Der Gravitationstrichter - Institut für Experimentalphysik V
Werbung

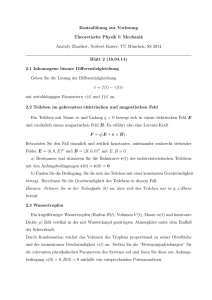
07.11.2011 Der Gravitationstrichter Uwe Czarnetzki Institut für Plasma- und Atomphysik Fakultät für Physik und Astronomie Ruhr-Universität Bochum Zur Veranschaulichung der Planetenbewegung wird häufig ein Gravitationstrichter verwendet. Beliebt sind Gravitationstrichter auch in öffentlichen Räumen als Spendentrichter/Geldsammler. Der Trichter ist so geformt, dass eine Kugel oder eine Münze, die sich auf der Oberfläche des Trichters bewegt, eine potentielle Energie besitzt, die vom Radius wie -1/r abhängt, d.h. identisch mit dem Gravitationspotential. Die Kugel/Münze wird üblicherweise radial am Rande eingeführt und befindet sich daher anfänglich auf einer Kreisbahn. Im Unterschied zur Planetenbewegung gibt es aber Reibung und letztendlich stürzt der Körper in einer Spirale in den Trichter. Wie sich zeigen wird, gibt es aber auch aufgrund der Zwangskräfte und der Bewegung in tatsächlich drei Dimensionen deutliche Abweichungen von der Bewegungsgleichung eines Planeten. Abb. 1: Beispiel eines großen Gravitationstrichters als Spendentrichter/Geldsammler mit zwei Einwurfvorrichtungen für Münzen in radialer Richtung am Rande. 1. Drehimpulsverlust durch Reibung Zunächst sein ein Teilchen in einem echten Gravitationspotential betrachtet. Die rein radiale gerichtete Gravitationskraft erhält den Drehimpuls L, da sie kein Drehmoment M hervorruft. r dL r r r =M =r ×F . (1) dt r Dies gilt nicht für die Reibungskraft Ff , die immer der Geschwindigkeit entgegengerichtet ist. Damit hat die Reibungskraft auch eine Komponente einer zum Radius r r r r r senkrechten Richtung ( v = r& = r& er + rϕ& eϕ + z& ez ). Häufig ist die Reibungskraft direkt proportional zur Geschwindigkeit (Stokesche Reibung): -1- 07.11.2011 r r r Ff = − mν v = − mν r& . (2) r v r Dies vorausgesetzt folgt daraus mit der Definition des Drehimpulses L = m (r × r& ) : r r dL r r = −ν m r × r& = −ν L . dt ( ) Die Lösung dieser Gleichung ergibt eine exponentielle Abnahme des Drehimpulses: r r L = L0 e −ν t . (3) (4) Die Zeitkonstante des Drehimpulsverlustes ist durch die Frequenz für Impulsverlust ν gegeben. Dieses Ergebnis wird nachfolgend noch von Bedeutung sein. Für andere Geschwindigkeitsabhängigkeiten der Reibung nimmt der Drehimpuls ebenfalls ab; es ergibt sich dann aber keine so einfache Lösung. 2. Konzept zur Beschreibung der Bewegung im Gravitationstrichter Reibung führt darüber hinaus zu Energieverlust. Aufgrund dieses reibungsbedingten Energieverlustes kann die Bewegung des Teilchens im Gravitationstrichter nicht mit der Energiegleichung beschrieben werden. Es muss die Newtonsche Bewegungsgleichung verwendet werden. Dabei ist aber zu beachten, dass das Teilchen sich nicht frei im Raum bewegt, sondern die Bewegung durch die Oberfläche beeinflusst ist. Die Oberfläche bewirkt eine Zwangskraft, d.h. eine Kraft, die die Normalkomponente aller Kräfte auf die Oberfläche genau kompensiert. Mit diesem Konzept ist sichergestellt, dass das Teilchen auf der Oberfläche keine Beschleunigung in diese hinein erfährt, d.h. genau auf der Oberfläche verbleibt. Die Kräfte in der Newton-Gleichung setzen sich also zusammen aus der Gravitationskraft