Aktorik Datei
Werbung

SRLA
Aktoren
Version 1.4
HTL Mössingerstraße, Abt. Elektronik
DI. Harald Grünanger
Dezember 2013
Nur für den Unterrichtsgebrauch gedacht,
darf nicht an Dritte weitergegeben werden!
Inhaltsverzeichnis
1
2
Allgemeines................................................................................................
................................
.................................................... 4
1.1
Einführung ................................................................................................
................................
............................................... 4
1.2
Aktoren................................................................................................
................................
.................................................... 5
1.3
ElektromagnetischeAktoren................................................................
..................................................... 6
1.3.1
Die Größen im magnetischen Kreis ................................................................
.................................. 6
1.3.2
Motor– und Generatorprinzip ................................................................
............................................ 7
1.3.3
Induktionsgesetz ..............................................................................................
.............................. 8
1.3.4
Drehstrom und Wechselstrom ................................................................
.......................................... 8
Gleichstrommaschinen ................................................................................................
................................
................................... 9
2.1
2.1.1
Aufbau und Wirkungsweise ................................................................
.............................................10
2.1.2
Rückwirkung der Ankerspule ................................................................
...........................................10
2.1.3
Prinzip der Kommutierung (Stromwendung) ....................................................11
................................
2.2
3
5
Betriebsverhalten der Gleichstrommaschine ..........................................................11
................................
2.2.1
Schaltungsarten ..............................................................................................
..............................11
2.2.2
Reihenschlussmaschinen ................................................................
................................................12
2.2.3
Nebenschlussmaschine ................................................................
..................................................13
Wechselstrommotor Allgemeines ................................................................
..................................................14
3.1
4
Prinzip der Gleichstrommaschine ................................................................
...........................................10
Entstehung des Drehfeldes ................................................................
....................................................14
Asynchronmaschine ................................................................................................
................................
......................................15
4.1
Ständerschaltungen ...............................................................................................
...............................16
4.2
Drehzahlregelung ................................................................................................
................................
...................................18
4.2.1
Polumschaltbare Asynchronmaschinen ...........................................................
...........................18
4.2.2
Frequenzumrichter ................................................................
..........................................................18
Synchronmaschine ................................................................................................
................................
........................................19
Prinzip ...........................................................................................................................
................................
...........................19
Erregerstrom ................................................................................................
................................
.................................................19
5.1
Polradwinkel und Momentenkennlinie ................................................................
....................................19
5.1.1
Motorbetrieb ................................................................................................
................................
....................................19
5.1.2
Generatorbetrieb .............................................................................................
.............................20
5.1.3
Momentenkennlinie ................................................................
.........................................................20
5.1.4
Drehzahlregelung ............................................................................................
............................20
6
Begriff Servomotor ................................................................................................
................................
........................................21
7
Anwendungen ................................................................................................
................................
...............................................21
7.1
Windenergiegenerator ............................................................................................
............................21
Aktoren_1314_v14
Seite 2 /33
7.2
8
Motoren für Elektroautos ................................................................
........................................................22
Reluktanzaktoren ................................................................................................
................................
..........................................24
8.1
Schrittmotoren Allgemein ................................................................
.......................................................24
8.1.1
Prinzipieller Aufbau und Wirkungsweise von Schrittmotoren ...........................24
...........................
8.1.2
Eigenschaften von Schrittmotoren: ................................................................
..................................25
8.1.3
Ansteuertechniken: ................................................................
.........................................................25
8.1.4
Betriebsarten von Schrittmotoren ................................................................
....................................26
8.2
Reluktanzschrittmotor.............................................................................................
.............................27
8.3
Permanentmagnet-Schrittmotor
Schrittmotor................................................................
..............................................28
8.4
Hybridschrittmotor ................................................................................................
................................
..................................28
8.4.1
9
Wirkungsweise und Eigenschaften ................................................................
..................................29
8.5
Spezifischen Eigenschaften von Schrittmotoren: ....................................................30
................................
8.6
Spezielle Bauformen ..............................................................................................
..............................31
6.4.1
Bürstenlose
rstenlose Gleichstrom Maschinen (Brushless
(
DC Motor) ............................31
............................
6.4.2
Linearmotoren ................................................................................................
................................
.................................32
Versionsverwaltung ................................................................................................
................................
.......................................33
Aktoren_1314_v14
Seite 3 /33
1 Allgemeines
1.1 Einführung
Motivation:
http://www.youtube.com/watch?v=VhaYLnjkf1E
http://www.youtube.com/watch?v=Arow3X8Tphc
http://www.sciencebuddies.org/science
http://www.sciencebuddies.org/science-fair-projects/project_ideas/Elec_p051.shtml#procedure
projects/project_ideas/Elec_p051.shtml#procedure
Quelle: http://de.wikipedia.org/wiki/Aktor, http://www.zawm.be/download/Sensor-d.pdf
http://www.zawm.be/download/Sensor
Allen elektronischen Systemen gemeinsam ist, dass sie nach dem EVA-Prinzip
EVA Prinzip der
Informationsverarbeitung arbeiten.
Bei der Eingabe handelt es sich grundsätzlich um Sensoren, die auch als Signalgeber,
Fühler oder Messwertaufnehmer bezeichnet werden.
werden
Die Verarbeitung der elektrischen Signale erfolgt durch einen zentralen Mikrocomputer
(Steuergerät) oder ähnliches, der mit Hilfe von einprogrammierten mathematischen Formeln
und Kennfeldern die Entscheidungen trifft und die Aktoren ansteuert.
a
Auf der Ausgabe befinden sich die Aktoren (Stellglieder, Wandler; auch Aktuatoren),
Aktuatoren die die
Befehle des Steuergerätes in mechanische Bewegung oder andere physikalische Größen (z.
B. Druck oder Temperatur) umsetzen
um
und greifen so regulierend in das Regelungssystem ein
und/oder geben Sollgrößen vor.
Den eigentlichen Vorgang der Umwandlung nennt man Aktorik.
Aktoren_1314_v14
Seite 4 /33
In den meisten
en Fällen führt der Aktor eine mechanische Bewegung aus. Der Aktor wird nach
der Art der benutzten Hilfsenergie klassifiziert.
Als
ls Hilfsenergie wird die elektrische-,
elektrische die strömungs-, die chemische- und thermische
Energie eingesetzt. Zu den Aktoren, die elektrische Energie als Hilfsenergie nutzen, gehören
die Elektromotoren und Elektromagnete. Sie stellen die derzeitig technisch am meist benutze
Anzahl der Aktoren dar.
Die Einsatzgebiete von Aktoren sind in allen Bereichen
Bereichen unserer Umwelt, wie z.B.
z. in CDPlayern (Bewegung des Schreib-Lese-Kopfes),
Schreib
Kopfes), Waschmaschinen (Schleudern), Heizungen,
Klimaanlagen etc. zu finden.
1.2 Aktoren
Quelle: http://www.uni-siegen.de/fb12/es/inhalt/lehre/smk/smk1/aktoren.pdf
siegen.de/fb12/es/inhalt/lehre/smk/smk1/aktoren.pdf
Wirkungen der Aktoren:
•
•
•
•
Linear- und Drehbewegungen
Schalten von Ventilen zur Steuerung von Stoff-Flüssen
Stoff Flüssen (z.B. Hydraulik)
Optische oder akustische Signale
Ansteuerung von Relais oder elektronischen Schaltern
Es sind 3 Fälle zu beachten:
Aktoren_1314_v14
Seite 5 /33
1.3 ElektromagnetischeAktoren
Elektromagnetische
Bei elektromagnetischen Aktoren erfolgt die Umwandlung von elektrischer in mechanische
Leistung unter Ausnutzung elektromagnetischer Felder. Die Wirkungsweise von
elektromagnetischen Aktoren beruht auf der Lorentzkraft. Diese tritt auf, wenn sich ein
stromdurchflossener
durchflossener Leiter in einem Magnetfeld befindet, wobei der Strom und das
Magnetfeld Relativbewegungen gegeneinander ausführen können.
