Zusammenfassung Theorie I
Werbung

Theoretische Physik I
WS 2011/2012
1
Mechanik
1.1
Grundlegendes und Newtonsche Mechanik
Die Mechanik wird zur Beschreibung und quantitaiven Vorhersage der Bewegung materieller Körper gebraucht. Sie geht dabei von folgendem Begriffsrahmen aus:
• Raum-Zeit modeliert durch E3 × R absolute Zeit, Raum als euklidscher
Punktraum: homogen, isotrop, elementare Geometrie (keine Krümmung)
• Körper zusammengesetzt aus Massepunkten im Kontinuumslimes
• Bewegung werden durch Bahnkurven beschrieben ~x(t) : R → E3 , die
Zeit ist keine Koordinate von Raum-Zeit-Ereignissen (später: Relativitätstheorie)
Um nun die Mechnik beschreiben zu können, führen wir ein Koordinatensystem ein. (Wahl von drei linear unabhängigen Basisvektoren e~i und eines
Bezugspunktes). Das Bezugssystem setzt sich aus dem Koordinatensystem
dem Anfangsnullpunkt (Zeitnullpunkt) und der Bahnkurve des Beobachters
zusammen.
Die Beschreibung der Bewegung erfolgt durch Kinematik:
Impuls: p~(t) ≡ m~v (t),
1
p~(t)2 ,
kin. Energie: T = 21 m~v (t)2 = 2m
Geschwindigkeit: ~v (t) ≡ ~x˙ (t),
Beschleunigung: ~a(t) ≡ ~x¨(t) uvm.
1
Newtonsche Gesetze
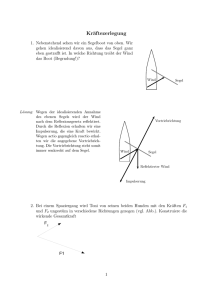
1. Es gibt Bezugssysteme, in denen die Kräftefreie Bewegung durch ~x˙ (t) =
~v = const. beschrieben wird.
2. Die Bahnkurve folgt aus dem Aktionsprinzip
F~ (~x(t), ~v (t), t) = p~˙(t)
3. Die Summe der Kräfte, die Massenpunkt 1 auf Massepunkt 2 ausübt
und umgekehrt verschwindet:
F~12 + F~21 = 0
Dies sind die 3 Axiome der klassischen Mechanik. Axiom 1 definiert hierbei Inertialsysteme. Aus Axiom 2 erhält man bei bekanntem Kraftgesetz
eine DGL 2 Ordnung für die Bahnkurve. In Nicht-Inertialsystemen müssen
Scheinkräfte wie die Zentripetalkraft oder die Corioliskraft addiert werden,
um das Aktionsprinzip zu erhalten.
Beispiele für Kraftgesetze:
Stokes-Reibung: F~ = α~v
~ + ~v × B)
~
Lorentzkraft: F~ = q(E
Gravitationskraft: F~ =
Gm1 m2
~er
r2
Ein besionderes Augenmerk liegt auf konservativen Kräften, für die die Arbeit
vom Weg unabhängig ist.
R
F~ · d~x
C
~
F~ = −∇V
mit V dem Potential der Kraft. Wichtige Beispiele für konservative Kräfte
~ = ~x × p~ erhalten →
sind z.B Zentralkraäfte F~ = F~ (|~x|)~x →Drehimpuls L
~
Bewegung in Ebene senkrecht zu L
2
In konservativen Kraftfeldern ist die Gesamtenergie erhalten: E = T + V =
const.
Eindimensionaler Spezialfall:
p Rx
E = m2 ẋ2 + V (x) ⇒ t − t0 = ± m2 x0 dx0 √ 1 0
E−V (x )
Dies kann auch auf Zentralkraftprobleme angewendet werden, da die Bewegung separierbar in Schwerpunktsbewegung und Relativbewegung ist.
Die Physik soll natürlich und unabhängig vom Bezugssystem sein.
