Mechanik Skript
Werbung

Mechanik I - IMES
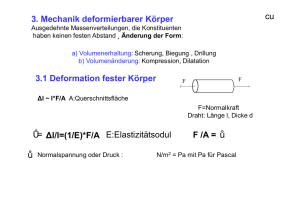
Mechanik II - MECHMAT
PVK Skript
Lukas Fröhlich
(Ergänzungen: Mathias Wild)
ETH Zürich
Sommer 2014
1
Vorwort
Dieses Skript soll als Vorbereitung auf die Basisprüfung in dem Fach Mechanik I
und II dienen. Der Inhalt des ersten Semesters basiert grundlegend auf den Lehrbüchern Ingenieurmechanik I - Grundlagen und Statik - 2. Auflage, Vieweg + Teubner,
Ingenieurmechanik II - Deformierbare Körper - 2. Auflage, Vieweg + Teubner von
Mahir B. Sayir, Jürg Dual und Stephan Kaufmann und dem Übungsheft zu Mechanik I und II von Udo Lang, Bernard Masere und István A. Veres. Der Inhalt des
zweiten Semesters ist größtenteils aus dem Buch Mechanics of Materials - 8. Edition, Pearson von R.C. Hibbeler übernommen.
Auch wenn ich mir große Mühe in Bezug auf Vollständigkeit und Richtigkeit aller
Formeln und Konzepte gegeben habe, besteht die Möglichkeit, dass kleine Fehler in
diesem Skript sind.
Des Weiteren ist es mir noch wichtig zu sagen, dass der alleinige Besuch dieses
Vorbereitungskurses wahrscheinlich nicht ausreichen wird, um die Prüfung zu bestehen. Ich kann nur noch einmal die grundlegende Theorie wiederholen und Tipps
geben in Bezug auf die Prüfung. Entscheidend für das Fach Mechanik ist viel Übung.
Viel Erfolg!
2
Inhaltsverzeichnis
1 Bewegung und Kinematik
1.1 Kartesische Koordinaten . . . . . . . .
1.2 Zylindrische Koordinaten . . . . . . . .
1.3 Sphärische Koordinaten . . . . . . . .
1.4 Koordinatentransformationen . . . . .
1.5 Satz der projizierten Geschwindigkeiten
1.6 Allgemeine Starrkörperbewegung . . .
1.6.1 Rotation . . . . . . . . . . . . .
1.6.2 Translation . . . . . . . . . . .
1.6.3 Kreiselung . . . . . . . . . . . .
1.7 Invarianten der Starrkörperbewegung .
1.8 Zentralachse . . . . . . . . . . . . . . .
1.8.1 Bestimmung der Zentralachse .
1.9 Satz vom Momentanzentrum . . . . . .
1.9.1 Sonderfälle . . . . . . . . . . . .
1.9.2 Polbahnen . . . . . . . . . . . .
1.10 Fachwerke . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
6
7
8
8
9
9
9
10
10
11
11
12
12
13
14
2 Kräfte und Momente
2.1 Definitionen . . . . . . . . . .
2.2 Reduktion einer Kräftegruppe
2.3 Statische Äquivalenz . . . . .
2.4 Zentralachse . . . . . . . . . .
2.4.1 Sonderfälle . . . . . . .
2.5 Linienverteilte Kräfte . . . . .
2.5.1 Sonderfälle . . . . . . .
2.6 Seilkräfte . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
15
15
15
16
16
16
17
17
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3 Reibung
18
3.1 Haftreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.2 Gleitreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Zahnradsysteme
19
5 Statik
5.1 Statik-Aufgaben lösen . . .
5.2 Statische Bestimmtheit . . .
5.3 Standfestigkeit . . . . . . .
5.4 Lagerkräfte . . . . . . . . .
5.5 Ideale Fachwerke . . . . . .
5.5.1 Prinzip der virtuellen
5.5.2 Knotengleichgewicht
5.5.3 Drei-Kräfte-Schnitt .
20
20
20
21
22
22
23
24
24
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
Leistung (PdvL)
. . . . . . . . . .
. . . . . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6 Beanspruchung
6.1 Differentialbeziehungen . . . . . . . . . . . . . . .
6.2 Vorgehen für Beanspruchung . . . . . . . . . . . .
6.3 Beanspruchung an gekrümmten Balken . . . . . .
6.3.1 Polarkoordinaten . . . . . . . . . . . . . .
6.3.2 Beanspruchungskomponenten . . . . . . .
6.3.3 Vorgehen . . . . . . . . . . . . . . . . . .
6.4 Beanspruchungsdiagramme . . . . . . . . . . . . .
6.4.1 Beispiel für ein Beanspruchungsdiagramm
6.5 Vorzeichenkonventionen . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
25
26
26
27
27
27
27
28
28
29
7 Spannung / Stress
30
7.1 Normalspannung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.2 Schubspannung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7.3 Sicherheitsfaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
8 Dehnung / Strain
32
8.1 Dehnung bei gegebenem Verschiebungsfeld . . . . . . . . . . . . . . . 32
8.2 Schubverzerrung bei gegebenem Verschiebungsfeld . . . . . . . . . . . 32
9 Mechanische Eigenschaften von Materialien
9.1 Spannungs-Dehnungs-Diagramm . . . . . . . . . . . . . . . . . . . . .
9.2 Poisson Zahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Schubspannung-Schubdehnungs-Diagramm . . . . . . . . . . . . . . .
34
34
34
35
10 Flächenträgheitsmomente 2. Grades
10.1 Biegung . . . . . . . . . . . . . . . . . . . . . . . . .
10.2 Torsion . . . . . . . . . . . . . . . . . . . . . . . . . .
10.3 Hauptrichtungen . . . . . . . . . . . . . . . . . . . .
10.4 Verschiebungssatz nach Huygens . . . . . . . . . . . .
10.5 Flächenmittelpunkt . . . . . . . . . . . . . . . . . . .
10.6 Vorgehen: Berechnung von Flächenträgheitsmomenten
.
.
.
.
.
.
36
36
36
36
37
37
38
.
.
.
.
.
.
.
.
.
.
.
.
39
39
39
39
40
41
41
41
42
42
43
43
43
11 Belastungsfälle
11.1 Axiale Belastung . . . . . . . . . . . . . . . . . .
11.1.1 Elastische Deformation . . . . . . . . . . .
11.1.2 Spannung durch Temperaturunterschiede /
11.1.3 Spannungsspitzen / Stress Concentrations
11.2 Torsion . . . . . . . . . . . . . . . . . . . . . . . .
11.2.1 Spezifischer Verdrehungswinkel . . . . . .
11.2.2 Absolute Verdrehung . . . . . . . . . . . .
11.2.3 Schubspannung durch Torsion . . . . . . .
11.2.4 Statisch Unbestimmte Torsionsprobleme .
11.2.5 Leistungsübertragung . . . . . . . . . . . .
11.2.6 Geschlossene dünnwandige Querschnitte .
11.2.7 Spannungsspitzen . . . . . . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . .
. . . . .
Thermal
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
. . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . .
. . . .
Stress
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11.3 Spezielle Biegung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.3.1 Normalspannung durch Biegung . . . . . . . . . . . . . . . .
11.3.2 Biegelinie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.3.3 Vorgehen: Berechnung der Biegelinie . . . . . . . . . . . . .
11.4 Schiefe Biegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.4.1 Normalspannung durch Biegung . . . . . . . . . . . . . . . .
11.4.2 Biegelinie . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.5 Querkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.5.1 Flächenmoment 1. Grades . . . . . . . . . . . . . . . . . . .
11.6 Schubspannungsfluss in dünnwandigen Querschnitten . . . . . . . .
11.6.1 Typische Verläufe . . . . . . . . . . . . . . . . . . . . . . . .
11.6.2 Schubspannungsverlauf skizzieren . . . . . . . . . . . . . . .
11.6.3 Maximale Schubspannungen . . . . . . . . . . . . . . . . . .
11.6.4 Schubspannungsverlauf in zusammengebauten Querschnitten
11.6.5 Schubmittelpunkt für offene dünnwandige Querschnitte . . .
11.7 Überlagerte Spannungszustände . . . . . . . . . . . . . . . . . . . .
11.7.1 Dünnwandige Kessel . . . . . . . . . . . . . . . . . . . . . .
11.7.2 Zusammenstellung der Spannungszustände . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
44
44
45
46
46
46
47
47
48
48
49
49
49
51
52
52
52
12 Spannungstransformation
12.1 Richtungstransformation .
12.2 Hauptspannungen . . . . .
12.3 Mohr’scher Spannungskreis
12.4 Maximale Schubspannung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
54
54
54
55
56
13 Dehnungstransformation
13.1 Übersicht . . . . . . . .
13.2 Dehnungsrosetten . . . .
13.3 Materialversagen . . . .
13.3.1 Duktiles Material
13.3.2 Sprödes Material
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
58
58
58
60
60
60
.
.
.
.
61
61
61
61
61
.
.
.
.
62
62
62
63
.
.
.
.
.
14 Energiemethoden und Deformationsenergie
14.1 Deformationsenergie . . . . . . . . . . . . . . . . . . . . . . . . . .
14.2 Satz von Castigliano . . . . . . . . . . . . . . . . . . . . . . . . . .
14.2.1 Kochrezept . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.2.2 Verschiebung an einem Punkt ohne Kraftangriff . . . . . . .
14.2.3 Bestimmen von Lagerkräften am statisch unbestimmten Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.3 Arbeitsgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.3.1 Kochrezept . . . . . . . . . . . . . . . . . . . . . . . . . . .
14.3.2 Statisch bestimmtes Ersatzproblem . . . . . . . . . . . . . .
15 Knickung
64
15.1 Exzentrischer Lastangriff . . . . . . . . . . . . . . . . . . . . . . . . . 65
5
1 Bewegung und Kinematik
Oft ist es hilfreich bei Problemen die Koordinaten zu wechseln, um die Berechnungen zu vereinfachen. Es ist zum Beispiel sehr viel einfacher über einen Kreis zu
integrieren, wenn man zylindrische Koordinaten benutzt.
