Magnetismus und magnetische Materialien
Werbung

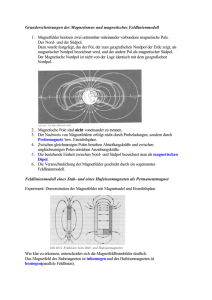
Friedrich-Alexander-Universität Erlangen-Nürnberg Institut für Werkstoffwissenschaften 6 / AlN Martensstr. 7, 91058 Erlangen Vorlesung Grundlagen der WET I Dr.-Ing. Matthias Bickermann, Prof. Dr. A. Winnacker D. MAGNETISMUS UND MAGNETISCHE MATERIALIEN 1. Grundlagen Ein Stromfluss I durch eine Spule (Länge d, Windungszahl n) erzeugt in ihrem Innen ren nach den Maxwell'schen Gleichungen ein Magnetfeld der Feldstärke H = I d [A/m]; die magnetische Induktion(sflussdichte) im Vakuum ist als B0 = μ 0 H [T = Vs/m²] definiert ( μ 0 = 4π ⋅ 10 −7 Vs/Am ist die magnetische Feldkonstante). Befindet sich Materie im Magnetfeld, so wird diese magnetisiert und insgesamt ein "Feld" B = μ 0 (H + M ) induziert. Die Magnetisierung M [A/m] erfolgt also zusätzlich zur Induktion im Vakuum; man kann dies auch durch die Permeabilitätszahl µr [–] ausdrücken mit B = μ 0 μ r H und M = (μ r − 1)H = χ H mit χ als magnetischer Suszeptibilität [–]. In Vakuum gilt µr = 1 (χ = 0). Als magnetische Polarisation J bezeichnet man schließlich die durch die Materie zusätzlich erzeugte Induktionsflussdichte J = μ 0 M = μ 0 (μ r − 1)H [T]; damit gilt B = μ 0 H + J . Die Energiedichte eines Magnetfelds ist w = ∫ B ⋅ dH [J/m³]. [Bild 1] Die Induktion bewirkt einen Spannungsstoß Uind beim Ausschalten des Stromflusses durch die Spule. Der Induktionsfluss durch den Spulenquerschnitt A beträgt ∞ Φ = ∫ U ind ⋅ dt = A ⋅ B [Wb = Vs = Tm²]. 0 Bei dreidimensionaler Betrachtung sind H, M, B, J und Φ Vektorgrößen. Betrachtet man unterschiedliche Magnetisierungsrichtungen im Material (siehe Abschnitt 6), so sind χ und µr als Tensoren aufzufassen. 2. Diamagnetismus Alle Materie zeigt einen diamagnetischen Effekt: Ein Magnetfeld koppelt an die Elektronen-Bahnen, die Elektronen-Spins und (tausendfach schwächer) an die Spins der Atomkerne. [Bild 2] Nach der Lenz'schen Regel wird hierdurch das Feld abgeschwächt, d.h. es gilt e² N χ < 0 . Eine quantenmechanische Rechnung führt zu χ ≈ − μ 0 Z a ra2 , d.h. der V 6 me Betrag von χ ist proportional zur Zahl der äußeren Elektronen Za und dem Quadrat des Atomradius ra. N/V ist die Zahl der Atome pro Volumen [1/cm³], me die Elektronenmasse und e die positive Elementarladung [As]. Typische Werte sind χ dia ≈ −10 −5... − 10 −4 . Supraleiter sind ideale Diamagneten mit χ = –1. [Tab. 1] 3. Paramagnetismus Die Summe der Bahndrehimpulse L und der Elektronenspins S ist bei abgeschlossenen Schalen jeweils Null; solche Materialien sind diamagnetisch. Liegen nicht abgeschlossene Schalen vor (z.B. in Kristallen mit Übergangsmetallen oder seltenen Erden), so entsteht ein paramagnetischer Effekt. [Bild 3] Das magnetische Moment m hat Anteile des Bahndrehimpulses und/oder des Elektr r r r eh ronenspins von mL = − μ B L und mS = g S μ B S ( μ B = ist das Bohr'sche Magne2 me ton [J/T], gS = 2,0023 ist der elektronische g-Faktor). Die Magnetisierung M ist gleich N der Dichte der magnetischen Dipolmomente m im Material: M = m . V