→ Die Mechanik ist invariant unter Galilei-Transformationen:
• Translation des Raumes: ~x → ~x + ~a ⇒ Impulserhaltung
• Translation der Zeit: t → t + T ⇒ Energieerhaltung
• Drehung um konstanten Winkel: ~x → D~x ⇒ Drehimpulserhaltung
• Galilei-Boost mit Geschwindigkeit: ~v , ~x → ~x + ~v t ⇒ Erhaltung der
Schwerpunktsgeschwindigkeit
Dies sind die Erhaltungssätze der klassischen Mechanik. Invarianz unter
Translation der Zeit gilt jedoch nicht uneingeschränkt (gilt z.B. bei Reibungskräften). Bei einem Systen aus N Teilchen gelten die Erhaltungssätze
nicht für die einzelnen Beträge sondern nur für den Gesamtimpuls etc.
1.2
Weitere Formulierungen der Mechanik
Die Newtonsche Formulierung ist jedoch sehr schwerfällig und meist für die
praktische Anwendung ungeeignet, da die Zwängskräfte, welche die Bewegung einschränken meist unbekannt sind. Man sollte sich also nach anderen
Möglichkeiten umsehen.
Ein System mit N Teilchen unterliege f Zwangsbedingungen ⇒ s = 3N − f
Freiheitsgerade, die durch generalisierte Koordinaten q1 , ..., qs beschrieben
werden.
Hamiltonsches Prinzip:
Rt
δ( t01 dtL(qi , q̇i , t)) = 0,
δqi (t0 ) = δqi (t1 ) = 0
Dabei ist L = T − V die Lagrange-Funktion.
3
Als Bewegungsgleichungen bekommt man die Euler-Lagarnge-Gleichungen
d ∂L
dt ∂ q̇i
−
∂L
∂qi
Die Euler-Lagrange-Gleichung ist forminvariant unter Koordinatentransformation qa → Qa (q, t). Für Qa , Q̇a gelten dieselben Bewegungsgleichungen.
Somit ist diese Form wesentlich besser geeignet als die Newtonsche Mechanik, die nur in Inertialsystemen einfache Differentialgleichungen (ohne Scheinkräfte) angibt.
Die Lagrange-Formulierung erweist sich als besonders nützlich bei Diskussionen von Symmetrien: Falls eine Koordinate qa zyklisch, d.h. L hängt nur
eine Erhaltungsgröße. Die
von q̇a ab, so ist der kanonische Impuls pa = ∂∂L
q̇a
Allgemeine Formullierung erfolgt dann mittels Noether-Theorem: Zu jeder
kontinuierlichen Symmetrietransformation qa → qa + Qa , 1, (Qa ist
Generator der Transformation) gehört ein erhaltener Noether-Strom.
Statt des Variablenpaares (qa , q̇a ) kann man auch (qa , pa ) benutzen → Phasenraum. Den Übergang erhält man mittels einer Legendre-Transformation
auf die Hamiltonfunktion
P
H = H(qa , pa , t) = a pa q̇a − L(qa , pa , t)
Die q̇a sind hierbei durch pa zu ersetzen.
Die Euler-Lagrange-Gleichungen gehen dann über in Hamiltonsche Bewegungsgleichungen
q̇a =
∂H
,
∂pa
∂H
ṗa = − ∂q
a
Bei zyklischen Variablen ist ṗa = 0, d.h. ein Teil der Gleichung ist trivial.
Zu beachten: Ist ∂L
= 0, dann ist H = E = T + V
∂t
Die Symmetrischere Formulierung erfolgt mit Hilfe der Poisson-Klammern
P ∂f ∂g
∂f ∂g
{f, g} = a ( ∂q
− ∂p
)
a ∂pa
a ∂qa
q̇a = {qa , H},
ṗa = {pa , H}
mittels Korrespondenzprinzip {...} → [...] (Kommutator) in der Quantenmechanik zu Heisenbergschen Bewegungsgleichungen.