1.1 Kartesische Koordinaten
r(t) = x(t)ex + y(t)ey + z(t)ez
(1)
ṙ(t) = v(t) = ẋ(t)ex + ẏ(t)ey + ż(t)ez
(2)
|v(t)| =
p
ẋ2 + ẏ 2 + ż 2
(3)
Abbildung 1: Kartesische Koordinaten - http://www.physik.uni-wuerzburg.de
1.2 Zylindrische Koordinaten
r(t) = ⇢(t)e⇢ ('(t)) + z(t)ez
(4)
ṙ(t) = v(t) = ⇢e
˙ ⇢ + ⇢'e
˙ ' + żez
(5)
|v(t)| =
q
⇢˙ 2 + (⇢')
˙ 2 + ż 2
6
(6)
Abbildung 2: Zylindrische Koordinaten - http://www.physik.uni-wuerzburg.de
1.3 Sphärische Koordinaten
r(t) = r(t)er (✓(t), (t))
(7)
˙ + r sin ✓ ˙ e
ṙ(t) = v(t) = ṙer + r✓e
✓
(8)
|v(t)| =
r
⇣ ⌘2 ⇣
⌘2
ṙ2 + r✓˙ + r sin ✓ ˙
Abbildung 3: Sphärische Koordinaten - http://www.physik.uni-wuerzburg.de
7
(9)
1.4 Koordinatentransformationen
Nützlich werden die unterschiedlichen Koordinatensysteme jedoch erst, wenn wir
auch zwischen ihnen wechseln können. Das lässt sich leicht anhand folgender Tabelle
erledigen:
Zylindrisch , Kartesisch
p
⇢ = x2 + y 2 x = ⇢ cos '
= arctan xy
z=z
y = ⇢ sin '
z=z
Sphärisch , Kartesisch
p
x = r sin ✓ cos
r = x2 + y 2 + z 2
p
x2 +y 2
y = r sin ✓ sin
✓ = arctan
z
z = r cos ✓
= arctan xy
1.5 Satz der projizierten Geschwindigkeiten
v 0M = v 0N
,
vM · M N = vN · M N
(10)
Mit der Definition des Skalarproduktes lässt sich diese Gleichung auch in Abhängigkeit der Winkel ↵ und darstellen:
|v M | cos ↵ = |v N | cos
Abbildung 4: Satz der projizierten Geschwindigkeiten
8
(11)
1.6 Allgemeine Starrkörperbewegung
Wichtig! Wir befassen uns mit starren Körpern. Ein Körper heisst starr wenn
der Verbindungsvektor zwischen zwei beliebigen Punkten für jede Bewegung seine
Länge nicht verändert.
Jede Starrkörperbewegung lässt sich eindeutig durch die allgemeine Bewegungsgleichung für Starrkörper beschreiben. Wissen wir die Geschwindigkeit in einem
Punkt B und die Rotationsgeschwindigkeit, können wir die Geschwindigkeit in jedem beliebigen Punkt des Starrkörpers bestimmen. Die beiden Geschwindigkeiten,
die die Bewegung beschreiben werden in der Kinemate zusammengefasst. Die Kinemate im Punkt B lautet: {v B , !}
vM =
vB
|{z}
+
translatorischerAnteil
! ⇥ BM
| {z }
(12)
rotatorischerAnteil
1.6.1 Rotation
Bedingung: Mindestens zwei Punkte eines Starrkörpers in Ruhe
Der Starrkörper führt keine Translation aus (v B = 0), er rotiert lediglich um eine
Drehachse µ. Alle Punkte auf dieser Achse haben dann die Geschwindigkeit 0. Alle
Punkte die nicht auf der Achse liegen, beschreiben Kreisbahnen senkrecht zu µ. Die
Bewegungsgleichung vereinfacht sich zu:
v P = ! ⇥ rµP
! = !eµ
(13)
1.6.2 Translation
Bedingung: Der Verbindungsvektor zwischen zwei beliebigen Punkten hat konstante Richtung und Betrag
Der Starrkörper rotierte nicht ! = 0, sondern hat eine uniforme Geschwindigkeitsverteilung über den gesamten Körper. Die Bewegungsgleichung wird trivial:
vM = vN
9
(14)
1.6.3 Kreiselung
Bedingung: Es gibt einen Punkt des Starrkörpers der in Ruhe ist
Für die Kreiselung gibt es eine momentane Drehachse durch den Punkt in Ruhe
mit Richtung von !. Die Bewegungsgleichung vereinfacht sich in diesem Fall nicht.
1.7 Invarianten der Starrkörperbewegung
Bei einer allgemeinen Starrkörperbewegung gibt es zwei Größen, die am gesamten
Körper gleich groß sind. Da diese Größen sich nicht verändern, werden sie als Invarianten bezeichnet.
1. Invariante:
! = !0
(15)
8B, B 0 2 K
) Jeder Punkt des starren Körpers hat die gleiche Rotationsgeschwindigkeit
2. Invariante:
vB · ! = vM · !
oder
v! =
✓
!
vB ·
|!|
◆
·
!
|!|
(16)
) Die Geschwindigkeit in Richtung der Rotationsachse ist in jedem Punkt des
starren Körpers gleich
Abbildung 5: Invarianten der Starrkörperbewegung - Kolloquium Mech I - Serie 4
10
1.8 Zentralachse
Die Zentralachse ⇣ ist der geometrische Ort aller Punkte, deren Geschwindigkeit
gleich v ! ist. Der starre Körper beschreibt eine Schraubung um diese Zentralachse.
Abbildung 6: Zentralachse - Kolloquium Mech I - Serie 4
1.8.1 Bestimmung der Zentralachse
1. Geg.: B(xB , yB , zB )
Ges.: Z(x, y, z) 2 ⇣
2. Allgemeine Bewegungsgleichung nach den unbekannten Koordinaten auflösen:
0
1
x xB
B
C
B
C
v Z = v ! = v B + ! ⇥ B y yB C
(17)
@
A
z zB
3. Man erhält zwei linear unabhängige Gleichungen
sche Darstellung einer Geraden
0 1
0 1
x
x
B C
B C
B C
B C
⇣ = B y C + ·e⇣ = B y C +
@ A
@ A
z
z
und daraus eine parametri0
1
!
B x C
B
C
· B !y C
@
A
!z
(18)
Hinweis: Eine Koordinate ist frei wählbar, da die Gleichungen linear abhängig
sind!
11
1.9 Satz vom Momentanzentrum
Die Bewegung in der Ebene (2D) ist eine momentane Rotation um das Momentanzentrum Z. Für diesen Fall gelten die vereinfachten Formeln:
vN = ! · r
, mit r = |ZN | und vZ = 0
(19)
Abbildung 7: Satz vom Momentanzentrum
1.9.1 Sonderfälle
• Gleiche Geschwindigkeitsvektoren (v N = v B ) ! Translation (Z im Unendlichen)
• Geschwindigkeitsvektoren sind parallel (v N k v B , aber vN 6= vB )
Abbildung 8: Satz vom Momentanzentrum - Sonderfall
12
1.9.2 Polbahnen
Die Polbahnen geben den geometrischen Ort des Momentanzentrums an. Man unterscheidet zwischen der festen Polbahn und der beweglichen Polbahn.
• Feste Polbahn: Der Ort des Momentanzentrums bezüglich eines raumfesten
Koordinatensystems (xyz)
• Bewegliche Polbahn: Der Ort des Momentanzentrums bezügliches eines körperfesten Koordinatensystems (⇠⌘z)
Abbildung 9: Polbahnen Beispiel
Um die Polbahnen zu bestimmen, befolgt man folgende Schritte:
1. Koordinatensysteme einführen (xyz und ⇠⌘z)
2. Momentanzentrum Z zu einer bestimmten Lage geometrische finden
3. Ort des Momentanzentrums in den gegebenen Koordinaten beschreiben
4. Gleichungen umformen und addieren ) führt meistens zu einer Kreisgleichung
13
1.10 Fachwerke
Mit den Methoden der Kinematik können wir die Bewegung eines Fachwerkes analysieren. Dazu befolgt man folgende Schritte:
1. Starre Körper identifizieren (Platten, Stäbe, Dreiecke von Stäben)
2. Identifikation der Lagerungen (eingespannt, drehbar, drehbar und verschiebbar)
3. !i und Zi für alle starren Körper bestimmen
• Satz vom Momentanzentrum
• Satz der projizierten Geschwindigkeiten
• Parallelogrammregel: gegenüberliegende Stäbe haben im Parallelogramm
gleiches ! (Betrag und Orientierung)
Abbildung 10: Gängige Lagerungen
14
2 Kräfte und Momente
2.1 Definitionen
Mehrere Kräfte können zu einer Kräftegruppe zusammengefasst werden. Die Summe der Einzelkräfte wird als Resultierende bezeichnet
X
R=
Fi
(20)
i
Das Moment einer Kraft F mit Angriffspunkt A bezüglich eines Punktes B
M B = BA ⇥ F = |BA| · |F | · sin ↵
Das Moment einer Kräftegruppe ist die Summe der einzelnen Momente
X
MB =
BAi ⇥ F i
(21)
(22)
i
Das Moment bezüglich eines anderen Punktes P
M P = M B + R ⇥ BP
(23)
M = A1 A2 ⇥ F 2 = A2 A1 ⇥ F 1
(24)
P = R · vM + M B · !
(25)
Zwei parallele Kräfte mit F1 =
und erzeugen ein Moment
F2 ! R = 0 werden als Kräftepaar bezeichnet
Greifen Kräfte oder Momente an bewegten Körpern an erzeugen sie Leistung
2.2 Reduktion einer Kräftegruppe
Eine Kräftegruppe wird durch ihre Dyname {R, MB } ganzheitlich beschrieben
(analog zur Kinemate eines Bewegungszustandes).
Eine Kräftegruppe hat zwei Invarianten:
1. Die Resultierende: R
2. Skalarprodukt aus Kraft und Moment: R · M A = R · M B
2.3 Statische Äquivalenz
Die beiden Kräftegruppen {G} und {G0 } sind genau dann statisch äquivalent, wenn
ihre Resultierende R und die Momente MB bezüglich eines Punktes B gleich sind.
15
2.4 Zentralachse
1. Geg.: B(xB , yB , zB )
Ges.: Z(x, y, z) 2 ⇣
2. Bestimme M (R)
M
(R)
=
✓
R
MB ·
|R|
◆
·
R
|R|
(26)
3. Löse die Gleichungen nach x, y, z auf
M Z = M (R)
0
x
B
B
= M B + R ⇥ BZ = M B + R ⇥ B y
@
z
xB
1
C
C
yB C
A
zB
(27)
4. Man erhält zwei linear unabhängige Gleichungen und daraus eine parametrische Darstellung einer Geraden
0 1
0 1
0 1
x
x
R
B C
B C
B xC
B C
B C
B C
) ⇣ = B y C + · e⇣
bzw. ⇣ = By C + · BRy C
(28)
@ A
@ A
@ A
z
z
Rz
Hinweis: Eine Koordinate ist frei wählbar, da die Gleichungen linear abhängig
sind!
