Diplomarbeit Anke Maerz - Fachbereich | Mathematik
Werbung

Eberhard Karls Universität Tübingen
Mathematik
Der Poincarésche Dualitätssatz
Diplomarbeit
von
Anke Maerz
Betreuer:
Prof. Dr. Frank Loose
Fachbereich:
Algebraische Topologie
Abgabetermin: 22.03.2012
Hiermit erkläre ich, dass ich die vorliegende Diplomarbeit selbstständig angefertigt habe. Die Konzepte und Ideen orientieren sich hauptsächlich an [Hat02]. Darüber hinaus
beruht die Arbeit teils ausdrücklich, teils implizit auf den angegebenen Quellen. Andere
Quellen habe ich nicht verwendet.
Tübingen, den 22.03.2012
Danksagung
In erster Linie gilt mein Dank Prof. Dr. Frank Loose, der diese Arbeit mit viel Engagement und Freundlichkeit betreut hat.
Darüber hinaus danke ich Dipl.-Math. Dhia Mansour und Dipl.-Math. Johannes Spielmann für die Hilfe im Umgang mit dem Vektorgrafikprogramm Inkscape.
Für die fachliche Unterstützung bedanke ich mich vor allem bei Katharina Radermacher
und Pirmin Vollert, weil sie diese Arbeit gelesen haben, außerdem bei Achim Krause und
Dipl.-Math. Christopher Nerz, auf deren Wissen ich immer wieder zurückgreifen durfte,
sowie bei Dipl.-Math. Markus Klein und Johanna Woye für deren Hilfsbereitschaft in
organisatorischen Fragen.
Ein weiterer Dank gilt meinen Kommilitonen Katharina, Chris, Markus, Max, Franzi,
Bici, Julian, Helmut und den vielen anderen, mit denen ich echte Gemeinschaft und
immer wieder auch Momente gegenseitiger geistiger Befruchtung erleben durfte.
Von ganzem Herzen danke ich meiner Familie, die nicht nur diese Arbeit gelesen hat,
sondern mir auch sonst in jeglicher Hinsicht uneingeschränkte Unterstützung, Bewunderung und Verständnis für manches Chaos entgegenbringt.
Insbesondere danke ich meinem Mann für jeden einzelnen Tag.
Inhaltsverzeichnis
1. Einführung
2. Topologische Grundlagen
2.1. Homologie . . . . . . .
2.2. Kategorientheorie . . .
2.3. Werkzeuge . . . . . . .
2.4. Das Extensionsprodukt
2.5. Cohomologie . . . . . .
2.6. Das Cup-Produkt . . .
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3. Orientierung auf Mannigfaltigkeiten
3.1. Topologische Mannigfaltigkeiten . . . . . . . . .
3.2. Der Orientierungsbegriff . . . . . . . . . . . . .
3.3. Die Fundamentalklasse . . . . . . . . . . . . . .
3.4. Vergleich: Differentialtopologische Orientierung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
18
20
23
24
26
.
.
.
.
29
29
30
38
45
4. Technische Vorbereitungen
47
4.1. Das Cap-Produkt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2. Direkter Limes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3. Cohomologie mit kompaktem Träger . . . . . . . . . . . . . . . . . . . . 53
5. Der Dualitätssatz von Henri Poincaré
56
5.1. Poincaré -Dualität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.2. Beweis der Poincaré-Dualität . . . . . . . . . . . . . . . . . . . . . . . . 58
A. Homologie mit Koeffizienten
A.1. Das Tensorprodukt . . . . . . . . . . . .
A.2. Das Torsionsprodukt . . . . . . . . . . .
A.3. Homologie mit Koeffizienten . . . . . . .
A.4. Singuläre Cohomologie mit Koeffizienten
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
64
64
65
65
66
B. Tieferer Einblick in die Orientierbarkeit von Mannigfaltigkeiten
68
B.1. Orientierbarkeit mit Koeffizienten . . . . . . . . . . . . . . . . . . . . . . 68
B.2. Verallgemeinerte Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . 69
4
C. Grundlagen aus der Differentialgeometrie
C.1. Glatte Mannigfaltigkeiten . . . . . . . .
C.2. Der Tangentialraum . . . . . . . . . . .
C.3. Differentialtopologische Orientierung . .
C.4. Korrespondenz der Orientierungsbegriffe
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
70
70
70
71
72
Abbildungsverzeichnis
i
Glossar
ii
Notationen
iv
Index
vi
Literaturverzeichnis
ix
Zusammenfassung
Die algebraische Topologie beschäftigt sich damit, topologische Räume mit algebraischen
Methoden zu unterscheiden und algebraische Bilder dafür zu finden, wie beispielsweise
Gruppen und Moduln.
Eine wichtige Eigenschaft topologischer Räume ist die Anzahl ihrer n-dimensionalen
„Löcher“ (für eine natürliche Zahl n), denn davon lassen sich auch einige andere Eigenschaften ableiten, wie zum Beispiel Homotopieäquivalenz und Homöomorphie. Um die
Räume nach diesem Kriterium zu sortieren, bieten sich zwei Wege an: Homotopie und
Homologie.
Zunächst ist die Homotopie der anschaulichere Weg, doch wenn man sich eine Zeit lang
mit Homologietheorie beschäftigt hat, wird klar, dass sie in gewisser Weise grundlegender
ist als die Homotopie und einen großen Werkzeugkasten mit sich bringt. Noch mehr
Struktur liefert eine Dualisierung der Homologie: die Cohomologie.
Der Poincarésche Dualitätssatz besagt nun, dass für eine orientierbare, geschlossene
Mannigfaltigkeit M die Anzahl der k-dimensionalen Löcher in M n der Anzahl der (n−k)dimensionalen Löcher in M entspricht, wobei k, n natürliche Zahlen sind. Das ist eine
erstaunliche Aussage, da man üblicherweise keine Beziehungen zwischen verschiedendimensionalen Löchern finden kann.
1. Einführung
Die Mathematik kommt also „durch Konstruktionen“ vorwärts, sie
„konstruiert“ immer verwickeltere Kombinationen.
Indem sie dann durch die Analyse dieser Kombinationen, die man als
selbstständige Gesamtheiten bezeichnen könnte, zu ihren ursprünglichen
Elementen zurückkehrt, wird sie sich der gegenseitigen Beziehungen dieser
Elemente bewusst und leitet daraus die Beziehungen zwischen diesen
Gesamtheiten selbst ab.
(Henri Poincaré, vgl. [Poi04], S. 15 f.)
Dieses Zitat von Henri Poincaré bietet eine sehr schöne Beschreibung der Arbeitsweise
von Mathematikern. Und für kaum ein Gebiet wäre sie wohl zutreffender als für die algebraische Topologie. Hier führen Konstruktionen auf ein sehr abstraktes Niveau, wenn sie
aber erst einmal eingeführt und verstanden sind, lassen sich plötzlich mit beeindruckender Leichtigkeit große Sätze beweisen. Wie sehr Poincaré mit seiner Aussage Recht hat,
zeigt sich auch an der Geschichte seines Dualitätssatzes: In den Jahrzehnten nach Poincarés Tod wurde dieser Satz durch neue Konstruktionen weiter abstrahiert, umformuliert
und dadurch in die moderne algebraische Topologie eingebettet.
Der Poincarésche Dualitätssatz besagt, dass für eine orientierbare, geschlossene Mannigfaltigkeit M die Anzahl der k-dimensionalen Löcher in M n der Anzahl der (n − k)dimensionalen Löcher in M entspricht, wobei k, n natürliche Zahlen sind. Die nötigen
Konstruktionen sind also einerseits Werkzeuge, mit denen Löcher gemessen werden, also
die Konzepte Homologie und Cohomologie, andererseits die Räume, die betrachtet werden, also Mannigfaltigkeiten und Orientierung, sowie weiterhin die Abbildung, die für
diese Räume ein Isomorphismus wird. Wie wichtig diese Konstruktionen sind und wie
leicht im Vergleich dazu der Beweis des Dualitätssatzes ist, zeigt sich auch am Umfang
der einführenden Kapitel.
Erste Begriffsbildung
Um die genauen Definitionen der oben genannten Begriffe geht es in Kapitel 2. Hier
soll zunächst ein erstes Gespür für die Bedeutung des Poincaréschen Dualitätssatzes
entwickelt werden.
Der Dualitätssatz von Henri Poincaré fällt in das Gebiet der algebraischen Topologie.
Die algebraische Topologie beschäftigt sich damit, topologische Räume mit algebraischen
Methoden zu unterscheiden und algebraische Bilder dafür zu finden, wie beispielsweise
7
1. Einführung
Gruppen und Moduln.
Um zwei verschiedene topologische Räume miteinander zu vergleichen, kann man als
Maßstäbe Homotopieäquivalenz, Homöo- und Diffeomorphie anwenden. Manchmal ist
es aber sehr schwer, konkrete Homotopien, Homöo- oder sogar Diffeomorphismen anzugeben. Dann kann man sie auch auf die Anzahl ihrer „Löcher“ hin vergleichen, denn
diese ist unter allen drei Arten von Abbildungen invariant. Um die Räume nach diesem
Kriterium zu sortieren, bieten sich zwei Wege an: Homotopie und Homologie.
Zunächst ist die Homotopie der anschaulichere Weg, doch die höherdimensionalen Homotopiegruppen sind sehr schwierig zu berechnen. Außerdem bringt die Homologietheorie
einen großen Werkzeugkasten mit sich, der sich zumindest teilweise auf die Homotopie
zurück übertragen lässt. In gewisser Weise ist daher die Homologietheorie das grundlegendere Konzept. Noch mehr Struktur liefert eine Dualisierung der Homologie: die
Cohomologie.
Der Dualitätssatz von Poincaré besagt, dass auf orientierbaren, geschlossenen Mannigfaltigkeiten die Anzahl der k-dimensionalen Löcher in M n der Anzahl der (n − k)dimensionalen Löcher in M entspricht, wobei k, n natürliche Zahlen sind. Das ist eine
erstaunliche Aussage, da man üblicherweise keine Beziehungen zwischen verschiedendimensionalen Löchern finden kann.
Mannigfaltigkeiten sind Räume, die lokal sehr einfach sind. Sie sind Hauptgegenstand
von Differentialgeometrie und theoretischer Physik. Orientierbarkeit ist keine starke Einschränkung (wie wir in Kapitel 3 sehen werden). Daher hat Poincarés Dualitätssatz in
diesen Gebieten hohen, praktischen Nutzen.
Henri Poincaré: Das letzte Universalgenie?
Henri Poincaré kommt auf die Welt als Kind einflussreicher französischer Eltern im Jahr
1854, in einem Zeitalter der beginnenden Industrialisierung, als gerade Napoleon III sich
zum Kaiser gekrönt hat. Die Zeit, in der er lebt, ist geprägt von einem großen Wandel, vor
allem als Napoleon III im Jahr 1870 Deutschland unterliegt und im Anschluss Frankreich
zum dritten Mal zur Republik wird.
Es ist eine Zeit voller Veränderungen, in der Worte wie „Zukunft“ und „Entwicklung“
eine wesentliche Rolle spielen und in der das Bürgertum zum ersten Mal in der Geschichte
zur wichtigsten Gesellschaftsschicht wird.
Telegrafie, Eisenbahn und Dampfschifffahrt etablieren sich, Darwin entwickelt seine Evolutionstheorie und die Wissenschaften werden erstmals in Natur-, Ingenieurs-, Geistesund Sozialwissenschaften unterteilt und damit erheblich aufgestockt. Berufe sind nun
für jedermann erlernbar, der Zunftzwang wird aufgehoben.
Auch die Mathematik macht in dieser Zeit große Sprünge, angefangen damit, dass sie sich
überhaupt als eigenständige Wissenschaft betrachtet. Angeregt durch die neue Aufteilung der Wissenschaften entstehen eigene Lehrstühle und Professuren für Mathematik,
vor allem in Deutschland, England und Frankreich. Überall wächst der Wunsch, Ma-
8
1. Einführung
thematik auf ein sicheres Fundament zu stellen. Die Notation spielt plötzlich eine große
Rolle; die Mathematik wird formalisiert.
Das Gebiet der Algebra wächst mit Galois innerhalb weniger Jahrzehnte von einem kaum
wahrgenommenen Randgebiet zu einem mächtigen Instrument, das tieferliegende Strukturen aufdecken und so andere mathematische Teilgebiete miteinander verknüpfen kann.
Cauchy begründet unsere heutige analytische Auffassung von Stetigkeit; Kronecker und
Dedekind etablieren die komplexen Zahlen. Die Differentialgeometrie wird von Gauß und
Riemann begründet und die Geometrie selbst wird um nicht-euklidische Konzeptionen
erweitert. Cantor wirft die Frage auf, ob es mehr als eine Unendlichkeit geben kann und
wird damit zum Begründer der Mengenlehre.
Dies ist nun die Zeit, in der dank Poincaré auch die Geburtsstunde der algebraischen Topologie schlägt. Denn Henri Poincaré wird nicht nur von dieser Zeit beeinflusst, sondern
er trägt maßgeblich zu ihrer Entwicklung bei: Mit 19 Jahren beginnt er sein Mathematikstudium an der École polytechnique, wird bald darauf Schüler von Hermite und
anschließend Dozent in Caen, später an der Sorbonne in Paris.
Außerdem ist er Bergbauingenieur und arbeitet an der internationalen Synchronisierung
der Weltzeit im Bureau des Longitudes. So könnte man ihn sogar als mitverantwortlich
für die heute üblichen Zeitzonen und der Schaltsekunde bezeichnen.
In der Physik ist er flächendeckend tätig, vor allem aber begründet er die spezielle Relativitätstheorie mit. Im Rahmen dessen lernt er auch Einstein kennen, allerdings halten
die beiden nicht viel voneinander, obwohl sie das Genie des jeweils anderen durchaus
erkennen (vgl. [Gal03], S. 314, [Pai82], Kap. 8). Poincarés Genie wird auch von der Öffentlichkeit anerkannt, doch seine Arbeitsweise ist oft unvollständig und ungenau, wie
sowohl Mittag-Leffler als auch andere (vgl. [Mes90], S. 212) anmahnen.
Auch den nach ihm benannten Dualitätssatz, der Gegenstand dieser Arbeit ist, hat
Poincaré nicht exakt und vollständig bewiesen, sondern nur die Grundzüge dargelegt
und die Ausarbeitung anderen überlassen. Davon abgesehen wird heute die PoincaréDualität viel allgemeiner formuliert, mit Konzepten, die zu Poincarés Lebzeiten erst in
Grundzügen zur Verfügung standen und erst 1944 mit Eilenberg voll entwickelt waren
(vgl. [Hat02], S. 131).
Dennoch ist er nach der Herausgabe seiner Schrift „Analysis Situs“ (1895), wie das
Gebiet der Topologie früher hieß, einer der führenden Mathematiker seiner Zeit. Er prägt
den Begriff der Fundamentalklasse, begründet den Begriff der Homologie und formuliert
eine erste, strikte Definition von Mannigfaltigkeiten - eine Begrifflichkeit, die in einer
gröberen Version das erste Mal 27 Jahre zuvor bei Bernhard Riemann aufgetaucht ist
(vgl. [Brü02], S. 103).
Doch auch andere mathematische Bereiche profitieren von seiner Arbeit: Er entwickelt
die Theorie der automorphen Funktionen, ein Modell für eine nicht-euklidische Geometrie und verfasst Beiträge zur algebraischen Geometrie und zur Zahlentheorie. Als
Cantor die Diskussion aufbringt, ob es das Aktual Unendliche gibt oder nicht, versuchen
die Anhänger beider Seiten, Poincaré von ihrem Standpunkt zu überzeugen.
9
1. Einführung
Nicht zuletzt schreibt er einige Werke auf dem philosophischen Gebiet der Erkenntnistheorie, am bekanntesten ist wohl sein Buch „Wissenschaft und Hypothese“ (vgl. [Poi04]),
in dem er unter anderem zu dem Schluss kommt, dass die Mathematik keine echte Naturwissenschaft, sondern eine reine Geisteswissenschaft ist.
Aufgrund der Schaffenskraft auf so vielfältigen Gebieten wird Poincaré heute manchmal als letztes Universalgenie neben Hilbert bezeichnet. Dies ist nicht verwunderlich,
denn wie schon geschildert, ist das 19. Jahrhundert die Zeit, in der sowohl die Anzahl
als auch die Größe der wissenschaftlichen Forschungsgebiete explodiert.
Spätestens ab dem 20. Jahrhundert erscheint es unmöglich, dass ein Mensch noch einen
Überblick über das gesamte Wissen seiner Zeit besitzt.
Überblick über die Kapitel
In Kapitel 2 geht es darum, algebraisch-topologische Grundlagenkenntnisse zu entwickeln. So werden beispielsweise die Ausdrücke von Homologie und Cohomologie erörtert
und auch die Standard-Werkzeuge der algebraischen Topologie bereitgestellt. Diese machen es erst möglich, sich mit dem Thema der Poincaré-Dualität zu befassen.
Kapitel 3 führt den Begriff der algebraisch-topologischen Orientierung auf Mannigfaltigkeiten ein und arbeitet eine Charakterisierung der Homologiegruppen von Mannigfaltigkeiten aus.
In Kapitel 4 führen wir das Cap-Produkt und die Cohomologie mit kompaktem Träger
ein. Beides sind keine Standard-Werkzeuge der algebraischen Topologie, doch für den
Poincaréschen Dualitätssatz unverzichtbar. Denn das Cap-Produkt ist eben die Abbildung, die zur Isomorphie zwischen k-dimensionalen und (n − k)-dimensionalen, dualisierten Löchern führt (für natürliche Zahlen 0 ≤ k ≤ n) und die Cohomologie mit
kompaktem Träger ermöglicht es einerseits, den Dualitätssatz auch für nicht kompakte
Mannigfaltigkeiten zu formulieren und macht darüber hinaus den Beweis der Dualität
erst möglich.
In Kapitel 5 angekommen sind wir nun endlich in der Lage, den Dualitätssatz von
Henri Poincaré zu formulieren und auch zu beweisen - was sich dank der umfangreichen
Vorarbeit überraschend einfach gestaltet.
Anhang A erweitert das Konzept von Homologie und Cohomologie auf allgemeinere
Koeffizienten, sodass wir dann in Anhang B sämtliche Ergebnisse aus Kapitel 3 auch auf
die allgemeinere Version mit beliebigen Koeffizienten übertragen können.
Anhang C liefert schließlich die Grundlagen aus der Differentialgeometrie, die für den
Vergleich der verschiedenen Orientierungsbegriffe in 3 nötig sind.
10
2. Topologische Grundlagen
Dieses Kapitel dient dazu, die nötigen Grundlagenkenntnisse aus dem Gebiet der algebraischen Topologie zu schaffen, die im Rahmen des Grundstudiums Mathematik üblicherweise noch nicht entwickelt wurden.
Einige Begriffe, wie Hausdorffraum, Topologie, Homotopie, Deformationsretrakt werden
als bekannt vorausgesetzt, im Glossar ist aber eine kurze Erläuterung verfügbar.
Der Begriff der Homotopietheorie, der in der Einleitung erwähnt wurde, soll hier nicht
ausführlich erläutert werden, da uns vornehmlich die Homologietheorie interessiert. Wie
bereits dargestellt, stellt die Homotopietheorie eine Alternative dar, um „Löcher“ in
einem Raum zu zählen und je nach Situation ist die eine oder andere Theorie von Vorteil. Zunächst ist die Homotopie der anschaulichere Weg, doch die höherdimensionalen
Homotopiegruppen sind sehr schwierig zu berechnen. Außerdem bringt die Homologietheorie einen großen Werkzeugkasten mit sich, der sich teilweise auf die Homotopie
zurück übertragen lässt. In gewisser Weise ist daher die Homologietheorie das grundlegendere Konzept, das der Homotopie erst ihre vollständige Macht verleiht. Wer an der
Homotopietheorie interessiert ist, möge etwa [SZ94] oder [Hat02] zu Rate ziehen.
2.1. Homologie
2.1.1. Homologie von Kettenkomplexen
Um zur Homologie eines Raumes zu gelangen, führen wir zuerst das algebraische Modell
des Kettenkomplexes ein.
Definition 2.1.1 (Kettenkomplexe). Sei C = (Ck )k∈Z eine Familie abelscher Gruppen mit Ck = 0 (für k < 0) und ∂ = (∂k : Ck → Ck−1 )k∈Z eine Familie von Gruppenhomomorphismen, wobei für alle k ∈ Z die Eigenschaft
∂k−1 ◦ ∂k = 0,
oder vereinfacht ∂ 2 = 0, erfüllt sei. Dann heißt (C, ∂) ein Kettenkomplex, der Homomorphismus ∂ heißt Randoperator und ein Element c ∈ Ck wird k-Kette von C genannt.
Definition 2.1.2 (Kettenabbildung). Eine Abbildung f zwischen Kettenkomplexen
(C, ∂) und (C ′ , ∂ ′ ), bestehend aus Gruppenhomomorphismen fk : Ck → Ck′ , heißt Kettenabbildung genau dann, wenn für alle k ∈ Z gilt:
∂k′ ◦ fk = fk−1 ◦ ∂k
11
2. Topologische Grundlagen
(vgl. Abbildung 2.1).
.
..
.
Ck+1
/ ..
fk+1
/ C′
k+1
′
∂k+1
∂k+1
Ck
fk
/ C′
k
..
.
/ ...
Abbildung 2.1.: f = (fk )k∈Z ist eine Kettenabbildung, wenn das Diagramm kommutiert.
Definition 2.1.3 (Homologiegruppen). Sei (C, ∂) ein Kettenkomplex und k ∈ Z.
Dann heißt die Untergruppe
Zk (C) := ker(∂k ) ⊆ Ck
die Gruppe der k-Zykeln und
Bk (C) := im(∂k+1 ) ⊆ Ck
die Gruppe der k-Ränder von (C, ∂). Da der Randoperator ∂ 2 = 0 erfüllt, ist Bk (C) eine
Untergruppe von Zk (C). Die Quotientengruppe
Hk (C) := Zk (C)/Bk (C)
heißt dann die k-te Homologiegruppe von (C, ∂).
Folgende Notation für induzierte Abbildungen in der Homologie ist sehr gebräuchlich:
Für eine Kettenabbildung f : C → C ′ nennen wir für alle k ∈ Z den Homomorphismus
f∗ : Hk (C) → Hk (C ′ ) mit f∗ ([z]) := [fk (z)] den von f induzierten Homomorphismus in
der Homologie.
Die folgenden Begriffe der Exaktheit, der Spaltung und der Ausschneidung tauchen in
der Algebraischen Topologie ständig auf und werden auch für den Beweis der PoincaréDualität benötigt. Daher werfen wir hier einen Blick auf ihre Definition:
12
2. Topologische Grundlagen
Definition 2.1.4 (Exaktheit). Sei I ⊆ Z ein endliches oder unendliches Intervall,
(Aq )q∈I eine Familie abelscher Gruppen und seien (fq : Aq → Aq−1 ) Gruppenhomomorphismen (wobei q, (q − 1) ∈ I). Die Folge von Paaren (Aq , fq )q∈I heißt exakte Sequenz,
wenn die Gleichung
im(fq+1 ) = ker(fq )
erfüllt ist für alle q ∈ I mit (q − 1), (q + 1) ∈ I.
Definition 2.1.5 (Spaltung). Eine exakte Sequenz
f
g
0 −→ A −→ B −→ C −→ 0
spaltet, wenn es einen rechtsinversen Homomorphismus r : C → B von g gibt, also
g ◦ r = idC . Der Homomorphismus r heißt dann eine Spaltung der Sequenz.