Fg, der Reibungskraft Ff und der Zwangskraft der Oberfläche Fo: r r r r (5) m &r& = Fg + Ff + Fo . Die Oberfläche des Gravitationstrichters wird in Zylinderkoordinaten durch eine Funktion z(r) beschrieben. Man beachte, dass die Funktion konkav sein muss, d.h. ∂ 2 z / ∂r 2 = z ' ' < 0 . Weiterhin sei z (r → ∞) = 0 und z (r → 0) = 0 , d.h. es treten nur negative z-Werte auf. Tatsächlich spielt sich die Bewegung aber bauartbedingt zwischen einem maximalen Radius beim Start am äußeren Rand und einem minimalen Radius am Boden des Trichters ab. Zunächst ist es aber darüber hinaus nicht weiter notwenig, die Funktion im Detail zu spezifizieren. Dies soll erst an einem späteren Punkt der Rechnung passieren. r z Abb. 2: Schema der Funktion z(r), die den Gravitationstrichter beschreibt. -2- 07.11.2011 Die Schwerkraft zeigt in die negative z-Richtung: r r Fg = − m g ez . (6) Die Reibungskraft wird hier entsprechend Gleichung (2) als proportional zur Geschwindigkeit angenommen. Dies repräsentiert die Reibung des Teilchens mit der Luft. 3. Bestimmung der Zwangskraft Die Zwangskraft setzt sich aus drei Anteilen zusammen. Diese entstehen aus den Kräften, die zum einen die Schwerkraft (a) und zum anderen die Zentrifugalkräfte aufgrund von Bewegung in ϕ-Richtung (b) und z/r-Richtung (c) auf die Oberfläche ausüben. In den Fällen (a) und (b) ergibt sich eine effektive Kraft des Teilchens in Richtung auf die Oberfläche. Im Fall (c) zeigt die Kraft jedoch von der Oberfläche aufgrund ihrer konkaven Form weg. Dieser Anteil reduziert also die von der Oberfläche aufzubringende Zwangskraft zur Kompensation der Kräfte (a) und (b). Die generelle Vorgehensweise zur Bestimmung der Anteile der Zwangskraft ist aber in allen Fällen gleich. Zunächst bestimmt man den in Richtung der Oberflächennormalen zeigenden Anteil der jeweiligen Kraft (a) – (c). Der zugehörige Anteil der Zwangskraft der Oberfläche hat dann das umgekehrte Vorzeichen. Schließlich sind noch die lokalen Vektorkomponenten (r- und z-Richtung) der jeweiligen Anteile an der Zwangskraft zu bestimmen. r z ϑ Abb. 3: Schema der Normalkraft (orange) und der Zwangskraft (grün) am Beispiel der Schwerkraft (rot). Man erkennt, dass sich die Vektoranteile der Zwangskraft (grüner Pfeil) aus der Komponente in Richtung der Oberflächennormalen (oranger Pfeil) der jeweiligen Kraft wie folgt ergeben: r r r Fo = − Fn (− sin(ϑ ) er + cos(ϑ ) ez ) . (7) Dabei gilt der folgende Zusammenhang mit der Ableitung z ' = dz / dr der die Oberfläche beschreibenden Funktion z(r): tan(ϑ ) = z ' ⇒ sin(ϑ ) = z' 1+ z '2 und cos(ϑ ) = Die drei Kräfte (a) – (c) und ihre Normalkomponenten sind: -3- 1 1+ z ' 2 . (8) 07.11.2011 r r r r ⇒ Fan = − m g cos(ϑ ) en Fa = − m g ez r r r r Fb = m r ϕ& 2 er ⇒ Fbn = − m r ϕ& 2 sin(ϑ ) en . r r r z' ' r& 2 + z& 2 r r& 2en en = − m Fc = Fcn = −m 2 Rz 1+ z' (9) Im Fall (c) ist berücksichtigt worden, dass sich zum einen der lokale Krümmungsradius ( ) 3/ 2 / z ' ' ergibt der Kurve und damit der Bahn des Teilchens auf der Oberfläche als Rz = 1 + z '2 (Standardresultat der Differentialgeometrie, z.B. Bronstein) und zum anderen die Geschwindigkeit in z-Richtung an die Geschwindigkeit in r-Richtung über z& = z ' r& gebunden ist. Aus Gleichungen (7) – (9) ergibt sich schließlich die Zwangskraft der Oberfläche als: r r r z' ' Fo = m g cos(ϑ ) + m r ϕ& 2 sin(ϑ ) + m r& 2 (− sin(ϑ ) er + cos(ϑ ) ez ) 2 1+ z' . 