2.4.1 Sonderfälle
1. Eine Kräftegruppe lässt sich auf eine Einzelkraft reduzieren, wenn M (R) )
R·M =0
2. M B steht immer senkrecht auf R
2.5 Linienverteilte Kräfte
Im Allgemeinen greifen Kräfte nicht immer nur an genau einem Punkt an. Oft ist
es der Fall, dass eine Kraft über ein gewisses Gebiet verteilt ist (z.B. Eigengewicht,
etc.). Es ist jedoch hilfreich, diese verteilten Kräfte auf eine Einzelkraft zu reduzieren,
da es sich mit einzelnen Kräften besser rechnen lässt.
16
Die Resultierende R und das Moment M der linienverteilten Kraft s(x) erhält
man durch Integration über den Stab
Z L
Z L
R=
s(x)dx
M=
x · s(x)dx
(29)
0
0
Der Angriffspunkt der Kraft lässt sich dann wie folgt bestimmen
Z
1 L
xs =
x · s (x) dx
R 0
(30)
2.5.1 Sonderfälle
1. Gleichförmige Verteilung (s(x) = s0 = const.) ) xs = L2 , R = L · s0
2. Dreiecksverteilung (s(x) =
x
L
· s0 ) ) x s =
2L
,R
3
=
L·s0
2
Abbildung 11: Linienverteilte Kräfte
2.6 Seilkräfte
Beim Freischneiden von Seilen (eliminieren der Seile durch Einführen der Seilkräfte)
werden Seilkräfte immer als Zugkräfte eingeführt:
Abbildung 12: Beispiel Seilkraft Freischnitt
Seilkräfte sind immer positiv, ansonsten sind Seile nicht straff!
17
3 Reibung
In der Realität sind Körper nicht reibungsfrei. Wir unterscheiden grundlegend zwei
Arten von Reibung: Haftreibung und Gleitreibung
3.1 Haftreibung
|H| µ0 · N,
µ0 : Haftreibungszahl
(31)
Diese Ungleichung besagt, dass der Körper haftet, sich also nicht in Bewegung
setzt, solange die Haftreibung unter einer bestimmten Grenze liegt.
Vorgehen:
1. System abgrenzen
2. geeignetes Koordinatensystem einführen
3. Lagerreaktionen eintragen
4. Flächenpaare, die aufeinander gleiten können, identifizieren und Haftreibungskräfte als unbekannte Grösse einführen
5. Gleichgewichtsbedingungen formulieren wie bei normalen Statikaufgaben
6. H in Haftungsbedingung einsetzen, Ungleichung auflösen und zulässigen Wertebereich für H angeben
3.2 Gleitreibung
|FR | = µ1 |N |, ,
µ1 : Gleitreibungszahl
(32)
Ist der Körper in Bewegung und gleitet reibungsbehaftet auf einer Ebene, ist die
Gleitreibung proportional zur Normalkraft.
Vorgehen:
1. System abgrenzen
2. geeignetes Koordinatensystem einführen
3. Lagerreaktionen eintragen
4. Flächenpaare die aufeinander gleiten können, identifizieren und Gleitreibungskraft als bekannte Größe entgegen der Bewegungsrichtung einführen
5. Gleichgewichtsbedingungen formulieren
18
4 Zahnradsysteme
Gelegentlich kommen Systeme mit über Zahnräder verbundenen Wellen vor. Dabei
gelten für zwei ineinandergreiffende Zahnräder mit Radien r1 und r2 und Winkelgeschwindigkeiten !1 und !2
Gleiche Geschwindigkeit am Berührungspunkt:
Gleiche Leistung an den Zahnrädern:
!1 · r1 = !2 · r2
!1 · T1 = !2 · T2
(33)
(34)
1
Beachte, oft ist die Frequenz (f , [ sec
]) einer Welle gegeben, dann gilt:
! = 2⇡ · f
19
(35)
5 Statik
Der Hauptsatz der Statik besagt, dass die Summe aller äußeren Kräfte und Momente eines Systems gleich null ergeben müssen, damit das System in Ruhe ist.
R(a) = 0
und
(a)
MO = 0
(36)
5.1 Statik-Aufgaben lösen
Die meisten aller Aufgaben aus dem Bereich Statik lassen sich anhand dieses Rezeptes gut lösen
1. System abgrenzen
2. Koordinatensystem einführen, wenn noch nicht gegeben (möglichst parallel zu
den Kräften)
3. Lagerreaktionen eintragen (siehe Kapitel Freischneiden)
4. Ist das System statisch bestimmt? Können wir das System trennen?
5. Gleichgewichtsbedingungen aufstellen R = 0, M = 0 und Gleichungssystem
lösen
6. Diskussion der Lösung (Abheben, Gleiten, Kippen, etc. )
5.2 Statische Bestimmtheit
Für die statische Bestimmtheit muss die Anzahl der Gleichungen aus den Gleichgewichtsbedingungen mit der Anzahl der unbekannten Lagerkräfte übereinstimmen.
Bei einem 2D Problem erhalten wir 3 Gleichungen, bei einem 3D Problem erhalten
wir 6 Gleichungen.
Wir unterscheiden 3 Fälle:
• Statisch bestimmt: Wir haben genauso viele Gleichungen wie Unbekannte
• Statisch unbestimmt: Wir haben mehr Unbekannte als Gleichungen
• Statisch überbestimmt (Mechanismus): Wir haben mehr Gleichungen als Unbekannte
20
5.3 Standfestigkeit
Oft stellt sich bei einem Problem die Frage, ob das gegebene System stabil ist, oder
ob z.B. der Körper kippen wird bei den angreifenden Kräften.
Beispiel:
Nach dem Freischnitt erhalten wir folgende Skizze des Problems
Abbildung 13: Beispiel Standfestigkeit
Damit das System stabil ist, müssen gewisse Bedingungen erfüllt sein:
• e > 0 und e < a: Die Normalkraft muss innerhalb der Standfläche angreifen
• N > 0: Die Normalkraft muss positiv sein, da der Boden nicht am dem Körper
ziehen kann (N ist hier als Druckkraft eingeführt)
21
5.4 Lagerkräfte
Für Aufgaben aus dem Bereich der Statik ist es entscheidend, wie eine System gelagert ist. Je nach Lagerung müssen wir unterschiedliche Kräfte und Momente einführen. Hier sind die gängigsten Lagerungen dargestellt und welche Lagerreaktionen
sie hervorrufen
Abbildung 14: Typische Lagerungen und Lagerreaktionen
5.5 Ideale Fachwerke
Wir betrachten bei Fachwerken sogenannte ideale Fachwerke. Diese haben folgende
Eigenschaften
• alle Knoten sind reibungsfreie Gelenke
• die Stäbe werden als masselos angenommen
• alle Knoten befinden sich am Ende von Stäben
• alle Lasten greifen nur an den Knoten an
Um diese Art von Aufgaben zu lösen gibt es 3 Verfahren, um die Stabkräfte zu
bestimmen
1. Prinzip der Virtuellen Leistung
2. Knotengleichgewicht
3. Drei-Kräfte-Schnitt
22
5.5.1 Prinzip der virtuellen Leistung (PdvL)
1. Entferne Stab aus dem Fachwerk und führe an dieser Stelle 2 Stabkräfte als
Zugkräfte ein
2. Führe nun eine zulässige (!) virtuelle Bewegung ein (zulässig = die Bewegung
muss mit den kinematischen Bedingungen der Lager verträglich sein)
3. Bestimme nun die Geschwindigkeit in den Punkten, in denen Kräfte wirken
4. Berechne nun die Einzelleistungen der Kräfte
5. Aus dem PdvL folgt: Ptot = 0, löse dann nach der Stabkraft auf
Zur Erinnerung:
P = F · v B = |F | · |v B | · cos ↵
| {z } |
{z
}
vektoriell
skalar
↵ ist der Winkel zwischen Kraft und Geschwindigkeit. Die Leistung kann je nach
Winkel ↵ negativ werden !
Abbildung 15: Beispiel - Prinzip der virtuellen Leistung
23
5.5.2 Knotengleichgewicht
1. Lagerkräfte bestimmen am gesamten System
2. Einzelne Knoten betrachten und Kräfte eintragen (Stabkräfte in Richtung der
Stäbe)
3. Gleichgewichtsbedingung am Knoten aufstellen (R = 0, M = 0)
4. Gleichungssystem lösen
Abbildung 16: Beispiel - Knotengleichgewicht
5.5.3 Drei-Kräfte-Schnitt
1. Lagerkräfte bestimmen am gesamten System
2. 3 (!) Stäbe schneiden und Stabkräfte einführen
3. Momentengleichgewicht am Schnittpunkt zweier unbekannter Kräfte aufstellen
4. Kräftegleichgewicht um restlich Stabkräfte zu bestimmen
Abbildung 17: Beispiel - Drei-Kräfte-Schnitt
24
6 Beanspruchung
Für das Thema der Beanspruchung ist es sehr wichtig zu beachten, dass die Vorzeichenkonvention für Mechanik II geändert wurde. Die allgemeinen Aussagen in
diesem Kapitel behalten für beide Konventionen ihre Gültigkeit. Es muss nur bei
den Vorzeichen der unterschiedlichen Beanspruchugskomponenten aufgepasst werden. Die genauen Unterschiede werden in Kapitel 6.5 dargestellt.
Wirken auf einen Stab Kräfte, entstehen innerhalb des Stabes die Beanspruchungskomponenten. Diese sind sinnvoll zu analysieren, da wir so sagen können, ob und
wo der Stab möglicherweise brechen wird. Im allgemeinen 3D Fall gibt es 6 Beanspruchungskomponenten:
1. Normalkraft N : Beanspruchung auf Zug (N > 0) oder Druck (N < 0)
2. Querkräfte Qy , Qz : Beanspruchung auf Schub
3. Torsionsmoment T : Beanspruchung auf Torsion
4. Biegemomente My , Mz : Beanspruchung auf Biegung
Abbildung 18: Beanspruchungskomponenten im 2D-Fall
25
6.1 Differentialbeziehungen
Gelten für gerade Stabträger!
q steht für die Kraftverteilung (s. verteilte Kräfte aus Semester I)
d
Qy =
dx
qy
d
Mz =
dx
d
Qz =
dx
qz
d
My = Q z
dx
Qy
d2
M z = qy
dx2
d2
My =
dx2
qz
(37)
(38)
6.2 Vorgehen für Beanspruchung
1. Klassfiziere (2D oder 3D) und schneide das System frei ) Lagerkräfte, evtl.
Systemtrennung
2. Drücke verteilte Lasten als Funktion der Länge aus
3. Identifiziere die Lasten und definiere Abschnitte. Schnitte vor/nach Einzellast,
vor/nach/ innerhalb verteilter Lasten
4. Schneide die Teilabschnitte, am Schnittpunkt Beanspruchungskomponenten
einführen (Rechtssystem), führe Laufvariable in Richtung Schnittpunkt ein
5. Gleichgewicht an jedem Teilsystem. Bezugspunkt für Momente immer(!) den
Schnittpunkt wählen
26
6.3 Beanspruchung an gekrümmten Balken
6.3.1 Polarkoordinaten
Bei gekrümmten Balken lohnt es sich, einen Koordinatenwechsel vorzunehmen, um
die Berechnungen zu vereinfachen.
x = r · cos '
y = r · sin '
Bei konstanten Radius R ergibt sich das Integral
Z '
. . . ds
mit ds = R · ↵
(39)
(40)
0
6.3.2 Beanspruchungskomponenten
Die Richtung der Beanspruchungskomponenten ist von der neuen Laufvariable '
abhängig.
