Einführung in die Physik I Kinematik der Massenpunkte
Werbung

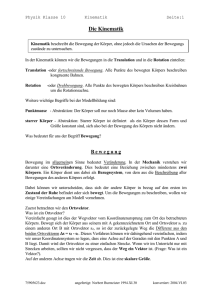
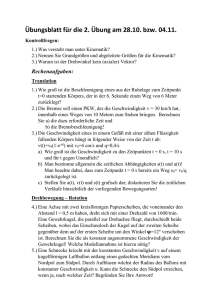
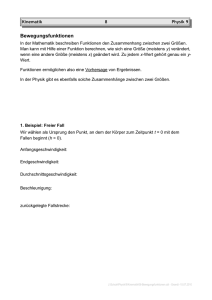
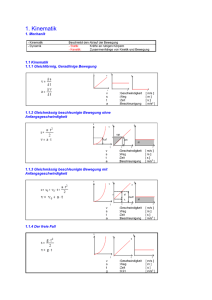
Einführung in die Physik I Kinematik der Massenpunkte O. von der Lühe und U. Landgraf Ort und Geschwindigkeit • Wir betrachten den Ort eines als punktförmig angenommenen Körpers im Raum als Funktion der Zeit 0 • x Ort Eindimensionale Position x Ort • • Verändert der Körper seinen Ort im Laufe der Zeit t, so wird x eine Funktion der Zeit: x = x(t) x Δx Die Geschwindigkeit v ist die Änderung des Ortes mit der Zeit. Δt 0 Kinematik t Zeit 2 Ort, Geschwindigkeit und Beschleunigung • Ein ruhendes Objekt verändert den Ort nicht mit der Zeit Steigung = 0 Ort 0 Zeit t • Ein gleichförmig bewegtes Objekt hat eine konstante Geschwindigkeit v. Die Ableitung von x(t) nach der Zeit t ist überall gleich groß Steigung > 0 Steigung < 0 Ort 0 Zeit • Ein nicht gleichförmig bewegtes Objekt unterliegt einer Beschleunigung a . Die Geschwindigkeit ist eine Funktion der Zeit v = v(t) Ort Steigung ist variabel 0 Zeit Kinematik 3 Mathematische Formulierung • Die Geschwindigkeit v wird mathematisch ausgedrückt durch die Ableitung des Orts x(t) nach der Zeit v= • • d x(t ) dt Für ein nicht gleichförmig bewegten Körper ist die Geschwindigkeit ebenfalls eine Funktion der Zeit: v = v(t) Die Beschleunigung a wird mathematisch ausgedrückt durch die Ableitung der Geschwindigkeit v(t) nach der Zeit. Sie entspricht der zweiten Ableitung des Orts nach der Zeit d v(t ) d 2 x(t ) a= = dt dt 2 • Ist die Beschleunigung a konstant, so wird der Körper gleichförmig beschleunigt Kinematik 4 Einheiten von Geschwindigkeit und Beschleunigung • • • • • Die Einheit der Geschwindigkeit ist „Änderung einer Länge“ (gemessen in [m]) dividiert durch „Änderung der Zeit“ (gemessen in [s]) Einheit von v ist [m s-1] Die Einheit der Beschleunigung ist „Änderung einer Geschwindigkeit “ (gemessen in [m s-1]) dividiert durch „Änderung der Zeit“ (gemessen in [s]) Einheit von a ist [m s-2] Merkregel: bei jeder Ableitung ergibt sich die Einheit des Ergebnisses aus der Einheit der abgeleiteten Funktion dividiert durch die