Ist {f, H} = 0, so ist f eine Erhaltungsgröße.
4
Wenn für eine Koordinatentransformation Qa = Qa (q, p, t), Pa = Pa (q, p, t)
die Eigenschaften {Qa , Qb } = {Pa , Pb } = 0, {Qa , Pb } = δab gelten, so ist die
Transformation kanonisch. Die Hamiltonschen Bewegungsgleichungen sind
forminvariant unter kanonischen Transformationen.
Eine Lösungsmethode hierfür: Bestimme kanonische Transformationen so,
dass alle Koordinaten Qa zyklisch werden.
5
2
Elektrodynamik
Teilchen haben neben ihrer Masse eine Ladung Q als weitere grundlegende
Eigenschaft, die im Gegensatz zur Masse positiv oder negativ geladen sein
kann. Das Gebiet geladener und ihrer Eigenschaften ist die Elektrodynamik,
welche eine Feldtheorie ist. Im Vordergrund stehen Felder, die den ganzen
Raum erfüllen und die elektromagnetische Wechselwirkung vermitteln.
2.1
Maxwellgleichungen
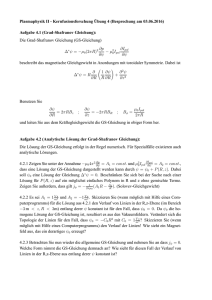
Die gesamte Elektrodynamik ist in den Maxwellgleichungen enthalten,
~ · E(~
~ x, t) = 4πkρ(~x, t)
∇
~ · B(~
~ x, t) = 0
∇
(II)
~ × E(~
~ x, t) + k 0 ∂B(~x,t) = 0
∇
∂t
~ × E(~
~ x, t) −
∇
x,t)
1 ∂B(~
k0 c2
∂t
(I)
(III)
= 4πkk 0~j(~x, t)
(IV )
sowie dem Lorentz-Kraftgesetz
~ x, t) + k 0~x˙ (t) × B(~
~ x, t)),
F~ (~x, t) = q(E(~
dass die Kraft auf einen Körper der Ladung q, der sich mit der Geschwin~ x, t) und magnetischen Feld B(~
~ x, t) bewegt
digkeit ẋ(t) im elektrischen E(~
angibt. c ist hierbei die Lichtgeschwindigkeit im Vakuum und ρ(~x, t), ~j(~x, t)
sind die Ladungs- bzw. Stromdichten. Die Konstanten k, k 0 hängen hierbei jeweils vom Einheitensystem ab. Im Gauß- System ist k = 1, k 0 = 1/c
und im SI-System gilt für k = 1/4π0 und k 0 = 1. Ferner gilt 0 µ0 = 1/c2 Im
Folgenden verwenden wir das Gauß-System.
6
Die Maxwellgleichungen drücken folgende Sachverhalte aus:
• Gleichung (I)+(II): Die elektrische Ladung ist die Quelle des elektrischen feldes, während es keine magnetische Ladung
gibt. Bei einer disP
kreten Ladungsverteilung gilt dabei ρ(~x, t) = i qi δ(~x − ~xi )
• Gleichung (III): Zeitlich veränderte Magnetfelder induzieren elektrische
Wirbelfelder. Dies ist vor allem für die elektromagnetische Induktion,
sowie für die Erzeugung elektromagnetischer Wellen von Bedeutung.
• Gleichung (IV): Beschreibt Quellen von magnetischen Feldern, sowohl
Ströme als auch zeitlich veränderliche elektrische Felder.