Mit der Abbildung A ⊕ C → B, (a, c) Ô→ f (a) + r(c) bekommen wir insbesondere eine
Isomorphie B ∼
= A ⊕ C.
2.1.2. Standardsimplexe
Um diese Konstruktion auf beliebige topologische Räume anwenden zu können, führen
wir den Begriff des Simplex ein:
Definition 2.1.6 (Standardsimplexe). Sei k ∈ N0 . Die Punkte
e0 = (1, 0, . . . , 0), e1 = (0, 1, 0, . . . , 0), . . . , ek = (0, . . . , 0, 1)
heißen die kanonischen Einheitsvektoren des Rk+1 . Das abgeschlossene Simplex ∆k mit
den Ecken e0 , . . . , ek heißt das k-dimensionale Standardsimplex:
∆k := {x ∈ Rk+1 | x =
k
Ø
i=0
λi ei mit 0 ≤ λi ≤ 1 und
= {(λ0 , . . . , λk ) ∈ Rk+1 | 0 ≤ λi ≤ 1 und
k
Ø
k
Ø
λi = 1}
i=0
λi = 1}
i=0
Das der Ecke ei gegenüberliegende (k −1)-Seitensimplex von ∆k heißt die i-te Seite ∆ik−1
˙ k ist
von ∆k ; sie besteht aus allen Punkten (λ0 , . . . , λk ) ∈ ∆k mit λi = 0. Der Rand ∆
die Vereinigung all dieser Seiten; er besteht aus allen Punkten (λ0 , . . . , λk ) ∈ ∆k , für die
mindestens eine Koordinate Null ist. Zur Veranschaulichung vergleiche auch Abbildung
2.2.
Definition 2.1.7 (Eckenabbildung).
1. Zu beliebigen Punkten x0 , x1 , . . . , xk ∈ Rn
gibt es genau eine lineare Abbildung f : Rk+1 → Rn mit f (ei ) = xi (für i =
13
2. Topologische Grundlagen
δ10
e2
∆2
∆11
e1
δ11
∆1
e0
e0
∆21
∆01
e1
δ12
Abbildung 2.2.: Die Standardsimplexe in Dimension 1 und 2.
0, . . . , k), nämlich die Abbildung f (λ0 , . . . , λk ) = λ0 x0 + · · · + λk xk . Die Einschränkung von f auf ∆k bezeichnen wir mit [x0 , . . . , xk ] = f |∆k : ∆k → Rn . Ist A ⊆ Rn
ein Teilraum, der die konvexe Hülle der Punkte x0 , . . . , xk enthält, so ist f (∆k ) ⊆
A. Daher kann man [x0 , . . . , xk ] auch als Abbildung [x0 , . . . , xk ] : ∆k → A auffassen. Wir sagen: [x0 , . . . , xk ] ist die von der Eckenabbildung e0 Ô→ x0 , . . . , ek Ô→ xk
induzierte lineare Abbildung von ∆k nach A. Sie ist durch x0 , . . . , xk eindeutig
bestimmt.
i
2. Für k ≥ 1 und 0 ≤ i ≤ k sei δk−1
= [e0 , . . . , ei−1 , ei+1 , . . . , ek ] : ∆k−1 → ∆k
definiert als die lineare Abbildung, die von der Eckenabbildung e0 Ô→ e0 , . . . , ei−1 Ô→
ei−1 , ei Ô→ ei+1 , . . . , ek−1 Ô→ ek induziert wird (hier stehen links die Einheitspunkte
i
im Rk , rechts die im Rk+1 ). Die Abbildung δk−1
bildet ∆k−1 homöomorph und
i
linear auf die i-te Seite ∆k von ∆k ab und heißt die i-te Seitenabbildung von ∆k−1 .
Lemma 2.1.8. Für q ≥ 2 und 0 ≤ k < j ≤ q gilt die Formel
j
j−1
k
k
δq−1
◦ δq−2
= δq−1
◦ δq−2
.
Beweis. Jede der zusammengesetzten Abbildungen bildet die Ecken von ∆q−2 folgendermaßen ab: e0 Ô→ e0 , . . . , ek−1 Ô→ ek−1 , ek Ô→ ek+1 , . . . , ej−2 Ô→ ej−1 , ej−1 Ô→ ej+1 , . . . , eq−2 Ô→
eq . Daraus und aus der Linearität folgt, dass die Abbildungen (auch außerhalb der Basisvektoren) gleich sind.
Proposition 2.1.9 (Eckengleichungen). Für n ∈ N0 gelten die folgenden Gleichungen:
q
[e0 . . . eq ] ◦ δq−1
[e0 . . . eq ] ◦
[eq . . . en ] ◦
[eq . . . en ] ◦
[e0 . . . eq ]
[eq . . . en ]
j
δq−1
0
δn−q−1
i
δn−q−1
=
=
=
[e0
j
δn−1 ◦[e0
. . . eq−1 ]
. . . eq−1 ]
[eq+1 . . . en ]
i+q
= δn−1
◦[e0 . . . eq−1 ]
=
=
i
δn−1
◦[e0 . . . eq ]
i
δn−1
◦[eq−1 . . . en−1 ]
: ∆q−1
→ ∆n , für 0 ≤ q ≤ n,
: ∆q−1 → ∆n für 0 ≤ j < q ≤ n,
: ∆n−q−1 → ∆n , für 0 ≤ q ≤ n,
: ∆n−q−1 → ∆n
: ∆q
: ∆n−q
14
→ ∆n
→ ∆n
für 0 < i ≤ n, 0 ≤ q ≤ n
für 0 ≤ q < i ≤ n,
für 0 ≤ i < q ≤ n.
2. Topologische Grundlagen
Beweis. Die Aussage folgt sofort mit Eckenvergleich wie im Beweis von Lemma 2.1.8.
2.1.3. Singuläre Homologie
Da wir uns nun mit der Notation von Standardsimplexen vertraut gemacht haben, fehlt
nicht mehr viel, bis wir Homologiegruppen auf beliebigen topologischen Räumen verstehen können. Wesentlich ist noch die aus der Algebra bekannte Definition der freien
abelschen Gruppe F (M ) über einer beliebigen Menge M , die im Glossar nachgeschlagen
werden kann. Damit lässt sich nun formulieren:
Definition 2.1.10 (Singuläre Kettenkomplexe). Sei X ein topologischer Raum und
k ∈ N0 . Ein singuläres k-Simplex in X ist eine stetige Abbildung σ : ∆k → X. Der Raum
dieser Abbildungen wird notiert mit
Σk (X) := {σ : ∆k → X stetig}.
Die k-te singuläre Kettengruppe Sk (X) = F (Σk (X)) von X ist die freie abelsche Gruppe,
die von allen singulären k-Simplexen in X erzeugt wird; ihre Elemente heißen singuläre
k-Ketten in X. Wir definieren S∗ (X) := (Sk (X))k∈N0 als die Familie der Kettengruppen.
Man könnte als Indexmenge auch Z zulassen, in diesem Fall setzt man dann Σk (X) := ∅
für k < 0 und es gilt Sk (X) = F (∅) = {0} für k < 0.
Für k ≥ 1 sei der Randoperator der Homomorphismus ∂ = (∂k )k∈Z , wobei ∂k gegeben
sei durch
∂k : Sk (X) → Sk−1 (X),
σ Ô→
k
Ø
i=0
i
) für k ≥ 1,
(−1)i (σ ◦ δk−1
und ∂k = 0 für k = 0. An dieser Stelle geht die algebraische Tatsache ein, dass auf freien
abelschen Gruppen ein Homomorphismus f durch sein Verhalten auf einer beliebigen
q
Basis (ei )i∈I eindeutig bestimmt ist. Ein allgemeines Gruppenelement a = rj=1 λj ej
wird unter f folgendermaßen abgebildet:
f (a) =
r
Ø
λj f (ej ).
j=1
Es ist sinnvoll, den Homomorphismus ∂k als Randoperator zu bezeichnen und mit ∂ zu
notieren, weil ∂ 2 = 0 gilt, wie mit 2.1.8 leicht nachzurechnen ist.
Nun können wir von (singulären) Homologiegruppen topologischer Räume sprechen: Da
wir für jedes k ∈ Z eine abelsche Gruppe und einen Randoperator erhalten, bekommen
wir einen Kettenkomplex, wie in Definition 2.1.1 eingeführt.
15
2. Topologische Grundlagen
Für das Arbeiten mit algebraischer Topologie sehr wichtige Homologiegruppen sind die
der Sphären. Für sie gilt:
Beispiel 2.1.11. Für n ∈ N ist
und es gilt
Z
Hk (Sn ) ∼
=
0
Hk (S0 ) ∼
=
für k = 0 und k = n,
sonst,
Z ⊕ Z
0
für k = 0,
sonst.
Ein ausführlicher Beweis ist beispielsweise bei [Mas91] (Theorem VIII.2.1, S. 186) zu
finden.
2.1.4. Relative Homologie
Die relative Homologie, die wir als nächstes betrachten werden, ermöglicht es uns, die
Homologie von Raumpaaren zu betrachten. Wenn beispielsweise die relativen Homologiegruppen eines Raumpaars verschwinden, sind die Homologiegruppen der einzelnen Räume isomorph zueinander. So hilft uns die relative Homologie manchmal, von Teilräumen
auf größere Räume zu verallgemeinern oder liefert uns die Homologie von Teilräumen
als Spezialfall.
Zunächst führen wir eine Notation ein, die im gesamten weiteren Verlauf häufig verwendet wird: Für ein k ∈ N0 und eine stetige Abbildung f : X → Y sei mit Sf = (Sk f ) die
Abbildung S(X) → S(Y ) bezeichnet, die folgendermaßen definiert ist:
Sk f : Sk (X) → Sk (Y ),
σ Ô→ f ◦ σ
für σ ∈ Σk (X).
Definition 2.1.12 (Relativer Kettenkomplex). Sei X ein topologischer Raum und
A ⊆ X ein Teilraum. Dann heißt (X, A) ein (topologisches) Raumpaar. Sei weiter ι :
A ֒→ X die Inklusion. Wir können S(A) vermöge Sι : S(A) ֒→ S(X) als Unterkomplex
von S(X) auffassen. Dann heißt
Sk (X, A) := S(X)/S(A)
mit den Randoperatoren
∂kX,A : Sk (X, A) → Sk−1 (X, A)
c Ô→ ∂kX c
der relative singuläre Kettenkomplex von (X, A).
16
2. Topologische Grundlagen
Sk (A)
∂kA
/ Sk−1 (A)
_
_
∂k−1 ι
∂k ι
Sk (X)
∂kX
/
Sk−1 (X)
πk−1 (X,A)
πk (A)
Sk (X, A)
∂kX,A
/ Sk−1 (X, A)
Abbildung 2.3.: Induzierung des relativen Randoperators
Dazu ist zu bemerken, dass die Randoperatoren ∂ X,A = (∂kX,A ) durch den Homomorphiesatz für abelsche Gruppen induziert werden, vergleiche Abbildung 2.3.
Es folgt dann, dass (S(X, A), ∂ X,A ) auch ein Kettenkomplex ist. Außerdem ist S(X, A)
durch Σk (X, A) := {σ ∈ Σk (X) : im(σ) * A} frei erzeugt, also frei.
Die vorige Notation Sf für eine stetige Abbildung f lässt sich nun von topologischen
Räumen auf topologische Raumpaare erweitern:
Seien (X, A), (Y, B) topologische Raumpaare und f : (X, A) → (Y, B) stetig (d.h. f :
X → Y ist stetig und f (A) ⊆ B). Dann ergibt sich mit dem Homomorphiesatz eine
Kettenabbildung Sf : S(X, A) → S(Y, B). Der Vollständigkeit halber sei erwähnt, dass
diese Kettenabbildung wieder einen Homomorphismus f∗ : H(X, A) → H(Y, B) in der
Homologie induziert.
Definition 2.1.13 (Relative Homologie). Sei (X, A) ein Raumpaar und k ∈ N0 .
Dann heißt
Hk (X, A) := Hk (S(X, A))
die k-te (relative) singuläre Homologiegruppe von (X, A).
Für ein Raumpaar (X, A) gibt es eine lange exakte Homologiesequenz:
∂
ι
π
∂
∗
· · · → Hk+1 (X, A) →∗ Hk (A) →
Hk (X) →∗ Hk (X, A) →∗ . . . .
Ein Beweis findet sich beispielsweise bei [Hat02] (Theorem 2.16, S. 117). Auf dieser
Tatsache beruht das folgende Beispiel:
Beispiel 2.1.14. Für n ∈ N0 ist
Hk (Dn , Sn−1 ) ∼
=
Z
0
für k = n,
sonst
(vgl. [Hat02], Example 2.17, S. 118). Außer der langen exakten Homologiesequenz ist zu
beachten, dass gilt Hk (X) = Hk (X, ∅) (da S(∅) = {0}) und dass definiert ist S−1 := ∅.
17
2. Topologische Grundlagen
2.2. Kategorientheorie
Die Kategorientheorie ist eine allgemeine Theorie von mathematischen Strukturen. Fast
alle gebräuchlichen Theorien lassen sich durch Kategorien beschreiben. Dies ermöglicht
es, Begriffe, Konstruktionen und Ergebnisse aus verschiedenen Teilgebieten der Mathematik auf andere Gebiete zu übertragen.
Wir benötigen die Kategorientheorie, um die Cohomologie einführen zu können.
Definition 2.2.1 (Kategorie). Eine Kategorie C besteht aus
• einer Klasse von Objekten Ob(C)
Ob(C) = {X, Y, Z, . . . },
• einer Menge von Morphismen M or(X, Y )
M or(X, Y ) = {f, g, h, . . . }
für je zwei Objekte X, Y und
• einer Abbildung, Komposition genannt,
M or(X, Y ) × M or(Y, Z) → M or(X, Z)
(f, g) Ô→ gf
für je drei Objekte X, Y, Z.
Dabei muss die Morphismenkomposition assoziativ sein und sowohl ein linksneutrales
als auch ein rechtsneutrales Element haben:
• Für Objekte X, Y, Z, W und Morphismen f ∈ M or(X, Y ), g ∈ M or(Y, Z), h ∈
M or(Z, W ) muss in den Morphismen M or(X, W ) gelten
h(gf ) = (hg)f.
• Für alle Objekte X gibt es ein Element idX ∈ M or(X, X), sodass für alle Objekte
Y und alle Morphismen g ∈ M or(X, Y ), h ∈ M or(Y, X) gilt
gidX = g,
idX h = h.
Dadurch ist dieses Element eindeutig bestimmt und es gilt insbesondere M or(X, X) Ó=
∅ für alle Objekte X.
Beispiel 2.2.2 (Beispiele für Kategorien). Hier nur einige wenige Beispiele für wichtige
Kategorien:
18
2. Topologische Grundlagen
1. EN S: Die Kategorie der Mengen mit ihren Abbildungen und der Komposition von
Abbildungen,
2. T OP: Die Kategorie der topologischen Räume mit den stetigen Abbildungen und
ihrer Komposition,
3. AB: Die Kategorie der abelschen Gruppen mit den Gruppenhomomorphismen und
ihrer Komposition.
4. KK: Die Kategorie der Kettenkomplexe mit den Kettenabbildungen und ihrer
Komposition.
Um nun zwischen verschiedenen Kategorien eine Beziehung herstellen zu können, führen
wir das Konzept des Funktors ein:
Definition 2.2.3 (Ko- und Kontravariante Funktoren). Seien C1 , C2 Kategorien.
Wir notieren einen Funktor T von C1 nach C2 durch T : C1 → C2 und meinen damit eine
Abbildung, die jedem Objekt X ∈ C1 ein Objekt T (X) ∈ C2 und jedem Morphismus
f ∈ M or(X, Y ) in C1 einen Morphismus T (f ) in C2 zuordnet.
Seien X, Y, Z Objekte in C1 , f ∈ M or(X, Y ), g ∈ M or(Y, Z). Dann ist T ein
• covarianter Funktor, wenn
1. T (f ) ∈ M or(T (X), T (Y )),
2. T (idX ) = idT (X) und
3. T (gf ) = T (g)T (f ).
Statt T (f ) wird manchmal auch nur f∗ geschrieben.
• kontravarianter Funktor, wenn
1. T (f ) ∈ M or(T (Y ), T (X)),
2. T (idX ) = idT (X) und
3. T (gf ) = T (f )T (g).
Statt T (f ) wird manchmal auch nur f ∗ geschrieben.
Beispiel 2.2.4. Wir haben bereits zwei kovariante Funktoren kennengelernt:
• den Homologiefunktor Hk : KK → AB und
• den Kettenfunktor S : T OP → KK.
19
2. Topologische Grundlagen
Ein Beispiel für einen kontravarianten Funktor ist der Homomorphiefunktor: Für eine
feste abelsche Gruppe G ist Hom(, G) : AB → AB gegeben durch Hom(A, G) := {ϕ :
A → G|ϕ ist Homomorphismus} für Objekte A ∈ Ob(AB) und durch Hom(f, G) :
Hom(B, G) → Hom(A, G), ϕ Ô→ ϕ ◦ f für Objekte A, B ∈ Ob(AB) und Morphismen
f : A → B. Die Abbildung f ∗ := Hom(f, G) heißt der zu f duale Homomorphismus
und es kommutiert das folgende Diagramm:
f
A
f ∗ϕ
G
/
B
ϕ
Definition 2.2.5 (Natürliche Transformation). Seien C1 , C2 Kategorien und F, G :
C1 → C2 Funktoren. Seien weiter X, Y Objekte in C1 und f ∈ M or(X, Y ) ein Morphismus
in C1 .
Eine natürliche Transformation τ von F nach G ist eine Zuordnung, die jedes Objekt
X ∈ Ob(C1 ) auf einen Morphismus τ (X) ∈ M or(F (X), G(X)) in C2 abbildet, sodass das
folgende Diagramm kommutiert:
F (X)
τ (X)
/ G(X)
F (f )
F (Y )
τ (Y )
/
G(f )
G(Y ).
2.3. Werkzeuge
Im Folgenden lernen wir einige Werkzeuge kennen, die es ermöglichen, mit der Homologie
zu arbeiten. Während Mayer-Vietoris und Ausschneidung, wie auch die Baryzentrische
Unterteilung und das Fünferlemma zu den Standard-Methoden der algebraischen Topologie gehören, wird das Extensionsprodukt erst für den Übergang zur Cohomologie
benötigt und hat einen weit größeren theoretischen Unterbau.
Lemma 2.3.1 (Fünferlemma). Seien G1 , . . . , G5 und H1 , . . . , H5 abelsche Gruppen,
sowie α1 , . . . , α4 , β1 , . . . , β4 und γ1 , . . . , γ5 Gruppenhomomorphismen, sodass die Reihen
20
2. Topologische Grundlagen
des folgenden Diagramms exakt sind und das Diagramm kommutiert:
G1
γ1
H1
α1
β1
α2
/ G2
γ2
/
β2
H2
/ G3
γ3
/ H3
α3
/ G4
β3
γ4
/ H4
α4
/
G5
γ5
β4
/ H5 .
Falls dann γ1 , γ2 , γ4 , γ5 Isomorphismen sind, ist auch γ3 ein Isomorphismus.
Beweis. Ein Beweis des Fünferlemmas findet sich in allen gängigen Büchern über die
algebraische Topologie, unter anderem bei [Hat02] (nach Theorem 2.27, S. 129).
Satz 2.3.2 (Homotopiesatz). Seien X, Y topologische Räume und f, g : X → Y
homotope Abbildungen. Dann sind für k ∈ N0 die induzierten Homomorphismen f∗ , g∗ :
Hk (X) → Hk (Y ) gleich.
Für die relative Homologie gilt analog: für f, g : (X, A) → (Y, B) homotop sind die
induzierten Homomorphismen f∗ , g∗ : Hk (X, A) → Hk (Y, B) gleich.
Beweis. Einen kompletten Beweis des Homotopiesatzes liefert beispielsweise [Hat02]
(Theorem 2.10, S. 111 f.).
Definition 2.3.3 (Schwerpunkt, Unterteilungskette). Für den k-dimensionalen
Standardsimplex ∆k (k ∈ N) heißt
pk :=
1
(e0 + · · · + ek ) ∈ ∆k
k+1
der Schwerpunkt von ∆k und wir definieren die Unterteilungskette uk ∈ Sk (∆k ) durch
u0 := id∆0 ∈ S0 (∆0 )
uk :=
k
Ø
i=0
i
Cpk (Sδk−1
(uk−1 )) ∈ Sk (∆k ),
i
wobei δk−1
die i-te Seitenabbildung von ∆k−1 ist.
Definition 2.3.4 (Baryzentrische Unterteilung). Sei X ein topologischer Raum
und S(X) sein singulärer Kettenkomplex.
Die baryzentrische Unterteilung B X = (BkX )k∈Z auf X ist definiert durch
B X : S(X) → S(X),
σ Ô→ Sk σ(uk ),
für σ ∈ Σk (X) und uk ∈ Sk (∆k ) die Unterteilungskette von ∆k . (Man setzt Bk dann
einfach zu einem Homomorphismus auf Sk (X) fort.)
21
2. Topologische Grundlagen
Beachte, dass BkX (σ) = 0 für k < 0, weil in diesem Fall Σk (X) = ∅ ist.
Satz 2.3.5 (Kleine Ketten). Sei X ein topologischer Raum und seien U, V ∈ X offen
mit X = U ∪ V . Sei weiter k ∈ N0 und c ∈ Sk (X) eine k-Kette in X.
Dann gibt es ein r > 0 und Ketten x ∈ Sk (U ) ⊆ Sk (X), y ∈ Sk (V ) ⊆ Sk (X), sodass
Brc = x + y
für B r := B ◦ · · · ◦ B die r-fache baryzentrische Unterteilung.
Beweis. Einen ausführlichen Beweis des Satzes über kleine Ketten liefert beispielsweise
[Loo10] (Satz 3.2.29, S.165 f.).
Satz 2.3.6 (Ausschneidungssatz). Sei (X, A) ein Raumpaar und U ⊆ A eine Teilmenge mit U ⊆ Å. Weiter sei ι : (X\U, A\U ) ֒→ (X, A) die kanonische Inklusion.
Dann induziert ι in der Homologie einen Isomorphismus
∼
=
ι∗ : H(X\U, A\U ) →
H(X, A).
Beweis. Vergleiche zum Beispiel [SZ94] (Satz 9.4.5, S.229)
Satz 2.3.7 (Mayer-Vietoris). Sei X ein topologischer Raum mit X = U ∪ V für zwei
offene Teilmengen U, V ⊆ X.
Dann existiert eine lange exakte Homologiesequenz abelscher Gruppen:
ν
µ
∆
∆
ν
· · · −→ Hk+1 (X) −→ Hk (U ∩ V ) −→ Hk (U ) ⊕ Hk (V ) −→ Hk (X) −→ . . .
Diese Sequenz heißt Mayer-Vietoris-Sequenz.
Die Abbildungen µ, ν und ∆ werden dabei auf folgende Weise konstruiert:
Seien ι1 : U ∩ V → U , ι2 : U ∩ V → V , j1 : U → U ∪ V und j2 : V → U ∪ V die
kanonischen Inklusionen. Weiter seien c, r, x, y wie in Satz 2.3.5, also es gelte B r c = x+y.
