Mechanik II Herbst 2010
Werbung

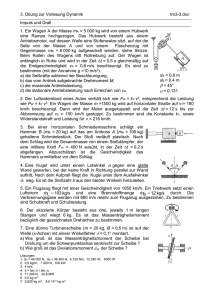
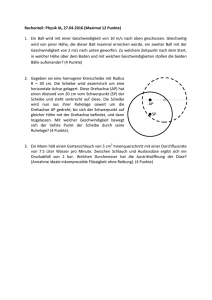
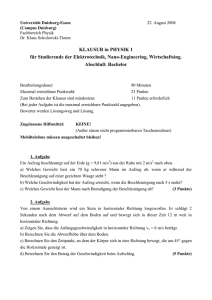
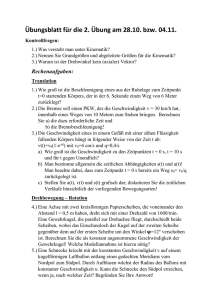
Aufgabe D1 v Ein Fahrzeug verzögert seine Geschwindigkeit mit einer geschwindigkeitsabhängigen Beschleunigung, die durch die im nebenstehenden Diagramm gegebene Parabel beschrieben werden kann. . v0 Geg.: v0 , a1 mit a1 < 0 , v2 mit 0 < v2 < v0 0 a1 0 a Ges.: Bestimmen Sie a) die Zeit τ , nach der sich die Geschwindigkeit auf die Hälfte des Anfangswertes v0 reduziert hat, b) das Weg-Zeit-Gesetz s(t) und die Strecke sτ = s(τ ), die das Fahrzeug in der Zeit τ zurückgelegt hat, c) den Sicherheitsabstand, der beim Beginn des Bremsen nötig ist, um durch den Bremsvorgang gerade nicht auf ein mit konstanter Geschwindigkeit v2 vorausfahrendes Fahrzeug aufzufahren! ∫ Hinweis: √ 2 √ 1 dx = − 1 − c1 x + const c1 1 − c1 x Aufgabe D2 Eine homogene Scheibe 1 mit Masse m1 und Trägheitsmoment JS1 ist in ihrem Schwerpunkt im Gelenk A drehbar gelagert und bei B mit einem Balken der Masse m2 und dem Trägheitsmoment JS2 gelenkig verbunden. Zum Zeitpunkt t = 0 wird das System aus der skizzierten Ruhelage im Schwerefeld der Erde losgelassen. Annahmen: Alle Gelenke seien reibungsfrei, die Massenverteilung in den Bauteilen homogen. Geg.: b , m1 , JS1 , r , m2 , JS2 , ⃗g m1, JS1 r A g S1 s B x s m2, JS2 S2 b Ges.: Bestimmen Sie für den Zeitpunkt unmittelbar nach dem Loslassen (Zeitpunkt t = 0+ ) a) die Winkelbeschleunigung der Scheibe 1 b) die Winkelbeschleunigung der Scheibe 2 c) die Auflagerkraft bei A, d) die Schnittreaktionen im Balken 2 im Schnitt S: S als Funktion der Koordinate x ! Aufgabe D3 Eine homogene Scheibe mit Masse m und Trägheitsmoment JS ist über eine Feder mit der Federsteifigkeit c und ungespannter Länge x0 einem Dämpfer mit der Dämpfungskonstanten β zwischen zwei feststehenden Wänden W1 und W2 eingebaut. Die Scheibe hat bei B Kontakt mit einer Unterlage, die mit s(t) relativ zu den Wänden oszilliert. Annahmen: Alle Gelenke seien reibungsfrei. Federkraft und Dämpferkraft seien ideal, also der Auslenkung x − x0 bzw. der Geschwindigkeit ẋ proportional. Die Scheibe bewege sich, ohne auf der Unterlage zu rutschen. Geg.: r , m, JS , c, x0 , β , ⃗g , s(t) = s0 sin(Ωt) mit s0 , Ω g m, JS r c β W1 W2 S x s(t) B Ges.: Bestimmen Sie a) die Winkelgbeschleunigung der Scheibe als Funktion von ẍ, s̈ und r (Abrollbedingung), b) die Differentialgleichung der erzwungenen Bewegung der Scheibe, c) die Kreisfrequenz des freien Scheibe-Feder-Dämpfer-Systems ! Musterlösung Mechanik II SS10 Aufgabe D1 11 Punkte a) Mit der Definitionsgleichung a = dt = dv folgt nach Trennung der Variablen: dt √ dv a(v) mit a(v) = a1 1− v v0 (a1 < 0) Integration liefert: ∫τ ′ v∫0 /2 dt = τ = v0 t=0 dv 2v0 √ =− v a1 a1 1 − v0 √ v 1− v0 v0 /2 v0 √ = 2 − a1 v0 b) Das Weg-Zeit-Gesetz erhält man √ zum Beispiel durch Integration der Defintionsgleichung 2v0 v(t) ds = v(t) dt. Laut a) gilt t = . Dies nach v(t) umgestellt und integriert liefert 1− − a1 v0 ( s(t) − s0 = v0 t 1 − Damit wird s(τ ) = 1 ( a1 )2 2 ) t 3 2v0 1 v02 √ 2. 