1.3.1 Die Größen im magnetischen Kreis
Das magnetische Feld ist an einem bestimmten Punkt gekennzeichnet durch eine bestimmte
bestim
Stärke und Richtung. Diese Feldgröße wird „magnetische Flussdichte“ oder „magnetische
Induktion“ B genannt und in [T] (Tesla) gemessen.
Ursache für die magnetische Erscheinung ist die „Durchflutung“ Θ{Theta} in [A] bzw. die
magnetische Spannung. Für Elektromagneten
E
gilt die Beziehung:
Θ = I ⋅ N = H ⋅l
N ist dabei die Anzahl der Windungen (nicht verwechseln mit der Drehzahl, es wird daher
auch oft „w“ statt „N“ verwendet), H ist die „magnetische Erregung“ oder „magnetische
Feldstärke“ in [A/m], l die Länge des magnetischen Kreises (z.B. Luftspalt).
Die Durchflutung Θ entspricht der Quellenspannung U im elektrischen Stromkreis. Sie ruft
einen „magnetischen Fluss“ Φ{Phi}
Φ
in [Wb] (Weber) hervor, der bezogen auf
a die Fläche die
magnetische Flussdichte Bergibt.
ergibt.
r r
Φ = B⋅ A
Im magnetischen Ersatzschaltbild lässt sich ein magnetischer Widerstand Rm definieren:
Rm =
Aktoren_1314_v14
l
Θ
=
Φ µ0 ⋅ µr ⋅ A
Seite 6 /33
Der Kehrwert des magnetischen Widerstandes Rm ist der magnetische
he Leitwert Λ = Φ / Θ in
{Lambda}[H]
[H] (Henry). Aus den genannten Gleichungen ergibt sich der Zusammenhang
zwischen magnetischer Flussdichte und magnetischer Erregung zu
r
r
B = µ ⋅H
wobei µ = µ0 • µr die Permeabilität ist. µ0 ist die Permeabilität von Luft (4 • π • 10–7 [H / m]), µr
beschreibt den Einfluss des jeweiligen Materials.
Hinweis:
Formt man einen Draht zu einer Spule, kann man ein Magnetfeld erzeugen, das dem
Magnetfeld eines Stabmagneten ähnelt – mit dem Vorteil, dass sich das Feld ein‐
ein und
ausschalten lässt.
1.3.2 Motor– und Generatorprinzip
In elektrischen Maschinen werden jene magnetischen Erscheinungen ausgenutzt, die als
Folge von Elektronenbewegungen in elektrischen Leitern auftreten. Dabei sind zwei
Wirkungen besonders wichtig.
Motorprinzip
Auf einen in einem Magnetfeld befindlichen stromdurchflossenen Leiter wird eine
mechanische Kraft ausgeübt, die der Induktion B des magnetischen Feldes, der Länge l des
Leiters und der Stromstärke I proportional ist:
r r
r
F =I ⋅ ∫ d l × B
l
Dabei gilt die „Linke–Hand–Regel
Regel“: Treten die Feldlinien (N → S) in die Fläche der linken
Hand ein und zeigen die Finger die Stromrichtung an, so bewegt sich der Leiter in Richtung
des abgespreizten Daumens.
Generatorprinzip
Wird ein Leiter in einem Magnetfeld bewegt, werden die Leitungselektronen in eine
bestimmte Richtung abgedrängt. Es entsteht
entsteht eine elektrische Spannung U, die der Induktion
B, der Leiterlänge l und der Geschwindigkeit v proportional ist:
(
)
r r
U q = − ∫ v × B ⋅ dl
Aktoren_1314_v14
Seite 7 /33
Dabei gilt die „Rechte–Hand–
–Regel“:
“: Treten die magnetischen Feldlinien (N → S) in die
Fläche der rechten Hand ein und bewegt sich der Daumen in Richtung der Geschwindigkeit
des Leiters, so zeigen die Finger die Richtung des induzierten Stromes an.
1.3.3 Induktionsgesetz
In den Windungen einer Spule, die mit einer Geschwindigkeit v in einem magnetischen Feld
mit FlussΦ bewegt wird, wird eine Spannung induziert, die der Änderung des Flusses und
der Anzahl der Windungen proportional ist („Induktionsgesetz“):
u=N
dΦ
dt
Da nur die Änderung des Flusses zählt, ist es natürlich auch möglich, die Spule nicht zu
bewegen und dafür den FlussΦ
Fluss zu ändern.
Da jeder stromdurchflossene Leiter von einem Magnetfeld umgeben ist, ergibt sich auch aus
jeder Stromänderung eine Änderung des magnetischen Feldes. Nach dem Induktionsgesetz
entsteht daraus eine Quellenspannung u der Selbstinduktion:
u = −L
di
dt
L ist die Induktivität in [H]. Sie ist dem magnetischen Leitwert proportional: L = N2Λ.
1.3.4 Drehstrom und Wechselstrom
Die bei einem elektrischen Netz wichtigen Begriffe – Drehstrom und Wechselstrom – sollen
hier erklärt werden:
Drehstrom
Der Drehstrom (oder auch 3-phasiger
phasiger Wechselstrom)
chselstrom) wird in Generatoren erzeugt und in
Leitungen an die Verbraucher elektrischer
ktrischer Energie herangeführt. Das Netz besteht aus den
dreii stromführenden Leitern L1, L2 und L3, sowie einem Neutralleiter N und Schutzleiter PE.
In einem Drehstromnetz
ehstromnetz mit der
d Bezeichnung 400 V 3/N ~ 50 Hz, das in Europa
Euro am
weitesten verbreitet ist, verhalten
rhalten sich die Spannungen wie folgt:
Zwischen den Leitern L1-L2,
L2, L2-L3
L2
und L3-L1 herrschen jeweils 400 V, zwischen
zwisch den Leitern
L1-N, L2-N sowie L3-N
N jeweils 230 V (siehe Abbildung,
Abb
Effektivwerte!!).
Wechselstrom
Der Wechselstrom
hselstrom (oder Einphasenstrom) ist eine Phase des Drehstromnetzes mit dem
zugehörigen Neutralleiter N. Welche der drei Phasen als Wechselstromphase
selstromphase benutzt wird,
ist ohne Bedeutung. In der Abbildung sieht man, dass bei Vorhandensein
andensein eines
Drehstromnetzes mit Neutralleiter N undeiner Spannung von 400 V auchgleichzeitig ein
Wechselstromnetzvon 230 V zur Verfügung steht.
Aktoren_1314_v14
Seite 8 /33
2 Gleichstrommaschinen
Gleichstrommaschine
(dc motor, dc servo)
Überblick
erblick über die verschiedenen Typen
T
von elektrischen Maschinen:
Der Leistungsbereich von Gleichstrommaschinen erstreckt sich
sich von 0,5W bei Kleinantrieben
bis 10MW bei Förderantriebe und Walzwerkantrieben. Aufgrund des guten Regelverhaltens
werden Gleichstrommaschinen
maschinen häufig als StellStell und Positionierantrieb eingesetzt.
Unter einer Gleichstrommaschine versteht man einen Elektromotor, der mit Gleichstrom
betrieben wird. Zu den Vorteilen der Gleichstrommaschinen gehören gutes Anlaufverhalten
und gute Regelbarkeit.
Aktoren_1314_v14
Seite 9 /33
Gleichstrommaschinen spielen daher eine große Rolle als Servomotoren bei mittlerer
Leistung (bis einige kW). Weiters werden weniger exakt geregelte Gleichstrommotoren für
Förderanlagen
nlagen mit Leistungen bis zu 10MW
10
verwendet.
Servomotoren sind Motoren, deren Drehzahl innerhalb kurzer Zeit
Zeit und sehr schnell verändert
werden kann (z.B. in 0,2–1ss von 0 auf
a 100km/h).
2.1 Prinzip der Gleichstrommaschine
2.1.1 Aufbau und Wirkungsweise
Sie besteht aus einem unbeweglichen Teil, dem Stator,, und einem drehbar gelagerten Teil,
dem Rotor (Anker,, aufgrund seiner
seine Optik).
