Zeitabhängige elektromagnetische Felder
Werbung

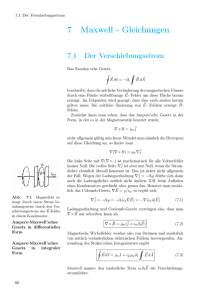
K APITEL X Zeitabhängige elektromagnetische Felder Im Gegensatz zu den stationären Fällen der Elektro- und Magnetostatik sind das elektrische und das magnetische Feld im allgemeineren zeitabhängigen Fall miteinander gekoppelt. Diese Kopplung wird durch zusätzliche Terme in den Grundgleichungen berücksichtigt, die zu neuen Phänomenen führen (Abschn. X.1). In Abschn. X.2 wird gezeigt, dass sich das elektrische und das magnetische Feld aus elektromagnetischen Potentialen ableiten lassen, die nicht eindeutig bestimmt sind. Darüber hinaus werden Bewegungsgleichungen für diese Potentiale hergeleitet. Dem elektromagnetischen Feld können noch eine Energie und ein Impuls zugeordnet werden, oder genauer, entsprechende Dichten und Stromdichten (Abschn. X.3), die ziemlich anschaulichen Bilanzgleichungen genügen. Der zweite Teil des Kapitels befasst sich mit Anwendungen der zuvor eingeführten Begriffe und Ergebnisse. Zunächst werden Lösungen zu den Bewegungsgleichungen für die Felder oder Potentiale im Vakuum in Abwesenheit von Quellen untersucht, entsprechend elektromagnetischen Wellen (Abschn. X.4). Dann wird eine allgemeine Lösung der Maxwell-Gleichungen mit Hilfe sogenannter retardierter Potentiale dargelegt, die das elektromagnetische Feld erzeugt durch beliebige Ladungsund Stromverteilungen angibt (Abschn. X.5). X.1 Grundgesetze In diesem Abschnitt werden zuerst die nicht-stationären Maxwell-Gleichungen dargelegt und die Deutung der zeitabhängigen Terme diskutiert (§ X.1.1). Dann werden Bewegungsgleichungen zweiter Ordnung hergeleitet (§ X.1.2), deren Lösung oft einfacher ist. X.1.1 Maxwell-Gleichungen Die schon in Kapitel VII eingeführten zeitabhängigen Maxwell-Gleichungen lauten ~ · E(t,~ ~ r) = 1 ρel.(t,~r) ∇ 0 ~ · B(t,~ ~ r) = 0 ∇ ~ ~ × E(t,~ ~ r) + ∂ B(t,~r) = ~0 ∇ ∂t ~ ~ × B(t,~ ~ r) − 0 µ0 ∂ E(t,~r) = µ0~el.(t,~r). ∇ ∂t (X.1a) (X.1b) (X.1c) (X.1d) Relativ zu den stationären Gleichungen (VIII.1) und (IX.1) der Elektro- und Magnetostatik treten zwei neue Terme auf, und zwar die Zeitableitungen in den zwei letzten Gleichungen. Natürlich sind diese Zeitableitungen nötig, um eine mögliche Zeitentwicklung der Felder zu beschreiben. 163 X.1 Grundgesetze X.1.1 a Faraday-Induktionsgesetz :::::::::::::::::::::::::::::::::: Schreibt man die Maxwell–Faraday-Gleichung (X.1c) in der Form ~ ~ × E(t,~ ~ r) = − ∂ B(t,~r) , ∇ ∂t (X.2) so kann die Änderung der magnetischen Flussdichte auf der rechten Seite als Quellterm für die Rotation des elektrischen Feldes gesehen werden. Zur Interpretation dieser Gleichung kann man eine feste ruhende Fläche S betrachten und Gl. (X.2) darüber integrieren: Z Z ~ 2 ∂ B(t,~r) 2 ~ ~ ~ ~ (X.3) ∇ × E(t,~r) · d S = − · d S. ∂t S S Da die Fläche zeitunabhängig ist, dann die Zeitableitung auf der rechten Seite aus dem Integral herausgezogen werden: Z ~ Z ∂ B(t,~r) 2 ~ d ~ r) · d2 S~ = d ΦB (t), B(t,~ ·d S = ∂t dt dt S S mit ΦB dem Fluss der magnetischen Induktion durch die