Aufgabe ¨UD1 Ein Fahrzeug der Masse m bewegt sich mit der
Werbung

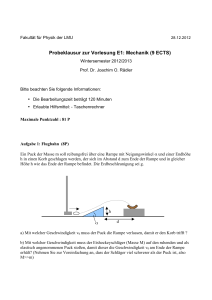
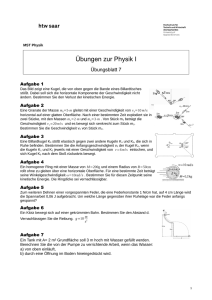
Aufgabe ÜD1 Ein Fahrzeug der Masse m bewegt sich mit der geschwindigkeitsabhängigen Beschleuni√ gung a = v/k entlang der s-Achse. Zur Zeit t = 0 passiert der Wagen den Ort s0 mit der Geschwindigkeit v0 . √ v Geg.: m , s0 , t1 , v0 , a = mit k = const k g v0 0 s0 s1 Ges.: a) die Dimension der Konstanten k, b) die Geschwindigkeit als Funktion der Zeit: v = v(t), √ c) die Stelle s = s1 , die der Wagen zur Zeit t = t1 = 2k v0 erreicht, d) seine Beschleunigung an der Stelle s = s1 , e) die Leistung des Motor an der Stelle s = s1 ! s Aufgabe ÜD2 Eine quadratische Scheibe mit Masse m1 und Trägheitsmoment JS1 ist im Gelenk C mit einem Balken mit Masse m2 und Trägheitsmoment JS2 verbunden. Der Balken ist seinerseits bei D gelenkig mit der Decke verbunden. Zum Zeitpunkt t = 0 wird das System aus der skizzierten Ruhelage losgelassen. Annahmen: Die Bauteile 1 und 2 besitzen eine homogene Masseverteilung und seien starr. Alle Gelenke seien reibungsfrei. 3 m1 , JS2 , ⃗g 2 Geg.: b , m1 , JS1 , m2 mit m2 = D b g m2, JS2 S2 m1, JS1 b/2 s s S1 b/2 C b Ges.: Bestimmen Sie für den Zeitpunkt unmittelbar nach dem Loslassen (Zeitpunkt t = 0+ ) a) den kinematischen Zusammenhang zwischen der Schwerpunktsbeschleunigung ⃗as1 der Scheibe und den Winkelbeschleunigungen von Scheibe und Balken, b) Freischnitte für Scheibe 1 und Balken 2, c) das Verhältnis der Winkelbeschleunigungen von Scheibe und Balken, d) die Schnittreaktionen im Balken bei S: S! Aufgabe ÜD3 Der in der Ruhelage dargestellte Schwinger besteht aus einer schweren Kreisscheibe der Masse M , die an einer Feder der Federsteifigkeit c drehbar hängt. Über die Scheibe ist ein Seil gelegt, welches eine zweite Masse m trägt. Annahmen: Die Massenverteilung der Kreisscheibe ist homogen. Gelenke seien reibungsfrei. Das Seil sei dehnsteif, Seil und Feder seien masselos. Zwischen Seil und Rolle sei kein Schlupf. Geg.: M , JS , r , m , c c M JS A r m v0 B Ges.: Bestimmen Sie a) die Kompatibilitätsbedingung zwischen den Beschleunigungen der Masse m und des Aufhängepunktes A als Funktion der Winkelbeschleunigung der Scheibe, b) die Differentialgleichung der Bewegung für die Masse m, c) die Lagerreaktion am Lager B als Funktion der Winkelstellung der Scheibe, d) die Lösung der Bewegungsgleichung, wenn die Masse m in der gezeichneten Ruhelage die Anfangsgeschwindigkeit ⃗v0 erhält! Musterlösung Übungsklausur Mechanik II SS11 Aufgabe D1 a) dv =a dt dv