Dann bekommen wir die gesuchten Abbildungen durch
µ:a →
Ô
((ι1 )∗ (a), −(ι2 )∗ (a)),
ν : (a, b) →
Ô
(j1 )∗ (a) + (j2 )∗ (b),
∆ : [c] Ô→ [∂x ].
Damit sind µ, ν und ∆ auch natürliche Transformationen (bei geeigneter Wahl von
Funktoren und deren Kategorien). Ein vollständiger Beweis findet sich bei [Loo10] (Satz
3.2.30, S. 166 ff.).
Wir werden im Beweis der Poincaré-Dualität auch relative Versionen von Mayer-Vietoris
brauchen:
Sei (X, Y ) ein Raumpaar der Form (X, Y ) = (A ∪ B, C ∪ D) mit C ⊆ A und D ⊆ B,
sodass X = Å ∪ B̊ und Y = C̊ ∪ D̊. Dann gibt es eine relative Mayer-Vietoris-Sequenz
Φ
Ψ
∂
· · · → Hn (A ∩ B, C ∩ D) −→ Hn (A, C) ⊕ Hn (B, D) −→ Hn (X, Y ) −→ . . .
wobei Φ, Ψ und ∂ geeignet definiert werden aus µ, ν und ∆ (für eine genauere Konstruktion vgl. beispielsweise [Hat02], S. 152).
22
2. Topologische Grundlagen
2.4. Das Extensionsprodukt
Definition 2.4.1 (freie Auflösung). Sei A eine abelsche Gruppe und F eine beliebige
freie abelsche Gruppe. Eine kurze exakte Sequenz
S:
β
α
0 −→ R −→ F −→ A −→ 0
heißt eine freie Auflösung von A.
Definition 2.4.2 (Standardauflösung). Sei A eine abelsche Gruppe und F die von
A als Menge frei erzeugte abelsche Gruppe, also
F := {ϕ : A → Z | ϕ(a) = 0 für fast alle a ∈ A}.
Sei weiter ι : A ֒→ F die kanonische Inklusion (definiert durch a Ô→ 1 · a). Dann bilden
die Elemente (ι(a))a∈A offensichtlich eine Basis in F . Sei nun π : F → A auf dieser
Basis definiert durch die kanonische Projektion, also π(ι(a)) := a, und dann eindeutig
auf ganz F erweitert.
Schließlich sei R := ker(π) und j : R → F wieder die kanonische Inklusion.
Dann ist
S(A) :
j
π
0 −→ R −→ F −→ A −→ 0
exakt (da π surjektiv ist) und heißt die Standard-Auflösung von A.
Mit der Standardauflösung bekommen wir auf Homomorphieniveau eine exakte Sequenz
j∗
π∗
0 → Hom(A, G) → Hom(F, G) → Hom(R, G).
Wünschenswert wäre, dass auch j ∗ surjektiv ist, was aber nicht immer gilt, weil der
Homomorphiefunktor nur linksexakt ist. Inwiefern die Surjektivität nicht erfüllt ist, misst
das Extensionsprodukt:
Definition 2.4.3 (Extensionsprodukt). Seien A und G abelsche Gruppen und S(A)
die Standardauflösung von A.
Dann ist das Extensionsprodukt Ext(A; G) definiert durch
Ext(A, G) = coker(j ∗ ) = Hom(R, G)/im(j ∗ ),
vergleiche auch Abbildung 2.4.
23
2. Topologische Grundlagen
S(A): 0
R
j
F
A
0
j∗
G
Abbildung 2.4.: Das Extensionsprodukt ist der Cokern der Abbildung j ∗
2.5. Cohomologie
Definition 2.5.1 (Cokettenkomplex). Sei C = (C k )k∈Z eine Familie abelscher Gruppen mit Ck = 0 (für k < 0) und δ = (δ k : C k → C k+1 )k∈Z eine Familie von Gruppenhomomorphismen, wobei für alle k ∈ Z die Eigenschaft
δ k+1 ◦ δ k = 0,
oder vereinfacht (δ)2 = 0, erfüllt sei. Dann heißt (C, δ) ein Cokettenkomplex, der Homomorphismus ∂ heißt Corandoperator und ein Element c ∈ Ck wird k-Cokette von C
genannt.
Definition 2.5.2 (Cokettenabbildung). Eine Abbildung f zwischen Cokettenkomplexen (C, δ) und (C ′ , δ ′ ), bestehend aus Gruppenhomomorphismen f k : C k → C ′k ,
heißt Cokettenabbildung genau dann, wenn für alle k ∈ Z gilt:
δ ′k ◦ f k = f k+1 ◦ δ k .
Aus einem Cokettenkomplex (C, δ) bekommt man einen Kettenkomplex (C∗ , ∂), indem
man Ck := C −k und ∂k := δ −k setzt. So lassen sich die Konstruktionen der Homologie
auf die der Cohomologie übertragen:
Definition 2.5.3 (Cohomologiegruppen). Sei (C, δ) ein Cokettenkomplex und k ∈ Z.
Dann heißt die Untergruppe
Z k (C) := ker(δ k ) ⊆ C k
die Gruppe der k-Cozykeln und
B k (C) := im(δ k−1 ) ⊆ Ck
die Gruppe der k-Coränder von (C, ∂). Da der Randoperator (δ)2 = 0 erfüllt, ist B k (C)
eine Untergruppe von Z k (C). Die Quotientengruppe
H k (C) := Z k (C)/B k (C)
heißt dann die k-te Cohomologiegruppe von (C, δ).
24
2. Topologische Grundlagen
Später (in Abschnitt 2.6) werden wir eine Art neutrales Element in H 0 (X) benötigen:
Wir identifizieren Σ0 (X) mit X und betrachten die Funktion
1åX : S0 (X) → Z,
x Ô→ 1 ∀x ∈ S0 (X).
So erhalten wir das Element 1åX ∈ S 0 (X). Für ein singuläres 1-Simplex σ : ∆1 → X
ergibt die Corandabbildung auf 1åX folgendes:
δ(1åX )(σ) = ∂1∗ (1åX )(σ) = 1åX (∂1 σ) = 1åX (σ(e1 ) − σ(e0 )) = 1åX (σ(e1 )) − 1åX (σ(e0 )) = 0.
Also ist 1åX ein Cozykel. Wenn wir nun 1X := [1åX ] ∈ H 0 (X) definieren, haben wir ein
Element, dass sich unter dem Cup-Produkt (s. Definition 2.6.2) neutral verhält.
Die Cokettenkomplexe mit den Cokettenabbildungen und ihrer Komposition bilden eine Kategorie COKK. Daher kann man H k : COKK → AB als kovarianten Funktor
auffassen. So induziert eine Cokettenabbildung f : C → C ′ einen Homomorphismus
f∗ : H k (C) → H k (C ′ ) in der Cohomologie. Alle Resultate für Kettenkomplexe, wie die
lange exakte Sequenz, der Ausschneidungssatz und Mayer-Vietoris übertragen sich direkt auf Cokettenkomplexe.
Durch Anwenden des Homomorphiefunktors Hom(_, Z) bekommt man aus einem Kettenkomplex einen Cokettenkomplex. Dieser Zusammenhang wird natürliche Paarung
genannt:
Definition 2.5.4 (natürliche Paarung). Sei C := (C, ∂)k ein Kettenkomplex und
Hom(_, Z) mit
Hom(Ck , Z) := {ϕ : Ck → Z | ϕ Homomorphismus}
für alle Ck der bereits bekannte Homomorphiefunktor. Dann bezeichnet (C k , δ k ) :=
∗
(Hom(Ck , Z), ∂k+1
) den zu C gehörigen Cokettenkomplex.
Die natürliche Paarung eines Kettenkomplexes (C, ∂)k und seines zugehörigen Cokettenkomplexes (C, ∂)k ist definiert durch
é·, ·ê : C k × Ck → Z, (ϕ, c) Ô→ ϕ(c).
Beachte, dass im Allgemeinen die Homologie eines Kettenkomplexes C := (C, ∂)k ver∗
schieden von der Cohomologie seines zugehörigen Cokettenkomplexes (Hom(Ck , Z), ∂k+1
)
ist, weil der Homomorphiefunktor nicht exakt ist.
Für eine Kettenabbildung f : C → C ′ ist die Komposition von Hom(_, Z) (kontravariant) mit Hk (kovariant) wieder kontravariant. Daher induziert f einen Homomorphismus
f ∗ : Hk (C ′ ) → Hk (C).
Die singuläre Cohomologie ergibt sich, indem wir Kettenfunktor, Homomorphiefunktor
und Cohomologiefunktor hintereinanderschalten:
H k ◦ Hom(_, Z) ◦ S : T OP → KK → COKK → AB.
25
2. Topologische Grundlagen
Der einfacheren Notation wegen heißt diese Komposition von Funktoren wieder Cohomologiefunktor und wird notiert mit H k . Weiter schreiben wir S k (X) = Hom(Sk (X), Z)
und nennen (S k (X), δ k ) den singulären Cokettenkomplex von X. Analog zur Familie
der Kettengruppen bezeichnen wir die Familie der Cokettengruppen mit S ∗ (X) :=
(S k (X))k∈Z .
Die relative Cohomologie H k (X, A) ergibt sich entsprechend.
Proposition 2.5.5 (Corand-Rand-Formel). Sei (C, ∂)k ein Kettenkomplex und (C k , δ k )
der zugehörige Cokettenkomplex. Für ϕ ∈ C k und c ∈ Ck+1 heißt folgende Gleichung
Corand-Rand-Formel:
éδ k ϕ, cê = éϕ, ∂k+1 cê.
Beweis.
éδ k ϕ, cê =(δ k ϕ)(c)
∗
=(∂k+1
ϕ)(c)
=(ϕ ◦ ∂k+1 )(c)
=ϕ(∂k+1 c)
=éϕ, ∂k+1 cê
(nach Definition von δ k )
∗
(nach Definition von ∂k+1
)
Die Corand-Rand-Formel induziert so eine natürliche Paarung zwischen Cohomologie
und Homologie eines Kettenkomplexes:
é_, _ê : H k (C) × Hk (C) → Z,
é[ϕ], [c]ê := éϕ, cê.
Beachte aber, dass diese Paarung entartet sein kann im Gegensatz zur natürlichen Paarung auf Kettenkomplexniveau.
2.6. Das Cup-Produkt
Definition 2.6.1 (Vorder- und Rückseite von Simplexen). Für 0 ≤ k ≤ n ∈ N
und ein singuläres n-Simplex σ : ∆n → X mit einem topologischen Raum X definieren
die Abbildungen
σ ′ = σ ◦ [e0 . . . ek ] : ∆k → X
σ ′′ = σ ◦ [ek . . . en ] : ∆n−k → X
und
die k-dimensionale Vorderseite und die (n − k)-dimensionale Rückseite von σ. Man
kann sie auffassen als Einschränkungen von σ auf die Seitensimplexe von ∆n , die von
den ersten (k + 1) beziehungsweise den letzten (n − k + 1) Ecken von σ aufgespannt
werden.
26
2. Topologische Grundlagen
Beachte, dass hier die Notationen in der Literatur verschieden sind: was beispielsweise in
dieser Arbeit oder bei [SZ94] [e0 . . . ek ] heißt, wird bei [Hat02] mit [ek . . . en ] bezeichnet
(für 0 ≤ k ≤ n).
Definition 2.6.2 (Cup-Produkt). Sei X ein topologischer Raum, seien ϕ ∈ S k (X)und
ψ ∈ S l (X) Coketten und sei σ : ∆k+l → X ein singuläres Simplex.
Dann ist das Cup-Produkt definiert durch
∪ : S k (X) × S l (X) → S k+l (X),
(ϕ ∪ ψ)(σ) := ϕ(σ ◦ [ek . . . ek+l ])ψ(σ ◦ [e0 . . . ek ]).
Das Cup-Produkt von ϕ und ψ auf einem singulären Simplex σ ist also der Wert von
ψ auf der l-dimensionalen Rückseite von σ, multipliziert mit dem Wert von ϕ auf der
k-dimensionalen Vorderseite von σ.
q
Für eine beliebige Kette c = σ∈Σk+l (X) nσ σ ∈ Sk+l (X) definieren wir durch lineare
q
Fortsetzung (ϕ ∪ ψ)(c) = σ∈Sn (X) nσ ((ϕ ∪ ψ)(c)); das ist möglich, weil Σk+l (X) eine
Basis der frei abelschen Gruppe Sk+l (X) und ϕ∪ψ : Sk+l (X) → Z ein Homomorphismus
ist.
Wir erhalten mit dem Cup-Produkt eine bilineare Abbildung. Andere wünschenswerte
Eigenschaften wie Assoziativität und graduierte Kommutativität sind nicht gegeben.
Um sie zu bekommen, müssen wir das induzierte Cup-Produkt auf Homologieniveau
betrachten, das der Einfachheit halber ebenfalls mit ∪ notiert wird:
∪ : H k (X) × H l (X) → H k+l (X),
[ϕ] ∪ [ψ] := [ϕ ∪ ψ],
(für ϕ ∈ S k (X), ψ ∈ S l (X)). Diese Definition ist wohldefiniert, wie folgende Proposition
zeigt:
Proposition 2.6.3. Sei X ein topologischer Raum, seien ϕ ∈ S k (X)und ψ ∈ S l (X)
Coketten und δ der Corandoperator. Dann gilt:
δ(ϕ ∪ ψ) = δϕ ∪ ψ + (−1)k ϕ ∪ δψ
Beweis. Ein Beweis dieser Proposition findet sich beispielsweise bei [Hat02] (Lemma
3.6, S. 206).
Satz 2.6.4. Das Cup-Produkt ∪ : H k (X) × H l (X) → H k+l (X) hat folgende Eigenschaften:
1. Bilinearität
(a1 α1 + a2 α2 ) ∪ β = a1 α1 ∪ β + a1 α1 ∪ β
α ∪ (a1 β1 + a2 β) = α ∪ a1 β1 + α ∪ a2 β2
für a1 , a2 ∈ Z, α, α1 , α2 ∈ H k (X), β, β1 , β2 ∈ H l (X).
27
2. Topologische Grundlagen
2. Assoziativität
(α ∪ β) ∪ γ = α ∪ (β ∪ γ)
für α ∈ H k (X), β ∈ H l (X), γ ∈ H m (X) (mit k, l, m ∈ N0 ).
3. Das Element 1X ∈ H 0 (X) ist neutral:
1X ∪ α = α,
α ∪ 1X = α
für α ∈ H k (X).
4. Graduierte Kommutativität
α ∪ β = (−1)kl β ∪ α
für α ∈ H k (X), β ∈ H l (X).
5. Natürlichkeit
f ∗ (α ∪ β) = f ∗ (α) ∪ f ∗ (β)
für α ∈ H k (X), β ∈ H l (X), f : X ′ → X, X ′ topologischer Raum und f stetig.
Beweis. Diese Eigenschaften finden sich beispielsweise bei [tD00] (Kapitel X.4, S. 377f.).
28
3. Orientierung auf Mannigfaltigkeiten
Das Wort Orientierung war zur Zeit von Henri Poincaré ein recht neues Wort: sein
Gebrauch im Deutschen ist erst seit dem 19. Jahrhundert belegt.
Die Orientierung spielt in vielen Bereichen des Lebens eine Rolle, wie zum Beispiel in
der Architektur (Ausrichtung eines Gebäudes nach Himmelsrichtungen), in der Biologie
(Fähigkeit der Auseinandersetzung mit der Umwelt) oder in der Fotografie (Lage der
Kamera relativ zum Motiv).
In allen Fällen bedeutet Orientierung aber die Ausrichtung auf einen bestimmten Bezugsrahmen. So auch in der Mathematik, wo der Begriff häufig in Geometrie, linearer
Algebra, Topologie und in Differentialgeometrie auftaucht. Wir werden uns in diesem
Kapitel hauptsächlich mit der algebraisch-topologischen Orientierung auf Mannigfaltigkeiten beschäftigen.
3.1. Topologische Mannigfaltigkeiten
Der Begriff der (topologischen) Mannigfaltigkeit ist ein Begriff, der für viele Teilgebiete
der Mathematik, beispielsweise für die Differentialgeometrie, von zentraler Bedeutung
ist. Das liegt daran, dass n-dimensionale Mannigfaltigkeiten lokal so aussehen, wie unsere
Welt: wie der Rn . Daher sind die meisten Räume, die Physiker, Biologen und andere
„Anwender“ von Mathematik für ihre Modelle benötigen, Mannigfaltigkeiten.
Definition 3.1.1 (Topologische Mannigfaltigkeit). Sei n ∈ N und M ein Hausdorffraum mit abzählbarer Topologie. Dann heißt M eine n-dimensionale (topologische)
Mannigfaltigkeit, oder kürzer n-Mannigfaltigkeit, wenn jeder Punkt x ∈ M eine offene
Umgebung U ⊆ M hat, die homöomorph zu einer offenen Teilmenge V ⊆ Rn ist.
Beachte, dass die offene Teilmenge V auch ganz Rn sein kann.
Im Folgenden trage Rn immer die von der euklidischen Norm induzierte StandardTopologie und seine Teilräume (z.B. Sn ) die Teilraumtopologie, die hausdorffsch ist und
abzählbare Topologie hat. Definiere außerdem durch Dn := {x ∈ Rn | ||x|| ≤ 1} den
abgeschlossenen Einheitsball, wobei || · || die euklidische Norm auf Rn bezeichne. Um das
Innere einer Menge M zu kennzeichnen, schreiben wir M̊ .
Beispiel 3.1.2 (2-Sphäre). Betrachte die 2-Sphäre
S2 := {x ∈ R3 | ||x|| = 1} ⊆ R3 .
29
3. Orientierung auf Mannigfaltigkeiten
Sei x = (x1 , x2 , x3 ) ∈ S2 beliebig. Dann liegt x in mindestens einer der folgenden offenen
Teilmengen von S2 :
U1 := S2 \ (0, 0, 1) oder U2 := S2 \ (0, 0, −1).
Abbildung 3.1 veranschaulicht die Homöomorphie von U1 zu V := R2 .
Also ist S2 eine 2-Mannigfaltigkeit und auch in höheren Dimensionen gilt: Sn ist eine
x3
S2
(x1 , x2 )
Abbildung 3.1.: S2 \ (0, 0, 1) ist homöomorph zu R2 .
(n)-Mannigfaltigkeit.
Definition 3.1.3 (Kompakte Mannigfaltigkeiten). Sei M eine topologische n-Mannigfaltigkeit. M heißt eine kompakte oder geschlossene Mannigfaltigkeit, wenn sie als
topologischer Raum kompakt ist.
Beachte, dass man in der Literatur unter einer geschlossenen Mannigfaltigkeit häufig
eine kompakte Mannigfaltigkeit ohne Rand versteht. In dieser Arbeit werden allerdings
keine berandeten Mannigfaltigkeiten vorkommen, sodass hier jede Mannigfaltigkeit als
Mannigfaltigkeit ohne Rand aufgefasst wird.
Wir sehen in Abbildung 3.2 einige Beispiele für Mannigfaltigkeiten.
3.2. Der Orientierungsbegriff
Zunächst definieren wir den Begriff der Orientierung auf Rn und übertragen ihn dann
auf topologische Mannigfaltigkeiten.
Ein mathematisch sinnvoller Orientierungsbegriff, den wir auch im nicht-mathematischen
Alltag antreffen, ist der „Uhrzeigersinn“: Dieser ist eine Orientierung von R2 . Bei näherer Betrachtung können wir ihn charakterisieren durch zwei Eigenschaften: Drehungen
verändern die Orientierung nicht, Spiegelungen kehren die Orientierung um. Außerdem
kann es nur zwei verschiedene Orientierungen geben.
Diese Eigenschaften sollen nun auch unseren allgemeinen Orientierungsbegriff charakterisieren - wieder am Beispiel von Sphären.
30
3. Orientierung auf Mannigfaltigkeiten
Eine Schleife:
Keine Mannigfaltigkeit.
Dn \Sn :
Eine nicht kompakte
Mannigfaltigkeit.
Der Torus:
Eine geschlossene
Mannigfaltigkeit.
Abbildung 3.2.: Einige Beispiele für Mannigfaltigkeiten.
Definition 3.2.1 (Orientierung von Rn ). Sei n ∈ N und x ∈ Rn . Eine Orientierung
von Rn in x ist die Wahl eines Erzeugers der Homologiegruppe Hn (Rn , Rn \{x}).
Um zu sehen, dass wir mit der Homologiegruppe Hn (Rn , Rn \{x}) arbeiten können, ist
folgende Isomorphie wichtig:
Bemerkung 3.2.2. Für n ∈ N und x ∈ Rn gilt: Hn (Rn , Rn \{x}) ∼
= Z.
= Hn (Sn ) ∼
Beweis. Sei n ∈ N. Es gilt Hn (Rn , Rn \{x}) ∼
= Hn (Rn , Rn \{0}) nach den Funktorein
n
genschaften der Homologie: (R , R \{x}) ∼
= (Rn , Rn \{0}) sind homöomorph, also sind
die Homologiegruppen isomorph. Weiter liefert der Homotopiesatz (2.3.2) einen von der
Inklusion induzierten Isomorphismus ι∗ : Hn (Rn , Rn \{0}) → Hn (Dn , Dn \{0}), weil Dn
starker Deformationsretrakt von Rn ist (vergleiche Abbildung 3.3).
Mit denselben Argumenten ergibt sich Hn (Dn , Dn \{0}) ∼
= Hn (Dn , Dn \Sn−1 ), siehe AbRn
Dn
Abbildung 3.3.: Dn ist Deformationsretrakt von Rn .
bildung 3.4.
So bekommen wir schließlich nach Beispiel 2.1.14 die gesuchte Isomorphie
31
3. Orientierung auf Mannigfaltigkeiten
{0}
Sn−1
Abbildung 3.4.: Sn−1 ist Deformationsretrakt von Dn \{0}.
Hn (Rn , Rn \{x}) ∼
=Z
(3.1)
und damit ist Hn (Rn , Rn \{x}) eine unendliche zyklische Gruppe mit zwei möglichen
Erzeugern (die 1 und −1 entsprechen).
Nun können wir sehen, dass unsere Definition von Orientierbarkeit auf Rn unserer charakterisierenden Eigenschaft genügt:
1. Drehungen erhalten die Orientierung:
Eine Drehung um den Ursprung F : (Rn , Rn \{0}) → (Rn , Rn \{0}) ist homotop
zur Identität und induziert daher nach dem Homotopiesatz 2.3.2 die Identität in
der Homologie: F∗ = id.
2. Spiegelungen drehen die Orientierung um:
Die Spiegelung einer Sphäre hat Abbildungsgrad −1. In analoger Vorgehensweise
zur Drehung wird diesmal also ein Erzeuger auf sein Negatives abgebildet, also
wird die Orientierung umgekehrt.
3. Hn (Rn , Rn \{x}) hat nur zwei verschiedene Erzeuger, wie wir aus Bemerkung 3.2.2
wissen.
Kommentar 3.2.3.
1. Mit dieser Definition legt eine Orientierung von Rn in einem
Punkt x eine Orientierung in jedem anderen Punkt y fest: Nämlich vermöge dem
kanonischen Isomorphismus
Hn (Rn , Rn \{x}) ∼
= Hn (Rn , Rn \{y}),
= Hn (Rn , Rn \B) ∼
wobei B ein beliebiger offener Ball sei, der x und y enthalte. Man erhält den Isomorphismus mittels Homotopiesatz, weil Rn \B Deformationsretrakt von Rn \{x}
ist (s. Abbildung 3.5).