Ohne Magnetfeld gibt es keine Vorzugsrichtung und damit auch keine Magnetisierung. Erst bei Magnetfeld richten sich die Spins aus; mit dem Gesamtr angelegtem r r drehimpuls J = L + S kann man die Magnetisierung bei T = 0 K schließlich berechnen r N r zu M = μ B g J . g [–] ist jetzt der gyromagnetische Faktor (Landé-Faktor) der AtoV me. Nebenbemerkung aus der Quantenmechanik: Alle Drehimpulsbeträge sind jer2 r2 r2 weils gequantelt: L = m(m + 1) h 2 , S = s(s + 1) h 2 und J = j ( j + 1) h 2 . Die thermische Energie wirkt einer Spinausrichtung entgegen; bei Raumtemperatur ist die thermischer Energie etwa 100 Mal größer als die magnetische Polarisation! Die Berechnung der Verteilung der Spinzustände (Boltzmann-Statistik) führt zu r N C j ( j + 1) r M = μ B2 g 2 ⋅ B , d.h. M ~ T–1. Man schreibt χ ~ mit C als (materialspezifi3kT T V scher) Curie-Konstante. Bei Raumtemperatur werden (positive!) Werte von χ para ≈ 10 −4...10 −3 erreicht, bei den seltenen Erden sogar bis χ para ≈ 1 . [Tab. 1] Man kennt noch andere paramagnetische Effekte (Pauli-Paramagentismus der Leitungselektronen, van-Vleck-Paramagnetismus der Atome in angeregten Zuständen), die aber um Größenordnungen geringer als der oben beschriebene LangevinParamagnetismus sind. 4. Ferromagnetismus Ferromagnetische Stoffe besitzen eine spontane Magnetisierung ohne anliegendes Magnetfeld und ein Hystereseverhalten, d.h. remanentem Magnetismus MR nach Ausschalten des Feldes, der erst durch Anlegen einer negativen Koezitivfeldstärke HC verschwindet. Die Suszeptibilität χ wird eine Funktion der Feldstärke H. [Bild 4] Ursache für den Ferromagnetismus ist die Austauschwechselwirkung. Benachbarte Elektronenspins spüren einander; die Energien für antiparallele ("Singulett") und parallele ("Triplett") Zustände sind um eine Austauschkonstante J verschieden. Im Wasserstoffmodell ist J immer negativ, der Grundzustand ist das Singulett. Bei Ferromagneten ist J > 0, alle Spins wollen sich parallel zueinander anordnen. [Bild 5] Man erklärt den Ferromagnetismus phänomenologisch durch ein intrinsisches "inneres Magnetfeld" (Weiß'sches Feld) H W = λ M im Material, das auch ohne äußeres Magnetfeld H existiert, indem sich aufgrund von Spinfluktuationen die Magnetisierung C "hochschaukelt". Mit dem Ansatz M = χ (H + HW ) = (H + HW ) und Auflösen nach M T C H . Oberhalb einer kritischen Temperatur TC = Cλ (CurieT −C λ Temperatur) hebt die thermische Energie die Austauschwechselwirkung auf und das C Material verhält sich paramagnetisch: χ ~ (Curie-Weiß-Gesetz). Knapp unT − TC kommt man auf M = 1 ⎛ T ⎞3 ⎟⎟ , weit unterhalb TC ist die Magnetisierung terhalb von TC nähert man mit χ ~ ⎜⎜1 − T C ⎠ ⎝ (bei jeweils gleichem Feld H) praktisch temperaturunabhängig. In Weichmagneten werden Suszeptibilitäten von χ > 105 erreicht. [Bild 6] [Tab. 1] 5. Antiferro- und Ferrimagnetismus Auch Materialien mit einer negativen Austauschkonstante J können langreichweitige magnetische Ordnungen aufbauen, falls die Austauschwechselwirkung über mehrere Nachbarn hinwegreicht. Beispiele