Einheit der Größe, nach welcher abgeleitet wird Kinematik 5 Beispiel: freier Fall • • • Als „freien Fall“ bezeichnet man die Bewegung eines Körpers unter dem Einfluss einer konstanten Beschleunigung, d.h. die Bewegung eines gleichförmig beschleunigten Körpers. Bekanntestes Beispiel ist ein im Gravitationsfeld der Erde fallen gelassener Körper In der Nähe des Erdbodens ist die vom Gravitationsfeld bewirkte Beschleunigung konstant: [ g = 9.80665 m s −1 • ] Konventionell wird der Ort als „Höhe“ z, mit positiver Richtung nach oben gemessen; daher muss g ein negatives Vorzeichen haben Kinematik 6 Berechnung der Höhe beim freien Fall • Zu einem Zeitpunkt t = 0 wird der Körper losgelassen. Für diesen Zeitpunkt gilt: z (0) = z0 v(0) = 0 • • Nach einer Zeit Δt beträgt die Geschwindigkeit v(Δt ) = -g·Δt, nach der doppelten Zeit ist v(2Δt ) = -2g·Δt, usw. Allgemein kann v(t) durch Integration der Beschleunigung über die Zeit für einen beliebigen Zeitpunkt t > 0 ermittelt werden: v(t ) = t t 0 0 t ′ ′ ′ ( ) 1 − g d t = − g d t = − g 0 [t ] = − g ⋅ t + g ⋅ 0 ∫ ∫ = − gt Kinematik 7 Berechnung der Höhe beim freien Fall Die Höhe z(t) zum Zeitpunkt t kann durch Integration der Geschwindigkeit v(t) ermittelt werden: Freier Fall aus 100 m Höhe 100 t z (t ) = z0 + ∫ v(t ′) dt ′ 80 0 t t = z0 + ∫ (− gt ′) dt ′ = z0 − g ∫ t ′ dt ′ 0 0 t 1 1 ⎡1 ⎤ = z0 − g ⎢ t ′2 ⎥ = z0 − g ⋅ t 2 + g ⋅ 0 2 2 ⎦ 0 ⎣2 1 = z0 − gt 2 2 60 Höhe [m] • 40 20 0 0 1 2 3 4 Zeit [s] Kinematik 8 Freier Fall mit Anfangsgeschwindigkeit • Hat der Körper zu Beginn des Falls eine Anfangsgeschwindigkeit v(0) = v0, so gilt für die Geschwindigkeit t v(t ) = v0 + ∫ (− g ) dt ′ = v0 − gt 0 • Dann ergibt sich die Höhe z als Funktion der Zeit t t 0 0 z (t ) = z0 + ∫ v(t ′) dt ′ = z0 + ∫ (v0 − gt ′) dt ′ t t 0 0 = z0 + ∫ v0 dt ′ − g ∫ t ′ dt ′ 1 2 = z0 + v0t − gt 2 Kinematik 9 Bewegungen in mehreren Dimensionen • • • • In der Welt unserer Erfahrung werden Orte und Strecken im Raum durch die Angabe von drei Längen festgelegt – Länge, Breite, Höhe Zur Angabe von Orten benötigt man ein Koordinatensystem Viele physikalische Probleme lassen sich bequem im Cartesischen Koordinaten (nach René Descartes, 1596 – 1650) darstellen Darstellung des Ortes durch einen