2. Diese Definition von lokaler Orientierung kann auf jede beliebige n-dimensionale
Mannigfaltigkeit M angewandt werden:
Wenn M eine Mannigfaltigkeit ist, gibt es zu jedem Punkt x ∈ M eine Umgebung
∼
=
U ⊆ M von x mit einem Homöomorphismus h : (Rn , Rn \{0}) →
(U, U \{x}).
32
3. Orientierung auf Mannigfaltigkeiten
Rn \{x}
x
B
Abbildung 3.5.: Rn \B ist Deformationsretrakt von Rn \{x}.
Seien nun ι : U ֒→ M und j : (Dn , Sn−1 ) ֒→ (Rn , Rn \{x}) die Inklusionen.
Der Ausschneidungssatz liefert, dass dann die Abbildung ι ◦ h ◦ j : (Dn , Sn−1 ) →
(M, M \{x}) einen Isomorphismus in der Homologie induziert:
∼
=
(ι ◦ h ◦ j)∗ : Hk (Dn , Sn−1 ) →
Hk (M, M \{x}).
Dass h und j Isomorphismen induzieren, haben wir bereits gesehen. Auschneidung
der abgeschlossenen Menge M \U aus der offenen Menge M \{x} liefert, dass auch
ι einen Isomorphismus in der Homologie induziert. Zusammen bekommen wir nun
für den allgemeinen Fall k ∈ N0 :
Hk (M, M \{x}) ∼
=
= Hk−1 (Sn−1 ) ∼
= Hk (Dn , Sn−1 ) ∼
Z
0
k=n
sonst.
Definition 3.2.4 (Lokale Orientierung einer Mannigfaltigkeit). Sei n ∈ N, M
eine n-Mannigfaltigkeit und x ∈ M . Eine Orientierung von M in x ist die Wahl eines
Erzeugers µx der unendlichen zyklischen Gruppe Hn (M, M \{x}).
Kommentar 3.2.5.
1. Wir notieren der Kürze wegen zukünftig: (X|A) := (X, X\A)
und Hn (X|A) := Hn (X, X\A) für einen topologischen Raum X und einen Teilraum A ⊆ X.
2. Durch das Ausschneiden hängt Hn (X|A) nur von einer Umgebung des Abschlusses
von A in X ab. Daher ist es sinnvoll, Hn (X|A) als lokale Homologie von X in A
zu betrachten.
3. Eine globale Orientierung sollte nun „eine konsistente Wahl von lokalen Orientierungen in allen Punkten“ sein:
33
3. Orientierung auf Mannigfaltigkeiten
Definition 3.2.6 (Orientierung einer Mannigfaltigkeit). Eine Orientierung einer
n-Mannigfaltigkeit M ist eine Funktion µ : M → ∐x∈M Hn (M |x), wobei ∐ die mengentheoretische Summe bezeichne, x Ô→ µ(x) := µx . Diese Funktion µ ordnet jedem x ∈ M
eine lokale Orientierung µx ∈ Hn (M |x) zu und genügt dabei der Bedingung der lokalen
Konsistenz. Das bedeutet, dass jedes x ∈ M eine Umgebung Rn ∼
= U ⊆ M hat, die einen
offenen Ball B um x mit endlichem Radius enthält, sodass alle lokalen Orientierungen
µy in Punkten y ∈ B die Bilder eines einzigen Erzeugers µB von Hn (M |B) ∼
= Hn (Rn |B)
unter den von den Inklusionen erzeugten Abbildungen ιx : Hn (M |B) → Hn (M |x) sind.
Abbildung 3.6 stellt diesen Zusammenhang dar.
M
Bx
x
z
y
Ux
µBx
Hn (M |x)
µx
Hn (M |Bx )
µz
Hn (M |y) µy
Hn (M |z)
Abbildung 3.6.: Orientierung einer Mannigfaltigkeit: Der rote Pfeil symbolisiert eine lokale Orientierung. Eine lokal konsistente Wahl solcher lokaler Orientierungen für alle Punkte x der Mannigfaltigkeit M ist eine Orientierung
der gesamten Mannigfaltigkeit. Die Bedingung der lokalen Konsistenz
wird durch die blauen Pfeile dargestellt.
Definition 3.2.7 (Orientierbarkeit). Eine n-Mannigfaltigkeit M heißt orientierbar,
wenn sie eine Orientierung hat.
Die Mannigfaltigkeiten, die wir bisher gesehen haben, waren alle orientierbar. Ein Beispiel für eine nicht orientierbare Mannigfaltigkeit ist das Möbiusband, siehe Abbildung
3.7.
Um Aussagen über die Homologiegruppen von Mannigfaltigkeiten machen zu können,
brauchen wir eine bestimmte Art von Überlagerung:
Bemerkung 3.2.8. Jede Mannigfaltigkeit M hat eine orientierbare, zweiblättrige Überæ.
lagerung M
34
3. Orientierung auf Mannigfaltigkeiten
Abbildung 3.7.: Das Möbiusband: eine nicht-orientierbare Mannigfaltigkeit.
æ definiert durch
Beweis. Sei M
æ := {µ | x ∈ M, µ lokale Orientierung von M in x}.
M
x
x
æ → M . Nun wollen wir M
æ mit eiDie Abbildung µx Ô→ x definiert eine 2:1-Surjektion M
ner Topologie versehen, um daraus eine Überlagerung zu machen. Sei dazu B ⊆ Rn ⊆ M
(eigentlich B ⊆ U ⊆ M mit U ∼
= D̊n ) ein offener Ball mit endlichem Radius
= Rn und B ∼
und µB ∈ Hn (M |B) ein Erzeuger. Weiter sei ιx : Hn (M |B) → Hn (M |x) von der kanoniæ |x ∈ M, π(µ ) =
schen Inklusion induziert und U (µB ) gegeben durch U (µB ) := {µx ∈ M
B
æ
µx }. Dann sind die Mengen U (µB ) Basis einer Topologie τ auf M , d.h. alle offenen
Mengen sind Vereinigung von Mengen der Form U (µB ). Damit ist die Definition der
æ gerade so gebaut, dass ein Schnitt µ : M → M
æ genau dann stetig ist
Topologie auf M
in x ∈ M , wenn in einer Umgebung B von x die Bilder des Schnitts mit der von µ(x)
induzierten Orientierung übereinstimmen.
æ , π) eine Überlagerung von M (denn nach KonstrukNun ist offensichtlich das Paar (M
tion ist π|U (±µB ) : U (±µB ) → B ein Homöomorphismus und π −1 (B) = U (µB ) ∪˙ U (µB )).
æ ist orientierbar, da jeder Punkt µ ∈ M
æ eine kanonische lokale
Die Mannigfaltigkeit M
x
æ |µ ) gegeben ist, das mit µ unter
Orientierung hat, die durch das Element µæx ∈ Hn (M
x
x
æ
∼
den kanonischen Isomorphismen Hn (M |µx ) = Hn (U (µB )|µx ) ∼
= Hn (M |x)
= Hn (B|x) ∼
korrespondiert. Nach Konstruktion genügen diese lokalen Orientierungen der lokalen
Konsistenz-Bedingung (siehe 3.2.6).
Proposition 3.2.9 (Charakterisierung der Orientierbarkeit für zusammenhängende Mannigfaltigkeiten). Sei M eine zusammenhängende Mannigfaltigkeit. Dann
æ zwei Zusammenhangskomponenten hat.
ist M orientierbar genau dann, wenn M
Das entspricht der intuitiven Vorstellung, dass man bei nicht-orientierbaren Mannigfaltigkeiten um eine abgeschlossene Schleife herumgeht und mit umgekehrter Orientierung
zurückkommen kann:
æ → M korrespondiert diese Vorstellung mit
In der Begrifflichkeit der Überlagerung M
æ geliftet wird, der zwei verschiedene Punkte
einer Kreislinie in M , die auf einen Weg in M
mit demselben Bild in M verbindet (vgl. Abbildung 3.8). Die Existenz solcher Wege ist
æ zusammenhängend ist.
äquivalent dazu, dass M
35
3. Orientierung auf Mannigfaltigkeiten
x1
æ
M
x2
π
M
π
x
Abbildung 3.8.: Charakterisierung von Orientierbarkeit auf zusammenhängenden Manæ → M ist eine Überlagerung, die x und x auf x
nigfaltigkeiten: M
1
2
abbildet, wobei x1 und x2 durch einen Weg verbunden sind. Dies ist nur
æ nicht orientierbar ist.
möglich, wenn M
æ eine zweiblättrige Überlagerung von M ist. Sei
Beweis. Wir zeigen zunächst, dass M
dazu x0 ∈ M fest und π −1 (x0 ) = {xå1 , xå2 } für die Überlagerungsprojektion π. Sei weiter
α : I → M ein Weg von x := π(xå) nach x0 . Einen solchen Weg gibt es, weil für Mannigfaltigkeiten zusammenhängend dasselbe wie wegzusammenhängend ist. Nun können wir
æ ; wenn wir zusätzlich α(0)
å:I →M
å
α liften zu einem α
= xå fordern, ist dieser Lift sogar
ç entweder
å
eindeutig. Insgesamt ergibt sich dann: π(α(1))
= α(1) = x0 . Daher muss α(1)
æ
xå1 oder xå2 sein und M hat entweder eine oder zwei Zusammenhangskomponenten.
æ zwei Zusammenhangskomponenten hat, sind diese jeweils homöomorph zu M
Wenn M
(vermöge der Überlagerungsprojektion), also ist M eine orientierbare Mannigfaltigkeit,
weil sie homöomorph zu einer Zusammenhangskomponente der orientierbaren Mannigæ ist.
faltigkeit M
æ eine Orientierung, also ein stetiger Schnitt von
Sei nun M orientierbar und µ : M → M
æ → M . Dann ist
π:M
æ = im(µ) ∪
˙ im(−µ),
M
wobei im(µ) und im(−µ) beide offen und zusammenhängend sind.
Korollar 3.2.10. Sei M eine orientierbare Mannigfaltigkeit, x ∈ M und µx ∈ Hn (M |x)
eine lokale Orientierung. Dann gibt es genau eine Orientierung µ auf M mit µ(x) = µx .
æ → M kann in eine
Kommentar 3.2.11 (Konstruktion: MZ ). Die Überlagerung M
größere Überlagerung MZ → M eingebettet werden, wobei MZ definiert sei durch
MZ := {αx ∈ Hn (M |x) | x ∈ M }
mit der Überlagerungsprojektion π : MZ → M, αx Ô→ x. MZ besteht im Gegensatz zu
æ also nicht nur aus allen Orientierungen von M , sondern aus allen Elementen jeder
M
36
3. Orientierung auf Mannigfaltigkeiten
beliebigen lokalen Homologiegruppe von M .
Wie zuvor topologisieren wir MZ mit Hilfe der Basis der Mengen
U (αB ) := {αx | x ∈ B, αx = ιαB }
(wobei analog zum Beweis von Bemerkung 3.2.8 αB und ιx gegeben seien als αB ∈
Hn (M |B), ιx : Hn (M |B) → Hn (M |x)). Die Überlagerung MZ → M hat unendlich viele
Blätter, da für festes x ∈ M unsere αx die ganze unendliche, zyklische Gruppe Hn (M |x)
æ in M . Der
treffen. Wenn wir αB = 0 wählen für alle B, erhalten wir eine Kopie M0 von M
Z
æ (k = 1, 2, . . . ),
Rest von MZ besteht aus einer unendlichen Folge von Kopien Mk von M
wobei Mk gegeben ist durch die Menge
Mk := {αx ∈ MZ | αx = k · µx , éµx ê = Hn (M |x) ∼
= Z},
also durch k-fache Vielfache der Erzeuger von Hn (M |x) ∼
= Z (für k ∈ N).
Definition 3.2.12 (Definition: Schnitt). Seien X, Y topologische Räume und π :
X → Y stetig und surjektiv. Eine stetige Abbildung α : Y → X, y Ô→ αy heißt Schnitt
von π, wenn π ◦ α = idY erfüllt ist (vgl. dazu auch Abbildung 3.9).
éµx ê = Hn (M |x)
µx
Hn (M |y)
αy
µy
æ
M
α
αx
x
y
M
Abbildung 3.9.: Schnitt der Orientierungsüberlagerung: Eine stetige Abbildung von
Wahlen x → αx ist ein Schnitt der Überlagerung.
Wir benötigen den Begriff des Schnitts für die Überlagerung π : MZ → M : eine Orientierung µ : M → MZ von M ist nämlich ein Schnitt der Orientierungsüberlagerung,
sodass µx Erzeuger von Hn (M |x) für alle x ∈ M ist.
Bekanntermaßen (sonst vergleiche etwa [Loo10], Lemma 2.3.17, S. 85) wird der Lift einer
Abbildung bereits durch seinen Wert in einem Punkt eindeutig festgelegt. Da ein Schnitt
37
3. Orientierung auf Mannigfaltigkeiten
der Überlagerungsprojektion für eine zusammenhängende Mannigfaltigkeit ein Lift der
Identität ist, wird dann auch der Schnitt durch seinen Wert in einem Punkt eindeutig
festgelegt.
Das Konzept der Orientierbarkeit lässt sich nun leicht auf Koeffizienten in einem beliebigen kommutativen Ring mit Eins erweitern. Ist der Begriff dort erst einmal etabliert,
übertragen sich alle Ergebnisse sofort. Dieses Thema wird im Anhang unter Abschnitt
B.1 behandelt, da hier die kürzere Notation zum Verständnis beiträgt.
Die Orientierbarkeit einer geschlossenen Mannigfaltigkeit wird in der Struktur ihrer Homologie reflektiert, wie das folgende Theorem zeigt:
3.3. Die Fundamentalklasse
Theorem 3.3.1 (Charakterisierung einiger Homologiegruppen einer Mannigfaltigkeit). Sei M eine geschlossene, zusammenhängende n-Mannigfaltigkeit. Dann gilt:
1. Falls M orientierbar ist, ist die von der kanonischen Inklusion induzierte Abbildung
ιx : Hn (M ) → Hn (M |x) ∼
=Z
ein Isomorphismus für alle x ∈ M .
2. Falls M nicht orientierbar ist, ist Hn (M ) = 0.
3. Hi (M ) = 0 für i > n.
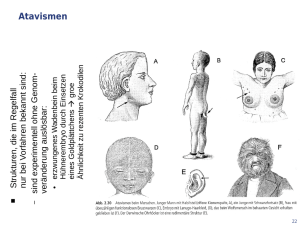
Kommentar 3.3.2.
1. Insbesondere ist Hn (M ) entweder Z oder 0, abhängig davon,
ob M orientierbar ist oder nicht.
2. Ein Element µ ∈ Hn (M ), dessen Bild µx := ιx (µ) ∈ Hn (M |x) ein Erzeuger für alle
x ist, heißt Fundamentalklasse für M . Zur Veranschaulichung vgl. Abbildung 3.10.
3. Mit dem Theorem folgt: Eine geschlossene, orientierbare Mannigfaltigkeit M hat
eine Fundamentalklasse und diese ist bis auf ein Vorzeichen sogar eindeutig.
Umgekehrt gilt auch: Falls eine Mannigfaltigkeit M eine Fundamentalklasse hat,
ist M geschlossen und orientierbar. Sei dazu µ ∈ Hn (M ) eine Fundamentalklasse
und bezeichne µx := ιx (µ) ihr Bild in Hn (M |x). Die Funktion x Ô→ µx ist dann
eine Orientierung, da die Abbildung Hn (M ) → Hn (M |x) durch Hn (M |B) faktorisiert wird für einen beliebigen offenen Ball B in M , der x enthält. (Faktorisiert
bedeutet in diesem Zusammenhang: die Abbildung kann dargestellt werden durch
zwei weitere Abbildungen
Hn (M ) → Hn (M |B) → Hn (M |x).)
38
3. Orientierung auf Mannigfaltigkeiten
Hn (M ; R)
µ
µ x′
µx
Hn (M |x; R)
M
y
x
Abbildung 3.10.: Fundamentalklasse einer Mannigfaltigkeit: Ein Element aus Hn (M ),
dessen Bild unter ιx ein Erzeuger von Hn (M |x) ist für alle x ∈ M ist
eine Fundamentalklasse von M .
Weiter muss M kompakt sein, da µx nur dann nicht Null sein kann, wenn x im Bild
eines Zykels liegt, der µ repräsentiert, und dieses Bild kompakt ist. In Anbetracht
dieser Überlegungen könnte man eine Fundamentalklasse auch Orientierungsklasse
für M nennen.
Das Theorem wird relativ leicht aus einem technischeren Hilfssatz folgen:
Lemma 3.3.3. Sei M eine n-Mannigfaltigkeit und A ⊆ M eine kompakte Teilmenge.
Dann gilt:
1. Falls x Ô→ αx ein Schnitt der Überlagerung MZ → M ist, gibt es eine eindeutige
Homologieklasse αA ∈ Hn (M |A), deren Bild in Hn (M |x) unter ιx : Hn (M |A) →
Hn (M |x) gerade αx ist für alle x ∈ A.
2. Hi (M |A) = 0 für i > n.
Wieder ist ιx eine von der kanonischen Inklusion induzierte Abbildung. Beachte, dass
diesmal der Urbildbereich ein anderer ist.
Beweis des Theorems. Um das Theorem von diesem Lemma abzuleiten, wähle
A = M . Dann ist A kompakt nach Voraussetzung. Teil 3 des Theorems folgt sofort
39
3. Orientierung auf Mannigfaltigkeiten
aus Teil 2 des Lemmas. Um Teil 1 und Teil 2 des Theorems zu erhalten, sei Γ(MZ ) die
Menge der Schnitte von MZ → M . Definiert man die Summe zweier Schnitte punktweise,
liegt sie in der abelschen Gruppe Hn (M |x). Dadurch wird auch Γ(MZ ) mit der punktweise definierten Summe zu einer abelschen Gruppe. Es gibt einen Homomorphismus
ϕ : Hn (M ) → Γ(MZ ), der eine Klasse α auf den Schnitt x Ô→ αx schickt, wobei αx das
Bild von α unter der Abbildung Hn (M ) → Hn (M |x) ist. Mit Teil 1 des Lemmas wissen
wir, dass dieser Homomorphismus bijektiv ist.
Falls M zusammenhängend ist, ist jeder Schnitt eindeutig bestimmt durch seinen Wert
in einem Punkt. Wegen dieser Eindeutigkeit ist die Auswertungsabbildung Γ(MZ ) →
Hn (M |x), µ Ô→ µx ein injektiver Homomorphismus. Ist M orientierbar, so ist die Auswertung auch surjektiv und es gilt damit: Γ(MZ ) ∼
= Z. Die Komposition
= Hn (M |x) ∼
ιx : Hn (M ) → Hn (M |x), die aus dem oben beschriebenen Homomorphismus ϕ und der
Evaluationsabbildung besteht, ist daher auch ein Isomorphismus für alle x ∈ M :
Γ(MZ )
9
ϕ
∼
=
∼
=
Hn (M )
ιx
∼
=
/
&
Hn (M |x).
Somit ist Teil 1 des Theorems bewiesen. Um Teil 2 des Theorems zu beweisen, sei
µ ∈ Γ(MZ ) und µ(x0 ) ∈ Hn (M |x0 ) ein Erzeuger für ein x0 ∈ M . Wir können M schreiben
als disjunkte Vereinigung M = ∪˙ k∈N0 Mk . Wenn nun µ(x0 ) in einem Mk ist, ist auch das
Bild von µ in diesem Mk , weil M zusammenhängend ist. Die Menge aller Punkte x ∈ M ,
für die µ(x) ein Erzeuger ist, ist dann offenbar nicht-leer, offen und abgeschlossen, also
bereits ganz M . Also ist µ(x) ∈ Hn (M |x) ein Erzeuger für alle x ∈ M . Falls M nicht
orientierbar ist und µ(x0 ) Ó= 0, folgt, dass es eine Vereinigungskomponente Mk gibt, in
1
å 0 ) ist ein Erzeuger. Das
der das Bild von µ liegt. Also liegt µå := µ in Γ(M ) und µ(x
k
bedeutet aber, dass µå eine Orientierung ist. Nach Voraussetzung war M aber nicht orientierbar, also muss µ(x0 ) = 0 sein. Daraus folgt auch Γ(M ) = 0. Mit Teil 1 des Lemmas
ist der Homomorphismus ϕ injektiv und somit folgt Hn (M ) = 0.
Beweis des Lemmas. Der besseren Übersicht wegen teilen wir den Beweis in sechs
Schritte auf:
1. Die Behauptung ist richtig, falls M = Rn und A ⊆ Rn eine konvexe, kompakte
Teilmenge ist.
Sei also A eine konvexe, kompakte Teilmenge von M = Rn und x ∈ A. Weil A
konvex ist, ist Rn \ A ein Deformationsretrakt von Rn \{x}. Zur Veranschaulichung
vgl. Abbildung 3.11.
Also induziert die offensichtliche Inklusion einen Isomorphismus in der Homologie:
Hi (Rn |A) ∼
= Hi (Rn |{x}) für alle i ∈ N. Somit gibt es eine eindeutige Zuordnung
der Elemente der Homologiegruppen, wie in Teil 1 des Lemmas behauptet. Teil 2
40
3. Orientierung auf Mannigfaltigkeiten
Rn \{x}
D̊n
A
x
Sn−1
Abbildung 3.11.: Rn ohne Punkt lässt sich auf Rn ohne eine konvexe Menge retrahieren.
des Lemmas ergibt sich mit Hi (Rn |A) ∼
= 0 für alle i > n (vgl. wieder
= Hi (Rn |x) ∼
Item 2 aus Kommentar 3.2.3).
2. Falls die Behauptung für beliebige (nicht notwendigerweise kompakte) Teilmengen
A, B ⊆ M und deren Durchschnitt A ∩ B gilt, dann ist sie auch richtig für die
Vereinigung A ∪ B.
Um das zu sehen, betrachte die Sequenz
Φ
Ψ
0 −→ Hn (M |A ∪ B) −→ Hn (M |A) ⊕ Hn (M |B) −→ Hn (M |A ∩ B),
wobei die Abbildungen Φ und Ψ gegeben seien durch Φ(α) = (α, −α) und Ψ(α, β) =
α + β. (Die Notation für Abbildungen auf Homologieniveau, die durch Inklusion
erzeugt wurden, werden dabei ausgespart.) Damit wird die Sequenz zu einer MayerVietoris-Sequenz. Die Null auf der linken Seite kommt hier aus der Voraussetzung,
dass Hn+1 (M |A ∩ B) = 0 (denn das Lemma gilt ja nach Annahme bereits für
A ∩ B). Die Terme Hi (M |A ∪ B) weiter links in dieser Sequenz sind zwischen
Gruppen geschaltet, die nach Annahme Null sind, daher gilt Hi (M |A ∪ B) = 0 für
i > n (wegen der Exaktheit von Mayer-Vietoris-Sequenzen). Das ergibt Teil 2 des
Lemmas.
Nun beweisen wir den Existenzteil von Teil 1 des Lemmas. Die Annahme liefert
uns für einen Schnitt x Ô→ αx eindeutige Klassen αA ∈ Hn (M |A), αB ∈ Hn (M |B)
und αA∩B ∈ Hn (M |A ∩ B), die das Bild αx haben für alle x aus A, bzw. B, bzw.