hierfür sind Mangan, Chrom sowie Mangan-, Kobalt- und Nickel-(II)-oxid. Man spricht von Antiferromagnetismus, wenn benachbarte Untergitter entgegengesetzte Magnetisierungen der gleichen Größe aufbauen. Antiferromagnete besitzen unterhalb der sog. Néel-Temperatur TN komplizierte und geordnete Übergitterstrukturen und haben eine wesentlich höhere Suszeptibilität als Paramagnete; darüber erfolgt ein Abfall analog zum Curie-Weiß-Gesetz. Wenn sich die Magnetisierungen der Untergitter nicht aufheben und eine Restmagnetisierung bei H = 0 verbleibt, so spricht man von Ferrimagnetismus. Er verhält sich wie ein abgeschwächter Ferromagnetismus. Bekannteste Ferrimagnete sind die Ferrite wie z.B. Magnetit Fe3O4. [Bild 7] [Bild 8] Für die Elemente kann mit dem Bethe-Slater-Diagramm die Größe der Austauschkonstante abgelesen und ferro- bzw. antiferromagnetisches Verhalten vorhergesagt werden. [Bild 9] 6. Domänenstruktur Ein wichtiges Kennzeichen des Ferromagnetismus ist die Domänenstruktur. Sie bil1 B 2 , die das Material aufwenden det sich aufgrund der Streufeldenergie E B = 2 μ0 muss, um ein äußeres Magnetfeld auszubilden, das die Magnetisierung kompensiert (ansonsten wären die Magnetfeldlinien nicht geschlossen). Damit bilden sich (außer in Nanopartikeln) in unterschiedliche Richtungen magnetisierte Volumenbereiche aus, die man Domänen (Weiß'sche Bezirke) nennt. Magnetische Domänen können in einem Kerr-Mikroskop sichtbar gemacht werden. [Bild 10] Domänen sind ausschließlich in bestimmten kristallographischen Richtungen magnetisiert. In diesen "leichten" Richtungen ist die Austauschwechselwirkung besonders hoch. Es hängt vom Kristallgitter und den enthaltenen Atomen (Elektronenorbitalen) ab, welche Richtungen "leicht" und welche "schwer" zu magnetisieren sind. Daneben gibt es in kleinen Partikeln noch eine Form-Anisotropie: Domänen richten sich bevorzugt entlang der längsten Achse aus. [Bild 11] In einem Ferromagnet wachsen bei zunehmendem Magnetfeld die günstig orientierten Domänen auf Kosten der ungünstig orientierten (linearer Bereich der Hysteresekurve), erst bei hohen Feldstärken dreht sich die Magnetisierung in einigen Domänen hin zur Magnetisierungsrichtung (Sättigungsbereich der Hysteresekurve). [Bild 12] [Bild 13] Domänen werden durch Blochwände begrenzt. In diesen 200…300 Å dicken Zwischenschichten dreht sich die Spinorientierung schrittweise senkrecht zur Wand (helikal) und zur neuen Orientierung hin. Sowohl die Bildung als auch die Verschiebung einer Blochwand kostet Energie. Abrupte Verschiebungen einer Blochwand (die z.B. an einem Defekt gepinnt ist) führen zu Sprüngen in der Hysteresekurve, die man z.B. mit einem Lautsprecher als Knacken hörbar machen kann (Barkhausen-Effekt). In einem ferromagnetischen Material strebt die Summe aus Streufeld- und Domänenbildungsenergie zu einem Minimum hin. Daraus lässt sich bei bekannten Energiegrößen die Anzahl der Domänen in einem Magneten abschätzen. [Bild 14] [Bild 15] 7. Magnetostriktion Die Ausrichtung der Spins im Magnetfeld kann zu einer geringfügigen Änderung der Gitterkonstanten des Ferromagneten führen. Dieser Effekt wird Magnetostriktion genannt und jeweils in Sättigungsmagnetisierung gemessen. Typische Werte für ⎛ ΔL ⎞ λs = ⎜ ⎟ liegen im Bereich 10–6…10–5. Man beachte, dass die thermische Aus⎝ L ⎠s dehnung pro Kelvin in einer ähnlichen Größenordnung liegt. Die Magnetostriktion des Eisenjochs ist die Ursache für das "Brummen" von Transformatoren. 