Abbildung 19: Beanspruchungskomponenten am gekrümmten Balken
6.3.3 Vorgehen
1. Lagerkräfte bestimmen
2. Balken schneiden und neue Laufvariable ' einführen
3. Beanspruchungskomponenten einführen
4. Kräfte- und Momentengleichgewicht aufstellen. Bei der Integration eine neue
Integrationsvariable ↵ einführen und von 0 bis ' integrieren
27
6.4 Beanspruchungsdiagramme
Die Beanspruchungsdiagramme lassen sich anhand geeigneter Diagramme graphisch
darstellen. Diese Darstellung vereinfacht es, die Stelle mit der kritischen Beanspruchung zu lokalisieren.
Lastfall
Einfluss auf Querkraft
Einfluss auf Biegemoment
-
Sprung
Einzelkraft
Sprung
Linear / Knick
Gleichförmige Kraftverteilung
Linear
Quadratisch
Quadratisch
Kubisch
Einzelmoment
Dreieckverteilung
6.4.1 Beispiel für ein Beanspruchungsdiagramm
Abbildung 20: Beanspruchungsdiagramm
28
6.5 Vorzeichenkonventionen
In diesem Unterkapitel werden kurz die unterschiedlichen Vorzeichenkonventionen
dargestellt und worauf geachtet werden muss, für die darauf aufbauenden Formeln.
Der zentrale Unterschied besteht im verwendeten Koordinatensystem, welches wir
einführen. In Mechanik I wird das Koordinatensystem mit der y-Richtung nach unten
eingeführt, bei Mechanik II nach oben. Für beide Fälle gilt: alle Momente werden
in die jeweils positive Richtung eingeführt. Die Querkraft wird positiv nach unten
eingeführt. Ein kleiner Unterschied besteht in der Bezeichnung der Querkraft (Q:
Mechanik I, V : Mechanik II).
Abbildung 21: Unterschiedlichen Vorzeichenkonventionen für die
Beanspruchungskomponenten.
Oben: Mechanik I, Unten: Mechanik II
Durch die unterschiedliche Einführung des Biegemomentes ändern sich auch die
Vorzeichen für die Differentialbeziehungen der Beanspruchungskomponenten. Für
Mechanik II gilt mit w als verteilte Last mit positiver Richtung nach oben:
dV
=
dx
w
dM
=V
dx
29
d2 M
=
dx2
w
(41)
7 Spannung / Stress
Die Spannung ist definiert als Kraft pro Fläche. Diese Definition ermöglicht es uns,
unabhängig vom Querschnitt des betrachteten Systems die Belastung zu bestimmen.
Für den Spannungsvektor in einem beliebigen Punkt P einer Schnittebene gilt:
s=
·n+⌧ ·t
(42)
Wir zerlegen den Spannungsvektor in die Normalspannung (normal stress)
senkrecht zu der Schnittebene und die Schubspannung (shear stress), welche
tangential zur Schnittebene verläuft.
Abbildung 22: Spannungsvektor Übungsheft zu Mechanik I und II, Udo Lang +
Bernard Masserey + Istvan A. Veres, S.199, Abb. 9.1
Für den allgemeinen Fall, dass wir den Körper in allen drei Ebenen zu einem
Würfel schneiden, erhalten wir den allgemeinen Spannungszustand (general
state of stress). Dieser ist charakterisiert durch 6 Spannungskomponenten.
7.1 Normalspannung
Wird zum Beispiel ein Stab in axialer Richtung belastet, wird die Kraft gleichmässig
über den Querschnitt verteilt und die entsprechende Spannung ergibt sich aus
N
(43)
A
wobei die durchschnittliche Normalspannung, N die resultierende innere Kraft
(Beanspruchung) und A die Querschnittsfläche ist.
=
30
Abbildung 23: Allgemeiner Spannungszustand Mechanics of Materials, S.23, Abb.
1.12
7.2 Schubspannung
Die durchschnittliche Schubspannung, die sich in einem belasteten Körper entwickelt, ist analog zur Normalspannung definiert, wobei nicht mehr die Normalkraft,
sondern die Schubkraft V die entsprechenden Spannungen induziert.
V
(44)
A
Damit ein Volumenelement im statischen Gleichgewicht ist, entwickeln sich auch
die sogenannten zugeordneten Schubspannungen.
⌧avg =
7.3 Sicherheitsfaktor
Ein wichtiger Parameter für die Auslegung von Bauteilen ist der sogenannte Sicherheitsfaktor (factor of safety F.S.). Er gibt das Verhältnis an, von erlaubter
Kraft die an einem Bauteil wirken darf (Fallow ) zu der Kraft, bei der das Bauteil
versagen wird (Ff ail ).
F.S. =
Ff ail
Fallow
31
(45)
8 Dehnung / Strain
8.1 Dehnung bei gegebenem Verschiebungsfeld
Bisher haben wir nur starre Körper betrachtet. Durch äußere Belastungen können
deformierbare Körper ihre Form verändern. Die so entstandenen Verschiebungen
werden durch das Verschiebungsfeld beschrieben:
0
1
u (x, y, z)
B x
C
B
C
u = B uy (x, y, z) C
@
A
uz (x, y, z)
Durch partielles Ableiten der einzelnen Komponenten des Verschiebungsfeldes nach
x, y, z erhält man die Dehnungen.
"x = ux,x
"y = uy,y
"z = uz,z
(46)
Die Dehnung bezieht sich immer auf eine Richtung, d.h. ein infinitesimales Längenelement in die jeweilige Richtung. Somit drückt "x z.B. aus, um wieviel sich ein
Längenelement in x-Richtung verändert.
Abbildung 24: Verschiebungsvektoren
8.2 Schubverzerrung bei gegebenem Verschiebungsfeld
Die durch die Deformation entstandene Winkeländerungen lassen sich ebenfalls aus
dem Verschiebungsfeld bestimmen
xy
= 2"xy = (ux,y + uy,x )
(47)
xz
= 2"xz = (ux,z + uz,x )
(48)
yz
= 2"yz = (uy,z + uz,y )
(49)
32
Abbildung 25: Verzerrungswinkel
Diese Grössen beziehen sich erneut auf Richtungen, genauer, auf den von zwei
Richtungen eingeschlossenen Winkel. Dieser Winkel wird jeweils um verringert,
also wird z.B. der Winkel zwischen der x- und y-Richtung um xy reduziert. Für die
Vorzeichen der Winkelveränderungen gilt:
8
< > 0 : Winkelverkleinerung
=
xy
: < 0 : Winkelvergrößerung
Zusätzliches
Die Dehnung kann neben den obigen Definitionen auch anders bestimmt werden.
Angenommen, man habe einen Stab der Länge L0 und belastet diesen in axialer
Richtung. Der Stab wird sich je nach Belastung entweder verkürzen oder verlängern
und nachdem die Last angegriffen hat, eine neue Länge L haben. Die Dehnung ist
nun das Verhältnis aus der Verlängerung = L L0 zu der ursprünglichen Länge.
L
L0
=
(50)
L
L0
Aus der obigen Gleichung ist es auch ersichtlich, dass die Dehnung positiv ist für
den Fall einer Verlängerung des Stabes und negativ ist für den Fall einer Stauchung
des Stabes.
"=
33
9 Mechanische Eigenschaften von Materialien
Das folgende Kapitel gibt einen Überblick über die Beziehungen zwischen Spannungen und Dehnungen und wie diese aus Experimenten bestimmt werden können.
9.1 Spannungs-Dehnungs-Diagramm
Das Spannungs-Dehnungs-Diagramm kann man relativ einfach mit dem sogenannten
Zugversuch bestimmen. Dabei beobachtet man verschiedene Stadien, die ein Stab
während wachsender Belastung durchläuft. In dieser Vorlesung sind hauptsächlich
die ersten zwei von vier Stufen von Relevanz.
Linear Elastischer Bereich (elastic region): Das Material verhält sich wie
der Name schon sagt, linear elastisch. Das bedeutet zum einen, dass die Spannung
linear proportional zu der Dehnung ist. Die Proportionalitätskonstante nennt man
Elastizitätsmodul (Young’s Modulus).
=E·"
(51)
Solange man einen Körper nur in dem linear elastischen Bereich beansprucht und
die Last dann wieder wegnimmt, wird der Körper in seine ursprüngliche Form zurückkehren!
Fliessen (Yielding): Wird ein Material über seine Fliessspannung y beansprucht, fängt es an, sich plastisch zu verformen und wird nicht mehr in seine ursprüngliche Form zurückkehren, wie im elastischen Bereich. Oft wird ein Material
als elastisch - perfekt plastisch angenommen. Das bedeutet, dass dieses Material
nur eine maximale Spannung von y aufnehmen kann und die Spannungs-Dehnungs
Kurve danach einer Horizontalen entspricht.
9.2 Poisson Zahl
Angenommen wird haben einen Stab und belasten diesen in axialer Richtung mit
einer Kraft F. Der Stab wird sich verlängern, aber zusätzlich werden sich auch seine
Dimensionen quer zur Belastung verändern. Die Poisson Zahl gibt das Verhältnis
zwischen longitudinaler und lateraler Verformung an und hat typischerweise Werte
zwischen 0 und 0.5.
⌫=
"lat
"long
(52)
Das Minus in der Gleichung ist lediglich aus dem Grund, um eine positive Zahl zu
erhalten, da die Vorzeichen von "lat und "long entgegengesetzt sind. Das ergibt Sinn,
34
Abbildung 26: Links: Elastisch perfekt plastisches Verhalten http://www.
apicsllc.com/apics/Sr_9/Image2676.gif. Rechts: Belastung
bis in den plastischen Bereich. Danach wird der Körper entlastet und
es bleibt eine Restdehnung (permanent set) bestehen (Mechanics of
Materials, S. 114).
da eine Verlängerung ("long > 0) des Stabes zu einer Verdünnung ("lat < 0) führt
und eine Verkürzung ("long < 0) zu einer Verdickung ("lat > 0) führt.