A ∩ B. Die Notation αA∩B (x) steht hierbei für das Bild der von der Inklusion
Hn (M |A ∩ B) → Hn (M |x) erzeugten Abbildung. Beachte, dass aus αA∩B (x) = 0
noch nicht unbedingt αA∩B = 0 folgt. Die Bilder von αA und αB in Hn (M |A ∩ B)
41
3. Orientierung auf Mannigfaltigkeiten
genügen der definierenden Eigenschaft von αA∩B und müssen daher gleich αA∩B
sein:
Für x ∈ A ∩ B und die kanonischen Inklusionen ι : M \A ֒→ M \{x} und j :
M \B ֒→ M \{x} gilt:
ι∗ (αA )(x) = αA∩B (x) = j∗ (αB )(x) = αx ∈ Hn (M |x).
Es folgt Ψ(αA , 0) = Ψ(0, αB ), also Ψ(αA , −αB ) = 0. Damit impliziert die Exaktheit der Sequenz, dass (αA , −αB ) = Φ(αA∪B ) für ein αA∪B ∈ Hn (M |A ∪ B) ist.
Das bedeutet, dass αA∪B auf αA und αB abbildet, also hat αA∪B als Bild αx für
alle x ∈ Hn (M |A ∪ B), weil αA und αB diese Eigenschaft haben. Die Abbildungen
ιx : Hn (M |A ∪ B) → Hn (M |x) werden dabei jeweils über Hn (M |A) beziehungsweise Hn (M |B) faktorisiert.
Zu zeigen bleibt, dass αA∪B eindeutig ist. Sei dazu α ∈ Hn (M |A ∪ B) eine Homologieklasse mit Bild Null in Hn (M |x) für alle x ∈ A ∪ B. Dann haben ihre Bilder
in Hn (M |A) und Hn (M |B) dieselbe Eigenschaft, sind also nach Annahme Null.
Also muss α selbst Null sein, da Φ injektiv ist. Eindeutigkeit von αA∪B folgt, wenn
diese Beobachtung auf die Differenz zwischen zwei Wahlen für αA∪B angewandt
′
wird: Seien αA∪B , αA∪B
zwei verschiedene Homologieklassen in Hn (M |A ∪ B), die
auf αx ∈ Hn (M |x) abgebildet werden und β ihre Differenz. Dann gilt mit den eben
aufgeführten Argumenten:
∀y ∈ (A ∪ B),
β(y) = 0
also Φ(β) = 0 und damit, wegen der Injektivität von Φ, auch β = 0.
3. Die Behauptung ist richtig, falls M = Rn und A ⊆ Rn eine endliche Vereinigung
von kompakten, konvexen Teilmengen ist.
Das folgt per Induktion: Der bereits gezeigte Beweisschritt 1 ist der Induktionsanfang, Schritt 2 der Induktionsschritt. Wir können Induktion verwenden, da der
Durchschnitt zweier konvexer, kompakter Teilmengen wieder eine konvexe, kompakte Teilmenge ist.
4. Die Behauptung gilt für M = Rn und beliebige kompakte Teilmengen A ⊆ Rn .
Zunächst einige Feststellungen, die wir für beide Teile des Lemmas benötigen: Für
eine beliebige kompakte Menge A ⊆ Rn sei α ∈ Hi (Rn |A) durch ein relatives Zykel z repräsentiert und sei C ⊆ Rn \A die Vereinigung der Bilder der singulären
Simplexe von ∂z. Da die Menge C kompakt ist, hat sie positiven Abstand δ von
A. Wir können A mit endlich vielen abgeschlossenen Bällen um Punkte in A mit
Radius kleiner δ überdecken. Sei K die Vereinigung dieser Bälle. Dann ist K disjunkt von C . Der relative Zykel z definiert ein Element αK ∈ Hi (Rn |K), das auf
das gegebene α ∈ Hi (Rn |A) abgebildet wird.
Damit können wir Teil 2 des Lemmas leicht zeigen: Falls i > n, haben wir mit
42
3. Orientierung auf Mannigfaltigkeiten
Schritt 3 Hi (Rn |K) = 0, und damit αK = 0, was α = 0 und damit auch Hi (Rn |A) =
0 impliziert.
Nun geht es um die Eindeutigkeitsaussage in Teil 1 des Lemmas: Sei α ∈ Hn (Rn |A)
mit α(x) = 0 für alle x ∈ A. Es gibt dann eine kompakte Obermenge K ⊇ A,
die eine endliche Vereinigung von Bällen B1 , . . . Br ist. Nach Schritt 3 gibt es ein
αK ∈ Hn (Rn |K), das unter der Inklusion ιK,A auf α abgebildet wird. Weil das
Diagramm
Hn (Rn |K)
ιK,A
ιK,x
w
Hn (Rn |A)
'
/ Hn (Rn |x)
ιA,x
kommutiert, ist αK (x) := ιK,x (αK ) = 0 für alle x ∈ A. Sei nun x ∈ Bi für ein
i ∈ {1, . . . r} und y ∈ Bi ∩ A (vgl. Abbildung 3.12).
Die von der Inklusion erzeugte Abbildung ιBi ,y : Hn (Rn |Bi → Hn (Rn |y) ist ein
y
Bi
x
A
Bj
Abbildung 3.12.: Wahl von Punkten und Mengen
Isomorphismus. Da wir aber ιK,x über Hn (Rn |Bi ) faktorisieren können:
ιK,Bi
Hn (Rn |K)
w
Hn (Rn |A)
∼
=
ιBi ,y
ιK,y
'
/ Hn (Rn |y),
folgt aus αK (y) = 0 auch ιK,Bi (αK ) = 0. Das Diagramm von eben kommutiert
auch dann, wenn wir y durch x ersetzen und so bekommen wir schließlich
αK (x) = ιK,x (αK ) = ιBi ,x (ιK,Bi αK ) = ιBi ,x (0) = 0
und damit die Eindeutigkeitsaussage in Teil 1 des Lemmas.
Die Existenzaussage ist einfach zu zeigen, da wir αA als das Bild eines geeigneten
Elements αB aus einem beliebigen Ball B ⊇ A wählen können.
43
3. Orientierung auf Mannigfaltigkeiten
5. Die Behauptung ist richtig, falls A in einer zu Rn homöomorphen Teilmenge U
von M enthalten ist, wobei M nun beliebig ist.
Sei B := M \U . Dann gilt B ⊆ M \A und der Abschluss von B ist im Inneren von
(M \A) enthalten. Mit dem Ausschneidungssatz folgt:
Hi (M |A) =
∼
=
=
=
=
=
Hi (M, M \A)
Hi (M \B, (M \A)\B)
Hi (M \B, (M \B)\A)
Hi (M \(M \U ), (M \(M \U ))\A)
Hi (U, U \A)
Hi (U |A).
Wegen Schritt 4 wissen wir aber, dass Hi (U |A) alle im Lemma geforderten Eigenschaften erfüllt. Daher stimmt die Behauptung auch für Hi (M |A).
6. Der allgemeine Fall.
Sei A ⊆ M nun also eine kompakte Teilmenge der n-Mannigfaltigkeit M . Da A
kompakt ist, finden wir endlich viele Karten U1 , . . . , Ur ∼
= Rn , die A überdecken
und die jeweils kompakte Teilmengen B1 ⊆ U1 , . . . , Br ⊆ Ur enthalten, sodass
t
A ⊆ ri=1 gilt. Setzen wir nun Ai := A ∩ Bi für i = 1, . . . , r, erhalten wir kompakte
Teilmengen A1 , . . . , Ar ⊆ A derart, dass jedes Ai in einer zu Rn homöomorphen
Teilmenge Uj von M enthalten ist (für i = 1, . . . r), siehe Abbildung 3.13.
Nun folgt das Lemma durch Induktion über r , wobei diesmal Beweisschritt 5 der
Bi
Ui
Ai
A
Abbildung 3.13.: Wahl einer geeigneten Überdeckung
Induktionsanfang und Schritt 2 der Induktionsschritt ist.
Für die Homologie nichtkompakter Mannigfaltigkeiten gibt es folgende allgemeine Aussage:
44
3. Orientierung auf Mannigfaltigkeiten
Proposition 3.3.4 (Homologie nichtkompakter Mannigfaltigkeiten). Für eine
zusammenhängende n-Mannigfaltigkeit M ist immer Hi (M ) = 0 für i > n. Ist M nicht
kompakt, gilt auch Hn (M ) = 0.
q
Beweis. Sei der Zykel z = ri=1 ni σi ∈ Zi (M ) mit ni Ó= 0 ein Repräsentant eines Element
tes von Hi (M ). Dann hat z ein kompaktes Bild K := im(z) := ri=1 im(σi ) ∈ M . Wie
im letzten Beweisschritt in Lemma 3.3.3 finden wir endlich viele offene Bälle B̊1 , . . . , B̊r ,
t
die K überdecken. Setzen wir nun U := ri=1 B̊i , haben wir eine offene Menge, die das
Bild von z enthält und deren Abschluss U ⊆ M kompakt ist. Sei V = M \U . Ein Teil der
langen exakten Sequenz des Tripels (M, U ∪ V, V ) passt in ein kommutatives Diagramm
Hi+1 (M, U ∪ V )
/ Hi (U
∪ V, V )
O
/
Hi (M,
V)
O
∼
=
Hi (U )
/
Hi (M ).
Das Diagramm kommutiert, weil bereits die Inklusionen kommutieren, die das Diagramm
in der Homologie induzieren. Der Isomorphismus Hi (U ) → Hi (U ∪ V, V ) kommt durch
Ausschneidung von V zustande.
Für i > n sind die Gruppen auf beiden Seiten von Hi (U ∪ V, V ) Null nach Lemma 3.3.3,
da U ∪ V und V die Komplemente kompakter Mengen in M sind. Folglich gilt Hi (U ) = 0
und z ist ein Rand in U , also auch in M , und wir schließen, dass Hi (M ) = 0.
Für i = n definiert die Klasse [z] ∈ Hn (M ) einen Schnitt x Ô→ [z]x von MZ . Da M
zusammenhängend ist, ist dieser Schnitt durch seinen Wert in einem einzigen Punkt
eindeutig bestimmt, somit wird die Klasse [z]x Null für alle x, falls sie Null für einige
x ist. Dies ist aber der Fall, da z kompaktes Bild hat und M nicht kompakt ist. Mit
Lemma 3.3.3 folgt, dass z Repräsentant von 0 ∈ Hn (M, V ) ist und daher auch in Hn (U ),
da Hi+1 (M, U ∪ V ) = 0 ist für i = n (wieder mit Lemma 3.3.3). Also gilt [z] = 0 in
Hn (M ) und damit auch Hn (M ) = 0, da [z] als beliebiges Element dieser Gruppe gewählt
wurde.
3.4. Vergleich: Differentialtopologische Orientierung
Es stellt sich die Frage, ob nun die algebraisch-topologische Orientierung einer glatten
(also insbesondere topologischen) Mannigfaltigkeit dasselbe ist wie die differentialtopologische Orientierung. Tatsächlich gibt es hier eine Bijektion:
Bemerkung 3.4.1. Sei M eine n-dimensionale glatte Mannigfaltigkeit und T M ihr
Tangentialbündel.
Dann gibt es eine Isomorphie zwischen den Orientierungen auf T M und den algebraischen Orientierungen auf M .
45
3. Orientierung auf Mannigfaltigkeiten
Anhang C bietet eine genauere Diskussion über die Korrespondenz der verschiedenen
Orientierungsbegriffe und liefert auch die nötigsten Grundlagen und Definitionen aus
der Differentialgeometrie.
46
4. Technische Vorbereitungen
[P]our une variété fermée [et bilatère], les nombres de Betti également distants
des extrêmes sont égaux. Ce théorème n’a, je crois, jamais été énoncé[.]
(Henri Poincaré, vgl. [Poi53], Kapitel 9, S. 228)
Nachdem wir uns nun den Werkzeugkasten der Algebraischen Topologie angeeignet und
einige Nachforschungen im Bereich orientierbarer Mannigfaltigkeiten angestellt haben,
sollte man meinen, dass nun alles beisammen ist, um den Poincaréschen Dualitätssatz
zu beweisen oder doch wenigstens zu formulieren. Das ist einerseits zutreffend, andererseits aber auch nicht. So, wie Poincaré einst den Satz formuliert hat (Originalzitat siehe
oben), sind wir nun tatsächlich in der Lage, ihn zu verstehen: „Für eine geschlossene und
orientierbare Mannigfaltigkeit sind die von den Extremen gleich weit entfernten BettiZahlen gleich. Dieses Theorem wurde, wie ich glaube, noch nie formuliert.“
Henri Poincaré hatte also einen neuen Satz aufgestellt. Obwohl er in dieser Formulierung
nicht besonders kompliziert klingt, gelang es Poincaré in seiner ersten Publikation darüber ([Poi53]) nicht, ihn korrekt zu beweisen. In den ersten beiden Ergänzungen lieferte
er daher einen anderen Beweis nach, doch die heute gängige Beweisführung ist trotzdem
eine andere.
Zunächst zu dem Begriff, der im Rahmen dieser Arbeit bisher nicht erwähnt wurde:
die Betti-Zahl. Bevor die Konstruktionen „Homologie“ und „Cohomologie“ formal exakt
und vollständig entwickelt waren, waren die sogenannten Betti-Zahlen die Invarianten,
mit denen die Anzahl der verschieden-dimensionalen Löcher in einem Raum bestimmt
wurde. In den Begriffen der Homologie können wir die k-te Betti-Zahl eines topologischen Raums X schreiben als bk (X) := rg(Hk (X)) (obwohl die Betti-Zahlen natürlich
zur Zeit von Poincaré anderweitig konstruiert werden mussten). Die Extreme, von denen
Poincaré im angegebenen Zitat spricht, sind natürlich einerseits die Null (die niedrigerdimensionalen Löcher sind ja schon per Definition Null) und andererseits die Dimension
des Raums X (denn kein Raum kann ein Loch haben, dessen Dimension seine eigene
übersteigt). Damit können wir die Formulierung des Dualitätssatzes, wie ihn Henri Poincaré damals entwickelt hat, bereits verstehen.
Um den Satz aber in seiner heutigen Formulierung zu verstehen, ist noch einiges an Technik aufzubauen. Die heutige Fassung liefert vor allem die Vorteile des Instrumentariums
der Homologie und Cohomologie. Erstens ist die Aussage H k (M ) ∼
= Hn−k viel eleganter als die Formulierung mithilfe der Betti-Zahlen. Zweitens wird der Beweis strukturell
einfacher, weil die Werkzeuge der heutigen Algebraischen Topologie verwendet werden
können (wie zum Beispiel Mayer-Vietoris). Doch der entscheidende Unterschied des heu-
47
4. Technische Vorbereitungen
tigen Dualitätssatzes zur damaligen Formulierung ist die Abbildung, die die gesuchte
Isomorphie bringt: Das Cap-Produkt mit der Fundamentalklasse.
4.1. Das Cap-Produkt
Das Cap-Produkt ist eine sehr nützliche Abbildung, die es erlaubt, Homologie- mit Cohomologieklassen zu verknüpfen. Um die Abbildung formulieren zu können, verwenden
wir die in Abschnitt 2.1.2 eingeführten Begriffe und Notationen über Simplexe.
Definition 4.1.1 (Das Cap-Produkt). Sei X ein topologischer Raum. Für eine kCokette ϕ ∈ Hom(Sk (X), Z) = S k (X) und ein singuläres n-Simplex σ : ∆n → X mit
k ≤ n ist das Cap-Produkt ∩ definiert durch
∩ : Sn (X) × S k (X) → Sn−k (X),
(σ, ϕ) Ô→ éϕ, σ ◦ [en−k . . . en ]ê · (σ ◦ [e0 . . . en−k ]).
Das Cap-Produkt von σ und ϕ ist also die (n − k)-dimensionale Vorderseite von σ,
multipliziert mit dem Wert von ϕ auf der k-dimensionalen Rückseite von σ. Für eine
q
beliebige Kette c = σ∈Sn (X) nσ σ ∈ Sn (X) definieren wir durch lineare Fortsetzung
q
c ∩ ϕ = σ∈Σn (X) nσ (σ ∩ ϕ), und für k > n schließlich setzen wir c ∩ ϕ = 0. Man erhält
eine bilineare Funktion Sn (X) × S k (X) → Sn−k (X) durch (c, ϕ) Ô→ c ∩ ϕ.
Um mit dem Cap-Produkt zu arbeiten, ist folgende Beziehung zum bereits bekannten
Cup-Produkt sehr hilfreich:
Lemma 4.1.2. Sei ψ ∈ S n−k (X), ϕ ∈ S k (X) und c ∈ Sn (X). Dann gilt:
éψ, c ∩ ϕê = éϕ ∪ ψ, cê.
Beweis. Sei σ : ∆n → X beliebig. Dann gilt:
éψ, c ∩ ϕê
Def. ∩
=
ϕ Hom.
=
Def. ∪
=
=
ψ(ϕ(σ ◦ [en−k . . . en ]) ·(σ ◦ [e0 . . . en−k ]))
ü
ûú
∈Z
ý
ϕ(σ ◦ [en−k . . . en ]) · ψ(σ ◦ [e0 . . . en−k ]))
(ϕ ∪ ψ)(σ)
éϕ ∪ ψ, cê.
Durch lineare Fortsetzung kann die Gleichung wieder auf beliebiges c ∈ Sn (X) erweitert
werden.
Um das Cap-Produkt auf Homologieniveau zu übertragen, brauchen wir folgendes Lemma:
48
4. Technische Vorbereitungen
Lemma 4.1.3. Für ϕ ∈ S k (X), c ∈ Sn (X) und die Randabbildungen ∂ bzw. δ der
Kettenkomplexe bzw. Cokettenkomplexe gilt:
∂(c ∩ ϕ) = (−1)k (∂c ∩ ϕ − c ∩ δϕ).
Beweis. Sei σ : ∆n → X beliebig. Dann gilt für alle ψ ∈ S n−k−1 (X):
2.5.5
éψ, ∂(c ∩ ϕ)ê
éδψ, c ∩ ϕê
=
4.1.2
éϕ ∪ δψ, cê
=
Proposition 2.6.3
[éδ(ϕ ∪ ψ) − (−1)n−k δϕ ∪ ψ, cê]
=
Bilinearität
(−1)k [éδ(ϕ ∪ ψ), cê − éδϕ ∪ ψ, cê]
=
2.5.5
(−1)k [éϕ ∪ ψ, ∂cê − éδϕ ∪ ψ, cê]
=
4.1.2
(−1)k [éψ, ∂c ∩ ϕê − éψ, c ∩ δϕê]
éψ, (−1)k [(∂c ∩ ϕ) − (c ∩ δϕ)]ê.
=
=
Nun können wir nämlich überprüfen, was mit (Co-)Zykeln und (Co-)Rändern beim CapProdukt geschieht:
1. Das Cap-Produkt eines Zykels α und eines Cozykels ϕ ist wieder ein Zykel.
2. Das Cap-Produkt eines Zykels und eines Corandes ist ein Rand:
∂c = 0 ⇒ c ∩ δϕ = ±∂(c ∩ ϕ).
3. Das Cap-Produkt eines Randes mit einem Cozykel ist ein Rand:
δϕ = 0 ⇒ ∂c ∩ ϕ = ±∂(c ∩ ϕ).
Es gibt also ein induziertes Cap-Produkt in der Homologie:
∩
Hn (X) × H k (X) −→ Hn−k (X).
Nun können wir eine Cap-Cup-Dualität für die Homologie sehen, nämlich dass folgendes
Diagramm kommutiert (was richtig ist, weil es repräsentantenweise richtig ist):
H n−k (X)
h
/
Hom(Hn−k (X), Z)
(∩ϕ)∗
ϕ∪
H n (X)
h
/
Hom(Hn (X), Z).
Für den Beweis der Poincaré-Dualität werden wir auch eine relative Version des CapProdukts benötigen. Tatsächlich gibt es zwei induzierte, relative Cap-Produkte, die repräsentantenweise definiert werden.
∩
(4.1)
∩
(4.2)
Sn (X, A) × S k (X, A) −→ Sn−k (X),
Sn (X, A) × S k (X) −→ Sn−k (X, A).
49
4. Technische Vorbereitungen
Wie in der absoluten Version kann von den Kettenkomplexen wieder auf die Abbildung
auf Homologieniveau geschlossen werden.
Um zu zeigen, dass (4.1) gilt, muss geprüft werden, ob ∩(Sn (A) × S k (X, A)) = 0 gilt.
Zur Erinnerung: Die relativen Ketten- bzw. Cokettengruppen waren wie folgt definiert:
Sk (X, A) = Sk (X)/Sk (A),
S k (X, A) = Hom(Sk (X, A), Z).
Es gibt einen natürlichen Homomorphismus {ϕ ∈ S k (X) : ϕ|Sk (A) = 0} → S k (X, A)
mit der Abbildungsvorschrift [c] Ô→ ϕ(c). Weil Sk (X, A) frei ist, ist diese Zuordnung ein
Isomorphismus und wir können S k (X, A) als Untergruppe von S k (X) auffassen. Nun gilt
aber offensichtlich für σ : ∆k → A und ϕ ∈ S k (X):
• σ ∈ Sn (A) ⇒ σ ◦ [e0 . . . en−k ] ∈ Sk (A),
• ϕ ∈ S k (X, A) ⇒ ϕ(σ ◦ [en−k . . . en ]) = 0.
Daher ist dann auch σ ∩ ϕ = 0.
(4.2) folgt ähnlich.
Bevor wir uns neuen Themen zuwenden können, benötigen wir noch eine weitere zentrale
Eigenschaft des Cap-Produkts:
Proposition 4.1.4 (Natürlichkeit des Cap-Produktes). Seien X und Y topologische Räume, f : X → Y eine stetige Abbildung, f∗ und f ∗ die induzierten Abbildungen
auf Homologie- und Cohomologieniveau, c ∈ Hn (X) und ϕ ∈ H k (Y ), wobei 0 ≤ k ≤ n,
n, k ∈ N0 .
Dann gilt:
f∗ (c) ∩ ϕ = f∗ (c ∩ f ∗ (ϕ)),
es herrschen also folgende Beziehungen:
Hn (X) × H k (X)
O
f∗
Hn (Y ) × H k (Y )
éψ, f∗ (c ∩ f ∗ (ϕ))ê
/
Hn−k (X)
f∗
Beweis. Es gilt für alle ψ ∈ S n−k (Y ):
∩
f∗
∩
nat. Paarung
=
4.1.2
=
Bilinearität
=
nat. Paarung
=
4.1.2
=
/ Hn−k (Y ).
éf ∗ (ψ), c ∩ f ∗ (ϕ)ê
éf ∗ (ϕ) ∪ f ∗ (ψ), cê
éf ∗ (ϕ ∪ ψ), cê
éϕ ∪ ψ, f∗ (c)ê
éψ, f∗ (c) ∩ ϕê.
50
4. Technische Vorbereitungen
4.2. Direkter Limes
Definition 4.2.1 (Gerichtete Menge). Eine gerichtete Menge ist eine Menge I mit
einer Teilordnung ≤ derart, dass es zu je zwei Elementen x, y in I ein Element z mit
x ≤ z und y ≤ z gibt.
Beispiel 4.2.2. Sei X ein Hausdorffraum und K(X) die Menge der kompakten Teilmengen K ⊆ X. Sie wird durch die Inklusion zu einer gerichteten Menge, da die Vereinigung
zweier kompakter Teilmengen wieder eine kompakte Teilmenge ist.
Definition 4.2.3 (Gerichtetes System abelscher Gruppen). Sei (I, ≤) eine gerichtete Menge. Sei weiter (Gi )i∈I eine Familie abelscher Gruppen und ((fij : Gi → Gj )i≤j∈I )
eine Familie von Homomorphismen.
