Regelung - Uni Ulm
Werbung

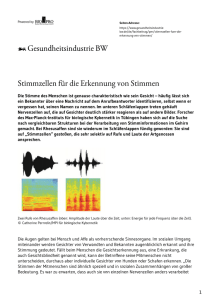
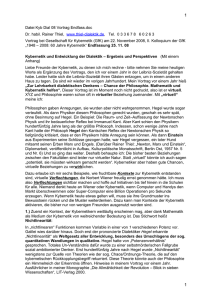
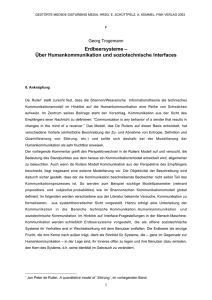
Kybernetik Regelung Mohamed Oubbati Institut für Neuroinformatik Tel.: (+49) 731 / 50 24153 [email protected] 19. 06. 2012 Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Was ist Regelung? Regelung ist eine gezielte Beeinflussung dynamischer Systeme, so dass eine gewünschte Betriebsart eingestellt wird. u(t)? Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) y(t)Æ r Gs Regelung (gewünschtes Verhalten) SoSe12 u ≤ k1 1 ( s + 2 )( s − 4 ) y → ∞ Dieses System ist unstabil. Kann man es stabilisieren ? Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 u ≤ k1 1 ( s + 2 )( s − 4 ) Eine Lösung u ≤ k1 s−4 Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) y → ∞ remove the pole(s), who provoked instability! 1 ( s + 2 )( s − 4 ) Regelung y ≤ k2 SoSe12 Steuerung vs. Regelung Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Steuerung vs. Regelung Goal: find the input u, so that the output y approximates a desired reference trajectory r! u(t)? Aufgabe: u(t)? sodass One way to achieve this is to set r Gs Gc y(t)Æ r e = r − y →0 1 Gc = Gs u(t) ⇒ y(t) → r(t) Gs y(t) Diese Lösung heißt: Steuerung Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Steuerung vs. Regelung Steuerung aber wenn Störungen da sind,… Störungen d r(t) u(t) Gc + Gs y(t) Steuerung Y = GcG s R + d …die Abweichung e=r-y wird nie minimiert, und y kann r nicht verfolgen ! Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Steuerung vs. Regelung R Regelung E + u(t) Gc y(t) Gs - GcGs Y = 1 + GcGs if GcGs >> 1 Æ Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) R E ≈0 Æ Regelung Y ≈R SoSe12 Steuerung vs. Regelung Regelung und wenn Störungen da sind… Störungen d R E + Gc u(t) + + Gs y(t) - Y = Wenn GcGs 1 R+ d 1 + GcGs 1 + GcGs GcGs >> 1 und E= 1 1 R− d 1 + GcGs 1 + GcGs Æ der Effekt der Störung wird minimiert E ≈0 Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Æ Regelung 1 d →0 1+ GcGs Y ≈R SoSe12 Regelkreis Allgemeine Anforderungen an einen Regelkreis Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Regelkreis Grundsätzlicher Aufbau von Regelkreisen Regeldifferenz e Sollwert Stellgröße Regler + Regelgröße System - Sensor Die Grundaufgabe ist es, der geschlossene Regelkreis asymptotisch Stabil bleibt. Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 emax (Maximale Überschwingweite) (overshoot) gibt die maximale Regelabweichung an, die nach dem erstmaligen Erreichen des Sollwertes auftritt. emax Bleibende Regeldifferenz (steady state error) ist die Abweichung der Sollwert von der Istwert für t → ∞ Sollwert Antwort des Systems Tan (Anregelzeit) (rise time) Zeitpunkt, zu dem der sollwert erstmals erreicht wird. Taus (Ausregelzeit) (transient time): Zeitpunkt, ab dem die Regelabweichung kleiner als eine vorgegebene Schranke. Tan Taus Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12 Allgemeine Anforderungen an einen Regelkreis An eine Regelung werden vier Anforderungen gestellt: Kleine bleibende Regeldifferenz. geringes Überschwingen. Kleine Anregelzeit. Kleine Ausregelzeit. Dr. Oubbati, Kybernetik (Neuroinformatik, Uni-Ulm) Regelung SoSe12