Vektor Kinematik z x y ⎛ x ⎞ ⎛ x(t ) ⎞ r ⎜ ⎟ ⎜ ⎟ X = ⎜ y ⎟ = ⎜ y (t )⎟ ⎜ z ⎟ ⎜ z (t ) ⎟ ⎠ ⎝ ⎠ ⎝ 10 Berechnungen mit Koordinatenvektoren • Addition und Subtraktion • skalares Produkt • Skalarprodukt • ⎛ x1 ⎞ ⎛ x2 ⎞ ⎛ x1 + x2 ⎞ r r ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ X 1 + X 2 = ⎜ y1 ⎟ + ⎜ y2 ⎟ = ⎜ y1 + y2 ⎟ ⎜z ⎟ ⎜z ⎟ ⎜z +z ⎟ ⎝ 1⎠ ⎝ 2⎠ ⎝ 1 2 ⎠ ⎛ x1 ⎞ ⎛ x2 ⎞ ⎛ x1 − x2 ⎞ r r ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ X 1 − X 2 = ⎜ y1 ⎟ − ⎜ y2 ⎟ = ⎜ y1 − y2 ⎟ ⎜z ⎟ ⎜z ⎟ ⎜z −z ⎟ ⎝ 1⎠ ⎝ 2⎠ ⎝ 1 2 ⎠ ⎛a⋅x⎞ r ⎜ ⎟ a⋅ X = ⎜a⋅ y⎟ ⎜a⋅z⎟ ⎝ ⎠ ⎛ x1 ⎞ ⎛ x2 ⎞ r r ⎜ ⎟ ⎜ ⎟ X 1 ⋅ X 2 = ⎜ y1 ⎟ ⋅ ⎜ y2 ⎟ = x1 x2 + y1 y2 + z1 z 2 ⎜z ⎟ ⎜z ⎟ ⎝ 1⎠ ⎝ 2⎠ r X = Betrag Kinematik r r X ⋅X = x2 + y2 + z 2 11 Geschwindigkeit und Beschleunigung in mehreren Dimensionen • • Die Geschwindigkeit gibt die Änderung des Ortes mit der Zeit für jede Richtung im Koordinatensystem unabhängig an, und kann daher auch als Vektor mit drei Komponenten dargestellt werden Dasselbe gilt für die Beschleunigung. Sie gibt die Änderung der Geschwindigkeit mit der Zeit für jede Richtung unabhängig an. Kinematik ⎛v ⎞ r ⎜ x⎟ V = ⎜ vy ⎟ ⎜v ⎟ ⎝ z⎠ ⎛ dx(t ) ⎞ ⎟ ⎜ dt ⎟ ⎜ ( ) dy t ⎟ =⎜ ⎜ dt ⎟ ⎜ dz (t ) ⎟ ⎟ ⎜ dt ⎠ ⎝ ⎛a ⎞ r ⎜ x⎟ A = ⎜ ay ⎟ ⎜a ⎟ ⎝ z⎠ 2 ⎛ dv x ⎞ ⎛ d x(t ) ⎞ ⎟ ⎜ ⎟ ⎜ 2 ⎟ ⎜ dt ⎟ ⎜ dt 2 dv y ⎟ ⎜ d y (t ) ⎟ ⎜ =⎜ =⎜ ⎟ dt 2 ⎟ dt ⎜ dv ⎟ ⎜ d 2 z (t ) ⎟ ⎟ ⎜⎜ z ⎟⎟ ⎜⎜ 2 ⎟ ⎝ dt ⎠ ⎝ dt ⎠ 12 Beispiel: der schiefe Wurf • • In diesem Beispiel ist der zeitliche Verlauf des Ortes eines im Schwerefeld der Erde geworfenen Körpers für jede der drei Raumrichtungen anders Wir nehmen an, dass der Körper zum Zeitpunkt t = 0 vom Ursprung des Koordinatensystems schräg in die Richtung der x-Achse und nach oben (Richtung der z-Achse) geworfen wird • Die Anfangsbedingungen lauten somit • Die Beschleunigung wirkt nur in Richtung der z-Achse Kinematik ⎛ 0⎞ r ⎜ ⎟ X (0 ) = ⎜ 0 ⎟, ⎜ 0⎟ ⎝ ⎠ ⎛ vx0 ⎞ r ⎜ ⎟ V (0 ) = ⎜ 0 ⎟ ⎜v ⎟ ⎝ z0 ⎠ ⎛ 0 ⎞ r ⎜ ⎟ A=⎜ 0 ⎟ ⎜− g ⎟ ⎠ ⎝ 13 Beispiel: der schiefe Wurf • • • • • r Gesucht ist das Zeitgesetz für den Ort in den drei Raumrichtungen X (t ) Für jede Richtung müssen Beschleunigung und Geschwindigkeit integriert werden In Richtung der y-Achse sind die Anfangsgeschwindigkeit und die Beschleunigung gleich Null. Die