9.3 Schubspannung-Schubdehnungs-Diagramm
Analog zu dem Spannungs-Dehnungs-Diagramm in normaler Richtung kann auch
die Schubspannung mit der Schubdehnung verknüpft werden. Die Proportionalitätskonstante wird als Schubmodul G bezeichnet.
⌧ =G·
(53)
Das Schub- und Elastizitätsmodul können über die Poisson Zahl miteinander verknüpft werden.
G=
E
2(1 + ⌫)
35
(54)
10 Flächenträgheitsmomente 2. Grades
Die Flächenträgheitsmomente 2. Grades geben Aufschluss darüber, wie beständig
ein Querschnitt gegen Biegung oder Torsion ist.
10.1 Biegung
Will man die Biegebeständigkeit eines Querschnittes bestimmen benutzt man folgende Formeln:
Iy =
ZZ
2
z dA
und
Iz =
ZZ
y 2 dA
(55)
Wobei Iy die Biegebeständigkeit beschreibt, wenn der Querschnitt mit einem Biegemoment in y-Richtung beansprucht wird, und Iz bei einem Biegemoment in zRichtung.
Für das Deviationsmoment gilt:
Cyz =
ZZ
yzdA
(56)
10.2 Torsion
Wird ein kreiszylindrischer Querschnitt auf Torsion belastet, nutzt man nicht Iy und
Iz , sondern das polare Flächenträgheitsmoment Ip
ZZ
ZZ
2
2
Ip =
y + z dA = Ip =
r2 dA = Iy + Iz
(57)
10.3 Hauptrichtungen
Die Hauptrichtungen der Flächenträgheitsmomente lassen sich mit einem Tensor
bestimmen (analog zu Spannungs- und Dehnungstensor). Hierbei ist jedoch zu beachten, dass die Flächenträgheitsmomente immer positiv sind und der Tensor nur
zweidimensional ist. Für einfache Querschnitte entsprechen die Hauptrichtungen den
36
Symmetrieachsen.
2
I=4
Iy
Cyz
Cyz
Iz
3
5
(58)
10.4 Verschiebungssatz nach Huygens
Die Flächenträgheitsmomente sind abhängig von der Wahl des Bezugspunktes. Der
Verschiebungssatz nach Huygens stellt einen einfach Zusammenhang zwischen den
Flächenträgheitsmomenten bezüglich zweier paralleler Achsen z, ⇣ mit Abstand y =
yQ her.
I⇣ = Iz + (yQ )2 A
(59)
I⌘ = Iy + (zQ )2 A
(60)
C⌘⇣ = Cyz
yQ z Q A
(61)
Abbildung 27: Zum Verschiebungssatz nach Huygens Ingenieurwissenschaften 2,
zweite Auflage, Vieweg+Teubner Verlag, Wiesbaden 2009, Seite 109,
Fig. 19.7
10.5 Flächenmittelpunkt
Für viele Probleme brauchen wir von einem gewissen Querschnitt den Flächenmittelpunkt. Bei einfachen Querschnitten ist der Flächenmittelpunkt meist anhand geometrischer Überlegungen zu bestimmen. Für komplexere Querschnitte (z.B. Halbkreis)
ist das nicht immer so einfach. Allgemein gilt:
ZZ
1
⌘s =
⌘dA
(62)
A
Setzt sich ein Querschnitt aus mehreren einfachen Querschnitten mit bekanntem
Flächenmittelpunkt zusammen, vereinfacht sich das Integral zum gewichteten Mittel
der Teilflächenmittelpunkte.
37
A1 · ⌘1 + · · · + An · ⌘n
(63)
A1 + · · · + An
Die Variable ⌘ steht allgemein für eine beliebige Koordinate. An steht für die
Fläche des Teilquerschnittes und ⌘n ist der Abstand vom Mittelpunkt der Teilfläche
zum (frei wählbaren) Ursprung des Koordinatensystems.
⌘s =
10.6 Vorgehen: Berechnung von Flächenträgheitsmomenten
1. wähle ein geeignetes (beliebiges) Koordinatensystem
2. bestimme den Flächenmittelpunkt bzw die Teilflächenmittelpunkte durch
• (einfach) geometrische Überlegungen
• (mittel) vereinfachtes gewichtetes Mittel (63)
• (schwierig) integrales gewichtetes Mittel (62)
3. berechne die Teilflächenträgheitsmomente bezogen auf den Gesamtflächenmittelpunkt
• (einfach) Teilflächenmomente aus Tabellen, Bezugspunktwechsel mit Verschiebungssatz nach Huygens
• (mittel) Teilflächenmomente durch lösen der Integrale, Bezugspunktwechsel mit Verschiebungssatz nach Huygens
• (schwierig) Teilflächenmomente mit direktem Bezugspunktwechsels durch
lösen der Integrale mit geeigneten Grenzen
4. Das Flächenträgheitsmoment der Gesamtfläche entspricht der Summe aller
Teilflächenmomente mit Bezugspunkt im Gesamtflächenmittelpunkt.
38
11 Belastungsfälle
Im folgenden Kapitel werden die unterschiedlichen typischen Belastungsfälle dargestellt. Zu jedem Belastungsfall werden die typischen Formeln erklärt und etwaige
Ausnahmen betrachtet.
11.1 Axiale Belastung
11.1.1 Elastische Deformation
Unter der Annahme, dass wir einen Stab nur elastisch verformen kann man aus
den Formeln (43) und (51) eine Beziehung herleiten für die Verschiebung in axial
belasteten Stäben (allgemeiner Fall).
Z L
N (x)
=
dx
(64)
0 A(x)E
Hierbei bezeichnet L die Länge des Stabes, N (x) die Normalkraft im Stab, A(x)
den (sich möglicherweise verändernden) Querschnitt und E wie immer das Elastizitätsmodul. Für den Fall, dass sich Querschnitt und Normalkraft über den Balken
oder Bereiche dessen nicht verändern, kann man auch mit der vereinfachten Formel
rechnen.
=
X NL
i
AE
(65)
Generell gilt für die Vorzeichen der Verschiebung und der Normalkraft. , N > 0:
Verlängerung und Zuglast, , N < 0: Stauchung und Drucklast.
Mit Gleichung (64) können wir nun auch statisch unbestimmte Probleme lösen
(DER grosse Unterschied zu Mechanik I)! Kennen wir die Verschiebung in einem
Punkt des Stabes, erhalten wir also eine zusätzliche Gleichung und können so unser
Gleichungssystem (mit den Lagerkräften als Unbekannte) lösen.
11.1.2 Spannung durch Temperaturunterschiede / Thermal Stress
Deformationen eines Körpers können nicht nur durch mechanische Belastung hervorgerufen werden, sondern auch durch Temperaturänderungen, da sich Körper im
Allgemeinen bei steigender Temperatur ausdehnen. Diese Verlängerung ist proportional zur Länge des Körpers L, der Temperaturänderung T und einem materialspezifischen Parameter ↵, dem sogenannten Temperaturausdehnungskoeffizienten.
39
T
= ↵ TL
(66)
Handelt es sich um ein statisch bestimmtes Problem, kann die Verschiebung durch
die obige Gleichung leicht bestimmt werden. Ist das Problem allerdings statisch unbestimmt, kann sich der Stab nicht frei ausdehnen und es kommt zu inneren Spannungen.
11.1.3 Spannungsspitzen / Stress Concentrations
Kommt es zur plötzlichen Querschnittsänderungen über die Länge des Stabes entstehen sogenannte Spannungsspitzen. Die maximalen Spannungen kann man dann
bestimmen über:
K=
max
(67)
avg
wobei avg die Normalspannung nach (43) ist und K der sogenannte stressconcentration factor. Für zwei typische Querschnittsänderungen kann man den
Wert für K aus den folgenden Diagrammen ablesen. Die Diagramme muss man lesen
können, aber nicht auf eine Formelsammlung kopieren.
Abbildung 28: Stress-concentration factor diagrams (Mechanics of Materials S.161)
40
11.2 Torsion
11.2.1 Spezifischer Verdrehungswinkel
Der spezifische Verdrehungswinkel #0 gibt die spezifische Verdrehung, also die Verdrehung pro Längenelement an. Er beschreibt somit die Steigung der Verdrehung
des Querschnittes an der Stelle x.
Abbildung 29: spezifische Verdrehung, Übungsheft zu Mechanik I und II, Udo Lang
+ Bernard Masserey + Istvan A. Veres, S.176, Abb. 18.3
#0 (x) =
T (x)
G · Ip
(68)
wobei G das Schubmodul des Materiales und T (x) das Torsionsmoment an der Stelle
x ist.
11.2.2 Absolute Verdrehung
Aus dem spezifischen Verdrehungswinkel lässt sich durch Integrieren die absolute
Verdrehung [rad] bestimmen.
Allgemein gilt:
#(x) =
Zx
(69)
0
T (x)
dx
G · Ip
ZL
T (x)
dx
G · Ip
(70)
An der Stelle L ausgewertet:
#(L) =
0
wobei L die Gesamtlänge des betrachteten Balkens ist.
41
Daraus resultiert für einen Balken mit durchgehend gleichem Querschnitt und
Torsionsmoment folgende absolute Verdrehung.
#(L) =
TL
GIp
(71)
Hinweis: Will man z.B. die absolute Verdrehung einer abgestuften Welle berechnen, lässt sich mit Hilfe der Formel (71) die Additivität der Teilverdrehungen der
einzelnen Abschnitte beweisen (siehe oranges Übungsheft Seite 177).
11.2.3 Schubspannung durch Torsion
Achtung! Folgende Betrachtungen gelten NUR für Kreisquerschnitte (Ring und
Vollquerschnitte) und können nicht auf allgemeine Querschnitte übertragen werden.
In einem Kreisquerschnitt treten infolge Torsion folgende Schubspannungen auf:
⌧'x (r) =
T
r
Ip
(72)
Abbildung 30: Schubspannungsverteilung am Kreisquerschnitt, Übungsheft zu Mechanik I und II, Udo Lang + Bernard Masserey + Istvan A. Veres,
S.175, Abb. 18.2
T bezeichnet das am Querschnitt angreifende Torsionsmoment und r den Abstand
zur Neutralachse (also Mittelpunkt des Kreisquerschnittes).