Fläche S. Wiederum kann die linke Seite der Gl. (X.3) mit dem Integralsatz von Stokes transformiert werden: wenn ∂S den Rand der Fläche S bezeichnet, gilt I Z 2 ~ ~ r) · d~`, ~ ~ E(t,~ ∇ × E(t,~r) · d S = S ∂S wobei die orthogonalen elementaren Flächenvektoren d2 S~ in Richtung des Daumens der rechten Hand zeigen, wenn die anderen Finger entlang der Richtung von d~` sind. Schließlich ergibt sich I Z d ~ ~ r) · d` = − ~ r) · d2 S~ = − dΦB (t) . E(t,~ B(t,~ (X.4) dt S dt ∂S Wendet man nun dieses Ergebnis auf den Fall an, wo die Fläche S durch einen ruhenden geschlossenen Kreisleiter C aufspannt wird (Abb. X.1), so ist das Kurvenintegral entlang C die sog. elektromotorische Kraft U — die trotz ihrer Bezeichnung keine Kraft ist, sondern eine elektrische Spannung: I ~ r) · d~`. U = E(t,~ C S U C Abbildung X.1 164 Zeitabhängige elektromagnetische Felder Dies entspricht der Energie erhalten durch eine Einheitsladung, wenn sie den Kreis einmal umläuft. (Wird der Kreis irgendwo leicht getrennt, so ist U die elektrische Spannung zwischen den Enden, wie in Abb. X.1 dargestellt wird.) Dann ergibt sich das Faraday-Induktionsgesetz U =− dΦB (t) . dt (X.5) Bemerkungen: ∗ Wenn die Fläche S, durch welche der magnetische Fluss zeitlich variiert, nicht fest ist, müssen zusätzliche Terme in der obigen Argumentation berücksichtigt werden. Physikalisch bleibt das Ergebnis das gleiche. ∗ In einem geschlossenen Kreisleiter wird das induzierte elektrische Feld die Ladungsträger in Bewegung bringen, d.h. es entsteht ein elektrischer Strom. Wiederum wird dieser Strom über die ~ ind. erzeugen, das nach der Lenz’schen (ak) Regel Maxwell–Ampère-Gleichung ein magnetisches Feld B der Änderung des magnetischen Flusses durch die Leiterschleife entgegenwirkt. ∗ Das Prinzip des Induktionsgesetzes wird zu Nutze gemacht, um elektrische Ströme zu erzeugen. X.1.1 b Maxwell’scher Verschiebungsstrom :::::::::::::::::::::::::::::::::::::::::::: Die zweite Modifikation relativ zum stationären Fall ist die Zeitableitung in der Maxwell– Ampère-Gleichung (X.1d), die sich auch als ~ r) ∂ E(t,~ ~ × B(t,~ ~ r) = µ0 ~el.(t,~r) + 0 ∇ (X.6) ∂t schreiben lässt. In dieser Form kann der zweite Term in den eckigen Klammern als eine Ladungsstromdichte interpretiert werden: dieser Term ist der sog. Maxwell’sche Verschiebungsstrom. Dank diesem Term enthalten die Maxwell-Gleichungen (X.1) automatisch die Ladungserhaltung für die Quellen. Leitet man nämlich die Maxwell–Gauß-Gleichung (X.1a) nach der Zeit ab, so ergibt sich ∂ρel.(t,~r) ∂ ~ ~ = 0 ∇ · E(t,~r) . ∂t ∂t Andererseits lautet die Divergenz der Maxwell–Ampère-Gleichung (X.1d) ~ ~ · ~el.(t,~r) = 1 ∇ ~ · ∇ ~ × B(t,~ ~ r) − 0 ∇ ~ · ∂ E(t,~r) = −0 ∂ ∇ ~ · E(t,~ ~ r) , ∇ µ0 ∂t ∂t ~ nach der Zeit und nach den wobei in der zweiten Gleichung die partiellen Ableitungen von E ~ ~ ~ Ortskoordinaten ausgetauscht wurden, während ∇ · ∇ × B = 0 benutzt wurde. Die Summe der zwei letzten Gleichungen lautet dann ∂ρel.(t,~r) ~ + ∇ · ~el.