Arbeit und Leistung
Werbung

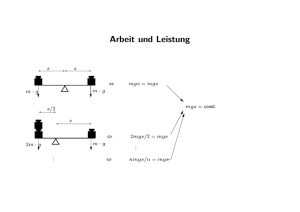
Arbeit und Leistung s s m·g m·g ⇔ mgs = mgs mgs = const. s/2 s m·g 2m · g .. . ⇔ 2mgs/2 = mgs ⇔ nmgs/n = mgs .. . Arbeit und Leistung Arbeit ist Kraft mal Weg • • • • Gotthardstraße Treppe und Lift Feder Bergsteiger/Wanderer Arbeit und Leistung F~Zug F~tot = F~Zug − F~k F~k h s m·g l = s cos α α Gleichmässige Bewegung: F~zug = −F~k Fk = m · g · sin α A = Fk · s ; s = sinhα A = mgsinsinααh = mgh Arbeit und Leistung Wunder ist kein Wunder Simon Stevin, um 1600 Arbeit und Leistung E= R d~s · F~ = R ds F cos α F~ α d~s Arbeit und Leistung Arbeit ist Kraft mal Weg [Arbeit] = N m = J = W s Leistung = Arbeit pro Zeit [Leistung] = N m/s = J/s = W Beispiel: 100 kg Backsteine 10 m hochtragen. E = mgh = 100 · 9, 81 · 10 kg m2/s2 = 9810 J = 2, 725 Wh dito innerhalb von 10 Minuten: Leistung P = 9810/600 J/s = 16, 35 W. Potentielle und kinetische Energie • Energie: gespeicherte, “mögliche” (potentielle) Arbeit • potentielle Energie: Lageenergie (Wasser im Stausee,. . . ) • kinetische Energie: Bewegungsenergie Epot = mgh −→ vh = p vh2 mgvh2 m 2 2gh −→ h = =⇒ mgh = = vh = Ekin 2g 2g 2 Energieerhaltung Energie bleibt erhalten bzw. wird umgewandelt, d. h. E = Epot + Ekin = const. Beispiele: • Pendel • Galilei’sches Hemmungspendel Formal: Z dv m 2 E = dx ma = m dx = m v dv = v . dt 2 Umwandlung von potentieller in kinetische Energie. Oft wird Energie auch in andere Formen umgewandelt, wie Wärme, Schall, Deformation, etc. Z Z Bewegung in Systemen mit mehreren Massenpunkten Wir betrachten ein System mit mehreren Massenpunkten. Für jeden Massenpunkt i einzeln gilt nach Newton 2: d~ pi Fi = . dt Für n Massenpunkte muss also ein System von n Bewegungsgleichungen gelöst werden. Vereinfachend beginnen wir mit n = 2. d~ p1 F~1 + F~21 = , dt d~ p2 ~ ~ , F2 + F12 = dt wobei F~21 die Kraft darstellt, welche Massenpunkt 2 auf Massenpunkt 1 ausübt. F~1 stellt die Kraft dar, welche von außen auf Massenpunkt 1 wirkt. Die Kräfte können z. B. vom Ort oder der Geschwindigkeit abhängen. Nach Newton 3 ist F~21 = −F~12. Damit fallen die “inneren” Kräfte beim Bilden der Summe der Bewegungsgleichungen heraus: p2 d~ p d~ p1 d~ + = . F~ = F~1 + F~2 = dt dt dt Ist F~ = 0, so ist d~ p = 0, bzw. p~ = const., dt analog zum zweiten Newtonschen Gesetz. Ohne Einwirkung äußerer Kräfte (F~ = 0) bleibt in einem System von n p Massenpunkten der Gesamtimpuls erhalten ( d~ dt = 0). Impuls und Impulserhaltung ~v1 = ~v2 = ~0 ~u1 m1 m2 ~u2 Danach muss gelten m1u1 + m2u2 = 0, woraus sofort folgt, dass m1 u1 . m2 Beispiel: Rakete, hier verändert sich allerdings m mit der Zeit. . . u2 = − Impuls und Impulserhaltung Anwendung: Ballistisches Pendel α √ u2 = 2g ∆h mv1 = (m + M )u2 v1 = . . . Übung! l ∆h v1 m M M +m u2 Frage: Wie groß ist der Anteil der Energie, der in Wärme und Deformation