11.2.4 Statisch Unbestimmte Torsionsprobleme
Analog zur den statisch unbestimmten Problemen mit axialer Last, können wir nun
durch Gleichung (69) weitere Gleichungen finden, um unser Gleichungssystem mit
unbekannten Lagerkräften / -momenten zu lösen. Sind zwei Stäbe durch Zahnräder
verbunden, muss eine zusätzliche Gleichung erfüllt sein.
r 1 #1 = r 2 #2
42
(73)
11.2.5 Leistungsübertragung
Wie aus Mechanik I (PdvL) muss man Leistung aufwenden, um einen Körper zu
drehen, an dem ein Moment wirkt. Die benötigte Leistung ist gegeben durch:
P = T ! = 2⇡f T
(74)
Wobei T das wirkende Moment ist, ! die Kreisfrequenz [rad/s] und f die Frequenz
[Hz = 1/s] ist.
11.2.6 Geschlossene dünnwandige Querschnitte
Für geschlossene dünnwandige Querschnitte (unabhängig von der Geometrie: Kreis,
Rechteck, etc.) gelten besondere Regeln für die Schubspannungen. Man kann zeigen,
dass der Schubfluss q konstant über den kompletten Querschnitt ist.
q = ⌧avg t
(75)
Wobei t die Dicke des Querschnitts bezeichnet. Aus dieser Gleichung sieht man
schnell, dass die Spannungsspitzen an Stellen auftreten, wo die Dicke am geringsten
ist. Die entsprechende Schubspannung erhält man aus der folgenden Gleichung.
T
(76)
2tAm
Hier bezeichnet T das wirkende Torsionsmoment, t die Dicke an der Stelle, wo
⌧avg ausgewertet werden soll und Am ist die Fläche, die durch den Querschnitt eingeschlossen wird. Die Richtung der Schubspannungen ist immer tangential an der
Oberfläche des Querschnitts.
⌧avg =
11.2.7 Spannungsspitzen
Analog zu den Spannungsspitzen in axial belasteten Stäben gibt es auch bei torsionsbelasteten Querschnitten den stress-concentration factor K. Ein Beispiel für
Werte von K findet man im Buch Mechanics of Materials auf Seite 234.
11.3 Spezielle Biegung
Wird ein Stab auf Biegung beansprucht und zeigt das Biegemoment in eine der
Hauptrichtung des Querschnittes spricht man von spezieller Biegung.
43
11.3.1 Normalspannung durch Biegung
Auch wenn nur ein Biegemoment an einem Stab wirkt, entstehen innerhalb des
Stabes Druck- und Zugspannungen. Diese entstehen dadurch, dass z.B. der obere Teil
des Querschnittes auseinander gezogen und der untere Teil zusammengedrückt wird.
Die resultierenden maximalen Spannungen lassen sich folgendermaßen bestimmen:
x,Biegung
=
Mb,max (x)
· ymax
Iz
(77)
Abbildung 31: Spannung durch Biegung, Musterlösung SÜ8 - Mechanik II
Im Querschnitt gibt es eine Linie, die keine Normalspannung erfährt (
y = 0). Diese Linie wird Neutralachse genannt.
x
=0!
Wird die Biegung zusätzlich mit einer Normalkraft überlagert (N 6= 0), ändert
sich der Betrag der maximalen Normalspannung
N
Mb,max (x)
· ymax
A
Iz
Die Neutralachse verschiebt sich durch diese zusätzliche Beanspruchung
x,max
=
yn =
N · Iz
Mb · A
(78)
(79)
11.3.2 Biegelinie
Durch die Biegung wird der Stab eine vertikale Verschiebung v(x) erfahren. Beachte,
dass die positive v(x) Richtung in positiver y-Richtung, also nach oben ist. Die
Verschiebung wird beschrieben durch die Differentialgleichung:
v 00 (x) =
Mb (x)
EIz
44
(80)
Durch zweifache Integration erhält man endgültig die Verschiebung. Allerdings
erhalten wir auch zwei Integrationskonstanten, welche wir durch Randbedingungen
bestimmen müssen.
Durch einsetzen der Differentialbeziehung ergeben sich zusätzlich:
d3 v
V (x)
=
3
dx
EIz
4
dv
w(x)
=
4
dx
EIz
(81)
(82)
11.3.3 Vorgehen: Berechnung der Biegelinie
1. Bestimme aus der Beanspruchung Mb (x)
2. Berechne für den Querschnitt Iz
R
R
3. Integriere die DGL v 0 = v 00 dx = EI1 z Mb (x)dx + C1
⇤
R
R ⇥R
4. Integriere die DGL v = v 0 dx = EI1 z
Mb (x)dx dx + C1 x + C2
5. Bestimme C1 , C2 mit Rand- und Übergangsbedingungen:
• v = 0 bei drehbarer Lagerung
• v = v 0 = 0 in einer Einspannung
• v1 = v2 , v10 = v20 am Übergang zwischen Bereichen unterschiedlicher Beanspruchung
• v1 = v2 , v10 = v20 = 0 am Übergang in der Mitte eines symmetrischen
Problems
45
11.4 Schiefe Biegung
Zeigt das Biegemoment nicht in eine der Hauptrichtungen, dann sprechen wir von
schiefer Biegung. Der entscheidende Schritt bei der schiefen Biegung ist, dass wir
das Biegemoment in die beiden Hauptrichtungen des Querschnittes aufteilen
M b = M2 · e 2 + M3 · e 3
(83)
11.4.1 Normalspannung durch Biegung
Die Formeln sind ähnlich zu denen der speziellen Biegung. Die Normalspannungen
hängen jetzt aber von den Koordinaten der Hauptrichtungen x2 , x3 ab
x
=
M3
M2
· x2 +
· x3
I3
I2
(84)
Beachte: Die Vorzeichen leitet man sich durch kurzes Überlegen am besten jeweils
erneut her, da die Hauptrichtungen 1 und 2 nicht allgemein festgelegt sind. Aus
Gleichung (84) ergibt sich die Geradengleichung für die Neutralachse
x3 =
I 2 M3
·
· x2
I 3 M2
(85)
11.4.2 Biegelinie
Auch die Biegelinie muss in die beiden Hauptrichtungen aufgeteilt werden.
v = v2 · e 2 + v3 · e 3
(86)
Es müssen dann zwei Differentialgleichungen gelöst werden. Ansonsten ist das
Vorgehen das gleiche wie beim Fall der speziellen Biegung
M3
M2
und
v300 (x) =
(87)
E · I3
E · I2
Bemerkung: Der Verschiebungsvektor ist immer senkrecht zu der Neutralachse!
v200 (x) =
46
11.5 Querkraft
Wenn wir eine Querkraft haben, welche am Stab angreift, so gilt für die Schubspannung im Querschnitt:
⌧xy (x, y) = ⌧yx (x, y) =
V (x) · Qz (y)
Iz · b(y)
(88)
Wobei V die an diesem Querschnitt wirkende Querkraft, Iz das Flächenträgheitsmoment bezüglich der z-Achse durch den Flächenmittelpunkt, b(y) die Breite des
Querschnittes in Abhängigkeit des Abstandes vom Flächenmittelpunkt und Qz (y)
das Flächenmoment 1. Grades ist.
11.5.1 Flächenmoment 1. Grades
Das Flächenmoment ersten Grades (bezüglich z-Achse) berechnet sich folgendermassen:
Abbildung 32: Zum Flächenträgheitsmoment ersten Grades, Ingenieurwissenschaften 2, zweite Auflage, Vieweg+Teubner Verlag, Wiesbaden 2009, Seite 162, Fig. 20.11
Qz (y) :=
ZZ
yc0 dA =
Z
zmax
zmin
Z
ymax
y
0
yc0 dy dz = yc0
Z
zmax
zmin
Z
ymax
y
dy 0 dz = yc0 ·
A(y)
(89)
wobei A(y) die Fläche des “aufgefüllten“ Flächenstücks und yc0 der Abstand zur
Neutralachse des Flächenmittelpunktes dieses Flächenstückes ist. Man beachte, dass
yc0 im Allgemeinen eine Funktion von y, nicht aber von der Integrationslaufvariable
y 0 bzw dy 0 ist.
47
11.6 Schubspannungsfluss in dünnwandigen Querschnitten
Bisher haben wir nur Schubspannungsverläufe an allgemeinen rechteckigen Querschnitten betrachtet. Dabei haben wir die Schubspannungen berechnet nach
⌧xy (x, y) = ⌧yx (x, y) =
V (x) · Q(y)
Iz · b(y)
(90)
und sind davon ausgegangen, dass die Schubspannungen in Richtung der angreifenden Querkraft fliessen. Bei dünnwandigen Querschnitten (dh. b << L) behält obige
Formel ihre Gültigkeit, allerdings fliessen die Schubspannungen neu nicht unbedingt
in Richtung von V sondern parallel zum Rand.
11.6.1 Typische Verläufe
Es lassen sich grundsätzlich zwei typische Schubspannungsverläufe unterscheiden.
Für den einen Fall greift die Querkraft senkrecht zum Balken an und im anderen
Fall greift die Querkraft längs zum Balken an.
Abbildung 33: Links: Querkraft senkrecht zum Balken. Rechts: Querkraft längs zum
Balken
(Q(y) = yc0 ·
A(⌘))
(91)
Der Verlauf der Schubspannungsflüsse wird maßgeblich durch das Flächenträgheitsmoment 1. Grades bestimmt. Anders als bei dickwandigen Querschnitten ist A
jetzt nicht mehr ausschliesslich von y abhängig, da Schubspannungen bei dünnwandigem Querschnitt entlang der grösseren Ausdehnung fliessen. Deshalb führt man
eine Laufvariable ⌘ entlang des Querschnittes ein und drückt diese durch y aus.
1. Querkraft senkrecht:
Für diesen Fall ist der Verlauf der Schubspannungen linear. Der Abstand in
y-Richtung zum Flächenmittelpunkt ist konstant (yc0 = const.), wodurch wir
48
nur eine lineare Abhängigkeit der Laufvariable in A(⌘) erhalten. Für diese
Lage des Balken ist das Flächenmoment 1. Grades nicht von y sondern von z
abhängig.
2. Querkraft längs:
Für diesen Fall ist der Verlauf der Schubspannungen parabolisch. Hier ist
sowohl yc0 als auch A(⌘) von y abhängig. Durch die Multiplikation erhalten
wird einen parabolischen Verlauf mit dem Maximum in der Mitte des Balken.
11.6.2 Schubspannungsverlauf skizzieren
Wie erhält man an einem Querschnitt den Schubspannungsverlauf? Man muss gewisse Rand- und Übergangsbedingungen beachten, wenn man den Schubspannungsverlauf skizziert:
• Die Enden des Querschnittes sind immer spannungsfrei
• Der Schubspannungsverlauf ist immer stetig (keine Diskontinuität)
• Ist der Verlauf im Balken linear oder parabolisch?