Anmerkungen:
• Das Vorzeichen in (III) ist gerade so gewählt, dass der induzierte Strom
der Ursache entgegenwirkt (Lenzsche Regel)
• Aus den Maxwellgleichungen folgt ebenso die Ladungserhaltung, ausgedrückt durch die Kontinuitätsgleichung
∂ρ
∂t
~ · ~j = 0
+∇
Elektromagnetische Felder haben Energie und Impuls, wobei beide wie in
der Mechanik Erhaltungsgrößen sind. Energieerhaltung (Poyntingsches Theorem):
∂mech
∂t
+
∂em
∂t
~ ·S
~
= −∇
~ 2+
Hierbei ist die elektromagnetische Energiedichte gegeben durch em = 1/8π(E
~ 2 ), die Energiestromdichte (Poynting-Vektor) durch S
~ = c/4π E
~ ×B
~ und
B
∂mech
~ gegeben.
die Ableitung der mechanischen Energiedichte ist als ∂t = ~j · E
Mit Hilfe des Maxwellschen Spannungstensor kann eine ähnliche Gleichung
für die Impuslbilanz aufgestellt werden (wird hier jedoch nicht behandelt, da
dies noch“ zu schwierig ist).
”
7
2.2
Lösung der Maxwellgleichungen
Um die Maxwellgleichung eindeutig zu lösen, müssen die Randbedingungen
bekannt sein. Wenn man das Feld im ganzen Raum betrachtet, so nimmt
man an, dass keine Ladungen und Ströme in unendlicher Entfernung existie~ und B
~ mindestens als 1/r2 im Unendlichen zu Null werden.
ren, so dass E
Um nun die Maxwellgleichungen zu lösen führen wir elektromagnetische
~ und Φ ein:
Potentiale A
~ x, t) = ∇
~ × A(~
~ x, t),
B(~
~ x, t) = −∇Φ(~
~ x, t) −
E(~
~ x,t)
1 ∂ A(~
c
∂t
Die homogenen Gleichungen von (II) und (III) sind somit automatisch gelöst.
Es bleiben noch (I) und (IV) welche zu folgenden übergehen
∆Φ(~x, t) +
~ x, t) −
∆A(~
~ x,t)
1 ∂ 2 A(~
c2
∂t2
1 ∂ ~
∇
c ∂t
~ x, t) = −4πρ(~x, t)
· A(~
~ ∇
~ · A(~
~ x, t) +
− ∇(
x,t)
1 ∂Φ(~
)
c
∂t
(I 0 )
~j(~x, t)
= − 4π
c
(II 0 )
Da diese Gleichungen in der Regel noch immer zu kompliziert sind, vereinfa~ B
~ sind invariant
chen wir diese indem wir die Eichfreiheit verwenden. E,
unter
~ x, t) → A(~
~ x, t) + ∇χ(~
~ x, t),
A(~
~ x, t) → Φ(~
~ x, t) −
Φ(~
x,t)
1 ∂χ(~
c
∂t
~ und B
~ physikalisch relevant sind,
mit einer beliebigen Funktion χ. Da nur E
ändert man nichts an der Physik, solange man diese unverändert lässt. Somit
darf man die Potentiale im Rahmen der Eichfreiheit beliebig wählen.
relevante Eichungen:
~ ·A
~ = 0. Das elektrische Potential erfüllt die
• Coulomb-Eichung:∇
Poissongleichung ∆Φ(~x, t) = −4πρ(~x, t) mit der Lösung Φ(~x, t) =
R 3 0 ρ(~x0 ,t)
d x |~x−~x0 | . Die Ladung am Ort ~x0 wirkt sich am Beobachtungspunkt
~x ohne Zeitverzögerung aus.
