Kugelschale angetrieben.
Beeinflußt durch die Rotation werden die Strömungen verwirbelt, erzeugen ein neues Magnetfeld (α
und ω-Effekt) und ersetzen so das Feld welches im Laufe der Zeit zerfällt (siehe Abschnitt 7.1). Das
Magnetfeld durchdringt den Inneren Kern und erzeugt analog zum Rikitake Dynamo ein magnetisches Drehmoment zwischen dem Inneren und dem Äußeren Kern. Im Verlauf der Rechnung erfolgt
ein Drehimpulstranport zwischen innerem Kern und unterem Mantel, was zu einer Änderung der
Rotationsperiode von Kern und Mantel führt. Dies wird ebenfalls in dem Modell berücksichtigt.
Nach dem Einfügen von kleinen Temperaturvariationen im äußeren Kern und einem kleinen Saat”
Feld“ konnte die Simulation des Geodynamos beginnen. Mit einer zeitlichen Auflösung von 20
Tagen wurde das numerische Modell über einen Zeitraum von 400000 Jahren berechnet. Nach über
einem Jahr Rechenzeit an einer Cray C-90 lagen die Ergebnisse vor [9].
8.2
8.2.1
Ergebnisse
Die Feldstruktur
10000 Jahre nach dem Beginn der Rechnung hatte sich eine dominante Dipolstruktur des Magnetfeldes außerhalb des äußeren Kerns gebildet, welche dem Magnetfeld der Erde sehr ähnlich ist
(siehe Titelbild). Abb. 7 zeigt ein Spektrum der Gauss-Koeffizienten des Feldes berechnet aus dem
numerischen Modell (Kreise) bis zum Grad und Ordnung 12. Zum Vergleich wurden die MAGSATDaten des Erdmagnetfeldes (Dreiecke) geplottet. Die numerischen Daten sind etwas kleiner als die
des irdischen Feldes. Durch das fehlende Krustenfeld ist die Steigung bei höheren Ordnungen im
numerischen Modell größer, als in den MAGSAT-Daten. Das Nichtdipol-Feld blieb jedoch nicht konstant, sondern zeigte eine Westwärtsdrift von 0.2◦ /a, in guter Übereinstimmung mit dem irdischen
Magnetfeld.
9 DER SOLARE DYNAMO
8.2.2
17
Magnetfeldumpolungen
Nach 36000 Jahren polte sich der Dynamo in einem Zeitraum von 1000 Jahren plötzlich um und behielt die neue Dipolstruktur für die restlichen 4000 Jahre der Rechnung bei. Auf der Hompage von
Gary Glatzmaier [11] ist in Abb. 3 die Feldlinienstruktur während der Umpolung dargestellt. Vor
und nach der Umpolung dominiert die Dipolstruktur. Während der Umpolung wird das Dipolfeld
jedoch schwächer und das Quadrupolfeld beginnt zu dominieren. Eine genaue Analyse der numerischen Rechnung zeigte, daß der äußere Kern auf einer Zeitskala von einigen 100 Jahren versucht
das Magnetfeld umzupolen. Dies gelingt jedoch in den meisten Fällen nicht, da die Dipolstruktur
des inneren Kerns nur auf einer Zeitskala von 1600 Jahren zerfallen kann. Erst wenn das Dipolfeld
im inneren Kern zerfallen ist, kann das umgepolte Feld des äußeren Kerns in den inneren Kern
diffundieren und es kommt zu einer globalen Umpolung. Die Umpolungsversuche im äußeren Kern
könnten die Ursache für magnetische Exkursionen sein (siehe Abb. 9).
8.2.3
Inhomogener Wärmefluß an der CMB
Nach dem Erfolg der ersten numerischen Simulation wurden weitere Rechnungen durchgeführt.
Dabei wollte man insbesondere den Einfluß des Wärmeflußes an der CMB auf das Verhalten des
Geodynamos studieren. 1999 veröffentlichten Glatzmaier et al. ein Paper in Nature [12]. Für acht
verschiedene Wärmeflußmuster hatte man jeweils das Verhalten des Geodynamos über einen Zeitraum von 100000 bis 300000 Jahren studiert. Abb. 8 zeigt die Ergebnisse dieser Rechnungen. Die
maximale Abweichung vom mittleren Wärmefluß liegt bei ± 0.0446 W m−2 . In einigen Fällen polt
sich das Feld häufig um (A,C), in einem (E) allerdings gar nicht. Im Fall F fällt das Dipolmoment sogar auf Null. Um den Bedingungen in der Erde möglichst nahe zu kommen wurde auch
ein Wärmefluß verwendet, der auf Daten aus der seismischen Tomographie beruht (Fall H). Am
erdähnlichsten ist jedoch der homogene Wärmefluß (G). Die Variation der Breite des magnetischen Poles ist gering und die Umpolung läuft scharf begrenzt in einem kurzen Zeitraum ab. Dies
macht sich auch in der Form der Polwanderungskurve bemerkbar (Abb. 10). Zudem zeigt Fall G
als einziges Modell eine deutliche Abnahme des Dipolmomentes während einer Umpolung.
