Arbeit und Energie
Werbung

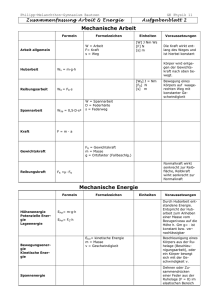
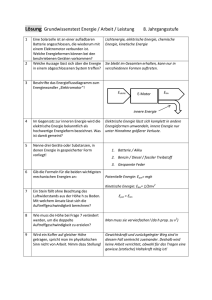
Arbeit und Energie Wir befassen uns mit den mechanischen Energieformen. Zunächst stellen wir fest, was physikalisch gesehen der Begriff „Arbeit“ bedeutet: Arbeit wird dann verrichtet, wenn einem System Energie zugeführt bzw. abgenommen wird. Arbeit ist also die Veränderung der Energie eines Systems. Anders ausgedrückt bedeutet Arbeit gespeicherte Energie. Wenn man eine Last anhebt, z.B. eine Tafel Schokolade oder ein Auto, muss man dem System Energie zuführen, d.h. Arbeit an ihm verrichten. Die Arbeit berechnet sich aus dem Produkt aus Kraft und Weg. Das Formelzeichen für die Arbeit ist das W, die Einheit ist: [W] = Nm oder [W] = J. Beispiele: 1. Senkrechtes Anheben einer Tafel Schokolade um einen Meter W = F⋅s W = m⋅g⋅s m W = 0,1kg⋅9,81 2⋅1 m s W = 0,981Nm 2. Senkrechtes Anheben eines Autos mit der Masse 800 kg um 12 m W = F⋅s W = m⋅g⋅s m W = 800 kg⋅9,81 2⋅12 m s W = 94176Nm Wenn die Kraft und der Weg nicht parallel zueinander verlaufen, muss der Anteil der Kraft parallel zum Weg gefunden werden. Mit Hilfe der folgenden Skizze kann man sich das plausibel machen: Kraft und Weg verlaufen unter dem Winkel α zueinander. Das eingezeichnete rechtwinklige Dreieck macht deutlich, dass die Ankathete des Dreiecks parallel zum Weg verläuft. Also lautet der Anteil der Kraft parallel zum Weg F · cos α. Für die verrichtete Arbeit wird das zu W = F⋅cos ⋅s bzw. W = F⋅s⋅cos 3. Schieben eines Schrankes (Gewichtskraft 1000 N) 10 m entlang eines um 1° ansteigenden Weges. FH s α = 1° FG FN Der Anteil der gegebenen Gewichtskraft parallel zum Weg ist die Hangabtriebskraft FH. Die wird berechnet durch FG · sin α. Das hier nun der Sinus verwendet wird, liegt daran, dass die Gewichtskraft aufgrund der schiefen Ebene in Hangabtriebskraft und Normalkraft aufgeteilt wird. Die Aufteilung der Kraft hat noch nichts mit der Arbeit zu tun, da der Winkel der schiefen Ebene genutzt wird und nicht der Winkel zwischen Kraft und Weg. Den Cosinus können wir verwenden, wenn wir nicht den Steigungswinkel der Ebene betrachten, sondern den Winkel zwischen Gewichtskraft und Wegrichtung. Der beträgt nämlich 91°. Es gilt: F H = F G⋅sin und F s = F G⋅cos 90 Wie man an der Skizze erkennt, weist FH in die entgegengesetzte Richtung zu s. Aus der Berechnung mit dem Cosinus des Winkels zwischen FG und s folgt eine Kraft parallel zu s, die negativ ist, also auch entgegengerichtet zu s. Es gilt: sin α = - cos (90+α). Für die Berechnung der benötigten Arbeit benötigen wir noch die Länge des Weges. Hier ist s = 10 m. W W W W = F⋅s = m⋅g⋅cos90⋅s = 1000 N⋅−0,017 ⋅10 m = − 170 Nm Wir bekommen jetzt ein negatives Ergebnis, weil wir die Arbeit an dem System verrichten müssen. Wir müssen also eine Arbeit von 170 Nm erbringen um den Schrank um eine Strecke von 10 m nach oben zu bewegen. Vergleichen wir jetzt die Arbeit, die in das System Schrank gesteckt wurde (170 Nm) mit dem Produkt aus Gewichtskraft und dem parallel zur Gewichtskraft verlaufenden Weg, erkennen wir, dass beide Berechnungswege