8. Hart- und Weichmagnete Ferro- und ferrimagnetische Werkstoffe lassen sich in drei Klassen bezüglich der Anwendungsgebiete einteilen. Für Hart- und Dauermagnete wird ein großes BHProdukt (Energiedichte) sowie eine hohe Remanenz verlangt, um eine Ummagnetisierung zu verhindern. Die Remanenz wird durch eine geeignete Kornstruktur erzielt. Typische Materialien sind AlNiCo, SmCo5 und NdFeB. [Tab. 2] Weichmagnete werden oft in Wechselstromanwendungen engesetzt (Spulenjoch, Trafoblech). Sie sollen eine hohe Sättigungspolarisation besitzen und sich leicht ummagnetisieren lassen. Dazu muss das BH-Produkt möglichst kein sein, um Energieverluste zu minimieren. Typische Materialien sind Fe (auch mit C- oder Si-Zusatz), Permalloy (Ni78Fe22) und Mumetall (Ni77Fe16Cu5Cr2). Für Mittel- und Hochfrequenzanwendungen werden elektrisch isolierende Materialien wie z.B. Ferrite bevorzugt, um Wirbelstromverluste zu vermeiden. [Tab. 2] Für die Datenspeicherung (Cassette, Magnetbänder, Festplatte) werden Hartmagnete benötigt, die sich aber dennoch mit geringen Feldstärken ummagnetisieren lassen. Kleine Strukturen sind eine Voraussetzung für eine hohe Speicherdichte. Man verwendet dünne Filme mit kleinen, kunststoffgebundenen Partikeln aus γ-Fe2O3, CrO2 oder Eisen. Die Formanisotropie (z.B. in nadelförmigen Partikeln) wird ausgenutzt, um eine hohe Remanenz zu erzielen. [Bild 16] 9. Magnetoresistive Effekte Magnetsensoren detektieren Magnetfelder und geben diese Information über eine Widerstandsänderung weiter. Insbesondere die steigende Aufzeichnungsdichte in der magnetischen Datenspeicherung führt zu immer kleineren Bauteilen, die immer kleinere Magnetfelder zuverlässig detektieren müssen. Die physikalische Auflösungsgrenze liegt bei Längsaufzeichnung (Domänen parallel zur Leserichtung) bei etwa 3⋅1010 bit/cm² (180 GB/in²), bei Senkrechtaufzeichnung etwa eine Größenordnung höher. Darüber beeinflussen sich benachbarte Magnetfelder so stark, dass die Daten nicht stabil gespeichert werden. Bei allen magnetoresistiven Effekten wird ausgenutzt, dass der Streuquerschnitt von Leitungselektronen (und damit der elektrische Widerstand) von der Richtung der Magnetisierung abhängt. Es handelt sich jeweils um Quanteneffekte. Beim anisotropen magnetoresistiven Effekt (AMR) ändert sich der Widerstand in einer 20 nm dünnen Permalloy-Schicht richtungsabhängig um 1–4%. Er kommt in älteren Festplatten (Lesekopf) sowie in Meßsystemen und Winkelsensoren zum Einsatz. Der gigantische magnetoresistive Effekt (GMR) führt zu Widerstandsänderungen von bis zu 80%. Eine ultradünne nichtmagnetische, aber elektrisch leitende