Lage des Körpers erfährt in dieser Richtung keine Änderung mit der Zeit. Damit ist die Position des Körpers in der y-Richtung gleich der Position für t = 0, d.h., y(t) = 0 In der Richtung der x-Achse hat der Körper die Anfangsgeschwindigkeit vx0. Da die Beschleunigung in diese Richtung ebenfalls Null ist, gilt x(t) = vx0·t Das Problem in der Richtung der z-Achse wurde schon für den freien Fall gelöst vx 0 ⋅ t ⎛ x(t ) ⎞ ⎛ ⎞ r ⎜ ⎟ ⎜ ⎟ X (t ) = ⎜ y (t )⎟ = ⎜ 0 ⎟ ⎜ z (t ) ⎟ ⎜ v ⋅ t − 1 2 g ⋅ t 2 ⎟ ⎝ ⎠ ⎝ z0 ⎠ Kinematik 14 Darstellung Schiefer Wurf vx0 = 10 [m s-1] vz0 = 30 [m s-1] Kinematik 15 Die Kreisbewegung • Kreisbewegung: – Bewegung eines Körpers mit konstantem Abstand r zum Mittelpunkt M des Kreises – Veränderlicher Winkel ϑ(t) mit einer Referenzrichtung (z.B. X-Achse) • Die Winkelgeschwindigkeit ist die Änderung des Winkels ϑ mit der Zeit Y ϑ X d ϑ (t ) ω= dt • Die Einheit der Winkelgeschwindigkeit ist [Umdrehung pro Sekunde] oder [s-1] Kinematik 16 Die Kreisbewegung • Die momentane Geschwindigkeit v des Körpers – ist tangential zum Kreis – steht senkrecht auf der Verbindungslinie vom Kreismittelpunkt zum Körper • r v ● Ortsvektor – verbindet Kreismittelpunkt mit dem momentanen Ort des sich bewegenden Körpers – hat konstante Länge r • Y X Betrag der momentanen Geschwindigkeit r r dϑ r v = ω⋅ r = ⋅r dt Kinematik 17 Mathematischer Umweg: das Vektorprodukt • r r r X1 × X 2 = X 3 • • • r X3 Mithilfe des Vektorprodukts (Kreuzprodukt) wird aus zwei Vektoren ein dritter Vektor gebildet, der zu beiden anderen senkrecht steht r X2 r r r X 3 = X 1 ⋅ X 2 ⋅ sin (α ) Rechte-Hand-Regel bestimmt die Richtung des Ergebnisvektors Das Vektorprodukt ist nicht kommutativ Sind zwei Vektoren parallel zueinander, verschwindet ihr Vektorprodukt Kinematik α r X1 r r r r X1 × X 2 = − X 2 × X1 ⎛ x3 ⎞ ⎛ y1 z 2 − z1 y2 ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ y3 ⎟ = ⎜ x1 z 2 − z1 x2 ⎟ ⎜z ⎟ ⎜x y − y x ⎟ ⎝ 3⎠ ⎝ 1 2 1 2⎠ 18 Die Kreisbewegung • Darstellung der Winkelgeschwindigkeit als Vektor: – Steht senkrecht auf Ortsvektor und Geschwindigkeitsvektor – Liegt in Richtung der Drehachse r r r v = ω×r ⎛ x⎞ ⎛ vx ⎞ ⎛0⎞ r ⎜ ⎟ r ⎜ ⎟ r ⎜ ⎟ r = ⎜ y ⎟, v = ⎜ v y ⎟, ω = ⎜ 0 ⎟ ⎜0⎟ ⎜0⎟ ⎜ω ⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ Kinematik r ω r v r r ⎛ r ⋅ cos(ϑ (t ))⎞ ⎜ ⎟ r r (t ) = ⎜ r ⋅ sin (ϑ (t )) ⎟ ⎜ ⎟ 0 ⎝ ⎠ 19 Die gleichförmige Kreisbewegung • Ist die Winkelgeschwindigkeit konstant, dann ist die Kreisbewegung gleichförmig ϑ (t ) = ω ⋅ t r ω r v r r ⎛ r ⋅ cos(ωt )⎞ ⎟ r ⎜ r = ⎜ r ⋅ sin (ωt ) ⎟ ⎜ ⎟ 0 ⎝ ⎠ ⎛ r ⋅ cos(ωt )⎞ ⎛ − rω sin (ωt )⎞ ⎟ ⎜ ⎟ r d ⎜ v = ⎜ r ⋅ sin (ωt ) ⎟ = ⎜ rω cos(ωt ) ⎟ dt ⎜ ⎟ ⎜ ⎟ 0 0 ⎝ ⎠ ⎝ ⎠ Kinematik 20 Beschleunigung auf der Kreisbahn • Da die Richtung des Geschwindigkeitsvektors zeitabhängig ist, gibt es eine Beschleunigung ⎛ − rω sin (ωt )⎞ r ⎟ r dv d ⎜ a= = ⎜ rω cos(ωt ) ⎟ dt dt ⎜ ⎟ 0 ⎝ ⎠ ⎛ − r ⋅ ω 2 ⋅ cos(ωt )⎞ ⎟ ⎜ r 2 = ⎜ − r ⋅ ω ⋅ sin (ωt ) ⎟ = − ω 2 ⋅ r ⎟ ⎜ 0 ⎠ ⎝ • r ω r v r r r a Die Beschleunigung ist dem Radiusvektor entgegengesetzt parallel Zentripetalbeschleunigung Kinematik 21 Harmonische Schwingung • Viele Bewegungen lassen sich als Schwingungen darstellen – Gebundene Bewegung um eine Ruhelage – „Harmonische Bewegung“ – Darstellung durch eine Sinusoder Kosinusfunktion der Zeit t – Begrenzte Amplitude r • • Eine harmonische Schwingung ist eine Kreisbewegung „von der Seite betrachtet“ Ort und Beschleunigung sind proportional zueinander – Differentialgleichung für harmonische Schwingungen (zwei Schreibweisen) Kinematik x(t ) = r ⋅ sin (ωt ) dx(t ) dt d 2 x(t ) 2 a (t ) = − r ⋅ ω ⋅ sin (ωt ) = dt 2 v(t ) = r ⋅ ω ⋅ cos(ωt ) = d 2 x(t ) 2 + ω ⋅ x(t ) = 0 2 dt &x&(t ) + ω 2 x(t ) = 0 22 Harmonische Schwingung – Frequenz und Kreisfrequenz • Kreisfrequenz ω: – Winkel ϑ im Bogenmaß – Eine Umdrehung entspricht 2π – Einheit [s-1] • Frequenz ν: – Inverse Länge der Periode der Schwingung in [s] – Eine Umdrehung entspricht einer Periode – Einheit [s-1] oder Hertz [Hz] x(t ) = r ⋅ sin (ω ⋅ t ) = r ⋅ sin (2π ⋅ν ⋅ t ) ω = 2π ⋅ν Kinematik 23 Harmonische Schwingung Harmonische Schwingung 1.5 10 1 Geschwindigkeit [m s^-1] 5 Ort [m] 0.5 0 0 0.5 5 1 1.5 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 10 Zeit [s] Ort Geschwindigkeit Kinematik 24 Harmonische Schwingung Harmonische Schwingung 1.5 40 1 Beschleunigung [m s^-2] 20 Ort [m] 0.5 0 0 0.5 20 1 1.5 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 40 Zeit [s] Ort Beschleunigung Kinematik 25