2 2 2 r 2 2 r − g z '+ r ϕ& z ' + z ' ' z ' r& er + g + r ϕ& z '+ z ' ' r& ez =m 1 + z '2 ( 4. ) ( ) (10) Bewegungsgleichung eines Teilchens im Gravitationsrichter Die Bewegungsgleichung des Teilchens ergibt sich nun durch Einsetzen der Gleichungen (2), (6) und (10) in die Newton-Gleichung (5). Die einzelnen Richtungskomponenten (r, ϕ, z) sind: g z '+ r ϕ& 2 z '2 + z ' ' z ' r& 2 &r& − r ϕ& = − −ν r& 1 + z '2 . r ϕ&& + 2 r& ϕ& = − ν r ϕ& 2 &z& = (11) g + r ϕ& z '+ z ' ' r& − g −ν z& 1 + z '2 2 2 Nach einigen einfachen algebraischen Umformungen und unter Berücksichtigung von d (r 2 ϕ& ) / dt = r (r ϕ&& + 2 r& ϕ& ) erhält man: (1 + z' )(&r& +ν r&) = − g z'+r ϕ& − z' ' z' r& d (r ϕ& ) = −ν (r ϕ& ) dt (1 + z' )(&z& +ν z& ) = − gz' + r ϕ& z'+ z' ' r& 2 2 2 2 2 2 2 2 . (12) 2 Wie man leicht zeigt, lässt sich die dritte Gleichung (z-Richtung) über den Zusammenhang zwischen z=z(r) in die erste Gleichung (r-Richtung) überführen. Sie enthält also wie erwartet keine zusätzliche Information. Die zweite Gleichung (ϕ-Richtung) ergibt die bereits zuvor gezeigte exponentielle Abnahme des Drehimpulses bzgl. der Rotation in ϕ-Richtung L (Gleichungen (3) und (4)) aufgrund der zur Geschwindigkeit proportionalen Reibung. Die Lösung dieser Gleichung kann also in die erste Gleichung (r-Richtung) eingesetzt werden, um so dort die Winkelabhängigkeit zu entfernen. Damit reduzieren sich die Bewegungsgleichungen schließlich zu folgenden Ausdrücken: -4- 07.11.2011 2 −2ν t L e 1 + z ' (&r& +ν r& ) = − g z '+ 0 − z ' ' z ' r& 2 3 m r . −ν t L0 e ϕ& = m r2 ( 5. 2 ) (13) Energieverlust durch Reibung Nicht nur Drehimpuls sondern auch Energie geht durch Reibung verloren, d.h. sie wird in Wärme umgewandelt (dissipiert). Man spricht daher auch von Impulsverlust, da tatsächlich der gerichtete Impuls einer Bewegung verlorengeht. Dies lässt sich mit der nun gefundenen Formulierung der Kräfte leicht untersuchen. Die Energie E(t) ergibt sich als Summe von kinetischer und potentieller Energie: E= ( ) m r2 m v + m φ g = r& 2 + r 2ϕ& 2 + z& 2 + m g z . 2 2 (14) Durch Differenzieren der Energie nach der Zeit und unter erneuter Ausnutzung des Zusammenhangs zwischen z und r sowie mit Gleichung (12) erhält man: E& = −ν m v 2 ≤ 0 . (15) Ohne Reibung (ν = 0 ) bleibt also die Energie erhalten; im Falle von Reibung ist die Rate jedoch immer negativ, d.h. die Energie nimmt monoton mit der Zeit ab. Die rechte Seite kann auch durch das Doppelte der kinetischen Energie ausgedrückt werden. Hierin kommt erneut zum Ausdruck, dass Reibungsverluste nur bei Bewegung auftreten. Das Ergebnis ist aber kein Zufall. Differenziert man Gleichung (14) nach der Zeit so ergibt sich: r r r r r r r r E& = m v ⋅ v& + m φ&g = m v ⋅ v& + m ∇φ g ⋅ v = v& ⋅ m &r& − Fg . (16) r r Hier ist ausgenutzt worden, dass zum einen d / dt = d r / dt ⋅ ∇ = v ⋅ ∇ und zum anderen r Fg = − m ∇φ gilt. Nun lässt sich Gleichung (16) mit der Newton-Gleichung (5) kombinieren. ( Dies ergibt: ( ) ) r r r r r E& = v ⋅ F0 + F f = v ⋅ F f = −ν m v 2 . (17) Das Skalarprodukt zwischen der Geschwindigkeit und den Zwangskräften der Oberfläche verschwindet, da beide Vektoren per Definition immer senkrecht aufeinander stehen. Das mit Gleichung (15) gefundene Ergebnis musste also so herauskommen. Konservative Kräfte (die sich aus einem Potential ergeben) und Zwangskräfte führen nicht zum Energieverlust. Dies können nur die nicht konservativen Kräfte der Reibung (die Reibungskraft kann nicht aus einem Potential durch Differenzieren gewonnen werden). 