x,t)
~ ·A
~ = 0. Die Potentiale erfüllen die Wel• Lorenz-Eichung: 1c ∂Φ(~
+∇
∂t
lengleichungen
Φ(~x, t) = −4πρ(~x, t),
~ x, t) = − 4π ~j(~x, t);
A(~
c
8
:= ∆ −
1 ∂2
c2 ∂t2
Für die Felder erhalten wir hier
~ x, t) =
B(~
4π ~
∇
c
× ~j(~x, t),
~ x, t) = −4π(∇Φ(~
~ x, t) +
E(~
x,t)
1 ∂~j(~
)
c2 ∂t
Im Vakuum (ρ = 0, ~j = 0) erfüllen die Felder eine Wellengleichung. Da die
Wellengleichungen linear sind, werden sie mittels Superposition von homogener und inhomogener Lösung gelöst. dazu gehen wir in den Fourier-Raum
über. Die homogene Lösung lautet:
R
R
~ x, t) = Re( d3 k3 i~k ×~(~k)ei(~k·~x−ωt) )
~ x, t) = Re( d3 k3 iω ~(~k)ei(~k·~x−ωt) ), B(~
E(~
(2π) c
(2π)
mit der Dispersionsrelation ω = c|~k| und dem Polarisationsvektor ~(~k). Die
Wellen sind transversal, d.h. es gilt ~ · ~k = 0. Für eine ebene Welle ist
~(~k) ∝ δ(~k − ~k0 ). Dh. nur eine Frequenz ω0 = c|~k0 | tritt auf (monochromatische Welle). Ist zudem i~(~k0 ) reell, so liegt eine linear polarisierte Welle
vor. Wellen breiten sich mit Lichtgeschwindigkeit aus.
Für die inhomogene Lösung (ρ 6= 0, ~j 6= 0) verwenden wir das Konzept
der Greenfunktion:
R
R
Φ(~x, t) = −4π d3 x0 dt0 G(~x, t, ~x0 , t0 )ρ(~x0 , t0 )
~ x, t)). Die Kausalität erfordert eine retardierte Greenfunktion
(analog für A(~
0
x0 |
ret )
0 0
mit tret = t − |~x−~
. Die Informationen breiten sich
Gret (~x, t, ~x , t ) = δ(t|~x−t
−~
x0 |
c
mit endlicher Geschwindigkeit aus. Die Lösung lautet:
R
R
x0 ,tret )
)
~ ret (~x, t) = 1 d3 x0 ~j(~x0 ,tret
Φret (~x, t) = d3 x0 ρ(~
,
A
0
|~
x−~
x|
c
|~
x−~
x0 |
Sind spezielle Randbedingungen zu erfüllen, so kann man eine Anpassung
der homogenen Lösung durchführen.
2.3
Statische Probleme
Falls keine Zeitabhängigkeit vorliegt, müssen wir die Maxwell-Gleichungen in
zwei Gleichungen der Elektrostatik und zwei der Magnetostatik entkoppeln.
Die Lösungen ergeben sich aus dem vorigen Abschnitt (Die Lorenz-Eichung
und die Coulomb-Eichung fallen hier zusammen). Die Potentiale erfüllen die
Poisson-Gleichung
~ x) = − 4π ~j(~x)
∆A(~
c
∆Φ(~x) = −4πρ(~x),
9
Die Lösung ist wieder eine Summe aus homogener und inhomogener Lösung.
Die homogene Lösung ist eine harmonische Funktion und da nur die Nulllösung
in ganz R3 harmonisch und endlich ist, braucht man bei der Lösung nur die
inhomogene Lösung der Poisson-Gleichung.
Elektrisches Feld:
R
~ x) = ∇Φ(~
~ x), Φ(~x) = d3 x0 ρ(~x0 )0
E(~
|~
x−~
x|
Das elektrostatische Feld ist wirbelfrei. Für eine Punktladung bekommt
R 3 man
das Coulomb-Potential Φ(~x) = Q/|~x| mit der Gesamtladung Q = d xρ(~x)
Magnetisches Feld:
R
~ x) = ∇
~ × A(~
~ x), A(~
~ x) = 1 d3 x0 ~j(~x0 )0
B(~
c
|~
x−~
x|
R
~ x) = 1 d3 x0~j(~x0 ) × ~x−~x00 3
Biot-Savart-Gesetz: B(~
c
|~
x−~
x|
Ist die Lösung nur im endlichen Volumen gesucht, so ist die inhomogene
Lösung nicht Null und im allgemeinen nicht eindeutig. Eindeutig wird sie
nur bei bestimmten Randbedingungen.
10