• Die Schubspannungen laufen generell in Richtung der Querkraft
• Die Schubspannung auf der Symmetrieachse längs der Querkraft V ist 0
• Symmetrieachsen der Querschnittsform sind auch Symmetrieachsen des Schubspannungsverteilung
11.6.3 Maximale Schubspannungen
Ähnlich wie bei den maximalen Normalspannungen liegt es natürlich im Interesse des Ingenieurs zu wissen, wo die maximalen Schubspannungen auftreten. Diese
Spannungsspitzen treten dort auf, wo der Gradient der Spannungen am größten ist,
oder einfach ausgedrückt:
• An besonders dünnen Stellen des Querschnittes
• An Ecken, die für den Querschnitt größer als 180° sind
11.6.4 Schubspannungsverlauf in zusammengebauten Querschnitten
Wird ein Querschnitt aus mehreren Körpern zusammengebaut (z.B. geklebt, genagelt, etc.) wirken die durch Belastung induzierten Spannungen natürlich auch auf
49
diese Verbindungsstellen. Meistens sind dies die Stellen, wo ein solcher Querschnitt
versagt. Die Spannungen auf die Verbindungsstellen können mit Hilfe des Schubfluss
es bestimmt werden.
VQ
(92)
I
wobei V die wirkende Querkraft ist, I das Flächenträgheitsmoment 2. Grades des
gesamten Querschnittes und Q das Flächenträgheitsmoment 1. Grades der Teilfläche, an der der Schubfluss bestimmt werden soll. Beispiele für die Teilflächen sind
in der folgenden Abbildung dargestellt.
q=
Abbildung 34: Teilflächen zur Berechnung des Flächenträgheitsmomentes 1. Ordnung für den Schubfluss. (Mechanics of Materials S. 379).
50
11.6.5 Schubmittelpunkt für offene dünnwandige Querschnitte
Wir betrachten folgendes Problem:
Abbildung 35: (Mechanics of Materials S. 392).
Dadurch dass der Querschnitt nicht geschlossen ist, erhalten wir durch die Schubspannungen ein resultierendes Moment und der Balken wird nicht nur nach unten
geboten, sondern verdreht sich zusätzlich. Wirkt die Kraft P exzentrisch mit dem
Abstand e, wird das resultierende Moment grade aufgehoben und der Balken verdreht sich nicht mehr.
e=
Ff d
P
51
(93)
11.7 Überlagerte Spannungszustände
11.7.1 Dünnwandige Kessel
Ein typisches Ingenieurproblem ist die Auslegung von dünnwandigen Kesseln. Wir
unterscheiden zwei grundlegende Fälle: Zylindrische und sphärische Kessel. Für diese
zwei Fälle gelten folgende Formeln:
Zylindrisch:
1
=
pr
t
2
=
pr
2t
(94)
pr
2t
Wobei r der Radius, p der Druck im Kessel und t die Dicke des Kessel ist.
Sphärisch:
1
=
2
=
(95)
Abbildung 36: (Mechanics of Materials S. 432).
11.7.2 Zusammenstellung der Spannungszustände
In den letzten Kapiteln haben wir vier unterschiedliche Belastungsfälle und deren
charakteristischen Spannungen analysiert. Für kleine Deformationen kann man die
entstehenden Spannungen einfach addieren und erhält den kompletten Spannungszustand. Die folgenden Formeln gelten für die jeweiligen Zustände:
Axiale Beanspruchung:
Querkraft Beanspruchung:
Biegebeanspruchung:
Beanspruchung durch Torsion:
52
N
A
VQ
⌧=
It
Mz
=
·y
Iz
T
⌧=
·r
Ip
=
(96)
(97)
(98)
(99)
Abbildung 37: (Mechanics of Materials S. 432).
53
12 Spannungstransformation
Für das folgende Kapitel wird die Annahme getroffen, dass es sich bei einem Spannungszustand nicht um einen allgemeinen handelt (6 Spannungskomponenten), sondern um einen ebenen Spannungszustand (3 Spannungskomponenten: x , y , ⌧xy ).
Diese Approximation ist in den meisten Fällen sinnvoll und vereinfach die Rechnungen deutlich.
12.1 Richtungstransformation
Kennen wir den ebenen Spannungszustand in einem Punkt ( x , y , ⌧xy sind bekannt),
so können wir die entsprechenden Spannungen bestimmen, an einem Flächenelement, das um den Winkel ✓ gedreht ist. Der Gedanke hinter diesen Transformationen ist, die maximale Spannung zu finden, um so Vorhersagen treffen zu können, ob
das Material versagt.
x0
y0
+
2
x+
=
2
=
x
y
+
y
x
y
cos 2✓ + ⌧xy sin 2✓
(100)
y
cos 2✓
(101)
2
x
2
x
⌧xy sin 2✓
y
sin 2✓ + ⌧xy cos 2✓
(102)
2
Die Vorzeichenkonvention lässt sich aus Abbildung 38 entnehmen. Dabei gilt,
dass nach rechts die x-Achse positiv ist und nach oben die y-Achse positiv ist.
Entsprechend werden die Spannungen eingezeichnet.
⌧ x0 y 0 =
12.2 Hauptspannungen
Die Orientierung, bei der die maximale Spannung entsteht, wird Hauptrichtung
genannt. Wir erhalten zwei Hauptspannungen: eine maximale und eine minimale.
Die Schubspannung an diesem Flächenelement verschwindet!
s✓
◆2
+
x
y
x
y
2
±
+ ⌧xy
, ⌧ =0
(103)
1,2 =
2
2
Der Winkel um den das Hauptachsensystem gedreht ist bezüglich des ursprünglichen Koordinatensystems lässt sich mit der folgenden Gleichung bestimmen.
tan 2✓p =
2⌧xy
x
(104)
y
Je nach Material interessiert die maximale Normalspannung oder die maximale
Schubspannung. Die maximale Schubspannung in der Ebene (maximum in-plane
54
Abbildung 38: (Mechanics of Materials S. 480).
shear stress, ⌧max ) finden wir an dem Flächenelement, welches um 45 gegenüber
i. p.
des Hauptachsensystems gedreht ist. Entsprechend haben wir dann ⌧max und eine
mittlere Normalspannung
i. p.
avg .
⌧max =
i. p.
avg
=
s✓
x
+
2
x
y
2
y
◆2
2
+ ⌧xy
(105)
(106)
Falls ⌧max > avg und ebener Spannungszustand ( z = 0, ⌧xz = ⌧yz = 0), ist
dies auch gleich die absolute höchste Schubspannung (absolute maximum shear
stress, ⌧ abs ). Sind diese Bedingungen jedoch nicht erfüllte, siehe die entsprechenden
max
Betrachtungen am Mohr’schen Spannungkreis im Kapitel 12.4.
12.3 Mohr’scher Spannungskreis
Eine weitere Möglichkeit einen Spannungszustand zu analysieren ist der Mohr’sche
Kreis (Abbildung 40). Dieser bietet eine grafische Analyse der Spannungen, die in
einem Punkt wirken. Eine sehr ausführliche und gute Anleitung, wie man bei diesem
Aufgabentyp vorgeht, findet man auf Seite 463 von Mechanics of Materials. Man
trägt den gegebenen Spannungszustand in ein
⌧ -Koordinatensystem ein (Achtung: Die ⌧ Achse zeigt nach unten!). Dieser Spannungszustand liegt auf dem Rand
55
des Kreises. Der Mittelpunkt des Kreises liegt auf der -Achse und lässt sich bestimmen mit Gleichung (106). Der Radius des Kreises entspricht grade der maximalen
Schubspannung in der Ebene, also Gleichung (105). Mit den gegebenen Informationen lässt sich nun ein Kreis konstruieren. Die Hauptspannungen entsprechen den
Schnittpunkten mit der -Achse (⌧ = 0). Wichtig zu beachten ist zudem, dass eine
Drehung im Mohr’schen Kreis um den Winkel 2✓ eine Drehung in der physikalischen
Ebene um den Winkel ✓ bedeutet.
Abbildung 39: (Mechanics of Materials S. 481).
12.4 Maximale Schubspannung
Um die wirkliche maximale Schubspannung zu bestimmen, muss man zwei Fälle unterscheiden. Dabei sollte man sich in Erinnerung rufen, dass wir nur ebene
Spannungszustände betrachten. In dem Fall ist unsere dritte Hauptspannung immer
gleich null ( 3 = 0).
1
·
>0
Dieser Fall bedeutet, dass die beiden Hauptspannungen das gleiche Vorzeichen
haben (also entweder beide Zug oder beide Druck). Dann ist die maximale
Schubspannung gegeben durch
2
⌧ abs =
max
1
·
1
(107)
2
<0
Dieser Fall bedeutet, dass die Vorzeichen der Hauptspannungen unterschiedlich sind (also Druck und Zug, oder Zug und Druck). Dann ist die maximale
Schubspannung gegeben durch
2
⌧ abs =
1
2
2
max
56
= ⌧max
i. p.
(108)
Die zwei obigen Gleichungen kann man sich gut merken, wenn man sich die
entsprechenden Mohr’schen Kreise dazu aufzeichnet. Dadurch, dass wir die dritte Hauptspannungen 3 = 0 mit betrachten müssen, erhalten wir auch 3 Kreise.
Jeweils zwischen zwei Hauptspannungen.
Abbildung 40: Links:
474f).
1
·
2
> 0, Rechts:
57
1
·
2
< 0 (Mechanics of Materials S.
13 Dehnungstransformation
Ganz analog zu den Spannungstransformationen kann man auch für Dehnungen
die entsprechenden Richtungstransformationen durchführen. Man kann zudem auch
einen Mohr’schen Kreis für Dehnungen zeichnen und auch für die absolut maximale
Schubdehnung, gelten die gleichen Gesetzmässigkeiten, wie für Spannungen.
13.1 Übersicht
Im folgenden wird eine Übersicht, über die Formeln gegeben.
Richtungstransformation:
" x0 =
"x + "y "x "y
xy
+
cos 2✓ +
sin 2✓
2
2
2
(109)
"y 0 =
"x + "y
2
(110)
x0 y 0
2
"x
2
"x
=
"y
"y
2
xy
cos 2✓
sin 2✓ +
2
xy
2
sin 2✓
(111)
cos 2✓
Hauptdehnungen:
"1,2
"x + "y
=
±
2
s✓
"x
"y
2
◆2
+
⇣
xy
2
⌘2
Maximale Schubdehnung in der Ebene:
s✓
◆2 ⇣
⌘2
"x "y
max
xy
=
+
2
2
2
"avg =
"x + "y
2
,
=0
(112)
(113)
(114)
13.2 Dehnungsrosetten
Um den Dehnungszustand in einem Punkt messen zu können, benutzt man sogenannte Dehnmessstreifen (DMS, electrical-resistance strain gauge). Durch Längenänderung verändert sich der Widerstand eines elektrischen Leiters und diese Änderung kann gemessen werden. DMS können allerdings nur die Dehnung in eine Richtung messen. Möchte man also den kompletten Dehnungszustand messen, braucht
man 3 DMS, die jeweils in andere Richtungen messen. Für drei unterschiedliche
58
Orientierungen ✓a , ✓b , ✓c misst man die Dehnungen "a , "b , "c und kann mit folgenden
Gleichungen den Dehnungszustand bestimmen.
