Serie 4
Werbung

D–BAUG
Lineare Algebra und Numerische Mathematik
Prof. Dr. D. Stoffer
Herbst 2007
Serie 4
Definiton: Sind die Vektoren a(1) , a(2) . . . . , a(k) ∈ Rn linear unabhängig, so heisst
U = {x | x = λ1 a(1) + λ2 a(2) + · · · + λk a(k) ; λ1 , λ2 , . . . , λk ∈ R}
k–dimensionaler Unterraum von Rn .
• Ist p ∈ Rn und U ein k–dimensionaler Unterraum von Rn , so nennt man
p + U := {x | x = p + u, u ∈ U }
einen k–dimensionalen affinen Raum.
• Affine Räume der Dimension 1 heissen Geraden in Rn .
• Ist a ∈ Rn , a 6= 0 und λ ∈ R, so heisst
Hλ (a) := {x | aT x = λ}
Hyperebene.
13. Sei
A=
2 3 1
4 0
1 2 0 −2 1
a) Bestimmen Sie die Lösungsmenge L0 des homogenen linearen Gleichungssystems A x = 0.
Wieviele freie Parameter gibt es? Die Lösungsmenge L0 ist ein k–dimensionaler
Unterraum von R5 . Bestimmen Sie k.
b) Bestimmen Sie die Lösungsmenge des linearen Gleichungssystems A x = b für
b = (1, 2)T .
Bestimmen Sie p ∈ R5 , so dass die Lösungsmenge die Form
{x | x = p + u mit u ∈ L0 }
hat. Die Lösungsmenge ist somit ein k–dimensionaler affiner Raum. Wie gross
ist k?
Bitte wenden!
14. Sei a = (0, 2, 1, 3)T und b = (−1, 2, 3, 1)T .
a) Bestimmen Sie die Hyperebene H0 (a) und H−3 (a) in Koordinatendarstellung
und in Parameterdarstellung. Sind das Unterräume? Sind das affine Räume? Wie
gross ist deren Dimension?
b) Begründen Sie, warum der Vektor a senkrecht auf allen Vektoren von H 0 (a)
steht.
Der Vektor a ist ein Normalenvektor der Hyperebene Hλ (a). Bestimmen Sie den
Winkel zwischen den Hyperebenen H1 (a) und H−1 (b).
Bemerkung: Der Winkel zwischen den Hyperebenen H1 (a) und H−1 (b) ist der Winkel
zwischen den beiden Normalenvektoren der beiden Ebenen.
Siehe nächstes Blatt!
PSfrag replacements
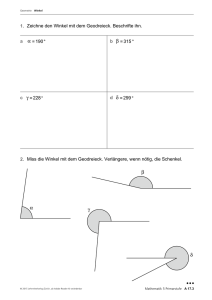
15. Gegeben sei das Oktaeder mit den Eckpunkten:
1
0
−1
A = 0 , B = 1 , C = 0 ,
0
0
0
0
0
0
D = −1 , E = -10 und F = 0 .
−2
20
0
1
-1
-0.5
0
0.5
1
1.5
-2
-1.5
-1
-0.5 D
0
0.5
1
1.5
2
2.5
z
E
C
y
B
A
x
F
a) Bestimmen Sie die Winkel ]AEB und ]AEC.
b) Bestimmen Sie die Koordinaten des Punktes P auf der Kante AE, so dass der
Winkel ]AP B = 90◦ ist.
c) Bestimmen Sie den Winkel zwischen den zwei Ebenen AEB und AED und
zwischen den Ebenen AEB und ABF .
Ergebnisse:
a) ]AEB ≈ 36.87◦ und ]AEC ≈ 53.13◦
b) P (4/5, 0, 2/5)
c) ](NAEB , NAED ) ≈ 83.62◦ und ](NAEB , NABF ) ≈ 141.06◦
Bitte wenden!
16. Gegeben sei ein Einheitsvektor v des R3 . Seien die 3×3 Matrizen A, P und H definiert
durch
A := vv T ,
P := I3 − vv T ,
H := I3 − 2vv T .
a) Zeigen Sie: A2 = A, P 2 = P , H 2 = I3 .
b) Die Matrizen A, P und H definieren lineare Abbildungen
A : x ∈ R3 −
7 → y = Ax ∈ R3
P : x ∈ R3 −
7 → y = P x ∈ R3
H : x ∈ R3 −
7 → y = Hx ∈ R3
Beschreiben Sie die Abbildungen A, P, H geometrisch.
Hinweis: Zerlegen Sie den Vektor x in zwei Teile senkrecht und parallel zu v,
d.h. x = x⊥ + xk mit v T x⊥ = 0 und v T xk = kxk k.
c) Zeigen Sie: Die Abbildung H is orthogonal.
Hinweis: Es genügt zu zeigen, dass die Matrix H orthogonal ist.
d) Welche der drei linearen Abbildungen sind invertierbar, welche sind Projektionen?
Bemerkung: Eine lineare Abbildung L : Rn → Rn heißt Projektion, falls L ◦ L = L.
Die Matrix H heißt Householdermatrix und die Abbildung H Householdertransformation.
Abgabe: Donnerstag, 01. 11. 2007 in der Übungsgruppe
http://www.math.ethz.ch/education/bachelor/lectures/hs2007/other/linalgnum_BAUG/