dt = k 1/2 v ⇒ C0 aus Anfangsbedingung: t = 0 : ⇒ v = v0 ( v= ∫ t=k 1/2 ⇒ √ t + v0 2k dv = 2kv 1/2 + C0 1/2 v C0 = −2kv0 )2 b) ds =v dt ⇒ ds = vdt ∫ ( s= √ t + v0 2k C1 aus Anfangsbedingung: t = 0 : 2k s = s0 + 3 ⇒ )2 s= vdt = ( √ 2 t dt = k + v0 3 2k s = s0 [( ⇒ √ t + v0 2k s1 = s(t1 ) = s0 + c) ∫ ( ∫ √ t + v0 2k )2 )3 + C1 3/2 C1 = s0 − 2/3 k v0 )3 − √ ] v0 3 2k √ 3 7 v0 3 √ v1 = v(t1 ) = 4 v0 2 = 4v0 √ √ 2 v0 v1 a1 = a(t1 ) = = = 2a(0) k k d) Leistung: P = F⃗ · ⃗v ⇒ √ √ √ P1 = ma1 v1 = m2 v0 /k 4( v0 )2 = 8m/k v0 3 dt Aufgabe D2 a) Euler: ⃗aA = ⃗aB + ⃗aA,B , ⃗aC = ⃗aB + ⃗aC,B Komponenten in y-Richtung: 0 FF aAy = aBy + rφ̈ 0 aCy = aBy + 2rφ̈ ⇒ A C aCy = 2aAy aCy ϕ aAy B aBy SB b) m am = −SC M aM = SC + SB − F F = JS φ̈ ⇒ ( mit SC am = aCy statische Ruhelage bei y = 0 M am , 2 yC mit FF = c yA = c 2 am = (SC − SB ) r = JS 2r JS M ym + 2m + 2 ) am = −FF = −c 2 2r 2 √ Eigenkreisfrequenz: ω0 = y m am=aCy mit am = ÿm c JS /r2 + M + 4m c) Lösungsansatz: ym = y0 cos(ω0 t − ψ) Anfangsbedingungen: ⇒ t=0: ym = 0 t=0: ẏm = v0 = −y0 ω0 sin(−π/2) = y0 ω0 , SC ψ = π/2 ⇒ y0 = v0 /ω0 Die Lösung lautet: ym = v0 /ω0 cos(ω0 t − π/2) = v0 /ω0 sin(ω0 t) Aufgabe D3 a) Dy Dx ⃗aS1 = ⃗aC + ⃗aS1 ,C ϕ1, ϕ1 G1 √ Geometrie: sin φ1 = cos φ1 = 1/2 2 Momentane Lage: φ̇1 = φ̇2 = 0 aS1n aS1t aCn ϕ 1 aS,C n aS,Ct a ϕ2, ϕ2 Ct Tangentialkomponente: Cx G2 Cy 0 aS1t = − aCn sin φ1 − aCt cos φ1 + aS1,Ct = = −2bφ̈2 √ φ̈1 1√ b√ 2+ 2φ̈1 = b 2 ( − φ̈2 ) 2 2 2 Normalkomponente: aCn Cx s aCt 0 0 aS1n = − aCn cos φ1 + aCt sin φ1 + aS1,Cn = √ = b 2φ̈2 L Mb Cy Q s aS’n aS’t Cx G‘ Cy b) Kinetische Beziehungen Scheibe: Drallsatz um S1 und Schwerpunktsatz in tangentiale und normale Richtung Balken: Drallsatz um D JS1 φ̈1 = (Cx − Cy ) b/2 m1 aS1t (1) √ √ = (−Cx + Cy + G1 ) 2/2 = m1 b 2 (φ̈1 /2 − φ̈2 ) √ √ m1 b 2 φ̈2 = (Cx + Cy + G1 ) 2/2 (2) (3) JD φ̈2 = −Cx 2b (4) Dies sind vier Gleichungen für vier Unbekannte. Aus (2) und (3) lässt sich Cy eliminieren. Mit der erhaltenen Gleichung und Gleichung (4) folgt für das Verhältnis der Winkelbeschleunigungen: JD + 4m1 b2 1/3m2 b2 + m2 b2 + 4m1 b2 φ̈1 = = φ̈2 m 1 b2 m1 b2 m2 =3/2m1 = 6 c) Aus Unterpunkt b) seien Cx , Cy sowie φ̈1 , φ̈2 gegeben. Dann folgt für den Freischnitt des Balkenabschnitts von S : S bis C: 0 = L − G′ + Cy ⇒ 1 L = m 2 g − Cy 4 = − (JS ′ 2 + 3 1 1 m2 ( + )b φ̈2 = −Q − Cx 4 2 4 JS ′ 2 φ̈2 = −Cx ⇒ b b + Q − Mb 2 2 b Mb = (Q − Cx ) − JS ′ 2 φ̈2 2 7 m2 b2 ) φ̈2 − Cx b 32 mit JS ′ 2 = 1/48 m2 b2 Hinweis: Die Lösung lautet für Cx , Cy sowie φ̈1 , φ̈2 : Cx = − φ̈1 = g b m1 g 6 , Cy = − , φ̈2 = m1 g 2 1g 6b