). Die meisten Gleichstrommotoren sind als
Innenläufer ausgeführt: der Rotor ist der innere Teil, der Stator der äußere. Beim
Außenläufer ist es umgekehrt. Bei konventionellen Gleichstrommaschinen besteht der Stator
aus einem Elektromagneten oder bei
bei kleineren Maschinen einem Permanentmagneten. Der
Rotor wird bei konventionellen Maschinen Anker genannt. Eine oder mehrere Spulen auf
dem Rotor werden in einem magnetischen Statorfeld so platziert, dass ein Drehimpuls
ausgelöst wird. Die Wicklung des Rotors
Rot
wird über den Kommutator angeschlossen. Die
Kontakte (Bürsten) des Kommutators
Joch
Erregerspulen
sind so aufgebaut, dass sie während der
Drehung ständig die Polung der
Polschuh
S
Ankerwicklung wechseln. Am
Spulen im Anker
Anker (Rotor)
Kommutator wird der Strom über
Bürstenkontakte auf Lamellen
Bürsten am Kommutator
aufgebracht, die
e mit der Ankerwicklung
Neutrale Zone
fix
verbunden
sind.
Diese Bürsten nützen
N
sich mit der Zeit natürlich ab. Sie sind
aus einem Material gefertigt, welches gut
elektrisch leitet, sich im Betrieb leicht
abreibt und sich somit selber "schmiert"
(meistens enthalten sie Graphit
raphit u. Kupferstaub). Außerdem wird durch dieses Prinzip die
maximale Spannung, die an den Anker gelegt werden kann, begrenzt.
Das allgemeine Motorverhalten wird durch die Erzeugung und Feldstärke des Statorfeldes
und die Eigenschaften der Rotorwicklung bestimmt.
2.1.2 Rückwirkung der Ankerspule
Die Ankerwicklung muss von Strom durchflossen werden, damit das Motorprinzip wirksam
werden kann. Sie bildet aber natürlich auch eine Spule, die ein Magnetfeld erzeugt. Dieses
überlagert sich dem Erregerfeld, das dadurch unsymmetrisch verzerrt wird. Die neutrale
Zone wird dadurch um einen bestimmten Winkel zur horizontalen Achse gedreht.
Um diesen Effekt zu kompensieren, werden zusätzliche Spulen, sogenannte „Wendepole“
eingeführt, die die neutrale Zone wieder in ihre
ihre Ausgangslage zurückschieben.
Um die Leistung des Motors zu erhöhen, werden mehrere Erreger–Ankerspulen
Erreger Ankerspulen–Paare
eingeführt, die sogenannten „Pole“. Sie werden regelmäßig auf den Kreisumfang aufgeteilt,
am Wirkungsprinzip ändert sich dadurch nichts.
Aktoren_1314_v14
Seite 10 /33
2.1.3 Prinzip
p der Kommutierung (Stromwendung)
2.2 Betriebsverhalten der Gleichstrommaschine
Das Betriebsverhalten hängt wesentlich von der Art und Weise ab, wie die einzelnen Spulen
der Maschine,, im speziellen die Erregerwicklung, miteinander verschaltet sind.
2.2.1 Schaltungsarten
Man unterscheidet die Arten Fremderregung, Reihenschluss,
Reihenschlu
Nebenschluss
ss und
Doppelschluss (Compound–Betrieb).
Betrieb).
UA
IA
UE
A1
F2
F1
M
IE
A2
Fremderregter Motor:
Für Erreger- und Ankerspulen werden getrennte Speisespannungen
verwendet. Die Stärke beider Felder kann daher
dah getrennt geregelt
werden.
Werden Permanentmagnete für das Erregerfeld verwendet, entspricht
dies einer fremderregten Maschine mit konstantem UE.
B2
B1
U
IA
A1
E1
E2
M
A2
Nebenschlussmotor:
Erreger- und Ankerspulen werden mit derselben Speisespannung
parallel geschaltet betrieben.
eben. Bei konstanter Spannung U bleibt auch
der Erregerstrom IE konstant, der Ankerstrom IA kann allerdings
lastabhängig variieren.
IE
B2
B1
Aktoren_1314_v14
Seite 11 /33
Reihenschlussmotor:
Hier sind Erreger- und Ankerspule in Serie geschaltet. Damit führt eine
Erhöhung des Ankerstroms immer auch gleichzeitig zu einer
Verstärkung des Erregerfeldes, da ErregerErreger und Ankerstrom natürlich
gleich groß sind.
U
I
A1
D2
D1
M
I
A2
B2
B1
Compoundmotor:
Der Compoundmotor verbindet die Eigenschaften von NebenNeben und
Reihenschlussmotor. Je nach Art und Größe der Wicklungen D und F
kann ein nahezu beliebiges Betriebsverhalten erreicht werden.
UA
UE
IA
A1
F2
F1
D2
D1
M
A2
IE
IA
B2
B1
Im Wesentlichen kann man zwischen zwei grundlegenden Betriebsverhalten unterscheiden:
Nebenschlussbetrieb und Reihenschlussbetrieb.
Nebenschlussmaschinen besitzen eine relativ hochohmige
ge Erregerwicklung. Die
Erregerspannung kann entweder direkt aus der Ankerspannungsquelle
Ankerspannungsquelle bezogen werden
(Nebenschluss-Schaltung)
Schaltung) oder aus einer separaten Spannungsquelle (fremderregt).
Die für drehzahlgesteuerte Antriebe mit Abstand wichtigste Schaltungsvariante
variante ist die der
fremderregten Maschine, da sich hier das Erregerfeld und die Ankerspannung getrennt
einstellen lassen.
Reihenschlussmaschinen haben eine niederohmige
niederohmige Erregerwicklung, die für die
Serienschaltung
ltung mit dem Ankerkreis dimensioniert
dimensio
ist. Die
e Kennlinien einer
Reihenschlussmaschine unterscheiden sich erheblich von den Kennlinien einer
fremderregten Maschine.
2.2.2 Reihenschlussmaschinen
Bei ihm sind Erregerwicklung und Ankerwicklung in Reihe geschaltet. Die Erregerwicklung
muss daher im Gegensatz zum
um Nebenschlussmotor niederohmig sein. Bei einer Speisung
mit Wechselspannung wechseln sowohl Erregerfeld als auch der Ankerstrom ihre Richtung
nach jeder Halbwelle, so dass der Motor auch an Wechselspannung verwendbar ist
(Universalmotor).
Bei geringer Drehzahl
ehzahl ist auch die Gegeninduktionsspannung der Ankerwicklung gering.
Daher fließt ein sehr großer Strom durch den Anker und damit wegen der Reihenschaltung
auch durch die Erregerwicklung. Als Folge kann von der Maschine im Stillstand und bei
geringer Drehzahl
zahl ein sehr großes Drehmoment aufgebracht werden. Da die
Gegeninduktionsspannung im Stromkreis mit der Drehzahl ansteigt, sinkt der Strom durch
diesen. Das Erregerfeld wird dadurch im Vergleich zum Stillstand geschwächt und damit
Aktoren_1314_v14
Seite 12 /33
auch das Drehmoment der Maschine (weiches
(
Drehzahlverhalten). Bei
ei Lastminderung steigt
die Drehzahl stark an, was zum Durchgehen (Zerstörung) der Maschine führen kann.
Universalmotor oder Allstrommotor treiben viele Haushaltsmaschinen, wie Staubsauger,
Küchenmaschinen, Bohrmaschinen und andere Elektro-Handgeräte,
Elektro
an.
Die Drehzahlsteuerung erfolgt durch Verminderung der Speisespannung oder durch
Vergrößerung des Ankerkreiswiderstandes.
Ankerkreiswiderstandes
2.2.3 Nebenschlussmaschine
Bei der Nebenschlussmaschine sind ErregerErreger und Ankerwicklung parallelgeschaltet
lelgeschaltet. Bei
Belastung verringert sich die Drehzahl linear.Die Leerlaufdrehzahl ist proportional zur
Klemmenspannung,
mmenspannung, negative Spannung bedeutet eine negative Drehzahl::
Steht keine einstellbare, variable Ankerspannungsquelle
Ankerspannungsquelle zur Verfügung, dann kann die
Drehzahl auch durch einen z.B. in Stufen einstellbaren
einstellbaren Vorwiderstand im Ankerkreis
beeinflusst werden. Neben der Drehzahleinstellung ist die wichtigste Funktion des
Vorwiderstands die Begrenzung des Motorstroms beim Einschalten und beim Abbremsen
zum Stillstand.
tillstand. Ohne Vorwiderstand würden sich aufgrund
aufgrund der im Stillstand fehlenden
Gegenspannung (induzierten Spannung) unzulässig hohe Anlaufströme ergeben.Große
ergeben.