(t,~r) = 0. ∂t (X.7) Diese Differentialgleichung wird als Kontinuitätsgleichung bezeichnet. Sie stellt die lokale Formulierung der Erhaltung der elektrischen Ladung dar. Um die entsprechende Integralform zu finden kann man ein festes Raumgebiet V mit Rand ∂ V betrachten und die Gl. (X.7) über das Volumen V integrieren: Z Z ∂ρel.(t,~r) 3 ~ · ~el.(t,~r) d3~r. d ~r = − ∇ ∂t V V (ak) E. Lenz, 1804–1865 165 X.1 Grundgesetze Da das Volumen V zeitunabhängig ist, kann die Zeitableitung im linken Glied aus dem Integral herausgezogen werden. Währenddessen kann das rechte Glied mit dem Integralsatz von Gauß transformiert werden: Z Z ∂ ~ (X.8) ρel.(t,~r) d3~r = − ~el.(t,~r) · d2 S. ∂t V ∂V Jetzt ist der Term auf der linken Seite die (totale) Zeitableitung der Gesamtladung Qin (t) innerhalb des Volumens V . Das Oberflächenintegral auf der rechten Seite ist der nach außen gerichtete Fluss der Ladungsstromdichte durch Oberfläche ∂ V . Der physikalische Inhalt der Gl. (X.8) ist, dass die Änderung der Gesamtladung Qin pro Zeiteinheit gleich der durch die Oberfläche ∂ V „verlorene“ Ladung pro Zeiteinheit ist — entsprechend genau der Bilanzgleichung für eine erhaltene Größe, nämlich hier die elektrische Ladung. X.1.2 Bewegungsgleichungen für die elektrischen und magnetischen Felder Die Maxwell-Gleichungen (X.1) sind gekoppelte partielle Differentialgleichungen erster Ordnung ~ r) und B(t,~ ~ r). Mit einigen Umrechnungen lassen sich entkoppelte Bewegungsgleichungen für E(t,~ erhalten. ~ r) unabhängig von B(t,~ ~ r), und umgekehrt Somit ist die Differentialgleichung (X.9) für E(t,~ ~ ~ tritt E(t,~r) nicht in der Bewegungsgleichung (X.11) für B(t,~r) auf. Die beiden Felder bleiben aber miteinander gekoppelt, beispielsweise über die Maxwell–Faraday-Gleichung (X.1c). Das heißt, man kann zwar entkoppelte Bewegungsgleichungen finden, die aber nicht unabhängig voneinander sind: physikalisch wird die Kopplung nicht aufgehoben. X.1.2 a Bewegungsgleichung für das elektrische Feld :::::::::::::::::::::::::::::::::::::::::::::::::::::: Die Rotationsbildung der Maxwell–Faraday-Gleichung (X.1c) ergibt ~ ~ × E(t,~ ~ r) + ∇ ~ × ∂ B(t,~r) = ~0. ~ × ∇ ∇ ∂t ~ × ∇ ~ ×V ~ =∇ ~ ∇ ~ ·V ~ − 4V ~ transformiert werden. Im Der erste Term kann mit der Identität ∇ zweiten Term können partielle Zeit- und Raumableitung ausgetauscht werden, was zu ~ ∇ ~ · E(t,~ ~ r) − 4E(t,~ ~ r) + ∂ ∇ ~ × B(t,~ ~ r) = ~0 ∇ ∂t ~ ·E ~ unter Verwendung der Maxwell–Gauß-Gleichung (X.1a) durch die Laführt. Dabei kann ∇ ~ ×B ~ mithilfe der Maxwell–Ampèredungsdichte ausgedrückt werden. Währenddessen lässt sich ∇ Gleichung (X.1d) umschreiben. Dies ergibt ~ r) 1~ ∂ ∂ E(t,~ ~ ∇ρel.(t,~r) − 4E(t,~r) + µ0~el.(t,~r) + 0 µ0 = ~0. 0 ∂t ∂t Äquivalent gilt ~ r) ≡ −0 µ0 E(t,~ ~ r) ∂ 2E(t,~ ~ el.(t,~r). ~ r) = µ0 ∂~el.(t,~r) + 1 ∇ρ + 4E(t,~ ∂t2 ∂t 0 (X.9) Dabei ist der d’Alembert (al) -Operator gemäß ≡ −0 µ0 ∂2 +4 ∂t2 definiert.