6. Anfangsbedingungen und dimensionslose Koordinaten und Parameter Das Teilchen bewege sich anfänglich auf einer Kreisbahn mit r (t = 0) = r0 . Entsprechend gilt z (r0 ) = − z0 ( z0 > 0 ) sowie r&(t = 0) = 0 und &r&(t = 0) = 0 . Damit ergibt sich über Gleichung (13): -5- 07.11.2011 2 L0 3 = g z0 ' r0 . m (18) Setzt man Gleichung (18) in Gleichung (13) ein, so motiviert dies die Einführung folgender dimensionsloser Koordinaten und Parameter: g z0 r z z → r, → z, ν t → t , α = > 0, β = 0 > 0 . r0 z0 ν r0 r0 (19) Aus Gründen der Übersichtlichkeit werden im Folgenden nach der Normierung weiterhin die gleichen Bezeichnungen für r, z und t verwandt wie im unnormierten Fall. Damit vereinfacht sich Gleichung (13) nach Division durch (r0 ν 2 ) zu: (1 + β z' )(&r& + r&) = α 2 ϕ& = α 2 −ν t e , ϕ (0) = 0 r2 2 e −2 t − z '+ 3 − β 2 z ' ' z ' r& 2 , r (0) = 0, r&(0) = 0 r . (20) Man beachte, dass der Parameter α ein Maß für die Reibung ist, d.h. für große Reibung wird α klein und für schwache Reibung groß. β ist ein Maß für die Steilheit des Trichters am Startpunkt. In der Regel wird β << 1 gegeben sein. 7. Lösung der Bewegungsgleichung Zur weiteren Bestimmung der Bewegung des Teilchens muss nun die die Oberfläche beschreibende Kurve z(r) definiert werden. Nimmt man an, dass die Form einem Gravitationspotential ( φg ∝ − 1 / r , Fg ∝ − 1 / r 2 ) entsprechen soll, so ergibt sich (in normierter Darstellung): 1 z=− . r (21) Damit folgt weiterhin β = tan(ϑ0 ) , wobei ϑ0 der Steigungswinkel des Trichters am Startpunkt ist. Für kleine Winkel gilt näherungsweise β ≈ ϑ0 (in Radiant). Für diese Oberfläche nimmt die Bewegungsgleichung nun folgende Form an: 2 β2 α 2 e −2 t 2 r& 1+ 4 (&r& + r& ) = 2 − 1 + 2 β 5 , r (0) = 0, r&(0) = 0 r r r r . e −ν t ϕ& = α 2 ,ϕ (0) = 0 r (22) Gleichung (20) besitzt allerdings für kein wie auch immer geartetes Potential eine analytische Lösung. Die Gleichung muss also numerisch integriert werden. Man kann jedoch für α >> 1 und β <<1 näherungsweise die nicht zu α proportionalen Teile der Gleichung vernachlässigen und erhält dann die einfache Lösung: z ' r 3 = e− 2 t ⇒ r = e− 2 t ⇒ ϕ = -6- α (e 3 3t ) −1 . (23) 07.11.2011 Diese Näherung entspricht wie bei der Kreisbewegung der Balance zwischen Zentrifugalkraft der Bewegung in ϕ-Richtung und Gravitationskraft. Allerdings ist hier berücksichtigt, dass der Drehimpuls exponentiell abnimmt und entsprechend nimmt auch der Radius ab. Durch Einsetzen kann weiterhin r(ϕ) ermittelt werden. Schließlich lassen sich Winkelgeschwindigkeit und Energie bestimmen: ϕ& = α e3 t , vϕ = r ϕ& = α et , E = − e2t . (24) Dabei ist auch die Energie auf den Betrag des Anfangswertes normiert worden ( E / E0 → E mit E0 = m r02 ν 2 α 2 / 2 ). Die Energie nimmt erwartungsgemäß ebenfalls exponentiell ab, Winkelgeschwindigkeit und Kreisfrequenz nehmen aber exponentiell zu. 1.0 -2 0.8 -4 z r 0.6 0.4 -6 