Maschinen müssen daher mit geringerer Spannung angefahren werden.
Aktoren_1314_v14
Seite 13 /33
3 Wechselstrommotor Allgemeines
Allgemeines
Der Wechselstrommotor basiert auf demselben Grundkonzept wie der Gleichstrommotor.
Ständer und Läufer bestehen aus koaxialen ferromagnetischen Zylindern, in denen jeweils
eine Spule untergebracht ist. Speist man eine der beiden Windungen mit Wechselstrom,
Wechselstr
so
erhält man die Grundform eines Drehstrommotors, der als SynchronSynchron und Asynchronmotor
ausgeführt sein kann.
3.1 Entstehung des Drehfeldes
i
90°
180°
iL1
270°
i L2
360°
iL3
ωt
Im einfachsten Fall einer einpoligen Maschine besteht die Ständerspule aus drei
voneinander unabhängigen Wicklungen, die mit den drei Leitern eines Drehstromnetzes
verbunden werden. Durch die Phasenverschiebung zwischen den drei Leiterströmen des
Drehstromnetzes entsteht ein umlaufendes Drehfeld im Ständer. Die drei Spulen werden
normgerecht mit U, V und W bezeichnet.
bezeichnet. Ein positiver Strom fließt bei X1 in die Blattebene
hinein und bei X2 aus der Blattebene heraus. Betrachtet man die Ströme in den Spulen bei
90º, 180º, 270º und 360º, ergibt sich folgendes Bild:
Bei 90º hat der Leiterstrom I1 sein positives Maximum
imum erreicht. Er fließt
daher bei U1 in die Blattebene und bei U2 wieder heraus. Die Ströme I2
und I3 sind negativ, sie fließen also bei V2 bzw. W2 in die Blattebene und
bei V1 bzw. W1 aus der Blattebene. Daraus ergibt sich die im Bild
gezeigte Anordnung mit dem ebenfalls eingezeichneten resultierenden
magnetischen Feld.
W1
N
V2
⊗
⊗
U2
⊗
⊗
⊗ ⊗
V1
S
ω
W2
W1
ω
V2
S
U2
N
U1
⊗ ⊗ ⊗
⊗
Bei 180º ist der Strom I1 null, durch die Spule U fließt kein Strom. I2 ist
positiv und I3 ist negativ. Das resultierende Feld hat sich um 90º gegen
den Uhrzeigersinn weitergedreht.
V1
W2
W1
ω
V2
S
⊗
⊗
U1
⊗
N
⊗
⊗
U2
⊗
Bei 270º sind wieder alle Ströme ungleich null. I1 ist negativ, I2 und I3 sind
positiv. Es ergibt sich eine weitere Drehung um 90º.
V1
W2
Aktoren_1314_v14
Seite 14 /33
W1
V2
⊗ ⊗ ⊗
N
⊗
U2
U1
S
Bei 360º ist I1 wieder 0, I2 ist negativ und I3 ist positiv. Insgesamt sieht
man, dass durch die Beschaltung der Spulen
Spulen mit den Leitern des
Drehstromnetzes ein Drehfeld entsteht, das mit der
Winkelgeschwindigkeit ω des Netzes gegen den Uhrzeigersinn rotiert.
ω
V1
W2
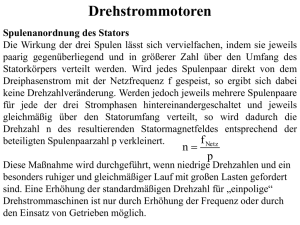
Wenn die Wicklung des Ständers aus mehreren Spulen pro Phase besteht (mehrere
„Pole“),wird
ird die Umlaufgeschwindigkeit des Drehfeldes verlangsamt. Ist p die Polanzahl des
Ständers und f die Frequenz des Netzes, wird die Frequenz fd des Drehfeldes zu:
fd =
f
p
4 Asynchronmaschine
Sie gehört zur Gruppe der Induktionsmotoren. Die beiden Drehmoment bildenden Größen –
Erregerfeld und Ankerstrom werden nicht wie bei der Gleichstrommaschine in voneinander
unabhängigen Stromkreisen gebildet, sondern sind wie bei einem Transformator nach dem
Induktionsgesetz
sgesetz miteinander verkettet.
Die Asynchronmaschine besteht aus einem Stator (genannt „Ständer“) und einem Rotor
(genannt „Läufer“). Im Ständer wird das Drehfeld gebildet.
Der Ständer enthält die Spulen, die das Drehfeld erzeugen. Der Läufer kann auf zwei
verschiedene Arten ausgeführt sein. Wenn er ebenfalls Spulen enthält, werden die
Anschlüsse der Spulen über Bürsten (ähnlich den Kommutatorbürsten der
Gleichstrommaschine) nach außen geführt. Man spricht von einem „Schleifringläufer
„Schleifringläufer“
(Schleifringläufer tragen
agen eine isolierte Wicklung).Schleifringläufer
Wicklung Schleifringläufer wurden früher für Motoren
mit Drehzahlregelung verwendet.
Der Läufer kann jedoch auch einfach aus Metallstäben bestehen, die an den Rändern mit
Metallringen kurzgeschlossen werden. Die Metallstäbe bilden dann
dann die Spule, man spricht
von einem „Kurzschlussläufer
Kurzschlussläufer“.
“. Beim Kurzschlussläufer sind keine Schleifringe nötig, er ist
sehr einfach zu konstruieren und praktisch verschleißfrei (Käfigläufer
Käfigläufer weisen unisolierte
Leiter in den Rotornuten auf). Drehzahlregelung nur durch Frequenzumrichter möglich (sind
aber häufiger).
Aktoren_1314_v14
Seite 15 /33
Das Drehfeld induziert jetzt natürlich auch im Läufer eine Spannung U2, die einen Rotorstrom
I2 fließen lässt. Allerdings kann eine Spannung nur induziert werden, wenn der Läufer nicht
mit der gleichen
ichen Geschwindigkeit rotiert wie das Drehfeld. Der Unterschied in der Drehzahl
von Drehfeld und Läufer ist ein sehr wichtiger Betriebsparameter der Asynchronmaschine, er
wird als Schlupf s bezeichnet. Mit nd der Drehzahl des Drehfeldes und n der Drehzahl des
Läufers wird der Schlupf definiert als:
s=
nd − n
nd
n = nd ⋅ (1 − s )
Aus der Tatsache, dass Drehfeld und Läufer asynchron zu einander sein müssen, damit die
Maschine funktionieren kann, wurde der Name
Name Asynchronmaschine abgeleitet. Der Rotor
dreht mit der Frequenz f2 = s ⋅f
⋅ 1.
Vor- und Nachteile von Schleifringläufer:
Schleifringläufer
4.1 Ständerschaltungen
Die Wicklungen im Ständer können prinzipiell als Stern oder als Dreieck geschaltet werden.
Legt man die konstante Spannung UN an die Wicklungen (UL = UN) und nimmt man
symmetrische Belastung an (alle Wicklungen haben Impedanz Z), gelten die schon
bekannten Gleichungen im Drehstromsystem.
Aktoren_1314_v14
Seite 16 /33
U1
V1
W1
U1
V1
W1
U2
V2
W2
U2
V2
W2
UL
UL
V1
IL
U2
IL
V1
V2
U St
V2
U1
U St
U2 W2
U1
W1
I St
I St
W2
W1
UN
U St
= 3 → U N = 3 ⋅ I StY ⋅ Z
Z
Z
U St U N
=
=
→ U N = I St∆ ⋅ Z
Z
Z
⋅ Z = 3 ⋅ I StY ⋅ Z
I StY =
I St∆
I St∆
I St∆ = 3 ⋅ I StY
Außerdem gilt I StY = I LY und I St ∆ = I N ∆ / 3 . In die obige Gleichung eingesetzt ergibt das:
I L∆ = 3 ⋅ I LY
Legt man die gleiche Nennspannung an die Leiter des Drehstromnetzes, so ist der
Leiterstrom in Dreieckschaltung dreimal so groß wie in Sternschaltung. Daraus kann
abgeleitet werden, dass auch das resultierende Drehmoment in Dreieckschaltung
Dreieckschaltung dreimal
größer ist als in Sternschaltung.