3 − a1 Alternativ leifert ein Ansatz mit der Beziehung ds = ! mit s(t0 ) = s0 = 0. v dv dieselbe Lösung. a(v) c) Minimaler Sicherheitsabstand ( 1 ( a 1 )2 2 ) ts zurück, 3 2v0 in der das vorausfahrende Fahrzeug die Strecke s2 = v2 ts zurücklegt. Sollen sie sich nicht berühren, unterscheidet sich die Strecken um den Sicherheitsabstand ss und die Fahrzeuge haben die gleiche Geschwindigkleit v2 . Dies sind zwei Gleichungen für die beiden unbekannten ts und ss . Das gebremste Auto legt in der Zeit ts die Strecke s1 (ts ) = v0 ts 1 − ( s1 (ts ) = s2 (ts ) + ss → v 0 ts 1 − v1 (ts ) = v2 → v0 − 1 ( a 1 )2 2 ) ts − v2 ts = ss 3 2v0 a21 2 t = v2 4v0 s (1) (2) Aufgabe D2 25 Punkte a) Drallsatz für Scheibe 1: JS1 φ̈1 = −Bx r m2 a2x = −Bx Schwerpunktsatz Balken 2: Freischnitt Scheibe 1 (1) (2) Euler: ⃗a2 = ⃗aB + ⃗aS2 ,B G1 Ax in x-Richtung: a2x = aBx − aS2 ,Bx b 2 φ̇7 = 0 folgt: = 2 2 a2x = −rφ̈1 1 ϕ1, ϕ1 0 mit aBx = −rφ̈1 und aS2 ,Bx 1 Ay By Bx (3) Freischnitt Balken 2 Aus (1), (2) und (3) folgt: φ̈1 = 0 a2y By ϕ2, ϕ2 Bx G2 1 b) Drallsatz für Balken 2: JS2 φ̈2 = −By Schwerpunktsatz Balken 2: b 2 Kinematik Balken 2 1 aBy Euler: ⃗a2 = ⃗aB + ⃗aS2 ,B in y-Richtung: a2y = aBy − aS2 ,By a2y aBx aS2,Bx 0 b 2 7 mit aBy = r φ̇ φ̈2 = 0 folgt: 1 = 0 und aS2 ,By = 2 Aus (4), (5) und (6) folgt: (6) aBy B =0 m2 g b/2 φ̈2 = JS2 + m2 b2 /4 1 Mb aBx=0 L x JS2 JS2 + m2 b2 /4 Ax = −Bx = 0 = 0 = Ay − G1 + By , By = m2 g m1 aS1 x = 0 = Ax + Bx , a2x aS2,By Freischnitt B.-Teilstück c) Schwerpunktsatz in x- und y-Richtung: m1 aS1 y a2x (4) m2 a2y = −By − G2 (5) b a2y = − φ̈2 2 1 d) Schnittreaktionen: m2 (b − x) b−x 2 ã2x = −L , ã2x = (x + ) φ̇2 = 0 b 2 m2 (b − x) m2 (b − x) b−x ã2y = −Q − g , ã2y = (x + ) φ̈2 b b 2 b−x (b − x)3 J2 φ̈2 = +Mb − Q , J2 = JS2 2 b3 ϕ 2 , ϕ2 Q ~ a2y 1 a~2x G2(b-x)/b Kontrolle bei x = 0: √ b ã2x = ( ) φ̇22 = 0 2 √ b = −Q − m2 g = −By − m2 g , ã2y = ( ) φ̈2 2 √ b = +Mb − Q , J2 = JS2 2 m2 ã2x = m2 ã2y J2 φ̈2 −L = Bx , Kontrolle bei x = b: 0 = −L 0 = −Q 0 = +Mb √ √ √ Aufgabe D3 13 Punkte a) Euler: ⃗aS = ⃗aB + ⃗aS,B ϕ, ϕ G in x-Richtung: aSx = ẍ , aBx = s̈ , aS,Bx = rφ̈ ⇒ φ̈ = S FF ẍ − s̈ r x, x FR 1 1 1 aB,Sx s R N b) Drallsatz für Scheibe um den Schwerpunkt: JS φ̈ = +R r Schwerpunktsatz für Scheibe in x-Richtung: m ẍ = −FF − FR − R Federkraft: FF = c(x − x0 ) Dämpferkraft: FR = β ẋ Mit der neuen Koordinate ξ = x − x0 von der statischen Ruhelage aus gemessen folgt wegen ξ˙ = ẋ , ξ¨ = ẍ: (m + JS /r2 ) ξ¨ + β ξ˙ + c ξ = JS /r2 s0 Ω2 sin(Ωt) c) Kreisfrequenz des freien Scheibe-Feder-Dämpfer-Systems: Homogene D’gl: (m + JS /r2 ) ξ¨ + β ξ˙ + c ξ = 0 Der Lösungsansatz x = C exp(λt) liefert die Charakteristische Gleichung: λ2 + β c λ+ =0 2 m + JS /r m + JS /r2 β Die Eigenwerte lauten λ1,2 = − ± 2(m + JS /r2 ) sich eine Schwingung einstellt, falls √ √ β2 c − , so dass 4(m + JS /r2 )2 m + JS /r2 √ β2 c − = iω 2 mit i = −1 2 2 2 4(m + JS /r ) m + JS /r √ Die Eigenkreisfrequenz des gedämpften Schwingers ist daher: ω = β2 c − m + JS /r2 4(m + JS /r2 )2 1