0.2 -8 0.0 0.0 0.2 0.4 0.6 0.8 1.0 -10 t 0.0 0.2 0.4 0.6 0.8 1.0 t Abb. 4: Radius und vertikale Position als Funktion der Zeit für α = 10, β = 0.1. Die blaue Kurve gibt die exakte numerische Lösung an, die rote Kurve die analytische Näherung. Natürlich kann man für endliche Werte von α nicht erwarten, dass diese Nährung das Verhalten des Teilchens exakt wiedergibt. Einen genaueren Einblick erlaubt erst die numerische Lösung. Die Normierung der Zeitskala legt eine Untersuchung im Bereich 0 ≤ t ≤ 1 nahe. Als Parameter werden zunächst α = 10 und β = 0.1 (entsprechend einem anfänglichen Steigungswinkel des Trichters von 5.7 Grad) gewählt. Die Näherungslösung beschreibt überraschend gut das generelle Verhalten, obwohl α noch nicht sonderlich groß ist. Darüber hinaus ist aber ein oszillatorisches Verhalten zu erkennen. Dieses ergibt sich aus einer in der Draufsicht elliptischen Bewegung des Teilchens. Die Ursache für das Auftreten von Ellipsen ist leicht einzusehen. Durch Reibung nimmt die Geschwindigkeit des Teilchens ab und es kann sich nicht mehr auf seiner Kreisbahn halten. Die Bewegung nach innen vermittelt dem Teilchen zusätzlich zu seiner anfänglichen Bewegung in ϕ-Richtung nun auch eine radiale Komponente der Geschwindigkeit. Damit kann die Bewegung aber nicht mehr kreisförmig sein und es ergibt sich eine Ellipse. Aufgrund des weiteren Verlustes von Energie und Drehimpuls werden die Ellipsen immer kleiner und das Teilchen stürzt in den Trichter. Die Bewegung ist allerdings stark irregulär, da die Perioden der Oszillation mit der Zeit abnehmen. -7- 07.11.2011 1.0 1.0 0.8 0.5 r y 0.6 0.0 0.4 -0.5 0.2 0.0 0 10 20 30 40 50 60 -1.0 - 1.0 j - 0.5 0.0 x 0.5 1.0 Abb. 5: Radius als Funktion des Winkels und Bahnkurve in x,y-Darstellung (Draufsicht) für α = 10, β = 0.1. Die blaue Kurve gibt die exakte numerische Lösung an, die rote Kurve die analytische Näherung. Die Bewegung erkennt man besonders deutlich in der dreidimensionalen Darstellung: Abb. 6: Bahnkurve des Teilchens im Gravitationstrichter als Funktion der Zeit für α = 10, β = 0.1. Schließlich kann man noch die zeitliche Entwicklung der Energie betrachten. Entsprechend Gleichung (15) muss die Ableitung, d.h. die Steigung, immer negativ sein. Die Energie muss also monoton abnehmen. Dies ist in der Tat der Fall. Es ist bemerkenswert, wie gut die analytische Näherung den exakten Verlauf beschreibt. -8- 07.11.2011 0 E ê E0 -2 -4 -6 -8 -10 0.0 0.2 0.4 0.6 0.8 1.0 t Abb. 7: Energie als Funktion der Zeit für α = 10, β = 0.1. Die blaue Kurve gibt die exakte numerische Lösung an, die rote Kurve die analytische Näherung. Bei sehr großen Werten von α, d.h. schwacher Reibung, nimmt die Amplitude der Oszillation stark ab und die numerische Lösung nähert sich immer besser der analytischen Näherung an. Auch die Bewegung entspricht dann einer einfachen sich immer mehr zusammenziehenden Spirale. Nachfolgend ist die Lösung für α = 100 gezeigt. 