M ∆ = 3⋅ MY
Sternschaltung
Spannung im Netz der
Wicklung
Strom im Netz der
Wicklung
UL
Dreieckschaltung
UL
U StΥ =
UL
I LΥ =
I L∆
3
3
I StΥ = I LΥ
U St∆ = U L
I L∆ = 3 ⋅ I LΥ
I St∆ =
I L∆
3
Es ist üblich, Motoren zum Anlaufen in Sternschaltung zu betreiben, weil dabei weniger
Strom aufgewendet werden muss und weniger Drehmoment erzeugt wird. Ist der Motor
angelaufen, wird auf Dreieck umgeschaltet, um das volle Drehmoment erreichen zu können.
Aktoren_1314_v14
Seite 17 /33
4.2 Drehzahlregelung
4.2.1 Polumschaltbare Asynchronmaschinen
Die Frequenz des Drehfeldes hängt von der Polzahl der Ständerwicklung ab (fd = f0 / p).
Daher kann die Drehzahl des Läufers verändert werden, indem die Anzahl der Pole
verändert wird. Mit dieser Methode kann die Drehzahl jedoch nur in ganzzahligen Vielfachen
verändert werden. Sie ist daher nur für einfache Fälle geeignet.
4.2.2 Frequenzumrichter
Will man die Drehzahl einer Asynchronmaschine
Asynchronmaschine kontinuierlich verstellen, muss man die
Drehfeldfrequenz ebenfalls kontinuierlich ändern. Dazu benötigt man sog.
Frequenzumrichter (FU). Sie bestehen aus einem Gleichrichter mit nachfolgenden
Glättungskondensatoren. Die so gewonnene Gleichspannung wird dann mit einem
Wechselrichter in ein pulsweiten-moduliertes
pulsweiten moduliertes Signal, welches einen Sinus beliebiger
Frequenz nachbildet umgewandelt.
Der Wechselrichter besteht aus einem Schalterpaar pro Phase. Der Ausgang kann
entweder auf die Gleichspannung oder auf
auf Masse geschaltet werden. Da die Schaltzeiten
moderner Leistungshalbleiter sehr klein sind, können Impulse von praktisch beliebiger Dauer
erzeugt werden.
Werden die Impulse durch eine Spule geleitet, entsteht ein geglätteter Spannungsverlauf.
Durch eine Aneinanderreihung verschieden langer Impulse kann ein praktisch beliebiger
Spannungsverlauf erzielt werden.
Aktoren_1314_v14
Seite 18 /33
T1
5 Synchronmaschine
Synchronmaschinen werden überwiegend in Kraftwerken zur
Erzeugung elektrischer Energie verwendet (bis 1700 MVA).
Als Motoren werden sie nur für größte Lasten (bis 30 MW)
sowie als Servos (brushless dc, einige kW – siehe
Gleichstrommaschine) eingesetzt.
S2
N
⊗
⊗
R1
⊗
⊗
R2
⊗ ⊗
S
Prinzip
Der Ständer des Synchronmotors ist wie der Ständer des Asynchronmotors aufgebaut. Der
Läufer ist oft als Schenkelpolläufer ausgebildet. Auf den Läufer ist wie bei der
Gleichstrommaschine eine Spule aufgewickelt. Diese Läuferspule wird von einem
Erregerstrom durchflossen. Die Kraftwirkung durch das Motorprinzip bewirkt, dass sich der
Läufer
ufer mit der gleichen Drehzahl dreht wie das Drehfeld. Da kein Schlupf vorhanden ist, wird
im Läufer auch keine Spannung induziert.
Erregerstrom
Damit der Synchronmotor arbeiten kann, muss ein Gleichstrom durch den Läufer fließen. Der
Leistungsbedarf für die
ie Erregerwicklung liegt bei kleinen Maschinen bei etwa 3 bis 5 %, bei
sehr großen Maschinen bei etwa 0,5 % der gesamten Scheinleistung. Bei großen
Generatoren kann der Erregerstrom über 10 kA liegen. Diese Erregung kann auf mehrere
Arten zur erzeugt werden.
n. Zum einem kann ein Strom mittels Schleifringe eingekoppelt
werden, wobei die Stromerzeugung z.B. durch einen eigenen Generator oder einen
netzbetriebenen Thyristorgleichrichter erfolgen kann und zum anderen kann das Läuferfeld
durch Permanentmagnete gebildet
gebildet werden(synchroner Servomotor, brushless dc).
5.1 Polradwinkel und Momentenkennlinie
5.1.1 Motorbetrieb
Bei einem Synchronmotor drehen sich Läufer und Drehfeld gleich schnell. Im unbelasteten
Zustand befinden sich die Pole des Läufers immer direkt unter oder über
über den Polen des
Drehfeldes. Wird der Motor jedoch durch ein Moment an der Welle belastet, bleibt der Läufer
etwas hinter dem Drehfeld zurück.
Läuferachse
stw
La
ϑ
el
ink
Drehfeldachse
Die Drehzahl bleibt jedoch gleich groß, es entsteht kein Schlupf. Der
Winkel zwischen dem Läufer und dem Drehfeld,
hfeld, der vom Lastmoment
abhängt, wird als Lastwinkel oder Polradwinkel ϑ bezeichnet.
Der Polradwinkel ist umso größer, je größer das Lastmoment ist.
Anders ausgedrückt bedeutet das, dass das Moment, das der
Synchronmotor erzeugt, umso größer ist, je mehr der Läufer hinter
dem Drehfeld zurückbleibt.
N
⊗
⊗
⊗
⊗
⊗ ⊗
S
Aktoren_1314_v14
Seite 19 /33
5.1.2 Generatorbetrieb
La st w in
kel ϑ
Läuferachse
Drehfeldachse
N
⊗
⊗
⊗
⊗
⊗ ⊗
Im Generatorbetrieb tritt der gleiche Effekt auf. Wird der Generator
belastet (Laststrom in der Ständerwicklung), muss das treibende
Moment vergrößert werden. Dadurch wird der Läufer kurzzeitig
beschleunigt, und es entsteht ein Polradwinkel mit entgegengesetztem
Vorzeichen.
Auch hier bleiben die Drehzahlen von Läufer und Drehfeld gleich.
S
5.1.3 Momentenkennlinie
Aus dem vorher Gesagten ergibt sich der Verlauf
der Momentenkennlinie der Synchronmaschine.
Syn
Ist
der Polradwinkel 0, ist das resultierende
Drehmoment ebenfalls 0. Mit steigendem
Polradwinkel steigt auch das Moment an.
Bei einem bestimmten Polradwinkel erreicht die
Maschine ihr Kippmoment MK. Wird der
Polradwinkel weiter vergrößert, fällt die Maschine
außer Tritt. Sie läuft dann asynchron weiter oder
bleibt stehen. Dieser Betriebsfall muss natürlich
unbedingt verhindert werden.
Kippmoment MK
M
Motor
–90°
–60°
–30°
30°
60°
90°
Polradwinkel ϑ
Generator
MK
5.1.4 Drehzahlregelung
Für die Drehzahlregelung gilt im Prinzip das gleiche wie für die Asynchronmaschine.
Aktoren_1314_v14
Seite 20 /33
6 Begriff Servomotor
Als Servomotor werden elektrische Motorenverschiedener
Motoren
Bauart bezeichnet, die mit einem
Servoregler (der aus einem Servoverstärker und meisten falls weiteren RegelkreisRegelkreis
Übertragungsgliedern besteht) einen Servoantrieb bilden. Die Servomotoren werden in
einem geschlossenen Regelkreis betrieben. Der Betrieb kann momenten-,, geschwindigkeitsgeschwindigkeits
oder positionsgeregelt sein.