umgewandelt wird? Stöße Man unterscheidet verschiedene Sorten von Stößen: • inelastischer Stoß: endotherm, Umwandlung kinetischer Energie in innere Energie (z. B. Wärme) • elastischer Stoß: Energieerhaltung • schiefer Stoß: Geometrieeffekte • (exothermer Stoß: Umwandlung innerer Energie in kinetische Energie (z. B. e− − e+ −→ 2γ)) Inelastische Stöße u1 v1 u2 v2 teilweise inelastisch v1 v2 u vollständig inelastisch Inelastische Stöße II Vollständig inelastischer Stoß: m1v1 + m2v2 = (m1 + m2)u, m1v1 + m2v2 also u = . (m1 + m2) Vorzeichen von v1 und v2 beachten! Für m1 = m2 gilt offensichtlich u= v1 + v2 . 2 Aus den Geschwindigkeiten lässt sich die in innere Energie verwandelte kinetische Energie berechnen (Übung!). Elastische Stöße Zusätzlich bleibt kinetische Energie erhalten! 1 1 1 1 2 2 2 m1v1 + m2v2 = m1u1 + m2u22, 2 2 2 2 m1v1 + m2v2 = m1u1 + m2u2. Zwei Unbekannte, zwei Gleichungen! Sortiere nach Körpern 1 und 2: 1 1 2 2 2 2 m1 v1 − u1 = m2 u2 − v2 , 2 2 m1 (v1 − u1) = m2 (u2 − v2) . Dividiere Gleichung 1 durch Gleichung 2 und löse nach u1 und u2 auf. (1) (2) Elastische Stöße u1 = u2 = 2m2 m1 − m2 v1 + v2 m1 + m2 m1 + m2 m2 − m1 2m1 v2 + v1 m1 + m2 m1 + m2 Spezialfälle: • m1 = m2 =⇒ u1 = v2 und u2 = v1 • m1 ≫ m2 =⇒ u1 ≈ v1 und u2 ≈ 2v1 − v2 (3) (4) Stoß mit einer unbeweglichen Wand m1 , u1 m1, v1 m2 = ∞ v2 = 0 u2 = 0 Mehrere Körper auf einer Linie v1 m1 n1m1v1 = n2m2v2 (Impulssatz); v2 m2 n n2 n1 m1v12 = m2v22 (Energiesatz). 2 2 m1 = m2 =⇒ n1 = n2 Bewegung in der Ebene v2,y v1,x y v2,x v1,y v 1 x v2 α α Überlagerung einer Bewegung entlang von x mit einer Reflexion an einer Wand. v2,x = v1,x; v2,y = −v1,y m2 6= ∞ Wie soll nun ein Stoß in der Ebene behandelt werden, wenn m2 6= ∞? Aus der Impuls- und Energieerhaltung m1~v1 + m2~v2 = m1~u1 + m2~u2, 1 1 1 1 2 2 2 m1v1 + m2v2 = m1u1 + m2u22 2 2 2 2 ergeben sich nur drei Bedingungen an die vier Unbekannten u1,x, u1,y , u2,x und u2,y . Offensichtlich wird die Situation in drei Dimensionen noch schlimmer, 6 Unbekannten stehen nur vier Gleichungen gegenüber. Diese prinzipielle Schwierigkeit lässt sich nicht beheben, wohl aber in handlichere Teilprobleme unterteilen. Der Schwerpunkt eines Systems m1 ~r1 z m2 ~r2 m3 ~rS ~r3 y x N X m ~ r 1 . i i mi~ri ~rS = Pi=1 = N M i=1 mi i=1 PN Schwerpunktgeschwindigkeit Greifen keine äußeren Kräfte an, so bleibt der Impuls des Systems konstant. N X d~ pi i=1 dt = 0. Verändern sich die Massen nicht, so ändert sich auch die Geschwindigkeit des Systems nicht, genauer, N X d~vi = 0. mi dt i=1 Damit lässt sich eine mittlere Geschwindigkeit definieren, welche unverändert bleibt: Offensichtlich ist N . 