Schicht trennt zwei ferromagnetische Schichten, die sich deshalb antiparallel magnetisieren. Eine dieser Schichten kann durch ein äußeres Magnetfeld leicht ummagnetisiert werden. In der parallelen Stellung sinkt der Widerstand, weil sich die Streuung an den Grenzflächen für Elektronen mit der "richtigen Spinstellung" verringert. [Bild 17] Trennt man die ferromagnetischen Schichten durch einen sehr dünnen Isolator, so kann der magnetoresistive Tunneleffekt (TMR) beobachtet werden. Sind beide Schichten in der gleichen Richtung magnetisiert, so besitzen Elektronen, deren Spinrichtung übereinstimmt, eine höhere Tunnelwahrscheinlichkeit. Kontrolliert man die Magnetisierung der Schichten mit einem äußeren Magnetfeld, so kann man spinpolarisierte Elektronen erzeugen (sog. Spin-Valve-Bauteil). 10. Bilder Bild 1: Stromdurchflossene Spule Bild 2 Bahnimpuls und Elektronenspin Bild 4: Hysteresekurve (man kann statt B auch J oder M gegen H auftragen) Bild 5: Austauschwechselwirkung Bild 3: Dia-, para- und ferromagnetische Elemente. Bild 6: Verlauf der Matgnetisierung eines Ferromagneten unterhalb der Curietemperatur Bild 7: Antiferromagnetische Ordnung in einem tertragonalen oder kubisch raumzentrierten Gitter (Beispiele: Cr, MnF2, FeF2, CoF2) Material χ [10–6] Material χ [10–6] Material TC [°C] Cu – 5,5 Mn 530 Fe 1043 Si – 3,9 FeO 7200 Co 1404 SiO2 – 29,6 O2 8700 Ni 631 SiBr4 – 129 Eu 34000 Gd 289 Bi – 280 Tab. 1: Suszeptibilitäten dia- und paramagnetischer Werkstoffe; Curie-Temperaturen ferromagnetischer Werkstoffe Bild 8: In Ferrit (FeIIO⋅FeIIIFeIIIO3) hebt sich die Magnetisierung der Fe3+-Untergitter auf, aber die Magnetisierung von Fe2+ führt zu ferrimagnetischem Verhalten. Bild 9: Bethe-Slater-Diagramm: J ist die Austauschkonstante, r/rd das Verhältnis zwischen Atomabstand und Radius der nichtabgeschlossenen d- bzw. f-Schale Bild 11: Leichte und schwere Richtungen in Eisen Bild 10: Domänen in einem NdFeBMagneten unter dem Kerr-Mikroskop Bild 12: Änderung der Domänenstruktur mit zunehmendem Magnetfeld Bild 13: Neukurve und Entmagnetisierung eines Eisenblechs. Eingezeichnet sind die verschiedenen Stadien der Domänenbewegung und -Sättigung sowie der Barkhauseneffekt. Bild 14: Blochwand Bild 16: Typische Hysteresekurve von a) Hartmagneten b) Weichmagneten c) Partikel für magnetische Datenspeicherung Bild 15: Ausbildung von Abschlussdomänen zur Streufeldminimierung. Die rechte Anordnung hat praktisch kein Streufeld mehr und erscheint nach außen als unmagnetisiert Material HC [A/m] (B⋅H)max [J/m³] Material HC [A/m] χ [–] ρ [Ωcm] JS [T] AlNiCo 105 30–80 Fe 10–50 1000 1⋅10–5 2,14 SmCo5 1,5⋅105 210 Fe97Si3 8–16 3000 1⋅10–5 2,04 NdFeB 1,2⋅105 330 NiFeMo < 0,5 105 1⋅10–5 0,78 Mn-ZnFerrit 600– 1000 10– 1000 10– 1000 0,43 Tab. 2: Kenngrößen wichtiger Hart- und Weichmagnetischer Materialien Bild 17: Erklärung des GMR-Effekts mit der Streuung von Elektronen unterschiedlichen Spins an den Grenzflächen (links). Widerstandsänderung mit äußerem Magnetfeld für verschiedene Dicken der Cr-Zwischenschicht (rechts)