Der Begriff "Servomotor" kommt von seinem früheren Einsatzgebiet als Hilfsantrieb (servus
lat. Sklave) und beschreibt im Gegensatz zu Motorbezeichnungen wie DC-Motor oder
Induktionsmotor kein physikalisches Wirkungsprinzip. Ein Servoantrieb kann einen
Gleichstrommotor, einen Asynchronmotor oder einen Synchronmotor,, also eigentlich jede Art
Elektromotor enthalten. Die Unterscheidung zu anderen Motoren liegt also nicht im Motor
selbst, sondern allein in ihrer Ansteuerung, die in einem geschlossenen Regelkreis
betrieben wird.
7 Anwendungen
7.1 Windenergiegenerator
energiegenerator
Um den Wind mit seiner schwankenden Geschwindigkeit stets die maximale Leistung
entnehmen zu können, muss man die Rotordrehzahl der Windenergieanlage (WEA) an die
Windgeschwindigkeit anpassen können.
könn
Das heißt, man muss ein drehzahlvariables
Generatorprinzip wählen. Bei Windenergieanlagen großer Leistung konkurrieren auf diesem
Gebiet die umrichtergespeiste Synchronmaschine und die doppelt-gespeiste
doppelt gespeiste
Asynchronmaschine (DGAM).
Aktoren_1314_v14
Seite 21 /33
Bei der Synchronmaschine ist bekanntlich die Ständerfrequenz fN fest mit der Läuferdrehzahl
nS über die Polpaarzahl p gekoppelt:
fN = p nS
Der zur Entkopplung von variabler Drehfrequenz nsund fester Netzfrequenz erforderliche
Frequenzumrichter liegt zwischen Ständerwicklung
Ständerwicklung und Netz. Über ihn fließt die gesamte
Generatorleistung (Nachteil).
Beim Generatorkonzept mit der DGAM ist die Asynchronmaschine ständerseitig direkt mit
dem Netz verbunden. Der zur Entkopplung von variabler Drehfrequenz und fester NetzNetz
frequenz
enz erforderliche Frequenzumrichter liegt im Läuferkreis.
Aufgrund der additiven Überlagerung von StänderStänder und Läuferfeld wird die Drehzahl n direkt
durch die Frequenz der Läuferströme beeinflusst (Gegeninduktion).
Dabei bezeichnet f1die Netz- bzw. Ständerfrequenz, f2die Frequenz der Läuferströme und p
die Polpaarzahl.
Durch das Einprägen einer gewünschten Läuferstromfrequenz f2kann die Drehzahl n
eingestellt werden. Benötigt man nur einen begrenzten Drehzahlstellbereich, wie
beispielsweise bei Windenergieanlagen, kann der Umrichter wesentlich kleiner dimensioniert
dimensionie
werden, weil nur die Ständerwirkleistung über den Umrichter geführt werden muss.
muss
7.2 Motoren für Elektroautos
Sie sollen einen hohen Wirkungsgrad aufweisen und eine hohe
hoh massen- und
volumenbezogene Leistung erbringen. Zusätzlich sollen die Elektromotoren möglichst
unaufwendig und kostengünstig in der Herstellung sein.
Abb. 26
Aktoren_1314_v14
Seite 22 /33
Durchsetzen werden sich nach derzeitigem Stand der Technik zwei Elektromotor-Typen.
Elektromotor
In
kleineren
n Fahrzeugen werden so genannte permanent erregte Synchronm
maschinen (PSM),
deren Rotor einen Permanentmagneten enthält und die vergleichsweise leistungsstark sowie
leicht und kompakt
akt sind, verwendet. Die andere Antriebsart sind elektrisch
lektrisch erregte
Synchronmaschinen (ESM),
), deren Rotor Kupferwicklungen enthalten. Dort ist der
Wirkungsgrad höher, jedoch sind sie größer und schwerer. Sie eignen sich eher für wuchtige
Limousinen oder SUVs. Die Drehzahlregelung erfolgt mit Wechselrichtern.
Hybrid erregte Synchronmaschinen
aschinen
Eine weitere
itere Gruppe von Motoren beruht auf dem Prinzip, dass
ss sich ein magnetisierbarer
magnetisier
(aber selbst nicht magnetischer) Körpermit einer
einer ausgeprägten Vorzugsrichtung für den
magnetischen
netischen Fluss in der Richtung des äußeren Feldes ausrichtet (Reluktanzprinzip,
(Reluktan
Abb.28).
Werden das Reluktanzprinzip und die permanente Erregung miteinander kombiniert, so lässt
sich bei sorgfältiger Auslegung
ung das Beste von beidem nutzen (Hybrid).
Magnetische Reluktanz ist das magnetische Pendant zum elektrischen Widerstand. Das
heißt: Der Rotor besitzt in einer Richtung einen möglichst geringen magnetischen
Widerstand und rechtwinklig dazu eine hohe magnetische Reluktanz beziehungsweise eine
gute magnetische
agnetische „Isolation“. Das Drehmoment entsteht dadurch, dass der Rotor versucht,
die magnetisch leitfähige Richtung am Statorfeld auszurichten. Die Höhe des erzeugten
Drehmoments ist direkt proportional zur Ausprägung beziehungsweise zum Verhältnis der
Induktivitäten
duktivitäten der beiden magnetischen Richtungen des Rotors. Dadurch verbessertes
Drehmomentenverhalten.
Bis auf Ausnahmen ist in der Europäischen Union ab 2011 ein Wirkungsgrad >94 % für
Elektromotoren vorgeschrieben. In kommerziellen Elektroautos kommen generell
g
hocheffiziente Elektromotoren zur Anwendung. Da auch die zugehörige Elektronik
Wirkungsgrade um 95 % aufweist und moderne Akkusysteme 90 bis 98 % Energieumsatz
erreichen, sind Elektroantriebe den Antrieben mit Verbrennungsmotoren deutlich überlegen.
überlegen
Der Wirkungsgrad von Benzinmotor beträgt maximal 35 %, der von Dieselmotoren maximal
45 %, da bei einem Verbrennungsmotor ein Großteil der Energie in Wärme umgewandelt
wird.
Akkuleistung - um ohne Nachzutanken etwa 400km weit zu fahren, benötigt man etwa
etw
50kWh Antriebsenergie.
Achtung,, Permanentmagneten werden aus den Werkstoffen der Gruppe ‚seltene Erden‘
gefertigt.
Abb. 27
Treibstoff
mittlerer
Energiedichte
Antriebskomponente Wirkungsgrad des
(kWh/kg)
Antriebs
Gesamtmasse des
Energiespeichers
in kg
für 50 kWh nutzbare
Energie
Bleiakkumulator
0,03
Elektromotor
mit Nutzbremse
95 %
bis zu 97 %
1350
Lithium-IonenAkkumulator
0,13
Elektromotor
mit Nutzbremse
95 %
bis zu 97 %
311
Dieselkraftstoff
11,8
Dieselmotor
mit Getriebe
25 %
23,5 %
18 (+5 Tankbehälter)
Superbenzin
11,1
Ottomotor
mit Getriebe
15 %
14 %
29 (+5 Tankbehälter)
Aktoren_1314_v14
Seite 23 /33
8 Reluktanzaktoren
Der Begriff Reluktanz stammt von der Kraft, die einen drehbar gelagerten,, magnetisierbarer
Eisenstab in einem Magnetfeld in Richtung des geringsten magnetischen Widerstands
(Reluktanz,, parallel zu den Feldlinien)
Feldlinien bewegt.
Abb. 28
8.1 Schrittmotoren Allgemein
8.1.1 Prinzipieller Aufbau und Wirkungsweise von Schrittmotoren
Schrittmoto
Elektromagnetische Schrittmotoren sind spezielle Synchronmotoren. Genau wie diese,
bestehen auch Schrittmotoren aus einem feststehenden Stator und einem drehenden Rotor/
bewegendem Läufer. Sie besitzen meist ausgeprägte Pole im Stator, deren Wicklungen
zyklisch bestromt werden. Dadurch entsteht ein nahezu sprungförmig umlaufendes
Magnetfeld, dem der Rotor schrittweise folgt. Der Rotor dreht sich immer so, dass sich der
größtmögliche magnetische Fluss ausbildet.