Das Paar ((Gi )i∈I , (fij )i≤j∈I ) heißt gerichtetes System abelscher Gruppen, wenn folgende
Bedingungen erfüllt sind:
1. fii = idGi für alle i ∈ I und
2. fjk ◦ fij = fik für alle i ≤ j ≤ k ∈ I.
Definition 4.2.4 (Direktes System). Sei (I, ≤) eine gerichtete Menge und das Tupel
((Gi )i∈I , (fij )i≤j∈I ) ein gerichtetes System abelscher Gruppen. Sei G eine weitere abelsche Gruppe und (ϕi : Gi → G) eine Familie von Homomorphismen, die ϕj ◦ fij = ϕi
erfüllt für i ≤ j.
Das Paar (G, (ϕi )i∈I ) heißt direkter Limes von (Gi , fij ), wenn folgende universelle Eigenschaft erfüllt ist: Ist (H, (ψi )i∈I ) ein weiteres solches Tupel, so existiert genau ein
Homomorphismus Ψ : G → H mit Ψ ◦ ϕi = ψi für alle i ∈ I.
Im Diagramm sieht das folgendermaßen aus:
Gi
ψi
ϕi
fij
ϕj
>G
!Ψ
'/
7H
ψj
Gj
Wir schreiben dann für (G, (ϕi )i∈I ) auch lim
−→i∈I Gi .
Satz 4.2.5 (Existenz und Eindeutigkeit des direkten Limes). Der direkte Limes
existiert und ist bis auf Isomorphie eindeutig.
Beweis.
51
4. Technische Vorbereitungen
1. Eindeutigkeit:
Gibt es zwei direkte Limites, so können wir zeigen, dass sie bereits gleich sind:
Seien also G und G′ zwei direkte Limites. Nach der universellen Eigenschaft gibt
es eindeutig bestimmte Homomorphismen Φ : G → G′ und Ψ : G′ → G mit
Ψ ◦ Φ = idG und Φ ◦ Ψ = idG′ . Also sind Φ und Ψ Isomorphismen und G und G′
sind bis auf Isomorphie gleich.
2. Existenz:
Sei (I, ≤) eine gerichtete Menge und das Tupel ((Gi )i∈I , (fij )i≤j∈I ) ein gerichtetes
å als
System abelscher Gruppen. Wir setzen G
å :=
G
Û̇
Gi
i∈I
å als die kanonischen Inklusionen. Weiter definieren wir die Unterund ιi : Gi → G
å
gruppe H ⊆ G, die von den Elementen der Form
ιj (fij (x)) − ιi (x)
å
erzeugt wird (wobei i ≤ j und x ∈ Gi . Dann ist das Tupel (G := (G/H),
(φi )i∈I )
der direkte Limes von (Gi , fij ):
Sei (G′ , (ψi )i∈I ) ein weiteres solches Tupel, das heißt ψj ◦ fij = ψi , so existiert
genau ein Homomorphismus Ψ : G → G′ mit Ψ ◦ ϕi = ψi für alle i ∈ I, nämlich
Ψ : [ιi (x)] Ô→ ψi (x) für x ∈ Gi .
Proposition 4.2.6. Sei (I, ≤) eine gerichtete Menge und (Mi )i∈I eine Familie topolot
gischer Räume, sodass Mi ⊆ Mj für i ≤ j, sei M = i∈I Mi deren Vereinigung und
seien ιij : Mi ֒→ Mj die Inklusionen. M habe dabei die Eigenschaft, dass jede kompakte
Menge in M bereits in einem Mi enthalten sei.
Sei weiter k ∈ N0 und fij : Hk (Mi ) → Hk (Mj ) der von ιij induzierte Homomorphismus.
Weil dann (Hk (Mi ), fij ) ein gerichtetes System abelscher Gruppen ist, haben wir natürliche Abbildungen fi : Hk (Mi ) → lim
−→i∈I Hk (Mi ).
Nun setzen wir gi : Hk (Mi ) → Hk (M ) als die Homomorphismen, die von den Inklusionen ιi : Mi → M induziert werden. Dann haben wir gj ◦ fij = gi , weil entsprechendes
bereits für die induzierenden Inklusionen gilt.
Unter all diesen Voraussetzungen ist der Homomorphismus Ψ : lim
−→i∈I Hk (Mi ) → Hk (M ),
der von den fi induziert wird, ein Isomorphismus.
Beweis.
1. Surjektivität:
Sei α ein Zykel in M und repräsentiert von endlich vielen singulären Simplexen.
52
4. Technische Vorbereitungen
Die Vereinigung der Bilder dieser singulären Simplexe ist kompakt in M . Daher
liegt sie auch in einem Mn , also ist die Abbildung lim
−→n→∞ Hk (Mn ) → Hk (M )
surjektiv.
2. Injektivität:
Wenn ein Zykel in einem Mn ein Rand in M ist, impliziert die Kompaktheit, dass
der Zykel ein Rand ist in einem Ml ⊇ Mn und daher die Null in lim
−→n→∞ Hk (Mn )
repräsentiert.
4.3. Cohomologie mit kompaktem Träger
Um die Poincaré-Dualität auch für nicht-kompakte Mannigfaltigkeiten zu formulieren,
benötigen wir folgende neue Art von Cohomologie. Es sei daran erinnert, dass der singuläre Cokettenkomplex S ∗ (X, A) der Kern der von der Inklusion ι : A → X induzierten
Cokettenabbildung S ∗ (ι) : S ∗ (X) → S ∗ (A) ist und dass man die Cokettengruppe S k (X)
auch als Menge der Abbildungen von der Menge Σk (X) der singulären k-Simplexe auf X
nach Z auffassen kann (die, wie gewohnt, von der Basis Σk (X) auf ganz Sk (X) fortgesetzt
werden).
Definition 4.3.1 (Cohomologie mit kompaktem Träger). Sei X ein topologischer
Raum und k ∈ N. Sei Sc∗ (X) ⊆ S ∗ (X) der Untercokettenkomplex, dessen k-te Cokettengruppe durch solche Abbildungen ϕ : Σk (X) → Z gegeben ist, zu denen es eine
kompakte Teilmenge Kϕ ⊆ X derart gibt, dass ϕ jedes singuläre k-Simplex σ : ∆k → X
mit σ(∆k ) ∩ Kϕ = ∅ auf 0 abbildet. In Formeln:
Sc∗ (X) := {ϕ ∈ S k (X) : ∃K ⊆ X kompakt : ∀σ ∈ Σk (X) mit im(σ)∩K = ∅ : ϕ(σ) = 0}
(für alle k ∈ N0 ).
Dann ist die singuläre Cohomologie mit kompaktem Träger gegeben durch
Hck (X) := H k (Sc∗ (X)).
Abbildung 4.1 veranschaulicht diese Definition.
Offensichtlich ist Sc∗ (X) ⊆ S ∗ (X) ein Untercokettenkomplex. Ist X bereits kompakt,
sind die beiden Cokettenkomplexe gleich.
Ist nun X ein topologischer Raum und sind K ⊆ K ′ kompakte Mengen in X, so erhalten wir in der Cohomologie analog zu 4.2.6 ein gerichtetes System abelscher Gruppen:
Die Inklusion ιK ′ K : (X|K ′ ) → (X, K) induziert einen Homomorphismus H k (X|K) →
53
4. Technische Vorbereitungen
X
σ1 (∆n )
σ2 (∆n )
∆n
∆n
Kϕ
ϕ
ϕ
Z
0
Abbildung 4.1.: Die Menge der ϕ ist die Cokettengruppe mit kompaktem Träger
H k (X|K ′ ). So können wir den direkten Limes dieses gerichteten Systems mit der Cohomologie mit kompaktem Träger identifizieren:
Hck (X) =
H k (X|K),
lim
−→
K⊆X kompakt
k
denn jedes Element in lim
−→K⊆X kompakt H (X|K) wird von einem Cozykel im Cokettenkomplex S k (X|K) repräsentiert für K ⊆ X kompakt. Ein solcher Cozykel ist aber genau
k
k−1
dann Null in lim
−→K⊆X kompakt H (X|K), wenn er der Corand einer Cokette in S (X|L)
ist für eine kompakte Obermenge L ⊇ K.
Beispiel 4.3.2 (Cohomologie mit kompaktem Träger von Rn ). Wir wollen die
Cohomologie mit kompaktem Träger von Rn berechnen. Sei p ∈ N0 . Wie wir gesehen
haben, können wir identifizieren:
Hcp (Rn ) =
p
n
lim
−→ n H (R |K).
K∈K(R )
Sei Br ⊆ Rn die abgeschlossene Kugel vom Radius r um den Nullpunkt in Rn . Sei
B = {Bm |m = 0, 1, 2, . . . }. Bekanntermaßen liegt jedes Kompaktum K von Rn in einem
Bm . Daraus folgt, dass die kanonische Abbildung
∼
=
H p (Rn |Bm ) −→
lim
−
→
m→∞
54
p
n
lim
−→ n H (R |K)
K∈K(R )
4. Technische Vorbereitungen
bijektiv ist (da von der Inklusion erzeugt und mit Ausschneidung). Da für m1 ≤ m2 die
Inklusion (Rn |Bm2 ) → (Rn |Bm1 ) eine Homotopieäquivalenz ist und daher einen Isomorphismus in der Cohomologie induziert, ist die kanonische Abbildung
∼
=
H p (Rn |Bm )
H p (Rn |{0}) −→
lim
−
→
m→∞
für alle p ∈ Z bijektiv. Insgesamt haben wir nun eine Isomorphismenkette
∼
∼
=
=
Hcp (Rn ) −→
H p (Rn ) −→
∼
∼
=
=
p
n
p
n
p
n
lim
−→ H (R |Bm ) −→ H (R |{0}).
−→ n H (R |K) −→ lim
m→∞
K∈B(R )
Daraus bekommen wir mit Item 2 in Kommentar 3.2.3 aus dem Kapitel über die Orientierung auf Mannigfaltigkeiten folgende Isomorphismen:
Hcn (Rn ) ∼
=
Z,
falls p = n
falls p Ó= n.
{0}
Der Ausschneidungssatz liefert uns, dass die Cohomologiegruppe H p (X, X \ K) für
K ⊆ X kompakt nur von einer Umgebung von K in X abhängt (für einen allgemeinen Hausdorffraum X).
55
5. Der Dualitätssatz von Henri
Poincaré
So, wie das universelle Koeffiziententheorem (A.3.4) Homologie- und Cohomologiegruppen miteinander rein algebraisch verknüpft, stellt der Poincarésche Dualitätssatz für bestimmte Mannigfaltigkeiten einen geometrisch-topologischen Zusammenhang zwischen
Homologie und Cohomologie her. Doch noch viel wichtiger: die Poincaré-Dualität erlaubt es, von den k-ten Homologiegruppen auf die (n − k)-ten Homologiegruppen zu
schließen. Das ist eine der wichtigsten Eigenschaften für orientierbare, topologische Mannigfaltigkeiten: Genauer besagt diese Dualität, dass die k-te Cohomologiegruppe einer
orientierbaren topologischen n-dimensionalen Mannigfaltigkeit M isomorph zur (n − k)ten Homologiegruppe ist: H k (M ) ∼
= Hn−k (M ).
Erinnerung.
1. In Kapitel 3 haben wir gesehen, dass für eine kompakte, orientierbare n-Mannigfaltigkeit M die n-te Homologiegruppe Hn (M ) ∼
= Z ist. Ist M orientierbar, gibt es
genau zwei Orientierungen. Die Wahl einer der Orientierungen entspricht dann der
Wahl eines der Erzeuger der Homologiegruppe. So hat eine kompakte, orientierte
Mannigfaltigkeit M einen bis auf Vorzeichen eineindeutig bestimmten Erzeuger
[M ] ∈ Hn (M ), der auch die Fundamentalklasse von M genannt wird.
2. Wir erinnern uns auch an das Cap-Produkt aus Kapitel 4, das definiert ist als
∩ : Sn (M ) × S k (M ) → Sn−k (M ),
(σ, ϕ) Ô→ éϕ, σ ◦ [en−k . . . en ]ê · (σ ◦ [e0 . . . en−k ]).
Setzen wir hier statt Sn (M ) immer fest die Fundamentalklasse [M ] ∈ M , bekommen wir durch das Cap-Produkt einen Homomorphismus H k (M ) → Hn−k (M )
5.1. Poincaré -Dualität
Nach all der geleisteten Vorarbeit sind wir nun in der Lage, den Dualitätssatz von Henri
Poincaré sauber zu formulieren:
Theorem 5.1.1 (Der Poincarésche Dualitätssatz - Kompakte Version). Sei M
eine geschlossene, orientierbare n-Mannigfaltigkeit mit der Fundamentalklasse [M ] ∈
56
5. Der Dualitätssatz von Henri Poincaré
Hn (M ).
Dann ist der Homomorphismus
D : H k (M ) → Hn−k (M )
α Ô→ [M ] ∩ α
für alle k ∈ N ein Isomorphismus.
Dass dieses Theorem eine gewichtige Aussage hat, ist offensichtlich. Der Poincarésche
Dualitätssatz funktioniert auch mit der Homologie mit Koeffizienten. Für den besonderen Koeffizientenring Z2 erlaubt er sogar eine Aussage über den nicht-orientierbaren Fall
(vgl. Anhang B). Viele wichtige Mannigfaltigkeiten sind jedoch ohnehin orientierbar und beim Übergang zu Z2 gehen im orientierbaren Fall Informationen verloren.
Manchmal müssen Mathematiker (oder Anwender der Mathematik) aber mit nichtkompakten Mannigfaltigkeiten arbeiten. Noch entscheidender ist aber, dass man den
Satz auf nicht-kompakte Mannigfaltigkeiten erweitern muss, um ihn überhaupt beweisen zu können. Die Lösung für beides ist die Cohomologie mit kompaktem Träger, doch
zunächst muss das Cap-Produkt auf die Form gebracht werden, die uns weiterhilft.
Zunächst betrachten wir das relative Cap-Produkt
∩M,K : Hn (M |K) × H k (M |K) → Hn−k (M ).
Nun erinnern wir uns an die Menge Γ(MZ ) der Schnitte von MZ → M . Nach 3.3.3
induziert eine Orientierung µ ∈ ΓMZ ein eindeutig bestimmtes Element µK ∈ Hn (M |K),
sodass µK (x) = µ(x) ist, wobei µK (x) wieder die abgekürzte Schreibweise für ιK,x (µK )
ist, ιK,x : Hn (M |K) → Hn (M |x) die Inklusion ist für alle x ∈ K. Den induzierten
Homomorphismus, den uns das Cap-Produkt mit µK liefert, bezeichnen wir mit DM,K :
H k (M |K) → Hn−k (M ).
Für kompakte Mengen K ⊆ L ⊆ M ergibt sich folgende, kommutative Darstellung:
Hn (M |L) × HO k (M |L)
∩
ι∗
)
Hn−k (M )
ι∗
5
∩
k
Hn (M |K) × H (M |K)
Hierbei übernehmen wir die Notation aus der Homologie und setzen (M |A) := (M, M \
A). Aus Lemma 3.3.3 wissen wir, dass es eindeutige Elemente µK ∈ Hn (M |K; R) und
µL ∈ Hn (M |L; R) gibt, die auf eine vorgegebene Orientierung von M in jedem Punkt
aus K bzw. L einschränken. Wegen der Eindeutigkeit gilt: ι∗ (µL ) = µK .
Die Natürlichkeitseigenschaft (4.1.4) impliziert f∗ (α) ∩ ϕ = f∗ (α ∩ f ∗ (ϕ)) für eine stetige
57
5. Der Dualitätssatz von Henri Poincaré
Abbildung f : (X, A) → (Y, B) und alle α ∈ Hn (X, A), ϕ ∈ H k (Y, B). Wir können also
weiter schließen: ι∗ (µL ) ∩ x = µL ∩ ι∗ (ϕ) für alle ϕ ∈ H k (M |K; R). Insgesamt gilt also:
µK ∩ ϕ = µL ∩ ι∗ (ϕ).
Wir betrachten nun das schon einmal angesprochene gerichtete System (H k (M |K), ι∗K,L )
und die Poincaré-Abbildung DM,K : H k (M |K) → Hn−k (M ). Wie wir gerade herausgefunden haben, kommutiert nun das Diagramm
ιK,L
H k (M |K)
DM,K
x
H k (M |L)
DM,L
'
/ Hn−k (M ).
k
Nach der universellen Eigenschaft des gerichteten Systems (lim
−→K∈K H (M |K), fk ) (wobei
k
fk : H k (M |K) → lim
−→K∈K H (M |K) kanonisch) gibt es genau einen Homomorphismus
k
Ψ : lim
−→ H (M |K) → Hn−k (M ),
K∈K
der die Eigenschaft Ψ ◦ fk = DM,K für alle k ∈ N0 und K ∈ K erfüllt und wir setzen
k
diesen Homomorphismus als die Poincaré-Abbildung DM := Ψ : lim
−→K∈K H (M |K) →
k
∼ k
Hn−k (M ), was sinnvoll ist, da wir bereits die Isomorphie lim
−→ H (M |K) = Hc (M ) festK∈K
gestellt haben.
Falls M kompakt ist, gilt offensichtlich Hc∗ (M ) = H ∗ (M ), somit können wir eine verallgemeinerte Form der Poincaré-Dualität festhalten:
Theorem 5.1.2 (Der Poincarésche Dualitätssatz - Allgemeine Version). Sei M
eine orientierbare n-Mannigfaltigkeit .
Dann ist die Abbildung
DM : H k (M ) → Hn−k (M )
α Ô→ µK ∩ α
für alle k ∈ Z ein Isomorphismus, wobei K ∈ K(M ).
5.2. Beweis der Poincaré-Dualität
Um den Beweis der Poincaré-Dualität möglichst übersichtlich zu halten, lagern wir den
technischen Teil in folgendes Lemma aus:
Lemma 5.2.1 (Mayer-Vietoris-Lemma). Sei M eine (k + l)-Mannigfaltigkeit und
gleichzeitig M = U ∪ V die Vereinigung zweier offener Mengen U, V ∈ M, k ∈ N.
58
5. Der Dualitätssatz von Henri Poincaré
Dann gibt es ein bis auf Vorzeichen kommutatives Diagramm aus Mayer-Vietoris-Sequenzen:
...
/ H k (U
/ H k (U ) ⊕ H k (V )
∩V)
c
c
...
/ Hl (U
∩V)
/ H k+1 (U
c
DU ⊕−DV
DU ∩V
/ H k (M )
c
c
DM
/ Hl (U ) ⊕ Hn−k (V )
∩V)
/ ...
DU ∩V
/ Hl (M )
/ Hl−1 (U
∩V)
/ ...
Beweis des Mayer-Vietoris-Lemmas. Kompakte Mengen K ⊆ U und L ⊆ V
erzeugen die Mayer-Vietoris-Sequenz in der oberen Reihe des folgenden Diagramm. Die
untere Reihe ist ebenfalls eine Mayer-Vietoris-Sequenz.
...
/ H k (M |K
/ H k (M |K) ⊕ H k (M |L)
∩ L)
∼
=
H k (U |K) ⊕ H k (V |L)
H k (U ∩ V |K ∩ L)
µK∩L ∩
...
/ Hn−k (U
∪ L)
...
/
∼
=
/ H k (M |K
µK∪L ∩
(µK ∩)⊕(−µL ∩)
∩V)
/ Hn−k (U ) ⊕ Hn−k (V )
Hn−k (M )
/
/
...
Die beiden als Isomorphismen gekennzeichneten Abbildungen sind Ausschneidungsisomorphismen. Vorausgesetzt das Diagramm kommutiert, können wir zum Limes über
kompakte Mengen K ⊆ U und L ⊆ V übergehen. Da jede kompakte Menge aus dem
Schnitt von U und V enthalten ist in einem Schnitt K ∩L kompakter Mengen K ⊆ U und
L ⊆ V , und analog für U ∪ V , induziert das Diagramm ein neues Diagramm im Limes,
das die Form hat, die im Lemma angegeben wird. Die erste Reihe dieses GrenzwertDiagramms ist exakt, da der direkte Limes exakter Sequenzen exakt ist.
Es bleibt, die Kommutativität des oben stehenden Diagramms zu zeigen, in dem K und
L stehen. In den beiden Quadraten, die keine Rand- oder Corand-Abbildungen beinhalten, folgt die Kommutativität direkt aus den Definitionen der Abbildungen, wenn wir
sie in die Mayer-Vietoris-Sequenz einsetzen.
Etwas schwieriger ist das dritte Quadrat, das wir folgendermaßen umschreiben können:
H k (M |K ∪ L)
δ
/ H k+1 (M |K
∩ L)
µK∪L ∩
Hn−k (M )
∂
∼
=
/ H k+1 (U
µM,K∩L ∩
/
∩ V |K ∩ L)
(5.1)
µK∩L ∩
*
Hn−k−1 (U ∩ V )
Sei A := M \K und B := M \L. Dann ist die Abbildung δ die Corand-Abbildung in der
Mayer-Vietoris-Sequenz, die aus folgender kurzer exakter Sequenz von Cokettenabbildungen entsteht:
0 → S ∗ (M, A + B) → S ∗ (M, A) ⊕ S ∗ (M, B) → S ∗ (M, A ∩ B) → 0,
59
5. Der Dualitätssatz von Henri Poincaré
wobei S ∗ (M, A+B) aus Coketten in M besteht, die auf Ketten in A und auf Ketten in B
verschwinden. Um die Mayer-Vietoris-Corand-Abbildung δ in einer Cohomologieklasse
auszuwerten, die durch ein Cozykel ϕ ∈ S ∗ (M, A ∩ B) repräsentiert wird, muss zuerst
umgeschrieben werden: ϕ = ϕA + ϕB für ϕA ∈ S ∗ (M, A) und ϕB ∈ S ∗ (M, B). Dann
wird δ[ϕ] repräsentiert vom Cozykel δϕA = δϕB ∈ S ∗ (M, A + B), wobei die Gleichheit
δϕA = δϕB daher kommt, dass ϕ ein Cozykel ist, also δϕ = δϕA − δϕB = 0. Ebenso
erhalten wir die Randabbildung ∂ in der Mayer-Vietoris-Sequenz auf Homologieniveau,
indem wir ein Element von Hi (M ) durch ein Zykel z repräsentieren, das eine Summe
von Ketten zU ∈ Si (U ) und zV ∈ Si (V ) ist, für das also gilt: ∂[z] = [∂zU ].
Mit baryzentrischer Unterteilung können wir nach dem Lemma über kleine Ketten (vgl.
2.3.5) die Klasse µK∪L durch eine Kette α repräsentieren, die eine Summe αU \L +αU ∩V +
αV \K von Ketten in U \L, U ∩V und V \K ist, da diese drei offenen Mengen M überdecken
(vgl. Abbildung 5.1).
Die Kette αU ∩V repräsentiert µK∩L , da die anderen beiden Ketten αU \L und αV \K
U
L
αV \K
V
K
αU \L
αU ∩V
Abbildung 5.1.: Baryzentrische Unterteilung
im Komplement von K ∩ L liegen und daher in Hn (M |K ∩ L) ∼
= Hn (U ∩ V |K ∩ L)
verschwinden (die Isomorphie kommt aus dem Ausschneidungssatz):
Sei [α] = µK∪L mit α = αU \L + αU ∩V + αV \K und ι die kanonische Inklusion mit
ι∗ (µK∪L ) = µK∩L . Dann gilt:
µK∩L =
=
=
=
ι∗ ([αU \L + αU ∩V + αV \K ])
[ι∗ (αU \L )] + [ι∗ (αU ∩V )] + [ι∗ (αV \K ])
0 + [ι∗ (αU ∩V )] + 0
[ι∗ (αU ∩V )].