"a = "x cos2 ✓a + "y sin2 ✓a +
"b = "x cos2 ✓b + "y sin2 ✓b +
"c = "x cos2 ✓c + "y sin2 ✓c +
sin ✓a cos ✓a
xy sin ✓b cos ✓b
xy sin ✓c cos ✓c
xy
Abbildung 41: (Mechanics of Materials S. 504).
59
(115)
(116)
(117)
13.3 Materialversagen
Es gibt je nach Material verschiedene Versagensformen. Entsprechend ist auch eine
andere Belastungsgrösse ausschlaggebend. Wir unterscheiden primär spröde (brittle) und duktile (ductile) Materialien.
13.3.1 Duktiles Material
Maximum-Shear-Stress Theory
Gemäss diesem Ansatz tritt bei duktilem Material das Versagen bei der maximalen
Schubspannung auf. Um Versagen zu verhindern, lässt sich die maximal zulässige
Schubspanung als Funktion der Fliessgrenze ( Y ) darstellen.
⌧ abs =
max
Y
(118)
2
Wobei ⌧ abs gemäss Kapitel 12.4 ermittelt wird.
max
Maximum-Distortion-Energy Theory
Durch die Deformation wird Energie im Material gespeichert. Wird die innere Energie erreicht, welche bei einem einfachen Zugversuch zu Fliessen führt, so kommt es
zum Versagen. Für ebene Spannungszustände lässt sich daraus folgende Bedingung
herleiten:
2
1
1 2
+
2
2
=
2
Y
(119)
Beide Methoden liefern vergleichbare Resultate, wobei die Maximum-DistrotionEnergy Variante bei reiner Beanspruchung genauer ist. Die maximal zulässige Schubspannung ist in den meisten Fällen hingegen etwas leichter zu berechnen.
13.3.2 Sprödes Material
Maximum-Normal-Stress Theory
Sprödes Material bricht wenn eine maximal zulässige Normalspannung ( ult ) überschritten wird. Daher muss bei einem ebenen Spannungszustand der Betrag der
Hauptspannungen (maximale Normalspannungen) mit dieser Bruchspannung verglichen werden.
| 1 | = | ult |
(120)
| 2 | = | ult |
Die damit erzielten Resultate sind sehr gut für Materialien welche ein ähnliches
Spannungs-Dehnungs Diagram für Druck und Zug haben.
60
14 Energiemethoden und Deformationsenergie
14.1 Deformationsenergie
Die Deformationsenergie berechnet sich wie folgt:
Z L
Z L 2
Z L
N2
M2
M32
T2
U=
ds +
+
ds +
ds
2EI2 2EI3
0 2AE
0
0 2GIp
(121)
14.2 Satz von Castigliano
Der Satz von Castigliano besagt, dass die Deformationsenergie abgeleitet nach einer
Kraft die Verschiebung im Kraftangriffspunkt ergibt (abgeleitet nach einem Moment
ergibt die Verdrehung).
k
=
@U
@Fk
@U
@Mi
Daraus ergeben sich verschiedenste Anwendungsmöglichkeiten (Siehe 1.2.2)
↵i =
(122)
(123)
14.2.1 Kochrezept
1. Alle Kräfte und Momente eindeutig benennen (Bsp. F1 , F2 )
2. Beanspruchung und Deformationsenergie aufstellen in Abhängigkeit der eindeutig benannten Kräfte und Momente.
3. Deformationsenergie nach der Kraft (resp. dem Moment) an der gefragten
Stelle ableiten.
4. Falls Betrag der Kraft gesucht (Lagerkraft in statisch unbestimmtem System):
Ableitung null setzen und Betrag bestimmen. Falls Verschiebung gesucht: Beträge der bekannten Kräfte in die Ableitung einsetzen und Verschiebung
bestimmen.
14.2.2 Verschiebung an einem Punkt ohne Kraftangriff
Will man die Verschiebung an einem Punkt berechnen, an welchem keine Kraft
angreift, muss man sich einer Hilfskraft bedienen. Man führt am gefragten Punkt eine
61
Hilfskraft in Verschiebungsrichtung ein. Danach führt man das Kochrezept durch.
Bei Punkt 4 setzt man den Betrag der Hilfskraft = 0.
14.2.3 Bestimmen von Lagerkräften am statisch unbestimmten Problem
Mit dem Satz von Castigliano lassen sich auch Lagerkräfte bestimmen. Als Kraft
nach der man ableitet wählt man eine aus, von der man weiss, dass an dem Angriffspunkt in Kraftrichtung keine Verschiebung stattfindet. (Man spricht vom "Bindungen lösen", da man Bindungskäfte als äussere Kräfte einführt). Man führt das
Kochrezept (1.2.1) durch. Nach dem Punkt 4 abeschlossen ist setzt man die erhaltene
Verschiebung = 0 und löst nach der gefragten Lagerkraft auf. Bei n-fach unbestimmten Systemen wird dieser Trick n-fach angewendet. Man erhält ein Gleichungssystem
mit n Gleichungen.
14.3 Arbeitsgleichungen
Die Arbeitsgleichungen funktionieren ähnlich wie der Satz von Castigliano. Sie ermöglichen die Verschiebung resp. Verdrehung (hier ) an einem Punkt zu berechnen.
Die Grundlegende Formel dazu sieht folgendermassen aus:
Z L
Z L
Z L
N (x)
Mb (x)
T (x)
=
n(x)
ds +
mb (x)
ds +
t(x)
ds
(124)
AE
EI
GIp
0
0
0
wobei alle klein geschriebenen Komponenten aus dem statisch bestimmten Ersatzproblem hergeleitet werden und alle nicht überstrichenen aus dem ursprünglich
gegebenen Problem.
14.3.1 Kochrezept
1. Berechnen der Beanspruchung N (x) (oder Mb (x), T (x)) am gegebenen Problem
2. Wahl eines statisch bestimmten Ersatzproblems ohne Belastungen aber gleicher Lagerung (keine äusseren Kräfte, Gewicht ect. aber Lagerreaktionen)
3. Einführen einer Einheitskraft (oder Ersatzmoment, Betrag jeweils 1) an der
gefragten Stelle in die gefragte Richtung.
4. Berechnen der Beanspruchung n(x) (oder mb (x), t(x)) am statisch bestimmten
Ersatzproblem
5. Berechnen der Verschiebung/Verdrehung gemäss obiger Formel
62
14.3.2 Statisch bestimmtes Ersatzproblem
Das statisch bestimmte Ersatzproblem (sbEp) hilft uns mit den Arbeitsgleichungen
Verschiebungen, Verdrehungen oder Lagerkräfte zu bestimmen. Dazu hält man sich
an folgende Schritte:
1. Man streicht alle äußeren Lasten (Lagerkräfte sind keine äußeren Lasten)
2. Eliminiere so viele Lagerkräfte, bis das System statisch bestimmt ist
3. An der zu untersuchenden Stelle führt man eine Einzelkraft / ein Einzelmoment ein
4. Bestimme die Lagerkräfte in Abhängigkeit von dieser Einzelkraft
5. Berechne nun die Beanspruchungskomponenten n(x), mb (x) und t(x)
63
15 Knickung
Wird ein Balken auf Druck belastet kann es zum einen zu Fliessen kommen, wenn
die Normalspannung ( = N/A) größer ist, als die Fliessspannung ( y ). Bei dünnen
Stäben kann es zusätzlich zu dem Phänomen der Knickung kommen. Knickung kann
auch eintreten, wenn die Spannungen in dem Balken kleiner sind als die Fliessspannung. Die maximale Last, bevor ein Stab knickt, wird durch die Euler Gleichung
beschrieben.
⇡ 2 EI
Pcr =
(KL)2
(125)
In dieser Gleichung beschreibt K den ’effective-length factor’. Je nach Lagerung
des Balkens ist die effektive Länge des Balkens unterschiedlich. Die Werte für K
lassen sich aus den unterschiedlichen Randbedingungen berechnen, die man für die
Lösung der Differentialgleichung benötigt. Für die gängigen Lagerungen sind in der
folgenden Grafik die effektiven Längen angegeben.
Abbildung 42: (Mechanics of Materials S. 667).
Wichtig: Knicken passiert immer über die ’schwache’ Achse. Es wird also das
kleinere Flächenträgheitsmoment des Querschnittes gewählt!
64
15.1 Exzentrischer Lastangriff
Greift an einem Balken eine Last exzentrische an, entstehen nicht nur Normalspannungen durch die axiale Last, sondern auch Normalspannungen, die durch Biegung
induziert werden. Die maximale Verschiebung und Spannung, die durch diese exzentrische Last entstehen, befinden sich in der Mitte des Stabes und lassen sich durch
folgende zwei Formeln einfach bestimmen.
"
!
#
r
P L
vmax = e sec
1
(126)
EI 2
"
!#
r
P
ecA
P L
1+
· sec
(127)
max =
A
I
EI 2
P : angreifende Last, A: Querschnitt, e: Exzentrizität der Last, c: maximaler Abstand vom Mittelpunkt des Querschnittes, zu dem Punkt maximaler Spannung, I:
Flächenträgheitsmoment, L: Länge des Balkens, E: E-Modul.
Wichtig: die Maximale Spannung entsteht in der Richtung der ’starken Achse’. Es
wird für hier also das größere Flächenträgheitsmoment des Querschnittes gewählt!
Abbildung 43: (Mechanics of Materials S. 681).
65
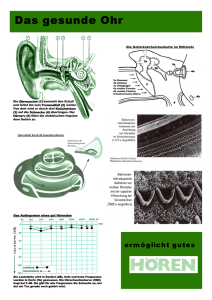

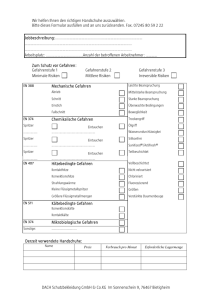
![übung_teil_1 [Schreibgeschützt] - Department für Bautechnik und](http://s1.studylibde.com/store/data/006647141_1-8bace80afd19f873de1542a2d132ba9d-300x300.png)