Die Drehbewegung entsteht also durch gezieltes Ein- und Ausschalten einzelner
Wicklungen. So lassen sich auf einfachste Weise Drehsinn und Drehzahl des Motors
steuern. Um die Position des Rotors zu bestimmen, genügt es, ausgehend von einer
Ausgangslage die Schritte mit bzw. gegen den Uhrzeigersinn
Uhrzeigersinn zu zählen und mit dem
Schrittwinkel zu multiplizieren (eher ungenau, wegen möglicher Schrittfehler).
Schrittfehler)
Aktoren_1314_v14
Seite 24 /33
8.1.2 Eigenschaften von Schrittmotoren:
Vorteile
•
•
•
•
Nachteile
große mechanische Robustheit
geringe Wartung bei hoher Lebensdauer
günstiges Kosten-// Leistungsverhältnis
des Systems Elektronik-Schrittmotor
Schrittmotor
Schleifringe / Kommutator entfallen
•
•
Außertrittfallen bei zu hoher Belastung,
damit verbundene Schrittfehler
Neigung zu mechanischen
Schwingungen
Da der Rotor keine Wicklungen trägt, brauchen Schrittmotoren auch keine Kommutatoren
oder Schleifringe, die die Lebensdauer negativ beeinflussen würden. Schrittmotoren sind
deshalb sehr robust und zeichnen sich durch eine hohe Lebensdauer und geringe Wartung
Wartu
aus.
Eingangssignale: Takt und Richtung (CW, CCW)
IV - Impulsverteiler (Ansteuerlogik)
LV - Leistungsverstärker (Pulssteller)
SM – Schrittmotor
CW … Clock Wise, CCW … Counter Clock Wise
Schrittmotoren dienen fast ausschließlich
aus
zur Positionierung.
8.1.3 Ansteuertechniken:
steuertechniken:
Man unterscheidet zwei unterschiedliche Ansteuertechniken: Unipolar- und Bipolarbetrieb.
Bipolarbetrieb
Beim Bipolarbetrieb werden die Spulen umgepolt, während im Unipolarbetrieb am
Mittelabgriff der Spule die Versorgungsspannung fest anliegt, und abwechselnd
abwech
immer ein
Spulenende nach Masse gezogen wird. Wegen des relativ hohen Schaltungsaufwandes bei
bipolarer Beschaltung war die unipolare Schaltung lange sehr beliebt, obwohl sie wegen der
kleineren Spulenströme ein kleineres Drehmoment und kleinere Drehzahlen
Drehzahlen erzeugt. Mit
dem Aufkommen preiswerter, integrierter Schaltungen begann sich die bipolare
Ansteuertechnik mehr und mehr durchzusetzen.
Bipolar:
Unipolar:
höherer Aufwand, höheres Drehmoment
geringeres Drehmoment
Abb.29
Aktoren_1314_v14
Seite 25 /33
Bei Unipolar Betrieb sind nur Lowside Schalter (LS, gegen Masse), beim Bipolar LS und HS
(Highside) Schalter notwendig (H-Brücke).
Schrittmotoren
tmotoren besitzen immer 4, 6 oder 8 Anschlüsse, welche wie folgt ausgeführt sind:
Abb. 30
Die Bestimmung kann mit einem Ohmmeter (DMM) erfolgen!
8.1.4 Betriebsarten von Schrittmotoren
Je nach Bestromung der Wicklungen des Motors kann der Schrittmotor im
o
o
o
o
Vollschrittbetrieb
(Wellenschritt,, wavedrive – nur eine Spule bestromt)
Halbschrittbetrieb
Mikroschrittbetrieb
angesteuert werden.
Abb. 31
Animation:
http://de.nanotec.com/schrittmotor_animation.html
Aktoren_1314_v14
Seite 26 /33
Durch Änderung
g der Stromrichtung in der Spule ändert sich das Magnetfeld (N-S
(N Pol).
Dabei ergeben sich spezifische Kraft-Weg-/
Kraft
Drehmoment- Drehwinkel-Kennlinien.
Kennlinien. Durch
elektronische Schrittteilung kann die Größe der mechanischen Schritte eines Schrittmotors
gezielt verkleinert werden (Angaben in Grad – 7,5°, 2,5°, 1,8°…).
Abb.32
Obere Reihe 'Wavedrive', untere Reihe 'Vollschritt'
Positionen 1-8 'Halbschritt'
Dies kann durch eine Änderung der je Arbeitstakt bestromten Statorwicklungen
(Halbschrittbetrieb) oder durch Änderung der Amplituden der Wicklungsströme
(Mikroschrittbetrieb) erreicht werden (z.b. durch Sinus-/Cosinusförmige
/Cosinusförmige Ströme - Simulation).
8.2 Reluktanzschrittmotor
Beim Reluktanzschrittmotor besteht der Rotor aus einem gezahnten Weicheisenläufer. Der
Reluktanzschrittmotor erfreute sich wegen seines günstigen Preises lange Zeit großer
Beliebtheit. Nachteilig ist hingegen das vergleichsweise geringere Drehmoment. Da der
de
Weicheisenläufer keine eigene Erregung besitzt, erzeugt der Reluktanzmotor bei
abgeschaltetem Statorstrom auch kein Selbsthaltemoment (da kein Permanentmagnet).
Prinzip der Schritterzeugung eines Reluktanzschrittmotors:
Durch Bestromung der einzelnen Wicklungen (Stränge) des Reluktanzschrittmotors setzt
sich der Rotor in Bewegung.
Bestromung
des Stranges:
AA´
BB´
CC´
DD´
AA´- DD´
Schrittfolge
1. Schritt
2. Schritt
3. Schritt
4. Schritt
Aktoren_1314_v14
Seite 27 /33
Abb. 33
Im Interesse einer hohen Positioniergenauigkeit werden möglichst kleine konstruktive
Schrittwinkel angestrebt (bei immer gleichen Spulenanzahl von 4, aber feinerer Zahnung).
Zahnung)
Abb.34
1.
Schritt
2.
Schritt
3.
Schritt
8.3 Permanentmagnet-Schrittmotor
Permanentmagnet
Beim Permanentmagnetschrittmotor besteht der Stator aus Weicheisen und der Rotor aus
Dauermagneten, die abwechselnd einen NordNord und einen Südpol aufweisen. Mit dem StatorStator
Magnetfeld richtet man den dauermagnetischen Rotor so aus, dass eine Drehbewegung
entsteht.
Beim Permanentmagnetschrittmotor ist die Anzahl der Pole (und damit die Auflösung)
begrenzt.
Wegen der relativ hohen Herstellkosten und den relativ großen konstruktiven
konstruktiven Schrittwinkeln
(7,5°)
°) wurde der Wechselpolschrittmotor zunehmend vom Hybridschrittmotor
Hybridschrittmot verdrängt.
8.4 Hybridschrittmotor
Der Hybridschrittmotor verbindet die Vorteile der Permanentmagnetschrittmotoren mit denen
der Reluktanzschrittmotoren.
Aktoren_1314_v14
Seite 28 /33
Bestromung des Polpaares:
AA´
1.Schritt
BB´
2. Schritt
AA´
3. Schritt
BB´
4. Schritt
Abb. 35
8.4.1 Wirkungsweise und Eigenschaften
Der Hybridschrittmotor ist eine Ausführungsform des polarisierten Schrittmotors. Aufgrund
der besonderen Konstruktion des Magnetankers - der Dauermagnet ist axial polarisiert bleibt die Polarität des magnetischen Feldes entlang dem Umfang unverändert. Die
Di
Kraftwirkung auf den Anker wird erzeugt durch die Wechselwirkung der weichmagnetischen,
mit einer Zahnstruktur versehenen Ankerpole mit den verzahnten Polständen. Durch die
Vergrößerung der Zähnezahl kann der konstruktive Schrittwinkel sehr stark verkleinert
verklei
werden und ist praktisch nur durch die Herstellungstechnologie und damit durch die
erreichbaren Fertigungstoleranzen der AnkerpolAnkerpol und Ständerpolzähne begrenzt.