(48) (48) (al) Oft wird der d’Alembert-Operator als das Negative des hier betrachteten Differentialoperators definiert. J. le Rond D’Alembert, 1717–1783 (X.10) 166 Zeitabhängige elektromagnetische Felder X.1.2 b Bewegungsgleichung für das magnetische Feld :::::::::::::::::::::::::::::::::::::::::::::::::::::::: Betrachtet man als Anfangspunkt die Maxwell–Ampère-Gleichung (X.1d) und bildet man deren Rotation, so ergibt sich ~ ~ × ∂ E(t,~r) = µ0 ∇ ~ × B(t,~ ~ r) − 0 µ0 ∇ ~ × ~el.(t,~r). ~ × ∇ ∇ ∂t ~ ×B ~ wegen der Maxwell–Thomson-Gleichung ∇ ~ ·B ~ einfach gleich −4B. ~ Dann ~ × ∇ Dabei ist ∇ können Ableitungen bezüglich der Zeit- und Ortsvariablen im zweiten Term ausgetauscht werden, ~ E ~ mithilfe der Maxwell–Faraday-Gleichung (X.1c) umgeschrieben und die resultierende Rotation ∇× werden. Insgesamt ergibt sich 2~ ~ r) + 0 µ0 ∂ B(t,~r) = µ0 ∇ ~ × ~el.(t,~r), −4B(t,~ ∂t2 d.h. 2~ ~ r) ≡ −0 µ0 ∂ B(t,~r) + 4B(t,~ ~ r) = µ0 ∇ ~ × ~el.(t,~r). (X.11) B(t,~ ∂t2 ~ und (X.11) für die magnetische Induktion B ~ sind Die Gleichungen (X.9) für das elektrische Feld E anscheinend entkoppelte (inhomogene) lineare partielle Differentialgleichungen zweiter Ordnung. Die Felder sollen aber noch der Maxwell–Faraday-Gleichung (X.1c) genügen, so dass sie nicht unabhängig voneinander sind: die Bewegungsgleichungen (X.9) und (X.11) sind also eigentlich redundant. X.2 Elektrodynamische Potentiale Wie im stationären Fall können ein Skalar- und ein Vektorpotential eingeführt werden, aus denen sich das elektrische und das magnetische Feld ableiten lassen (§ X.2.1). Im Gegensatz zu den stationären ~ und B ~ vom Vektorpotential ab. Dementsprechend sind Potentialen hängen aber jetzt beide Felder E die Eichtransformationen der Potentiale, welche die elektromagnetischen Felder invariant lassen, nicht unabhängig voneinander, sondern beide Potentiale müssen gleichzeitig transformiert werden (§ X.2.2). Schließlich werden in § X.2.3 Bewegungsgleichungen für die Potentiale dargelegt, die aus den Maxwell-Gleichungen folgen. X.2.1 Definition X.2.1 a Vektorpotential ::::::::::::::::::::::: Die Maxwell–Thomson-Gleichung (X.1b) hat die gleiche Form, wie im stationären Fall der Ma~ r) gnetostatik. Daher kann man wie in § IX.1.1 die Existenz eines differenzierbaren Vektorfeldes A(~ folgern, mit dem die Beziehung ~ r) = ∇ ~ × A(t,~ ~ r) B(t,~ (X.12) ~ r) ist das (elektrodynamische) Vektorpotential . in jedem Punkt ~r und zu jeder Zeit t erfüllt wird: A(t,~ ~ r). Ist Ähnlich wie in der Magnetostatik existiert eine (Eich)Freiheit in der Auswahl von A(t,~ ~ ~ ein erstes Vektorpotential A für eine bestimmte magnetische Induktion B geeignet, dann so ist das ~ 0 (t,~r) ≡ A(t,~ ~ r) + ∇χ(t,~ ~ Vektorfeld A r), wobei χ(t,~r) eine beliebige skalare Funktion von Zeit und Ort ist. X.2.1 b Skalarpotential ::::::::::::::::::::::: Setzt man die Beziehung (X.12) in die Maxwell–Faraday-Gleichung (X.1c) ein, so kommt ~ × E(t,~ ~ r) + ∂ ∇ ~ × A(t,~ ~ r) = ~0. ∇ ∂t 167 X.2 Elektrodynamische Potentiale Nach Austauschen der Zeit- und Ortsableitungen im zweiten Term kann man einfacher ~ r) ∂ A(t,~ ~ ~ ∇ × E(t,~r) + = ~0. ∂t schreiben. Daraus folgt, dass es ein skalares Feld Φ(t,~r) existiert, das (elektrodynamische) Skalarpotential , das