Ebenso repräsentiert die Summe αU \L + αU ∩V die Klasse µK .
Sei ϕ ein Cozykel, der ein Element von H k (M |K ∪ L) repräsentiert. Unter δ wird dieses
Element auf die Cohomologieklasse von δϕA abgebildet, wobei A definiert sei als M \K.
60
5. Der Dualitätssatz von Henri Poincaré
Durch Anwenden der Abbildung DM,K∩L auf Hn−k−1 (U ∩ V ) erhalten wir αU ∩V ∩ δϕA ∈
∩(µU ∩V , δϕ), was in derselben Homologieklasse liegt wie ∂αU ∩V ∩ ϕA , da
∂(αU ∩V ∩ ϕA ) = (−1)k (∂αU ∩V ∩ ϕA − αU ∩V ∩ δϕA ),
und αU ∩V ∩ ϕA ist eine Kette in U ∩ V .
Wenn man in Diagramm 5.1 die anderen Seiten entlanggeht, wird ϕ zuerst auf α ∩ ϕ
abgebildet. Um die Mayer-Vietoris-Randabbildung ∂ anwenden zu können, schreiben wir
α ∩ ϕ zunächst als Summe einer Kette in U und einer Kette in V und benutzen dabei
unsere Zerlegung von α:
α ∩ ϕ = (αU \L ∩ ϕ) + αU ∩V ∩ ϕ + αV \K ∩ ϕ) .
ü
ûú
∈Sn−k (U )
ý
ü
ûú
∈Sn−k (V )
ý
Nun nehmen wir den Rand der ersten der beiden Ketten und erhalten so die Homologieklasse [∂(αU \L ∩ ϕ)] ∈ Hn−k−1 (U ∩ V ). Um das mit der Homologieklasse [∂αU ∩V ∩ ϕA ]
zu vergleichen, haben wir:
∂(αU \L ∩
ϕ
üûúý
=ϕA +ϕB
da δϕ = 0
) = (−1)k ∂αU \L ∩ ϕ
= (−1)k ∂αU \L ∩ ϕA
= (−1)k+1 ∂αU ∩V ∩ ϕA ,
da ∂αU \L ∩ ϕB = 0, weil ϕB = 0
auf Ketten in B = M \L
wobei die letzte Gleichheit daher kommt, dass ∂(αU \L + αU ∩V ) ∩ ϕA gleich Null ist, da
∂(αU \L + αU ∩V ) eine Kette in U \K ist, weil, wie bereits beobachtet, αU \L + αU ∩V die
Homologieklasse µK ∈ S ∗ (M, K) repräsentiert und weil ϕA auf Ketten in A = M \K
verschwindet. Anders ausgedrückt: wegen der Gleichung ∂µK = 0 in H∗ (M |K) muss der
Repräsentant von ∂µK ein Zykel sein, also verschwindet auch der Rand ∂(αU \L + αU ∩V ).
Also kommutiert Diagramm 5.1 bis auf ein Vorzeichen, das nur von k abhängt.
Beweis der Poincaré-Dualität.
(A) Die Behauptung ist richtig, falls sie für zwei offene Teilmengen U, V ⊆ M mit M =
U ∪ V und deren Schnitt U ∩ V mit jeweils den von M induzierten Orientierungen
gilt.
Das folgt mit dem Fünferlemma 2.3.1 direkt aus 5.2.1.
t
(B) Falls es eine Folge offener Teilmengen U1 ⊆ U2 ⊆ . . . ⊆ M gibt mit M = ∞
i=1 Ui
und die Behauptung für jedes Ui mit der von M induzierten Orientierung gilt, so
ist die Behauptung auch für M richtig.
Ausschneidung und Übergang zum direkten Limes liefern:
k
Hck (Ui ) ∼
= lim
−→ H (Ui |K)
K⊆Ui
Ausschneidung von M \Ui
∼
=
61
k
H k (M |K) ∼
= lim
−→ H (M |K).
K⊆Ui
5. Der Dualitätssatz von Henri Poincaré
Außerdem haben wir natürliche Abbildungen Hck (Ui ) → Hck (Ui+1 ), da der Grenzwert mit aufsteigendem Index über immer mehr kompakte Mengen gebildet wird.
Deshalb können wir einen weiteren direkten Limes bilden:
k
∼ k
lim
−→ Hc (Ui ) = Hc (M ).
i→∞
Dabei ergibt sich die Isomorphie, weil die kompakten Mengen in M auch in den
Ui enthalten sind. Mit Proposition 4.2.6 gilt weiter: Hn−k (M ) ∼
= lim
−→i→∞ Hn−k (Ui ).
Also ist die Abbildung DM der Grenzwert der Abbildungen DUi und somit selbst
ein Isomorphismus.
(1) Die Behauptung ist richtig, falls M = Rn .
Wir wissen bereits aus Beispiel 4.3.2, dass für einen Ball B ⊆ Rn die Abbildungen H k (Rn |B) → Hck (Rn ) Isomorphismen sind (für alle k). Daher können wir nun
die Produktabbildung Hn (Rn |B) × H k (Rn |B) → Hn−k (Rn ) betrachten. Der einzige
Fall, der nicht trivial ist, ist k = n, wo jede der Gruppen in der Produktabbildung
isomorph zu Z ist. Zu zeigen ist also, dass das Cap-Produkt eines Erzeugers mit
einem Erzeuger wieder ein Erzeuger ist.
Benutze nun die Cap-Cup-Relation 4.1.2 éψ, α ∩ ϕê = éϕ ∪ ψ, αê mit ψ = 1 ∈
H 0 (Rn ). Wir sehen, dass é1, α ∩ ϕê = éϕ, αê Z erzeugt, falls α und ϕ Erzeuger
ihrer jeweiligen Homologie- und Cohomologiegruppen sind.
Um zu sehen, dass daher auch α ∩ ϕ die Homologiegruppe H0 (Rn ) erzeugt, bedarf
es noch einer weiteren Überlegung: Wie aus der linearen Algebra bekannt ist, gilt:
ist f ein Erzeuger der Homomorphismengruppe Hom(Z, Z) ∼
= Z, so ist ein Element
a ∈ Z genau dann ein Erzeuger von Z, wenn f (a) ein Erzeuger von Hom(Z, Z),
also auch von Z ist.
κ
Wir bekommen einen Isomorphismus H 0 (Rn ) → Hom(H0 (Rn ), Z). ϕ war ja als
Erzeuger von Hom(H0 (Rn ), Z) ∼
= Z gewählt. Also ist κ(ϕ) ein Erzeuger von
n
∼
Hom(H0 (R ), Z) = Z. Weiterhin war α als Erzeuger von H0 (Rn ) ∼
= Z gewählt.
Es folgt, dass κ(ϕ)(α) Erzeuger von Z ist und somit auch éα, ϕê = κ(ϕ)(α) Erzeuger von Z ist. Da außerdem éα, ϕê = κ(1)(α∩ϕ) gilt, folgt nun zu guter Letzt auch,
dass α ∩ ϕ Erzeuger von H0 (Rn ) ist. (Die gesamte Überlegung lässt sich mit dem
universellen Koeffiziententheorem (A.3.4) auf einen beliebigen Koeffizientenring R
übertragen).
(2) Die Behauptung ist richtig für offene Teilmengen M ⊆ Rn mit der von Rn induzierten Orientierung.
Bekanntermaßen sind die offenen Bälle konvex und eine abzählbare Basis der Tot
n
pologie auf Rn . Daher ist M = ∞
i=1 Ui für geeignete offene Bälle Ui ⊆ R . Definiere
t
nun Vi = j<i Uj für i ≥ 2. Induktion über i liefert, dass DVi und DUi ∩Vi Isomorphismen sind für alle i ∈ N:
Induktionsanfang: i = 2
62
5. Der Dualitätssatz von Henri Poincaré
Es gilt:
V2 =
Û
Uj = U1
j<2
und
U2 ∩ V2 = U2 ∩ U1 .
Da alle Ui konvexe, beschränkte, offene Mengen sind und der endliche Schnitt
solcher Mengen wieder eine solche Menge ist, sind sowohl die Abbildungen DUi für
alle i, als auch die Abbildungen DV2 und DU2 ∩V2 Isomorphismen nach Schritt (1).
Induktionsschritt: i → i + 1
Es gilt:
Vi+1 =
Û
j<i+1
Uj = Ui ∪ (
Û
j<i
Uj ) = Ui ∪ Vi ,
also ist DVi+1 ein Isomorphismus nach Induktionsvoraussetzung und nach Schritt
(1). Weiter gilt:
Ui+1 ∩ Vi+1 = Ui+1 ∩ (Ui ∪ Vi ),
was einen Isomorphismus DUi+1 ∩Vi+1 liefert (nach Induktionsvoraussetzung und
Induktionsanfang).
Nach Schritt (A) ist nun auch DUi ∪Vi ein Isomorphismus und damit nach (B) auch
DM .
(3) Der allgemeine Fall.
M ist also eine topologische, orientierbare Mannigfaltigkeit. Jeder Punkt in M hat
somit eine Umgebung, die zu einer offenen Teilmenge von Rn orientiert homöomorph ist. Jede topologische Mannigfaltigkeit hat eine abzählbare Basis. Daher
gibt es eine Folge V1 , V2 , . . . offener Teilmengen von M , sodass für jedes i ∈ N die
Menge Vi homöomorph zu einer offenen Teilmenge von Rn ist und M = ∪Vi . Defit
niere nun Ui = ik=1 Vk . Dadurch ergibt sich eine Folge U1 ⊆ U2 ⊆ . . . ⊆ M offener
t
Teilmengen von M mit M = ∞
i=1 Ui . Für jedes Ui ist die Behauptung also mit
Schritt (A) und (2) richtig. Mit Schritt (B) ergibt sich dann auch die Richtigkeit
der Behauptung für M .
63
A. Homologie mit Koeffizienten
Eine Verallgemeinerung der Homologie, die wir bereits kennengelernt haben, ist die Homologie mit Koeffizienten. Zunächst erfordert ihre Konstruktion einigen Aufwand, doch
manchmal bietet sie einige technische Vorteile gegenüber der „normalen“ Homologie, die
eigentlich Homologie mit Koeffizienten in Z heißen könnte.
Kurz gefasst sind die Elemente der Kettengruppen in der Homologie mit Koeffizienten
in einer beliebigen, abelschen Koeffizientengruppe G die G-Linearkombinationen von
singulären Simplexen, also
c=
r
Ø
gj σj ,
j=1
wobei c Element der Kettengruppe, r ∈ N0 , gj ∈ G und σj singuläre Simplexe sind.
A.1. Das Tensorprodukt
Definition A.1.1 (Tensorprodukt). Seien A, A′ , G ∈ Ob(Ab) abelsche Gruppen,
a, a′ ∈ A, g, g ′ ∈ G Gruppenelemente und f : A → A′ und h : G → G′ ∈ M or(Ab)
Gruppenhomomorphismen. Weiter notiere mit F (A×G) die frei erzeugte abelsche Gruppe über A × G und mit R(A × G) ⊆ F (A × G) die Untergruppe, die von den Elementen
der Form
(a + a′ , g) − (a, g) − (a′ , g),
(a, g + g ′ ) − (a, g) − (a, g ′ )
erzeugt wird.
Das Tensorprodukt mit einer abelsche Gruppe G ist ein Funktor
_ ⊗ G : Ab → Ab,
auf der Kategorie der abelschen Gruppen Ab, der definiert ist
• auf den Objekten durch
a ⊗ g := (a, g) + R(A × G) ∈ A ⊗ G := F (A × G)/R(A × G)
• und auf den Morphismen durch
f ⊗ h(a ⊗ g) := f (a) ⊗ h(g).
64
A. Homologie mit Koeffizienten
Das ist wohldefiniert, weil das Tensorprodukt folgende universelle Eigenschaft erfüllt: Ist (A ⊗ G, s) mit s : A × G → A ⊗ G, (a, g) Ô→ a ⊗ g gegeben, existiert für
jedes weitere Paar (B, t) (mit B abelsche Gruppe und t : A × G → B bilinear)
genau ein Homomorphismus Φ : A ⊗ G → B mit Φ ◦ s = t (vgl. [SZ94], Abschnitt
10.2, S. 255 ff.).
Der Ausdruck A ⊗ G wird das Tensorprodukt von A mit G genannt.
Kommentar A.1.2. Das Tensorprodukt ist kovariant:
f1 ◦ f2 ⊗ G = (f1 ⊗ G) ◦ (f2 ⊗ G)
(für entsprechend gewählte f1 , f2 ).
A.2. Das Torsionsprodukt
Es empfiehlt sich vielleicht, für die Erinnerung an Notation und Konstruktion erneut
2.4.2 nachzuschlagen.
Definition A.2.1 (Das Torsionsprodukt). Seien A und G abelsche Gruppen und
S(A) die Standardauflösung von A.
Dann ist das Torsionsprodukt T or(A; G) von A und G definiert durch
T or(A, G) := ker(j ⊗ idG ).
A.3. Homologie mit Koeffizienten
Definition A.3.1 (Kettenkomplexe mit Koeffizienten). Sei C = (Ck , ∂k ) ein Kettenkomplex und G eine abelsche Gruppe.
Dann heißt
C ⊗ G := (Ck ⊗ G, ∂k ⊗ id)
der zu C gehörige Kettenkomplex mit Koeffizienten in G.
C ⊗ G ist tatsächlich wieder ein Kettenkomplex, denn für alle k ∈ Z ist
(∂k ⊗ id) ◦ (∂k+1 ⊗ id) = (∂k ◦ ∂k+1 ) ⊗id = 0.
ü
ûú
=0
ý
Definition A.3.2 (Homologie mit Koeffizienten). Sei C ein Kettenkomplex und G
eine abelsche Gruppe.
Die Homologie von C mit Koeffizienten in G ist definiert durch
Hk (C; G) := Hk (C ⊗ G).
65
A. Homologie mit Koeffizienten
Diese Definition lässt sich auf singuläre Kettenkomplexe eines beliebigen topologischen
Raums anwenden. Entsprechendes gilt auch für die relative Homologie eines Raumpaars
(X, A):
Hk (X, A; G) := Hk (S(X, A) ⊗ G)
Definition A.3.3 (Freier Kettenkomplex). Sei C = (Ck , ∂k ) ein Kettenkomplex.
Dann heißt C frei , wenn Ck frei ist für alle k ∈ Z.
Theorem A.3.4 (Das universelle Koeffiziententheorem für die Homologie). Sei
C ein freier Kettenkomplex und k ∈ Z.
Dann gibt es Abbildungen λ und µ, sodass die folgende kurze Sequenz exakt ist und
spaltet:
(∗)
µ
λ
0 −→ Hk (C) ⊗ G −→ Hk (C; G) −→ T or(Hk−1 (C), G) −→ 0.
Beweis. Ein Beweis des universellen Koeffiziententheorems findet sich beispielsweise bei
[Hat02], Theorem 3A.3, S. 264.
Für ein topologisches Raumpaar (X, A) gilt auch folgender Koeffizientensatz (vgl. etwa
[Hat02], Corollary 3A.4, S. 264):
Korollar A.3.5. Sei (X, A) ein Raumpaar.
Dann ist für jedes k ∈ Z die folgende kurze Sequenz exakt und spaltet:
µ
λ
0 −→ Hk (X, A) ⊗ G −→ Hk (X, A; G) −→ T or(Hk−1 (X, A), G) −→ 0.
A.4. Singuläre Cohomologie mit Koeffizienten
Sei X ein topologischer Raum und R ein kommutativer Ring mit Eins. Sei S(X) sein
singulärer Kettenkomplex. Die Cohomologie von X lässt sich sehr einfach auf Cohomologie mit Koeffizienten erweitern: nämlich indem man in den Homomorphismen immer
Z durch R ersetzt. In der Homologie brauchen wir nur eine additive Struktur; in der
Cohomologie dagegen haben wir durch das Cup-Produkt auch eine Produkt-Struktur
gegeben. Um diese in die Cohomologie mit Koeffizienten übertragen zu können, dürfen
wir nicht einfach eine abelsche Gruppe für die Koeffizienten zulassen, sondern brauchen
einen Koeffizientenring. Man setzt S k (X; R) := Hom(Sk (X), R) als R-Modul. Zur Unterscheidung von Homologie und Cohomologie bezeichnen wir mit S∗ (X) den singulären
Kettenkomplex und mit S ∗ (X; R) den zugehörigen singulären Cokettenkomplex mit Koeffizienten in R. Beachte: S ∗ (X) hat automatisch Koeffizienten in R, auch wenn S∗ (X)
selbst keine Koeffizienten hat.
Theorem A.4.1 (Das universelle Koeffiziententheorem für die Cohomologie).
Sei C ein freier Kettenkomplex, k ∈ Z, R ein kommutativer Ring mit Eins und seien
66
A. Homologie mit Koeffizienten
Hk (C) die Homologiegruppen von C.
Dann sind die Cohomologiegruppen H k (C; R) des Cokettenkomplexes Hom(Ck ; R) eindeutig festgelegt durch folgende kurze, exakte, spaltende Sequenz:
(∗)
0 −→ Ext(Hk−1 (C), R) −→ H k (C; R) −→ Hom(Hk (C), R) −→ 0.
Beweis. Ein Beweis des universellen Koeffiziententheorems für die Cohomologie findet
sich beispielsweise bei [Hat02], Theorem 3.2, S. 195.
67
B. Tieferer Einblick in die
Orientierbarkeit von
Mannigfaltigkeiten
B.1. Orientierbarkeit mit Koeffizienten
Wie in Kapitel 3 angedeutet, kann das Konzept der Orientierbarkeit auf Mannigfaltigkeiten mit Koeffizienten in Z auf einen beliebigen Koeffizientenring R verallgemeinert werden. Nach Konstruktion des Orientierbarkeitsbegriffs spielt der Koeffizientenring
dann aber für die Ergebnisse aus Kapitel 3 keine Rolle mehr.
Kommentar B.1.1 (Konstruktion: Orientierbarkeit mit Koeffizienten). Die Definition von Orientierbarkeit lässt sich verallgemeinern, indem man die Koeffizientengruppe Z durch einen beliebigen kommutativen Ring mit Eins ersetzt. Eine R-Orientierung von M ordnet dann jedem Element x ∈ M einen Erzeuger von Hn (M |x; R) ∼
= R zu
(vgl. Item 2 im Kommentar zur lokalen Homologie auf Mannigfaltigkeiten), in Abhängigkeit von der entsprechenden lokalen Konsistenz-Bedingung, bei der ein „Erzeuger“ von
R ein Element u ist, sodass Ru = R. Da wir voraussetzen, dass R ein neutrales Element
hat, ist dies äquivalent dazu, zu sagen, dass u eine Einheit ist, also ein invertierbares
Element von R. Die Definition der Überlagerung MZ lässt sich sofort verallgemeinern zu
einer Überlagerung MR → M und eine R-Orientierung ist ein Schnitt dieser Überlagerung, deren Wert in jedem x ∈ M ein Erzeuger von Hn (M ; R) ist.
Kommentar B.1.2.
1. Die Struktur von MR ist wie folgt beschaffen: Betrachte den
kanonischen Isomorphismus Hn (M |x; R) ∼
= Hn (M |x; R) ⊗ R. Jedes r ∈ R legt eine
Teilüberlagerung Mr von MR fest, die aus den Punkten ±µx ⊗ r ∈ Hn (M |x; R) für
einen Erzeuger µx von Hn (M |x) besteht. Hat r die Ordnung 2 in R, gilt r = −r.
Also ist Mr einfach eine Kopie von M . Hat r nicht Ordnung 2 in R, ist Mr isomorph
æ aus Bemerkung 3.2.8. Die Überlagerung M
zur zweiblättrigen Überlagerung M
R
ist die Vereinigung dieser Mr , die abgesehen von der Gleichheit Mr = M−r disjunkt
sind.
2. Insbesondere sehen wir, dass eine orientierbare Mannigfaltigkeit auch R-orientierbar für alle R ist, während eine nicht-orientierbare Mannigfaltigkeit genau dann
R-orientierbar ist, wenn R eine Einheit der Ordnung 2 hat, was äquivalent zu 2 = 0
in R ist. Somit ist jede Mannigfaltigkeit Z2 -orientierbar.
68
B. Tieferer Einblick in die Orientierbarkeit von Mannigfaltigkeiten
3. Für die Praxis bedeutet das, dass die beiden wichtigsten Fälle R = Z und R = Z2
sind. Alle Ergebnisse, die wir in 3 gezeigt haben, gelten zwar auch für einen allgemeinen Koeffizientenring R, aber hier liegt die Begründung, dass die Ergebnisse
für R = Z und R = Z2 eigentlich bereits ausreichen.
B.2. Verallgemeinerte Ergebnisse
Theorem B.2.1 ([Hat02], 3.26: Charakterisierung von Hi (M ; R)). Sei M eine
geschlossene, zusammenhängende n-Mannigfaltigkeit . Dann gilt:
1. Falls M R-orientierbar ist, ist die Abbildung
Hn (M ; R) → Hn (M |x; R) ∼
=R
ein Isomorphismus für alle x ∈ M .
2. Falls M nicht R-orientierbar ist, ist die Abbildung
Hn (M ; R) → Hn (M |x; R) ∼
=R
injektiv und hat als Bild {r ∈ R|2r = 0} für alle x ∈ M .
3. Hi (M ; R) = 0 für i > n.
Kommentar B.2.2. Ein Element µ ∈ Hn (M ; R), dessen Bild µx ∈ Hn (M |x; R) ein
Erzeuger für alle x ist, heißt analog zur früheren Definition Fundamentalklasse für M
mit Koeffizienten in R.
Lemma B.2.3 ([Hat02], 3.27). Sei M eine n-Mannigfaltigkeit und A ⊆ M eine
kompakte Teilmenge. Dann gilt:
1. Falls x Ô→ αx ein Schnitt der Überlagerung MR → M ist, gibt es eine eindeutige
Homologieklasse αA ∈ Hn (M |A; R), deren Bild in Hn (M |x; R) gerade αx ist für
alle x ∈ A.
2. Hi (M |A; R) = 0 für i > n.
69
C. Grundlagen aus der
Differentialgeometrie
C.1. Glatte Mannigfaltigkeiten
Definition C.1.1 (Atlas, Karte, Übergangsfunktion). Seien M eine topologische
n-Mannigfaltigkeit und Ui offene Teilmengen von M , die homöomorph zu offenen Teilmengen Vi ⊆ Rn sind (für i ∈ I) und die zusammen M überdecken. Die Familie der
Homöomorphismen (ϕ : Ui → Vi )i∈I heißt Atlas von M und wird mit A notiert.
Die Elemente ϕi : Ui → Vi eines Atlasses heißen Karten und ihre Umkehrungen ϕ−1 :
Vi → Ui heißen lokale Koordinatensysteme.
Für zwei Karten ϕi , ϕj heißt
ϕij = ϕi ◦ ϕ−1
j : ϕj (Ui ∩ Uj ) → ϕi (Ui ∩ Uj )
ihre Übergangsfunktion.
Definition C.1.2 (Glatte Mannigfaltigkeit). Sei M eine topologische Mannigfaltigkeit und A ein Atlas von M . A heißt glatter Atlas, falls alle Übergangsfunktionen glatt
sind. Zwei glatte Atlanten A und B heißen äquivalent, falls ihre Vereinigung A∪B wieder
ein glatter Atlas ist. Eine Äquivalenzklasse [A] glatter Atlanten heißt glatte Struktur auf
M . Ein Paar (M, [A]) ist dann eine glatte Mannigfaltigkeit, wobei die glatte Struktur in
der Notation oft weggelassen wird.