1.0 0.8 r 0.6 0.4 0.2 0.0 0.0 0.2 0.4 0.6 0.8 1.0 t Abb. 8: Radius als Funktion der Zeit und Bahnkurve im Gravitationstrichter für α = 100, β = 0.1. Die blaue Kurve gibt die exakte numerische Lösung an, die rote Kurve die analytische Näherung. Erwartungsgemäß verliert die Näherung bei kleinen Werten von α, d.h. starker Reibung, ihre Gültigkeit. Das Teilchen stürzt dann einfach in einer flachen Kurve in den Trichter. -9- 07.11.2011 1.0 0.8 r 0.6 0.4 0.2 0.0 0.0 0.5 1.0 t 1.5 Abb. 9: Radius als Funktion der Zeit und Bahnkurve im Gravitationstrichter für α = 1, β = 0.1. Die blaue Kurve gibt die exakte numerische Lösung an, die rote Kurve die analytische Näherung. 8. Mögliche Erweiterungen des Modells Das Modell berücksichtigt soweit noch nicht die endliche Ausdehnung der Kugel. Es ist vielmehr stillschweigend von einem mathematischen Massepunkt ausgegangen worden. Bei endlicher Ausdehnung besitzt das Teilchen aufgrund seines Trägheitsmomentes auch innere Energie, aus dem Abstand zwischen Auflagepunkt und Scherpunkt ergibt sich ein Drehmoment und die innere Rotation des Teilchens ist mit der Bewegung entlang der Oberfläche über die Rollbedingung gekoppelt. Das Rollen des Teilchens über die Oberfläche bringt eine Rollreibung mit sich, die proportional zur Normalkomponente der Kraft auf die Oberfläche ist, d.h. dem Betrag der Zwangskraft. Natürlich ist auch diese Kraft der Geschwindigkeit entgegengerichtet. Aus dieser Reibung, die an der Kontaktfläche zwischen Teilchen und Oberfläche auftritt, ergibt sich ebenfalls ein Drehmoment. Abschließend sei noch angemerkt, dass sich das Problem auch über den LagrangeFormalismus formulieren lässt. Damit ergibt sich zwar keine einfachere Form der Gleichungen - im Gegenteil, das Ergebnis ist identisch –, doch lassen sich die Gleichungen über einen wohl definierten Formalismus einfacher bestimmen. 9. Zusammenfassung und Schussbemerkung Man erkennt, dass sich ein scheinbar einfaches Problem bei näherer Betrachtung als äußerst komplex erweisen kann. Der Graviationstricher verhält sich allgemein deutlich anders als ein freies Teilchen im Gravitationspotential. Allerdings lässt sich zeigen, dass bei sehr kleiner Reibung die Bewegung wiederum gut durch die klassische Bilanz der Kreisbahn aus Gravitationskraft und Schwerkraft beschrieben ist. Bei mittlerer Reibung gibt diese Lösung immerhin noch die mittlere Bahnkurve gut wieder. Über die Reibung ergibt sich ein Drehmoment, das näherungsweise zu schräg im Trichter liegenden Ellipsenbahnen mit irregulärem Zeitverhalten führt. Durch Einführung normierter Größen lassen sich die verschiedenen in die Gleichung eingehenden Größen auf zwei dimensionslose Parameter reduzieren. Das Modell ist trotz seiner Komplexität noch nicht vollständig. Möglichkeiten zu seiner Erweiterung sind skizziert worden. - 10 - 07.11.2011 10. Anhang: Lösung der Bewegungsgleichung und Darstellung mit Mathematica Mathematica ist eine kommerzielle Software zur Durchführung analytischer und numerischer Berechnungen, die im wissenschaftlichen Bereich weit verbrietet ist. Es gibt auch Software anderer Hersteller wie z.B. Maple oder Mathcad, die ebenfalls diese Möglichkeit bieten. Die numerische Lösung der Bewegungsgleichung kann in Mathematica mittels einer einzigen Zeile erfolgen. Die Berechnung dauert auf einem normalen PC nur den Bruchteil einer Sekunde. Den größten Teil des Codes nehmen Befehle zur Darstellung der Lösung ein. Hier lassen sich die grafischen Möglichkeiten von Mathematica sehr gut ausnutzen. Nachfolgend ist als Beispiel der Code abgedruckt. - 11 - 07.11.2011 - 12 -