die Beziehung ~ r) ∂ A(t,~ ~ r) = −∇Φ(t,~ ~ E(t,~ r) − ∂t (X.13) zu jeder Zeit t und in jedem Punkt ~r erfüllt. Im stationären Fall findet man die Beziehung (VIII.3) zwischen elektrostatischem Potential und Feld wieder. X.2.2 Eichinvarianz X.2.2 a Eichtransformationen ::::::::::::::::::::::::::::: ~ und A ~0 ≡ A ~ + ∇χ ~ führen zwar über die Beziehung (X.12) zum gleichen Zwei Vektorpotentiale A ~ ~ E ~0 magnetischen Feld B; laut der Gl. (X.13) würden sie zu unterschiedlichen elektrischen Felder E, führen. Führt man aber eine gleichzeitige Transformation des Vektor- und des Skalarpotentials, und zwar die Eichtransformation ∂χ(t,~r) , ∂t ~ r) → A ~ 0 (t,~r) ≡ A(t,~ ~ r) + ∇χ(t,~ ~ A(t,~ r), Φ(t,~r) → Φ0 (t,~r) ≡ Φ(t,~r) − (X.14a) (X.14b) ~ r) und wobei die skalare Funktion χ(t,~r) beliebig ist, so bleiben die zwei abgeleiteten Felder E(t,~ ~ r) unverändert. B(t,~ Beispiel: Dem elektromagnetischen Feld bestehend aus einem stationären und gleichförmigen elek~ r) = E ~ 0 und einer verschwindenden magnetischen Induktion B(t,~ ~ r) = ~0 kann trischen Feld E(t,~ man z.B. die einfachen Potentiale ~ 0, Φ(t,~r) = −~r · E ~ r) = ~0, A(t,~ oder Φ0 (t,~r) = 0, ~ 0 (t,~r) = −E ~0 t A ~ 0 t (dazu zuordnen. Eine Funktion χ, die von den ersten zu den zweiten führt, ist χ(t,~r) = −~r · E darf man natürlich eine additive Konstante hinzufügen). X.2.2 b Spezielle Eichungen :::::::::::::::::::::::::::: Die Eichfreiheit kann benutzt werden, um eine Eichung zu benutzen, in welcher einige Gleichungen eine einfachere Form annehmen. Eine erste oft auftretende Wahl ist die Coulomb-Eichung, die durch die Bedingung ~ · A(t,~ ~ r) = 0. ∇ (X.15) ~ und B-Feldern ~ [vgl. Gl. (IX.4)] definiert ist. Bei festen Eist es immer möglich, Potentiale zu finden, die der Coulomb-Eichbedingung (X.15) genügen. 168 Zeitabhängige elektromagnetische Felder ~ Potentiale für ein gegebenes elektromagnetisches Feld. Wenn A ~ die Bedingung (X.15) Seien Φ, A erfüllt, ist der Fall erledigt. Sonst sucht man eine Funktion χ(t,~r) derart, dass die über Gl. (X.14) ~ 0 die Coulomb-Eichbedingung erfüllen. Die Divergenzbildung eichtransformierten Potentiale Φ0 , A ~ ~ lautet der Beziehung (X.14b) zwischen A0 und A ~ ·A ~ 0 (t,~r) = ∇ ~ · A(t,~ ~ r) + ∇ ~ · ∇χ(t,~ ~ ~ · A(t,~ ~ r) + 4χ(t,~r). ∇ r) = ∇ ~ ·A ~ 0 (t,~r) = 0 gilt. Dafür soll man eine Funktion χ finden, die die inhomogene Das Ziel ist, dass ∇ Poisson-Gleichung ~ · A(t,~ ~ r) 4χ(t,~r) = −∇ löst, wobei die rechte Seite eine vorgegebene ist. Laut den Ergebnissen des Abschn. VIII.2 existiert eine solche Lösung immer. 2 Eine andere günstige Eichung ist die Lorenz (am) -Eichung, entsprechend der Bedingung 0 µ0 ∂Φ(t,~r) ~ ~ + ∇ · A(t,~r) = 0. ∂t (X.16) Wir werden in § X.2.3 c sehen, dass sich die Bewegungsgleichung für die Potentiale in der LorenzEichung stark vereinfachen. Ein zweiter Vorteil der Eichung wird auch in § XI.1.2 diskutiert. ~ Die Coulomb- und Lorenz-Eichbedingungen legen die elektromagnetischen Potentiale Φ und A ~ nicht vollständig fest, sondern man kann in beiden