Der Hybridschrittmotor hat sich heute als Standard für hochauflösende Positionierantriebe
durchgesetzt.
Abb. 36
Die gezahnten Rotoren sind um eine halbe Zahnteilung versetzt gegeneinander angebracht.
Durch die Anordnung des Dauermagneten im Rotor bildet die eine Zahnscheibe den Nordpol
und die andere den Südpol des Rotors.
Aktoren_1314_v14
Seite 29 /33
Abb.37
Längsschnitt entlang der Motorachse durch einen Hybridschrittmotor. Der Hybrid
Schrittmotor ist heute der am meisten eingesetzte Motortyp, da er hohe mechanische
Leistungen bei kleinen Schrittwinkeln und kleiner Bauform vereint. Die gebräuchlichsten
Schrittauflösungen
tauflösungen liegen zwischen 50 und 2000 Schritte (7,2°/0,18°) pro Motorumdrehung
ohne elektronische Zusatzmaßnahmen.
8.5 Spezifischen Eigenschaften von Schrittmotoren:
Typ
Konstruktiver
Schrittwinkel
maximale
Betriebsfrequenz
Drehmoment
typspezifische Hinweise
Hinw
Schrittwinkel nur durch techn.
Herstellbarkeit nach unten begrenzt
Reluktanzschrittmotor
15°...0,9°
... kHzBereich
<1 Nm
Zähnezahl des Rotors gerade (aus
magnetischen Gründen)
Strangzahl mindestens 3
kein Selbsthaltemoment
Permanent
magnetschrittmotor
hohe dynamische Stabilität
60°...7,5°
einige kHz
<1 Nm
Selbsthaltemoment/ Rastmoment
hohe dynamische Stabilität
Selbsthaltemoment/ Rastmoment
Hybridschrittmotor
3,6°...0,9°
Hoch
<= 5 Nm
kleinste Schritte realisierbar
Zähnezahl des Rotors ungerade
großes Drehmoment
Aktoren_1314_v14
Seite 30 /33
8.6 Spezielle Bauformen
6.4.1 Bürstenlose Gleichstrom Maschinen(Brushless
Brushless DC Motor)
Motor
Nachteil der konventionellen Gleichstrommaschinen sind die Funken, welche bei den
Bürsten entstehen („Bürstenfeuer“). Das Bürstenfeuer ist die Hauptursache für
hochfrequente Störungen, die der Motor im Betrieb in das Leitungsnetz zurückspeist und die
andere elektrische Verbraucher stören. Dies begrenzt auch die maximale
Drehgeschwindigkeit, da die Bürsten bei hohen Drehzahlen heiß werden und besonders
schnell verschleißen. Weiterhin bewirken hohe Drehzahlen auch höhere InduktionsInduktions
spannungen die bis hin zum umlaufenden Bürstenfeuer führen können (kein Abkommutieren
mehr).
Dies umgeht die bürstenlose Gleichstrommaschine, engl. brushless direct current, BLDC.
Der Rotor besteht hier aus einem Permanentmagneten, der Stator besteht aus mehreren
Magnetspulen, ist also eine Umkehrung des allgemeinen Aufbaus. Meist werden diese
dreiphasig ausgeführt.
Abb. 38
Es gibt drei Arten, wobei der Schrittmotor bereits behandelt wurde:
•
Sensorgesteuerte bürstenlose Gleichstrommaschinen besitzen Lagesensoren, die die
Stellung des Rotors detektieren. Wie bei der bürstenbehafteten Gleichstrommaschine
können so die Phasen in Abhängigkeit von der Lage des Rotors geschaltet werden.
Die Positiondetektion kann mittels magnetischer (Hall-Effekt-Sensoren)
(Hall
Sensoren) oder
optischer Positionssensoren erfolgen (z.B. bei hochwertige Industriemotoren,
Servomotoren).
•
Sensorlose bürstenlose Gleichstrommaschinen benutzen die Gegenspannung zur
Detektion der Rotorposition. Diese Variante heißt im Englischen 'sensorless', da
keine separaten Sensoren benötigt werden.
Da zur Entstehung einer auswertbaren Gegenspannung eine bestimmte
Mindestdrehzahl erforderlich ist müssen sensorlose
sensorlose Motoren als Schrittmotor bis zum
Erreichen dieser Drehzahl blind geschaltet.
Die drei Spulenstränge des Stators werden über eine Brückenschaltung (mit Transistoren,
MOSFET oder IGBT (insulated
insulated-gate bipolar transistor),, bei kleinen Leistungen in einem
Leistungs-IC
IC integriert) kommutiert. Man spricht daher auch von EC-Motoren,
EC Motoren, (elektronisch
kommutiert, engl. electronical commutation). Die Elektronik stellt einen Drehstromregler dar,
wie er ähnlich auch in Frequenzumrichtern verwendet wird. Genau genommen handelt
h
es
sich bei diesen Motoren auf Ebene der Motorklemmen daher um
Aktoren_1314_v14
Seite 31 /33
Synchronmaschinen(staorseitig)
(staorseitig),, die jedoch mittels der Umrichterelektronik mit
Gleichspannung gespeist werden können.
Diese Maschinen sind wegen ihrer zusätzlichen Elektronik vergleichsweise
vergleichsweise teuer. Aufgrund
besserer Wirkungsgrade (durch höhere Leistung bei gleichen Bauvolumen) und geringerem
Verschleiß (Bürsten) verdrängen sie konventionelle, bürstenbehafteten E-Motoren
E Motoren aus immer
mehr Einsatzgebieten. Häufig findet man sie z.B. als Außenläufer
Außenläufer im Computerbereich. Dort
treiben sie Lüfter und werden in den verschiedenen
verschiedenen Laufwerkstypen eingesetzt. Auch die
Kopftrommel in Videorekordern verwendet
ve
dieses Antriebskonzept. Auch im ModellbauModellbau
bereich werden zunehmend bürstenlose Motoren (engl. Brushless
Brushless Motor oder BL Motor) im
Bereich anspruchsvoller Leistungsmodelle eingesetzt.
6.4.2 Linearmotoren
Im Gegensatz zu den verbreiteten rotierenden Maschinen versetzt ein Linearmotor (englisch
Linear Synchronous Motor, LSM) die mit ihm verbundenen Objekte nicht in eine drehende,
sondern in eine geradlinige Bewegung.
Die
ie ursprünglich kreisförmig angeordneten elektrischen Erregerwicklungen (Stator)
(
sind auf
einer ebenen Strecke angeordnet. Der Läufer, der im Drehstrommotor rotiert, wird beim
Linearmotor von dem längs
ngs bewegten Magnetfeld über die Fahrstrecke gezogen. In der
Praxis werden grundsätzlich entweder Asynchronmaschinen (das Magnetfeld ist nicht fest
mit der Bewegung gekoppelt) oder Synchronmaschinen im weiteren Sinne verwendet (was
auch lineare Reluktanzmaschinen
schinen und Linearschrittmotor einschließt). Die Verwendung
kommutierter Gleichstrommaschinen ist zwar möglich, aber eher unüblich.
Abb.39
Oben die Spulen, unten Permanentmagnete (abwechselnd N und S) - die
ie Linearbewegung
tritt zwischen Spulen und Permanentmagneten auf. Die erforderliche Abstandshaltung
zwischen Läufer und Linear-Wicklung
Wicklung kann zum Beispiel mit Rädern, Luftkissen oder durch
elektromagnetisch geregeltes Schweben erfolgen.
Anwendung:
•
•
•
Werkzeugmaschinen,
gmaschinen, sowie bei Positioniersystemen und Handlingsystemen
Bahnantriebe (Transrapid)
Haushalts-Elektro-Kleingeräten
Kleingeräten (Zahnbürsten, …)
Aktoren_1314_v14
Seite 32 /33
9 Versionsverwaltung
Version 1.0: Startversion
Version 1.1: Diverse Erweiterungen
Version 1.2: Spezielle Anwendungen
Version 1.3: Ergänzung Schrittmotoren, Fehler
Version 1.4: Kleine Änderungen und Fehlerbehebung
Aktoren_1314_v14
Seite 33 /33