1 X ~vS = mi~vi. M i=1 d~rS , dt d. h. die Geschwindigkeit des Schwerpunktes des Systems bleibt erhalten. Oft vereinfachen sich die auftretenden Gleichungen erheblich, wenn man in das Schwerpunktsystem transformiert, denn ~vS = p~S = N X mi~vi = M~vS i=1 p~S,S = N X i=1 mi (~vi − ~vS ) = N X i=1 mi~vi − N X i=1 mi~vS = M~vS − M~vS = ~0. Die kinetische Energie transformiert sich ebenso einfach: Ekin = = = = Ekin = 1 1 2 m1v1 + m2v22 2 2 1 2 2 m1(~v1,S + ~vS ) + m2(~v2,S + ~vS ) 2 1 1 2 2 2 2 m1v1,S + m2v2,S + m1vS + m2vS + (m1~v1,S + m2~v2,S ) · ~vS 2 2 1 1 2 2 2 2 m1v1,S + m2v2,S + m1vS + m2vS + 0 2 2 1 (S) Ekin + M vS2 2 weil ja (m1~vS + m2~vS ) = ~0. Bewegung zweier Teilchen im Schwerpunktsystem Nach Voraussetzung wirken keine äußeren Kräfte auf das System, d. h. es wirken nur die inneren Kräfte F~12 und F~21. d~v1,S F~21 ; = dt m1 d~v2,S F~12 = dt m2 Subtraktion (unter Berücksichtigung von F~12 = −F~21) liefert d(~v1,S − ~v2,S ) = dt 1 1 + F~21, m1 m2 wo (~v1,S − ~v2,S ) = ~v12,S die Relativgeschwindigkeit zwischen den Teilchen darstellt. Mit der Definition der reduzierten Masse µ . m1 m2 µ= m1 + m2 kann so eine besonders einfache Bewegungsgleichung gefunden werden dv12,S . F~21 = µ dt Die Bewegung der beiden Teilchen kann also auf die Bewegung eines einzelnen Teilchens der reduzierten Masse µ reduziert werden. Elastische Stöße im Schwerpunktsystem Wegen p~S,S = ~0 muss auch gelten p~1,S = −~ p2,S und p~′1,S = −~ p′2,S . Einsetzen in den Energiesatz ergibt 1 1 1 1 1 1 = + p′2 + p21,S + Q. 1,S 2 m1 m2 2 m1 m2 Verwende reduzierte Masse µ, so p21,S p′2 1,S = + Q. 2µ 2µ 2 Für elastische Stöße ist Q = 0 (nach Definition), folglich p′2 1,S = p1,S und 2 p′2 2,S = p2,S . Dies lässt lediglich eine Drehung der Impulse zu! ~v1′ ~v2,S ~v2 ~v1′ ,S θ ~v2′ Laborsystem ~v1,S ~v2′ ,S ~v1 Schwerpunktsystem Relativistische Formulierung y K ~ vA ~ uA A u=0 x B ~ vB y′ ~ uB K′ ~ vA u = vxA ~ uA A B ~ uB ~ vB x′ Wir betrachten nun zwei Körper derselben Masse mA = mB = m, die sich bei relativistischen Geschwindigkeien begegnen. Wie sieht ein Stoß in diesem Falle aus? Dabei bewegen wir uns in einem System K so, dass sich der Körper A in y Richtung nur sehr langsam bewegt und diese Impulskomponente beim Stoß umgekehrt wird, vyA = −uyA. Dasselbe geschehe mit Körper B und Körper A bewege sich immer noch mit Geschwindigkeit vxA in x-Richtung. Der Impuls ist also erhalten. Nun betrachten wir den Stoß im System K ′, welches sich mit v = vxA entlang der x-Achse bewegt. In diesem System sind also die Rollen von A und B vertauscht. Die Geschwindigkeiten transformieren sich gemäß der Lorentz-Transformation, vy′ vy /γ . = 1 − vxv/c2 Nun ist im System K für die beiden Teilchen die Geschwindigkeit in x-Richtung verschieden, weshalb sich auch die y-Komponenten der Geschwindigkeit anders transformieren! ′ = vyA vyA/γ vyA/γ = = γvyA, 2 2 2 1 − vxAv/c 1 − v /c ′ vyB vyB /γ = vyB /γ, 2 1 − vxB v/c = da v = vxA, da vxB = 0, während die entsprechenden Geschwindigkeiten im System K die Beträge |vyA| und |vyB | haben, also ′ ′ vyB vyA 1 = γ und = . vyA vyB γ In beiden