9
Der Solare Dynamo
Aufgrund der starken turbulenten Konvektionsbewegung im Inneren der Sonne ist eine zum Geodynamo analoge numerische Berechnung des solaren Magnetfeldes (noch) nicht möglich. Aus diesem Grund beschränkt man sich auf kinematische Dynamomodelle. Die Impelemtierung eines αωDynamos führt jedoch zu Problemen. Nimmt man an, daß der Sonnen-Dynamo in der gesamten
convektiven Zone entsteht, so führen die hohen Konvektionsgeschwindigkeiten zu einem schnellen
Aufstieg der Magnetfelder und damit zu einer geringen Wirkung des α-, bzw. ω-Effekts auf die
Abbildung 10: Powerspektrum (aus [10])
9 DER SOLARE DYNAMO
18
Abbildung 11: Geodynamomodelle für 8 unterschiedliche Wärmeflußmuster an der CMB (aus [10])
9 DER SOLARE DYNAMO
19
Abbildung 12: Eine geomagnetische Exkursion (aus [10])
Abbildung 13: Powerspektrum und Polwanderungskurven für den Fall G (2.Umpolung)(aus [10])
9 DER SOLARE DYNAMO
20
Magnetfeldlinien. Geringere Aufstiegsgeschwindigkeit finden sich im Übergangsbereich zwischen
radiativer und konvektiver Zone.
10 ZUSAMMENFASSUNG UND AUSBLICK
10
21
Zusammenfassung und Ausblick
Nach fast 100 Jahren Dynamotheorie zeichnet sich allmählich ein Bild von der Entstehung des
Magnetfeldes im äußeren Erdkern ab. Einen wesentlichen Beitrag zum Verständnis brachte dabei
der Glatzmaier-Roberts-Dynamo, der erstmals in der Lage ist neben der Entstehung auch die
Dynamik des Erdmagnetfeldes zu erklären. Leistungsfähigere Computer, verbesserte numerische
Codes, sowie bessere experimentelle Daten der Zustandsgrößen im Erdkern werden in Zukunft ein
noch detaillierteres Bild vom Geodynamo offenbaren.
Literatur
[1] Rikitake, T. 1958, Oscillations of a system of disc dynamos“, Proc.Camb.Phil.Soc., 54, 89-105
”
[2] D.L.Turcotte, Fractals and Chaos in Geology and Geophysics“, Cambridge University Press
”
1997
[3] Etienne Guyon, Jean-Pierre Hulin, Luc Petit, Hydrodynamik“, Vieweg 1997
”
[4] L.Landau, Lehrbuch der Theoretischen Physik VI: Hydrodynamik“, Akademie Verlag 1971
”
[5] G.K.Batchelor, An Introduction to Fluid Mechanics“, Cambridge University Press 1967
”
[6] D.J.Tritton, Physical Fluid Dynamics“, Van Nostrand 1989
”
[7] S.Chandrasekhar, Hydrodynamic and Hydromagnetic Stability“, Oxford University Press
”
1961
[8] http : //www − personal.engin.umich.edu/ jpboyd/aaabook 9500may00.pdf
[9] G.A.Glatzmaier, P.H.Roberts, A three-dimensional self consistent computer simulation of a
”
geomagnetic field reversal“, Nature, 377, 203-209
[10] www.es.ucsc.edu/grad/research/groups/paleomag/simulations.html
[11] http://www.igpp.lanl.gov/Geodynamo.html
[12] Glatzmaier et al. 1999, The role of the Earth’s mantle in controlling the frequency of geoma”
gnetic reversals“, Nature, 401, 885-890
[13] http://solar.physics.montana.edu/YPOP/Spotlight/Magnetic/cycle.html
[14] Stuiver,M., Braziunas,T.F., 1988, in Secular Solar and Geomagnetic Variations in the Last
10,000 Years, Hrsg. F.R. Stephenson und A.W. Wolfendale, NATO ASI 236, Kluwer, Dordrecht