C.2. Der Tangentialraum
Definition C.2.1 (Funktionskeime). Sei M eine glatte Mannigfaltigkeit und p ∈ M .
Wir definieren eine Äquivalenzrelation ∼ auf der mengentheoretischen Summe
Ø
{f : U → R | f glatt},
U offene Umgebung von p
indem wir zwei glatte Funktionen f : U → R, g : Uå → R dann äquivalent nennen, wenn
es eine Umgebung W ⊆ U ∩ Uå von p gibt, auf der f und g gleich sind, also f |W = g|W .
Dann heißt die Quotientenmenge
Ep (M ) :=
Ø
{f : U → R | f glatt}/ ∼
U offene Umgebung von p
70
C. Grundlagen aus der Differentialgeometrie
die R-Algebra der glatten Funktionskeime von M in p.
Definition C.2.2 (Derivation). Sei M eine glatte Mannigfaltigkeit und p ∈ M . Ein
Homomorphismus ξ : Ep → R heißt eine Derivation auf Ep , wenn für alle glatten Funktionskeime fp , gp ∈ Ep gilt:
ξ(fp gp ) = ξ(fp ) · gp (p) + fp (p) · ξ(gp ).
Definition C.2.3 (Tangentialraum in einem Punkt). Sei M eine glatte Mannigfaltigkeit und p ∈ M . Der R-Vektorraum
T Mp := {ξ : Ep → R | ξ Derivation}
der Derivationen auf Ep heißt der Tangentialraum von M im Punkt p, vgl. Abbildung
C.1. Elemente des Tangentialraums heißen Tangentialvektoren.
Abbildung C.1.: Der Tangentialraum T Mp einer glatten Mannigfaltigkeit M .
Definition C.2.4 (Tangentialraum, Tangentialbündel). Sei M eine glatte Mannigfaltigkeit und p ∈ M . Das Tangentialbündel von M ist die mengentheoretische Summe
T M :=
Ø
T Mp ,
p∈M
wobei man T M mit der Struktur einer 2n-dimensionalen, glatten Mannigfaltigkeit versehen kann. Setze π : T M → M durch ξ Ô→ p :⇔ ξ ∈ T Mp . Dann heißt π das Tangentialbündel von M .
C.3. Differentialtopologische Orientierung
Definition C.3.1 (Orientierung auf einem Vektorraum). Sei V ein R-Vektorraum
der Dimension n mit zwei Basen e = (e1 , ..., en ) und f = (f1 , ..., fn ). Sei weiter A =
71
C. Grundlagen aus der Differentialgeometrie
(aij ∈ GLn (R) deren Übergangsmatrix, also fj = aij ei .
Dann heißen e und f äquivalent, wenn A positive Determinante hat.
Eine Äquivalenzklasse O = [e] von Basen heißt eine Orientierung von V .
Diese Orientierungseigenschaft können wir auf Atlanten anwenden, indem wir fordern,
dass die Jacobi-Determinante ihrer Übergänge positiv ist. Außerdem lässt sich diese
Definition von Orientierung direkt auf den Tangentialraum übertragen.
Definition C.3.2 (Orientierung einer Mannigfaltigkeit). Sei M eine glatte, orientierbare n-Mannigfaltigkeit und seien A, B zwei glatte Atlanten von M , die die Orientierungseigenschaft erfüllen. Wir nennen A und B äquivalent, wenn die Vereinigung
A ∪ B wieder ein glatter Atlas ist, der die Orientierungseigenschaft erfüllt.
Eine Orientierung von M ist dann die Wahl einer Äquivalenzklasse von Atlanten.
C.4. Korrespondenz der Orientierungsbegriffe
Am Ende von Kapitel 3 wurde darauf hingewiesen, dass die beiden Orientierungsbegriffe, die in der Algebraischen Topologie und in der Differentialgeometrie auftauchen,
korrespondieren. Hier sei darauf noch einmal etwas genauer eingegangen:
Bemerkung C.4.1. Sei M eine n-dimensionale glatte Mannigfaltigkeit und T M ihr
Tangentialbündel.
Dann gibt es eine Isomorphie zwischen den Orientierungen auf T M und den algebraischen Orientierungen auf M .
Beweisskizze. Wähle eine riemannsche Metrik (= eine Art Abstandsbegriff) auf M
und zu jedem x ∈ M eine offene Umgebung Ux von p und eine Zahl ǫx > 0.
Definiere Dǫx T Mx := {v ∈ T Mx | ||v|| < ǫx }.
Dann gibt es eine Exponentialabbildung
expx : Dǫx T Mx → Ux , 0 Ô→ x,
die ein Homöomorphismus ist. Diese Exponentialabbildung induziert eine Isomorphie
Hn (Dǫx T Mx |0) ∼
= Hn (M |x). Unabhängig davon bekommen wir mit dem Ausschneidungssatz Hn (Dǫx T Mx |0) ∼
= Hn (T Mx |0) und wir erhalten zusammen einen Isomorphismus
∼
=
ex : Hn (T Mx |0) →
Hn (M |x).
Dieser Isomorphismus ist dann unabhängig von der riemannschen Metrik und der Wahl
von ǫx .
Durch Wahl einer Basis einer Orientierung auf T Mx bekommen wir einen kanonischen
∼
=
Isomorphismus Rn ∼
= T Mx . Ebenso erhalten wir einen Isomorphismus ϕ : (Rn |0) →
72
C. Grundlagen aus der Differentialgeometrie
(T Mx |0). Wählen wir eine andere Basis derselben Orientierung, finden wir mit Zeilenstufenumformungen Homotopien (Rn |0) ∼
= (Rn |0) zwischen den Basen, die die Determinante positiv lassen. Also induzieren diese Homotopien in der Homologie die Identität.
Darum induziert ϕ auf Homologieniveau einen Isomorphismus, der abhängig von der
gewählten Orientierung, aber unabhängig von der gewählten Basis ist: Hn (Rn |0) ∼
=
Hn (T Mx |0). Kombiniert mit dem Isomorphismus ex ergibt sich also eine neue Isomorphie: Hn (Rn |0) ∼
= Hn (M |x). Für einen Erzeuger µ von Hn (Rn |0) bekommen wir unter
der eben definierten Abbildung ein Element µx ∈ Hn (M |x) - und {µx | x ∈ M } definiert
schließlich eine Orientierung im algebraisch-topologischen Sinn.
73
Abbildungsverzeichnis
2.1.
2.2.
2.3.
2.4.
f = (fk )k∈Z ist eine Kettenabbildung, wenn das Diagramm kommutiert.
Die Standardsimplexe in Dimension 1 und 2. . . . . . . . . . . . . . . .
Induzierung des relativen Randoperators . . . . . . . . . . . . . . . . . .
Das Extensionsprodukt ist der Cokern der Abbildung j ∗ . . . . . . . . .
12
14
17
24
S2 \ (0, 0, 1) ist homöomorph zu R2 . . . . . . . . . . . . . . . . . . . . .
Einige Beispiele für Mannigfaltigkeiten. . . . . . . . . . . . . . . . . . .
Dn ist Deformationsretrakt von Rn . . . . . . . . . . . . . . . . . . . . .
Sn−1 ist Deformationsretrakt von Dn \{0}. . . . . . . . . . . . . . . . . .
Rn \B ist Deformationsretrakt von Rn \{x}. . . . . . . . . . . . . . . . .
Orientierung einer Mannigfaltigkeit . . . . . . . . . . . . . . . . . . . . .
Das Möbiusband: eine nicht-orientierbare Mannigfaltigkeit. . . . . . . .
Charakterisierung von Orientierbarkeit auf zusammenhängenden Mannigfaltigkeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9. Schnitt einer Mannigfaltigkeit . . . . . . . . . . . . . . . . . . . . . . . .
3.10. Fundamentalklasse einer Mannigfaltigkeit . . . . . . . . . . . . . . . . . .
3.11. Rn ohne Punkt lässt sich auf Rn ohne eine konvexe Menge retrahieren. .
3.12. Wahl von Punkten und Mengen . . . . . . . . . . . . . . . . . . . . . . .
3.13. Wahl einer geeigneten Überdeckung . . . . . . . . . . . . . . . . . . . . .
30
31
31
32
33
34
35
4.1. Die Menge der ϕ ist die Cokettengruppe mit kompaktem Träger . . . . .
54
5.1. Baryzentrische Unterteilung . . . . . . . . . . . . . . . . . . . . . . . . .
60
C.1. Der Tangentialraum T Mp einer Mannigfaltigkeit M . . . . . . . . . . . . .
71
3.1.
3.2.
3.3.
3.4.
3.5.
3.6.
3.7.
3.8.
i
36
37
39
41
43
44
Glossar
Abbildung, stetige Eine Abbildung zwischen topologischen Räumen X und Y heißt
stetig, wenn die Urbilder von offenen Mengen in Y auch offen in X sind.
Deformationsretrakt Eine Teilmenge A eines topologischen Raums X heißt Deformationsretrakt von X, wenn es eine stetige Abbildung r : X → A gibt, die eingeschränkt auf A die Identität auf A ist und verknüpft mit der kanonischen Inklusion
homotop zur Identität auf ganz X ist. A und X sind dann automatisch homotopieäquivalent.
Funktion, glatte Eine Funktion heißt glatt, wenn sie stetig und unendlich oft differenzierbar ist (im analytischen Sinne).
Gruppe, freie Eine Gruppe G heißt frei, wenn sie ein Erzeugendensystem E hat, mit
dem sich jedes Element von G eindeutig darstellen lässt durch g = ea11 · · · · · eakk ,
wobei e1 , . . . , ek ∈ E, ei Ó= ej für i Ó= j und a1 , . . . ak ∈ Z\{0}.
Hausdorffraum Ein topologischer Raum X heißt Hausdorffraum, wenn seine Topologie
punktetrennend ist, also es für je zwei Punkte aus X offene Umgebungen in X
gibt, die leeren Schnitt haben.
Homotopie Zwei Abbildungen f, g : X → Y zwischen topologischen Räumen heißen
homotop zueinander, wenn es eine stetige Abbildung H : X × [0, 1] → Y gibt mit
H(x, 0) = f (x) und H(x, 1) = g(x) für alle x ∈ X. Die Abbildung H nennen wir
dann eine Homotopie zwischen X und Y und wir schreiben f ≃ g.
Inklusion, kanonische Für einen topologischen Raum X und einen Teilraum A ⊆ X
heißt die Abbildung ι : A → X, a Ô→ a die kanonische Inklusion.
Menge, abgeschlossene Eine Teilmenge eines topologischen Raums heißt abgeschlossen, wenn ihr Komplement offen ist.
Menge, offene Eine Teilmenge eines topologischen Raums heißt offen, wenn sie Element
der Topologie ist.
Raum, kompakter Ein Hausdorffraum X heißt kompakt, falls jede offene Überdeckung
eine endliche Teilüberdeckung hat.
ii
Glossar
Raum, zusammenhängender Ein topologischer Raum X heißt zusammenhängend, wenn
bei jeder disjunkten Zerlegung X = U ∪ V von X mit offenen Mengen U und V
bereits eine der beiden Mengen leer ist.
Topologie Für eine Menge X heißt ein System von Teilmengen τ ⊆ P(X) dann eine
Topologie auf X, wenn sowohl X selbst als auch die leere Menge in τ enthalten
sind und τ invariant bezüglich abzählbarer Vereinigung und endlichem Schnitt ist.
(X, τ ) nennen wir dann einen topologischen Raum.
Topologie, abzählbare Ein topologischer Raum hat abzählbare Topologie, wenn es eine
abzählbare Basis gibt.
Topologie, Basis einer Eine Teilmenge einer Topologie heißt Basis der Topologie, wenn
jede offene Menge die Vereinigung von Elementen der Basis ist.
Überdeckung, offene Eine Familie offener Teilmengen eines topologischen Raums X
heißt offene Überdeckung von X, wenn X gleich der Vereinigung der Familie ist.
æ π) eine ÜberÜberlagerung Für einen zusammenhängenden Raum X heißt ein Paar (X,
æ auch zusammenhängend ist, π : X
æ → X eine stetige Abbildung
lagerung, wenn X
und jeder Punkt in X eine offene Umgebung U ⊆ X hat, deren Urbild unter
æ ist, dass π auf diese
π die disjunkte Vereinigung von solchen Teilmengen von X
Teilmengen eingeschränkt ein Homöomorphismus ist.
iii
Notationen
k-Coränder eines Cokettenkomplexes C 24
k-Ränder von C 12
Baryzentrische Unterteilung 21
= (C k , δ k )k∈Z
∗
)k∈Z
(Hom(Ck , Z), ∂k+1
Cokettenkomplex 24
(C, ∂)
= (Ck , ∂k )k∈Z
Kettenkomplex 11
Dn
= {x ∈ Rn | ||x|| ≤ 1}
abgeschlossener, n-dimensionaler Einheitsball 29
Ep (M )
Raum der glatten Funktionskeime auf einer Mannigfaltigkeit M im Punkt p 70
Ext(A; G)
Extensionsprodukt zweier abelscher Gruppen A und
G 23
F (M )
= {Σx∈M nx x| nx ∈ Z, nx = 0 für fast alle x ∈ M }
freie abelsche Gruppe über einer Menge M 15
Cohomologie von X mit kompaktem Träger 54
Hck (X)
k
H (C)
k-te Cohomologiegruppe eines Raumes C 24
H k (X, A)
= H k (S(X, A) 26
Hk (C)
k-te Homologiegruppe von (C,∂) 12
Hk (C; G)
= Hk (C ⊗ G)
k-te Homologiegruppe von (C,∂) mit Koeffizienten in
G 65
Hk (X, A)
= Hk (S(X, A)) 17
Hom(V, W ) := {ϕ : V → W | ϕ Homomorphismus} für zwei
Vektorräume V und W 23
M or(X, Y ) Morphismen zwischen Objekten X, Y einer Kategorie 18
MZ
:= {αx ∈ Hn (M |x) | x ∈ M },
eine allgemeine Überlagerung 36
Ob(C)
Objekte einer Kategorie C 18
S ∗ (X)
= (S k (X))k∈Z 26
S∗ (X)
= (Sk (X))k∈Z 15
B k (C)
Bk (C)
BX
(C, δ)
iv
Notationen
Sc∗ (X)
Sk (X, A)
S k (X)
Sk (X)
TM
T Mp
T or(A; G)
(X|A)
Z k (C)
Zk (C)
Γ(MZ )
∆k
∆ik−1
i
δk−1
Σk (X)
∩
∪
[x0 , . . . , xk ]
é·, ·ê
|| · ||
M̊
M
_⊗_
kompakter Träger des singulären Cokettenkomplexes
54
= Sk (X)/Sk (A) 16
= Hom(Sk (X), Z) 26
= F (Σk (X)) 15
Tangentialbündel einer Mannigfaltigkeit M 71
Tangentialraum einer Mannigfaltigkeit M im Punkt
p 71
Torsionsprodukt zweier abelscher Gruppen A und G
65
= (X, X\A) 33
k-Cozykeln eines Cokettenkomplexes C 24
k-Zykeln von C 12
Menge der Schnitte MZ → M 40
k-dimensionales Standardsimplex 13
q
= {x ∈ ∆k | x = kj=0 λj ej , λj } für k ∈ N0 und
(e0 , ..., ek ) die kanonische Basis von Rn+1
die i gegenüberliegende (k−1)-dimensionale Seite des
Standardsimplexes 13
: ∆k−1 → ∆ik−1 ⊆ ∆k
Seitenabbildung 14
= {σ : ∆k → X stetig}
Menge der singulären k-Simplexe in X 15
Cap-Produkt 48
Cup-Produkt 27
= f |∆k : ∆k → Rn , wobei x0 , . . . xk ∈ Rn und
f : Rk+1 → Rn mit (λ0 , . . . , λk ) Ô→ λ0 x0 + · · · + λk xk ,
die von der Eckenabbildung erzeugte lineare Abbildung 14
: C k × Ck → G, (ϕ, c) Ô→ ϕ(c), für einen Cokettenkomplex C k und einen Kettenkomplex Ck ,
natürliche Paarung 25
√
: Rn → R, (x1 , . . . , xn ) Ô→ x1 + · · · + xn ,
Norm auf Rn 29
topologisches Inneres der Menge M 22
topologischer Abschluss der Menge M 45
Tensorprodukt 64
v
Index
Atlas, 70
Auflösung
freie, 23
Standard-, 23
Ausschneidungssatz, 22
Auflösung, 23
Kettenkomplex, 66
Fundamentalklasse (Mannigfaltigkeit), 38
mit Koeffizienten, 69
Funktor
kontravarianter, 19
kovarianter, 19
Baryzentrische Unterteilung, 21
Cap-Cup-Relation (Lemma), 48
Cap-Produkt, 48
relatives, 50
Cohomologie, 24
-gruppe, 24
mit kompaktem Träger, 53
relative, 26
singuläre, 25
Cokette, 24
Cokettenabbildung, 24
Cokettenkomplex, 24, 25
Corand, 24
Corand-Rand-Formel, 26
Cozykel, 24
Cup-Produkt, 27
gerichtet
System abelscher Gruppen, 51
gerichtet (Menge), 51
glatt (Mannigfaltigkeit), 70
Homologie
-gruppe, 12
mit Koeffizienten, 65
relative, 17
singuläre, 15
von Sn , 16
Homomorphismus
in der Homologie induzierter, 12
Homotopiesatz, 21
induziert in der Homologie (Homomorphismus), 12
Derivation, 71
direkt
Limes, 51
Dualitätssatz von Henri Poincaré, 58
Karte, 70
Kategorie, 18
Kettenabbildung, 11
Kettenkomplex, 11
freier, 66
mit Koeffizienten, 65
relativer, 16
singulärer, 15
Kleine Ketten (Satz), 22
Eckenabbildung, 13
gleichungen, 14
exakt (Sequenz), 13
Extensionsprodukt, 23
frei
vi
Index
von Mannigfaltigkeiten
differentialgeometrisch, 72
global, 34
lokal, 33
Koeffiziententheorem (universelles)
Cohomologie, 66
Homologie, 66
kompakt (Mannigfaltigkeit), 30
kontravariant (Funktor), 19
kovariant (Funktor), 19
Lemma
Cap-Cup-Relation, 48
Limes
direkter, 51
lokale Orientierung (Mannigfaltigkeit), 33
Mannigfaltigkeit
Fundamentalklasse einer, 38
glatte, 70
kompakte, 30
lokale Orientierung einer, 33
orientierbare (algebraisch-topologisch),
34
orientierbare (differentialgeometrisch),
72
Orientierung (algebraisch-topologisch),
34
Orientierung (differentialgeometrisch),
72
topologische, 29
Mayer-Vietoris
-Sequenz, 22
Satz von, 22
Menge
gerichtete, 51
natürliche
Paarung, 25
Transformation, 20
Orientierbarkeit (Mannigfaltigkeit)
algebraisch-topologisch, 34
differentialgeometrisch, 72
Orientierung
des Tangentialraums, 72
von Rn , 31
vii
Paarung
natürliche, 25
Poincaré-Dualität, 58
Produkt
Cap-, 48
Cup-, 27
Extensions-, 23
Tensor-, 64
Torsions-, 65
Rückseite (Simplex), 26
Rand, 12
Raum der glatten Funktionskeime, 70
relativ
Cap-Produkt, 50
Cohomologie, 26
Homologie, 17
Kettenkomplex, 16
Satz
Ausschneidung, 22
Corand-Rand-Formel, 26
Homotopie-, 21
kleine Ketten, 22
Mayer-Vietoris, 22
Universelles Koeffiziententheorem
für die Cohomologie, 66
für die Homologie, 66
von Henri Poincaré, 58
Schnitt, 37
Schwerpunkt, 21
Sequenz
exakte, 13
Mayer-Vietoris-, 22
spaltende, 13
Simplex
Rückseite eines, 26
Standard-, 13
Index
Vorderseite eines, 26
singulär
Cohomologie, 25
Homologie, 15
Kettenkomplex, 15
Spaltung (Sequenz), 13
Standardauflösung, 23
simplex, 13
System abelscher Gruppen
direktes, 51
Tangentialbündel, 71
raum, 71
in einem Punkt, 71
Orientierung, 72
vektor, 71
Tensorprodukt, 64
Torsionsprodukt, 65
Transformation
natürliche, 20
Übergangsfunktion, 70
Universelles Koeffiziententheorem
Cohomologie, 66
Homologie, 66
Unterteilungskette, 21
Vorderseite (Simplex), 26
Zykel, 12
viii
Literaturverzeichnis
[Brü02]
Brüning, Jochen: Die Vermutung von Poincaré. Elemente der Mathematik,
57:103–108, 2002.
[Gal03]
Galison, Peter: Einsteins Uhren, Poincarés Karten. Die Arbeit an der Ordnung der Zeit. Fischer Verlag, Frankfurt, 2003.
[Hat02]
Hatcher, Allen: Algebraic Topology. Cambridge University Press, 2002.
[HE03]
Hulek, Klaus und Wolfgang Ebeling: Algebraische Topologie. Vorlesungsskript; online verfügbar unter http://www.iag.uni-hannover.de/
~hulek/Skripten/AlgTop/AlgTop.pdf; besucht am 05.02.2012., SS 2003.
[KN06]
Kaiser, Hans und Wilfried Nöbauer: Geschichte der Mathematik. Oldenbourg Schulbuchverlag, München, 2006.
[Lü05]
Lück, Wolfgang: Algebraische Topologie. Vieweg Verlag, Wiesbaden, 2005.
[Loo10]
Loose, Frank: Algebraische Topologie. Vorlesungsskript; online verfügbar unter http://www.mathematik.uni-tuebingen.de/~loose/studium/
Skripten/AlgTop_01.24.pdf; besucht am 01.02.2012., WS 2009/2010.
[Mas91] Massey, William S.: A Basic Course in Algebraic Topology. Springer Verlag,
New York, 1991.
[Mes90] Meschkowski, Herbert: Denkweisen großer Mathematiker. Vieweg Verlag,
Braunschweig, 1990.
[MS74]
Milnor, John W. und James D. Stasheff: Characteristic Classes. Princeton University Press, 1974.
[Pai82]
Pais, Abraham: „Raffiniert ist der Herrgott ...“: Albert Einstein, eine wissenschaftliche Biographie. Spektrum, Heidelberg, 1982.
[PDD94] Pfeiffer, Jeanne und Amy Dahan-Dalmedico: Wege und Irrwege - Eine
Geschichte der Mathematik. Birkhäuser Verlag, Basel; Boston; Berlin, 1994.
[Poi04]
Poincaré, Henri: Wissenschaft und Hypothese. B.G. Teubner, Leipzig, 1904.
ix
Literaturverzeichnis
[Poi53]
Poincaré, Henri: Œuvres par la section de géométrie tome VI - Topologîe.
Gauthier-Villars, Paris, 1953.
[SZ94]
Stöcker, Ralph und Heiner Zieschang: Algebraische Topologie. B.G.
Teubner, Stuttgart, 1994.
[tD00]
Dieck, Tammo tom: Topologie. Walter de Gruyter, Berlin; New York, 2000.
[Wuß79] Wußing, H.: Vorlesungen zur Geschichte der Mathematik. VEB Deutscher
Verlag der Wissenschaften Berlin, 1979.
x