Systemen gilt der Impulssatz. Weil beide System K und K ′ so gewählt sind, dass beide Körper die y-Komponente ihres Impulses umdrehen, gilt ′ ′ . + m′B vyB mAvyA + mB vyB = 0 = m′AvyA Dies ist aber für mA = m′A und mB = m′B nicht möglich, weil ja die yKomponenten der Geschwindigkeiten verschieden sind. Also müssen die Massen m und m′ verschieden sein! Für kleine y-Komponenten gilt die Näherung vA ≈ vxA = v VB ≈ 0 ′ , vA ≈ 0, ′ ≈ vxB = v. , vB . Damit können wir mit m0 = m(v = 0) schreiben m(v)vyA + m0vyB = 0, ′ m0vyA + m(v)vy′ B = 0. ′ Wir nehmen die Terme mit vyB bzw. vyB nach rechts, dividieren die Gleichungen und erhalten ′ m2(v) vyB vyA 2 = γ . = ′ v m20 vyB yA m0 Damit erhalten wir . m(v) = γm0 = p 2 2 1 − v /c Relativistische Energie: E = mc2 Wir wollen nun noch die bekannt EnergieMasse Beziehung E = mc2 verstehen. Dazu E betrachten wir einen leichten Wagen, an Schwerdessen linker Wand ein Lichtblitz der Energie Lichtblitz punkt E ausgesandt wird. Nach den Gesetzen der klassischen Physik hat er einen Impuls p = ∆x E/c (Stoff kommt im zweiten Semester). Weil E der Wagen vor dem Blitz ruhen soll, muss auch nach dem Blitz der Schwerpunkt am selben Ort bleiben, der Gesamtimpuls bleibt erhalten. Deshalb muss sich der Wagen ein klein wenig nach links bewegen mit einer Geschwindigkeit v = −p/M = −E/M c. Weil diese Geschwindigkeit sehr klein ist im Vergleich zur Lichtgeschwindigkeit, L v ≪ c, erreicht der Lichtblitz die rechte Wand nach einer Zeit ∆t = L/c, während der sich der Wagen lediglich um ∆x = v∆t = −EL/M c2 nach links bewegt hat. Erreicht der Blitz die rechte Wand, so hält der Wagen an. Damit der Schwerpunkt unbewegt bleibt, muss dem Licht eine Masse m zugeschrieben werden! mL + M ∆x = 0. Daraus folgt mL − M EL/M c2 = 0, =⇒ E = mc2. Setzen wir darin nun unseren Ausdruck für die Masse ein, so finden wir m0c2 E=p = m0c2 − (m(v) − m0)c2, 1 − v 2/c2 wobei der erste Term dies sog. Ruheenergie und der zweite die eigentliche kinetische Energie ist. Für diese gilt mit einer Potenzreihenentwicklung für γ Ekin 4 1 3 v = (m(v) − m0) c2 = m0v 2 + m0 2 + . . . 2 8 c Für kleine Geschwindigkeiten v ≪ c finden wir den klassischen Ausdruck wieder. Für richtige Rechnungen ist es oft nützlicher, die Energie-Impuls Beziehung zu kennen: q E = c m20c2 + p2. Relativistische Kraft Wir nehmen den relativistischen Impuls p = γm0v und das zweite Newtonsche Gesetz und erhalten F~ = = d d m0~v d~ p p = (m~v ) = dt dt dt 1 − v 2/c2 ! d m0 p ~v + m~a. dt 1 − v 2/c2 ! , Die innere Ableitung in der Klammer wird mit d/dt = (dv/dt)(d/dv) durch- geführt: F~ 2 = m0 v/c (1 − a 3/2 v 2/c2) 2 ~v + m~a, 2 v ~v v ~a 3 = γ m0 a 2 + 1 − 2 . c v c a Die Kraft hat also nicht nur eine Komponente in Beschleunigungsrichtung ~a/a, sondern auch in Geschwindigkeitsrichtung ~v /v! Diese wird aber für kleine Geschwindigkeiten v ≪ c vernachläßigbar.