zum selben Ergebnis führen. In einer Skizze erkennt man, dass die Höhe, d.h. der senkrechte Abstand des Zielpunktes von der Startebene ebenfalls mit dem Sinus des Steigungswinkels der schiefen Ebene zu berechnen ist. Also: F H⋅s = F G⋅sin ⋅s = F G⋅s⋅sin = F G⋅h = m⋅g⋅h s sin α = h s h α So haben wir eine Verknüpfung der Gewichtskraft mit der senkrechten Höhe über einem „Nullniveau“ geschaffen, die für die Berechnung der sogenannten potentiellen Energie, auch Lageenergie oder Höhenenergie genannt, genutzt wird. E pot = m⋅g⋅h Wenn ein Körper auf eine bestimmte Höhe über dem Erdboden gebracht wird und fallen gelassen wird, wandelt sich seine potentielle Energie für die Dauer des Falls in kinetische oder Bewegungsenergie um. Der Körper verliert an Höhe (= potentielle Energie nimmt ab) und gewinnt an Geschwindigkeit (= kinetische Energie nimmt zu). Ist der Körper am Boden angekommen, bzw. ist er sehr kurz davor, beträgt die potentielle Energie Epot = 0, wegen h = 0. Sämtliche potentielle Energie wurde in kinetische Energie umgewandelt. Die Umwandlung lässt sich auch an der Veränderung der Formel erkennen: E pot = m⋅g⋅h 1 = m⋅g⋅ ⋅g⋅t 2 2 1 = ⋅m⋅g⋅t 2 2 1 = ⋅m⋅v 2 = E kin 2 Für die kinetische Energie können wir also schreiben: 1 E kin = ⋅m⋅v 2 2 Zur Veränderung der Formel: Im ersten Schritt wird die Höhe h wegen s = ½ a t2 in ½ g t2 umgewandelt. Anschließend werden g und t, die beide quadratisch vorkommen, zusammengefasst. Im letzten Schritt wird wegen v = a t der Teil (g t)2 zu v2. Beachte bitte, dass der zurückgelegte Weg s hier als Höhe h bezeichnet wird, und da es sich um einen freien Fall handelt, ist die Beschleunigung a = g. Damit kommen wir zu der dritten mechanischen Energieform, der Spannenergie. Die Spannenergie ist die Energie, die durch das Spannen eines elastischen Gegenstands in diesem gespeichert wird. Dabei berechnet sich die Spannenergie nach folgender Vorschrift: 1 E spann = ⋅D⋅s 2 2 Der Faktor D bezeichnet die Federkonstante der Feder. Sie lässt sich berechnen, indem man misst, um welchen Weg s sich eine Feder bei einer Belastung mit einer Kraft F ausdehnt. Es gilt: D= F s Die Einheit der Federkonstanten ist demnach: [D] = N / m Die Federkonstante ist für jeweils eine Feder konstant, solange sie im elastischen Bereich belastet wird. Erfolgt die Belastung plastisch, d.h.mit einer bleibenden Verformung, gilt D nicht mehr. Wir hatten oben gesagt, dass durch Arbeit die Energie eines Systems verändert werden kann. Die Energie kann vermehrt werden, wenn an einem System Arbeit verrichtet wird, Energie kann aber auch abgegeben werden, wenn das System Arbeit verrichtet, z.B. durch Reibung. Ohne Arbeit bleibt die Energie eines Systems konstant. Das gilt für die Gesamtenergie, also die Summe aus allen Energieformen, für uns: kinetische, potentielle und Spannenergie. Es gilt: E Gesamt = E pot E kin E spann 1 1 E Gesamt = m⋅g⋅h ⋅m⋅v 2 ⋅D⋅s 2 2 2 E Gesamt = konstant
![(Microsoft PowerPoint - Schiefe Ebene neu [Kompatibilit\344tsmodus])](http://s1.studylibde.com/store/data/002786812_1-a86ecfe8592ad0b6ef23ad078aebf081-300x300.png)