Fällen unterschiedliche Paare (Φ, A) finden, welche die zugehörige Bedingung erfüllen. Dies ist trivial der Fall der Coulomb-Eichung, deren Bedingung (X.15) das Skalarpotential frei ~ lässt. Dass auch die Lorenz-Eichung „unvollständig“ ist, lässt sich einfach beweisen. Seien (Φ, A) 0 0 ~ und (Φ , A ) Paare von Potentialen, die der Gl. (X.16) genügen, wobei die gestrichenen Potentiale mit den nicht-gestrichenen über die Beziehungen (X.14) zusammenhängen. Dann gilt ∂Φ0 (t,~r) ~ ~ 0 ∂Φ(t,~r) ~ ~ 0 µ0 + ∇ · A (t,~r) − 0 µ0 + ∇ · A(t,~r) = 0, ∂t ∂t d.h. nach einer einfachen Berechnung ∂ 2 χ(t,~r) + 4χ(t,~r) = χ(t,~r) = 0. (X.17) ∂t2 Diese Differentialgleichung hat nicht-triviale Lösungen — die in § X.4.1 unten diskutiert werden —, so dass die gestrichenen und nicht-gestrichenen Potentiale ungleich sind. − 0 µ0 X.2.3 Bewegungsgleichungen für die elektrodynamischen Potentiale X.2.3 a Bewegungsgleichung für das Vektorpotential Das Einsetzen der Beziehungen (X.12) und (X.13) in die Maxwell–Ampère-Gleichung ergibt unter Berücksichtigung der Formel für die Rotation einer Rotation ~ r) ∂ ∂ A(t,~ ~ × ∇ ~ × A(t,~ ~ r) − 0 µ0 ~ µ0~el.(t,~r) = ∇ − ∇Φ(t,~ r) − ∂t ∂t 2~ ~ ∇ ~ · A(t,~ ~ r) − 4A(t,~ ~ r) + 0 µ0 ∇ ~ ∂Φ(t,~r) + 0 µ0 ∂ A(t,~r) . =∇ ∂t ∂t2 ::::::::::::::::::::::::::::::::::::::::::::::::::::: Nach trivialer Umschreibung lautet dies ~ r) ∂ 2 A(t,~ ∂Φ(t,~r) ~ ~ ~ ~ ~ A(t,~r) ≡ −0 µ0 + 4A(t,~r) = −µ0~el.(t,~r) + ∇ 0 µ0 + ∇ · A(t,~r) . ∂t2 ∂t (am) L. Lorenz, 1829–1891 (X.18) X.3 Energie und Impuls des elektromagnetischen Feldes 169 Diese lineare partielle Differentialgleichung zweiter Ordnung stellt die Bewegungsgleichung für das ~ r) dar. Vektorpotential A(t,~ Bemerkung: Im zeitunabhängigen Fall vereinfacht sich Gl. (X.18) zur Gleichung (IX.8). X.2.3 b Bewegungsgleichung für das Skalarpotential Setzt man in die Maxwell–Gauß-Gleichung (X.1a) die Beziehung (X.13) ein, so kommt ~ r) ρel.(t,~r) ~ ∂ A(t,~ ∂ ~ ~ ~ = ∇ · − ∇Φ(t,~r) − = −4Φ(t,~r) − ∇ · A(t,~r) 0 ∂t ∂t ::::::::::::::::::::::::::::::::::::::::::::::::::::: oder äquivalent 4Φ(t,~r) = − ρel.(t,~r) ∂ ~ ~ − ∇ · A(t,~r) . 0 ∂t (X.19) Man kann noch 0 µ0 ∂ 2 Φ(t,~r)/∂t2 von beiden Seiten dieser Gleichung abziehen, um die Bewegungsgleichung in eine Form ähnlich der Gl. (X.18) zu bringen: ∂ 2 Φ(t,~r) ∂Φ(t,~r) ~ ~ ρel.(t,~r) ∂ Φ(t,~r) ≡ −0 µ0 − 0 µ0 + 4Φ(t,~r) = − + ∇ · A(t,~r) . ∂t2 0 ∂t ∂t (X.20) Bemerkung: Im stationären Fall vereinfacht sich Gl. (X.20), oder noch einfacher Gl. (X.19), zur Poisson-Gleichung (VIII.4) der Elektrostatik. X.2.3 c Bewegungsgleichungen in speziellen Eichungen ::::::::::::::::::::::::::::::::::::::::::::::::::::::::: Arbeitet man in der durch die Bedingung (X.16) definierten Lorenz-Eichung, so vereinfachen sich die Bewegungsgleichungen (X.18) und (X.20) erheblich, und zwar zu ρ (t,~r) Φ(t,~r) = − el. 0 in Lorenz-Eichung ~ A(t,~r) = −µ0~el.(t,~r). (X.21a) (X.21b) Somit nehmen die Bewegungsgleichungen für die Potentiale die gleiche Form wie solche (X.9), (X.11) ~ und B-Felder ~ für die daraus abgeleiteten Ean.